
Technology in the Marketing Activities of Schools as an Example to Institutional Isomorphism

Int. J. Mechanisms and Robotic Systems, Vol. 1, No. 1, 2013 49
Copyright © 2013 Inderscience Enterprises Ltd.
Some new codes for isomorphism identification among kinematic chains and their inversions
Ashok Dargar* Department of Mechanical and Automation Engineering, Amity School of Engineering and Technology, Amity University, Noida, India Fax: 91-122-2961161 E-mail: [email protected] *Corresponding author
Ali Hasan and R.A. Khan Department of Mechanical Engineering, Faculty of Engineering and Technology, Jamia Millia Islamia University, New Delhi-110025, India E-mail: [email protected] E-mail: [email protected]
Abstract: The present work deals with problem of identification of isomorphism which is frequently encountered in structural synthesis of kinematic chains. Using the concept of weighed structural matrices some new codes has been proposed to reveal simultaneously link is isomorphic and chain is isomorphic. Firstly, two new codes for each link, called as extended adjacency link value (EALV) and link total loop size (TLS) are developed to detect distinct mechanisms of a kinematic chain. After that for each kinematic chain a new code called as extended adjacency string (EAS) which is a by-product of the same method is developed. The proposed method is easy to compute, reliable and capable of detecting isomorphism in all simple jointed compound kinematic chains. Some examples are also provided to demonstrate the effectiveness of this method.
Keywords: kinematic chain; isomorphism; distinct mechanisms; DM.
Reference to this paper should be made as follows: Dargar, A., Hasan, A. and Khan, R.A. (2013) ‘Some new codes for isomorphism identification among kinematic chains and their inversions’, Int. J. Mechanisms and Robotic Systems, Vol. 1, No. 1, pp.49–67.
Biographical notes: Ashok Dargar is an Assistant Professor in the Department of Mechanical and Automation Engineering, Amity University, Noida, India. His research areas are kinematics of machines, computational mechanics and design optimisation.
Ali Hasan has about 15 years teaching and five years industrial experience. Presently he is an Assistant Professor in the Mechanical Engineering Department, Faculty of Engineering and Technology, Jamia Millia Islamia University, New Delhi, India. His research areas are theory of machines, mechatronics and computational mechanics. He has published 17 research papers in national and international journals.

50 A. Dargar et al.
R.A. Khan has about 40 years teaching and administrative experience. Presently he is working as a Professor in the Mechanical Engineering Department, Faculty of Engineering and Technology, Jamia Millia Islamia University, New Delhi., India. His research areas are theory of machines, design engineering and computational mechanics. He has published more than hundred research papers in national and international journals/conferences. He is the founder member of Association of Machines and Mechanism (AMM) and Indian Management Science Association (IMSA).
1 Introduction
The isomorphism identification between kinematic chains and among inversions of a given chain is one of the most important and challenging problem in structural synthesis of kinematic chain. Detection of isomorphism is important, so that unnecessary duplication and omission of a potential useful chain may be avoided. Graph theory (Hsu and Lam, 1992) has been widely adopted for the representation of mechanisms. Therefore, plenty of literature dealing with this topic in the area of graph theory as well as kinematics exists. The characteristic-polynomial methods were developed by Uicker and Raicu (1975), Yan and Hall (1981, 1982), Mruthyunjaya (1984a, 1984b), and Mruthyunjaya and Balasubramanian (1987). These methods have the disadvantage of dealing with large numerical and later counter examples were also reported by He et al. (2005). Canonical code approaches (Ambekar and Agarwal, 1987) require highly sophisticated algorithms and greater computational effort when applied to large kinematic chain. Hamming number technique (Rao and Rao 1993a, 1993b) is very reliable and computationally efficient, however when the primary Hamming string fails, the cumbersome computation of the secondary Hamming string is needed. Hsu (1993a, 1993b) using the concept of admissible graphs synthesised all possible graphs of planetary gear trains by the process of edge transformation. Then, the structural codes of graphs are used to identify the isomorphism. The adjacent-chain-table method (Chu and Cao, 1994) had been proposed to identify isomorphism, but it is not suitable for computerised structural synthesis. The fuzzy logic method (Rao, 2000) requires computation of not only the first adjacency matrix but also the adjacency matrix of higher, even up to N/2. The method of eigenvectors and eigenvalues of adjacency matrices (Chang et al., 2002; Cubillo and Wan, 2005) possesses the advantages of using standard matrix theory, but it does not belong to the code-based method and it is hard to analyse the topological structure of kinematic chains. The unconventional approaches, such as the artificial neural network approach (Kong et al., 1999) and the genetic algorithm (Rao, 2000) are also applied to isomorphism identification, but the effectiveness of these methods still needs testing (Mruthyunjaya, 2003). Sunkari and Schmidt (2006) first time established the reliability of the existing spectral techniques for isomorphism detection. Ding and Huang (2009) addresses the problem of isomorphism identification by finding a unique representation of graphs. The unique representation of the graph makes isomorphism identification easy and sketching and establishment of graph database feasible. It remains efficient even when the links of kinematic chains increase into the thirties. Hasan and Khan (2008) presented a method based on degrees of

Some new codes for isomorphism identification 51
freedom of kinematic pairs. Dargar et al. (2010) proposed a method based on first and second adjacency value of links, but no mathematical proof was presented. In this paper using the second order adjacency of links and the loop characteristics of kinematic chains a new topological description the extended adjacency string (EAS), is proposed. The proposed method has three very important characteristics:
1 It incorporates all basic features of the chain and it taken care of not only the first adjacency of links but also higher order adjacency of links to completely specify the necessary and sufficient conditions for isomorphism identification.
2 The EAS does not change even when the chain is redrawn and labelled in different ways.
3 It is a code-based method and can be used to analyse the topological structure and to establish the atlas database of kinematic chains.
2 Basic theory
In graph theoretical connotation, a kinematic chain is a collection of vertices (joints) connected by means of edges (links) in a predefined fashion. The kinematic chains are complex combinations of binary, ternary and the other higher order links. While considering structural equivalence it is essential to consider type of links, joints and layout of the links in the assembly. According to graph theory, one essential condition for isomorphism is that the number and degree of vertices must be identical. In the pretext of chains it means that the number and type of links must be same. The type of links can be identified by their degrees, as it acts as their identification number. So in the present work considering the kinematic chain as a weighed graph, two weighing function known as joint connectivity value and link connectivity value are defined for joints and links respectively.
2.1 Definitions of terminology
The following definitions are to be understood clearly before applying the proposed method.
1 Degree of link: A numerical value for the link, based on its connectivity to other links therefore quaternary link has degree equal to four and ternary link has degree equal to three. In order to calculate the degree of a particular link add all the elements of the corresponding row of the structural incidence matrix S, as explained in step I of the method.
2 Joint connectivity value: Connectivity value of a simple joint depends upon the type of links connected to it. For a particular joint, it is define as the algebraic mean of degrees of the two links connected at the joint For example for a simple joint if a binary and a ternary link are connected at the joint then its value will be [(2 + 3) / 2] = 2.5.
52 A. Dargar et al.
3 Link connectivity value: Connectivity value of a link depends upon the number and type of joints associated with it. For a link it is defined as the sum of joint connectivity value of all the joints of that link. In order to calculate the connectivity value of a particular link add all the elements of the corresponding row of the weighed structural incidence matrix SW, as explained in step III of the method. For example the link connectivity value of the link 1 is [3 + 2.5] = 5.5 and for link 8 it is [3+ 3+ 3 + 3] = 12 of the chain of Figure 2.
4 Direct adjacency link value (DALV): For a link it is defined as the sum of link connectivity value of all the links that are adjacent to it. In order to calculate the direct adjacency value of a particular link add all the elements of the corresponding row of the first weighed structural incidence matrix SW1, as explained in step IV of the method. For example the adjacency link values of the link 1 is [12 + 8] = 20, and for link 8 it is [5.5 + 5.5 + 5 + 5] = 21 of the chain of Figure 2.
5 Extended adjacency link value (EALV): For a link it is defined as the sum of DALVs of all the links that are adjacent to it. In order to calculate the extended adjacency value of a particular link add all the elements of the corresponding row of second weighed structural incidence matrix SW2, as explained in step V of the method. For example the EALVs of the link 1 is [21 + 19] = 40, and for link 8 it is [20 + 20 + 16.5 + 16.5] = 73 of the chain of Figure 2.
6 Loop size: It is defined as the size of the loop. It indicates the number of links participating on the periphery of any loop. In order to calculate the loop sizes add all the elements of the columns of link loop matrix, as explained in step VI of the method. For example the loop sizes are 4, 6, 6 and 6 for chain shown in Figure 2.
7 Link total loop size (TLS): For a link it is define as the summation of sizes of all the loops in which it is participating. In order to calculate the TLSs of a particular link add all the elements of the corresponding row of weighed link loop matrix LLW, as explained in step VII of the method. For example link 1 is participating in the loops L1 and L4 of sizes 4 and 6 respectively. So link TLS for link 1 is [6 + 4] = 10 of the chain of Figure 2.
The total link loop size is independent from the drawing of kinematic chain and it will remain constant even if chain is drawn in different orientation. For example, Figure 4(b) is isomorphic to Figure 4(a) but redrawn so that its internal loop sizes are now different than Figure 4(a). For Figure 4(a), the internal loop sizes are 6, 7 and 5, where as for Figure 4(b), the internal loop sizes are 4, 5 and 7. But the total link loop size of all links in descending order are 18, 17, 16, 15, 13, 13, 13, 12 and 9 respectively, identical for both the chains. So TLS can be used as an invariant.
