Algorithme distribué pour l'assignation de rôles dans Molecular MAC, une couche MAC multicanal

CENTRO DE INVESTIGACIÓN CIENTÍFICA Y DE EDUCACIÓNSUPERIOR DE ENSENADA
DIVISIÓN DE FÍSICA APLICADA
DEPARTAMENTO DE CIENCIAS DE LA COMPUTACIÓN
APLICACIÓN DE DETECTORES MULTICANAL GABOR PARAENCONTRAR CORRESPONDENCIAS ENTRE IMÁGENES DE
TEXTURAS DE SEDIMENTOS LAMINADOS
TESIS
que para cubrir parcialmente los requisitos necesarios para obtener el gradode MAESTRO EN CIENCIAS en CIENCIAS DE LA COMPUTACIÓN
presenta:
JOSÉ ADRIÁN MUNGUÍA RIVERA
Ensenada, Baja California, México. Diciembre 2003

TESIS DEFENDIDA POR
José Adrián Munguía Rivera
Y APROBADA POR EL SIGUIENTE COMITÉ
Dr. Hugo H. Hidalgo Silva
Director del Comité
________________________
M.C. Jorge Torres Rodríguez
Miembro del Comité
__________________________
M.C. Vicente Ferreira Bartrina
Miembro del Comité
_________________________
Dr. Jesús Favela Vara
Jefe del Departamento de
Ciencias de la Computación
___________________________
Dr. Luis Alberto Delgado Argote
Director de Estudios de Posgrado
11 de diciembre del 2003
RESUMEN de la Tesis de José Adrián Munguía Rivera presentada como requisito parcialpara la obtención del grado deMAESTRO EN CIENCIAS enCIENCIAS DE LA COM-PUTACIÓN . Ensenada, Baja California, México. Diciembre 2003.
APLICACIÓN DE DETECTORES MULTICANAL GABOR PARA ENCONTRARCORRESPONDENCIAS ENTRE IMÁGENES DE TEXTURAS DE SEDIMENTOS
LAMINADOS
Resumen aprobado por: ________________________
Dr. Hugo H. Hidalgo Silva
Director de Tesis
En este trabajo presentamos un método y su implementación para encontrar la correspon-dencia entre imagenes de texturas en general así como en el caso particular de imágenesde sedimentos laminados. El método propuesto se basa en un detector multicanal Gabor, latransformada de Karhunen-Loève, y la representación de lascaracterísticas de las texturascomo cúmulos de puntos en un espacio multivariado. La representación de las característicasde las texturas como cúmulos de puntos da pie a poder medir cuan discímiles son por mediodel cálculo de la distancia de Penrose. El sistema fue implementado totalmente en Java y seencuentra disponible en: http://www.AnalisisDeTexturas.net.
Palabras claves: Gabor, textura, sedimentos laminados.

ABSTRACT of the Thesis submitted by José Adrián Munguía Rivera as a partial fulfill-ment of the requirements to obtain theMASTER OF SCIENCE degree inCOMPUTERSCIENCE. Ensenada, Baja California, México. December 2003.
MULTICHANNEL GABOR DETECTORS FOR LAMINATED SEDIMENTTEXTURE IMAGE MATCHING
Abstract approved by: ________________________
Dr. Hugo H. Hidalgo Silva
Thesis Advisor
In this work we present a method and its implementation to solve the general problem oftexture matching as well as for the particular case of imagesof laminated sediments. Themethod we present is based on multichannel Gabor detectors,the Karhunen-Loève trans-form, and the presentation of our texture features as clusters of points in a multi-dimensionalspace. The representation of texture features as clusters of points allows the possibility tomeasure the amount of similarity between them by means of thePenrose distance measure.The software was implemented in Java and is available at: http://www.TextureAnalysis.net.
Keywords: Gabor, texture, laminated sediments.

DEDICATORIA

AGRADECIMIENTOS

Contenido
1. Introducción 11.1. Definición de textura . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 21.2. Aplicaciones del análisis de texturas . . . . . . . . . . . . . .. . . . . . . . 3
1.2.1. Imágenes médicas . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1.1. Detección de cáncer mamario . . . . . . . . . . . . . . . . 41.2.1.2. Detección de padecimientos pulmonares . . . . . . . . .. 6
1.2.1.3. Detección de melanomas . . . . . . . . . . . . . . . . . . 61.2.2. Percepción remota . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.3. Procesamiento de documentos . . . . . . . . . . . . . . . . . . . .. 71.2.4. Sedimentos laminados . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.4.1. Construcción de series de tiempo . . . . . . . . . . . . . . 12
1.3. Finalidad del trabajo . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 17
2. Características de texturas 192.1. Tipos de características . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 20
2.1.1. Métodos estadísticos . . . . . . . . . . . . . . . . . . . . . . . . . .212.1.1.1. Momentos . . . . . . . . . . . . . . . . . . . . . . . . . . 212.1.1.2. Matrices de co-ocurrencia . . . . . . . . . . . . . . . . . . 22
2.1.2. Métodos geométricos . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.1.2.1. Telaraña de Voronoi . . . . . . . . . . . . . . . . . . . . . 252.1.2.2. Métodos estructurales . . . . . . . . . . . . . . . . . . . . 26
2.1.3. Métodos basados en modelos . . . . . . . . . . . . . . . . . . . . . .282.1.3.1. Modelo autorregresivo . . . . . . . . . . . . . . . . . . . . 29
2.1.3.2. Campos aleatorios Markovianos . . . . . . . . . . . . . . 29
2.1.4. Métodos basados en procesamiento de señales . . . . . . .. . . . . 32
2.1.4.1. Métodos espectrales . . . . . . . . . . . . . . . . . . . . . 32

2.1.4.2. Transformada de coseno discreto . . . . . . . . . . . . . . 322.1.5. Filtros Gabor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.1.5.1. Base biológica . . . . . . . . . . . . . . . . . . . . . . . . 34
2.1.5.2. Descripción matemática . . . . . . . . . . . . . . . . . . . 35
2.1.5.3. Definición de filtros Gabor . . . . . . . . . . . . . . . . . 362.1.5.4. Principio de incertidumbre de Heisenberg . . . . . . .. . 37
2.1.5.5. Función Gabor compleja . . . . . . . . . . . . . . . . . . 39
2.1.5.5.1. Función Gabor compleja unidimensional . . . . . 39
2.1.5.5.2. Función Gabor compleja n-dimensional . . . . . 41
2.1.5.5.3. Función Gabor compleja bidimensional . . . . . 42
2.1.5.5.4. Función Gabor real . . . . . . . . . . . . . . . . 43
3. Detectores multicanal 453.1. Función Gabor real en múltiples escalas y múltiples direcciones . . . . . . . 46
3.1.1. Esquemas anteriores . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.1.1.1. Esquema de Randen y Husoy . . . . . . . . . . . . . . . . 48
3.1.1.1.1. Etapa de Filtrado . . . . . . . . . . . . . . . . . 49
3.1.1.1.2. Etapa de función de energía local . . . . . . . . . 49
3.1.1.1.3. Operadores no lineales . . . . . . . . . . . . . . 50
3.1.1.1.4. Filtro suavizante . . . . . . . . . . . . . . . . . . 523.1.1.1.5. No linealidad normalizante . . . . . . . . . . . . 53
3.1.1.2. Esquema de Weldon y Higgins . . . . . . . . . . . . . . . 53
3.1.2. Configuración de filtros . . . . . . . . . . . . . . . . . . . . . . . . 54
3.1.3. Análisis de componentes principales . . . . . . . . . . . . .. . . . . 57
3.1.4. Medición de distancias multivariadas . . . . . . . . . . . .. . . . . 583.1.4.1. Distancias entre observaciones individuales . . .. . . . . 59
3.1.4.1.1. Distancia Euclidiana . . . . . . . . . . . . . . . 593.1.4.2. Distancias entre poblaciones y muestras . . . . . . . .. . 60
3.1.4.2.1. Distancia de Penrose . . . . . . . . . . . . . . . 603.1.4.2.2. Distancia de Mahalanobis . . . . . . . . . . . . 60
3.2. Esquema propuesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
3.2.1. Filtrado Gabor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.2.2. No linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.2.3. Función suavizante . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

3.2.4. Transformada de Karhunen Loève . . . . . . . . . . . . . . . . . .. 663.2.4.1. Vector de observaciones . . . . . . . . . . . . . . . . . . . 663.2.4.2. Matriz de observaciones . . . . . . . . . . . . . . . . . . . 67
3.2.5. Cálculo de correspondencias entre características. . . . . . . . . . . 68
3.3. Identificación de estructuras sedimentarias contiguas . . . . . . . . . . . . . 70
4. Experimentación 75
4.1. Configuración del sistema para pruebas . . . . . . . . . . . . . .. . . . . . 76
4.2. Aplicación del método a imágenes compuestas de dos texturas . . . . . . . . 77
4.2.1. Experimento 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.2.2. Experimento 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2.3. Experimento 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.4. Experimento 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.3. Experimentos con imágenes Brodatz . . . . . . . . . . . . . . . . .. . . . . 85
4.3.1. Experimento 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.3.2. Experimento 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.3.3. Experimento 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.4. Experimentos con imágenes de sedimentos laminados . . .. . . . . . . . . . 95
4.4.1. Experimento 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.4.2. Experimento 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.4.3. Experimento 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5. Conclusiones y contribuciones 105
Bibliografía 106

Índice de figuras
1. Ejemplos de imágenes de superficies con textura. (a) Imagen de una huelladactilar, (b) textura D4 Brodatz, (c) textura D3 Brodatz, (d) imagen del ojohumano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. (a) Mamograma que muestra una masa sólida irregular con calcificaciones,(b) un quiste dividido por un septum y (c) tejido mamario altamente texturizado. 5
3. (a) Imagen del glaciar Malaspina en Alaska, (b) estante dehielo de AlfredErnest en la isla de Ellesmere en Canada y (d) un remolino grande en elocéano en el estrecho de Shelikof en Alaska. . . . . . . . . . . . . . .. . . . 7
4. Cuenca de Santa Barbara en la actualidad. . . . . . . . . . . . . . .. . . . . 115. Vecindad alrededor de algún punto que se desea anclar. La comparación se
realiza visualmente, o en su defecto, calculando la correlación lineal entrelos valores que se extraen de una columna de cada una de las imágenes. Unacolumna de las cuales se puede extraer valores para compararlos con los deotra imagen se muestra como una franja clara vertical en la imagen. . . . . . 15
6. Secuencia de valores correspondientes a una franja vertical de dos imágenesdistintas de sedimentos laminados. . . . . . . . . . . . . . . . . . . . .. . . 16
7. Imágenes de sedimentos laminados. Texturas formada por sedimentos lami-nados. Nótese que aunque se trata de imágenes de sedimentos distintos, ex-hiben texturas muy semejantes. . . . . . . . . . . . . . . . . . . . . . . . .. 18
8. Una primitiva de textura cuyo símbolo esa (a). Otra primitiva de textura, susímbolo esS (b). Patrón que resulta de realizar la derivaciónS ! aS (c).Patrón que resulta de realizar la derivaciónS ! aS ! aaS . . . . . . . . . . 27
9. Textura generada por el patrónaaab baa . . . . . . . . . . . . . . . . . . . 28
10. Vecindades de un MRF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3011. función Gabor unidimensional en el dominio espacial conparámetrosw =
0;9 y � = 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
12. Función Gabor unidimensional en el dominio de frecuencias con parámetrosw = 15 y � = 0;06. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
13. Función Gabor real bidimensional en el dominio espacial. . . . . . . . . . . . 44

14. Representación en el dominio de frecuencias de 16 filtrosGabor en escalalog-polar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
15. Mapas de intensidad de funciones Gabor en el dominio espacial sintonizadasa cuatro orientaciones (0Æ, 45Æ, 90Æ, 135Æ) y a cuatro frecuencias (0.015, 0.03,0.06, 0.12). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
16. Esquema multicanal propuesto por Randen y Husøy. . . . . . .. . . . . . . 49
17. Función sigmoidetanh(�x) con distintos valores de saturación. (a)� = 1
(b) � = 0;25 (c) � = 0;1 (d) � = 0;05 . . . . . . . . . . . . . . . . . . . . . 51
18. Aplicación de filtros Gaussianos para la eliminación de altas frecuencias, (a)imagen original, (b) parámetro� = 2, (c) con parámetro� = 4, (d)� = 8. . . 53
19. Esquema para clasificar/segmentar imágenes de texturaspropuesto por Wel-don y Higgins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
20. Esta figura muestra una imagen que consta de dos texturas compuesta por dos¨texeles¨ distintos,t
1
a la izquierda yt2
a la derecha y algunos parámetros quedeben ser determinados para configurar al filtro Gabor que lasdiscrimine. . . 55
21. Esquema propuesto para la extracción de características de cada una de lastexturas a procesar por el sistema. . . . . . . . . . . . . . . . . . . . . .. . 63
22. Obtención del vector de observacionesX
(x;y)
a partir de lasd imágenes desalida del detector multicanal . . . . . . . . . . . . . . . . . . . . . . . .. . 67
23. Esquema general del sistema para encontrar correspondencias entre texturas . 70
24. Tipos de contiguidad que existe entre imágenes de texturas de sedimentoslaminados.(a) muestra dos imagenes de sedimentos laminados distinos. (b)muestra dos imágenes de sedimentos laminados que corresponden a la mismatextura pero no empatan sus extremos. En (c) las imagenes corresponden (ocasi corresponden) a la misma textura y empatan sus extremos. . . . . . . . 72
25. aplicación de un canal del banco de filtros Gabor. No existe discontinuidadentre texturas, por lo que las dos estructuras sedimentarias son contiguas. . . 74
26. aplicación de un canal del banco de filtros Gabor a dos estructuras sedimenta-rias identicas desfazadas. Existe una discontinuidad (salto) en la imagen queresulta de aplicar el filtro Gabor y el suavizado. . . . . . . . . . .. . . . . . 74
27. Imagen de prueba construida por dos texturas. . . . . . . . . .. . . . . . . . 78
28. Imagen resultado de aplicar un canal del método propuesto para discernirentre dos texturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
29. Gráfica de los valores de los pixeles de la imagen original(a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores delos pixeles de la imagen después de aplicar a (b) el operador(�)
2(c). Resultadode aplicarle a (c) un filtro suavizante Gaussiano (d). . . . . . .. . . . . . . . 79
30. Imagen de prueba construida por dos imágenes de texturasBrodatz: D6 en elfondo y D17 en el centro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80

31. Imagen resultado de aplicar un canal del método propuesto para ldiscernirentre dos texturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
32. Gráfica de los valores de los pixeles de la imagen original(a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores delos pixeles de la imagen despues de aplicar a (b) el operador(�)
2(c). Resultadode aplicarle a (c) un filtro suavizante Gaussiano (d). . . . . . .. . . . . . . . 81
33. Imagen de prueba construida por dos imágenes de texturasBrodatz: D5 a laizquierda y D92 a la derecha . . . . . . . . . . . . . . . . . . . . . . . . . . 82
34. Imagen resultado de aplicar un canal del método propuesto para discernirentre dos texturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
35. Gráfica de los valores de los pixeles de la imagen original(a). Valores delos pixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valoresde los pixeles de la imagen después de aplicarle a (b) el operador (�)2(c).Resultado de aplicarle a (c) un filtro suavizante Gaussiano (d). . . . . . . . . 83
36. Imagen de prueba compuesta por dos texturas de sedimentos laminados. . . . 84
37. Imagen resultado de aplicar un canal del método propuesto para discernirentre dos texturas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
38. Gráfica de los valores de los pixeles de la imagen original(a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores delos pixeles de la imagen después de aplicar a (b) el operador(�)
2(c). Resultadode aplicarle a (c) un filtro suavizante Gaussiano (d). . . . . . .. . . . . . . . 85
39. Imágenes de texturas Brodatz utilizadas en las evaluaciones del sistema. . . . 86
40. Imágenes perturbadas de prueba Brodatz. A la imagen D94 se le añadió rui-do Gaussiano con� = 10 (D94r1), � = 20 (D94r2) y � = 30 (D94r3),respectivamente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
41. Correspondencias para la textura D1 calculadas por medio de las distancias:(a) Mahalanobis sin TKL y (b) Mahalanobis con TKL. . . . . . . . . .. . . 88
42. Correspondencias para la textura D1 calculadas por medio de las distancias:(a) Euclidiana sin TKL y (b) Euclidiana con TKL. . . . . . . . . . . .. . . . 89
43. Correspondencias para la textura D1 calculadas por medio de las distancias:(a) Penrose sin TKL y (b) Penrose con TKL. . . . . . . . . . . . . . . . . .. 90
44. Correspondencia calculada (a) para la imagen D2 y la imagen (b) D35. . . . . 92
45. (a) Correspondencia entre la imagen D5 y varias texturasBrodatz. (b) Corre-spondencia entre D94 y texturas D94 de Brodatz con varios niveles de ruidoGaussiano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
46. Imágenes de prueba de sedimentos laminados . . . . . . . . . . .. . . . . . 96
47. Imágenes perturbadas de prueba de sedimentos laminados. A la imagen S14se le añadió ruido Gaussiano con� = 10 (S14r1),� = 20 (S14r2b) y� = 30
(S14r3), respectivamente. . . . . . . . . . . . . . . . . . . . . . . . . . . .. 97

48. (a)Correspondencia calculada entre la textura S5pert yotras texturas de sed-imentos laminados. (b) Correspondencia calculada entre laimagen de sedi-mentos laminados S14 y S14 con varios niveles de ruido. . . . . .. . . . . . 98
49. (a)Correspondencia calculada entre la textura S1 y otras texturas de sedimen-tos laminados. (b) Correspondencia calculada entre la imagen S16 y otrossedimentos laminados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
50. Imágenes distintas de sedimentos laminados pertenecietes a un mismo sitio.La imagen (a) servirá para anclar dos puntos de la imagen (b).. . . . . . . . 102
51. Imágenes seccionadas en 7 renglones y 5 columnas, respectivamente. Estasimágenes sirven como base para realizar búsquedas de correspondencias en-tre las secuencias sedimentarias. . . . . . . . . . . . . . . . . . . . . .. . . 103
52. Correspondencias calculadas entre las texturas contenidas en el tercer renglónde la imagen de la figura 51 (a) y aquellas contenidas en la imagen de la figura51 (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
53. Correspondencias calculadas entre las texturas contenidas en el quinto renglónde la imagen de la figura 51 (a) y aquellas contenidas en la imagen de la figura51 (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104

Lista de tablas
I. Descriptores de características a partir de una matriz de co-ocurrencia . . . . 24
II . Características de texturas a partir de telarañas de Voronoi . . . . . . . . . . 27
III . Criterios para elegir los parámetros de un filtro Gabor paradiscriminar dostexturas en una misma imagen. . . . . . . . . . . . . . . . . . . . . . . . . . 56
IV . Formato de una matriz de observaciones . . . . . . . . . . . . . . . . .. . . 67
V. Configuración básica del detector multicanal propuesto para discriminar tex-turas Brodatz y de sedimentos laminados . . . . . . . . . . . . . . . . .. . 77

Capítulo 1
Introducción
La visión por computadora surge como una rama de las cienciascomputacionales y la inge-
niería electrónica en los años 1960s. Desde entonces, existen dos motivaciones principales
para los investigadores en esta área: el desarrollo de algoritmos para resolver problemas de
visión por computadora y entender cómo modelar el sistema devisión humana (Bowyer y
Phillips, 1998).
El propósito de un sistema de visión por computadora es el extraer información acerca del
ambiente a partir de una imagen o de una secuencia de imágenes. La información obtenida
del sistema de visión debe ser útil para la ejecución de alguna tarea o de algún conjunto de
tareas en particular. La mejor medida del éxito o fracaso de un sistema de visión es la utilidad
de la información que provee (Chaney, 1993).
La mayor parte de las superficies de objetos naturales exhiben una cualidad muy importante
que puede ser causada por su rugosidad u orientación de filamentos que la componen. Mien-
tras que estas cualidades pueden ser percibidas por el tacto, también existen los casos en que

2
estas cualidades las generan diferencias de reflexión debido a sus colores. A esta cualidad
le llamamos textura. Uno de los problemas con el cual tienen que tratar muchos sistemas de
visión es la textura del mundo que nos rodea.
1.1. Definición de textura
La gran complejidad del estudio de este tema comienza por su definición. Existen muchas
definiciones para este término, cada quien la define dependiendo del contexto en que se tra-
baje. En el idioma español (Real Academia Española, 2001), textura es la disposición de las
partes de un cuerpo. Coggins (Coggins, 1982) ha recopilado una gran cantidad de definiciones
de literatura de visión por computadora. Algunos ejemplos son:
“Podemos considerar a la textura como aquello que constituye una región macroscópi-
ca. Su estructura es simplemente atribuida a los patrones repetitivos en los cuales ele-
mentos o primitivas se encuentran ordenadas de acuerdo a unaregla de acomodo.”
“Una región dentro de una imagen posee textura constante si un conjunto de estadísticas
locales u otras propiedades locales de la imagen son constantes, varían lentamente, o
son aproximadamente periódicas.”
Por otra parte, Dunn y colaboradores (Dunnet al., 1994) consideran que la mayor parte de
las texturas pueden ser descritas por un conjunto de objetosprimitivos similares, pero no
necesariamente idénticos, ordenados de forma repetitiva.A cada uno de estos elementos lo
llamantexel.

