





Bahasa
Halaman
Hukum


16 Universitas Kristen Petra
3. TEORI BALOK TIMOSHENKO
3.1.Asumsi Dasar Teori Balok Timoshenko
Sebelum adanya teori balok Timoshenko, terlebih dahulu dikenal teori
balok Euler-Bernoulli, Rayleigh, dan shear. Teori balok Euler-Bernoulli
merupakan teori yang paling pertama ditemukan diantara keempat teori ini, karena
itu seringkali teori ini dikenal dengan nama teori balok klasik. Teori ini memiliki
asumsi dasar yang cukup mudah dipahami, dimana setelah terjadi lendutan (akibat
gaya luar ataupun berat sendiri), bidang datar pada penampang balok yang berarah
normal pada garis netralnya tetaplah merupakan suatu bidang datar yang berarah
normal terhadap garis netralnya. Dalam asumsi balok Euler-Bernoulli, bidang
datar penampang dapat berarah normal terhadap garis netralnya karena regangan
geser (γxz) diasumsikan dapat diabaikan sehingga nilainya dianggap nol, sehingga
θ dianggap sama dengan dx
dw. Hal ini terjadi karena lendutan yang terjadi
dianggap lebih dominan diakibatkan karena momen lentur yang besar. Hal ini
memang benar untuk balok yang tipis dan panjang dimana perbandingan antara
panjang dan tinggi balok besar. Namun hal tersebut tidak berlaku untuk balok
tinggi ataupun balok yang perbandingan antara panjang dan tingginya kecil,
dimana lendutan yang terjadi lebih dominan disebabkan oleh gaya geser. Dalam
beberapa kasus seperti ini, maka tentunya teori Euler-Bernoulli kurang tepat.
Teori Euler-Bernoulli juga menghasilkan nilai estimasi frekwensi getar alami
balok yang berlebihan.
Teori balok Rayleigh, menambahkan pengaruh inersia rotasi dalam teori
Euler-Bernoulli, maka sebagian masalah hasil frekwensi getar alami balok yang
diestimasi secara berlebih dapat diatasi. Namun hasilnya tetap diestimasi secara
berlebihan. Teori balok shear mengikutsertakan deformasi geser pada teori balok
Euler-Bernoulli. Dengan ini, maka hasil frekwensi getar alami yang dihasilkan
menjadi lebih masuk akal.
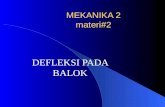
Adapun teori balok Timoshenko mengikutsertakan deformasi geser dan
inersia rotasi. Sehingga asumsi dasar untuk balok Timoshenko adalah bahwa
bidang datar tetap datar setelah mengalami lendutan tetapi tidak perlu berarah

17 Universitas Kristen Petra
normal terhadap garis netralnya (Reddy, 2006). Oleh karena itu maka regangan
geser (γxz) dalam balok Timoshenko juga diperhitungkan, dan membuat teori
balok Timoshenko lebih umum, sehingga dapat digunakan untuk semua jenis
balok. Untuk lebih jelasnya, dapat dilihat pada gambar 3.1. Karena teori balok
Timoshenko juga memperhitungkan adanya inersia rotasi, teori ini dipakai banyak
ahli untuk menghitung frekwensi getar alami. Perbandingan yang lebih jelas
antara kedua teori ini dapat dilihat pada tabel 3.1.
Gambar 3.1. Teori balok Timoshenko di mana sebelum deformasi arah bidang
penampangnya tidak harus tetap berarah normal terhadap garis
netral penampang.
Tabel 3.1. Perbandingan antara teori balok Euler-Bernoulli, Rayleigh, Shear, dan
Timoshenko
Teori Balok Momen
Lentur
Perpindahan
Lateral
Deformasi
Geser
Inersia
Rotasi
Euler-Bernoulli √ √ × ×
Rayleigh √ √ × √
Shear √ √ √ ×
Timoshenko √ √ √ √
Sumber: Han et al. (1999)
Dalam teori balok Timoshenko, diasumsikan regangan geser yang terjadi
terdistribusi secara linier sepanjang penampang balok, padahal sebenarnya tidak.

18 Universitas Kristen Petra
Hal ini terjadi karena distribusi tegangan geser (τ) dan regangan geser (γ) yang
terjadi distribusinya adalah kubik, dan oleh karena itu, perlu ada koefisien yang
menyesuaikan bentuk distribusi tegangan geser dan regangan geser tersebut sesuai
dengan penampangnya. Maka pada teori balok Timoshenko, parameter penting
yang digunakan adalah shape factor atau shear correction factor (Han et al.,
1999). Parameter shape factor adalah fungsi yang dibentuk dari Poisson’s ratio
dan frekuensi getaran pada sepanjang balok, yang nilainya tergantung dari
Poisson’s ratio dan bentuk penampang balok. Dengan adanya shape factor maka
hasil analisa balok Timoshenko akan semakin akurat, terutama untuk analisa
dinamis balok. Menurut Han et al. (1999), pada teori balok Euler-Bernoulli,
penyimpangan analisis dinamis terhadap solusi eksaknya tidak terlalu besar untuk
frekuensi getar alami tingkat rendah, namun terjadi penyimpangan yang sangat
besar untuk frekuensi getar alami tingkat tinggi. Hal ini terlihat jelas dalam tabel
3.2. Maka, untuk analisa dinamis sebaiknya digunakan balok Timoshenko.
Tabel 3.2. Persentase penyimpangan frekuensi getar alami pada teori balok Euler-
Bernoulli dan teori balok Timoshenko
Teori Balok Frekuensi Getar Alami
Tingkat Pertama
Frekuensi Getar Alami
Tingkat Kedua
Euler-Bernoulli +14% sampai +26% +78% sampai +133%
Timoshenko -1% sampai +2% -1% sampai +6%
Sumber: Han et al. (1999), dikutip dari Traill-Nash & Collar (1953)
Catatan: Hasil-hasil ini dibandingkan terhadap nilai eksperimen untuk kondisi
balok tidak langsing di mana pengaruh gaya geser dan rotasi sangat penting.
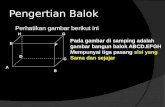
3.2. Persamaan Gerak untuk Balok Timoshenko
Pada gambar 3.2 terlihat sebuah balok Timoshenko. Dalam teori balok
Timoshenko, terdapat 2 derajat kebebasan, yaitu lendutan (w) dan rotasi (θ).