8 Extended adjacency string (EAS): For a kinematic chain it is a string of extended adjacency value of its links in descending order, followed by highest link TLS.
3 Identification of loops of a kinematic chain
For the chains without crossed links identification of all the loops is quite easy just by visual inspection. However, some difficulty may arise when chains with crossed links are

Some new codes for isomorphism identification 53
considered as the participation of links in different loops is not obvious. To accomplish this, chains with crossed links are divided into two cases:
1 chains with a well defined external loop
2 chains without a well defined external loop (Rao and Rao, 1993a).
3.1 Chains with a well defined external loop
Following loops are to be identified for the crossed links chains with a well defined external loop.
• Loops without the crossed links, if any.
• Loops identified by ignoring the crossed links, if binary, one at a time; Loops identified by disconnecting the joint, necessary to avoid crossing, in case of links with higher connectivity, i.e., links should not be totally ignored but the side(s) responsible for crossing should be ignored.
For example for the chain shown in Figure 1(a), following loops are identified:
• A loop without the crossed links, loop L1 with links 1, 6, 7 and 8.
• Loops identified by ignoring the crossed link 9 are loop L2 with links 1, 2, 3, 4, 10, 8 and loop L3 with links 4, 5, 6, 7, 8 and 10.
• Loops identified by ignoring the crossed link 10 are loop L4 with links 1, 2, 3, 9, 7, 8 and loop L5 with links 3, 4, 5, 6, 7 and 9.
3.2 Chains without a well defined external loop
Following loops are to be identified for the crossed links chains without a well defined external loop.
• Loops without the crossed links, if any.
• Loops identified by ignoring the crossed links, if binary, one at a time; Loops identified by disconnecting the joint, necessary to avoid crossing, in case of links with higher connectivity, i.e., links should not be totally ignored but the side(s) responsible for crossing should be ignored.
• Loops consisting of crossed links.
For example for the chain shown in Figure 1(b) following loops are identified:
• Loops without the crossed links are loop L1 with links 1, 2, 9, 8 and loop L2 with links 1, 7, 10 and 8.
• A loop identified by ignoring the crossed link 4 is loop L3 with links 9, 5, 6, 7, 10 and 8.
• A loop identified by ignoring the crossed link 5 is loop L4 with links 2, 3, 4, 10, 8 and 9.
54 A. Dargar et al.
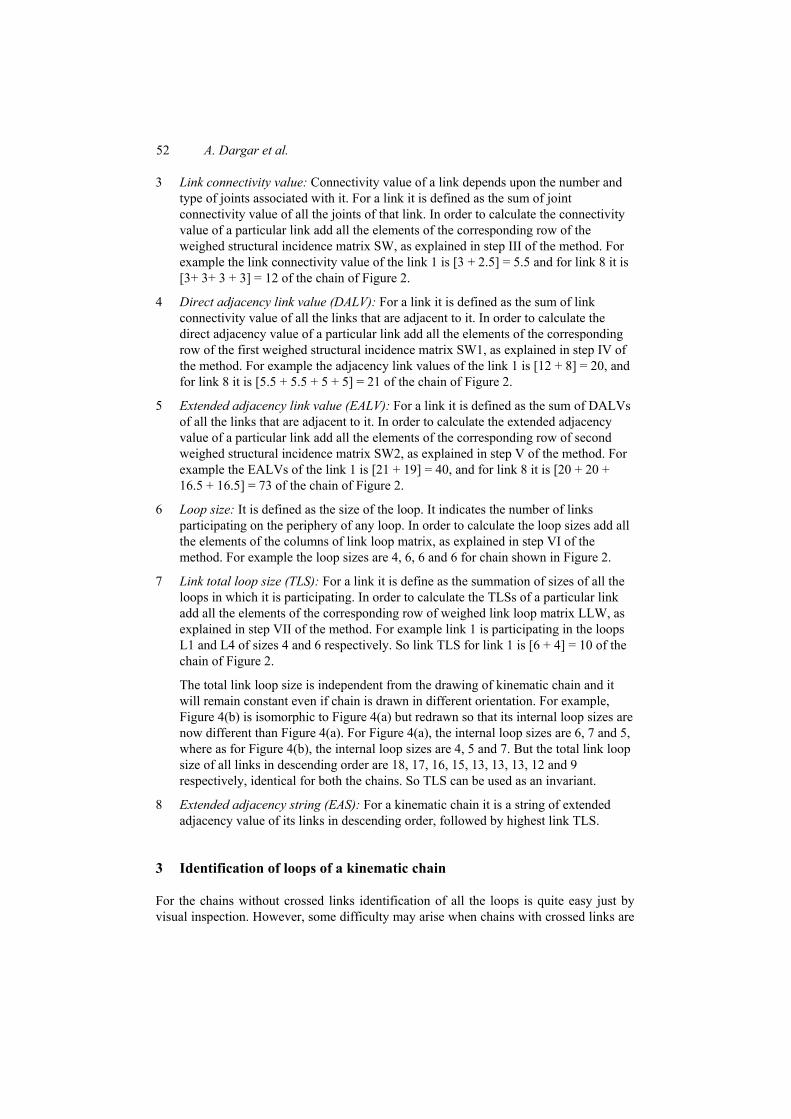
• A loop consisting of crossed links 4 and 5 is loop L5 with links 2, 3, 4, 10, 7, 6, 5 and 9.
Figure 1 (a) Crossed ten links chain with a well defined external loop and (b) Crossed ten links chain without a well defined external loop
(a) (b)
4 Method
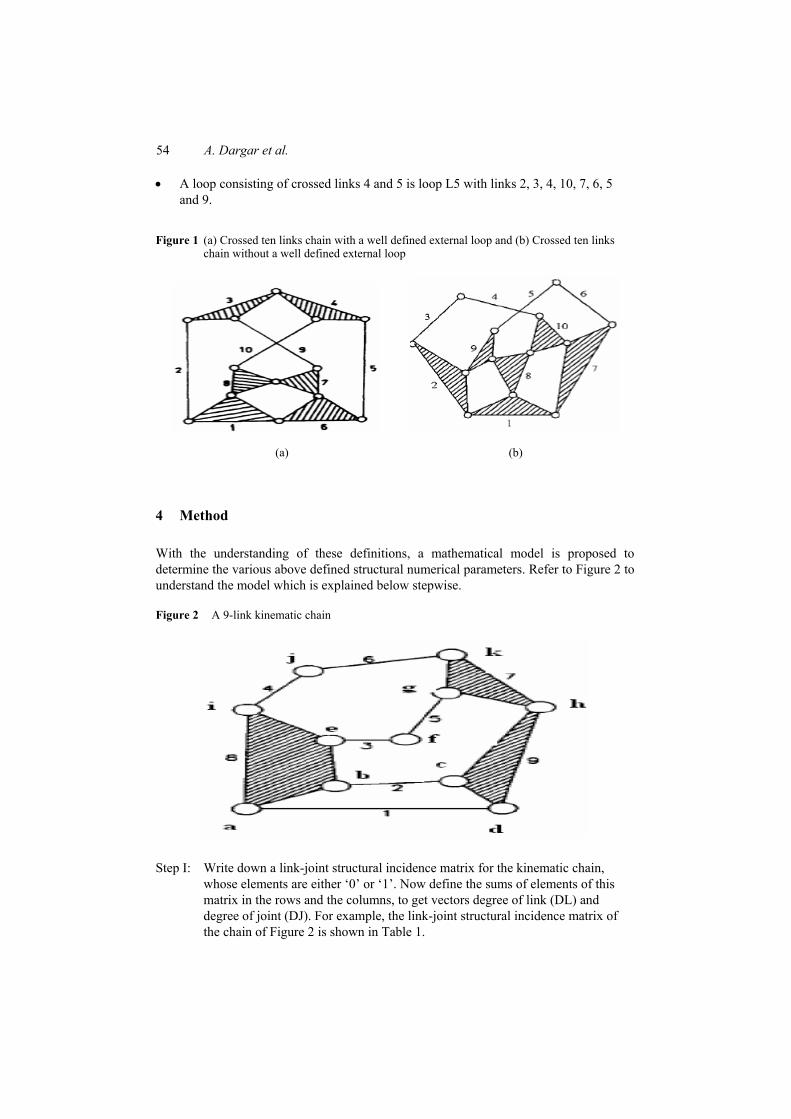
With the understanding of these definitions, a mathematical model is proposed to determine the various above defined structural numerical parameters. Refer to Figure 2 to understand the model which is explained below stepwise.
