DISENO DE UNA HERRAMIENTA PARA LA EVALUACION DE LA CALIDAD DE SERVICIO DE OPERADORES LOGISTICOS
Upload
independentCategory
view
0download
0
Instituto Politécnico Nacional
Escuela Superior de Ingeniería Mecánica y Eléctrica
Sección de Estudios de Posgrado e Investigación
ANÁLISIS Y DISEÑO DE UNESTABILIZADOR DIFUSO PARA UN ROBOT
BÍPEDO
T E S I SQUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
PRESENTA:
ING. CRISTÓBAL LÓPEZ DE JESÚS
DIRECTOR DE TESIS:
DR. JESÚS ALBERTO MEDA CAMPAÑA
MÉXICO, D.F. 2012

Cristóbal López De Jesús Página II
RESUMEN
En este trabajo se propone el diseño de un sistema para el control de un Robot Bípedo(Bioloid) en el plano coronal. El control permitirá estabilizar el Robot cuando se presenteuna perturbación externa en el plano mencionado.
El Robot Bípedo Bioloid cuenta con 18 grados de libertad distribuidos en brazos, hombros,piernas y cadera, de los cuales los brazos tienen una restricción cinemática: mantendrán unaposición rígida de modo que no afecten significativamente la dinámica del Robot, ya que elestudio sólo considerará las piernas para la estabilización en el plano coronal, al presentarseuna perturbación externa.
Para el diseño del controlador se utilizó el control lógico difuso, debido a su flexibilidadpara manejar valores intermedios en las variables de entrada y salida; Con esta forma decontrol, podremos lograr que el sistema pueda ajustarse a condiciones de cambio, que enocasiones son imposibles de predecir, por la naturaleza del ambiente, dentro de ciertosrangos establecidos.
Dentro de los resultados se han propuesto situaciones de inestabilidad particulares para elRobot Bípedo, por ejemplo condiciones iníciales fuera del punto de equilibrio,perturbaciones externas y fallas en algún servomotor. Los resultados obtenidos soncomparados con el sistema de control PID, observando un resultado notable de respuesta deestabilización con el control propuesto en todos los casos mencionados.
Cristóbal López De Jesús Página III
ABSTRACT
This paper proposes the design of a system for control of a Biped Robot (Bioloid) in thecoronal plane. The control will stabilize the robot where an external disturbance on theplane mentioned.
The Bioloid Bipedal Robot has 18 degrees of freedom distributed on arms, shoulders, legsand hips, arms of which have a kinematic constraint: maintain a rigid position so as not tosignificantly affect the dynamics of the robot, since the study only considered for thestabilization legs in the coronal plane, at the instance an external disturbance.
For the controller design was used Fuzzy Logic Control because of its flexibility to handleintermediate values in the input and output variables; With form of control, we make thesystem can adjust to changing conditions, which are sometime impossible to predict, by thenature of the environment, within certain ranges set.
Among the results have proposed instability for Biped Robot particular, such initialconditions out of equilibrium, external disturbances and faults in a servomotor. The resultsobtained are compared to the PID control system, observing a remarkable result ofstabilization response to the proposed control in all the above case.
Cristóbal López De Jesús Página IV
AGRADECIMIENTOS
Al CONACYT por el apoyo económico para realizar esta maestría ya que es de vitalimportancia contar con un sustento para realizar cualquier trabajo.
A la SEPI ESIME ZACATENCO del INSTITUTO POLITÉCNICO NACIONAL pordarme la formación académica para realizar este trabajo.
Al Dr. Jesús Alberto Meda Campaña, por asesórame todo este tiempo.
A MIS SINODALES integrados por el Dr. Jesús Alberto Meda Campaña, Dr. ValeriyNosov, Dr. Julio César Gómez Mancilla, Dr. Iván Enrique Campos Silva y Dr. José ÁngelLodegario Ortega Herrera, a todos ellos por su observaciones para este trabajo.
Y a mis amigos Tonatiuh Hernández Cortes y Jorge Blanquet Matínez.
Cristóbal López De Jesús Página V
INDICE
RESUMEN II
ABSTRACT III
AGRADECIMIENTOS IV
ÍNDICE V
ÍNDICE DE FIGURAS IX
NOMENCLATURA XII
OBJETIVO GENERALES XIV
JUSTIFICACIÓN XIV
ALCANCE XV
METODOLOGÍA XV
CAPÍTULO I.- ESTADO DEL ARTE.
1 Introducción. 1
1.1 Robot bípedo. 2
1.2 Primeras investigaciones. 3
1.3 Proyectos comerciales. 4
1.4 Robots comerciales de bajo costo. 5
1.5 Robot Bioloid. 7
Cristóbal López De Jesús Página VI
CAPÍTULO II.-DISEÑO DEL MODELO ROBOT BIPEDOBIOLOID.
2. Introducción. 9
2.1 Restricciones para construir el modelo en Simulink. 10
2.2 Construcción modelo. 13
2.2.1 Dimensiones de componentes. 13
2.2.2 Dimensiones Robot Bípedo Bioloid armado. 14
2.2.3 Modelo en SolidWorks. 15
2.2.4 Modelo en Simmechanics 16
2.2.4.1 Modelado de las piernas. 17
2.3 Modelo Robot Bípedo Bioloid Simmechanics. 20
2.4 Articulaciones en el modelo Simmechanics. 21
2.5 Conexión de sensores en las articulaciones. 22
2.5.1 Bloques de articulaciones con Controlador Difuso. 23
2.5.2 Bloques de articulaciones con Controlador PID. 25
CAPÍULO III.-DISEÑO CONTROLADOR DIFUSO YPID.
3. Diseño de los controladores. 27
3.1 Conjuntos. 27
3.2 Control Difuso. 28
3.3 Sistemas Tipo Mamdani. 29
3.4 Característica del sistema tipo Mamdani. 30
3.5 Sistemas Tipo Takagi Sugeno. 31
3.6 Características del sistema tipo Takagi Sugeno. 32
3.7 Controles Difuso y PID. 33
3.8 Diseño del control difuso. 34
Cristóbal López De Jesús Página VII
3.9 Definición de variables. 35
3.9.1 Articulación ID_18. 36
3.9.2 Posición Angular. 37
3.9.3 Velocidad Angular. 37
3.9.4 Torque. 38
3.10 Articulación ID_9. 39
3.10.1 Posición angular. 40
3.10.2 Velocidad angular. 40
3.10.3 Torque. 41
3.11 Evaluación de reglas. 42
3.11.1 Evaluación de reglas bloque F8. 42
3.11.2 Evaluación de reglas bloque F9. 44
3.12 Controlador PID. 46
3.12.1 Valores PID para la articulación ID_18. 46
3. 12.2 Valores PID para la articulación ID_9. 47
CAPITULO IV.-RESULTADOS.
4. Simulación sin control. 48
4.1 Posición de equilibrio natural del modelo sin control debido a su centro de
gravedad. 50
4.1.1 Simulación con articulaciones ID_18 = 15° sin control e ID_9 en posición
rígida. 51
4.2 Simulación con control en articulación ID_9. 53
4.2.1 Simulación con articulaciones ID_18 = 15° sin control e ID_9 con control con unaseñal de referencia de 30°. 53
4.2.2 Simulación con articulaciones ID_18 = 16° sin control e ID_9 con control con unaseñal de referencia de 40°. 56
Cristóbal López De Jesús Página VIII
4.2.3 Simulación con articulaciones ID_18 = 17° sin control e ID_9 con control con unaseñal de referencia de 40°. 59
4.2.4 Simulación con articulaciones ID_18 = 17° sin control e ID_9 con control con unaseñal de referencia 50°. 60
4.2.5 Simulación con articulaciones ID_18 = 18° sin control e ID_9 con señal dereferencia 50°. 63
4.3 Implementación de control en articulación ID_18 e ID_9. 64
4.3.1 Simulación con articulaciones ID_18 con control e ID_9 con señal de
referencia 50°. 64
4.3.2 Simulación con articulaciones ID_18 con control e ID_9 con señal de
referencia 50°. 67
4.4 Modelo simulado con una perturbación externa. 71
4.4.1 Simulación con articulaciones ID_18 con control e ID_9 con señal de
referencia 30° y perturbación externa. 71
CAPITULO V.-ANÁLISIS DE RESULTADOS.
5. Resultados sin control. 75
5.1 Articulaciones ID_18 e ID_9 sin control sujetos a la fuerza de gravedad. 75
5.2 Articulaciones ID_18 sin control e ID_9 en posición rígida sujetos a la fuerza degravedad. 76
5.3 Resultados con el controlador Difuso en la articulación ID_9. 77
5.4 Resultados con control Difuso en ID_18 e ID_9. 79
5.5 Análisis de resultados de los controladores Difuso y PID ante una perturbaciónexterna. 81
CAPITULO VI.-CONCLUSIONES.
6.1 Conclusiones. 83
6.2 Trabajos futuros. 84
Cristóbal López De Jesús Página IX
REFERENCIAS 85
APÉNDICES
A1.- Planos anatómicos del cuerpo humano. 87
B1.- Momentos de inercia. 88
B2.- Dimensiones especificas Robot Bípedo Bioloid. 91
B3.- Dimensiones completas Ro bot Bípedo Bioloid. 92
C1.- Servomotor Dynamixel AX-12 y AX-18F. 93
C2.- CM-510. 96
D1.- Código Control Difuso articulación ID_18. 97
D2.- Código Control Difuso articulación ID_9. 97
INDICE DE FIGURAS Pág.
Figura 1. 1. Robot bípedo bioloid. 2Figura 1. 2. Primeros modelo de robot bípedos realizados por kajita. 3Figura 1. 3. Robots bípedos usados en los experimentos de kajita. 4Figura 1. 4. Robot humanoide asimo de honda. 5Figura 1. 5. Robosapien v1robot de recreación infantil. 6Figura 1. 6. Robosapien v2 con visión infrarroja. 6Figura 1. 7. Robot bioloid. 7Figura 1. 8. Servomotor AX-18F Y AX-12+. 7Figura 1. 9. Módulo CM-510. 8Figura 1. 10. Modulo AX-S1. 8
Figura 2. 1. Robot bioloid, ubicación de los grados de libertad 9Figura 2. 2. Posición frontal brazos extendidos. 10Figura 2. 3. División anatómica en planos del cuerpo. 11Figura 2. 4. Plano coronal del modelo. 11Figura 2. 5. Localización de servomotores 12Figura 2. 6. Vista coronal (frontal) del modelo en 12
Cristóbal López De Jesús Página X
Figura 2. 7. Plano pieza BPF-F4, compone parte de la rodilla. 13Figura 2. 8. Dimensiones robot bípedo bioloid. 14Figura 2. 9. Tensor de inercia del torso con los brazos extendidos. 15Figura 2. 10. Bloque machine enviroment. 16Figura 2. 11. Bloque ground. 16Figura 2. 12. Modelo robot bípedo bioloid con pierna izquierda anclada. 16Figura 2. 13. Piernas robot bioloid. 17Figura 2. 14. Bloque body, configuración. 17Figura 2. 15. Secciones del modelo robot bípedo bioloid. 18Figura 2. 16. Articulaciones en las piernas. 18Figura 2. 17. Bloque revolute. 19Figura 2. 18. Bloque weld. 19Figura 2. 19. Modelo robot bípedo bioloid. a) bloque simulink piernas, 20Figura 2. 20. Articulaciones móviles modelo simmechanics. 21Figura 2. 21. Bloque de articulación ID_18. 22Figura 2. 22. Bloque de articulación ID_9. 22Figura 2. 23. Modelo del servomotor de la articulación ID_18, controlador difuso. 23Figura 2. 24. Modelo del servomotor de la articulación ID_9, controlador difuso. 24Figura 2. 25. Modelo del servomotor de la articulación ID_18, PID. 25Figura 2. 26. Modelo del servomotor de la articulación ID_9, PID. 26
Figura 3. 1. Funciones de membresías. 28Figura 3. 2. Diagrama de bloques control difuso. 29Figura 3. 3. Sistema tipo mamdani. 29Figura 3. 4. Fusificación velocidad de un vehículo. 30Figura 3. 5. Sistema difuso mamdani, procesamiento detallado 31Figura 3. 6. Sistema difuso sugeno, procesamiento general 32Figura 3. 7. Sistema difuso sugeno, procesamiento detallado 33Figura 3. 8. En un sistema difuso, la entrada es leída de una fuente externa y fusificada
antes de ser procesada por la lógica difusa. La salida del proceso lógico es defusificadaantes de ser mandada al dispositivo físico bajo control. Un sistema de control pid tieneuna estructura muy similar, pero sin los elementos difusos. 34
Figura 3. 9. Variables de entrada en el bloque de control difuso. 35Figura 3. 10. Lazo cerrado para la articulación ID_18. 36Figura 3. 11. Función triangular. 36Figura 3. 12. Variables de entrada y salida F8. 37Figura 3. 13. Funciones de membresía para la posición angular. 38Figura 3. 14. Función de membresía velocidad angular. 38
Cristóbal López De Jesús Página XI
Figura 3. 15. Función de membresía torque. 39Figura 3. 16. Lazo cerrado para la articulación ID_19. 39Figura 3. 17. Variables de entrada y salida F9. 40Figura 3. 18. Funciones de membresía posición angular. 41Figura 3. 19. Funciones de membresía velocidad angular. 41Figura 3. 20. Funciones de membresía torque. 42Figura 3. 21. Reglas 3D para el bloque F8 para articulación ID_18. 44Figura 3. 22. Reglas 3D para el bloque F9 para articulación ID_9. 46Figura 3. 23. Diagrama de bloque PID. 46Figura 3. 24. Lazo cerrado control PID, articulación ID_18. 47Figura 3. 25. Lazo cerrado control PID, articulación ID_18. 47
Figura 4. 1. Efecto de gravedad sobre modelo robot bípedo bioloid. 48Figura 4. 2. Resultados sin control. a) posición angular y b) torque 49Figura 4. 3. Resultados articulación ID_18 E ID_9, 50Figura 4. 4. Velocidad angular ID_18 E ID_9. 51Figura 4. 5. Resultados posición angular id_18 = 15°. a) posición angular, 52Figura 4. 6. Posición angular. ID_18, control difuso v.s. PID. 53Figura 4. 7. Resultados articulación ID_18 sin control. a) torque y b) velocidad angular. 54Figura 4. 8. Resultados articulación id_9 con control a) posición angular y b) torque. 55Figura 4. 9. Velocidad angular ID_9. Control difuso v.s. PID. 56Figura 4. 10. Resultados articulación id_18 sin control con condición a 16°, 57Figura 4. 11.velocidad angular. ID_18, control difuso v.s. PID 57Figura 4. 12. Articulación ID_9 con controlador. a) posición angular y b) torque 58Figura 4. 13. Velocidad angular ID_9. Control difuso v.s. PID. 59Figura 4. 14. Resultados con un ID_18 = 17°. a) posición angular 59Figura 4. 15. Articulación ID_18 sin control. a) posición angular y b) torque. 60Figura 4. 16.velocidad angular. Id_18, control difuso v.s. PID. 61Figura 4. 17. Articulación ID_9 con control. A) posición angular y b) torque 62Figura 4. 18. Velocidad angular ID_9. Control difuso v.s. PID. 62Figura 4. 19. Resultados con un ID_18 = 18°. Posición angular. 63Figura 4. 20. Posición angular ID_18. Control difuso v.s. PID. 64Figura 4. 21. Articulación ID_18 con control. a) torque y b) velocidad angular. 65Figura 4. 22. Articulación ID_9 con control. a) posición angular y b) torque. 66Figura 4. 23. Velocidad angular id_9. Control difuso v.s. PID. 67Figura 4. 24. Articulación ID_18 con control. Posición angular. 68Figura 4. 25. Articulación ID_18 con control. a) torque y b) velocidad angular. 69Figura 4. 26. Articulación ID_9 con control. a) posición angular y b) torque. 70
Cristóbal López De Jesús Página XII
Figura 4. 27. Velocidad angular ID_9. Control difuso v.s. PID. 70Figura 4. 28. Articulación ID_18 con control. Posición angular. 71Figura 4. 29. Articulación ID_18 con control. a) torque y b) velocidad angular. 72Figura 4. 30. Articulación ID_9 con control. a) posición angular y b) torque. 73Figura 4. 31. Velocidad angular ID_9. Control difuso v.s. PID. 74
Figura 5. 1. Articulaciones sin control, efecto de la gravedad. a) modelo y b) resultados. 75Figura 5. 2. Resultados sin control, cuando se trabaja región de estabilidad del modelo. 77Figura 5. 3. Modelo, caída libre por efecto de la gravedad. Articulación ID_9 con control
difuso. 77Figura 5. 4. Resultados articulación ID_18 sin control e ID_9 con controlador difuso. 78Figura 5. 5. Resultados, posición angulares límites de región estable 79Figura 5. 6. Modelo, con control en articulaciones ID_18 e ID_9. 80Figura 5. 7. Resultados con en el controlador instalado en ID_18. 80Figura 5. 8. Articulación ID_18. Posición angular controlador difuso y PID. 81Figura 5. 9. Articulación ID_18. A) torque y b) velocidad angular. 82
NOMENCLATURA
θ Angulo° Grados3D TridimensionalAC Corriente AlternaASIMO Advanced Step in Innovative MobilityAX-12 ServomotorAX-S1 SensorCAD Computer aided designCDG Centro de GravedadCG Centro de Gravedadcm CentímetroCM-510 Modulo de controlDC Corriente Directadeg Gradose errorF Fuerzag gravedadI Tensor de inercia

Cristóbal López De Jesús Página XIII
ID IdentificaciónKg KilogramoKd Constante derivativaKi Constante integrativaKp Constante proporcionalM Masam Metrosmm milímetrosN NewtonO OrigenPD Proporcional DerivativoPID Proporcional Integral DerivativoPWM Pulse Wide Modulations Segundost tiempov1 Versión 1v2 Versión 2x Coordenada en xy Coordenada en yz Coordenada en zτ Torque
Cristóbal López De Jesús Página XIV
OBJETIVOS GENERALES
El objetivo principal es proponer un sistema de control difuso para un robot bípedo quepermita estabilizarlo (sin generación de caminata bípeda) cuando se presente alguna fuerzade perturbación que afecte a este sistema.
Proponer un controlador difuso para el modelo del Robot Bípedo Bioloid cuando este seencuentre estático y se presente una perturbación, el controlador propuesto deberáestabilizar el modelo. También se comparará el sistema de control propuesto contra elsistema de control PID y así se obtendrá una comparación de los dos sistemas de control.
OBJETIVOS PARTICULARES
1. Diseñar el modelo de un Robot Bípedo en Simmechanics.2. Diseñar un controlador Difuso PD y PID para el modelo del robot bípedo.3. Comparar los resultados de los dos controladores Difuso PD y PID.4. Obtención de los resultados en simulación.
JUSTIFICACIÓN
Este trabajo pretende demostrar la eficiencia del control Difuso PD ya que este método decontrol no requiere el modelo matemático de la planta para implementar el control, comotambién se comparará con el algoritmo de control PID y se analizaran los resultados decada método utilizando. Para implementar y comparar los controladores antes mencionadosse pondrá a prueba el modelo con perturbaciones y condiciones iníciales fuera de la zonaestable.
Cristóbal López De Jesús Página XV
ALCANCE
Se analizarán las situaciones sólo cuando el robot bípedo esté estático y no durante lageneración de caminado bípedo, con esto se podrá apreciar la perturbación cuando el robotbípedo este parado. Se simulará el impacto de la perturbación en un solo plano es decirhacia los costados del robot bípedo (plano coronal). Para construir los estabilizadores seusarán los métodos de Control Difuso PD y PID.
METODOLOGÍA
Para la investigación propuesta será necesario seguir la siguiente metodología.
1. Obtener las dimensiones del Robot y de cada uno de sus componentes(servomotores, estructuras, tornillos y soportes), como también las masas.
2. Los momentos de inercias necesarios para el modelo en Simulink.3. Diseñar y sintonizar los controladores (Fuzzy Control PD y PID) para el modelo en
Simulink.4. Realizar las pruebas correspondientes.5. Comparar y analizar los resultados.
Cristóbal López De Jesús 1
ESTADO DEL ARTE CAPÍTULO I
CAPÍTULO IESTADO DEL ARTE
1 Introducción.
Los robots son usados actualmente en distintas facetas profesionales como puede ser lafabricación industrial, la medicina, la seguridad y defensa o la investigación espacial entreotras. Dependiendo de la tarea para la que se destine el robot, puede ser de gran importanciael tipo de movilidad que tenga, pudiendo depender el éxito de dicha tarea de la eficacia conque el robot se desenvuelva en el medio en el que trabaja.
Cuando la tarea a la que se destinan los robots requiere de movilidad, los creadores de éstoshan intentado imitar las distintas formas de desplazamiento con las que la naturaleza hadotado a los animales, incluidos los humanos.
Al dotar de movimiento con patas a un robot, debemos tener en cuenta su posición yvelocidad, pero también debemos asegurar que el robot permanezca en equilibrio y no secaiga, usando solamente el movimiento en las articulaciones mediante motores. En robotsbípedos, el desplazamiento requiere necesariamente mantener el equilibro en una de laspatas mientras la otra se mueve, lo que conlleva una inestabilidad en cada paso.
Una posible solución para asegurar la estabilidad al desplazarse ha sido aumentar el númerode patas. De esta forma, un robot de 6 patas puede sostenerse con gran estabilidad sobre 3de sus patas mientras mueve las otras 3. Para el caso de 4 patas, el movimiento es más lentoya que debe sostenerse sobre 3 y mover 1 en cada paso.
Otra vía que se ha llevado a cabo para intentar mejorar la estabilidad del robot, así comomejorar su agilidad es construirlo de tal forma que su movimiento sea lo más parecidoposible al de un humano, es decir, que sea bípedo. Para conseguir esto, los tobillos debenser móviles y, por tanto, estar dotados de motores que permitan al robot desplazarse y noperder el equilibrio.
Cristóbal López De Jesús 2
ESTADO DEL ARTE CAPÍTULO I
1.1 Robot bípedo.
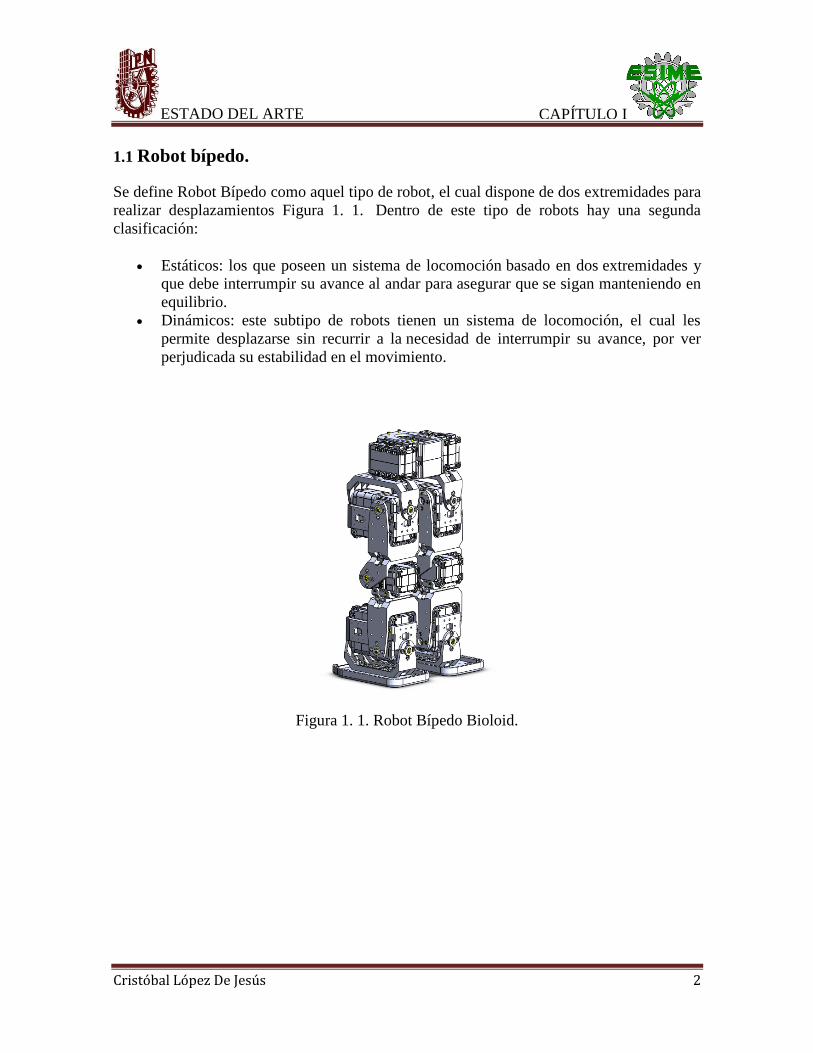
Se define Robot Bípedo como aquel tipo de robot, el cual dispone de dos extremidades pararealizar desplazamientos Figura 1. 1. Dentro de este tipo de robots hay una segundaclasificación:
Estáticos: los que poseen un sistema de locomoción basado en dos extremidades yque debe interrumpir su avance al andar para asegurar que se sigan manteniendo enequilibrio.
Dinámicos: este subtipo de robots tienen un sistema de locomoción, el cual lespermite desplazarse sin recurrir a la necesidad de interrumpir su avance, por verperjudicada su estabilidad en el movimiento.
Figura 1. 1. Robot Bípedo Bioloid.

Cristóbal López De Jesús 3
ESTADO DEL ARTE CAPÍTULO I
1.2 Primeras investigaciones.
Shuuji Kajita en el National Institute of Advanced Industrial Science andTechnology(AIST), diseñó y desarrolló un modelo casi ideal en 2-D de un robot bípedo.Kajita supuso por simplicidad que el Centro De Gravedad (CDG) del robot se muevehorizontalmente, desarrolló una ley de control para el comienzo, continuidad y finalizacióndel proceso de caminado. Figura 1. 2 muestra los primeros robots bípedos de Kajita [1].
Figura 1. 2. Primeros modelo de robot bípedos realizados por Kajita.
Zhen propuso un esquema para posibilitar al robot subir superficies inclinadas. Esto serealizó por medio de sensores de fuerza colocados en los pies del robot; la transición deltipo de terreno puede ser detectada y entonces compensar la inclinación generando losmovimientos apropiados en los motores. Usando otra propuesta, Zhen utiliza la inclinaciónde la estructura mecánica como una medida indirecta del CDG para controlar los pasos enel caminado [1].
La interpolación cúbica es usada por muchos investigadores como generador de pasos parael robot bípedo. Shin y Huang han usado polinomios cúbicos para general la trayectoria dela cadera y de los pies para caminar por superficies disparejas. El trabajo de Shin abordasolamente el caminado estático, mientras que el trabajo de Huang propone un método parael caminado dinámico [1].
Cristóbal López De Jesús 4
ESTADO DEL ARTE CAPÍTULO I
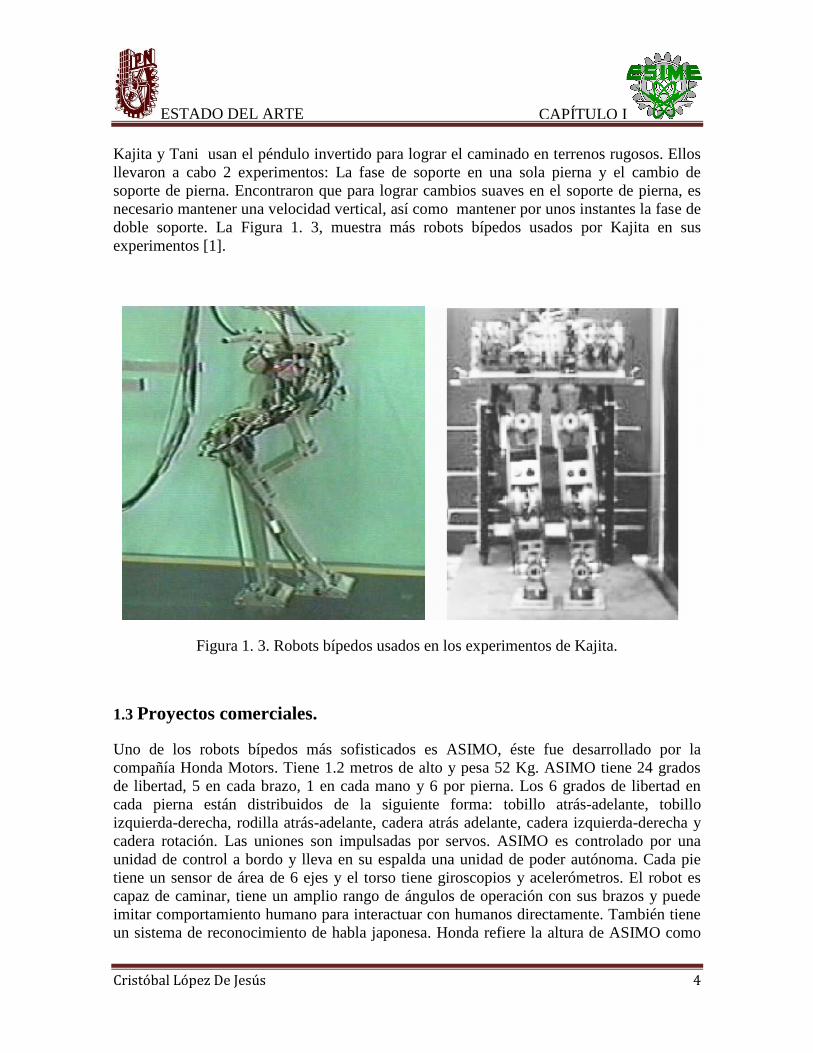
Kajita y Tani usan el péndulo invertido para lograr el caminado en terrenos rugosos. Ellosllevaron a cabo 2 experimentos: La fase de soporte en una sola pierna y el cambio desoporte de pierna. Encontraron que para lograr cambios suaves en el soporte de pierna, esnecesario mantener una velocidad vertical, así como mantener por unos instantes la fase dedoble soporte. La Figura 1. 3, muestra más robots bípedos usados por Kajita en susexperimentos [1].
Figura 1. 3. Robots bípedos usados en los experimentos de Kajita.
1.3 Proyectos comerciales.
Uno de los robots bípedos más sofisticados es ASIMO, éste fue desarrollado por lacompañía Honda Motors. Tiene 1.2 metros de alto y pesa 52 Kg. ASIMO tiene 24 gradosde libertad, 5 en cada brazo, 1 en cada mano y 6 por pierna. Los 6 grados de libertad encada pierna están distribuidos de la siguiente forma: tobillo atrás-adelante, tobilloizquierda-derecha, rodilla atrás-adelante, cadera atrás adelante, cadera izquierda-derecha ycadera rotación. Las uniones son impulsadas por servos. ASIMO es controlado por unaunidad de control a bordo y lleva en su espalda una unidad de poder autónoma. Cada pietiene un sensor de área de 6 ejes y el torso tiene giroscopios y acelerómetros. El robot escapaz de caminar, tiene un amplio rango de ángulos de operación con sus brazos y puedeimitar comportamiento humano para interactuar con humanos directamente. También tieneun sistema de reconocimiento de habla japonesa. Honda refiere la altura de ASIMO como
Cristóbal López De Jesús 5
ESTADO DEL ARTE CAPÍTULO I
la mínima altura la cual le posibilita manejar operaciones en el mundo de los humanos. Sinembargo, el principal inconveniente es su costo de construcción e investigación (una copiacuesta cerca del millón de dólares y su investigación 300 millones de dólares.) Figura 1. 4[1].
Figura 1. 4. Robot humanoide ASIMO de Honda.
1.4 Robots comerciales de bajo costo.
Debido al alto costo de los robots comerciales mencionados en la sección anterior, hansurgido compañías dedicadas a diseñar modelos de robots de bajo costo y que cumplan conlas necesidades básicas para realizar investigaciones sobre el caminado en robots bípedos yotras configuraciones. Estos robots poseen limitaciones en cuanto a los motores usados parala propulsión o en lo referente a sensores, pero ofrecen una excelente base para el desarrollode estrategias de control sobre el caminado.
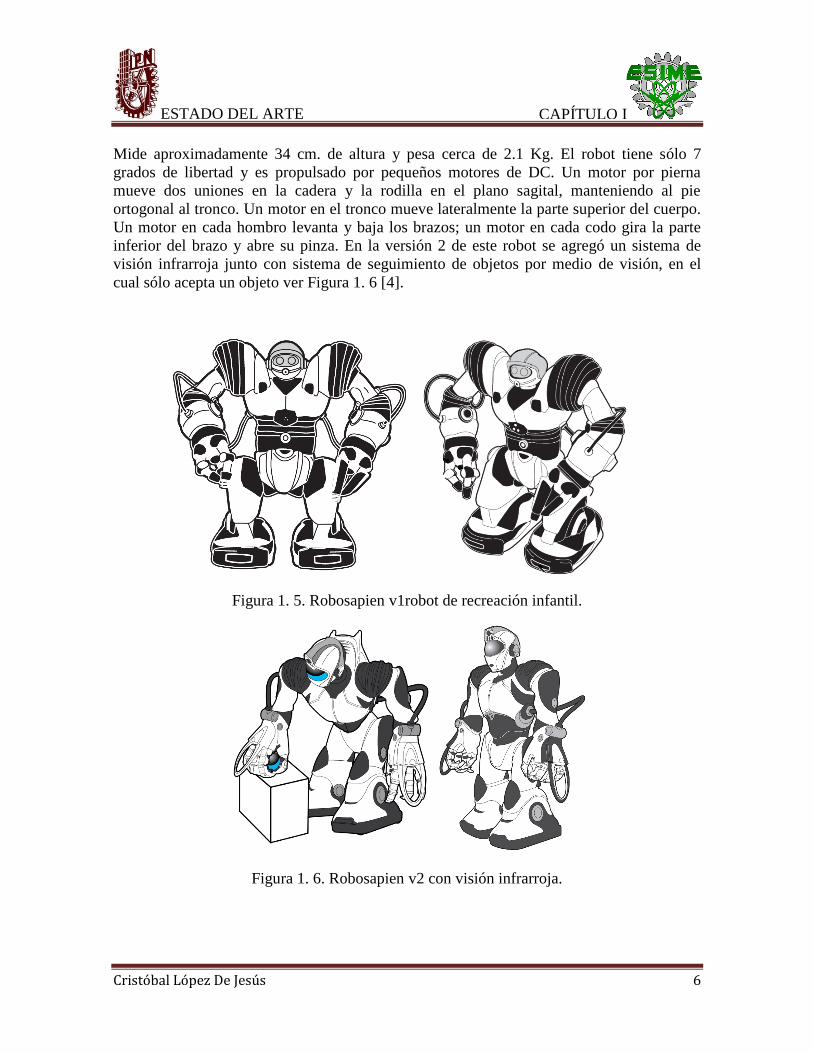
Un ejemplo de ellos es el Robosapien de WowWee, Figura 1. 5. Este robot está orientado almercado de juguetes. Es también usado por algunas universidades para ingresar en lainvestigación de bípedos y realizar sus primeros pasos. El robot permite sólo caminadopasivo, y la estructura es estáticamente estable (tiene pies grandes). El centro de masa esbajo, lo que hace al Robosapien estable [3].
Cristóbal López De Jesús 6
ESTADO DEL ARTE CAPÍTULO I
Mide aproximadamente 34 cm. de altura y pesa cerca de 2.1 Kg. El robot tiene sólo 7grados de libertad y es propulsado por pequeños motores de DC. Un motor por piernamueve dos uniones en la cadera y la rodilla en el plano sagital, manteniendo al pieortogonal al tronco. Un motor en el tronco mueve lateralmente la parte superior del cuerpo.Un motor en cada hombro levanta y baja los brazos; un motor en cada codo gira la parteinferior del brazo y abre su pinza. En la versión 2 de este robot se agregó un sistema devisión infrarroja junto con sistema de seguimiento de objetos por medio de visión, en elcual sólo acepta un objeto ver Figura 1. 6 [4].
Figura 1. 5. Robosapien v1robot de recreación infantil.
Figura 1. 6. Robosapien v2 con visión infrarroja.
Cristóbal López De Jesús 7
ESTADO DEL ARTE CAPÍTULO I
1.5 Robot Bioloid.
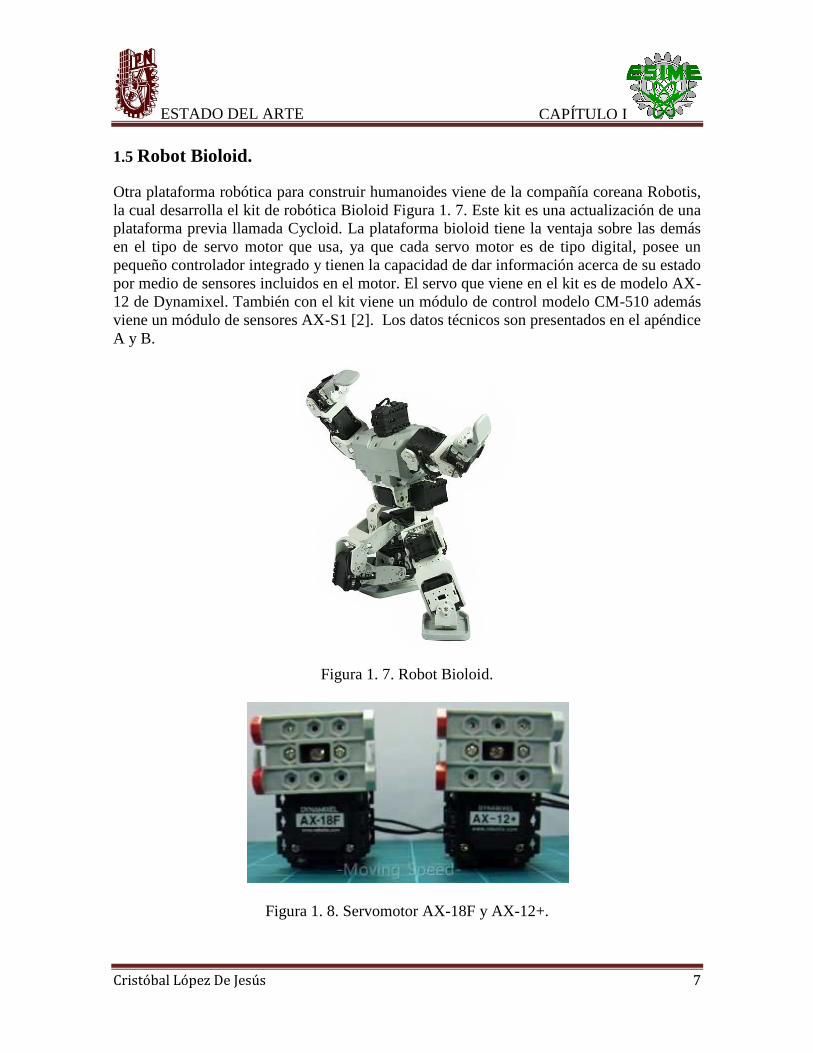
Otra plataforma robótica para construir humanoides viene de la compañía coreana Robotis,la cual desarrolla el kit de robótica Bioloid Figura 1. 7. Este kit es una actualización de unaplataforma previa llamada Cycloid. La plataforma bioloid tiene la ventaja sobre las demásen el tipo de servo motor que usa, ya que cada servo motor es de tipo digital, posee unpequeño controlador integrado y tienen la capacidad de dar información acerca de su estadopor medio de sensores incluidos en el motor. El servo que viene en el kit es de modelo AX-12 de Dynamixel. También con el kit viene un módulo de control modelo CM-510 ademásviene un módulo de sensores AX-S1 [2]. Los datos técnicos son presentados en el apéndiceA y B.
Figura 1. 7. Robot Bioloid.
Figura 1. 8. Servomotor AX-18F y AX-12+.

