Framework para el desarrollo de realidad aumentada para dispositivos móviles con sistema operativo...
125
Transcript of Framework para el desarrollo de realidad aumentada para dispositivos móviles con sistema operativo...

Framework para el Desarrollo deRealidad Aumentada para
Dispositivos Móviles con SistemaOperativo Android
Tesis para obtener el grado de
Maestro en Tecnologías de laInformación y Comunicaciones
Presentado por:
L. S. C. Jorge Stefan Cruz León
Directora de tesis:
M. en C. Jazmín Rodríguez Flores
Co-director:
M. en C. Josué Román Martínez Mireles
Zempoala, Hgo. México Septiembre 2014

Agradecimientos
Le agradezco a mis asesores: M. en C. Jazmín Rodriguez Flores y M. en C. Josúe
Román Martinez Mireles por el constante apoyo y dedicación brindada para concluir
satisfactoriamente la maestría.
A mis sinodales, el Dr. Julio César Salgado Ramirez, M. en C. Marco Antonio Gar-
cía Márquez y M. en C. José Juan Zarate Corona por los consejos y observaciones
otorgadas que sirvieron para desarrollar adecuadamente el proyecto de maestría.
A mis padres y a mi hermano por el constante apoyo y buenos deseos que siempre me
han dado y que se ven recompensados al término de éste ciclo, a Alma por que a pesar
de todos los contratiempos y di�cultades siempre ha estado a mi lado incondicional-
mente, a Rubén y Rodrigo por que son la perfecta inspiración para cumplir todos mis
objetivos en la vida, por entender esas largas ausencias y periodos de estrés y aún así
al �nal del día siempre están ahí con un beso, un abrazo y unas palabras de amor que
siempre me alientan a seguir adelante.
A mis compañeros y amigos de la maestría por compartir momentos inolvidables a
mi lado, a la Universidad Politécnica de Pachuca por brindarme un espacio en sus
instalaciones para continuar con mi formación profesional.
Al Consejo Nacional de Ciencia y Tecnología por brindarme el apoyo de la beca número
338861 con número de registro 275030 sin el cual no hubiera podido realizar el proyecto
de investigación.

Resumen
En el presente documento se describe el desarrollo del proyecto de investigación que
lleva como título �Framework para el Desarrollo de Realidad Aumentada para Dis-
positivos Móviles con Sistema Operativo Android� , el proyecto se estructuró en una
arquitectura constituída por 4 módulos: módulo de aplicación, módulo de procesa-
miento, módulo de almacenamiento de datos y módulo de captura y edición de video.
Para su elaboración se empleó el IDE Eclipse versión 4.2.1 con el plugin ADT versión
22.0.1 para el desarrollo en Android.
Se utilizó el algoritmo SURF que demostró un mejor desempeño en las pruebas de
detección de puntos de interés, detección ante cambios iluminación, rotación y escala
así como en tiempos de ejecución descritas en el análisis de algoritmos de reconoci-
miento de imágenes. El conjunto de pruebas del funcionamiento del algoritmo SURF
hizo posible el reconocimiento de marcadores no convencionales ante las condiciones
descritas. Se validó la correcta integración y funcionamiento del framework dado que
la aplicación de prueba permitió generar la realidad aumentada en un dispositivo móvil
combinando el reconocimiento de marcadores no convencionales y la geolocalización.

Contenido
1. Introducción 1
1.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.2. Objetivos especí�cos . . . . . . . . . . . . . . . . . . . . . . 4
1.4. Justi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.5. Propuesta de solución . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.6. Metodología . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.7. Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.8. Estructura general de la tesis . . . . . . . . . . . . . . . . . . . . . 10
2. Marco teórico 11
2.1. Arquitectura de software . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2. Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3. Dispositivos móviles . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1. Características de los dispositivos móviles . . . . . . . . . . 12
2.3.2. Sistemas operativos para dispositivos móviles . . . . . . . . 13
2.3.3. Comparativa entre sistemas operativos móviles . . . . . . . . 14
2.4. Realidad aumentada . . . . . . . . . . . . . . . . . . . . . . . . . . 15
i

2.4.1. Tareas de la realidad aumentada . . . . . . . . . . . . . . . 15
2.4.2. Tipos de realidad aumentada . . . . . . . . . . . . . . . . . 16
3. Arquitectura del framework 19
3.1. Arquitectura de referencia . . . . . . . . . . . . . . . . . . . . . . . 19
3.2. Arquitectura propuesta . . . . . . . . . . . . . . . . . . . . . . . . . 22
4. Módulo de procesamiento 25
4.1. Algoritmo de procesamiento de imágenes . . . . . . . . . . . . . . . 25
4.1.1. Determinación del algoritmo de procesamiento de imágenes . 26
4.1.2. Implementación del algoritmo SURF . . . . . . . . . . . . . 29
4.1.3. Pruebas y resultados de la implementación del algoritmo SURF 44
4.2. Geolocalización . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.1. Obtención de la lectura de geolocalización . . . . . . . . . . 59
5. Módulo de almacenamiento de datos 61
5.1. Pruebas y resultados del módulo de almacenamiento de datos . . . . 64
6. Módulo de captura y edición de video 67
6.1. Captura de video . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.2. Edición de video . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.3. Pruebas y resultados del módulo de captura y edición de video . . . . 70
7. Pruebas y resultados 73
7.1. Pruebas y resultados del framework . . . . . . . . . . . . . . . . . . 74
8. Conclusiones y trabajos futuros 81
8.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
8.2. Publicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
8.3. Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
ii

Referencias 85
A. Diagrama de clases de la arquitectura del framework 91
B. Arquitectura de Android 93
C. Guía para la implementación del framework 97
D. Publicación 103
iii

Página intencionalmente en blanco
iv

Índice de �guras
1.1. Metodología para el desarrollo del proyecto de investigación . . . . . 6
2.1. Realidad de Milgram-Virtuality Continuum . . . . . . . . . . . . . . 15
3.1. Arquitectura de referencia propuesta por Brüegge . . . . . . . . . . . 20
3.2. Arquitectura del framework . . . . . . . . . . . . . . . . . . . . . . 22
3.3. Módulo de aplicación . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4. Módulo de procesamiento . . . . . . . . . . . . . . . . . . . . . . . 23
3.5. Módulo de almacenamiento de datos . . . . . . . . . . . . . . . . . 24
3.6. Módulo de captura y edición de video . . . . . . . . . . . . . . . . . 24
4.1. Diagrama de �ujo algoritmo SURF . . . . . . . . . . . . . . . . . . 31
4.2. Cálculo de la imagen integral . . . . . . . . . . . . . . . . . . . . . 33
4.3. Aproximación de las derivadas parciales de segundo orden de las gaus-
sianas empleando �ltros de caja. Izquierda: derivadas parciales de segundo
orden de las gaussianas. Derecha: aproximación por �ltros de caja. . . . 34
4.4. Aproximación de las derivadas parciales de segundo orden de las gaus-
sianas mediante imágenes integrales . . . . . . . . . . . . . . . . . . 35
4.5. Asignación de puntos en las sumatorias en Dxx y Dyy . . . . . . . . 35
4.6. Pirámide del �ltro . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.7. Representación grá�ca de la longitud de los �ltros de diferentes octavas 37
4.8. Filtros de Haar empleados en el descriptor SURF (Color negro identi�ca
el valor de -1 y el blanco el valor de +1) . . . . . . . . . . . . . . . 39
v

4.9. Asignación de la orientación . . . . . . . . . . . . . . . . . . . . . . 40
4.10. Componentes del descriptor . . . . . . . . . . . . . . . . . . . . . . 41
4.11. Diagrama de �ujo emparejamiento de puntos de interés . . . . . . . 43
4.12. Comparativa entre dos imágenes con 2 octavas y 3 intervalos con
resolución de 320x240 (imagen izquierda) y 640x480 (imagen derecha) 45
4.13. Curva de la falsa aceptación y el falso rechazo para determinar el
umbral para la detección de puntos de interés . . . . . . . . . . . . 47
4.14. Curva de la falsa aceptación y el falso rechazo para determinar el
umbral de emparejamiento de imágenes . . . . . . . . . . . . . . . . 48
4.15. Curva de la falsa aceptación y el falso rechazo para determinar el
umbral de aceptación del emparejamiento de imágenes . . . . . . . . 49
4.16. Emparejamiento de imágenes con rotación . . . . . . . . . . . . . . 53
4.17. Emparejamiento de imágenes con cambio de escala . . . . . . . . . . 54
4.18. Emparejamiento de imágenes con cambio de iluminación . . . . . . . 55
4.19. Funcionamiento del GPS . . . . . . . . . . . . . . . . . . . . . . . . 57
4.20. Diagrama de �ujo para obtener la información de geolocalización . . 58
4.21. Aplicación de prueba para obtener la geolocalización del dispositivo . 59
5.1. Diagrama de �ujo para guardar un marcador . . . . . . . . . . . . . 63
5.2. Diagrama de �ujo para obtener la información de los marcadores . . 64
5.3. Prueba del módulo de almacenamiento de datos . . . . . . . . . . . 65
6.1. Diagrama de �ujo para la captura de video . . . . . . . . . . . . . . 68
6.2. Diagrama de �ujo para la edición de video . . . . . . . . . . . . . . 69
6.3. Prueba del módulo de captura y edición de video . . . . . . . . . . . 71
6.4. Superposición de información en la visualización de pantalla . . . . . 71
7.1. Pantalla de inicio de la aplicación de prueba . . . . . . . . . . . . . 74
7.2. Pantalla para guardar un marcador en el módulo de almacenamiento . 75
vi

7.3. Acceso a la galería del dispositivo . . . . . . . . . . . . . . . . . . . 77
7.4. Guargar la información del marcador en el módulo de almacenamiento 77
7.5. Ver registro almacenado en el módulo de almacenamiento . . . . . . 77
7.6. Realidad aumentada en el dispositivo móvil marcador 1 . . . . . . . . 78
7.7. Realidad aumentada en el dispositivo móvil marcador 2 . . . . . . . . 79
A.1. Diagrama de clases de la arquitectura del framework . . . . . . . . . 92
B.1. Arquitectura de Android obtenido de [50] . . . . . . . . . . . . . . 93
vii

Página intencionalmente en blanco
viii

Índice de tablas
1.1. Análisis de las principales características de los Frameworks . . . . . 7
2.1. Análisis de los sistemas operativos de los dispositivos móviles . . . . 14
4.1. Extracto de la comparativa de funcionamiento entre el algoritmo SIFT
y SURF expuesto en [41] . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2. Ventajas e inconvenientes de los descriptores analizados en [40] . . . 28
4.3. Costo computacional de los descriptores analizados en [40] . . . . . . 29
4.4. Comparación entre puntos de interés detectados en imágenes con di-
ferente resolución y cambios en octavas e intervalos . . . . . . . . . 44
4.5. Comparativa de tiempos de ejecución del algoritmo entre diversos dis-
positivos (resultados medidos en segundos) . . . . . . . . . . . . . 45
4.6. Sensibilidad y 1-especi�cidad para generar curva ROC para determinar
el umbral para la detección de los puntos de interés . . . . . . . . . 50
4.7. Sensibilidad y 1-especi�cidad para generar curva ROC para determinar
el umbral para el emparejamiento de imágenes . . . . . . . . . . . . 51
4.8. Sensibilidad y 1-especi�cidad para generar curva ROC para determinar
el umbral de aceptación para el emparejamiento de imágenes . . . . . 52
4.9. Cambios de rotación para el emparejamiento de imágenes . . . . . . 53
4.10. Cambios de escala para el emparejamiento de imágenes . . . . . . . 54
4.11. Cambios de iluminación para el emparejamiento de imágenes . . . . . 55
5.1. Tipos de datos permitidos por SQLite . . . . . . . . . . . . . . . . . 61
ix

5.2. Métodos empleados de la clase SQLiteOpenHelper . . . . . . . . . . 62
5.3. Campos empleados en el módulo de almacenamiento de datos . . . 62
6.1. Librerías empleadas para la captura de video . . . . . . . . . . . . . 67
6.2. Librerías empleadas para la edición de video . . . . . . . . . . . . . . 69
7.1. Dispositivos móviles empleados para las pruebas de funcionamiento del
framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
x

Índice de Códigos Fuente
7.1. Pantalla de inicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.2. Guardar un marcador en el módulo de almacenamiento . . . . . . . . 76
7.3. Acceder al módulo de captura y edición de video . . . . . . . . . . . 78
C.1. AndroidManifest . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
C.2. Inicializar una instancia de la clase Manejador . . . . . . . . . . . . . 98
C.3. Método onClick del botón para tomar una fotografía . . . . . . . . . 98
C.4. Método para tomar fotografía . . . . . . . . . . . . . . . . . . . . . 98
C.5. Método onClick para el bóton buscar imagen . . . . . . . . . . . . . 99
C.6. Método onActivityResult . . . . . . . . . . . . . . . . . . . . . . . . 100
C.7. Método onClick del botón para almacenar un marcador . . . . . . . 100
C.8. Método para guardar una foto . . . . . . . . . . . . . . . . . . . . . 100
C.9. Método onClick del botón para consultar registros . . . . . . . . . . 101
C.10.Método para consultar registros . . . . . . . . . . . . . . . . . . . . 101
C.11. Inicializar una instancia de la clase Salida . . . . . . . . . . . . . . . 102
C.12.Visualizar video . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
C.13.Visualizar video procesado . . . . . . . . . . . . . . . . . . . . . . . 102
xi

Página intencionalmente en blanco
xii

Capítulo 1
Introducción
Oliver Bimber de�ne en su libro �Spatial Augmented Reality� expuesto en [1] que los
sistemas de realidad aumentada son aquellos sistemas que mezclan información virtual
de cualquier tipo, desde imágenes 2D, texto o �guras 3D con un escenario físico real.
Para combinar la información virtual con el entorno real se requieren los siguientes
elementos: una cámara que capta las imágenes del mundo real, software que reali-
za el procesamiento de la imagen recibida y genera la realidad aumentada, así como
una pantalla que muestra al usuario la información �nal, además se pueden emplear
otras tecnologías como acelerómetros, GPS, giroscópios, brújulas, etc. Por lo tanto,
es posible generar las aplicaciones de realidad aumentada para dispositivos móviles
ya que cuentan con el hardware y software necesario para llevarlas a cabo, como lo
demuestran Abril y Carmigniani en [2, 3] en donde exponen que debido a la portabi-
lidad de los dispositivos móviles, es posible utilizar la realidad aumentada en diversos
ámbitos, como lo son: publicidad (donde se muestran las características de productos,
ubicaciones de tiendas y servicios más cercanos), educación (mediante aplicaciones en
museos, parques temáticos, exposiciones, tutoriales), medicina (mediante la simula-
ción de procedimientos quirúrgicos) y entretenimiento (como aplicaciones de juegos,
simuladores y geolocalización). Así mismo, para desarrollar aplicaciones de realidad
aumentada que utilicen marcadores no convencionales se requiere el empleo de algo-
ritmos de reconocimiento de imágenes, para lo cual la velocidad del procesamiento de
detección, el tamaño, así como el entorno para funcionar adecuadamente in�uyen en
la elección del mismo para emplearlo en el desarrollo de éste tipo de aplicaciones.
En el presente trabajo de investigación se determinó emplear el algoritmo SURF (por
1

las siglas en inglés de Speeded Up Robust Features) con base en la robustez del
algoritmo, donde destaca la velocidad de cálculo de puntos de interés sin pérdida de
rendimiento, así como la invarianza ante cambios de rotación, traslación, escala y
cambios de iluminación, lo cual es de suma importancia para la implementación en un
dispositivo móvil.
1.1. Antecedentes
Abril, Carmigniani y Loup exponen en [2, 3, 4] que los trabajos realizados en el ámbito
de la realidad aumentada se remontan al año de 1950 cuando el cineasta Morton
Heilig escribió sobre un �Cine de experiencia� en el cual se podría hacer participe al
espectador integrando sus sentidos a lo que estuviera observando en la pantalla, ésto
lo llevó a desarrollar en el año de 1962 un prototipo llamado �Sensorama� el cual
integraba los sentidos del espectador (oido, olfato, vista y tacto) a 5 �lmes que se
reproducian en la pantalla. Más tarde, en 1966 Ivan Sutherland construyó el primer
visor montable en la cabeza (Head Mounted Display), como menciona en [5] permitía
interactuar con la realidad virtual y la realidad aumentada. En 1972 Myron Krueger
crea Videoplace el cual como explica en su publicación expuesta en [6] permitía a los
usuarios relacionarse con objetos virtuales los cuales respondían a sus movimientos y
acciones. Los primeros guantes y lentes de realidad virtual fueron desarrollados a �nales
de los 80 por Jaron Lanier, con lo cual creó la frase de realidad virtual para la tecnología
desarrollada, así mismo, en 1990 Tom Caudell y David Mizell en su artículo mostrado
en [7] de�nen el término de realidad aumentada al superponer tableros virtuales sobre
tableros físicos con lo cual �aumentaba� la información mostrada percibiéndola con
unos anteojos especiales. En 1992 Steven Feiner, Blair MacIntyre y Doree Seligmann
desarrollaron KARMA el cual es el primer prototipo de relevancia con el empleo de
realidad aumentada, como lo muestran en su publicación expuesta en [8].
En cuanto al empleo de información geográ�ca para la realidad aumentada, en 1993
Loomis, Colledge y Klatzky desarrollaron un sistema prototipo que empleaba un GPS
y una brújula electrónica para la movilidad en exteriores de personas con discapacidad
visual y proporcionaba asistencia por medio de una �pantalla acústica virtual� como
lo mencionan en [9].
El desarrollo de realidad aumentada en dispositivos móviles tiene sus inicios en 1995
2

cuando se publica el trabajo �El mundo a través del equipo, interacción aumentada
con entornos del mundo real� desarrollado por Jun Rekimoto y Katashi Nagao en
[10], donde se propone el empleo de un dispositivo móvil para crear entornos grá�cos
aumentados. En el 2000, Bruce H. Thomas en [11] crea ArQuake el cual es el primer
juego de realidad aumentada al aire libre con dispositivos móviles. En el 2008 surge AR
Wikitude Guia, aplicación que trabajaba en un dispositivo móvil con sistema operativo
Android, con el empleo de la cámara permitía obtener información de alguna imagen
enfocada. En el año 2009 la empresa de desarrollo de realidad aumentada Total Im-
mersion crea el logo o�cial de la realidad aumentada para estandarizar la identi�cación
de ésta tecnología en cualquier contenido como lo muestra en [12].
1.2. Planteamiento del problema
De acuerdo con el estudio que realizó iabMéxico mostrado en [13] en el 2014 el 84% de
los habitantes en México cuenta con algún dispositivo móvil, siendo 4 de cada 10 dispo-
sitivos un smartphone. Éstos dispositivos son un nicho de oportunidad para diferentes
aplicaciones, debido a que el 77% de los usuarios descangan aplicaciones diversas,
algunas de ellas involucran técnicas de realidad aumentada con diversos enfoques, de
acuerdo con un estudio que realizó Juniper Research expuesto en [14] actualmente en
el mundo existen 60 millones de usuarios de realidad aumentada en smartphones y
se espera que para el año 2018 la cifra éste cerca de 200 millones de usuarios. Éstas
aplicaciones de realidad aumentada emplean marcadores y otros elementos como la
geolocalización para identi�car el momento en que mostrarán información, la cual de
manera general se encuentra almacenada en servidores externos al dispositivo, ésto
implica que se debe tener conectividad, así mismo los marcadores empleados deben
colocarse en determinada posición y tener características especí�cas lo que limita el
funcionamiento de la aplicación. Si bien se realizan pruebas como las descritas en [15]
donde se genera una aplicación de realidad aumentada mediante la implementación de
histogramas de color para el reconocimiento de imágenes, existen contratiempos para
adaptar la aplicación a entornos diferentes. Todo lo anterior brinda la oportunidad
para el el desarrollo del presente proyecto.
3

1.3. Objetivos
1.3.1. Objetivo general
Desarrollar un Framework de realidad aumentada para dispositivos móviles con sistema
operativo Android que permita combinar las técnicas de geolocalización y reconoci-
miento de marcadores no convencionales.
1.3.2. Objetivos especí�cos
Determinar el algoritmo de procesamiento de imágenes óptimo para el desarro-
llo de realidad aumentada con el empleo de marcadores no convencionales en
dispositivos móviles.
Implementar el algoritmo seleccionado para el desarrollo de realidad aumentada
combinándolo con la información de geolocalización del dispositivo.
Desarrollar los módulos de procesamiento, almacenamiento de datos y captura
y edición de video para el funcionamiento del framework.
Validar el funcionamiento del framework para el desarrollo de realidad aumentada
mediante un caso de prueba en un dispositivo móvil.
1.4. Justi�cación
De acuerdo al estudio OurMobile Planet realizado por Ipsos MediaCT y presentado
por Google México en 2012 expuesto en [16], la penetración de los Smarthphone en
el país es del 20%, sin embargo se estima que para el año 2015 este porcentaje se
incremente al 70%. El estudio que se presenta en [17] realizado por TomiAhonen
Consulting en 2011 indica que el sistema operativo móvil de mayor adquisición en el
mundo es Android con 31%, mientras que comScore en su informe que se denomina
Futuro digital Latinoamérica 2013 mostrado en [18] indica que los sistemas operativos
predominantes en México son iOS con 40.5% y Android con 40% .
El estudio mencionado en [19] sobre realidad aumentada realizado en 2011 a nivel
internacional que realiza la empresa de mercadeo tecnológico Hidden muestra el uso
4

que se le brinda a ésta tecnología: publicidad (folletos 19%, lanzamientos 18%, cam-
pañas en línea y conferencias 16%), comercio (puntos de venta 8%, probadores 7%,
contenido en línea 6%), ocio con un 5%, búsquedas GPS 3% y manuales con el
2%. El estudio también indica que al mes son lanzadas al mercado 35 aplicaciones de
realidad aumentada, de las cuales el 43% son gratuitas. Sin embargo, las caracterís-
ticas con que cuentan los dispositivos móviles no han permitido abarcar otras áreas
de enfoque, como se realiza con la realidad aumentada en equipos de cómputo. Con
las estadísticas mencionadas, contar con un framework de realidad aumentada para
dispositivos móviles permitiría abarcar un nuevo enfoque de mercado.
1.5. Propuesta de solución
Se propone desarrollar un framework para generar aplicaciones de realidad aumentada
en dispositivos móviles con sistema operativo android, que permita el reconocimiento
de marcadores no convencionales combinado con la información de geolocalización
para limitar los rangos de búsqueda de los marcadores almacenados y reducir los
tiempos de ejecución del proceso de reconocimiento de imágenes.
1.6. Metodología
Para desarrollar el proyecto de investigación y cumplir los objetivos planteados se siguió
la metodología que se muestra en la Figura 1.1.
5