Figure 2 A 9-link kinematic chain
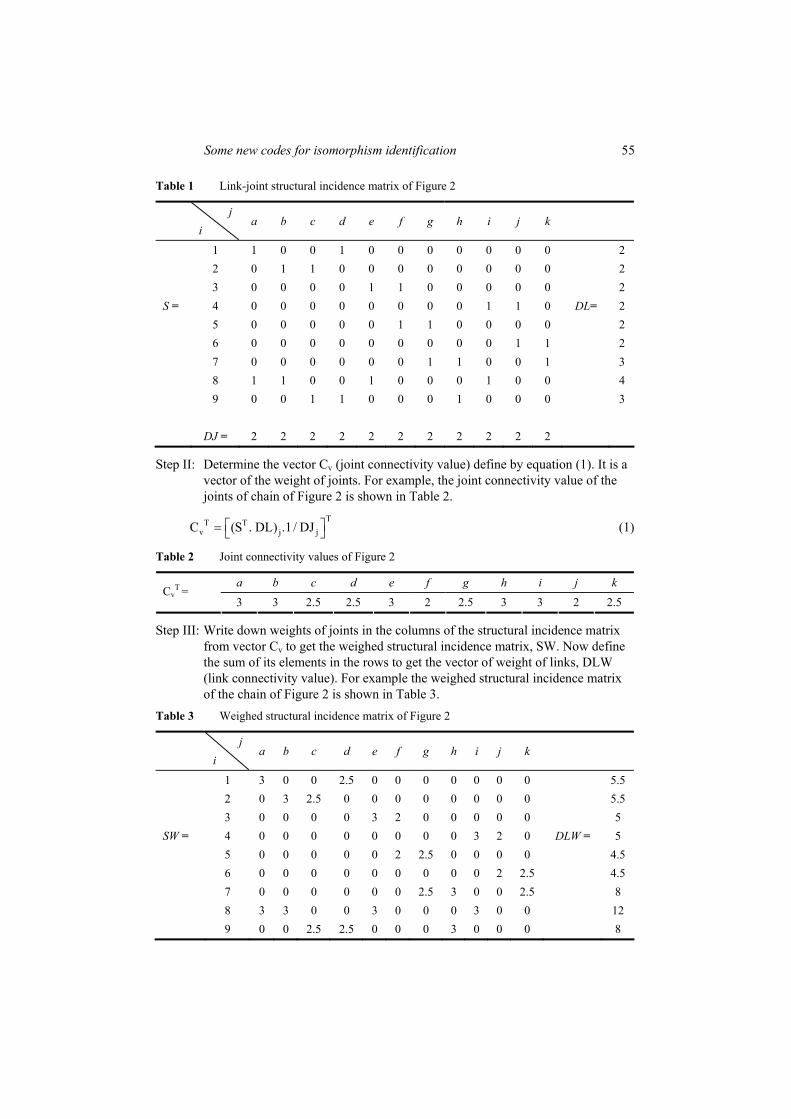
Step I: Write down a link-joint structural incidence matrix for the kinematic chain, whose elements are either ‘0’ or ‘1’. Now define the sums of elements of this matrix in the rows and the columns, to get vectors degree of link (DL) and degree of joint (DJ). For example, the link-joint structural incidence matrix of the chain of Figure 2 is shown in Table 1.
Some new codes for isomorphism identification 55
Table 1 Link-joint structural incidence matrix of Figure 2
j i
a b c d e f g h i j k
1 1 0 0 1 0 0 0 0 0 0 0 2 2 0 1 1 0 0 0 0 0 0 0 0 2 3 0 0 0 0 1 1 0 0 0 0 0 2 S = 4 0 0 0 0 0 0 0 0 1 1 0 DL= 2 5 0 0 0 0 0 1 1 0 0 0 0 2 6 0 0 0 0 0 0 0 0 0 1 1 2 7 0 0 0 0 0 0 1 1 0 0 1 3 8 1 1 0 0 1 0 0 0 1 0 0 4 9 0 0 1 1 0 0 0 1 0 0 0 3 DJ = 2 2 2 2 2 2 2 2 2 2 2
Step II: Determine the vector Cv (joint connectivity value) define by equation (1). It is a vector of the weight of joints. For example, the joint connectivity value of the joints of chain of Figure 2 is shown in Table 2.
T T Tv j jC (S . DL) .1/ DJ⎡ ⎤= ⎣ ⎦ (1)
Table 2 Joint connectivity values of Figure 2
a b c d e f g h i j k Cv
T = 3 3 2.5 2.5 3 2 2.5 3 3 2 2.5
Step III: Write down weights of joints in the columns of the structural incidence matrix from vector Cv to get the weighed structural incidence matrix, SW. Now define the sum of its elements in the rows to get the vector of weight of links, DLW (link connectivity value). For example the weighed structural incidence matrix of the chain of Figure 2 is shown in Table 3.
Table 3 Weighed structural incidence matrix of Figure 2
j i
a b c d e f g h i j k
1 3 0 0 2.5 0 0 0 0 0 0 0 5.5 2 0 3 2.5 0 0 0 0 0 0 0 0 5.5 3 0 0 0 0 3 2 0 0 0 0 0 5 SW = 4 0 0 0 0 0 0 0 0 3 2 0 DLW = 5 5 0 0 0 0 0 2 2.5 0 0 0 0 4.5 6 0 0 0 0 0 0 0 0 0 2 2.5 4.5 7 0 0 0 0 0 0 2.5 3 0 0 2.5 8 8 3 3 0 0 3 0 0 0 3 0 0 12 9 0 0 2.5 2.5 0 0 0 3 0 0 0 8
56 A. Dargar et al.
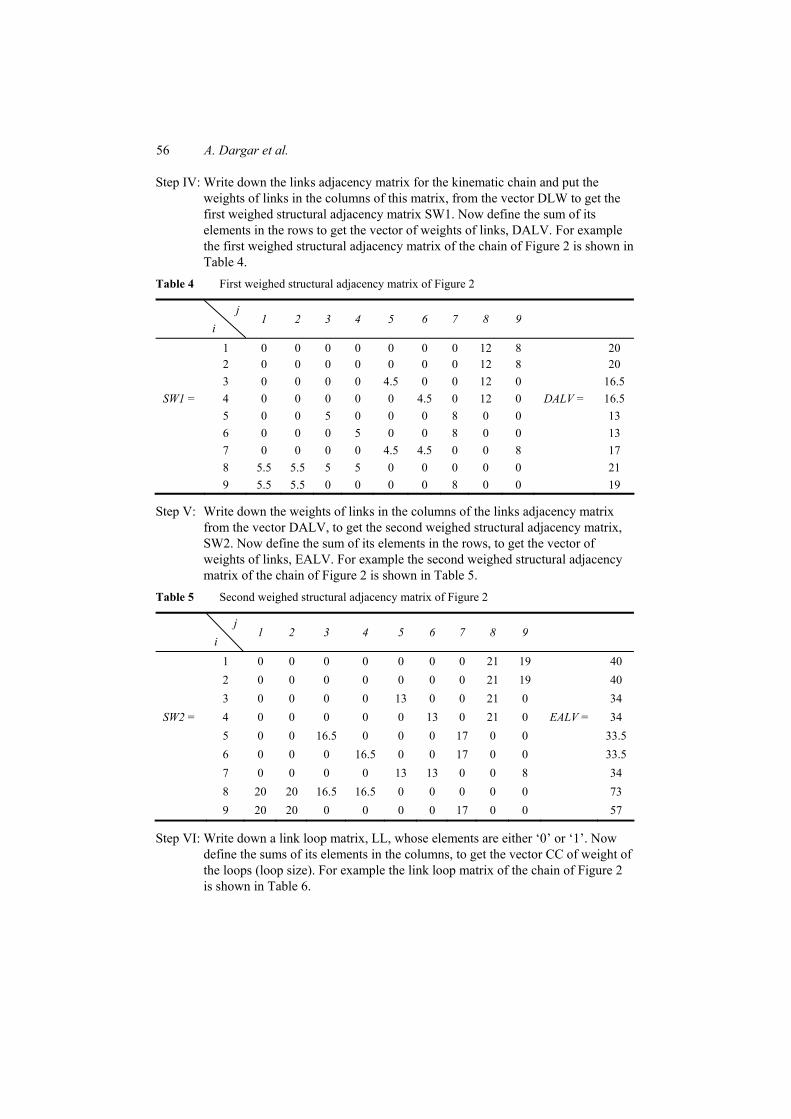
Step IV: Write down the links adjacency matrix for the kinematic chain and put the weights of links in the columns of this matrix, from the vector DLW to get the first weighed structural adjacency matrix SW1. Now define the sum of its elements in the rows to get the vector of weights of links, DALV. For example the first weighed structural adjacency matrix of the chain of Figure 2 is shown in Table 4.
Table 4 First weighed structural adjacency matrix of Figure 2
j i
1 2 3 4 5 6 7 8 9
1 0 0 0 0 0 0 0 12 8 20 2 0 0 0 0 0 0 0 12 8 20 3 0 0 0 0 4.5 0 0 12 0 16.5 SW1 = 4 0 0 0 0 0 4.5 0 12 0 DALV = 16.5 5 0 0 5 0 0 0 8 0 0 13 6 0 0 0 5 0 0 8 0 0 13 7 0 0 0 0 4.5 4.5 0 0 8 17 8 5.5 5.5 5 5 0 0 0 0 0 21 9 5.5 5.5 0 0 0 0 8 0 0 19
Step V: Write down the weights of links in the columns of the links adjacency matrix from the vector DALV, to get the second weighed structural adjacency matrix, SW2. Now define the sum of its elements in the rows, to get the vector of weights of links, EALV. For example the second weighed structural adjacency matrix of the chain of Figure 2 is shown in Table 5.
Table 5 Second weighed structural adjacency matrix of Figure 2
j i
1 2 3 4 5 6 7 8 9
1 0 0 0 0 0 0 0 21 19 40 2 0 0 0 0 0 0 0 21 19 40 3 0 0 0 0 13 0 0 21 0 34 SW2 = 4 0 0 0 0 0 13 0 21 0 EALV = 34 5 0 0 16.5 0 0 0 17 0 0 33.5 6 0 0 0 16.5 0 0 17 0 0 33.5 7 0 0 0 0 13 13 0 0 8 34 8 20 20 16.5 16.5 0 0 0 0 0 73 9 20 20 0 0 0 0 17 0 0 57
Step VI: Write down a link loop matrix, LL, whose elements are either ‘0’ or ‘1’. Now define the sums of its elements in the columns, to get the vector CC of weight of the loops (loop size). For example the link loop matrix of the chain of Figure 2 is shown in Table 6.