Cristóbal López De Jesús 8
ESTADO DEL ARTE CAPÍTULO I
Cada actuador Dynamixel AX-12 (Figura 1. 8) incluido en el kit permite la rotacióncontinua, y tiene un microcontrolador que entiende 50 comandos, la mayoría de los cualesfijan o leen parámetros que definen su comportamiento. El típico servo sólo entiende laorden "ángulo objetivo" (dada por una señal PWM), pero el AX-12 permite utilizarloscomo un actuador profesional con sensores. En otras palabras el AX-12 recibeinstrucciones en lugar de una señal PWM. Cada servo AX-12 posee un pequeñocontrolador que se encarga de la ejecución de las órdenes dadas, de la recolección de datosde los sensores y de la comunicación al exterior. La información leída de los sensorespuede ser la posición actual, la corriente consumida, o la variación de la temperatura delservo con la carga aplicada en el mismo. La interfaz de cada servo es de tipo serial, siendoeste el medio por el cual se le mandan las ordenes y se obtiene la información de lossensores [2].
Figura 1. 9. Módulo CM-510.
Por su parte el CM-510 (Figura 1. 9) es el cerebro de la plataforma Bioloid y está basado enel microcontrolador Atmel ATMEGA 2561. Para este microcontrolador existencompiladores en C, lo que facilita la programación. Cabe mencionar que este módulocuenta con un puerto de comunicación RS-232 por el cual es posible la comunicación conla computadora [2].
Por último el módulo AX-S1 (Figura 1. 10) es similar a un motor AX-12, pero no poseemovimiento sólo sensores. Estos sensores son infrarrojos y capaces de medir distancia,también posee un micrófono que cumple la función de sensor sonoro [2].
Figura 1. 10. Modulo AX-S1.
Cristóbal López De Jesús 9
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
CAPÍTULO IIDISEÑO DEL MODELO ROBOT BIPEDO
BIOLOID
2. Introducción.
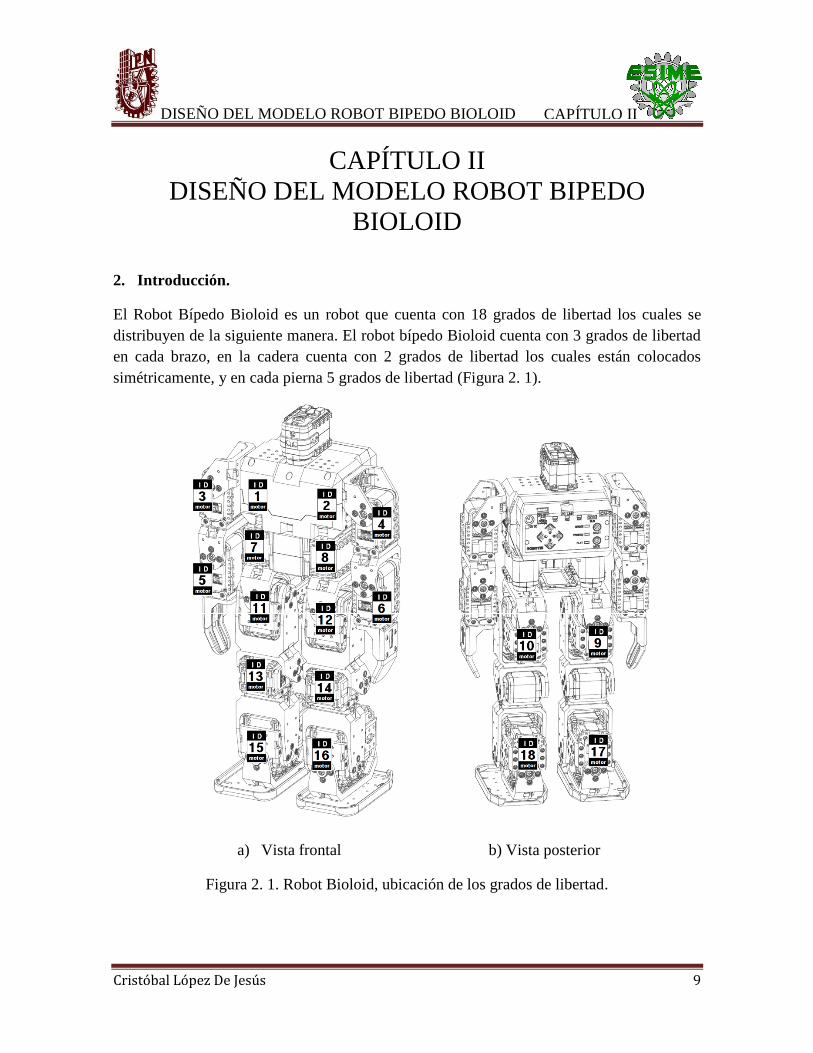
El Robot Bípedo Bioloid es un robot que cuenta con 18 grados de libertad los cuales sedistribuyen de la siguiente manera. El robot bípedo Bioloid cuenta con 3 grados de libertaden cada brazo, en la cadera cuenta con 2 grados de libertad los cuales están colocadossimétricamente, y en cada pierna 5 grados de libertad (Figura 2. 1).
a) Vista frontal b) Vista posterior
Figura 2. 1. Robot Bioloid, ubicación de los grados de libertad.
Cristóbal López De Jesús 10
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
El desafío que implica contar con esta cantidad de grados de libertad, crea un reto cuandose desarrolla el modelo matemático de todo el Robot Bípedo Bioloid incrementando eltiempo del desarrollo e implementación del control.
Con el tiempo se han desarrollado nuevas herramientas para implementar el control ymodelar estos mecanismos de una forma eficiente y práctica, como Simulink de Matlab, asícomo también nuevos métodos de control que no requieren necesariamente el modelomatemático del sistema que se requiere simular como puede ser el Control Difuso.
2.1 Restricciones para el modelo de un Robot Bípedo en Simulink.
Antes de empezar a construir el modelo en Simulink hay que tener en cuenta ciertainformación y restricciones necesarias para delimitar el problema ya que cierta informaciónno es requerida o simplemente tenerla en cuenta en el modelo no causará ningún efectosobre los resultados.
Restricciones:
a) Los brazos del robot se consideran inexistentes o que siempre poseen una posturarígida y no influyen en la dinámica del robot de manera significativa.
b) Los brazos del robot deben de tener una postura equilibrada o se deben encontrarcerca del centro de masa del robot, de esta manera se disminuye el efecto de lasextremidades superiores sobre el centro de masa del robot que comúnmente se usaen el algoritmos de control de equilibrio durante la acción de caminado. Figura 2. 2
Figura 2. 2. Posición frontal brazos extendidos.
c) Para simular y aplicar la perturbación en el modelo en Simulink se trabajará en elplano coronal como se aprecia en la Figura 2. 3.
Cristóbal López De Jesús 11
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
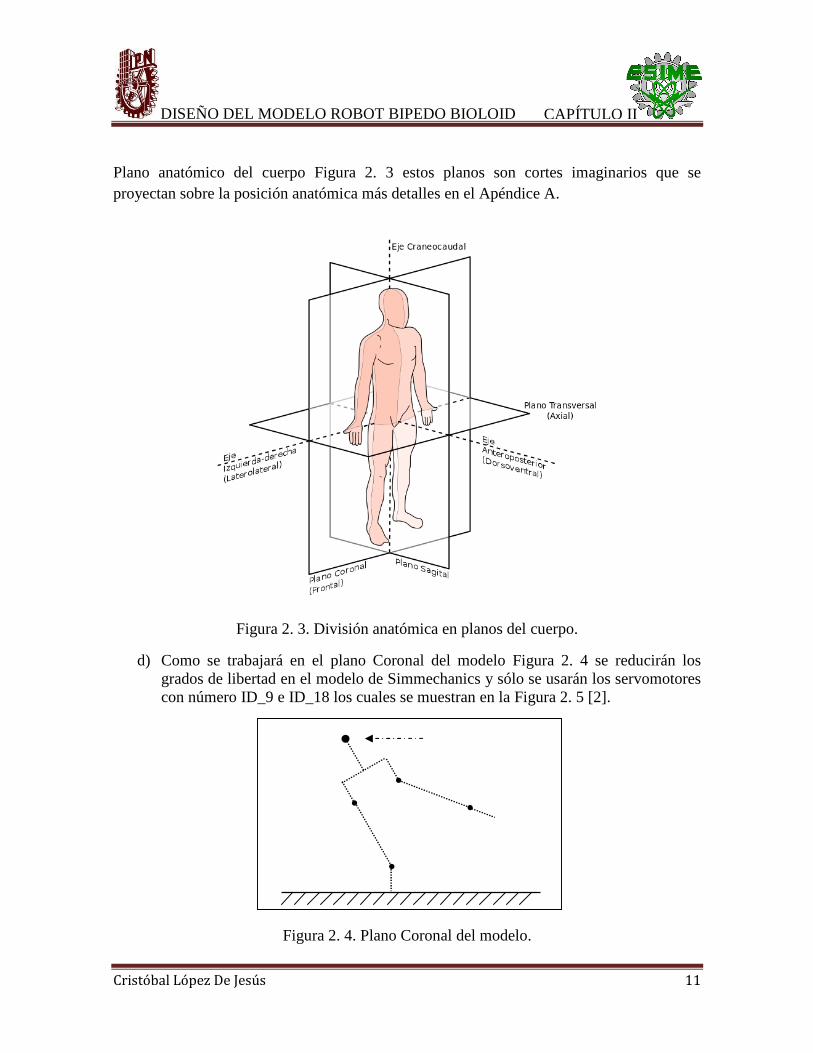
Plano anatómico del cuerpo Figura 2. 3 estos planos son cortes imaginarios que seproyectan sobre la posición anatómica más detalles en el Apéndice A.
Figura 2. 3. División anatómica en planos del cuerpo.
d) Como se trabajará en el plano Coronal del modelo Figura 2. 4 se reducirán losgrados de libertad en el modelo de Simmechanics y sólo se usarán los servomotorescon número ID_9 e ID_18 los cuales se muestran en la Figura 2. 5 [2].
Figura 2. 4. Plano Coronal del modelo.
Cristóbal López De Jesús 12
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
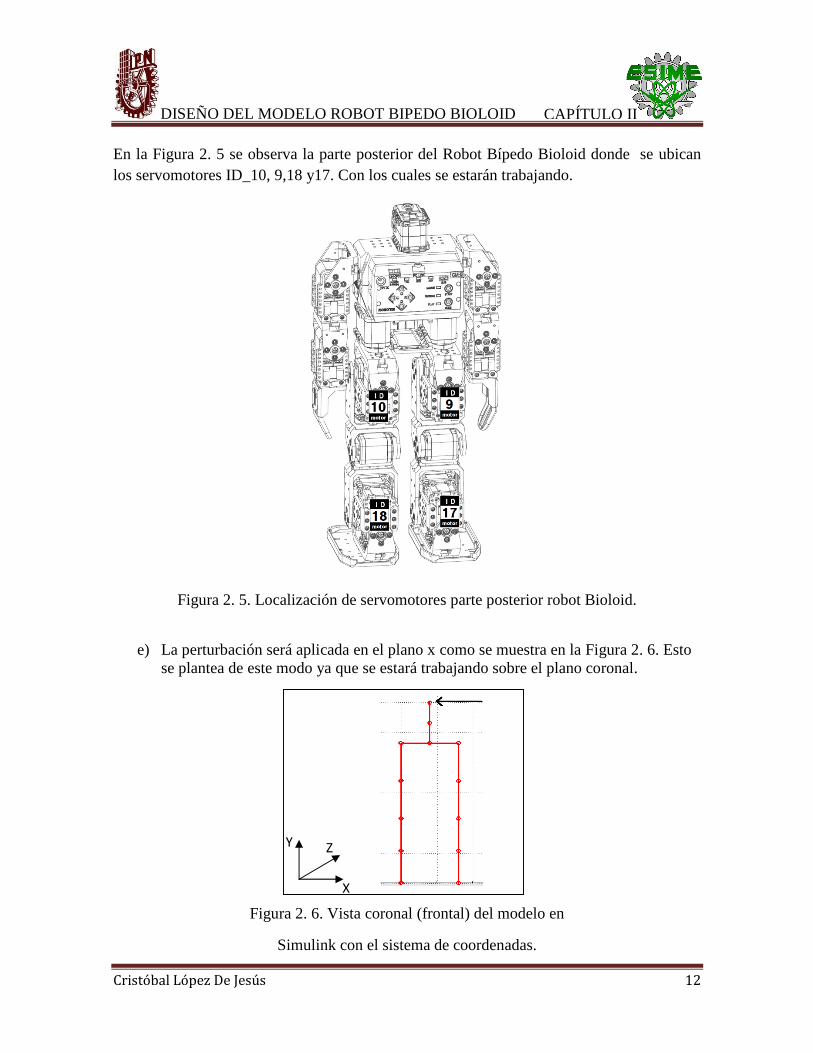
En la Figura 2. 5 se observa la parte posterior del Robot Bípedo Bioloid donde se ubicanlos servomotores ID_10, 9,18 y17. Con los cuales se estarán trabajando.
Figura 2. 5. Localización de servomotores parte posterior robot Bioloid.
e) La perturbación será aplicada en el plano x como se muestra en la Figura 2. 6. Estose plantea de este modo ya que se estará trabajando sobre el plano coronal.
Figura 2. 6. Vista coronal (frontal) del modelo en
Simulink con el sistema de coordenadas.
X
Y Z

Cristóbal López De Jesús 13
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
2.2 Construcción del modelo de un Robot Bípedo Bioloid.
Para construir el modelo del Robot Bípedo Bioloid se tomaron en cuenta las dimensionesreales de Robot Bípedo armado con cada una de las piezas que lo componen comoServomotores, conectores para hombros, conectores para rodillas, pies y manos. Estainformación es importante ya que será necesaria para obtener los tensores de inercias ytambién para el modelo que se creará en Simmechanics.
Es necesario comentar que después de haber obtenido las dimensiones y masa del RobotBípedo Bioloid será necesario construir un modelo completo del Robot en 3D en algúnprograma de diseño CAD, se recomienda usar SolidWorks ya que este programa ofrece elcálculo del tensores de inercia para la pieza dibujada en 3D introduciendo las dimensionesexactas y masa del la pieza.
2.2.1 Dimensiones de componentes.
Las piezas que componen al Robot Bípedo Bioloid fueron tomadas de los manuales delfabricante lo cual facilito mucho el acceso a estas dimensiones para cada componenteFigura 2. 7 [1w].
Figura 2. 7. Plano pieza BPF-F4, compone parte de la rodilla.
Cristóbal López De Jesús 14
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
Estos planos que facilita el fabricante muestran medidas detalladas de capa pieza quecomponen al Robot Bípedo Bioloid los cuales están publicados en Robotis con acceso adescargas ilimitadas para los usuarios [1w].
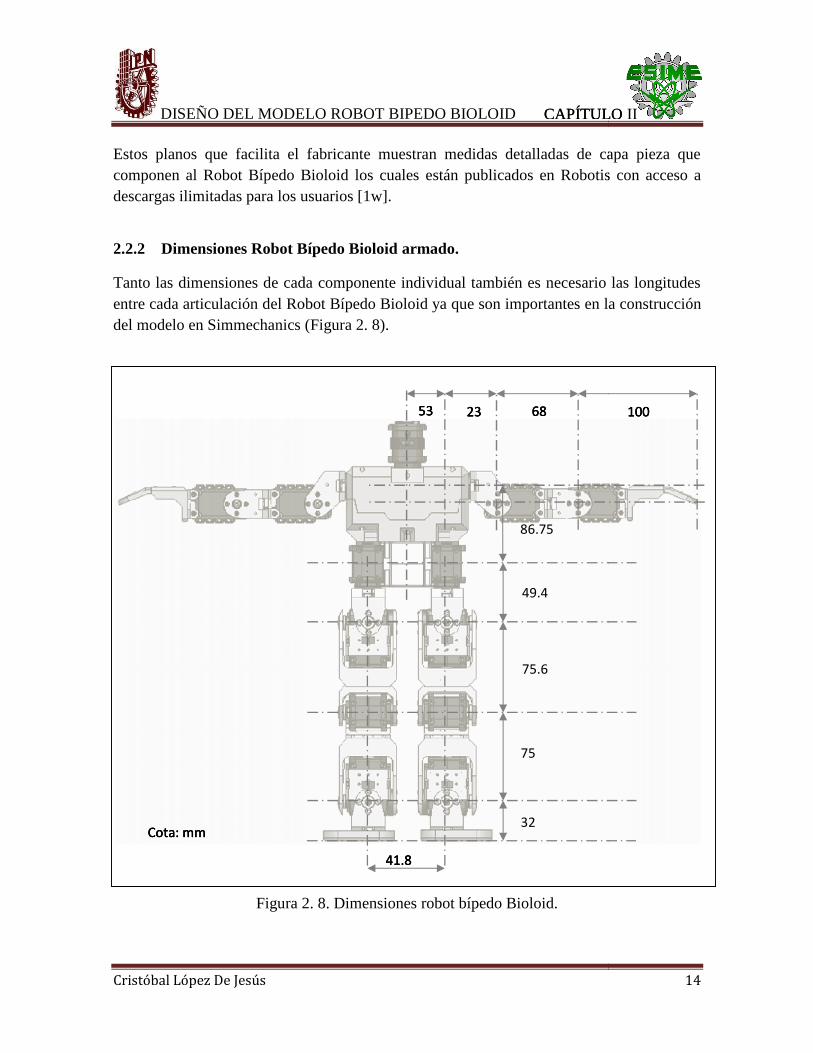
2.2.2 Dimensiones Robot Bípedo Bioloid armado.
Tanto las dimensiones de cada componente individual también es necesario las longitudesentre cada articulación del Robot Bípedo Bioloid ya que son importantes en la construccióndel modelo en Simmechanics (Figura 2. 8).
Figura 2. 8. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
Cristóbal López De Jesús 14
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
Estos planos que facilita el fabricante muestran medidas detalladas de capa pieza quecomponen al Robot Bípedo Bioloid los cuales están publicados en Robotis con acceso adescargas ilimitadas para los usuarios [1w].
2.2.2 Dimensiones Robot Bípedo Bioloid armado.
Tanto las dimensiones de cada componente individual también es necesario las longitudesentre cada articulación del Robot Bípedo Bioloid ya que son importantes en la construccióndel modelo en Simmechanics (Figura 2. 8).
Figura 2. 8. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
Cristóbal López De Jesús 14
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
Estos planos que facilita el fabricante muestran medidas detalladas de capa pieza quecomponen al Robot Bípedo Bioloid los cuales están publicados en Robotis con acceso adescargas ilimitadas para los usuarios [1w].
2.2.2 Dimensiones Robot Bípedo Bioloid armado.
Tanto las dimensiones de cada componente individual también es necesario las longitudesentre cada articulación del Robot Bípedo Bioloid ya que son importantes en la construccióndel modelo en Simmechanics (Figura 2. 8).
Figura 2. 8. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
Cristóbal López De Jesús 15
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
2.2.3 Modelo en SolidWorks.
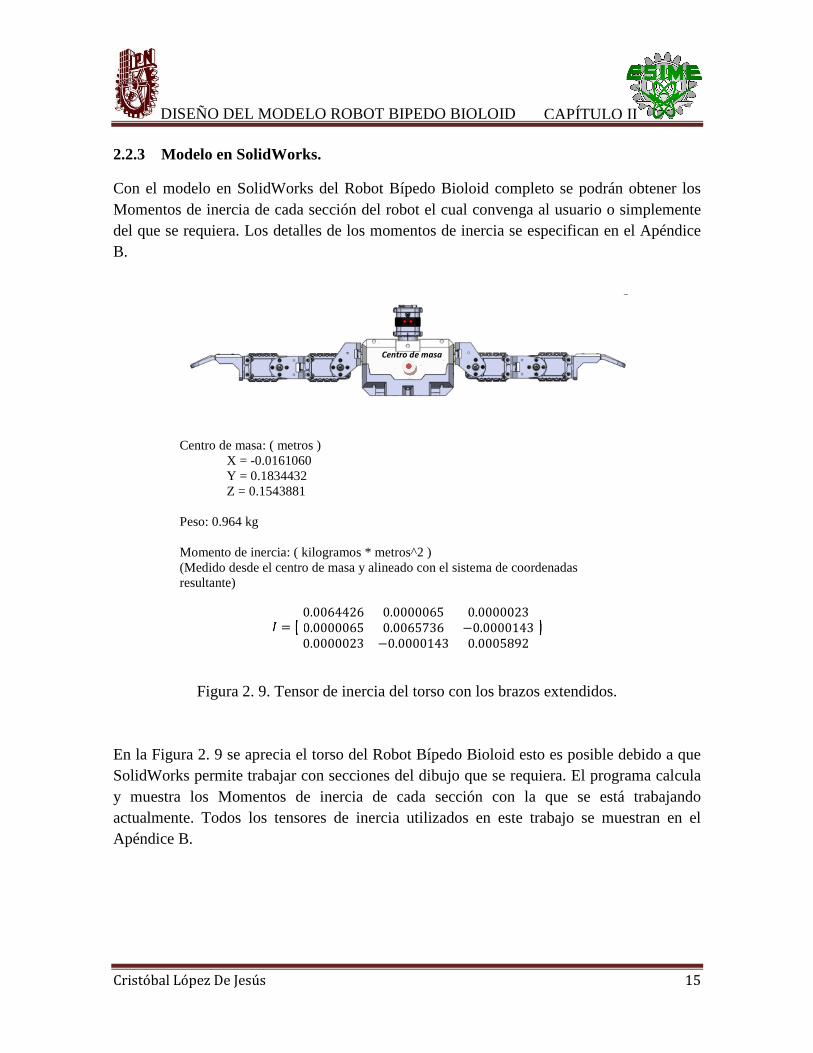
Con el modelo en SolidWorks del Robot Bípedo Bioloid completo se podrán obtener losMomentos de inercia de cada sección del robot el cual convenga al usuario o simplementedel que se requiera. Los detalles de los momentos de inercia se especifican en el ApéndiceB.
Centro de masa: ( metros )X = -0.0161060Y = 0.1834432Z = 0.1543881
Peso: 0.964 kg
Momento de inercia: ( kilogramos * metros^2 )(Medido desde el centro de masa y alineado con el sistema de coordenadasresultante)
= 0.0064426 0.0000065 0.00000230.0000065 0.0065736 −0.00001430.0000023 −0.0000143 0.0005892Figura 2. 9. Tensor de inercia del torso con los brazos extendidos.
En la Figura 2. 9 se aprecia el torso del Robot Bípedo Bioloid esto es posible debido a queSolidWorks permite trabajar con secciones del dibujo que se requiera. El programa calculay muestra los Momentos de inercia de cada sección con la que se está trabajandoactualmente. Todos los tensores de inercia utilizados en este trabajo se muestran en elApéndice B.
Centro de masa
Cristóbal López De Jesús 16
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
2.2.4 Modelo en Simmechanics
Para construir el modelo se tomaran las siguientes consideraciones:
El vector de la fuerza de gravedad que actúa sobre el modelo es [0 -9.81 0] estevector se define en Simmechanics con el bloque Machine Environment Figura 2. 10.
Figura 2. 10. Bloque Machine Enviroment.
La posición en el plano de coordenadas del modelo es [0 0 0] el cual se especificacon el bloque Ground Figura 2. 11.
Figura 2. 11. Bloque Ground.
También se considerará la pierna izquierda anclada en el suelo, esto con el hecho de que nose cuenta con el modelo matemático con el cual se pude considerar la fricción que hay entreel pie y el suelo del modelo Figura 2. 12.
Figura 2. 12. Modelo Robot Bípedo Bioloid con pierna izquierda anclada.
Cristóbal López De Jesús 17
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
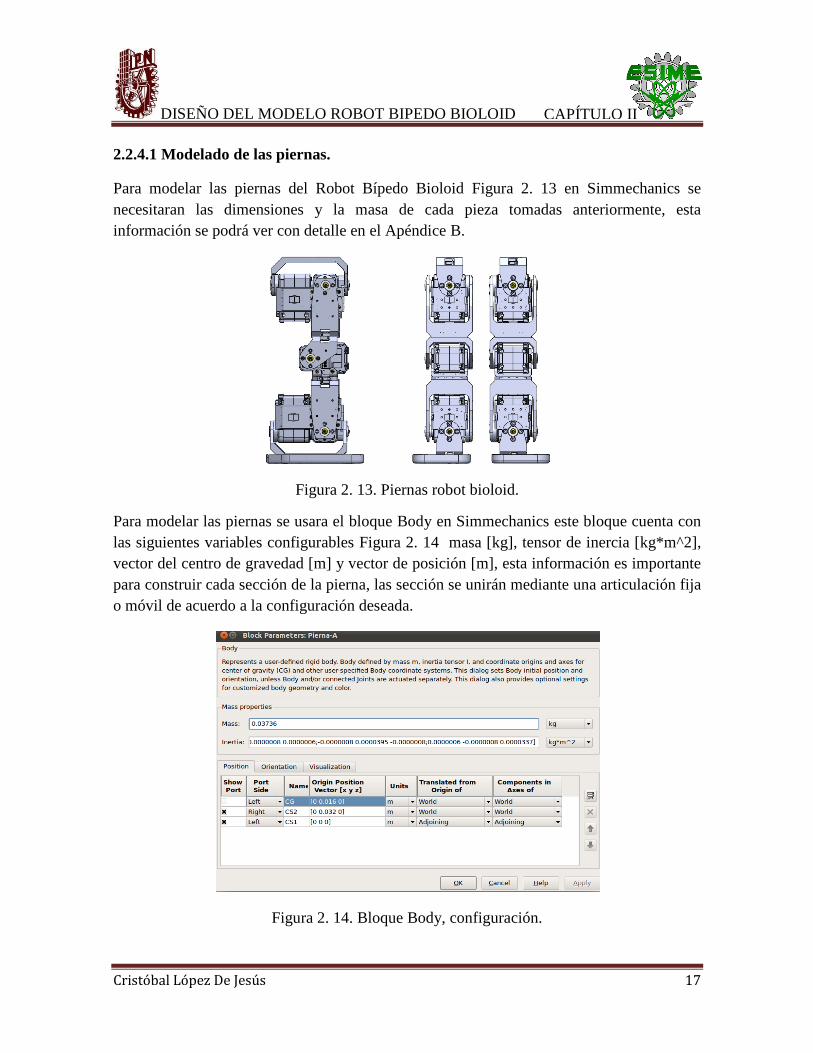
2.2.4.1 Modelado de las piernas.
Para modelar las piernas del Robot Bípedo Bioloid Figura 2. 13 en Simmechanics senecesitaran las dimensiones y la masa de cada pieza tomadas anteriormente, estainformación se podrá ver con detalle en el Apéndice B.
Figura 2. 13. Piernas robot bioloid.
Para modelar las piernas se usara el bloque Body en Simmechanics este bloque cuenta conlas siguientes variables configurables Figura 2. 14 masa [kg], tensor de inercia [kg*m^2],vector del centro de gravedad [m] y vector de posición [m], esta información es importantepara construir cada sección de la pierna, las sección se unirán mediante una articulación fijao móvil de acuerdo a la configuración deseada.
Figura 2. 14. Bloque Body, configuración.
Cristóbal López De Jesús 18
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
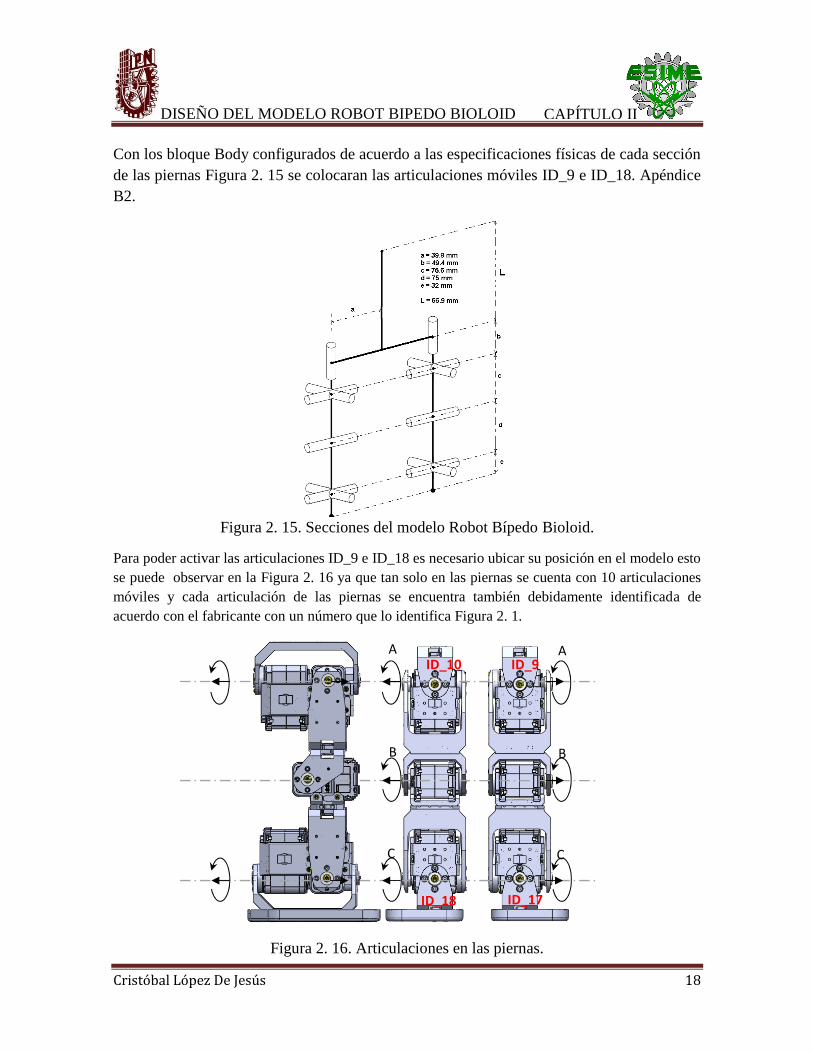
Con los bloque Body configurados de acuerdo a las especificaciones físicas de cada secciónde las piernas Figura 2. 15 se colocaran las articulaciones móviles ID_9 e ID_18. ApéndiceB2.
Figura 2. 15. Secciones del modelo Robot Bípedo Bioloid.
Para poder activar las articulaciones ID_9 e ID_18 es necesario ubicar su posición en el modelo estose puede observar en la Figura 2. 16 ya que tan solo en las piernas se cuenta con 10 articulacionesmóviles y cada articulación de las piernas se encuentra también debidamente identificada deacuerdo con el fabricante con un número que lo identifica Figura 2. 1.
Figura 2. 16. Articulaciones en las piernas.
A1
A2
B1
B2
C1
C2
ID_10 ID_9
ID_18 ID_17

Cristóbal López De Jesús 19
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
Estas articulaciones ID_9 e ID_18 se activaran en el modelo de Simmechanics con elbloque de articulación Revolute con eje de rotación [0 0 1] Figura 2. 17 con laconfiguración de rotación lista solo será necesario conectarlos en la posición de ID_9 eID_18 con los bloques Body.
Figura 2. 17. Bloque Revolute.
El modelo está configurado de ésta manera de acuerdo a que se experimentara conperturbaciones sobre el plano coronal y las únicas articulaciones que tendrán efecto sobreeste plano serán ID_9 y ID_18 las articulaciones restantes se dejaran fijas con un bloqueWeld Figura 2. 18 este bloque Weld no requiere de alguna configuración especial soloconectarla con los bloques Body restantes.
Figura 2. 18. Bloque Weld.
Con todos los bloques conectados, configurados con sus propias dimensiones, centro degravedad, tensores de inercia, masa y articulaciones. Tenemos ya diseñado la partemecánica del modelo Robot Bípedo Bioloid.
Los detalles y restricciones mostrados en las secciones anteriores son requeridos para laobtener resultados aproximados al modelo real de Robot Bípedo Bioloid por eso esimportante tomar en cuenda cada una de ellas para las simulaciones y las pruebas a realizaren este trabajo.
Cristóbal López De Jesús 20
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
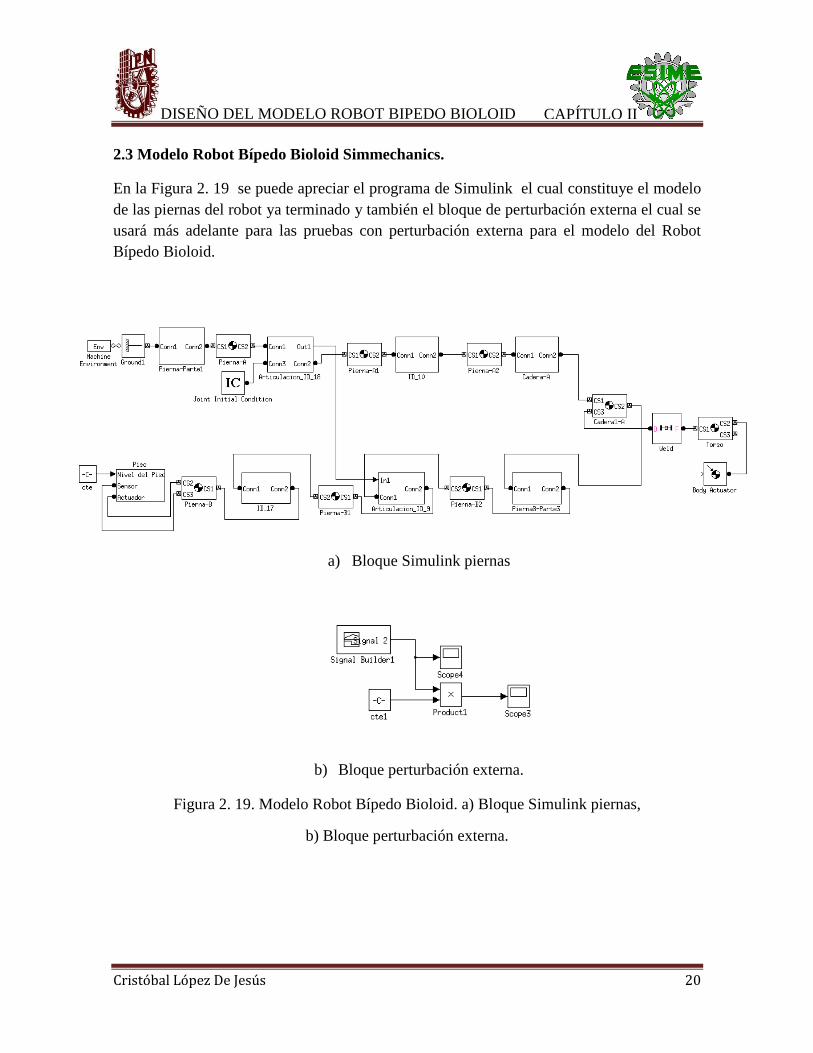
2.3 Modelo Robot Bípedo Bioloid Simmechanics.
En la Figura 2. 19 se puede apreciar el programa de Simulink el cual constituye el modelode las piernas del robot ya terminado y también el bloque de perturbación externa el cual seusará más adelante para las pruebas con perturbación externa para el modelo del RobotBípedo Bioloid.
a) Bloque Simulink piernas
b) Bloque perturbación externa.
Figura 2. 19. Modelo Robot Bípedo Bioloid. a) Bloque Simulink piernas,
b) Bloque perturbación externa.
Cristóbal López De Jesús 21
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
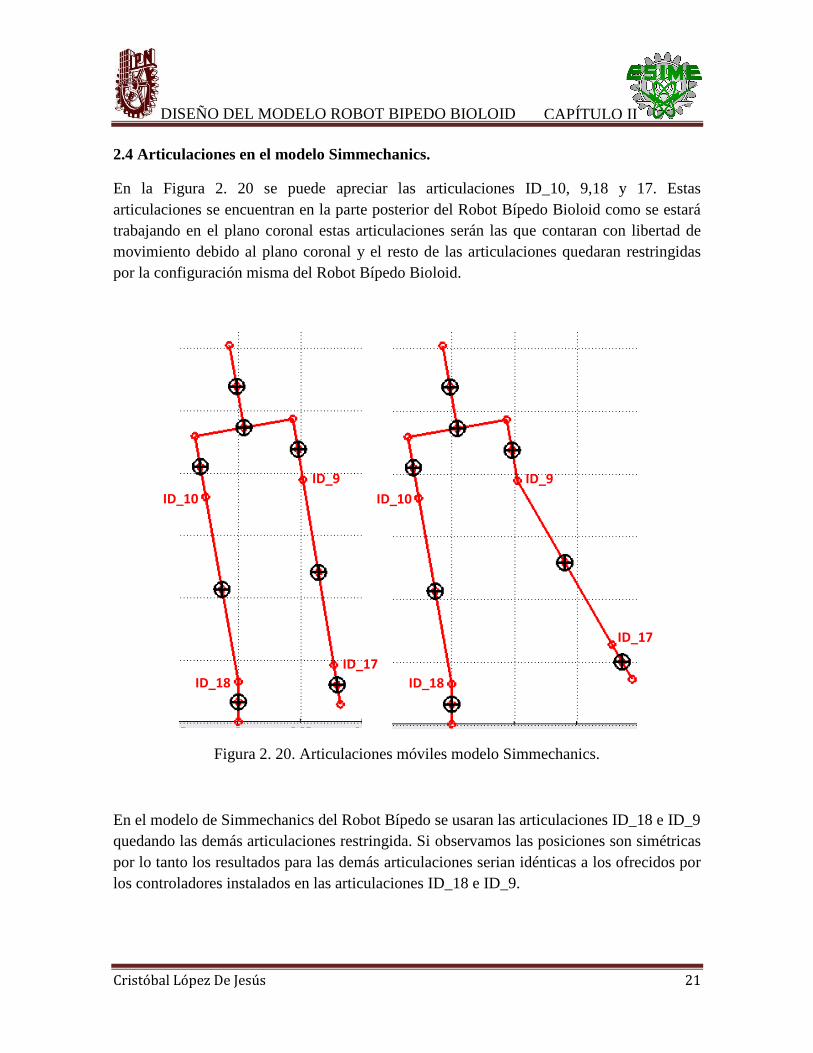
2.4 Articulaciones en el modelo Simmechanics.
En la Figura 2. 20 se puede apreciar las articulaciones ID_10, 9,18 y 17. Estasarticulaciones se encuentran en la parte posterior del Robot Bípedo Bioloid como se estarátrabajando en el plano coronal estas articulaciones serán las que contaran con libertad demovimiento debido al plano coronal y el resto de las articulaciones quedaran restringidaspor la configuración misma del Robot Bípedo Bioloid.
Figura 2. 20. Articulaciones móviles modelo Simmechanics.
En el modelo de Simmechanics del Robot Bípedo se usaran las articulaciones ID_18 e ID_9quedando las demás articulaciones restringida. Si observamos las posiciones son simétricaspor lo tanto los resultados para las demás articulaciones serian idénticas a los ofrecidos porlos controladores instalados en las articulaciones ID_18 e ID_9.
ID_18
ID_9ID_10
ID_17ID_18
ID_9ID_10
ID_17
Cristóbal López De Jesús 22
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
2.5 Conexión de sensores en las articulaciones.
Una vez que el diseño mecánico de las piernas esté listas, es necesario conectar los sensoresque retroalimentarán a los bloques de control que se diseñarán más adelante. Esta acción esde suma importancia ya que al unirlos a las articulaciones se generarán las señalesrequeridas para los controladores.
El Robot Bípedo Bioloid utiliza servomotores que controlan el movimiento de lasarticulaciones. Utilizando un bloque Subsytem o subsistema se modelarán las articulacionesdel Robot Bípedo Bioloid. Los bloques de las articulaciones se muestran en las siguientesFigura 2. 21 y Figura 2. 22.
Figura 2. 21. Bloque de articulación ID_18.
Figura 2. 22. Bloque de articulación ID_9.
Estos bloques están conectados de la siguiente manera, los bloques de articulaciones ID_18e ID_9 cuentan con las configuraciones mostradas en las Tablas 2.1 y 2.2 respectivamente.
Bloque articulación ID_18Conn1 Conector hacia las los bloques de las piernasConn3 Bloque condición inicialOut1 Salida sensor posición angular articulación
L11Conn2 Conector hacia las los bloques de las piernas
Tabla 2.1. Bloque articulación ID_18.
Bloque articulación ID_9In1 Entrada sensor posición angular articulación
L11Conn1 Conector hacia las los bloques de las piernasConn2 Conector hacia las los bloques de las piernas
Tabla 2.2. Bloque articulación ID_9.
Cristóbal López De Jesús 23
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
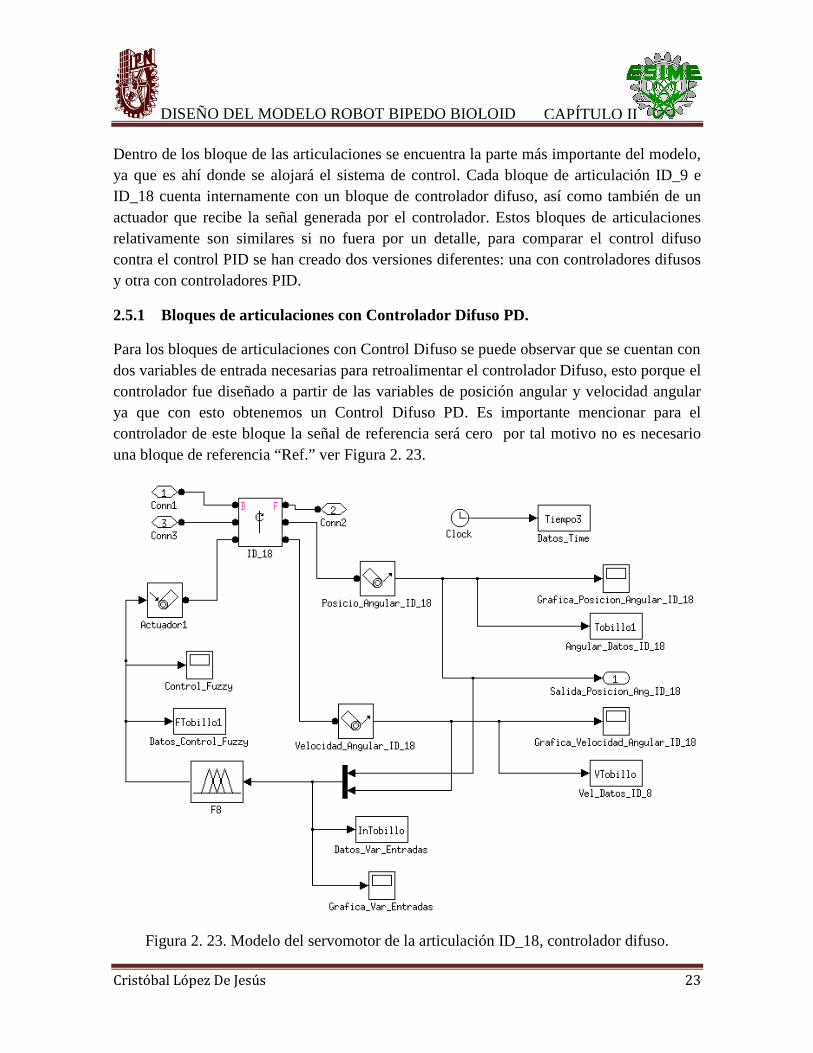
Dentro de los bloque de las articulaciones se encuentra la parte más importante del modelo,ya que es ahí donde se alojará el sistema de control. Cada bloque de articulación ID_9 eID_18 cuenta internamente con un bloque de controlador difuso, así como también de unactuador que recibe la señal generada por el controlador. Estos bloques de articulacionesrelativamente son similares si no fuera por un detalle, para comparar el control difusocontra el control PID se han creado dos versiones diferentes: una con controladores difusosy otra con controladores PID.
2.5.1 Bloques de articulaciones con Controlador Difuso PD.
Para los bloques de articulaciones con Control Difuso se puede observar que se cuentan condos variables de entrada necesarias para retroalimentar el controlador Difuso, esto porque elcontrolador fue diseñado a partir de las variables de posición angular y velocidad angularya que con esto obtenemos un Control Difuso PD. Es importante mencionar para elcontrolador de este bloque la señal de referencia será cero por tal motivo no es necesariouna bloque de referencia “Ref.” ver Figura 2. 23.
Figura 2. 23. Modelo del servomotor de la articulación ID_18, controlador difuso.
Cristóbal López De Jesús 24
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
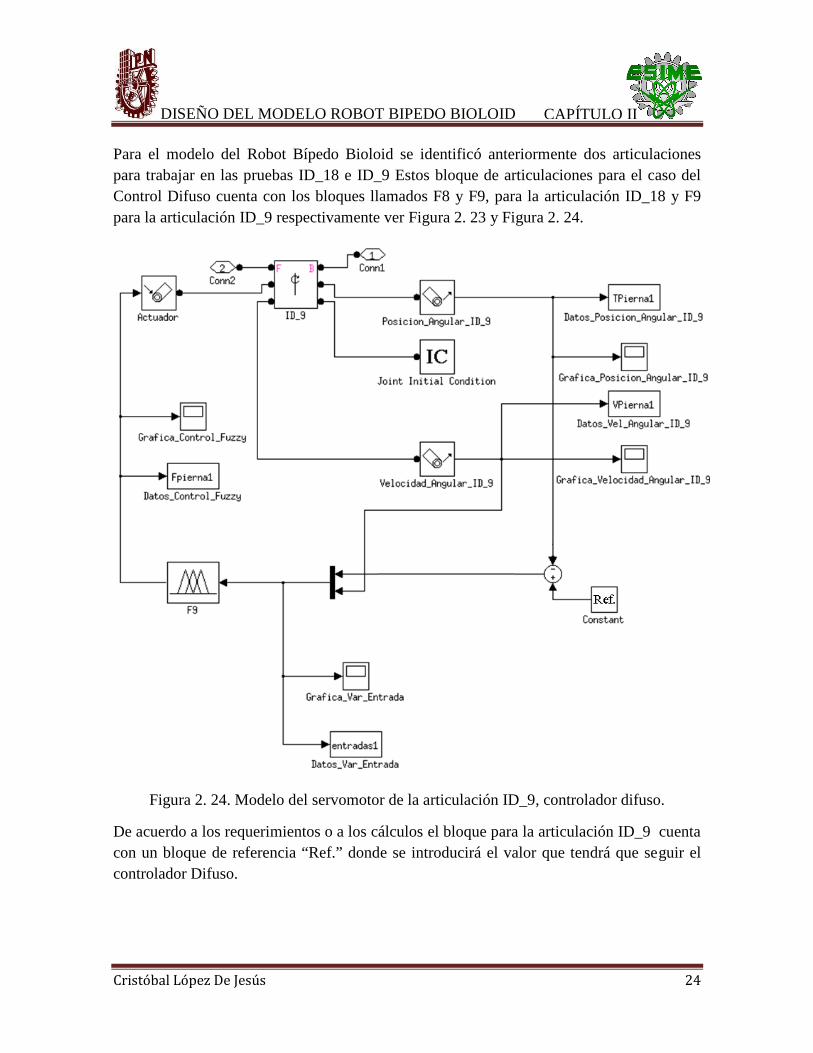
Para el modelo del Robot Bípedo Bioloid se identificó anteriormente dos articulacionespara trabajar en las pruebas ID_18 e ID_9 Estos bloque de articulaciones para el caso delControl Difuso cuenta con los bloques llamados F8 y F9, para la articulación ID_18 y F9para la articulación ID_9 respectivamente ver Figura 2. 23 y Figura 2. 24.
Figura 2. 24. Modelo del servomotor de la articulación ID_9, controlador difuso.
De acuerdo a los requerimientos o a los cálculos el bloque para la articulación ID_9 cuentacon un bloque de referencia “Ref.” donde se introducirá el valor que tendrá que seguir elcontrolador Difuso.
Cristóbal López De Jesús 25
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
2.5.2 Bloques de articulaciones con Controlador PID.
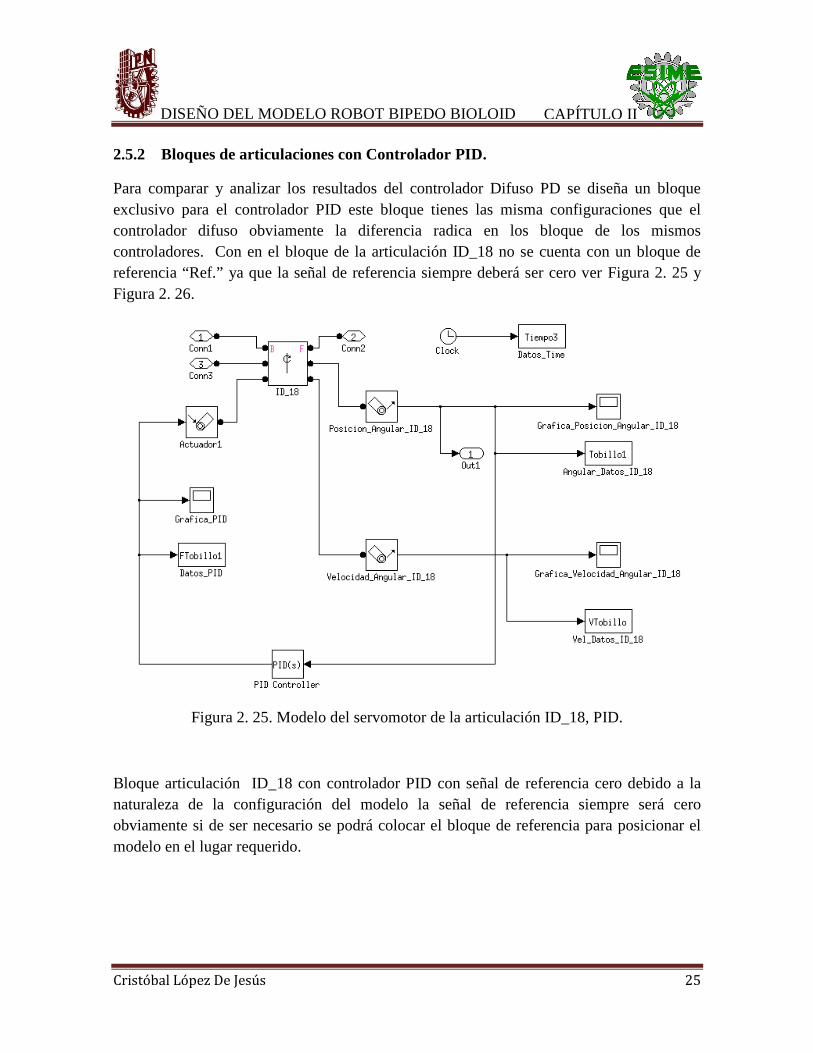
Para comparar y analizar los resultados del controlador Difuso PD se diseña un bloqueexclusivo para el controlador PID este bloque tienes las misma configuraciones que elcontrolador difuso obviamente la diferencia radica en los bloque de los mismoscontroladores. Con en el bloque de la articulación ID_18 no se cuenta con un bloque dereferencia “Ref.” ya que la señal de referencia siempre deberá ser cero ver Figura 2. 25 yFigura 2. 26.
Figura 2. 25. Modelo del servomotor de la articulación ID_18, PID.
Bloque articulación ID_18 con controlador PID con señal de referencia cero debido a lanaturaleza de la configuración del modelo la señal de referencia siempre será ceroobviamente si de ser necesario se podrá colocar el bloque de referencia para posicionar elmodelo en el lugar requerido.

