Skúsenosť s prechodom od LMS Moodle ku cloudovému LMS iSmart
IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004 313
Active Mitigation of Nonlinear Noise ProcessesUsing a Novel Filtered-s LMS Algorithm
Debi Prasad Das and Ganapati Panda, Senior Member, IEEE
Abstract—In many practical applications the acoustic noisegenerated from dynamical systems is nonlinear and deterministicor stochastic, colored, and non-Gaussian. It has been reportedthat the linear techniques used to control such noise exhibit degra-dation in performance. In addition, the actuators of an activenoise control (ANC) system very often have nonminimum-phaseresponse. A linear controller under such situations can not modelthe inverse of the actuator, and hence yields poor performance. Anovel filtered-s least mean square (FSLMS) algorithm based ANCstructure, which functions as a nonlinear controller, is proposedin this paper. A fast implementation scheme of the FSLMS algo-rithm is also presented. Computer simulations have been carriedout to demonstrate that the proposed algorithm outperformsthe standard filtered-x least mean square (FXLMS) algorithmand even performs better than the recently proposed Volterrafiltered-x least mean square (VFXLMS) algorithm, in terms ofmean square error (MSE), for active control of nonlinear noiseprocesses. An evaluation of the computational requirements showsthat the FSLMS algorithm offers a computational advantage overVFXLMS when the secondary path estimate is of length less than6. However, the fast implementation of the FSLMS algorithmsubstantially reduces the number of operations compared to thatof FSLMS as well as VFXLMS algorithm.
Index Terms—Active noise control, chaotic noise, functional linkartificial neural network, nonlinearity issues, nonminimum-phasesecondary path estimate.
I. INTRODUCTION
THE exponential increase of noise pollution and ineffective-ness of passive techniques for noise mitigation have led to
the development of active noise control (ANC) system [1]–[6].The conventional ANC system is essentially linear in nature andhas been successfully applied in controlling both broadband andnarrowband noise sources. The application areas are heating,ventilating, and air-conditioning (HVAC) systems [4], [5], ex-haust and motor noise [4], [7], headsets [4], [6], and airplanes[4]. The principle of destructive interference between a primarynoise source and a secondary source is employed in the devel-opment of an ANC system.
Manuscript received August 10, 2002; revised October 1, 2003. The associateeditor coordinating the review of this manuscript and approving it for publica-tion was Dr. Walter Kellermann.
D. P. Das was with the Department of Applied Electronics and Instrumen-tation Engineering, National Institute of Technology, (Formerly Regional En-gineering College), Rourkela, 769008 Orissa, India. He is now with the De-partment of Electronics, Telecommunication and Instrumentation Engineering,Silicon Institute of Technology, Bhubaneswar, 751031 Orissa, India (e-mail:[email protected]).
G. Panda is with the Department of Applied Electronics and InstrumentationEngineering, National Institute of Technology, (Formerly Regional EngineeringCollege), Rourkela, 769008 Orissa, India (e-mail: [email protected]).
Digital Object Identifier 10.1109/TSA.2003.822741
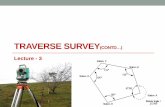
Fig. 1. Schematic diagram of single-channel ANC.
The schematic diagram of a typical ANC system in a ductis shown in Fig. 1. A reference signal is sensed by a referencemicrophone close to the noise source before it passes by thecanceling loudspeaker. The noise canceller uses the referencesignal to generate a signal of equal amplitude but 180 out ofphase. This antinoise signal is used to drive the loudspeaker toproduce a canceling sound that attenuates the primary acousticnoise in the duct. The basic principle of the broadband feedfor-ward approach is that the propagation time delay between theupstream noise sensor (reference microphone) and the activecontrol source (speaker) offers the opportunity to acousticallyreintroduce the noise at a position in the field where it causescancellation. The spacing between the microphone and the loud-speaker must satisfy the principles of causality and high coher-ence, i.e., the reference signal must be measured early enoughso that the antinoise signal can be generated by the time thenoise signal reaches the speaker. The error microphone mea-sures the residual error signal, which is used to adapt the filtercoefficients to minimize this error. Actual implementations re-quire additional considerations to handle acoustic effects in theduct.
The controller has to be adaptive because of changes inenvironment, degradation of system components, and alterationof the noise source [4]. Most of the conventional ANC’s arelinear in nature and they employ the standard filtered-x LMS(FXLMS) algorithm [1], [2]. Even though this algorithminvolves less computational complexity for active controlof broadband and narrowband noise, a linear ANC showsperformance degradation under the following situations.
1) The components of the ANC system might exhibit non-linearities themselves. The loudspeaker, for example, canexcite both the frequency of interest and its associatedharmonics [4], [6], [8]. The noise from a dynamic systemmay be a nonlinear and deterministic (chaotic rather than
1063-6676/04$20.00 © 2004 IEEE
314 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004
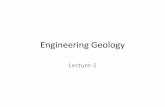
TABLE IILLUSTRATION OF TENSOR MODEL
stochastic, white, or tonal) noise process. For example,fan noise often shows chaotic behavior [7], [9].
2) The primary noise at the cancellation point may exhibitnonlinear distortion due to the nonlinear transfer functionof the primary path [7], for example, primary noise prop-agating in a duct with very high sound pressure [10].
