Viscosimetros
-
Upload
itvillahermosa -
Category
Documents
-
view
0 -
download
0
Transcript of Viscosimetros

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
“VISCOSÍMETRO DE BOLA”
TESIS QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTA BLANCA ESTELA SÁNCHEZ HERNÁNDEZ
ASESORES M. EN C. ARTURO RANGEL MERINO DR. ROBERTO LINARES Y MIRANDA
MÉXICO, D. F. 2008.


ÍNDICE
OBJETIVO ........................................................................................................................... I
ALCANCE...........................................................................................................................II
JUSTIFICACIÓN ............................................................................................................. III
INTRODUCCIÓN............................................................................................................. IV
CAPÍTULO 1 ANTECEDENTES ......................................................................................1
1.1 FLUIDOS .................................................................................................................. 1 1.2 VISCOSIDAD ............................................................................................................ 1 1.3 CLASIFICACIÓN DE VISCOSÍMETROS ........................................................................ 3
1.3.1 Viscosímetros Capilares ................................................................................. 3 1.3.2 Viscosímetros Rotacionales............................................................................ 5 1.3.3 Viscosímetro de Caída de bola ....................................................................... 6
1.4 RESUMEN ................................................................................................................ 8
CAPÍTULO 2 METODOLOGÍA DE LA CAÍDA DE BOLA.........................................9
2.1 PESO Y PRINCIPIO DE ARQUÍMEDES ......................................................................... 9 2.2 FUERZA DE ROZAMIENTO......................................................................................... 9 2.3 LEY DE STOKES ..................................................................................................... 11
CAPÍTULO 3 CONSTRUCCIÓN DEL VISCOSÍMETRO..........................................13
3.1 INTRODUCCIÓN...................................................................................................... 13 3.2 DIAGRAMAS A BLOQUES DE LA SOLUCIÓN PROPUESTA .......................................... 14 3.3 FUNCIONAMIENTO GENERAL DESEADO ................................................................. 15 3.4 DESCRIPCIÓN TÉCNICA.......................................................................................... 17
3.4.1 Tubo Contenedor .......................................................................................... 17 3.4.2 Giro............................................................................................................... 18
3.4.2.1 Electroimán............................................................................................... 19 3.4.2.2 Motor ........................................................................................................ 20 3.4.2.3 Excitador para motor y electroimán ......................................................... 20
3.4.3 Detectores de Bola........................................................................................ 21 3.4.3.1 Emisor Infrarrojo ...................................................................................... 23 3.4.3.2 Receptor Infrarrojo ................................................................................... 23
3.4.4 Control de Temperatura................................................................................ 23 3.4.4.1 Sensor de Temperatura ............................................................................. 26 3.4.4.2 Calentador................................................................................................. 27 3.4.4.3 Bomba....................................................................................................... 28 3.4.4.4 Fotoacopladores........................................................................................ 28
3.4.5 Exhibidor Alfanumérico ............................................................................... 28 3.4.6 Comunicación USB ...................................................................................... 29 3.4.7 Microcontrolador .......................................................................................... 30 3.4.8 Fuente de Alimentación................................................................................ 35
3.4.8.1 Transformador .......................................................................................... 36 3.4.8.2 Rectificador .............................................................................................. 36

3.4.8.3 Regulador ................................................................................................. 37 3.4.9 Análisis de información mediante una computadora personal..................... 37
CAPÍTULO 4 CARACTERIZACIÓN DEL VISCOSÍMETRO...................................39
4.1 CALIBRACIÓN: AGUA ............................................................................................. 39 4.1.1 Parámetros de la bola.................................................................................... 39 4.1.2 Resultados..................................................................................................... 40
4.2 PRUEBA: ADITIVO PARA GASOLINA ....................................................................... 41 4.2.1 Parámetros de la bola.................................................................................... 41 4.2.2 Resultados..................................................................................................... 42
CONCLUSIONES..............................................................................................................43
BIBLIOGRAFÍA................................................................................................................44
ANEXOS .............................................................................................................................47
ANEXO 1 CÁLCULOS ELÉCTRICOS ..................................................................................... 47 Detectores de Bola........................................................................................................ 47 Selección de RP para DS1621....................................................................................... 48 Fuente de alimentación de 5V (LM2575) .................................................................... 49 Fuente de alimentación de 13V (LM2575) .................................................................. 50 Control de potencia todo o nada ................................................................................... 53 Fotoacoplador (MOC3041) .......................................................................................... 53
ANEXO 2 TABLAS DE ESPECIFICACIONES ........................................................................... 54 Motor - reductor ........................................................................................................... 54 Excitador para motor y electroimán (L293D) .............................................................. 54 Emisor Infrarrojo (IR383) ............................................................................................ 55 Sensor de temperatura (DS1621).................................................................................. 55 Fotoacopladores (MOC3041) ....................................................................................... 56 Exhibidor Alfanumérico (AND491)............................................................................. 56 Microcontrolador (PIC18F452).................................................................................... 57 Reguladores (LM2575) ................................................................................................ 57
ANEXO 3 DIAGRAMAS ELÉCTRICOS ................................................................................... 58 Tarjeta Principal ........................................................................................................... 58 Fuente de Alimentación................................................................................................ 60 Tubo.............................................................................................................................. 61 Detectores de bola ........................................................................................................ 62 Medición de temperatura .............................................................................................. 62 Comunicación microcontrolador – PC ......................................................................... 63 Control de actuadores (Bomba y calentador) ............................................................... 63
ANEXO 4 DIAGRAMAS MECÁNICOS ................................................................................... 64 Tubo.............................................................................................................................. 64 Depósito de Acero ........................................................................................................ 65 Soporte para Tubo ........................................................................................................ 66 Detectores de bola ........................................................................................................ 67
ANEXO 5 FOTOGRAFÍAS..................................................................................................... 68 ANEXO 6 EQUIPO TERMINADO .......................................................................................... 70 ANEXO 7 DESCRIPCIÓN DE PARTES .................................................................................... 71
ANEXO 8 ÍNDICE DE IMÁGENES ......................................................................................... 73 ANEXO 9 ÍNDICE DE TABLAS ............................................................................................. 75 ANEXO 10 FACTORES DE CONVERSIÓN ............................................................................. 76 ANEXO 11 FICHA TÉCNICA (ADITIVO) ............................................................................... 77 ANEXO 12 GLOSARIO ........................................................................................................ 78


I
Objetivo Diseñar y construir un dispositivo para medir la viscosidad de líquidos empleando la técnica de caída de bola. Con el equipo a diseñar se debe poder procesar la información obtenida, generando un registro permanente de los resultados obtenidos y finalmente poder desplegarlos mediante un exhibidor alfanumérico y/o hacia una computadora personal.
II
Alcance El proyecto desarrollado debe incorporar funciones de registro de datos, visualización gráfica, programación del número de pruebas a realizar a temperaturas programables con conexión a una computadora personal. El procesamiento de la información obtenida durante las pruebas solo podrá realizarse en la PC conectada al equipo. No se contempla la incorporación de este dispositivo conectado a una red.
III
Justificación En la actualidad existen diversos tipos de medidores de viscosidad (rotacionales, capilares, etc.) que son utilizados dentro de los laboratorios para realizar pruebas de fluidos. Un viscosímetro instrumentado reducirá la intervención del usuario en cada prueba. Con lo anterior, se debe lograr la agilización de la obtención de resultados de la viscosidad de diversos fluidos con mayor eficiencia y exactitud. Asimismo, ofrecer la posibilidad de tener un registro permanente de cada prueba realizada permitirá analizarlas a detalle para históricos.
IV
Introducción
La necesidad de entender nuestro mundo ha llevado al ser humano a desarrollar nuevas técnicas que le permitan interpretar mejor los conocimientos que adquiere mediante la observación, e incluso la tecnología ha permitido analizar la naturaleza sin la intervención del hombre. Esto se debe a que el ser humano no tiene la capacidad de medir ciertos fenómenos por sus propias limitaciones. Uno de los parámetros mas importantes a medir dentro de la industria es la viscosidad, la cual además de ser una variable de gran influencia en las mediciones de flujo de fluidos, se usa como punto de referencia en la formulación de nuevos productos facilitando la reproducción de la consistencia de un lote a otro. Para poder medir este parámetro se han desarrollado diversos equipos, cuyo mecanismo determina el alcance que tiene para comparar diversos fluidos. Dicho mecanismo puede ser simple o muy complejo, lo que a su vez determina su precio en el mercado. Las principales diferencias entre los viscosímetros existentes son: - Técnica empleada - Exactitud - Automatización - Atemperación1 - Precio El viscosímetro de caída de bola emplea una técnica muy simple; sin embargo es muy exacta en comparación con otros dispositivos y es muy fácil de utilizar. Su principal desventaja radica en que la medición de la viscosidad depende de la intervención humana, pues el tiempo de caída de la bola se determina mediante un cronómetro manual y las capacidades visuales del observador. Otra desventaja que tiene este medidor (e incluso otros viscosímetros que emplean una técnica diferente) es que no cuenta con una conexión hacia la computadora ni el programa que permita analizar e interpretar los resultados obtenidos, lo cual es muy importante dentro de la investigación y el desarrollo de la ciencia. Por lo anterior, se pretende a través de este proyecto, diseñar un viscosímetro de caída de bola que pueda medir con exactitud la viscosidad de los fluidos y además que ofrezca otras opciones que lo hagan ser mas útil, práctico y novedoso frente a otros modelos en el mercado. Para lograr esto, se estructuró esta investigación de la forma siguiente: Capítulo 1 Antecedentes
En este capítulo se definen los conceptos más importantes que permitan entender mejor las funciones de un medidor de viscosidad. Conceptos tales como fluido, clasificación de fluidos, viscosidad (unidades) y técnicas para calcularla. 1 Moldear, templar. Acomodar una cosa a otra.
V
Capítulo 2 Metodología de la Caída de Bola En este capítulo se exponen las expresiones matemáticas que permiten obtener la viscosidad dinámica y cinemática a través de la técnica de caída de bola. Capítulo 3 Construcción del Viscosímetro Se describe cada uno de los elementos que conforman el medidor de viscosidad. Capítulo 4 Caracterización del Viscosímetro
En este capítulo se realizan las pruebas correspondientes para la caracterización de la bola y la medición de la viscosidad de un líquido.


1
Capítulo 1 Antecedentes 1.1 FLUIDOS Los fluidos son aquellos cuerpos cuyas moléculas tienen poca coherencia entre sí, tomando la forma del recipiente que los contiene. Los fluidos se clasifican en dos tipos: - Fluidos newtonianos: son aquellos que fluyen a través de un recipiente sin que se les
aplique una fuerza externa por área2. - Fluidos no newtonianos: requieren un valor mínimo de τ para iniciar el escurrimiento. Existen varios casos de fluidos no newtonianos. El estudio de las propiedades de deformación de las sustancias en función de los esfuerzos que a ellas se les aplican se denomina Reología. Los fluidos, como todos los materiales, tienen propiedades físicas que permiten caracterizar y cuantificar su comportamiento así como distinguirlos unos de otros. Características como la viscosidad, tensión superficial y presión de vapor, sólo se pueden definir en los líquidos y gases. 1.2 VISCOSIDAD La viscosidad es una propiedad distintiva de los fluidos. Está ligada a su resistencia al deformarse continuamente cuando se le somete a un esfuerzo de corte. De hecho esta propiedad es la utilizada para distinguir el comportamiento entre los fluidos y los sólidos. Desde el punto de vista físico, la viscosidad se debe al efecto combinado de la cohesión entre las moléculas y al intercambio de cantidad de movimiento entre las capas del fluido en movimiento. Las fuerzas de cohesión entre las moléculas hacen que al desplazarse unas con respecto a las otras, tiendan a ser arrastradas las partículas vecinas. Esta fuerza de cohesión depende de la separación entre las moléculas, la cual influye de manera importante en los fluidos. A medida que la velocidad de las moléculas crece, este factor disminuye. Existe también un intercambio de cantidad de movimiento entre las placas del fluido que se desplazan debido a que hay partículas de distinta velocidad que, al escurrir el fluido, pasan de una capa a otra. Debido a que la velocidad de las moléculas de los fluidos aumenta con la temperatura, el efecto de las fuerzas de cohesión disminuye y el de intercambio de cantidad de movimiento aumenta. Un gráfico del comportamiento de algunos materiales típicos en función de la viscosidad se incluye en la figura 1.1.
2 Se conoce como esfuerzo de corte τ.

2
Figura 1.1.- Comportamiento de un fluido viscoso
En esta gráfica puede observarse las diferencias que existen entre los diversos fluidos con respecto a su viscosidad:
- Flujo ideal, en el cual la viscosidad se puede considerar despreciable. - Flujo newtoniano, la viscosidad es constante. - Flujo plástico, en el cual es necesario un esfuerzo de corte inicial para que comience
a fluir. Este es el caso típico de las pinturas de aceite. - Fluido dilatante. En éstos la viscosidad aumenta con la taza de deformación3.
La viscosidad η (dinámica o absoluta) deberá tener dimensiones de fuerza–tiempo/(longitud)2 o masa/(longitud⋅tiempo). Se utilizan ambos grupos dimensionales, aunque para la mayoría de los trabajos científicos, las viscosidades se expresan en poises y centipoises.
2
6
-2
-3 2
1g1poise=
m s
=1×10 centipoises
=1×10 micropoises
=6.72 10 lb/(pies)(seg)
=242 lb/(pies)(hr)
=2.09 10 lb/ft
⋅
×
×
3 Fenómeno que se presenta cuando actúa una fuerza sobre un cuerpo.
Newtoniano
Plástico ideal
Plástico (Bingham)
Pseudo – Plástico
Dilatante
Fluido ideal τ
µ
Sólido
3
Al cociente de la viscosidad dinámica y la densidad del fluido se le conoce como viscosidad cinemática µ, cuyas unidades son m2/s. Comúnmente se emplean los stokes o centistokes (una centésima de stokes) para representar este parámetro. 1.3 CLASIFICACIÓN DE VISCOSÍMETROS Un viscosímetro es un equipo para medir la viscosidad de un fluido. Existen tres técnicas básicas prácticas para determinar la viscosidad de un líquido newtoniano: a) Midiendo el flujo del líquido a través de tubos (viscosímetros capilares). b) Viscosímetros rotacionales. c) Empleando patrones de viscosidad de fluidos conocidos. 1.3.1 Viscosímetros Capilares Normalmente estos modelos tienen la forma de un tubo en U como se pueden apreciar en la figura 1.2, así tenemos el viscosímetro de Ostwald, el viscosímetro de Cannon–Fenske y el viscosímetro de Ubbelohde. El diseño más simple de este tipo de modelos es el viscosímetro de Ostwald. El viscosímetro se llena con la solución que se desea evaluar hasta el nivel superior, o marca A, posteriormente el fluido se succiona rebasando la marca del bulbo a través del tubo capilar, hasta la marca B. Como siguiente paso, el fluido pasa a través del tubo capilar bajo la influencia de la presión hidrostática del mismo. Se registra el tiempo que tarda en pasar el fluido de la marca B a la marca C a través del tubo capilar. El tiempo se multiplica por una constante del instrumento para determinar la viscosidad cinemática del fluido:
Viscosidad cinemática = constante tiempo×
El tiempo que le toma al fluido pasar por el tubo capilar es inversamente proporcional a la densidad del fluido, y directamente proporcional a la viscosidad dinámica4, obteniendo la expresión:
tiempoµρ
∞
Donde: µ Viscosidad dinámica. ρ Densidad del fluido.
4 Se determina midiendo el gradiente de la velocidad del fluido y el esfuerzo cortante.
4
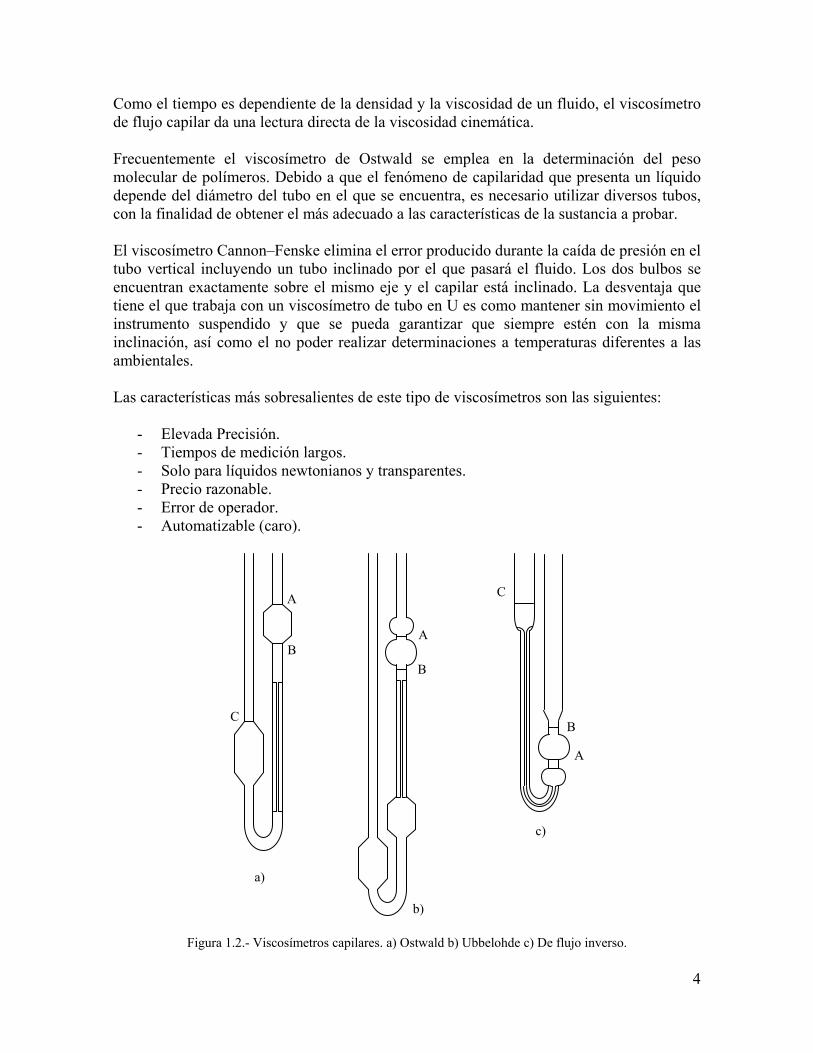
Como el tiempo es dependiente de la densidad y la viscosidad de un fluido, el viscosímetro de flujo capilar da una lectura directa de la viscosidad cinemática. Frecuentemente el viscosímetro de Ostwald se emplea en la determinación del peso molecular de polímeros. Debido a que el fenómeno de capilaridad que presenta un líquido depende del diámetro del tubo en el que se encuentra, es necesario utilizar diversos tubos, con la finalidad de obtener el más adecuado a las características de la sustancia a probar. El viscosímetro Cannon–Fenske elimina el error producido durante la caída de presión en el tubo vertical incluyendo un tubo inclinado por el que pasará el fluido. Los dos bulbos se encuentran exactamente sobre el mismo eje y el capilar está inclinado. La desventaja que tiene el que trabaja con un viscosímetro de tubo en U es como mantener sin movimiento el instrumento suspendido y que se pueda garantizar que siempre estén con la misma inclinación, así como el no poder realizar determinaciones a temperaturas diferentes a las ambientales. Las características más sobresalientes de este tipo de viscosímetros son las siguientes:
- Elevada Precisión. - Tiempos de medición largos. - Solo para líquidos newtonianos y transparentes. - Precio razonable. - Error de operador. - Automatizable (caro).
Figura 1.2.- Viscosímetros capilares. a) Ostwald b) Ubbelohde c) De flujo inverso.
A B
B B
C B
A B
B B
C B
B B A B
b)
c)
a)

5
1.3.2 Viscosímetros Rotacionales Estos viscosímetros se basan en el principio de que la fuerza requerida para rotar un objeto inmerso en un fluido puede indicar la viscosidad del fluido. Estos instrumentos consisten en una copa conteniendo la muestra, la cual gira a una velocidad rotacional ω. En el líquido se encuentra un cilindro sumergido representando un cilindro coaxial de altura h y radio r1. El cilindro interno está suspendido a un alambre de torsión produciendo un torque como resultado de las fuerzas viscosas del fluido rotando sobre éste, logrando un estado estacionario del movimiento. En algunos instrumentos el cilindro interno está rotando y el torque se mide en la copa, o bien, a un torque constante aplicado se observa la deformación resultante. A una distancia r del centro, ese torque es igual a:
22T r h Fπ= ⋅ ⋅ ⋅ ⋅
Donde T: torque, h: altura del cilindro interno, y F: tensor de esfuerzo al radio r. Así a partir de una medición de torque leída, podemos estimar el tensor de esfuerzos aplicado al fluido. Los viscosímetros rotacionales pueden tomar varias formas, y éstas son normalmente descritas en términos de sus sistemas de medición pero el principio es el mismo para todos.
Algunos de ellos son:
- El viscosímetro de aguja que funciona determinando el torque requerido para lograr una cierta rotación.
- El viscosímetro de cono y plato que emplea un cono que se introduce en el fluido a
una muy poca profundidad haciendo contacto con el plato. Un ejemplo de este tipo de medidores es el que se muestra en la figura 1.3, el cual determina la viscosidad y otras características reológicas. Cuenta con un display digital que muestra directamente la lectura de la viscosidad en centipoises, centistokes ó milipascales, la velocidad en rpm5, la temperatura en °C ó °F, la densidad en gr/cm3 y también indica que aguja se está usando durante la prueba. Este viscosímetro es un modelo innovador frente a otros aparatos pues incluye las funciones siguientes: - Tiene la posibilidad de cambiar las unidades del Sistema inglés (SI) al Sistema métrico
decimal (CGS). - Se pueden escoger 19 velocidades desde 0.3 hasta 200 rpm. - Se puede programar el torque para que el aparato se detenga cuando se cumpla con esa
consigna. 5 Revoluciones por minuto.

