
نظرية المورفو فى تصميم جداريات زجاجية معاصرة تفعيل - مجلة ...
Upload
khangminh22Category
view
0download
0
الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة نتاجهندسة اإلقسم
تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي
الميكانيكيةالهندسة في رسالة أعدت لنيل درجة الدكتوراه
إعداد محمــد طيـــــرالمهندس
م 1026 - هـ 1437
الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة اإلنتاجقسم هندسة
تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي
الميكانيكيةالهندسة في رسالة أعدت لنيل درجة الدكتوراه
إعداد
محمــد طيــــرالمهندس
المشرف المشارك المشرف الرئيسي رــــاضل سكـالدكتور ف عالء سيد باكيرالدكتور أستاذ مساعد في قسم الذكاءالصنعي الميكانيك التطبيقي في قسم أستاذ
كلية الهندسة المعلوماتية الميكانيكية كلية الهندسة جامعة حلب جامعة حلب
بالتعاون مع جامعة حلب – كلية الهندسة الميكانيكية –القادر حميضة أ.د.عبد
جامعة حلب – كلية الهندسة الميكانيكية –د.مهند طرشة كردي
م 2016 -ـ ه 1437

الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة نتاجاإلهندسة قسم
لجنة الحكم
المتخذ / 7711/قرار مجلس البحث العلمي والدراسات العليا بجامعة حلب رقم بناء على تم تسمية ،1076 2/7/المنعقدة بتاريخ 1075/1076للعام الدراسي /71/ بالجلسة رقم
لجنة الحكم على الرسالة مؤلفة من السادة:
الجامعة الكلية القسم الصفة العلمية أسم الدكتور حلب ه. الميكانيكية ميكانيك تطبيقي أستاذ د.عالء سيد باكير
حلب ه. الميكانيكية هندسة اإلنتاج أستاذ د.عبد المنعم جسري حلب ه. الميكانيكية ميكانيك تطبيقي أستاذ د.مفيد موقع
حلب معلوماتيةاله. الذكاء الصنعي أستاذ د.يحيى نجارالكهربائية ه. يةلكترونالهندسة اإل أستاذ مساعد د.عبد اإلله ناولو
واإللكترونية حلب
جامعة حلب -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -د طيرـم. محم
الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة اإلنتاجقسم هندسة
تصريح
لتيد ممد مرمم ر تصممم و نتيذ ممظ ةيتممم تيةممو ظة مم )نعنررنثاأأصرر بأنررذاأاررحثأث ن رر أقررديأ ة بررةحأ ل صررن أنالأاررنأ أأ،ديأأليأشرردةد رريأبقررن أأاأ رر( لليمم و لرنتممن صممي أعلىأأيأشدةد أأخ ى.
أ
رشح لم أ ردأطي ي.أ أ
جامعة حلب -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -د طيرـم. محم
الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة نتاجهندسة اإلقسم
شهادة
أنشهه بأنههلعأل الههصأل لي ههي ألههاأةههو أل جةههح أةههيأنم بهه أن هه أ لههاأ ههح أنهه هه سأةهه بأأم ههإأرشههجل أل ههبلميجأل لهههبأر ههججشههلأ ن ههصأشهه حبتأل ههبلميجل أل ل نههب أل ل أ
لاأل يه أل نبةه أأل ليلحنيكأل مربيقا ة أةنبة أ)ل لشج أل جئيةا(ألألةمحوألاأنحك جلألةهمحوأأ،أيلشحجل أل بلميجألحضهصأةهلجأ)ل لشهج أل لشهحجك(بحلا أ بل ليلحنيلي أب
يأيأل نبةهه أل لا يلحميهه أببحلاهه أ ههب أألههاأل يهه ل لةههح بألههاأ ةهه أل ههولحسأل ههنااأأجبيعأر ىأن أآخجألاأةولأل ليضيعأليثقأنح نص
أأ أ2/3/2102 بأ
أأ
أالمشرف الرئيسي المشارك المشرفأأأأأأأأأأأأأرشحالم أ سأة بأنحك جل بلميجأأأأأأأأأأل بلميجألحضصأةلجأأأأأأأأأأأأل لهبأر ج أأ

حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير
الجمهورية العربية السورية جـامعــة حـلـب
الميكانيكيةكلية الهندسة اإلنتاج قسم هندسة
األبحاث العلمية األبحاث التالية:رشح لنيل درجة الدكتوراه بنشر الم محمـد طيرقام الباحث
وهــــو /5102/لج ــــام (121)ن شــــر جــــح مججــــة بحــــوث جام ــــة حجــــ بال ــــدد : البحثثثثث األ ب نوان:
مفاصل الر ب ت في الحركة العكسية االستعانة بمعادالت تقاطع دائرتين لحساب بعض ز ايا محاكاتها
Using Equations of Intersection of two Circles to Calculate Some of Robot
Angles in Inverse Kinematics Simulation
وهـــو /5102/لج ـــام (122)ن شـــر جـــح مججـــة بحـــوث جام ـــة حجـــ بال ـــدد : الثثثثانيالبحثثثث ب نوان:
في فضاء ثالثي البعد النمذجة الديناميكية لر ب ت يملك خمس درجات حرية محاكاة حركته Dynamic Modeling of 5-Dof Robot and Simulation of Motion in Three
Dimensional Space
وهـــو /5102/لج ـــام (122)ن شـــر جـــح مججـــة بحـــوث جام ـــة حجـــ بال ـــدد البحثثثث الثالثثثث ب نوان:
اللحام تط ير تقنية القياس بالليزر لضبط المسافة بين المشعل المشغ لة في ر ب تاتDevelopment of Laser Measuring Technique to Adjust the Distance
Between Torch and Workpiece for Welding Robots وهـــو /5102/لج ـــام (126)ن شـــر جـــح مججـــة بحـــوث جام ـــة حجـــ بال ـــدد رابثثثعالبحثثثث ال ب نوان:
ضبط ت ضع المشغ لة في ر ب تات اللحام بإستخدام تقانات الرؤية الحاس بية Adjust Workpiece Position for Welding Robots Using Computer Vision
Techniques
وهــو /5102/لج ــام (127)ن شــر جــح مججــة بحــوث جام ــة حجــ بال ــدد : لخثثامسالبحثثث ا ب نوان:
مسار اللحام لل صلة التراكبية في ر ب تات اللحاماستخدام الليزر الخطي لتحديد Using Linear Laser to Determine Welding path of Lap Joint for Welding
Robots
حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير
حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير
حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير

حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير

حلب جامعة -تصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارات اللحام لروبوت صناعي -م. محمـد طير
جامعة حلب -مسارات اللحام لروبوت صناعي تصميم وتنفيذ أنظمة تحكم ذكية لتحديد -د طيرـم. محم
شكر وتقدير
أشكر كلل . لم يكن لهذا العمل أن يتحقق لوال تشجيع ومساعدة السادة المشرفينفي مختلف المراحل وأخص بالذكر األسلتاذ اللدكتور علسي سليد وساعدني من شجعني
بللارير والللدكتور فاكللل سللكر. كمللا أتوجللت بالشللكر لعسللتاذ الللدكتور ع للدالقادر حميكلل والدكتور مهند طرش كردي.
أتوجللللت بالشللللكر الجاذللللل لعسللللتاذ الللللدكتور ن هللللان خياطلللل عميللللد كليلللل الهندسلللل علمي.الميكانيكي على دعمت لمسيرة البحث ال
كملللا أتوجلللت بالشلللكر الخلللالص لللللدكتور فلللايا نجلللار نا للل عميلللد الرليللل للشللل ون العلمي على الجهد الذي ي ذلت في س يل دعم البحث العلمي في الرلي .
كملللا أشلللكر جميلللع اللللدكاترس فلللي جسلللم ندسللل اسنتلللا وأخلللص بالشلللكر األسلللتاذ إظهار أصال ذا العمل.الدكتور ع د المنعم جسري على جهدس الذي ذلت في س يل
كملللا ال ينلللوتني أن أشلللكر األسلللتاذ اللللدكتور منيلللد موجلللع واألسلللتاذ اللللدكتور يحيلللى نجار والدكتور ع د اسلت ناولو.
محمـد طير المهندس