3) The secondary path transfer function between thespeaker and the error microphone may exhibit nonmin-imum-phase response[4], [7].
In the recent literature, several methods have been proposed[4], [7], [10]–[12] for active control of nonlinear noise pro-cesses, which consist of two parts: a linear system identifica-tion part and a nonlinear prediction part. They have demon-strated that the FXLMS algorithm [1] is not capable of traininga nonlinear controller, as this algorithm exploits the linearityof the controller. They have proposed alternative architecturesto circumvent this problem. In [4] a nonlinear controller basedon a normalized Gaussian radial basis neural network is pro-posed to compensate the nonminimum-phase secondary pathtransfer function and control the nonlinear noise process. Neuralnetworks and recurrent neural networks have also been used[11], [12] to control the nonlinear effects in the secondary pathtransfer function. In a recent paper [7], adaptive Volterra fil-ters have been introduced for feedforward ANC. The authorsof [7] have developed a Volterra filtered-x LMS (VFXLMS) al-gorithm based on a multi-channel structure and have shown thatit achieves better cancellation performance for two situations.
1) The noise signal received by a reference microphone isnonlinear and predictable (Chaotic), while the secondarypath transfer function has nonminimum-phase.
2) The primary path exhibits nonlinearity.Observations of various structures and algorithms reported
in [4], [7], [10]–[12] reveal that the structures are either com-plex and/or the algorithms used are computationally expensive.Hence, there is a potential need for a simple nonlinear controlstructure that is economical to implement and would offer atleast similar or even better performance than the existing tech-niques. Keeping this in view, the present investigation has beencarried out to evolve a simple nonlinear controller for active con-trol of nonlinear noise processes. A single-layer functional linkartificial neural network (FLANN) [13] has been employed todevelop a new filtered-s LMS (FSLMS) algorithm to achievethis objective. A fast implementation scheme of the FSLMS al-gorithm has also been proposed.
The organization of the paper is as follows. In Section II, theFLANN is introduced and its mathematical treatment is pre-
sented. This structure is used to develop a nonlinear active noisecontroller in Section III. A new filtered-s LMS algorithm andits fast implementation scheme are developed in this Sectionusing the FLANN structure. Comparison of the computationalcomplexity of FSLMS and VFXLMS algorithms is also pre-sented in this Section. Section IV investigates the suitability ofthe FSLMS algorithm in mitigating a nonlinear noise processwith a nonminimum-phase secondary path estimate of the ANCsystem. Section V provides computer simulation studies of theproposed controller. Finally, conclusions are presented in Sec-tion VI.
II. FUNCTIONAL-LINK ARTIFICIAL NEURAL NETWORK
The functional link artificial neural network (FLANN) [13]is a useful alternative to the multilayer artificial neural network(MLANN) [14]. It has the advantage of involving less compu-tational complexity and a simple structure for hardware imple-mentation [13], [15]. The basic principle, the characteristic fea-ture, and the mathematical treatment of FLANN are discussednext.
The conventional MLANN proposed by Rumelhart et al. [16]involves linear links. An alternative approach is also possible,whereby the functional link concept is used, which acts on anelement of a pattern or the entire pattern itself and generates aset of linearly independent functions. By this process, no newad hoc information is inserted into the process but the repre-sentation gets enhanced. It has been reported [13], [15] that thefunctional link approach simplifies the learning algorithms andunifies the architecture for all types of nets. The new net is ca-pable of accommodating three tasks: supervised learning, asso-ciative storage and recall, and unsupervised learning.
In the functional link model an elementis expanded to . Various types of func-tional expansion models are possible. Three representativeexamples are power series expansion, trigonometry expansion,and tensor or outer product. In the power series expan-sion model, an element , is enhanced to
, with a constraint . In the case ofa trigonometric expansion of order , each input element
is mapped to .In the tensor model, a set of inputs is mapped as
with , and . In this model, the total numberof expanded components depends upon the number of inputelements. Table I illustrates the tensor model expansion for
, and .

DAS AND PANDA: ACTIVE MITIGATION OF NONLINEAR NOISE PROCESSES USING A NOVEL FILTERED-s LMS ALGORITHM 315
Let us consider the problem of learning with a flat net, whichis a net with no hidden layers. Let be the input patternseach with elements. The net configuration has one output.For the th pattern, the input components areand the corresponding output is . The connecting weightsare and the threshold is denoted by . Thusis given by
(1)
Arranging all patterns, we can write
...
...
.... . .
...
.... . .
...
...
...
(2)
or in matrix form
(3)
The dimension of is .If and , then
(4)
Thus, finding the weights for a flat net consists of solving asystem of simultaneous linear equations for the weights .
If can be partitioned into a functional matrixof dimension . By setting
, and since may be expressed as
(5)
Equation (5) yields only one solution. But if the matrix isnot partitioned explicitly, then (4) yields a large number of so-lutions, all of which satisfy the given constraints.
But if , then we have
(6)
where are of dimensionsand , respectively.
By the functional expansion scheme, a column of is en-hanced from elements to , producing a matrix sothat . Under this circumstance, we have
(7)
where are of dimensions , re-spectively. If and , then
(8)
Equation (8) is an exact flat net solution. However, if ,the solution is similar to that of (5). This analysis indicates that
Fig. 2. Structure of a FLANN.
the functional expansion model always yields a flat net solutionif a sufficient number of additional functions is used in the ex-pansion.