19 Universitas Kristen Petra
Gambar 3.2. Balok Timoshenko yang memiliki 2 derajat kebebasan yaitu w dan
θ.
Menurut Kosmatka (1995) untuk balok satu dimensi besarnya perpindahan
(displacement) untuk arah x dan z (arah y bernilai tidak ditinjau) dapat ditulis:
),( txzu (3.1a)
),( txww (3.1b)
di mana: w = perpindahan transversal dari sumbu netral pada waktu t.
= rotasi dari penampang balok pada waktu t.
Komponen regangan yang tidak nol ditentukan berdasarkan persamaan (3.1a) dan
(3.1b) sebagai berikut:
x
zdx
dwxx
(3.2a)
x
w
dz
du
dx
dwxz
(3.2b)
di mana: εxx = regangan akibat momen lentur.
γxz = regangan akibat gaya geser.
Adapun x
adalah kurvatur (κ), sehingga persamaan (3.2a) juga dapat ditulis
menjadi εxx = -z κ.
Persamaan gerak untuk balok Timoshenko dapat diturunkan dari prinsip
Hamilton:
𝛿Π = ∫ (𝛿𝑈 + 𝛿𝑉𝐴 − 𝛿𝑇 − 𝛿𝑊𝑒) 𝑑𝑡 = 0𝑡2
𝑡1 (3.3)
di mana U = variasi energi regangan (strain energy);

20 Universitas Kristen Petra
δVA = variasi energi potensial terkait dengan tegangan awal;
T = variasi energi kinetik; dan
eW = variasi kerja dari gaya luar.
Untuk energi regangan (strain energy) besar nilainya dirumuskan sebagai:
𝑈 =1
2∫ {𝜎}𝑇{휀} 𝑑𝑉𝑉
𝑈 =1
2∫ ∫ {𝜎}𝑇{휀} 𝑑𝐴
𝐴
𝐿
0 𝑑𝑥 (3.4a)
di mana L = panjang balok;
A = luas penampang balok;
{𝜎} = tegangan pada balok = {𝐸휀𝑥𝑥
𝑘𝐺𝛾𝑥𝑧}
{휀} = regangan pada balok.= {휀𝑥𝑥
𝛾𝑥𝑧}
Dari persamaan (3.2a) dan (3.2b) perumusan strain energy dapat diturunkan:
𝑈 =1
2∫ ∫ {𝜎}𝑇{휀} 𝑑𝐴
𝐴
𝐿
0 𝑑𝑥
𝑈 =1
2∫ ∫ [𝐸 휀2 + 𝐺 𝑘 𝛾2] 𝑑𝐴
𝐴
𝐿
0 𝑑𝑥 𝑈 =
1
2∫ ∫ 𝐸 휀2 𝑑𝐴
𝐴
𝐿
0 𝑑𝑥 +
1
2∫ ∫ 𝐺 𝑘 𝛾2 𝑑𝐴
𝐴
𝐿
0 𝑑𝑥
Dari sini, persamaan dibagi menjadi bagian kiri dan bagian kanan. Terlebih
dahulu disederhanakan persamaan bagian kiri.
𝑈 =1
2∫ ∫ 𝐸 휀2 𝑑𝐴
𝐴
𝐿
0𝑑𝑥
𝑈 =1
2∫ ∫ 𝐸 𝑧2 (
𝑑𝜃
𝑑𝑥)2
𝑑𝐴𝐴
𝐿
0𝑑𝑥
Oleh karena nilai E dan (𝑑𝜃
𝑑𝑥) akan tetap konstan sepanjang penampang balok,
maka kedua variabel ini dapat dikeluarkan dari integral. Persamaan ini menjadi :
𝑈 =1
2∫ 𝐸 (
𝑑𝜃
𝑑𝑥)2
∫ 𝑧2 𝑑𝐴𝐴
𝐿
0𝑑𝑥
Sebagaimana kita tahu, ∫ 𝑧2 𝑑𝐴𝐴
adalah momen inersia dari penampang balok
tersebut, maka persamaan di atas dapat ditulis menjadi :
𝑈 =1
2∫ 𝐸𝐼 (
𝑑𝜃
𝑑𝑥)2𝐿
0𝑑𝑥