Figura 1.1: Metodología para el desarrollo del proyecto de investigación
1.7. Estado del arte
A continuación se mencionan las aplicaciones de realidad aumentada que existen ac-
tualmente, ésto para analizar cuál es la aportación más adecuada que pueda brindar
el framework.
En [20] se expone Layar que es una aplicación comercial de realidad aumentada para
Android, se basa tanto en geolocalización como en marcadores, sin embargo, no mezcla
ambos procesos. Utiliza el GPS, la brújula y otros sensores del teléfono móvil para
proporcionar una visualización de varios puntos de interés ordenados por capas o
niveles, donde cada una maneja un aspecto diferente. Para poder instalarlo se requiere
sistema operativo Android 1.5 o superior o iOs 3.1 o superior, cámara digital, GPS,
brújula, acelerómetro y conexión a internet.
En [21] se presenta Mixare que es un navegador de realidad aumentada gratuito y de
código abierto (bajo la licencia GPLV3) que emplea el GPS, la brújula y la cámara
del dispositivo. Disponible para Android y para iPhone 3GS, muestra en la pantalla
6

la información que se encuentra alrededor del dispositivo, proveniente de Twitter y
wikipedia.
Look! es un software desarrollado como proyecto de �n de carrera de la universidad
Complutense de Madrid durante el curso académico 2010-2011 expuesto en [22]. Sus
autores son Sergio Bellón Alcarazo, Jorge Creixell Rojo y Angel Serrano Laguna. Es
un software libre bajo la licencia GPLV3 que ofrece servicios de localización tanto en
exteriores por medio de GPS así como en interiores utilizando señales WiFi.
En [23] se presenta el desarrollo de AndAR que es un framework desarrollado para fun-
cionar en Android. Se encuentra bajo la licencia GNU, por lo cual es de software libre.
Permite la superposición de objetos tridimensionales sobre un marcador convencional
reconocible por el sistema.
La Tabla 1.1 muestra una comparación entre el funcionamiento de LOOK!, Layar, Mi-
xare, AndAR y el framework propuesto, se indican cuales son las fortalezas y limitantes
de cada uno tomando en cuenta distintos aspectos, lo cual da un punto de partida para
los alcances requeridos por el framework a realizar, se analiza si el framework tiene
integración con la cámara del dispositivo, el empleo de marcadores convencionales,
no convencionales y la localización GPS así como el aumento de información en 2D
o 3D, como se observa en la tabla 1.1 el principal aporte del framework propuesto
es la utilización de marcadores no convencionales ya que ninguno de los frameworks
analizados cuenta con ésta característica.
Tabla 1.1: Análisis de las principales características de los FrameworksAplicación LOOK! LAYAR MIXARE AndAR Framework
Integración con cámara X X X X X
2D X X X X
3D X X X
Localización GPS X X X
Marcadores convencionales X X X
Marcadores no convencionales X
A continuación se presentan los trabajos de investigación relacionados con el desa-
rrollo de aplicaciones o frameworks de realidad aumentada que se analizaron para el
desarrollo del proyecto.
El estudio [24] realizado por Bernd Brügge analiza 18 diferentes sistemas de realidad
aumentada en dispositivos móviles. En este estudio, se compara el funcionamiento
7

de cada sistema, así como la arquitectura empleada para su desarrollo, muestra una
arquitectura de referencia, obtenida de la comparativa realizada. Ésta arquitectura de
referencia se basa en la unión de 6 módulos de información, donde cada uno realiza
una actividad en especí�co de la realidad aumentada.
En el trabajo [25] realizado por Behzadan se realiza un software que se llama UM-AR-
GPS-ROVER. El enfoque es la generación de objetos a través de realidad aumentada
de utilidad para la construcción. Este software utiliza un headmounted display (HMD)
equipado con un receptor GPS y seguidor de orientación, una laptop donde se realizan
los procedimientos y una videocámara. Mediante posicionamiento GPS y la orientación
del dispositivo se calcula la posición en la cual será mostrado el objeto aumentado y
la distancia entre la posición del objeto y del dispositivo GPS, para generar el grá�co
con la posición y tamaño adecuado. A pesar de considerar la arquitectura del proyecto
como móvil, se basa en la conjunción de diversos dispositivos, ligando a cada uno una
actividad en especí�co.
El artículo [26] elaborado por López Pombo explica diversas técnicas de desarrollo de
realidad aumentada en equipos de cómputo, las arquitecturas empleadas para cada
una de ellas, además de las situaciones idóneas en las cuales poder implementarlas. A
modo de ejemplo, desarrolla dos prototipos de sistemas de realidad aumentada para
móviles que emplean marcadores blanco y negro con formas rectangulares mediante el
desarrollo de algoritmos especí�cos, elaborados con base en el análisis de la información
de cada caso de estudio.
Domhan muestra en [23] el desarrollo del Framework de realidad aumentada AndAR,
el cual utiliza la librería ArtToolkit. Este framework permite el uso de marcadores
convencionales. Por último, genera una aplicación con reconocimiento de marcadores
rectangulares en tonos blanco y negro.
Turunen muestra en [27] una propuesta de relación entre redes sociales y la realidad
aumentada en dispositivos móviles al generar una aplicación de prueba denominada
LocTrac. El objetivo principal de la aplicación es permitir al usuario obtener la ubica-
ción de sus contactos pertenecientes a una red social, así como mostrar los contactos
más cercanos a su posición, sin embargo encuentra inconvenientes con las velocidades
de procesamiento y el posicionamiento del dispositivo.
El artículo [28] publicado por Jie Shen, muestra el desarrollo de una aplicación que
8

elimina el problema de la oclusión en torno a la realidad aumentada. Su análisis se basa
en la implementación del algoritmo SIFT y el algoritmo RANSAC. Tomando en cuenta
el contorno de los objetos que inter�eren en la muestra de la imagen aumentada, esta
imagen es generada detrás del objeto que se interpone. En ésta aplicación no es
necesario el uso de marcadores, por lo que los objetos generados pueden ser móviles
o deformables.
David Prochazka realiza en [29] una aplicación de realidad aumentada enfocada al
diseño de vehículos, en la cual el usuario carga la imagen de la parte del vehículo
que desea modi�car. Utiliza un algoritmo de reconocimiento de imágenes mediante la
implementación de un perceptrón multicapa, debido a la complejidad de procesamiento
de la red neuronal, esta es implementada en la nube y es entrenada con información
almacenada en una base de datos remota.
El trabajo [15] realizado por Chen Jing, Guo Junwei y Wang Yongtian muestra un
sistema de reconocimiento de imágenes para un museo mediante realidad aumentada
desarrollado en una ultra móvil PC, además utilizan histogramas HSV para reducir
la base de datos de búsqueda de imágenes y a través de un algoritmo de aprendizaje
supervisado realiza el reconocimiento de la imagen. Al realizar las pruebas necesarias se
tuvo aceptación con el uso de la tecnología y el dispositivo, sin embargo, la velocidad
de procesamiento fue lenta.
El artículo [30] elaborado por Gaip Weng muestra una propuesta de integración de
dos técnicas diferentes, la geolocalización con un algoritmo de reconocimiento de
características de imágenes (SURF) adaptado a dispositivos móviles, comparándolas
con otras, almacenadas en una base de datos. Las operaciones las realiza directamente
en el dispositivo móvil Iphone. Mediante el algoritmo de reconocimiento de imagen,
extrae las características necesarias de la imagen captada, comparándolas con otras
almacenadas en una base de datos local del sistema, si es encontrada, se procede a la
realización de la realidad aumentada.
Santoso realiza en [31] una aplicación mediante el uso de la realidad aumentada móvil
en la enseñanza, genera una aplicación basada en el juego tangram.
Jaegeol Yim muestra en [32] un artículo denominado Implementation of Building Re-
cognition Android App explica el desarrollo de una aplicación de reconocimiento de
9

edi�cios utilizando mapas electrónicos. En una base de datos local se tienen alma-
cenados los datos de localización de determinados edi�cios, mediante el dispositivo
móvil se toma una fotografía del entorno, también se captura la posición del dispo-
sitivo, a través de un algoritmo de reconocimiento de objetos se calcula la distancia
entre el dispositivo y el entorno captura y al comparar con los datos almacenados
en la base se obtiene el edi�cio que es observado y se muestra un video relacionado
con el mismo. La investigación surge de los errores de posicionamiento existentes al
utilizar la geolocalización en los dispositivos móviles, se comprueba que a través de
este procedimiento se evitan esos fallos.
En la actualidad se desarrollan aplicaciones de realidad aumentada empleando diversas
técnicas de reconocimiento de imágenes dependiendo el entorno donde se ejecutará la
aplicación, los principales objetivos de las investigaciones son: reducir los tiempos de
ejecución, reducir las capacidades de procesamiento y adaptarlas al dispositivo sobre
el que se ejecutarán, así como tener un óptimo reconocimiento de los marcadores
empleados y utilizar bases de datos que permitan un rápido acceso a la información.
1.8. Estructura general de la tesis
A continuación se menciona la organización del presente documento. En el capítulo
1 se presenta la introducción al proyecto. En el capítulo 2 se describen los conceptos
generales para el conocimiento de las características principales de los dispositivos
móviles y de la realidad aumentada. En el capítulo 3 se propone la arquitectura global
del framework así como la descripción de cada uno de los módulos que lo componen. En
el capítulo 4 se determina e implementa el algoritmo de reconocimiento de imágenes
y se explica la obtención de la información de geolocalización. En el capítulo 5 se
presenta el módulo de almacenamiento de datos. En el capítulo 6 se describe el módulo
de captura y edición de video. El capítulo 7 contiene las pruebas de funcionamiento y
los resultados obtenidos de la implementación del framework. Finalmente en el capítulo
8 se presentan y describen las conclusiones y trabajos futuros.
10

Capítulo 2
Marco teórico
La creciente demanda de comunicación entre las personas y localización de lugares, así
como la fácil adquisición de dispositivos móviles ha permitido el auge de aplicaciones
novedosas y de gran utilidad para el usuario, las cuales emplean al máximo los recursos
de los dispositivos, entre ellas la realidad aumentada. En este capítulo se muestra la
teoría que fundamenta al proyecto con base en la propuesta de solución.
2.1. Arquitectura de software
De acuerdo con la norma ISO/IEC/IEEE 42010 expuesta en [33] la arquitectura son
los conceptos fundamentales o propiedades de un sistema en un entorno que combina
sus elementos, relaciones y los principios de su diseño y evolución.
2.2. Framework
La de�nición de framework que establece la norma ISO/IECIEEE 42010 en [33] esta-
blece que un framework son las convenciones, principios y prácticas para la descripción
de arquitecturas, establecidos dentro de un dominio especí�co de aplicación o dentro
de un conjunto de elementos similares.
11

2.3. Dispositivos móviles
La tecnología móvil tiene como objetivos desarrollar dispositivos cada vez más peque-
ños y portables, así como incrementar su capacidad y la velocidad de procesamiento.
En [34] se de�ne al dispositivo móvil como un aparato portable, con velocidad de
procesamiento, acceso a redes WiFi, memoria limitada, diseñado especí�camente para
una función, pero que puede llevar a cabo otras funciones generales, la presente in-
vestigación se enfocará en los smartphones y tabletas por ser los dispositivos móviles
que se emplean en la actualidad.
2.3.1. Características de los dispositivos móviles
Algunos elementos utilizados para clasi�car los dispositivos móviles y que son de uti-
lidad para determinar el tipo de dispositivos sobre los que tendrá un mejor funcio-
namiento el framework a realizar, fueron propuestos por Arroyo en [35] y son los
siguientes:
Visualización: Esta característica permite que el usuario visualice el contenido
mediante los siguientes tres aspectos:
a) Profundidad del color: cantidad de bits necesarios para representar el color
de un pixel y se mide en bits por pixel (bpp).
b) Tecnología de la pantalla: in�uye en la comodidad para el manejo del
dispositivo, para facilitar la lectura del contenido o para el desplazamiento
dentro del mismo. Las pantallas táctiles son las mayormente producidas en
la actualidad.
c) Tamaño de la pantalla: oscila entre las 2 pulgadas en los teléfonos móviles
y las casi 10 pulgadas de algunas tabletas, esta característica in�uye en la
forma en que el usuario observará la información y la facilidad con la cual
podrá analizar el contenido presente en alguna aplicación.
12

Interacción: Es la característica que permite la comunicación entre el usuario
y el dispositivo. El teclado que emplean los dispositivos puede ser alfanuméri-
co, Qwerty, de pantalla táctil o teclado virtual. Las pantallas táctiles permiten
interacción directa con el sistema de navegación.
Conectividad: Relacionada principalmente con la conectividad WiFi, presente en
la mayoría de dispositivos móviles en la actualidad. No debe existir falla en la
conectividad para que el sistema de navegación funcione adecuadamente.
2.3.2. Sistemas operativos para dispositivos móviles
Es el software básico de un dispositivo que provee una interfaz entre las aplicaciones
instaladas, hardware y el usuario. Su función principal es administrar los recursos del
dispositivo, coordinando el Hardware y organizando la información. Así el sistema
operativo determina el funcionamiento del dispositivo y la e�ciencia que presenta al
ejecutar alguna aplicación. A continuación se describen los sistemas operativos para
dispositivos móviles de mayor relevancia.
Symbian OS. Producido por la alianza de varias empresas de telefonía móvil, dentro
de las que destaca Nokia, Sony Ericsson, Samsung. En 2001 surge la primera versión
para dispositivos móviles. En [34] se indica su principal virtud como la capacidad que
tiene el sistema para adaptar e integrar todo tipo de aplicaciones. Ofrece las rutinas,
los protocolos de comunicación, el control de archivos y los servicios para el correcto
funcionamiento de estas aplicaciones.
Windows phone. Surge en 2010 como sucesor de la versión Windows Mobile desa-
rrollada por Microsoft. En [34] se expone como un sistema operativo móvil compacto,
se basa en el núcleo del sistema operativo de Windows CE. Está diseñado para ser
similar a las versiones de escritorio de Windows.
Android. Surge en 2008, en [34] se indica que inicialmente se diseñó para dis-
positivos móviles, también es usado para tabletas, se basa en Linux. Su estructura
se compone de aplicaciones que se ejecutan en un framework JAVA de aplicaciones
13

orientadas a objetos sobre el núcleo de las bibliotecas de JAVA en una maquina virtual
Dalvik.
iOS para iPhone. Desarrollado por Apple originalmente para el iPhone en el año
2007. Se utiliza en el iPod Touch e iPad. Derivado de Mac OS X. En 2008 se liberó un
SDK descargable gratuito que permite hacer aplicaciones para iPhone, aunque primero
se requiere pagar una cuota del iPhone Developer Program.
Blackberry OS. Surge en 1999 con los primeros Handheld. Desarrollado por la
empresa canadiense RIM (Research In Motion) para sus dispositivos. En [34] se des-
cribe como un sistema que permite multitarea y tiene soporte para diferentes métodos
exclusivos de RIM (trackwheel, trackball, touchpad y pantallas táctiles).
2.3.3. Comparativa entre sistemas operativos móviles
La Tabla 2.1 muestra una comparativa del Kernel y la conectividad entre los diversos
sistemas operativos móviles listados anteriormente.
Tabla 2.1: Análisis de los sistemas operativos de los dispositivos móvilesSistema Operativo Kernel Conectividad
Android Linux con máquina virtual Dalvik 3G, WiFi, GSM, GPRS
Blackberry OS Propietario 3G, WiFi, GSM, CMDA
iOS de iPhone OS X 3G, WiFi, GSM
Windows Phone Windows CE 3G, WiFi, GSM, CMDA
Symbian Symbian OS 3G, WiFi, GSM
Es importante conocer el kernel del dispositivo debido a que es el núcleo del sistema
operativo y se encarga de gestionar los recursos del sistema. En la Tabla 2.1 se observa
que el kernel de Android se basa en Linux por lo que es un sistema operativo de código
abierto y permite a los desarrolladores generar aplicaciones que combinen servicios y
librerías que la arquitectura de android ofrece (ver Anexo A).
14

2.4. Realidad aumentada
En el año de 1994 Paul Milgram y Fumio Kishino en [36] de�nen la realidad de
Milgram-Virtuality Continuum (Figura 2.1) como un entorno que se observa desde
la parte real hasta la parte virtual de modo continuo, en la parte media del entorno
se encuentra la realidad mixta que es la mezcla entre ambos entornos. La realidad
aumentada es la parte más cercana a la realidad, con ciertos aspectos virtuales como
se observa en la Figura 2.1.
Figura 2.1: Realidad de Milgram-Virtuality Continuum
En 1997, Ronald Azuma establece el punto de partida para las investigaciones de
realidad aumentada al elaborar el primer estudio realizado sobre la realidad aumentada
expuesto en [37] donde describe las 3 principales características con que deben contar
los sistemas que hagan uso de ella: a) Combinación de elementos virtuales y reales,
b) interactividad en tiempo real y c) la superposición de información en 3D.
En el 2005, Oliver Bimber en su trabajo �Spatial augmented reality merging real and
virtual worlds� mencionado en [1] de�ne a los sistemas de realidad aumentada como
aquellos sistemas que mezclan información virtual de cualquier tipo, desde imágenes
2D, texto o �guras 3D con un escenario físico real.
2.4.1. Tareas de la realidad aumentada
De acuerdo con [2] existen cuatro tareas principales que se llevan a cabo al realizar la
realidad aumentada:
a) Captación del entorno: Encargada de capturar el entorno en el cual se super-
pondrá la información virtual. Requiere de un dispositivo que permita reconocer
la escena para después procesarla. En el caso de los dispositivos móviles es la
cámara la encargada de realizar ésta tarea.
15

b) Identi�cación del entorno: Esta tarea se encarga de identi�car qué aspecto del
entorno capturado es el que será aumentado con la información virtual. Este
proceso puede ser realizado mediante reconocimiento de marcadores, estimación
de la posición o por una identi�cación híbrida la cual es una mezcla de ambas.
c) Aumento de la realidad: Es la tarea encargada de superponer la información
virtual (texto, imagen, video o audio) en el entorno real capturado.
d) Visualización: Es el último proceso que se realiza de la realidad aumentada, con-
siste en mostrar el escenario aumentado al usuario por medio de un dispositivo
de visualización.
2.4.2. Tipos de realidad aumentada
Según lo planteado por [26] existen dos tipos principales de realidad aumentada que
pueden llevarse a cabo:
Reconocimiento por marcadores.
Identi�cación por posicionamiento.
a) Reconocimiento por marcadores : Un marcador es una imagen reconocida por el
software de realidad aumentada. Este reconocimiento se realiza por medio de su
geometría, color o ambas características. Un sistema adecuado de reconocimien-
to de marcadores cuenta con un sensor que recoge la imagen del mundo real,
un mecanismo de extracción de características el cual obtiene la información de
utilidad y elimina aquella irrelevante para el procesamiento, por último una etapa
de toma de decisiones para el reconocimiento del marcador y la interpretación
de la escena.
a.1) Reconocimiento de imágenes: Es el proceso que consiste en extraer de una
imagen o un segmento de video la información necesaria del entorno para
identi�car la región a la cual se realizará la superposición de elementos vir-
tuales. Éste proceso se realiza principalmente por medio de visión arti�cial,
en el caso de reconocimiento de escenarios de manera automática o por
medio de marcadores, los cuales ya están preestablecidos en el sistema. Se
16

divide en dos partes principales, la adquisición de la imagen por medio de
cualquier dispositivo especializado y el procesamiento digital de la imagen
capturada, para obtener una imagen con características mejor de�nidas
para su interpretación.
b) Identi�cación por posicionamiento: La identi�cación de entorno mediante este
proceso se realiza gracias a la estimación de la posición y orientación del usua-
rio. Existen sistemas de posicionamiento que brindan la información necesaria
al dispositivo para realizar este tipo de realidad aumentada. El Sistema de Po-
sicionamiento Global (GPS) es un servicio de los EE.UU. que proporciona a los
usuarios información sobre navegación, posicionamiento y cronometría.
17