3
Algunos ejemplos de texturas se observan en la figura 1.
(a) (b)
(c) (d)
Figura 1: Ejemplos de imágenes de superficies con textura. (a) Imagen de una huella dactilar,(b) textura D4 Brodatz, (c) textura D3 Brodatz, (d) imagen del ojo humano.
1.2. Aplicaciones del análisis de texturas
La clasificación y segmentación de texturas a partir de imágenes digitales ha recibido gran
atención en las últimas décadas (Randen y Husøy, 1999). Estaatención, primordialmente es
debida a la gran cantidad de aplicaciones que se le daría a un sistema que satisfactoriamente
clasificara o segmentara texturas. La discriminación de texturas es la parte básica para muchas
aplicaciones en problemas de visión por computadora (Azencott et al., 1997), por lo que
la parte esencial del análisis de texturas (clasificación, segmentación, etc.) se encuentra en
diseñar un método que logre detectar diferencias entre una textura y otra.

4
Métodos para el análisis de texturas han sido utilizados en varios dominios de aplicación.
Existen algunas áreas, como en la percepción remota, en que este análisis ya se ha utiliza-
do, mientras en otras áreas, como en la inspección de superficies, nuevas aplicaciones estan
siendo encontradas.
Algunos de los campos de aplicación primordiales del análisis de texturas son en imágenes
médicas, percepción remota, procesamiento de documentos,búsqueda de imágenes basada en
contenido, reconstrucción de formas tridimensionales a partir de imágenes bidimensionales,
análisis de texturas de dimensión arbitraria, síntesis de texturas, esta generalmente utilizada
para la compresión de imágenes (Tamuraet al., 1978), y para el sistema de visión de robots.
1.2.1. Imágenes médicas
Las imágenes en medicina son obtenidas mediante métodos no invasivos como los rayos-
X, fotografías, ultrasonido y tomografías, así como por medio de métodos invasivos como
fotografías microscópicas de biopsias.
En medicina, el análisis de texturas juega un papel importante en el diagnóstico de algunas
enfermedades. Ciertas enfermedades pulmonares, condiciones cardiacas, abscesos, cánceres,
y otras condiciones pueden ser detectadas y clasificadas pormedio del estudio de texturas
presentes en imágenes médicas (Sutton y Hall, 1972).
1.2.1.1. Detección de cáncer mamario
El cáncer mamario es la segunda causa de muerte en las mujeresdespués del cáncer pul-
monar en Estados Unidos de América. Se estima que en el año 2003 la cantidad de mujeres

5
que desarrollarán este cáncer será de 211,300 y 39,800 morirán por consecuencia, según la
American Cancer Society (Cancer Facts and Figures, 2003). El diagnóstico temprano de este
cáncer es la forma más efectiva para reducir el índice de mortalidad dado.
Es conocido que la formación de cúmulos de microcalcificaciones es una de las primeras
señales de cambios potencialmente cancerosos en el tejido mamario. Existen problemas al
tratar a las imágenes de mamogramas con técnicas tradicionales de segmentación y de de-
tección de bordes (Gulsrud y Husøy, 2000). Esto se debe a que las microcalcificaciones fre-
cuentemente no poseen contornos bien definidos y a su vez pueden encontrarse incrustadas
entre tejido altamente texturizado. Imágenes médicas de las glándulas mamarias se muestran
en la figura 2.Basados en el hecho de que el tejido de las glándulas mamarias es altamente tex-
turizado podemos plantear que estas imágenes deben ser tratadas por métodos para el análisis
de texturas (Gulsrud y Løland, 1996).
(a) (b) (c)
Figura 2: (a) Mamograma que muestra una masa sólida irregular con calcificaciones, (b) unquiste dividido por un septum y (c) tejido mamario altamentetexturizado.

6
1.2.1.2. Detección de padecimientos pulmonares
La fibrosis pulmonar intersticial causa la cicatrización o engrosamiento de los tejidos pul-
monares profundos sin una causa conocida; de tal forma que sepresentan cambios en la
textura de las imágenes de radiografías (Tuceryan y Jain, 1998).
1.2.1.3. Detección de melanomas
La mayor causa de muertes por cáncer en la piel se debe al melanoma maligno cutáneo,
cuya incidencia se ha incrementado rápidamente en las últimas décadas. Los melanomas
son un tipo de tumores malignos en la piel. Estos son generalmente descritos como lesiones
sobre la piel que poseen cambios de colores. Además, sus bordes tienden a ser irregulares y
asimétricos con indentaciones.
1.2.2. Percepción remota
La percepción remota consiste en la interpretación de mediciones de la energía electromag-
nética que es reflejada o emitida por un punto distante al objetivo. En particular, el estudio
del planeta Tierra por medio de la percepción remota es la interpretación y entendimiento de
mediciones de la energía electromagnética que es reflejada oemitida por la superficie de la
tierra o su atmósfera, y el establecer relaciones entre ellas (Mather, 1999).

7
(a) (b) (c)
Figura 3: (a) Imagen del glaciar Malaspina en Alaska, (b) estante de hielo de Alfred Ernesten la isla de Ellesmere en Canada y (d) un remolino grande en elocéano en el estrecho deShelikof en Alaska.
El análisis de texturas ha sido extensamente utilizado parala clasificación de imágenes de
percepción remota. La clasificación del uso de suelo, donde regiones heterogéneas, com-
puestas por distintos tipos de terrenos (trigo, cuerpos de agua, regiones urbanas, etc.) deben
ser identificadas, es una aplicación importante (Tuceryan yJain, 1998). Algunos ejemplos de
imágenes utilizadas en la percepción remota se muestran en la figura 3.
1.2.3. Procesamiento de documentos
Al observar a distancia documentos impresos, el ojo percibelas regiones que contienen texto
como poseedora de texturas distintas a las que poseen gráficos. El poder segmentar y distin-
guir las partes de los documentos que contienen texto y las que no lo contienen es de gran
importancia para el reconocimiento óptico de caracteres endocumentos digitalizados, como
periódicos. Jainet al. (1992) trata este problema haciendo uso de técnicas para el análisis de
texturas, de igual manera trata el problema de localizaciónde códigos de barras a partir de
imágenes.

8
El procesamiento de documentos puede aplicarse para resolver problemas como el reconocer
áreas que contienen códigos postales y domicilios en objetos enviados por medio del sistema
de correo (Tuceryan y Jain, 1998) así como para el análisis e interpretación de mapas.
1.2.4. Sedimentos laminados
Una característica de las rocas sedimentarias es la estratificación. La estratificación es oca-
sionada por varios procesos periódicos y episódicos así como sobreimpresiones a causa de
procesos biológicos y diagenéticos (Schaaf, 1995). La diagénesis es el conjunto de proce-
sos químicos y físicos dentro de sedimentos depositados durante su conversión a roca. Estas
cualidades sedimentarias pueden representar secuencias tanto en escala global como local. Se
considera usualmente una secuencia de láminas como un ciclo, sin embargo, el término ciclo
sedimentario se utiliza sólo como un término práctico para describir sucesiones repetitivas de
ciertos tipos litológicos.
Cualquier secuencia sedimentaria es consecuencia de procesos autogenéticos o de procesos
alogenéticos. Los procesos autogenéticos son aquellos quesuceden dentro de los sedimentos
mismos (o de la cuenca que los contiene), por ejemplo: depósitos de turbidita. Los procesos
alogenéticos suceden fuera de los sedimentos (dentro de la columna de agua o fuera del
agua). Un tipo de proceso alogenético es el cambio de la composición de los sedimentos
como consecuencia de cambios en el clima (Schaaf, 1995).
Los procesos alogenéticos son los más importantes para investigar cambios y patrones ocea-
nográficos y climatológicos del pasado así como la relación que existe entre el clima y la
composición de los sedimentos. Esta relación entre el climay la composición de los sedi-

9
mentos da la posibilidad a investigadores de establecer conclusiones acerca de la variabilidad
del clima en el pasado a partir de estudios de series de tiempode la composición sedimentaria
de regiones climatológicamente importantes y sensibles.
Los sedimentos laminados obtenidos del fondo de lagos y mares actúan como un expediente
detallado de las condiciones climatológicas y biológicas abarcando hasta miles de años. El
uso de sedimentos laminados nos brinda una herramienta importante para realizar el análisis
de las poblaciones dado que las fluctuaciones de estas varíanen escalas de tiempo extensas
(varias décadas o más) (Baumgartneret al., 1992).
Analizando la composición de sedimentos laminados obtenidos de la cuenca de Santa Bar-
bara, al sur de California, Baumgartneret al. (1992) generó una serie de tiempo de las tasas
de depositación de escamas de la sardina del Pacífico y de la anchoveta norteña. Esto con
fines de estimar las fluctuaciones periódicas de losstocksde sardinas y anchovetas de los
últimos casi 2000 años (desde 300 D.C. hasta 1970). Estudiosde este tipo se han llevado a
cabo en el pasado por Soutar e Isaacs (1969) en los cuales se realizó un análisis de muestras
de sedimentos laminados que abarcan más de 2000 años de historia. Los estudios de Soutar
fueron realizados sobre sedimentos adquiridos por un nucleador de pistón de la cuenca de
Santa Barbara. Posteriormente se consideraron series más cortas que abarcan los 160 años
desde 1810 D.C. hasta 1970 (Soutar e Isaacs, 1974). Estos datos formaron la primera serie
continua de tiempo de peces fósiles y mostró la variabilidadde tamaños de poblaciones sobre
periodos significativamente mayores a un siglo (Baumgartner et al., 1992).
Una conclusión del estudio que realizaron Baumgartneret al. (1992), en el cual se comple-
mentaron los datos de Soutar al utilizar datos de un núcleo depistón adicional, es que tanto
la población de la sardina del Pacífico como la de la anchovetanorteña ha sufrido grandes

10
fluctuaciones naturales claramente no ocasionadas por la pesca. Se han construido secuencias
de tasas de depositación de escamas a partir de sedimentos del margen de Benguela (costa
Oeste de África) y de Perú, pero la falta de secuencias de sedimentos laminados anualmente
depositados, también llamadas varvas, bien preservadas haobstaculizado la construcción de
series de tiempo que igualen en calidad a aquellas construidas a partir de las muestras de la
cuenca de Santa Barbara. Otra virtud de los sedimentos laminados provenientes de la cuenca
de Santa Barbara es que estos comenzaron a depositarse hace aproximadamente 8000 años y
han aportado secuencias más detalladas para la reconstrucción de la historia paleoecológica
y climatológica que los de otros sitios.
El este del Océano Pacífico es una de las regiones más sensibles a cambios climatológicos del
mundo. Sus aguas se caracterizan por poseer una surgencia costera persistente. La surgencia
costera es un proceso mediante el cual aguas frías, a menudo abundantes en nutrientes, se
elevan hacia la superficie desde la profundidad del océano. Esta surgencia costera ocasiona
una alta bioproductividad en las aguas cercanas a la superficie que a su vez ayuda a mantener
a una rica comunidad de vida marina y terrestre. El hundimiento y el decaimiento de materia
orgánica dentro de la columna de agua causa un agotamiento deoxígeno en aguas interme-
dias (100m a 1000m de profundidad). En el lugar donde las aguas intermedias intersectan la
interfaz sedimento/agua, los sedimentos son depositados bajo condiciones anóxicas, lo cual
permite la conservación de la estructura sedimentaria en forma de varvas anuales. Existen dos
umbrales que conectan a la cuenca de Santa Barbara al Océano Pacífico, uno a 450m de pro-
fundidad y el otro a 250m de profundidad. A profundidades mayores que las de los umbrales,
las aguas de la cuenca se agotan de oxígeno . Una capa densa de bacterias en el fondo de la
cuenca asiste en la estabilización de los sedimentos sobre la superficie. El bajo contenido de

11
oxígeno y la presencia de sulfuro de hidrógeno son causantesde la ausencia de organismos
bénticos que se entierran, permitiendo así, la conservación de láminas estacionales. La forma
de la cuenca de Santa Barbara se muestra en la figura 4.
Zona anearóbica
Zona de alta productividad
Aguas transicionales
Aguas intermedias Umbral a 450 m
Umbral a 250 m
Figura 4: Cuenca de Santa Barbara en la actualidad.
El régimen de surgencia costera reacciona de manera muy sensible a cambios de clima region-
al o global con cambios en la fuerza y ubicación. La alta tasa de sedimentación de hasta 2mm
por año y la composición particular de los sedimentos hacen dichos cambios climatológicos
discernibles directamente en los sedimentos. En particular, el este del Océano Pacífico es un
sitio ideal para el estudio de la variabilidad climatológica de los últimos 160,000 años.
En las últimas décadas se han realizado cientos de estudios sobre las cuencas y cuestas del
Pacífico Este para comprender el sistema climatológico regional y global. Las limitaciones
tecnológicas son el problema con el que se han topado la mayoría de los investigadores en
este campo (Schaaf, 1995).

12
1.2.4.1. Construcción de series de tiempo
El principio fundamental para la reconstrucción de series de tiempo a partir de sedimen-
tos laminados es que a la columna de sedimentos le corresponde una cronología. Los pares
de laminas claro-oscuro corresponden a varvas anualmente depositadas (Baumgartneret al.,
1992). Para la reconstrucción del ambiente a partir de sedimentos es necesario obtener carac-
terísticas que fueron producidas en la época de depositación. Muchas características que se
observan en sedimentos laminados son el resultado de procesos de compactación, diagénesis
y metamorfosis. Por lo tanto es necesario poder discernir entre características primarias pro-
ducidas durante la depositación y características secundarias producidas posteriormente a la
época de depositación (Reineck y Singh, 1981).
La manera en que se capturan las imágenes de sedimentos laminados es de suma importancia.
La mayoría de las capas gruesas de lodo (>1cm), las cuales a primera vista aparentan ser
burdas y sin laminaciones internas son, frecuentemente, finamente laminadas en su interior.
Las laminaciones internas de este tipo de muestras de lodo seestudian adecuadamente en
secciones delgadas o con la ayuda de rayos-X (Reineck y Singh, 1981).
Como resultado de las actividades de organismos bénticos los sedimentos sufren perturba-
ciones, esto es, las capas son deformadas o interrumpidas y desplazadas (Reineck y Singh,
1981). Aun cuando la preservación de varvas como las de sedimentos obtenidos de la cuen-
ca de Santa Barbara es casi perfecta para los últimos 2000 años, episodios de bioturbación
han interrumpido la secuencia de láminas en grados que van desde insignificante hasta lograr
borrar completamente la estructura laminada de los sedimentos. Al extender la cronología
anual a través de estos intervalos (al interpolar las tasas de sedimentación) nos afecta una in-

13
certidumbre inherente proporcional al grosor del intervalo, el cual se acumula como vayamos
encontrando nuevos problemas de bioturbación (Baumgartner et al., 1992).
Para superar problemas de incertidumbre en secuencias de varvas perturbadas es posible com-
plementar la secuencia por medio del uso de otros datos. La incertidumbre cronológica en
secuencias de varvas de la cuenca de Santa Barbara puede ser reducida al realizar una corre-
lación cruzada entre secuencias de grosores de varvas y grosores de los anillos de árboles,
ya que existe una relación entre estos valores y la cantidad de lluvia en el sur de California.
De igual manera la incertidumbre en secuencias de varvas en sedimentos puede disminuirse
complementando los datos con el uso de muestras adicionalesde sedimentos, estos extraídos
de un sitio a alguna distancia del que posee la secuencia de varvas perturbadas.
Para mejorar la calidad de alguna imagenI
a
de secuencia de varvas con la ayuda de otra
imagenIb
se ejecutan los siguientes pasos:
1. Se identifican y empatan las secuencias de varvas de ambas imágenes de muestras de
sedimentos laminados;
2. Se les asignan fechas a las varvas, contando desde aquellas correspondientes a la su-
perficie (fechas recientes) hacia el fondo (fechas antiguas);
3. Se encuentran puntos (fechas) para anclar al par de imágenes. Esto es, si la imagen de
sedimentos laminados que queremos complementar (I
a
) contiene alguna perturbación
entre la fechaa0
y la fechaa1
, podemos empatar estas dos fechas a los puntosb
0
y
b
1
, respectivamente, de otra imagen (I
b
) de sedimentos laminados. Al lograr anclar
las fechas, y como sabemos que el área entrea
0
y a
1
corresponde a los sedimentos

14
laminados entreb0
y b1
, podremos reemplazar el área entrea
0
y a1
(área perturbada) de
la imagenIa
por el área entreb0
y b1
de la imagenIb
.
De esta manera podemos eliminar bioturbaciones u otro tipo de perturbaciones presentes en
una secuencia obtenida de sedimentos laminados por medio dela ayuda de otras muestras.
El procedimiento que se ha llevado a cabo para lograr anclar fechas entre pares de imágenes
de sedimentos laminados ha sido en gran parte en forma visual. La comparación visual se
realiza tomando una vecindad alrededor de algún punto de la imagenIb
, digamos el corres-
pondiente al puntob1
. Luego, recorremos la imagenIa
hasta encontrar una región que le
corresponda. En esta región se sitúa el puntoa
1
por lo que este punto corresponde a una
primera ancla. Después, se toma una vecindad alrededor del puntob0
y se recorre de nuevo la
imagenIa
, pero esta vez la búsqueda comienza a partir del ancla anteriormente fijada hacia
la superficie. Al encontrar la región deIa
correspondiente a la vecindad deIb
que contiene al
puntob0
, fijamos la segunda ancla en esa región.
Una estrategia, no totalmente visual, que se ha aplicado para encontrar la correspondencia
entre dos regiones (vecindades alrededor del punto que se pretende anclar) de sedimentos
laminados consiste en calcular la correlación lineal entrelos dos patronesP1
y P2
generados
por franjas verticales de las imágenes (figura 5). Estas franjas verticales poseen un ancho de
k � 1 pixeles. La posibilidad de muestrear a las imágenes por medio de franjas verticales
de anchos variables permite suprimir ruido, así como registrar la naturaleza no estrictamente
horizontal de las laminas de sedimentos.
En casos donde se utilizan muestras de franjas verticales deun pixel de ancho, la inclinación
de las láminas no se registra en el patrónP , mientras que si se utilizan franjas verticales