Cristóbal López De Jesús 26
DISEÑO DEL MODELO ROBOT BIPEDO BIOLOID CAPÍTULO II
Los bloque de PID cuentan con un algoritmo de sintonización automático que no requieredel modelo matemático del sistema a simular, esto sólo es posible para versiones de Matlab2010a en adelante.
Figura 2. 26. Modelo del servomotor de la articulación ID_9, PID.
En estas secciones se presentaron las consideraciones y restricciones para el diseño delmodelo de un Robot Bípedo Bioloid como también se mostraron los bloques yconfiguraciones para estas misma. Se diseñaron los modelos del Robot Bípedo con susrespectivos bloques de control quedando configurados para ser programados ysincronizados tales como el control Difuso y PID, el diseño de los controladores se presentaen la siguiente sección.
Cristóbal López De Jesús 27
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
CAPÍTULO IIIDISEÑO DE LOS CONTROLADORES DIFUSO Y
PID3. Diseño de los controladores.
En este capítulo se diseñarán los controladores necesarios para controlar el modelo delRobot Bípedo Bioloid, los controladores serán capaces de generar una señal de controlnecesaria para cada tipo de perturbación que se presente. Estos controladores seránretroalimentados con variables medibles las cuales se obtendrán de los sensores colocadosen cada articulación del Robot Bípedo Bioloid.
Como se ha mencionado anteriormente este trabajo se proponen dos tipos de control paraestabilizar al Robot Bípedo Bioloid, sobre todo uno muy importante el cual lleva el nombrede este trabajo “Estabilizador Difuso para un Robot Bípedo”, el Control Difuso es muyimportante en este trabajo debido que no requiere un modelo matemático para simular eimplementar el control además su diseño es muy intuitivo. Pero también algo importante,con el avance del tiempo se han refinado también los algoritmos de control PID en Matlab,por eso también se propone en este trabajo realizar una comparación de estos métodos decontrol. Cabe destacar que el controlador PID, será sintonizado a través del algoritmoincluido en uno de los bloques de Simulink “PID Controller”.
3.1 Conjuntos.
Estos conjuntos pueden definirse como un conjunto bien definido de elementos o medianteuna función de pertenencia μ que toma valores de 0 ó 1 de un universo en discurso paratodos los elementos que pueden o no pertenecer al conjunto.
Conjuntos clásicos
Un conjunto clásico se puede definir con la función de pertenencia mostrada en la ecuación.( ) = { ∈∉Conjuntos difusos
Un conjunto difuso se encuentra asociado por un valor lingüístico que está definido por unapalabra, etiqueta lingüística o adjetivo. En los conjuntos difusos la función de pertenencia
Cristóbal López De Jesús 28
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
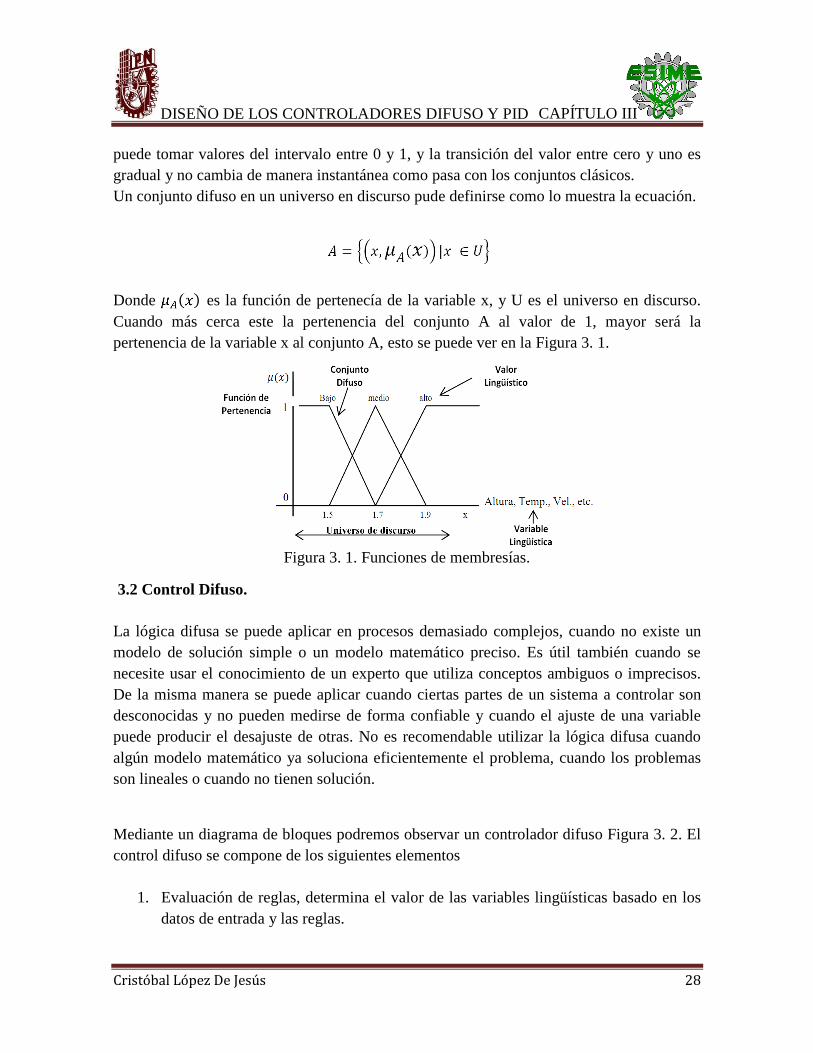
puede tomar valores del intervalo entre 0 y 1, y la transición del valor entre cero y uno esgradual y no cambia de manera instantánea como pasa con los conjuntos clásicos.Un conjunto difuso en un universo en discurso pude definirse como lo muestra la ecuación.
Donde ( ) es la función de pertenecía de la variable x, y U es el universo en discurso.Cuando más cerca este la pertenencia del conjunto A al valor de 1, mayor será lapertenencia de la variable x al conjunto A, esto se puede ver en la Figura 3. 1.
Figura 3. 1. Funciones de membresías.
3.2 Control Difuso.
La lógica difusa se puede aplicar en procesos demasiado complejos, cuando no existe unmodelo de solución simple o un modelo matemático preciso. Es útil también cuando senecesite usar el conocimiento de un experto que utiliza conceptos ambiguos o imprecisos.De la misma manera se puede aplicar cuando ciertas partes de un sistema a controlar sondesconocidas y no pueden medirse de forma confiable y cuando el ajuste de una variablepuede producir el desajuste de otras. No es recomendable utilizar la lógica difusa cuandoalgún modelo matemático ya soluciona eficientemente el problema, cuando los problemasson lineales o cuando no tienen solución.
Mediante un diagrama de bloques podremos observar un controlador difuso Figura 3. 2. Elcontrol difuso se compone de los siguientes elementos
1. Evaluación de reglas, determina el valor de las variables lingüísticas basado en losdatos de entrada y las reglas.
Cristóbal López De Jesús 29
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
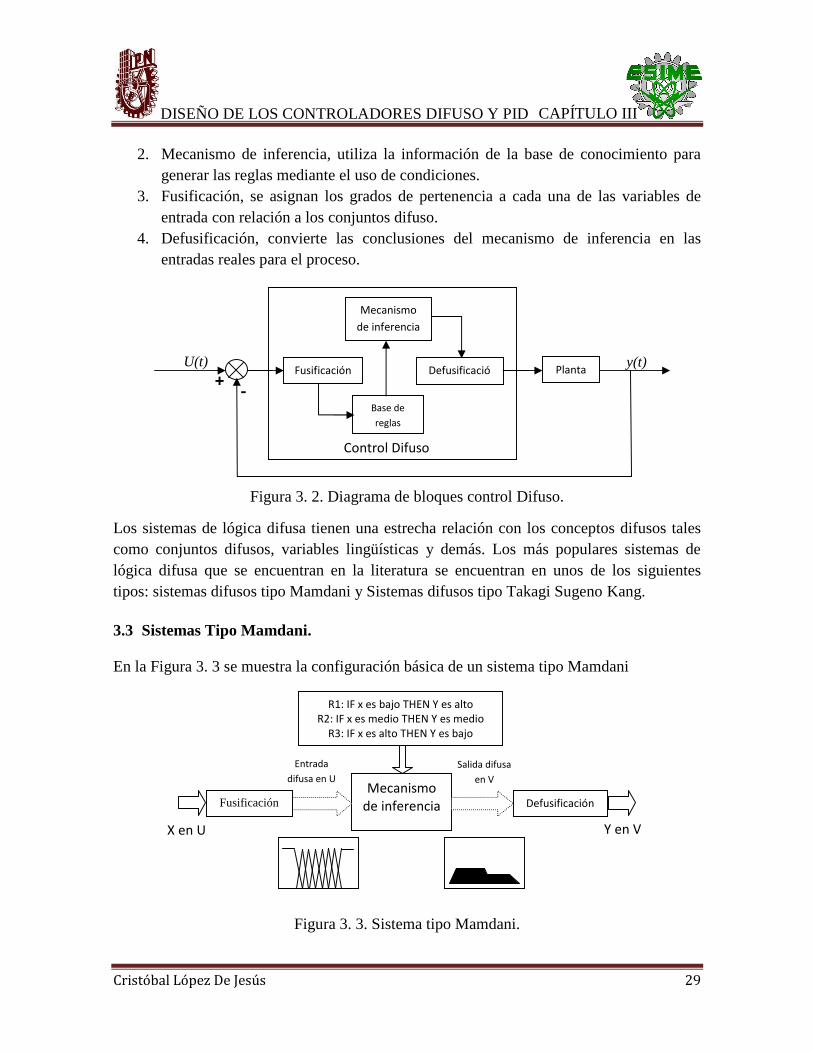
2. Mecanismo de inferencia, utiliza la información de la base de conocimiento paragenerar las reglas mediante el uso de condiciones.
3. Fusificación, se asignan los grados de pertenencia a cada una de las variables deentrada con relación a los conjuntos difuso.
4. Defusificación, convierte las conclusiones del mecanismo de inferencia en lasentradas reales para el proceso.
Figura 3. 2. Diagrama de bloques control Difuso.
Los sistemas de lógica difusa tienen una estrecha relación con los conceptos difusos talescomo conjuntos difusos, variables lingüísticas y demás. Los más populares sistemas delógica difusa que se encuentran en la literatura se encuentran en unos de los siguientestipos: sistemas difusos tipo Mamdani y Sistemas difusos tipo Takagi Sugeno Kang.
3.3 Sistemas Tipo Mamdani.
En la Figura 3. 3 se muestra la configuración básica de un sistema tipo Mamdani
Figura 3. 3. Sistema tipo Mamdani.
R1: IF x es bajo THEN Y es altoR2: IF x es medio THEN Y es medio
R3: IF x es alto THEN Y es bajo
Mecanismode inferenciaFusificación Defusificación
X en U Y en V
Entradadifusa en U
Salida difusaen V
+ -
U(t) y(t)Fusificación Defusificació
n
Planta
Mecanismode inferencia
Base dereglas
Control Difuso
Cristóbal López De Jesús 30
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
3.4 Característica del sistema tipo Mamdani.
Fusificación
La entrada de un sistema de lógica difusa tipo Mamdani normalmente es un valor numéricoproveniente de un sensor, para que este valor pueda ser procesado por el sistema difuso sehace necesario convertirlo a un lenguaje que el mecanismos de inferencia pueda procesar.Esta es la función del Fusificación, que toma los valores numéricos provenientes delexterior y los convierte en valores Difusos que pueden ser procesados por el mecanismo deinferencia. Estos valores difusos son los niveles de pertenencia de los valores de entrada alos diferentes conjuntos difusos en los cuales se ha dividido el universo de discurso de lasdiferentes variables de entrada al sistema.
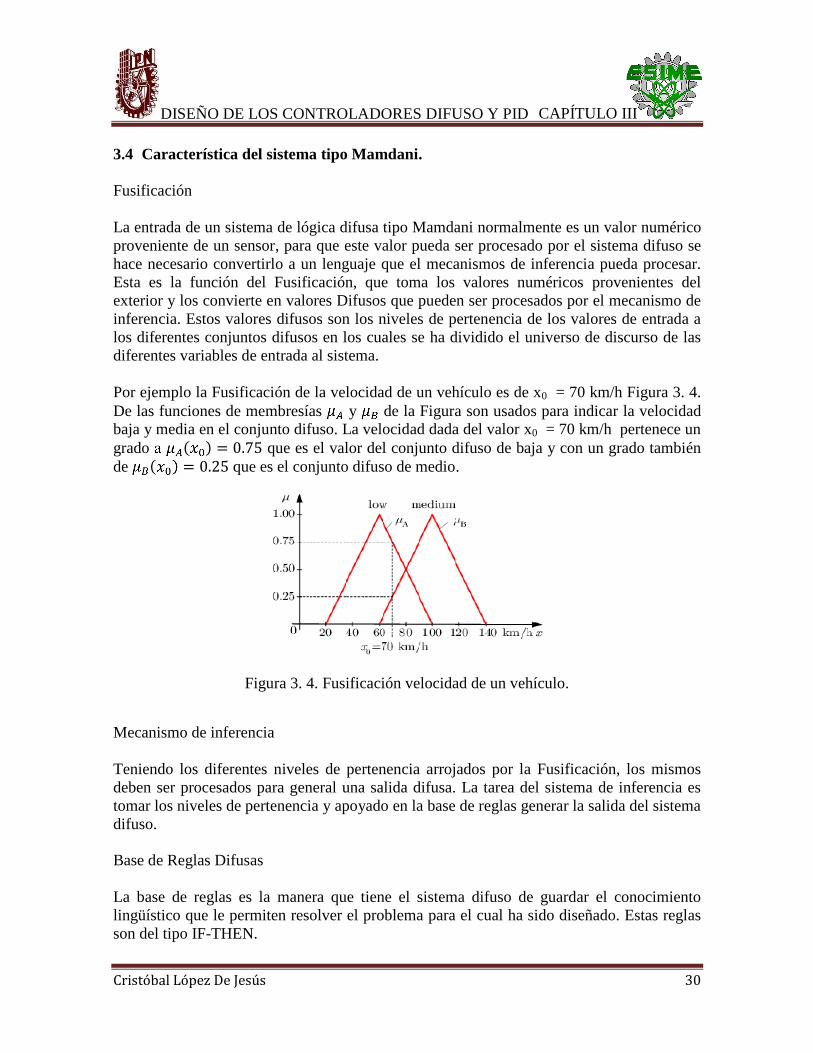
Por ejemplo la Fusificación de la velocidad de un vehículo es de x0 = 70 km/h Figura 3. 4.De las funciones de membresías y de la Figura son usados para indicar la velocidadbaja y media en el conjunto difuso. La velocidad dada del valor x0 = 70 km/h pertenece ungrado a ( ) = 0.75 que es el valor del conjunto difuso de baja y con un grado tambiénde ( ) = 0.25 que es el conjunto difuso de medio.
Figura 3. 4. Fusificación velocidad de un vehículo.
Mecanismo de inferencia
Teniendo los diferentes niveles de pertenencia arrojados por la Fusificación, los mismosdeben ser procesados para general una salida difusa. La tarea del sistema de inferencia estomar los niveles de pertenencia y apoyado en la base de reglas generar la salida del sistemadifuso.
Base de Reglas Difusas
La base de reglas es la manera que tiene el sistema difuso de guardar el conocimientolingüístico que le permiten resolver el problema para el cual ha sido diseñado. Estas reglasson del tipo IF-THEN.
Cristóbal López De Jesús 31
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
Defusificación
La salida que genera el mecanismo de inferencia es una salida difusa, lo cual significa queno puede ser interpretada por un elemento externo (por ejemplo un controlador) que solomanipule información numérica. Para lograr que la salida del sistema difuso pueda serinterpretada por elementos que solo procesen información numérica, hay que convertir lasalida difusa del mecanismos de inferencia, este proceso lo realiza la Fusificación.
La salida del mecanismo de inferencia es un conjunto difuso resultante, para generar lasalida numérica a partir de estos conjuntos existen varias opciones como el Centro deGravedad, los Centros Promediados entre otros.
= ∑ ∫ ( )∑ ∫ ( )Centro de Gravedad
= ∑ ( )∑ ( )Centros Promediados
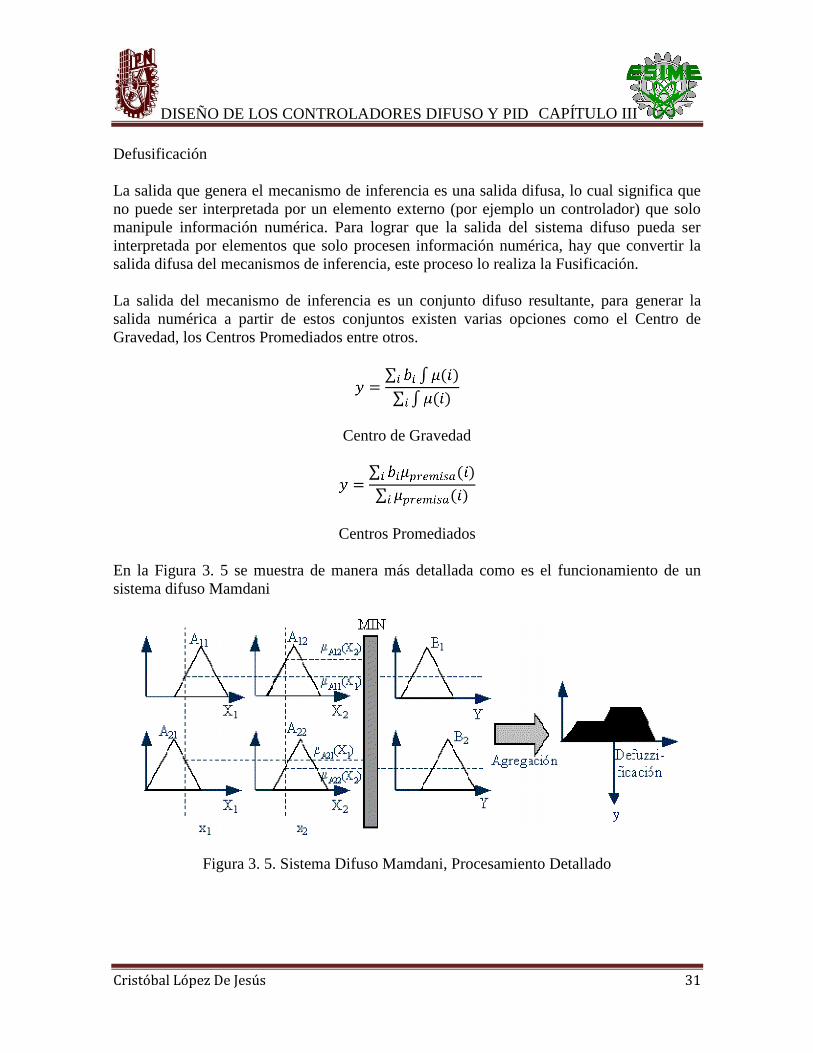
En la Figura 3. 5 se muestra de manera más detallada como es el funcionamiento de unsistema difuso Mamdani
Figura 3. 5. Sistema Difuso Mamdani, Procesamiento Detallado
Cristóbal López De Jesús 32
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
3.5 Sistemas Tipo Takagi Sugeno.
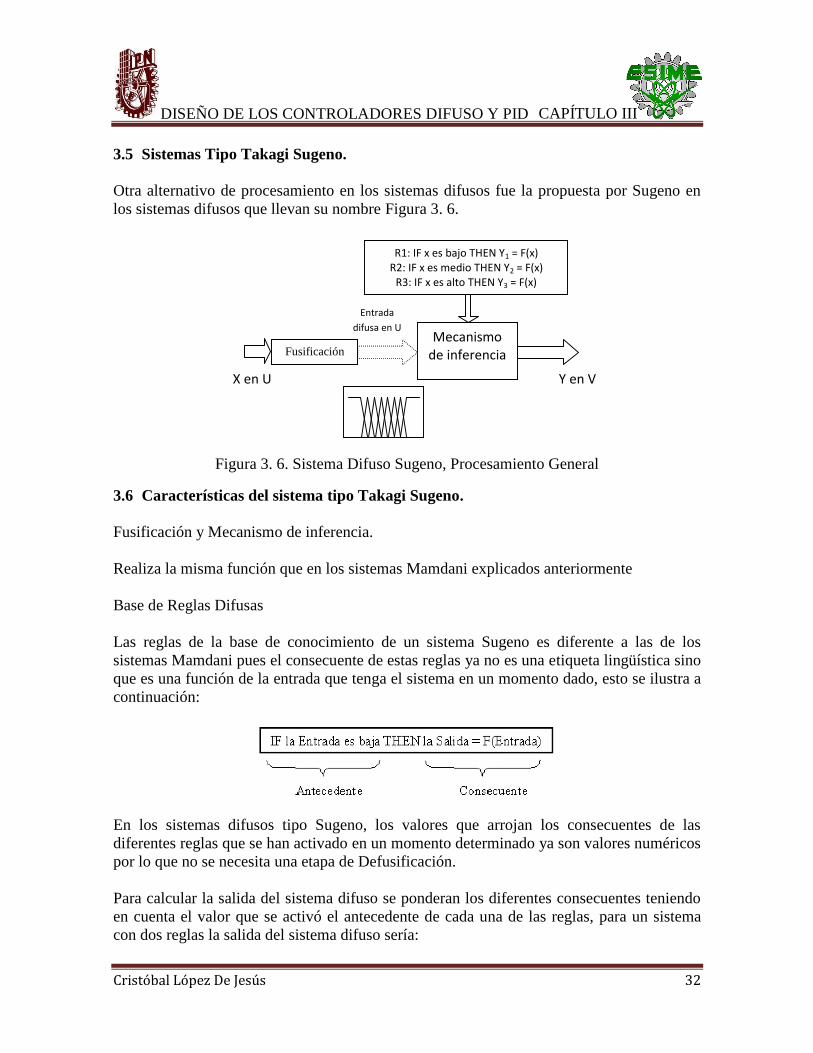
Otra alternativo de procesamiento en los sistemas difusos fue la propuesta por Sugeno enlos sistemas difusos que llevan su nombre Figura 3. 6.
Figura 3. 6. Sistema Difuso Sugeno, Procesamiento General
3.6 Características del sistema tipo Takagi Sugeno.
Fusificación y Mecanismo de inferencia.
Realiza la misma función que en los sistemas Mamdani explicados anteriormente
Base de Reglas Difusas
Las reglas de la base de conocimiento de un sistema Sugeno es diferente a las de lossistemas Mamdani pues el consecuente de estas reglas ya no es una etiqueta lingüística sinoque es una función de la entrada que tenga el sistema en un momento dado, esto se ilustra acontinuación:
En los sistemas difusos tipo Sugeno, los valores que arrojan los consecuentes de lasdiferentes reglas que se han activado en un momento determinado ya son valores numéricospor lo que no se necesita una etapa de Defusificación.
Para calcular la salida del sistema difuso se ponderan los diferentes consecuentes teniendoen cuenta el valor que se activó el antecedente de cada una de las reglas, para un sistemacon dos reglas la salida del sistema difuso sería:
R1: IF x es bajo THEN Y1 = F(x)R2: IF x es medio THEN Y2 = F(x)
R3: IF x es alto THEN Y3 = F(x)
Mecanismode inferenciaFusificación
X en U Y en V
Entradadifusa en U