Página intencionalmente en blanco
18

Capítulo 3
Arquitectura del framework
3.1. Arquitectura de referencia
La arquitectura propuesta por Bernd Brüegge en [24] se basa en el análisis de 16
sistemas de realidad aumentada, con lo que concluye que a pesar de que los sistemas
de realidad aumentada tengan enfoques diferentes comparten una estructura básica
y genera un modelo de referencia con la unión de 6 módulos de información donde
cada uno realiza una actividad especí�ca de la realidad aumentada. Los módulos son
los siguientes:
a) Aplicación: Se encarga de la lógica del sistema, proporciona la funcionalidad del
usuario �nal y es la encargada de la secuencia de arranque del sistema.
b) Tracking: Es uno de los módulos principales de la arquitectura. Por medio de
diversas técnicas como: Rastreo de video, rastreo magnético, GPS, seguimiento
inercial, seguimiento externo del entorno. Puede utilizar el modelo del mundo
para obtener información del entorno. Los resultados se extienden al manejador
del contexto o a la interfaz de salida.
c) Entrada del usuario: Realiza el procesamiento de entrada de la información donde
los datos de entrada se envían a un procesador para después ser transmitidos al
manejador del contexto o al módulo de aplicación.
d) Salida de usuario: Es la interfaz de usuario donde se presentan los resultados ya
sean grá�cos en 3D, texto, voz o sonido.
19

e) Manejador del contexto: Es un sistema abstracto que cuenta con un componente
de gestor de contexto, el cual recoge diferentes tipos de información de contexto
como: las preferencias del usuario, datos de sensores, el tiempo, el seguimiento
de la fecha, información de recursos, dominio del conocimiento o el conocimiento
de la situación actual del usuario.
f) Modelo del mundo: Proporciona información sobre el mundo alrededor del usua-
rio se compone de escenas, colecciones de objetos virtuales, seguidores de in-
formación y representaciones de objetos del mundo real. En la Figura 3.1 se
muestra el modelo de referencia de la arquitectura, se identi�can los módulos
que componen la arquitectura y las relaciones de dependencia que existen entre
ellos, éstas dependencias indican que módulos dependen de los datos y de la
funcionalidad de otro.
Figura 3.1: Arquitectura de referencia propuesta por Brüegge
Para determinar el nivel de abstracción que tiene la arquitectura de referencia propuesta
por Brüegge, se basó en los 4 diferentes signi�cados del término arquitectura de
software identi�cados por Hofmeister en [38], los cuales son los siguientes:
20

a) Arquitectura de software (aplicación): Describe la arquitectura de una aplicación
especí�ca.
b) Arquitectura de línea de productos: Describe una arquitectura para un conjunto
de productos la cual con modi�caciones mínimas puede adaptarse a aplicaciones
similares.
c) Arquitectura de dominio especí�co: Describe la arquitectura de sistemas o sub-
sistemas con un dominio especí�co, puede emplearse como punto de partida
para el desarrollo de aplicaciones del mismo dominio.
d) Arquitectura de estilo: Describe una solución general a nivel de diseño.
Brüegge de�ne a un framework como una arquitectura más una implementación par-
cial, al enfocar ésta de�nición a los términos de arquitectura de software identi�cados
por Hofmeister se tienen los siguientes tipos de frameworks:
a) Framework de dominio de aplicación: Provee componentes y estructuras reuti-
lizables para un conjunto de aplicaciones similares.
b) Framework de dominio de solución: Implementa parte de la arquitectura y pro-
porciona parte de la solución para sistemas con un dominio especí�co.
c) Framework de arquitectura de estilo: Soporta el empleo de estilos de diseño.
En cuanto a la arquitectura de software de aplicación no existe un framework debido a
que una arquitectura para una aplicación especí�ca no puede ser reutilizable. La arqui-
tectura de referencia propuesta por Brüegge se basa en el desarrollo de un framework
de dominio de solución, ya que el dominio especí�co de la arquitectura es la realidad
aumentada.
21

3.2. Arquitectura propuesta
Con base a la arquitectura de referencia y enfocada a los requerimientos del framework,
se generó la arquitectura de la Figura 3.2, la cual mantiene los módulos utilizables.
Figura 3.2: Arquitectura del framework
A continuación se describe cada uno de los módulos que componen la arquitectura
del framework propuesto en el presente trabajo de investigación.
Aplicación La Figura 3.3 muestra la relación del módulo con el framework. Consiste
en el código especí�co de la aplicación, es la forma en que interactúa la aplicación con
el framework. Se encuentra relacionado con el módulo de almacenamiento de datos
debido a que necesita del manejador para poder accesar a la información de los datos
guardados y con el módulo de captura y edición de video para obtener el video y
visualizar la información en pantalla.
22

Figura 3.3: Módulo de aplicación
Procesamiento Puede utilizar el módulo de almacenamiento de datos para obtener
información del entorno por medio del manejador. Los resultados van dirigidos al
módulo de captura y edición de video para visualizar la información resultante de
procesamiento. Está dividido en dos elementos: GPS, obtiene la información de la
geolocalización del dispositivo y de los marcadores cuando se almacenan y SURF el
cual es el encargado de realizar el procesamiento de imágenes ya sea de los marcadores
almacenados o de la captura de video. Su composición y relaciones se muestran en la
Figura 3.4.
Figura 3.4: Módulo de procesamiento
Almacenamiento de datos Este módulo es el encargado de almacenar la infor-
mación del entorno que se obtiene del módulo de procesamiento a través de la clase
Procesamiento, así como permitir el acceso a la información del módulo de captura
y edición de video para mostrarse en la vista de la aplicación por medio de la clase
Salida. Las relaciones entre el módulo y el framework se muestra en la Figura 3.5.
23

Figura 3.5: Módulo de almacenamiento de datos
Captura y edición de video Es el módulo que se encarga de obtener la información
de video para ser procesado por el módulo de procesamiento a través de la clase
Procesamiento y mostrar la información que se obtiene aumentando la información
del módulo de almacenamiento de datos por medio de la clase Manejador, la cual se
visualiza en la pantalla de la aplicación a través de la clase Aplicación. La interacción
del módulo con el framework se muestra en la Figura 3.6.
Figura 3.6: Módulo de captura y edición de video
En el Anexo A se muestra el diagrama de clases de la arquitectura que se generó
al realizar ingeniería inversa al framework desarrollado por medio de la herramienta
Enterprise Architect 6.5 en la versión de evaluación.
24

Capítulo 4
Módulo de procesamiento
El módulo de procesamiento se basa en la combinación de dos técnicas para obtener
las características necesarias para la detección de marcadores: el reconocimiento de
imágenes y la geolocalización.
En el presente capítulo se explica el proceso de implementeción del algoritmo de
procesamiento de imágenes utilizado en el framework y como se obtiene la localización
del dispositivo móvil, así como los resultados obtenidos de las pruebas realizadas para
comprobar el funcionamiento del módulo.
4.1. Algoritmo de procesamiento de imágenes
En el artículo �De�nición y descripción de un pixel� mostrado en [39] se explica que
las imágenes digitales se forman por la unión de pixeles, los cuales son la unidad
mínima en color de las imágenes. El color especí�co de un pixel es la combinación de
tres componentes del espectro de color: rojo, verde y azul, por tal motivo cualquier
algoritmo de procesamiento de imágenes debe trabajar sobre las características de los
pixeles.
En [40], Boullosa de�ne a los descriptores visuales como aquellos que describen las
características visuales de los contenidos de imágenes o videos. Se dividen en dos tipos
principales: a) Descriptores de información general, los cuales proporcionan informa-
ción relacionada con formas, colores o regiones de una imagen y b) los descriptores
25

de información de dominio especí�co los cuales proporcionan información de objetos
que forman una escena.
Los descriptores de información general se dividen de acuerdo al procesamiento que
realizan: a) Descriptores globales, generan un único vector de características de la
imagen y b) los descriptores locales, actúan sobre regiones de interés en especí�co
para generar un vector de características por cada región procesada.
4.1.1. Determinación del algoritmo de procesamiento de
imágenes
Se realizó un análisis de los trabajos de investigación relacionados con el desarrollo e
implementación de algoritmos para el reconocimiento de imágenes para la elección del
algoritmo a implementar.
En [41], Romero y Cazorla muestran una comparativa de detectores de características
visuales y su aplicación al SLAM (Simultaneous Localization and Mapping) el cual
trata de resolver la problemática de estimar la posición de un robot y el mapa de su
entorno. La solución a lo anterior se realiza mediante la implementación de algoritmos
de extracción de caracteres, de los cuales en el presente trabajo de investigación se
realiza una comparativa del funcionamiento de dos de ellos: SIFT (Scale Invariant
Features Transforms) y SURF (Speeded Up Robust Features), también se desarrolla
un algoritmo para el emparejamiento de las imágenes.
La muestra empleada fue de 109 imágenes de un edi�cio, la Tabla 4.1 muestra el resul-
tado de la implementación de los algoritmos en un extracto de las 10 imágenes iniciales.
Las medias obtenidas de los puntos invariantes obtenidos son para SIFT=1292.01 y
SURF=482.69, mientras que la media del tiempo empleado es para SIFT=1646.53ms
y para SURF=485.77ms. De los datos anteriores se observa que el algoritmo SIFT
cuenta con mayor cantidad de puntos invariantes detectados y SURF cuenta con ma-
yor velocidad al realizar el procesamiento. Se concluye que el algoritmo SURF cuenta
con mayor velocidad de ejecución, sin embargo hace un reconocimiento de menos
puntos característicos, mientras que SIFT incrementa casi al doble la velocidad de
procesamiento empleada por SURF y aunque se detectan más puntos característi-
cos existe repetibilidad entre los puntos que se detectan por lo tanto el uso de cada
algoritmo depende de los objetivos de su implementación.
26

Tabla 4.1: Extracto de la comparativa de funcionamiento entre el algoritmo SIFT ySURF expuesto en [41]
Imagen Puntos SIFT Puntos SURF Tiempo SIFT (ms) Tiempo SURF (ms)
imagen1 958 397 1528 420
imagen2 1046 405 1540 430
imagen3 1251 451 1656 466
imagen4 1395 499 1712 543
imagen5 1408 468 1808 463
imagen6 1262 491 1632 453
imagen7 1292 431 1668 450
imagen8 1285 433 1596 405
imagen9 1528 529 1736 476
imagen10 1399 493 1708 476
Con base a los resultados de la investigación se concluyó que si se genera una aplica-
ción donde es primordial minimizar los tiempos de ejecución, se recomienda emplear
el algoritmo SURF, en cambio si se genera una aplicación donde lo primordial sea
la cantidad de puntos de interés detectados sin importar el tiempo que se requiera
entonces se recomienda emplear el algoritmo SIFT.
En [42], Ballesta, Gil, Reinoso y Úbeda realizan un análisis comparativo entre diver-
sos extractores de características (un detector de puntos signi�cativos y un descriptor
local) con la �nalidad de obtener el extractor que tenga mejor rendimiento. Los algo-
ritmos de detección de puntos que se evaluaron son: Harris Corner Detector, Harris
Laplace, SUSAN (Smallest Univalue Segment Assimilating Nucleus), SIFT y SURF.
Los descriptores locales que se evaluaron son: SIFT, SURF, ventana de niveles de
grises, histograma de orientación y momentos de Zernike. Los factores a evaluar en la
comparativa, fueron los siguientes: cambio de ángulo, cambio de iluminación, escena
de movimiento, variación de zoom, escena global. Con respecto a la detección de pun-
tos signi�cativos de acuerdo al análisis que se realizó, el algoritmo que presentó mejor
rendimiento fue el de Harris Corner Detector seguido por Harris Laplace, SIFT, SURF
y SUSAN tanto para imágenes en interiores como en exteriores. En la comparativa
de descriptores locales el resultado en orden descendente en base al rendimiento es el
siguiente: SURF, SIFT, Histogramas, Zernike y ventana de niveles.
En [40], Boullosa realizó una comparativa entre diversos descriptores visuales con
el objetivo de detectar escenas cuasi-duplicadas. El estudio divide a los descriptores
de características como globales (los cuales resumen la imagen en un solo vector de
27

características) y locales (actúan sobre regiones de interés), en ellos se comparó el
comportamiento de 6 diversos descriptores, los cuales son: histogramas HSV (Hue,
Saturation y Value), histogramas RGB (Red, Green y Blue), Color layout, Correlogra-
ma, SIFT y SURF.
La Tabla 4.2 muestra las ventajas e inconvenientes que cada descriptor presenta de
acuerdo a sus propios autores, lo cual sirve de base para analizar los casos de estudio
donde pueden emplearse. Histograma de color, Color layout y Correlograma cuentan
con bajo costo computacional, sin embargo al depender de la distribución de colores en
la imagen son susceptibles ante cambios de iluminación, mientras que los algoritmos
SURF y SIFT presentan invarianza ante cambios de rotación, escala e iluminación y
translación aunque tienen mayor costo computacional.
Tabla 4.2: Ventajas e inconvenientes de los descriptores analizados en [40]Descriptor Ventajas Inconvenientes
Robusto a cambios de escala No incluye información espacial.
Histograma o pequeños movimientos. Dos imágenes distintas pueden tener
de color Invariante a la rotación sobre los ejes. similares histogramas.
Bajo costo computacional. Susceptible a cambios de iluminación.
Color Layout
Rapidez y repetibilidad. Efecto bloque
Poca complejidad del proceso Solo analiza correlacion entre
de comparación. pixeles del mismo bloque.
CorrelogramaIncluye información espacial sobre Costo computacional elevado.
la distribución de los colores.
SIFT
Invarianza respecto a rotación, Costo computacional elevado.
translación, escala y Depende del tamaño de la imagen.
cambios de iluminación.
SURFMayor robustez y velocidad
Depende del tamaño de la imagen.de cálculo que SIFT.
La Tabla 4.3 muestra los resultados de una comparativa entre el costo computacional
de la implementación de los descriptores y los tiempos de ejecución, existe una amplia
diferencia entre los descriptores globales y locales en el aspecto del coste computacional
debido a que los segundos requieren mayor procesamiento debido al procesamiento que
requieren para mantener la invarianza ante cambios de rotación, translación, escala e
iluminación.
28

Tabla 4.3: Costo computacional de los descriptores analizados en [40]
DescriptorTiempo de Tiempo de Tamaño del
creación (ms) comparación (ms) descriptor
Histograma RGB 130 6 384-1536 bytes
Histograma HSV 290 5.4 96-384 bytes
Color Layout 60 2.5 768 bytes
Correlograma 9800 5.5 960 bytes
SIFT 7100 600 470 Kb
SURF 350 125 100 Kb
Como conclusión del estudio los descriptores que obtuvieron mejor rendimiento fueron
SIFT e histograma HSV, SURF, después Histograma RGB y Color layout y por último
Correlograma, cabe mencionar que el autor aclara que los resultados que se obtienen
de los descriptores depende en gran parte del contenido de la base de datos y que la
implementación de los descriptores depende de las necesidades del sistema y de las
capacidades del hardware en que se implemente.
Con base en el análisis de los algoritmos de procesamiento de imágenes anterior se
seleccionó la implementación del algoritmo SURF el cual se basa en la detección de
puntos de interés invariantes ante cambios de iluminación, rotación, escala y trans-
lación, para el procesamiento de imágenes que realizará el framework debido a su
robustez ante la invarianza de cambios de iluminación, rotación y escala, así como
presentar mejor velocidad de procesamiento y detección de puntos de interés en com-
paración a descriptores similares.
4.1.2. Implementación del algoritmo SURF
Lo desarrolló Herbert Bay [43] como un detector de puntos de interés y descriptor de
características robusto. Las características principales que brinda son: invariancia ante
la escala, orientación y distorsión afín así como invariancia parcial a los cambios de
iluminación. De acuerdo al artículo de Evans [44] el algoritmo se encuentra dividido
en 3 etapas principales y el emparejamiento de los puntos de interés localziados en
dos imágenes:
Imágenes integrales: es uno de los principales aportes que utiliza el algoritmo,
debido a que contribuyen a una mejora en el funcionamiento. Dada una imagen
29

de entrada y un pixel de esa imagen, la imagen integral se calcula como la suma
de los pixeles comprendidos entre el punto y el origen.
Detector basado en la matriz Hessiana: se basa en el determinante de la matriz
Hessiana para la localización y escala de los puntos, se emplea por su rendimiento
en la velocidad de cálculo y precisión.
Descriptor: es un vector de características que se calcula sobre una pequeña
región de interés de la imagen, en el caso del descriptor SURF, muestra como
la intensidad de los pixeles se distribuye dentro de una escala dependiente de la
vecindad de cada punto de interés que detectó la Hessiana.
Emparejamiento de puntos de interés: correspondencia de los puntos de interés
identi�cados en dos imágenes.
La Figura 4.1 muestra el diagrama de �ujo del algoritmo SURF, donde la conversión
de la imagen a escala de grises se realiza al momento de calcular la imagen integral, el
detector de puntos de interés se divide en: cálculo del determinante de la matriz hes-
siana, cálculo del espacio-escala, supresión de puntos debajo de un umbral, supresión
de no máximos en un vecindario de 3x3x3 y la interpolación en escala y posición. El
cálculo del descriptor de puntos de interés se divide en la asignación de la orientación
y cálculo de los componentes del descriptor.
30

Figura 4.1: Diagrama de �ujo algoritmo SURF
A continuación se describe el funcionamiento e implementación de las etapas del
algoritmo SURF.
Imágenes integrales: El uso de imágenes integrales lo introduce Paul Viola y Mi-
chael Jones en el artículo [45] de nombre �Rapid Object Detection using a Boos-
ted Cascade of Simple Features�, las cuales permiten una rápida evaluación de
características de una imagen. Son empleadas por que permiten disminuir la
cantidad de operaciones al realizar cálculos en el detector y descriptor SURF.
La imagen integral en el pixel x,y contiene la suma de los pixeles arriba y a la
izquierda del punto, expresado en la ecuación 4.1.
I∑ (x,y) =i<=x
∑i=0
j<=y
∑j=0
I(x,y) (4.1)
31

Donde I(x,y) es la imagen original y I∑(x,y) es la imagen integral. Para el cálculo de
la imagen integral se emplean las operaciones descritas en 4.2 y 4.3.
s(x,y) = s(x,y−1)+ I(x,y) (4.2)
I∑(x,y) = I∑(x−1,y)+ s(x,y) (4.3)
Donde s(x,y) es una suma acumulativa y las funciones cuentan con los valores iniciales
descritos en 4.4 y 4.5.
s(x,−1) = 0 (4.4)
I∑(−1,y) = 0 (4.5)
Implementación de la imagen integral: La imagen integral es un arreglo del
mismo tamaño de la imagen original, en el cual cada posición contiene el valor
de la sumatoria de todos los pixeles arriba y a la izquierda de la imagen original.
Para su implementación se realiza inicialmente un recorrido de la imagen a lo
ancho, inicializando la sumatoria de los elementos en cero, en seguida el recorrido
se realiza a lo alto de la imagen, dentro del cual para cada elemento se obtiene
el valor en escala de gris del pixel a evaluar y se añade a la sumatoria �nal, si el
valor de la columna es mayor a 0 entonces el elemento de la imagen integral es
igual al valor del pixel de la columna anterior más la sumatoria, en otro caso el
elemento de la imagen integral es igual a la sumatoria.
Al implementar la imagen integral se disminuye la cantidad de cálculos que se realizan
en los pasos siguientes del algoritmo, por ejemplo para realizar la sumatoria de un área
rectangular dentro de la imagen, considerando los puntos seleccionados en la Figura
4.2, en vez de sumar cada uno de los elementos, únicamente se tendrán que realizar
las operaciones que se muestran en la ecuación 4.6 lo cual disminuye la cantidad de
cálculos.
∑ = A+D− (B+C) (4.6)
32

Figura 4.2: Cálculo de la imagen integral
Detector basado en la matriz Hessiana: Dado un punto p=(x,y) de la imagen
I, la matriz Hessiana H(p,σ) del punto p que pertenece a la escala σv se de�ne
por 4.7.
H(p,σ) =
[Lxx(p,σ) Lxy(p,σ)
Lxy(p,σ) Lyy(p,σ)
](4.7)
Donde Lxx(p,σ) es la convolución de la derivada parcial de segundo orden de la
Gaussiana en el punto p y escala σ .
Las gaussianas se emplean en el análisis del espacio-escala debido a su desempeño en
la localización de puntos de interés, en el desarrollo del algoritmo SURF se propone
la implementación de �ltros de caja para brindar una aproximación de las derivadas
parciales de segundo orden de las gaussianas para ser evaluadas rápidamente con el
uso de las imágenes integrales.
En la Figura 4.3 se muestra la aproximación propuesta en el algoritmo SURF para las
derivadas parciales de segundo orden de las gaussianas por medio de �ltros de caja,
donde el área en gris representa el valor de 0. Debido a que las áreas se encuentran
de�nidas con valores ya de�nidos en los �ltros de caja, existe un incremento en la
velocidad de cálculo en conjunción al empleo de las imágenes integrales.
33

Figura 4.3: Aproximación de las derivadas parciales de segundo orden de las gaus-sianas empleando �ltros de caja. Izquierda: derivadas parciales de segundo orden de las
gaussianas. Derecha: aproximación por �ltros de caja.
Para el cálculo del determinante de la Hessiana, Bay en [43] propone la ecuación 4.8,
donde se emplea el �ltro de 9 x 9 como �ltro inicial con σ = 1.2 que representa la
mínima escala del mismo. Con relación a la Figura 4.2, se denota Dxx, Dyy y Dxy
como las aproximaciones a utilizar.
det(Haprox) = DxxDyy−w2D2xy (4.8)
donde w=0.9, cuyo valor se utiliza para balancear la expresión del determinante de
la Hessiana, para permitir que la respuesta del �ltro esté normalizada con respecto
al tamaño de la máscara para garantizar una norma de Frobenius constante para
cualquier tamaño de �ltro.
Para el cálculo del determinante de la Hessiana se emplea el proceso propuesto en [46]
por Han, Jia y Wang donde se optimiza el algoritmo SURF, en la Figura 4.4 se asigna
un nombre a cada región en color negro y blanco.
34

Figura 4.4: Aproximación de las derivadas parciales de segundo orden de las gaussianasmediante imágenes integrales
Para el cálculo de Dxx, Dyy de la ecuación 4.8, de acuerdo a la Figura 4.4 y tomando
en cuenta los valores que se asignaron a las aproximaciones en la Figura 4.3, las
operaciones a realizar están descritas en 4.9.
Dxx(oDyy) = Sum1−2xSum2 +Sum3 (4.9)
Y para Dxy descrita en 4.10.
Dxy = Sum1−Sum2−Sum3 +Sum4 (4.10)
Figura 4.5: Asignación de puntos en las sumatorias en Dxx y Dyy
En la Figura 4.5 se observan los puntos que representan los limites de cada sumatoria
y se les asigna un valor en especí�co, se utilizó la Figura 4.2 y la ecuación 4.6 del
cálculo de las imágenes integrales, se obtiene que para el cálculo de las sumatorias se
realizan las siguientes operaciones, desglozando los elementos de la ecuación 4.9 en
4.11, 4.12 y 4.13.
35