15
de más de un pixel de ancho, la inclinación de las láminas se reflejan en su correspondiente
patrón como un suavizado en las transiciones claro-oscuro yoscuro-claro (Schaaf, 1995). El
i-ésimo elemento del patrónP se obtiene tomando el promedio de losk pixeles que compo-
nen eli-ésimo renglón de la franja vertical de la imagen.
Figura 5: Vecindad alrededor de algún punto que se desea anclar. La comparación se realizavisualmente, o en su defecto, calculando la correlación lineal entre los valores que se extraende una columna de cada una de las imágenes. Una columna de las cuales se puede extraervalores para compararlos con los de otra imagen se muestra como una franja clara vertical enla imagen.
La correlación lineal que existe entre dos patrones columnas de las vecindades que se de-
sean anclar nos puede dar un índice de la similitud que existeentre las dos vecindades. Para
encontrar la correlación entre los patronesP
m
y P
n
correspondientes a las imágenesm y n,
respectivamente, se utiliza la expresión:
r =
�
i
(P
m
(i)�
�
P
m
)(P
n
(i)�
�
P
n
)
p
�
i
(P
m
(i)�
�
P
m
)
2
p
�
i
(P
n
(i)�
�
P
n
)
2
(1)
donder denota al coeficiente de correlación de los patronesP
m
y P
n
, Pm
(i) representa al
16
i-ésimo valor del patrónPm
de una imagen de muestras de sedimentos laminados. Las canti-
dades �
P
m
y �
P
n
representan a las medias de los vectoresP
m
y Pn
, respectivamente.
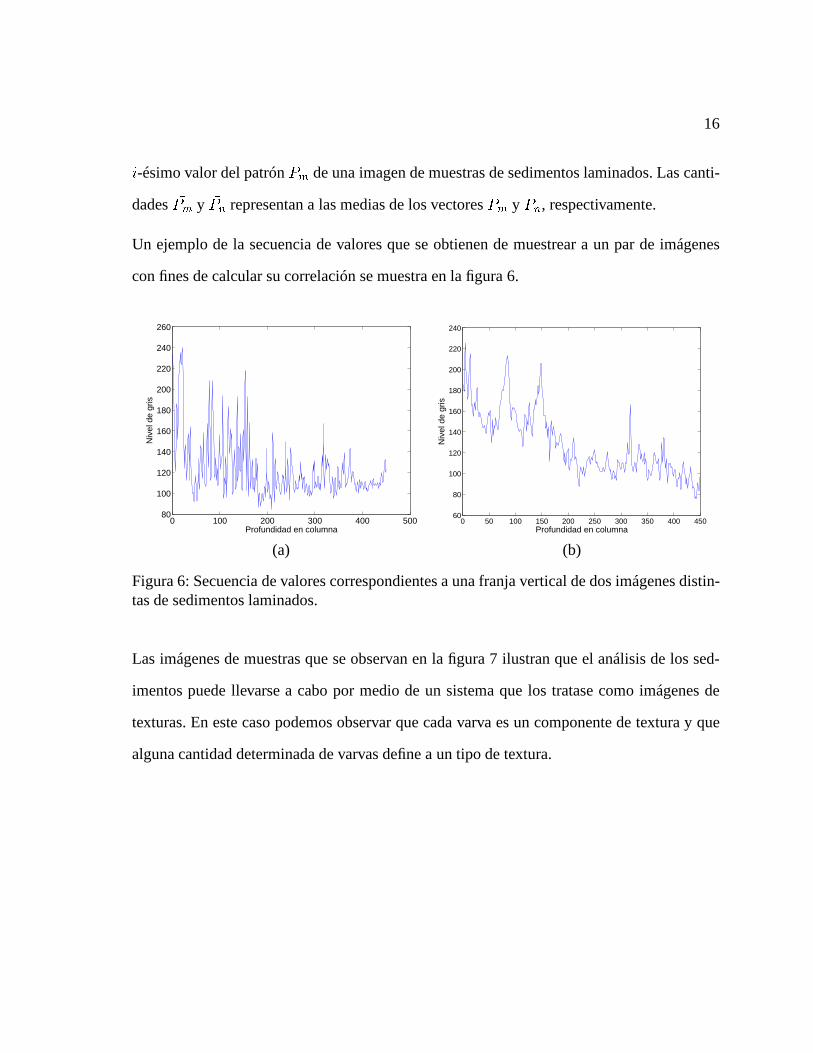
Un ejemplo de la secuencia de valores que se obtienen de muestrear a un par de imágenes
con fines de calcular su correlación se muestra en la figura 6.
0 100 200 300 400 50080
100
120
140
160
180
200
220
240
260
Profundidad en columna
Niv
el d
e gr
is
0 50 100 150 200 250 300 350 400 45060
80
100
120
140
160
180
200
220
240
Profundidad en columna
Niv
el d
e gr
is
(a) (b)
Figura 6: Secuencia de valores correspondientes a una franja vertical de dos imágenes distin-tas de sedimentos laminados.
Las imágenes de muestras que se observan en la figura 7 ilustran que el análisis de los sed-
imentos puede llevarse a cabo por medio de un sistema que los tratase como imágenes de
texturas. En este caso podemos observar que cada varva es un componente de textura y que
alguna cantidad determinada de varvas define a un tipo de textura.

17
1.3. Finalidad del trabajo
El objetivo principal de nuestro trabajo es, mediante un estudio de las técnicas de análisis
de texturas más importantes que se han utilizado en el pasado, diseñar un esquema eficaz
para el análisis de texturas; así como aportar una solución aun problema general de discrimi-
nación de texturas y en particular resolver el problema de encontrar la correspondencia entre
imágenes de texturas de sedimentos laminados.
El problema de encontrar la correspondencia entre texturasde sedimentos laminados es par-
ticularmente complicado dado que a simple vista estas imágenes son muy semejantes. Una
de las pocas propiedades de estas imágenes que las hace distintas son los cambios ligeros en
sus frecuencias y/u orientación. La gran similitud entre las texturas formadas por imágenes
de sedimentos laminados puede notarse al observar la figura 7.
Para realizar este objetivo se construirá un sistema basadoen Java que implementará un banco
de filtros Gabor, un subsistema de posprocesado y de búsquedade correspondencias en base
a un análisis de componentes principales y medidas de distancias multivariadas.

18
(a) (b) (c)
Figura 7: Imágenes de sedimentos laminados. Texturas formada por sedimentos laminados.Nótese que aunque se trata de imágenes de sedimentos distintos, exhiben texturas muy seme-jantes.

Capítulo 2
Características de texturas
La identificación de cualidades perceptibles de texturas esla primera etapa hacia la constru-
cción de un modelo matemático para el análisis de texturas. Las variaciones de niveles de
intensidad dentro de una imagen que caracterizan texturas son debidas a variaciones físicas
en la escena, tales como guijarros en la playa u olas en el agua. Modelar variaciones físicas
es muy difícil, por lo que la textura de una escena es comunmente caracterizada por varia-
ciones bidimensionales de las intensidades presentes en una imagen. Esto puede hasta cierto
punto explicar el que no exista una definición precisa general para el término de textura en la
literatura en el campo de la visión por computadora (Tuceryan y Jain, 1998).
Una manera de extraer información a partir de imágenes es reducir la cantidad de datos real-
izando abstracciones. El diseñador del sistema de visión realiza supuestos acerca de la infor-
mación presente en los datos. También, tendrá que desarrollar algoritmos de procesamiento
basados en estas suposiciones y debe especificar la representación de los datos de tal forma
que la información pertinente sea explícita (Chaney, 1993).
19

20
Un tipo de abstracción utilizada en el campo de visión por computadora es la definición
de unacaracterística. La definición de una característica requiere la suposiciónde que su
presencia particular en la imagen es significante (Chaney, 1993).
Las imágenes de texturas poseen cuantiosas cualidades perceptibles a lo que concierne la
distribución espacial de niveles de gris. Laws (1980) identificó varias propiedades que jue-
gan un papel importante en la descripción de texturas, algunas son: uniformidad, densidad,
granulosidad, aspereza, regularidad, dirección, frecuencia, etc. Algunas de estas cualidades
perceptibles no son independientes de otras. Por ejemplo, la frecuencia no es independiente
de la densidad, y la propiedad de dirección solo aplica a texturas direccionales (Tuceryan y
Jain,1998).
El hecho de que la percepción de texturas posea tantos factores distintos es una razón impor-
tante del por qué no exista un método único para su representación.
2.1. Tipos de características
Autores como González y Woods (1996); Tuceryan y Jain (1998); y Randen y Husøy (1999),
han identificado a un conjunto de tipos de características que pueden ser utilizadas para la
descripción de texturas. Cada uno de estos tipos de características puede separarse de acuerdo
a la naturaleza del método que fue utilizado para extraerlas. Dentro de las características más
comunes se encuentran aquellas adquiridas por medio de:
Métodos estadísticos;
Métodos geométricos;

21
Métodos basados en modelos;
Métodos basados en el procesamiento de señales.
2.1.1. Métodos estadísticos
Una de las cualidades que pueden definir a las texturas es su distribución espacial de valores
de gris (Tuceryan y Jain, 1998 ). Los descriptores estadísticos proporcionan características de
texturas que indican cualidades como suavidad, rugosidad,granulosidad y otras (González y
Woods, 1996).
Uno de los métodos más simples para describir texturas consiste en utilizar momentos del
histograma de niveles de gris de una imagen o, en su defecto, de una región (González y
Woods, 1996).
2.1.1.1. Momentos
Seaz una variable aleatoria que indica la intensidad de una imagen discreta, y seap(zi
), para
i = 1; 2; 3; :::; L, el correspondiente histograma, dondeL es la cantidad de niveles distintos
de gris. Eln-ésimo momento dez respecto a la media se define por:
�
n
(z) =
L
X
i=1
(z
i
�m)
n
p(z
i
) (2)
siendom el valor medio dez (la intensidad media):
m =
L
X
i=1
z
i
p(z
i
) (3)

22
Podemos observar de la ecuación 2 que�
0
= 1 y �1
= 0.
El segundo momento o varianza es denotado por�
2
(Z) y es de particular importancia en la
descripción de texturas. Este segundo momento es una medidadel contraste de niveles de
gris que se puede utilizar para establecer descriptores de suavidad relativa. Por ejemplo, la
medida:
R = 1�
1
1 + �
2
(Z)
(4)
es 0 para áreas de intensidad constante y tiende a 1 para valores grandes de�2(Z). El tercer
momento es una medida de la desviación del histograma.
Las medidas de textura que sólo hacen uso de histogramas presentan la limitación de no
contener información referente a la posición relativa de cada pixel con respecto a otros. Una
manera de introducir este tipo de información en el proceso de análisis de textura consiste
en no solamente considerar la distribución de intensidades, sino también tomar en cuenta las
posiciones de pixeles con valores de intensidad idénticos ocasi idénticos (González y Woods,
1996).
2.1.1.2. Matrices de co-ocurrencia
Haralick (Haralicket al., 1973), propuso el uso de matrices de co-ocurrencia de niveles de
gris. Estas matrices de co-ocurrencia han sido utilizadas ampliamente en el ámbito del análisis
de texturas. La matriz de co-ocurrencia de niveles de grisP
d
para un vector de desplazamiento
d = (dx; dy) se define de la siguiente manera:
P
d
= jf((r; s); (t; v)) : I(r; s) = i; I(t; v) = jgj (5)

23
donde la entrada(i; j) dePd
indica la cantidad de ocurrencias del par de pixeles con valor
de grisi y j que se encuentren separados por una distanciad, j�j denota la cardinalidad del
conjunto,(r; s); (t; v) 2 N �N y (t; v) = (r + dx; s+ dy).
El tamaño de de la matriz de co-ocurrenciaPd
es determinado por la cantidad de niveles
de gris en la imagen de entrada. Por esta razón, la aplicaciónde esta estrategia a menudo
requiere que se vuelvan a cuantificar las intensidades en unas pocas bandas de niveles de
gris, esto para mantener el tamaño deP
d
razonable (González y Woods, 1996).
Por ejemplo, si una imagen con tres niveles de gris:z
1
= 0, z2
= 1, y z3
= 2; es representada
de la siguiente manera:
0
B
B
B
B
B
B
B
B
B
B
�
0 0 0 1 2
1 1 0 1 1
2 2 1 0 0
1 1 0 2 0
0 0 1 0 1
1
C
C
C
C
C
C
C
C
C
C
A
podemos definir al operador desplazamientod comod = (1; 1), o un operador de posición,
como lo llama González y Woods (1996), como ”un pixel hacia laderecha y un pixel hacia
abajo”. Esto nos lleva a obtener la siguiente matriz de co-ocurrencia:
P
d
=
0
B
B
B
B
�
4 2 1
2 3 1
0 2 0
1
C
C
C
C
A
Haralicket al.(1973) han propuesto un conjunto de características que pueden ser calculadas

24
a partir de la matriz de co-ocurrencia. Estas características se presentan en la tablaI.
TablaI: Descriptores de características a partir de una matriz de co-ocurrencia
Descriptor de Textura Fórmula
EnergíaP
i
P
j
P
2
d
(i; j)
EntropíaP
i
P
j
P
d
(i; j) logP
d
(i; j)
ContrasteP
i
P
j
(i� j)
2
P
d
(i; j)
HomogeneidadP
i
P
j
P
d
(i;j)
1+ji�jj
CorrelaciónP
i
P
j
(i��
x
)(j��
y
)P
d
(i;j)
�
x
�
y
Donde�x
y �y
representan a las medias y�x
y �y
representan a las desviaciones estándar de
P
d
(x) y Pd
(y), respectivamente, dondePd
(x) =
P
j
P
d
(x; j) y Pd
(y) =
P
i
P
d
(i; y).
La idea básica es caracterizar el contenido de la matriz de co-ocurrenciaPd
por medio de estos
descriptores (González y Woods, 1996). El uso de características basadas en matrices de co-
ocurrencia posee la desventaja de que no existe un método establecido para seleccionar un
vector de desplazamientod = (dx; dy), y el calcular matrices de co-ocurrencia para distintos
valores ded no es viable (Tuceryan y Jain, 1998).
Un método para utilizar estos descriptores es ¨enseñar¨ a unsistema valores de descriptores
representativos para un conjunto de texturas diferentes. Por consiguiente, la textura de una
región desconocida se determina por la exactitud con la que sus descriptores concuerdan con
los almacenados en la memoria del sistema (González y Woods,1996).
25
2.1.2. Métodos geométricos
2.1.2.1. Telaraña de Voronoi
El uso de telarañas de Voronoi, para el análisis de texturas,fue propuesto por Tuceryan y Jain
(1990), después de que Ahuja (1982) las propusiera como un modelo para definir vecindades.
La finalidad de este método es extraer símbolos representativos de imágenes a partir de las
características de su telaraña de Voronoi. La capacidad de las telarañas de Voronoi para definir
vecindades espaciales locales y que la distribución espacial de sus símbolos representativos
se ve reflejada en la forma de los polígonos de Voronoi es la mayor motivación para su uso.
Para hacer uso de esta técnica en el análisis de texturas primero se deben extraer símbolos
representativos de la imagen. Estos símbolos, en su forma más simple, pueden constar de
puntos con un alto gradiente, así como estructuras más complejas como segmentos de rectas
o bordes cerrados. Después de extraer los símbolos representativos, se procede a construir la
telaraña de Voronoi.
Por simplicidad consideraremos a un símbolo descriptivo como un punto. Consideremos la
existencia deS conjuntos de tres o más símbolos descriptivos en un espacio euclideano.
Supongamos que no todos los puntos son colineales y que ningún conjunto de cuatro puntos
son cocirculares. Consideremos a un par arbitrario de puntosP y Q, el bisector del segmento
de recta que los une contiene a los puntos equidistantes entreP y Q, y parte el plano en dos
partes iguales. El hemi-planoHP
Q
(HQ
P
) contiene a los puntos más cercanos aP (Q) que aQ
(P ). Para cualquier puntoP , se debe obtener un conjunto de tales hemi-planos para varias
elecciones deQ.
La intersecciónQ2S
T
Q6=P
H
Q
P
define una región poligonal formada por puntos cercanos aP

26
más que a cualquier otro punto. Tal región define un polígono de Voronoi asociado con el
puntoP . El conjunto completo de polígonos es conocido como el diagrama de Voronoi deS.
El diagrama de Voronoi junto con los polígonos incompletos en el casco convexo definen a
una telaraña de Voronoi del plano entero. Se dice que dos puntos son vecinos si los polígonos
de Voronoi que los contienen poseen aristas en común (Tuceryan y Jain,1998).
La vecindad de un símbolo descriptivoP se define por el polígono de Voronoi que con-
tiene aP . Las propiedades geométricas de las vecindades de Voronoi definen muchas de las
características de los símbolos descriptivos de la imagen.Para la descripción de texturas se
utilizan las propiedades geométricas de los polígonos de Voronoi. Los momentos de área de
los polígonos de Voronoi describen adecuadamente sus características geométricas. Los mo-
mentos de área de(p+ q)-ésimo orden de una región cerradaR con respecto a un símbolo
representativo con coordenadas(x
0
; y
0
) se definen como:
m
pq
=
Z Z
R
(x� x
0
)
p
(y � y
0
)
q
dxdy (6)
dondep+ q = 0; 1; 2; :::.
Una descripción de las características utilizadas por Hu (Hu, 1962) se da en la tablaII . Las
coordenadas del centroide de un polígono de Voronoi es denotado por(�x; �y).
2.1.2.2. Métodos estructurales
Los modelos estructurales para el análisis de texturas suponen que una textura se compone
de primitivas de textura. La colocación de estas primitivasde acuerdo a ciertas reglas de

27
TablaII : Características de texturas a partir de telarañas de Voronoi
Característica de Textura Fórmula
f
1
m
00
f
2
p
�x
2
+ �y
2
f
3
tan
�1
(�y=�x)
f
4
p
(m
20
�m
02
)
2
+ 4m
2
11
f
5
tan
�1
�
2m
11
m
20�m
02
�
acomodo generan una textura (Tuceryan y Jain, 1998). El análisis estructural de texturas
consiste de dos etapas:
1. Extracción de los elementos de textura;
2. Inferencia de la regla de acomodo.
La regla de acomodo se puede considerar como una de la formaS ! aS, que nos indica que
el conjunto de símbolosaS pueden ser derivados a partir del símboloS, esto es, en vez de
S podemos escribiraS cada vez que este aparezca (González y Woods, 1996). Este tipo de
derivaciones se ilustran en la fiura 8.
(a) (b)
(c) (d)
Figura 8: Una primitiva de textura cuyo símbolo esa (a). Otra primitiva de textura, su símboloesS (b). Patrón que resulta de realizar la derivaciónS ! aS (c). Patrón que resulta de realizarla derivaciónS ! aS ! aaS

28
Si se añaden algunas nuevas reglas a este esquema:S ! bA, A! A, A! , A! bS,
S ! a, donde el símbolob indica un ¨circulo abajo¨ y el símbolo indica un ¨circulo a la
izquierda¨. Este tipo de reglas nos permiten formar patrones en dos dimensiones. La idea
básica es que con un conjunto de reglas de acomodo y con un conjunto de elementos pri-
mitivos de textura podemos limitar la cantidad de posibles composiciones. Un ejemplo bidi-
mensional se puede formar por el patrónaaab baa y las reglas anteriormente definidas; el
resultado se muestra en la figura 9.
Figura 9: Textura generada por el patrónaaab baa
2.1.3. Métodos basados en modelos
Los métodos basados en modelos para el análisis de texturas se basan en la construcción
de un modelo de imagen que puede ser utilizado no solo para describir una textura sino
también para sintetizarla (Tuceryan y Jain, 1998). Las característica o descriptores de este
tipo suponen algún modelo para una subimagen, y los valores de los parámetros o atributos
derivados de ellos son utilizados como características o descriptores (Randen y Husøy, 1999).

29
Los parámetros del modelo capturan las cualidades esenciales de la textura (Tuceryan y Jain,
1998).
2.1.3.1. Modelo autorregresivo
Mao y Jain (1992) han propuesto un método denominado Modelo Multirresolución Autorre-
gresivo. El modelo autorregresivo para una imagenx(m;n) puede ser expresado como:
x(m;n) =
X
(k;l)2�
�(k; l)x(m� k; n� l) + �
"
"(m;n) (7)
donde� denota a una vecindad del modelo,�(k; l) representa a los parámetros del modelo,
y �
"
"(m;n) representa al término de error del modelo. Los vectores de características se
componen de todos los parámetros del modelo (Randen, 1997).
2.1.3.2. Campos aleatorios Markovianos
La teoría referente a los campos aleatorios de Markov (MRF) es una rama de la teoría de prob-
abilidades utilizada para analizar las dependencias espaciales o contextuales de un fenómeno
físico (Chantler, 1994). Los MRFs han adquirido popularidad en el ámbito del modelado
de imágenes. Estos modelos suponen que la intensidad de cadapixel dentro de la imagen
depende solamente de la intensidad de los pixeles que lo rodean.
Los campos aleatorios Markovianos han sido utilizados parala síntesis de texturas (Cross y
Jain, 1982), clasificación de texturas (Chellappa y Chatterjee, 1985; Khotanzad y Kashyap,
1987), segmentación de imágenes (Cohen y Cooper, 1987; Therrien, 1983), restauración de
imágenes (Geman y Geman, 1984), y compresión de imágenes.