21 Universitas Kristen Petra
Untuk persamaan bagian kanan dengan mudah nilai γ disubstitusi dengan (𝑑𝑤
𝑑𝑥−
𝜃), sehingga apabila persamaan bagian kiri dan bagian kanan digabung dapat
menjadi:
𝑈 =1
2∫ 𝐸𝐼 (
𝑑𝜃
𝑑𝑥)2
𝑑𝑥𝐿
0+
1
2∫ 𝑘𝐺𝐴 (
𝑑𝑤
𝑑𝑥− 𝜃)
2
𝑑𝑥𝐿
0 (3.4b)
di mana E = modulus Young,
G = modulus geser dari material balok,
I = momen inersia penampang, dan
k = koefisien geser yang bergantung kepada jenis material dan
bentuk penampang.
Variasi dari energi regangan (strain energy) menjadi:
𝛿𝑈 = ∫ 𝐸𝐼 (𝑑𝜃
𝑑𝑥) (
𝑑(𝛿𝜃)
𝑑𝑥)𝑑𝑥
𝐿
0+ ∫ 𝑘𝐺𝐴 (
𝑑𝑤
𝑑𝑥− 𝜃) (
𝑑(𝛿𝑤)
𝑑𝑥− 𝛿𝜃) 𝑑𝑥
𝐿
0 (3.4c)
Perumusan untuk energi potensial balok dapat dituliskan sebagai:
𝑉𝐴 =𝑃
2∫ (
𝑑𝑤
𝑑𝑥)2𝐿
0 𝑑𝑥 (3.5a)
di mana P = gaya aksial tarik pada balok.
Variasi energi potensial balok menjadi:
𝛿𝑉𝐴 = 𝑃 ∫ (𝑑𝑤
𝑑𝑥) (
𝑑(𝛿𝑤)
𝑑𝑥)
𝐿
0 𝑑𝑥 (3.5b)
Perumusan untuk energi kinetik balok dapat dituliskan sebagai:
𝑇 =1
2∫ ∫ 𝜌 ((
𝑑𝑢
𝑑𝑡)2
+ (𝑑𝑣
𝑑𝑡)2
+ (𝑑𝑤
𝑑𝑡)2
) 𝑑𝐴𝐴
𝐿
0 𝑑𝑥 (3.6a)
Dari persamaan (3.1a) dan (3.1b) persamaan energi kinetik balok dapat ditulis
menjadi:
𝑇 =1
2∫ 𝜌𝐴 (
𝑑𝑤
𝑑𝑡)2
𝑑𝑥𝐿
0+
1
2∫ 𝜌𝐼 (
𝑑𝜃
𝑑𝑡)2
𝑑𝑥𝐿
0 (3.6b)
di mana = massa jenis.
Variasi dari energi kinetik menjadi:
𝛿𝑇 = ∫ 𝜌𝐴 (𝑑𝑤
𝑑𝑡) (
𝑑(𝛿𝑤)
𝑑𝑡) 𝑑𝑥
𝐿
0+ ∫ 𝜌𝐼 (
𝑑𝜃
𝑑𝑡) (
𝑑(𝛿𝜃)
𝑑𝑡) 𝑑𝑥
𝐿
0 (3.6c)
Untuk kerja akibat gaya luar perrumusannya adalah:
𝑊 = ∫ 𝑤 𝑞 𝑑𝑥𝐿
0+ ∫ 𝜃 𝑚 𝑑𝑥
𝐿
0 (3.7a)

22 Universitas Kristen Petra
di mana q = beban merata, dan
m = momen di sepanjang balok.
Variasi kerja yang dilakukan oleh gaya luar menjadi:
𝛿𝑊 = ∫ 𝛿𝑤 𝑞 𝑑𝑥𝐿
0+ ∫ 𝛿𝜃 𝑚 𝑑𝑥
𝐿
0 (3.7b)
Dari beberapa persamaan di atas (persamaan (3.4c), (3.5b), (3.6c), dan (3.7b),
apabila di substitusikan ke dalam persamaan (3.3), maka didapatkan persamaan
bentuk lemah (weak form) sebagai berikut:
∫ 𝛿𝜃,𝑥 𝐸𝐼 𝜃,𝑥 𝑑𝑥 +𝐿
0∫ (𝛿𝑤,𝑥− 𝛿𝜃)𝑘𝐺𝐴(𝑤,𝑥− 𝜃)𝑑𝑥
𝐿
0+ 𝑃 ∫ 𝑤,𝑥 𝛿𝑤,𝑥 𝑑𝑥
𝐿
0+
∫ 𝛿𝑤𝜌𝐴�̈� 𝑑𝑥𝐿
0+ ∫ 𝛿𝜃𝜌𝐼�̈� 𝑑𝑥
𝐿
0= ∫ 𝛿𝑤 𝑞 𝑑𝑥
𝐿
0+ ∫ 𝛿𝜃 𝑚 𝑑𝑥
𝐿
0 (3.8a)
Tanda koma melambangkan turunan terhadap variabel disebelah kanannya, dan
tanda double dot melambangkan turunan kedua terhadap waktu. Persamaan
bentuk lemah ini kemudian diintegrasikan secara parsial sehingga diperoleh
sistem persamaan diferensial parsial, sebagai berikut:
𝜕
𝜕𝑥(𝑘𝐺𝐴 (
𝜕𝑤
𝜕𝑥− 𝜃)) + 𝑃 (
𝜕𝑤
𝜕𝑥) + 𝑞 = 𝜌𝐴
𝜕2𝑤
𝜕𝑡2 (3.8b)
𝜕
𝜕𝑥(𝐸𝐼
𝜕𝜃
𝜕𝑥) + 𝑘𝐺𝐴 (
𝜕𝑤
𝜕𝑥− 𝜃) + 𝑚 = 𝜌𝐼
𝜕2𝜃
𝜕𝑡2 (3.8c)
Gaya geser dan momen lentur dirumuskan sebagai berikut:
𝑄 = 𝑘𝐺𝐴 (𝜕𝑤
𝜕𝑥− 𝜃) + 𝑃 (
𝜕𝑤
𝜕𝑥) (3.9a)
𝑀 = 𝐸𝐼 (𝜕𝜃
𝜕𝑥) (3.9b)
3.3. Perumusan Balok Timoshenko untuk Metode Elemen Hingga
Persamaan – persamaan diatas merupakan persamaan balok apabila
perhitungan dilakukan secara analitis. Untuk melakukan perhitungan numerik
dengan metode elemen hingga, diperlukan persamaan yang dapat dengan mudah
diselesaikan secara numerik. Persamaan dinamis balok dapat ditulis sebagai
berikut:
[𝑀]{�̈�(𝑡)} + [𝐶]{�̇�(𝑡)} + [[𝐾] + 𝑃[𝐾𝑔]] {𝐷(𝑡)} = {𝐹(𝑡)}
di mana [M] = matriks massa struktur,
{�̈�(𝑡)} = matriks percepatan struktur terhadap waktu,
[C] = matriks redaman struktur,