Cristóbal López De Jesús 33
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
Cálculo de la Salida de un Sistema Difuso Sugeno
En este caso:
Serían las funciones que permiten calcular el consecuente de cada una de las dos reglasimplicadas.
En la Figura 3. 7 se muestra de manera más detallada como es el funcionamiento de unsistema difuso Sugeno.
Figura 3. 7. Sistema Difuso Sugeno, Procesamiento Detallado
3.7 Controles Difuso y PID.
En el presente trabajo, se muestran como el rendimiento de un control PID puede serigualado y excedido por un Control Difuso en aplicaciones que requieren una muy altaprecisión y estabilidad. Trabajos previos han demostrado que los controladores difusospermiten alcanzar precisiones muy altas, lo que en la mayoría de los casos contradice laintuición de los ingenieros que no están relacionados con este tipo de técnicas [7]. Serealiza una comparación profunda entre estos dos tipos de control y se establecen lasventajas y desventajas de cada uno de ellos en esta aplicación Figura 3. 8.
Cristóbal López De Jesús 34
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
a) Control Difuso. b) Control PID.
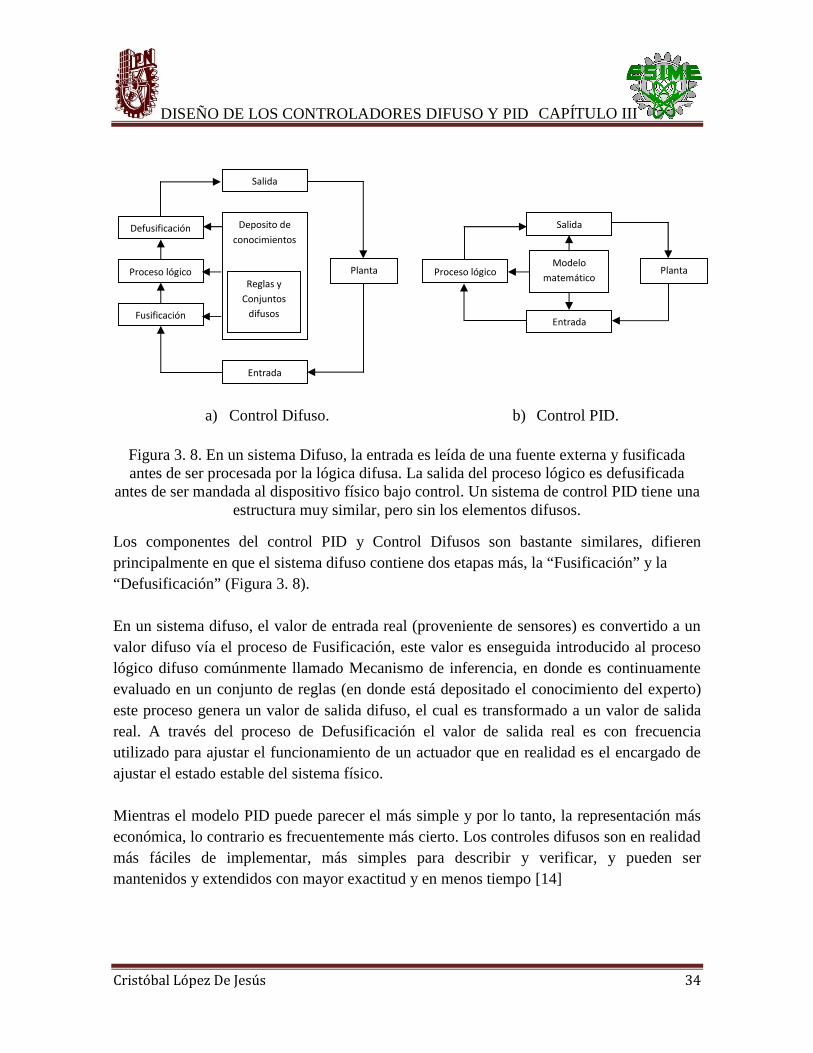
Figura 3. 8. En un sistema Difuso, la entrada es leída de una fuente externa y fusificadaantes de ser procesada por la lógica difusa. La salida del proceso lógico es defusificada
antes de ser mandada al dispositivo físico bajo control. Un sistema de control PID tiene unaestructura muy similar, pero sin los elementos difusos.
Los componentes del control PID y Control Difusos son bastante similares, difierenprincipalmente en que el sistema difuso contiene dos etapas más, la “Fusificación” y la“Defusificación” (Figura 3. 8).
En un sistema difuso, el valor de entrada real (proveniente de sensores) es convertido a unvalor difuso vía el proceso de Fusificación, este valor es enseguida introducido al procesológico difuso comúnmente llamado Mecanismo de inferencia, en donde es continuamenteevaluado en un conjunto de reglas (en donde está depositado el conocimiento del experto)este proceso genera un valor de salida difuso, el cual es transformado a un valor de salidareal. A través del proceso de Defusificación el valor de salida real es con frecuenciautilizado para ajustar el funcionamiento de un actuador que en realidad es el encargado deajustar el estado estable del sistema físico.
Mientras el modelo PID puede parecer el más simple y por lo tanto, la representación máseconómica, lo contrario es frecuentemente más cierto. Los controles difusos son en realidadmás fáciles de implementar, más simples para describir y verificar, y pueden sermantenidos y extendidos con mayor exactitud y en menos tiempo [14]
Deposito deconocimientos
Reglas yConjuntos
difusos
Planta
Salida
Defusificación
Proceso lógico
Fusificación
Entrada
Planta
Salida
Proceso lógico
Entrada
Modelomatemático
Cristóbal López De Jesús 35
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
3.8 Diseño del control difuso PD.
Para el controlador difuso igual que otros controladores, se toman los valores de lasvariables medibles, los cuales se procesan, y generan las salidas del controlador a fin demodificar apropiadamente la dinámica de la planta.
Como su nombre lo indica Control Difuso utiliza sistemas basados en reglas, que empleanlógica difusa, como elemento central.
Dado su estado, y los valores de las variables de entrada, estos sistemas evalúan laveracidad de cada regla, y así toman decisiones sobre los cambios a realizar en las variablesde salida. Una vez actualizadas las mismas, estas producirán un cambio sobre la planta,luego se vuelven a obtener los valores de las variables de entrada, comenzando un nuevociclo del sistema en lazo cerrado.
La diferencia esencial es que no procesan ecuaciones, procesan reglas para decidir comocambiar las salidas. Esto lo hace una técnica muy accesible, ya que las reglas están máscerca del sentido común que las ecuaciones y los modelos [8].
3.9 Definición de variables.
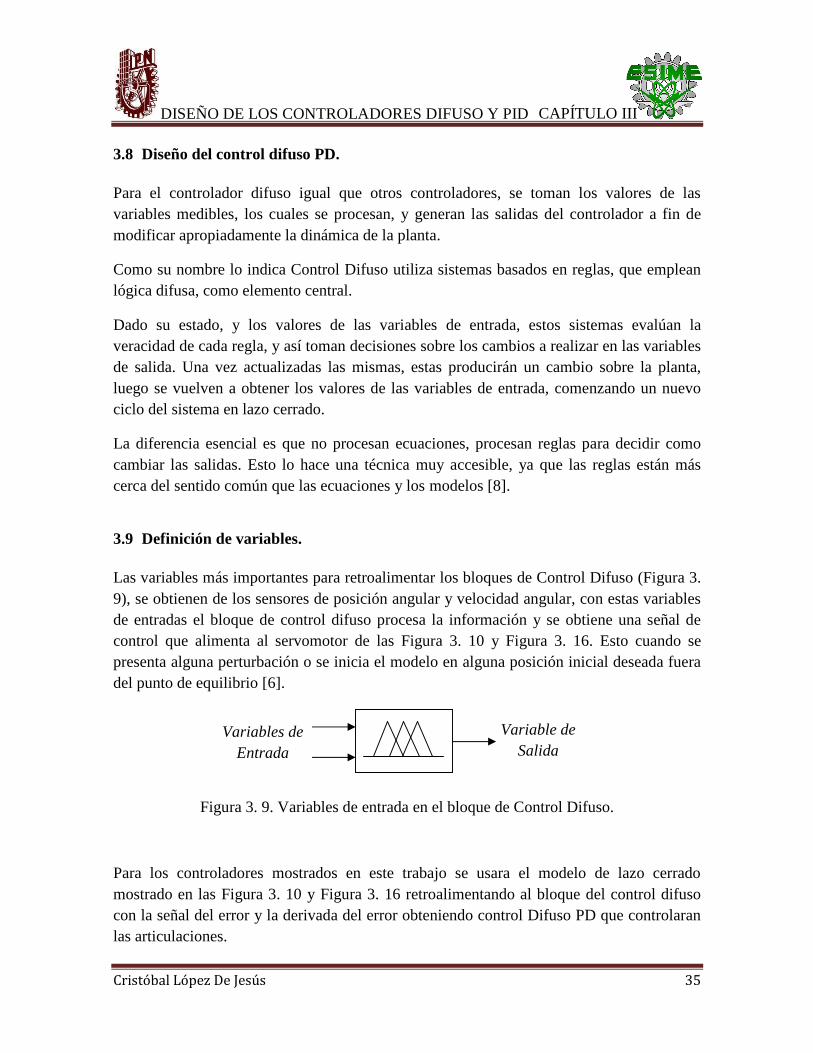
Las variables más importantes para retroalimentar los bloques de Control Difuso (Figura 3.9), se obtienen de los sensores de posición angular y velocidad angular, con estas variablesde entradas el bloque de control difuso procesa la información y se obtiene una señal decontrol que alimenta al servomotor de las Figura 3. 10 y Figura 3. 16. Esto cuando sepresenta alguna perturbación o se inicia el modelo en alguna posición inicial deseada fueradel punto de equilibrio [6].
Figura 3. 9. Variables de entrada en el bloque de Control Difuso.
Para los controladores mostrados en este trabajo se usara el modelo de lazo cerradomostrado en las Figura 3. 10 y Figura 3. 16 retroalimentando al bloque del control difusocon la señal del error y la derivada del error obteniendo control Difuso PD que controlaranlas articulaciones.
Variables deEntrada
Variable deSalida
Cristóbal López De Jesús 36
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
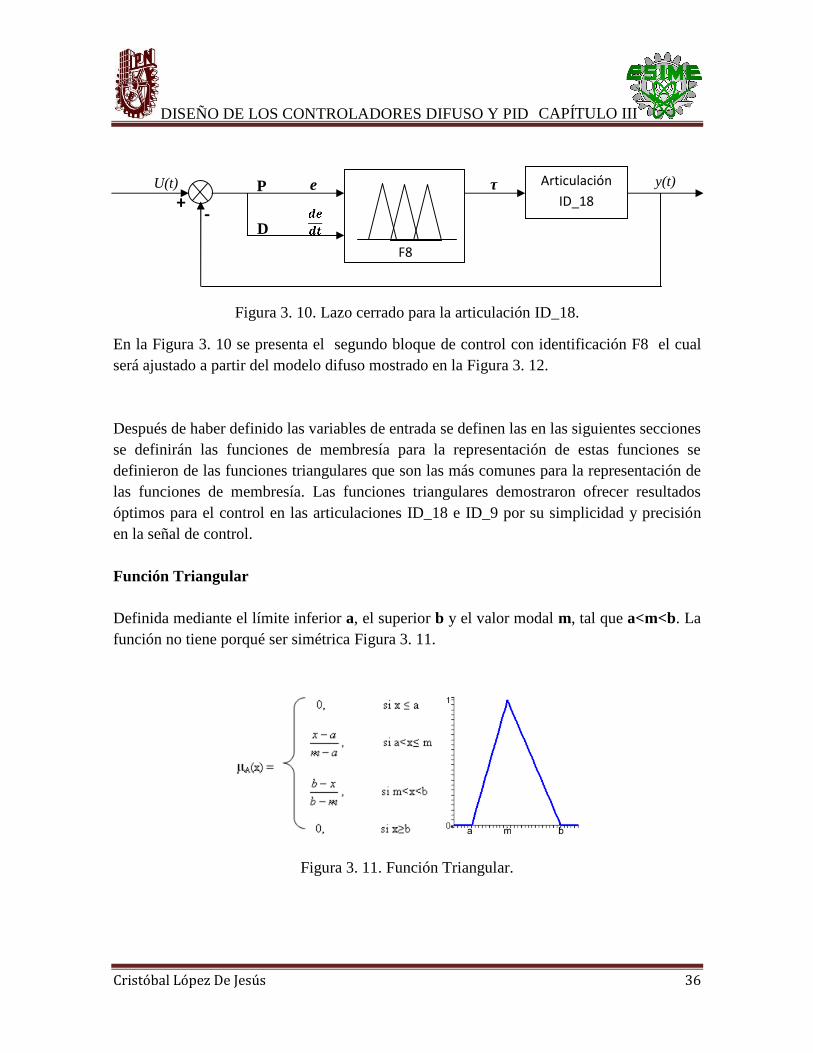
Figura 3. 10. Lazo cerrado para la articulación ID_18.
En la Figura 3. 10 se presenta el segundo bloque de control con identificación F8 el cualserá ajustado a partir del modelo difuso mostrado en la Figura 3. 12.
Después de haber definido las variables de entrada se definen las en las siguientes seccionesse definirán las funciones de membresía para la representación de estas funciones sedefinieron de las funciones triangulares que son las más comunes para la representación delas funciones de membresía. Las funciones triangulares demostraron ofrecer resultadosóptimos para el control en las articulaciones ID_18 e ID_9 por su simplicidad y precisiónen la señal de control.
Función Triangular
Definida mediante el límite inferior a, el superior b y el valor modal m, tal que a<m<b. Lafunción no tiene porqué ser simétrica Figura 3. 11.
Figura 3. 11. Función Triangular.
ArticulaciónID_18+
-
U(t) y(t)e τ
F8
P
D
Cristóbal López De Jesús 37
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
3.9.1 Articulación ID_18 Control Difuso PD.
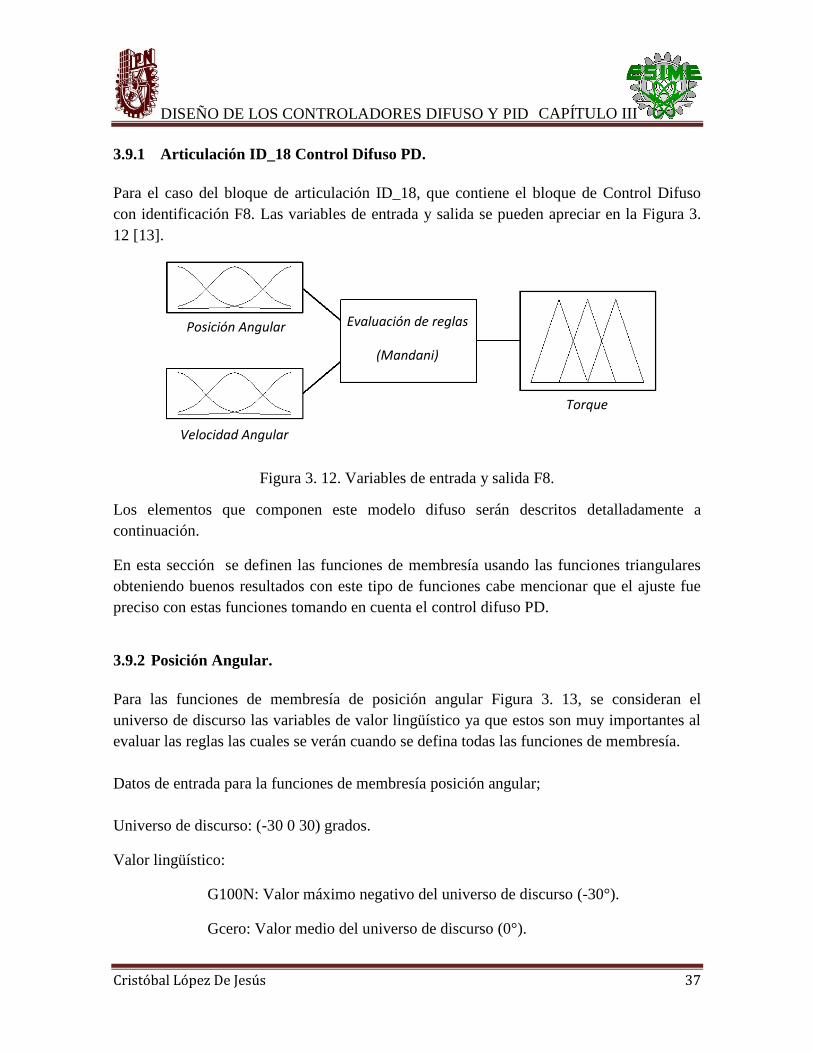
Para el caso del bloque de articulación ID_18, que contiene el bloque de Control Difusocon identificación F8. Las variables de entrada y salida se pueden apreciar en la Figura 3.12 [13].
Figura 3. 12. Variables de entrada y salida F8.
Los elementos que componen este modelo difuso serán descritos detalladamente acontinuación.
En esta sección se definen las funciones de membresía usando las funciones triangularesobteniendo buenos resultados con este tipo de funciones cabe mencionar que el ajuste fuepreciso con estas funciones tomando en cuenta el control difuso PD.
3.9.2 Posición Angular.
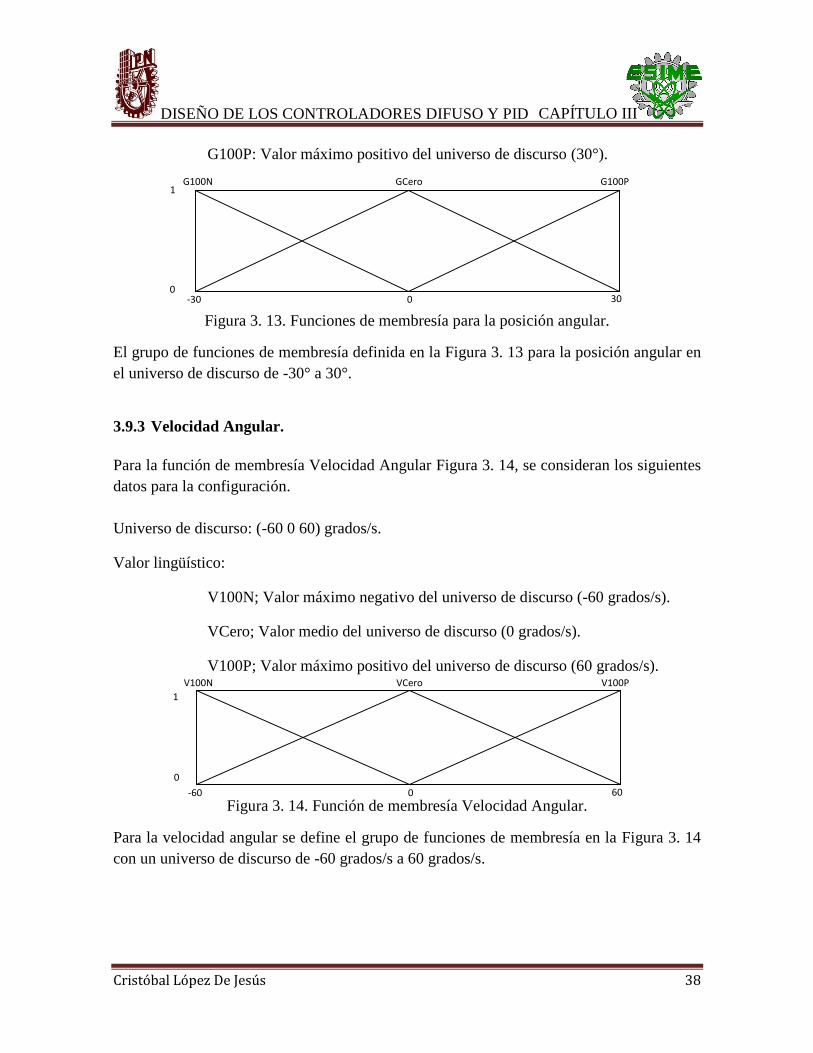
Para las funciones de membresía de posición angular Figura 3. 13, se consideran eluniverso de discurso las variables de valor lingüístico ya que estos son muy importantes alevaluar las reglas las cuales se verán cuando se defina todas las funciones de membresía.
Datos de entrada para la funciones de membresía posición angular;
Universo de discurso: (-30 0 30) grados.
Valor lingüístico:
G100N: Valor máximo negativo del universo de discurso (-30°).
Gcero: Valor medio del universo de discurso (0°).
Velocidad Angular
Posición Angular Evaluación de reglas
(Mandani)
Torque
Cristóbal López De Jesús 38
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
G100P: Valor máximo positivo del universo de discurso (30°).
Figura 3. 13. Funciones de membresía para la posición angular.
El grupo de funciones de membresía definida en la Figura 3. 13 para la posición angular enel universo de discurso de -30° a 30°.
3.9.3 Velocidad Angular.
Para la función de membresía Velocidad Angular Figura 3. 14, se consideran los siguientesdatos para la configuración.
Universo de discurso: (-60 0 60) grados/s.
Valor lingüístico:
V100N; Valor máximo negativo del universo de discurso (-60 grados/s).
VCero; Valor medio del universo de discurso (0 grados/s).
V100P; Valor máximo positivo del universo de discurso (60 grados/s).
Figura 3. 14. Función de membresía Velocidad Angular.
Para la velocidad angular se define el grupo de funciones de membresía en la Figura 3. 14con un universo de discurso de -60 grados/s a 60 grados/s.
0
1
0-30 30
G100N G100PGCero
0-60 60
V100N V100PVCero
0
1
Cristóbal López De Jesús 39
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
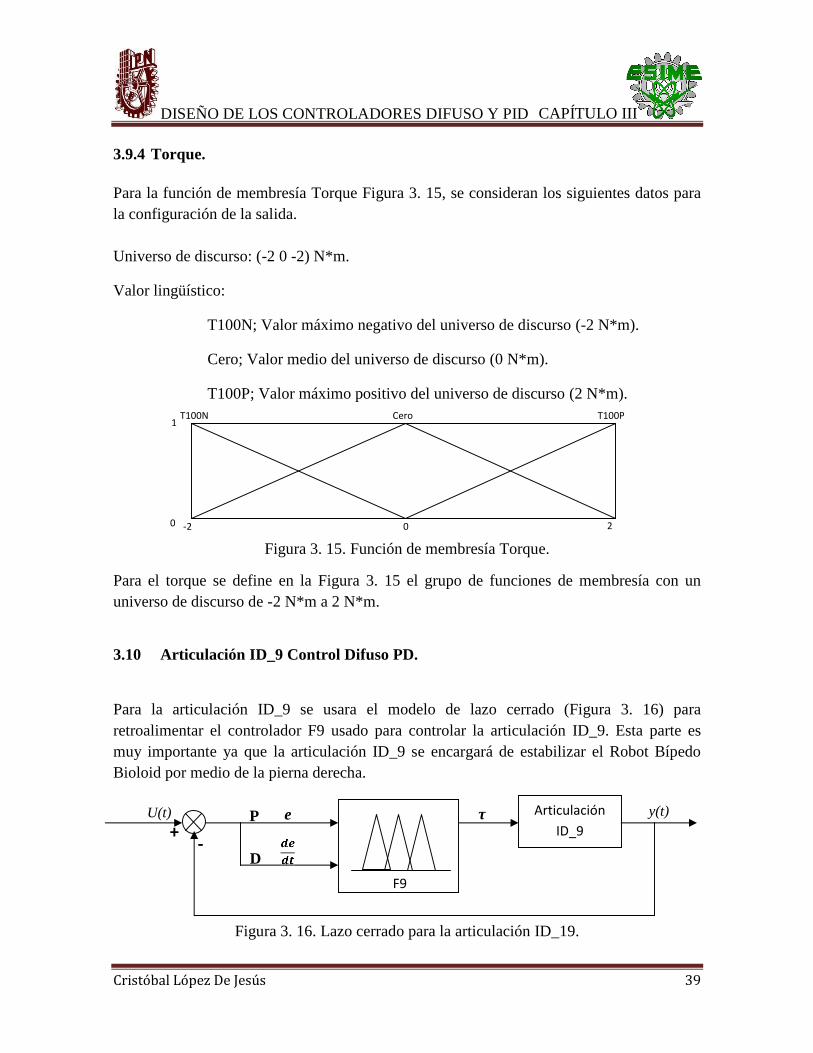
3.9.4 Torque.
Para la función de membresía Torque Figura 3. 15, se consideran los siguientes datos parala configuración de la salida.
Universo de discurso: (-2 0 -2) N*m.
Valor lingüístico:
T100N; Valor máximo negativo del universo de discurso (-2 N*m).
Cero; Valor medio del universo de discurso (0 N*m).
T100P; Valor máximo positivo del universo de discurso (2 N*m).
Figura 3. 15. Función de membresía Torque.
Para el torque se define en la Figura 3. 15 el grupo de funciones de membresía con ununiverso de discurso de -2 N*m a 2 N*m.
3.10 Articulación ID_9 Control Difuso PD.
Para la articulación ID_9 se usara el modelo de lazo cerrado (Figura 3. 16) pararetroalimentar el controlador F9 usado para controlar la articulación ID_9. Esta parte esmuy importante ya que la articulación ID_9 se encargará de estabilizar el Robot BípedoBioloid por medio de la pierna derecha.
Figura 3. 16. Lazo cerrado para la articulación ID_19.
ArticulaciónID_9+
-
U(t) y(t)e τ
F9
P
D
0
1
0-2 2
T100N T100PCero
Cristóbal López De Jesús 40
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
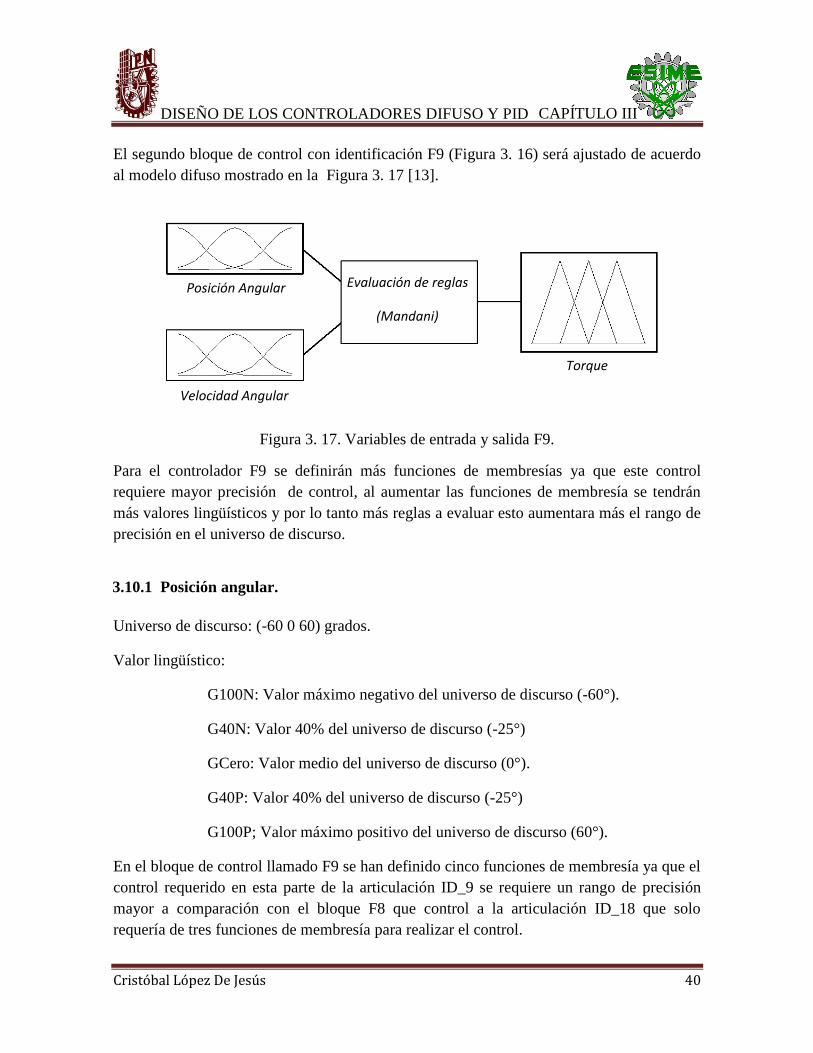
El segundo bloque de control con identificación F9 (Figura 3. 16) será ajustado de acuerdoal modelo difuso mostrado en la Figura 3. 17 [13].
Figura 3. 17. Variables de entrada y salida F9.
Para el controlador F9 se definirán más funciones de membresías ya que este controlrequiere mayor precisión de control, al aumentar las funciones de membresía se tendránmás valores lingüísticos y por lo tanto más reglas a evaluar esto aumentara más el rango deprecisión en el universo de discurso.
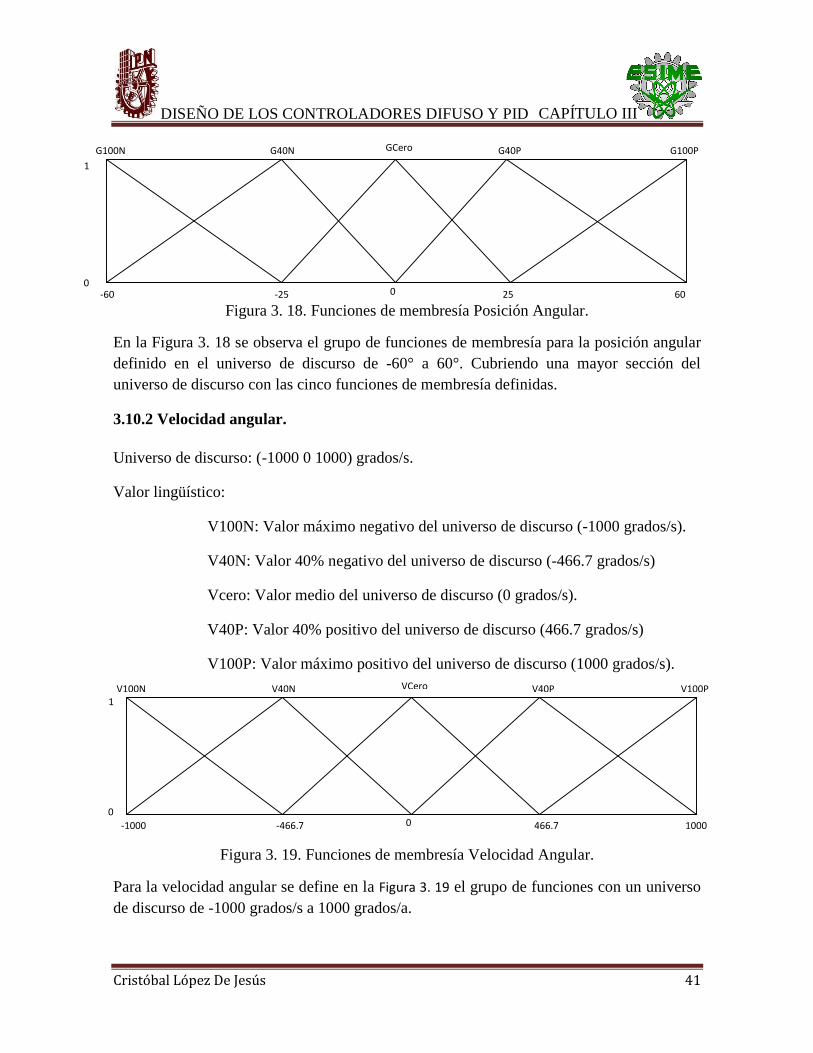
3.10.1 Posición angular.
Universo de discurso: (-60 0 60) grados.
Valor lingüístico:
G100N: Valor máximo negativo del universo de discurso (-60°).
G40N: Valor 40% del universo de discurso (-25°)
GCero: Valor medio del universo de discurso (0°).
G40P: Valor 40% del universo de discurso (-25°)
G100P; Valor máximo positivo del universo de discurso (60°).
En el bloque de control llamado F9 se han definido cinco funciones de membresía ya que elcontrol requerido en esta parte de la articulación ID_9 se requiere un rango de precisiónmayor a comparación con el bloque F8 que control a la articulación ID_18 que solorequería de tres funciones de membresía para realizar el control.
Velocidad Angular
Posición Angular Evaluación de reglas
(Mandani)
Torque
Cristóbal López De Jesús 41
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
Figura 3. 18. Funciones de membresía Posición Angular.
En la Figura 3. 18 se observa el grupo de funciones de membresía para la posición angulardefinido en el universo de discurso de -60° a 60°. Cubriendo una mayor sección deluniverso de discurso con las cinco funciones de membresía definidas.
3.10.2 Velocidad angular.
Universo de discurso: (-1000 0 1000) grados/s.
Valor lingüístico:
V100N: Valor máximo negativo del universo de discurso (-1000 grados/s).
V40N: Valor 40% negativo del universo de discurso (-466.7 grados/s)
Vcero: Valor medio del universo de discurso (0 grados/s).
V40P: Valor 40% positivo del universo de discurso (466.7 grados/s)
V100P: Valor máximo positivo del universo de discurso (1000 grados/s).
Figura 3. 19. Funciones de membresía Velocidad Angular.
Para la velocidad angular se define en la Figura 3. 19 el grupo de funciones con un universode discurso de -1000 grados/s a 1000 grados/a.
0
1V100N V40N VCero V40P V100P
-1000 -466.7 0 466.7 1000
0
1
G100N G40N GCero G40P G100P
-60 -25 0 25 60
Cristóbal López De Jesús 42
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
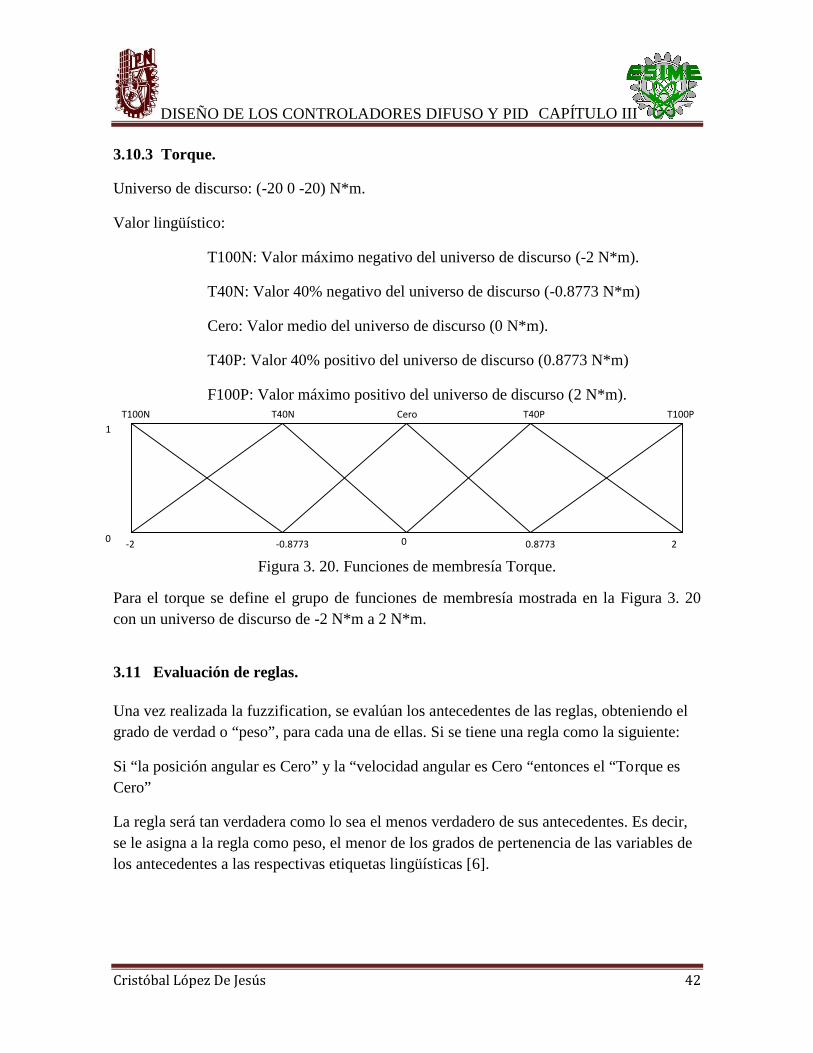
3.10.3 Torque.
Universo de discurso: (-20 0 -20) N*m.
Valor lingüístico:
T100N: Valor máximo negativo del universo de discurso (-2 N*m).
T40N: Valor 40% negativo del universo de discurso (-0.8773 N*m)
Cero: Valor medio del universo de discurso (0 N*m).
T40P: Valor 40% positivo del universo de discurso (0.8773 N*m)
F100P: Valor máximo positivo del universo de discurso (2 N*m).
Figura 3. 20. Funciones de membresía Torque.
Para el torque se define el grupo de funciones de membresía mostrada en la Figura 3. 20con un universo de discurso de -2 N*m a 2 N*m.
3.11 Evaluación de reglas.
Una vez realizada la fuzzification, se evalúan los antecedentes de las reglas, obteniendo elgrado de verdad o “peso”, para cada una de ellas. Si se tiene una regla como la siguiente:
Si “la posición angular es Cero” y la “velocidad angular es Cero “entonces el “Torque esCero”
La regla será tan verdadera como lo sea el menos verdadero de sus antecedentes. Es decir,se le asigna a la regla como peso, el menor de los grados de pertenencia de las variables delos antecedentes a las respectivas etiquetas lingüísticas [6].
0
1T100N T40N Cero T40P T100P
-2 -0.8773 0 0.8773 2
Cristóbal López De Jesús 43
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
3.11.1 Evaluación de reglas bloque F8.
Esta sección describe la parte central del controlador difuso, nos referimos a la base deconocimientos, punto de partida para la generación del conjunto de reglas sobre las que serigen la inferencia. Existen dos tipos de métodos de inferencia que pueden serimplementados en el Fuzzy Logic Toolbox el método Mamdani y Sugeno en este caso seusara el método Mandani.
El método Mamdani utiliza los grados de membresía de las variables de entrada que segeneraron en la Fusificación y se aplican sobre las reglas de la base de conocimiento paradeterminar su grado de membresía en los conjuntos difuso de la variable de salida.
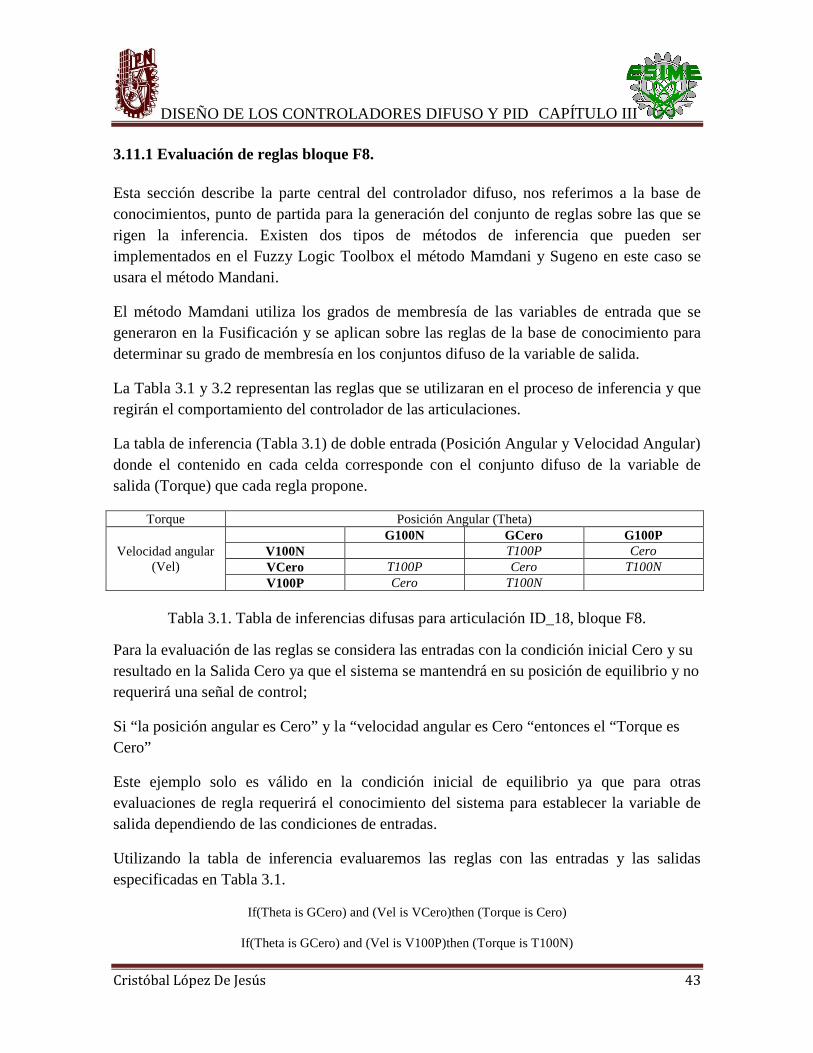
La Tabla 3.1 y 3.2 representan las reglas que se utilizaran en el proceso de inferencia y queregirán el comportamiento del controlador de las articulaciones.
La tabla de inferencia (Tabla 3.1) de doble entrada (Posición Angular y Velocidad Angular)donde el contenido en cada celda corresponde con el conjunto difuso de la variable desalida (Torque) que cada regla propone.
Torque Posición Angular (Theta)
Velocidad angular(Vel)
G100N GCero G100PV100N T100P CeroVCero T100P Cero T100NV100P Cero T100N
Tabla 3.1. Tabla de inferencias difusas para articulación ID_18, bloque F8.
Para la evaluación de las reglas se considera las entradas con la condición inicial Cero y suresultado en la Salida Cero ya que el sistema se mantendrá en su posición de equilibrio y norequerirá una señal de control;
Si “la posición angular es Cero” y la “velocidad angular es Cero “entonces el “Torque esCero”
Este ejemplo solo es válido en la condición inicial de equilibrio ya que para otrasevaluaciones de regla requerirá el conocimiento del sistema para establecer la variable desalida dependiendo de las condiciones de entradas.
Utilizando la tabla de inferencia evaluaremos las reglas con las entradas y las salidasespecificadas en Tabla 3.1.
If(Theta is GCero) and (Vel is VCero)then (Torque is Cero)
If(Theta is GCero) and (Vel is V100P)then (Torque is T100N)
Cristóbal López De Jesús 44
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
If(Theta is GCero) and (Vel is V100N)then (Torque is T100P)
If(Theta is G100N) and (Vel is VCero)then (Torque is T100P)
If(Theta is G100N) and (Vel is V100P)then (Torque is Cero)
If(Theta is G100P) and (Vel is VCero)then (Torque is T100N)
If(Theta is G100P) and (Vel is V100N)then (Torque is Cero)
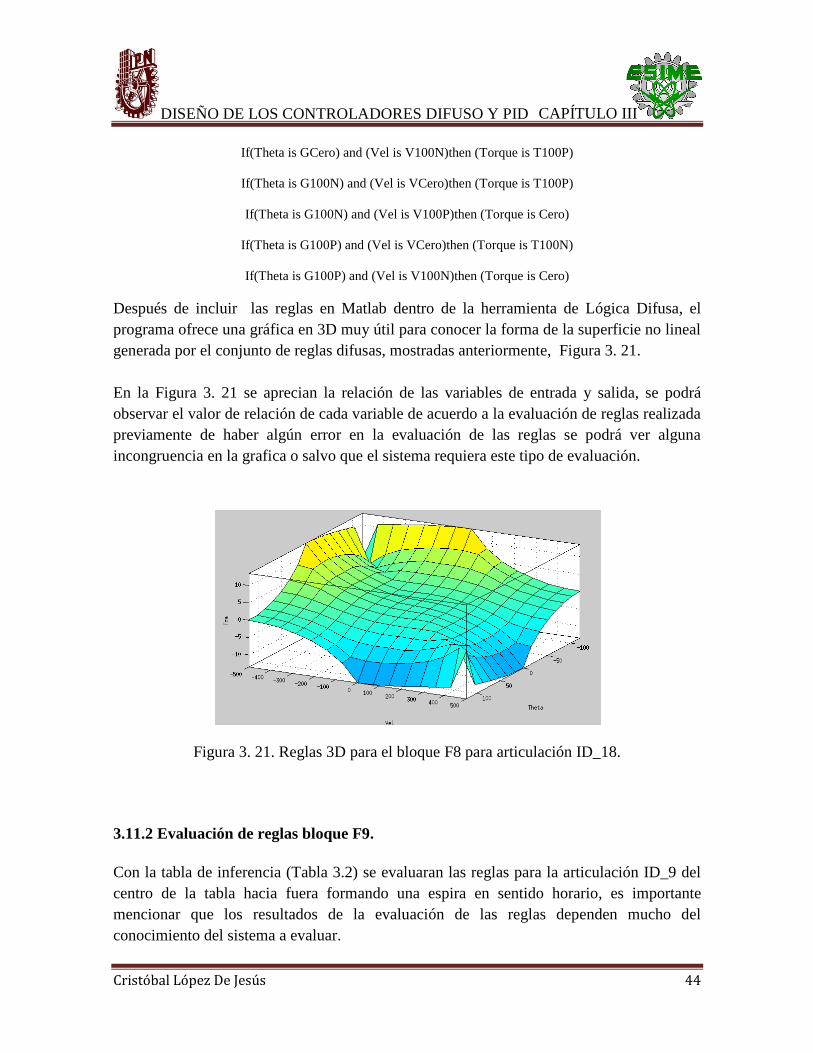
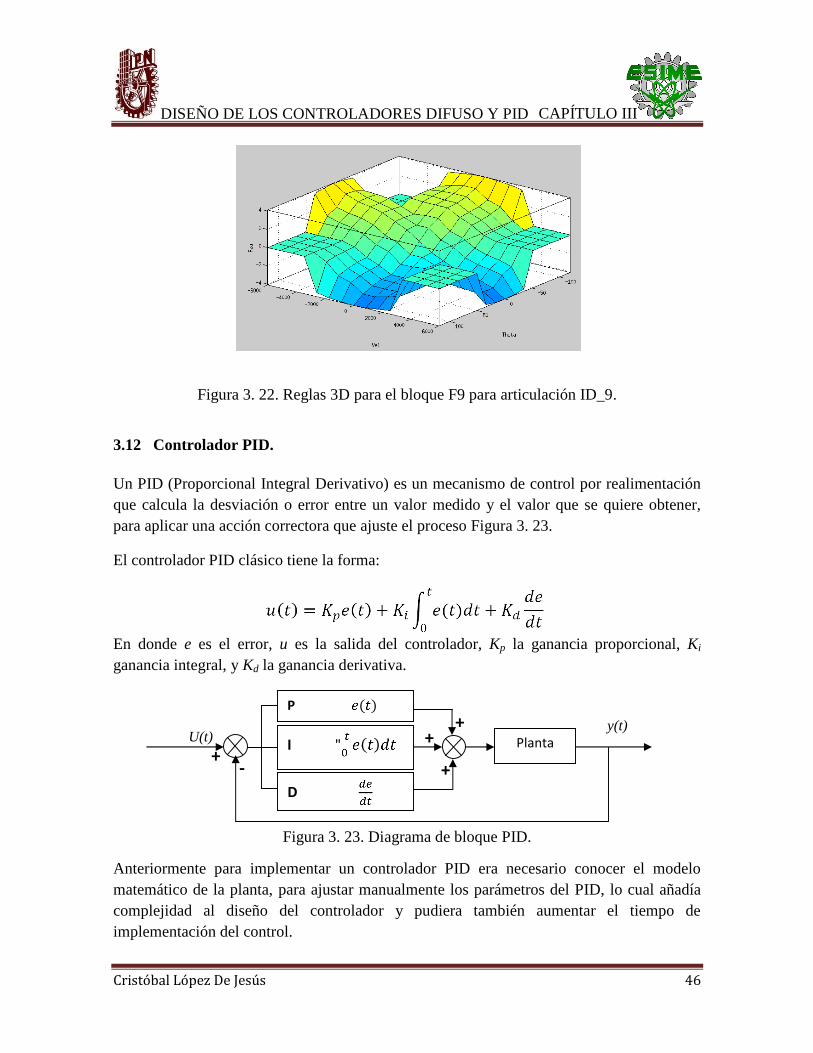
Después de incluir las reglas en Matlab dentro de la herramienta de Lógica Difusa, elprograma ofrece una gráfica en 3D muy útil para conocer la forma de la superficie no linealgenerada por el conjunto de reglas difusas, mostradas anteriormente, Figura 3. 21.
En la Figura 3. 21 se aprecian la relación de las variables de entrada y salida, se podráobservar el valor de relación de cada variable de acuerdo a la evaluación de reglas realizadapreviamente de haber algún error en la evaluación de las reglas se podrá ver algunaincongruencia en la grafica o salvo que el sistema requiera este tipo de evaluación.
Figura 3. 21. Reglas 3D para el bloque F8 para articulación ID_18.
3.11.2 Evaluación de reglas bloque F9.
Con la tabla de inferencia (Tabla 3.2) se evaluaran las reglas para la articulación ID_9 delcentro de la tabla hacia fuera formando una espira en sentido horario, es importantemencionar que los resultados de la evaluación de las reglas dependen mucho delconocimiento del sistema a evaluar.
Cristóbal López De Jesús 45
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
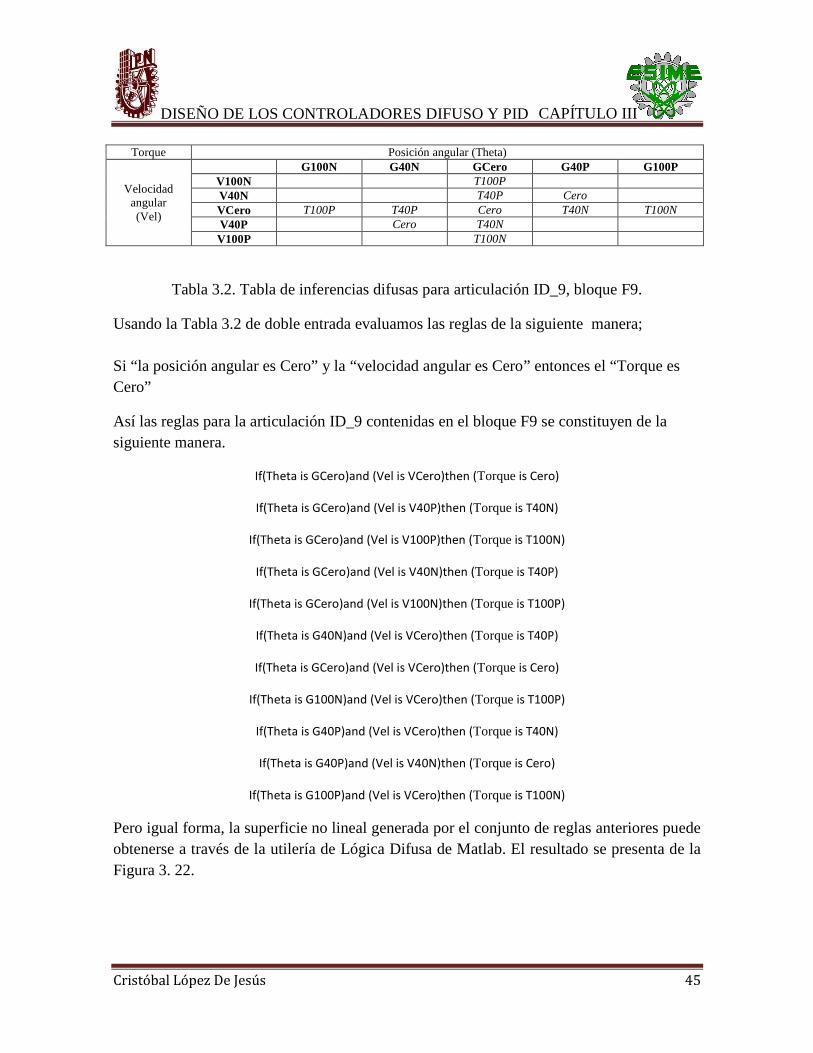
Torque Posición angular (Theta)
Velocidadangular(Vel)
G100N G40N GCero G40P G100PV100N T100PV40N T40P CeroVCero T100P T40P Cero T40N T100NV40P Cero T40NV100P T100N
Tabla 3.2. Tabla de inferencias difusas para articulación ID_9, bloque F9.
Usando la Tabla 3.2 de doble entrada evaluamos las reglas de la siguiente manera;
Si “la posición angular es Cero” y la “velocidad angular es Cero” entonces el “Torque esCero”
Así las reglas para la articulación ID_9 contenidas en el bloque F9 se constituyen de lasiguiente manera.
If(Theta is GCero)and (Vel is VCero)then (Torque is Cero)
If(Theta is GCero)and (Vel is V40P)then (Torque is T40N)
If(Theta is GCero)and (Vel is V100P)then (Torque is T100N)
If(Theta is GCero)and (Vel is V40N)then (Torque is T40P)
If(Theta is GCero)and (Vel is V100N)then (Torque is T100P)
If(Theta is G40N)and (Vel is VCero)then (Torque is T40P)
If(Theta is GCero)and (Vel is VCero)then (Torque is Cero)
If(Theta is G100N)and (Vel is VCero)then (Torque is T100P)
If(Theta is G40P)and (Vel is VCero)then (Torque is T40N)
If(Theta is G40P)and (Vel is V40N)then (Torque is Cero)
If(Theta is G100P)and (Vel is VCero)then (Torque is T100N)
Pero igual forma, la superficie no lineal generada por el conjunto de reglas anteriores puedeobtenerse a través de la utilería de Lógica Difusa de Matlab. El resultado se presenta de laFigura 3. 22.
Cristóbal López De Jesús 46
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
Figura 3. 22. Reglas 3D para el bloque F9 para articulación ID_9.
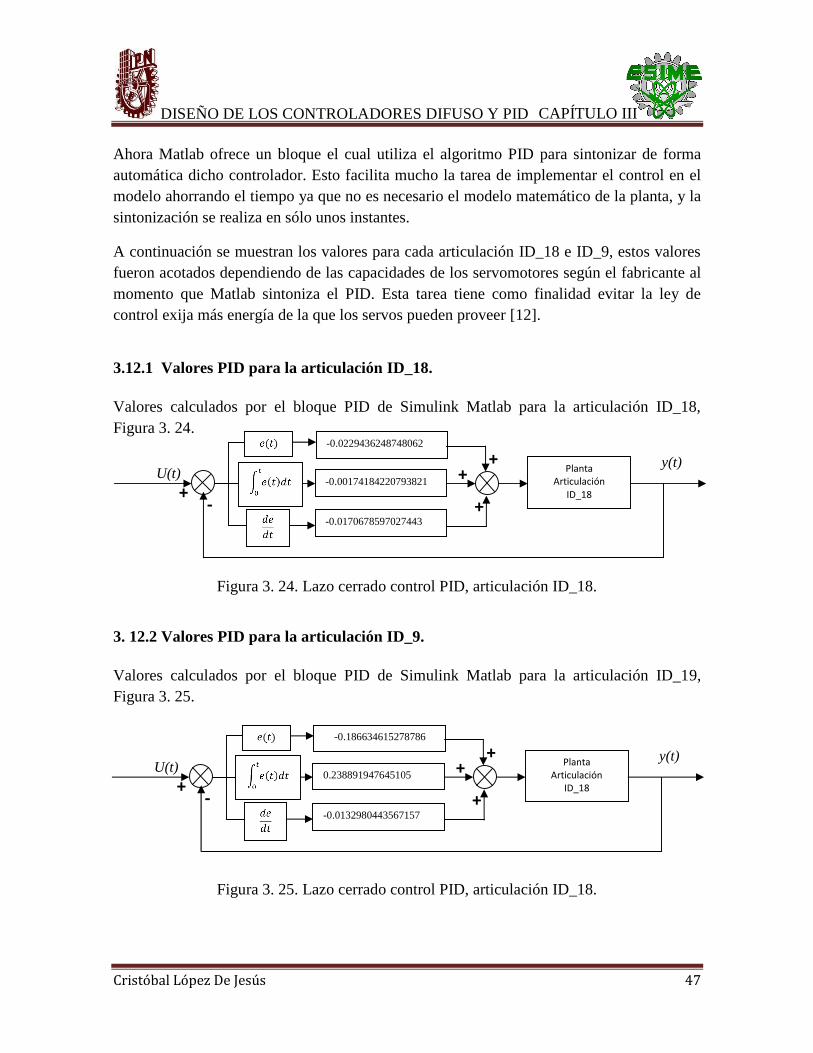
3.12 Controlador PID.
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentaciónque calcula la desviación o error entre un valor medido y el valor que se quiere obtener,para aplicar una acción correctora que ajuste el proceso Figura 3. 23.
El controlador PID clásico tiene la forma:
En donde e es el error, u es la salida del controlador, Kp la ganancia proporcional, Ki
ganancia integral, y Kd la ganancia derivativa.
Figura 3. 23. Diagrama de bloque PID.
Anteriormente para implementar un controlador PID era necesario conocer el modelomatemático de la planta, para ajustar manualmente los parámetros del PID, lo cual añadíacomplejidad al diseño del controlador y pudiera también aumentar el tiempo deimplementación del control.
Planta+
-
++
+
P ( )I ∫ ( )D
U(t)y(t)
Cristóbal López De Jesús 47
DISEÑO DE LOS CONTROLADORES DIFUSO Y PID CAPÍTULO III
Ahora Matlab ofrece un bloque el cual utiliza el algoritmo PID para sintonizar de formaautomática dicho controlador. Esto facilita mucho la tarea de implementar el control en elmodelo ahorrando el tiempo ya que no es necesario el modelo matemático de la planta, y lasintonización se realiza en sólo unos instantes.
A continuación se muestran los valores para cada articulación ID_18 e ID_9, estos valoresfueron acotados dependiendo de las capacidades de los servomotores según el fabricante almomento que Matlab sintoniza el PID. Esta tarea tiene como finalidad evitar la ley decontrol exija más energía de la que los servos pueden proveer [12].
3.12.1 Valores PID para la articulación ID_18.
Valores calculados por el bloque PID de Simulink Matlab para la articulación ID_18,Figura 3. 24.
Figura 3. 24. Lazo cerrado control PID, articulación ID_18.
3. 12.2 Valores PID para la articulación ID_9.
Valores calculados por el bloque PID de Simulink Matlab para la articulación ID_19,Figura 3. 25.
Figura 3. 25. Lazo cerrado control PID, articulación ID_18.
-0.0229436248748062
-0.00174184220793821
-0.0170678597027443
PlantaArticulación
ID_18+-
++
+
( )( )U(t)
y(t)
-0.186634615278786
0.238891947645105
-0.0132980443567157
PlantaArticulación
ID_18+-
++
+
( )( )U(t)
y(t)
Cristóbal López De Jesús 48
RESULTADOS CAPÍTULO IV
CAPÍTULO IVRESULTADOS
Después de diseñar los controladores Difuso y PID se realizaran las pruebascorrespondientes para evaluar los resultados de cada controlador y comparar cada resultadoestos serán analizados a detalle en el Capitulo V.
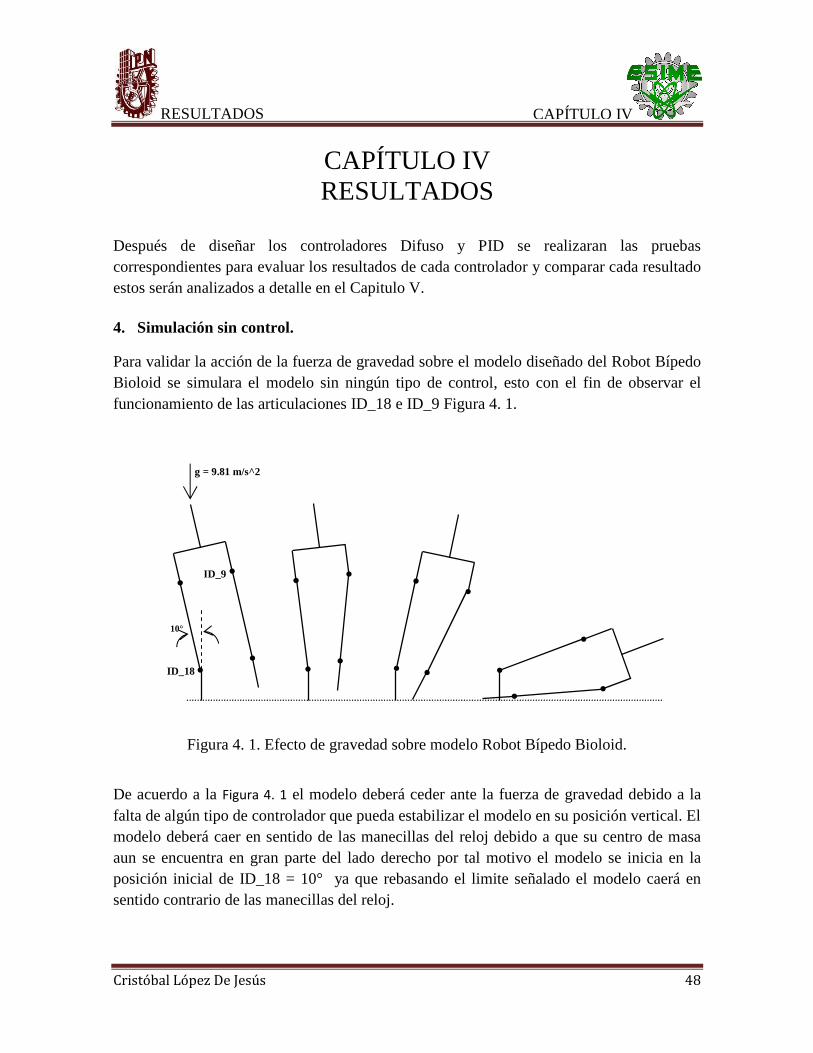
4. Simulación sin control.
Para validar la acción de la fuerza de gravedad sobre el modelo diseñado del Robot BípedoBioloid se simulara el modelo sin ningún tipo de control, esto con el fin de observar elfuncionamiento de las articulaciones ID_18 e ID_9 Figura 4. 1.
Figura 4. 1. Efecto de gravedad sobre modelo Robot Bípedo Bioloid.
De acuerdo a la Figura 4. 1 el modelo deberá ceder ante la fuerza de gravedad debido a lafalta de algún tipo de controlador que pueda estabilizar el modelo en su posición vertical. Elmodelo deberá caer en sentido de las manecillas del reloj debido a que su centro de masaaun se encuentra en gran parte del lado derecho por tal motivo el modelo se inicia en laposición inicial de ID_18 = 10° ya que rebasando el limite señalado el modelo caerá ensentido contrario de las manecillas del reloj.
ID_18
ID_9
g = 9.81 m/s^2
10°
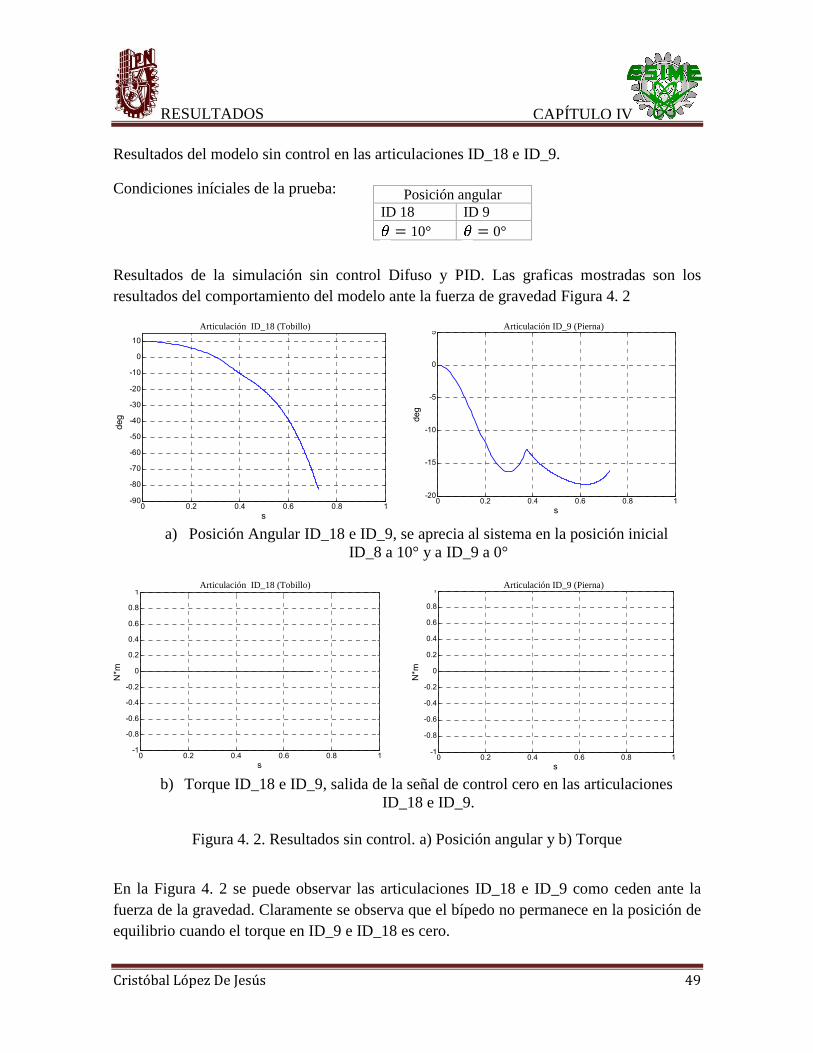
Cristóbal López De Jesús 49
RESULTADOS CAPÍTULO IV
Resultados del modelo sin control en las articulaciones ID_18 e ID_9.
Condiciones iníciales de la prueba:
Resultados de la simulación sin control Difuso y PID. Las graficas mostradas son losresultados del comportamiento del modelo ante la fuerza de gravedad Figura 4. 2
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
a) Posición Angular ID_18 e ID_9, se aprecia al sistema en la posición inicialID_8 a 10° y a ID_9 a 0°
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
b) Torque ID_18 e ID_9, salida de la señal de control cero en las articulacionesID_18 e ID_9.
Figura 4. 2. Resultados sin control. a) Posición angular y b) Torque
En la Figura 4. 2 se puede observar las articulaciones ID_18 e ID_9 como ceden ante lafuerza de la gravedad. Claramente se observa que el bípedo no permanece en la posición deequilibrio cuando el torque en ID_9 e ID_18 es cero.
0 0.2 0.4 0.6 0.8 1-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10
deg
s
Articulacion ID 18 (Tobillo)
0 0.2 0.4 0.6 0.8 1-20
-15
-10
-5
0
5
deg
s
Articulacion ID 9 (Pierna)
0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 18 (Tobillo)
0 0.2 0.4 0.6 0.8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 9 (Pierna)
Posición angularID 18 ID 9= 10° = 0°
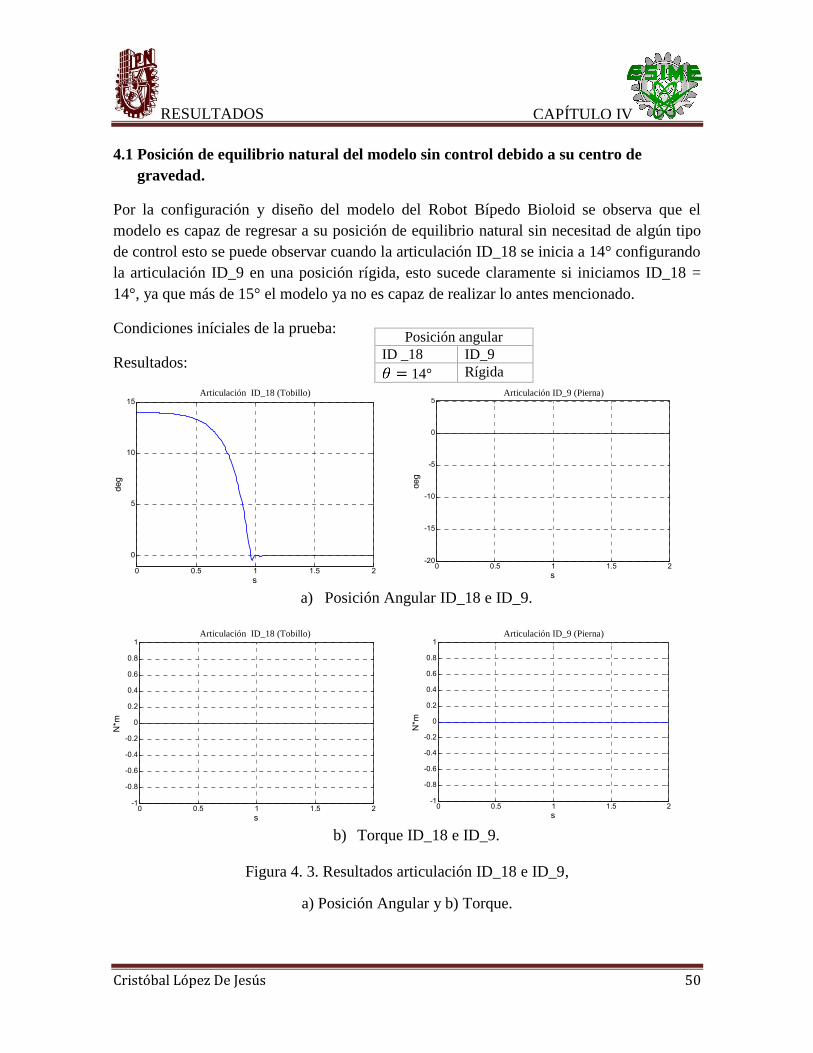
Cristóbal López De Jesús 50
RESULTADOS CAPÍTULO IV
4.1 Posición de equilibrio natural del modelo sin control debido a su centro degravedad.
Por la configuración y diseño del modelo del Robot Bípedo Bioloid se observa que elmodelo es capaz de regresar a su posición de equilibrio natural sin necesitad de algún tipode control esto se puede observar cuando la articulación ID_18 se inicia a 14° configurandola articulación ID_9 en una posición rígida, esto sucede claramente si iniciamos ID_18 =14°, ya que más de 15° el modelo ya no es capaz de realizar lo antes mencionado.
Condiciones iníciales de la prueba:
Resultados:
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
a) Posición Angular ID_18 e ID_9.
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
b) Torque ID_18 e ID_9.
Figura 4. 3. Resultados articulación ID_18 e ID_9,
a) Posición Angular y b) Torque.
0 0.5 1 1.5 2
0
5
10
15
deg
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-20
-15
-10
-5
0
5
deg
s
Articulacion ID 9 (Pierna)
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 9 (Pierna)
Posición angularID _18 ID_9= 14° Rígida
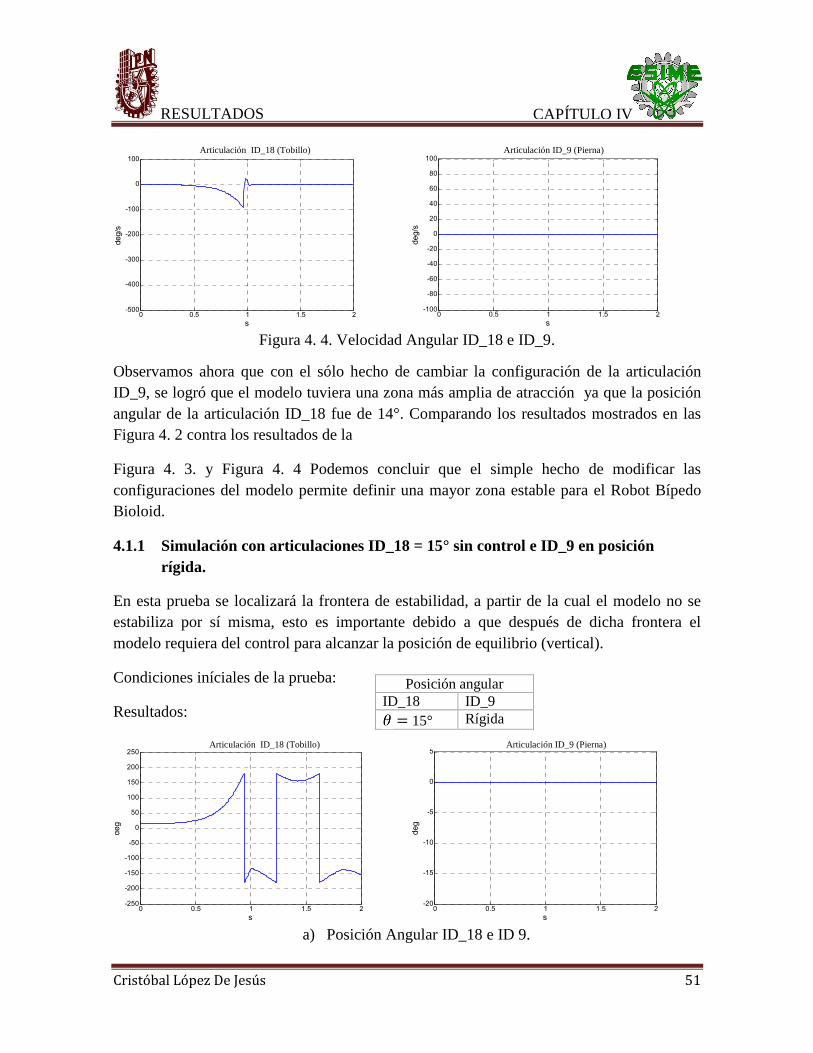
Cristóbal López De Jesús 51
RESULTADOS CAPÍTULO IV
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
Figura 4. 4. Velocidad Angular ID_18 e ID_9.
Observamos ahora que con el sólo hecho de cambiar la configuración de la articulaciónID_9, se logró que el modelo tuviera una zona más amplia de atracción ya que la posiciónangular de la articulación ID_18 fue de 14°. Comparando los resultados mostrados en lasFigura 4. 2 contra los resultados de la
Figura 4. 3. y Figura 4. 4 Podemos concluir que el simple hecho de modificar lasconfiguraciones del modelo permite definir una mayor zona estable para el Robot BípedoBioloid.
4.1.1 Simulación con articulaciones ID_18 = 15° sin control e ID_9 en posiciónrígida.
En esta prueba se localizará la frontera de estabilidad, a partir de la cual el modelo no seestabiliza por sí misma, esto es importante debido a que después de dicha frontera elmodelo requiera del control para alcanzar la posición de equilibrio (vertical).
Condiciones iníciales de la prueba:
Resultados:
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
a) Posición Angular ID_18 e ID 9.
0 0.5 1 1.5 2-500
-400
-300
-200
-100
0
100
deg/
s
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-100
-80
-60
-40
-20
0
20
40
60
80
100
deg/
s
s
Articulacion ID 9 (Pierna)
0 0.5 1 1.5 2-250
-200
-150
-100
-50
0
50
100
150
200
250
deg
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-20
-15
-10
-5
0
5
deg
s
Articulacion ID 9 (Pierna)
Posición angularID_18 ID_9= 15° Rígida
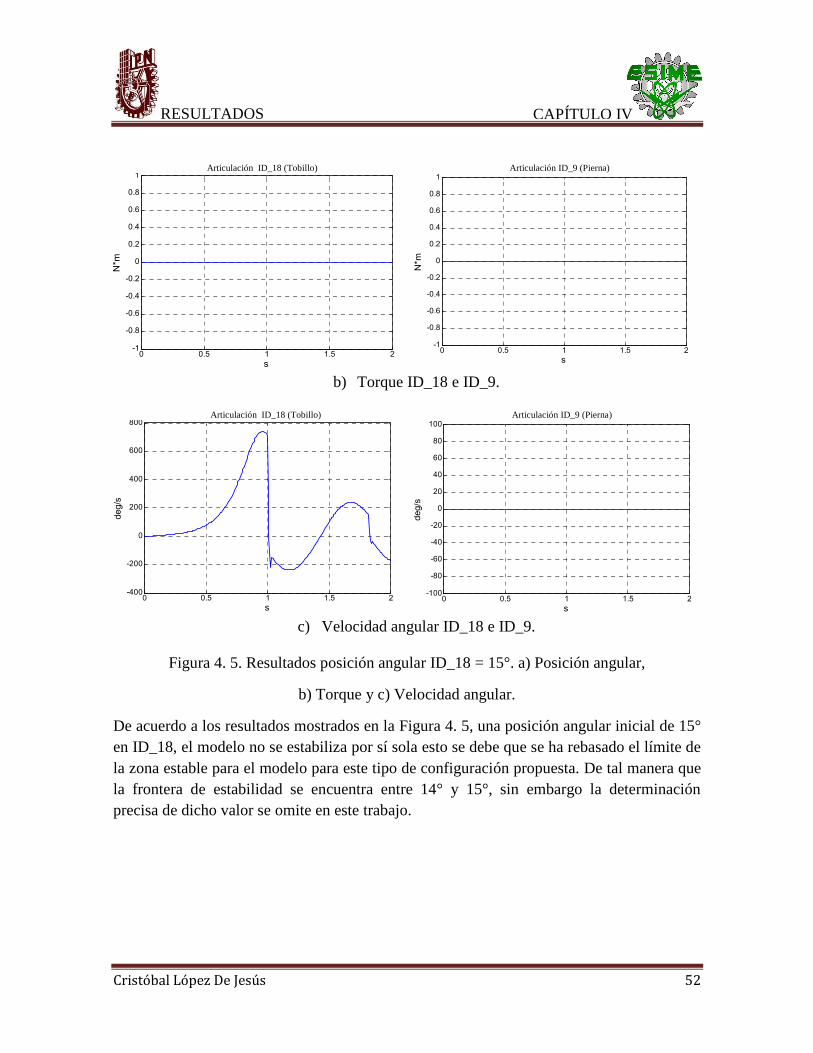
Cristóbal López De Jesús 52
RESULTADOS CAPÍTULO IV
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
b) Torque ID_18 e ID_9.
Articulación ID_18 (Tobillo) Articulación ID_9 (Pierna)
c) Velocidad angular ID_18 e ID_9.
Figura 4. 5. Resultados posición angular ID_18 = 15°. a) Posición angular,
b) Torque y c) Velocidad angular.
De acuerdo a los resultados mostrados en la Figura 4. 5, una posición angular inicial de 15°en ID_18, el modelo no se estabiliza por sí sola esto se debe que se ha rebasado el límite dela zona estable para el modelo para este tipo de configuración propuesta. De tal manera quela frontera de estabilidad se encuentra entre 14° y 15°, sin embargo la determinaciónprecisa de dicho valor se omite en este trabajo.
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 9 (Pierna)
0 0.5 1 1.5 2-400
-200
0
200
400
600
800
deg/
s
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-100
-80
-60
-40
-20
0
20
40
60
80
100de
g/s
s
Articulacion ID 9 (Pierna)