6
- Se puede programar el tiempo de duración de la prueba. - El equipo lleva a cabo un AUTOTEST con alarmas visuales y acústicas en caso de
funcionamiento incorrecto. - Disminución progresiva de la velocidad cada vez que la rotación tiende a detenerse para
evitar una vibración brusca en el eje. - Función de AUTORANGO. - Tiene 10 memorias de Trabajo (recuerda tipo de aguja, velocidad, unidades utilizadas,
etc.). - El usuario puede calibrar la viscosidad y la temperatura. - Tiene una interfase bidireccional RS232 para enviar los datos a una PC ó a una
impresora. - Tiene 8 opciones de lenguaje (incluido el español). - Programa Datalogger para enviar los datos a la PC directamente a Excel vía RS232.
Figura 1.3.- Ejemplo. Viscosímetro rotacional. 1.3.3 Viscosímetro de Caída de bola Consiste en un recipiente que contiene un fluido viscoso. Su funcionamiento se basa en introducir una pequeña esfera dentro del recipiente, la cual parte del reposo y rápidamente alcanza la velocidad límite6. El tiempo que le toma recorrer la distancia L determina la viscosidad del fluido. Las variables que intervienen en el proceso de medición son: ρ1 Densidad de la esfera sólida. ρ2 Densidad del líquido. L Longitud que cae la esfera en un tiempo t. V0 Velocidad límite de la esfera.
6 Es la relación que existe entre la distancia que recorre la esfera y el tiempo que tarda en hacerlo.

7
Este tipo de instrumentos se utiliza principalmente en los sectores siguientes: - Industria de aceites minerales (aceites, líquidos hidrocarbonos). - Industria alimentaria (soluciones de azúcar, miel, cerveza, leche, gelatina, zumos de
frutas). - Industria química (soluciones de polímeros, disolventes, soluciones de resinas,
dispersiones de látex, soluciones adhesivas). - Industria cosmética/farmacéutica (materias primas, glicerina, emulsiones, suspensiones,
soluciones, extractos). - Industria petrolera (crudo, aceite para máquinas, petróleo). - Carburantes (petróleo, aceite diesel y parafina). - Industria papelera (emulsiones, dispersiones de pigmentos, aditivos del papel). - Pinturas y barnices (tinas para impresión, barnices, acuarelas, tintas). Un ejemplo de este tipo de medidores es el que se muestra en la figura 1.4, el cual consta de un recipiente transparente aislado térmicamente a través del cual caen bolas de acero o niquel. En la tabla 1.1 se describen las características de cada una de ellas.
Esfera Material Diámetro (mm)
Peso (g) Densidad (g/cm3)
Constante K (mPas/cm3/g)
Intervalo de µ mPa.s
1 Vidrio 15.812 4.5983 2.221 0.00792 0.6-10 2 Vidrio 15.598 4.4073 2.218 0.09601 7-130 3 Hierro 15.606 16.1923 8.136 0.09042 30-700 4 Hierro 15.203 14.9622 8.132 0.65407 200-4800 5 Acero 14.286 11.6771 7.649 4.66080 800-10000 6 Acero 11.112 5.5351 7.705 33.82923 6000-75000
Tabla 1.1.- Ejemplo. Esferas y constantes empleadas para viscosímetro de bola.
Dentro del tubo, está colocado un termómetro que permite ver al usuario la temperatura que tiene el fluido. El fabricante proporciona un cronómetro para que el usuario determine el tiempo de caída de la esfera. Debido a esto, este modelo es apto para medir viscosidades bajas. Este equipo ofrece la capacidad de medir la viscosidad de gases utilizando bolas de borosilicato y además permite variar el ángulo de inclinación del recipiente para poder medir fluidos pseudoplásticos.
Las principales desventajas que tiene este medidor son: - Si la velocidad a la que cae la bola es muy grande, la lectura no es exacta. - La medición de la viscosidad requiere de la intervención del usuario, lo que resulta un
problema si se requiere realizar varias pruebas. - Este instrumento no puede medir la viscosidad de sustancias opacas. - Tampoco cuenta con una interfaz para PC.

8
Figura 1.4.- Ejemplo. Viscosímetro de caída de bola. 1.4 RESUMEN Tomando en cuenta las características de cada uno de los equipos utilizados para medir la viscosidad de líquidos newtonianos, se concluye que el viscosímetro de bola es el equipo más adecuado para desarrollar y construir, por las razones siguientes: Procesamiento de la información: - El cálculo de la viscosidad es simple, puesto que se obtiene midiendo el tiempo que
tarda un cuerpo en pasar a través de dos puntos. - Los elementos que intervienen en la medición de la viscosidad son pocos en
comparación con otros equipos, haciendo su control más eficiente. Además, cada uno de ellos puede caracterizarse fácilmente, puesto que sus parámetros son constantes e independientes (masa y volumen). Para lograr lo anterior, es posible utilizar instrumentos que se encuentran al alcance (calibrador, báscula, pipeta, etc.).
Fabricación: - Los materiales con los cuales se construye el viscosímetro son de fácil adquisición. - El costo de fabricación es bajo.

9
Capítulo 2 Metodología de la Caída de Bola Para conocer la técnica que emplean los viscosímetros de bola, es necesario estudiar el movimiento de caída de un cuerpo bajo la acción de su peso y de la fuerza de rozamiento del medio circundante a él, obteniendo expresiones que definan su velocidad en función del tiempo y su posición inicial. 2.1 PESO Y PRINCIPIO DE ARQUÍMEDES El peso es el producto de la masa por la aceleración de la gravedad g. La masa es el producto de la densidad del material ρ1 por el volumen de la esfera de radio R.
31
4
3W m g R gρ π= ⋅ = ⋅ ⋅ (1)
De acuerdo con el principio de Arquímedes: “Un objeto que se encuentra parcial o totalmente sumergido en un fluido experimenta una fuerza de empuje ascendente igual al peso del fluido desalojado”. Por tanto, el empuje es igual al producto de la densidad del fluido ρ1 por el volumen del cuerpo sumergido, y por la aceleración de la gravedad, esto es:
32
4
3E R gρ π= ⋅ ⋅ (2)
2.2 FUERZA DE ROZAMIENTO Cuando un cuerpo se mueve a través de un fluido, aparece una fuerza sobre él que se opone a dicho movimiento. Ésta recibe el nombre de fuerza de rozamiento y tiene su origen en los esfuerzos tangenciales y normales que ejerce el fluido sobre la superficie del objeto. Este parámetro resulta muy difícil de determinar analíticamente, ya que depende de varios factores. Por eso es necesario recurrir básicamente a la adquisición de datos experimentales y, con esta finalidad, es costumbre expresar dicha fuerza en la forma:
22
1
2 DF C Avρ= ⋅ ⋅ ⋅
Donde v es la velocidad relativa del cuerpo en el fluido, ρ2 es la densidad del fluido, A es el área de la sección transversal máxima que el cuerpo ofrece al flujo y CD es un parámetro empírico llamado coeficiente de arrastre, cuyo valor depende de la forma geométrica del
10
cuerpo y de la orientación de éste respecto al flujo, así como el valor del número de Reynolds asociado con el flujo alrededor del cuerpo. Dicho número de Reynolds (Re), es una magnitud adimensional definida en la forma:
2 d vRe
ρη⋅ ⋅=
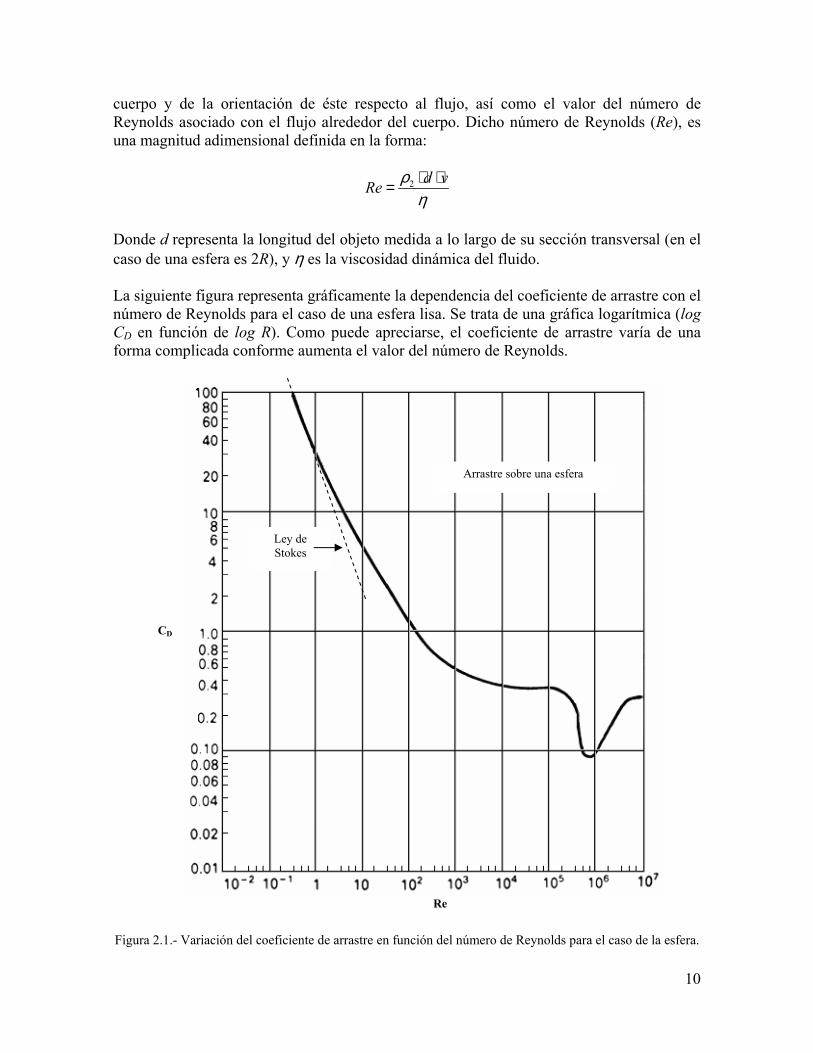
Donde d representa la longitud del objeto medida a lo largo de su sección transversal (en el caso de una esfera es 2R), y η es la viscosidad dinámica del fluido. La siguiente figura representa gráficamente la dependencia del coeficiente de arrastre con el número de Reynolds para el caso de una esfera lisa. Se trata de una gráfica logarítmica (log CD en función de log R). Como puede apreciarse, el coeficiente de arrastre varía de una forma complicada conforme aumenta el valor del número de Reynolds.
Figura 2.1.- Variación del coeficiente de arrastre en función del número de Reynolds para el caso de la esfera.
Ley de Stokes
Arrastre sobre una esfera
Re
CD

11
2.3 LEY DE STOKES Para un amplio intervalo de valores de Re, la forma funcional del coeficiente de arrastre Cd se señala de la forma siguiente:
24 60.4
Re 1 ReDC ≈ + +
+
Para pequeños valores del número de Reynolds (i.e., Re <1), el primer término domina. La fuerza de rozamiento sobre un cuerpo de forma esférica de radio R se enuncia así:
( )2 22
1 246
2 ReF r v r vρ π π η= ⋅ ⋅ ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅
6F r vπ η= ⋅ ⋅ ⋅ ⋅ (3) Expresión que se conoce como la ley de Stokes, en honor del físico irlandés Sir George Stokes (1819 – 1903), que la dedujo por primera vez en 1845. Esta ley establece que la fuerza de rozamiento que se opone al movimiento de una esfera a través de un fluido, cuando Re<1, es proporcional a la viscosidad del fluido, al diámetro de la esfera y a la velocidad de la misma en el seno del fluido. Si la bola cae verticalmente en el líquido, luego de un cierto tiempo se moverá con velocidad constante v y todas las fuerzas que actúan sobre ella se encontrarán en equilibrio, es decir:
Figura 2.2.- Cuerpo sumergido en un líquido.
EFW += (4)
W
F+E

12
Sustituyendo las expresiones (1), (2) y (3) en la expresión (4) se tiene lo siguiente:
3 31 2
4 46
3 3r g r v r gπ ρ π η π ρ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅
Para obtener la viscosidad dinámica η , agrupamos los términos:
3 3
1 2
4 46
3 3r g r g r vπ ρ π ρ π η⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅
( )31 2
46
3r g r vπ ρ ρ π η⋅ ⋅ ⋅ − = ⋅ ⋅ ⋅ ⋅
( )( )3
1 24
3 6
r g
r v
π ρ ρη
π⋅ ⋅ ⋅ ⋅ −
=⋅ ⋅ ⋅ ⋅
( )( )
21 22
9
r g
v
ρ ρη
⋅ ⋅ ⋅ −=
Finalmente se sustituye la velocidad t
dv =
( )( )
21 22
9
r g t
d
ρ ρη
⋅ ⋅ ⋅ − ⋅=
Considerando:
22
9
rK g
d= ⋅ ⋅
Obtenemos la ecuación para el cálculo de la viscosidad en el viscosímetro de bola, la ecuación queda:
( )1 2 (5)K tη ρ ρ= ⋅ − ⋅
Donde K es la constante de bola, que depende de la bola utilizada y de la temperatura del laboratorio. La K puede calcularse para una sustancia conocida, por ejemplo el agua destilada, y a partir de su valor buscar la viscosidad para cualquier líquido en un intervalo definido.

13
Capítulo 3 Construcción del Viscosímetro 3.1 INTRODUCCIÓN Como se vio en el capítulo 2, el viscosímetro de bola es un instrumento que permite medir la viscosidad dinámica a través de un tubo en el cual se coloca la sustancia a analizar. Además, el viscosímetro emplea cuerpos esféricos los cuales recorren una distancia d dentro del recipiente. Es importante notar que la velocidad inicial de dichos cuerpos debe ser cero, es decir, el movimiento a través del tubo es de caída libre. El tiempo que le tome pasar por ambos puntos determina la viscosidad empleando la expresión siguiente:
( )1 2K tη ρ ρ= ⋅ − ⋅
Como podemos ver, la medición del tiempo t es el principio del viscosímetro. Existen dos parámetros fundamentales que deben tomarse en cuenta para realizar las mediciones: la presión y la temperatura, ambos deben permanecer constantes durante el experimento pues de lo contrario pueden modificar el resultado. Tomando en cuenta lo anterior, se resaltan los principales puntos del proyecto: - Diseñar y construir un recipiente que permita almacenar el líquido a medir. Éste debe
ser de tal diámetro que la esfera se deslice a través del tubo fácilmente, es decir, que no oscile dentro de él ni que obstruya su paso. El material con el que esté fabricado el recipiente, debe soportar temperaturas entre los 10°C y los 70°C.
- Las esferas deben estar fabricadas con un material que evite su deformación durante el experimento, pues éstas estarán todo el tiempo en contacto con la sustancia a medir. Por tanto, se propone utilizar esferas de acero inoxidable.
- Medir el tiempo que le toma a la bola recorrer una distancia determinada dentro del tubo. Para ello, es importante diseñar un sistema que detecte el paso de la bola en 2 puntos.
- Considerando el hecho de que las esferas deben recorrer la distancia d en caída libre, se sugiere emplear un sistema que permita liberar dichos cuerpos sin tocarlos, esto es, que el mecanismo se encuentre fuera del recipiente.
- Proporcionar un sistema de control de temperatura dentro del recipiente. Dicho control
debe permitir al usuario ingresar la temperatura deseada entre un intervalo de 0°C y 70°C.
- Finalmente, se debe contemplar la posibilidad de enviar los resultados obtenidos a una computadora y desplegarlos mediante un programa.

14
3.2 DIAGRAMAS A BLOQUES DE LA SOLUCIÓN PROPUESTA De acuerdo a las premisas anteriores, los siguientes diagramas a bloques describen los elementos que conforman el viscosímetro a diseñar.
Figura 3.1.- Elementos que intervienen en la medición de la viscosidad.
Figura 3.2.- Tablero de programación. Interfaz con el usuario.
Liberar bola
Control de temperatura
Soporte
Giro
Recipiente
Medio termorregulador
Calefacción (actuador)
Detección de la bola
Medición de temperatura
Transporte (actuador)
Tablero de programación de funciones
Función de encendido/apagado
Función de reinicio del sistema
Interfaz visual con el usuario
Funciones de selección múltiple
Indicadores visuales de eventos
15
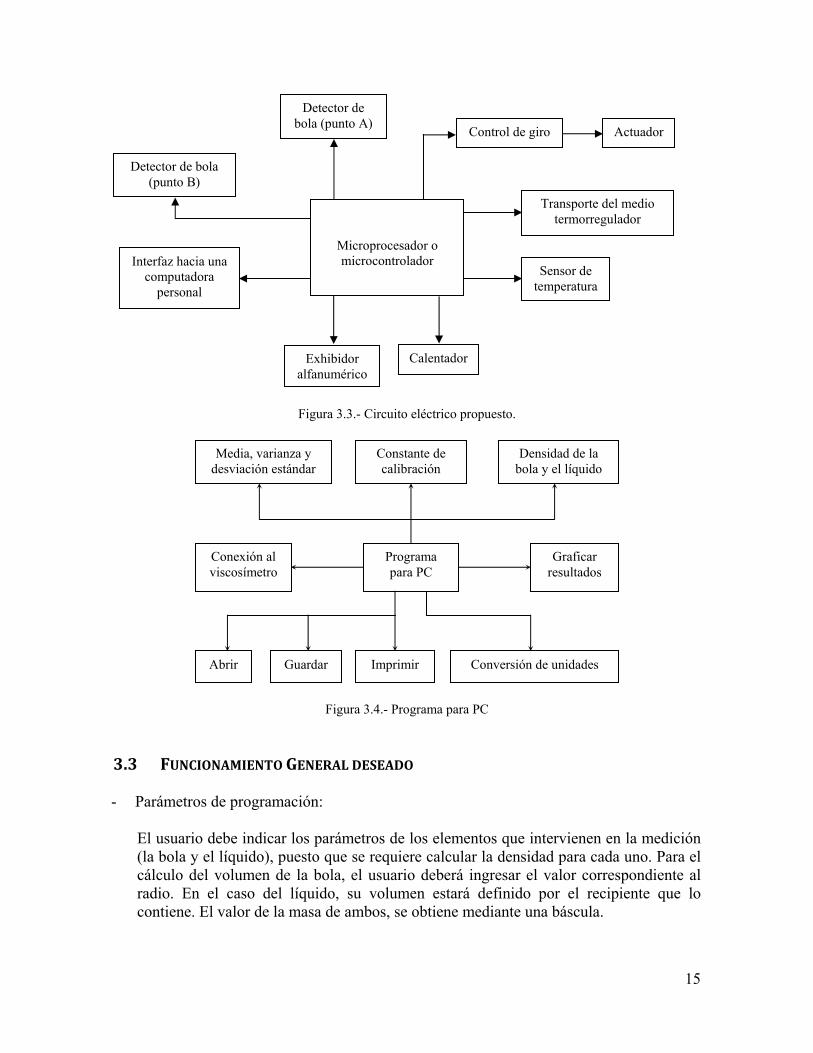
Figura 3.3.- Circuito eléctrico propuesto.
Figura 3.4.- Programa para PC 3.3 FUNCIONAMIENTO GENERAL DESEADO - Parámetros de programación:
El usuario debe indicar los parámetros de los elementos que intervienen en la medición (la bola y el líquido), puesto que se requiere calcular la densidad para cada uno. Para el cálculo del volumen de la bola, el usuario deberá ingresar el valor correspondiente al radio. En el caso del líquido, su volumen estará definido por el recipiente que lo contiene. El valor de la masa de ambos, se obtiene mediante una báscula.
Programa para PC
Graficar resultados
Media, varianza y desviación estándar
Guardar Abrir Imprimir Conversión de unidades
Densidad de la bola y el líquido
Conexión al viscosímetro
Constante de calibración
Microprocesador o microcontrolador
Sensor de temperatura
Detector de bola (punto A)
Transporte del medio termorregulador
Calentador Exhibidor alfanumérico
Interfaz hacia una computadora
personal
Detector de bola (punto B)
Control de giro Actuador

16
- Número de pruebas:
En muchos casos será necesario hacer más de una medición (e. g., en casos estadísticos). Es por ello que el usuario podrá programar a través de un tablero el número de pruebas a realizar, agilizando el proceso de medición.
- Modo de operación: Dentro del estudio de la viscosidad de un fluido, es importante conocer su comportamiento a diferentes temperaturas. Es por ello que el equipo a diseñar debe contemplar la posibilidad de variar la temperatura en cada prueba. Por lo anterior, se proponen los siguientes modos de operación: Temperatura constante: La temperatura de cada una de las pruebas será la misma. En este caso, el equipo debe ofrecer la posibilidad de calcular la media aritmética y la desviación estándar de todas las pruebas.
Temperatura variable: El usuario podrá someter la sustancia a prueba a diferentes temperaturas.
- Control de temperatura: Una vez que se hayan capturado los parámetros anteriores, el viscosímetro debe ajustar la temperatura deseada en cada caso, mediante un sistema de control que regule el calor suministrado al líquido de prueba. Para determinar la cantidad de calor aplicado, el sistema de control debe medir constantemente la temperatura del fluido de tal forma que la diferencia entre la temperatura real y la requerida sea mínima. En la figura 3.5 se describe los elementos que debe conformar el sistema:
Figura 3.5.- Sistema de control de temperatura.
Calefactor (actuador)
Medición de la temperatura
Comparación entre las temperaturas real y
requerida Entrada que depende de la diferencia entre las temperatura real y requerida
Entrada
Señal de temperatura requerida
Salida
Temperatura
Señal de retroalimentación relacionada con la temperatura real

