






Bahasa
Halaman
Hukum

3
BAB II
TINJAUAN PUSTAKA
2.1 Hasil Penelitian Sebelumnya
Sebelumnya telah ada penelitian yang serupa berjudul Sistem Pengaturan
Kecepatan Motor Pada Robot Line Follower Berbeban Menggunakan Kontroler PID.
Sistem pengaturan kestabilan kecepatan motor pada robot line follower
berbeban ini menggunakan Kontroler ProporsionalIntegral Differential (PID) berbasis
ATMega8 dan ATMega16. PID merupakan gabungan dari tiga kontroler yaitu
Kontroler Proporsional,Kontroler Integral dan Kontroler Differential. Gabungan dari
ketiga kontroler ini diharapkan agar mendapat keluaran sistem yang stabil karena bisa
saling menutupi kekurangan.Keuntungan dari kontroler PID adalah merupakan
sebuah sistem yang sederhana sehingga lebih cepat dalam mengambil sebuah
keputusan. Diharapkan dengan menggunakan kontroler PID kesetabilan kecepatan
motor terjaga pada nilai yang diinginkan, dan reaksi sistem yang didapatkan cepat.
2.2 Konsep Dasar
2.2.1 Robot Line Follower
Line Follower Robot adalah sebuah jenis robot yang termasuk kedalam
kategori robot mobile yang di desain untuk bekerja secara autonomous dan
memiliki kemampuan dapat mendeteksi dan bergerak mengikuti (follows) garis
yang ada di permukaan. Sistem kendali yang digunakan dirancang untuk bisa
3
4
merasakan jalur garis yang ada dan melakukan manuver gerakan agar tetap bisa
mengikuti garis tersebut.
Ada dua macam robot line follower yaitu line follower biasa tanpa
menggunakan program dan line follower dengan program microkontroler.hanya
saja yang menggunakan program microkontroler lebih komplek dan lebih
sempurna jika di banding line follower yang tanpa menggunakan program.
Robot jenis ini lumayan banyak diminati bagi mereka yang baru belajar
teknologi robot Bahkan kompetisi-kompetisi Line Follower Robot, secara rutin
sering diadakan di berbagai universitas di indonesia. Dalam bidang industri,
robot jenis ini sering digunakan untuk untuk memindahkan barang dari satu
tempat ke tempat yang lain.
Dengan memodifikasi sedikit sensornya maka robot line follower bisa
dikembangkan menjadi Robot Wall Follower, sebuah robot yang bisa bergerak
mengitari dinding.
Gambar 2.1 Robot Line Follower
4

5
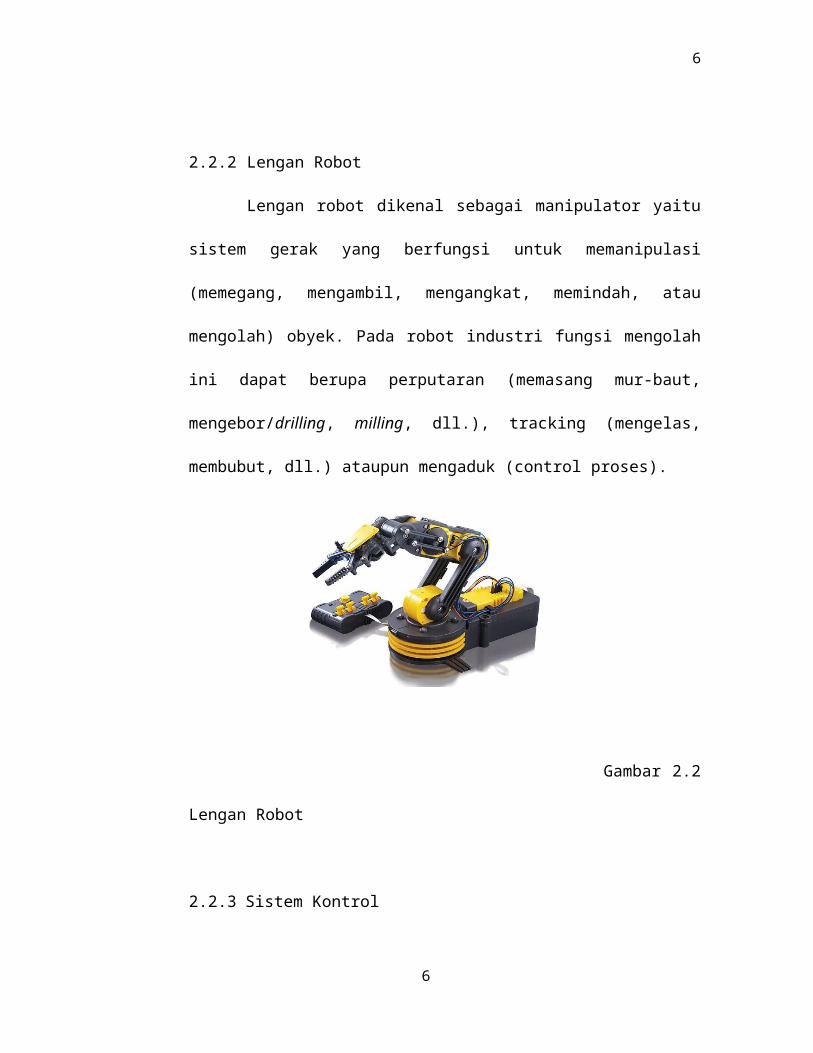
2.2.2 Lengan Robot
Lengan robot dikenal sebagai manipulator yaitu sistem gerak yang
berfungsi untuk memanipulasi (memegang, mengambil, mengangkat,
memindah, atau mengolah) obyek. Pada robot industri fungsi mengolah ini
dapat berupa perputaran (memasang mur-baut, mengebor/drilling, milling, dll.),
tracking (mengelas, membubut, dll.) ataupun mengaduk (control proses).
Gambar 2.2 Lengan Robot
2.2.3 Sistem Kontrol
Sistem kontrol (control system) adalah suatu alat (kumpulan alat)
untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem.