Sum1 = A+D− (B+C) (4.11)
Sum2 =C+F− (D+E) (4.12)
Sum3 = E +H− (F +G) (4.13)
Reagrupando 4.11, 4.12 y 4.13 y sustituyéndolas en 4.9 se obtiene la ecuación 4.14.
Dxx(oDyy) =(A−B)+(D−C)+(D−C)+(D−C)+
(E−F)+(E−F)+(E−F)+(H−G)(4.14)
Se de�nen las siguientes variables descritas en 4.15 y 4.16.
X1 = D−C (4.15)
X2 = E−F (4.16)
Se sustituyen 4.15 y 4.16 en 4.14 lo que genera la ecuación descrita en 4.17 que es la
ecuación a implementar en el algoritmo para el cálculo de Dxx o Dyy.
Dxx(oDyy) = (A−B)+X1 +X1 +X1 +X2 +X2 +X2 +(H−G) (4.17)
Para detectar los puntos de interés por medio del determinante de la matriz Hessiana,
se requiere emplear el espacio-escala, el cual comúnmente se representa en forma
piramidal como se observa en la Figura 4.6 donde en el lado izquierdo una imagen
se convoluciona iteradamente con las gaussianas con lo cual se disminuye el tamaño
de la imagen en cada iteración, en el lado derecho se presenta el caso de SURF
donde el tamaño de la imagen se mantiene constante siendo el �ltro el que se escala
repetidamente.
36

Figura 4.6: Pirámide del �ltro
En SURF el espacio-escala se divide en octavas e intervalos, donde una octava re-
presenta una serie de imágenes de respuesta y un intervalo representa la cantidad de
imágenes de respuesta en cada octava. El tamaño del �ltro se calcula mediante la
ecuación 4.18.
Tam f iltro = 3(2oct x int +1) (4.18)
donde, oct=número de octavas e int=número de intervalos para cada octava, con
lo cual se implementa un arreglo bidimensional de estructuras de imagen de tamaño
(octava)*(intervalo). Por ejemplo, para analizar el espacio-escala entre 3 octavas y 4
intervalos, se crea un arreglo de 12 estructuras de imágenes (ver Figura 4.7) el eje
vertical representa las octavas y el eje horizontal la escala a la que se obtiene, el valor
dentro de cada recuadro es el tamaño del �ltro a emplear.
Figura 4.7: Representación grá�ca de la longitud de los �ltros de diferentes octavas
Por último para localizar los puntos de interés en la imagen se eliminan los puntos
que no cumplan con la condición de ser los máximos en un vecindario de 3x3x3. El
máximo determinante de la matriz Hessiana se interpola en escalas e imágenes con el
método propuesto por Brown en [47].
37

Para determinar la invarianza ante la escala y la rotación como paso inicial se eliminan
los puntos que se encuentran por debajo de un umbral establecido, si el punto es mayor
al umbral se hace una supresión de no máximos dentro de un vecindario de 3x3x3,
esto es que dentro de cada octava se compara cada punto calculado en un intervalo
con el punto en un intervalo mayor y uno menor, si el punto es mayor que los puntos
comparados entonces se realiza una interpolación entre las diferentes escalas a través
de la ecuación 4.19 propuesta por Brown en [47].
x =δ 2H−1
δx2δHδx
(4.19)
donde δ 2H−1
δx2 es la matriz de 3x3 descrita en 4.20 y δHδx por un vector de 3x1 descrito
en 4.21.
δ 2H−1
δx2 =
dxx dyx dsx
dxy dyy dsy
dxs dys dss
(4.20)
δHδx
=
dx
dy
ds
(4.21)
donde x e y representan el espacio y s representa la escala a la que fue encontrado el
punto, ésto para encontrar los puntos de interés sobresalientes.
Implementación del detector: Para la detección de los puntos de interés se re-
quiere el cálculo del determinante de la matriz Hessiana, como se mostró en la
explicacón anterior, para ésto se cálcula inicialmente el tamaño del �ltro que
se empleará la ecuación 4.18, a continuación se realiza el cálculo del determi-
nante mediante una multiplicación de �ltros de caja, para acelerar el proceso se
emplea la imagen integral y aplicando las ecuaciones 4.10 y 4.17, para obtener
las componentes en Dxx, Dyy y Dxy y calcular el determinante con la ecuación
4.8. Se realiza la inversa de la matriz 4.20 y se multiplica por el vector 4.21, si
todos los valores del vector resultante son menores a 0.5 entonces el punto es
considerado un punto de interés, ésto con la �nalidad de mantener los puntos
más estables y repetitivos.
38

Descriptor de puntos de interés: La obtención del descriptor se divide en dos
tareas especí�cas, a) primero se realiza la asignación de la orientación de cada
punto de interés y b) se obtienen las componentes del descriptor. A continuación
se describen ambas tareas.
Asignación de la orientación: Ésta tarea permite la invarianza ante la rota-
ción de las imágenes mediante la orientación de cada punto de interés.
Para cada punto de interés obtenido en la etapa anterior se realiza el cálculo de la
respuesta de Haar en las direcciones x e y, expresadas por los �ltros de caja que se
muestran en la Figura 4.8, lo cual se utiliza para detectar inclinaciones en ambas
direcciones.
Figura 4.8: Filtros de Haar empleados en el descriptor SURF (Color negro identi�cael valor de -1 y el blanco el valor de +1)
Lo que se analiza es el área circular comprendida en un radio de 6 veces la escala
a la que el punto de interés se localizó para obtener la orientación del punto de
interés. Así mismo, el valor que tomarán las respuestas de Haar será de 4 veces la
misma escala y se aplican las imágenes integrales para disminuir el procesamiento.
Después de obtener las respuestas Haar, se ponderan con una gaussiana de valor 2.5
veces la escala con centro en el punto de interés, lo cual se emplea para representar
al punto cálculado como un punto en el espacio x e y. Por último para obtener la
orientación dominante que presenta el punto de interés se realiza la sumatoria de
todas las respuestas obtenidas dentro de un ángulo de π/3, el cual se rotará con
incrementos constantes. La orientación �nal será aquella cuyo vector resultante sea
de mayor valor, como se observa en la Figura 4.9.
39

Figura 4.9: Asignación de la orientación
Componentes del descriptor: En esta etapa se trabaja nuevamente sobre
cada punto de interés particularmente. El primer paso es trazar un área cuadrada
de tamaño 20 veces la escala alrededor del punto de interés para mantener la
información espacial del punto, ésta región se divide en 4x4 subregiones del
mismo tamaño, en las cuales se calculan las respuesta de Haar para 25 puntos
de muestra distribuidos regularmente (ver Figura 4.10). Estas respuestas son
ponderadas con una gaussiana de 3.3 veces la escala para una mayor robustez
ante deformaciones geométricas y errores de localización.
El resultado de éste proceso es un vector de características dado por la ecuación 4.22.
V =[∑dx,∑dy,∑ |dx|,∑ |dy|
](4.22)
donde dx y dy representan la respuesta deHaar para x e y. El vector resultante es de
un largo de 4x4x4= 64 valores para cada punto de interés detectado lo cual genera la
invarianza ante la rotación, escala e iluminación.
40

Figura 4.10: Componentes del descriptor
Implementación del descriptor: En la implementación del descriptor únicamente
se trabaja sobre los puntos detectados anteriormente. Para la asignación de la
orientación primero se obtienen las respuestas de Haar para x e y, esto se realiza
tomando en cuenta un área circular de 6 veces la escala (s) del punto de interés,
el tamaño del �ltro para representar la respuesta Haar es de 4*s, en este paso se
utiliza la imagen integral para obtener las sumatorias de las regiones que serán
analizadas con la respuesta de Haar, los valores se multiplican por una gaussiana
de valor 2.5*s y a continuación se calcula el ángulo que tendrá dicha respuesta
empleando 4.23.
θ =
arctan( y
x
)x,y >= 0
π + arctan( y
x
)x,y <= 0
π− arctan(−y
x
)x < 0,y >= 0
2∗π− arctan(−y
x
)x >= 0,y < 0
(4.23)
Una vez obtenidos los ángulos se hace un recorrido de 0 a 3600 de la imagen con
incrementos constantes del ángulo en los cuales se hace una sumatoria de todas las
respuestas dentro de un intervalo de π
3 conservando la sumatoria mayor como el ángulo
del punto de interés.
Para la obtención del descriptor de características se genera un área rectangular de
20 veces la escala con centro en el punto de interés y con orientación determinada
por el ángulo localizado en la etapa anterior, a continuación se segmenta el área en
41

regiones de 4x4 del mismo tamaño, de las cuales se emplean 25 puntos distribuidos
regularmente dentro de cada subregión para calcular las respuestas de Haar en x e y
las cuales se calculan con el empleo de imágenes integrales.
Emparejamiento de puntos de interés: Para el emparejamiento de dos imágenes
I1 e I2, se obtienen para cada punto de la imagen I1 los dos mejores candidatos
de los puntos de interés de la imagen I2 mediante el criterio de máxima similitud,
el cual indica que los mejores candidatos para emparejar el punto de interés p1
de la imagen I1 con vector de características v1 son los puntos de interés p'1
y p'2 de imagen I2 cuyos vectores de características v'1 y v'2 representan las
distancias euclidianas menores d1 y d2 con respecto a v1. Si el cociente de
d1/d2 es menor a un umbral establecido, entonces los puntos de interés p1 y
p'1 son emparejados. La implementación del emparejamienot de los puntos de
interés se realiza como lo muestra el diagrama de �ujo de la Figura 4.11.
42

Figura 4.11: Diagrama de �ujo emparejamiento de puntos de interés
43
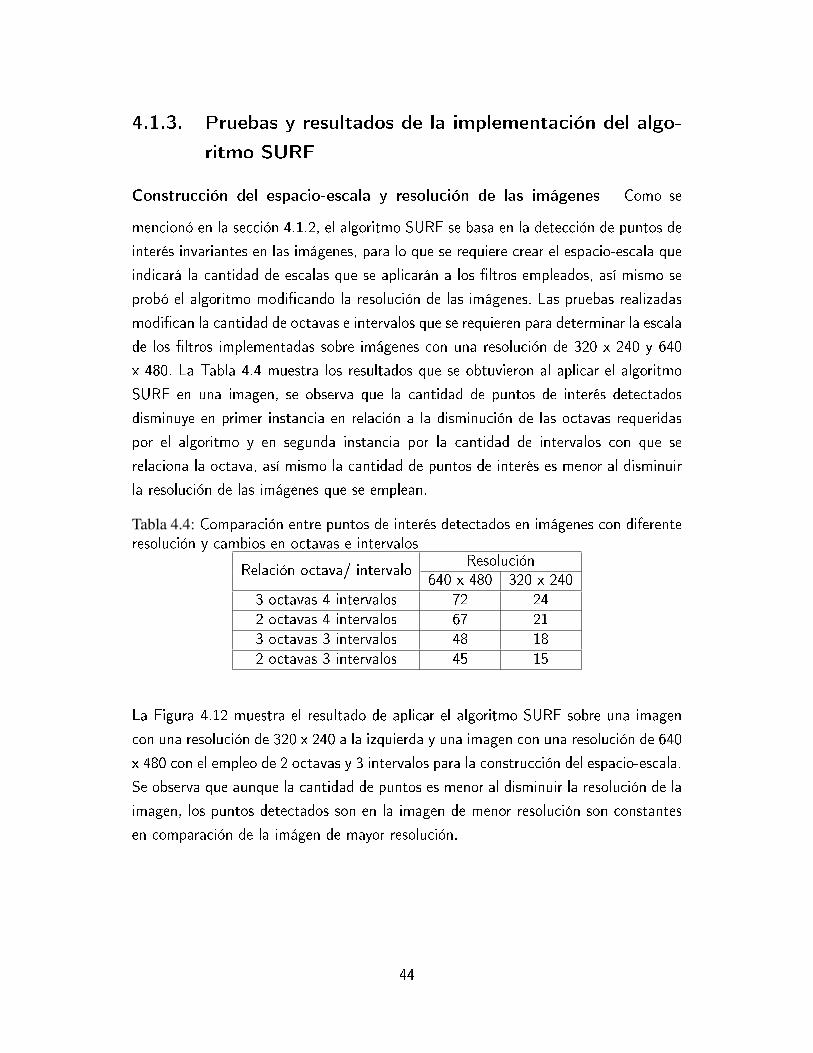
4.1.3. Pruebas y resultados de la implementación del algo-
ritmo SURF
Construcción del espacio-escala y resolución de las imágenes Como se
mencionó en la sección 4.1.2, el algoritmo SURF se basa en la detección de puntos de
interés invariantes en las imágenes, para lo que se requiere crear el espacio-escala que
indicará la cantidad de escalas que se aplicarán a los �ltros empleados, así mismo se
probó el algoritmo modi�cando la resolución de las imágenes. Las pruebas realizadas
modi�can la cantidad de octavas e intervalos que se requieren para determinar la escala
de los �ltros implementadas sobre imágenes con una resolución de 320 x 240 y 640
x 480. La Tabla 4.4 muestra los resultados que se obtuvieron al aplicar el algoritmo
SURF en una imagen, se observa que la cantidad de puntos de interés detectados
disminuye en primer instancia en relación a la disminución de las octavas requeridas
por el algoritmo y en segunda instancia por la cantidad de intervalos con que se
relaciona la octava, así mismo la cantidad de puntos de interés es menor al disminuir
la resolución de las imágenes que se emplean.
Tabla 4.4: Comparación entre puntos de interés detectados en imágenes con diferenteresolución y cambios en octavas e intervalos
Relación octava/ intervaloResolución
640 x 480 320 x 2403 octavas 4 intervalos 72 242 octavas 4 intervalos 67 213 octavas 3 intervalos 48 182 octavas 3 intervalos 45 15
La Figura 4.12 muestra el resultado de aplicar el algoritmo SURF sobre una imagen
con una resolución de 320 x 240 a la izquierda y una imagen con una resolución de 640
x 480 con el empleo de 2 octavas y 3 intervalos para la construcción del espacio-escala.
Se observa que aunque la cantidad de puntos es menor al disminuir la resolución de la
imagen, los puntos detectados son en la imagen de menor resolución son constantes
en comparación de la imágen de mayor resolución.
44

Figura 4.12: Comparativa entre dos imágenes con 2 octavas y 3 intervalos con reso-lución de 320x240 (imagen izquierda) y 640x480 (imagen derecha)
La siguiente prueba que se realizó compara los tiempos de ejecución que requiere el
algoritmo en diferentes dispositivos con imágenes de diferentes resoluciones y con di-
ferentes combinaciones de octavas e intervalos. La tabla 4.5 muestra los resultados
que se obtuvieron de la prueba, se muestra que el dispositivo que tuvo mayores tiem-
pos de ejecución es el celular Sony xperia U y el que menores tiempos de ejecución
presentó es la tableta Asus Transformer Pad In�nity, así mismo la combinación que
tuvo el menor tiempo de ejecución es con la tableta Asus Transformer Pad In�nity con
imágenes con resolución de 320 x 240 y 2 octavas con 3 intervalos para la construcción
del espacio-escala.
Tabla 4.5: Comparativa de tiempos de ejecución del algoritmo entre diversos disposi-tivos (resultados medidos en segundos)
Octava- Samsung Galaxy Asus Transformer Sony
intervalo Tab 2 Pad In�nity Xperia U
640 x 480 320 x 240 640 x 480 320 x 240 640 x 480 320 x 240
3 octavas22.84 8.10 17.34 5.48 28.30 9.24
4 intervalos
2 octavas17.85 5.41 13.64 4.46 23.17 6.73
4 intervalos
3 octavas19.56 5.30 15.24 4.78 25.60 7.07
3 intervalos
2 octavas15.30 4.56 12.35 4.12 19.52 6.16
3 intervalos
Con base a los resultados de las pruebas anteriores se propuso utilizar imágenes de
resolución de 320 x 240 y 2 octavas con 3 intervalos para la construcción del espacio-
escala, esto con la �nalidad de disminuir los tiempos de ejecución del algoritmo en
45

el dispositivo móvil, así mismo se propone emplear dispositivos con procesador a 1.9
GHz para contar con una mayor velocidad en la ejecución de las aplicaciones que se
creen con el empleo del framework.
Umbrales El algoritmo SURF implementa 3 umbrales que in�uyen en la cantidad
de puntos de interés detectados, en el emparejamiento de éstos puntos las imágenes y
el porcentaje de aceptación entre las imágenes emparejadas, por lo cual es necesario
ajustar estos umbrales para que se obtengan los mejores resultados en la detección
de los marcadores no convencionales. Las pruebas que se realizaron para obtener los
umbrales adecuados son las siguientes:
Curvas de la falsa aceptación y el falso rechazo: Sorita en su tesis doctoral
�Reconocimiento automático mediante patrones biométricos de huella dactilar�
expuesto en [48] establece que al existir variaciones en las características de
una muestra, las respuestas en los sistemas de reconocimiento automáticos se
basan en un estudio estadístico previo enfocado a la toma de decisión entre si
un elemento muestra es legítimo o impostor tomando en cuenta una tasa de
error. Al enfocar el concepto expuesto por Sorita para determinar los umbrales
empleados por el algoritmo, se presentan 4 escenarios posibles:
a) Si la imagen a analizar es la imagen marcador y es reconocida por el algoritmo,
entonces es una correcta aceptación (VP).
b) Si la imagen a analizar es la imagen marcador pero no es reconocida por el
algoritmo, entonces es un falso rechazo (FP).
c) Si la imagen a analizar no es la imagen marcador pero es reconocida por el
algoritmo, entonces es una falsa aceptación (FN).
d) Si la imagen a analizar no es la imagen marcador y no es reconocida por el
algoritmo, entonces es un correcto rechazo (VN).
Las curvas de la falsa aceptación y el falso rechazo gra�can la probabilidad de que
exista una falsa aceptación y un falso rechazo, el valor del umbral indica la probabilidad
de incrementar o disminuir una correcta aceptación y un correcto rechazo.
46

Para determinar el umbral para la detección de los puntos de interés se realizó una
comparación entre una imagen muestra comparada con 100 imágenes similares a la
imagen muestra y 100 imágenes diferentes a la imagen muestra, se empleó un umbral
de emparejamiento con valor de 0.5 y un umbral de aceptación de 10, los resultados
se observan en la Figura 4.13.
Figura 4.13: Curva de la falsa aceptación y el falso rechazo para determinar el umbralpara la detección de puntos de interés
En la Figura 4.13 se observa que la probabilidad de que exista una falsa aceptación
al emplear los diferentes umbrales para la detección de los puntos de interés es de 0,
mientras que el umbral que disminuye la probabilidad de que exista un falso rechazo
es el de 90, por lo tanto es el umbral a emplear en las siguientes pruebas.
Para determinar el umbral para el emparejamiento de las imágenes se realizó una
comparación entre una imagen muestra comparada con 100 imágenes similares a la
imagen muestra y 100 imágenes diferentes a la imagen muestra, se empleó el umbral
para la detección de puntos de interés con un valor de 90 y el umbral para la aceptación
del emparejamiento se mantiene en 10, los resultados se muestran en la Figura 4.14.
47

Figura 4.14: Curva de la falsa aceptación y el falso rechazo para determinar el umbralde emparejamiento de imágenes
La Figura 4.14 muestra que la probabilidad de que exista un falso rechazo disminuye
al incrementar el umbral para el emparejamiento de las imágenes, mientras que la
probabilidad de que exista una falsa aceptación aumenta al incrementar el umbral.
Con base al resultado obtenido en la prueba que se realizó, se emplea el umbral de
emparejamiento de las imágenes con un valor de 0.7 ya que presenta los mejores
resultados.
A continuación para determinar el umbral de aceptación del emparejamiento de imá-
genes se realizó una comparación entre una imagen muestra comparada con 100 imá-
genes similares a la imagen muestra y 100 imágenes diferentes a la imagen muestra,
se empleó el umbral para la detección de los puntos de interés con un valor de 90 y el
umbral para el emparejamiento de las imágenes con un valor de 0.7, los resultados se
muestran en la Figura 4.15.
48

Figura 4.15: Curva de la falsa aceptación y el falso rechazo para determinar el umbralde aceptación del emparejamiento de imágenes
La Figura 4.15 indica que la probabilidad de que exista un falso rechazo aumenta
al incrementar el umbral de aceptación del emparejamiento de imágenes, mientras
que la probabilidad de que exista una falsa aceptación disminuye al incrementar el
umbral. Con base a los resultados obtenidos, se emplea el umbral de aceptación del
emparejamiento de imágenes con un valor de 10.
Para comprobar los resultados obtenidos por las curvas de la falsa aceptación y el falso
rechazo, se emplearon las curvas ROC (por las siglas en inglés de Receiver Operating
Characteristic) para comparar los resultados generados.
Curvas ROC: Como lo indica Burgueño en su trabajo �Las curvas ROC en la evalua-
ción de las pruebas diagnósticas� expuesto en [49] se emplean para determinar
la relación que existe entre la sensibilidad y la especi�cidad de acuerdo con
diferentes umbrales empleados.
La sensibilidad es la probabilidad de obtener un resultado positivo cuando la imagen
a analizar es similar a la imagen muestra y viene dada por la ecuación 4.24.
sensibilidad =V P
V P+FN(4.24)
donde VP es la cantidad de correctas aceptaciones y FN es la cantidad de falsas
aceptaciones.
49