Cristóbal López De Jesús 53
RESULTADOS CAPÍTULO IV
4.2 Simulación con control en articulación ID_9.
A partir de esta sección se empezará a implementar Control Difuso por primera vez en elmodelo. También se comparan los resultados ofrecidos por el Control Difuso contra elcontrol PID, con la idea de enriquecer más los resultados y comprobar las ventajas queofrecen estos dos tipos de controles ante el modelo de un Robot Bípedo Bioloid. Losresultados se analizan a detalle en el Capítulo 5.
Como se demostró anteriormente (Figura 4. 5), para una posición angular de 15° en ID_18el modelo ya no es capaz por sí solo de regresar a una posición estable. Entonces partiendode la posición angular de 15° en ID_18 se aplicará control en ID_9 para mover el centro degravedad y estabilizar el modelo utilizando únicamente articulación ID_9. Al mismotiempo se encontrará el límite de la posición angular de ID_18 para este método de control.
4.2.1 Simulación con articulaciones ID_18 = 15° sin control e ID_9 con control conuna señal de referencia de 30°.
A partir de esta sección los resultados se comparan con el controlador Difuso y PIDiniciando con los resultados gráficos de las articulaciones ID_18 y después la articulaciónID_9.
Condiciones iníciales:
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 6. Posición angular. ID_18, Control Difuso V.S. PID.
0 0.5 1 1.5 20
5
10
15
20
deg
s0 0.5 1 1.5 2
0
5
10
15
20
deg
s
ID_18 ID_9Sin control Con Control= 15 ° = 0°

Cristóbal López De Jesús 54
RESULTADOS CAPÍTULO IV
En la Figura 4. 6 se observan los resultados de la articulación ID_18, aclarando que laarticulación ID_18 no tiene control directamente en su articulación, al contrario de laarticulación ID_9 que si cuenta con control.
Continuando con la articulación ID_18 la señal de control es nula para esta prueba y por lotanto el torque es cero para la articulación mencionada, también se aprecia una señal de lavelocidad angular esto se debe al efecto de la articulación ID_9 sobre la articulación ID_18.Este resultado es cuando la pierna derecha amplia la zona de estabilidad con la ayuda de laarticulación ID_9 y por lo tanto afecta a la pierna izquierda controlada por la articulaciónID_18 ver Figura 4. 7.
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Torque. ID_18, Control Difuso V.S. PID.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Velocidad angular. ID_18, Control Difuso V.S. PID.
Figura 4. 7. Resultados articulación ID_18 sin control. a) Torque y b) Velocidad Angular.
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2N
*m
s
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
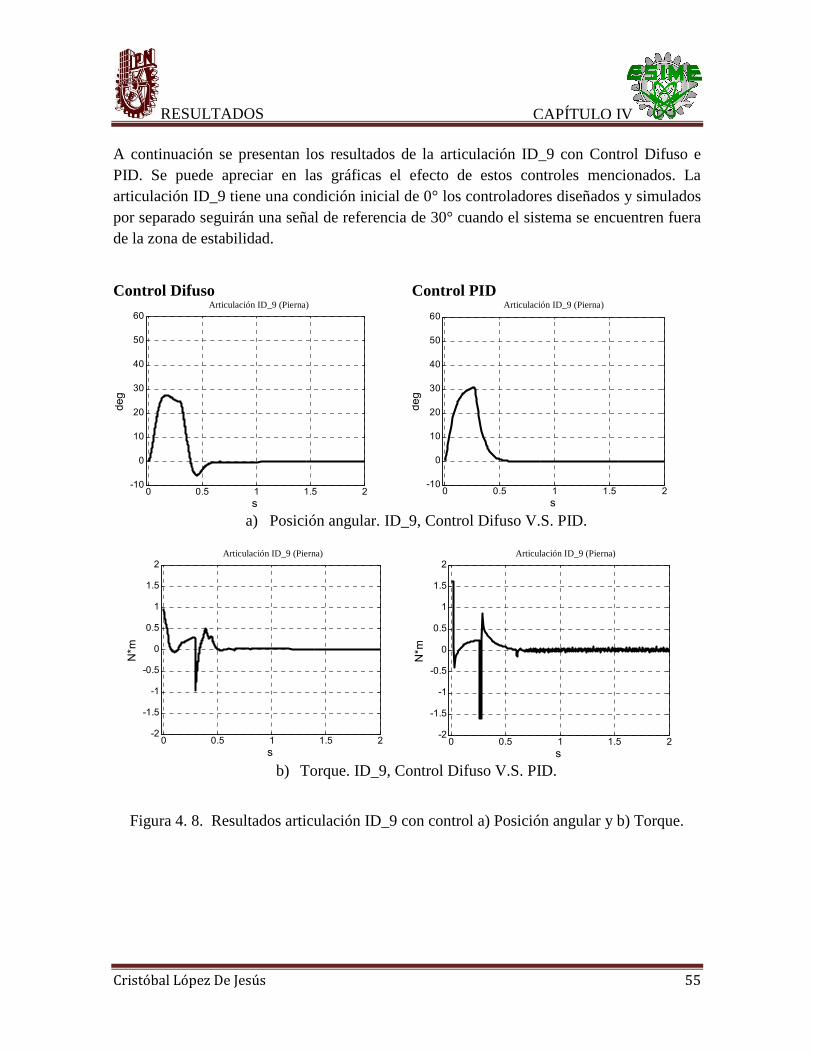
Cristóbal López De Jesús 55
RESULTADOS CAPÍTULO IV
A continuación se presentan los resultados de la articulación ID_9 con Control Difuso ePID. Se puede apreciar en las gráficas el efecto de estos controles mencionados. Laarticulación ID_9 tiene una condición inicial de 0° los controladores diseñados y simuladospor separado seguirán una señal de referencia de 30° cuando el sistema se encuentren fuerade la zona de estabilidad.
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular. ID_9, Control Difuso V.S. PID.
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Torque. ID_9, Control Difuso V.S. PID.
Figura 4. 8. Resultados articulación ID_9 con control a) Posición angular y b) Torque.
0 0.5 1 1.5 2-10
0
10
20
30
40
50
60
deg
s0 0.5 1 1.5 2
-10
0
10
20
30
40
50
60
deg
s
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
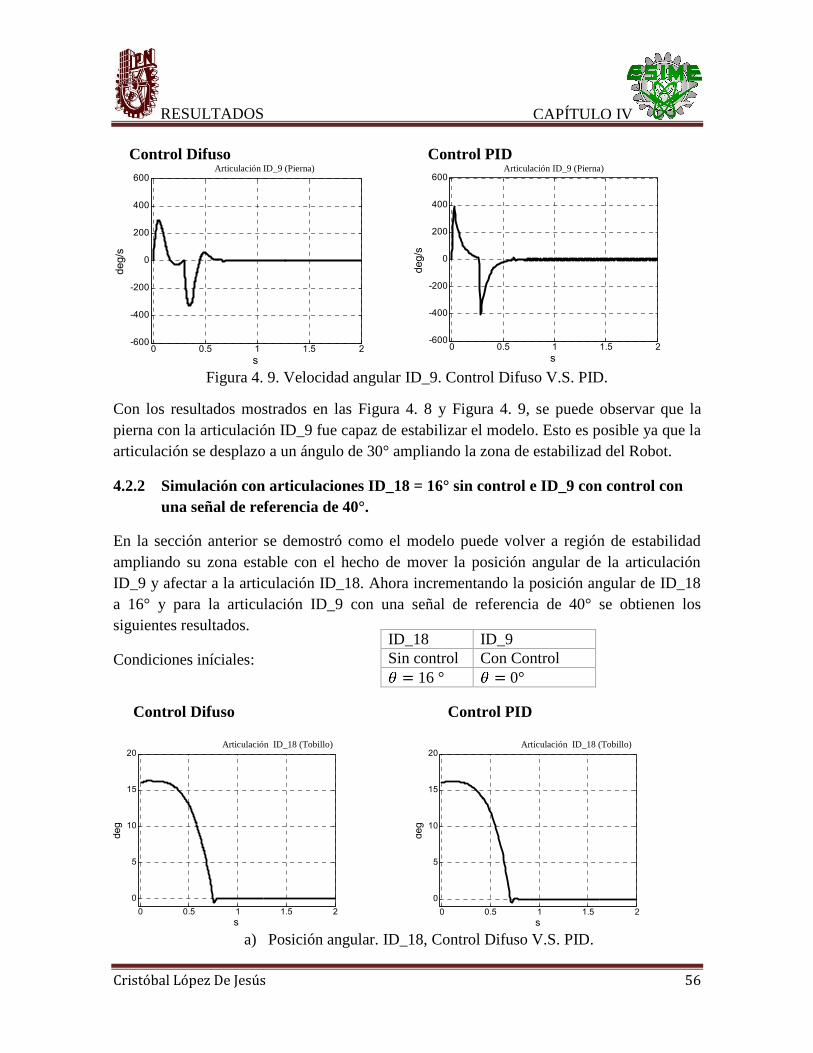
Cristóbal López De Jesús 56
RESULTADOS CAPÍTULO IV
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 9. Velocidad angular ID_9. Control Difuso V.S. PID.
Con los resultados mostrados en las Figura 4. 8 y Figura 4. 9, se puede observar que lapierna con la articulación ID_9 fue capaz de estabilizar el modelo. Esto es posible ya que laarticulación se desplazo a un ángulo de 30° ampliando la zona de estabilizad del Robot.
4.2.2 Simulación con articulaciones ID_18 = 16° sin control e ID_9 con control conuna señal de referencia de 40°.
En la sección anterior se demostró como el modelo puede volver a región de estabilidadampliando su zona estable con el hecho de mover la posición angular de la articulaciónID_9 y afectar a la articulación ID_18. Ahora incrementando la posición angular de ID_18a 16° y para la articulación ID_9 con una señal de referencia de 40° se obtienen lossiguientes resultados.
Condiciones iníciales:
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Posición angular. ID_18, Control Difuso V.S. PID.
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
0 0.5 1 1.5 20
5
10
15
20
deg
s0 0.5 1 1.5 2
0
5
10
15
20
deg
s
ID_18 ID_9Sin control Con Control= 16 ° = 0°
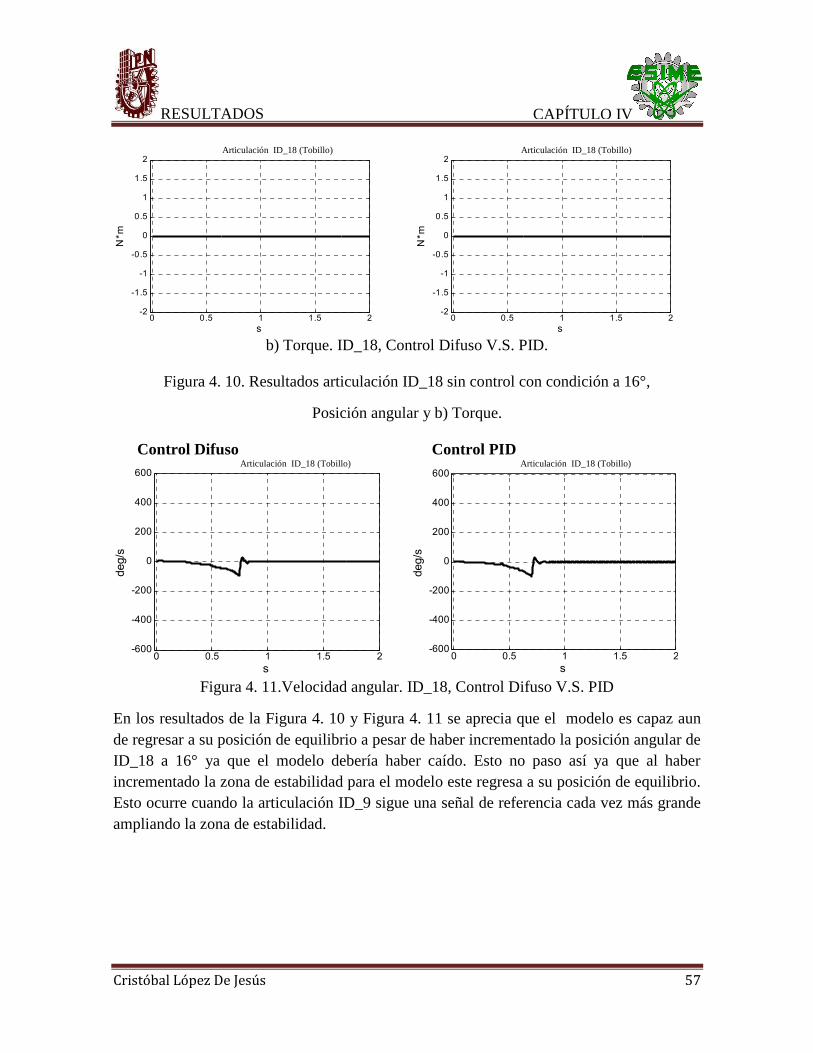
Cristóbal López De Jesús 57
RESULTADOS CAPÍTULO IV
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Torque. ID_18, Control Difuso V.S. PID.
Figura 4. 10. Resultados articulación ID_18 sin control con condición a 16°,
Posición angular y b) Torque.
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 11.Velocidad angular. ID_18, Control Difuso V.S. PID
En los resultados de la Figura 4. 10 y Figura 4. 11 se aprecia que el modelo es capaz aunde regresar a su posición de equilibrio a pesar de haber incrementado la posición angular deID_18 a 16° ya que el modelo debería haber caído. Esto no paso así ya que al haberincrementado la zona de estabilidad para el modelo este regresa a su posición de equilibrio.Esto ocurre cuando la articulación ID_9 sigue una señal de referencia cada vez más grandeampliando la zona de estabilidad.
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
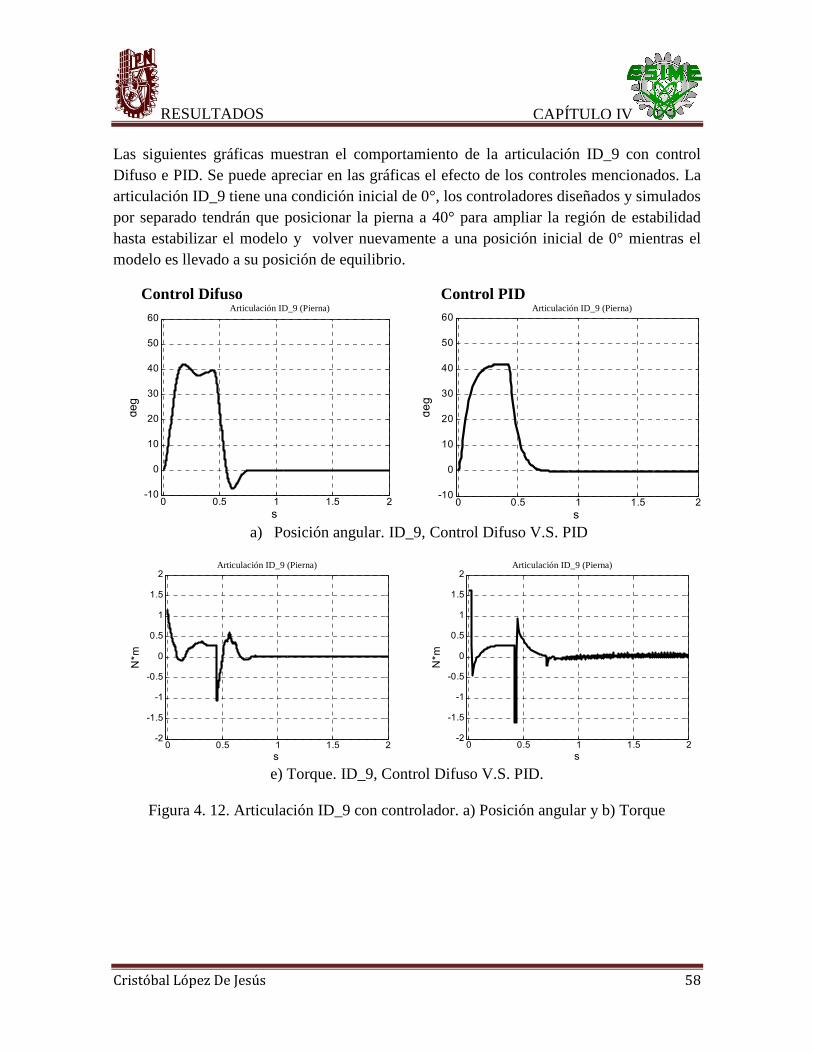
Cristóbal López De Jesús 58
RESULTADOS CAPÍTULO IV
Las siguientes gráficas muestran el comportamiento de la articulación ID_9 con controlDifuso e PID. Se puede apreciar en las gráficas el efecto de los controles mencionados. Laarticulación ID_9 tiene una condición inicial de 0°, los controladores diseñados y simuladospor separado tendrán que posicionar la pierna a 40° para ampliar la región de estabilidadhasta estabilizar el modelo y volver nuevamente a una posición inicial de 0° mientras elmodelo es llevado a su posición de equilibrio.
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular. ID_9, Control Difuso V.S. PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
e) Torque. ID_9, Control Difuso V.S. PID.
Figura 4. 12. Articulación ID_9 con controlador. a) Posición angular y b) Torque
0 0.5 1 1.5 2-10
0
10
20
30
40
50
60
deg
s0 0.5 1 1.5 2
-10
0
10
20
30
40
50
60
deg
s
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
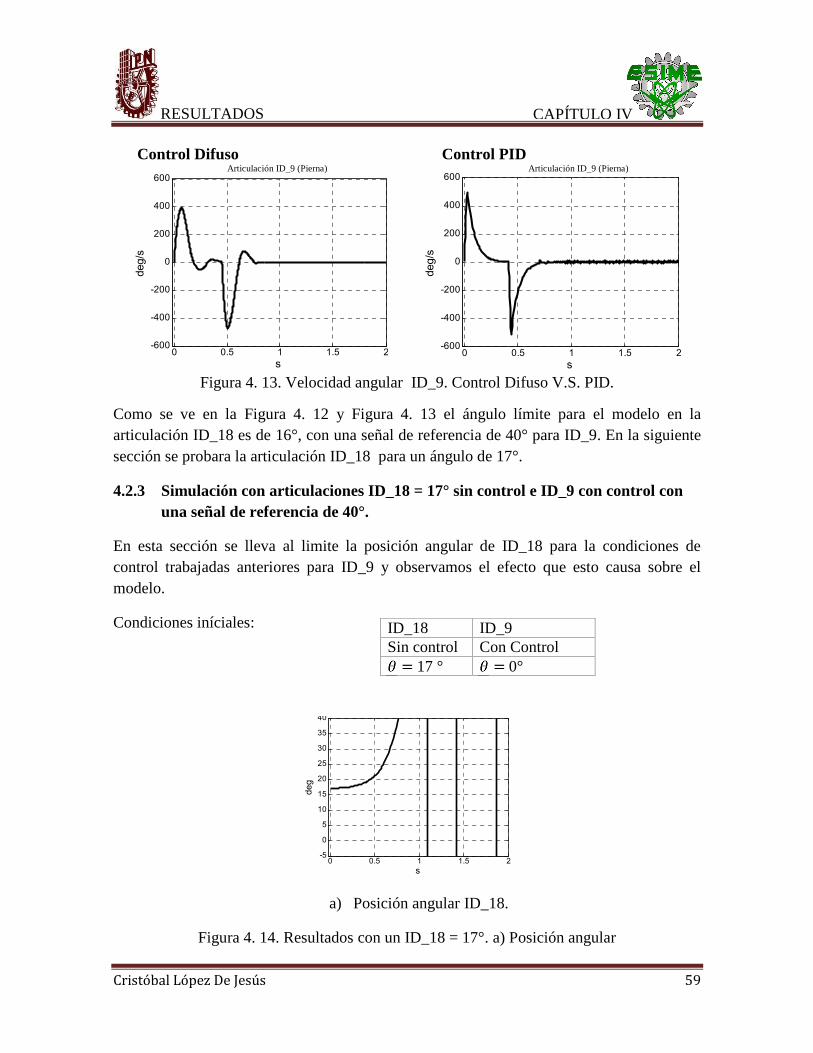
Cristóbal López De Jesús 59
RESULTADOS CAPÍTULO IV
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 13. Velocidad angular ID_9. Control Difuso V.S. PID.
Como se ve en la Figura 4. 12 y Figura 4. 13 el ángulo límite para el modelo en laarticulación ID_18 es de 16°, con una señal de referencia de 40° para ID_9. En la siguientesección se probara la articulación ID_18 para un ángulo de 17°.
4.2.3 Simulación con articulaciones ID_18 = 17° sin control e ID_9 con control conuna señal de referencia de 40°.
En esta sección se lleva al limite la posición angular de ID_18 para la condiciones decontrol trabajadas anteriores para ID_9 y observamos el efecto que esto causa sobre elmodelo.
Condiciones iníciales:
a) Posición angular ID_18.
Figura 4. 14. Resultados con un ID_18 = 17°. a) Posición angular
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
0 0.5 1 1.5 2-5
0
5
10
15
20
25
30
35
40
deg
s
Articulacion ID 18 (Tobillo)
ID_18 ID_9Sin control Con Control= 17 ° = 0°