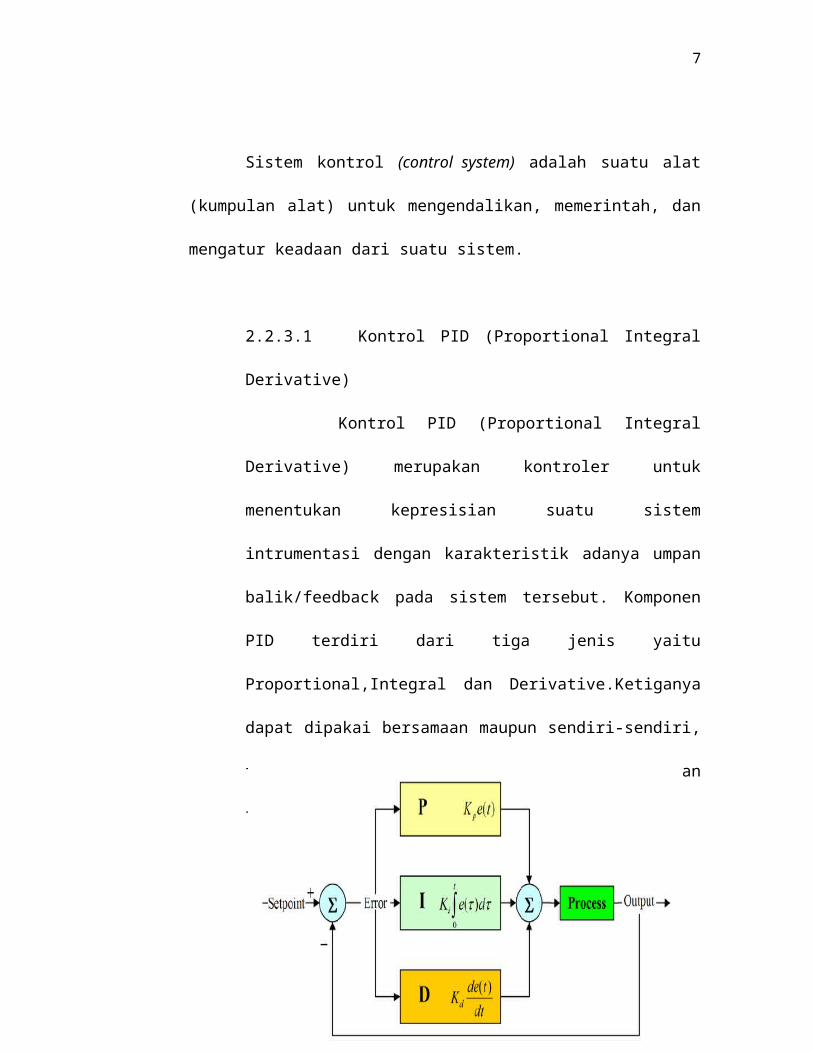
2.2.3.1 Kontrol PID (Proportional Integral Derivative)
Kontrol PID (Proportional Integral Derivative) merupakan
kontroler untuk menentukan kepresisian suatu sistem intrumentasi
dengan karakteristik adanya umpan balik/feedback pada sistem
5
6
tersebut. Komponen PID terdiri dari tiga jenis yaitu
Proportional,Integral dan Derivative.Ketiganya dapat dipakai
bersamaan maupun sendiri-sendiri, tergantung dari respon yang kita
inginkan terhadap suatu plant.
Gambar 2.3 Blok Diagram PID
Ada tiga macam control PID yaitu kontrol PI,PD dan PID. PI
adalah kontrol yang menggunakan komponen proportional dan
integrative. PD adalah kontrol yang menggunakan komponen
proportional dan derivative. Dan PID adalah kontrol yang
menggunakan komponen proportional,integrative dan derivative.
6
7
2.2.3.2 Kontrol PI
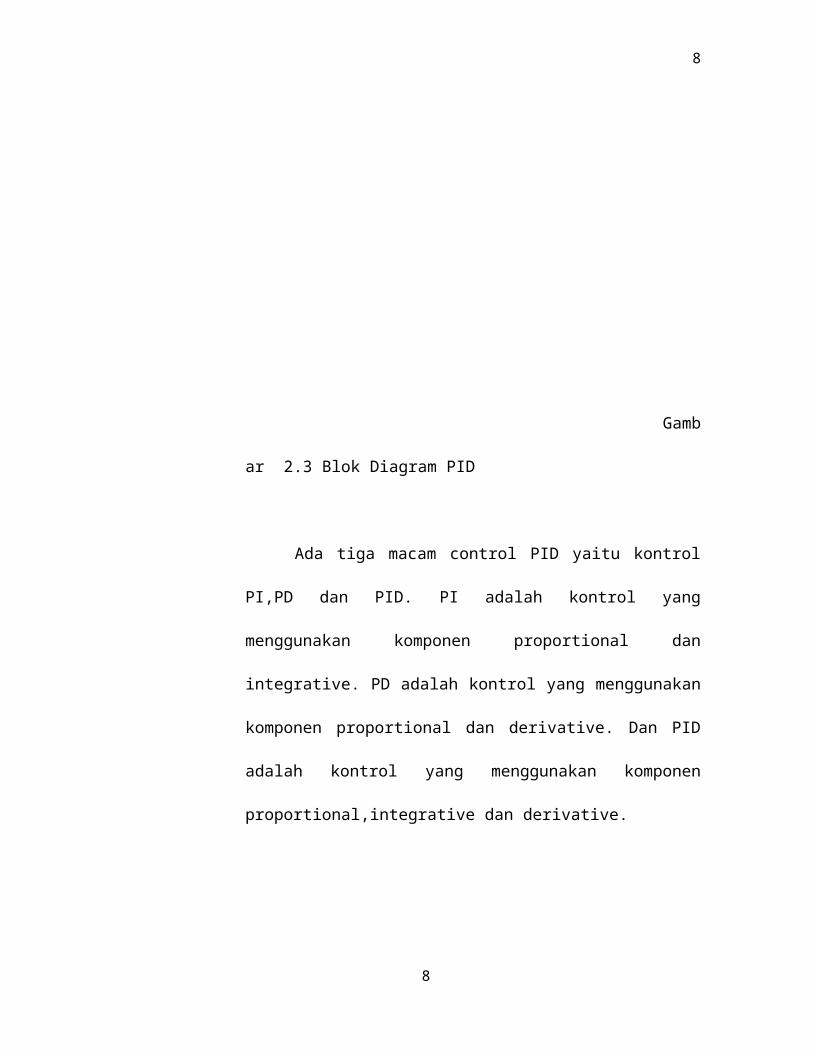
2.2.3.2.1 Kontrol Proportional
Kontroler yang merupakan sebuah penguat input sehingga
hasil pada output tidak semakin menjadi kecil pada sebuah sistem.
Output proportional adalah hasil perkalian antara kostanta proportional
dengan nilai erornya. Perubahan yang terjadi pada sinyal input akan
menyebabkan sistem secara langsung mengubah output sebesar
kostanta pengalinya.