23 Universitas Kristen Petra
{�̇�(𝑡)} = matriks kecepatan struktur terhadap waktu,
[K] = matriks kekakuan struktur,
[Kg] = matriks kekakuan geometris struktur,
P = gaya aksial tarik,
{D(t)} = matriks perpindahan struktur terhadap waktu, dan
{F(t)} = matriks gaya yang bekerja terhadap waktu.
Oleh karena penelitian dibatasi hanya untuk analisa getaran bebas, maka nilai
koefisien redaman C dianggap nol. Dengan demikian, persamaan diatas dapat
ditulis menjadi:
[𝑀]{�̈�(𝑡} + [[𝐾] + 𝑃[𝐾𝑔]] {𝐷(𝑡)} = {𝐹(𝑡)} (3.10)
Menurut Kosmatka (1995), matriks massa, kekakuan, kekakuan geometris, dan
gaya konsisten yang bekerja pada struktur dapat ditulis menjadi:
[𝑀] = ∫ [𝑁𝑤]𝑇𝜌𝐴[𝑁𝑤]𝑑𝑥𝐿
0+ ∫ [𝑁𝜃]𝑇𝜌𝐼[𝑁𝜃]𝑑𝑥
𝐿
0 (3.11)
[𝐾] = ∫ [𝜕 𝜕𝑥⁄ [𝑁𝜃]]𝑇
𝐸𝐼 [𝜕 𝜕𝑥⁄ [𝑁𝜃]]𝐿
0+
∫ [𝜕 𝜕𝑥⁄ [𝑁𝑤] − [𝑁𝜃]]𝑇
𝑘𝐺𝐴𝜕𝜕𝑥⁄ [𝜕 𝜕𝑥⁄ [𝑁𝑤] − [𝑁𝜃]] 𝑑𝑥
𝐿
0
(3.12)
[𝐾𝑔] = ∫ [𝜕 𝜕𝑥⁄ [𝑁𝑤]]𝑇
[𝜕 𝜕𝑥⁄ [𝑁𝑤]] 𝑑𝑥𝐿
0 (3.13)
{𝐹} = ∫ [𝑁𝑤]𝑇𝑞 𝑑𝑥 + [𝑁𝜃]𝑇𝑚 𝑑𝑥𝐿
0 (3.14)
di mana [Nw] = matriks shape function perpindahan vertikal, dan
[Nθ] = matriks shape function perpindahan rotasi.
Untuk analisa statis dan stabilitas, percepatan struktur dianggap nol, sehingga
persamaannya menjadi:
[[𝐾] + 𝑃[𝐾𝑔]] {𝐷} = {𝐹}
Untuk analisa statis, gaya aksial yang terjadi pada balok dianggap nol, sehingga
menghasilkan persamaan sebagai berikut:
[𝐾]{𝐷} = {𝐹} (3.15)
Untuk analisa stabilitas, dalam mencari gaya aksial kritis yang membuat
terjadinya tekuk pada balok (Pcr), dianggap gaya luar yang bekerja pada balok
sama dengan nol, sehingga terbentuk persamaan eigen sebagai berikut:

24 Universitas Kristen Petra
[[𝐾] − 𝑃[𝐾𝑔]] {𝐷} = {0} (3.16)
Dimana nilai Pcr didapatkan dari nilai eigen value positif terkecil, dan nilai eigen
vector yang bersangkutan adalah perpindahan balok setelah berdeformasi akibat
tekuk. Untuk analisa getaran bebas, gaya luar yang bekerja pada balok dianggap
nol, sehingga persamaannya dapat ditulis sebagai berikut:
[𝑀]{�̈�(𝑡)} + [𝐾]{𝐷(𝑡)} = 0 (3.17)
Gerakan sebuah struktur dengan frekwensi getar alami 𝜔 dapat dinyatakan
sebagai:
{𝐷(𝑡)} = {𝐷0} sin(𝜔𝑡 + 𝜑) (3.18a)
Apabila persamaan (3.18a) diturunkan terhadap waktu sebanyak dua kali, akan
menghasilkan persamaan sebagai berikut:
{�̈�(𝑡)} = −𝜔2{𝐷0} sin(𝜔𝑡 + 𝜑) = −𝜔2{𝐷(𝑡)} (3.18b)
Substitusi dari persamaan (3.18b) ke persamaan (3.17) dapat dituliskan menjadi:
−𝜔2[𝑀]{𝐷0} sin(𝜔𝑡 + 𝜑) + [𝐾]{𝐷0} sin(𝜔𝑡 + 𝜑) = {0} (3.19)
Persamaan (3.14) adalah persamaan gerak untuk menganalisa getaran bebas pada
suatu struktur dengan banyak derajat kebebasan tanpa redaman (undamped multi
degree of freedom system). Apabila diasumsikan nilai sin(𝜔𝑡 + 𝜑) ≠ 0, dan
persamaan diatas diubah menjadi permasalahan eigen, maka persamaan tersebut
menjadi sebagai berikut :
([𝐾] − 𝜔2[𝑀]){𝐷0} = {0} (3.20)
di mana: 𝜔2 = eigen value
{𝐷0} = eigen vector
Penyelesaian dari persamaan eigen di atas menghasilkan nilai-nilai eigen 𝜔2 dan
vektor-vektor eigen {𝐷0}, dimana 𝜔2 adalah kuadrat dari frekwensi getar alami
struktur, dan {𝐷0} adalah bentuk ragam (mode shape) getaran.
3.4. Perumusan Balok Timoshenko untuk Metode Elemen Hingga berbasis
Kriging
Sebuah balok Timoshenko dibagi menjadi beberapa elemen, dan ditinjau
suatu elemen dalam DOI seperti pada gambar 3.3. Fungsi perpindahan dari balok
tersebut dapat ditulis menjadi

25 Universitas Kristen Petra
𝑤 = [𝑁𝑤]{𝐷} (3.21a)
𝜃 = [𝑁𝜃]{𝐷} (3.21b)
di mana:
[𝑁𝑤] = {𝑁1 0 𝑁2 0 ⋯ 𝑁𝑛 0} (3.21c)
[𝑁𝜃] = {0 𝑁1 0 𝑁2 ⋯ 0 𝑁𝑛} (3.21d)
{𝐷} = {𝑤1 𝜃1 𝑤2 𝜃2 ⋯ 𝑤𝑛 𝜃𝑛}T (3.21e)
Adapun shape function (N1, N2, …., Nn) yang digunakan dalam penelitian ini
adalah shape function Kriging seperti dalam persamaan (2.8) pada bab
sebelumnya.
Gambar 3.3. Elemen balok Timoshenko dengan dua derajat kebebasan w dan θ
dalam suatu DOI
Pada sub bab sebelumnya, formulasi matriks massa, kekakuan struktur,
kekakuan geometris, dan gaya konsisten yang bekerja pada balok telah dituliskan
pada persamaan (3.11) sampai (3.14). Namun untuk mendapatkan nilai matriks
[M], [K], [Kg], dan {F} diperlukan integrasi numerik. Pada penelitian ini integrasi
persamaan (3.11) sampai (3.14) menggunakan Gauss Quadrature. Langkah –
langkah perhitungan integrasi numerik dengan menggunakan Gauss Quadrature
adalah sebagai berikut:
1. Batas integrasi pada persamaan tersebut (dari 0 sampai L) diubah menjadi
dari -1 ke +1. Hal ini terjadi karena digunakan sistem natural coordinates
𝜉 yang terletak tepat ditengah – tengah balok, dan panjang balok dalam
satuan koordinat 𝜉 dianggap sama dengan 2.
2. Apabila terdapat suatu fungsi y = 𝑓(𝑥) di mana 𝐼 = ∫ 𝑓(𝑥)𝑏
𝑎𝑑𝑥, maka
transformasi persamaan I untuk perhitungan Gauss Quadrature adalah:
𝑥 =1
2(1 − 𝜉)𝑎 +
1
2(1 + 𝜉)𝑏 (3.22a)

26 Universitas Kristen Petra
Persamaan I tersebut berubah menjadi 𝐼 = ∫ 𝜙(𝜉) 𝑑𝜉1
−1 di mana 𝜙 berisi
nilai transformasi Jacobian, 𝐽 =𝑑𝑥
𝑑𝜉, dan persamaan integral I diubah
menjadi kedalam bentuk integrasi numerik sebagai berikut:
𝐼 = ∑ 𝑤𝑖𝜙(𝜉𝑖)𝑛𝑠𝑎𝑚𝑝
𝑖=1 (3.22b)
Dalam persamaan diatas, 𝑤𝑖 adalah faktor bobot (weighting factor) dan 𝜉𝑖
adalah titik contoh (sampling point).
3. Jumlah minimal titik contoh yang digunakan ditentukan sesuai derajat
polinomial yang diintegrasikan. Apabila derajat polinomial adalah 2𝑛 − 1
maka akan diintegrasikan secara eksak dengan jumlah titik contoh n pada
Gauss Quadrature. Nilai faktor bobot tergantung dari jumlah titik contoh
n. Tabel nilai titik contoh dan faktor bobot sampai dengan orde n = 4 akan
diperlihatkan pada Tabel 3.3.
Tabel 3.3. Nilai faktor bobot dan titik contoh untuk penggunaan integrasi
numerik Gauss Quadrature.
Orde n 𝝃𝒊 𝒘𝒊
1 0 2
2 ±
1
√3
1
3 ±√0.6 5
9
0 8
9
4
± [3 + 2√1.2
7]
12
1
2−
1
6√1.2
± [3 − 2√1.2
7]
12
1
2+
1
6√1.2
Sumber: Syamsoeyadi H. (2009), dikutip dari Cook et al. (1989)