Fig. 2 represents a simple FLANN structure, which is essen-tially a flat net with no hidden layer. In FLANN, inputs arefed to the functional expansion block to generate functionallyexpanded signals which are linearly combined with the -ele-ment weight vector to generate a single output. In this paper, thetrigonometric functional expansion is chosen for the FLANNstructure because of the below-mentioned reason.
A. Basis of Using Trigonometric Functional Expansion
From (8) it may be seen that the condition for existence of aweight solution depends on the existence of inverse of the ma-trix . This is true only if the matrix equation is linearly inde-pendent, and may be achieved by the use of suitable orthogonalpolynomials for the functional expansion. Some representativeexamples are Legendre, Chebyshev, and trigonometric polyno-mials. Of all the polynomials of th order with respect to an or-thogonal system, the best approximation in the metric space isgiven by the th partial sum of its Fourier series with respect tothe system. Therefore, the trigonometric polynomial basis func-tions given by
provide a compact representation of the function in the meansquare sense. If is the order of functional expansion, then
, where and are the lengths of the inputvector and the functionally enhanced vector . Here repre-sents a column vector of the matrix .
III. TRIGONOMETRIC FUNCTIONAL
EXPANSION-BASED ANC SYSTEM
The FLANN employing trigonometric functional expansionwith finite memory and a finite order can be described bythe following input-output relationship.
(9)
where
(10)

316 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004
and stands for functional expansion. In vector form, (9)is represented as
(11)
where
(12)
(13)
and denotes transpose of a matrix.In general, we may describe the signal elements of as
(14)
where . Denoting as a vector of elements atinstant , we can write
(15)
Equation (12) can be rewritten in terms of as
(16)
A. Filtered-s LMS (FSLMS) Algorithm
In the derivation of the FSLMS algorithm, the -elementtransformed vector has been used instead of the -elementinput signal vector . Referring to Fig. 3, we have
The transfer function of the primary path from thereference microphone to the error microphone.The primary noise signal at the cancellation pointThe residual noise sensed by the error microphone,which is expressed as
(17)
where is the impulse response of the secondarypath transfer function and denotes convolu-tion operation.
The estimate of the secondary path, which is presentwithin the Filtering block of Fig. 3. An expandedversion of the filtering block is shown in Fig. 4.The filtered vector whose each signal element is ob-tained by filtering the corresponding signal elementsof with the secondary path estimate .
Hence (17) can be rewritten as
(18)
Fig. 3. Block diagram of ANC with FSLMS algorithm.
In the -domain, (18) is expressed as
(19)
where , and are the -transformsof the residual noise , desired noise to be cancelled ,secondary path impulse response , weight vector , andthe functionally enhanced signal element vector , respec-tively. Let the FLANN output be
(20)
where the functionally enhanced input vector and the cor-responding adaptive coefficient (weight) vector at timeindex are defined as and
. In the -domain, (20) is expressedas
(21)
The length of and are both equal to, where is the number of the memory elements and is the
order of the functional expansion. The special case of isa simple FIR filter, being and .
To derive the FSLMS algorithm we rewrite (17) as
(22)
Let us define the cost function as the residual noise power, i.e.,
(23)
The weight vector can be adjusted [17] according to thefollowing update equation which minimizes the mean squareerror
(24)
where is an instantaneous estimate of the gradient ofwith respect to the weight vector . Now
(25)

DAS AND PANDA: ACTIVE MITIGATION OF NONLINEAR NOISE PROCESSES USING A NOVEL FILTERED-s LMS ALGORITHM 317
Fig. 4. Expansion of the Filtering block (a) for normal FSLMS algorithm (b) for fast FSLMS algorithm.
Substituting the values of in (24) we get
(26)
where denotes the step-size, which controls the convergencespeed of the FSLMS algorithm.
In a practical ANC system, is used as an estimate ofand is obtained by linear modeling techniques [17]. Thus,may be replaced by in (26) to get
(27)where
(28)
Equation (28) indicates that the signal vector is obtainedby filtering the signal elements of with the filter of impulseresponse element .
B. Computational Complexity
For memory elements and th-order functional expansion,let us calculate the computational load of the FLANN basedFSLMS algorithm. Assuming as the number of taps of theestimated secondary path transfer function, the computationalcomplexity per iteration of the FSLMS algorithm is computedas follows.