Gambar 2.4 Blok Diagram KP
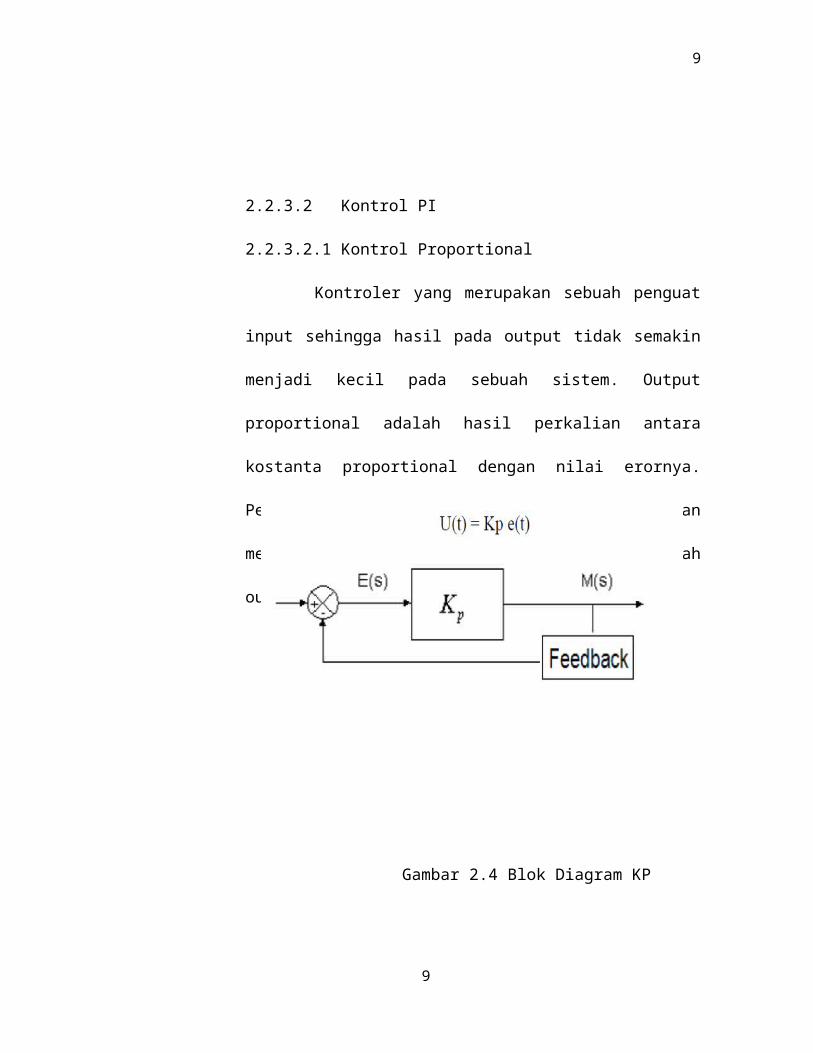
Jika nilai kp kecil, kontroler proportional hanya mampu
melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan
respon sistem yang lambat.
7
8
Gambar 2.5 Nilai Kp Kecil
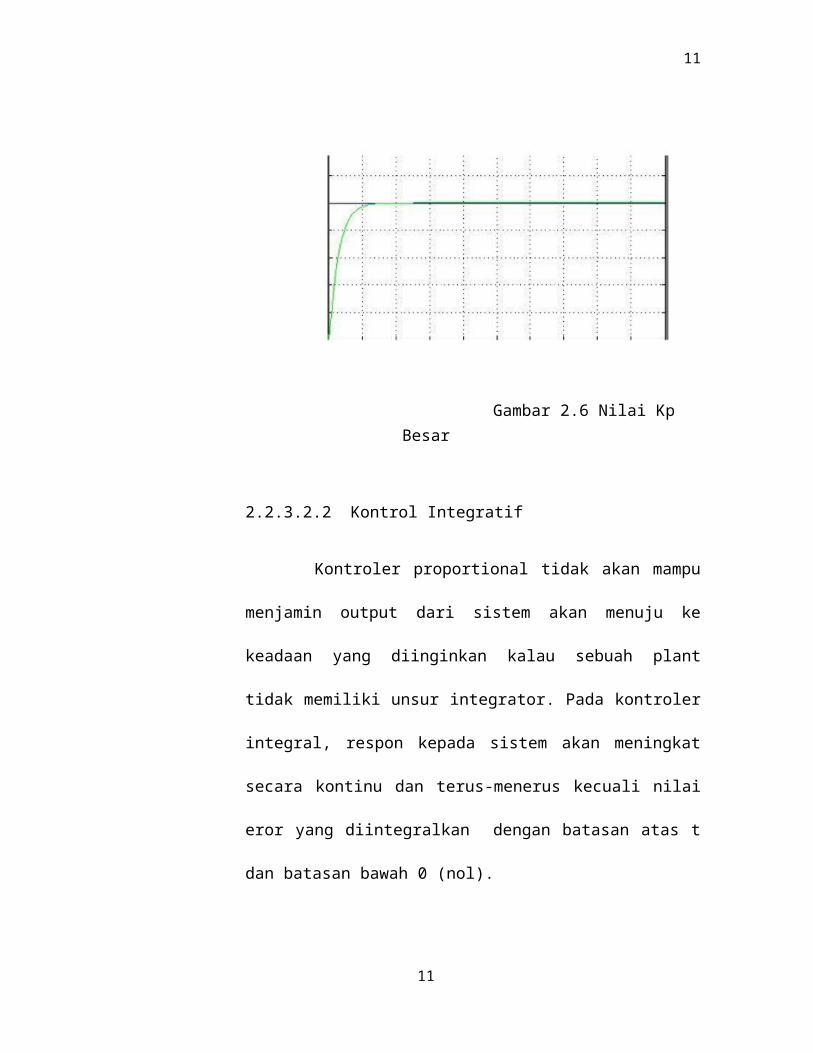
Jika nilai kp besar, respon sistem menunjukan semakin cepat
mencapai keadaan yang stabil, tetapi juga memungkinkan motor
berputar diatas set point.
Gambar 2.6 Nilai Kp Besar
2.2.3.2.2 Kontrol Integratif
Kontroler proportional tidak akan mampu menjamin output
dari sistem akan menuju ke keadaan yang diinginkan kalau sebuah
8
9
plant tidak memiliki unsur integrator. Pada kontroler integral, respon
kepada sistem akan meningkat secara kontinu dan terus-menerus
kecuali nilai eror yang diintegralkan dengan batasan atas t dan batasan
bawah 0 (nol).
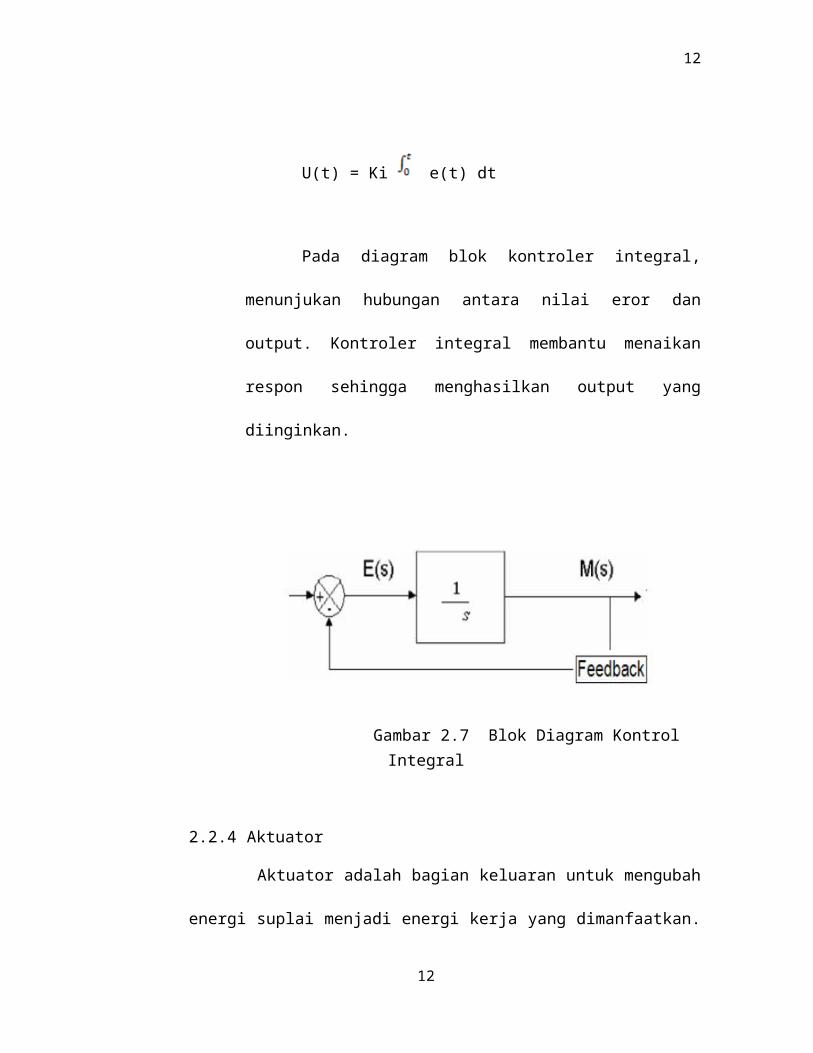
U(t) = Ki e(t) dt
Pada diagram blok kontroler integral, menunjukan hubungan
antara nilai eror dan output. Kontroler integral membantu menaikan
respon sehingga menghasilkan output yang diinginkan.