27 Universitas Kristen Petra
3.5. Eliminasi Shear Locking: Metode Discrete Shear Gap
Dalam metode ini, perumusan regangan geser diformulasikan sepanjang
elemen, dan hasil dari regangan geser diskrit pada setiap titik nodal diinterpolasi
sepanjang domain elemen (Bletzinger et al, 1998). Metode ini mirip dengan
metode ANS (Assumed Natural Strain) atau MITC (Mixed Interpolation of
Tensiorial Component) yang dikembangkan oleh Bathe dan rekan – rekannya
dalam bilinear element.
Pada elemen balok Timoshenko, regangan geser dapat diperoleh dengan
persamaan (3.2b). Deformasi geser adalah integrasi dari regangan geser, dan
persamaannya dapat diperoleh dari integrasi persamaan (3.2b). Persamaan
deformasi geser dapat ditulis menjadi:
∆𝑤𝛾(𝑥) = ∫ 𝛾𝑥
𝑥0𝑑𝑥
= ∫ (𝑑𝑤
𝑑𝑥− 𝜃)
𝑥
𝑥0
𝑑𝑥
= ∫ (𝑑𝑤
𝑑𝑥− 𝜃)
𝑥
𝑥0
𝑑𝑥
= 𝑤|𝑥0𝑥 − ∫ 𝜃 𝑑𝑥
𝑥
𝑥0
∆𝑤𝛾(𝑥) = 𝑤(𝑥) − 𝑤(𝑥0) − ∆𝑤𝑏 (3.23a)
∆𝑤𝛾(𝑥) = ∆𝑤 − ∆𝑤𝑏 (3.23b)
di mana:
∆wγ (x) = Perbedaan perpindahan geser pada titik x
w(x) = Perpindahan total pada titik x
w(x0) = Perpindahan total pada titik x0
∆wb = Perbedaan perpindahan lentur
∆w = Perbedaaan perpindahan total
Adapun ∆wγ dapat pula disebut sebagai shear gap yang merupakan
perbedaan dari perubahan perpindahan total ∆w dan perubahan perpindahan lentur
murni ∆wb. Shear gap pada titik nodal ke – i (∆wγ i) dapat didapatkan dengan
mengintegrasi regangan geser diskrit dari titik nodal pertama hingga titik nodal ke
– i, sehingga persamaan (3.23b) dapat diubah menjadi:
∆𝑤𝛾 𝑖(𝑥𝑖) = ∫ 𝛾ℎ𝑥𝑖
𝑥0𝑑𝑥 = 𝑤ℎ|𝑥0
𝑥𝑖 − ∫ 𝜃ℎ 𝑑𝑥𝑥𝑖
𝑥0 (3.24)

28 Universitas Kristen Petra
Ilustrasi mengenai shear gap dapat dilihat pada Gambar 3.4. Shear Gap
dapat diinterpolasi pada balok dengan shear gap pada setiap titik nodal balok,
sehingga dapat pula ditulis sebagai berikut:
∆𝑤𝛾 = ∑ 𝑁𝑖 ∆𝑤𝛾 𝑖𝑛𝑖=1 (3.25)
Regangan geser dapat diperoleh dari turunan persamaan (3.25), dapat ditulis
sebagai berikut:
𝛾ℎ = 𝛾𝐷𝑆𝐺 = ∑𝑑𝑁𝑖
𝑑𝑥 ∆𝑤𝛾 𝑖
𝑛𝑖=1 (3.26)
Gambar 3.4. Balok Timoshenko yang mengalami lendutan, serta shear gap pada
balok.
Regangan geser yang didapatkan dari persamaan (3.26) digunakan untuk
menggantikan nilai regangan geser dari elemen balok Timoshenko standar.
Namun regangan geser ini perlu dihubungkan dengan degree of freedom balok
Timoshenko yaitu w dan θ. Untuk melakukan hal tersebut, nilai Δwγi perlu
dihubungkan w dan θ. Hubungan tersebut didapatkan dapat dilihat pada
persamaan (3.24). Persamaan (3.24) tersebut juga dapat ditulis sebagai berikut:
∆𝑤𝛾 𝑖 = 𝑤𝑖 − 𝑤1 − ∫ (∑ 𝑁𝑖 𝜃𝑖𝑛𝑖=1 ) 𝑑𝑥
𝑥𝑖
𝑥1 (3.27)
di mana:
∆wγi = Perbedaan perpindahan geser pada titik nodal ke – i
dengan titik nodal pertama dalam DOI
wi = Perpindahan geser pada titik nodal ke - i
w(x0)
∫ 𝛾𝑥𝑖
𝑥0𝑑𝑥 = Discrete Shear Gap
Δw
w(xi)
Distribusi Shear Gap
∫ 𝜃𝑥𝑖
𝑥0
𝑑𝑥