17
- Caída de la bola:
Cuando se alcance la temperatura deseada, el viscosímetro deberá adecuar la posición del tubo y de la bola para que ésta pase a través de dos puntos (A y B) en caída libre.
3.4 DESCRIPCIÓN TÉCNICA Para llevar a cabo cada una de las tareas mencionadas en las figuras anteriores, se seleccionaron los elementos adecuados para cada uno de ellos. En los siguientes apartados se describe la tarea a realizar en cada bloque y sus características principales. 3.4.1 Tubo Contenedor En los laboratorios se usan comúnmente recipientes fabricados a base de vidrio borosilicato, el cual se caracteriza por tener resistencia química máxima, dilatación térmica mínima y, en consecuencia, una elevada resistencia al choque térmico. El vidrio borosilicato tiene aproximadamente la composición siguiente:
Material Porcentaje
2 3B O (Óxido de Boro) 13 %
2 3Al O (Óxido de Aluminio) 2 %
2 2/Na O K O (Óxido de Boro)/(Óxido de Potasio) 4 %
2SiO (Óxido de Silicio) 81 %
Tabla 3.1.- Composición aproximada del Borosilicato.
El vidrio borosilicato es resistente al agua, ácidos, soluciones de sales, sustancias orgánicas y también frente a halógenos como cloro y bromo. Tiene buena resistencia frente a soluciones alcalinas. Sin embargo, es oportuno indicar que el ácido fluorhídrico, el ácido fosfórico concentrado y soluciones fuertemente alcalinas atacan la superficie del vidrio a temperaturas elevadas. La máxima temperatura de uso admisible es de 500ºC. La temperatura de transformación según DIN/ISO 3585 es de 525ºC. Los tubos Liebig o tubos rectos son instrumentos que permiten condensar gases almacenados dentro de un tubo. Para lograr esto, se hace pasar agua fría alrededor del mismo transformando el gas al estado líquido. Esta característica resulta conveniente dentro del diseño del tubo que almacenará el líquido, cubriendo los aspectos siguientes:
- El tubo que almacena el gas a condensar, resulta adecuado para alojar los líquidos de los cuales se desea conocer su viscosidad.
18
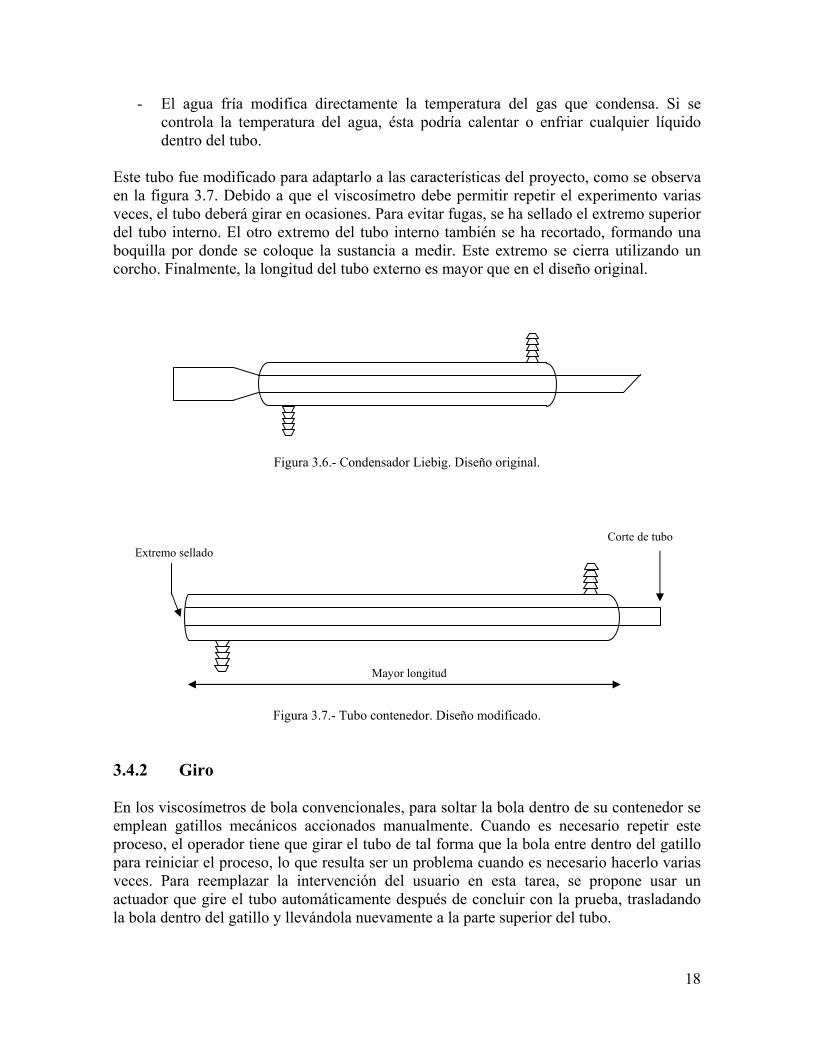
- El agua fría modifica directamente la temperatura del gas que condensa. Si se controla la temperatura del agua, ésta podría calentar o enfriar cualquier líquido dentro del tubo.
Este tubo fue modificado para adaptarlo a las características del proyecto, como se observa en la figura 3.7. Debido a que el viscosímetro debe permitir repetir el experimento varias veces, el tubo deberá girar en ocasiones. Para evitar fugas, se ha sellado el extremo superior del tubo interno. El otro extremo del tubo interno también se ha recortado, formando una boquilla por donde se coloque la sustancia a medir. Este extremo se cierra utilizando un corcho. Finalmente, la longitud del tubo externo es mayor que en el diseño original.
Figura 3.6.- Condensador Liebig. Diseño original.
Figura 3.7.- Tubo contenedor. Diseño modificado. 3.4.2 Giro En los viscosímetros de bola convencionales, para soltar la bola dentro de su contenedor se emplean gatillos mecánicos accionados manualmente. Cuando es necesario repetir este proceso, el operador tiene que girar el tubo de tal forma que la bola entre dentro del gatillo para reiniciar el proceso, lo que resulta ser un problema cuando es necesario hacerlo varias veces. Para reemplazar la intervención del usuario en esta tarea, se propone usar un actuador que gire el tubo automáticamente después de concluir con la prueba, trasladando la bola dentro del gatillo y llevándola nuevamente a la parte superior del tubo.
Extremo sellado
Mayor longitud
Corte de tubo
19
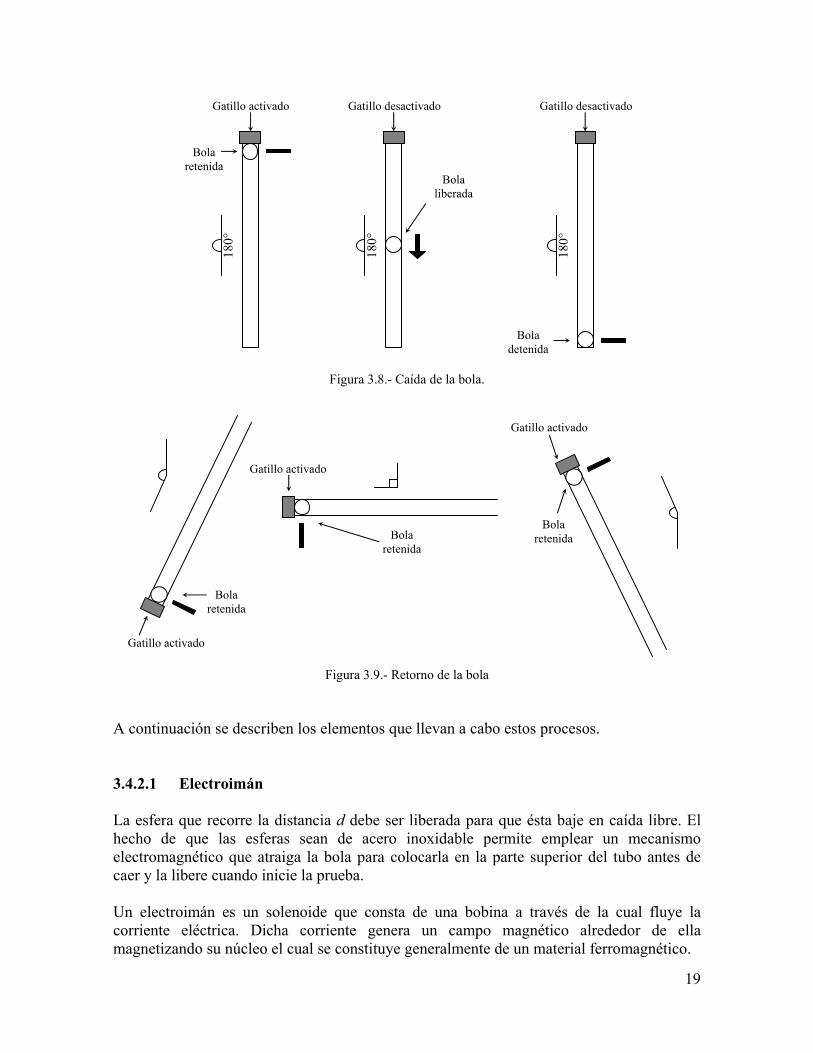
Figura 3.8.- Caída de la bola.
Figura 3.9.- Retorno de la bola
A continuación se describen los elementos que llevan a cabo estos procesos. 3.4.2.1 Electroimán La esfera que recorre la distancia d debe ser liberada para que ésta baje en caída libre. El hecho de que las esferas sean de acero inoxidable permite emplear un mecanismo electromagnético que atraiga la bola para colocarla en la parte superior del tubo antes de caer y la libere cuando inicie la prueba. Un electroimán es un solenoide que consta de una bobina a través de la cual fluye la corriente eléctrica. Dicha corriente genera un campo magnético alrededor de ella magnetizando su núcleo el cual se constituye generalmente de un material ferromagnético.
Bola retenida
Bola retenida
Bola retenida
Gatillo activado
Gatillo activado
Gatillo activado
Bola retenida
Bola liberada
Bola detenida
180°
180°
180°
Gatillo activado Gatillo desactivado Gatillo desactivado

20
Figura 3.10.- Dimensiones de un electroimán. 3.4.2.2 Motor El mecanismo que permita girar el tubo contenedor debe soportar el peso de la estructura de los sensores, el del tubo, el agua y el de la sustancia a medir. Por ello, se requiere utilizar un actuador (motor) cuyas características consideren lo anterior y que además permita invertir el giro. Para reducir su espacio y costo, se utilizó un motor – reductor el cual consta de un motor de corriente directa (CD) y un arreglo de engranes que permiten incrementar la fuerza con la que gira el motor (torque), y con ello disminuir sus revoluciones por minuto.
Figura 3.11.- Motor. Partes. Existen motores con reductora que no requieren que se les aplique voltaje entre sus terminales para mantener su eje inmóvil. Esto representa una gran ventaja pues limita el consumo de corriente mientras el viscosímetro está encendido. 3.4.2.3 Excitador para motor y electroimán Como se vio anteriormente, el recipiente que almacena el fluido a caracterizar debe girar en ambos sentidos. Para que el eje de un motor de CD pueda girar en las dos direcciones, es necesario invertir la corriente que circula a través de él según sea el caso. La forma más
Eje
Caja de engranes (reductora)
Motor de CD
Terminales de alimentación
Diámetro interno Lon
gitud de
l indu
ctor
Perímetro externo

21
sencilla de controlar un motor de corriente continua de baja potencia, en velocidad y sentido de giro, es mediante la conmutación electrónica de los circuitos realizados básicamente con transistores que reciben el nombre de puente en H. En la actualidad, existen circuitos integrados que realizan estas tareas. Tal es el caso del L293D el cual es un circuito integrado de cuatro canales que proporciona 600mA en cada uno. Cada canal es controlado por señales de entrada compatibles TTL para controlar cargas inductivas (como son relevadores, motores de CD y motores a pasos). Para simplificar su uso como 2 puentes, cada par de canales está equipado con una terminal de habilitación. Además, este circuito integra un pin de alimentación para la lógica del circuito y un pin especial para alimentar las cargas. Finalmente, este integrado incorpora en el mismo encapsulado diodos de protección para cargas inductivas.
Figura 3.12.- Control de cargas (electroimán y motor) 3.4.3 Detectores de Bola Debido a que los líquidos a medir y el tubo contenedor son transparentes, esto permite emplear sensores que pueden detectar la luz que pasa a través de estos medios. Por ello, se utilizaron señales luminosas y sensores infrarrojos (fototransistores), los cuales detectan el paso de la bola, pues ésta interrumpe la trayectoria del haz que viaja desde el emisor hasta el sensor. A continuación se describen los pasos a seguir para medir el tiempo de caída de la bola: a) Cuando la bola se encuentra en la parte superior del tubo sujetado por el electroimán, se
libera la bola mediante un pulso eléctrico.
L293D
M
1
0
1
0
VCC
VCC
Microprocesador o m
icrocontrolador
L293D
M
0
1
0
0
VCC Microprocesador o m
icrocontrolador
L293D
M
0
0
1
1
Microprocesador o m
icrocontrolador
22
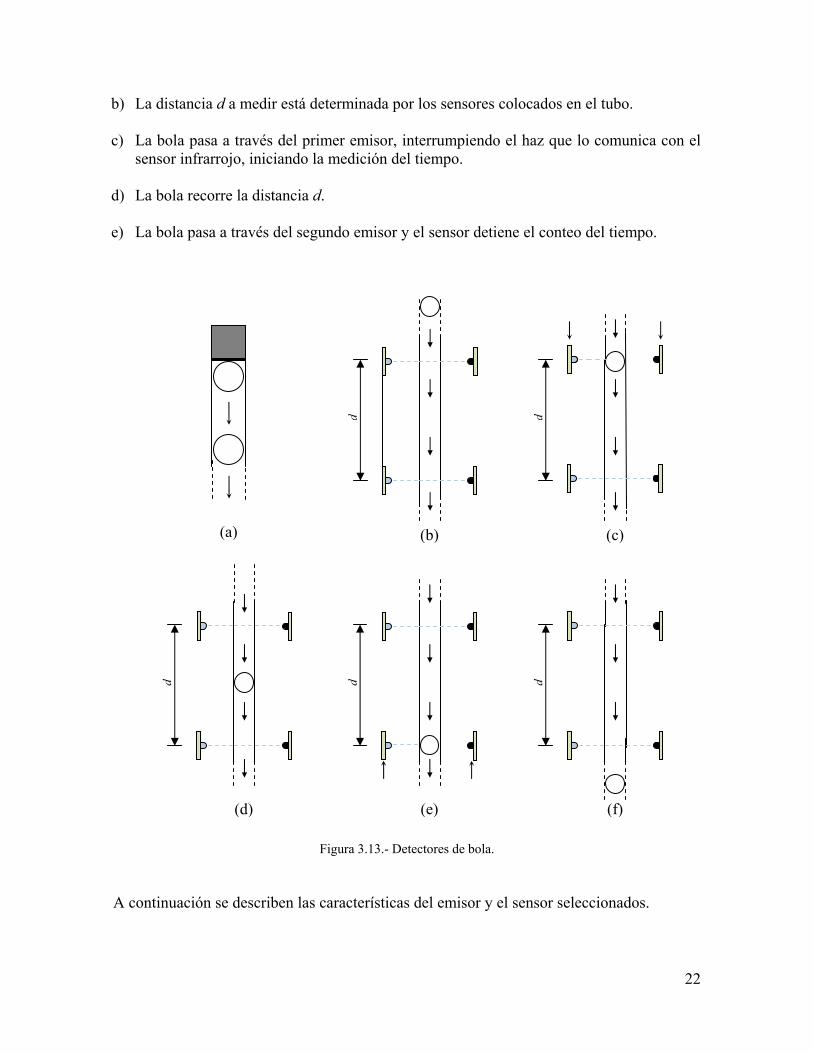
b) La distancia d a medir está determinada por los sensores colocados en el tubo. c) La bola pasa a través del primer emisor, interrumpiendo el haz que lo comunica con el
sensor infrarrojo, iniciando la medición del tiempo.
d) La bola recorre la distancia d.
e) La bola pasa a través del segundo emisor y el sensor detiene el conteo del tiempo.
Figura 3.13.- Detectores de bola. A continuación se describen las características del emisor y el sensor seleccionados.
d
d
d
d
d
(d) (e) (f)
(b) (c) (a)

23
3.4.3.1 Emisor Infrarrojo El IR383 es un emisor infrarrojo de gran intensidad, moldeado en un encapsulado color azul transparente, Sus principales aplicaciones son los interruptores fotoelectrónicos y sistemas infrarrojos. Los requisitos de conexión son los siguientes: - La corriente que requieren estos dispositivos es suministrada por un amplificador de
corriente entre microprocesador o microcontrolador y el emisor infrarrojo. - Como puede verse en la figura 3.13, se requiere emitir una luz infrarroja en dos puntos
de forma simultánea por lo que conectarlos en serie facilitaría su control. El esquema propuesto es el siguiente:
Figura 3.14.- Emisores infrarrojos. Diagrama a bloques. Los transistores son utilizados como interruptores en los circuitos eléctricos de potencia. Los circuitos de excitación de los transistores se diseñan para que éstos estén completamente saturados (activados) o en corte (saturación). Como solución al esquema propuesto, se utilizó el transistor BC547C el cual es un dispositivo bipolar NPN, cuyo valor de β es igual a 120. 3.4.3.2 Receptor Infrarrojo Una vez que se establece el uso de luz infrarroja como medio para la detección del paso de la bola, es necesario seleccionar los dispositivos semiconductores que puedan leer estas señales. El PT1302BC es un fototransistor NPN que se caracteriza por su sensibilidad a la luz infrarroja y a su rápida conmutación. Cuenta además con un filtro para la luz de día. Sus aplicaciones son los controladores de discos, video cámaras y en sistemas infrarrojos. 3.4.4 Control de Temperatura Como se menciona en el capítulo 1, la temperatura es uno de los parámetros que influye en la viscosidad de un líquido, pues si no permanece estable durante todas las pruebas, los resultados no serán los mismos cuando se repita el proceso (modo constante).
Dispositivo electrónico de
potencia Señal de control
24
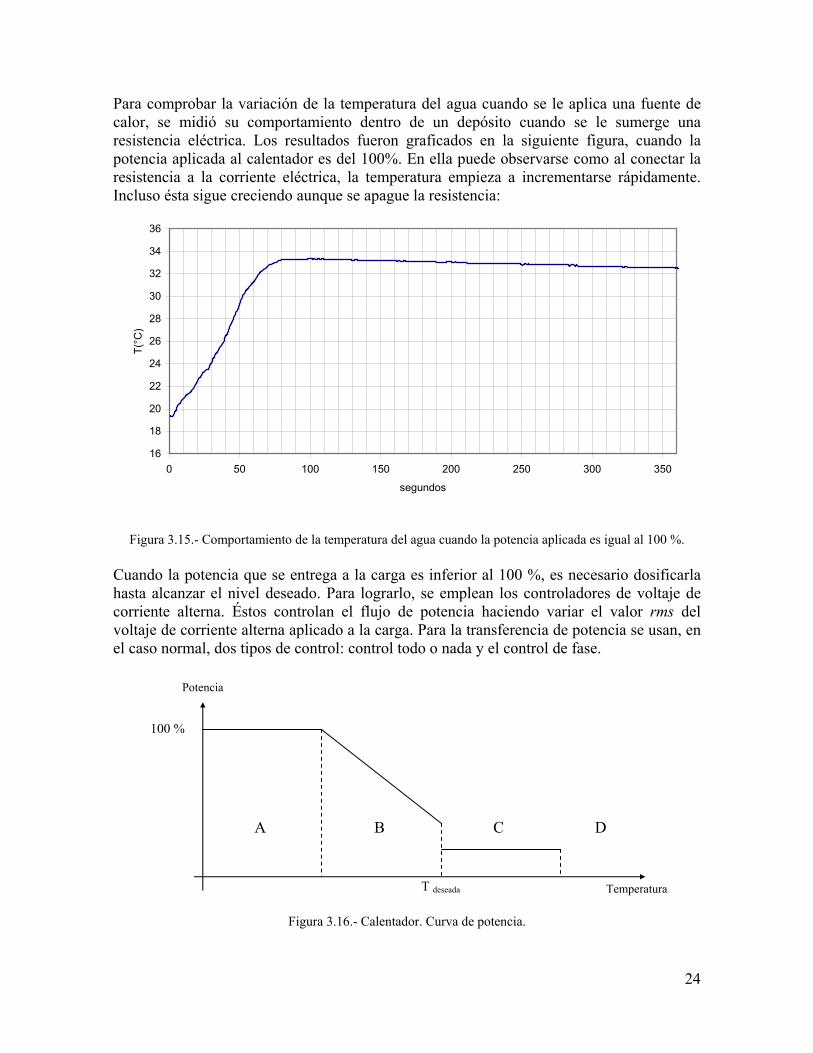
Para comprobar la variación de la temperatura del agua cuando se le aplica una fuente de calor, se midió su comportamiento dentro de un depósito cuando se le sumerge una resistencia eléctrica. Los resultados fueron graficados en la siguiente figura, cuando la potencia aplicada al calentador es del 100%. En ella puede observarse como al conectar la resistencia a la corriente eléctrica, la temperatura empieza a incrementarse rápidamente. Incluso ésta sigue creciendo aunque se apague la resistencia:
16
18
20
22
24
26
28
30
32
34
36
0 50 100 150 200 250 300 350
segundos
T(°C)
Figura 3.15.- Comportamiento de la temperatura del agua cuando la potencia aplicada es igual al 100 %. Cuando la potencia que se entrega a la carga es inferior al 100 %, es necesario dosificarla hasta alcanzar el nivel deseado. Para lograrlo, se emplean los controladores de voltaje de corriente alterna. Éstos controlan el flujo de potencia haciendo variar el valor rms del voltaje de corriente alterna aplicado a la carga. Para la transferencia de potencia se usan, en el caso normal, dos tipos de control: control todo o nada y el control de fase.
Figura 3.16.- Calentador. Curva de potencia.
A B C D
100 %
T deseada
Potencia
Temperatura