i) For calculating the output of the FLANN,Number of multiplicationsNumber of additionsNumber of
ii) For calculating , the filtered signal elements ofNumber of multiplicationsNumber of additions
iii) For updating weightsNumber of multiplicationsNumber of additions
iv) Total computational loadTotal number of
Total number ofNumber of
C. Fast FSLMS Algorithm
In the FSLMS algorithm the output of the filtering blockof Fig. 3 is obtained by convolving the functionally enhancedsignal vector with the coefficients of . To estimate thecomputational involvement of the filtering block, the same hasbeen expanded and shown in Fig. 4(a). Referring to this figureand assuming first-order functional expansion, i.e., , wecan expand the vector element-wise using (16) as
(29)
Filtering each element of through we get
(30)

318 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004
TABLE IICOMPARISON OF COMPUTATIONAL COMPLEXITY PER SAMPLE BETWEEN SECOND-ORDER VFXLMS ALGORITHM
AND FIRST-ORDER FSLMS ALGORITHM WITH MEMORY SIZE N = 10
From (29) and (30) it is clear that
(31)
Equation (31) indicates that can be com-puted using , and . In fact, the higher terms are ob-tained by suitably delaying the terms and . Hence byemploying a shift register, subsequent elements of can beobtained and thus the computational load can be substantiallyreduced. The corresponding new scheme to obtain all elementsof is shown in Fig. 4(b). The new computational involve-ment in computing is estimated as follows:
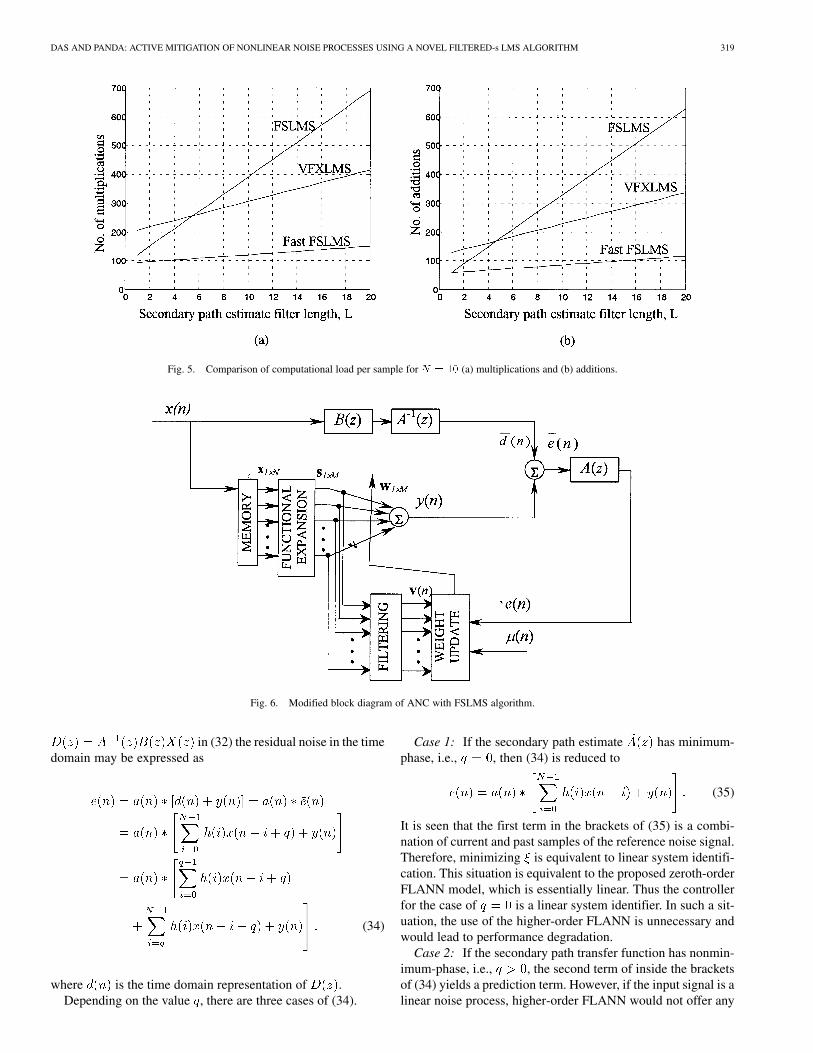
Computer simulations in Section V reveal that a second-orderVFXLMS algorithm performs equivalently to that of a first-order FSLMS algorithm. Keeping this in view, the computa-tional load involved in each case has been evaluated and is listedin Table II for memory size. The same table also
presents the computational requirement of the fast FSLMS al-gorithm. The number of multiplications and additions requiredin each of the VFXLMS, FSLMS, and fast FSLMS algorithmis separately computed using Table II and is plotted in Fig. 5as a function of . From Table II as well as from Fig. 5 it isevident that the proposed FSLMS algorithm is computationallysuperior to VFXLMS algorithm up to . However, asincreases beyond 5 the number of multiplications and additionsof the FSLMS algorithm increases approximately three timesfaster with compared to the VFXLMS algorithm. It is also in-teresting to observe from Fig. 5 that the fast FSLMS algorithmrequires substantially fewer multiplications and additions com-pared to those of the FSLMS and VFXLMS algorithms.
IV. NONMINIMUM-PHASE SECONDARY PATH TRANSFER
FUNCTION
The following analysis investigates the feasibility of theFSLMS algorithm in the situation where the secondary pathtransfer function is nonminimum-phase, while the referencenoise is a nonlinear noise process. The objective is to illustratethat if a nonlinear reference noise process is to be controlledwith a nonminimum-phase secondary path estimate, theFSLMS algorithm will achieve better performance than usingthe conventional FXLMS algorithm. Referring to Fig. 3, wecan rewrite the error function in the -domain as
(32)
A block diagram of (32) is shown in Fig. 6. When is non-minimum-phase, the may be approximated as[7], where is a causal approximation to the inverse of thesecondary path and is a positive integer. Substituting theapproximate value of in (32) we get
(33)
We assume that , where is aset of FIR filter coefficients. Referring to Fig. 6, and substituting
DAS AND PANDA: ACTIVE MITIGATION OF NONLINEAR NOISE PROCESSES USING A NOVEL FILTERED-s LMS ALGORITHM 319
Fig. 5. Comparison of computational load per sample for N = 10 (a) multiplications and (b) additions.