Cristóbal López De Jesús 60
RESULTADOS CAPÍTULO IV
En la Figura 4. 14 se observa como para la articulación ID_18 en una posición angular de17°, la pierna con la articulación ID_9 ya no es capaz de estabilizar el modelo cuando seutiliza una señal de referencia de 40°. Recordando que en todas las secciones anteriores nose ha utilizado algún tipo de control en la articulación ID_18.
4.2.4 Simulación con articulaciones ID_18 = 17° sin control e ID_9 con control conuna señal de referencia 50°.
En la sección anterior se observo que con una señal de referencia de 40° para la articulaciónID_9 solo permitió estabilizar al modelo cuando la articulación ID_18 se encontraba en laposición angular menor a 17°, por esa razón a continuación se propone un señal dereferencia de 50° con esto incrementar la región de estabilidad para el modelo.
Condiciones iníciales:
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Posición angular ID_18. Control Difuso V.S. PID.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Torque ID_18. Control Difuso V.S. PID.Figura 4. 15. Articulación ID_18 sin control. a) Posición angular y b) Torque.
0 0.5 1 1.5 20
5
10
15
20
deg
s0 0.5 1 1.5 2
0
5
10
15
20
deg
s
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
ID_18 ID_9Sin control Con Control= 17 ° = 0°
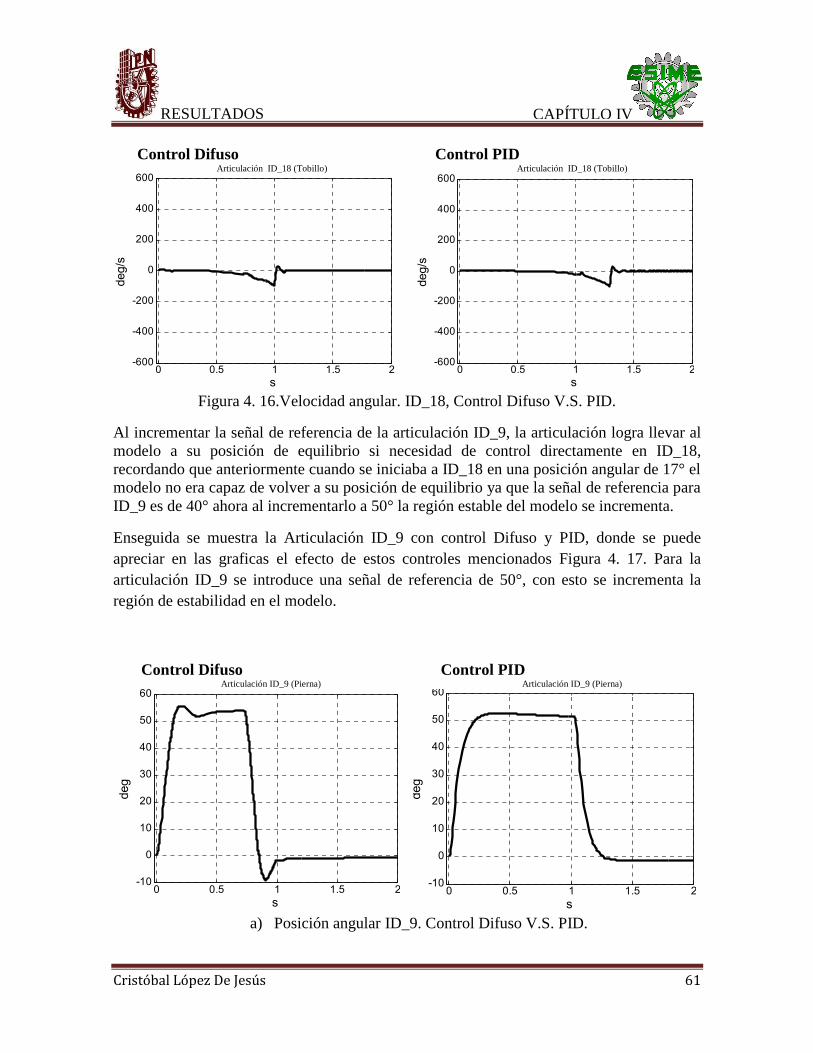
Cristóbal López De Jesús 61
RESULTADOS CAPÍTULO IV
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 16.Velocidad angular. ID_18, Control Difuso V.S. PID.
Al incrementar la señal de referencia de la articulación ID_9, la articulación logra llevar almodelo a su posición de equilibrio si necesidad de control directamente en ID_18,recordando que anteriormente cuando se iniciaba a ID_18 en una posición angular de 17° elmodelo no era capaz de volver a su posición de equilibrio ya que la señal de referencia paraID_9 es de 40° ahora al incrementarlo a 50° la región estable del modelo se incrementa.
Enseguida se muestra la Articulación ID_9 con control Difuso y PID, donde se puedeapreciar en las graficas el efecto de estos controles mencionados Figura 4. 17. Para laarticulación ID_9 se introduce una señal de referencia de 50°, con esto se incrementa laregión de estabilidad en el modelo.
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular ID_9. Control Difuso V.S. PID.
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
0 0.5 1 1.5 2-10
0
10
20
30
40
50
60
deg
s0 0.5 1 1.5 2
-10
0
10
20
30
40
50
60
deg
s
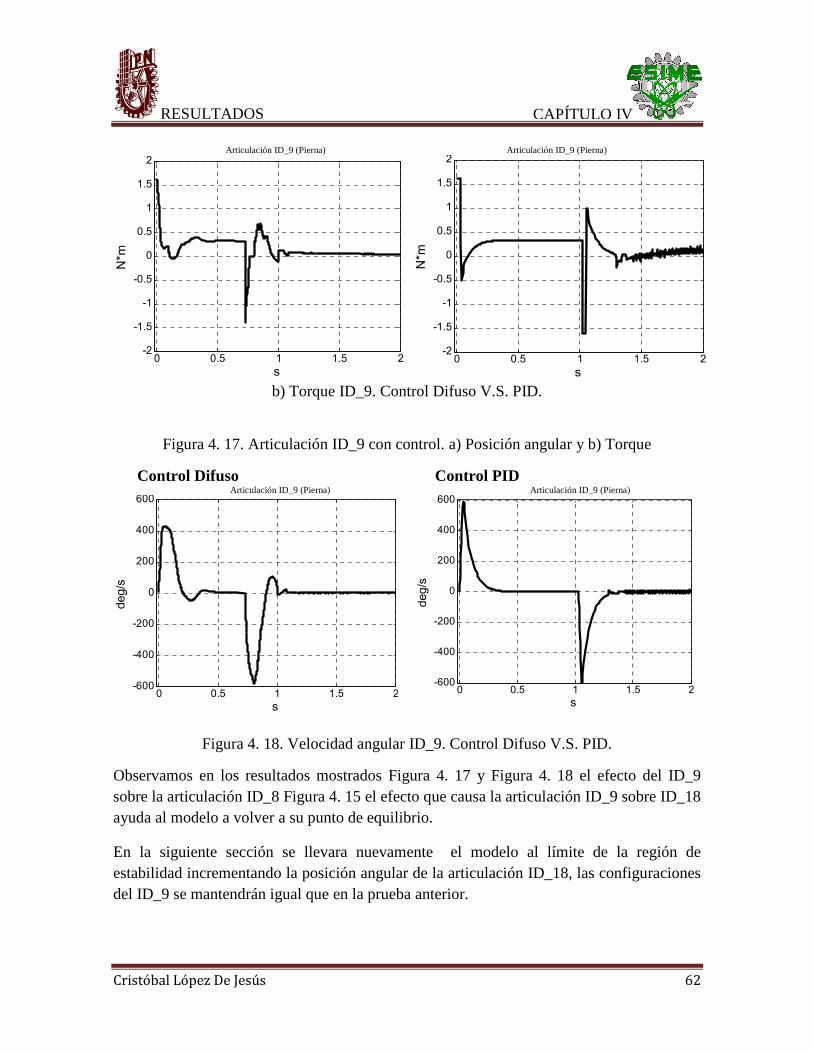
Cristóbal López De Jesús 62
RESULTADOS CAPÍTULO IV
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Torque ID_9. Control Difuso V.S. PID.
Figura 4. 17. Articulación ID_9 con control. a) Posición angular y b) Torque
Control Difuso Control PIDArticulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 18. Velocidad angular ID_9. Control Difuso V.S. PID.
Observamos en los resultados mostrados Figura 4. 17 y Figura 4. 18 el efecto del ID_9sobre la articulación ID_8 Figura 4. 15 el efecto que causa la articulación ID_9 sobre ID_18ayuda al modelo a volver a su punto de equilibrio.
En la siguiente sección se llevara nuevamente el modelo al límite de la región deestabilidad incrementando la posición angular de la articulación ID_18, las configuracionesdel ID_9 se mantendrán igual que en la prueba anterior.
0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 0.5 1 1.5 2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 0.5 1 1.5 2-600
-400
-200
0
200
400
600
deg/
s
s0 0.5 1 1.5 2
-600
-400
-200
0
200
400
600
deg/
s
s
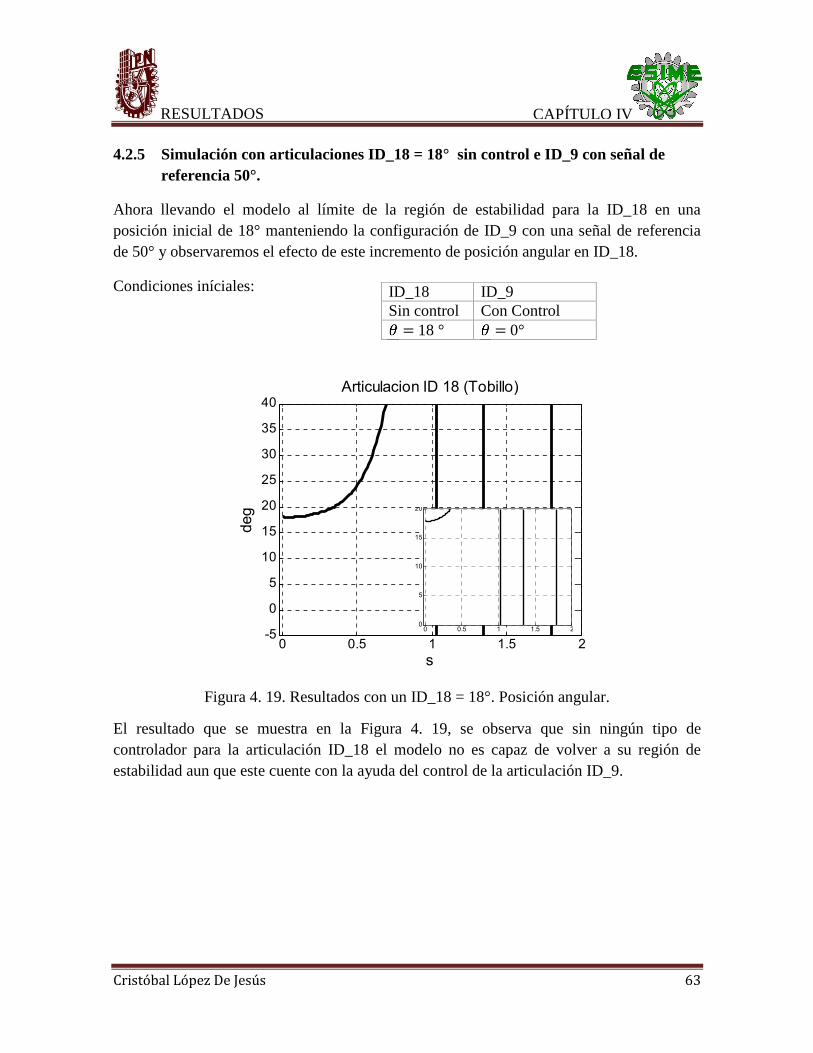
Cristóbal López De Jesús 63
RESULTADOS CAPÍTULO IV
4.2.5 Simulación con articulaciones ID_18 = 18° sin control e ID_9 con señal dereferencia 50°.
Ahora llevando el modelo al límite de la región de estabilidad para la ID_18 en unaposición inicial de 18° manteniendo la configuración de ID_9 con una señal de referenciade 50° y observaremos el efecto de este incremento de posición angular en ID_18.
Condiciones iníciales:
Figura 4. 19. Resultados con un ID_18 = 18°. Posición angular.
El resultado que se muestra en la Figura 4. 19, se observa que sin ningún tipo decontrolador para la articulación ID_18 el modelo no es capaz de volver a su región deestabilidad aun que este cuente con la ayuda del control de la articulación ID_9.
0 0.5 1 1.5 2-5
0
5
10
15
20
25
30
35
40
deg
s
Articulacion ID 18 (Tobillo)
ID_18 ID_9Sin control Con Control= 18 ° = 0°
0 0.5 1 1.5 20
5
10
15
20
deg
s
Articulacion ID 18 (Tobillo)
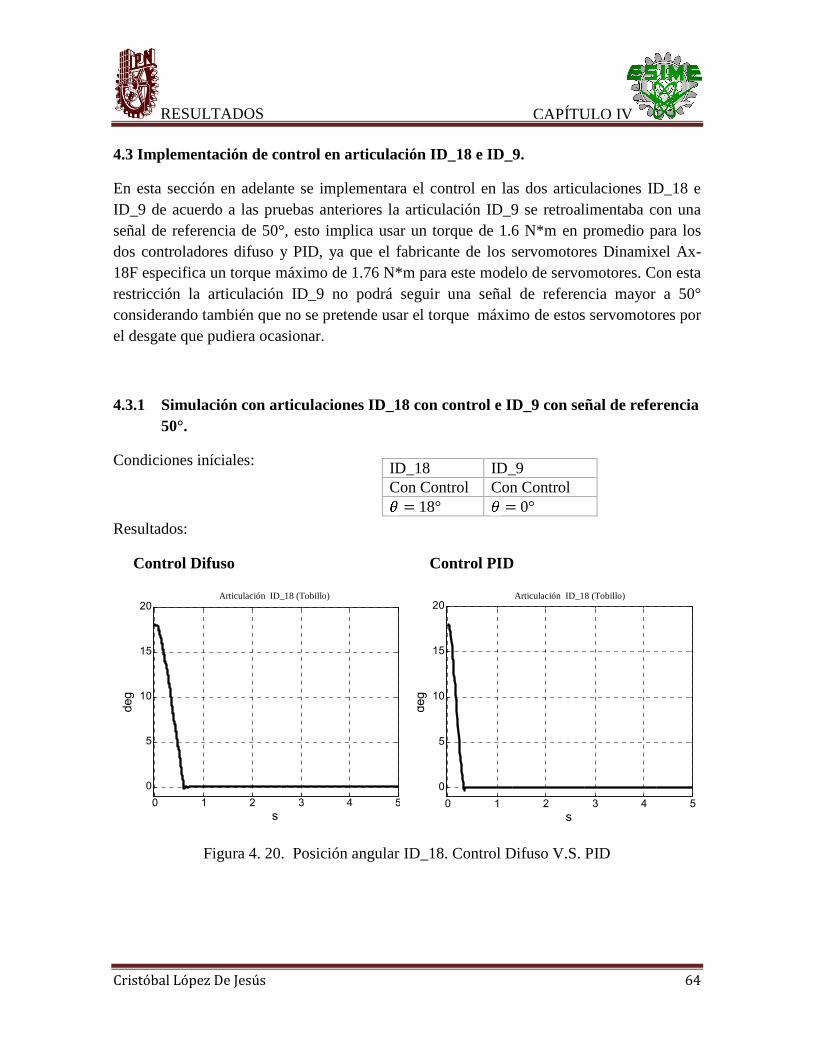
Cristóbal López De Jesús 64
RESULTADOS CAPÍTULO IV
4.3 Implementación de control en articulación ID_18 e ID_9.
En esta sección en adelante se implementara el control en las dos articulaciones ID_18 eID_9 de acuerdo a las pruebas anteriores la articulación ID_9 se retroalimentaba con unaseñal de referencia de 50°, esto implica usar un torque de 1.6 N*m en promedio para losdos controladores difuso y PID, ya que el fabricante de los servomotores Dinamixel Ax-18F especifica un torque máximo de 1.76 N*m para este modelo de servomotores. Con estarestricción la articulación ID_9 no podrá seguir una señal de referencia mayor a 50°considerando también que no se pretende usar el torque máximo de estos servomotores porel desgate que pudiera ocasionar.
4.3.1 Simulación con articulaciones ID_18 con control e ID_9 con señal de referencia50°.
Condiciones iníciales:
Resultados:
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 20. Posición angular ID_18. Control Difuso V.S. PID
0 1 2 3 4 50
5
10
15
20
deg
s0 1 2 3 4 5
0
5
10
15
20
deg
s
ID_18 ID_9Con Control Con Control= 18° = 0°

Cristóbal López De Jesús 65
RESULTADOS CAPÍTULO IV
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Torque. ID_18, Control Difuso V.S. PID.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Velocidad angular. ID_18, Control Difuso V.S. PID.
Figura 4. 21. Articulación ID_18 con control. a) Torque y b) Velocidad angular.
En las Figura 4. 20 y Figura 4. 21 Se observan los resultados de los controladores Difuso yPID instalados en la articulación ID_18, debido a la restricción comentada anteriormenteahora se puede observar los resultados de una señal de control (Figura 4. 21) en laarticulación ID_18 con la que el modelo puede volver a su punto de equilibrio,anteriormente esto no era posible debió que el modelo dependía de la articulación ID_9para su estabilidad.
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s

Cristóbal López De Jesús 66
RESULTADOS CAPÍTULO IV
Con la restricciones planteadas anteriormente para la articulación ID_18 en la articulaciónID_9 se mantienen las mismas condiciones iníciales para verificar el efecto de laarticulación ID_18 sobre el modelo.
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular. ID_9, Control Difuso V.S. PID.
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Torque. ID_9, Control Difuso V.S. PID.
Figura 4. 22. Articulación ID_9 con control. a) Posición angular y b) Torque.
0 1 2 3 4 5-10
0
10
20
30
40
50
60
deg
s0 1 2 3 4 5
-10
0
10
20
30
40
50
60
deg
s
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
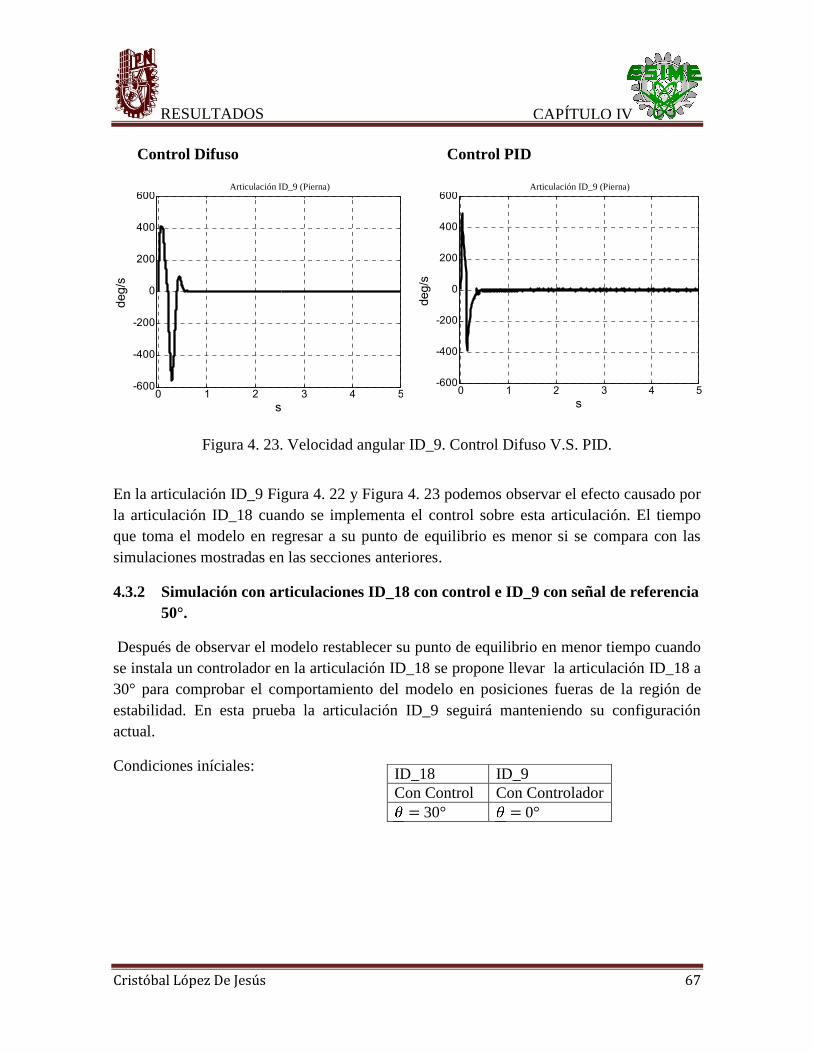
Cristóbal López De Jesús 67
RESULTADOS CAPÍTULO IV
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 23. Velocidad angular ID_9. Control Difuso V.S. PID.
En la articulación ID_9 Figura 4. 22 y Figura 4. 23 podemos observar el efecto causado porla articulación ID_18 cuando se implementa el control sobre esta articulación. El tiempoque toma el modelo en regresar a su punto de equilibrio es menor si se compara con lassimulaciones mostradas en las secciones anteriores.
4.3.2 Simulación con articulaciones ID_18 con control e ID_9 con señal de referencia50°.
Después de observar el modelo restablecer su punto de equilibrio en menor tiempo cuandose instala un controlador en la articulación ID_18 se propone llevar la articulación ID_18 a30° para comprobar el comportamiento del modelo en posiciones fueras de la región deestabilidad. En esta prueba la articulación ID_9 seguirá manteniendo su configuraciónactual.
Condiciones iníciales:
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
ss
ID_18 ID_9Con Control Con Controlador= 30° = 0°
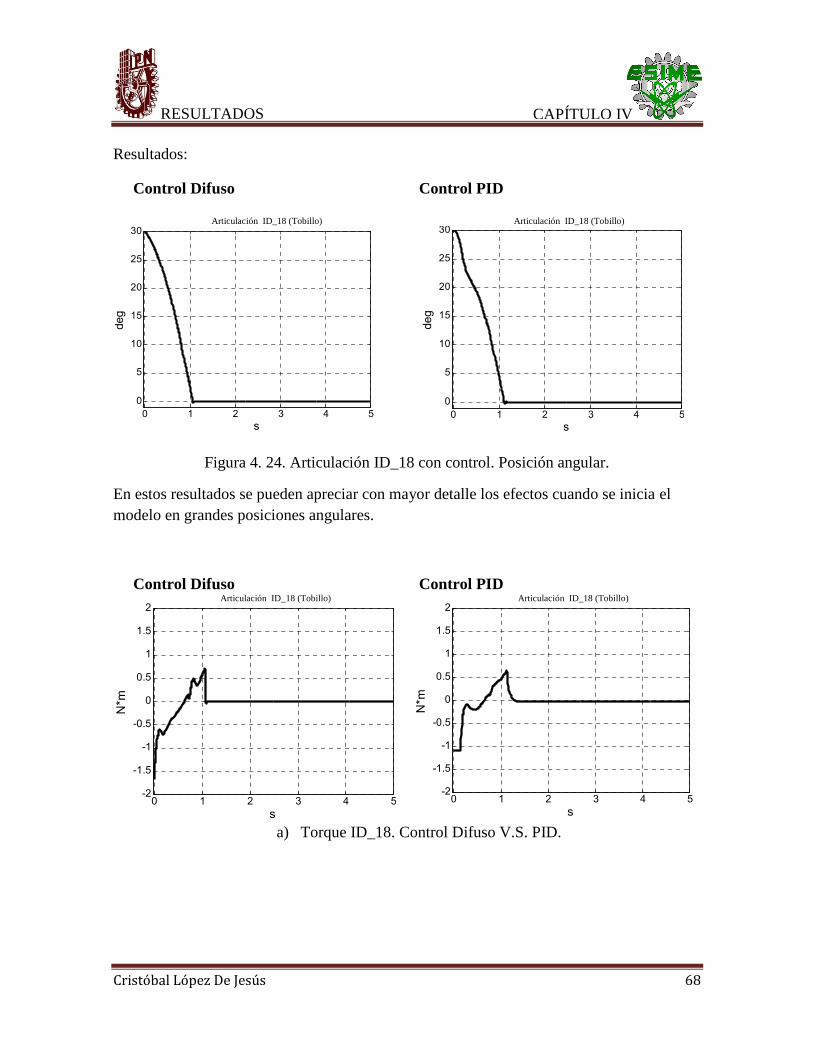
Cristóbal López De Jesús 68
RESULTADOS CAPÍTULO IV
Resultados:
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 24. Articulación ID_18 con control. Posición angular.
En estos resultados se pueden apreciar con mayor detalle los efectos cuando se inicia elmodelo en grandes posiciones angulares.
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Torque ID_18. Control Difuso V.S. PID.
0 1 2 3 4 50
5
10
15
20
25
30
deg
s0 1 2 3 4 5
0
5
10
15
20
25
30
deg
s
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
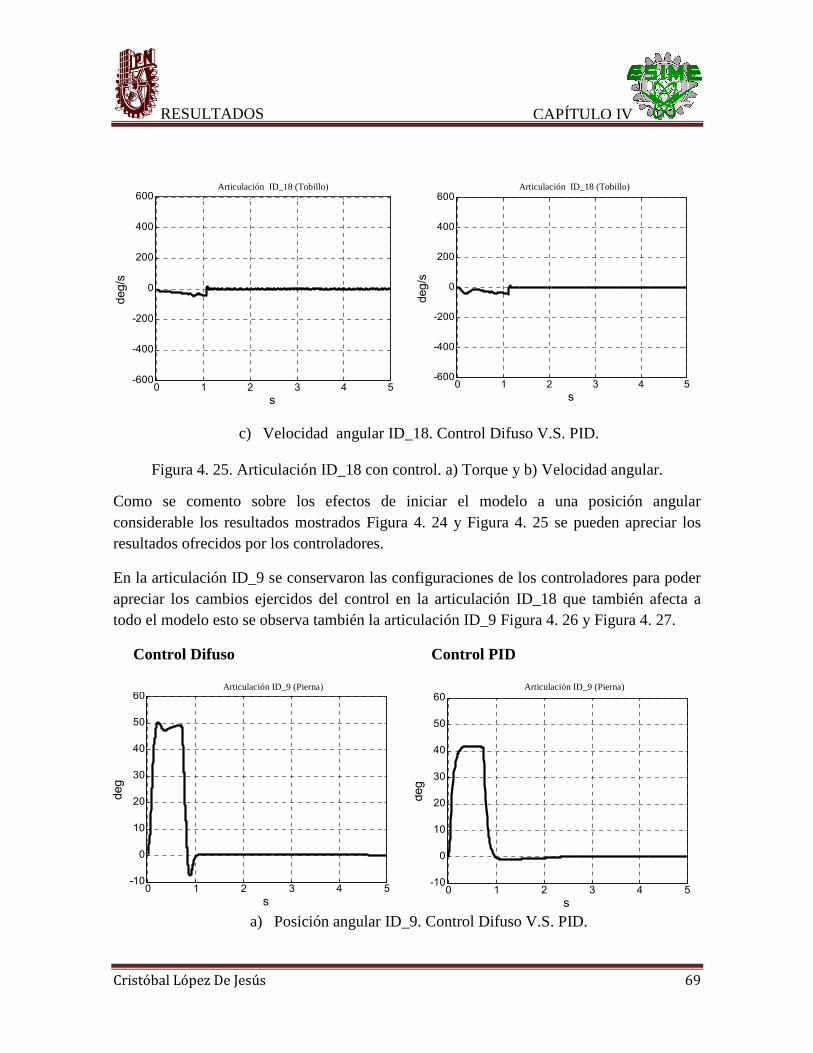
Cristóbal López De Jesús 69
RESULTADOS CAPÍTULO IV
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
c) Velocidad angular ID_18. Control Difuso V.S. PID.
Figura 4. 25. Articulación ID_18 con control. a) Torque y b) Velocidad angular.
Como se comento sobre los efectos de iniciar el modelo a una posición angularconsiderable los resultados mostrados Figura 4. 24 y Figura 4. 25 se pueden apreciar losresultados ofrecidos por los controladores.
En la articulación ID_9 se conservaron las configuraciones de los controladores para poderapreciar los cambios ejercidos del control en la articulación ID_18 que también afecta atodo el modelo esto se observa también la articulación ID_9 Figura 4. 26 y Figura 4. 27.
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular ID_9. Control Difuso V.S. PID.
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s
0 1 2 3 4 5-10
0
10
20
30
40
50
60
deg
s0 1 2 3 4 5
-10
0
10
20
30
40
50
60
deg
s
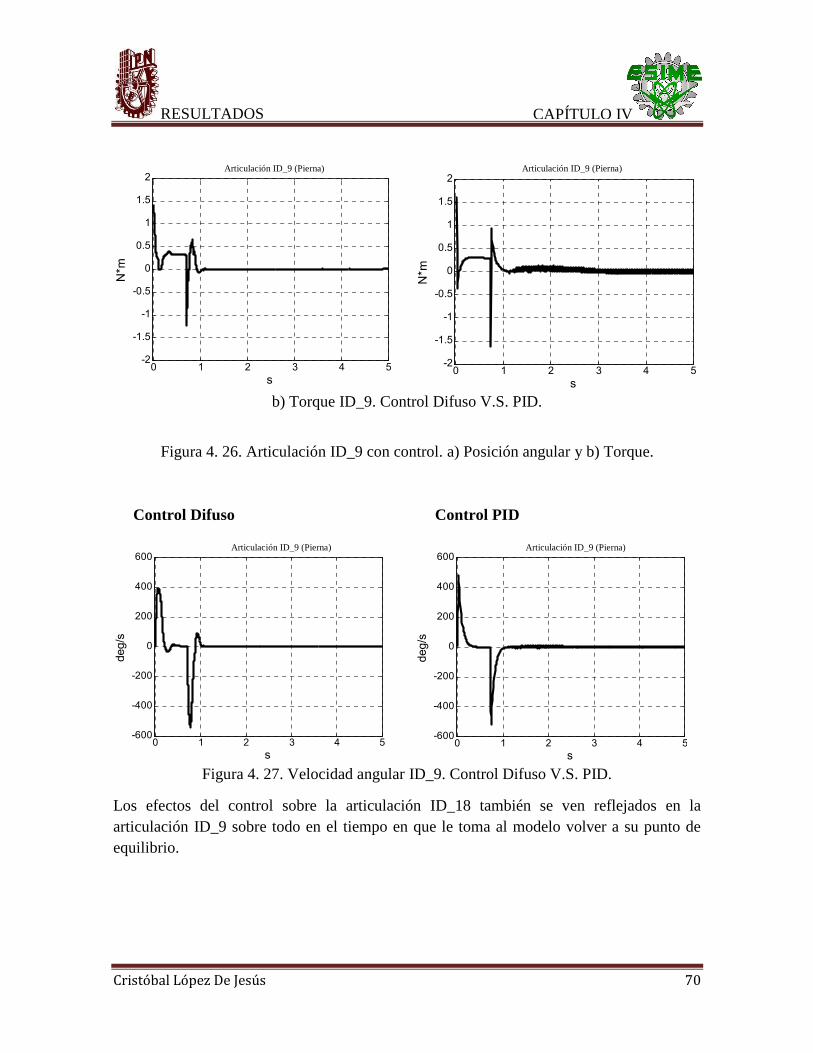
Cristóbal López De Jesús 70
RESULTADOS CAPÍTULO IV
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Torque ID_9. Control Difuso V.S. PID.
Figura 4. 26. Articulación ID_9 con control. a) Posición angular y b) Torque.
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 27. Velocidad angular ID_9. Control Difuso V.S. PID.
Los efectos del control sobre la articulación ID_18 también se ven reflejados en laarticulación ID_9 sobre todo en el tiempo en que le toma al modelo volver a su punto deequilibrio.
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s
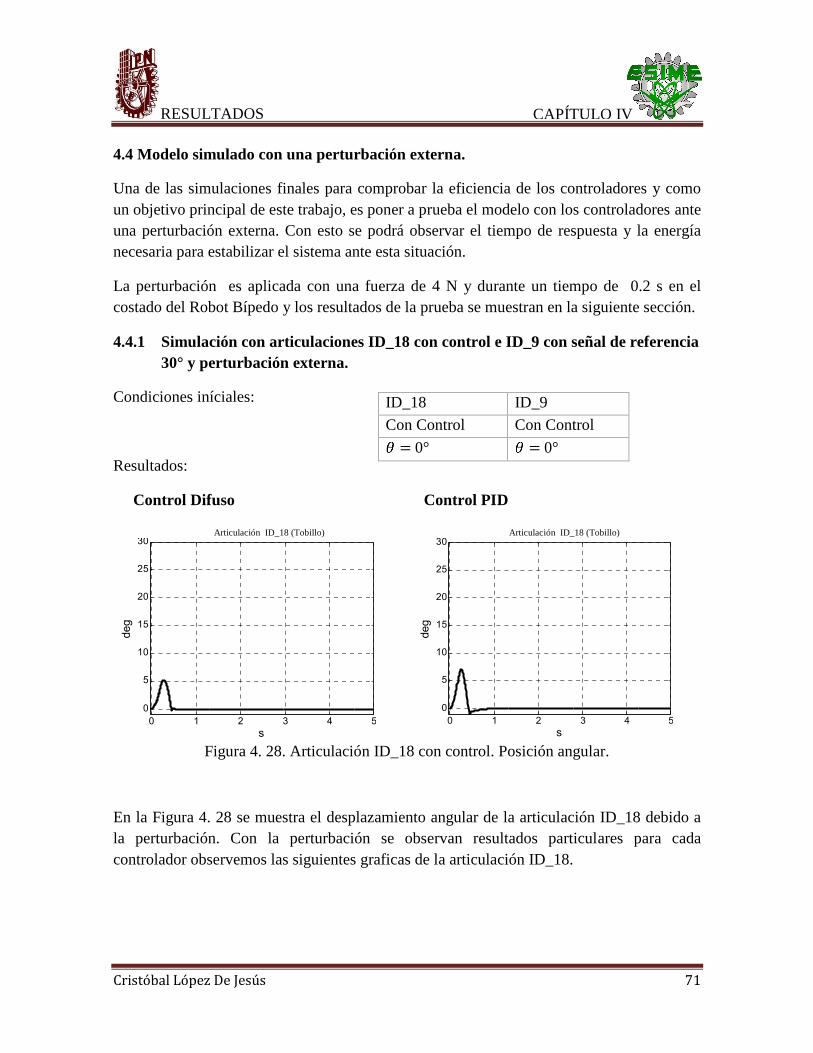
Cristóbal López De Jesús 71
RESULTADOS CAPÍTULO IV
4.4 Modelo simulado con una perturbación externa.
Una de las simulaciones finales para comprobar la eficiencia de los controladores y comoun objetivo principal de este trabajo, es poner a prueba el modelo con los controladores anteuna perturbación externa. Con esto se podrá observar el tiempo de respuesta y la energíanecesaria para estabilizar el sistema ante esta situación.
La perturbación es aplicada con una fuerza de 4 N y durante un tiempo de 0.2 s en elcostado del Robot Bípedo y los resultados de la prueba se muestran en la siguiente sección.
4.4.1 Simulación con articulaciones ID_18 con control e ID_9 con señal de referencia30° y perturbación externa.
Condiciones iníciales:
Resultados:
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 4. 28. Articulación ID_18 con control. Posición angular.
En la Figura 4. 28 se muestra el desplazamiento angular de la articulación ID_18 debido ala perturbación. Con la perturbación se observan resultados particulares para cadacontrolador observemos las siguientes graficas de la articulación ID_18.
0 1 2 3 4 50
5
10
15
20
25
30
deg
s0 1 2 3 4 5
0
5
10
15
20
25
30
deg
s
ID_18 ID_9
Con Control Con Control= 0° = 0°