25
Dentro del proyecto se utilizó el control todo o nada, el cual resulta simple y de bajo costo. Lo anterior se debe a que la conmutación es por la línea o natural, por lo tanto no hay necesidad de circuitos adicionales.
Figura 3.17.- Convertidor on–off. Circuito eléctrico Para lograr que la potencia descienda, el número de ciclos n disminuye respecto a los ciclos m. A través de un interruptor, se permite el paso del voltaje hacia la carga. El cerebro del circuito eléctrico a proponer (microcontrolador o microprocesador), debe transmitir pulsos eléctricos al interruptor controlando la potencia suministrada a la carga. Además de esto, existen otros elementos que intervienen para la estabilidad de la temperatura del agua, los cuales se muestran en la figura siguiente:
Figura 3.18.- Control de Temperatura. Diagrama a bloques.
Microproc
esad
or o
microco
ntrolado
r
Interruptor electrónico
Calentador
Sensor
Transporte Interruptor electrónico
Medio Termorregulador Tubo Sus
tanc
ia
Calentador
26
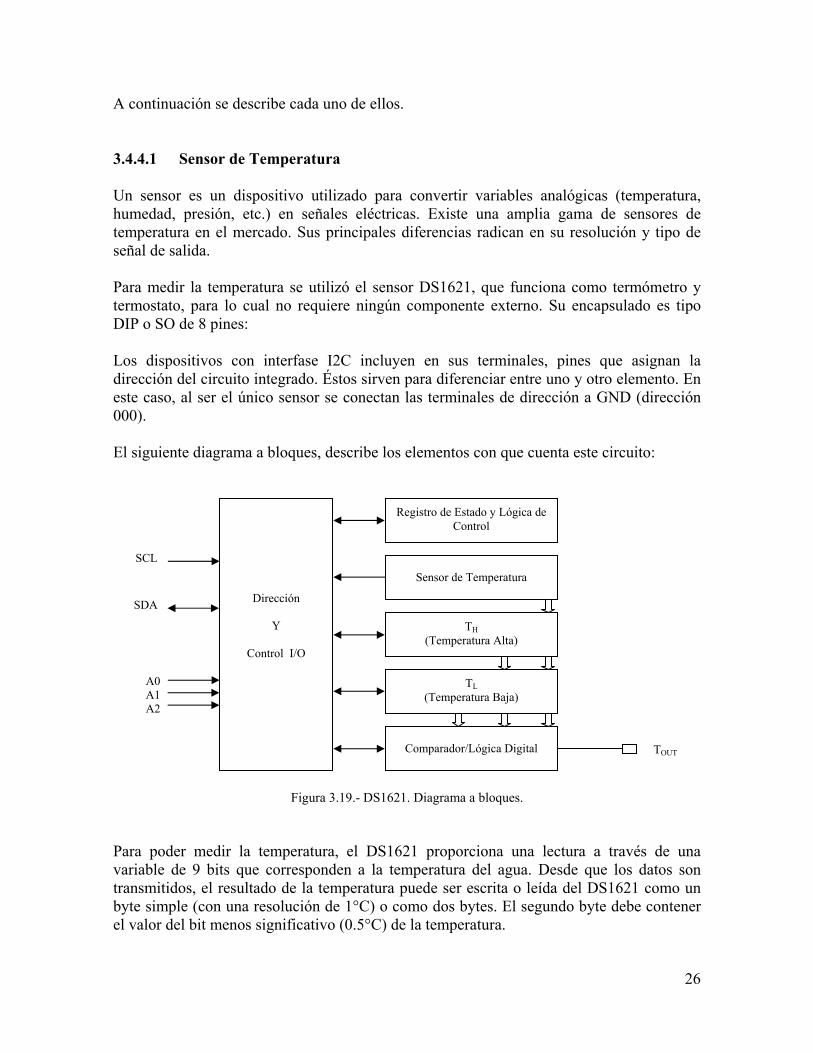
A continuación se describe cada uno de ellos. 3.4.4.1 Sensor de Temperatura Un sensor es un dispositivo utilizado para convertir variables analógicas (temperatura, humedad, presión, etc.) en señales eléctricas. Existe una amplia gama de sensores de temperatura en el mercado. Sus principales diferencias radican en su resolución y tipo de señal de salida. Para medir la temperatura se utilizó el sensor DS1621, que funciona como termómetro y termostato, para lo cual no requiere ningún componente externo. Su encapsulado es tipo DIP o SO de 8 pines: Los dispositivos con interfase I2C incluyen en sus terminales, pines que asignan la dirección del circuito integrado. Éstos sirven para diferenciar entre uno y otro elemento. En este caso, al ser el único sensor se conectan las terminales de dirección a GND (dirección 000). El siguiente diagrama a bloques, describe los elementos con que cuenta este circuito:
Figura 3.19.- DS1621. Diagrama a bloques. Para poder medir la temperatura, el DS1621 proporciona una lectura a través de una variable de 9 bits que corresponden a la temperatura del agua. Desde que los datos son transmitidos, el resultado de la temperatura puede ser escrita o leída del DS1621 como un byte simple (con una resolución de 1°C) o como dos bytes. El segundo byte debe contener el valor del bit menos significativo (0.5°C) de la temperatura.
Registro de Estado y Lógica de Control
Sensor de Temperatura
TH (Temperatura Alta)
TL (Temperatura Baja)
Comparador/Lógica Digital
Dirección Y
Control I/O
A0 A1 A2
SCL
SDA
TOUT
27
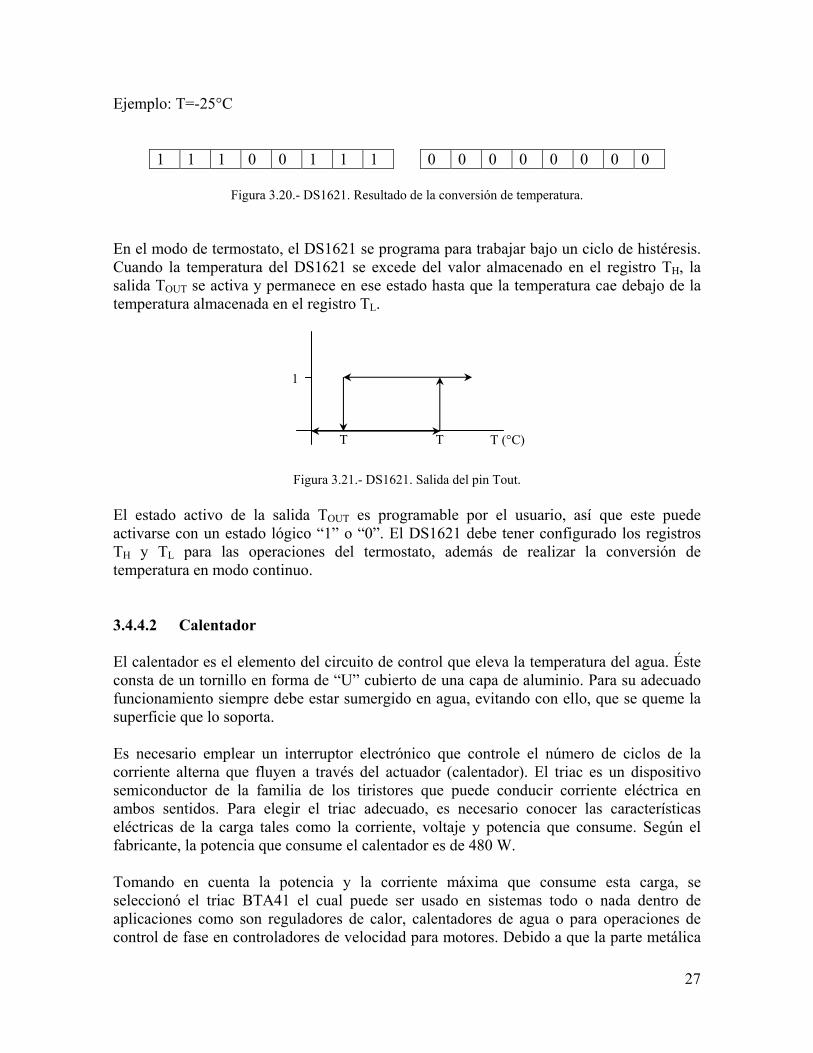
Ejemplo: T=-25°C
1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0
Figura 3.20.- DS1621. Resultado de la conversión de temperatura. En el modo de termostato, el DS1621 se programa para trabajar bajo un ciclo de histéresis. Cuando la temperatura del DS1621 se excede del valor almacenado en el registro TH, la salida TOUT se activa y permanece en ese estado hasta que la temperatura cae debajo de la temperatura almacenada en el registro TL.
Figura 3.21.- DS1621. Salida del pin Tout. El estado activo de la salida TOUT es programable por el usuario, así que este puede activarse con un estado lógico “1” o “0”. El DS1621 debe tener configurado los registros TH y TL para las operaciones del termostato, además de realizar la conversión de temperatura en modo continuo. 3.4.4.2 Calentador El calentador es el elemento del circuito de control que eleva la temperatura del agua. Éste consta de un tornillo en forma de “U” cubierto de una capa de aluminio. Para su adecuado funcionamiento siempre debe estar sumergido en agua, evitando con ello, que se queme la superficie que lo soporta. Es necesario emplear un interruptor electrónico que controle el número de ciclos de la corriente alterna que fluyen a través del actuador (calentador). El triac es un dispositivo semiconductor de la familia de los tiristores que puede conducir corriente eléctrica en ambos sentidos. Para elegir el triac adecuado, es necesario conocer las características eléctricas de la carga tales como la corriente, voltaje y potencia que consume. Según el fabricante, la potencia que consume el calentador es de 480 W. Tomando en cuenta la potencia y la corriente máxima que consume esta carga, se seleccionó el triac BTA41 el cual puede ser usado en sistemas todo o nada dentro de aplicaciones como son reguladores de calor, calentadores de agua o para operaciones de control de fase en controladores de velocidad para motores. Debido a que la parte metálica
T T T (°C)
1

28
del encapsulado está aislada de la terminal T2, esto permite disipar mejor la potencia del semiconductor. 3.4.4.3 Bomba Para transportar el agua desde algún depósito hasta el tubo donde se realizan las pruebas, se usó una bomba de agua de tipo sumergible que está cubierta por un empaque de plástico, la cual aisla la bomba para evitar el contacto con el agua. Este tipo de cargas también requieren un voltaje de 120V de corriente alterna a una frecuencia de 60Hz. Como interruptor electrónico se utilizó el triac BT137-600B el cual soporta una corriente de 8A y soporta cargas altamente inductivas. Además, fue necesario conectar una red snubber para la compuerta con un capacitor de poliéster para limitar los cambios de voltaje entre MT1 y MT2. 3.4.4.4 Fotoacopladores Por seguridad, es recomendable aislar las cargas (bomba y calentador) de cualquier circuito eléctrico utilizando fotoacopladores. El dispositivo empleado es el MOC3041 que consta de un diodo infrarrojo de Arseniuro de Galio que activa un fototriac. Además, incorpora un detector de cruce por cero, el cual evita que el triac conmute hasta que la señal alterna es cero. Este fotoacoplador está diseñado para usarse con un triac en la interfase de sistemas lógicos a equipos que se alimentan con 120V de corriente alterna, como lo son los sistemas de control industrial, motores, calentadores, control de iluminación, control de temperatura, etc. 3.4.5 Exhibidor Alfanumérico Para que el usuario pueda programar las tareas que llevará a cabo el viscosímetro, es necesario utilizar un dispositivo gráfico que indique al operador que ingrese cada uno de los parámetros deseados. Comúnmente se utilizan dispositivos visuales (displays de 7 segmentos, pantallas gráficas, etc.) para que los equipos electrónicos puedan proporcionar la información necesaria al usuario. Un exhibidor alfanumérico permite representar la información que genera cualquier equipo electrónico de una forma fácil y económica. La pantalla consta de una matriz de caracteres, distribuidos en 4 líneas de 16 caracteres. El fabricante ofrece un conjunto de instrucciones que permiten manipular el exhibidor. Éste identifica que instrucción se desea ejecutar gracias al estado de los bits de control (RS,R/W’ y E). Existen 2 tipos de conexión: 4 y 8 bits. Para utilizar un menor número de pines en el microcontrolador o el microprocesador seleccionado, se empleó una conexión de 4 bits.

29
Las funciones empleadas para este proyecto son las siguientes: - Inicialización. - Desplazamiento de caracteres hacia la derecha. - Movimiento del cursor. - Cambio de aspecto (limpiar pantalla). 3.4.6 Comunicación USB Uno de los requisitos establecidos para el diseño de este proyecto, es poder procesar los resultados obtenidos por el viscosímetro mediante una computadora personal, las cuales emplean puertos de comunicación con sus periféricos: impresoras, cámaras, unidades de almacenamiento, entre otros. El puerto USB, es actualmente el más usado para conectar equipos externos a una PC, reemplazando a los puertos serie y LPT, por su velocidad, compatibilidad y costo. Por tanto, es necesario utilizar los circuitos necesarios que nos permitan establecer la comunicación del microcontrolador o microprocesador a seleccionar con la computadora. Los requisitos para la conexión de este dispositivo son las siguientes: - El dispositivo empleado debe permitir conectar el viscosímetro a cualquier computadora
(compatible con el controlador de host UHCI/OHCI/EHCI así como versiones del USB 1.1 y 2.0).
- Dentro del mismo encapsulado debe manejar el protocolo USB y el módulo UART que
permita conectarlo con cualquier microcontrolador o microprocesador. - Los componentes asociados deben ser mínimos, reduciendo su espacio en el circuito
principal. - El voltaje de alimentación que utilice este circuito, debe tomarlo de una fuente de
alimentación propia, sin forzar la corriente que suministre el puerto de la PC, demandando tanta corriente como desee durante una operación normal. A su vez, el dispositivo debe suspenderse cuando la alimentación se apaga.
El circuito seleccionado que lleva a cabo estas tareas es el FT232BM, cuyo encapsulado tipo LQFP, permite conectarlo en cualquier cara del circuito impreso a diseñar. Una característica importante a resaltar, es el módulo regulador interno de 3.3V, el cual elimina el uso de una fuente externa que proporcione este voltaje para la operación del USB. El siguiente diagrama muestra los bloques con los que cuenta este circuito.

30
Figura 3.22.- FT232BM. Diagrama a bloques. Para que la computadora pueda reconocer este dispositivo, el fabricante provee los programas controladores que permiten ver al FT232BM como un puerto COM adicional, del cual puede configurarse su velocidad, tamaño de palabra y control de flujo, como cualquier otro puerto serie estándar. Es importante señalar que estos programas deben ser instalados antes de transmitir cualquier dato a través del puerto USB. 3.4.7 Microcontrolador Como se menciona en el apartado 3.2, se requiere de un dispositivo electrónico capaz de vigilar las actividades de cada uno de los bloques asociados. Por tanto, se usó un microcontrolador el cual es un circuito integrado programable que contiene los componentes necesarios para llevar acabo una tarea determinada, como el control de una lavadora, un teclado de ordenador, un sistema de alarma, etc. Para esto, el microcontrolador utiliza muy pocos componentes asociados. Un sistema con microcontrolador debe disponer de una memoria donde se almacena el programa que gobierna el funcionamiento del mismo que, una vez programado y configurado, sólo sirve para realizar la tarea asignada. La utilización de un microcontrolador en un circuito reduce notablemente el tamaño y número
3.3 Volts Regulador
LDO
Transceptor USB
DPLL USB
Oscilador 6 MHz
VCC
3V3OUT
USBDP
USBDM
Interfase Serial S I E
Protocolo USB
Controlador FIFO UART
UART
RXD TXD
RTS# CTS# DTR# DSR# DCD# RI#
TXDEN
TXLED# RXLED
Doble puerto TX 128 bytes
XTOUT XTIN
Multiplicador x8
48 MHz 12 MHz
Doble Puerto RX 384 bytes
Interfase EEPROM
EECS EESK# EEDATA
Generador RESET
RESET# 3V3OUT RSTOUT#
TEST GND
PWRCTL SLEEP# PWREN#

31
de componentes y, en consecuencia, disminuye el número de averías y el volumen y el peso de los equipos, entre otras ventajas. En los últimos años han tenido un gran auge los microcontroladores PIC fabricados por Microchip Technology. Estos dispositivos son una familia de microcontroladores que han tenido gran aceptación y desarrollo en los últimos años gracias a que sus buenas características, bajo precio, reducido consumo, tamaño pequeño, gran calidad, fiabilidad y abundancia de información, lo convierten en un circuito fácil, cómodo y rápido de utilizar. La relación que se establece entre el microcontrolador y los demás elementos se describe a continuación: - Giro del tubo:
A través de dos pines, el PIC invertirá el sentido del motor enviando las señales descritas en la tabla 3.5 y por otro lado, el electroimán será activado/desactivado mediante un pulso eléctrico pues no se requiere que éste invierta el sentido de la corriente que circula por él.
- Detectores de bola:
El microcontrolador utilizará un temporizador para medir el tiempo que tarda la bola en pasar a través de sus detectores.
- Control de temperatura:
El protocolo I2C comunica al PIC con el DS1621 (SDA y SCL) para leer la temperatura del agua que baña el tubo. Los triacs que controlan la bomba y el calentador se disparan a través de un pulso eléctrico enviado por el PIC18F452.
- Mensajes al exhibidor alfanumérico:
Dentro de la memoria del microcontrolador se almacenan los mensajes enviados al exhibidor.
- Comunicación con la PC:
El PIC cuenta con un módulo de comunicaciones seriales que permite enviar datos hacia un circuito externo. Éste es idóneo para transmitir los resultados hacia el FT232BM el cual a su vez, se comunica con el puerto USB de la PC.
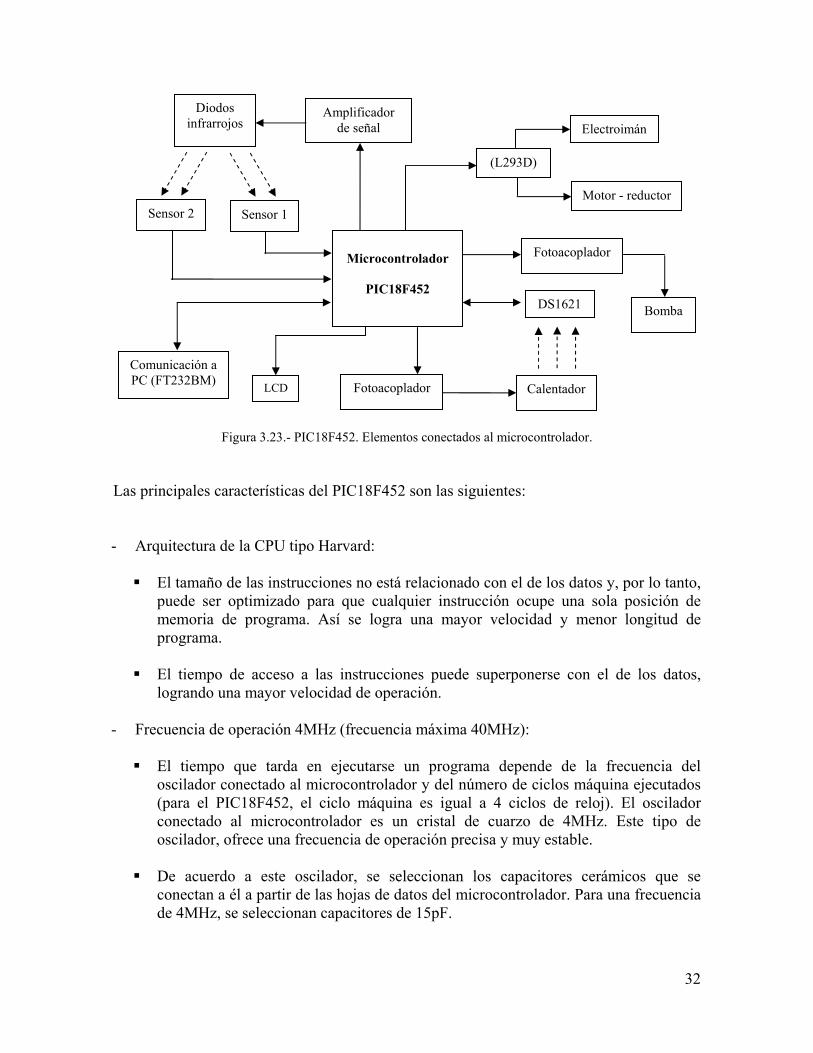
El siguiente diagrama muestra como se enlaza cada uno de los dispositivos descritos anteriormente con el microcontrolador PIC18F452:
32
Figura 3.23.- PIC18F452. Elementos conectados al microcontrolador. Las principales características del PIC18F452 son las siguientes: - Arquitectura de la CPU tipo Harvard:
El tamaño de las instrucciones no está relacionado con el de los datos y, por lo tanto, puede ser optimizado para que cualquier instrucción ocupe una sola posición de memoria de programa. Así se logra una mayor velocidad y menor longitud de programa.
El tiempo de acceso a las instrucciones puede superponerse con el de los datos,
logrando una mayor velocidad de operación. - Frecuencia de operación 4MHz (frecuencia máxima 40MHz):
El tiempo que tarda en ejecutarse un programa depende de la frecuencia del oscilador conectado al microcontrolador y del número de ciclos máquina ejecutados (para el PIC18F452, el ciclo máquina es igual a 4 ciclos de reloj). El oscilador conectado al microcontrolador es un cristal de cuarzo de 4MHz. Este tipo de oscilador, ofrece una frecuencia de operación precisa y muy estable.
De acuerdo a este oscilador, se seleccionan los capacitores cerámicos que se
conectan a él a partir de las hojas de datos del microcontrolador. Para una frecuencia de 4MHz, se seleccionan capacitores de 15pF.
Microcontrolador
PIC18F452 DS1621
Amplificador de señal
Diodos infrarrojos
Sensor 1
Fotoacoplador
Bomba
Fotoacoplador
Calentador LCD
(L293D)
Motor - reductor
Comunicación a PC (FT232BM)
Sensor 2
Electroimán
33
El cristal utilizado multiplicado por el número de ciclos máquina que tarda el microcontrolador en ejecutar una instrucción,
Esto resulta importante dentro de la medición del tiempo de caída de la bola, debido a que el timer se incrementa cada salto de línea, lo que permite tener una resolución en microsegundos de la lectura final.
- Memoria RAM de datos de 1.5Kbytes:
Su tamaño resulta insuficiente para guardar las cadenas de caracteres que se despliegan en el exhibidor o los parámetros de medición. Por lo tanto, se emplea para almacenar las temperaturas de cada prueba (modo variable) y los caracteres especiales enviados al exhibidor alfanumérico.
- Memoria de programa tipo flash de 32Kbytes para 16384 instrucciones:
La memoria de programa define que tan extenso puede ser el programa que lo contenga. El PIC18F452 es un microcontrolador de gama media que ofrece el espacio suficiente para el programa de este proyecto. Dicha memoria no solo almacena las instrucciones que se ejecutan, sino que además guarda los mensajes que se muestran en el exhibidor.
- Memoria EEPROM de 256 bytes:
Este espacio es empleado para almacenar los datos de cada prueba realizada: a) Segundos (16 bits = 2 bytes) b) Milisegundos (16 bits = 2 bytes) c) Microsegundos (16 bits = 2 bytes)
Para almacenar un máximo de 40 pruebas, el espacio ocupado es la suma del número de bytes por cada prueba multiplicado por el total de experimentos, es decir un total de 240 bytes.
- 18 Entradas de Interrupciones (prioridad alta o baja):
A diferencia de otros microcontroladores, el PIC18F452 establece 2 niveles de prioridad para las interrupciones. Esta característica es muy importante dentro del funcionamiento del viscosímetro, principalmente en el momento de realizar la medición de la viscosidad. Cuando la bola cae a través de tubo contenedor, tres procesos deben ocurrir de forma “casi” simultánea: el control de temperatura a través del DS1621 (prioridad baja), los sensores infrarrojos que determinan el tiempo en que la bola recorre la distancia d (prioridad alta) y la medición del tiempo (prioridad baja).
- Puerto de Entrada/Salida: A, B, C, D, E:
Este microcontrolador ofrece 5 puertos de comunicación para enviar y recibir datos, lo cual resulta útil al manejar numerosos circuitos.