30
Los campos aleatorios de Markov pueden ser vistos como generalizaciones bidimensionales
de cadenas de Markov, las cuales se definen en términos de probabilidades condicionales. Las
probabilidades condicionales son las mismas en toda la cadena (o campo) y son dependientes
solo de la vecindad de alguna variable (la suposición de Markov). La forma y el tamaño de
las vecindades son determinados por el orden del modelo. Vecindades de primer, segundo,
tercero y cuarto orden dex se muestran en la figura 10, donde la vecindad de primer orden
consiste de variables etiquetadas con el valor ”1”, la vecindad de segundo orden consiste en
variables etiquetadas con el valor ”2”, etc. (Chantler, 1994).
4 3 44 2 1 2 43 1 x 1 34 2 1 2 4
4 3 4
Figura 10: Vecindades de un MRF
En general, podemos representar a una imagen por una retícula de dimensiónM �M denota-
da porL = f(i; j)j1 � i �M; 1 � j � Ng. I(i; j) es una variable aleatoria que representa el
valor de gris del pixel en la posición(i; j) dentro deL. Podemos simplificar el indizado sobre
la retícula, por simplificación matemática, por medio deI
t
tal quet = (i� 1)N + j. SeaA el
contradominio común para todas las variables aleatoriasIt
y sea
= f(x
1
; x
2
; :::; x
MN
)jx
t
2 A; 8tg el conjunto que denota a las etiquetas deL.
Según Tuceryan y Jain (1998), un campo aleatorio de Markov esun campo aleatorio cuya
función de masa de probabilidad posee las propiedades de positividad, Markovianidad y ho-
mogeneidad. Esta última propiedad no es necesaria de acuerdo con Li (2001) . Si denotamos

31
a una vecindad de ordenr alrededor de un puntoIt
comoIrt
, un campo aleatorio es un campo
aleatorio de Markov si y solo si cumple con:
P (I
t
) > 0 (8)
P (I
t
jI
1
t
; I
2
t
; :::; I
n
t
) = P (I
t
jI
1
t
) (9)
Esta última propiedad (Markovianidad) implica que la probabilidad de que algún pixel tome
cierto valor depende estrictamente de sus vecinos y no de toda la imagen.
La propiedad de un campo aleatorio de Markov es que mientras la variable aleatoriaI puede
tomar cualquier valor, la probabilidad de que tome cierto valor está condicionada por los
valores que poseen los pixeles en su alrededor (vecindad). Esto es, existe una función local
de densidad de probabilidades que describe las vecindades de la imagen (Paget y Longstaff,
1996).
Dentro del modelado de campos aleatorios de Markov las características de texturas corres-
ponden a los parámetros del modelo. La extracción de características de una imagen de tex-
tura es equivalente a la estimación de parámetros del modelo(Li, 2001).

32
2.1.4. Métodos basados en procesamiento de señales
2.1.4.1. Métodos espectrales
El espectro de Fourier ha demostrado ser de gran utilidad para la detección de la direccion-
alidad de patrones bidimensionales poriódicos o casi periódicos de una imagen. Algunas
características útiles del espectro de Fourier para describir texturas son (González y Woods,
1996):
Picos prominentes del espectro de Fourier que muestran la dirección de los patrones de
textura;
Picos en el plano de frecuencia dan el periodo espacial fundamental de los patrones;
La eliminación de los componentes periódicos mediante el filtrado deja elementos de
la imagen no periódicos; que se pueden tratar por técnicas estadísticas.
2.1.4.2. Transformada de coseno discreto
La transfomada de coseno discreto es una herramienta popular para la codificación de imá-
genes debido a su buen desempeño y su facilidad de implementación (Ramstadet al., 1995).
Esta transformada sirve como base para la codificación de imágenes de formato JPEG (Ran-
den, 1997).
La transformada de coseno discreto se define como:
C(u) = �(u)
N�1
X
x=0
f(x) os
�
(2x + 1)u�
2N
�
(10)

33
parau = 0; 1; 2; :::; N � 1.
La transformada de coseno discreto inversa se define como:
f(x) =
N�1
X
u=0
�(u)C(u) os
�
(2x+ 1)u�
2N
�
(11)
parax = 0; 1; 2; :::; N � 1.
Para estas dos últimas ecuaciones,� se define como:
�(u) =
8
>
<
>
:
q
1
N
parau = 0
q
2
N
parau = 1; 2; 3; :::; N � 1
(12)
Para el caso bidimensional la transformada de coseno discreto se define como:
C(u; v) = �(u)�(v)
N�1
X
x=0
N�1
X
y=0
f(x; y) os
�
(2x+ 1)u�
2N
�
os
�
(2 + 1)v�
2N
�
(13)
parau; v = 0; 1; 2; :::; N � 1.
La transformada inversa se define como:
f(x; y) =
N�1
X
u=0
N�1
X
v=0
�(u)�(v)C(u; v) os
�
(2x+ 1)u�
2N
�
os
�
(2y + 1)v�
2N
�
(14)
parax; y = 0; 1; 2; :::; N � 1.

34
2.1.5. Filtros Gabor
2.1.5.1. Base biológica
La gran capacidad de los humanos para realizar segmentacióny clasificación de texturas así
como estudios realizados en el campo de la percepción visualhumana han dado pie a un
paradigma para la extracción de características de texturas basado en filtros Gabor (Kumar y
Pang, 2000).
Los esquemas basados en filtros Gabor constan de una serie de filtros, cada uno sintonizado
a una escala y a una orientación distinta. Esto, justificado en gran parte por la existencia de
evidencias fisiológicas de que la respuesta de células selectivas a la orientación en la corteza
visual puede ser modelada utilizando filtros Gabor (Daugman, 1984; Daugman, 1985). Los
campos receptivos tipo Gabor son fundamentales en el procesamiento biológico de imágenes
de texturas, pero cualquier extensión hecha hacia el campo de la visión por computadora debe
mantenerse en el marco de la computación (Kumar y Pang, 2000).
El uso de detectores multicanal para el análisis de texturases un tema inspirado por la teoría
de filtrado multicanal del procesamiento de información visual llevado a cabo en gatos y
monos (Hubel y Wiesel, 1962; Hubel y Wiesel, 1974). Campbelly Robson (1968) proponen
que el sistema visual humano descompone la imagen formada enla retina en cierta cantidad
de imágenes filtradas donde cada una contiene variaciones deintensidad sobre una gama
estrecha de frecuencias. Posteriormente, se descubrió queel cerebro contiene una gran cadena
de neuronas que filtran información visual por orientación ytamaño en cada punto de la
corteza visual (De Valoiset al., 1989).
La fisiología y psicofísica de la visión temprana se enfoca enla forma en que los mecanismos

35
visuales convierten y codifican los patrones de luz que llegan al ojo.
2.1.5.2. Descripción matemática
Usualmente a las imágenes se les considera como un conjunto de pixeles (dominio espacial)
o como la suma de sinusoidales (dominio de frecuencias). Gabor, en cambio, observó que
la representación en el dominio espacial y la representación en el espacio de frecuencias
son justamente extremos opuestos de una cantidad infinita nonumerable de representaciones
posibles en un dominio conjunto espacio/frecuencia (Dunnet al., 1994).
Si una imagen se representa en el dominio espacial, no tendríamos información alguna acerca
de los números de onda contenidos en un punto de la imagen. Conocemos la posición con
una exactitud de�x, pero el número de onda local en este punto es desconocida, puede variar
entre� 1
2�x
y 1
2�x
. Si se utiliza la representación en el espacio de frecuencias (representación
de número de onda) caemos en el caso contrario (Jähne y Hau�ecker, 2000). Cada pixel en
este dominio representa un número de onda con la más alta resolución de número de onda
posible para el tamaño de la imagen dada, el cual es1
N�x
para una imagen conN pixeles en
cada coordenada. Toda información pocisionalposicional es perdida bajo esta representación
ya que un punto en el espacio de número de onda representa una estructura periódica que se
encuentra distribuida sobre toda la imagen.
La representación exclusiva en cualquiera de los dominios anteriormente mencionados es
inadecuada para analizar objetos dentro de imágenes.
La transformada de Fourier es un análisis del contenido global de frecuencias de una señal.
Existen cuantiosas aplicaciones donde se requiere que el análisis se encuentre localizado

36
tanto en el dominio espacial como en el dominio de frecuencias. Para satisfacer este requisito
podemos introducir una dependencia espacial al análisis deFourier. Una forma clásica de
introducir esta dependencia es por medio de la transformadaventaneada de Fourier.
Para el caso unidimensional, la transformada ventaneada deFourier de una señalf(x) se
define como:
F
w
(u; �) =
Z
f(x)w(x� �)e
�j2�ux
dx (15)
La funciónw(x) es la función de ventana. Cuando esta función de ventana es una función
Gaussiana, la transformada de Fourier ventaneadaF
w
(u; �) es llamada Transformada Gabor
(Jähne y Hau�ecker, 2000).
2.1.5.3. Definición de filtros Gabor
Para nuestro estudio definimos a un filtro Gabor para el análisis de texturas como Dunn (Dunn
et al., 1994), de la siguiente manera:
m(x; y) = i(x; y) � h(x; y) (16)
donde� denota al operador convolución bidimensional,i a la imagen de la textura por
analizar,h a una función que Dunnet al. (1994) llama ”función elemental Gabor”, ym es la
respuesta del filtro. Las funciones elementales Gabor poseen propiedades importantes que las
hacen atractivas para ser utilizadas en el análisis de texturas. Algunas de estas propiedades
son:

37
Las funciones elementales Gabor son las únicas funciones que alcanzan la cota inferior
especificada por el principio de incertidumbre (Bracewel, 1999; Dunnet al., 1994). De
hecho, los filtros Gabor poseen las ventanas espacio/frecuencia más estrechas de todas
las transformadas ventaneadas de Fourier (Prasadet al., 1997). Esto permite que las
funciones elementales Gabor puedan ser configuradas para ser altamente selectivas en
el espacio de frecuencias y al mismo tiempo poseer localización espacial.
La forma de las funciones elementales Gabor poseen semejanza a campos receptivos
de células simples de los conductos visuales (Kulikowskyet al., 1980), por lo que
biológicamente poseen similitud en funcionamiento al sistema visual de los humanos.
Son filtros pasa-banda. Esta característica permite que lasfunciones elementales Ga-
bor puedan ser configuradas para extraer una banda de frecuencias específica de una
imagen.
2.1.5.4. Principio de incertidumbre de Heisenberg
Es ampliamente conocido que el producto del ancho de banda y la duración de una señal
no puede ser menor que un cierto valor constante mínimo. Estehecho es esencialmente un
fenómeno matemático que surge a partir de la interdependencia que existe entre el tiempo
y la frecuencia, la cual hace imposible la especificación arbitraria de señales en el plano
tiempo-frecuencia (Bracewell, 1999).
Básicamente lo que este principio nos da a saber es que el componente de frecuencia de una
función y su localidad (posición en la cual ese componente defrecuencia se encuentra) no
pueden ser medidas a un grado arbitrario de simultaneidad.

38
Sabemos que una funciónf y su transformada de Fourier:
^
f = F (f) (17)
no pueden ambas estar altamente localizadas. Esto es, sif se desvanece (o posee valores
muy pequeños) fuera de un intervalo pequeño, entonces^
f debe ser amplia y viceversa. Para
explicar este fenómeno recurrimos al teorema de ancho de banda/principio de incertidumbre
(Howell, 2001):
Supongamos que las funcionesf y ^
f son acotadas, y la transformada de Fourier^
f = F (f)
existe. Definimos aE como la energía en el proceso descrito porf y a�x como una medida
del ancho de la gráfica def , la cual puede ser utilizada para determinar una cota efectiva de
la duración def . Estas cantidades son descritas como:
�x =
�
1
E
Z
1
�1
x
2
jf(x)j
2
dx
�
1=2
(18)
�w =
�
1
E
Z
1
�1
w
2
jF (w)j
2
dw
�
1=2
(19)
donde:
E =
Z
1
�1
jf(x)j
2
dx =
Z
1
�1
jF (w)j
2
dw (20)
también, supongamos que nif ni F sean la función cero, y que:
1. �x o�w tiendan a infinito; o que

39
2. wF (w) sea transformable y que tantof 0 y wF (w) sean acotadas; o que
3. xf(x) sea transformable, y que tantoF 0 y xf(x) sean acotadas;
entonces:
�x�x �
1
4�
(21)
con la igualdad cumpliendose si y solo si:
f(x) = Ae
� x
2
(22)
para algún par de constantesA y , tal que > 0.
2.1.5.5. Función Gabor compleja
Una función Gabor es una función exponencial compleja modulada por una Gaussiana en
el dominio espacial, y en el dominio de frecuencias es una Gaussiana desplazada. Estas fun-
ciones fueron definidas por Dennis Gabor en 1946 (Gabor, 1946) para el caso unidimensional.
Posteriormente, Daugman (1984) las extendió para el caso bidimensional y mostró sus cual-
idades concernientes al principio de incertidumbre (Chan yChen, 2000).
2.1.5.5.1. Función Gabor compleja unidimensional Para el caso unidimensional, una
función Gabor se denota como sigue:
h(x) =
1
p
2��
2
e
�
1
2
(
x�x
0
�
)
2
e
j2�[U(x�x
0
)℄ (23)

40
dondeU representa la frecuencia del plano sinusoidal. La transformada de Fourier deh(x)
se denota como:
H(u) = e
2�
2
[�(U�u)℄
2
e
�jx
0
(U�u) (24)
Gráficamente la función Gabor en el dominio espacial y en el dominio de frecuencias se
pueden observar en las figuras 11 y 12, respectivamente.
0 10 20 30 40 50 60 70 80 90 100−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Figura 11: función Gabor unidimensional en el dominio espacial con parámetrosw = 0;9 y� = 5.

41
0 10 20 30 40 50 60 70 80 90 1000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
Figura 12: Función Gabor unidimensional en el dominio de frecuencias con parámetrosw =
15 y � = 0;06.
2.1.5.5.2. Función Gabor compleja n-dimensional En general, para el caso n-dimensional,
una función Gabor se expresa de la siguiente manera:
h(p) = f(p)m(p) (25)
dondef(p) es una función Gaussiana dada por:
f(p) =
1
(2�)
n=2
det(�)
1=2
e
[
�
1
2
(p�p
0
)
T
�
�1
(p�p
0
)
℄ (26)
y m(p) es es la función compleja de modulación:
m(p) = e
[
jw
T
0
(p�p
0
)
℄ (27)

42
dondep 2 R
n y p0
2 R
n definen a las coordenadas espaciales de algún punto donde es
evaluada la función Gabor y del centro de la función Gabor, respectivamente.Rn representa
a la frecuencia de traslación de la función Gabor.� es una matriz de covarianza positiva
definida de dimensiónn� n denotada por la siguiente expresión:
(�
i;j
) = Æ
i;j
�
2
j
(28)
donde�2j
denota a la varianza de la función Gaussiana en direcciónj y Æ
i;j
a la delta de
Kronecker definida por:
Æ
i;j
=
8
>
<
>
:
1 parai = 1
0 parai 6= j
(29)
2.1.5.5.3. Función Gabor compleja bidimensional Para el caso bidimensional (el cual
será utilizado para nuestro estudio), las coordenadas espaciales horizontales y verticales son
representadas por el vectorp = [x; y℄
T y el vectorp0
= [x
0
; y
0
℄
T denota la traslación de su
origen. La forma de la función Gaussianaf(p) es determinada por la matriz de covarianza�
definida por:
� =
0
B
�
�
2
x
0
0 �
2
y
1
C
A
(30)
donde�2x
y �2y
son las varianzas de la función Gaussiana sobre el ejex e y respectivamente,
las cuales son utilizadas para controlar la orientación y sensibilidad de la función Gabor. Por
consiguiente:

43
det (�) = �
2
x
�
2
y
(31)
El vectorw = [u; v℄ denota las frecuencias axiales sobre dos coordenadas mientras que el
vectorw0
= [u
0
; v
0
℄ representa la traslación de frecuencias de la función Gabor.
En dos dimensiones un filtro Gabor es un filtro pasa-banda sintonizado a una orientación
� =tan
�1
�
u
0
v
0
�
del ejeu y centrado en la frecuenciaw0
= [u
0
; v
0
℄
T .
La representación en el espacio de frecuencias de un filtro Gabor se obtiene calculando su
transformada de Fourier para pasar a tener a partir de 25, 26 y27:
H(u; v) = e
�2�
2
[
(�
x
[u�u
0
℄)
2
+(�
y
[v�v
0
℄)
2
℄
e
�jp
t
0
(w�w
0
) (32)
2.1.5.5.4. Función Gabor real Una función Gabor compleja de la forma 25, 26 y 27
puede separarse en sus componentes real e imaginaria.
Esta descomposición resulta en la siguiente expresión:
h(p) = f(p)
�
os
�
w
0
T
(p� p
0
)
�
+ i sen
�
w
0
T
(p� p
0
)
�
(33)
pasamos a obtener las expresiones para las partes real e imaginaria de la función Gabor
descrita por< [h(p)℄ e= [h(p)℄, respectivamente.
< [h(p)℄ =
1
2� det (�)
1=2
e
�
1
2
(p�p
0
)
T
�
�1
(p�p
0
)
os
�
w
0
T
(p� p
0
)
�
(34)

44
= [h(p)℄ =
1
2� det (�)
1=2
e
�
1
2
(p�p
0
)
T
�
�1
(p�p
0
)
sen
�
w
0
T
(p� p
0
)
�
(35)
La parte real de funciones Gabor (figura 13) han sido utilizadas por Casasent y Smokelin
(1994; Casasent, 1995) y Weber y Casasent (1995) para la detección de objetos, Kumar y
Pang (2000) la utilizan para la detección de defectos de textiles a partir de imágenes. Una
combinación de la parte real y la parte imaginaria fue utilizada por Weldon y Higgins (1996)
para la segmentación de imágenes de texturas.
En general, dado que muchas aplicaciones en la visión por computadora requieren respuestas
en tiempo real, es necesario implementar mecanismos eficientes para el cálculo de imágenes
filtradas por funciones Gabor. La forma de una función Gabor bidimensional real en el do-
minio espacial se ilustra en la figura 13.
Figura 13: Función Gabor real bidimensional en el dominio espacial.