29 Universitas Kristen Petra
w1 = Perpindahan geser pada titik nodal pertama dalam DOI
xi = Koordinat titik nodal ke - i
x1 = Koordinat titik nodal pertama dalam DOI
Ni = Nilai shape function pada titik nodal ke – i
θi = Nilai θ pada titik nodal ke – i
n = Jumlah titik nodal dalam DOI
Oleh karena nilai Δwγi merupakan perbedaan perpindahan geser pada
titik nodal ke – i dengan titik nodal pertama dalam DOI, maka nilai Δwγ1 menjadi
sama dengan nol. Persamaan (3.27) juga dapat ditulis sebagai berikut:
∆𝑤𝛾 𝑖 = 𝑤𝑖 − 𝑤1 − (∫ 𝑁1 𝜃1 𝑑𝑥𝑥𝑖
𝑥1+ ∫ 𝑁2 𝜃2 𝑑𝑥
𝑥𝑖
𝑥1+ . . . + ∫ 𝑁𝑛 𝜃𝑛 𝑑𝑥
𝑥𝑖
𝑥1)
= 𝑤𝑖 − 𝑤1 − [∫ 𝑁1 𝑑𝑥𝑥𝑖
𝑥1 ∫ 𝑁2 𝑑𝑥
𝑥𝑖
𝑥1 … ∫ 𝑁𝑛 𝑑𝑥
𝑥𝑖
𝑥1] [
𝜃1
𝜃2
⋮𝜃𝑛
] (3.28)
Maka untuk nilai i dari 1 sampai n, nilai ∆wγi dapat ditulis sebagai berikut:
∆𝑤𝛾1 = 0
∆𝑤𝛾2 = 𝑤2 − 𝑤1 − (∫ 𝑁1 𝜃1 𝑑𝑥𝑥2
𝑥1+ ∫ 𝑁2 𝜃2 𝑑𝑥
𝑥2
𝑥1+ . . . + ∫ 𝑁𝑛 𝜃𝑛 𝑑𝑥
𝑥2
𝑥1)
∆𝑤𝛾3 = 𝑤3 − 𝑤1 − (∫ 𝑁1 𝜃1 𝑑𝑥𝑥3
𝑥1+ ∫ 𝑁2 𝜃2 𝑑𝑥
𝑥3
𝑥1+ . . . + ∫ 𝑁𝑛 𝜃𝑛 𝑑𝑥
𝑥3
𝑥1)
. . .
∆𝑤𝛾𝑛 = 𝑤𝑛 − 𝑤1 − (∫ 𝑁1 𝜃1 𝑑𝑥𝑥𝑛
𝑥1+ ∫ 𝑁2 𝜃2 𝑑𝑥
𝑥𝑛
𝑥1+ . . . + ∫ 𝑁𝑛 𝜃𝑛 𝑑𝑥
𝑥𝑛
𝑥1)
Oleh karena itu, ∆wγi untuk nilai i dari 1 sampai n dapat dihubungkan dengan
matriks [D], menjadi sebagai berikut:
∆𝑤𝛾1 = 0
∆𝑤𝛾2 = [−1 − ∫ 𝑁1 𝑑𝑥𝑥2
𝑥1
1 − ∫ 𝑁2 𝑑𝑥𝑥2
𝑥1
0 − ∫ 𝑁3 𝑑𝑥𝑥2
𝑥1
0 − ∫ 𝑁4 𝑑𝑥𝑥2
𝑥1
… 0 − ∫ 𝑁𝑛 𝑑𝑥𝑥2
𝑥1
]
[ 𝑤1
𝜃1𝑤2
𝜃2
⋮𝑤𝑛
𝜃𝑛 ]
= [−1 − ∫ 𝑁1 𝑑𝑥𝑥2
𝑥1
1 − ∫ 𝑁2 𝑑𝑥𝑥2
𝑥1
0 − ∫ 𝑁3 𝑑𝑥𝑥2
𝑥1
0 − ∫ 𝑁4 𝑑𝑥𝑥2
𝑥1
… 0 − ∫ 𝑁𝑛 𝑑𝑥𝑥2
𝑥1
] [𝐷]
∆𝑤𝛾3 = [−1 − ∫ 𝑁1 𝑑𝑥𝑥3
𝑥1 0 − ∫ 𝑁2 𝑑𝑥
𝑥3
𝑥1 1 − ∫ 𝑁3 𝑑𝑥
𝑥3
𝑥1 0 − ∫ 𝑁4 𝑑𝑥
𝑥3
𝑥1 … 0 − ∫ 𝑁𝑛 𝑑𝑥
𝑥3
𝑥1] [𝐷]