La especi�cidad es la probabilidad de obtener un resultado negativo cuando la imagen
a analizar es diferente a la imagen muestra y viene dada por la ecuación 4.25.
especi f icidad =V N
V N +FP(4.25)
donde VN es la cantidad de correctos rechazos y FP es la cantidad de falsos rechazos.
En la grá�ca de las curvas ROC se establece la sensibilidad en el eje Y y 1-especi�cidad
en el eje X para representar la probabilidad de falsos rechazos, ambos ejes incluyen
valores de 0 a 1, el umbral que cuenta con mayor aceptación, es el que se encuentre
más cercano al punto (0,1) el cual indica la totalidad de correctas aceptaciones con
ningún falso rechazo.
Para determinar el umbral para la detección de los puntos de interés se realizó una
comparación entre una imagen muestra comparada con 100 imágenes similares a la
imagen muestra y 100 imágenes diferentes a la imagen muestra, se empleó un umbral
de emparejamiento con valor de 0.5 y un umbral de aceptación de 10, se generó la
Tabla 4.6 con los valores de sensibilidad y 1-especi�cidad.
Tabla 4.6: Sensibilidad y 1-especi�cidad para generar curva ROC para determinar elumbral para la detección de los puntos de interés
Umbral VP FN VN FP 1-especi�cidad (eje x) sensibilidad (eje y)
0 8 92 100 0 0 0.08
10 32 68 100 0 0 0.32
20 38 62 100 0 0 0.38
30 36 64 100 0 0 0.36
40 42 58 100 0 0 0.42
50 43 57 100 0 0 0.43
60 42 58 100 0 0 0.42
70 40 60 100 0 0 0.40
80 49 51 100 0 0 0.49
90 58 42 100 0 0 0.58
100 52 48 100 0 0 0.52
Tomando la de�nición de la grá�ca de las curvas ROC, el punto con mejor valoración
es el más cercano a la coordenada (0,1) de acuerdo con la Tabla 4.6 el umbral mas
cercano al punto (0,1) es el 90 por lo que se emplea en las siguientes pruebas.
50

Para determinar el umbral para el emparejamiento de imágenes se realizó una compa-
ración entre una imagen muestra comparada con 100 imágenes similares a la imagen
muestra y 100 imágenes diferentes a la imagen muestra, se empleó un umbral para la
detección de puntos de interés con valor de 90 y un umbral de aceptación de 10, se
generó la Tabla 4.7 con los valores de sensibilidad y 1-especi�cidad.
Tabla 4.7: Sensibilidad y 1-especi�cidad para generar curva ROC para determinar elumbral para el emparejamiento de imágenes
Umbral VP FN VN FP 1-especi�cidad (eje x) sensibilidad (eje y)
0 0 100 100 0 0 0
0.1 0 100 100 0 0 0
0.2 0 100 100 0 0 0
0.3 3 97 100 0 0 0.03
0.4 24 76 100 0 0 0.24
0.5 58 42 100 0 0 0.58
0.6 89 11 100 0 0 0.89
0.7 100 0 100 0 0 1
0.8 100 0 87 13 0.13 1
0.9 100 0 4 96 0.96 1
1 100 0 0 100 1 1
En la Tabla 4.7 se observa que el umbral más cercano al punto (0,1) para el cálculo
de la curva ROC es el 0.7 por lo que es el umbral a emplear en las siguientes pruebas.
Para determinar el umbral para la aceptación del emparejamiento de imágenes se
realizó una comparación entre una imagen muestra comparada con 100 imágenes
similares a la imagen muestra y 100 imágenes diferentes a la imagen muestra, se
empleó un umbral para la detección de puntos de interés con valor de 90 y un umbral
de emparejamiento de imágenes de 0.7, se generó la Tabla 4.8 con los valores de
sensibilidad y 1-especi�cidad.
51

Tabla 4.8: Sensibilidad y 1-especi�cidad para generar curva ROC para determinar elumbral de aceptación para el emparejamiento de imágenes
Umbral VP FN VN FP 1-especi�cidad sensibilidad
0 100 0 0 100 1 1
10 100 0 100 0 0 1
20 70 30 100 0 0 0.70
30 20 80 100 0 0 0.20
40 5 95 100 0 0 0.05
50 1 99 100 0 0 0.01
60 0 100 100 0 0 0
70 0 100 100 0 0 0
80 0 100 100 0 0 0
90 0 100 100 0 0 0
100 0 100 100 0 0 0
En la Tabla 4.8 se observa que el umbral que tuvo mejor valoración en la curva ROC
es el de 10 por lo que es el empleado en la implementación del algoritmo.
Rotación, escala e iluminación Una de las características principales del al-
goritmo SURF es la invariancia ante cambios de escala, rotación e iluminación, sin
embargo para su implementación en dispositivos móviles es necesario conocer en que
condiciones prevalece la invarianza para el emparejamiento de imágenes, para obtener
los valores óptimos para el funcionamiento del framework. Por tal motivo se realiza-
ron pruebas para medir la invarianza ante cambios de escala, rotación e iluminación
implementando el algoritmo en un dispositivo móvil, se emplearon 30 imágenes como
marcadores y se emparejaron con imágenes de los mismos marcadores pero con las
variaciones mencionadas, el objetivo de la prueba era obtener en que condiciones existe
invarianza en el reconocimiento de imágenes por parte del algoritmo SURF y en que
porcentaje se presenta.
La Tabla 4.9 muestra los resultados que se obtuvieron de la comparación de los 30
marcadores con 11 imágenes con cambios en su rotación.
52

Tabla 4.9: Cambios de rotación para el emparejamiento de imágenesRotación Imágenes emparejadas % de aceptación
0° 30 100
45° 30 100
90° 25 83.3
135° 24 80
180° 27 90
225° 25 83.3
270° 24 80
315° 29 96.6
45° al frente 20 66.6
45° atras 19 63.3
45° a la izquierda 22 73.3
45° a la derecha 23 76.6
En la Tabla 4.9 se observa que el algoritmo tiene mejor emparejamiento de imáge-
nes cuando la imágen tiene cambios menores en cuanto al eje perpendicular o ésta
totalmente invertida la imagen, los mejores resultados son: 0°, 45°, 315° y 180° con
un porcentaje de emparejamiento mayor al 90%. Cuando la imagen es rotada hacia
enfrente, atrás, a la izquierda o a la derecha el emparejamiento de las imágenes dis-
minuye considerablemente aunque se encuentra entre el 60% y 80% de aceptación.
La Figura 4.16 muestra el emparejamiento de 1 marcador con la imagen rotada 180°.
Figura 4.16: Emparejamiento de imágenes con rotación
La Tabla 4.10 muestra los resultados que se obtuvieron al comparar 30 imágenes
empleadas como marcadores con las mismas imágenes con cambios en la escala de la
imagen, ésto alejando el dispositivo del objeto al capturar la imagen.
53

Tabla 4.10: Cambios de escala para el emparejamiento de imágenes% de tamaño en relación
Imágenes emparejadas % de aceptaciónal marcador
90 30 10080 30 10070 25 83.360 21 7050 12 4040 6 2030 0 020 0 010 0 0
En la Tabla 4.10 se observa que el emparejamiento de las imágenes se mantiene al
100% cuando el marcador disminuye su tamaño un 90% u 80% y cuando es meñor al
50% del tamaño del marcador original ya no existe emparejamiento entre las imágenes.
La Figura 4.17 muestra el emparejamiento entre 2 imágenes con cambios en la escala
del marcador.
Figura 4.17: Emparejamiento de imágenes con cambio de escala
La Tabla 4.11 muestra los resultados que se obtuvieron al comparar 30 imágenes
empleadas como marcadores con las mismas imágenes con cambios en la iluminación
de las imágenes, ésta prueba fue realizada en interiores con la luz que genera una
lámpara de luz blanca de bajo consumo con un �ujo luminoso de 1560 lúmenes y en
exteriores a diferentes horas del día.
54

Tabla 4.11: Cambios de iluminación para el emparejamiento de imágenesHora Empajejamiento % de Emparejamiento % de
del día Interiores aceptación Exteriores aceptación
7 30 100 30 100
8 30 100 30 100
9 30 100 30 100
10 30 100 30 100
11 30 100 30 100
12 30 100 29 96.6
13 30 100 28 93.3
14 30 100 29 96.6
15 30 100 28 93.3
16 30 100 30 100
17 30 100 30 100
18 30 100 30 100
19 30 100 29 96.6
20 30 100 0 0
21 30 100 0 0
En la Tabla 4.11 se observa que existe emparejamiento en todas las imágenes en
interiores, mientras que en exteriores disminuye el porcentaje de imágenes emparejadas
dependiendo la cantidad de luz ambiental, cuando oscurece y no existe luz arti�cial
que ilumine las imágenes no existe emparejamiento entre ellas. La Figura 4.18 muestra
el emparejamiento de dos imágenes con cambios en la iluminación.
Figura 4.18: Emparejamiento de imágenes con cambio de iluminación
55

4.2. Geolocalización
Daniel Abril en [2] de�ne a la geolocalización como la identi�cación del entorno me-
diante posicionamiento a través de la estimación de la posición del dispositivo. Existen
sistemas de posicionamiento que brindan la información necesaria al dispositivo para
realizar este tipo de realidad aumentada. Android provee dos tecnologías principales
para obtener la posición del dispositvo: Sistema de localización global basado en GPS
(Sistema de posicionamiento Global) y el Sistema de localización basado en la infor-
mación recibida de las torres de telefonía celular y de puntos de acceso WiFi. Debido
a que se propone que el sistema sea independiente al acceso de redes inalámbricas, se
emplea el sistema de localización global basado en GPS para el desarrollo del módulo.
Este sistema de localización fue diseñado inicialmente para uso militar aunque actual-
mente se emplea con �nes civiles. Consta de 3 componentes principales: a) Espacial,
b) control y c) receptor.
a) Espacial: Lo forman 24 satélites que orbitan la tierra a una distancia aproximada
de 20 200 km distribuidos en 6 planos orbitales. Ésta formación satelital se
generó con la �nalidad de que al menos 4 satélites sean visibles encima del
horizonte en cualquier punto de la super�cie terrestre.
b) Control : Está formado por 5 estaciones de rastreo y una estación de control
principal. Las estaciones se encargan de rastrear los satélites, actualizar sus
posiciones y calibrar sus relojes.
c) Receptor: Todos aquellos dispositivos que cuentan con un receptor GPS. Android
integra librerías especializadas para acceder a los recursos de su arquitectura.
En la Figura 4.19 se muestra un ejemplo del funcionamiento del GPS.
56

Figura 4.19: Funcionamiento del GPS
El submódulo de geolocalización es el encargado de obtener las coordenadas de latitud
y longitud del dispositivo al capturar las imágenes empleadas como marcadores no
convencionales en el módulo de almacenamiento de datos y al procesar el video para
acotar el rango de búsqueda para el emparejamiento de los puntos de interés.
En el caso de la localización del dispositivo se dispone de las siguientes clases que
permiten trabajar con la posición geográ�ca del dispositivo Android mediante GPS:
LocationManager: Proporciona acceso a los servicios de localización del sistema,
los cuales permiten recibir actualizaciones periódicas de la posición geográ�ca
del dispositivo.
LocationListener: Ésta clase se emplea para recibir noti�caciones por parte de
LocationManager cuando existe algun cambio en la posición del dispositivo.
Location: Representa la ubicación geográ�ca del dispositivo, la cual está inte-
grada por la información de latitud, longitud, altitud, fecha, hora y velocidad.
El proceso a seguir se muestra en el diagrama de �ujo de la Figura 4.20, donde se
comienza con el acceso al servicio de localización para almacenar la geolocalización
del dispositivo.
57

Figura 4.20: Diagrama de �ujo para obtener la información de geolocalización
El proceso para obtener la información de geolocalización que se muestra en la Figura
4.20 inicia al acceder al servicio de localización del dispositivo y obtener la última
localización conocida, a continuación se obtiene el status del GPS del dispositivo, si
está inhabilitado, se manda un mensaje de alerta, en caso contrario se comprueba que
la localización sea diferente de nulo, si es así seactualiza la localización y se obtiene la
última localización conocida, en caso contrario se solicita nuevamente la localización,
si la última localización es diferente de nulo, se guarda la localización del dispositivo.
58

4.2.1. Obtención de la lectura de geolocalización
Para comprobar obtención de la información de geolocalización se generó una aplica-
ción que obtiene las coordenadas de latitud y longitud del dispositivo, éstas coorde-
nadas se actualizan cada 30 segundos por lo que en pantalla se visualiza las nuevas
coordenadas después de transcurrido el tiempo establecido. La Figura 4.21 muestra el
resultado de ésta aplicación, en la parte superior de la �gura se muestran las coorde-
nadas de latitud y longitud al iniciar la aplicación, en la parte inferior de la �gura se
muestran las coordenadas actualizadas después de transcurrir 30 segundos.
Figura 4.21: Aplicación de prueba para obtener la geolocalización del dispositivo
Las pruebas de geolocalización realizadas permiten conocer las coordenadas de latitud
y longitud del dispositivo al tomar una fotografía para almacenarla como marcador o
al capturar el video de la cámara del dispositivo, ésta información se actualiza cada
30 segundos para tener una geolocalización actualizada del móvil.
59

Página intencionalmente en blanco
60

Capítulo 5
Módulo de almacenamiento de
datos
Para el almacenamiento de datos se utilizó la librería SQLite versión 3.4.0 la cual está
incorporada en la arquitectura de los dispositivos Android (ver Anexo B). Dentro de las
herramientas incluidas en la librería se encuentran aquellas que permite la creación y
gestión de las bases de datos. SQLite es un sistema gestor de base de datos relacional,
requiere memoria limitada en tiempo de ejecución. Una característica importante de
SQLite es que es una librería que se enlaza con la aplicación, esto signi�ca que todas
las operaciones de la base de datos se realizan dentro de la aplicación por medio de
llamadas y funciones contenidas en la librería. Los tipos de datos de�nidos en SQLite
y publicados en la página o�cial se muestran en la Tabla 5.1. SQLite soporta bases
de datos de terabytes de tamaño.
Tabla 5.1: Tipos de datos permitidos por SQLiteTipo de dato Descripción
NULL El valor es un valor NULL
INTEGEREl valor es un entero con signo, almacena en 1,2,3,4,6 u 8
bytes dependiendo de la magnitud del valor.
REALEl valor es un �otante almacenado como un
número de punto �otante de 8-byte IEEE
TEXTEl valor es una cadena de texto almacenado utilizando la
codi�cación de base de datos (UTF-8, UTF-16BE o UTF-16LE)
BLOB El valor es un arreglo de datos almacenado tal cual entra
Para crear el almacenamiento de datos con SQLite no se requiere un proceso de con�-
61

guración, simplemente se tienen que de�nir las instrucciones SQL para crear y actuali-
zar la información. Inicialmente para crear la base de datos y actualizar la información
se crea una clase que herede de SQLiteOpenHelper, la cual es una clase perteneciente
a la librería de SQLite y después modi�car los método de la clase mostrados en la
Tabla 5.2.
Tabla 5.2: Métodos empleados de la clase SQLiteOpenHelperMétodo Descripción
constructorLlama al constructor de la clase padre y
especi�ca el nombre y versión de la base de datos
onCreateDe�ne la estructura de las tablas y carga datos iniciales
Se llama cuando se crea por primera vez la base de datos
onUpgrade Se llama cuando la base de datos se actualiza
El módulo de almacenamiento de datos contiene la información relacionada a las
imágenes que serán empleadas como marcadores no convencionales en el framework.
La Tabla 5.3 muestra los campos que se emplean.
Tabla 5.3: Campos empleados en el módulo de almacenamiento de datosCampo Tipo de dato Descripción
Id INTEGER Identi�cador del marcador almacenado
Can_puntos INTEGERCantidad de puntos de interés
detectados en cada marcador
Latitud REAL Latitud a la que fue localizado el marcador
Longitud REAL Longitud a la que fue localizado el marcador
Descriptor TEXTDescriptor de características de los puntos
de interés detectados en la imagen
Aumento BLOBInformación a aumentar en la
pantalla del dispositivo
Para guardar la información en el módulo de almacenamiento de datos se realiza el
proceso que indica el diagrama de �ujo que se muestra en la Figura 5.1.
62

Figura 5.1: Diagrama de �ujo para guardar un marcador
El proceso que se muestra en la Figura 5.1 para guardar un marcador inicia activando
la cámara del dispositivo para capturar la fotografía del marcador a emplear, si no
se tomo una fotografía se sale del proceso, en caso contrario se toma la fotografía
y se le aplica el algoritmo SURF a la fotografía tomada y se obtiene la información
de geolocalización por parte del módulo de procesamiento, una vez que se procesó
la imagen, se abre el manejador de datos para guardar la información extraída de la
fotografía y se cierra el manejador de datos.
Para obtener la información almacenada para el emparejamiento de imágenes se realiza
el proceso que muestra el diagrama de �ujo de la Figura 5.2.
63

Figura 5.2: Diagrama de �ujo para obtener la información de los marcadores
Para obtener la información de los marcadores almacenados como se muestra en la
Figura 5.2 y poder emparejar su información con la del módulo de captura y edición
de video, inicialmente se abre el manejador de datos, se inicializa un ciclo que recorra
desde el primer marcador hasta el último almacenado y se compara la información
del manejador con la que envía el módulo de captura y edición de video, el proceso
termina cuando se han recorrido todos los marcadores almacenados.
5.1. Pruebas y resultados del módulo de almace-
namiento de datos
La prueba que se realizó para comprobar el funcionamiento del módulo consistió en ge-
nerar una aplicación que almacena directamente en el módulo la información generada
de procesar el algoritmo SURF con la información de geolocalización del dispositivo
al tomar las imágenes. La Figura 5.3 muestra el resultado de ésta prueba.
64

Figura 5.3: Prueba del módulo de almacenamiento de datos
En la Figura 5.3 se observan los datos que se almacenan al procesar una imagen,
se muestra el identi�cador de la imagen, las coordenadas de latitud y longitud, el
descriptor de los puntos de interés de la imagen y la información que se almacena para
el aumento de la realidad, es posible realizar búsquedas de los marcadores almacenados
en el módulo a través de su identi�cador. La información de los descriptores de los
puntos de interés se almacena en un único campo de tipo String, la información a
aumentar se almacena como un tipo de datos blob, debido a que éste tipo de datos
permite almacenar imágenes como un arreglo de bytes, por lo que la imagen debe ser
convertida al almacenar y regresada a su formato al mostrarse en pantalla.
65

Página intencionalmente en blanco
66

Capítulo 6
Módulo de captura y edición de
video
El módulo se encarga de capturar los fotogramas del video que se captura por medio
de la cámara del dispositivo para realizar el procesamiento de imágenes a cada uno de
ellos y mostrar la información que resulta del mismo.
6.1. Captura de video
Para capturar el video que genera el dispositivo Android, se requiere emplear las
librerías hardware y view y se describen en la Tabla 6.1.
Tabla 6.1: Librerías empleadas para la captura de videoLibrería Clases Descripción
Hardwarecamara Establece los parámetros de la cámara
camara.PreviewCallback Obtiene los fotogramas previos
view
SurfaceView Proporciona la super�cie de visualización
SurfaceHolder
Permite controlar las características de
la super�cie y monitorear los
cambios que se realicen
En la Figura 6.1 se muestra el diagrama de �ujo del procedimiento para el desarrollo
del módulo.
67

Figura 6.1: Diagrama de �ujo para la captura de video
Para capturar el video de la cámara del dispositivo como se muestra en la Figura 6.1,
primero se genera la super�cie donde se visualizará el video, se abre la cámara del
dispositivo y se accede a los parámetros de la cámara para especi�car el tamaño de
la imagen a emplear y se actualiza la información de los parámetros, se establece la
super�cie a utilizar para la vista previa de la información y se obtienen los fotogramas
previos del video capturado para enviarse a la clase de edición de video para procesarlos.
6.2. Edición de video
Al obtener los fotogramas por parte de la captura de video se realiza el procesamiento
de los mismos, para lo cual se emplean las librerías de Android que se muestran en la
Tabla 6.2:
68

Tabla 6.2: Librerías empleadas para la edición de videoLibrerías Clases Descripción
view View
Para la construcción de la interfaz de usuario.
Establece el área en la pantalla donde se mostrarán resultados.
Emplea el método OnDraw para renderizar el contenido.
graphicsCanvas Se emplea para dibujar los grá�cos en pantalla
Bitmap Se emplea para trabajar con imágenes de mapa de bits
El procedimiento para desarrollar el módulo es el que se muestra en el diagrama de
�ujo de la Figura 6.2.
Figura 6.2: Diagrama de �ujo para la edición de video
Para la edición de video como se muestra en la Figura 6.2 primero se dibuja la vista
69

donde se va a colocar la imagen procesada, se revisa si se recibió una imagen por parte
de la clase de captura, si no fue recibida �naliza el proceso en caso contrario se manda
al módulo de procesamiento para aplicarle el algoritmo SURF a la imagen y obtener
la información de geolocalización, ésta información que se obtiene de la imagen es
comparada con la información recibida por el módulo de almacenamiento, si la imagen
se encuentra dentro de un rango establecido en su información de geolocalización se
empareja con la imagen almacenada, en caso contrario, se checa la siguiente imagen,
hasta recorrer todos los marcadores almacenados, si no existió emparejamiento de
imágenes entonces se dibuja en pantalla la imagen que se recibió de la clase de captura,
en caso de que exista un emparejamiento, se obtiene la información a aumentar por
parte del manejador de datos, se dibuja la imagen recibida a través de la clase de
captura y se dibuja la información a aumentar en pantalla.
6.3. Pruebas y resultados del módulo de captura
y edición de video
Se realizaron pruebas en el manejo de video en un dispositivo móvil, se generó una
aplicación para trabajar con la cámara del dispositivo, en la cual, se realizan operacio-
nes con los fotogramas que se obtienen por la cámara. En la aplicación se convierte
el video que genera el dispositivo a escala de grises, se emplea el tamaño de imagen
de 320 x 240. El primer paso para realizarlo es establecer los permisos para el uso
de la cámara del dispositivo y abrir la cámara por medio del método camera.open().
El método abstracto onPreviewFrame() es el que permite accesar a los fotogramas
que fueron mostrados por la cámara del dispositivo, al almacenarlos en un arreglo de
byte, es posible modicarlos para realizar el procesamiento que se requiera, en este caso
convertir el video a escala de grises. Antes de poder hacer la conversión, es necesa-
rio convertir el formato YUV que es con el que genera las imágenes el dispositivo,
a formato RGB, con el cual es más sencillo realizar las modicaciones necesarias. El
resultado se observa en la Figura 6.3.
70

Figura 6.3: Prueba del módulo de captura y edición de video
Para comprobar el funcionamiento al superponer información en la visualización de
pantalla, se empleó la librería graphics.Canvas para dibujar texto y una imagen, los
resultados se observan en la Figura 6.4.
Figura 6.4: Superposición de información en la visualización de pantalla
Las librerías que proporciona Android para el manejo de los parámetros de la cá-
mara permiten procesar los fotogramas individualmente y manipular el tamaño de la
imagen que genera la cámara del dispositivo para adaptarlo a los requerimientos así
como implementar la superposición de elementos a la vista con el empleo de clases
pertenecientes al sistema.
71