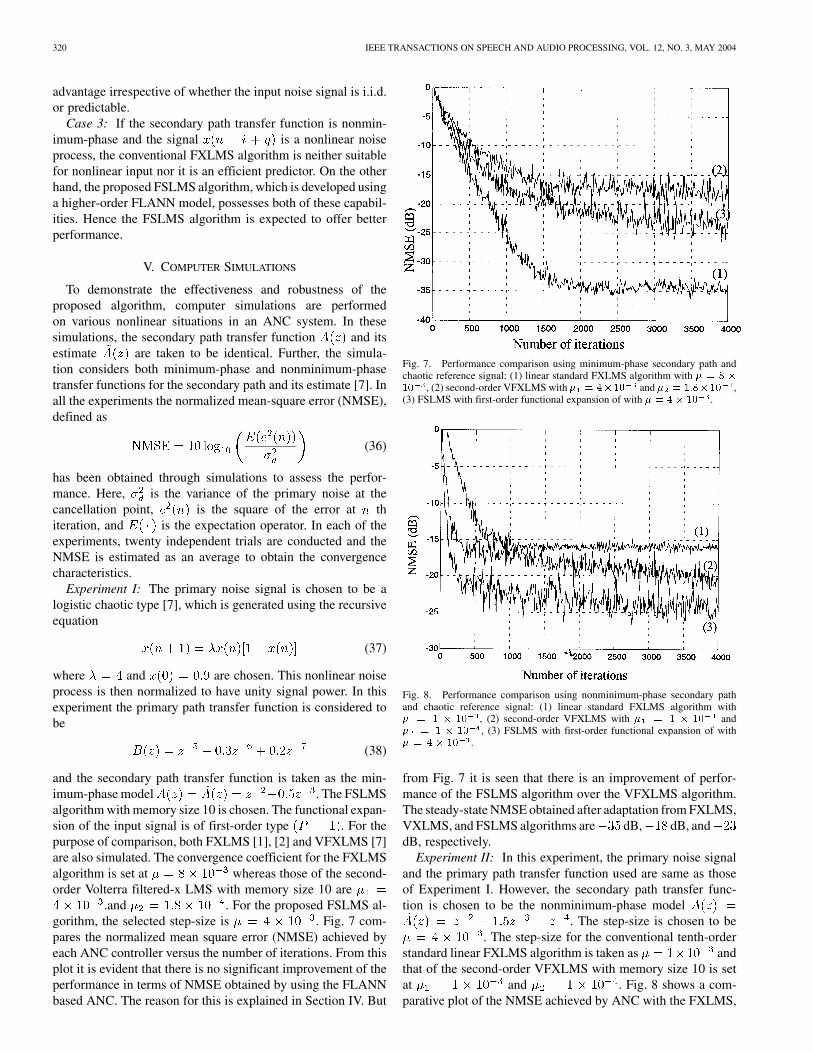
Fig. 6. Modified block diagram of ANC with FSLMS algorithm.
in (32) the residual noise in the timedomain may be expressed as
(34)
where is the time domain representation of .Depending on the value , there are three cases of (34).
Case 1: If the secondary path estimate has minimum-phase, i.e., , then (34) is reduced to
(35)
It is seen that the first term in the brackets of (35) is a combi-nation of current and past samples of the reference noise signal.Therefore, minimizing is equivalent to linear system identifi-cation. This situation is equivalent to the proposed zeroth-orderFLANN model, which is essentially linear. Thus the controllerfor the case of is a linear system identifier. In such a sit-uation, the use of the higher-order FLANN is unnecessary andwould lead to performance degradation.
Case 2: If the secondary path transfer function has nonmin-imum-phase, i.e., , the second term of inside the bracketsof (34) yields a prediction term. However, if the input signal is alinear noise process, higher-order FLANN would not offer any
320 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004
advantage irrespective of whether the input noise signal is i.i.d.or predictable.
Case 3: If the secondary path transfer function is nonmin-imum-phase and the signal is a nonlinear noiseprocess, the conventional FXLMS algorithm is neither suitablefor nonlinear input nor it is an efficient predictor. On the otherhand, the proposed FSLMS algorithm, which is developed usinga higher-order FLANN model, possesses both of these capabil-ities. Hence the FSLMS algorithm is expected to offer betterperformance.
V. COMPUTER SIMULATIONS
To demonstrate the effectiveness and robustness of theproposed algorithm, computer simulations are performedon various nonlinear situations in an ANC system. In thesesimulations, the secondary path transfer function and itsestimate are taken to be identical. Further, the simula-tion considers both minimum-phase and nonminimum-phasetransfer functions for the secondary path and its estimate [7]. Inall the experiments the normalized mean-square error (NMSE),defined as
(36)
has been obtained through simulations to assess the perfor-mance. Here, is the variance of the primary noise at thecancellation point, is the square of the error at thiteration, and is the expectation operator. In each of theexperiments, twenty independent trials are conducted and theNMSE is estimated as an average to obtain the convergencecharacteristics.