1
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
فهرس المحتويات الموضــــــــــــــــــــــوع رقم الصفحة
1..........................................................................فهرس المحتويات 6...........................................................................فهرس األشكال
41فهرس الجداول ........................................................................... 45الرموز والمصطلحات ....................................................................
41.................................................................................الملخص 41...................................................................................مقدمة
32.............................................. الفصل األول : مقدمة عامة عن الروبوتات 31...................مقدمة .........................................................-4-4 31................... .مزايا استخدام الروبوتات ......................................-4-3 35......................................................... يةاألنظمة الروبوت أصناف-4-2 35...................................... تصنيف الروبوتات حسب السلسلة الحركية-4-2-4 35..........................................للشكل الهندسي وفقا الروبوتات تصنيف-4-2-3 36.............................................لنظام عملهاالروبوتات وفقا تصنيف-4-2-2 31....................................الروبوتات وفقا للمهام المطلوبة منها تصنيف -4-2-1 32...........................................لطريقة عملها ا ف الروبوتات وفقيصنت -4-2-5 32.....................................................................نية الروبوتاتب-4-1 31...................................................................أجيال الروبوتات-4-5 31...................................................تالءم الروبوت مع عمليات اللحام-4-6 23.............................................................مراحل اللحام بالروبوت-4-1 23...........................الخالصة...............................................-4-2
24............................................................الفصل الثاني: البحث المكتبي 23............................................................................مقدمة -3-4 23..................................................الروبوتاتنشأة لمحة تاريخية عن -3-3 21......................................... مراحل تطور صناعة الروبوتات التسلسلية -3-2

2
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
21..................................حصائيات في مجال صناعة واستخدام الروبوتاتإ -3-1 14..........................ابتكارات الدول العربية في مجال صناعة الروبوتات الذكية -3-5 12......................................................لمحة تاريخية عن نشأة اللحام -3-6 15................................................اللحام أتمتة عمليةلمحة تاريخية عن -3-1 11.......................دراسة مرجعية في مجال السلوك الحركي للروبوتات التسلسلية -3-2 52..................روبوتات بتقنيات الرؤية الحاسوبيةدراسة مرجعية في مجال تزويد ال -3-1 61...........دراسة مرجعية في مجال تزويد روبوتات اللحام بتقنيات الرؤية الحاسوبية -3-43 13الخالصة........................................................................ -3-44
14..................................................للروبوت الفصل الثالث: الدراسة الحركية 13............................................................................مقدمة -2-4 12............................................................الروبوت المدروسبنية -2-3 11...............................المتجانسة المصفوفاتباستخدام اإلحداثيةالتحويالت -2-2 Denavit – Hartenberg.................................................12 قاعدة -2-1 23...........................................................ماميةالمسألة الحركية األ -2-5 23.................................................الرياضي للروبوت النموذجء بنا -2-5-4 22توجيه المؤثر النهائي........................................................... -2-5-3 25............................................تخطيط المسار.................... -2-5-2 21...........................................................المسألة الحركية العكسية -2-6 21....................................................حساب زوايا مفاصل الروبوت 2-6-4 11....إيجاد مصفوفة جاكوبيان....................................................... -2-1 433.........................................................................المحاكاة -2-2 431.........................................................................الخالصة 2-1
432..............................................الفصل الرابع: الدراسة الديناميكية للروبوت 431...........................................................................مقدمة -1-4 431.................................................الديناميكي للروبوت النموذجبناء -1-3 441..................................................المحاكاة إجراء الحسابات وتنفيذ -1-2