Página intencionalmente en blanco
72

Capítulo 7
Pruebas y resultados
En el presente capítulo se muestran las pruebas realizadas para analizar el funciona-
miento de los módulos del framework, así como los resultados obtenidos. Se desa-
rrollaron en el IDE Eclipse versión 4.2.1 con el plugin ADT versión 22.0.1 para el
desarrollo en Android. Para realizar las pruebas de los módulos en dispositivos móviles
se emplearon los dispositivos de la Tabla 7.1.
Tabla 7.1: Dispositivos móviles empleados para las pruebas de funcionamiento delframework
Característica
Sony Samsung Samsung Asus
Xperia Galaxy Galaxy Transformer
U Tab 2 Ace Pad Tf300t
Versión del2.3 4.0 2.3 4.2
S. O.
Cámara5 3 5 5
(megapixeles)
Pantalla (pixeles) 854x480 1024x600 320x480 2560x1600
Memoria interna 8 GB hasta 32 GB 158 MB 32 GB
RAM 512 MB 1 GB 278 MB 2 GB
ProcesadorDual Core a Dual Core a Qualcomm a Nvidia Tegra 4
1 GHz 1GHz 800 MHz a 1.9 GHz
CompatibilidadSi Si Si Si
GPS
73

7.1. Pruebas y resultados del framework
Se generó una aplicación de prueba que integra la arquitectura del framework desa-
rrollado, la guía para el empleo del framework se muestra en el Anexo C. La pantalla
de inicio de la aplicación se muestra en la Figura 7.1. La pantalla se compone por 2
botones los cuales dan acceso a las funciones del framework: el botón base es el que
permite guardar un nuevo marcador en el módulo de almacenamiento de datos y el
botón aumento permite accesar a la cámara del dispositivo y mostrar los resultados
del módulo de captura y edición de video.
Figura 7.1: Pantalla de inicio de la aplicación de prueba
El código que implementa ésta pantalla es el que se muestra en el Código 7.1, permite
iniciar la actividad seleccionada al dar click sobre algúno de los dos botones.
p u b l i c vo i d aumento ( View v ) {I n t e n t i = new I n t e n t (Aumento . t h i s , Video . c l a s s ) ;s t a r t A c t i v i t y ( i ) ;
}p u b l i c vo i d base ( View v ) {
I n t e n t i = new I n t e n t (Aumento . t h i s , Base . c l a s s ) ;s t a r t A c t i v i t y ( i ) ;
}
Código 7.1: Pantalla de inicio
La Figura 7.2 muestra la pantalla que permite almacenar un nuevo marcador en el
módulo de almacenamiento. Las opciones que brinda son: a) Tomar foto, permite
74

acceder a la cámara del dispositivo para tomar la fotografía del marcador que se desea
almacenar, b) buscar información, accesa a la galería del dispotivo para seleccionar
la imagen que se desea superponer al marcador cuando sea reconocido, c) guardar,
procesa la imagen y guarda la información en el módulo de almacenamiento de datos
y d) ver registro, permite realizar una búsqueda por identi�cador en el manejador de
datos para ver la información almacenada.
Figura 7.2: Pantalla para guardar un marcador en el módulo de almacenamiento
El Código 7.2 lo implementa la actividad para el funcionamiento de los botones de la
pantalla y el método onActivityResult que permite accesar a la galería del dispositivo
lo cual se observa en la Figura 7.3, una vez que se tomo una fotografía y se seleccionó
la imagen a aumentar, se guarda la información resultante del procesamiento de la
fotografía tomada y se muestra un aviso de que se ha guardado la información como
se observa en la Figura 7.4, por último al seleccionar la opción ver registro, accesa a la
información del módulo de almacenamiento de datos para mostrar los datos guardados
del marcador cuyo identi�cador fue seleccionado como se muestra en la Figura 7.5.
75

impor t com . l i b r e r i a . a lmacenamiento . Manejador ;p u b l i c vo i d toma ( View v ) {
s t a r t A c t i v i t y F o r R e s u l t ( f o t o . tomar_foto ( ) , 1 ) ;}p u b l i c vo i d busca ( View v ){
s t a r t A c t i v i t y F o r R e s u l t ( f o t o . busca r_foto ( ) , 2 ) ;}p r o t e c t e d vo i d o nA c t i v i t y R e s u l t ( i n t requestCode ,i n t r e su l tCode , I n t e n t data ) {
i f ( r eques tCode == 2){Ur i s e l e c t e d Image = data . getData ( ) ;InputSt ream i s ;t r y {
i s =ge tCon t en tRe s o l v e r ( ) .open InputSt ream ( s e l e c t e d Imag e ) ;Bu f f e r ed I npu tS t r eam b i s =new Bu f f e r ed I npu tS t r eam ( i s ) ;Bitmap bitmap = BitmapFactory .decodeStream ( b i s ) ;bitmap1 = Bitmap .c r ea t eSca l edB i tmap ( bitmap , 320 , 240 , t r u e ) ;
} ca tch ( F i l eNotFoundExcep t i on e ) {}}
}p u b l i c vo i d guarda ( View v ){
f o t o . guarda_foto ( bitmap1 ) ;}p u b l i c vo i d v e r ( View v ){
I n t e n t i = new I n t e n t ( g e tApp l i c a t i o nCon t e x t ( ) ,R e g i s t r o . c l a s s ) ;s t a r t A c t i v i t y ( i ) ;
}
Código 7.2: Guardar un marcador en el módulo de almacenamiento
76

Figura 7.3: Acceso a la galería del dispositivo
Figura 7.4: Guargar la información del marcador en el módulo de almacenamiento
Figura 7.5: Ver registro almacenado en el módulo de almacenamiento
77

Al seleccionar la opción de aumento en la pantalla que se muestra en la Figura 7.1 se
accesa al módulo de captura y edición de video para procesar los fotogramas obtenidos
del video, inicialmente compara las coordenadas de latitud y longitud del fotograma
capturado y de los marcadores almacenados, si las coordenadas son cercanas, aplica el
algoritmo SURF al fotograma capturado, si encuentra un marcador entonces superpone
la información relacionada en la pantalla del dispositivo, el código 7.3 se emplea para
accesar al módulo de captura y edición de video y el resultado de la prueba se observa
en las Figuras 7.6 y 7.7.
impor t com . l i b r e r i a . c a p t u r a y e d i c i o n . S a l i d a ;p u b l i c c l a s s Video ex t end s A c t i v i t y {
S a l i d a s a l i d a ;@Over r idep r o t e c t e d vo i d onCreate ( Bundle s a v e d I n s t a n c e S t a t e ) {
supe r . onCreate ( s a v e d I n s t a n c eS t a t e ) ;getWindow ( ) . s e t F l a g s (WindowManager . LayoutParams .FLAG_FULLSCREEN, WindowManager . LayoutParams .FLAG_FULLSCREEN ) ;requestWindowFeature (Window .FEATURE_NO_TITLE) ;s a l i d a=new Sa l i d a ( g e tApp l i c a t i o nCon t e x t ( ) ) ;s e tContentV iew ( s a l i d a . ge tCaptu ra ( ) ) ;addContentView ( s a l i d a . g e tEd i c i o n ( ) ,new LayoutParams ( LayoutParams .WRAP_CONTENT,LayoutParams .WRAP_CONTENT) ) ;
}}
Código 7.3: Acceder al módulo de captura y edición de video
Figura 7.6: Realidad aumentada en el dispositivo móvil marcador 1
78

Figura 7.7: Realidad aumentada en el dispositivo móvil marcador 2
El tamaño de la aplicación generada es de 1.31 MB y el tamaño promedio de cada
marcador almacenado es de 60KB. Con el funcionamiento de la aplicación se validó
la correcta integración del framework.
79

Página intencionalmente en blanco
80

Capítulo 8
Conclusiones y trabajos futuros
8.1. Conclusiones
En el presente proyecto de investigación se diseñó y desarrolló un framework para
el desarrollo de realidad aumentada para dispositivos móviles con sistema operativo
android. El framework se basa en una arquitectura de 4 módulos: módulo de aplicación,
módulo de procesamiento, módulo de almacenamiento de datos y módulo de captura
y edición de video.
El algoritmo que se implementó para el reconocimiento de marcadores no convencio-
nales permite el emparejamiento de imágenes con cambios en: a) Iluminación donde
se presenta invarianza siempre que el marcador sea completamente visible en la ima-
gen, b) rotación en un rango de 45°, 315° y 180°, sin embargo para otros ángulos de
rotación la invarianza es mayor al 60% y c) escala donde la invarianza es mayor ante
la disminución del tamaño del marcador en un 90% y 80%, ésta invarianza va dis-
minuyendo conforme el tamaño del marcador disminuye en las imágenes a comparar,
siendo apartir del 30% cuando no existe emparejamiento de imágenes.
La arquitectura modular del framework permite que el algoritmo SURF puede ser sus-
tituido en el módulo de procesamiento por otro algoritmo basado en la detección de
puntos de interés, siempre y cuando éste algoritmo genere un descriptor de caracte-
rísticas de puntos de interés.
Para la construcción del espacio-escala que requiere el algoritmo SURF se establecieron
los valores de 2 octavas y 3 intervalos con imágenes con resolución de 320 x 240,
81

aunque éstos valores pueden ser módi�cados por el desarrollador que implemente
el framework, sin embargo al incrementar los valores de las octavas, intervalos y la
resolución de las imágenes se incrementa el tiempo de ejecución del algoritmo.
Si el umbral para la detección de puntos de interés se incrementa, entonces la cantidad
de puntos de interés emparejados disminuye lo cual incrementa la probabilidad de falsos
positivos debido a que el incremento del umbral disminuye la cantidad de puntos de
interés detectados como se observa en la Figura 4.13.
Si el umbral para el emparejamiento de imágenes se incrementa, entonces se incre-
menta la probabilidad de tener falsas aceptaciones ésto debido a que incrementa la
cantidad de puntos de interés a emparejar como se observa en la Figura 4.14.
Si el umbral para la aceptación del emparejamiento de imágenes incrementa, se incre-
menta la probabilidad de tener falsos rechazos debido a que aumenta la cantidad de
puntos de interés emparejados como se observa en la Figura 4.15.
El empleo de la información de geolocalización reduce los tiempos en la detección de los
marcadores no convencionales ésto debido a que solo son comparados los marcadores
que se encuentran dentro de un rango de geolocalización y depende de la cantidad de
marcadores que se encuentran dentro del rango.
El espacio que ocupa la aplicación en el dispositivo incrementa en proporción a la can-
tidad de puntos de interés detectados almacenados en el módulo de almacenamiento
de datos, la aplicación inicialmente tiene un tamaño de 1.31 MB y en promedio cada
marcador almacenado tiene un tamaño de 60 KB disminuyendo al detectar menos
puntos de interés por marcador.
Al almacenar el descriptor de características en lugar de las imágenes se reduce la
cantidad de datos que se guardan en el módulo de almacenamiento debido a que solo
se almacena una cadena que contiene al descriptor en lugar de la imagen completa.
El empleo de dispositivos móviles con procesador mayor a 1.9 GHz disminuye los
tiempos de ejecución requeridos para el funcionamiento del framework debido a que
tienen una mayor velocidad de procesamiento.
82

8.2. Publicaciones
Se generó una publicación como resultado del presente proyecto de investigación (ver
anexo D).
Análisis de la realidad aumentada en dispositivos móviles, L. S. C. Jorge
Stefan Cruz León, M. en C. Jazmín Rodríguez Flores, M. en C. Jo-
súe Román Martínez Mireles, Simposio Iberoamericano Multidisciplinario de
Ciencias e Ingenierías, 379-384, Septiembre 2013.
8.3. Trabajos futuros
Con la realización del proesente proyecto de investigación es posible desarrollar apli-
caciones de realidad aumentada con el empleo de marcadores no convencionales y
geolocalización mediante la implementación del framework. Como trabajos futuros se
pueden mencionar los siguientes puntos:
Optimizar el código del framework para disminuir los tiempos de ejecución.
Optimizar el algoritmo SURF para disminuir la cantidad de falsas aceptaciones
y falsos rechazos.
Optimizar el algoritmo SURF para incrementar la invarianza ante cambios de
rotación y escala.
Integrar la interacción del usuario con la información superpuesta en la visuali-
zación en pantalla.
Integrar la superposición de información en 3D.
83

Página intencionalmente en blanco
84

Referencias
[1] R. Bimber, O. y Raskar, Spatial Augmented Reality. A K Peters, 1 ed., 2004.
EUA.
[2] D. Abril, �Realidad aumentada,� Universidad Carlos III, 2010. Madrid, España.
[3] J. Carmigniani, �Augmented reality technologies, systems and applications,� Mul-
timed Tools Appl., no. 51, pp. 341� 377, 2010.
[4] A. Loup, �La realidad aumentada.� Universidad Católica "Nuestra Señora de la
Asunción". 2007. Paraguay.
[5] I. Sutherland, �A head mounted display three dimensional display,� Actas de la
Conferencia Fall Joint Computer, pp. 757�764, 1968.
[6] M. Krueger, �What should you wear to an arti�cial reality?,� in Arti�cial Reality
and Tele-existence, no. 1, pp. 51�62, ICAT, 1991.
[7] D. Caudell, T. y Mizell, �Augmented reality: an application of heads-up dis-
play technology to manual manufacturing processes,� in System Sciences, vol. 2,
pp. 659 � 669, IEEE, 1992.
[8] M. B. y. S. D. Feiner, S., �Knowledge-based augmented reality,� Communications
of the ACM - Special issue on computer augmented environments: back to the
real world, vol. 36, pp. 53�62, Julio 1993.
[9] G. R. y. K. R. Loomis, J., �Personal guidance system for the visually impaired
using gps, gis, and vr technologies,� in Proceedings of Conference on Virtual
Reality and Persons with Disabilities, 1993.
85

[10] K. Rekimoto, J. y Nagao, �The world through the computer: Computer aug-
mented interaction with real world environments,� Proceedings of the 8th annual
ACM symposium on User interface and software technology, pp. 29�36, 1995.
[11] B. Thomas, �Arquake: the outdoor augmented reality gaming system,� Commu-
nications of the ACM - Internet abuse in the workplace and Game engines in
scienti�c research, vol. 45, pp. 36�38, Enero 2002.
[12] T. Immersion, �Introducing ar+,� 2014. http://www.t-immersion.com/ar-logo/
Accesado julio, 2014.
[13] iabMéxico, �Estudio de usos y hábitos de dispositivos móviles,� 2014.
http://iabmexico.com/Infogra�as/. Accesado marzo, 2014.
[14] ComputerWorld, �Habrá 200 millones de usuarios de realidad aumentada en 2018:
estudio,� 2013. http://www.computerworldmexico.mx/. Accesado enero, 2014.
[15] J. G. y. Y. W. Jing, C., �Mobile augmnted reality system for personal museum
tour guide applications,� tech. rep., Laboratorio de Tecnología de imagen foto-
electrónica y Sistema, Ministerio de educación de China, 2011.
[16] IpsosMediaCT, �Google our mobile planet: Mexico,� 2012.
http://www.usmediaconsulting.com. Accesado junio 2013.
[17] TomiAhonenconsulting, �Smartphone penetration rates by country! wehavegood
data,� 2011. http://communitiesdominate.blogs.com/brands. Accesado junio
2013.
[18] A. Fosk, �Futuro digital latinoamérica 2013,� 2013.
http://www.comscore.com/lat/Insights/. Accesado junio 2013.
[19] Hidden, �Augmented reality marketing strategies: The how to guide for marke-
ters,� 2011. http://hiddenltd.com/. Accesado junio, 2013.
[20] Layar, �Home: Layar,� 2013. https://www.layar.com/. Accesado agosto, 2013.
[21] Mixare, �mixare | free open source augmented reality engine,� 2013.
http://www.mixare.org/. Accesado agosto, 2013.
[22] C. J. y. S. A. Bellón, S., �Look! framework para aplicaciones de realidad aumen-
tada en android,� tech. rep., Universidad Complutense de Madrid, 2010.
86

[23] T. Domhan, �Augmented reality on android smartphones.� Universidad de Edu-
cación Cooperativa Baden-Württemberg. 2010. Alemania.
[24] B. Brügge, �Study on software architectures for augmented reality systems.� Uni-
versidad de Munich. 2002. Alemania.
[25] y. K. V. Behzadan, A., �Georeferenced registration of construction graphics in
mobile outdoor augmented reality,� Journal of Computing in Civil Engineering,
pp. 247�258, 2007.
[26] H. López, �Análisis y desarrollo de sistemas de realidad aumentada,� Master's
thesis, Universidad Complutense de Madrid, 2009. Accesado agosto, 2013.
[27] T. Turunen, �Mobile ar requirements for location based social networks,� The
International Journal of virtual Reality, vol. 9, no. 4, pp. 67�78, 2010.
[28] y. Z. X. Jie, L., �Invariant based augmented reality on mobile phones,� Journal
of Multimedia, vol. 5, no. 6, pp. 588�595, 2010.
[29] S. M. P. O. y. S. J. Prochazka, D., �Mobile augmented reality applications.�
Universidad Mendel. 2011. Brno, Rep. Checa.
[30] E. Gaip, �A framework for outdoor mobile augmented reality,� IJCSI International
Journal of Computer science Issues, vol. 9, no. 1, pp. 419�423, 2012.
[31] M. Santoso, �Development of edutainment content for elementary school using
mobile augmented reality,� vol. 39, 4th International Conference on Computer
Research and Development, 2012.
[32] J. Yim, �Implementation of building recognition android app,� International Jour-
nal of Multimedia and Ubiquitous Engineering, vol. 7, no. 2, pp. 37�52, 2012.
[33] ISO/IEC/IEEE, �Systems and software engineering. architecture description
iso/iec/ieee 42010,� 2014. http://www.iso-architecture.org/ieee-1471, Accesado
25 de agosto de 2014.
[34] A. Baz, �Dispositivos móviles.� Universidad de Oviedo. 2009. España.
[35] N. Arroyo, Información en el móvil. 1 ed., diciembre 2011. Barcelona, España.
87

[36] F. Milgram, P y Kishino, �Taxonomy of mixed reality visual displays,� IEICE
Transactions on Information and Systems, vol. E77-D, pp. 1321�1329, Diciembre
1994.
[37] R. Azuma, �A survey of augmented reality,� Massachusetts Institute of Techno-
logy, vol. 6, pp. 355�385, Agosto 1997.
[38] N. R. y. S. D. Hofmeister, C, Applied Software Architecture. Object Technology
Series. Addison-Wesley, 2000.
[39] Microsoft, �De�nición y descripción de un pixel,� Octubre 2013.
http://support.microsoft.com/kb/253680/es. Accesado febrero, 2014.
[40] O. Boullosa, �Estudio comparativo de descriptores visuales para la detección de
escenas cuasi-duplicadas.� Universidad Autónoma de Madrid. 2011. España.
[41] A. y. C. M. Romero, �Comparativa de detectores de característicasticas visuales
y su aplicación al slam,� X workshop de agentes físicos, 2009.
[42] G. A. R. O. y. b. D. Ballesta, M., �Análisis de detectores y descriptores de ca-
racterísticas visuales en slam en entornos interiores y exteriores,� RIAI, vol. 7,
pp. 68�80, Abril 2010.
[43] T. T. y. V. G. L. Bay, H., �Surf: Speeded up robust features,� pp. 404�417,
European Conference on Computer Vision, 2006.
[44] C. Evans, �Notes on the open surf library,� 2009. http://www. chrisevansdev.com.
Accesado agosto, 2013.
[45] M. Viola, P. y Jones, �Rapid object detection using a boosted cascade of simple
features,� IEEE, 2001. Mitsubishi Electr. Res. Labs., Cambridge, MA, USA.
[46] J. X. y. W. Y. Han, B., �Optimized algorithm for gaussian second order derivative
�lters in fast hessian detector,� IEEE, 2010. China.
[47] D. Brown, M. y Lowe, �Invariant features from interest point groups,� pp. 656�
665, British Machine Vision Conference, 2002.
[48] D. Sorita, Reconocimiento automático mediante patrones biométricos de huella
dactilar. PhD thesis, Universidad Politécnica de Madrid, 2003. Accesado julio,
2014.
88

[49] M. J. Burgueño, �Las curvas roc en la evaluación de las pruebas diagnósticas,�
Medicina clínica, vol. 104, no. 17, pp. 661�670, 1995.
[50] I. Google, �What is android?,� 2014. http://developer.android.com. Accesado
junio, 2013.
89

Página intencionalmente en blanco
90

Anexo A
Diagrama de clases de la
arquitectura del framework
La Figura A.1 muestra el diagrama de clases de la arquitectura del framework obtenido
a través de ingeniería inversa con el empleo de la herramienta Enterprise Architect 6.5
versión de prueba.
91

Figura A.1: Diagrama de clases de la arquitectura del framework
92

Anexo B
Arquitectura de Android
El sistema operativo Android se compone por una arquitectura formada por capas para
facilitar la creación de las aplicaciones, así mismo ésta arquitectura permite el acceso
a capas inferiores por medio de librerías para evitar la programación a bajo nivel como
se indica en el sitio o�cial expuesto en [50], la Figura B.1 muestra la arquitectura en
capas de Android.
Figura B.1: Arquitectura de Android obtenido de [50]
93