Experiment I: The primary noise signal is chosen to be alogistic chaotic type [7], which is generated using the recursiveequation
(37)
where and are chosen. This nonlinear noiseprocess is then normalized to have unity signal power. In thisexperiment the primary path transfer function is considered tobe
(38)
and the secondary path transfer function is taken as the min-imum-phase model . The FSLMSalgorithm with memory size 10 is chosen. The functional expan-sion of the input signal is of first-order type . For thepurpose of comparison, both FXLMS [1], [2] and VFXLMS [7]are also simulated. The convergence coefficient for the FXLMSalgorithm is set at whereas those of the second-order Volterra filtered-x LMS with memory size 10 are
.and . For the proposed FSLMS al-gorithm, the selected step-size is . Fig. 7 com-pares the normalized mean square error (NMSE) achieved byeach ANC controller versus the number of iterations. From thisplot it is evident that there is no significant improvement of theperformance in terms of NMSE obtained by using the FLANNbased ANC. The reason for this is explained in Section IV. But
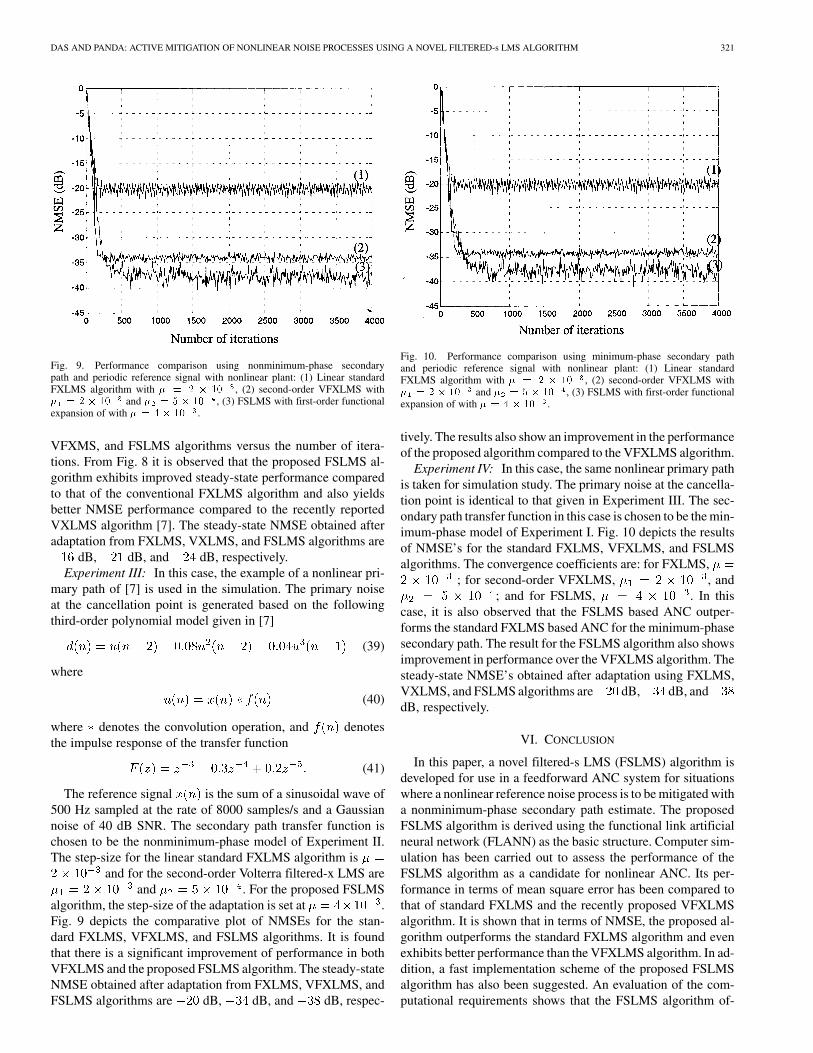
Fig. 7. Performance comparison using minimum-phase secondary path andchaotic reference signal: (1) linear standard FXLMS algorithm with � = 8 �
10 , (2) second-order VFXLMS with � = 4�10 and � = 1:8�10 ,(3) FSLMS with first-order functional expansion of with � = 4� 10 .
Fig. 8. Performance comparison using nonminimum-phase secondary pathand chaotic reference signal: (1) linear standard FXLMS algorithm with� = 1 � 10 , (2) second-order VFXLMS with � = 1 � 10 and� = 1 � 10 , (3) FSLMS with first-order functional expansion of with� = 4 � 10 .
from Fig. 7 it is seen that there is an improvement of perfor-mance of the FSLMS algorithm over the VFXLMS algorithm.The steady-state NMSE obtained after adaptation from FXLMS,VXLMS, and FSLMS algorithms are dB, dB, anddB, respectively.
Experiment II: In this experiment, the primary noise signaland the primary path transfer function used are same as thoseof Experiment I. However, the secondary path transfer func-tion is chosen to be the nonminimum-phase model
. The step-size is chosen to be. The step-size for the conventional tenth-order
standard linear FXLMS algorithm is taken as andthat of the second-order VFXLMS with memory size 10 is setat and . Fig. 8 shows a com-parative plot of the NMSE achieved by ANC with the FXLMS,
DAS AND PANDA: ACTIVE MITIGATION OF NONLINEAR NOISE PROCESSES USING A NOVEL FILTERED-s LMS ALGORITHM 321
Fig. 9. Performance comparison using nonminimum-phase secondarypath and periodic reference signal with nonlinear plant: (1) Linear standardFXLMS algorithm with � = 2 � 10 , (2) second-order VFXLMS with� = 2� 10 and � = 5 � 10 , (3) FSLMS with first-order functionalexpansion of with � = 4 � 10 .