Gambar 2.7 Blok Diagram Kontrol Integral
2.2.4 Aktuator
Aktuator adalah bagian keluaran untuk mengubah energi suplai
menjadi energi kerja yang dimanfaatkan. Sinyal keluaran dikontrol oleh sistem
kontrol dan aktuator bertanggung jawab pada sinyal kontrol melalui elemen
9
10
kontrol terakhir. Jenis lain dari bagian keluara digunakan untuk mengindikasi
status kontrol sistem atau aktuator.
Actuator adalah elemen yang mengkonversikan besaran listrik analog
menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat
elektromekanik yang menghasilkan daya gerakan sehingga dapat menghasilkan
gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator dapat
dipasang sistem gearbox.
2.2.4.1 Motor Servo
Motor servo adalah sebuah motor dengan sistem closed
feedback dimana posisi dari motor akan diinformasikan kembali ke
rangkaian control yang ada di dalam motor servo.Motor ini terdiri dari
sebuah motor, serangkaian gear, potensiometer, dan rangkaian kontrol.
Motor servo biasa bergerak mencapai sudut tertentu saja dan tidak
kontinu seperti motor DC. Motor servo mempunyai torsi cukup
besar,biasa digunakan untuk aplikasi pergerakan lengan robot pada
mainan mobil remot kontrol dan lain sebagainya.
Motor servo memiliki beberapa keunggulan antara lain :
1. Output yang besar walaupun bentuknya kecil.
2. Memiliki encorder untuk member tahu apabila ada eror.
3. Efisiensi yang tinggi
10
11
4. Memiliki torsi yang besar.
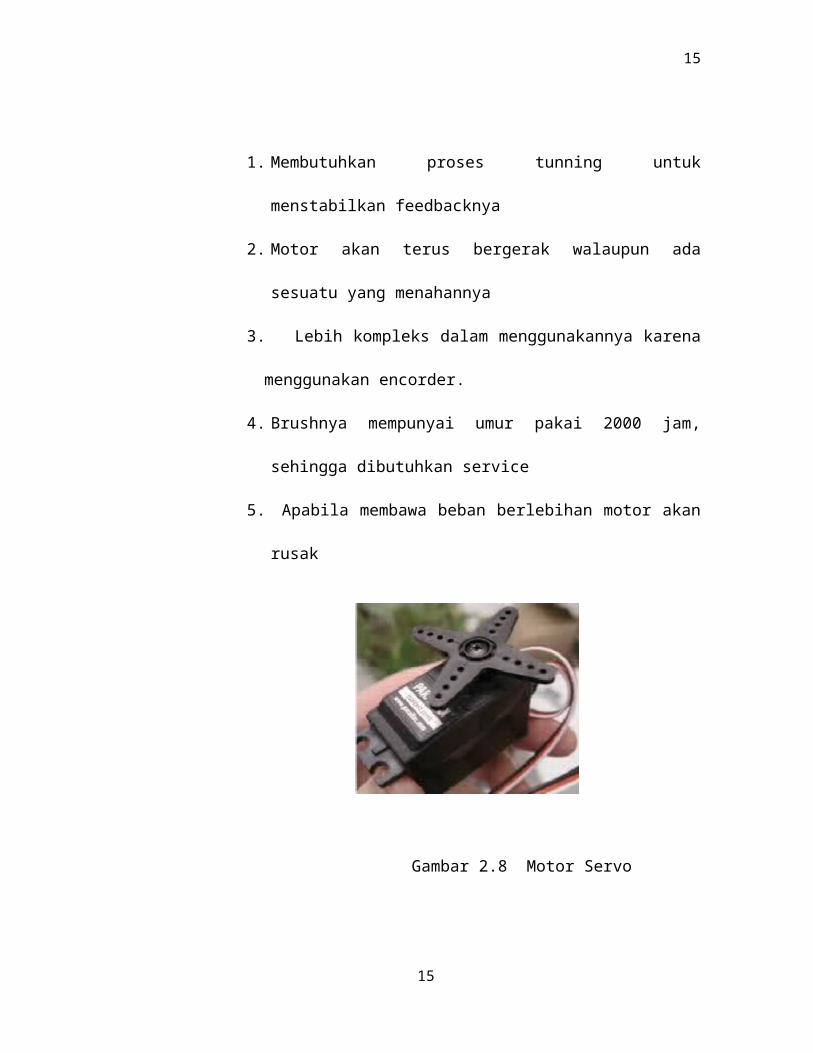
Selain itu motor servo juga beberapa kelemahan antara lain :
1. Membutuhkan proses tunning untuk menstabilkan feedbacknya
2. Motor akan terus bergerak walaupun ada sesuatu yang menahannya
3. Lebih kompleks dalam menggunakannya karena menggunakan
encorder.