Capítulo 3
Detectores multicanal
La suposición general al utilizar métodos basados en filtroses que la distribución de energía
en el dominio de frecuencias identifica a una textura. Por consiguiente, si el espectro de
frecuencias de una imagen poseedora de textura se descompone en una suficiente cantidad de
bandas, se generarán firmas de energía espectral. Estas firmas espectrales serán distintas para
texturas diferentes. Basados en este principio, varios autores han propuesto diversos métodos
para la segmentación/clasificación de imágenes de texturas(Randen y Husøy, 1999).
En experimentos hechos con gatos y monos, los cuales poseen un sistema de visión similar al
humano (Mallat, 1989), se ha mostrado que estos animales descomponen imágenes visuales
en imágenes filtradas, cada una con distintos rangos de frecuencias y distintas orientaciones
(Campbell y Robson, 1968).
Los resultados de estos experimentos nos sugieren que un modelo adecuado para el análisis
de texturas sería aquel que nos permitiera filtrar a las imágenes por medio de filtros Gabor
sensibles a distintas orientaciones y frecuencias. Para lograr este tipo de filtrado es necesario
45

46
utilizar un detector multicanal (banco de filtros) .
Llamaremos unBanco de filtros Gaboro un Detector Multicanal Gabora un esquema de
filtrado basado en filtros Gabor, el cual, a partir de una imagen de entrada, responderá con
una cantidadk de imágenes filtradas por filtros pasa-banda Gabor, dondek es igual a la
cantidad de canales en el banco. Cada canal en el banco es sintonizado para filtrar a la imagen
de entrada a una frecuencia y orientación diferente. A cada canal del banco de filtros se le
pueden añadir diversos operadores para obtener al finalk imágenes, que en su conjunto,
forman ”características” que representan y disciernen a latextura de entrada de otras.
3.1. Función Gabor real en múltiples escalas y múltiples di-
recciones
La forma analítica de una función Gabor en el dominio espacial, con capacidad de ser sin-
tonizada a distintas orientaciones y frecuencias es la siguiente:
h(p)
mn
=
1
2� det (�)
1=2
e
�
1
2
(p
n
�p
0
)
T
�
�1
(p
n
�p
0
)
os
�
w
m
T
(p
n
� p
0
)
�
(36)
dondem es el índice de escala yn el índice de orientación. La frecuencia de modulación
espacial es denotada porwn
y es en una sola dirección ya que utilizamos a la función Ga-
bor para detectar altura y ancho. El vectorp
0
desplaza el origen de la función Gabor real.
Una función Gabor para distintas orientaciones es obtenidahaciendo una transformación de
coordenadas~P = J
n
P
n
y ~
P
0
= J
n
P
0
. La matriz de rotaciónJn
es dada por:

47
J
n
=
0
B
�
os �
n
0
0 � sen �
n
1
C
A
(37)
el ángulo�n
rota a la función Gabor para cualquier orientación deseada.Los parámetroswm
y �n
representan la frecuencia angularm y la orientaciónn, respectivamente. Un ejemplo con
16 filtros (4 orientaciones y 4 frecuencias) Gabor se muestraen escala log-polar en la figura
14.
v
u
q
fmax
Figura 14: Representación en el dominio de frecuencias de 16filtros Gabor en escala log-polar
La forma de las funciones Gabor utilizadas en un banco de filtros con 16 canales (4 orienta-
ciones y 4 frecuencias) se muestra en la figura 15.

48
Figura 15: Mapas de intensidad de funciones Gabor en el dominio espacial sintonizadas acuatro orientaciones (0Æ, 45Æ, 90Æ, 135Æ) y a cuatro frecuencias (0.015, 0.03, 0.06, 0.12).
3.1.1. Esquemas anteriores
3.1.1.1. Esquema de Randen y Husoy
Varios autores han propuesto esquemas para el análisis de texturas basados en bancos de
filtros, ya sea para su clasificación o segmentación. Randen yHusøy (1999) proponen el
esquema para la segmentación de texturas que se observa en lafigura 16.

49
Imagen de entrada
Filtrado
No linealidad
Función suavizante
No linealidadnormalizante
Clasificador
Imágenes filtradas
Función localde energía
Mapa de clases
Vectores de características
Figura 16: Esquema multicanal propuesto por Randen y Husøy.
3.1.1.1.1. Etapa de Filtrado La primera etapa del esquema propuesto por Randen y
Husøy (1999) es la etapa de Filtrado. Suponiendo un esquema de filtrado dek canales, esta
etapa descompone a la imagen de entrada enk imágenes filtradas, cada una por un filtro con
distinta configuración. En el caso de que se utilicen filtros Gabor en este esquema, cada canal
del banco de filtros deberá estar sintonizado a una frecuencia y a una escala distinta.
3.1.1.1.2. Etapa de función de energía localLa segunda etapa, la función de energía
local, se encarga de estimar la energía de la respuesta de losfiltros sobre una región local
(Randen y Husøy, 1999). En esencia cada filtro es un filtro pasabanda sensible a una frecuen-
cia y a una escala en particular. La función local de energía es utilizada con el fin de transmitir

50
áreas en cada canal donde la energía pasabanda local es fuerte a un nivel de gris alto, y vice-
versa (Randen, 1997). Esta segunda etapa consiste en aplicar un operador no lineal seguido
por un filtro suavizante a cada canal del banco de filtros utilizado. Existen varias opciones de
operadores no lineales y de filtros suavizantes para esta etapa.
3.1.1.1.3. Operadores no linealesDentro de los operadores no lineales comunmente uti-
lizados se encuentran:
La magnitudj�j, utilizado por Dunn y Higgins (1995; Dunn et al., 1994);
El cuadrado(�)2, utilizado por Farrokhnia (1990) y Unser (1995);
La tangente rectificadajtanh(��)j por Jain y Farrokhnia (1991) y Randen y Husøy
(1994).
Los operadores de magnitud y el cuadrado son operadores libres de parámetros. La sigmoide
rectificada posee un parámetro de saturación� que requiere ser sintonizado. Randen y Husøy
recomiendan utilizar la sigmoide rectificada en los casos donde sea posible sintonizar este
parámetro para realizar la tarea requerida.
Para la función sigmoide rectificada Randen (Randen y Husøy,1994) recomienda fijar el
parámetro de saturación en� = 0;25 en la expresión:
jtanh(�x)j (38)

51
Para el caso de la sigmoide (51) propuesta por Kubota y Huntsberger (1998) se fija el parámetro
de saturación en� = 1. Algunos efectos de variar el parámetro de saturación en este último
operador se observa en la figura 17.
0 100 200 300−1
−0.5
0
0.5
1
0 100 200 300−1
−0.5
0
0.5
1
0 100 200 300−1
−0.5
0
0.5
1
0 100 200 300−1
−0.5
0
0.5
1
(a) (b)
(c) (d)
Figura 17: Función sigmoidetanh(�x) con distintos valores de saturación. (a)� = 1 (b)� = 0;25 (c) � = 0;1 (d) � = 0;05
Otra manera en que este operador puede ser visto, para simplicidad en la programación es:
tanh(�x) =
1� e
�2�x
1 + e
�2�x
(39)

52
3.1.1.1.4. Filtro suavizante Los filtros suavizantes se utilizan para hacer que la imagen
se torne algo borrosa y para reducir el ruido (González y Woods, 1996). Mientras que existe
la posibilidad de utilizar otras opciones como filtro suavizante (ej. filtro rectangular), el filtro
suavizante utilizado por Randen (Randen, 1997) es un filtro Gaussiano de la forma:
g(x; y) =
1
2��
2
e
�
x
2
+y
2
2�
2 (40)
donde�x
= �
y
= �.
La respuesta de un filtro Gaussiano es un promedio ponderado de la vecindad de cada pixel,
donde el mayor peso es puesto en los pixeles cercanos al centro. Por esta razón el filtro
Gaussiano realiza un suavizado más apacible y mantiene mejor los bordes que un filtro de
promediado de similar tamaño. El resultado de aplicar un filtro suavizante Gaussiano con
distintos valores para el parámetro� se muestra en la figura 18.
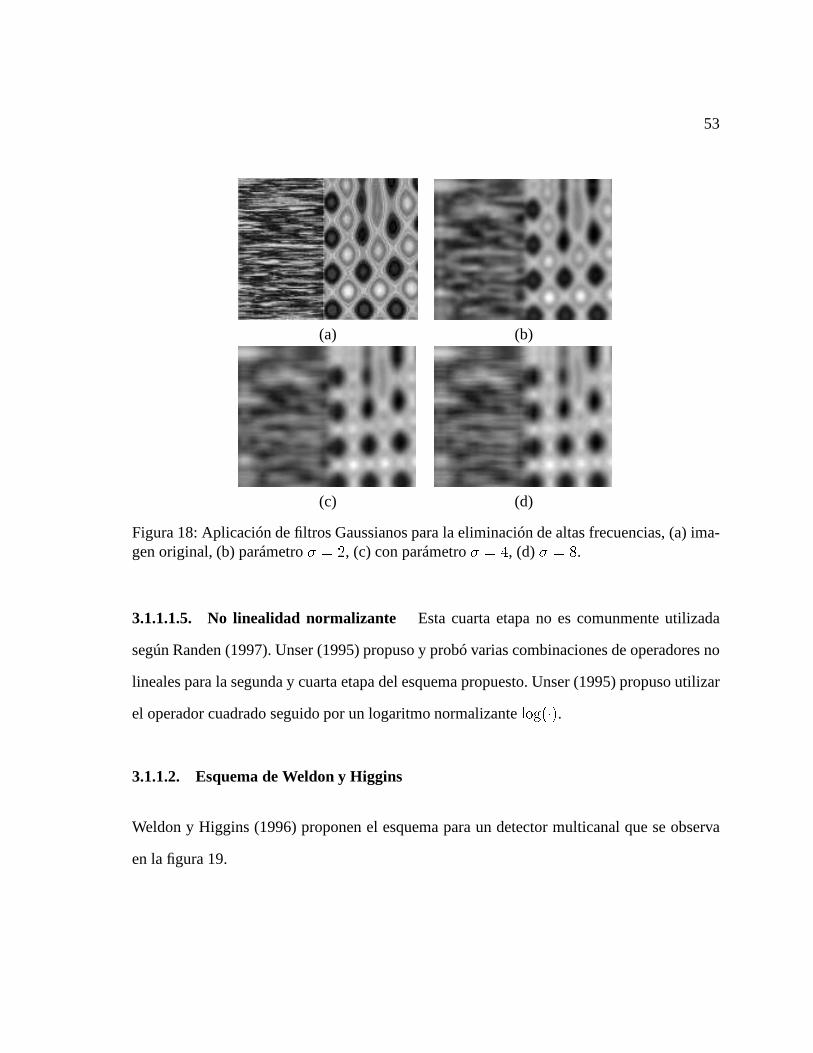
53
(a) (b)
(c) (d)
Figura 18: Aplicación de filtros Gaussianos para la eliminación de altas frecuencias, (a) ima-gen original, (b) parámetro� = 2, (c) con parámetro� = 4, (d)� = 8.
3.1.1.1.5. No linealidad normalizante Esta cuarta etapa no es comunmente utilizada
según Randen (1997). Unser (1995) propuso y probó varias combinaciones de operadores no
lineales para la segunda y cuarta etapa del esquema propuesto. Unser (1995) propuso utilizar
el operador cuadrado seguido por un logaritmo normalizantelog(�).
3.1.1.2. Esquema de Weldon y Higgins
Weldon y Higgins (1996) proponen el esquema para un detectormulticanal que se observa
en la figura 19.

54
Clasificador
Imagen deentrada
h (x,y)1
h (x,y)k
i (x,y)h1
i (x,y)hk
m (x,y)1
m (x,y)k
g (x,y)1
g (x,y)pk
m (x,y)p1
m (x,y)pk
c (x,y)
Postprocesado
Imagensegmentada
i (x,y)s
Figura 19: Esquema para clasificar/segmentar imágenes de texturas propuesto por Weldon yHiggins
Este esquema fue utilizado para la segmentación de una imagen i(x; y) conN � 2 texturas
disjuntast1
; t
2
; t
3
; :::; t
N
. El método consta dek canales donde la primera etapa de cada canal
consta en filtrar a la imagen de entradai(x; y) con un filtro Gaborhj
(x; y) con1 � j � k.
Luego, a la respuesta del filtro Gabor aplicado,i
hj
(x; y) con 1 � j � k, se le aplica el
operador magnitudj�j. Como respuesta del operador magnitud obtenemos am
j
(x; y) con
1 � j � k. Posteriormente, se aplica un filtro pasabaja Gaussiano denotado porgpk
(x; y) con
1 � j � k. La salida de este último paso lo denotamos porm
pj
(x; y) con1 � j � k y se da
como entrada a un clasificador. Por último se aplica un postprocesamiento morfológico para
reducir el error de clasificación cerca de los bordes entre texturas de la imagen.
3.1.2. Configuración de filtros
El paradigma de detectores multicanal o bancos de filtros ha mostrado gran potencial en el
análisis de texturas. Algo de trabajo se ha invertido al estudio de ciertos tipos de filtros y su

55
configuración, sin embargo, la relación entre las diferencias entre texturas y la configuración
de los filtros necesaria para discriminarlas sigue, en gran parte, desconocida. El conocer la
configuración adecuada de un filtro en particular para la discriminación de dos texturas en
una imagen es esencial para la configuración de detectores multicanal (Dunnet al., 1994).
x
y
sy2
sx2
Dx
Dy
Figura 20: Esta figura muestra una imagen que consta de dos texturas compuesta por dos¨texeles¨ distintos,t
1
a la izquierda yt2
a la derecha y algunos parámetros que deben serdeterminados para configurar al filtro Gabor que las discrimine.
La configuración de un filtro Gabor se realiza al especificar cinco parámetros básicos de una
función elemental Gabor:U; V; �x
; �
y
; y �. Utilizando el modelo de texturas de Dunnet al.
(1994), en el cual una imagen consiste de dos texturas distintas las cuales se conforman por
texelest1
y t
2
, respectivamente (figura 20), esto es, por la regiónR
1
(t
1
; �x
1
; �y
1
) y por la
regiónR2
(t
2
; �x
2
; �y
2
).�xi
denota a la separación que existe entre texeles de alguna región
con textura compuesta por el texeli sobre el ejex, mientras que�yi
denota la separación que
existe entre texeles de alguna región con textura compuestapor el texeli sobre el ejey. A
partir de este modelo de texturas podemos especificar parámetros para un filtro que discierna

56
una textura de la otra.
La manera de determinar los parámetros adecuados para un filtro Gabor para dos texturas
dentro de una imagen se muestra en la tablaIII .
TablaIII : Criterios para elegir los parámetros de un filtro Gabor paradiscriminar dos texturasen una misma imagen.
Parámetro Criterio para determinar su valorV ar(x) �
x
= �x, tal que�x = m��n(�x
1
; �x
2
)
V ar(y) �
y
= �y, tal que�y = m��n(�y
1
; �y
2
)
(U; V ) U =
2�
�x
; V =
2�
�y
� Sobre la dirección de la cuadrícula de texeles
La elipse de la figura 20 muestra el contorno de la función Gaussiana del filtro Gabor. El
centro de la elipse, denotado por(x; y) representa la posición de la función elemental de
Gabor al momento que se calcula la salida del filtro Gabor en elpunto(x; y). La elección de
�
x
y �y
compromete a la variación de la salida del filtro Gabor y la exactitud de la localización
de fronteras entre texturas disímiles. Esto es, cuando�
x
> �x y �
y
> �
y
el filtro captura a
múltiples texeles sin importar su posición dentro de la imagen. Aunque la posición de los
texeles varía dentro de la función Gaussiana mientras el filtro progresa a través de la imagen,
la salida o respuesta del filtro Gabor se mantiene aproximadamente constante sobre toda una
región. En el caso cuando�x
� �
x
o �y
� �
y
, la respuesta del filtro depende en si un texel
ocurre o no dentro de la función Gaussiana de la función elemental Gabor. Esto ocasiona,
como resultado del filtro, variaciones periódicas a través de la región. Para evitar variaciones
significantes en la respuesta del filtro, tanto�
x
�
x
como �
y
�
y
deben ser grandes para que el filtro
cubra a varios texeles. Si�x
y �
y
son ambos grandes, la función Gaussiana del filtro se
extenderá a ambas regiones (en el caso de una imagen como la dela figura 20) ocasionando

57
mayor dificultad en la localización de fronteras. En la práctica, el desempeño de los filtros no
es significativamente sensible al valor de estos cocientes,por lo que se puede acordar fijarlos
al valor de la unidad,�x
= �
x
y �y
= �
y
.
3.1.3. Análisis de componentes principales
Existen problemas que surgen al intentar efectuar reconocimiento de patrones con datos
pertenecientes a espacios de dimensiones altas. Frecuentemente es conveniente hacer una
transformación de los datos a un espacio de dimensión menor.El propósito de la reducción
de dimensión de los datos es pasar de una representación de lainformación de alta dimen-
sión a una representación en un espacio de menor dimensión mientras mantenemos la mayor
cantidad de información relevante posible (Bishop, 1996).
El análisis de componentes principales o transformada de Karhunen-Loève fue por primera
vez descrita por Karl Pearson en 1901. En un principio este procedimiento fue utilizado en
problemas de biometría. La descripción de un procedimientode cómputo para llevar a cabo
el análisis de componentes principales fue realizado hasta1933 por Hotelling (Manly, 1994).
El análisis de componentes principales es un método multivariado cuyo objetivo es tomarp
variablesx1
; x
2
; x
3
; :::; x
p
y encontrar combinaciones de estas para producir nuevas variables
z
1
; z
2
; z
3
; :::; z
p
que sean no correlacionadas. Esta falta de correlación en los datos es una
característica deseable ya que nos garantiza que los índices midan diferentes ”dimensiones”
en la información. Estos índices se encuentran ordenados dela siguiente manera:
V ar(z
1
) � V ar(z
2
) � V ar(z
3
) � ::: � V ar(z
p
) (41)

58
dondeV ar(zi
) denota la varianza dezi
en el conjunto de datos bajo consideración. Estas
cantidadeszi
son llamadas componentes principales.
Al realizar análisis de componentes principales se espera que las varianzas de la mayoría
de los índices sean tan pequeñas tal que puedan ser descartados. Cuando esto sucede, la
variación del conjunto de datos puede ser descrita adecuadamente por un conjunto pequeño
de variableszj
. La representación consiste en:
z = A
t
x (42)
dondeA es la matriz formada por los primerosj vectores propios de la matriz de covarianza
de los datos. La variación de lasp variables originales es representada por las nuevas variables
z
j
cuya cantidad es menor quep. Esto es,j < p.
Debe notarse que no siempre el análisis de componentes principales funciona, esto es en
el sentido que fuerza a un conjunto grande de variables a ser representadas por un conjun-
to menor de variables transformadas. Si las variables originales no están correlacionadas,
entonces el análisis de componentes principales no es apto para reducir la dimensión de los
datos. Los mejores resultados se obtienen cuando las variables originales son altamente corre-
lacionadas, positiva o negativamente. En este caso, podemos considerar que veinte o treinta
variables pueden adecuadamente ser representadas por dos otres componentes principales
(Manly, 1994).
3.1.4. Medición de distancias multivariadas
Una gran cantidad de problemas pueden ser vistos en términosde distancias entre:

59
Observaciones individuales;
Muestras de observaciones;
Poblaciones de observaciones.
Varios métodos para la medición de distancias han sido propuestos y utilizados en el análisis
multivariado (Manly, 1994).
3.1.4.1. Distancias entre observaciones individuales
Si deseamos medirn individuos, y cada uno posee valores parap variablesx1
; x
2
; x
3
; :::; x
p
.
Los valores para el individuoi pueden ser denotados porxi1
; x
i2
; :::; x
ip
y aquellos valores
para el individuoj porxj1
; x
j2
; :::; x
jp
. El problema que nos interesa es el medir la ¨distancia¨
entre el individuoi y el individuoj.
3.1.4.1.1. Distancia Euclidiana Un tipo de medida de distancia que puede servir en
muchas aplicaciones es la distancia Euclidiana:
d
ij
=
v
u
u
t
p
X
k=1
(x
ik
� x
jk
)
2 (43)
Sabemos que si uno de los fenómenos medidos varía mucho más que los otros, entonces, este
dominará el cálculo de las distancias. En la práctica, es usualmente deseado que todas las
variables tengan la misma influencia en el cálculo de las distancias. Esto se logra cambiando
la escala de las variables antes de hacer el cálculo de las distancias para estandarizarlas. La

60
estandarización se puede lograr dividiendo cada variable entre su desviación estándar para
losn individuos siendo comparados (Manly, 1994).
3.1.4.2. Distancias entre poblaciones y muestras
Han habido diversos métodos propuestos para la medición de distancias multivariadas entre
poblaciones cuando existe información disponible acerca de sus medias, varianzas y covari-
anzas (Manly, 1994).
3.1.4.2.1. Distancia de Penrose Si analizamosg poblaciones y las distribuciones multi-
variadas de estas poblaciones son conocidas parap variablesx1
; x
2
; :::; x
p
. Sea�ki
la media
de la variablexk
de lai-ésima población y suponemos que la varianzaV
k
es igual para todas
las poblaciones. Penrose en 1953 propuso una medida para la distancia entre la poblacióni y
la poblaciónj.
P
ij
=
v
u
u
t
p
X
k=1
(�
ki
� �
kj
)
2
pV (k)
(44)
Una desventaja que posee la distancia Penrose para muchas aplicaciones es que esta medida
no toma en cuenta la correlación entre lasp variables (Manly, 1994).
3.1.4.2.2. Distancia de Mahalanobis Otra medida de distancia que en cambio sí toma
en cuenta la correlación entre variables es la distancia de Mahalanobis denotada por:
D
2
ij
=
p
X
r=1
p
X
s=1
(�
ri
� �
rj
) v
rs
(�
si
� �
sj
) (45)

61
tal quevrs denota el elemento delr-ésimo renglón y de las-ésima columna de la matriz
inversa de la matriz de covarianza para lasp variables. Una forma cuadrática que puede
denotar a la distancia Mahalanobis es la siguiente:
D
2
ij
= (�
i
� �
j
)
T
V (�
i
� �
j
) (46)
donde
�
i
=
0
B
B
B
B
B
B
B
�
�
1i
�
2i
...
�
pi
1
C
C
C
C
C
C
C
A
(47)
este vector�i
es el vector de medias para lai-ésima población yV es la matriz de covarianza.
Esta medida solo puede ser utilizada si la matriz de covarianzaV es la misma para todas las
poblaciones.
La distancia de Mahalanobis es frecuentemente utilizada para medir la distancia entre una
observación en particular y el centro de la población de la cual esta observación en particular
proviene.
Si x= x
1
; x
2
; :::; x
p
son los valores deX = X
1
; X
2
; :::; X
p
para el individuo cuya población
que lo origina posee valores medios� =�
1
; �
2
; :::; �
p
entonces:
D
2
=
p
X
r=1
p
X
s=1
(x
r
� �
r
)v
rs
(x
s
� �
s
) (48)

62
D
2
= (x� �)
T
V (x� �) (49)
Si estas ecuaciones son utilizadas para datos de muestras, la matriz de covarianzaV debe
ser reemplazada con una estimación que tome en cuenta todas las muestras disponibles. Si
existenm muestras donde lai-ésima muestra es de tamañoni
con una matriz de covarianza
muestral deCi
entonces es la aproximación de la matriz de covarianza que tome en cuenta
todas las poblaciones disponibles se denota por:
C =
P
m
i=1
(n
i
� 1)C
i
P
m
i=1
(n
i
� 1)
(50)
En principio la distancia de Mahalanobis, para muchas aplicaciones, es una medida de dis-
tancia superior a la distancia de Penrose. La superioridad de esta medida de distancia se basa
en que la distancia Mahalanobis, a diferencia de la distancia de Penrose, utiliza información
de las covarianzas (Manly, 1994).
3.2. Esquema propuesto
El esquema propuesto para encontrar la correspondencia entre imágenes de texturas consiste
en la utilización de detectores multicanal Gabor para obtener características de cada una de las
imágenes. Luego, disminuir la dimensión de los datos por medio del análisis de componentes
principales (transformada de Karhunen-Loève), y por último medir la distancia Penrose entre
la imagen que llamamos imagen fuente y cada una de las demás imágenes, estas últimas
llamadas imágenes destino.