A continuación se explica cada una de las capas que componen la arquitectura de
Android.
Kernel de Linux El núcleo del sistema operativo de Android se basa en el kernel de
Linux versión 2.6 adaptado a las características del hardware en el que se ejecuta. Actúa
como una capa de abstracción entre el hardware y las demás capas de la arquitectura,
el desarrollador emplea librerías para poder acceder al núcleo del sistema operativo.
El kernel se encarga de gestionar los recursos del dispositivo y del sistema operativo.
Librerías Son las bibliotecas nativas de Android, están escritas en C o C++ y com-
piladas para cada arquitectura especí�ca de los dispositivos. El objetivo de las librerías
es brindar funcionalidad a las aplicaciones en tareas repetitivas evitando codi�carlas
continuamente. Entre las librerías incluidas están: OpenGL (motor grá�co), bibliotecas
multimedia (formato de audio, video e imagen), Webkit (navegador), SSL (cifrado de
comunicaciones), FreeType (fuentes de texto) y SQLite (gestor de base de datos).
Entorno de ejecución No se considera una capa, ya que se forma por librerías.
Su principal componente es la máquina virtual Dalvik. Las aplicaciones se codi�can
en JAVA y son compiladas en un formato en especí�co para la máquina virtual las
ejecute.
Framework de aplicaciones Se forma por las clases y servicios que emplean las
aplicaciones, son librerías que acceden a los recursos de las capas inferiores por medio
de la máquina virtual Dalvik, las librerías que se encuentran en ésta capa son:
Activity Manager: Administra la pila de actividades de la aplicación y el ciclo de
vida de cada una de ellas.
Windows Manager: Organiza lo que se visualizará en pantalla, crea las super�cies
en la pantalla que emplearán las actividades.
Content Provider: Crea una capa que encapsula los datos a compartir entre las
aplicaciones.
Views: Son los elementos que ayudan a construir las interfaces de usuario: bo-
tones, etiquetas, cuadros de texto, entre otros.
94

Noti�cation Manager: Son los servicios que se emplean para noti�car al usuario
al mostrar alertas en la barra de estado.
Package Manager: Permite obtener información sobre los paquetes instalados
en el dispositivo y gestionar la instalación de nuevos paquetes.
Telephony Manager: Se emplea para realizar llamadas o enviar y recibir mensajes
de texto.
Resource Manager: Gestiona los elementos que son parte de las aplicaciones y
que se encuentran fuera del código.
Location Manager: Permite determinar la localización del dispositivo por medio
del GPS o redes disponibles.
Sensor Manager: Permite manejar el hardware del dispositivo, como el aceleró-
metro, brújula, sensor de presión, giroscopio, entre otros.
Cámara: Permite emplear las cámaras del dispositivo para tomar fotografías o
capturar video.
Multimedia: Permite reproducir y visualizar video, audio e imágenes.
Aplicaciones Incluye todas las aplicaciones del dispositivo, ya sea nativas, preins-
taladas o las que el usuario instala.
95

Página intencionalmente en blanco
96

Anexo C
Guía para la implementación del
framework
El framework se desarrolló en el IDE Eclipse con el plugin ADT para el desarrollo
en Android, para su implementación en el desarrollo de realidad aumentada en una
aplicación móvil en Android se requiere emplear 2 módulos del framework.
Almacenamiento de datos, para la gestión de los marcadores.
Captura y edición de video, para Iniciar el video de la cámara del dispositivo y
para visualizar en pantalla la realidad aumentada.
Para generar una aplicación no es necesario accesar al módulo de procesamiento,
debido a que éste módulo lo implementan en su codi�cación los módulos de almace-
namiento de datos y captura y edición de video. Para iniciar el video de realidad au-
mentada se requiere guardar al menos un marcador en el módulo de almacenamiento
de datos. Para implementar el framework se requiere importarlo al explorador de
proyectos y generar una nueva aplicación Android, se accesa a las propiedades de la
aplicación que se generó, en el apartado Android y en la opción Add. . . se selecciona
el framework y se aceptan las modi�caciones. Por último, en el AndroidManifest de
la aplicación se especi�ca que se empleará el framework dentro de la aplicación y los
permisos de usuario necesarios para que el framework accese a los servicios de Android
como se muestra en el Código C.1:
97

<a c t i v i t y and ro i d : name="com . l i b r e r i a . l i b r a r y . L i b r e r i a " ></a c t i v i t y ><uses−p e rm i s s i o n and ro i d : name="and ro i d . p e rm i s s i o n .CAMERA" /><uses−p e rm i s s i o n and ro i d : name="and ro i d . p e rm i s s i o n .ACCESS_FINE_LOCATION" />
Código C.1: AndroidManifest
Almacenamiento de datos Generar un nuevo Activity, la cual se encargará de ges-
tionar el empleo de los marcadores, los métodos que se implementan son: tomar_foto(),
buscar_foto(), guardar_foto() y ver(). Se crea una instancia de la clase Manejador
para poder gestionar el módulo de almacenamiento al guardar un nuevo marcador,
se inicializa en el método onCreate() y se le envía como parámetro el contexto de la
aplicación como se observa en el Código C.2:
Manejador f o t o= new Manejador ( g e tApp l i c a t i o nCon t e x t ( ) ) ;
Código C.2: Inicializar una instancia de la clase Manejador
Tomar una fotografía del marcador
En el activity de la clase se genera un nuevo botón y se especi�ca el método onClick
en el xml de la activity como se muestra en el Código C.3:
and ro i d : o nC l i c k="toma"
Código C.3: Método onClick del botón para tomar una fotografía
El botón al presionarse lanzará un nuevo activity con el objetivo de recibir el resultado.
El resultado del activity que se llamará será el que retorna el método tomar_foto()
de la instancia del manejador. En la clase del activity que se generó para el almace-
namiento de los marcadores se implementa el método del Código C.4:
p u b l i c vo i d toma ( View v ) {s t a r t A c t i v i t y F o r R e s u l t ( f o t o . tomar_foto ( ) , 1 ) ;}
Código C.4: Método para tomar fotografía
98

Debido a que el algoritmo que implementa el framework se basa en la detección de
puntos de interés de las imágenes, el contenido que esté en la fotografía del mar-
cador es el que será analizado, para evitar procesamiento de zonas que no sean de
interés se recomienda que el marcador que se capture en la fotografía esté contenido
completamente en la pantalla de la cámara para obtener un óptimo resultado.
Buscar una imagen para emplear como información a aumentar
El framework está implementado para que la información que se superponga en el
video sea una imagen, así mismo realiza una búsqueda en la galería del dispositivo para
seleccionar la imagen que se empleará, sin embargo, el desarrollador puede modi�car
ésta opción al accesar al método buscar_foto() de la clase Manejador. Para poder
realizar el procedimiento es necesario haber capturado de antemano un marcador. Se
requiere la creación de un botón en el activity de la clase y se especi�ca el método
onClick del botón en el xml de la activity como se muestra en el Código C.5:
and ro i d : o nC l i c k="busca "
Código C.5: Método onClick para el bóton buscar imagen
El botón permitirá lanzar un nuevo activity y obtener su resultado, el cual será el que
retorna el método buscar_foto() de la instancia del Manejador. Este procedimiento
requiere invocar al método onActivityResult en la clase de la aplicación para guardar
la imagen seleccionada del dispositivo como un Bitmap como se observa en el Código
C.6:
99

p u b l i c vo i d busca ( View v ){s t a r t A c t i v i t y F o r R e s u l t ( f o t o . busca r_foto ( ) , 2 ) ; }p r o t e c t e d vo i d o nA c t i v i t y R e s u l t ( i n t requestCode ,i n t r e su l tCode , I n t e n t data ) {
i f ( r eques tCode == 2){Ur i s e l e c t e d Image = data . getData ( ) ;InputSt ream i s ;t r y {
i s = ge tCon t en tRe s o l v e r ( ) .open InputSt ream ( s e l e c t e d Imag e ) ;Bu f f e r ed I npu tS t r eam b i s =new Bu f f e r ed I npu tS t r eam ( i s ) ;Bitmap bitmap =BitmapFactory . decodeStream ( b i s ) ;bitmap1 = Bitmap . c r ea t eSca l edB i tmap( bitmap , 320 , 240 , t r u e ) ;
} ca tch ( F i l eNotFoundExcep t i on e ) {}}
}
Código C.6: Método onActivityResult
Guardar un marcador
Para guardar el marcador en el módulo de almacenamiento se requiere haber capturado
una imagen y la información a aumentar. El Código C.7 se genera en el método onClick
que se inicializa en el xml del activity para almacenar el marcador:
and ro i d : o nC l i c k="guarda "
Código C.7: Método onClick del botón para almacenar un marcador
El botón llamará al método guardar_foto(Bitmap bitmap) de la clase Manejador
enviándole el Bitmap obtenido de la búsqueda en la galería como se muestra en el
Código C.8:
p u b l i c vo i d guarda ( View v ){f o t o . guarda_foto ( bitmap1 ) ;
}
Código C.8: Método para guardar una foto
100

Consulta al módulo de almacenamiento
Para realizar una consulta en el módulo de almacenamiento se requiere generar los
EditText donde se mostrará la información. Se genera un botón que permita llamar al
método ver(String id) de la clase Manejador enviando el identi�cador del marcador a
mostrar, el método devuelve un ArrayList de objetos de tipo Strings que contiene en la
posición 0 la cantidad de puntos de interés encontrados, en la posición 1 la latitud, en
la posición 2 la longitud y en la posición 3 el descriptor de características de los puntos
de interés. Para poder mostrar la información es necesario que esté almacenado al
menos un marcador en el módulo de almacenamiento de datos. En el xml del activity
se generán los EditText que contendrán la información y se de�ne el método onClick
del botón que iniciará el proceso como se muestra en el Código C.9:
and ro i d : o nC l i c k="c on s u l t a "
Código C.9: Método onClick del botón para consultar registros
Se inicializan los EditText en el método onCreate() de la clase del activity y se imple-
menta el método del Código C.10:
p u b l i c vo i d c o n s u l t a ( View v ){S t r i n g i d = t1 . getText ( ) . t o S t r i n g ( ) ;A r r a yL i s t <St r i ng> v a l=uno . v e r ( i d ) ;t2 . s e tTex t ( v a l . ge t ( 0 ) ) ;t3 . s e tTex t ( v a l . ge t ( 1 ) ) ;t4 . s e tTex t ( v a l . ge t ( 2 ) ) ;t5 . s e tTex t ( v a l . ge t ( 3 ) ) ;
}
Código C.10: Método para consultar registros
Captura y edición de video Para iniciar el video para mostrar la realidad au-
mentada se requiere que esté guardado al menos un marcador en el módulo de al-
macenamiento. Para generar el video se requiere crear una nueva activity en la cual
se creará una instancia de la clase Salida y en el método onCreate() de la clase de
la activity se inicializa la instancia enviándole el contexto de la aplicación como se
muestra en el Código C.11:
101

S a l i d a s a l i d a=new Sa l i d a ( g e tApp l i c a t i o nCon t e x t ( ) ) ;
Código C.11: Inicializar una instancia de la clase Salida
Para mostrar el video en la pantalla del dispositivo se requiere llamar al método
SetContentView() al cual se le envía el método getCaptura() de la clase Salida para
visualizar en la pantalla la información de la cámara del dispositivo como se observa
en el Código C.12:
se tContentV iew ( s a l i d a . ge tCaptu ra ( ) ) ;
Código C.12: Visualizar video
Para mostrar la información que se genera del procesamiento de la información se
genera el Código C.13 donde se llama al método addContentView() al cual en la
opción del View se le envía al método getEdición() de la clase Salida.
addContentView ( s a l i d a . g e tEd i c i o n ( ) , new LayoutParams ( LayoutParams .WRAP_CONTENT, LayoutParams .WRAP_CONTENT) ) ;
Código C.13: Visualizar video procesado
El framework permite que el desarrollador modi�que los módulos requeridos para
generar las aplicaciones así como sustituirlos por módulos que requiera emplear, siem-
pre y cuando las entradas y salidas de cada método utilicen los mismos formatos
requeridos como se muestra en la arquitectura del framework en el Capítulo 3 del
documento de tesis. Para un óptimo emparejamiento de las imágenes del video con
los marcadores se requiere que la imagen capturada por el video contenga únicamente
al marcador visible por la cámara del dispositivo para evitar el procesamiento de datos
no necesarios para el emparejamiento de las imágenes. El algoritmo que implementa
el framework permite el reconocimiento del marcador ante cambios de rotación, escala
e iluminación especi�cados en el Capítulo 4 del documento de tesis.
102

Anexo D
Publicación
A continuación se presenta la publicación generada con base al presente trabajo de
investigación.
103

Análisis de la Realidad Aumentada en Dispositivos Móviles
J. Cruz-León1, J. Rodríguez-Flores
2, J. Martínez-Mireles
3
1Maestria en Tecnologías de la Información/ CA-Cibernética y Cómputo Aplicado,Universidad Politécnica de Pachuca,
Zempoala, Hidalgo, México. CP. 43830. Tel. 7715477510, ext.2223, e-mail: [email protected]
Resumen (TIF)
La realidad aumentada es una tecnología que le brinda al usuario la posibilidad de adquirir información adicional sobre
el entorno que lo rodea. Debido a ésta función, en la actualidad se incrementó el desarrollo de aplicaciones que hacen
uso de ella. El presente artículo muestra una comparativa entre los principales sistemas operativos para dispositivos
móviles. Se mencionan las definiciones y características generales de la realidad aumentada, así como el desglose de
cada una. Además se realizó un análisis del estado del arte de ésta en los dispositivos móviles y los resultados que se
obtuvieron.
Palabras clave: Dispositivos Móviles, Geolocalización, Realidad Aumentada, Reconocimiento de Patrones.
Abstract (TIF)
Augmented reality is a technology that gives to the user the ability to acquire complementary information about the
surrounding environment, because of this feature, now increased the development of applications that make use of it.
This paper shows a comparison between the major mobile operating systems. This work mentions the definitions and
general characteristics of augmented reality, as well as a breakdown of each one. We also carried out an analysis of this
state of the art in mobile devices and present the results obtained.
Keywords: Augmented reality, geo localization, mobile devices, patterns recognition.
1. Introducción
La realidad aumentada es una tecnología que permite
superponer cualquier tipo de contenido virtual (audio,
video, imágenes o texto) sobre el entorno real, con el
objetivo de brindar mayor información de lo que se está
observando. Lo anterior se consigue al utilizar un
dispositivo que cuente con los elementos que se
requieren o mediante la combinación de diversos
dispositivos que permiten ésta interacción, como: una
cámara que capta las imágenes del mundo real, una
computadora que realiza el procesamiento de la imagen
recibida y genera la realidad aumentada y una pantalla
que muestra al usuario la información final. Debido a los
resultados que se obtienen con ésta tecnología, se
desarrollan aplicaciones que se utilizan en diferentes
campos de acción, como en medicina, arquitectura,
diseño, ciencias educativas, entre otras. Sin embargo, el
procesamiento que se requiere para realizar dichas
aplicaciones, dificulta explotarla en los dispositivos
móviles, puesto que cuentan con capacidades de
procesamiento limitadas.
2. Antecedentes
El desarrollo de tecnologías móviles que permiten la
comunicación entre las personas y localización de
lugares, así como la fácil adquisición de dispositivos
móviles (Smartphones, tabletas) favorece el auge de
aplicaciones novedosas y de gran utilidad para el usuario,
las cuales emplean los recursos que brindan los
dispositivos, entre ellas la realidad aumentada, como se
observa en [1].
2.1 Dispositivos móviles
Un dispositivo móvil es un aparato portable, con
velocidad de procesamiento, acceso a redes WiFi,
memoria limitada, para ejecutar aplicaciones generales
[2].
Sistemas operativos para dispositivos móviles
El sistema operativo es el software básico de un
dispositivo que provee una interfaz entre las aplicaciones
instaladas, el hardware y el usuario [2]. Existen
diferentes plataformas como: Symbian OS, Windows
Phone, Android, iOS y Blackberry OS. A continuación se
describe cada una.
Symbian OS
Lo desarrolló Nokia, Sony Ericsson y Samsung entre
otras empresas en el año de 1998. Adapta e integra todo
tipo de aplicaciones y proporciona las rutinas, los
protocolos de comunicación, el control de archivos y los
servicios para su funcionamiento. Está escrito en C++
[3].

Windows Phone
Se desarrolló en 2010 como sucesor de la versión
Windows Mobile que genera Microsoft. Es un sistema
operativo móvil compacto que se basa en el núcleo del
sistema operativo de Windows NT. Su diseño es similar
a las versiones de escritorio de Windows. El lenguaje de
desarrollo de aplicaciones que utiliza es C# [4].
Android
Se desarrolló en 2008, su núcleo se basa en Linux,
aunque su diseño inicial fue para funcionar en
dispositivos móviles en la actualidad también es utilizado
en tabletas y PC. Su estructura se compone de
aplicaciones que se ejecutan en un framework JAVA de
aplicaciones orientadas a objetos sobre el núcleo de las
bibliotecas de JAVA en una maquina virtual Dalvik [5].
iOS para iPhone
Se desarrolló en 2007 por Apple, originalmente para el
iPhone, siendo también se utiliza en el iPod Touch e
iPad, se deriva de Mac OS X. En 2008 se liberó un SDK
gratuito el cual permite hacer aplicaciones para iPhone
con el lenguaje de programación Objetive-C [6].
Blackberry OS
Se desarrolló en 1999 por la empresa canadiense RIM
(por las siglas en inglés de Research In Motion) para sus
dispositivos. El sistema permite aplicaciones multitarea y
tiene soporte para diferentes métodos exclusivos de RIM
(trackwheel, trackball, touchpad y pantallas táctiles). El
lenguaje de desarrollo de aplicaciones que utiliza es
JAVA [7].
Comparativa de Sistemas Operativos Móviles
Debido a que el kernel es el núcleo del sistema operativo,
gestiona los recursos del sistema, por esto se debe
conocer cuál es el kernel que maneja cada sistema
operativo (ver tabla 1).
Tabla 1. Comparativa de sistemas operativos Sistema
operativo
Kernel Desarrollador Lenguaje de
desarrollo
Android Linux con
maquina
virtual Dalvik
Google JAVA
Blackberry
OS
QNX RIM JAVA
iOS de iPhone Mac OS X Apple Objetive-C
Windows
phone 8
Windows NT Microsoft C#
Symbian OS EKA 2 Nokia C++
Android no es un sistema operativo propietario, esto
significa que la empresa que lo fabrica no es la dueña del
sistema operativo, lo que pueda ser instalado en diversos
dispositivos, así mismo, por ser de código abierto
permite el libre desarrollo de aplicaciones para la
plataforma.
.
2.3 Realidad Aumentada
La realidad aumentada es una tecnología que tiene sus
orígenes a mediados del siglo XX [8]. En 1968,
Sutherland [9] desarrolló “La espada de Damocles” que
era un display de cabeza para generar la primera realidad
virtual y realidad aumentada en un dispositivo de este
tipo.
En el año de 1994 Paul Milgram y Fumio Kishino [10],
definen la realidad de Milgram-Virtuality Continuum
como un entorno que se observa desde la parte real, hasta
la parte virtual, de modo continuo, en la parte media de
dicho entorno se encuentra la realidad mixta, que es la
mezcla entre ambos entornos. La realidad aumentada es
la parte más cercana a la realidad, con ciertos aspectos
virtuales (ver fig. 1).
Fig. 1. Realidad de Milgram-Virtuality Continuum
En 1997, Ronald Azuma [11] propone la definición más
aceptada de la realidad aumentada, establece a la realidad
aumentada como la unión de tres aspectos principales,
expuestos de la siguiente manera:
a) Combinar elementos reales, con elementos virtuales,
b) La relación de a) se da estrictamente en tiempo real y
c) La información que se muestra debe estar registrada en
3 dimensiones.
Tareas en la Realidad Aumentada
Existen cuatro tareas principales que se llevan a cabo al
implementar la realidad aumentada [8]:
Captación del entorno
Captura el entorno al cual se le superpondrá la
información virtual. Requiere de un dispositivo que
permita reconocer la escena para después procesarla. En
el caso de los dispositivos móviles es la cámara la que
realiza la tarea.
Identificación del entorno
Se encarga de analizar el entorno que se capturó, éste
proceso pude realizarse mediante el reconocimiento de
marcadores, estimación de la posición o por una
identificación híbrida la cual es una mezcla de ambas.
Aumento de la realidad
Es la tarea que superpone la información virtual (texto,
imagen, video, audio) en el entorno real que se capturó.
Realidad mixta
Entorno real
Realidad
aumentada
Virtualidad
aumentada Entorno virtual

Visualización
Es el último proceso que se realiza de la realidad
aumentada, consiste en mostrar el escenario aumentado
al usuario por medio de un dispositivo de visualización.
Arquitectura de Referencia de sistemas de realidad
aumentada
En 2002, Brügge [12] realiza un estudio entre 18
arquitecturas diferentes de realidad aumentada,
generando una arquitectura de referencia, la cual está
presente en todas ellas (ver Fig. 2). A continuación se
describe esta arquitectura:
Descripción de los paquetes de la arquitectura
Aplicación: Este paquete se encarga de la lógica del
sistema.
Tracking: Determina la posición y orientación de los
usuarios y objetos.
Control: Procesamiento de la información de entrada.
Presentación: Representación gráfica de la información.
Contexto: Recoge información del contexto.
Modelo del Mundo: Almacena información relacionada
con los objetos virtuales y reales.
Requerimientos de la Realidad Aumentada Móvil
Los requerimientos tecnológicos necesarios para generar
la realidad aumentada son [13]:
Procesador móvil: Se utiliza para procesar la
información de entrada y ejecutar la aplicación.
Hardware gráfico: Unidad de procesamiento gráfico
(GPU) para generar las imágenes virtuales.
Cámara: dispositivo que se utiliza para capturar las
imágenes de video del entorno en tiempo real.
Display: Para mostrar la vista de la realidad aumentada,
la superposición de las imágenes virtuales.
Acceso de redes: para permitir la conexión a accesos
remotos.
Sensores: GPS, magnetómetro, acelerómetro, para
especificar la posición y orientación del dispositivo.
Tipos de realidad aumentada
De acuerdo con Abril [8], existen dos tipos principales de
realidad aumentada que pueden llevarse a cabo:
Reconocimiento por marcadores.
Reconocimiento sin marcadores.
Reconocimiento por marcadores
Un marcador es una imagen reconocida por el software
de realidad aumentada. Este reconocimiento se realiza
por medio de su geometría, color o ambas características.
Un sistema adecuado de reconocimiento de patrones,
cuenta con un sensor que recoge la imagen del mundo
real, un mecanismo de extracción de características el
cual obtiene la información de utilidad y elimina aquella
irrelevante para el procesamiento, por último una etapa
de toma de decisiones para el reconocimiento del
marcador y la interpretación de la escena.
Reconocimiento sin marcadores
Puede llevarse a cabo mediante identificación por
posicionamiento o reconocimiento de imágenes.
Identificación por posicionamiento
La identificación de entorno mediante este proceso se
realiza debido a la estimación de la posición y
orientación del usuario. Existen sistemas de
posicionamiento que brindan la información necesaria al
dispositivo para realizar este tipo de realidad aumentada.
El Sistema de Posicionamiento Global (por las siglas en
inglés de GPS) es un servicio de los EE.UU. que
proporciona a los usuarios información sobre
navegación, posicionamiento y cronometría.
Reconocimiento de imágenes
Es el proceso que consiste en extraer, de una imagen o un
segmento de video, la información necesaria del entorno
para identificar la región a la cual se realizará la
superposición de elementos virtuales. El proceso se
realiza principalmente por medio de visión artificial, en
el caso de reconocimiento de escenarios de manera
automática, o por medio de marcadores, los cuales ya
están preestablecidos en el sistema. Se divide en dos
partes principales, la adquisición de la imagen, por medio
de cualquier dispositivo especializado y el procesamiento
digital de la imagen que se capturó, para obtener una
imagen con características mejor definidas para su
interpretación.
Fig. 2 Arquitectura de referencia