Some new codes for isomorphism identification 57
Table 6 Link loop matrix of Figure 2
Loops Links
1 2 3 4
1 1 0 0 1 2 1 1 0 0 3 0 1 1 0 LL = 4 0 0 1 1 5 0 1 1 0 6 0 0 1 1 7 0 1 1 1 8 1 1 1 1 9 1 1 0 1 CC = 4 6 6 6
Step VII: Write down the weights of the loops in the link loop matrix rows, from the vector CC, to get the weighed link loop matrix, LLW. Now define the sum of its elements in the rows, to get the vector TLS of loop weight of links, (link TLS). For example the link loop matrix of the chain of Figure 2 is shown in Table 7.
Table 7 Weighed link loop matrix of Figure 2
Loop Link
1 2 3 4
1 4 0 0 6 10 2 4 6 0 0 10 3 0 6 6 0 12 LLW = 4 0 0 6 6 TLS = 12 5 0 6 6 0 12 6 0 0 6 6 12 7 0 6 6 6 18 8 4 6 6 6 22 9 4 6 0 6 16
5 Identification of isomorphism
Isomorphism definition: Two kinematic chain A and B are said to be isomorphic, if there exists a one to one correspondence between the links of A and B such that pair of links of A are jointed, if and only if the corresponding pair of links B are jointed. If there is no such correspondence, the two chains are non-isomorphic (Sunkari and Schmidt, 2006).
58 A. Dargar et al.
5.1 New structural invariants
Considering all essential features, links, joints and loops of the kinematic chain, two new structural invariants (codes), EALV and TLS, are proposed for each link to identify the equivalent links of a chain. To identify isomorphism among kinematic chains a new invariant (code), EAS, is proposed for each chain. The EALV, TLS and EAS are invariants for a kinematic chain mechanism because they are independent of the relabelling, redrawing of links and joints of a chain.
5.2 Test for isomorphism among inversions
The codes, EALV and link TLS of the various links have the potential to disclose how many inversions can be obtained from a given chain and by fixing which links these inversions are possible. If these invariants of the links are identical then the inversions are equivalent and constitute only one distinct mechanism.
Referring to Table 8 of Figure 2, the link invariants EALV and TLS for links 1, 2 are identical, for links 3, 4 are identical, for links 5, 6 are also identical, and for links 7, 8 and 9 are distinct. So the links – (1, 2), (3, 4) and (5, 6) are equivalent links and by taking one link each from equivalent links together with the distinct links 7, 8 and 9, total six inversions are possible for the chain in Figure 2. Referring to the Table 9 of Figure 3(a), the links – (1, 2) and (8, 12) are equivalent links, so total ten inversions are possible for the chain in Figure 3(a). Table 8 Invariants of links of chain of Figure 2
Link no. Adjacent links Link connectivity value DALV EALV Link loops
sizes TLS
1 8,9 5.5 20.0 40.0 4, 6 10 2 8,9 5.5 20.0 40.0 4, 6 10 3 5,8 5 16.5 34.0 6, 6 12 4 6, 8 5 16.5 34.0 6, 6 12 5 3, 7 4.5 13.0 33.5 6, 6 12 6 4, 7 4.5 13.0 33.5 6, 6 12 7 5, 6, 9 8 17.0 45.0 6, 6, 6 18 8 1, 2, 3, 4 12 21.0 73.0 4, 6, 6, 6 22 9 1, 2, 7 8 19.0 57.0 4, 6, 6 16
5.3 Test for isomorphism among chains
The EAS is a definitive test for isomorphism among chains. If the two chains are known to be isomorphic, their EASs should be identical and vice-versa. If the two chains are non-isomorphic, the EASs should differ at some position or other.
Some new codes for isomorphism identification 59
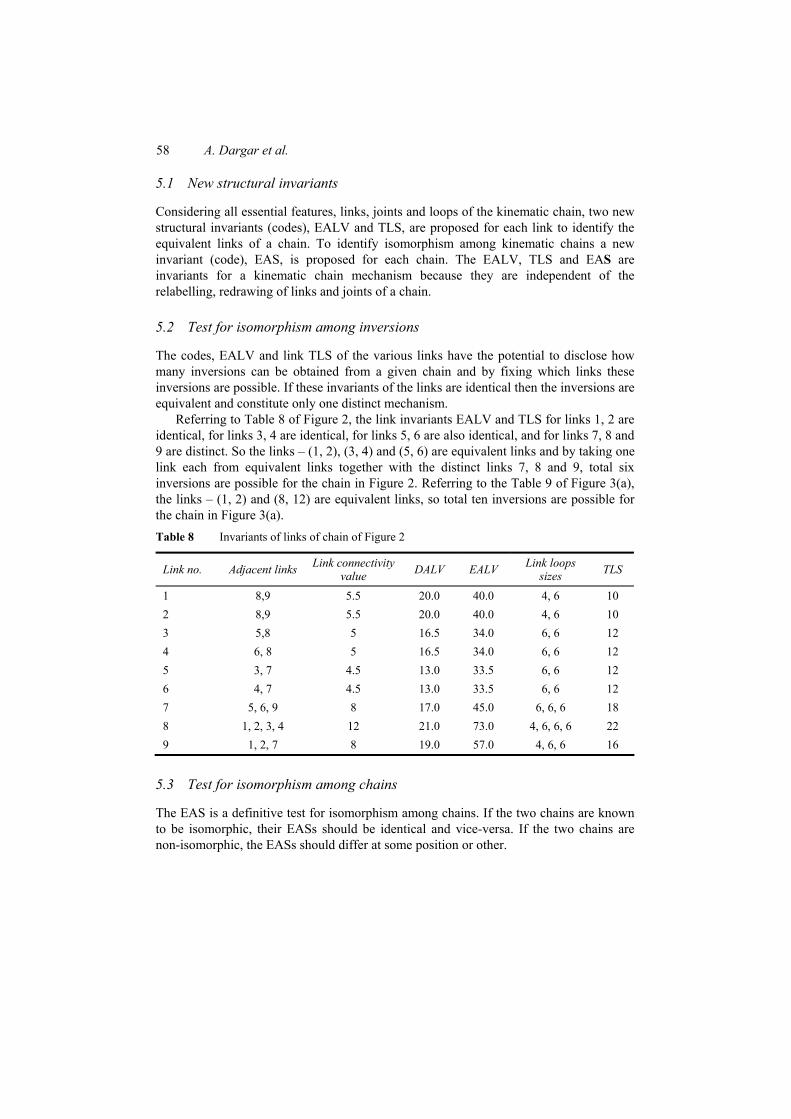
Example 1: Two 12 link kinematic chains are shown in Figure 3(a) and 3(b) respectively. They have the same characteristic polynomial coefficients and eigenvalues, so the characteristic polynomial approach fails to work (Yan and Hall, 1981).
Figure 3 Two 12 link kinematic chains
(a) (b)
Referring to Table 9 of Figure 3(a) the EAS of this kinematic chain is [68.5, 68.5, 68, 67, 63.5, 63.5, 62, 48, 45, 38, 37.5, 37.5 (18)]. Table 9 Invariants of links of chain of Figure 3(a)
Link no. Adjacent links
Link connectivity value DALV EALV Link loops
sizes TLS
1 5, 6 5 16 37.5 6, 6 12 2 5, 9 5 16 37.5 6, 6 12 3 5, 10 5 16 38 6, 6 12 4 7, 11 5 17 45 5, 5 10 5 1, 2, 3 7.5 15 48 6, 6, 6 18 6 1, 7, 8 8.5 22.5 63.5 5, 6, 6 17 7 4, 6, 9 8.5 22 62 5, 5, 6 16 8 6, 10, 11 9 25.5 68.5 4, 5, 6 15 9 2, 7, 12 8.5 22.5 63.5 5, 6, 6 17 10 3, 8, 12 8.5 23 67 4, 6, 6 16 11 4, 8, 12 8.5 23 68 4, 5, 5 14 12 9, 10, 11 9 25.5 68.5 4, 5, 6 15
Referring to Table 10 of Figure 3(b) the EAS of this kinematic chain is [68.5, 68.5, 68, 63, 62, 57.5, 57.5, 48, 45, 38, 37.5, 37.5 (22)].
60 A. Dargar et al.
Table 10 Invariants of links of chain of Figure 3(b)
Link no. Adjacent links Link connectivity value DALV EALV Link loops
sizes TLS
1 5, 11 5 16 37.5 6, 7 13
2 5, 12 5 16 37.5 6, 6 12
3 6, 10 5 17 45 5, 7 12
4 11, 12 5 16 38 6, 6 12
5 1, 2, 6 8 18.5 48 6, 6, 7 19
6 3, 5, 7 8.5 22 62 5, 6, 7 18
7 6, 8, 9 9 26.5 63 4, 5, 6 15
8 7, 10, 11 9 25.5 68.5 4, 5, 6, 7 22
9 7, 10, 12 9 25.5 68.5 4, 6, 6 16
10 3, 8, 9 8.5 23 68 4, 5, 6, 7 22
11 1, 4, 8 8 19 57.5 6, 6, 7 19
12 2, 4, 9 8 19 57.5 6, 6, 6 18
It can be found that the EAS of chain of Figure 3(a) and of Figure 3(b) is different; hence they are non-isomorphic.