63
La imagen fuente es aquella de la cual serán medidas las distancias hacia las demás imágenes,
estas últimas llamadas imágenes destino.
Cada una de las imágenes a tratar es procesada por un detectormulticanal de la forma que se
observa en la figura 21.
Textura fuente
Filtrado Gabor
No linealidad
Función suavizante
Transformada deKarhunen-Loève
Generación denube de puntos
Figura 21: Esquema propuesto para la extracción de características de cada una de las texturasa procesar por el sistema.
La extracción de características propuesta consta en procesar a cada una de las imágenes por
cinco etapas: filtrado Gabor, aplicación de una no linealidad, una función suavizante, análisis
de componentes principales, y convertir los datos arrojados por el análisis de componentes
principales a una nube o cúmulo de puntos en un espacion-dimensional, donden es la can-
tidad de componentes principales utilizados.

64
3.2.1. Filtrado Gabor
La etapa de filtrado, en un esquema multicanal, aplica filtrosGabor a diferentes escalas y ori-
entaciones a la imagen de entrada. Esta etapa es semejante a aquellas aplicadas por otros au-
tores como Dunnet al. (1994) y Randen (1997), pero a diferencia de otros métodos nosotros
solamente utilizaremos la parte real de las funciones Gabor.
Las funciones Gabor reales actúan como detectores de manchas (blob detectors) (Casasent
y Smokelin, 1994) mientras que las funciones Gabor imaginarias actúan como detectores
de bordes. Malik y Perona (1994) han mostrado que las funciones Gabor imaginarias no
son útiles para la discriminación de texturas. Kumar y Pang (2000) asegura que mientras la
contribución de funciones Gabor imaginarias para el análisis de texturas es insignificante,
estas son responsables por casi el 50 % del tiempo de cómputo.
Un aspecto negativo para el uso de filtros Gabor es que son computacionalmente costosas.
Por esta razón, sumado a lo anteriormente mencionado, en nuestro trabajo solo utilizaremos
funciones Gabor reales (34) e ignoraremos las imaginarias(35).
Aunque existe evidencia experimental que sugiere que la capacidad de un detector multicanal
de discernir texturas aumenta mientras mayor sea la cantidad de canales que se utilicen (Wel-
don y Higgins, 1996), recomendamos utilizar un conjunto de 16 filtros Gabor para extraer
características de cada una de las imágenes involucradas ennuestro análisis. Este conjunto
de funciones autosimilares son obtenidas al variar el parámetro de rotación� y su frecuencia
w
m
(figura 15).
Las cuatro frecuencias espaciales que se deberán utilizar son:fm�ax
,fm�ax =2
,fm�ax =4
,fm�ax =8
. La
frecuenciafm�ax
denota la frecuencia que permita que ocurra un texel de la textura cuyo es-

65
paciamiento entre texeles sea la menor. Los ángulos que se utilizarán son rotaciones de45Æ,
desde0Æ hasta135Æ (0,45,90,135 grados).
Se deberá limitar la cantidad de canales del banco de filtros debido al compromiso que existe
en la cantidad de canales y el desempeño del sistema. Además,el utilizar 16 canales en el
esquema planteado es respaldado por evidencias biológicasque aseguran una similar cantidad
de canales de procesamiento utilizados por el sistema visual humano (Daugman, 1984).
3.2.2. No linealidad
El objetivo de hacer un filtrado multicanal Gabor y posteriormente aplicar una no linealidad
es el transformar a las fronteras o bordes entre texturas en discontinuidades detectables (Ran-
den y Husøy, 1994). Mientras que varios autores (Randen y Husøy, 1994; Farrokhnia, 1990;
Kubota y Huntsberger, 1998) han determinado la sigmoide rectificada apropiada, también
puede utilizarse un simple operador:
tanh (�x) (51)
Nosotros hemos optado por utilizar el cuadrado para nuestromodelo, esto es, elevar al cuadra-
do cada elemento de la imagen de entrada. Sin embargo, damos la opción de aplicar cualquiera
de estos dos operadores mencionados.

66
3.2.3. Función suavizante
La función suavizante que se deberá utilizar es una función Gaussiana con parámetros tales
que eliminen, lo más posible, altas frecuencias de la imagentratada. Aunque es posible uti-
lizar otros tipos de filtros para la eliminación de las altas frecuencias, La función Gaussiana
localiza fronteras entre texturas de manera adecuada (Randen y Husøy, 1994).
3.2.4. Transformada de Karhunen Loève
Después de haber filtrado la textura, aplicado la no linealidad y suavizado la imagen obten-
emos como resultado imágenes, una por cada canal de nuestro detector multicanal (figura
21).
3.2.4.1. Vector de observaciones
Si tomamos los valores�i
correspondientes a los niveles de intensidad en la posición(x; y) de
la i-ésima imagen (22), podemos formar un vectorX
(x;y)
de dimensiónd. Este vectorX(x;y)
se puede considerar como una observación de cierto fenómenodescrito por un conjunto de
d variables�i
donde el fenómeno es la textura que nos interesa y cada�
i
es la respuesta
del canali de nuestro banco de filtros para la posición(x; y) de lai-ésima imagen. Si este
es el caso, entonces la imagen de la textura que buscamos de dimensiónm� n puede verse
como un conjunto dem� n observaciones de la textura regida pord variables (debido a que
utilizamosd filtros y obtenemosd imágenes de salida). La estrategia para obtener los vectores
de observaciones se ilustra en la figura 22.

67
Figura 22: Obtención del vector de observacionesX
(x;y)
a partir de lasd imágenes de salidadel detector multicanal
3.2.4.2. Matriz de observaciones
A partir de este planteamiento podemos definir lo que llamaremos una matriz de observa-
ciones. Tomando al vectorX(x;y)
= [�
1
; �
2
; :::; �
d
℄ como un vector que describe una obser-
vación en particular. A la matriz de observaciones la definimos como el conjunto de todas
las observacionesX(x;y)
dondex = 0; 1; 2; :::; m e y = 0; 1; 2; :::; n. El elemento�i;j
de la
matriz de observaciones para un fenómeno dado denota al valor de laj-ésima variable para
la i-ésima observación.
El formato que deberá llevar la matriz de observaciones se muestra en la tablaIV .
TablaIV : Formato de una matriz de observaciones
Observación Variable 1 Variable 2 ... VariabledX
1
�
1;1
�
1;2
... �
1;d
X
2
�
2;1
�
2;2
... �
2;d
......
......
...X
m�n
�
m�n;1
�
m�n;2
... �
m�n;d

68
Si se plantea esta forma de preprocesamiento de nuestras imágenes, podemos aplicar la trans-
formada de Karhunen-Loève o Análisis de Componentes Principales sobre la matriz de ob-
servaciones para reducir la dimensión de nuestros datos.
Al aplicar la transformada de Karhunen-Loève podemos utilizar algunos pocos, digamos
l < d (4 o 5), componentes principales para describir nuestra textura. Al hacer esto, pasamos a
representar a cada observación de la texturaX
(x;y)
= [�
i
℄ parai = 1; 2; :::; d, comoZ(x;y)
= [z
k
℄
parak = 1; 2; :::; l.
Nuestro objetivo será comparar la matriz de observaciones de la imagen fuente con la de la
imagen desino.
3.2.5. Cálculo de correspondencias entre características
Después de realizar la extracción de características de cada una de las imágenes de texturas
involucradas en nuestro sistema, debemos encontrar una métrica que nos indique si existe una
correspondencia entre dos texturas o no.
Dado que las características de cada una de las imágenes tratadas son vistas como un cúmulo
de puntos en un espaciod-dimensional, podemos medir la similitud entre un par de texturas
midiendo la distancia multivariada de sus características, es decir de los cúmulos o nubes de
puntos que las representan.
El método para medir las distancias entre los cúmulos de puntos de las texturas que se utilizará
es la distancia de Penrose. Utilizaremos la distancia de Penrose dado que esta no requiere el
uso de una matriz de covarianza. Esta cualidad, en muchas aplicaciones es indeseable, pero
en nuestro caso, el hecho de que no tome en cuenta a una matriz de covarianza es una cualidad

69
que nos ahorra recursos de cómputo. Además, el uso de una matriz de covarianza para nue-
stros cálculos es innecesario dado que al aplicar el análisis de componentes principales hemos
eliminado la correlación de las variables originales. Las nuevas variables transformadas, de
las cuales construimos los cúmulos de puntos, no están correlacionadas.
Al medir las distancias multivariadas entre los cúmulos de puntos de las imágenes de texturas
involucradas en nuestro sistema podremos darnos cuenta de la correspondencia entre ellas.
Los valores de la distancia entre dos imágenes serán menoresmientras la correspondencia
entre ellas sea mayor, y viceversa. Es decir, la distancia Penrose entre las características de
texturas es inversamente proporcional a la correspondencia que existe entre ellas.
Globalmente el sistema propuesto para encontrar la correspondencia entre texturas se muestra
en la figura 23.

70
Textura fuente
Filtrado Gabor
No linealidad
Función suavizante
Transformada deKarhunen-Loève
Generación denube de puntos
Textura destino 1
Filtrado Gabor
No linealidad
Función suavizante
Transformada deKarhunen-Loève
Generación denube de puntos
Textura destino 2
Filtrado Gabor
No linealidad
Función suavizante
Transformada deKarhunen-Loève
Generación denube de puntos
Textura destino N
Filtrado Gabor
No linealidad
Función suavizante
Transformada deKarhunen-Loève
Generación denube de puntos
Cálculo de correspondencias entre características
Distancia entre la textura fuentey las texturas destino
Figura 23: Esquema general del sistema para encontrar correspondencias entre texturas
3.3. Identificación de estructuras sedimentarias contiguas
A menudo es necesario conocer si la estructura sedimentariade dos texturas distintas corre-
sponde a una sola tomada con una contigüidad a la otra. Esto es, verificar que aun cuando dos
texturas no correspondan a ser las mismas, una sea continuación, por la derecha o izquierda,
de otra.
Un ejemplo de una textura que es continuación de otra es el caso de las texturas S14 y S15
(figura 46). Si colocamos el extremo izquierdo de la textura S15 junto al extremos derecho

71
de la textura S14 (buscando continuidad por la derecha) se puede observar que los extremos
de estas dos texturas empatan. De la misma manera podemos encontrar que la textura S2 es
una continuación por la derecha de S1 (figura 46).
En el pasado el verificar si una textura formada por sedimentos laminados es continuación
de otra se realizaba exclusivamente de manera visual y se carecía de un método automático o
semi-automático que verificara la contigüidad de pares de texturas.
A continuación presentamos un esquema que logra determinarla contigüidad de dos texturas.
Al realizar el análisis para encontrar la contigüidad de dostexturas se conoce que solo existen
tres posibilidades como resultado:
1. Que las dos imágenes no correspondan a la misma textura ;
2. Que las dos imágenes correspondan a la misma pero no empaten los extremos (cambio
de fase);
3. Que las dos imágenes correspondan (o casi correspondan) ala misma y empaten los
extremos;
Ejemplos para cada uno de estos casos se muestran en la figura 24.

72
(a) (b) (c)
Figura 24: Tipos de contiguidad que existe entre imágenes detexturas de sedimentos lamina-dos.(a) muestra dos imagenes de sedimentos laminados distinos. (b) muestra dos imágenes desedimentos laminados que corresponden a la misma textura pero no empatan sus extremos.En (c) las imagenes corresponden (o casi corresponden) a la misma textura y empatan susextremos
El método propuesto para identificar estructuras sedimentarias contiguas se basa en el conocimien-
to que se tiene acerca de las discontinuidades que se generanen las vecindades cercanas a
las fronteras entre texturas al aplicar el método propuesto. Según Dunnet al. (1994), cuando
se aplica un canal de un banco de filtros Gabor como el que hemospropuesto a una imagen
compuesta por dos texturas distintas se genera un escalón entre ellas, de igual manera, cuan-
do se aplica un canal del banco de filtros Gabor a una imagen compuesta por dos regiones
que contienen la misma textura, pero una de ellas se encuentra desfasada verticalmente, se
genera un impulso abrupto en la frontera. Como sabemos que sidos texturas que empatan en
sus fronteras y son parecidas (poseen semejante frecuenciay orientación) son vistas por el
método propuesto como una sola textura, podemos asegurar que al aplicar un canal del banco
de filtros Gabor no se generan discontinuidades (escalón o impulso) entre ellas.
Lo primero que se debe hacer para aplicar el método para determinar la contigüidad de dos
texturas que describen estructuras sedimentarias es juntar lado a lado a las dos imágenes cuya
contigüidad se desea poner a prueba. Después se puede seleccionar solamente una vecindad

73
que abarque a la frontera entre las dos texturas así como una región de cada textura. La figura
24 muestra algunas de estas imágenes listas para probar su contigüidad.
Ahora, para determinar si dos texturas contenidas en una imagen preparada de la manera
descrita anteriormente son contiguas o no, proponemos los siguientes criterios:
1. Si al aplicar un canal del banco de filtros Gabor a la imagen obtenemos una imagen sin
discontinuidades (escalón o salto abrupto), entonces las dos texturas son contiguas y
empatan exactamente en sus fronteras.
2. Si al aplicar un canal del banco de filtros Gabor a la imagen obtenemos una imagen
con una discontinuidad de tipo escalón, entonces las dos texturas son distintas.
3. Si al aplicar un canal del banco de filtros Gabor a la imagen obtenemos una imagen con
una discontinuidad de tipo salto abrupto o delta y se mantienen las correspondientes
regiones a cada textura a intensidad semejante, entonces las dos texturas son contiguas
pero no empatan exactamente en sus fronteras. Esto es, son las mismas texturas pero
una se encuentra desfasada verticalmente.
Para los casos en que se requiera determinar si existe o no un salto abrupto entre dos texturas
se puede utilizar un detector de bordes (a 90 grados) de Cannypara resaltar esta característica.
Un ejemplo para el criterio 1 aplicado sobre la imagen 24 (c) se observa en la figura 25. Un
ejemplo para el criterio 2 aplicado sobre la imagen de la figura 24(a) se observa en la figura
38(d). Como ejemplo para el criterio 3 se muestra en la figura 26.

74
Figura 25: aplicación de un canal del banco de filtros Gabor. No existe discontinuidad entretexturas, por lo que las dos estructuras sedimentarias son contiguas.
En la figura 26 se observa una imagen que representa el resultado de aplicar nuestro proced-
imiento a dos texturas idénticas desfasadas.
020
4060
80100
0
20
40
60
800
0.5
1
1.5
2
x 107
Figura 26: aplicación de un canal del banco de filtros Gabor a dos estructuras sedimentariasidenticas desfazadas. Existe una discontinuidad (salto) en la imagen que resulta de aplicar elfiltro Gabor y el suavizado.