Cristóbal López De Jesús 72
RESULTADOS CAPÍTULO IV
Las siguientes figuras muestran la energía requerida y velocidad para estabilizar el modeloante la perturbación a la que fue sometido el modelo durante 0.2 s
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Torque ID_18. Control Difuso V.S. PID.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Velocidad angular ID_18. Control Difuso V.S. PID.
Figura 4. 29. Articulación ID_18 con control. a) Torque y b) Velocidad angular.
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s
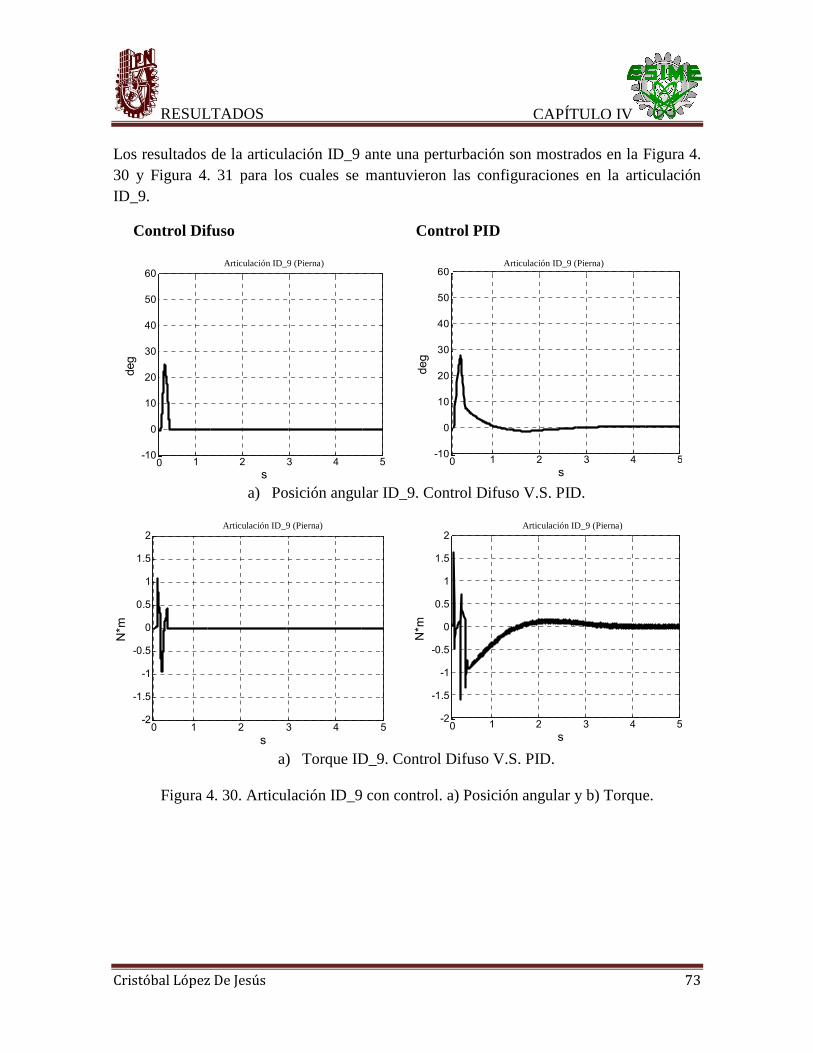
Cristóbal López De Jesús 73
RESULTADOS CAPÍTULO IV
Los resultados de la articulación ID_9 ante una perturbación son mostrados en la Figura 4.30 y Figura 4. 31 para los cuales se mantuvieron las configuraciones en la articulaciónID_9.
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Posición angular ID_9. Control Difuso V.S. PID.
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
a) Torque ID_9. Control Difuso V.S. PID.
Figura 4. 30. Articulación ID_9 con control. a) Posición angular y b) Torque.
0 1 2 3 4 5-10
0
10
20
30
40
50
60
deg
s
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-10
0
10
20
30
40
50
60
deg
s0 1 2 3 4 5
-10
0
10
20
30
40
50
60
deg
s0 1 2 3 4 5
-10
0
10
20
30
40
50
60
deg
s
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
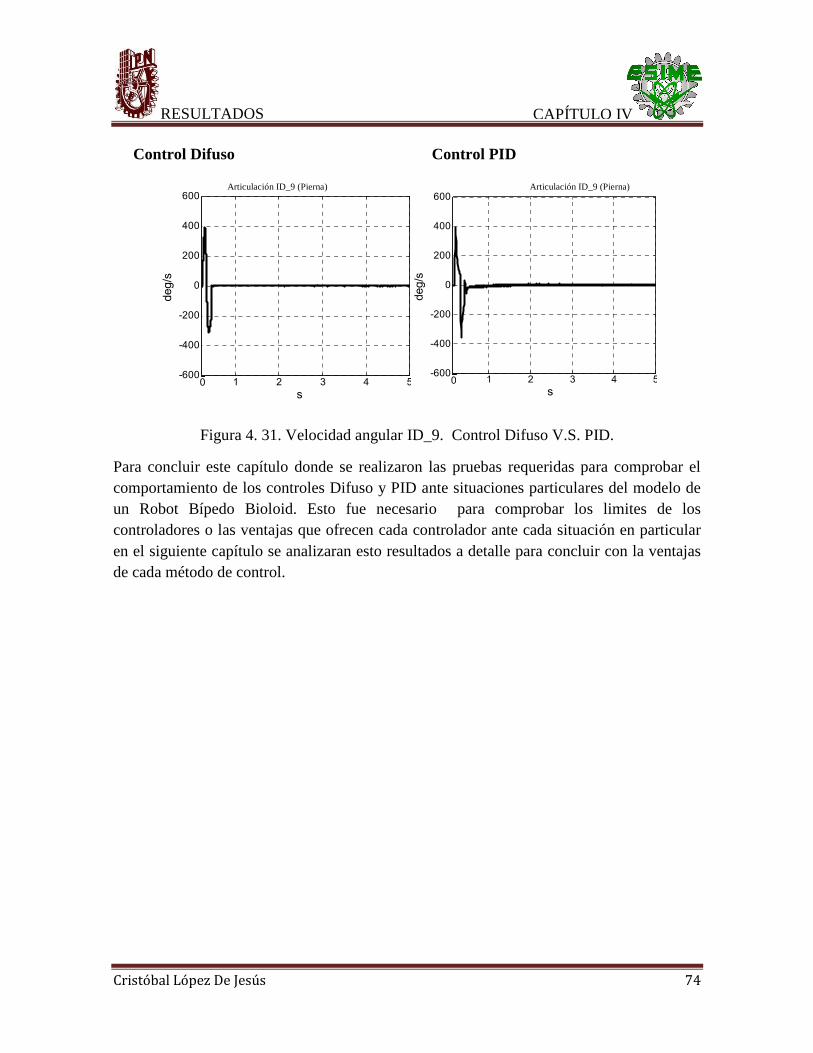
Cristóbal López De Jesús 74
RESULTADOS CAPÍTULO IV
Control Difuso Control PID
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
Figura 4. 31. Velocidad angular ID_9. Control Difuso V.S. PID.
Para concluir este capítulo donde se realizaron las pruebas requeridas para comprobar elcomportamiento de los controles Difuso y PID ante situaciones particulares del modelo deun Robot Bípedo Bioloid. Esto fue necesario para comprobar los limites de loscontroladores o las ventajas que ofrecen cada controlador ante cada situación en particularen el siguiente capítulo se analizaran esto resultados a detalle para concluir con la ventajasde cada método de control.
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s
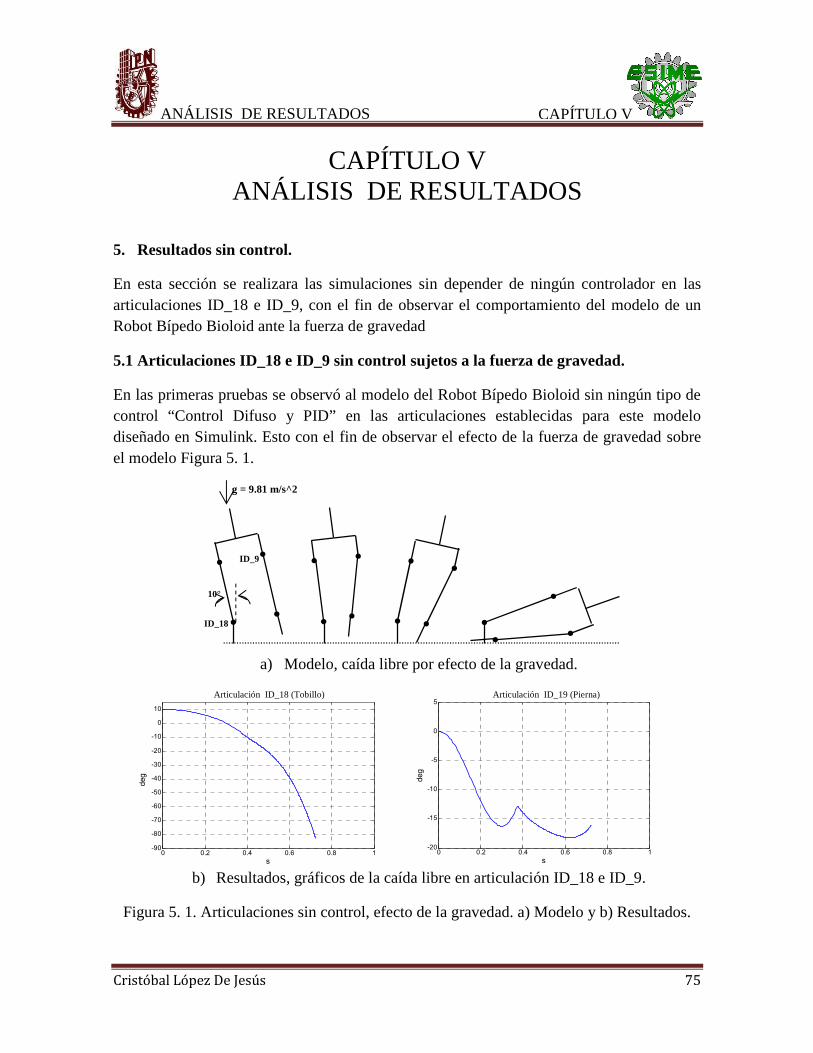
Cristóbal López De Jesús 75
ANÁLISIS DE RESULTADOS CAPÍTULO V
CAPÍTULO VANÁLISIS DE RESULTADOS
5. Resultados sin control.
En esta sección se realizara las simulaciones sin depender de ningún controlador en lasarticulaciones ID_18 e ID_9, con el fin de observar el comportamiento del modelo de unRobot Bípedo Bioloid ante la fuerza de gravedad
5.1 Articulaciones ID_18 e ID_9 sin control sujetos a la fuerza de gravedad.
En las primeras pruebas se observó al modelo del Robot Bípedo Bioloid sin ningún tipo decontrol “Control Difuso y PID” en las articulaciones establecidas para este modelodiseñado en Simulink. Esto con el fin de observar el efecto de la fuerza de gravedad sobreel modelo Figura 5. 1.
a) Modelo, caída libre por efecto de la gravedad.
Articulación ID_18 (Tobillo) Articulación ID_19 (Pierna)
b) Resultados, gráficos de la caída libre en articulación ID_18 e ID_9.
Figura 5. 1. Articulaciones sin control, efecto de la gravedad. a) Modelo y b) Resultados.
0 0.2 0.4 0.6 0.8 1-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10
deg
s
Articulacion ID 18 (Tobillo)
0 0.2 0.4 0.6 0.8 1-20
-15
-10
-5
0
5
deg
s
Articulacion ID 9 (Pierna)
ID_18
ID_9
g = 9.81 m/s^2
10°
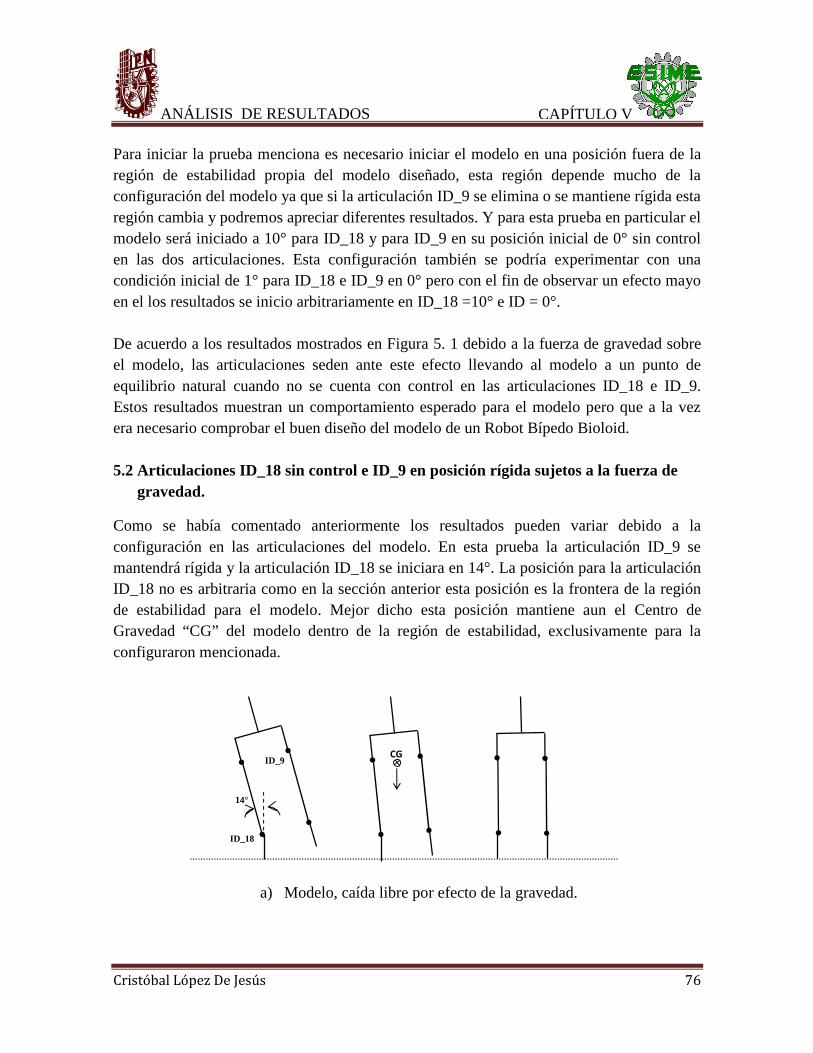
Cristóbal López De Jesús 76
ANÁLISIS DE RESULTADOS CAPÍTULO V
Para iniciar la prueba menciona es necesario iniciar el modelo en una posición fuera de laregión de estabilidad propia del modelo diseñado, esta región depende mucho de laconfiguración del modelo ya que si la articulación ID_9 se elimina o se mantiene rígida estaregión cambia y podremos apreciar diferentes resultados. Y para esta prueba en particular elmodelo será iniciado a 10° para ID_18 y para ID_9 en su posición inicial de 0° sin controlen las dos articulaciones. Esta configuración también se podría experimentar con unacondición inicial de 1° para ID_18 e ID_9 en 0° pero con el fin de observar un efecto mayoen el los resultados se inicio arbitrariamente en ID_18 =10° e ID = 0°.
De acuerdo a los resultados mostrados en Figura 5. 1 debido a la fuerza de gravedad sobreel modelo, las articulaciones seden ante este efecto llevando al modelo a un punto deequilibrio natural cuando no se cuenta con control en las articulaciones ID_18 e ID_9.Estos resultados muestran un comportamiento esperado para el modelo pero que a la vezera necesario comprobar el buen diseño del modelo de un Robot Bípedo Bioloid.
5.2 Articulaciones ID_18 sin control e ID_9 en posición rígida sujetos a la fuerza degravedad.
Como se había comentado anteriormente los resultados pueden variar debido a laconfiguración en las articulaciones del modelo. En esta prueba la articulación ID_9 semantendrá rígida y la articulación ID_18 se iniciara en 14°. La posición para la articulaciónID_18 no es arbitraria como en la sección anterior esta posición es la frontera de la regiónde estabilidad para el modelo. Mejor dicho esta posición mantiene aun el Centro deGravedad “CG” del modelo dentro de la región de estabilidad, exclusivamente para laconfiguraron mencionada.
a) Modelo, caída libre por efecto de la gravedad.
CG
ID_18
ID_9
14°
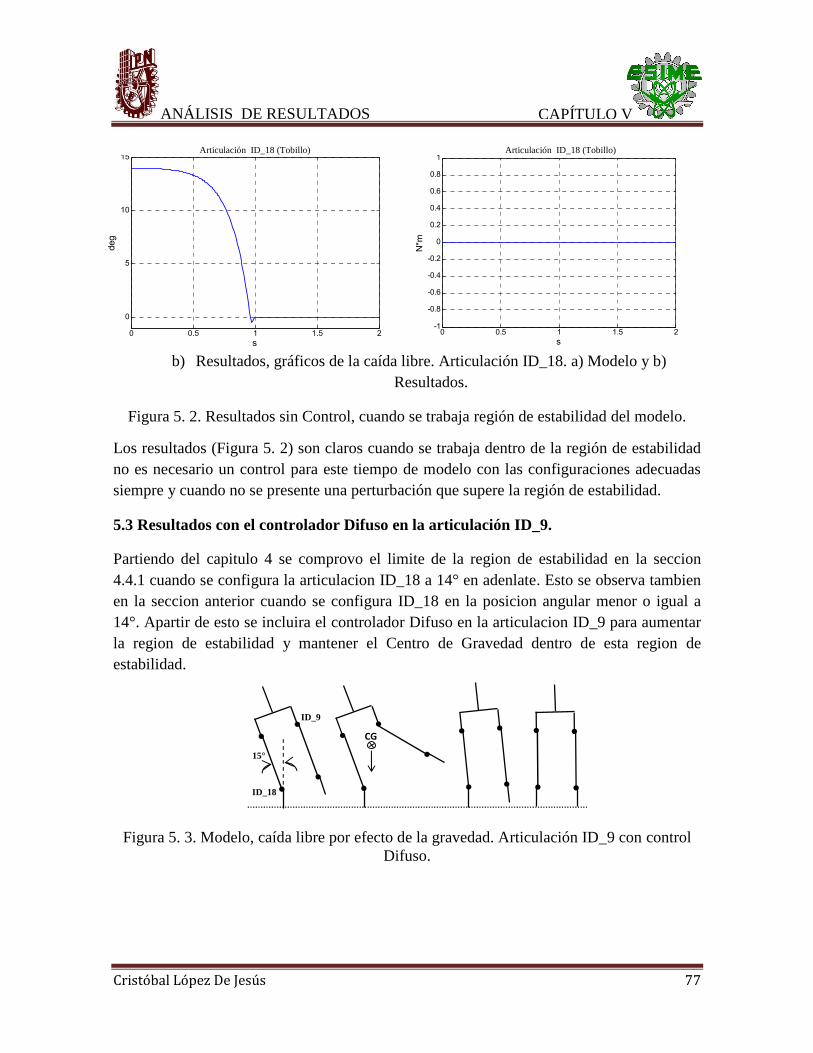
Cristóbal López De Jesús 77
ANÁLISIS DE RESULTADOS CAPÍTULO V
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Resultados, gráficos de la caída libre. Articulación ID_18. a) Modelo y b)Resultados.
Figura 5. 2. Resultados sin Control, cuando se trabaja región de estabilidad del modelo.
Los resultados (Figura 5. 2) son claros cuando se trabaja dentro de la región de estabilidadno es necesario un control para este tiempo de modelo con las configuraciones adecuadassiempre y cuando no se presente una perturbación que supere la región de estabilidad.
5.3 Resultados con el controlador Difuso en la articulación ID_9.
Partiendo del capitulo 4 se comprovo el limite de la region de estabilidad en la seccion4.4.1 cuando se configura la articulacion ID_18 a 14° en adenlate. Esto se observa tambienen la seccion anterior cuando se configura ID_18 en la posicion angular menor o igual a14°. Apartir de esto se incluira el controlador Difuso en la articulacion ID_9 para aumentarla region de estabilidad y mantener el Centro de Gravedad dentro de esta region deestabilidad.
Figura 5. 3. Modelo, caída libre por efecto de la gravedad. Articulación ID_9 con controlDifuso.
0 0.5 1 1.5 2
0
5
10
15
deg
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
N*m
s
Articulacion ID 18 (Tobillo)
ID_18
ID_9
CG
15°
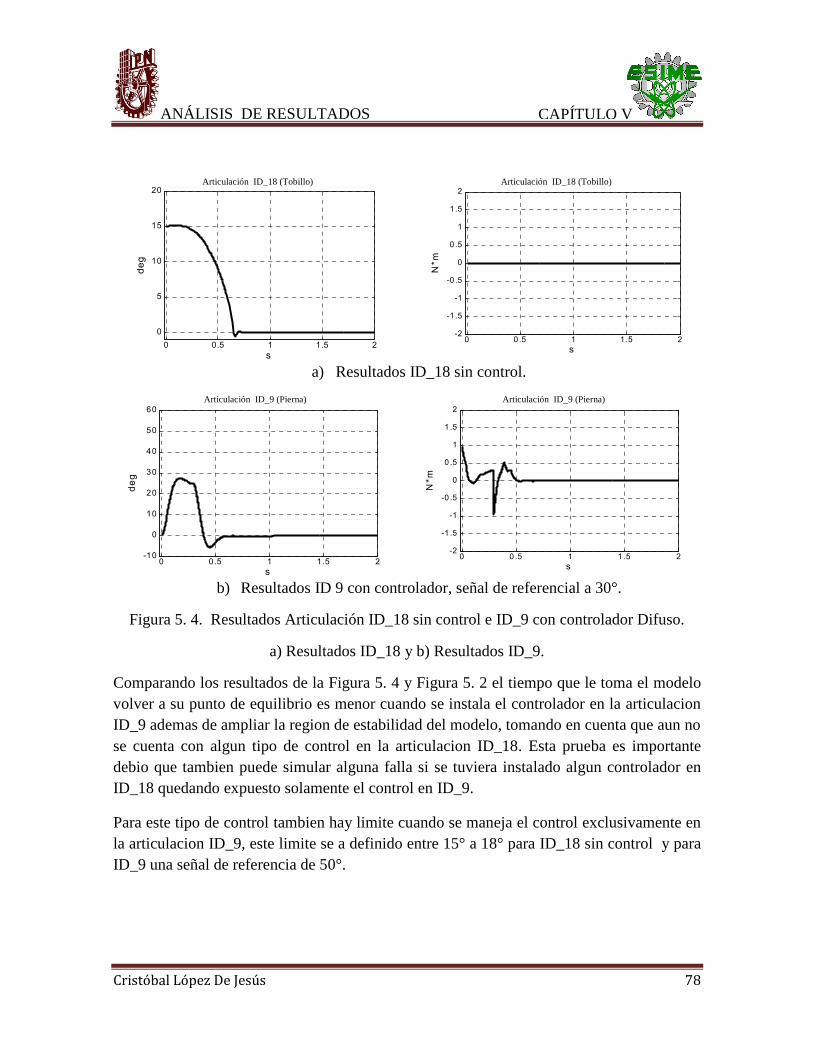
Cristóbal López De Jesús 78
ANÁLISIS DE RESULTADOS CAPÍTULO V
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Resultados ID_18 sin control.
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Resultados ID 9 con controlador, señal de referencial a 30°.
Figura 5. 4. Resultados Articulación ID_18 sin control e ID_9 con controlador Difuso.
a) Resultados ID_18 y b) Resultados ID_9.
Comparando los resultados de la Figura 5. 4 y Figura 5. 2 el tiempo que le toma el modelovolver a su punto de equilibrio es menor cuando se instala el controlador en la articulacionID_9 ademas de ampliar la region de estabilidad del modelo, tomando en cuenta que aun nose cuenta con algun tipo de control en la articulacion ID_18. Esta prueba es importantedebio que tambien puede simular alguna falla si se tuviera instalado algun controlador enID_18 quedando expuesto solamente el control en ID_9.
Para este tipo de control tambien hay limite cuando se maneja el control exclusivamente enla articulacion ID_9, este limite se a definido entre 15° a 18° para ID_18 sin control y paraID_9 una señal de referencia de 50°.
0 0.5 1 1.5 20
5
10
15
20
deg
s
0 0.5 1 1.5 2-2
-1 .5
-1
-0 .5
0
0.5
1
1.5
2
N*m
s
0 0.5 1 1.5 2-10
0
10
20
30
40
50
60
deg
s0 0 .5 1 1 .5 2
-2
-1 .5
-1
-0 .5
0
0 .5
1
1 .5
2
N*m
s
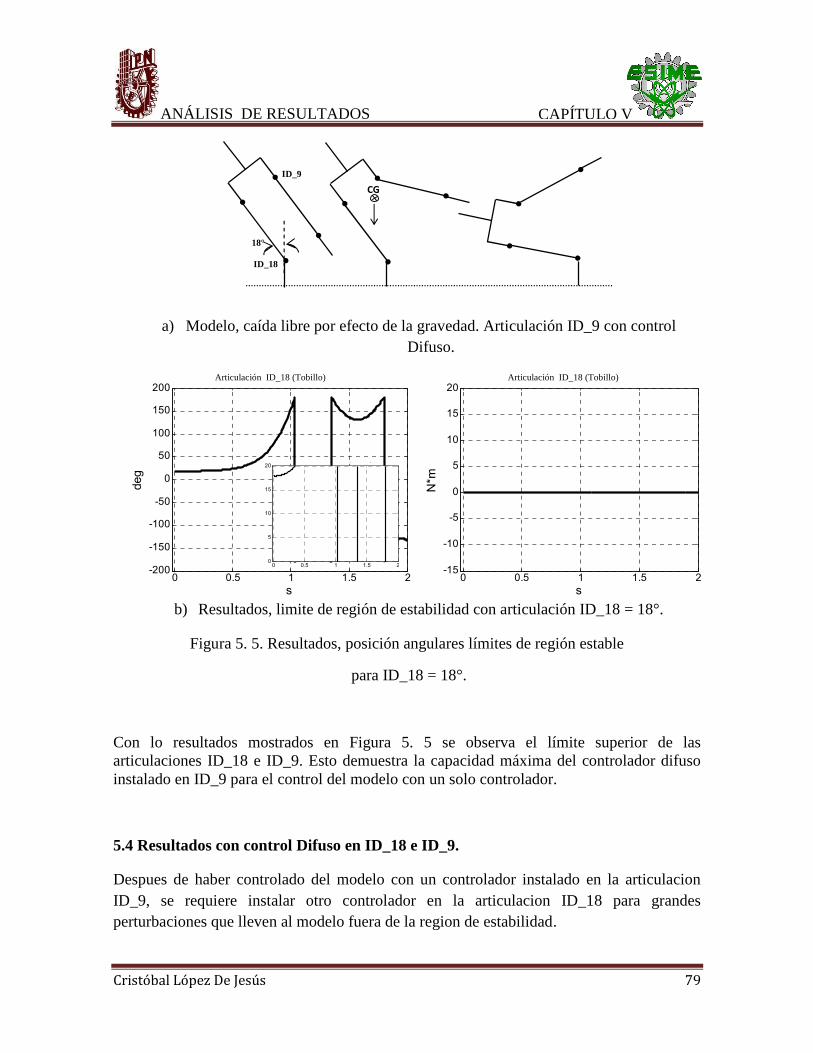
Cristóbal López De Jesús 79
ANÁLISIS DE RESULTADOS CAPÍTULO V
a) Modelo, caída libre por efecto de la gravedad. Articulación ID_9 con controlDifuso.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
b) Resultados, limite de región de estabilidad con articulación ID_18 = 18°.
Figura 5. 5. Resultados, posición angulares límites de región estable
para ID_18 = 18°.
Con lo resultados mostrados en Figura 5. 5 se observa el límite superior de lasarticulaciones ID_18 e ID_9. Esto demuestra la capacidad máxima del controlador difusoinstalado en ID_9 para el control del modelo con un solo controlador.
5.4 Resultados con control Difuso en ID_18 e ID_9.
Despues de haber controlado del modelo con un controlador instalado en la articulacionID_9, se requiere instalar otro controlador en la articulacion ID_18 para grandesperturbaciones que lleven al modelo fuera de la region de estabilidad.
0 0.5 1 1.5 2-200
-150
-100
-50
0
50
100
150
200
deg
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 2-15
-10
-5
0
5
10
15
20
N*m
s
Articulacion ID 18 (Tobillo)
0 0.5 1 1.5 20
5
10
15
20
deg
s
Articulacion ID 18 (Tobillo)
ID_18
ID_9
CG
18°
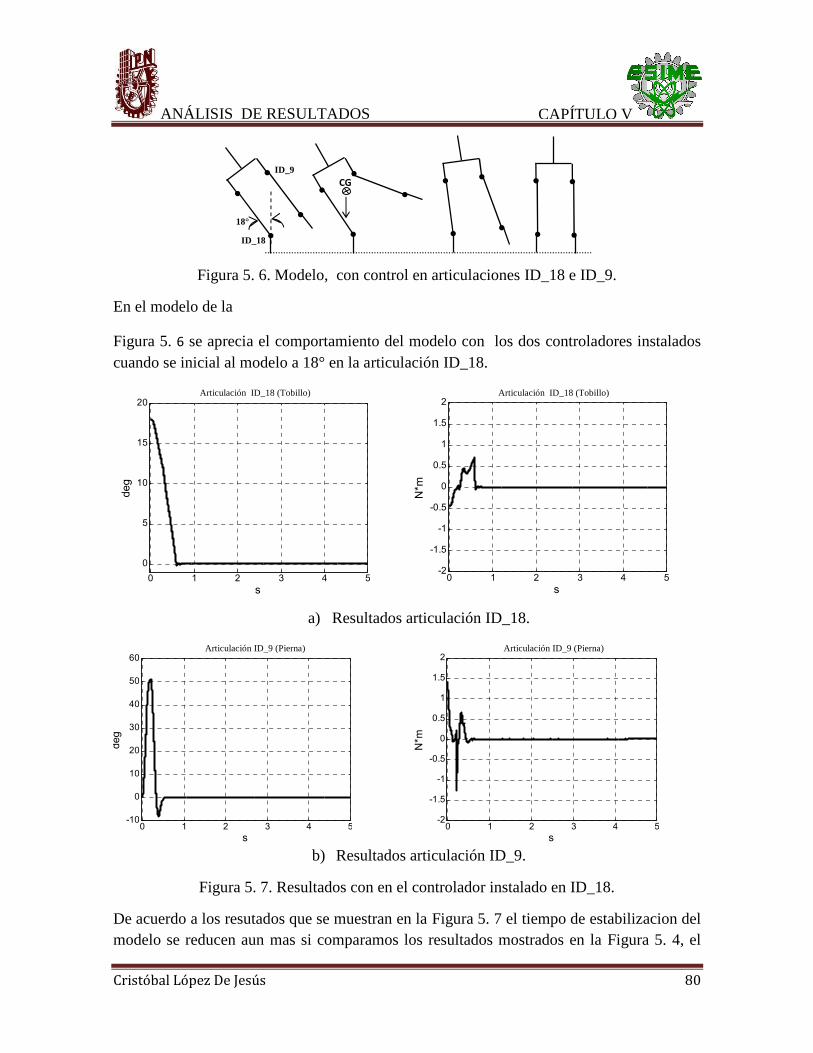
Cristóbal López De Jesús 80
ANÁLISIS DE RESULTADOS CAPÍTULO V
Figura 5. 6. Modelo, con control en articulaciones ID_18 e ID_9.
En el modelo de la
Figura 5. 6 se aprecia el comportamiento del modelo con los dos controladores instaladoscuando se inicial al modelo a 18° en la articulación ID_18.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Resultados articulación ID_18.
Articulación ID_9 (Pierna) Articulación ID_9 (Pierna)
b) Resultados articulación ID_9.
Figura 5. 7. Resultados con en el controlador instalado en ID_18.
De acuerdo a los resutados que se muestran en la Figura 5. 7 el tiempo de estabilizacion delmodelo se reducen aun mas si comparamos los resultados mostrados en la Figura 5. 4, el
0 1 2 3 4 50
5
10
15
20
deg
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-10
0
10
20
30
40
50
60
deg
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
ID_18
ID_9CG
18°
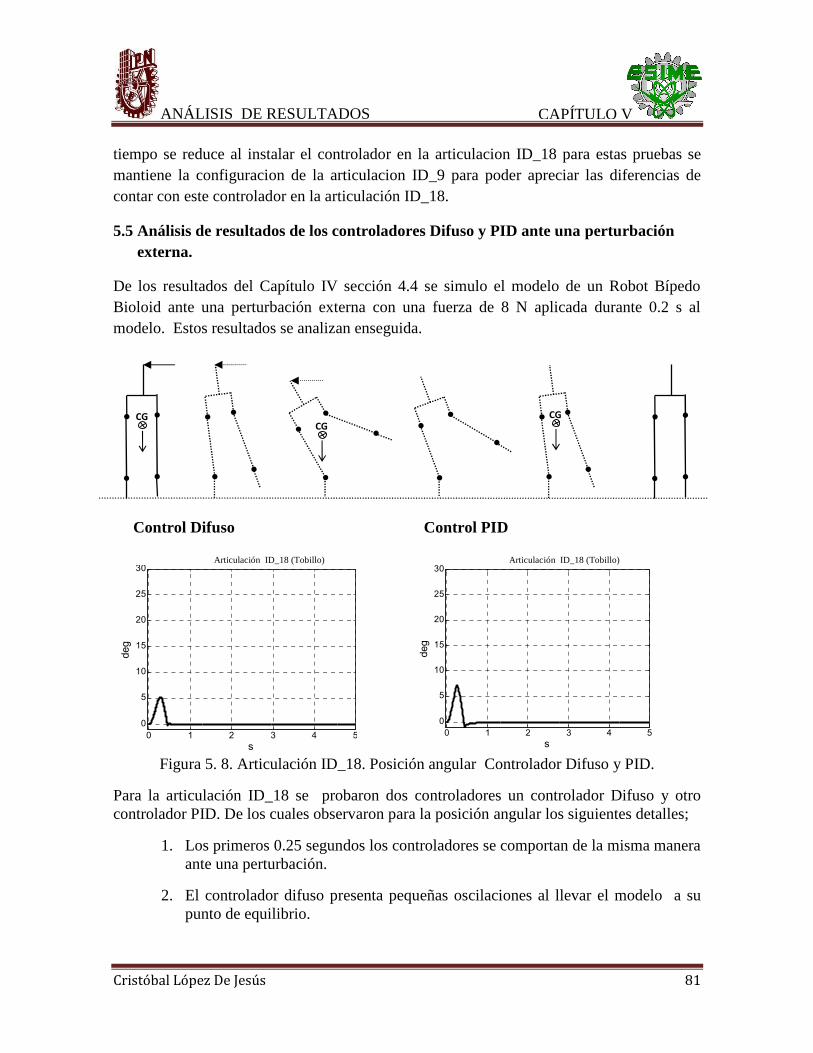
Cristóbal López De Jesús 81
ANÁLISIS DE RESULTADOS CAPÍTULO V
tiempo se reduce al instalar el controlador en la articulacion ID_18 para estas pruebas semantiene la configuracion de la articulacion ID_9 para poder apreciar las diferencias decontar con este controlador en la articulación ID_18.
5.5 Análisis de resultados de los controladores Difuso y PID ante una perturbaciónexterna.
De los resultados del Capítulo IV sección 4.4 se simulo el modelo de un Robot BípedoBioloid ante una perturbación externa con una fuerza de 8 N aplicada durante 0.2 s almodelo. Estos resultados se analizan enseguida.
Control Difuso Control PID
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
Figura 5. 8. Articulación ID_18. Posición angular Controlador Difuso y PID.
Para la articulación ID_18 se probaron dos controladores un controlador Difuso y otrocontrolador PID. De los cuales observaron para la posición angular los siguientes detalles;
1. Los primeros 0.25 segundos los controladores se comportan de la misma maneraante una perturbación.
2. El controlador difuso presenta pequeñas oscilaciones al llevar el modelo a supunto de equilibrio.
0 1 2 3 4 50
5
10
15
20
25
30
deg
s0 1 2 3 4 5
0
5
10
15
20
25
30
deg
s
CGCG
CG
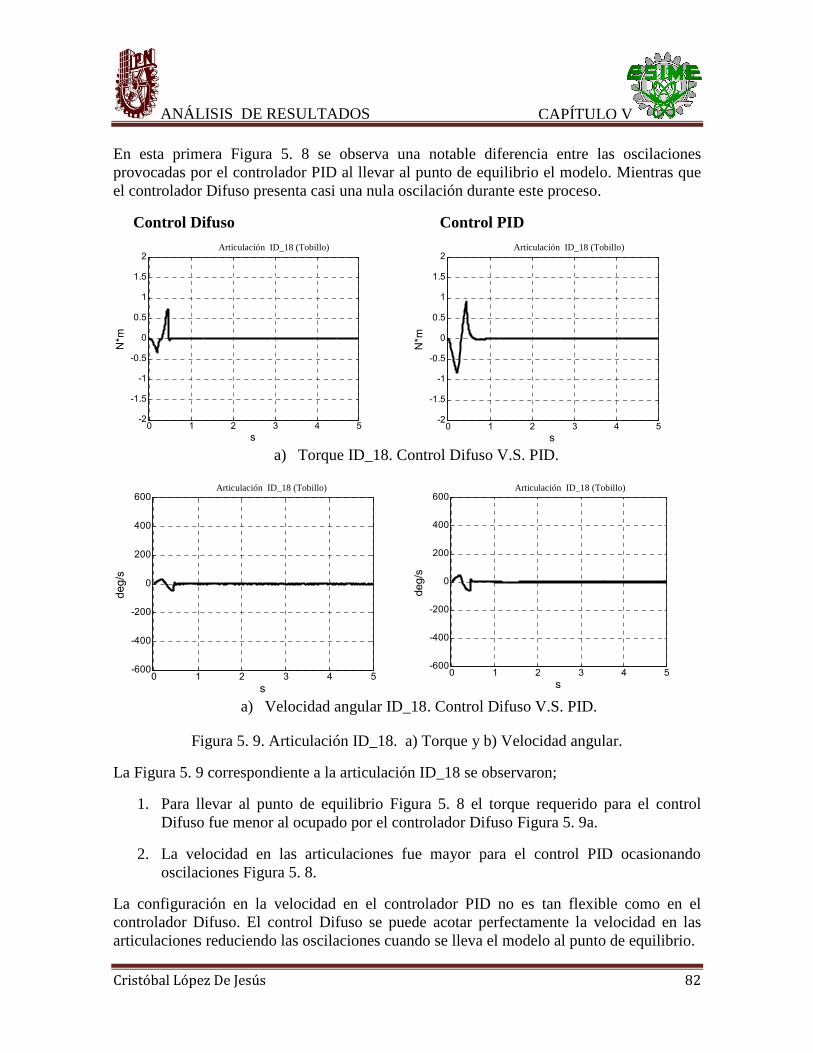
Cristóbal López De Jesús 82
ANÁLISIS DE RESULTADOS CAPÍTULO V
En esta primera Figura 5. 8 se observa una notable diferencia entre las oscilacionesprovocadas por el controlador PID al llevar al punto de equilibrio el modelo. Mientras queel controlador Difuso presenta casi una nula oscilación durante este proceso.
Control Difuso Control PIDArticulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Torque ID_18. Control Difuso V.S. PID.
Articulación ID_18 (Tobillo) Articulación ID_18 (Tobillo)
a) Velocidad angular ID_18. Control Difuso V.S. PID.
Figura 5. 9. Articulación ID_18. a) Torque y b) Velocidad angular.
La Figura 5. 9 correspondiente a la articulación ID_18 se observaron;
1. Para llevar al punto de equilibrio Figura 5. 8 el torque requerido para el controlDifuso fue menor al ocupado por el controlador Difuso Figura 5. 9a.
2. La velocidad en las articulaciones fue mayor para el control PID ocasionandooscilaciones Figura 5. 8.
La configuración en la velocidad en el controlador PID no es tan flexible como en elcontrolador Difuso. El control Difuso se puede acotar perfectamente la velocidad en lasarticulaciones reduciendo las oscilaciones cuando se lleva el modelo al punto de equilibrio.
0 1 2 3 4 5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s0 1 2 3 4 5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
N*m
s
0 1 2 3 4 5-600
-400
-200
0
200
400
600
deg/
s
s0 1 2 3 4 5
-600
-400
-200
0
200
400
600
deg/
s
s
Cristóbal López de Jesús 83
CONCLUSIONES CAPÍTULO VI
CAPÍTULO VICONCLUSIONES
6.1 Conclusiones.
De lo objetivos propuestos en el presente trabajo.
1.- Se diseño el modelo del robot bípedo para la implementación de los controladoresDifuso y PID.
2.- Se aplicaron y simularon los controladores en situaciones particulares de regiones deinestabilidad para el modelo diseñado.
3.- Las respuestas obtenidas de los controladores fueron comparados, observando susrendimientos en las diferentes situaciones propuestas.
Para el control Difuso fue necesario considerar que la pare proporcional no es suficientepara el control del modelo de un bípedo, por esta razón se toma en cuenta la partederivativa, obteniendo así un control Difuso PD.
La respuesta ante una perturbación (Control Difuso). Al simular una falla en la articulaciónde la rodilla, se propuso ampliar la región de estabilidad del Robot Bípedo utilizado lapierna, esto antes propuesto funciona con un límite de inclinación de la rodilla de 18°.
De la comparación entre el control Difuso y PID, el control difuso solo se utilizaron lasseñales proporcionales y derivativas para la el control, mientras tanto el PID no deja de serun buen controlador pero la sintonización. Pero se vuelve compleja en procesos de controlprecisos.
Para concluir podemos observar que en casi todos los casos un controlador difuso puedellegar a ser superior a un controlador PID, si bien es cierto esto, depende de la planta, delmétodo de ajuste del PID y de algunas otras características de la estructura del controladorPID. No deja de llamar la atención que un controlador difuso puede llegar a ser unaexcelente opción para suplir un controlador PID.
Una ventaja del controlador difuso a diferencia del control PID es que no se requiereconocer el modelo de la planta a controlar, aunque el control PID también puede llegar aser diseñado sin conocer el modelo, y en este caso ambos controles pueden ser usados conajustes experimentales para rápidamente dejar un sistema en funcionamiento con losrequerimientos necesarios.
Cristóbal López de Jesús 84
CONCLUSIONES CAPÍTULO VI
TRABAJOS FUTUROS
6.2 Trabajos futuros
En el presente trabajo se diseñaron los controladores para el modelo de un Robot BípedoBioloid, los cuales fueron aplicados y simulados al modelo mencionado, se realizandovarias pruebas en condiciones particulares propuestas, los cuales simulan algún estado deinestabilidad del modelo. Comentado esto se propone realizar simulaciones con diferentesestados, incluyendo ahora los brazos ampliando la región de estabilidad del modelo. Con loanterior propuesto se podrá generar un caminado bípedo con controladores que estabilicenel modelo ante perturbaciones externas durante la generación de caminado bípedo,considerando también los diferentes planos que componen la anatomía humana.
También se propone la implementación del control al Robot Bípedo Bioloid físicamentepara validar el control propuesto en este trabajo bajo las condiciones propuestas en estetrabajo y experimentar con los sensores que incluye los servomotores del robot yacelerómetros en el Robot Bípedo Bioloid.
Cristóbal López de Jesús 85
REFERENCIAS
REFERENCIAS
[1] B. Siciliano, O. Khatib, “Springer handbook of robotics” Springer, USA, 2008.
[2] ROBOTIS, “Bioloid Premium Kit Assembly Manual”, Copyrights © robotis.com AllRights Reserved.
[3] WowWee Group Limitedm,”User’s Manual Robosapien”, All Rights ReservedWowWee Ltd. ©2004.
[4] WowWee Group Limitedm,”User’s Manual Robosapien V2”, All Rights ReservedWowWee Ltd. ©2008.
[5]A Ferreyra, R Fuentes, “control difuso una alternativa para aplicaciones de altaprecisión", SOMI XIII Congreso de Instrumentación, pp 239-244, Octubre 1998, EnsenadaB.C.N., México.
[6]J. Timothy, “Fuzzy Logic with Engineering Applications”, 3a edición, Editorial JohnWilley & Sons, Ltd, ©2010.
[7] K. Ogata, “Ingeniería de control moderna” 3a edición, Editorial Prentice Hall, México,1998.
[8] S. N. Sivanandam,S. Sumathi,S. N. Deepa, “Introduction to fuzzy logic usingMATLAB”, Springer-Verlag Berlin Heidelberg, 2007.
[9] J. C. Gómez, “Fuzzy Control”, Editorial de la Universidad Tecnológica Nacional,Buenos aires, 2004.
[10] J. H. Park, “Fuzzy logic zero-moment-point trajectory generation for reduced trunkmotions of biped robots”, ELSERVIER, 2003.
[11] X. Zhao. Y. Liu, “Modeling of Biped Robot”, Institude of information and controlHangzhou Dianzi University, pp 189-203.
[12] The MatWorks, Inc., “SimMechanics TM 3 User´s Guide”, © Copyrigght 2010.
[13] The MatWorks, Inc., “Fuzzy Logic Toolbox - For Use with MATLAB”, © Copyright1995-2001.
Cristóbal López de Jesús 86
REFERENCIAS
[14] F. V. Ocampo, “Educación para la salud”, 1er edición, Editorial Limusa México 2004.
[15] A. Ferreyra, R. Fuentes, “Estudio Comparativo entre control PID y Difuso”, SOMIXV UAM-Azcapotzalco, Depto de Electrónica, México D.F.
[16] K. M. Passino, S.Yurkovich, “Fuzzy Control”, Firth Edition, ADDISON-WESLEY,California 1998.
[17] Li. Wang, “A Course in Fuzzy Systems and Control”, Firth Edition, Prentice HallPTR, London 1997.
[18] J. A. Meda-Campaña Member; IEEE, J.C.Gómez-Mancilla and B. Castillo-ToledoSenior Member; IEEE. “Exact output regulation for nonlinear systems described by Takagi-Sugeno fuzzy models”, IEEE Computational Intelligence Society.
Páginas de internet
[1w] http://www.robotis.com/xe/?mid=download_en&category=26096
[2w] http://world.honda.com/ASIMO/
[4w] http://www.wowwee.com
[5w] http://www.robotis.com
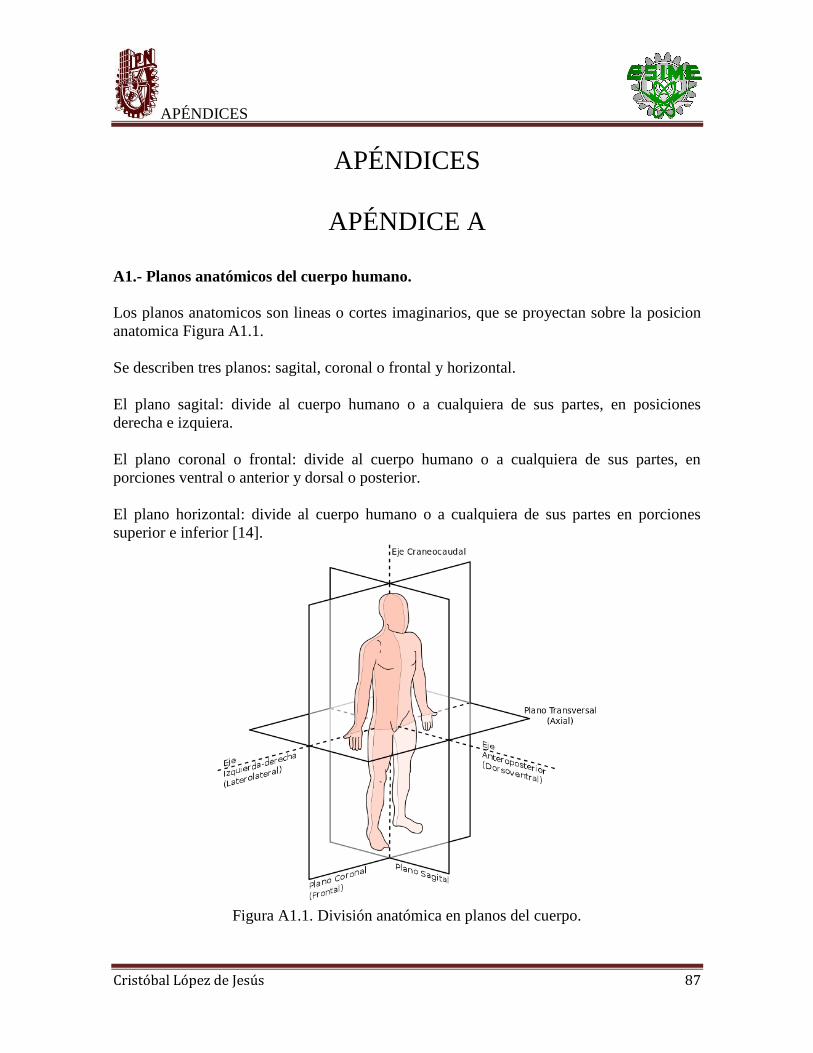
Cristóbal López de Jesús 87
APÉNDICES
APÉNDICES
APÉNDICE A
A1.- Planos anatómicos del cuerpo humano.
Los planos anatomicos son lineas o cortes imaginarios, que se proyectan sobre la posicionanatomica Figura A1.1.
Se describen tres planos: sagital, coronal o frontal y horizontal.
El plano sagital: divide al cuerpo humano o a cualquiera de sus partes, en posicionesderecha e izquiera.
El plano coronal o frontal: divide al cuerpo humano o a cualquiera de sus partes, enporciones ventral o anterior y dorsal o posterior.
El plano horizontal: divide al cuerpo humano o a cualquiera de sus partes en porcionessuperior e inferior [14].
Figura A1.1. División anatómica en planos del cuerpo.