34
- 4 Timers:
Este módulo permite medir el tiempo de cada prueba a través del timer2. Una vez que inicia la prueba, este temporizador se incrementa con cada ciclo de reloj.
- Comunicaciones Seriales: MSSP y USART:
Estos módulos implementan los estándares de comunicación serial para comunicarse con otros circuitos. Dentro del módulo MSSP se emplea la comunicación I2C con el DS1621. El USART permite enviar y recibir datos al convertidor FT232BM el cual se comunica con la PC a través del puerto USB.
- Convertidor Analógico–Digital 10 Bits (8 canales de entrada):
En este caso, se utilizó un canal de entrada (RA0) para leer el potenciómetro conectado al panel de control.
La siguiente tabla, asigna las funciones correspondientes para cada pin del microcontrolador:
Puerto Pin Elemento Descripción
1 RESET Se conecta a un interruptor en el panel de control. Cuando se desea detener el proceso de medición, este botón ofrece la opción de reiniciar el sistema.
RA0 2 Ajuste Este pin se conecta a la perilla (potenciómetro), la cual permite elegir el número de pruebas a realizar y la temperatura adecuada.
RA1 3 READY Conectado a un botón, este pin permite identificar cuando el usuario desea comenzar el proceso de medición.
RA2 4 SELECT Al igual que el botón READY, este pin que se conecta a un interruptor. Permite configurar los parámetros de medición.
RA3 5 ENTER Cuando este botón es pulsado, el usuario confirma la ejecución de un conjunto de instrucciones.
RA5 7 Calentador Enciende o apaga la resistencia dentro del agua.
RB0 33 Sensor_2 Se conecta al fototransistor que se encuentra en la parte inferior del tubo. Éste determina la medición del tiempo de caída de la bola.
RB1 34 Tout Lee la terminal Tout del sensor DS1621. Este pin se utiliza para indicar al microcontrolador cuando la temperatura está fuera del nivel deseado.
RB2 35 Sensor_1 Se conecta al fototransistor que se encuentra en la parte superior del tubo. Activa el conteo del timer2.

35
RB3 36 leds_IR Activa los emisores infrarrojos que se encuentran conectados en serie. Éstos envían un haz infrarrojo a través del tubo hasta sus respectivos fototransistores.
RB4 37 P1 Este pin lee el estado del tope 1 que se encuentra localizado en la base. Se emplea para determinar la posición del tubo contenedor.
RB5 38 P2 Este pin lee el estado del tope 2 que se encuentra localizado en la base. Se emplea para determinar la posición del tubo contenedor.
RB6 39 electroimán Éste se comunica con el L293D que activa a su vez el electroimán que libera la bola.
RB7 40 motor_T2 Al igual que RC5, este pin se enlaza con el L293D para controlar el giro o parada del motor – reductor.
RC0 15 Led Prueba Se activa cuando la bola pasa por el primer sensor y de desactiva cuando pasa por el segundo sensor.
RC1 16 Led on_off Se activa cuando el usuario pulsa el botón READY.
RC2 17 Led TX Se activa cuando el viscosímetro transmite los resultados a la PC.
RC3 18 SCL DS1621 Envía la señal de reloj al DS1621 a través del protocolo I2C.
RC4 23 SDA DS1621 Envía y recibe los datos del DS1621 a través del protocolo I2C.
RC5 24 motor_T1 Junto con RB7, este pin se enlaza con el L293D para controlar el giro o parada del motor – reductor.
RC6 25 TXD Este pin se conecta al FT232BM para enviar los resultados a la computadora.
RC7 26 RXD Se conecta al FT232BM para recibir instrucciones de la computadora.
RD0 19 RD1 20 RD2 21 RD3 22
LCD_DATOS Estos pines, se comunican al bus de datos del exhibidor.
RD4 27 RD5 28 RD6 29
LCD_CTRL Estos pines controlan las funciones ENABLE, R/W’ y RS del exhibidor.
RE0 8 Bomba Enciende o paga la bomba sumergible.
Tabla 3.2.- PIC18F452. Distribución de Componentes. 3.4.8 Fuente de Alimentación Los circuitos integrados que controlan el medidor de viscosidad requieren voltajes de corriente directa para realizar sus funciones. Por ello, es necesario diseñar una fuente de alimentación regulada que tenga las características siguientes:
36
- Voltajes de salidas de 5V y 13V
Acorde a las características eléctricas de los circuitos integrados anteriormente descritos, se requiere un voltaje de alimentación de 5V regulados. Además, es necesario diseñar una fuente que proporcione un voltaje de 13V para alimentar el motor y el electroimán.
- Corriente de 1ª
El electroimán y el motor – reductor son elementos que demandan una corriente mayor que otros dispositivos (PIC, FT232BM, etc.). Es por ello que la fuente de alimentación debe suministrar la corriente suficiente para que todos estos elementos puedan trabajar al mismo tiempo.
3.4.8.1 Transformador Es necesario reducir el voltaje que suministra la red (120V) a un voltaje menor. Para lograr lo anterior se usan transformadores, los cuales tienen dos funciones básicas: proporcionar aislamiento galvánico y reducir (o aumentar) las tensiones y corrientes variables en el tiempo. Las características del transformador dependerán de las especificaciones del voltaje y corriente requeridos por el circuito eléctrico (5V y 13V) y por los parámetros del regulador empleado. Por tanto, las características del transformador son:
- Corriente: 1A. - Voltaje: 36V. - Derivación central.
3.4.8.2 Rectificador Para convertir la señal alterna del transformador a una señal con una componente continua se emplean los rectificadores. La configuración en puente utiliza cuatro diodos, lo que permite obtener una señal de onda completa en la carga con un valor pico igual al voltaje pico del secundario. Además, la corriente eficaz que entrega a la salida es la misma que proporciona el transformador durante el semiciclo positivo y es inversa durante el semiciclo negativo. Para seleccionar el diodo adecuado, se deben considerar 2 aspectos: - Corriente promedio (IAV): 1A - Voltaje pico inverso (VRRM) ≥ Vsalida

37
3.4.8.3 Regulador La serie de reguladores LM2575 son circuitos integrados que proveen todas las funciones de un regulador tipo reductor, capaz de controlar una carga de 1A con linealidad excelente y regulación en la carga. Están disponibles en salidas de voltajes fijos de 3.3V, 5V, 12V, 15V y una versión de salida ajustable. Este tipo de reguladores requieren un número mínimo de componentes externos. Además, son simples de usar e incluyen un compensador de frecuencia interno y un oscilador de frecuencia fijo. La serie ofrece un reemplazo eficiente de los reguladores lineales de tres terminales, lo cual reduce sustancialmente el tamaño del disipador, y en muchos casos no se requiere. Otras características que incluyen estos reguladores son: garantizar una tolerancia del 4% en el voltaje de salida (tomando en cuenta las especificaciones para el voltaje de entrada y las condiciones de salida en la carga) y una frecuencia del oscilador del 10%. El conmutador de salida incluye un limitador de corriente ciclo por ciclo así como un apagado térmico para una protección completa bajo condiciones típicas. 3.4.9 Análisis de información mediante una computadora personal Una vez que se cuenta con el circuito diseñado para enviar todos los datos hacia una computadora es necesario desplegarlos mediante algún programa los cuales se desarrollan mediante lenguajes de programación. Basic es uno de los lenguajes más sencillos de utilizar, ya que requiere pocas instrucciones para ejecutar alguna tarea. Utilizando la aplicación Visual Basic (versión 6.0), se desarrolló el programa que se muestra en la figura 3.24, la cual recibe el nombre de ViscoSteel 1.0, el cual tiene las funciones siguientes: 1. Recibe los datos provenientes del microcontrolador (PIC18F452):
Esta aplicación ofrece la posibilidad de seleccionar el puerto COM al cual se encuentra conectado el equipo. Cuando el cable USB se conecta a la PC, el sistema le asigna un número al puerto USB – serie virtual, el cual puede visualizarse dentro del administrador de dispositivos en la sección de dispositivos COM y LPT. Se configura con los parámetros fijos siguientes: Bits por segundo: 9600 Bits de datos: 8 Paridad: Ninguno Bit de parada: 1 Estos mismos parámetros se establecen para el microcontrolador.
2. Una vez que se reciben los resultados del viscosímetro, estos pueden guardarse a través
de archivos con extensión st1. Además, es posible abrir/guardar/modificar/imprimir estos mismos archivos con esta aplicación.

38
3. Realiza los cálculos siguientes:
- Cálculo de la viscosidad dinámica o cinemática para cada una de las lecturas. - Conversión de unidades:
a) Viscosidad dinámica (Kg
m s⋅, poises y centipoises)
b) Viscosidad cinemática (2m
s, stokes y centistokes)
- Cálculo de la densidad de la bola y de la sustancia a prueba. 4. En el caso de realizar las pruebas con una temperatura constante, calcula la media y la
desviación estándar de las pruebas. 5. Grafica los resultados obtenidos durante las mediciones hechas con el viscosímetro:
Una vez que se reciben los resultados, la aplicación permite representar en una gráfica poligonal, la temperatura (°C, °F o °K) y la viscosidad (dinámica o cinemática) para cada una de ellas.
6. Permite exportar los resultados a Microsoft Excel.
Figura 3.24.- Aplicación ViscoSteel 1.0.

39
Capítulo 4 Caracterización del Viscosímetro De acuerdo al capítulo 2, para poder realizar las mediciones correspondientes, es necesario calibrar el equipo. Tomando en cuenta la expresión que define el funcionamiento del viscosímetro:
( )1 2K tη ρ ρ= ⋅ − ⋅
Es necesario determinar la constante de la bola en función de su masa y diámetro, para un fluido conocido. Los fluidos que mediremos son los siguientes:
Calibración Agua Prueba Aditivo sintético para gasolina
Tabla 4.1.- Fluidos. Calibración y prueba.
4.1 CALIBRACIÓN: AGUA Las condiciones para calibrar la bola con agua son las siguientes:
- Utilizar agua destilada. - Temperatura de calibración: 20 °C
4.1.1 Parámetros de la bola
2.7
4.25balín
balín
m gr
r mm
==
( )
( )
3
33 7 3
4
34
4.25 10 3.216 103
balín balín
balín
V r
V m m
π
π − −
= ⋅ ⋅
= ⋅ ⋅ × = ×
33
1 7 3 3
2.7 108.397 10
3.216 10
balínbalín
balín
balín
mD
V
Kg KgD
m mρ
−
−
=
×= = = ××

40
4.1.2 Resultados
Tiempo
T(°C) No. Prueba t(s) T(ms) T(µs)
1 0 690 189 2 0 689 189 3 0 688 220 4 0 687 189 5 0 688 220 6 0 689 189 7 0 688 189 8 0 688 189 9 0 689 192 10 0 689 189
20
T promedio 0 688.5 195.5
Tabla 4.2.- Agua. Resultados. Para obtener el tiempo total, se sumaron los tiempos promedio (segundos, milisegundos y microsegundos), de la tabla 4.2 se tiene:
3 60 688.5 10 195.5 10 0.688695t s ms s sµ− −= + × + × = Sustituyendo los resultados en la ecuación de la constante de la bola se obtiene:
( )1 2
Kt
ηρ ρ
=− ⋅
32
72
33 3
1 101.962987 10
8.397 10 1000 0.688695
kg
mm sKkg kg s
sm m
−
−×
⋅= = × × − ⋅
Una vez obtenida la constante, podemos calcular la viscosidad de otro fluido de una viscosidad similar.

41
4.2 PRUEBA: ADITIVO PARA GASOLINA Es un aditivo detergente para ser usado con la gasolina automotriz, diseñado para realizar funciones de limpieza ligera en autos con carburador y con inyectores que requieren una atomización adecuada de la mezcla de gasolina y aire. Disuelve gradualmente los depósitos originados por la gasolina y forma una capa protectora que evita la deposición de nuevos contaminantes. El fabricante ofrece el valor de la viscosidad cinemática en centistokes a 40°C. Es necesario realizar la conversión de unidades, tomando en cuenta la densidad del aditivo:
22 3
2
15.3 765
20
m gr Kg
V mL mρ = = =
Multiplicando la densidad del aditivo por su viscosidad cinemática, se obtiene la viscosidad
dinámica esperada:
( ) 42 3
765 0.0118 9.027 10 Kg Kg
Stm m s
η ρ µ − = ⋅ = ⋅ = × ⋅
Temperatura
( )C° Densidad
3
kg
m
Viscosidad Cinemática (cSt)
Viscosidad Dinámica kg
m s
⋅
40 °C 765 1.18 -49.027 10×
Tabla 4.3.- Propiedades físicas del aditivo. Unidades SI. 4.2.1 Parámetros de la bola
2.7
4balín
balín
m gr
r mm
==
( )
( )
3
33 7 3
4
34
4 10 2.681 103
balín balín
balín
V r
V m m
π
π − −
= ⋅ ⋅
= ⋅ ⋅ × = ×

42
4.2.2 Resultados
Tiempo
T(°C) No. Prueba t(s) t(ms) T(µs)
1 0 596 189 2 0 594 220 3 0 592 189 4 0 592 189 5 0 597 189 6 0 596 189 7 0 594 189 8 0 596 189 9 0 595 189 10 0 597 189
40
T promedio 0 594.9 192.1
Tabla 4.4.- Aditivo. Resultados.
3 60 594.9 10 192.1 10 0.5950921t s ms s sµ− −= + × + × =
( )1 2K tη ρ ρ= ⋅ − ⋅
2
7 3 42 3 3
1.962987 10 8.397 10 765 0.5950921 8.91538 10 m kg kg Kg
ss m m m s
η − − = × ⋅ × − ⋅ = × ⋅
Para calcular el error relativo, se sustituye el resultado en la expresión siguiente:
4 4
4
8.91538 10 9.027 10100 1.25%
9.027 10
Kg Kg
m s m sErrorKg
m s
− −
−
× − ×⋅ ⋅= ⋅ = −×
⋅
43
Conclusiones Los medidores de viscosidad son una excelente herramienta para el análisis de fluidos dentro de la industria y en el proceso de investigación. Sin embargo, cualquier instrumento de medición debe incluir módulos que le permitan procesar la información obtenida con él. A través de este trabajo se logró incorporar nuevas características al modelo tradicional de viscosímetro de bola que le permiten ser más novedoso y funcional frente a otros instrumentos que existen en el mercado. En las pruebas realizadas se observó que los resultados no fueron iguales para cada prueba. Esto se debe principalmente a que el diámetro interno del tubo no es el mismo que el de la bola, lo cual genera un movimiento errático en su trayectoria y por tanto tarda más tiempo en caer. Otro factor a tomar en cuenta es la presencia de pequeñas burbujas que pueden variar la velocidad de la bola. Para evitar su efecto durante las pruebas fue necesario retrasar el inicio en cada prueba para permitir que todo el aire dentro del tubo se elevara antes de liberar la bola. Existen otros parámetros de diseño que deben tomarse en cuenta para futuros diseños:
- Al realizar pruebas en el control de temperatura (superior a 90 °C) comenzó a deformarse el empaque de la bomba dentro del depósito de acero. Esto puede mejorarse implementando una bomba externa cuyas aspas sean de un material que resista altas temperaturas. Sin embargo, es necesario considerar el costo y la aplicación de este sistema.
- A pesar de la resistencia del material con el cual fue fabricado el tubo, éste puede
romperse cuando las pruebas se realizan sin un fluido dentro del tubo.
- Mejorando la programación del microcontrolador es posible integrar las funciones de cálculo de viscosidad y constante de calibración para ser desplegados en el exhibidor.
Finalmente, es posible mejorar la calidad de este proyecto añadiendo nuevas funciones que le permita incrementar su alcance en el estudio de la viscosidad de fluidos. Por ejemplo, emplear sensores magnéticos para que la detección de la bola no dependa de la luz que atraviese el fluido sino únicamente de la bola, logrando con ello medir sustancias transparentes y opacas. Otra característica a tomar en cuenta, es el control del viscosímetro a través de la red, lo que permitiría realizar mediciones a distancia.
44
Bibliografía
Capítulo 1
Páginas en internet
http://www.rheotec.de/en/?doc=products-index http://www.ictsl.net/productos/index_v.html http://www.martechnic.com/eng/testing/viscosity_check_fb.php http://www.masso.com/content/view/245/564/lang,es/ http://www.widman.biz/Seleccion/Viscosidad/viscosidad.html Capítulo 2
Libros
POTTER, Merle C.; WIGGERT, David C.; HONDZO, Midhat. Mecánica de Fluidos. 2ª. Edición. México, Prentice Hall; 2002. FERNANDEZ LARRAÑAGA, Bonifacio. Introducción a la Mecánica de Fluidos. 2ª. Edición. México, Alfa Omega; 1999. MUNSON, Bruce Roy; YOUNG, Donald F.; OKIISHI, Theodore H. Fundamentos de Mecánica de Fluidos. 1ª. Edición. México, Limusa; 1999. FAY, James A. Mecánica de Fluidos. 1ª. Edición. México, CECSA; 1996. BARRIOS CARRADA, Gerardo; VALDEZ BADILLO, Delia. Informe Técnico Final: “Construcción de un Viscosímetro para Análisis de Sangre”. Unidad Profesional Interdisciplinaria de Biotecnología. IPN. 2002.
45
Capítulo 3
Libros
PALACIOS MUNICIPIO, Enrique; REMIRO DOMÍNGUEZ, Fernando; LOPEZ PEREZ, Lucas J. Microcontrolador 16F84 Desarrollo de Proyectos. 2ª. Edición. México, Alfa Omega; 2006. TORRES PORTERO, Manuel; TORRES PORTERO, Miguel Ángel. Diseño e ingeniería electrónica asistida con Protel DXP. 1ª. Edición. México, Alfa Omega; 2005. COUGHLIN, Robert F.; DRISCOLL, Frederick F. Amplificadores Operacionales y Circuitos Integrados Lineales. 5ª. Edición. México, Prentice Hall; 1999. RODRIGUEZ BUCARELLY, Carlos M.; RODRIGUEZ BUCARELLY, Pablo A. Visual Basic 6.0 Como si estuviera en primero. 1ª. Edición. 1999. Páginas de internet
- Visual Basic. Cuadros de diálogo http://www.recursosvisualbasic.com.ar/htm/tutoriales/cuadros-de-dialogo-enlaces.htm - Visual Basic. Estudio de Gráficos http://www.todopic.com.ar/foros/index.php?topic=16233.0 - Visual Basic. Comunicación RS232 http://www.todopic.com.ar/foros/index.php?topic=7013.0 - El USB http://usuarios.lycos.es/kurganz/ - Especificaciones del Bus I2C http://www.nxp.com/acrobat_download/literature/9398/39340011.pdf - Controladores del FT232BM http://www.ftdichip.com/Drivers/VCP.htm
46
Datasheets
AND731 Display de Cristal Líquido L293D Excitador de 4 canales IR383 Led infrarrojo PT1302BC Fototransistor PIC18F452 Microcontrolador FT232BM Convertidor USB – Serial MOC3041 Fotoacoplador BTA41 Triac BT137 Triac DS1621 Sensor de temperatura y termostato

47
Anexos ANEXO 1 CÁLCULOS ELÉCTRICOS Detectores de Bola (BC547C) El tipo de configuración empleada para este transistor es a emisor común. Para calcular el valor de la resistencia en el colector (R2), se emplea la expresión siguiente:
( 1) ( 2)2
CC CE F D F D
F
V V V VR
I
− − −=
2
5 0.2 1.7930.1 27
100
V V VR
mA
− −= = Ω ≈ Ω
Para calcular el valor de la resistencia en la base (R1), es necesario conocer IB. Se sustituye en la expresión siguiente:
CB
II
β=
100
0.8120B
mAI mA= =
1
5 0.95125 4.7
0.8CC BE
B
V V V VR K
I mA
− −= = = Ω ≈ Ω
(PT1302BC) A diferencia de los transistores, la conexión de un fototransistor solo requiere del cálculo de la resistencia conectada al colector. Para ello, el fabricante proporciona los datos siguientes:
1
0.2C
CE
I mA
V V
==
3
5 0.24800 4.7
1CC CE
C
V V V VR K
I mA
− −= = = Ω ≈ Ω
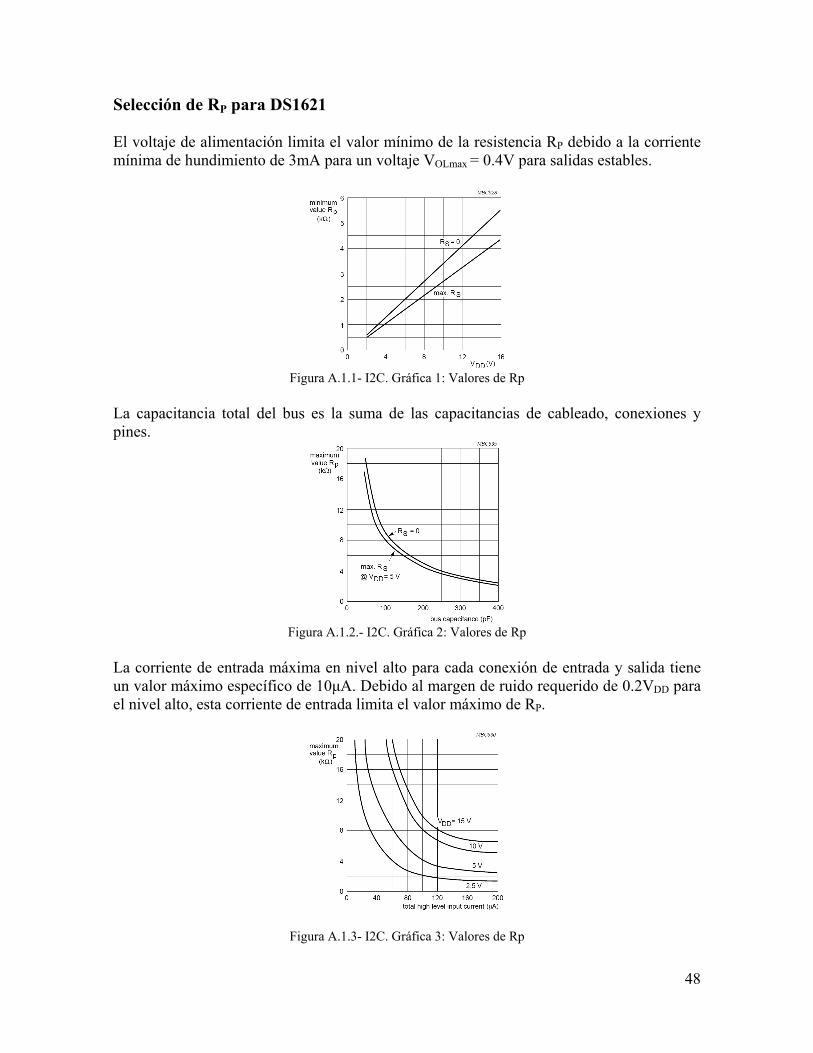
48
Selección de RP para DS1621 El voltaje de alimentación limita el valor mínimo de la resistencia RP debido a la corriente mínima de hundimiento de 3mA para un voltaje VOLmax = 0.4V para salidas estables.
Figura A.1.1- I2C. Gráfica 1: Valores de Rp
La capacitancia total del bus es la suma de las capacitancias de cableado, conexiones y pines.
Figura A.1.2.- I2C. Gráfica 2: Valores de Rp
La corriente de entrada máxima en nivel alto para cada conexión de entrada y salida tiene un valor máximo específico de 10µA. Debido al margen de ruido requerido de 0.2VDD para el nivel alto, esta corriente de entrada limita el valor máximo de RP.
Figura A.1.3- I2C. Gráfica 3: Valores de Rp