4. Brushnya mempunyai umur pakai 2000 jam, sehingga dibutuhkan
service
5. Apabila membawa beban berlebihan motor akan rusak
Gambar 2.8 Motor Servo
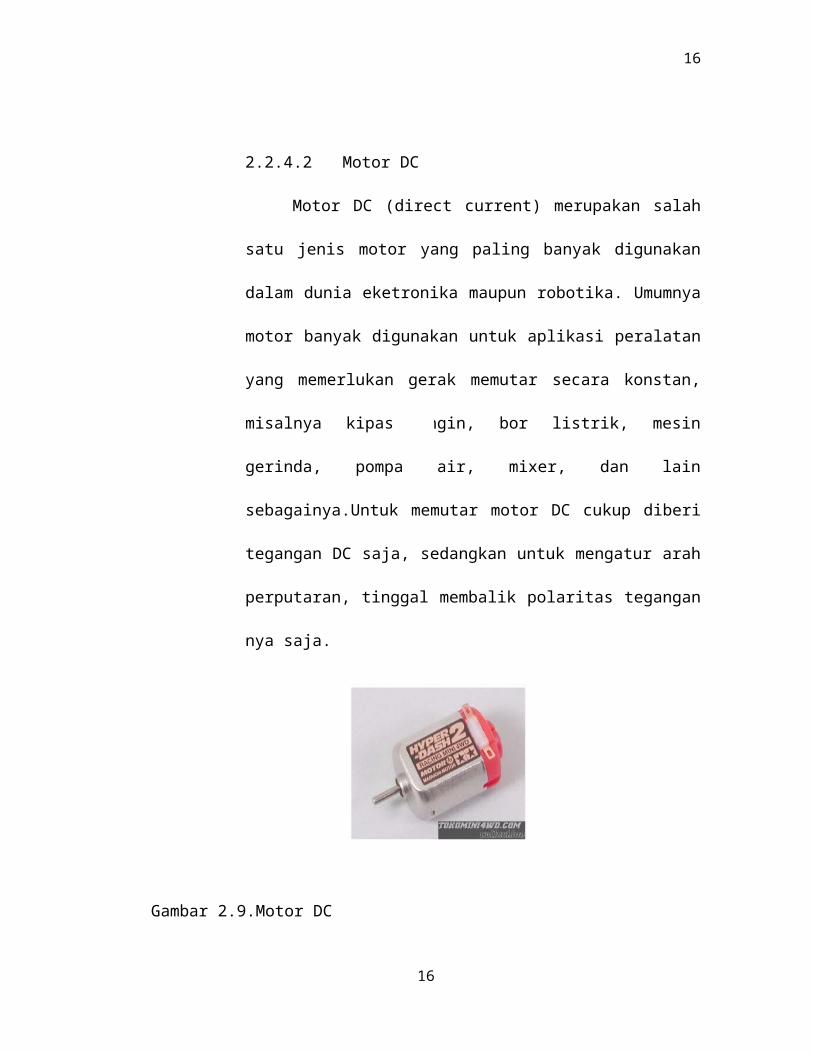
2.2.4.2 Motor DC
Motor DC (direct current) merupakan salah satu jenis motor
yang paling banyak digunakan dalam dunia eketronika maupun
robotika. Umumnya motor banyak digunakan untuk aplikasi peralatan
11
12
yang memerlukan gerak memutar secara konstan, misalnya kipas
angin, bor listrik, mesin gerinda, pompa air, mixer, dan lain
sebagainya.Untuk memutar motor DC cukup diberi tegangan DC saja,
sedangkan untuk mengatur arah perputaran, tinggal membalik polaritas
tegangan nya saja.
Gambar 2.9.Motor DC
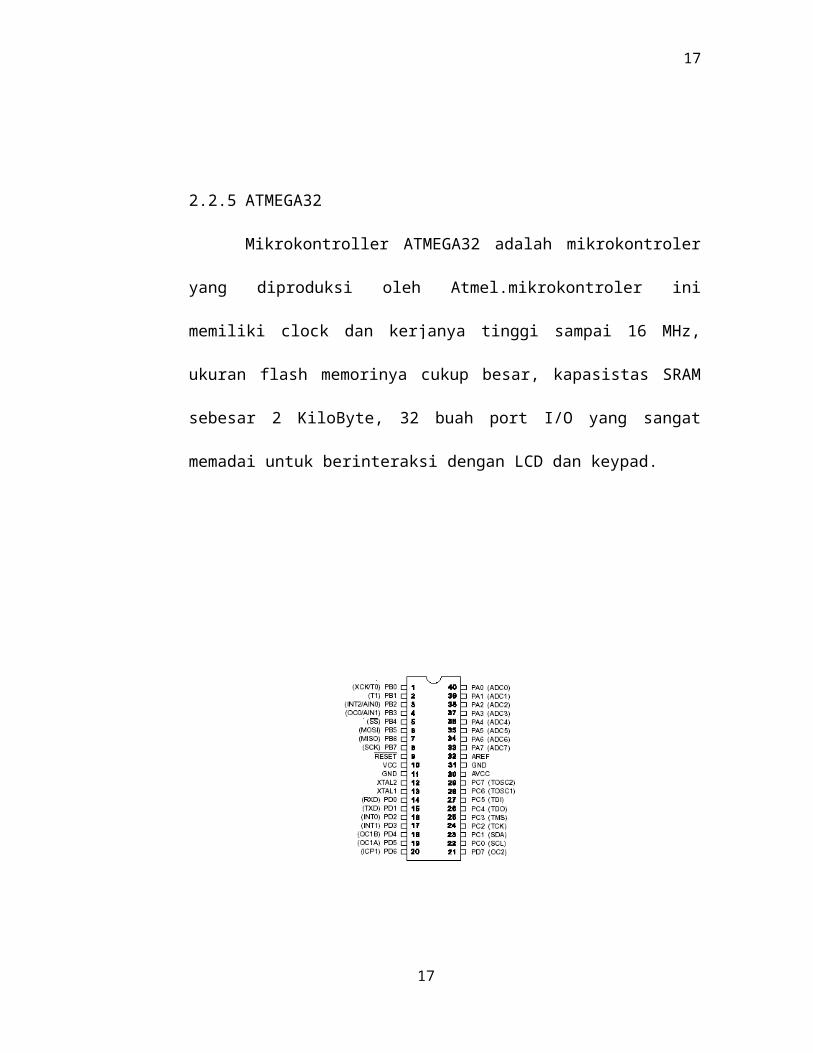
2.2.5 ATMEGA32
Mikrokontroller ATMEGA32 adalah mikrokontroler yang diproduksi
oleh Atmel.mikrokontroler ini memiliki clock dan kerjanya tinggi sampai 16
MHz, ukuran flash memorinya cukup besar, kapasistas SRAM sebesar 2
KiloByte, 32 buah port I/O yang sangat memadai untuk berinteraksi dengan
LCD dan keypad.