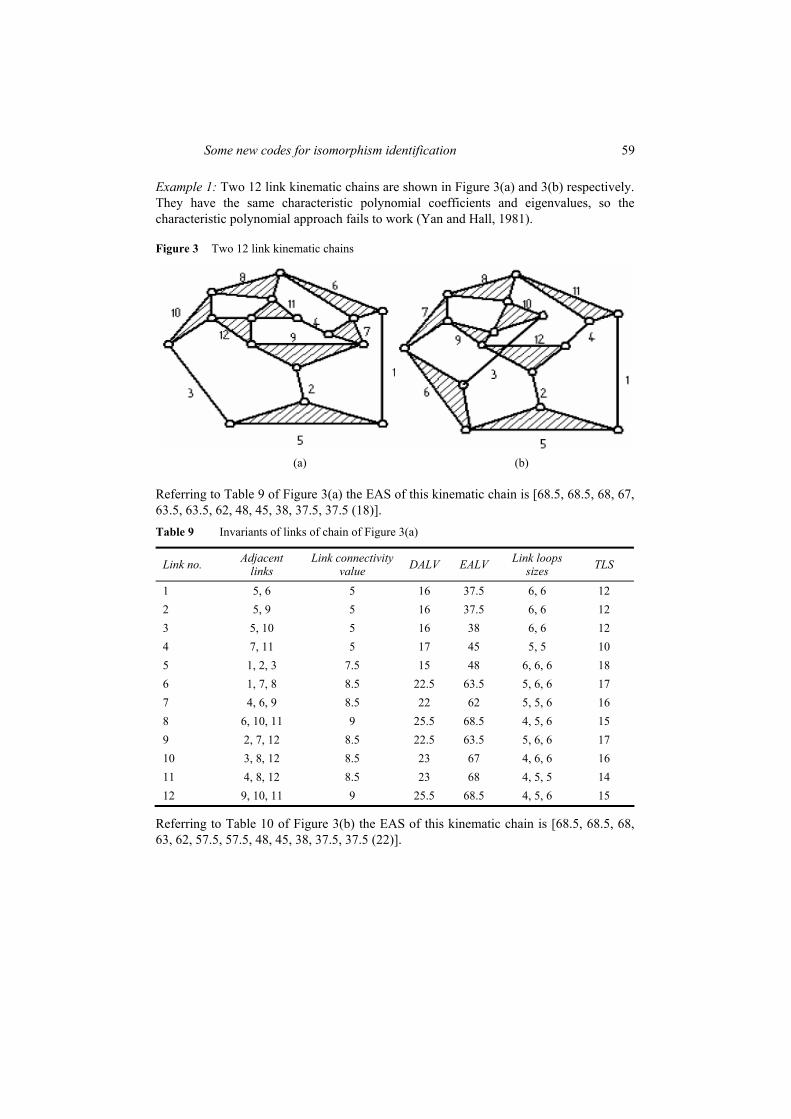
Example 2: Two 9-link 2-F kinematic chains are shown in Figures 4(a) and 4(b) respectively. Chain of Figure 4(a) is redrawn as chain of Figure 4(b) and its links are also labelled arbitrarily.
Figure 4 Two 9-link isomorphic kinematic chains
(a) (b)
Referring to Table 11 and Table 12 of Figures 4(a) and 4(b) respectively, these chains have the identical EAS [55.5, 53.5, 52.5, 49.5, 40, 36.5, 30, 27, 24.5, (18)] and hence they are isomorphic. It also proves that this test is not affected by redrawing a chain or by relabelling of various links of the chain.
Some new codes for isomorphism identification 61
Table 11 Invariants of links of chain of Figure4(a)
Link no. Adjacent links Link connectivity
value DALV EALV Link loops sizes TLS
1 3, 4, 5 8.5 21.5 55.5 4, 5, 6 15 2 3, 4, 6 8 18.5 53.5 4, 5, 7 16 3 1, 2, 7 8.5 21 52.5 4, 6, 7 17 4 1, 2 5 16.5 40 4, 5 9 5 1, 6, 9 8 18 49.5 5, 6, 7 18 6 2, 5 5 16 36.5 5, 7 12 7 3, 8 4.5 12.5 30 6, 7 13 8 7, 9 4 9 24.5 6, 7 13 9 5, 8 4.5 12 27 6, 7 13
Table 12 Invariants of links of chain of Fig.4 (b)
Link no. Adjacent links Link connectivity value DALV EALV Link loops
sizes TLS
1 2, 5, 9 8 18 49.5 5, 6, 7 18 2 1, 3 5 16 36.5 5, 7 12 3 2, 4, 6 8 18.5 53.5 4, 5, 7 16 4 3, 5 5 16.5 40 4, 5 9 5 1, 4, 6 8.5 21.5 55.5 4, 5, 6 15 6 3, 5, 7 8.5 21 52.5 4, 6, 7 17 7 6, 8 4.5 12.5 30 6, 7 13 8 7, 9 4 9 24.5 6, 7 13 9 1, 8 4.5 12 27 6, 7 13
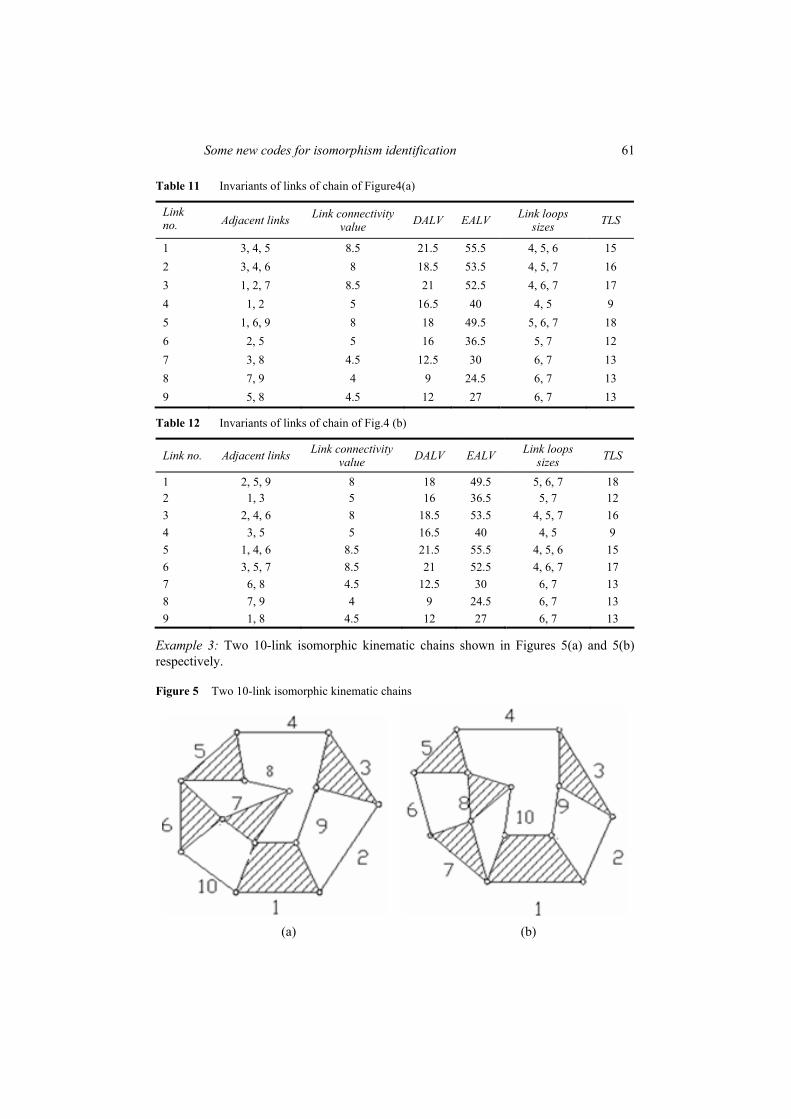
Example 3: Two 10-link isomorphic kinematic chains shown in Figures 5(a) and 5(b) respectively.
Figure 5 Two 10-link isomorphic kinematic chains
(a) (b)

62 A. Dargar et al.
These chains have the identical EAS [87, 65.5, 65, 55.5, 55, 48, 44.5, 41.5, 41.5, 34.5, (22)] and hence they are isomorphic as reported earlier by Kong et al. (1999).