49
Fuente de alimentación de 5V (LM2575)
5OUTV V=
( ) ( ) secundario. 18 2 1.4 24.05IN puente rectificadorpV Máx V V V V V= − = ⋅ − =
Selección de inductor (L1)
Selecciona el valor del inductor correcto de la figura siguiente:
Figura A.1.4.- LM2575. Selección del inductor para regulador de 5 V. Como puede verse la intersección de la corriente máxima de carga (1A) y el voltaje de entrada máximo (24.05V) dan como resultado: 1 330L Hµ=
Selección del Capacitor de Salida (C1OUT)
Para una operación estable y un voltaje rizo de salida aceptable (aproximadamente 1% del voltaje de salida), se recomienda un valor entre 100µF y 470µF. El voltaje del capacitor debe ser al menos 1.5 veces más grande que el voltaje de salida. 1 220OUTC Fµ= @ 25V
Selección del Diodo (D1)
El valor de la corriente del diodo debe ser al menos 1.2 veces más grande que la corriente máxima de la carga. Además, si el diseño de la fuente de alimentación debe oponerse a una salida en corto, el diodo debería tener un valor de corriente igual a la máxima corriente del

50
LM2575. El valor del voltaje inverso del diodo debe ser al menos 1.25 veces el voltaje de entrada máximo. 1 488D NTE=
Capacitor de Entrada (C1IN)
Se requiere un capacitor electrolítico de aluminio o tantalio localizado cerca del regulador para una operación estable. 1 100INC Fµ= @ 63V
Fuente de alimentación de 13V (LM2575)
13OUTV V=
( ) ( ) secundario. 36 2 1.4 49.5IN puente rectificadorpV Máx V V V V V= − = ⋅ − =
52F KHz=
Voltaje de salida Programado (VOUT)
Se debe seleccionar el valor de R1 y R2. Para ello, se debe usar la siguiente expresión para seleccionar el valor de resistencia apropiado.
1
2
1OUT REF
RV V
R
= ⋅ +
1.23REFV V=
1 1R K= Ω
2 1
131 1 1 9.57
1.23OUT
REF
V VR R K K
V V
= ⋅ − = Ω⋅ − = Ω
Selección del Inductor (L2)
Se debe calcular la constante E T⋅ (volt · µs) a partir de la expresión siguiente:
( ) ( )1000 OUT
IN OUT
IN
VE T V V volts s
V Fµ
⋅ = − ⋅ ⋅ ⋅
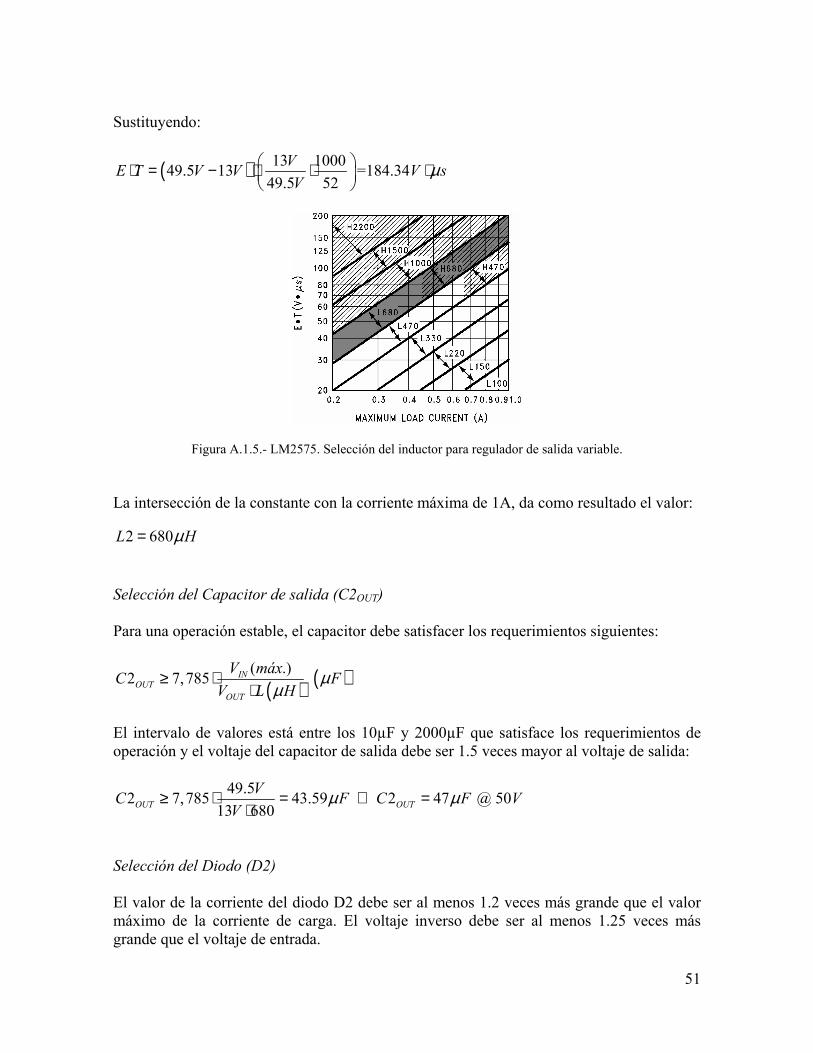
51
Sustituyendo:
( ) 13 100049.5 13 =184.34
49.5 52
VE T V V V s
Vµ ⋅ = − ⋅ ⋅ ⋅
Figura A.1.5.- LM2575. Selección del inductor para regulador de salida variable. La intersección de la constante con la corriente máxima de 1A, da como resultado el valor:
2 680L Hµ=
Selección del Capacitor de salida (C2OUT)
Para una operación estable, el capacitor debe satisfacer los requerimientos siguientes:
( ) ( )( .)2 7,785 INOUT
OUT
V máxC F
V L Hµ
µ≥ ⋅
⋅
El intervalo de valores está entre los 10µF y 2000µF que satisface los requerimientos de operación y el voltaje del capacitor de salida debe ser 1.5 veces mayor al voltaje de salida:
49.52 7,785 43.59 2 47 @ 50
13 680OUT OUT
VC F C F V
Vµ µ≥ ⋅ = ∴ =
⋅
Selección del Diodo (D2)
El valor de la corriente del diodo D2 debe ser al menos 1.2 veces más grande que el valor máximo de la corriente de carga. El voltaje inverso debe ser al menos 1.25 veces más grande que el voltaje de entrada.

52
2 488D NTE= Capacitor de Entrada (C2IN)
Se requiere un capacitor electrolítico de aluminio o tantalio localizado cerca del regulador para una operación estable. 2 100INC Fµ= @ 63V
Diseño de inductores
La expresión para el cálculo de bobinas a partir de sus dimensiones y entrehierro es la siguiente:
810
1.257C
C
L LN
Aµ⋅ ⋅=
⋅ ⋅
Donde: N Número de espiras de la bobina AC Sección transversal del núcleo (cm2) LC longitud de la bobina (cm) µ Permeabilidad magnética del núcleo (ferrita)
( )22 20.2 0.125CA r cm cmπ π= ⋅ = ⋅ =
0.7CL cm=
10µ =
Para 1 300L Hµ=
8 8
2
10 330 0.7 10121.25
1.257 1.257 10 0.125C
C
L L H cmN vueltas
A cm
µµ
⋅ ⋅ ⋅ ⋅= = =⋅ ⋅ ⋅ ⋅
2 680L Hµ=

53
8 8
2
10 680 0.7 10174.04
1.257 1.257 10 0.125C
C
L L H cmN vueltas
A cm
µµ
⋅ ⋅ ⋅ ⋅= = =⋅ ⋅ ⋅ ⋅
Control de potencia todo o nada Éste control limita el número de ciclos que pasan a través de la carga. Para un voltaje sinusoidal de entrada:
( ) 2 ( )s m sV V sen t V sen tω ω= ⋅ = ⋅ ⋅
El voltaje de entrada se conecta con la carga durante n ciclos y se desconecta durante m ciclos (figura 3.15). El voltaje rms de salida se puede determinar de la forma siguiente:
( ) ( ) ( )2
2 20
0
22 S S S
n nV V sen t d t V V k
n m n m
π
ω ωπ
= ⋅ ⋅ = ⋅ =⋅ + +∫
Donde k se llama ciclo de trabajo. Fotoacoplador (MOC3041) Este circuito emplea una resistencia conectada en serie al diodo interno (R1), para la cual se considera el voltaje de polarización del emisor infrarrojo interno que va del pin 1 al 2, así como la corriente necesaria para que emita la luz apropiada para activar el fototriac:
51
5 1.3246.66 220
15RA F
F
V V V VR
I mA
− −= = = Ω ≈ Ω
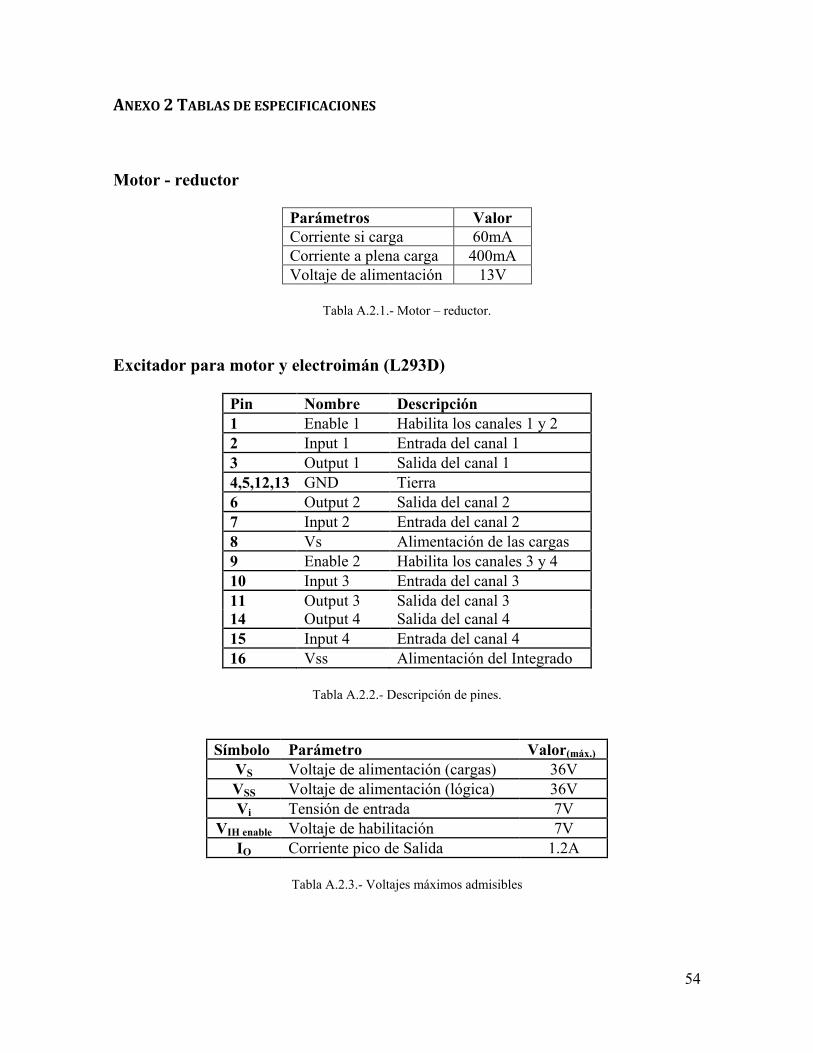
54
ANEXO 2 TABLAS DE ESPECIFICACIONES Motor - reductor
Parámetros Valor Corriente si carga 60mA Corriente a plena carga 400mA Voltaje de alimentación 13V
Tabla A.2.1.- Motor – reductor.
Excitador para motor y electroimán (L293D)
Pin Nombre Descripción 1 Enable 1 Habilita los canales 1 y 2 2 Input 1 Entrada del canal 1 3 Output 1 Salida del canal 1 4,5,12,13 GND Tierra 6 Output 2 Salida del canal 2 7 Input 2 Entrada del canal 2 8 Vs Alimentación de las cargas 9 Enable 2 Habilita los canales 3 y 4 10 Input 3 Entrada del canal 3 11 Output 3 Salida del canal 3 14 Output 4 Salida del canal 4 15 Input 4 Entrada del canal 4 16 Vss Alimentación del Integrado
Tabla A.2.2.- Descripción de pines.
Símbolo Parámetro Valor(máx.) VS Voltaje de alimentación (cargas) 36V VSS Voltaje de alimentación (lógica) 36V Vi Tensión de entrada 7V
VIH enable Voltaje de habilitación 7V IO Corriente pico de Salida 1.2A
Tabla A.2.3.- Voltajes máximos admisibles
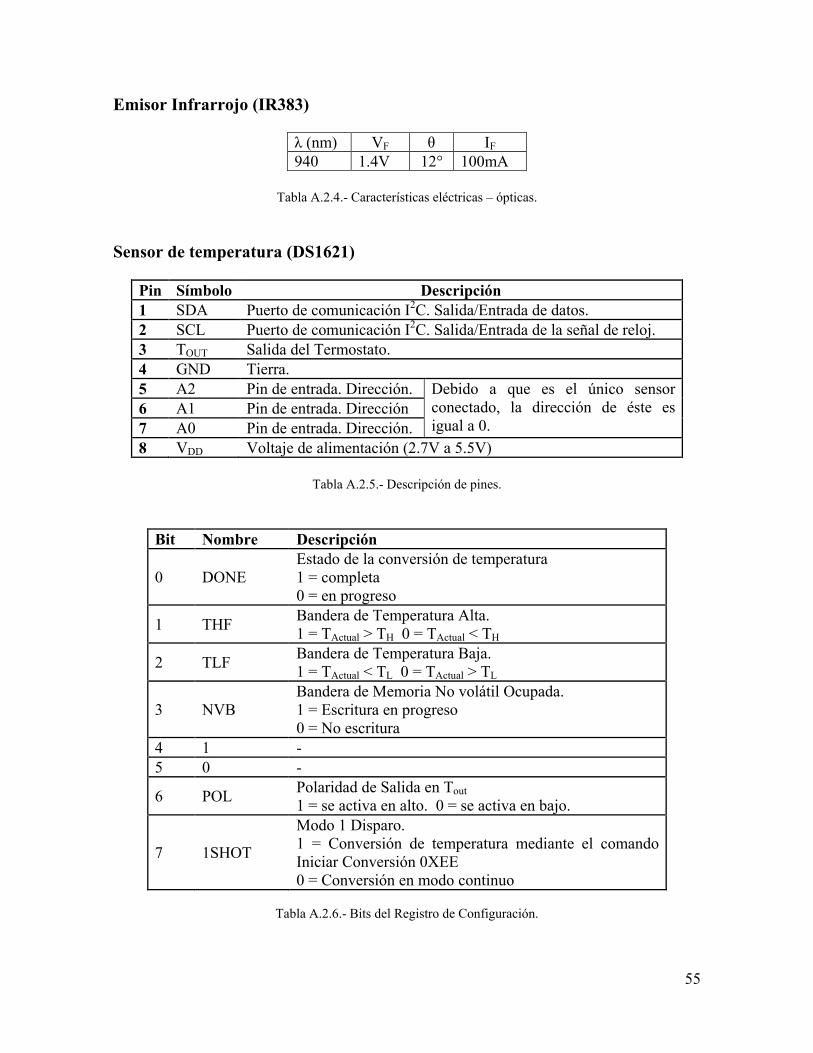
55
Emisor Infrarrojo (IR383)
λ (nm) VF θ IF 940 1.4V 12° 100mA
Tabla A.2.4.- Características eléctricas – ópticas.
Sensor de temperatura (DS1621)
Pin Símbolo Descripción 1 SDA Puerto de comunicación I2C. Salida/Entrada de datos. 2 SCL Puerto de comunicación I2C. Salida/Entrada de la señal de reloj. 3 TOUT Salida del Termostato. 4 GND Tierra. 5 A2 Pin de entrada. Dirección. 6 A1 Pin de entrada. Dirección 7 A0 Pin de entrada. Dirección.
Debido a que es el único sensor conectado, la dirección de éste es igual a 0.
8 VDD Voltaje de alimentación (2.7V a 5.5V)
Tabla A.2.5.- Descripción de pines.
Bit Nombre Descripción
0 DONE Estado de la conversión de temperatura 1 = completa 0 = en progreso
1 THF Bandera de Temperatura Alta. 1 = TActual > TH 0 = TActual < TH
2 TLF Bandera de Temperatura Baja. 1 = TActual < TL 0 = TActual > TL
3 NVB Bandera de Memoria No volátil Ocupada. 1 = Escritura en progreso 0 = No escritura
4 1 - 5 0 -
6 POL Polaridad de Salida en Tout 1 = se activa en alto. 0 = se activa en bajo.
7 1SHOT
Modo 1 Disparo. 1 = Conversión de temperatura mediante el comando Iniciar Conversión 0XEE 0 = Conversión en modo continuo
Tabla A.2.6.- Bits del Registro de Configuración.

56
Código Comando 0XAA Leer Temperatura 0XA1 Acceso a TH
0XA2 Acceso a TL 0XAC Acceso al Registro de Configuración 0XA8 Leer Contador 0XA9 Leer Acumulador 0XEE Iniciar Conversión 0X22 Detener Conversión
Tabla A.2.7.- Comandos.
Fotoacopladores (MOC3041)
Símbolo Parámetro Valor VF Voltaje de Polarización del led 1.5Vmáx.
VTM Voltaje Pico de encendido 3Vmáx.
IF Corriente 15mA VIH Voltaje Inhibidor 20Vmáx.
PD Potencia de Disipación 250mW máx.
Tabla A.2.8.- Características Eléctricas.
Exhibidor Alfanumérico (AND491)
Pin Nombre Descripción 1 Vss Tierra 2 VDD Voltaje de Alimentación 3 VO Voltaje de Operación (contraste) 4
RS “H” Entrada de datos “L” Entrada de comandos
5 R/W’ Lectura/Escritura 6 E Habilitación 7 DB0 Bit de datos 0 8 DB1 Bit de datos 1 9 DB2 Bit de datos 2 10 DB3 Bit de datos 3 11 DB4 Bit de datos 4 12 DB5 Bit de datos 5
Tabla A.2.9.- Descripción de pines
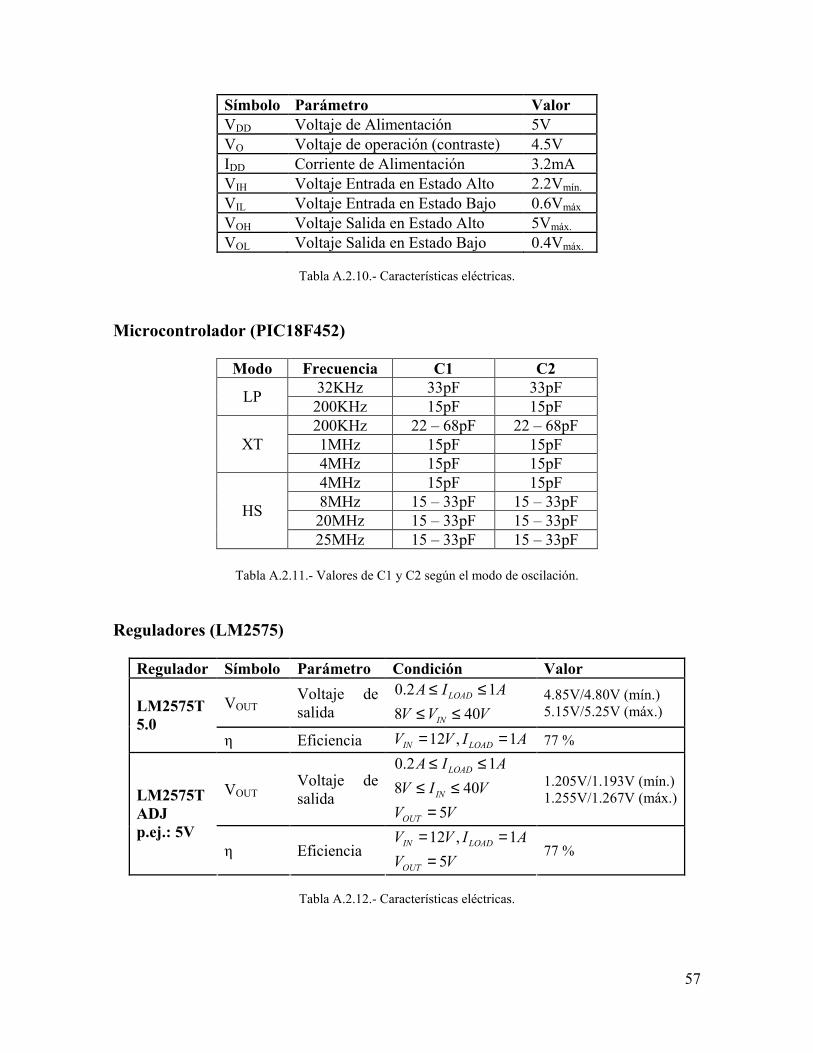
57
Símbolo Parámetro Valor VDD Voltaje de Alimentación 5V VO Voltaje de operación (contraste) 4.5V IDD Corriente de Alimentación 3.2mA VIH Voltaje Entrada en Estado Alto 2.2Vmín.
VIL Voltaje Entrada en Estado Bajo 0.6Vmáx
VOH Voltaje Salida en Estado Alto 5Vmáx.
VOL Voltaje Salida en Estado Bajo 0.4Vmáx.
Tabla A.2.10.- Características eléctricas.
Microcontrolador (PIC18F452)
Modo Frecuencia C1 C2 32KHz 33pF 33pF
LP 200KHz 15pF 15pF 200KHz 22 – 68pF 22 – 68pF 1MHz 15pF 15pF XT 4MHz 15pF 15pF 4MHz 15pF 15pF 8MHz 15 – 33pF 15 – 33pF 20MHz 15 – 33pF 15 – 33pF
HS
25MHz 15 – 33pF 15 – 33pF
Tabla A.2.11.- Valores de C1 y C2 según el modo de oscilación. Reguladores (LM2575)
Regulador Símbolo Parámetro Condición Valor
VOUT Voltaje de salida
0.2 1
8 40LOAD
IN
A I A
V V V
≤ ≤≤ ≤
4.85V/4.80V (mín.) 5.15V/5.25V (máx.) LM2575T
5.0 η Eficiencia 12 , 1IN LOADV V I A= = 77 %
VOUT Voltaje de salida
0.2 1
8 40
5
LOAD
IN
OUT
A I A
V I V
V V
≤ ≤≤ ≤
= 1.205V/1.193V (mín.)
1.255V/1.267V (máx.) LM2575T ADJ p.ej.: 5V
η Eficiencia 12 , 1
5IN LOAD
OUT
V V I A
V V
= ==
77 %
Tabla A.2.12.- Características eléctricas.