12
13
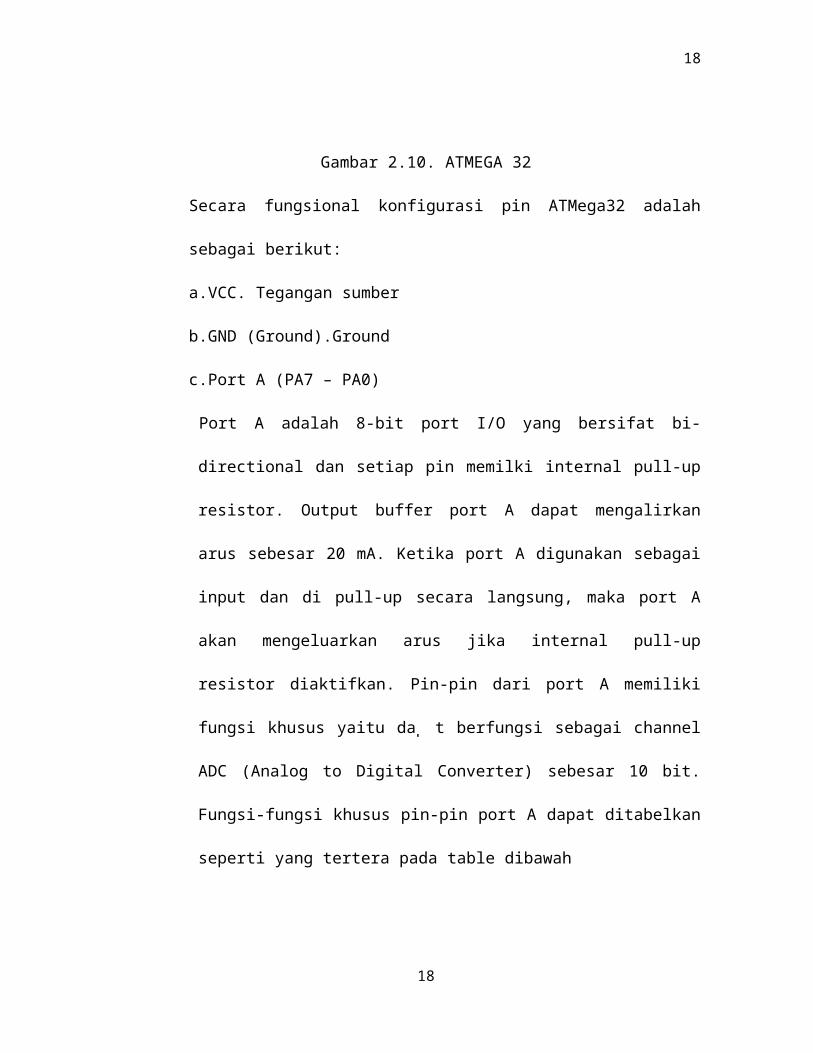
Gambar 2.10. ATMEGA 32
Secara fungsional konfigurasi pin ATMega32 adalah sebagai berikut:
a.VCC. Tegangan sumber
b.GND (Ground).Ground
c.Port A (PA7 – PA0)
Port A adalah 8-bit port I/O yang bersifat bi-directional dan setiap pin
memilki internal pull-up resistor. Output buffer port A dapat mengalirkan arus
sebesar 20 mA. Ketika port A digunakan sebagai input dan di pull-up secara
langsung, maka port A akan mengeluarkan arus jika internal pull-up resistor
diaktifkan. Pin-pin dari port A memiliki fungsi khusus yaitu dapat berfungsi
sebagai channel ADC (Analog to Digital Converter) sebesar 10 bit. Fungsi-
fungsi khusus pin-pin port A dapat ditabelkan seperti yang tertera pada table
dibawah
13
14
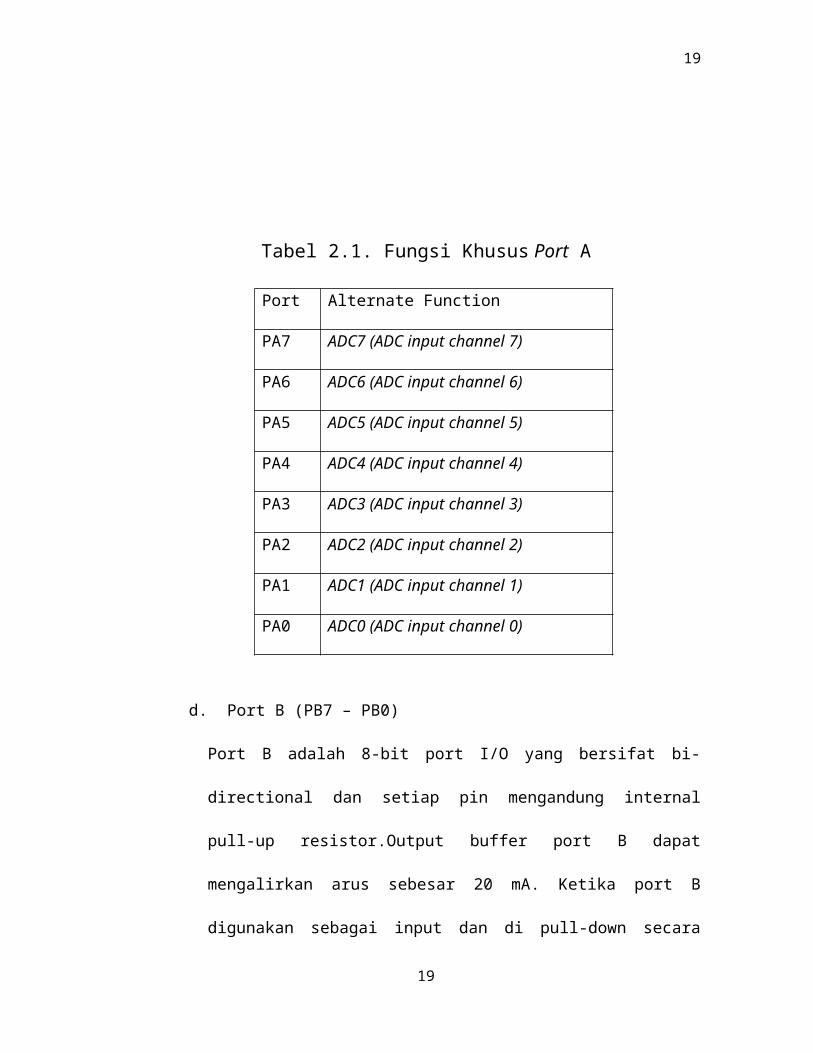
Tabel 2.1. Fungsi Khusus Port A
Port Alternate Function
PA7 ADC7 (ADC input channel 7)
PA6 ADC6 (ADC input channel 6)
PA5 ADC5 (ADC input channel 5)
PA4 ADC4 (ADC input channel 4)
PA3 ADC3 (ADC input channel 3)
PA2 ADC2 (ADC input channel 2)
PA1 ADC1 (ADC input channel 1)
PA0 ADC0 (ADC input channel 0)
d. Port B (PB7 – PB0)
Port B adalah 8-bit port I/O yang bersifat bi-directional dan setiap pin
mengandung internal pull-up resistor.Output buffer port B dapat
mengalirkan arus sebesar 20 mA. Ketika port B digunakan sebagai input dan
di pull-down secara external, port B akan mengalirkan arus jika internal pull-
up resistor diaktifkan.