5 Results
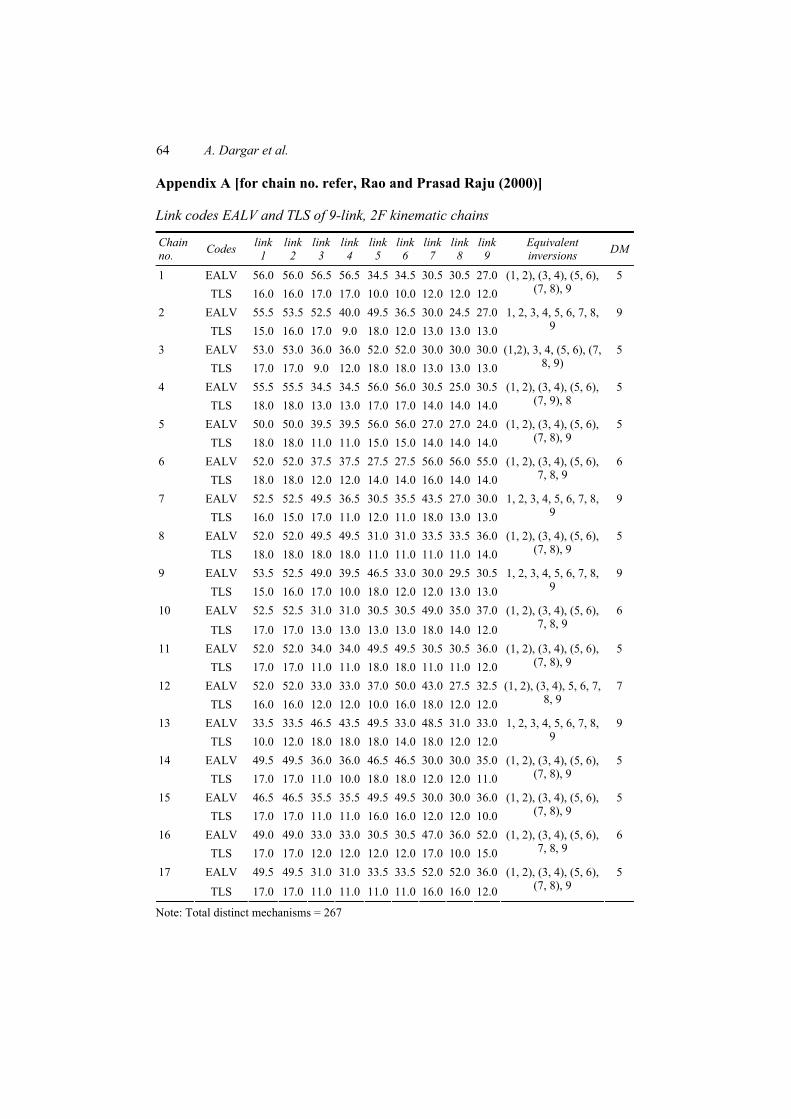
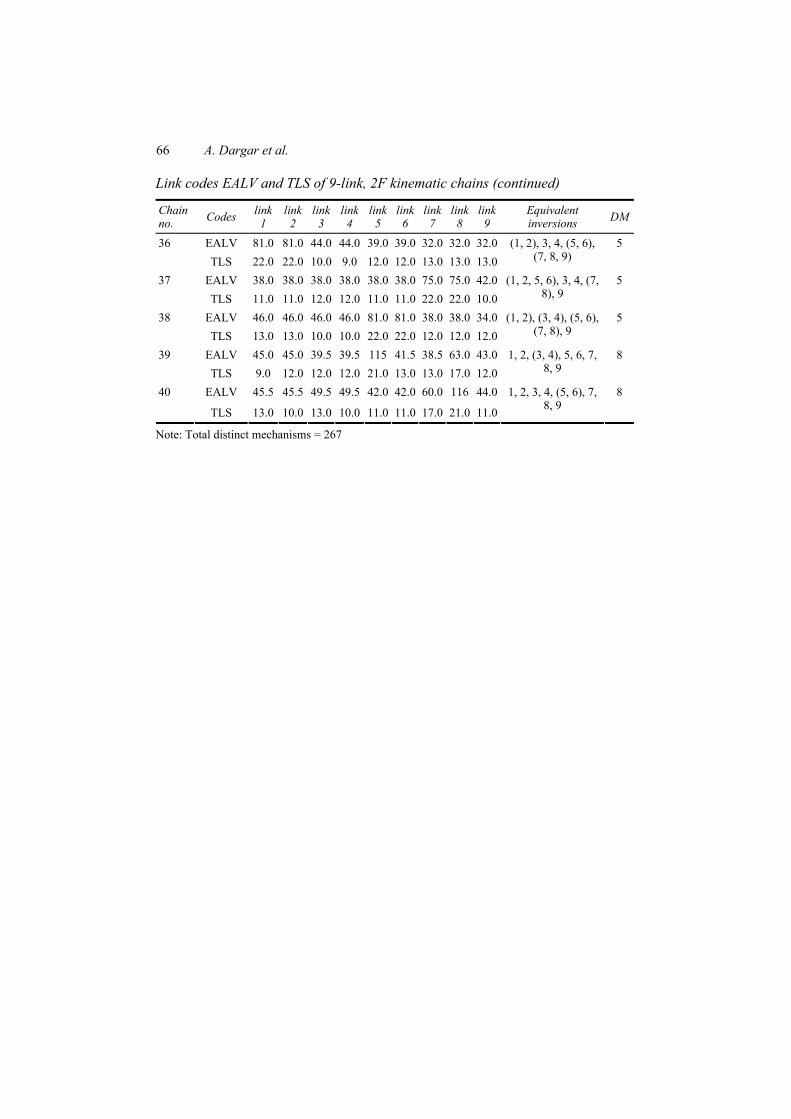
1 The total number of mechanisms derived from the family of 6-link, 1F; 8-link, 1F, and 10-link, 3F chains are 5, 71 and 684 respectively. These results are in agreement those reported already in the literature. The derived distinct mechanisms from the family of 10-link, 1F and 9-link, 2F chains are 1,848 and 267 respectively. As an illustration, a list of all 267 distinct mechanisms of 9-link, 2F chains is given in Appendix A along with the structural codes of various links.
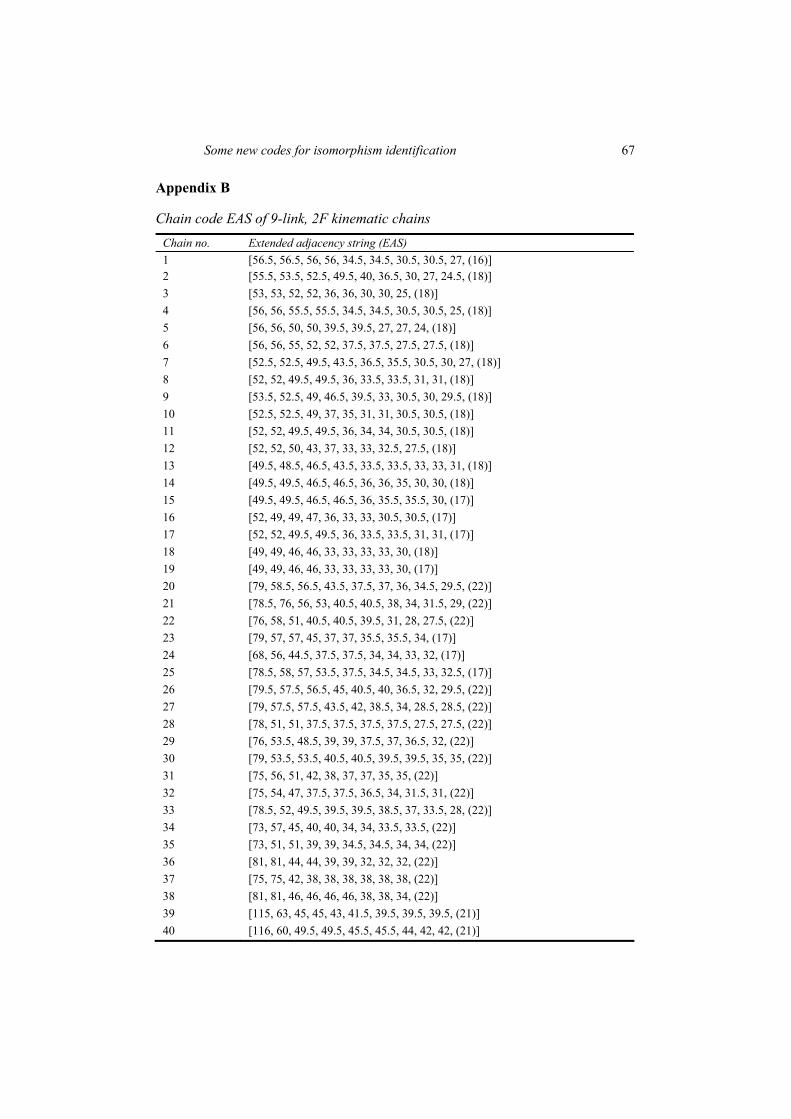
2 All the 8-link, 1F, 10-link, 1F, 9-link, 2F, and 10-link 3F kinematic chains have been tested successfully for their non-isomorphism. As an illustration, a list of all 40 EAS, 9-link, 2F chains is given in Appendix B.
6 Conclusions
In the present work using the concept of weighed structural matrices a method has been proposed to reveal simultaneously link is isomorphic and chain is isomorphic. Compared with other methods for isomorphism identification, this method has the following merits:
1 It is unique as, it incorporates all basic features of the chain and it taken care of not only the first adjacency of links but also higher order adjacency of links to complete specify the necessary and sufficient conditions for isomorphism identification.
2 This method is extremely simple, since for arithmetic computation there is no need of sophisticated algorithms. Furthermore, anyone with an elementary knowledge of computer can write the program required for executing this method.
3 The code EAS does not change even when the chain is redrawn and labelled in different ways.
4 This method is capable to explore simultaneously isomorphism between chains and among inversions of a chain in a single stroke.
References Ambekar, A.G. and Agrawal, V.P. (1987) ‘Canonical numbering of kinematic chains and
isomorphism problem: min code’, Mech. Mach. Theory, Vol. 22, No. 5, pp.453–461. Chang, Z.Y., Zhang, C. and Yang, Y.H. (2002) ‘A new method to mechanism kinematic chain
isomorphism identification’, Mech. Mach. Theory, Vol. 37, No. 4, pp.411–417. Chu, J.K. and Cao, W.Q. (1994) ‘Identification of isomorphism among kinematic chains and
inversions using link’s adjacent chain table’, Mech. Mach. Theory, Vol. 29, pp.53–58. Cubillo, J.P. and Wan, J.B. (2005) ‘Comments on mechanism kinematic chain isomorphism
identification using adjacent matrices’, Mech. Mach. Theory, Vol. 40, No. 2, pp.131–139.