3. Estado del arte de realidad aumentada en
dispositivos móviles
A continuación se enlistan los frameworks de realidad
aumentada que existen actualmente, así como las
investigaciones académicas relacionadas con el análisis,
diseño y desarrollo de la tecnología.
3.1 Frameworks
Layar
Es una aplicación comercial de realidad aumentada para
Android, se basa tanto en geolocalización como en
marcadores, en específico códigos QR, sin embargo, no
mezcla ambos procesos. Utiliza el GPS, la brújula y otros
sensores del teléfono móvil para proporcionar una
visualización de varios puntos de interés ordenados por
capas o niveles, donde cada una maneja un aspecto
diferente. Para poder instalarlo se requiere sistema
operativo Android 1.5 o superior o iOs 3.1 o superior,
cámara digital, GPS, brújula, acelerómetro y conexión a
internet [14].
Mixare
Es un navegador de realidad aumentada de código
abierto (licencia GPLV3). Disponible para Android y para
iPhone 3GS. Muestra en la pantalla la información que se
encuentra alrededor del dispositivo, proveniente de
Twitter y wikipedia [15].
Look!
Es un software que se desarrolló como proyecto de fin de
carrera de la universidad Complutense de Madrid durante
el curso académico 2010-2011 [16]. Sus autores son
Sergio Bellón Alcarazo, Jorge Creixell Rojo y Angel
Serrano Laguna. Es un software libre bajo la licencia
GPLV3. El Software ofrece servicios de localización tanto
en exteriores por medio de GPS así como en interiores
utilizando señales WiFi.
AndAR
Es un framework que funciona en Android [17]. Se
encuentra bajo la licencia GNU, por lo cual es de
software libre. Permite la superposición de objetos
tridimensionales sobre un marcador convencional
reconocible por el sistema.
A continuación se muestra una comparativa entre los
frameworks que se citaron anteriormente (ver tabla 2). La
tabla indica cuales son las fortalezas y limitantes de cada
uno tomando en cuenta distintos aspectos que influyen en
su funcionalidad y alcances.
Tabla 2. Comparativa de Frameworks de realidad
aumentada.
3.2 Proyectos académicos
El trabajo de López Pombo [18], explica diversas
técnicas de desarrollo de realidad aumentada en equipos
de cómputo, las arquitecturas que se emplearon para cada
una de ellas, así como las situaciones idóneas para
implementarlas. A modo de ejemplo, desarrolla dos
prototipos de sistemas de realidad aumentada para
móviles, utiliza marcadores blanco y negro con formas
rectangulares mediante el desarrollo de algoritmos
específicos que se elaboraron con base al análisis de la
información que se maneja en cada uno de los casos de
estudio.
Domhan [17], muestra el desarrollo del Framework de
realidad aumentada AndAR, utiliza como base
ArtToolkit. Dicho framework permite el uso de
marcadores convencionales. Por último, genera una
aplicación con reconocimiento de marcadores
rectangulares en tonos blanco y negro.
El trabajo de Gaip Weng [19], desarrolla una propuesta
de integración de dos técnicas diferentes de realidad
aumentada, la geolocalización con un algoritmo de
reconocimiento de características de imágenes de nombre
SURF (por las siglas en inglés de Speeded Up Robust
Feature), comparándolas con otras, almacenadas en una
base de datos. Las operaciones las realiza directamente
en el dispositivo móvil iPhone. Mediante el algoritmo de
reconocimiento de imagen, extrae las características
necesarias de la imagen que se capta, las compara con
otras almacenadas en una base de datos local del sistema,
si se encuentra, se procede a la realización de la realidad
aumentada.
El trabajo de Turunen [20], genera una propuesta de
relación entre redes sociales y la realidad aumentada en
dispositivos móviles. El objetivo principal de la
aplicación, es permitir al usuario obtener la ubicación de
los contactos que pertenecen a una red social y los más
cercanos a su posición. Genera una aplicación de prueba
denominada LocTrac. Sin embargo encuentra
inconvenientes con las velocidades de procesamiento y el
posicionamiento del dispositivo.
Aplicación Look! Layar Mixare AndAR
Integración
con cámara
X X X X
2D X X X
3D X X X
Localización
GPS
X X
Marcadores
convencionales
X X X

El trabajo de Santoso [21], muestra el uso de la realidad
aumentada móvil en la enseñanza al generar una
aplicación que se basa en el juego tangram, utiliza las
características ofrecidas por los dispositivos móviles.
Jaegeol Yim en su artículo Implementation of Building
Recognition Android App [22], explica el desarrollo de
una aplicación de reconocimiento de edificios que utiliza
mapas electrónicos. En una base de datos local, se
almacenan los datos de localización de determinados
edificios, mediante el dispositivo móvil se toma una
fotografía del entorno, así mismo se captura la posición
del dispositivo, mediante un algoritmo de reconocimiento
de objetos, se calcula la distancia entre el dispositivo y el
entorno captura, se compara con los datos almacenados
en la base, se obtiene el edificio que se observa y se
muestra un video en la ubicación indicada. La
investigación surge de los errores de posicionamiento
existentes al utilizar la geolocalización en los
dispositivos móviles, se comprueba que a través de este
procedimiento se evitan esos fallos.
El trabajo de Chen Jing, Guo Junwei y Wang Yongtian
[23] muestra un sistema de reconocimiento de imágenes
para un museo mediante realidad aumentada, utilizando
una ultra móvil PC. Se utilizan histogramas HSV (Hue
Saturation Value) para reducir la base de datos de
búsqueda de imágenes y a través de un algoritmo de
aprendizaje supervisado realiza el reconocimiento de la
imagen. Al realizar las pruebas necesarios, tuvieron
aceptación con el uso de la tecnología y el dispositivo,
sin embargo, la velocidad de procesamiento fue lenta.
En el trabajo de Behzadan y Kamat [24], se realiza un
software que se llama UM-AR-GPS-ROVER. Su
enfoque es la generación de objetos a través de realidad
aumentada de utilidad para la construcción. Este software
utiliza un HMD (por las siglas en inglés de head-
mounted display) con un recibidor GPS y seguidor de
orientación, una laptop donde se realizan los
procedimientos y una videocámara. Mediante
posicionamiento GPS y orientación 3 DOF (por las siglas
en inglés de Degrees of Freedom), calcula la posición en
la cual se mostrará el objeto que se aumenta y se calcula
la distancia entre la posición del objeto y la del
dispositivo GPS, con ello, se genera el gráfico con la
posición y tamaño adecuado. A pesar de considerar la
arquitectura del proyecto como móvil, se basa en la
conjunción de diversos dispositivos, ligando a cada uno
una actividad en específico.
El artículo de Jie y Shen [25], muestra el desarrollo de
una aplicación que elimina el problema de la oclusión
(interferencia de objetos) en la realidad aumentada. Su
análisis se basa en la implementación del algoritmo SIFT
(por las siglas en inglés de Scale Invariant Feature
Transformation) y el algoritmo RANSAC (por las siglas
en inglés de RANdom SAmple Conesenus). Utiliza el
contorno de los objetos que interfieren en la muestra de
la imagen aumentada, esta imagen se genera detrás del
objeto que se interpone. En la aplicación no es necesario
el uso de marcadores, por lo que los objetos que se
generan pueden ser móviles o deformables.
David Prochazka [26], realiza una aplicación de realidad
aumentada, la cual se enfoca en el diseño de vehículos, el
usuario carga la imagen de la parte del vehículo que
desea modificar. Utiliza un algoritmo de reconocimiento
de imágenes, implementa redes neuronales, en específico
un perceptrón multicapa, debido a la complejidad de
procesamiento de la red neuronal, esta se implementa en
la nube y se entrena con información que se almacena en
una base de datos remota.
Tabla 3.Comparativa del estado del arte. Artículo Característica
[17] Reconocimiento de marcadores utilizando ArTool
Kit
[18] Análisis de procedimientos de reconocimiento de
imágenes
[19] Implementación del algoritmo SURF y una base de
datos local
[20] Geolocalización y redes sociales
[21] Uso de marcadores rectangulares y en blanco y negro
[22] Mapas electrónicos y algoritmo de reconocimiento
[23] Histogramas HSV y algoritmo de aprendizaje
supervisado
[24] Posicionamiento GPS y orientación 3 DOF
[25] Algoritmo SIFT y RANSAC
[26] Procesamiento y bases de datos en la nube
4. Conclusiones
Las aplicaciones para dispositivos móviles que utilizan
geolocalización utilizan una base de datos con las
características de posicionamiento de los elementos a
aumentar y realizan una comparativa con los datos
obtenidos del dispositivo, esto disminuye los fallos
ocasionados por los cambios de posición del propio
dispositivo.
Una de las técnicas más utilizadas de realidad aumentada
en dispositivos móviles es el uso de códigos QR debido a
que no utiliza procesamiento tan complejo para
desarrollar e incrustar información en él.
Con relación al procesamiento y el almacenamiento de la
información, se realiza en servidores remotos o
procesamiento en la nube para que la aplicación no
utilice los ya escaso recursos del dispositivo.
Se implementan diversos algoritmos de reconocimiento
de imágenes enfocados a disminuir la complejidad del
procesamiento de la información, dependiendo el entorno
analizar.

Con base al análisis que se realizó en el presente artículo,
se propone generar un framework de desarrollo de
realidad aumentada para dispositivos móviles con la
utilización de algoritmos de reconocimiento de imágenes
como SURF y SIFT. Para el almacenamiento de la
información se propone el manejo de bases de datos
locales con claves de latitud y longitud que se obtienen
por medio de geolocalización.
5. Referencias
[1] Arroyo, N. Información en el móvil. 2011. UOC.
Barcelona, España.
[2] Baz Alonso, A; Ferreira Artime, I; Álvarez
Rodriguez, M; García Baniello R. “Dispositivos
móviles”. 2009.
[3] Obando, C. 2010 (26 de agosto de 2013).
http://symbianparamoviles.blogspot.com/
[4] Moreno, F. 2013 (26 de agosto de 2013).
http://blog.techdencias.net/blog/2013/03/17/introdu
ccion-al-desarrollo-de-aplicaciones-en-windows-
phone-8/
[5] Vilchez, A. 2009 (26 de agosto de 2013).
http://www.configurarequipos.com/doc1107.html
[6] Bitelia. 2011 (26 de agosto de 2013).
http://www.poderpda.com/plataformas/apple/ios-
su-nacimiento-desarrollo-e-historia/
[7] Umiastowski, C. 2013 (26 de agosto de 2013).
http://crackberry.com/history-qnx-and-
it%E2%80%99s-implementation-blackberry-10
[8] Abril Redondo, D. “Realidad Aumentada”. 2010.
[9] Sutherland, I. “The ultímate display”. IFIP
Congress. 1965. Pp.506-508.
[10] Milgram, P. y Kishino, F. "Taxonomy of Mixed
Reality Visual Displays". 1994. Pp. 1321-1329.
[11] Azuma, R. “A survey of Augmented Reality”.
Teleoperators and Virtual Environments. 1997. Pp.
355-385.
[12] Brügge, B. “Study on Software Arquitectures for
Augmented Reality Systems”. ARVIKA
consortium. 2002.
[13] Billinghurst, M. “Mobile Collaborative Augmented
Reality”. Recent Trends of Mobile Collaborative
Augmented Reality Systems. 2011. Pp. 1-21.
[14] Layar. 2013 (16 de junio de 2013).
https://www.layar.com/
[15] Mixare. 2013 (16 de junio de 2013).
http://www.mixare.org/
[16] Bellón, S., Creixell, J., y Serrano, A. “Look!
Framework para aplicaciones de realidad
aumentada en Android”. 2010.
[17] Domhan, T. “Augmented Reality on Android
Smartphones”. 2010.
[18] López Pompo, H. “Análisis y Desarrollo de
Sistemas de Realidad Aumentada”. Universidad
Complutense de Madrid. 2009.
[19] Gaip Weng, E. N. “A Framework for Outdoor
Mobile Augmented Reality”. International Journal
of Computer Science Issues, Vol. 9. 2012. Pp. 419-
423.
[20] Turunen, T. “Mobile AR Requirements for Location
Based Social Networks”. The International Journal
of Virtual Reality. 2010. Pp. 67-78.
[21] Santoso, M. “Development of Edutainment Content
for Elementary School using Mobile Augmented
Reality”. 4th International Conference on Computer
Research and Development IPCSIT Vol. 39. 2012.
[22] Yim, J. “Implementation of Building Recognition
Android App”. International Journal of Multimedia
and Ubiquitous Engineering, 7 (2). 2012. Pp. 37-52.
[23] Jing, C.; Junwei, G. y Yongtian, W. “Mobile
Augmnted Reality System for Personal Museum
Tour Guide Applications”. 2011.
[24] Behzadan, A., y Kamat, V. “Georeferenced
Registration of Construction Graphics in Mobile
Outdoor Augmented Reality”. Journal of
Computing in Civil Engineering. 2007. Pp. 247-
258.
[25] Jie, L., y Zheng, X. “Invariant Based Augmented
Reality on Mobile Phones”. Journal of Multimedia.
5 (6). 2010. Pp. 588-595.
[26] Prochazka, D.; Stencl, M.; Popelka, O.; y Stastny, J.
“Mobile Augmented Reality Applications”.
Universidad Mendel, Brno, Rep. Checa. 2011.

Realidad Aumentada
Reconocimiento con marcadores Reconocimiento sin marcadores
Identificación por posicionamiento
Reconocimiento de imágenes
Análisis de la Realidad Aumentada
en Dispositivos Móviles J. Cruz León, J. Rodríguez Flores, J. Martínez Mireles
Laboratorio CA-Cibernética y Cómputo Aplicado, Universidad Politécnica de Pachuca. Zempoala, Hidalgo, México. CP. 42083, Tel. (52)7715477510, e-mail: [email protected]
Dirección de Ingeniería de Software/Laboratorio CA-Cibernética y Cómputo Aplicado, Universidad Politécnica de Pachuca. Zempoala, Hidalgo, México. CP. 42083
Introducción
La realidad aumentada es una tecnología que permite superponer cualquier
tipo de contenido virtual (audio, video, imágenes o texto) sobre el entorno
real, con el objetivo de brindar mayor información de lo que se observa.
Debido a los resultados que se obtienen con ésta tecnología, se desarrollan
aplicaciones que se utilizan en diferentes campos de acción, como en
medicina, arquitectura, diseño, ciencias educativas, entre otras. Sin
embargo, el procesamiento que se requiere para realizar dichas
aplicaciones, dificulta explotarla en los dispositivos móviles, puesto que
cuentan con capacidades limitadas.
Un dispositivo móvil es un aparato portable, con velocidad de
procesamiento y memoria limitadas para ejecutar aplicaciones generales
[1]. Para realizar la interacción entre el dispositivo y el hardware se utiliza el
SO (Sistema Operativo), del cual existen diversas plataformas, donde las
más importantes son: Symbian OS, Windows Phone, Android, iOS y
Blackberry OS. A continuación se mencionan las características principales
de cada uno:
Estado del Arte
Sistema operativo Desarrollador Kernel Lenguaje de
desarrollo
Android Google Linux (maquina virtual Dalvik) JAVA
Blackberry OS RIM QNX JAVA
iOS de iPhone Apple Mac OS X Objetive-C
Windows phone 8 Microsoft Windows NT C#
Symbian OS Nokia EKA 2 C++
Aplicación Look! Layar Mixare AndAR
Integración con cámara X X X X
2D X X X
3D X X X
Localización GPS X X
Marcadores convencionales X X X
Artículo Característica
[4] Reconocimiento de marcadores utilizando ArTool Kit
[5] Análisis de procedimientos de reconocimiento de imágenes
[6] Implementación del algoritmo SURF y una base de datos local
[7] Geolocalización y redes sociales
[8] Uso de marcadores rectangulares y en blanco y negro
[9] Mapas electrónicos y algoritmo de reconocimiento
[10] Histogramas HSV y algoritmo de aprendizaje supervisado
[11] Posicionamiento GPS y orientación 3 DOF
[12] Algoritmo SIFT y RANSAC
[13] Procesamiento y bases de datos en la nube
Conclusiones
Referencias
Tabla 1. Características de sistemas operativos.
Tabla 2. Comparativa de Frameworks de realidad aumentada.
Tabla 3.Enfoque de los trabajos de investigación sobre realidad aumentada.
Realidad mixta
Entorno real Realidad
aumentada
Virtualidad
aumentada Entorno virtual
Fig. 1. Realidad de Milgram-Virtuality Continuum
De acuerdo al proceso de identificación de entorno, la realidad aumentada
puede ser de 2 tipos [3], como se muestra en la siguiente figura.
Realidad Aumentada
En el año de 1994 Paul Milgram y Fumio Kishino [2] proponen una de las
definiciones más aceptadas de la realidad aumentada, donde crean la
realidad de Milgram-Virtuality Continuum, la cual es un entorno que se
observa desde la parte real hasta la parte virtual de modo continuo, donde
la realidad aumentada es la parte más cercana a la realidad, con la
superposición de ciertos aspectos virtuales.
Fig. 3. Tipos de realidad aumentada
Captación del entorno
Identificación del entorno
Aumento de la realidad
Visualización
Fig. 2. Tareas de la realidad aumentada
[1] Baz Alonso, A; Ferreira Artime, I; Álvarez Rodriguez, M; García Baniello R. “Dispositivos móviles”. 2009.
[2] Milgram, P. y Kishino, F. "Taxonomy of Mixed Reality Visual Displays". 1994. Pp. 1321-1329.
[3] Abril Redondo, D. “Realidad Aumentada”. 2010. Reporte técnico.
[4] Domhan, T. “Augmented Reality on Android Smartphones”. 2010. Reporte técnico.
[5] López Pompo, H. “Análisis y Desarrollo de Sistemas de Realidad Aumentada”. Universidad Complutense de
Madrid. 2009. Tesis de maestría.
[6] Gaip Weng, E. N. “A Framework for Outdoor Mobile Augmented Reality”. International Journal of Computer
Science Issues, Vol. 9. 2012. Pp. 419- 423.
[7] Turunen, T. “Mobile AR Requirements for Location Based Social Networks”. The International Journal of Virtual
Reality. 2010. Pp. 67-78.
[8] Santoso, M. “Development of Edutainment Content for Elementary School using Mobile Augmented Reality”.
4th International Conference on Computer Research and Development IPCSIT Vol. 39. 2012.
[9] Yim, J. “Implementation of Building Recognition Android App”. International Journal of Multimedia and
Ubiquitous Engineering, 7 (2). 2012. Pp. 37-52.
[10] Jing, C.; Junwei, G. y Yongtian, W. “Mobile Augmented Reality System for Personal Museum Tour Guide
Applications”. 2011.
[11] Behzadan, A., y Kamat, V. “Georeferenced Registration of Construction Graphics in Mobile Outdoor
Augmented Reality”. Journal of Computing in Civil Engineering. 2007. Pp. 247-258.
[12] Jie, L., y Zheng, X. “Invariant Based Augmented Reality on Mobile Phones”. Journal of Multimedia. 5 (6).
2010. Pp. 588-595.
[13] Prochazka, D.; Stencl, M.; Popelka, O.; y Stastny, J. “Mobile Augmented Reality Applications”. Universidad
Mendel, Brno, Rep. Checa. 2011. Reporte técnico.
Existen cuatro tareas principales que se llevan a cabo al implementar la
realidad aumentada [3]:
Se mencionan los puntos relevantes del análisis que se realizó:
Una de las técnicas que más se utilizan para el desarrollo de realidad
aumentada en dispositivos móviles es el uso de códigos QR.
El procesamiento y almacenamiento de la información se realiza en
servidores remotos o en la nube.
Dentro de los algoritmos que más se utilizan para el reconocimiento de
imágenes están SURF (Speeded Up Robust Feature) y SIFT (Scale
Invariant Feature Transformation).
A continuación se enlistan los frameworks de realidad aumentada que
existen actualmente, así como las investigaciones académicas
relacionadas con el análisis, diseño y desarrollo de la tecnología.
La tabla anterior indica cuales son las fortalezas y limitantes de cada
Framework tomando en cuenta distintos aspectos que influyen en su
funcionalidad y alcances.
Generar realidad aumentada en dispositivos móviles requiere optimizar los
recursos del dispositivo debido a las limitantes de los mismos, por lo que se
sugieren los siguientes aspectos para su desarrollo:
Utilizar geo localización para disminuir las consultas de búsqueda en las
bases de datos de las aplicaciones.
Utilizar algoritmos que disminuyan la complejidad del procesamiento en
el dispositivo, como son: SURF y SIFT.