58
ANEXO 3 DIAGRAMAS ELÉCTRICOS Tarjeta Principal
RA0
2
RA1
3
RA2
4
RA3
5
RA4/
T0CKI
6
RA5/
SS7
RB0/INT
33
RB1
34
RB2
35
RB3
36
RB4
37
RB5
38
RB6
39
RB7
40
RC0/T
1OSI/T1C
KI
15
RC1/T
1OSO
16
RC2/C
CP1
17
RC3/S
CK/S
CL
18
RC4/S
DI/SDA
23
RC5/S
DO
24
RC6/T
X/C
K25
RC7/R
X/D
T26
RD0/
PSP0
19
RD1/
PSP1
20
RD2/
PSP2
21
RD3/
PSP3
22
RD4/
PSP4
27
RD5/
PSP5
28
RD6/
PSP6
29
RD7/
PSP7
30
RE0/
RD
8
RE1/W
R9
RE2/C
S10
VSS
12
VSS
31
MCLR/V
PP1
OSC
1/C
LKI
13
OSC
2/CLKO
14
VDD
11
VDD
32
U1PIC18F452
EN1
1
EN2
9
IN1
2
IN2
7
IN3
10
IN4
15OUT1
3
OUT2
6
OUT3
11
OUT4
14
VC
8VCC
16
GND
4
GND
5
GND
12
GND
13
U2L293D
+12
A1
K2
NC3
NC5
T26
T14
U4
MOC3041
A1
K 2
NC3
NC5
T26
T14
U5
MOC3041
R18 R24
R28 R19
R26
R27
R25
R13
R14
Q2 Q3
10nFC2
22pF
C3
22pF
C4
12
Y1XTAL
VCC
VCC
R15 R16 R17
on/off
1
GND
2
bomba
3
R4
LEDS
Vcc1
out2
GND3
TEMP
Vcc1
Gnd2
SDA3
SCL4
Tout5
C_DS1621
12
VAC
12
R
12
B
VCC
VCC
VCC
1 2 3 4
LCD_DATOS
1 2 3 4 5 6
LCD_CTRL
VCC
SCL DS1621
SDA DS1621
Tout
motor _T1
motor _T2
electroimán
calentador
Bomba
Ajuste
Led O
N/OFF
Led B
omba
Led C
alenta
dor
ON/O
FF
Ajuste
R21 R20
R10
R11
RESETON/OFF
SELECTENTER
P1P2
R23 R22
470R6
27
R1
27
R2
1.5K
R3
4.7KR4
10KR5
VCC
100nF
C1
33nF
C8
27pFC9
27pFC10
100nFC5
100nFC6
Y26 MHz
EESK1
EEDATA2
VCC
3
RESET#4
RSTOUT5
3V3OUT6
USBDP7
USBDM8
GND
9
SLEEP#10
RXLED11
TXLED12
VCC-IO
13
PWRCTL 14
PWREN# 15
TXDEN16
GND
17
RI#18
DCD#19
DSR#20
DTR# 21
CTS#22
RTS#23
RXD 24
TXD25V
CC
26
XTIN27
XTOUT28
AGND
29
AVCC
30
TEST31
EECS32
FT232BMU2
VCC
10uFC7
VCC
VCC
RXD
TXD
Q1BC547B
VCCR8
R9R12
R7
Sensor_1
Sensor_2leds_IR
Sens
or_2
Sens
or_1
Tout
SCL D
S162
1SD
A DS1
621
RXD
TXD
Led O
N/OFF
Led B
omba
Led C
alenta
dor
RESE
TSE
LECT
ENTE
R
P1 P2leds_
IR
Bomb
aCa
lentad
or
123
Z1
VCC+12
1234
USB_A
T1
electr
oimán
motor
_T1
motor
_T2
VCC
VCC12345
botones
VCC
VCC
1234567
tubo
1 2 3 4
cargas
Figura A.3.1.- Diagrama eléctrico

59
Figura A.3.2.- PCB. Botom Layer
Figura A.3.3.- PCB. Top Layer
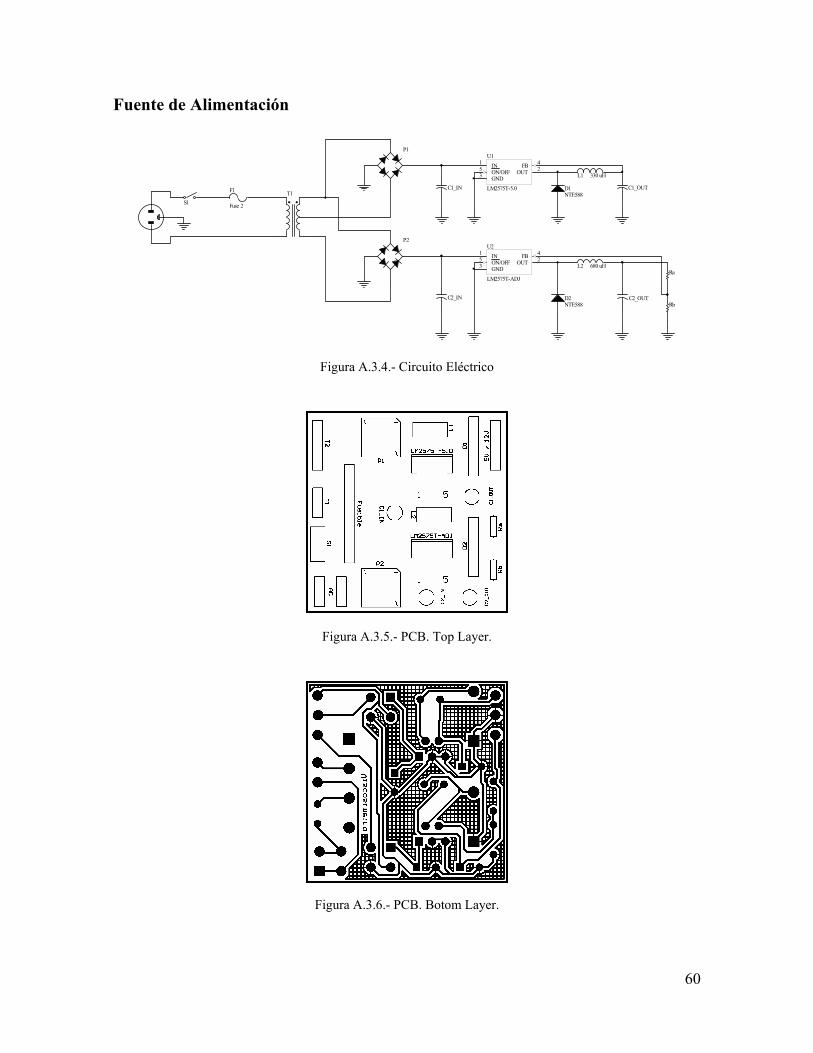
60
Fuente de Alimentación
FB4
ON/OFF5
GND3
IN1
OUT2
U1
LM2575T-5.0
FB4
ON/OFF5
GND3
IN1
OUT2
U2
LM2575T-ADJ
C1_IN
C2_IN
D1NTE588
D2NTE588
680 uHL2
330 uHL1
C1_OUT
C2_OUT
Ra
Rb
P1
P2
S1
F1
Fuse 2
T1
Figura A.3.4.- Circuito Eléctrico
Figura A.3.5.- PCB. Top Layer.
Figura A.3.6.- PCB. Botom Layer.

61
Tubo
Figura A.3.7.- Tubo. Conexiones.
rojo café
rojo negro
amarillo
blanco
amarillo
azul blanco
blanco
azul café
azul
azul
Vcc
Vcc
RB2
RB0
Vcc
RB3
verde
verde
blanco
blanco
Vcc
RB4
M
rojo
rojo
3
6
13
11
Tarjeta Tarjeta
L293D
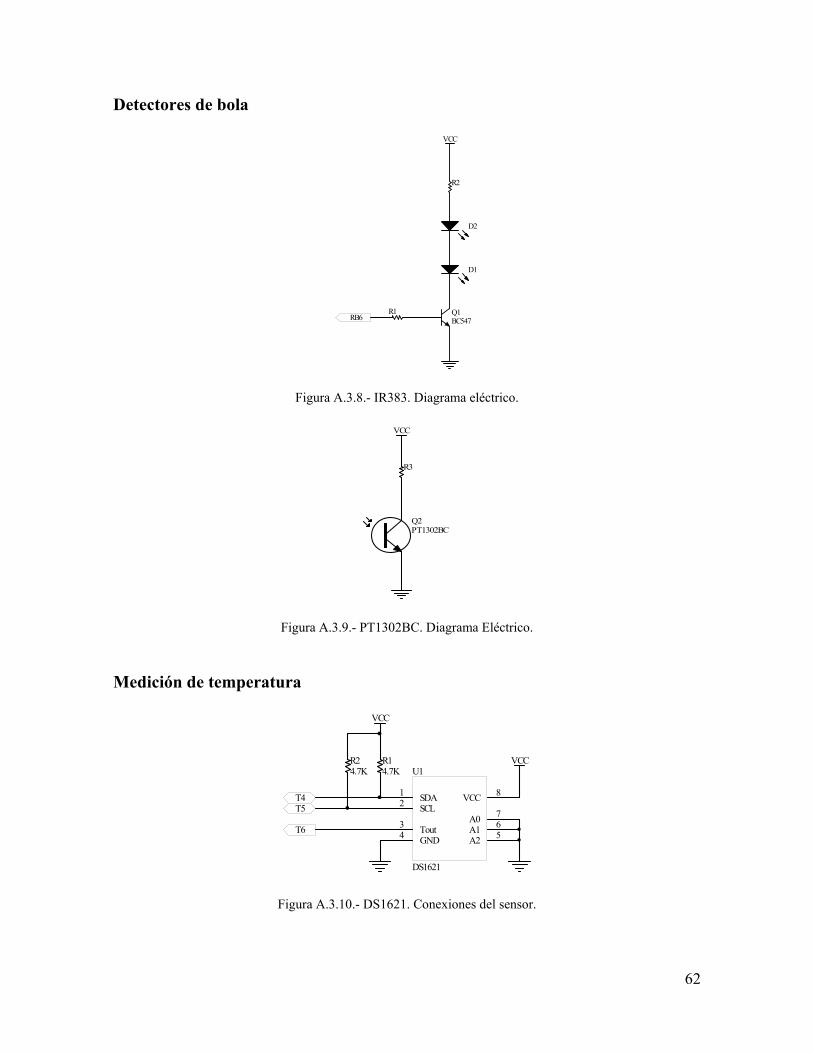
62
Detectores de bola
Q1BC547
R1
R2
D1
D2
VCC
RB6
Figura A.3.8.- IR383. Diagrama eléctrico.
Q2PT1302BC
R3
VCC
Figura A.3.9.- PT1302BC. Diagrama Eléctrico. Medición de temperatura
SDA1
SCL2
Tout3
GND4
A25
A16
A07
VCC8
U1
DS1621
VCC4.7KR1
4.7KR2
VCC
T4T5
T6
Figura A.3.10.- DS1621. Conexiones del sensor.
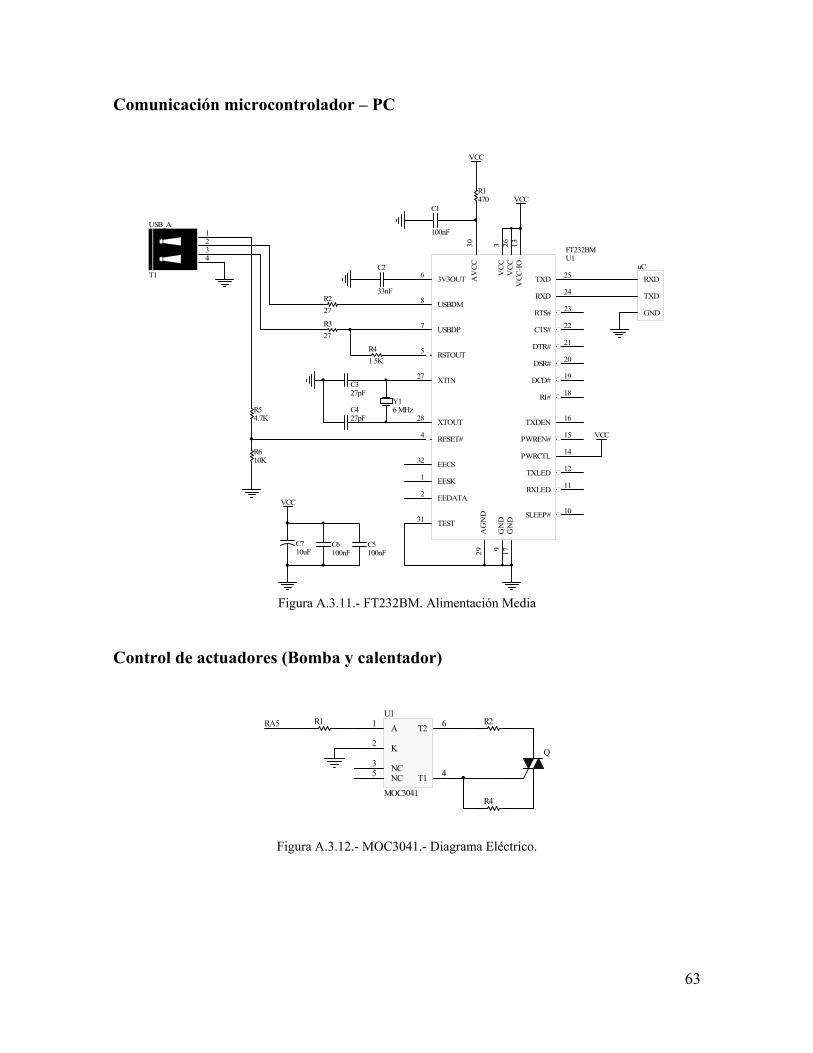
63
Comunicación microcontrolador – PC
470R1
27
R2
27
R3
1.5K
R4
4.7KR5
10KR6
VCC
100nF
C1
33nF
C2
27pFC3
27pFC4
100nFC5
100nFC6
Y16 MHz
EESK1
EEDATA2VCC
3
RESET#4
RSTOUT5
3V3OUT6
USBDP7
USBDM8
GND
9
SLEEP# 10
RXLED11
TXLED12
VCC-IO
13
PWRCTL14
PWREN#15
TXDEN16
GND
17
RI#18
DCD#19
DSR#20
DTR#21
CTS#22
RTS#23
RXD24
TXD25V
CC
26
XTIN27
XTOUT28
AGND
29AVCC
30
TEST31
EECS32
FT232BMU1
RXD
TXD
GND
uC
VCC
10uFC7
VCC
1234
USB_A
T1
VCC
Figura A.3.11.- FT232BM. Alimentación Media
Control de actuadores (Bomba y calentador)
A1
K2
NC3
NC5
T26
T14
U1
MOC3041
R1 R2
Q
R4
RA5
Figura A.3.12.- MOC3041.- Diagrama Eléctrico.
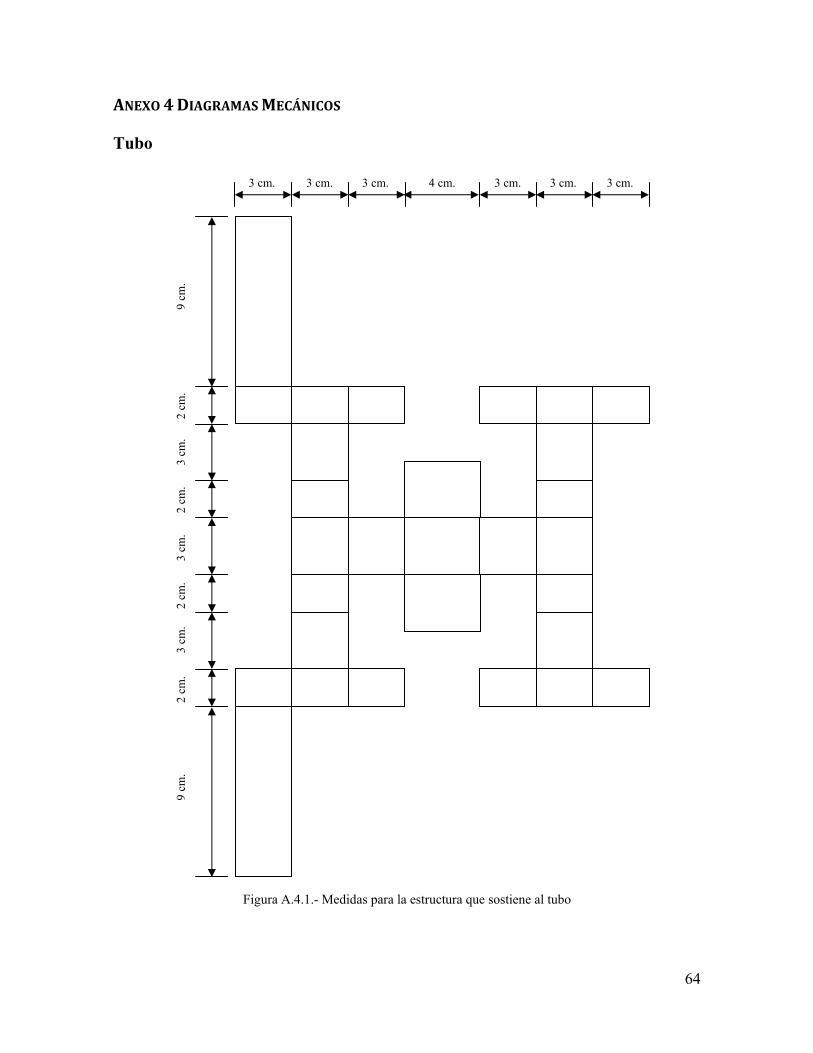
64
ANEXO 4 DIAGRAMAS MECÁNICOS Tubo
Figura A.4.1.- Medidas para la estructura que sostiene al tubo
3 cm. 3 cm. 3 cm. 4 cm. 3 cm. 3 cm. 3 cm. 9 cm
. 2 cm
. 3 cm
. 2 cm
. 3 cm
. 2 cm
. 3 cm
. 2 cm
. 9 cm
.
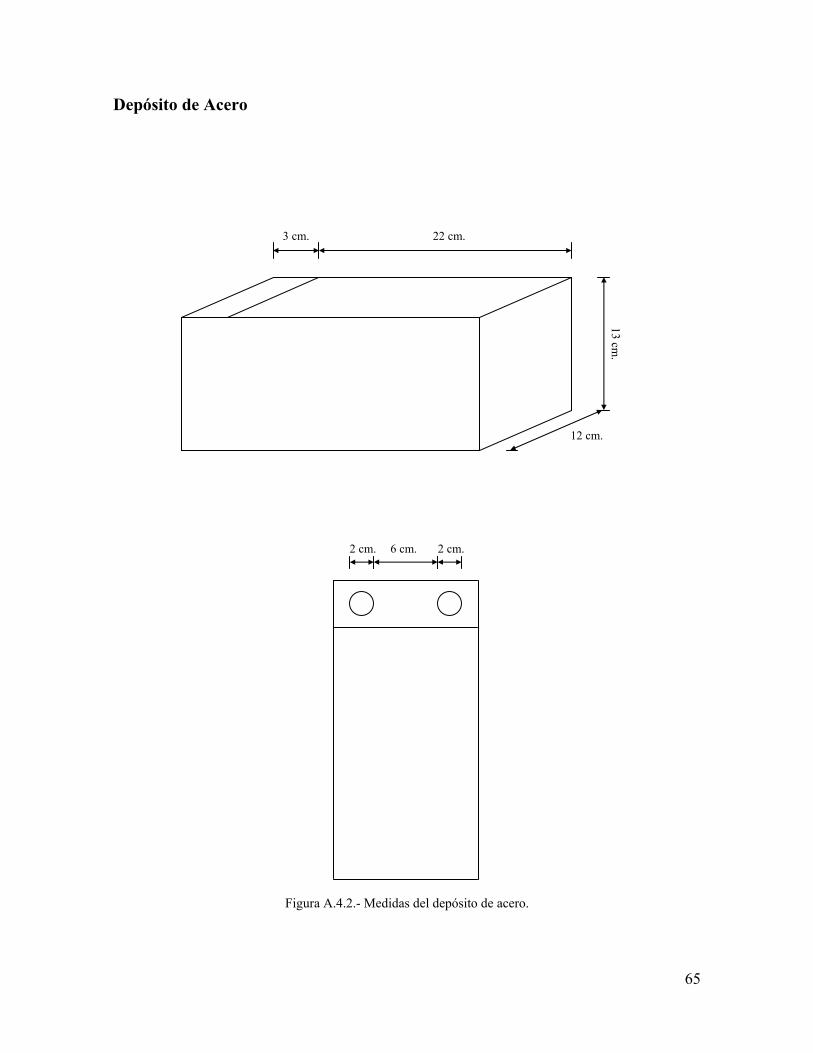
65
Depósito de Acero
Figura A.4.2.- Medidas del depósito de acero.
2 cm. 2 cm. 6 cm.
22 cm.
13 cm.
3 cm.
12 cm.