VFXMS, and FSLMS algorithms versus the number of itera-tions. From Fig. 8 it is observed that the proposed FSLMS al-gorithm exhibits improved steady-state performance comparedto that of the conventional FXLMS algorithm and also yieldsbetter NMSE performance compared to the recently reportedVXLMS algorithm [7]. The steady-state NMSE obtained afteradaptation from FXLMS, VXLMS, and FSLMS algorithms are
dB, dB, and dB, respectively.Experiment III: In this case, the example of a nonlinear pri-
mary path of [7] is used in the simulation. The primary noiseat the cancellation point is generated based on the followingthird-order polynomial model given in [7]
(39)
where
(40)
where denotes the convolution operation, and denotesthe impulse response of the transfer function
(41)
The reference signal is the sum of a sinusoidal wave of500 Hz sampled at the rate of 8000 samples/s and a Gaussiannoise of 40 dB SNR. The secondary path transfer function ischosen to be the nonminimum-phase model of Experiment II.The step-size for the linear standard FXLMS algorithm is
and for the second-order Volterra filtered-x LMS areand . For the proposed FSLMS
algorithm, the step-size of the adaptation is set at .Fig. 9 depicts the comparative plot of NMSEs for the stan-dard FXLMS, VFXLMS, and FSLMS algorithms. It is foundthat there is a significant improvement of performance in bothVFXLMS and the proposed FSLMS algorithm. The steady-stateNMSE obtained after adaptation from FXLMS, VFXLMS, andFSLMS algorithms are dB, dB, and dB, respec-
Fig. 10. Performance comparison using minimum-phase secondary pathand periodic reference signal with nonlinear plant: (1) Linear standardFXLMS algorithm with � = 2 � 10 , (2) second-order VFXLMS with� = 2 � 10 and � = 5 � 10 , (3) FSLMS with first-order functionalexpansion of with � = 4 � 10 .
tively. The results also show an improvement in the performanceof the proposed algorithm compared to the VFXLMS algorithm.
Experiment IV: In this case, the same nonlinear primary pathis taken for simulation study. The primary noise at the cancella-tion point is identical to that given in Experiment III. The sec-ondary path transfer function in this case is chosen to be the min-imum-phase model of Experiment I. Fig. 10 depicts the resultsof NMSE’s for the standard FXLMS, VFXLMS, and FSLMSalgorithms. The convergence coefficients are: for FXLMS,
; for second-order VFXLMS, , and; and for FSLMS, . In this
case, it is also observed that the FSLMS based ANC outper-forms the standard FXLMS based ANC for the minimum-phasesecondary path. The result for the FSLMS algorithm also showsimprovement in performance over the VFXLMS algorithm. Thesteady-state NMSE’s obtained after adaptation using FXLMS,VXLMS, and FSLMS algorithms are dB, dB, anddB, respectively.
VI. CONCLUSION
In this paper, a novel filtered-s LMS (FSLMS) algorithm isdeveloped for use in a feedforward ANC system for situationswhere a nonlinear reference noise process is to be mitigated witha nonminimum-phase secondary path estimate. The proposedFSLMS algorithm is derived using the functional link artificialneural network (FLANN) as the basic structure. Computer sim-ulation has been carried out to assess the performance of theFSLMS algorithm as a candidate for nonlinear ANC. Its per-formance in terms of mean square error has been compared tothat of standard FXLMS and the recently proposed VFXLMSalgorithm. It is shown that in terms of NMSE, the proposed al-gorithm outperforms the standard FXLMS algorithm and evenexhibits better performance than the VFXLMS algorithm. In ad-dition, a fast implementation scheme of the proposed FSLMSalgorithm has also been suggested. An evaluation of the com-putational requirements shows that the FSLMS algorithm of-

322 IEEE TRANSACTIONS ON SPEECH AND AUDIO PROCESSING, VOL. 12, NO. 3, MAY 2004
fers a computational advantage over VFXLMS algorithm up toa secondary path filter length of 5. However, the fast imple-mentation of the FSLMS algorithm substantially reduces thenumber of operations compared to that of the FSLMS as well asthe VFXLMS algorithm. Thus the proposed fast FSLMS basednonlinear ANC is superior to other reported algorithms both interms of steady-state mean square error and computational com-plexity.
REFERENCES
[1] S. M. Kuo and D. R. Morgan, Active Noise Control Systems—Algorithmsand DSP Implementations. New York: Wiley, 1996.
[2] P. A. Nelson and S. J. Elliot, Active Control of Sound. New York: Aca-demic, 1992.
[3] Process of Silencing Sound Oscillations, P. Lueg, June 1936, U.S. Patent2 043 416.
[4] P. Strauch and B. Mulgrew, “Active control of non linear noise processesin a linear duct,” IEEE Trans. Signal Processing, vol. 46, pp. 2404–2412,Sept. 1998.