30 Universitas Kristen Petra
∆𝑤𝛾4 = [−1 − ∫ 𝑁1 𝑑𝑥𝑥4
𝑥1 0 − ∫ 𝑁2 𝑑𝑥
𝑥4
𝑥1 0 − ∫ 𝑁3 𝑑𝑥
𝑥4
𝑥1 1 − ∫ 𝑁4 𝑑𝑥
𝑥4
𝑥1 … 0 − ∫ 𝑁𝑛 𝑑𝑥
𝑥4
𝑥1] [𝐷]
. . .
∆𝑤𝛾𝑛 = [−1 − ∫ 𝑁1 𝑑𝑥𝑥𝑛
𝑥1
0 − ∫ 𝑁2 𝑑𝑥𝑥𝑛
𝑥1
0 − ∫ 𝑁3 𝑑𝑥𝑥𝑛
𝑥1
0 − ∫ 𝑁4 𝑑𝑥𝑥𝑛
𝑥1
… 1 − ∫ 𝑁𝑛 𝑑𝑥𝑥𝑛
𝑥1
] [𝐷]
Maka matriks ∆wγi dapat pula ditulis seperti dibawah ini:
∆𝑤𝛾1 0 0 0 0 0 0 . . . 0 0
∆𝑤𝛾2 -1 −∫ 𝑁1 𝑑𝑥𝑥2
𝑥1
1 −∫ 𝑁2 𝑑𝑥𝑥2
𝑥1
0 −∫ 𝑁3 𝑑𝑥𝑥2
𝑥1
. . . 0 −∫ 𝑁𝑛 𝑑𝑥𝑥2
𝑥1
[∆𝑤𝛾] = ∆𝑤𝛾3 = -1 −∫ 𝑁1 𝑑𝑥𝑥3
𝑥1
0 −∫ 𝑁2 𝑑𝑥𝑥3
𝑥1
1 −∫ 𝑁3 𝑑𝑥𝑥3
𝑥1
. . . 0 −∫ 𝑁𝑛 𝑑𝑥𝑥3
𝑥1
[D]
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮
∆𝑤𝛾𝑛 -1 −∫ 𝑁1 𝑑𝑥𝑥𝑛
𝑥1
0 −∫ 𝑁2 𝑑𝑥𝑥𝑛
𝑥1
0 −∫ 𝑁3 𝑑𝑥𝑥𝑛
𝑥1
. . . 1 −∫ 𝑁𝑛 𝑑𝑥𝑥𝑛
𝑥1
[∆𝑤𝛾] = [𝐵𝛾𝐷𝑆𝐺2][𝐷]
Maka persamaan (3.26) dapat ditulis menjadi:
[𝛾𝐷𝑆𝐺] = [𝑑𝑁1
𝑑𝑥
𝑑𝑁2
𝑑𝑥⋯
𝑑𝑁𝑛
𝑑𝑥] [∆𝑤𝛾]
= [𝐵𝛾𝐷𝑆𝐺1][∆𝑤𝛾]
= [𝐵𝛾𝐷𝑆𝐺1] [𝐵𝛾𝐷𝑆𝐺2][𝐷]
[𝛾𝐷𝑆𝐺] = [𝐵𝛾𝐷𝑆𝐺][𝐷] (3.29)
Nilai dari matriks [BγDSG] digunakan untuk menggantikan matriks [Bγ] =
[𝜕 𝜕𝑥⁄ [𝑁𝑤] − [𝑁𝜃]] pada persamaan (3.12) untuk menghitung matriks kekakuan
geser. Maka persamaan (3.12) menjadi sebagai berikut:
[𝐾] = ∫ [𝜕 𝜕𝑥⁄ [𝑁𝜃]]𝑇
𝐸𝐼 [𝜕 𝜕𝑥⁄ [𝑁𝜃]]𝐿
0+ ∫ [𝐵𝛾𝐷𝑆𝐺]
𝑇𝑘𝐺𝐴 𝜕
𝜕𝑥⁄ [𝐵𝛾𝐷𝑆𝐺]𝑑𝑥 𝐿
0 (3.30)
3.6. Eliminasi Shear Locking: Metode Modified Field Matching
Dari interpolasi Kriging, dapat diperoleh shape function N1, N2, …, Nn
yang nilainya diperoleh untuk membentuk matrix [Nw] dan [Nθ]. Adapun isi dari
kedua matriks tersebut telah disebutkan dalam persamaan (3.21a) dan (3.21b).
Namun apabila shape function ini digunakan maka dapat menimbulkan shear
locking, sehingga perlu dilakukan modifikasi terhadap shape function pembentuk
matriks kekakuan elemen. Dalam metode ini nilai dari [Nθ] tidak didapatkan dari
persamaan (3.21b) namun menurut Wong (2009) nilai [Nθ] didapatkan dari

31 Universitas Kristen Petra
turunan pertama terhadap shape function untuk defleksi yaitu [Nw]. Maka, nilai
dari [Nθ] dapat ditulis sebagai berikut:
[𝑁𝜃] =𝜕
𝜕𝑥[𝑁𝑤] (3.27)
Metode di atas dinamakan Field Matching Method. Akan tetapi menurut
Wong (2009), hasil dari Field Matching Method di atas tidak menghasilkan
elemen yang bebas dari shear locking. Oleh karena itu, persamaan (3.23) tersebut
perlu dimodifikasi. Nilai shape function yang dihasilkan oleh persamaan (3.23)
tidak memiliki sifat delta Kronecker. Agar memiliki sifat tersebut ruas kanan pada
persamaan (3.23) perlu dikalikan dengan koordinat x dari masing – masing titik
nodal dalam DOI. Maka persamaan (3.23) dimodifikasi menjadi sebagai berikut:
[𝑁𝜃] = [𝑥]T𝜕
𝜕𝑥[𝑁𝑤] (3.28a)
di mana:
[𝑥] = {𝑥1 𝑥2 ⋯ 𝑥𝑛} (3.28b)
Top Related
Copyright © 2022 FDOKUMEN