Cristóbal López de Jesús 88
APÉNDICES
APÉNDICE B
B1.- Momentos de inercia.
A1
A2
A3 A4
Torso
A5
A6
A7
Los momentos de inercia necesarios para crear elmodelo del robot bípedo en Simmechanics, semuestran en la siguiente Tabla B1.1.
En la Figura B1.1 se muestran los bloques de cadamomento de inercia correspondientes al modelocreado en Simmechanics
Los momentos de inercia y productos de inercia secalculan de acuerdo con las siguientes definiciones:
La matriz de tensor de inercia se define de losmomentos de inercia:
Figura B1.1. Distribución de losbloques en las piernas.
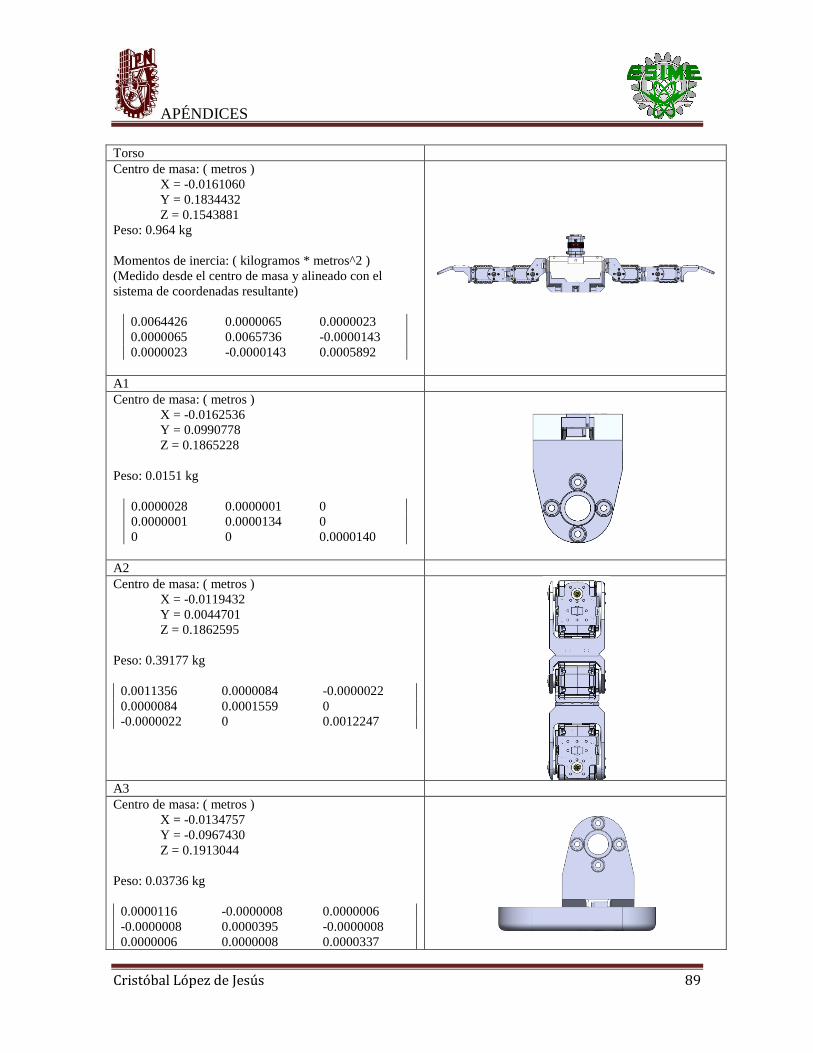
Cristóbal López de Jesús 89
APÉNDICES
TorsoCentro de masa: ( metros )
X = -0.0161060Y = 0.1834432Z = 0.1543881
Peso: 0.964 kg
Momentos de inercia: ( kilogramos * metros^2 )(Medido desde el centro de masa y alineado con elsistema de coordenadas resultante)
0.0064426 0.0000065 0.00000230.0000065 0.0065736 -0.00001430.0000023 -0.0000143 0.0005892
A1Centro de masa: ( metros )
X = -0.0162536Y = 0.0990778Z = 0.1865228
Peso: 0.0151 kg
0.0000028 0.0000001 00.0000001 0.0000134 00 0 0.0000140
A2Centro de masa: ( metros )
X = -0.0119432Y = 0.0044701Z = 0.1862595
Peso: 0.39177 kg
0.0011356 0.0000084 -0.00000220.0000084 0.0001559 0-0.0000022 0 0.0012247
A3Centro de masa: ( metros )
X = -0.0134757Y = -0.0967430Z = 0.1913044
Peso: 0.03736 kg
0.0000116 -0.0000008 0.0000006-0.0000008 0.0000395 -0.00000080.0000006 0.0000008 0.0000337
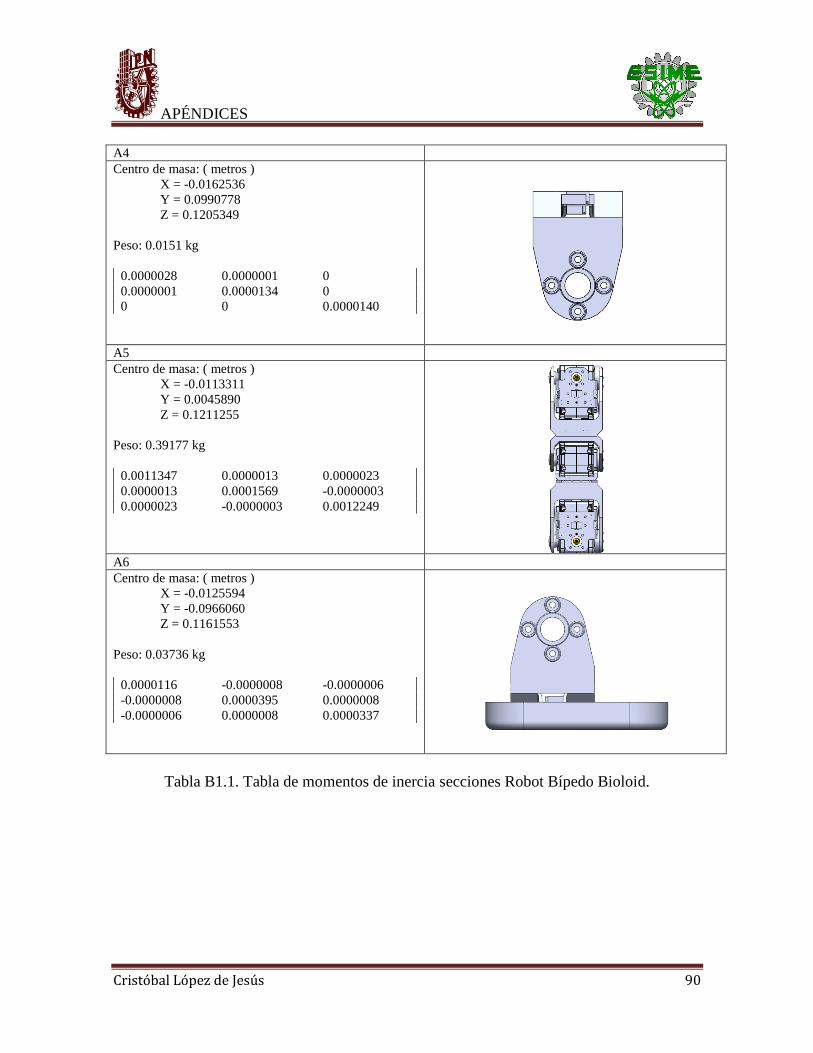
Cristóbal López de Jesús 90
APÉNDICES
A4Centro de masa: ( metros )
X = -0.0162536Y = 0.0990778Z = 0.1205349
Peso: 0.0151 kg
0.0000028 0.0000001 00.0000001 0.0000134 00 0 0.0000140
A5Centro de masa: ( metros )
X = -0.0113311Y = 0.0045890Z = 0.1211255
Peso: 0.39177 kg
0.0011347 0.0000013 0.00000230.0000013 0.0001569 -0.00000030.0000023 -0.0000003 0.0012249
A6Centro de masa: ( metros )
X = -0.0125594Y = -0.0966060Z = 0.1161553
Peso: 0.03736 kg
0.0000116 -0.0000008 -0.0000006-0.0000008 0.0000395 0.0000008-0.0000006 0.0000008 0.0000337
Tabla B1.1. Tabla de momentos de inercia secciones Robot Bípedo Bioloid.
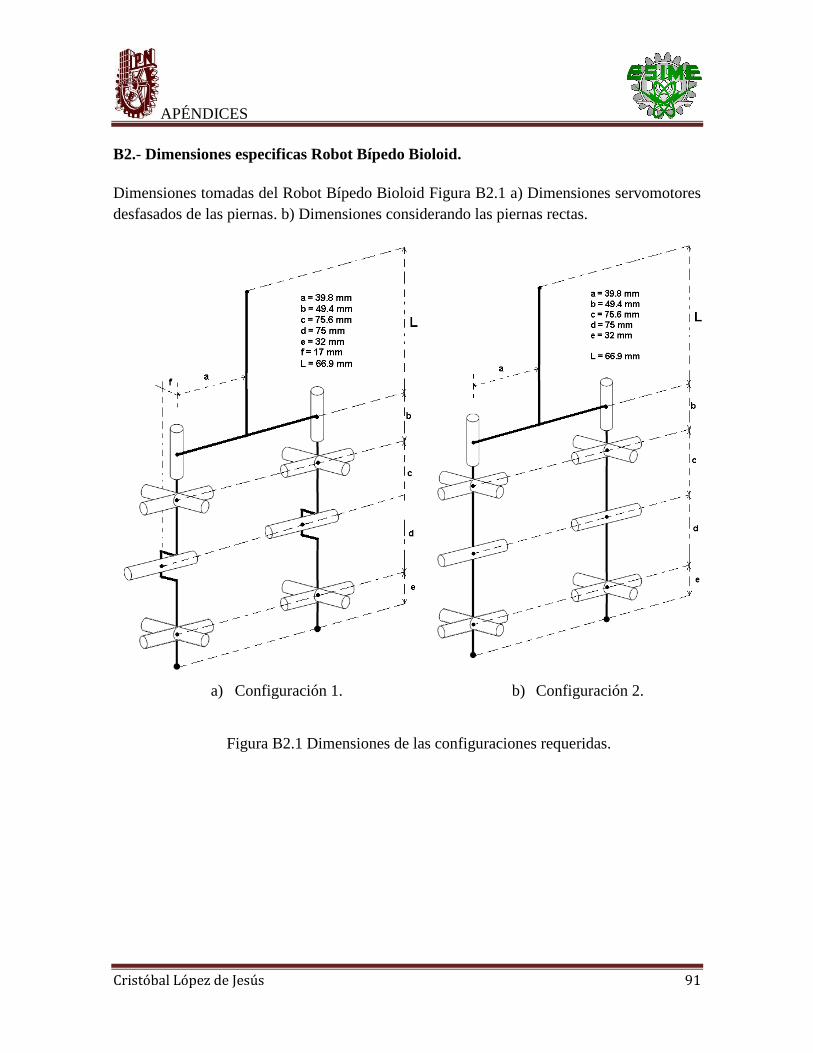
Cristóbal López de Jesús 91
APÉNDICES
B2.- Dimensiones especificas Robot Bípedo Bioloid.
Dimensiones tomadas del Robot Bípedo Bioloid Figura B2.1 a) Dimensiones servomotoresdesfasados de las piernas. b) Dimensiones considerando las piernas rectas.
a) Configuración 1. b) Configuración 2.
Figura B2.1 Dimensiones de las configuraciones requeridas.
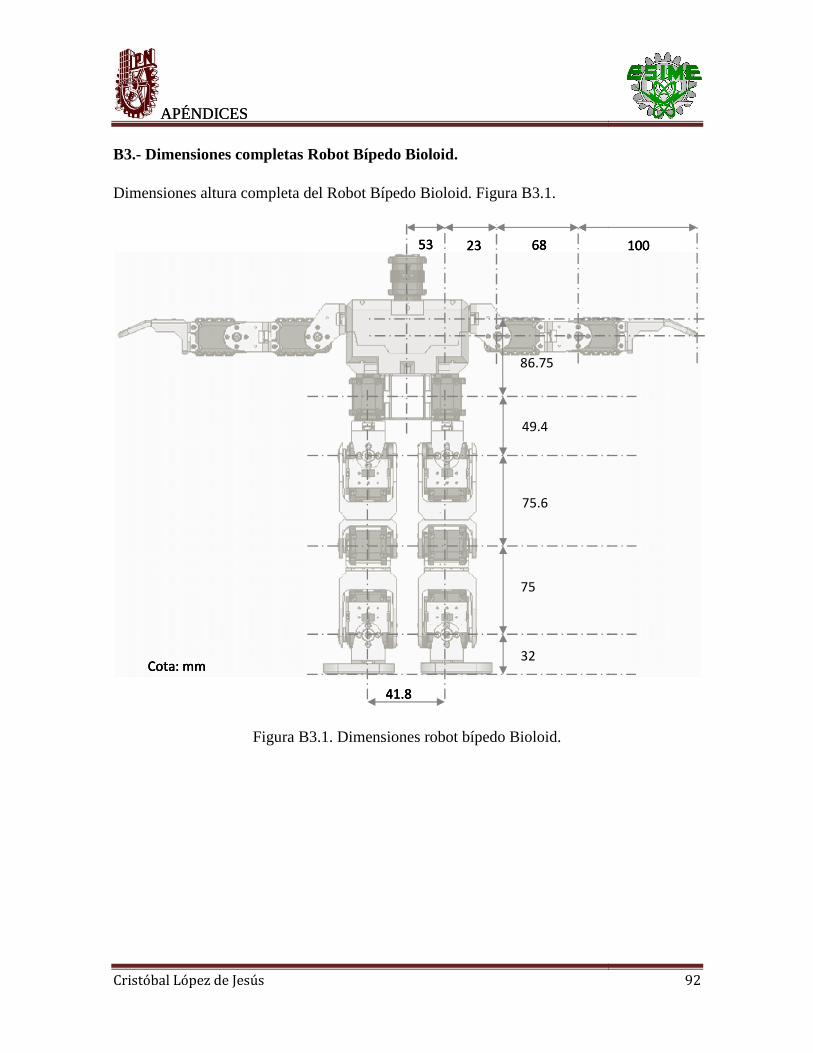
Cristóbal López de Jesús 92
APÉNDICES
B3.- Dimensiones completas Robot Bípedo Bioloid.
Dimensiones altura completa del Robot Bípedo Bioloid. Figura B3.1.
Figura B3.1. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
Cristóbal López de Jesús 92
APÉNDICES
B3.- Dimensiones completas Robot Bípedo Bioloid.
Dimensiones altura completa del Robot Bípedo Bioloid. Figura B3.1.
Figura B3.1. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
Cristóbal López de Jesús 92
APÉNDICES
B3.- Dimensiones completas Robot Bípedo Bioloid.
Dimensiones altura completa del Robot Bípedo Bioloid. Figura B3.1.
Figura B3.1. Dimensiones robot bípedo Bioloid.
Cota: mm
49.4
75.6
75
32
41.8
53mm
23 68 100
86.75
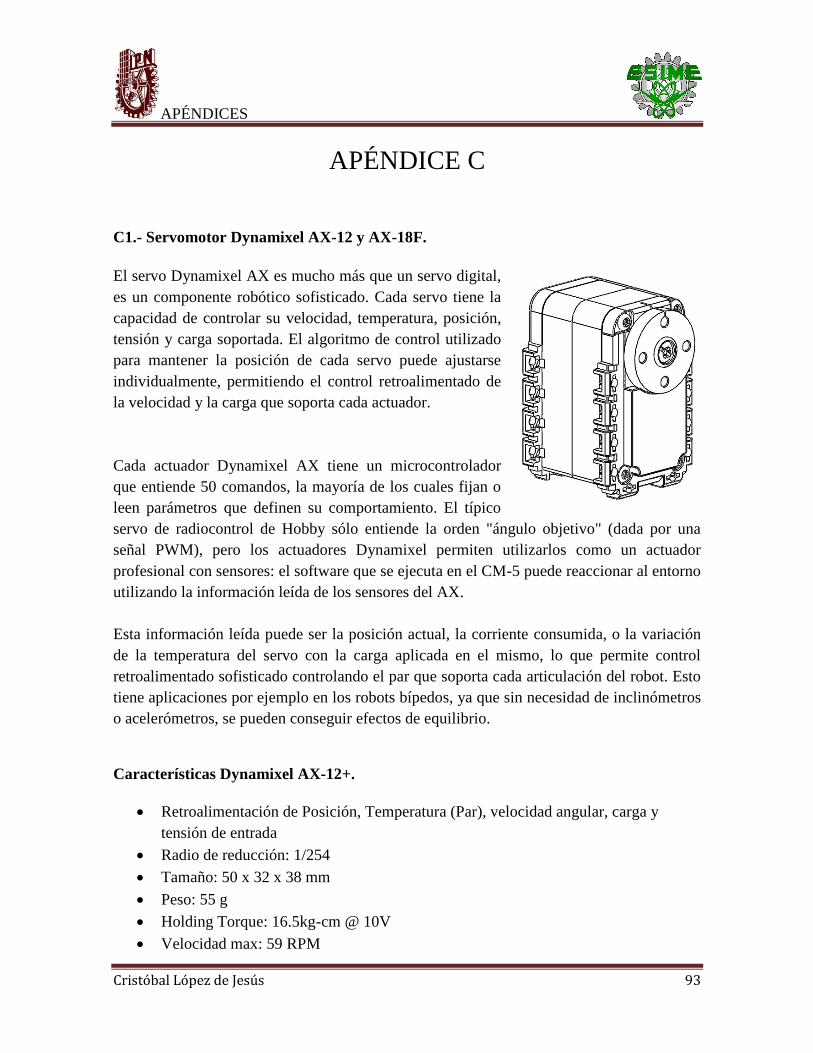
Cristóbal López de Jesús 93
APÉNDICES
APÉNDICE C
C1.- Servomotor Dynamixel AX-12 y AX-18F.
El servo Dynamixel AX es mucho más que un servo digital,es un componente robótico sofisticado. Cada servo tiene lacapacidad de controlar su velocidad, temperatura, posición,tensión y carga soportada. El algoritmo de control utilizadopara mantener la posición de cada servo puede ajustarseindividualmente, permitiendo el control retroalimentado dela velocidad y la carga que soporta cada actuador.
Cada actuador Dynamixel AX tiene un microcontroladorque entiende 50 comandos, la mayoría de los cuales fijan oleen parámetros que definen su comportamiento. El típicoservo de radiocontrol de Hobby sólo entiende la orden "ángulo objetivo" (dada por unaseñal PWM), pero los actuadores Dynamixel permiten utilizarlos como un actuadorprofesional con sensores: el software que se ejecuta en el CM-5 puede reaccionar al entornoutilizando la información leída de los sensores del AX.
Esta información leída puede ser la posición actual, la corriente consumida, o la variaciónde la temperatura del servo con la carga aplicada en el mismo, lo que permite controlretroalimentado sofisticado controlando el par que soporta cada articulación del robot. Estotiene aplicaciones por ejemplo en los robots bípedos, ya que sin necesidad de inclinómetroso acelerómetros, se pueden conseguir efectos de equilibrio.
Características Dynamixel AX-12+.
Retroalimentación de Posición, Temperatura (Par), velocidad angular, carga ytensión de entrada
Radio de reducción: 1/254 Tamaño: 50 x 32 x 38 mm
Peso: 55 g Holding Torque: 16.5kg-cm @ 10V Velocidad max: 59 RPM
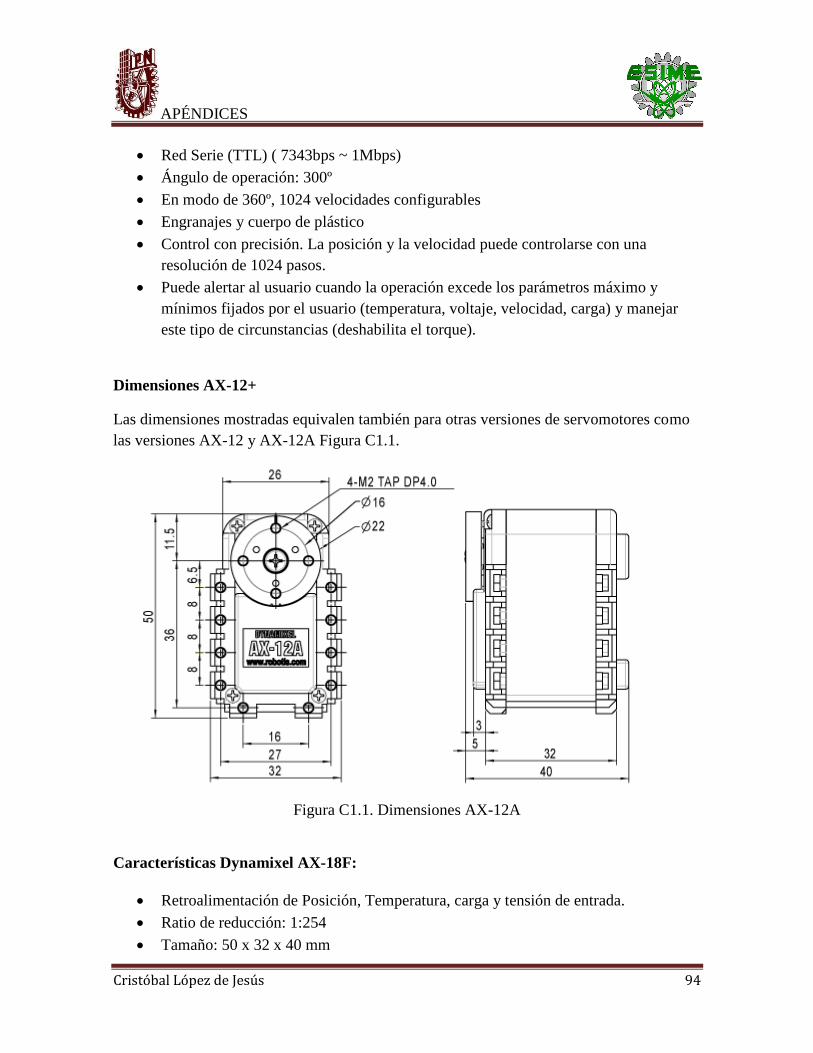
Cristóbal López de Jesús 94
APÉNDICES
Red Serie (TTL) ( 7343bps ~ 1Mbps) Ángulo de operación: 300º
En modo de 360º, 1024 velocidades configurables Engranajes y cuerpo de plástico
Control con precisión. La posición y la velocidad puede controlarse con unaresolución de 1024 pasos.
Puede alertar al usuario cuando la operación excede los parámetros máximo ymínimos fijados por el usuario (temperatura, voltaje, velocidad, carga) y manejareste tipo de circunstancias (deshabilita el torque).
Dimensiones AX-12+
Las dimensiones mostradas equivalen también para otras versiones de servomotores comolas versiones AX-12 y AX-12A Figura C1.1.
Figura C1.1. Dimensiones AX-12A
Características Dynamixel AX-18F:
Retroalimentación de Posición, Temperatura, carga y tensión de entrada. Ratio de reducción: 1:254
Tamaño: 50 x 32 x 40 mm

Cristóbal López de Jesús 95
APÉNDICES
Peso: 54,5g g Holding Torque: 18kgf-cm (a 12V, 2,2A)
Resolución: 0,29º Velocidad max: 97 RPM
Red Serie en daisy chain (bus TTL de Bioloid) ( 7343bps ~ 1Mbps) Ángulo de operación: 300º o rotación continúa para ruedas. En modo de 360º, 1024 velocidades configurables
Engranajes y cuerpo de plástico Detección de errores, y desconexión de la carga para protección. Monitorización de
errores con un led.
Dimensiones AX-18F
Las dimensiones de del la versión AX-18 es compatible con los servomotores AX-12+ yAX-18A Figura C1.2.
Figura C1.2. Dimensiones AX-18A

Cristóbal López de Jesús 96
APÉNDICES
C2.- CM-510.
El CM-510 es el controlador central autónomo delsistema robótico Bioloid, y está diseñado paraalmacenar y ejecutar los programas que controlanlos robots que utilizan la serie AX de Dynamixel(opera con actuadores AX-12+, sensores AX-S1,etc.). La placa del controlador está encapsulada enuna caja de plástico resistente con espacio para labatería recargable de 9,6V, rodeada de una sólida carcasa. Está basado en el popular,poderoso y versátil microcontrolador de Atmel, Atmega128 de 16 MHz Por lo tanto, paraprogramadores avanzados, es posible programar el controlador CM-510 en lenguaje Cmediante el excelente compilador freeware GNU GCC WinAVR.
El controlador CM-510 puede ampliarse para operar inalámbricamente, conectando losmódulos inalámbricos ZIG-100 que usan el protocolo ZigBee. Conectando un módulo ZIG-100 en dos controladores CM-510 los robots podrán intercambiar información ycomunicarse ideal para aplicaciones de robótica colaborativa.
Características: Microcontrolador Atmega128 de 16 MHz de Atmel. 128 Kbyte de memoria flash.
Fusible de protección. Función de recarga de las baterías de 9,6V AA NiMH.
Posibilidad de operar con una batería de 9V. Tensión de trabajo: 7V ~ 12V.
Interfaces: 4 Conectores para puertos serie Dynamixel (Serie AX) ZIG-100 (Posibilidad de conectar el módulo de comunicación inalámbrica)
LED: TX, RX, AUX Puerto serie RS-232 (Conexión al PC)
6 botones de control 3 modos de operación: PLAY (Behavior control program), MANAGE (operación
de Dynamixel) y PROGRAM (Motion Editor).
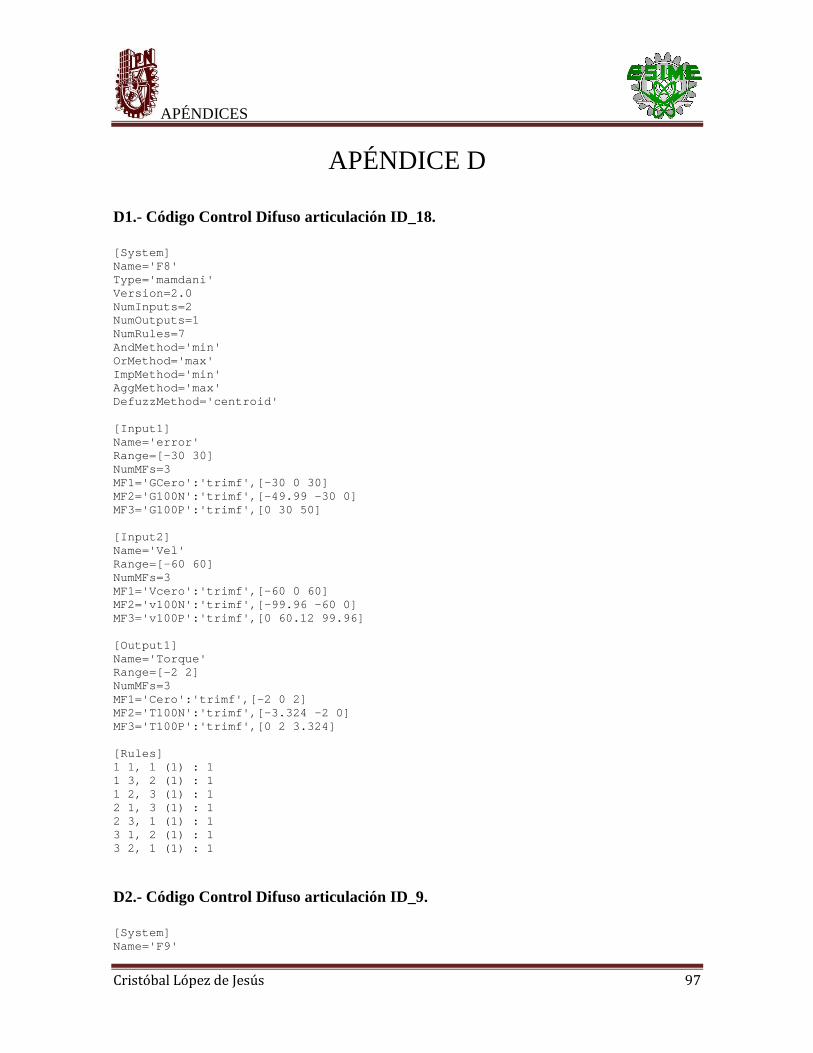
Cristóbal López de Jesús 97
APÉNDICES
APÉNDICE D
D1.- Código Control Difuso articulación ID_18.
[System]Name='F8'Type='mamdani'Version=2.0NumInputs=2NumOutputs=1NumRules=7AndMethod='min'OrMethod='max'ImpMethod='min'AggMethod='max'DefuzzMethod='centroid'
[Input1]Name='error'Range=[-30 30]NumMFs=3MF1='GCero':'trimf',[-30 0 30]MF2='G100N':'trimf',[-49.99 -30 0]MF3='G100P':'trimf',[0 30 50]
[Input2]Name='Vel'Range=[-60 60]NumMFs=3MF1='Vcero':'trimf',[-60 0 60]MF2='v100N':'trimf',[-99.96 -60 0]MF3='v100P':'trimf',[0 60.12 99.96]
[Output1]Name='Torque'Range=[-2 2]NumMFs=3MF1='Cero':'trimf',[-2 0 2]MF2='T100N':'trimf',[-3.324 -2 0]MF3='T100P':'trimf',[0 2 3.324]
[Rules]1 1, 1 (1) : 11 3, 2 (1) : 11 2, 3 (1) : 12 1, 3 (1) : 12 3, 1 (1) : 13 1, 2 (1) : 13 2, 1 (1) : 1
D2.- Código Control Difuso articulación ID_9.
[System]Name='F9'
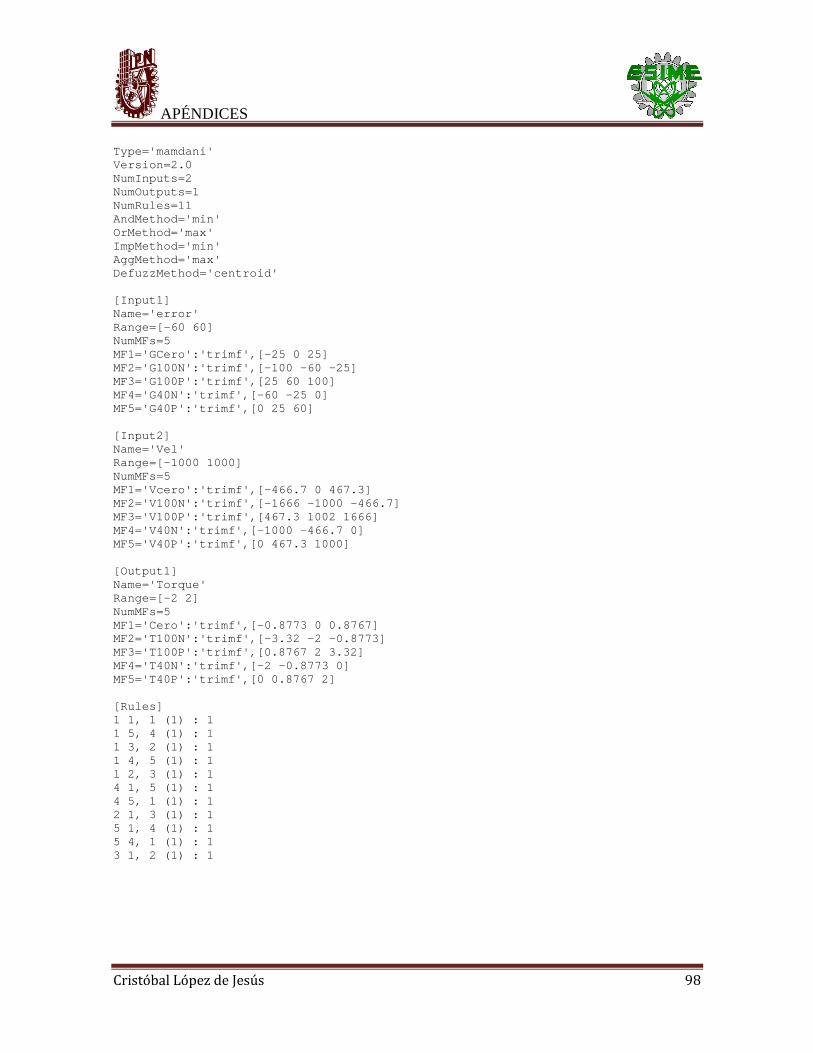
Cristóbal López de Jesús 98
APÉNDICES
Type='mamdani'Version=2.0NumInputs=2NumOutputs=1NumRules=11AndMethod='min'OrMethod='max'ImpMethod='min'AggMethod='max'DefuzzMethod='centroid'
[Input1]Name='error'Range=[-60 60]NumMFs=5MF1='GCero':'trimf',[-25 0 25]MF2='G100N':'trimf',[-100 -60 -25]MF3='G100P':'trimf',[25 60 100]MF4='G40N':'trimf',[-60 -25 0]MF5='G40P':'trimf',[0 25 60]
[Input2]Name='Vel'Range=[-1000 1000]NumMFs=5MF1='Vcero':'trimf',[-466.7 0 467.3]MF2='V100N':'trimf',[-1666 -1000 -466.7]MF3='V100P':'trimf',[467.3 1002 1666]MF4='V40N':'trimf',[-1000 -466.7 0]MF5='V40P':'trimf',[0 467.3 1000]
[Output1]Name='Torque'Range=[-2 2]NumMFs=5MF1='Cero':'trimf',[-0.8773 0 0.8767]MF2='T100N':'trimf',[-3.32 -2 -0.8773]MF3='T100P':'trimf',[0.8767 2 3.32]MF4='T40N':'trimf',[-2 -0.8773 0]MF5='T40P':'trimf',[0 0.8767 2]
[Rules]1 1, 1 (1) : 11 5, 4 (1) : 11 3, 2 (1) : 11 4, 5 (1) : 11 2, 3 (1) : 14 1, 5 (1) : 14 5, 1 (1) : 12 1, 3 (1) : 15 1, 4 (1) : 15 4, 1 (1) : 13 1, 2 (1) : 1
Copyright © 2022 FDOKUMEN