Capítulo 4
Experimentación
En este capítulo se presentan algunos resultados de aplicarlos métodos propuestos en la
sección 3.2 a imágenes de texturas.
En la sección 4.1 presentamos la configuración básica adoptada para encontrar corresponden-
cias entre imágenes de texturas Brodatz y de sedimentos laminados.
En la sección 4.2 se procesan imágenes compuestas por dos texturas con el fin de observar
resultados visuales de la aplicación del método propuesto.
En la sección 4.3 se aplica el software desarrollado para encontrar correspondencias entre
imágenes de texturas Brodatz.
En la sección 4.4 se aplica el software desarrollado para encontrar correspondencias entre
imágenes de texturas de sedimentos laminados.
Como manera de análisis de las distintas métricas en espacios multivariados y de la influencia
de la transformada de Karhunen-Loève (TKL) se calculan las correspondencias entre texturas,
75

76
tanto de Brodatz como de sedimentos laminados, usando las siguientes configuraciones:
1. Distancia Euclidiana aplicada a características obtenidas después de aplicar la TKL a
la salida del banco de filtros Gabor;
2. Distancia Euclidiana aplicada a características obtenidas directamente del banco de
filtros Gabor;
3. Distancia Mahalanobis aplicada a características obtenidas directamente del banco de
filtros Gabor;
4. Distancia Penrose aplicada a características obtenidasdespués de aplicar TKL a la
salida del banco de filtros Gabor;
5. Distancia Penrose aplicada a características obtenidasdirectamente del banco de filtros
Gabor.
4.1. Configuración del sistema para pruebas
La configuración del sistema se llevó a cabo sintonizando al banco de la manera discutida en
la sección 3.1.2. Si suponemos que la ocurrencia de los texeles de una textura ocurre cada 5
pixeles, tanto enx como eny, podemos fijar a�x
y �
y
y la frecuencia máximafmax
como
se indica en la tablaIII . De esta forma podemos deducir los valores de los 16 canales del
detector multicanal.
Los valores de configuración del detector multicanal utilizado para pruebas se muestran en la
tablaV. En todos los casos se utilizó como función no lineal la cuadrática y se usó un filtro
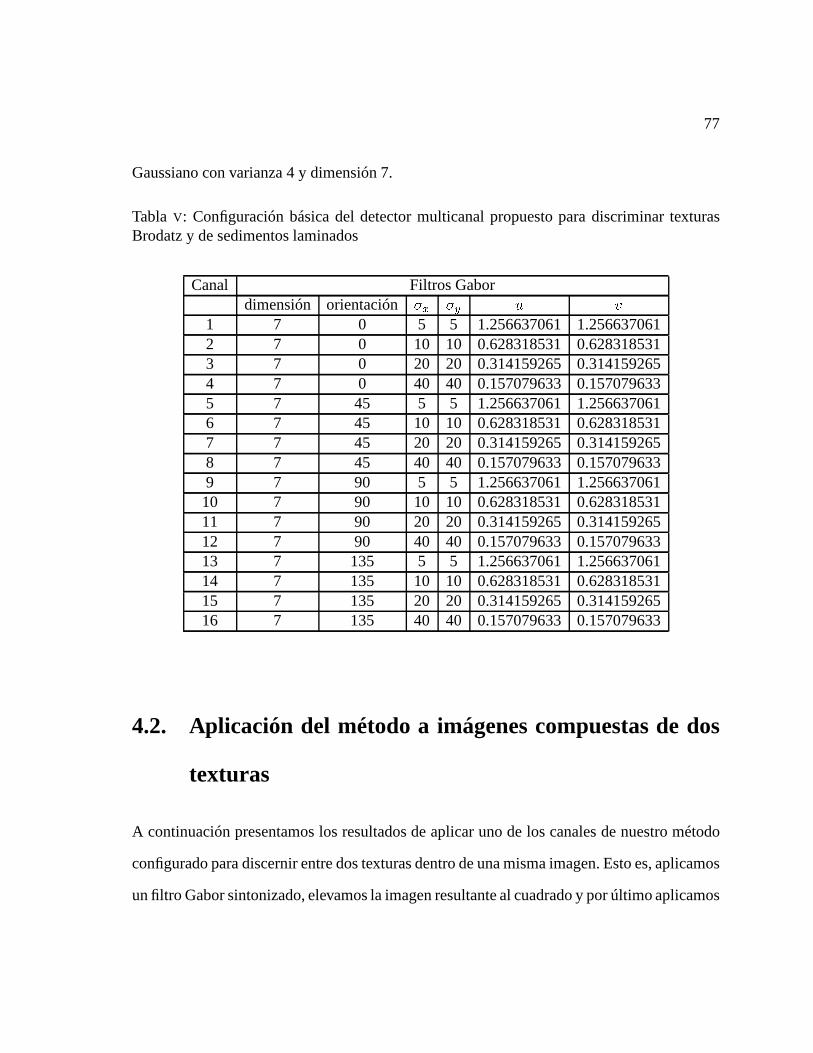
77
Gaussiano con varianza 4 y dimensión 7.
Tabla V: Configuración básica del detector multicanal propuesto para discriminar texturasBrodatz y de sedimentos laminados
Canal Filtros Gabordimensión orientación �
x
�
y
u v
1 7 0 5 5 1.256637061 1.2566370612 7 0 10 10 0.628318531 0.6283185313 7 0 20 20 0.314159265 0.3141592654 7 0 40 40 0.157079633 0.1570796335 7 45 5 5 1.256637061 1.2566370616 7 45 10 10 0.628318531 0.6283185317 7 45 20 20 0.314159265 0.3141592658 7 45 40 40 0.157079633 0.1570796339 7 90 5 5 1.256637061 1.25663706110 7 90 10 10 0.628318531 0.62831853111 7 90 20 20 0.314159265 0.31415926512 7 90 40 40 0.157079633 0.15707963313 7 135 5 5 1.256637061 1.25663706114 7 135 10 10 0.628318531 0.62831853115 7 135 20 20 0.314159265 0.31415926516 7 135 40 40 0.157079633 0.157079633
4.2. Aplicación del método a imágenes compuestas de dos
texturas
A continuación presentamos los resultados de aplicar uno delos canales de nuestro método
configurado para discernir entre dos texturas dentro de una misma imagen. Esto es, aplicamos
un filtro Gabor sintonizado, elevamos la imagen resultante al cuadrado y por último aplicamos

78
un filtro Gaussiano. El objetivo de los experimentos es ilustrar la capacidad para discernir
entre dos texturas.
4.2.1. Experimento 1
En este experimento se procesa la imagen en la figura 27 compuesta por dos texturas artifi-
ciales distintas. Después de aplicar el método propuesto seobtiene como resultado la imagen
en la figura 28, donde se observa que el nivel de los pixeles de una de las texturas es resaltado
mientras el nivel de los pixeles de la otra textura son suprimidos. El efecto que tiene aplicar
cada uno de los pasos del método sobre la imagen original se observa en la figura 29.
Figura 27: Imagen de prueba construida por dos texturas.
Figura 28: Imagen resultado de aplicar un canal del método propuesto para discernir entredos texturas.

79
Figura 29: Gráfica de los valores de los pixeles de la imagen original (a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores de los pixeles dela imagen después de aplicar a (b) el operador(�)
2(c). Resultado de aplicarle a (c) un filtrosuavizante Gaussiano (d).
4.2.2. Experimento 2
En este experimento se procesa la imagen en la figura 30 compuesta por dos texturas Brodatz
distintas. Después de aplicar el método propuesto se obtiene como resultado la imagen en
la figura 31, donde se observa que el nivel de los pixeles de unade las texturas es resaltado
mientras el nivel de los pixeles de la otra textura son suprimidos. El efecto que tiene aplicar
cada uno de los pasos del método sobre la imagen original se observa en la figura 32.

80
Figura 30: Imagen de prueba construida por dos imágenes de texturas Brodatz: D6 en el fondoy D17 en el centro.
Figura 31: Imagen resultado de aplicar un canal del método propuesto para ldiscernir entredos texturas.

81
Figura 32: Gráfica de los valores de los pixeles de la imagen original (a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores de los pixeles dela imagen despues de aplicar a (b) el operador(�)
2(c). Resultado de aplicarle a (c) un filtrosuavizante Gaussiano (d).
4.2.3. Experimento 3
En este experimento se procesa la imagen en la figura 33, compuesta por dos texturas Brodatz
distintas. Después de aplicar el método propuesto se obtiene como resultado la imagen en la
figura 34, donde se observa que el nivel de los pixeles de una delas texturas es resaltado
mientras el nivel de los pixeles de la otra textura son suprimidos. El efecto que tiene aplicar

82
cada uno de los pasos del método sobre la imagen original se observa en la figura 35.
Figura 33: Imagen de prueba construida por dos imágenes de texturas Brodatz: D5 a laizquierda y D92 a la derecha
Figura 34: Imagen resultado de aplicar un canal del método propuesto para discernir entredos texturas.

83
Figura 35: Gráfica de los valores de los pixeles de la imagen original (a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores de los pixeles de laimagen después de aplicarle a (b) el operador(�)
2(c). Resultado de aplicarle a (c) un filtrosuavizante Gaussiano (d).
4.2.4. Experimento 4
En este experimento se procesa la imagen en la figura 36, compuesta por dos texturas de
sedimentos laminados distintas. Después de aplicar el método propuesto se obtiene como
resultado la imagen en la figura 37, donde se observa que el nivel de los pixeles de una de
las texturas es resaltado mientras el nivel de los pixeles dela otra textura son suprimidos. El
efecto que tiene aplicar cada uno de los pasos del método sobre la imagen original se observa

84
en la figura 38.
Figura 36: Imagen de prueba compuesta por dos texturas de sedimentos laminados.
Figura 37: Imagen resultado de aplicar un canal del método propuesto para discernir entredos texturas.

85
Figura 38: Gráfica de los valores de los pixeles de la imagen original (a). Valores de lospixeles de la imagen filtrada por un filtro Gabor sintonizado (b). Valores de los pixeles dela imagen después de aplicar a (b) el operador(�)
2(c). Resultado de aplicarle a (c) un filtrosuavizante Gaussiano (d).
4.3. Experimentos con imágenes Brodatz
Para los siguientes experimentos se utilizaron algunas imágenes de texturas Brodatz (1966).
Estas imágenes forman un conjunto utilizado como pruebas por varios autores como Randen
y Husøy (1999). Aunque el objetivo de nuestro trabajo no es elencontrar correspondencias
entre imágenes de texturas Brodatz, consideramos importante someter a estas imágenes a

86
pruebas (figura 39).
Estas imágenes fueron suministradas al sistema para encontrar algunas correspondencias en-
tre ellas. También, se perturbaron algunas de estas imágenes para mostrar la sensibilidad del
sistema. Las imágenes de Brodatz perturbadas se muestran enla figura 40.
D1 D2 D3 D4
D5 D6 D8 D10
D18 D35 D36 D49
D64 D65 D94 D95
Figura 39: Imágenes de texturas Brodatz utilizadas en las evaluaciones del sistema.

87
D5pert D94r1 D94r2 D94r3
Figura 40: Imágenes perturbadas de prueba Brodatz. A la imagen D94 se le añadió ruidoGaussiano con� = 10 (D94r1),� = 20 (D94r2) y� = 30 (D94r3), respectivamente.
El resultado de buscar correspondencias de algunas imágenes de texturas Brodatz de acuerdo
a las configuraciones descritas en la sección 4 se muestra a continuación.
4.3.1. Experimento 5
En este experimento se calculan las correspondencias entrela imagen fuente D1 y las imá-
genes destino D1, D2, D3, D4, D5, D6, D8, D10, D18, D35, D36, D49, D64, D65, D94 y
D95. La correspondencia entre las texturas se calculó para todas las configuraciones men-
cionadas en la página en la página 76. El resultado del cálculo de estas correspondencias se
muestra en las figuras 41, 42 y 43, respectivamente .

88
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
1
2
3
4
5
6x 10
13
Texturas Destino
Dis
tanc
ia
(a)
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
2
4
6
8
10
12x 10
24
Texturas Destino
Dis
tanc
ia
(b)
Figura 41: Correspondencias para la textura D1 calculadas por medio de las distancias: (a)Mahalanobis sin TKL y (b) Mahalanobis con TKL.

89
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
2
4
6
8
10
12
14x 10
7
Texturas Destino
Dis
tanc
ia
(a)
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
2
4
6
8
10
12
14x 10
13
Texturas Destino
Dis
tanc
ia
(b)
Figura 42: Correspondencias para la textura D1 calculadas por medio de las distancias: (a)Euclidiana sin TKL y (b) Euclidiana con TKL.
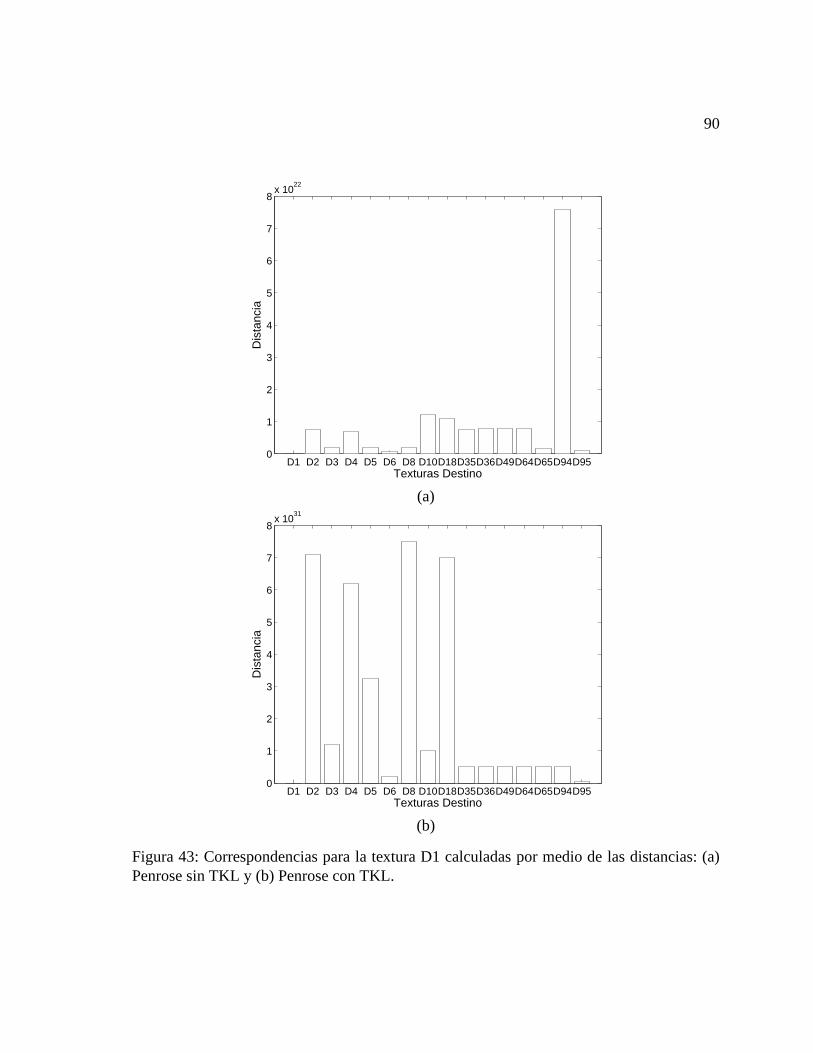
90
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
1
2
3
4
5
6
7
8x 10
22
Texturas Destino
Dis
tanc
ia
(a)
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
1
2
3
4
5
6
7
8x 10
31
Texturas Destino
Dis
tanc
ia
(b)
Figura 43: Correspondencias para la textura D1 calculadas por medio de las distancias: (a)Penrose sin TKL y (b) Penrose con TKL.
91
De este experimento, como se ilustra en la figura 43, se puede determinar que la mejor dis-
criminación entre una imagen fuente (en este caso D1) y otrasimágenes destino se obtiene al
utilizar la métrica de Penrose entre características obtenidas al aplicar la TKL .
4.3.2. Experimento 6
En este experimento se calculan las correspondencias entrelas imágenes fuente D2 y D35
con las imágenes destino D1, D2, D3, D4, D5, D6, D8, D10, D18, D35, D36, D49, D64,
D65, D94 y D95. La correspondencia entre las texturas se calculó utilizando la distancia de
Penrose con 5 componentes principales. El resultado del cálculo de estas correspondencias
se muestra en la figura 44.

92
D1 D2 D3 D4 D5 D6 D8 D10 D18 D35 D36 D49 D64 D65 D94 D950
0.5
1
1.5
2
2.5
3
3.5
4x 10
31
Textura Destino
Dis
tanc
ia
(a)
D1 D2 D3 D4 D5 D6 D8 D10D18D35D36D49D64D65D94D950
0.5
1
1.5
2
2.5x 10
31
Texturas Destino
Dis
tanc
ia
(b)
Figura 44: Correspondencia calculada (a) para la imagen D2 yla imagen (b) D35.

93
De este experimento podemos determinar que las texturas quemás se parecen a (empata con)
D2 son la imagen D5 seguida por D18. Así mismo, para la texturaD35, la más parecida
resulta ser la D36.
4.3.3. Experimento 7
En este experimento se calculan las correspondencias entrela imagen fuente D5 con las
imágenes destino D65, D94, D95, D5pert y D94pert y la imagen fuente D94 con las imágenes
destino D94r1, D94r2 y D94r3. La correspondencia entre las texturas se calculó utilizando
la distancia de Penrose con 5 componentes principales. El resultado del cálculo de estas
correspondencias se muestra en la figura 45.

94
D65 D94 D95 D5pert D94r10
2
4
6
8
10
12
14
16
18x 10
30
Texturas Destino
Dis
tanc
ia
(a)
D94r1 D94r2 D94r30
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
29
Texturas Destino
Dis
tanc
ia
(b)
Figura 45: (a) Correspondencia entre la imagen D5 y varias texturas Brodatz. (b) Correspon-dencia entre D94 y texturas D94 de Brodatz con varios nivelesde ruido Gaussiano.

95
De este experimento podemos deteminar que el empatamiento entre texturas con perturba-
ciones es posible. Esto se deduce después de observar cómo laimagen D5 es empatada a
la imagen D5pert en la figura 45 (a). De igual manera podemos observar en 45 (b) la gran
similitud entre la imagen D94 y ella misma con varios nivelesde ruido Gaussiano.
4.4. Experimentos con imágenes de sedimentos laminados
Para los siguientes experimentos se utilizaron imágenes desedimentos laminados. A partir de
las imágenes de la figura 7 se obtuvieron regiones de 112x112 pixeles cada uno para formar
nuestras imágenes de pruebas (figura 46). Estas imágenes fueron suministradas al sistema
para encontrar algunas correspondencias entre ellas. También, se perturbaron algunas de estas
imágenes para mostrar la sensibilidad del sistema (figura 47).

96
S1 S2 S3 S4
S5 S6 S7 S8
S9 S10 S11 S12
S13 S14 S15 S16
S17 S18 S19 S20
Figura 46: Imágenes de prueba de sedimentos laminados

97
S5pert S14r1 S14r2 S14r3
Figura 47: Imágenes perturbadas de prueba de sedimentos laminados. A la imagen S14 se leañadió ruido Gaussiano con� = 10 (S14r1),� = 20 (S14r2b) y� = 30 (S14r3), respectiva-mente.
4.4.1. Experimento 8
En este experimento se calculan las correspondencias entrela imagen fuente S14 con las
imágenes destino S14r1, S14r2 y S14r3, y la imagen fuente S5 con las imágenes destino
S5pert, S14r1, S14r2 y S14r3. La correspondencia entre las texturas se calculó utilizando
la distancia de Penrose con 5 componentes principales. El resultado del cálculo de estas
correspondencias se muestra en la figura 48.

98
S5pert S14r1 S14r2 S14r30
0.5
1
1.5
2
2.5
3x 10
30
Texturas Destino
Dis
tanc
ia
(a)
S14r1 S14r2 S14r30
0.5
1
1.5
2
2.5
3
3.5x 10
29
Texturas Destino
Dis
tanc
ia
(b)
Figura 48: (a)Correspondencia calculada entre la textura S5pert y otras texturas de sedimentoslaminados. (b) Correspondencia calculada entre la imagen de sedimentos laminados S14 yS14 con varios niveles de ruido.

99
De este experimento podemos determinar que el empatamientoentre texturas de sedimentos
laminados con perturbaciones es posible. Esto se deduce después de observar cómo la imagen
S5 es empatada a la imagen S5pert en la figura 48 (a). De igual manera podemos notar que
entre más grande sea el nivel de ruido entre dos imágenes, mayor será la distancia entre
ellas ya que para el caso de la imagen S14 la menor distancia (empatamiento) resultó con
la imagen S14r1 (figura 49 (b)) mientras que con las imágenes S14r y S14r2 las distancias
incrementaron, respectivamente.
4.4.2. Experimento 9
En este experimento se calculan las correspondencias entrela imagen fuente S1 con las imá-
genes destino S1, S2, S3, S4, S5,S6 y S7, y la imagen fuente S16con las imágenes destino
S9, S10, S12, S14, S16, S18 y S20. La correspondencia entre las texturas se calculó utilizan-
do la distancia de Penrose con 5 componentes principales. Elresultado del cálculo de estas
correspondencias se muestra en la figura 49.

100
S1 S2 S3 S4 S5 S6 S70
1
2
3
4
5
6
7
8x 10
28
Texturas Destino
Dis
tanc
ia
(a)
S9 S10 S12 S14 S16 S18 S200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
31
Texturas Destino
Dis
tanc
ia
(b)
Figura 49: (a)Correspondencia calculada entre la textura S1 y otras texturas de sedimentoslaminados. (b) Correspondencia calculada entre la imagen S16 y otros sedimentos laminados.

101
De este experimento podemos deducir que el empatamiento de la imagen S1 resulta con la
imagen S5. Esto debido a que la distancia entre ellas es menorque la distancia entre S1 y
cualquier otra imagen destino. De igual manera el empatamiento de la imagen S16 se da con
la imagen S18.
4.4.3. Experimento 10
En este experimento se analizan las dos imágenes de sedimentos laminados que se muestran
en la figura 50. Estas imágenes de sedimentos laminados son ligeramente distintas, sin em-
bargo, pertenecen al mismo sitio. El objetivo del experimento es mostrar cómo se realiza el
procedimiento de anclar puntos de una imagen como la imagen 50 (b) con la ayuda de otra,
como la imagen 50 (a).

102
(a) (b)
Figura 50: Imágenes distintas de sedimentos laminados pertenecietes a un mismo sitio. Laimagen (a) servirá para anclar dos puntos de la imagen (b).
Para este exerimento realizamos los siguientes pasos:
1. Seccionamos las imágenes involucradas en 35 cuadros (7 renglones y 5 columnas)
como se ilustra en la figura 51;
2. Luego, se elige un cuadro de la primera columna de la imagende la figura 50 (b) y
se busca uno que le corresponda en la primera columna de la imagen de la figura 50
(a). Esto se realiza para un cuadro de cada columna restante de 50 (b). Al terminar este
procedimiento, hemos situado la primer ancla.
3. Luego, se procede a realizar lo mismo pero para otro cuadrode la primera columna,
esto para fijar una segunda ancla.