66
Soporte para Tubo
Figura A.4.3.- Medidas de la base.
3 cm. 11 cm. 9 cm.
26 cm.
2 cm. 2 cm.
0.55 cm.
2.4 cm.

67
Detectores de bola
Figura A.4.4.- IR383. Dimensiones.
Figura A.4.5.- PT1302BC. Dimensiones.
13.5
8.5±
0.3
2.54
1.0
4.6±0.2
0.5±0.1
(1) (2)
)
(1) Emisor (2) Colector
2
1
24.0
8.6±
0.3
2.54
1.0
1.1
5.0±0.2
1.0
68
ANEXO 5 FOTOGRAFÍAS
Figura A.5.1.- Electroimán.
Figura A.5.2.- Motor de CD con reductora

69
Figura A.5.3.- BTA41. Resistencia controlada por el triac.
Figura A.5.4.- BT137. Bomba sumergible controlada por el triac.

70
ANEXO 6 EQUIPO TERMINADO
Figura A.6.1.-Tubo contenedor.
Figura A.6.2.- Cuba de acero y Panel de control.
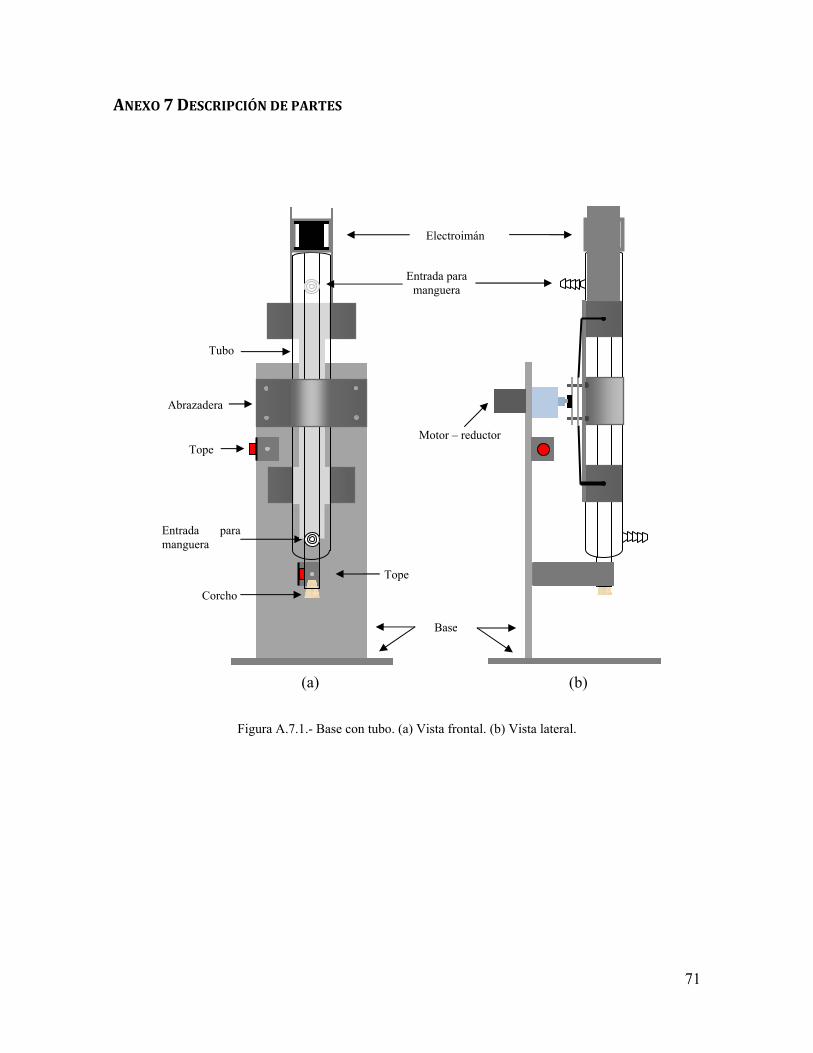
71
ANEXO 7 DESCRIPCIÓN DE PARTES
Figura A.7.1.- Base con tubo. (a) Vista frontal. (b) Vista lateral.
(a) (b)
Entrada para manguera
Motor – reductor
Electroimán
Abrazadera
Tubo Conten
Corcho
Entrada para manguera
Base
Tope
Tope
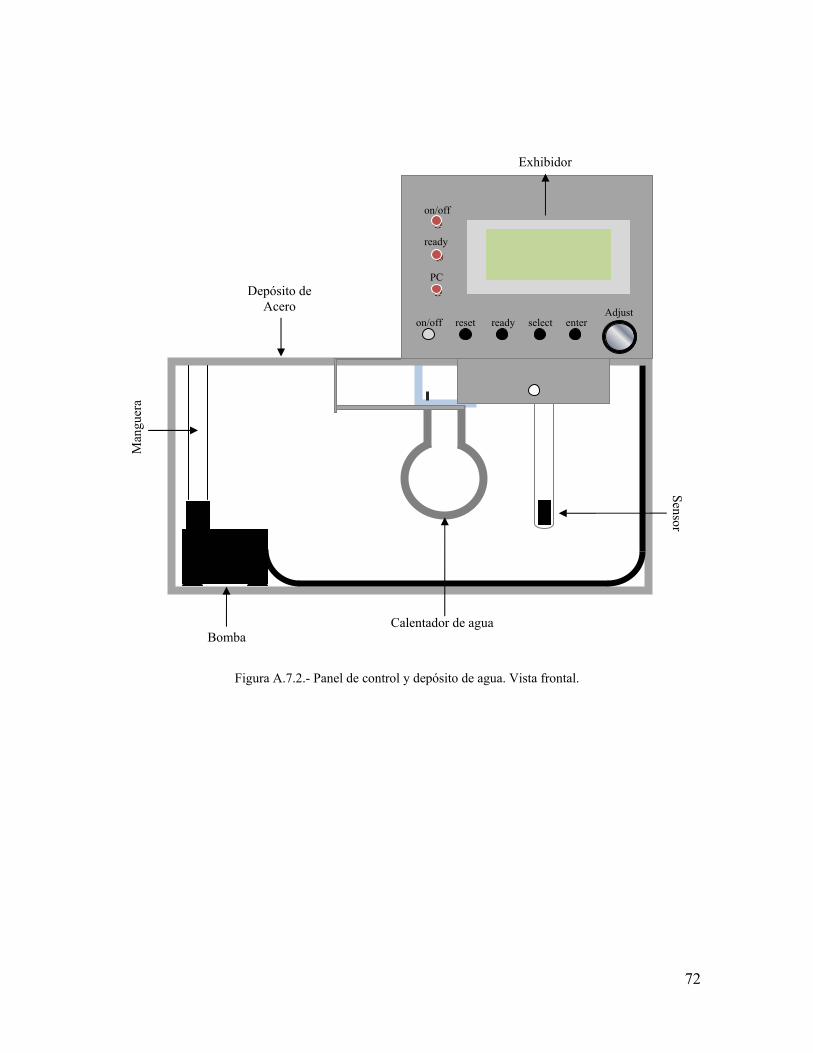
72
Figura A.7.2.- Panel de control y depósito de agua. Vista frontal.
on/off reset ready select enter Adjust
on/off
ready
PC
Exhibidor
Calentador de agua Bomba
Man
guera
Depósito de Acero
Sensor

73
ANEXO 8 ÍNDICE DE IMÁGENES Figura 1.1.- Comportamiento de un fluido viscoso................................................................ 2 Figura 1.2.- Viscosímetros capilares. a) Ostwald b) Ubbelohde c) De flujo inverso............. 4 Figura 1.3.- Ejemplo. Viscosímetro rotacional. ..................................................................... 6 Figura 1.4.- Ejemplo. Viscosímetro de caída de bola............................................................. 8 Figura 2.1.- Variación del coeficiente de arrastre en función del número de Reynolds para el caso de la esfera. ............................................................................................................... 10 Figura 2.2.- Cuerpo sumergido en un líquido....................................................................... 11 Figura 3.1.- Elementos que intervienen en la medición de la viscosidad............................. 14 Figura 3.2.- Tablero de programación. Interfaz con el usuario. ........................................... 14 Figura 3.3.- Circuito eléctrico propuesto.............................................................................. 15 Figura 3.4.- Programa para PC ............................................................................................. 15 Figura 3.5.- Sistema de control de temperatura.................................................................... 16 Figura 3.6.- Condensador Liebig. Diseño original. .............................................................. 18 Figura 3.7.- Tubo contenedor. Diseño modificado............................................................... 18 Figura 3.8.- Caída de la bola. ............................................................................................... 19 Figura 3.9.- Retorno de la bola ............................................................................................. 19 Figura 3.10.- Dimensiones de un electroimán...................................................................... 20 Figura 3.11.- Motor. Partes................................................................................................... 20 Figura 3.12.- Control de cargas (electroimán y motor) ....................................................... 21 Figura 3.13.- Detectores de bola........................................................................................... 22 Figura 3.14.- Emisores infrarrojos. Diagrama a bloques...................................................... 23 Figura 3.15.- Comportamiento de la temperatura del agua cuando la potencia aplicada es igual al 100 %. ...................................................................................................................... 24 Figura 3.16.- Calentador. Curva de potencia........................................................................ 24 Figura 3.17.- Convertidor on–off. Circuito eléctrico............................................................ 25 Figura 3.18.- Control de Temperatura. Diagrama a bloques. ............................................... 25 Figura 3.19.- DS1621. Diagrama a bloques. ........................................................................ 26 Figura 3.20.- DS1621. Resultado de la conversión de temperatura. .................................... 27 Figura 3.21.- DS1621. Salida del pin Tout........................................................................... 27 Figura 3.22.- FT232BM. Diagrama a bloques...................................................................... 30 Figura 3.23.- PIC18F452. Elementos conectados al microcontrolador................................ 32 Figura 3.24.- Aplicación ViscoSteel 1.0............................................................................... 38 Figura A.1.1- I2C. Gráfica 1: Valores de Rp ....................................................................... 48 Figura A.1.2.- I2C. Gráfica 2: Valores de Rp ...................................................................... 48 Figura A.1.3- I2C. Gráfica 3: Valores de Rp ....................................................................... 48 Figura A.1.4.- LM2575. Selección del inductor para regulador de 5 V............................... 49 Figura A.1.5.- LM2575. Selección del inductor para regulador de salida variable. ............ 51 Figura A.3.1.- Diagrama eléctrico ........................................................................................ 58 Figura A.3.2.- PCB. Botom Layer........................................................................................ 59 Figura A.3.3.- PCB. Top Layer ............................................................................................ 59 Figura A.3.4.- Circuito Eléctrico.......................................................................................... 60 Figura A.3.5.- PCB. Top Layer. ........................................................................................... 60 Figura A.3.6.- PCB. Botom Layer........................................................................................ 60 Figura A.3.7.- Tubo. Conexiones. ........................................................................................ 61
74
Figura A.3.8.- IR383. Diagrama eléctrico. ........................................................................... 62 Figura A.3.9.- PT1302BC. Diagrama Eléctrico. .................................................................. 62 Figura A.3.10.- DS1621. Conexiones del sensor. ................................................................ 62 Figura A.3.11.- FT232BM. Alimentación Media................................................................. 63 Figura A.3.12.- MOC3041.- Diagrama Eléctrico................................................................. 63 Figura A.4.1.- Medidas para la estructura que sostiene al tubo............................................ 64 Figura A.4.2.- Medidas del depósito de acero...................................................................... 65 Figura A.4.3.- Medidas de la base. ....................................................................................... 66 Figura A.4.4.- IR383. Dimensiones...................................................................................... 67 Figura A.4.5.- PT1302BC. Dimensiones.............................................................................. 67 Figura A.5.1.- Electroimán. .................................................................................................. 68 Figura A.5.2.- Motor de CD con reductora .......................................................................... 68 Figura A.5.3.- BTA41. Resistencia controlada por el triac. ................................................. 69 Figura A.5.4.- BT137. Bomba sumergible controlada por el triac....................................... 69 Figura A.6.1.-Tubo contenedor. ........................................................................................... 70 Figura A.6.2.- Cuba de acero y Panel de control.................................................................. 70 Figura A.7.1.- Base con tubo. (a) Vista frontal. (b) Vista lateral. ........................................ 71 Figura A.7.2.- Panel de control y depósito de agua. Vista frontal........................................ 72

75
ANEXO 9 ÍNDICE DE TABLAS Tabla 1.1.- Ejemplo. Esferas y constantes empleadas para viscosímetro de bola.................. 7 Tabla 3.1.- Composición aproximada del Borosilicato. ....................................................... 17 Tabla 3.2.- PIC18F452. Distribución de Componentes. ...................................................... 35 Tabla 4.1.- Fluidos. Calibración y prueba. ........................................................................... 39 Tabla 4.2.- Agua. Resultados. .............................................................................................. 40 Tabla 4.3.- Propiedades físicas del aditivo. Unidades SI. .................................................... 41 Tabla 4.4.- Aditivo. Resultados. ........................................................................................... 42 Tabla A.2.1.- Motor – reductor. ........................................................................................... 54 Tabla A.2.2.- Descripción de pines. ..................................................................................... 54 Tabla A.2.3.- Voltajes máximos admisibles......................................................................... 54 Tabla A.2.4.- Características eléctricas – ópticas................................................................. 55 Tabla A.2.5.- Descripción de pines. ..................................................................................... 55 Tabla A.2.6.- Bits del Registro de Configuración. ............................................................... 55 Tabla A.2.7.- Comandos....................................................................................................... 56 Tabla A.2.8.- Características Eléctricas. .............................................................................. 56 Tabla A.2.9.- Descripción de pines ...................................................................................... 56 Tabla A.2.10.- Características eléctricas. ............................................................................. 57 Tabla A.2.11.- Valores de C1 y C2 según el modo de oscilación. ....................................... 57 Tabla A.2.12.- Características eléctricas. ............................................................................. 57

76
ANEXO 10 FACTORES DE CONVERSIÓN Unidades de volumen
-6 3
3 -6 3
3 -9 3
1 mL = 1 10 m
1 cm = 1 10 m
1 mm = 1 10 m
×××
Unidades de densidad
33 3
gr kg1 = 1 10
cm m×
Unidades de viscosidad dinámica
2
kg1 poise = 0.1 100 centipoises
m sN s kg
1 = 1 = 1 Pa sm m s
=⋅
⋅ ⋅⋅
Unidades de viscosidad cinemática
2-4 m
1 stokes = 1 10 100 centistokess
× =
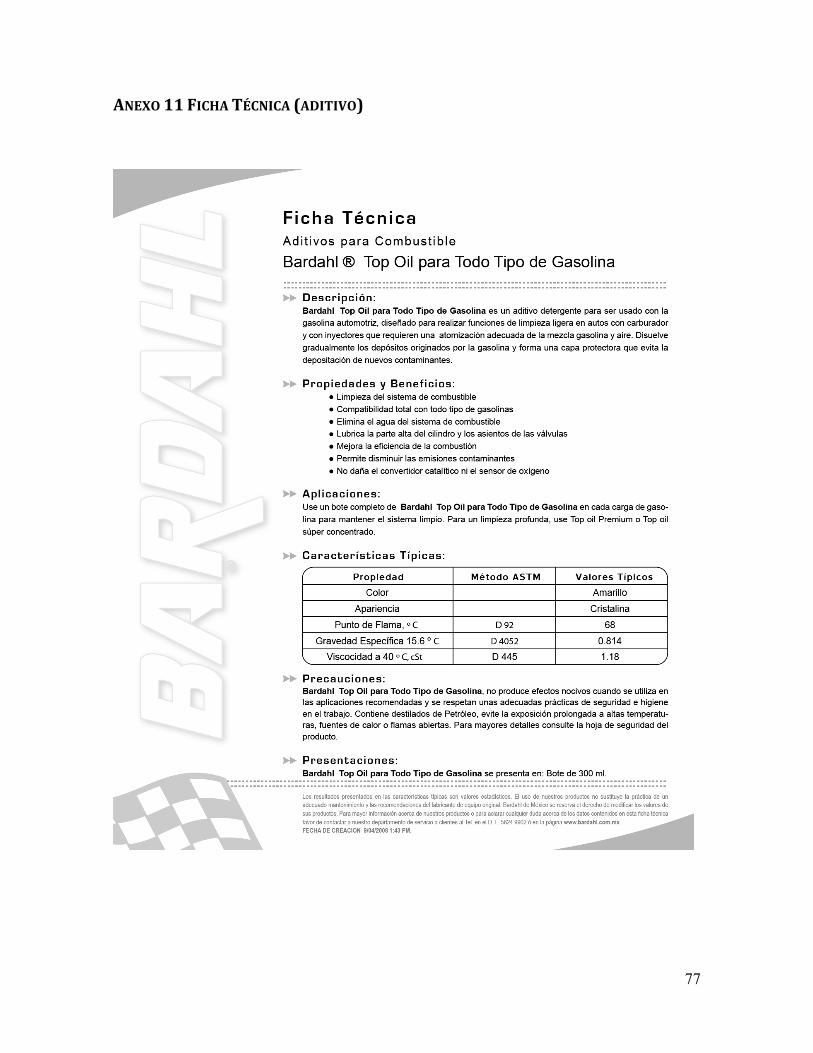
77
ANEXO 11 FICHA TÉCNICA (ADITIVO)
78
ANEXO 12 GLOSARIO Programa controlador.- conocido comúnmente como driver, permite que el sistema operativo de una computadora personal pueda comunicarse con un periférico. Exhibidor alfanumérico.- También llamado Display de Cristal Líquido (LCD). Interrupción.- mecanismo por el cual un evento interno o externo puede interrumpir la ejecución de un programa en cualquier momento y saltar automáticamente a una subrutina definida. Ciclo máquina.- Unidad básica de tiempo que utiliza un microcontrolador. Byte.- conjunto de 8 bits. Bit.- Acrónimo de Binary Digit. Es un dígito del sistema de numeración binario. USART.- Siglas de Universal Synchronous Asynchronous Receiver Transmitter. Conocido también como Interfase de Comunicaciones Seriales o SCI. USB.- Siglas de Universal Serial Bus. Interfaz que provee un estándar de comunicación serie para conectar equipos a una computadora personal. LQFP.- Siglas de Low – profile Quad Flat Package. Encapsulado de circuito integrado para montaje superficial cuyos pines se extienden por los cuatro lados. Los pines se enumeran en sentido contrario a las agujas del reloj a partir del punto guía. Baudio.- Unidad que expresa la cantidad de información enviada por la línea de transmisión en la unidad de tiempo. VID.- Siglas de Vendor ID. Número que identifica al fabricante de un circuito integrado. En el caso de la empresa FTDI (FT232BM), el número es 0X0403. PID.- Siglas de Product ID. El programa controlador incluye la información del equipo que comprende: nombre de equipo, compañía, país y correo electrónico. EEPROM.- Siglas de Electrically Erasable Programmable Read Only Memory. Asíncrono.- Modo de comunicación en donde no existe una línea de reloj común que establezca la duración de un bit y la información puede ser enviado en cualquier momento. Esto conlleva que cada dispositivo tiene su propio reloj y que previamente se ha acordado que ambos dispositivos transmitirán datos a la misma velocidad. Host.- Dispositivo que controla la comunicación del bus.

79
Hub.- Dispositivo que contiene uno o más conectores o conexiones internas hacia otros dispositivos USB, el cual habilita la comunicación entre el host y otros equipos. I2C.- Siglas de Inter Integrated Circuit Bus. Es un bus serie formado por dos hilos, que puede conectar varios dispositivos mediante un hardware reducido. Histéresis.- Tendencia de un material a conservar una de sus propiedades, en ausencia del estímulo que la ha generado. TTL.- Siglas de Transistor Transistor Logic. Tecnología de construcción de circuitos electrónicos digitales. Se caracteriza por manejar una tensión de alimentación entre 4.75V y 5.35V así como niveles lógicos definidos comprendidos entre 0.2V y 0.8V para el estado bajo y 2.4 y Vcc para el estado alto. Puente.- Circuito eléctrico que permite controlar el giro de un motor CD invirtiendo el sentido de la corriente eléctrica sobre sus terminales. Son ampliamente utilizados como convertidores de corriente directa a alterna. Fototriac.- tiristor bidireccional activado mediante luz infrarroja. Infrarrojo.- tipo de radiación electromagnética cuya longitud de onda es mayor que la luz visible. Monolítico.- circuito integrado fabricado dentro de un cristal de silicio, germanio, arseniuro de galio, silicio – germanio, etc. Regulador Buck.- Topología de los reguladores conmutados en que un voltaje mayor se convierte en un voltaje menor. También conocido como regulador conmutado step – down. Diagrama de flujo.- Representación gráfica de un algoritmo. Puerto COM.- Nombre que designa el administrador de dispositivos al puerto serie de una computadora personal. VCP.- Siglas de Virtual COM Port. Se denomina así al programa controlador de un equipo para que éste sea reconocido por una computadora personal como un puerto serie. Puerto LPT.- Siglas de Line Print Terminal. Comúnmente utilizado para conectar una impresora a una computadora personal. RS232.- Es una interfaz que designa una norma para el intercambio serie de datos binarios entre un DTE (Equipo Terminal de Datos) y un DCE (Equipo de Terminación del Circuito). PCB.- Siglas de Printed Circuit Board. Placa o tarjeta de circuito impreso de espesor variable de forma rectangular o cuadrada.
80
Automatización.- Uso de sistemas o elementos computarizados para controlar maquinarias y/o procesos industriales substituyendo a operadores humanos. Termostato.- Elemento de un sistema de control simple que abre o cierra un circuito eléctrico en función de la temperatura. Layer.- Capa de un circuito impreso. Transceptor.- dispositivo que realiza funciones tanto de transmisión como de recepción. Isócrona.- Transferencia de datos que se utiliza cuando es necesario enviar datos en tiempo real. Los datos son enviados con una cadena precisa ajustada a un reloj, de modo que la transmisión es a velocidad constante. Paridad.- código que permite detectar errores en la transmisión. Éste se añade a los n bits que forman el carácter original. Bit de parada.- representado con un ‘1’ lógico, indica el fin de la transferencia asíncrona. Hojas de datos.- documento en formato PDF que ofrece el fabricante de cada circuito integrado. Se le conoce también como datasheet u hoja de especificaciones.