Some new codes for isomorphism identification 63
Dargar, A., Hasan, A. and Khan R.A. (2010) ‘Application of link adjacency values to detect isomorphism among kinematic chains’, Int. J. Mech. and Mate. in Design, Vol. 6, No. 1, pp.157–162.
Ding, H. and Huang, Z. (2009) ‘Isomorphism identification of graphs: especially for the graphs of kinematic chains’, Mech. Mach. Theory, Vol. 44, No. 1, pp.122–139.
Hasan, A. and Khan, R.A. (2008) ‘Isomorphism and inversions of kinematic chains up to ten links using degrees of freedom of kinematic pairs’, Int. J. Computational Methods, Vol. 5, No. 2, pp.329–339.
He, P.R., Zhang, W.J. and Li, Q. (2005) ‘Some further development on the eigen system approach for graph isomorphism detection’, J. Franklin Inst., Vol. 342, No. 1, pp.657–673.
Hsu, C.H. (1993a) ‘A graph representationfor the structural synthesis of geared kinematic chains’, J. Franklin Inst., Vol. 330, No. 1,pp.131–143.
Hsu, C.H. (1993b) ‘Synthesis of kinematic structure of planetary gear trains by admissible graph method’, J. Franklin Inst., Vol. 330, No. 5, pp.913–927.
Hsu, C.H. and Lam, K.T. (1992) ‘Topological code of graphs’, J. Franklin Inst., Vol. 329, No. 1, pp.99–109.
Kong, F.G., Li, Q. and Zhang, W.J. (1999) ‘An artificial neural network approach to mechanism kinematic chain isomorphism identification’, Mech. Mach. Theory, Vol. 34, No. 2, pp.271–283.
Mruthyunjaya, T.S. (1984a) ‘A computerized methodology for structural synthesis of kinematic chains: Part 2: Application to several fully or partially known cases’, Mech. Mach. Theory, Vol. 19, No. 6, pp.497–505.
Mruthyunjaya, T.S. (1984b) ‘A computerized methodology for structural synthesis of kinematic chains: Part 3: Application to new case of 10-link three freedom chains’, Mech. Mach. Theory, Vol. 19, No. 6, pp.507–530.
Mruthyunjaya, T.S. (2003) ‘Kinematic structure of mechanisms revisited’, Mech. Mach. Theory, Vol. 38, No. 4, pp.279–320.
Mruthyunjaya, T.S. and Balasubramanian, H.R (1987) ‘In quest of a reliable and efficient computational test for detection of isomorphism in kinematic chains’, Mech. Mach. Theory, Vol. 22, No. 2, pp.131–140.
Rao, A.C. (2000) ‘Genetic algorithm for topological characteristics of kinematic chains’, ASME J. Mech. Des., Vol. 122, No. 2, pp.228–231.
Rao, A.C. and Prasad Raju, V.V.N.R. (2000) ‘Loop based detection of isomorphism among chains, inversions and type of freedom in multi degree of freedom chains’, ASME J. Mech. Des., Vol. 122, No. 1, pp.31–41.
Rao, A.C. and Rao, C.N. (1993a) ‘Loop based pseudo hamming values – I: Testing isomorphism and rating of kinematic chains’, Mech. Mach. Theory, Vol. 28, No. 1, pp.113–127.
Rao, A.C. and Rao, C.N. (1993b) ‘Loop based pseudo hamming values – II: Inversions preferred frames and actuators’, Mech. Mach. Theory, Vol. 28, No. 1, pp.129–143.
Sunkari, R.P. and Schmidt, L.C. (2006) ‘Reliability and efficiency of the existing spectral methods for isomorphism detection’, ASME J. Mech. Des., Vol. 128, No. 6, pp.1246–1252.
Uicker, J.J. and Raicu, A. (1975) ‘A method for the identification of and recognition of equivalence of kinematic chains’, Mech. Mach. Theory, Vol. 10, No. 5, pp.375–383.
Yan, H.S. and Hall, A.S. (1981) ‘Linkage characteristic polynomials: definitions, coefficients by inspection’, ASME J. Mech. Des., Vol. 103, No. 3, pp.578–584.
Yan, H.S. and Hall, A.S. (1982) ‘Linkage characteristic polynomials: assembly, theorems, uniqueness’, ASME J. Mech. Des., Vol. 104, No. 1, pp.11–20.
64 A. Dargar et al.
Appendix A [for chain no. refer, Rao and Prasad Raju (2000)]
Link codes EALV and TLS of 9-link, 2F kinematic chains
Chain no. Codes link
1 link 2
link 3
link 4
link 5
link 6
link 7
link 8
link 9
Equivalent inversions DM
EALV 56.0 56.0 56.5 56.5 34.5 34.5 30.5 30.5 27.01 TLS 16.0 16.0 17.0 17.0 10.0 10.0 12.0 12.0 12.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 55.5 53.5 52.5 40.0 49.5 36.5 30.0 24.5 27.02 TLS 15.0 16.0 17.0 9.0 18.0 12.0 13.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 53.0 53.0 36.0 36.0 52.0 52.0 30.0 30.0 30.03 TLS 17.0 17.0 9.0 12.0 18.0 18.0 13.0 13.0 13.0
(1,2), 3, 4, (5, 6), (7, 8, 9)
5
EALV 55.5 55.5 34.5 34.5 56.0 56.0 30.5 25.0 30.54 TLS 18.0 18.0 13.0 13.0 17.0 17.0 14.0 14.0 14.0
(1, 2), (3, 4), (5, 6), (7, 9), 8
5
EALV 50.0 50.0 39.5 39.5 56.0 56.0 27.0 27.0 24.05 TLS 18.0 18.0 11.0 11.0 15.0 15.0 14.0 14.0 14.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 52.0 52.0 37.5 37.5 27.5 27.5 56.0 56.0 55.06 TLS 18.0 18.0 12.0 12.0 14.0 14.0 16.0 14.0 14.0
(1, 2), (3, 4), (5, 6), 7, 8, 9
6
EALV 52.5 52.5 49.5 36.5 30.5 35.5 43.5 27.0 30.07 TLS 16.0 15.0 17.0 11.0 12.0 11.0 18.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 52.0 52.0 49.5 49.5 31.0 31.0 33.5 33.5 36.08 TLS 18.0 18.0 18.0 18.0 11.0 11.0 11.0 11.0 14.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 53.5 52.5 49.0 39.5 46.5 33.0 30.0 29.5 30.59 TLS 15.0 16.0 17.0 10.0 18.0 12.0 12.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 52.5 52.5 31.0 31.0 30.5 30.5 49.0 35.0 37.010
TLS 17.0 17.0 13.0 13.0 13.0 13.0 18.0 14.0 12.0
(1, 2), (3, 4), (5, 6), 7, 8, 9
6
11 EALV 52.0 52.0 34.0 34.0 49.5 49.5 30.5 30.5 36.0 5 TLS 17.0 17.0 11.0 11.0 18.0 18.0 11.0 11.0 12.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
EALV 52.0 52.0 33.0 33.0 37.0 50.0 43.0 27.5 32.512 TLS 16.0 16.0 12.0 12.0 10.0 16.0 18.0 12.0 12.0
(1, 2), (3, 4), 5, 6, 7, 8, 9
7
EALV 33.5 33.5 46.5 43.5 49.5 33.0 48.5 31.0 33.013 TLS 10.0 12.0 18.0 18.0 18.0 14.0 18.0 12.0 12.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 49.5 49.5 36.0 36.0 46.5 46.5 30.0 30.0 35.014 TLS 17.0 17.0 11.0 10.0 18.0 18.0 12.0 12.0 11.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 46.5 46.5 35.5 35.5 49.5 49.5 30.0 30.0 36.015 TLS 17.0 17.0 11.0 11.0 16.0 16.0 12.0 12.0 10.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 49.0 49.0 33.0 33.0 30.5 30.5 47.0 36.0 52.016 TLS 17.0 17.0 12.0 12.0 12.0 12.0 17.0 10.0 15.0
(1, 2), (3, 4), (5, 6), 7, 8, 9
6
EALV 49.5 49.5 31.0 31.0 33.5 33.5 52.0 52.0 36.017