[5] H. K. Pelton, S. Wise, and W. S. Sims, “Active HVAC noise controlsystem provide acoustical comfort,” Sound Vibr., vol. 28, pp. 14–18, July1994.
[6] A. J. Salloway and C. E. Millar, “Active vibration and noise control,”GEC Rev., vol. 11, no. 3, pp. 138–145, 1996.
[7] L. Tan and J. Jiang, “Adaptive Volterra filter for active control of non-linear noise processes,” IEEE Trans. Signal Processing, vol. 49, pp.1667–1676, Aug. 2001.
[8] P. R. Chang, C. G. Lin, and B. F. Yeh, “Inverse filtering of a loudspeakerand room acoustics using time delay neural networks,” J. Acoust. Soc.Amer., vol. 95, pp. 3400–3408, June 1994.
[9] T. Matsuura, T. Hiei, H. Itoh, and K. Torikoshi, “Active noise controlby using prediction of time series data with a neural network,” in Proc.IEEE SMC Conf., vol. 3, 1995, pp. 2070–2075.
[10] Active Attenuation of Nonlinear Sound, W. Klippel, Dec. 21, 1999, U.S.Patent 6005952.
[11] M. Bouchard, B. Paillard, and C. T. L. Dinh, “Improved training ofneural networks for the nonlinear active noise control of sound and vibra-tion,” IEEE Trans. Neural Networks, vol. 10, pp. 391–401, Mar. 1999.
[12] S. D. Snyder, “Active control of vibration using a neural network,” IEEETrans. Neural Networks, vol. 6, pp. 819–828, July 1995.
[13] J. C. Patra, R. N. Pal, B. N. Chatterji, and G. Panda, “Identificationof nonlinear dynamic system using functional link artificial neural net-works,” IEEE Trans. Syst., Man, Cybern. B, vol. 29, pp. 254–262, Apr.1999.
[14] Y. Pao, Adaptive Pattern Recognition and Neural Networks. Reading,MA: Addison Wesley, 1989.
[15] N. Sadegh, “A perceptron network for functional identification and con-trol of nonlinear systems,” IEEE Trans. Neural Networks, vol. 4, pp.982–988, Nov. 1993.
[16] D. Rumelhart, G. Hinton, and R. Williams, “Learning internal represen-tations by error propagation,” in Parallel Distributed Processing: Explo-ration in Microstructure of Cognition. Cambridge, MA: MIT Press,1986, vol. 1, ch. 8, pp. 318–362.
[17] B. Widrow and S. D. Stearns, Adaptive Signal Processing. EnglewoodCliffs, NJ: Prentice-Hall, 1985.
Debi Prasad Das received the B.Sc. degree inphysics from Utkal University and the M.Sc. degreein electronics from Sambalpur University in 1996and 1998, respectively. He is currently pursuingthe Ph.D. degree at the National Institute of Tech-nology, Rourkela, India. His Ph.D. topic is “ActiveNoise Control using DSP and Soft ComputingTechniques.”
While at National Institute of Technology,Rourkela, he was working as a Research Assistantin the VLSI design project, which was sponsored by
the Ministry of Information Technology, Government of India. He is currentlyworking as an Assistant Professor and Head of the Department of Electronics,Silicon Institute of Technology, Bhubaneswar, India.
His research interests are adaptive linear and nonlinear signal processing, ac-tive noise control, DSP, soft computing, VLSI design, and development of em-bedded systems using microcontroller and FPGA.
Ganapati Panda (M’94–SM’97) received B.Sc.degree in electrical engineering in 1971 and theM.Sc. Engg. degree in communication systems in1977 from Sambalpur University. He received thePh.D. degree in digital signal processing from theIndian Institute of Technology, Kharagpur, in 1982.During 1984–1986, he was a Postdoctoral Fellowat the University of Edinburgh, Edinburgh, U.K.,under the Common Wealth fellowship program,specializing in adaptive signal processing.
He served as a Lecturer from 1972 to 1979 and asa Reader from 1979 to 1988 at the University College of Engineering, Burla,India. He then joined as a Professor and Head in the Applied Electronics and In-strumentation Engineering Department of National Institute of Technology (for-merly REC), Rourkela, Orissa, India, in 1988. On academic assignment he hasvisited USA, UK, France, Japan, and Singapore. He has successfully completed20 research and developmental projects sponsored by different organizations.He has already guided 12 Ph.D. students and published more than 158 papersin referred journals and conferences. He has edited two books. He is a memberof AICTE expert team, sectional committee of INAE and National Board ofAccreditation. He is a regular reviewer of research papers of many internationaljournals. His research interests are in the field of digital signal processing, digitalcommunication, soft computing, intelligent instrumentation, and power system.
Dr. Panda received the prestigious Samanta Chandra Sekhar Award from thwDepartment of Science and Technology, Government of Orissa in 1993 for out-standing contribution to engineering and technology. He has received many goldmedals as best paper award. In 2000 he was nominated as a Fellow of NationalAcademy of Engineers (FNAE) for significant contribution to soft computingand DSP applications to telecommunication engineering. In addition, he is aFellow of Institute of Engineers, and IETE, India, and a Life Member of CSIand ISTE.
Copyright © 2022 FDOKUMEN