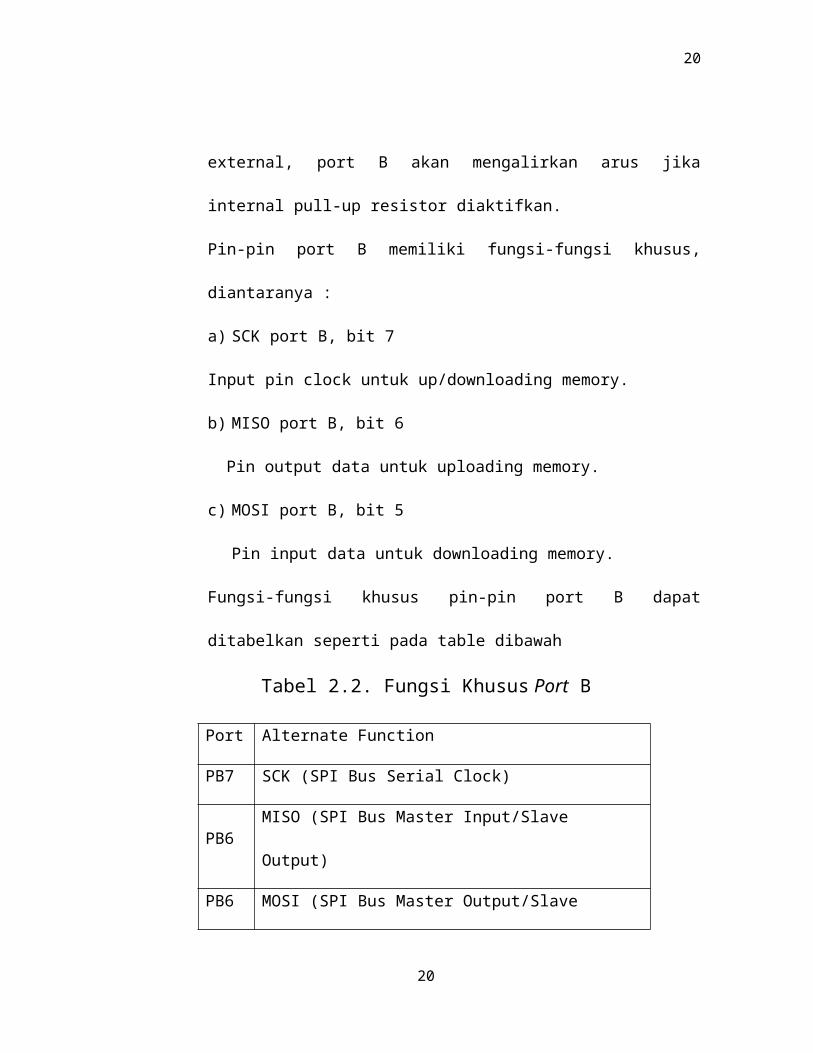
Pin-pin port B memiliki fungsi-fungsi khusus, diantaranya :
a) SCK port B, bit 7
Input pin clock untuk up/downloading memory.
b) MISO port B, bit 6
14
15
Pin output data untuk uploading memory.
c) MOSI port B, bit 5
Pin input data untuk downloading memory.
Fungsi-fungsi khusus pin-pin port B dapat ditabelkan seperti pada table
dibawah
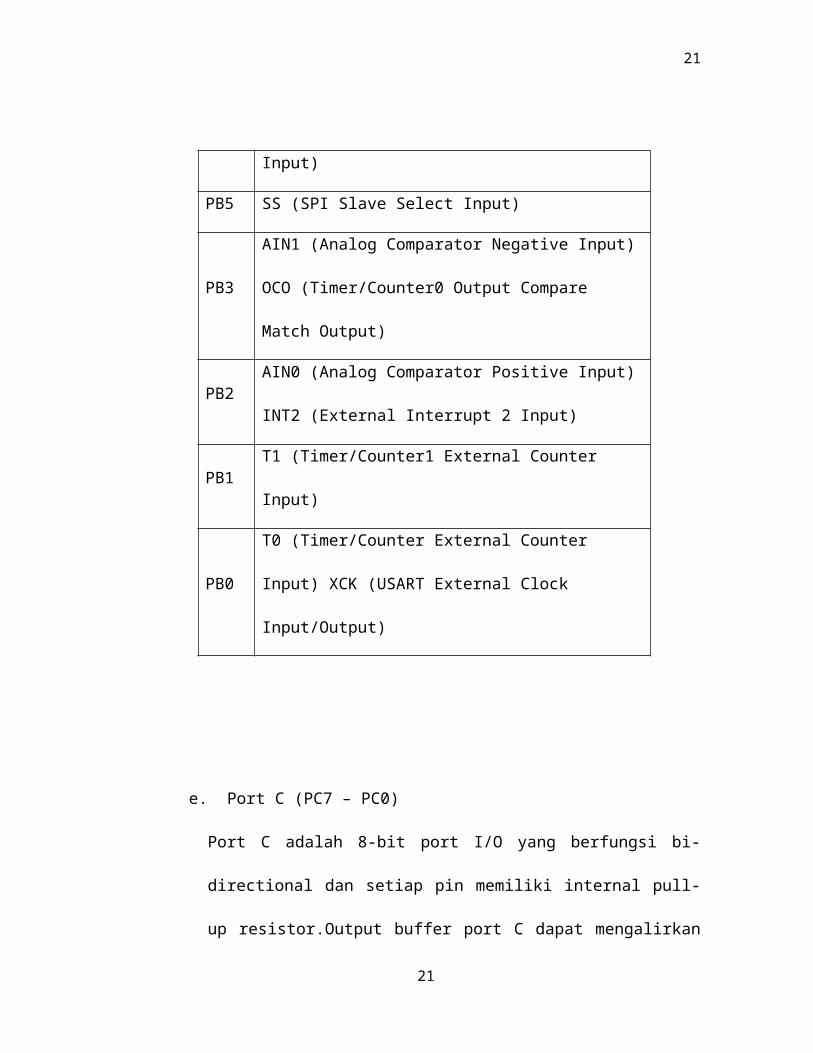
Tabel 2.2. Fungsi Khusus Port B
Port Alternate Function
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/Slave Output)
PB6 MOSI (SPI Bus Master Output/Slave Input)
PB5 SS (SPI Slave Select Input)
PB3AIN1 (Analog Comparator Negative Input)
OCO (Timer/Counter0 Output Compare Match Output)
PB2AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/Counter1 External Counter Input)
PB0T0 (Timer/Counter External Counter Input) XCK (USART
External Clock Input/Output)
15
16
e. Port C (PC7 – PC0)
Port C adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor.Output buffer port C dapat mengalirkan
arus sebesar 20 mA. Ketika port C digunakan sebagai input dan di pull-down
secara langsung, maka port C akan mengeluarkan arus jika internal pull-up
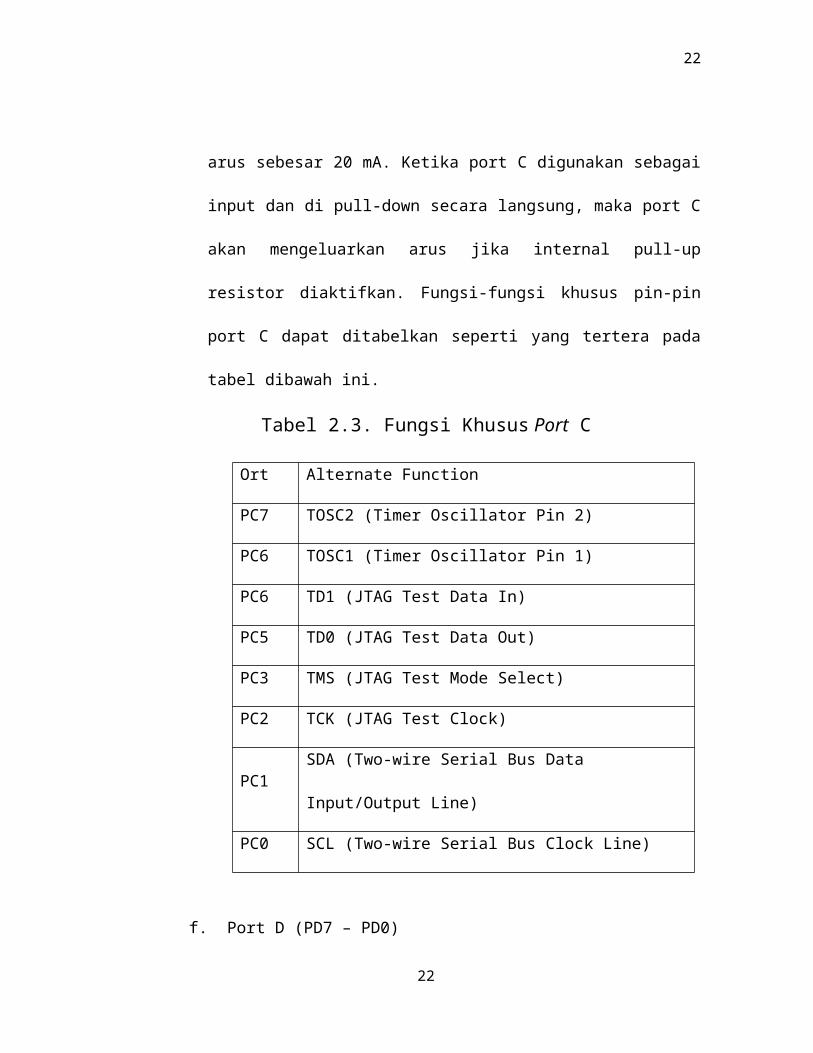
resistor diaktifkan. Fungsi-fungsi khusus pin-pin port C dapat ditabelkan
seperti yang tertera pada tabel dibawah ini.