103
(a) (b)
Figura 51: Imágenes seccionadas en 7 renglones y 5 columnas,respectivamente. Estas imá-genes sirven como base para realizar búsquedas de correspondencias entre las secuenciassedimentarias.
El resultado de aplicar el esquema propuesto para anclar puntos en imágenes de sedimentos
laminados por medio de la búsqueda de correspondencias entre estructuras sedimentarias se
muestra en las gráficas de las figuras 52 y 53, respectivamente.
En este caso, para anclar el primer punto, se buscaron las correspondencias entre cada textura
contenida en los cuadros del tercer renglón de la imagen de lafigura 51 (a) y las texturas
contenidas en la imagen de la figura 51 (b). De la misma manera,para anclar el segundo
punto, se buscaron las correspondencias entre cada texturacontenida en los cuadros del quinto
renglón de la imagen de la figura 51 (a) y las texturas contenidas en la imagen de la figura 51
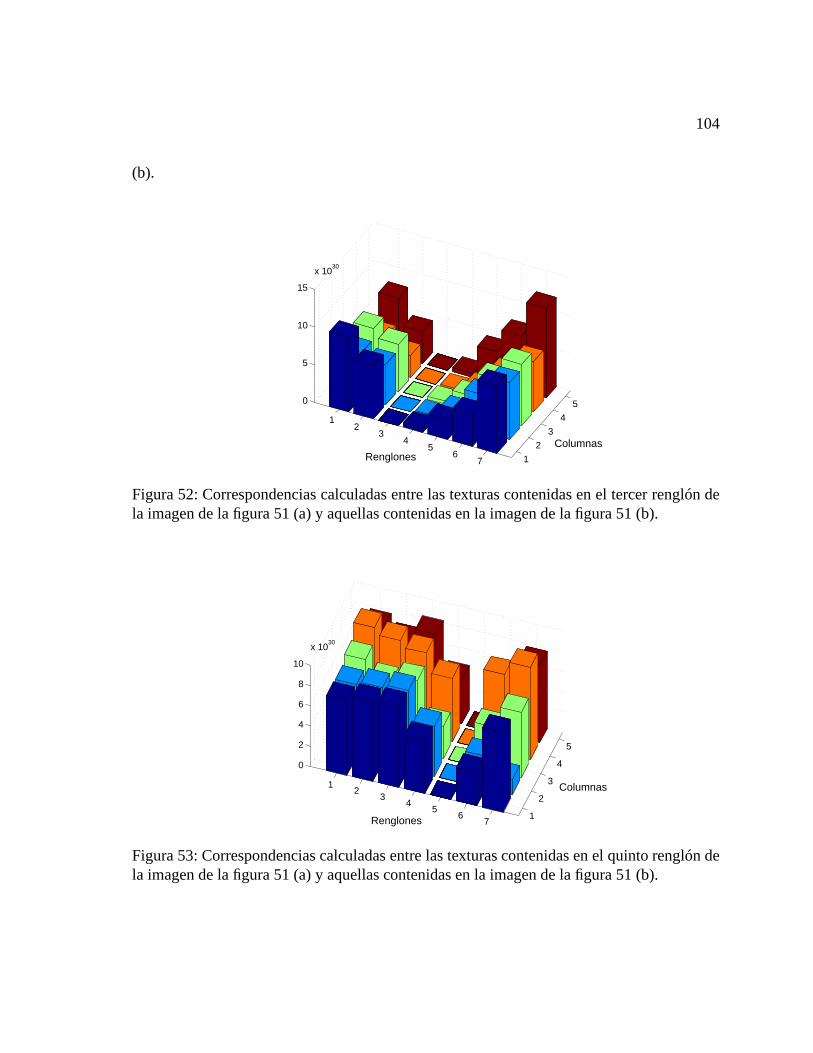
104
(b).
1
2
3
4
5
12
34
56
7
0
5
10
15
x 1030
ColumnasRenglones
Figura 52: Correspondencias calculadas entre las texturascontenidas en el tercer renglón dela imagen de la figura 51 (a) y aquellas contenidas en la imagende la figura 51 (b).
1
2
3
4
5
12
34
56
7
0
2
4
6
8
10
x 1030
Columnas
Renglones
Figura 53: Correspondencias calculadas entre las texturascontenidas en el quinto renglón dela imagen de la figura 51 (a) y aquellas contenidas en la imagende la figura 51 (b).

Capítulo 5
Conclusiones y contribuciones
Las conclusiones y contribuciones más importantes de este trabajo se describen a continua-
ción:
El problema de encontrar correspondencias entre texturas yen particular el de encon-
trar la correspondencia entre imágenes de texturas formadas por sedimentos laminados
ha sido considerado usando como herramienta los filtros Gabor y el análisis de compo-
nentes principales.
El sistema propuesto para encontrar empatamiento consisteen tomar imágenes, apli-
carlas a un banco de filtros Gabor, realizar un posprocesado ycompararlas en base a un
análisis de componentes principales.
El sistema propuesto para el análisis de contigüidad consiste en formar una imagen
compuesta, aplicar un filtro Gabor, realizar un postprocesado y en la imagen resultante
buscar discontinuidades o saltos.
105

106
De los experimentos realizados podemos concluir que el uso de filtros Gabor es de
gran utilidad para el análisis de texturas. Esto debido a su baja sensibilidad a ruido y
perturbaciones, así como a su sensibilidad en orientación,que permite la detección de
cambios locales en orientación de las texturas de sedimentos laminados.
Se realizaron experimentos com imágenes de texturas y de sedimentos laminados en-
contrando que es posible realizar labores de búsqueda de correspondencia en imágenes,
distinguiendo entre imágenes de sitios distintos y logrando encontrar aquellos sitios con
textura contigua.
Se ha propuesto un método, software programado en Java, y esquema de configuración
para encontrar la correspondencia entre texturas.

Bibliografía
Ahuja, N. 1982. "Dot Pattern Processing Using Voronoi Neighborhoods". IEEE Transactionson Pattern Analysis and Machine Intelligence. 4(3):336-343 p.
American Cancer Society. 2003. Çancer Facts and Figures". http://www.cancer.org
Azencott, R., J.-P. Wang y L. Younes. 1997. "Texture Classification Using WindowedFourier Filters". IEEE Transactions on Pattern Analysis and Machine Intelligence.19(2):148-153 p.
Baumgartner, T., L. Sautter and V. Ferreira Bartrina. 1992.Reconstruction of the Historyof Pacific Sardine and Northern Anchovy Populations Over thePast Two Millennia fromSediments of the Santa Barbara Basin, California". CalCOFIReports. 33:24-40 p.
Bishop, C.M. 1996. "Neural Networks for Pattern Recognition". Oxford University Press.Primera edición. Oxford. 475 pp.
Blakemore, C. y F.W. Campbell. 1969. .On the Existence of Neurons in the Human Visu-al System Selectively Sensitive to the Orientation and Sizeof Retinal Images". Journal ofPhysiology. 203:237-260 p.
Bowyer, K.W. y P.J. Phillips. 1998. "Empirical Evaluation Techniques in Computer Vision".Wiley-IEEE Computer Society Press. Primera edición. Hoboken. 248 pp.
Bracewell, R.N. 1999. "The Fourier Transform and its Applications". McGraw-Hill. Terceraedición. Nueva York. 640 pp.
Brodatz. 1966 "Textures: A Photographic Album for Artists and Designers"Dover, NY.
107

108
Campbell, F.W. y J.G. Robson. 1968. .Application of Fourier Analysis to the Visibility ofGratings". Journal of Physiology. 197:551-566 p.
Casasent, D.P. 1995. "Gabor Wavelet Filters and Fusion for Distortion-Invariant Multi-ClassObject Detection". En: Harold Szu (ed.). Proceedings SPIE.Orlando FL. EUA. 2491:430-440p.
Casasent, D.P. y J.-S. Smokelin. 1994. Real, Imaginary, andClutter Gabor Filter Fusion forDetection with Reduced False Alarms". Optical Engineering. 33(7):2255-2363 p.
Casasent, D.P. y J.-S. Smokelin. 1994. "Neural Net Design ofMacro Gabor WaveletFilters for Distortion-Invariant Object Detection in Clutter". Optical Engineering. 33(7):2264-2271 p.
Chaney, R.D. 1993. "Feature Extraction Without Edge Detection". PhD thesis. Departmentof Electrical Engineering and computer Science. Massachusetts Institute of Technology. 157pp.
Chantler, M.J. 1994. "The Effect of Variation in IlluminantDirection on Texture Classifica-tion". PhD thesis. Department of Computing and Electrical Engineering. Heriot-Watt Univer-sity. 178 pp.
Chellappa, R. y S. Chatterjee. 1985. Çlassification of Textures Using Gaussian MarkovRandom Fields". IEEE Transactions on Acoustic, Speech, andSignal Processing. 33(4):959-963 p.
Coggins, J.M. 1982. .A Framework for Texture Analysis Based on Spatial Filtering". Ph.D.thesis. Computer Science department. Michigan State University.
Cohen, F.S. y D.B. Cooper. 1987. "Simple Parallel Hierarchical and Relaxation Algorithmsfor Segmenting Noncausal Markovian Random Fields". IEEE Transactions on Pattern Anal-ysis and Machine Intelligence. 9(2):195-219 p.
Cross, G.C. y A.K. Jain. 1982. "Markov Random Field Texture Models". IEEE Transationson Pattern Analysis and Machine Intelligence. 5(1):25-39 p.
Chan, C.-C. y C.-C. Chen. 2000. "Gabor Transforms in TextureAnalysis". En: David P.Casasent(eds.).Proceedings of SPIE. Boston MA. EUA. 2353:237-245 p.
Daugman, J.G. 1984. "Spatial Visual Channels in the FourierPlane". Vision Research.24(9):891-1117 p.

109
Daugman, J.G. 1985. Üncertainty Relation for Resolution inSpace, Spatial Frequency, andOrientation Optimized by Two-Dimensional Visual CorticalFilters". Journal of the OpticalSociety of America. 2(7):1160-1169 p.
De Valois, R.L., D.G. Albrecht y L.G. Thorell. 1989. "Spatial-Frequency Selectivity of Cellsin Macaque Visual Cortex". Vision Research. 22(5):545-559p.
Dunn, D.F. y W.E. Higgins. 1995. .Optimal Gabor Filters for Texture Segmentation". IEEETransactions on Image Processing. 4(7):947-964 p.
Dunn, D.F., W.E. Higgins y J. Wakeley. 1994. "Texture Segmentation Using 2-D GaborElementary Functions". IEEE Transactions on Pattern Analysis and Machine Intelligence.22(2):130-149 p.
Farrokhnia, F. 1990. "Multichannel Filtering Techniques for Texture Segmentation and Sur-face Quality Inspection". Ph.D. thesis. Michigan State University.
Ferwerda, J.A. 2001. "Elements of Early Vision for ComputerGraphics". IEEE ComputerGraphics and Applications. 21(5):22-33 p.
Gabor, D. 1946. "Theory of Communication". Journal of the Institution of Electrical Engi-neers. 93(3):429-457 p.
Geman, S. y D. Geman. 1984. "Stochastic Relaxation, Gibbs Distributions, and the BayesianRestoration of Images". IEEE Transactions on Pattern Analysis and Machine Intelligence.6(6):721-741 p.
González, R.C. y R.E. Woods. 1996. "Tratamiento Digital de Imágenes". Addison-Wesley.Primera edición. Wilmington. 773 pp.
Gulsrud, T.O. y J.H. Husøy. 2000. .Optimal Filter for Detection of Clustered Microcalcifica-tions". En: A. Sanfeliu, J.J. Villanueva, M. Vanrell, R. Alquezar, A.K. Jain, y J. Kittler (eds.).Proceedings of the 15th International Conference on Pattern Recognition. Barcelona, España.1:508-511 p.
Gulsrud, T.O. y E. Løland. 1996. "Multichannel Filtering for Texture Feature Extraction inDigital Mammograms". En 18th Annual International Conference of the IEEE Engineeringin Medicine and Biology Society. Amsterdam, Los Países Bajos. 357-358 p.
Haralick, R., K. Shanmugam e I. Dinstein. 1973. "Textural Features for Image classification".IEEE Transactions on Systems, Man, and Cybernetics, 3(6):610-621 p.

110
Howell, K.B. 2001. "Principles of Fourier Analysis". CRC Press. Boca Raton. 792 pp.
Hu, M.K. 1962. "Visual Pattern Recognition by Moment Invariants". IRE Transactions onInformation Theory. 8:179-187 p.
Hubel, D.H., T. Wiesel. 1962. Receptive Fields, Binacular Interaction, and Functional Archi-tecture in the Cat’s Visual Cortex". Journal of Physiology.160:106-154 p.
Hubel, D.H. y T. Wiesel. 1974. "Sequence Regularity and Geometry of Orientation in theMonkey Striate Cortex". Journal of Comparative Neurology.158:267-293 p.
Jähne, B. y H. Hau�ecker. 2000. Çomputer Vision and Applications, A Guide for Studentsand Practitioners". Academic Press. Primera edición. Londres. 679 pp.
Jain, A. K. y F. Farrokhnia. 1991. Ünsupervised Texture Segmentation Using Gabor Filters".Pattern Recognition. 24(12):1167-1186 p.
Jain, A.K., S.K. Bhattacharjee e Y. Chen. 1992. .On Texture in Document Images". En Pro-ceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Champaign,IL. 677-680 p.
Khotanzad, A. y R. Kashyap. 1987. "Feature Selection Based on Image Sysnthesis". IEEETransactions on Systems, Man, and Cybernetics, 17:1087-1095 p.
Kubota, T. y T. Huntsberger. 1998. .Adaptive Pattern Recognition System for Scene Segmen-tation". Optical Engineering, 37(3):829-835 p.
Kumar, A. y G. Pang. 2000. "Fabric Defect Segmentation UsingMultichannel Blob Detec-tors". Optical Engineering. 39(12):3176-3190 p.
Kulikowsky, J.J., S. Marcelja y P. Bishop. 1982. "Theory of Spatial Position and SpatialFrequency Relations in the Receptive Fields of Simple Cellsin the Visual Cortex". BiologicalCybernetics. 43:187-198 p.
Laws, K.I. 1980. "Textured Image Segmentation". Ph.D. thesis. University of Southern Cali-fornia.
Li, S.Z. 2001. "Markov Random Field Modeling in Computer Vision". Springer Verlag. Se-gunda edición. New York. 323 pp.
Malik, J. y P. Perona. 1994. "Prettentive Texture Discrimination with Early Vision Mecha-nisms". Journal of the Optical Society of America A. 7(5):923-932 p.

111
Manly, B.F.J. 1994."Multivariate Statistical Methods: A Primer". CRC Press. Segunda edi-ción. Boca Raton. 232 pp.
Marcelja, S. 1980. "Mathematical Description of the Response of Simple Cortical Cells".Journal of the Optical Society of America. 70(11):1297-1300 p.
Mao, J. y A.K. Jain. 1992. "Texture Classification and Segmentation Using MultiresolutionSimultaneous Autoregressive Models". Pattern Recognition. 25(2):173-188 p.
Mather, P.M. 1999. Çomputer Processing of Remotely-SensedImages: An Introduction".John Wiley & Sons. Segunda edición. New York. 306 pp.
Mallat, S.G. 1989. "Multifrequency Channel Decompositionof Images and Wavelet Models".IEEE Transactions on Acoustics, Speech, and Signal Processing. 37(12): 2091-2110 p.
Nakamura, S. 1991. "Metodos Numéricos Aplicados con Software". Prentice Hall,Inc. En-glewood Cliffs. Primera edición. 570 pp.
Paget, R. y D. Longstaff. 1996. .A Nonparametric Multiscale Markov Random Field Modelfor Synthesising Natural Textures". En 4th International Symposium on Signal Processingand its Applications. 2:744-747 p.
Prasad, L., S.S. Iyengar y S.S. Ayengar. 1997. "Wavelet Analysis with Applications to ImageProcessing". CRC Press. Prinera edición. Boca Ratón. 279 pp.
Press, W.H., S.A. Teukolsky, W.T. Vetterling y B.P. Flannery. 1992. "Numerical Recipes in C:The Art of Scientific Computing". Cambridge University Press. Segunda edición. Cambridge.994 pp.
Ramstad, T.A., S.O. Aase y J.H. Husøy. 1995. "Subband Compression of Images: Principlesand Examples". ELSEVIER Science Publishers. Amsterdam. 394 pp.
Randen, T. y J.A. Husøy. 1994. "Multichannel Filtering for Image Texture Segmentation".Optical Engineering. 33(8):2617-2625 p.
Randen, T. 1997. "Filter and Filter Bank Design for Image Texture Recognition". Disserta-tion submitted in partial fullfilment of the requirements for the degree of Doktor Ingenior.Norwegian University of Science and Techology. Stavanger College.
Randen, T. y J.A. Husøy. 1999. "Filtering for Texture Classification: A Comparative Study".IEEE Transactions on Pattern Analysis and Machine Intelligence. 21(4):291-310 p.

112
Real Academia Española. 2001. Diccionario de la Lengua Española. Vigésima seguna edi-ción. Madrid, Real Academia Española.
Reineck, H.-E. e I.B. Singh. 1981. "Depositional Sedimentary Environments, With Referenceto Terrigenous Clastics". Springer Verlag. Segunda Edición. New York. 551 pp.
Schaaf, M. 1995. "Digital Sediment Color Analyses-Development and Application toHolocene and Late Pleistocene Sediments from East Pacific DSDP/ODP Sites". Disserta-tion zur Erlangung des Doktorgrades (Dr. rer. nat.) der Fakultat fur Geowissenschaften derRuhr-Universitat Bochum.
Shi, B.E. 1998. "Gabor-Type Filtering in Space and Time withCellular Neural Net-works". IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applica-tions. 45(2):121-132 p.
Soutar, A. y J.D. Isaacs. 1969. "History of Fish PopulationsInferred from Fish Scales inAnaerobic Sediments off California". CalCOFI Reports. 15:49-51 p.
Soutar, A. y J.D. Isaacs. 1974. .Abundance of Pelagic Fish During the 19th and 20thCenturies as Recorded in Anaerobic Sediment of the Californias". Fishery Bulletin.72:257-273 p.
Sutton, R. D. y E. L. Hall. 1972. "Texture Measures for Automatic Classification of Pul-monary Disease". IEEE Transactions on Computers. (21)7:667-676 p.
Tamura, H., S. Mori e Y. Yamawaki. 1978. "Textural Features Corresponding to Visual Per-ception". IEEE Transactions on System, Man, and Cybernetics. 8(6):460-472 p.
Therrien, C.W. 1983. .An Estimation-Theoretic Approach to Terrain Image Segmentation".Computer Vision, Graphics, and Image Processing. 22:313-326 p.
Tuceryan, M. y A.K. Jain. 1990. "Texture Segmentation UsingVoronoi Polygons". IEEETransactions on Pattern Analysis and Machine Intelligence. (12)2:211-216 p.
Tuceryan, M. y A.K. Jain. 1998. "Texture Analysis". En: C.H.Chen, L. F. Pau, P.S.P. Wang(eds.). "The Handbook of Pattern Recognition and Computer Vision". World Scientific Pub-lishing Co. Segunda edición. 235-276 p.
Unser, M. 1995. "Texture Classification and Segmentation Using Wavelet Frames". IEEETransactions on Image Processing. 4(11):1549-1560 p.
Weber, D. y D.P. Casasent. 1995. "Fusion and Optimized GaborFilter Design for ObjectDetection". En Proceedings SPIE 2588: 662-675 p.

113
Weldon, T.P. y W.E. Higgins. 1996. "Integrated Approach to Texture Segmentation UsingMultiple Gabor filters". En Proceedings of the International Conference on Image Processing.3:955-958 p.
Copyright © 2022 FDOKUMEN