TLS 17.0 17.0 11.0 11.0 11.0 11.0 16.0 16.0 12.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
Note: Total distinct mechanisms = 267

Some new codes for isomorphism identification 65
Link codes EALV and TLS of 9-link, 2F kinematic chains (continued)
Chain no. Codes link
1 link 2
link 3
link 4
link 5
link 6
link 7
link 8
link 9
Equivalent inversions DM
EALV 33.0 33.0 33.0 33.0 49.0 49.0 46.0 46.0 30.018 TLS 11.0 11.0 11.0 11.0 18.0 18.0 18.0 18.0 14.0
(1, 2, 3, 4), (5, 6), (7, 8), 9
4
EALV 33.0 33.0 33.0 33.0 49.0 49.0 46.0 46.0 30.019 TLS 11.0 11.0 11.0 11.0 16.0 16.0 17.0 17.0 12.0
(1, 2, 3, 4), (5, 6), (7, 8), 9
4
EALV 79.0 58.5 56.5 43.5 37.5 36.0 37.0 29.5 34.520 TLS 22.0 17.0 17.0 9.0 13.0 13.0 13.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 40.5 40.5 56.0 78.5 53.0 38.0 34.0 29.0 31.521 TLS 9.0 12.0 17.0 22.0 18.0 13.0 13.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 40.5 40.5 58.0 76.0 39.5 51.0 31.0 28.0 27.522 TLS 9.0 11.0 16.0 22.0 11.0 18.0 13.0 13.0 13.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 57.0 57.0 35.5 35.5 37.0 37.0 79.0 45.0 34.023 TLS 17.0 17.0 10.0 10.0 11.0 11.0 16.0 12.0 11.0
(1, 2), (3, 4), (5, 6), 7, 8, 9
6
EALV 37.5 37.5 34.0 34.0 56.0 68.0 32.0 44.5 33.024 TLS 12.0 9.0 12.0 12.0 17.0 17.0 13.0 17.0 12.0
1, 2, (3, 4),, 5, 6, 7, 8, 9
8
EALV 34.5 34.5 53.5 32.5 37.5 57.0 58.0 78.5 33.025 TLS 11.0 11.0 13.0 10.0 10.0 17.0 17.0 17.0 11.0
(1, 2), 3, 4,, 5, 6, 7, 8, 9
8
EALV 56.5 45.0 40.0 40.5 79.5 57.5 32.0 29.5 36.526 TLS 18.0 13.0 10.0 10.0 22.0 17.0 12.0 12.0 12.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 57.5 43.5 38.5 42.0 57.5 79.0 28.5 28.5 34.027 TLS 18.0 12.0 10.0 10.0 16.0 22.0 12.0 12.0 12.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 37.5 37.5 37.5 37.5 51.0 51.0 27.5 27.5 78.028
TLS 11.0 11.0 11.0 11.0 18.0 18.0 14.0 14.0 22.0
(1, 2, 3, 4), (5, 6), (7, 8,) 9
4
29 EALV 76.0 53.5 39.0 37.5 39.0 37.0 48.5 32.0 36.5 9 TLS 22.0 17.0 11.0 11.0 12.0 13.0 18.0 11.0 11.0
1, 2, 3, 4, 5, 6, 7, 8, 9
30 EALV 53.5 53.5 39.5 39.5 40.5 40.5 35.0 35.0 79.0 4 TLS 18.0 18.0 13.0 13.0 13.0 13.0 14.0 14.0 22.0
(1, 2, 3, 4), (5, 6), (7, 8), 9
EALV 37.0 37.0 35.0 35.0 38.0 42.0 51.0 56.0 75.031 TLS 11.0 13.0 11.0 13.0 11.0 11.0 18.0 16.0 22.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 37.5 37.5 54.0 75.0 36.5 31.0 47.0 31.5 34.032 TLS 11.0 10.0 17.0 22.0 11.0 13.0 18.0 12.0 12.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 39.5 39.5 52.0 78.5 49.5 28.0 33.5 38.5 37.033 TLS 12.0 10.0 18.0 22.0 18.0 14.0 14.0 12.0 12.0
1, 2, 3, 4, 5, 6, 7, 8, 9
9
EALV 40.0 40.0 34.0 34.0 33.5 33.5 45.0 73.0 57.034 TLS 10.0 10.0 12.0 12.0 12.0 12.0 18.0 22.0 16.0
(1, 2), (3, 4), (5, 6), 7, 8, 9
6
EALV 51.0 51.0 39.0 39.0 34.0 34.0 34.5 34.5 73.035
TLS 17.0 17.0 10.0 10.0 12.0 12.0 12.0 12.0 22.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
Note: Total distinct mechanisms = 267
66 A. Dargar et al.
Link codes EALV and TLS of 9-link, 2F kinematic chains (continued)
Chain no. Codes link
1 link 2
link 3
link 4
link 5
link 6
link 7
link 8
link 9
Equivalent inversions DM
EALV 81.0 81.0 44.0 44.0 39.0 39.0 32.0 32.0 32.036 TLS 22.0 22.0 10.0 9.0 12.0 12.0 13.0 13.0 13.0
(1, 2), 3, 4, (5, 6), (7, 8, 9)
5
EALV 38.0 38.0 38.0 38.0 38.0 38.0 75.0 75.0 42.037 TLS 11.0 11.0 12.0 12.0 11.0 11.0 22.0 22.0 10.0
(1, 2, 5, 6), 3, 4, (7, 8), 9
5
EALV 46.0 46.0 46.0 46.0 81.0 81.0 38.0 38.0 34.038 TLS 13.0 13.0 10.0 10.0 22.0 22.0 12.0 12.0 12.0
(1, 2), (3, 4), (5, 6), (7, 8), 9
5
EALV 45.0 45.0 39.5 39.5 115 41.5 38.5 63.0 43.039 TLS 9.0 12.0 12.0 12.0 21.0 13.0 13.0 17.0 12.0
1, 2, (3, 4), 5, 6, 7, 8, 9
8
EALV 45.5 45.5 49.5 49.5 42.0 42.0 60.0 116 44.040
TLS 13.0 10.0 13.0 10.0 11.0 11.0 17.0 21.0 11.0
1, 2, 3, 4, (5, 6), 7, 8, 9
8
Note: Total distinct mechanisms = 267
Some new codes for isomorphism identification 67
Appendix B
Chain code EAS of 9-link, 2F kinematic chains Chain no. Extended adjacency string (EAS) 1 [56.5, 56.5, 56, 56, 34.5, 34.5, 30.5, 30.5, 27, (16)] 2 [55.5, 53.5, 52.5, 49.5, 40, 36.5, 30, 27, 24.5, (18)] 3 [53, 53, 52, 52, 36, 36, 30, 30, 25, (18)] 4 [56, 56, 55.5, 55.5, 34.5, 34.5, 30.5, 30.5, 25, (18)] 5 [56, 56, 50, 50, 39.5, 39.5, 27, 27, 24, (18)] 6 [56, 56, 55, 52, 52, 37.5, 37.5, 27.5, 27.5, (18)] 7 [52.5, 52.5, 49.5, 43.5, 36.5, 35.5, 30.5, 30, 27, (18)] 8 [52, 52, 49.5, 49.5, 36, 33.5, 33.5, 31, 31, (18)] 9 [53.5, 52.5, 49, 46.5, 39.5, 33, 30.5, 30, 29.5, (18)] 10 [52.5, 52.5, 49, 37, 35, 31, 31, 30.5, 30.5, (18)] 11 [52, 52, 49.5, 49.5, 36, 34, 34, 30.5, 30.5, (18)] 12 [52, 52, 50, 43, 37, 33, 33, 32.5, 27.5, (18)] 13 [49.5, 48.5, 46.5, 43.5, 33.5, 33.5, 33, 33, 31, (18)] 14 [49.5, 49.5, 46.5, 46.5, 36, 36, 35, 30, 30, (18)] 15 [49.5, 49.5, 46.5, 46.5, 36, 35.5, 35.5, 30, (17)] 16 [52, 49, 49, 47, 36, 33, 33, 30.5, 30.5, (17)] 17 [52, 52, 49.5, 49.5, 36, 33.5, 33.5, 31, 31, (17)] 18 [49, 49, 46, 46, 33, 33, 33, 33, 30, (18)] 19 [49, 49, 46, 46, 33, 33, 33, 33, 30, (17)] 20 [79, 58.5, 56.5, 43.5, 37.5, 37, 36, 34.5, 29.5, (22)] 21 [78.5, 76, 56, 53, 40.5, 40.5, 38, 34, 31.5, 29, (22)] 22 [76, 58, 51, 40.5, 40.5, 39.5, 31, 28, 27.5, (22)] 23 [79, 57, 57, 45, 37, 37, 35.5, 35.5, 34, (17)] 24 [68, 56, 44.5, 37.5, 37.5, 34, 34, 33, 32, (17)] 25 [78.5, 58, 57, 53.5, 37.5, 34.5, 34.5, 33, 32.5, (17)] 26 [79.5, 57.5, 56.5, 45, 40.5, 40, 36.5, 32, 29.5, (22)] 27 [79, 57.5, 57.5, 43.5, 42, 38.5, 34, 28.5, 28.5, (22)] 28 [78, 51, 51, 37.5, 37.5, 37.5, 37.5, 27.5, 27.5, (22)] 29 [76, 53.5, 48.5, 39, 39, 37.5, 37, 36.5, 32, (22)] 30 [79, 53.5, 53.5, 40.5, 40.5, 39.5, 39.5, 35, 35, (22)] 31 [75, 56, 51, 42, 38, 37, 37, 35, 35, (22)] 32 [75, 54, 47, 37.5, 37.5, 36.5, 34, 31.5, 31, (22)] 33 [78.5, 52, 49.5, 39.5, 39.5, 38.5, 37, 33.5, 28, (22)] 34 [73, 57, 45, 40, 40, 34, 34, 33.5, 33.5, (22)] 35 [73, 51, 51, 39, 39, 34.5, 34.5, 34, 34, (22)] 36 [81, 81, 44, 44, 39, 39, 32, 32, 32, (22)] 37 [75, 75, 42, 38, 38, 38, 38, 38, 38, (22)] 38 [81, 81, 46, 46, 46, 46, 38, 38, 34, (22)] 39 [115, 63, 45, 45, 43, 41.5, 39.5, 39.5, 39.5, (21)] 40 [116, 60, 49.5, 49.5, 45.5, 45.5, 44, 42, 42, (21)]
Copyright © 2022 FDOKUMEN




