Tabel 2.3. Fungsi Khusus Port C
Ort Alternate Function
PC7 TOSC2 (Timer Oscillator Pin 2)
PC6 TOSC1 (Timer Oscillator Pin 1)
PC6 TD1 (JTAG Test Data In)
PC5 TD0 (JTAG Test Data Out)
PC3 TMS (JTAG Test Mode Select)
PC2 TCK (JTAG Test Clock)
PC1 SDA (Two-wire Serial Bus Data Input/Output Line)
PC0 SCL (Two-wire Serial Bus Clock Line)
f. Port D (PD7 – PD0)
Port D adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor.Output buffer port D dapat mengalirkan
16
17
arus sebesar 20 mA. Ketika port D digunakan sebagai input dan di pull-down
secara langsung, maka port D akan mengeluarkan arus jika internal pull-up
resistor diaktifkan. Fungsi-fungsi khusus pin-pin port D dapat ditabelkan
seperti yang tertera pada tabel dibawah ini.
Tabel 2.4 Fungsi Khusus Port D
Port Alternate Function
PD7 OC2 (Timer / Counter2 Output Compare Match Output)
PD6 ICP1 (Timer/Counter1 Input Capture Pin)
PD6 OCIB (Timer/Counter1 Output Compare B Match Output)
PD5 TD0 (JTAG Test Data Out)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
2.2.6 Sensor
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya
perubahan lingkungan fisik atau kimia. Variabel keluaran dari sensor yang
diubah menjadi besaran listrik disebut Transduser. Pada saat ini, sensor tersebut
telah dibuat dengan ukuran sangat kecil dengan orde nanometer. Ukuran yang
sangat kecil ini sangat memudahkan pemakaian dan menghemat energi.
17
18
Gambar 2.11. Sensor
2.2.6.1 Sensor Ultrasonik
Sensor Ultrasonik adalah alat elektronika yang kemampuannya
bisa mengubah dari energy listrik menjadi energy mekanik dalam
bentuk gelombang suara ultrasonic. Sensor ini terdiri dari rangkaian
pemancar Ultrasonic yang dinamakan transmitter dan penerima
ultrasonic yang disebut receiver. Alat ini digunakan untuk mengukur
gelombang ultrasonic. Gelombang ultrasonic adalah gelombang
mekanik yang memiliki cirri-ciri longitudinal dan biasanya memiliki
frekuensi di atas 20 Khz. Gelombong Utrasonic dapat merambat
melalui zat padat, cair maupun gas. Gelombang Ultrasonic adalah
gelombang rambatan energi dan momentum mekanik sehingga
merambat melalui ketiga element tersebut sebagai interaksi dengan
molekul dan sifat enersia medium yang dilaluinya.
18
19
Gambar 2.11.Sensor Ultra Sonic
Gambar 2.12.Sensor Ultra Sonic
2.2.6.2 Sensor Photodiode
Photodioda adalah sebuah dioda yang dioptimasi untuk
menghasilkan aliran elektron (atau arus listrik) sebagai respon apabila
terpapar oleh sinar ultraviolet, cahaya tampak, atau cahaya infra
merah. Kebanyakan photodioda dibuat dari silikon, tetapi ada juga
yang dibuat dari germanium dan galium arsenida. Daerah sambungan
semikonduktor tipe P dan N tempat cahaya masuk harus tipis sehingga
cahaya bisa masuk ke daerah aktifnya (active region) atau daerah
pemisahnya (depletion region) tempat dimana cahaya diubah menjadi
pasangan elektron dan hole.
Gambar 2.13.Photodioda
19
20
2.2.7 Driver Motor
Driver motor merupakan salah satu perangkat umum yang digunakan
untuk kendali motor DC. Driver motor ini yang nantinya bertugas
mengendalikan arah putaran maupun kecepatan motor DC yang akan
dikendalikan Driver motor ada yang berupa IC, beberapa diantaranya adalah
L298, L293D, LMD18200, dll. Pada dasarnya IC driver motor merupakan
bentukan dari rangkaian H-Bridge baik itu H-Bridge transistor ataupun H-
Bridge mosfet. L298 dan L293D merupakan contoh IC driver motor dengan
transistor, sedangkan LMD18200 merupakan IC driver motor dengan mosfet.
Kita dapat membuat rangkaian H-Bridge sendiri untuk driver motor,
2.2.7.1 IC L298
IC L298 adalah jenis IC driver motor yang dapat
mengendalikan arah putaran dan kecepatan motor DC ataupun Motor
stepper. Mampu mengeluarkan output tegangan untuk Motor dc dan
motor stepper sebesar 50 volt. IC l298 terdiri dari transistor-transistor
logik (TTL) dengan gerbang nand yang memudahkan dalam
menentukkan arah putaran suatu motor dc dan motor stepper. Dapat
mengendalikan 2 untuk motor dc namun pada hanya dapat
mengendalikan 1 motor stepper. Penggunaannya paling sering untuk
robot line follower. Bentuknya yang kecil memungkinkan dapat
meminimalkan pembuatan robot line follower
20
21
Gambar 2.14.IC L298
21
22
2.3 Kerangka Pikir
Gambar 2.12.Kerangka Pikir
22
PROBLEM
Kurangnya kemampuan manusia dalam hal mengangkut dan memindahkan suatu benda
yang berat
APPROACH
Mikrokontroler,Motor DC,Motor Servo
DEVELOPMENT
Robot Line Follower Berlengan.
IMPLEMENTASI
Bidang Industri/Pabrik
MEASURMENT
Melakukan uji coba robot line follower berlengan dengan menggunakan algoritma kontrol PI
(pada blok ini yang dimaksud dengan pengukurannya adalah bagaimana metode pengukurnya dan apa yang digunakan dalam pengukuran
tersebut)
RESULT
Robot Line Follower Berlengan yang dapat berjalan mengikuti garis serta mendeteksi objek/barang dan mengangkut objek/barang.
Top Related
Copyright © 2022 FDOKUMEN