3
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
442........................................................................الخالصة -1-1 441..........................................الفصل الخامس: منهجية تنفيذ روبوت صناعي
433.........................................................................المقدمة -5-4 434.....................................................للروبوت التصميم الميكانيكي -5-3 434أطوال أذرع الروبوت.......................................................... -5-3-4 433ذرع...........................................................مجال دوران األ -5-3-3 435استنتاج فراغ عمل الروبوت................................................... -5-3-2 432.................................................................لروبوتاتصنيع -5-2 432...............................................................الروبوتهيكل -5-2-4 432...................................................................شغالتالم -5-2-3 431..................................................مزايا المحركات الخطوية -5-2-3-4 423.............................................حركات الخطويةمدأ عمل المب -5-2-3-3 424.......................................تحديد مواصفات المحركات الخطوية -5-2-3-2 423.................................................................علبة السرعة -5-2-2 422...................................................................الحساسات -5-2-1 422.........................................................الحساس الضوئي -5-2-1-4 425................................ألية تحديد الموضع الصفري ألذرع الروبوت -5-2-1-3 426.............................................................ري المتحكم الصغ -5-2-5 421.............................................(ATMEL)متحكمات شركة -5-2-5-4 421أدوات االتصال...............................................................-5-2-6 413والقيادة.........................................................دارات التحكم -5-2-1 413دارة الربط بين المتحكم والحاسب............................................-5-2-1-4 414دارة قيادة المحرك الخطوي................................................ -5-2-1-3 413تحكم بالروبوت......................................................دارة ال -5-2-1-2 413دارة التغذية............................................................... -5-2-1-1 412االختبارات العملية والنتائج....................................................... -5-1
4
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
411الخالصة.........................................................................-5-5 411........تحديد وضبط مسارات اللحام باستخدام تقانات الرؤية الحاسوبية الفصل السادس:
412...........................................................................مقدمة -6-4 412.........................................................متطلبات منظومة الرؤية -6-3 412..........................................................مكونات منظومة الرؤية -6-2 411...............................................................الكاميرا الرقمية -6-2-4 454....................................................منطقة العملنظام إضاءة -6-2-3 454.........................................................وحدة معالجة الصورة -6-2-2 453..................................................طرق تمثيل الصور في الحاسب -6-1 453........................................................لوانباأل الصورة تمثيل -6-1-4 452................................................بالتدرج الرمادي الصورة تمثيل -6-1-3 451...............................................................الصورة الثنائية -6-1-2 451.........................................................المعالجة الرقمية للصورة -6-5 455.................................................الرقميةالصورة معالجة مراحل-6-5-4 452...........................................مسارات اللحام.................ضبط -6-6 451.........................................................اللحام اتتحديد مسار 1--6-6 464.......................ة......المقترح تحديد مسار اللحام متطلبات منظومة 1--6-6-4 463......................................المقترحة لتحديد مسار اللحام..لية اآل 2--6-6-1 413.........................معايرة المنظومة................................. -6-6-4-2 413.................................................االختبارات العملية والنتائج -6-6-4-1 412..........................تحديد مسارات اللحام المنحنية................... -6-6-4-5 415...............دليل مسار اللحام.......................................... -6-6-4-6 423....................................ضبط المسافة بين مشعل اللحام والمشغولة -6-6-3 423...........................................المقترحة القياس تصميم منظومة -6-6-3-4 421........................................المقترحة القياس عمل منظومة آلية -6-6-3-3 413.................................................االختبارات العملية والنتائج -6-6-3-2
5
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
413.......................المراد لحامها................... ضبط توضع المشغولة -6-6-2 414.........................المقترحةمنظومة ضبط توضع المشغولة آلية عمل -6-6-2-4 333.................................................االختبارات العملية والنتائج -6-6-2-3 332................ربط منظومة الرؤية بالروبوت.................................... -6-1 331........................................................................الخالصة -6-2
336.................................................................................الخاتمة 332..........................................................................آفاق مستقبلية
331.................................................................................المراجع 345............................................................................(A) الملحق
313........................................................مخططات ميكانيكية (B)الملحق

6
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ألشكالفهرس ا رقم الصفحة ـــــــكـل ـــــــــالشـــــــ 35............................................أنواع السالسل الحركية للروبوتات (1-1)الشكل 36....................................وفراغ عملها األشكال الهندسية للروبوتات (1-2) الشكل 32..................................................كل العام لبنية الروبوتالش (1-3) الشكل 22................................أول روبوت صناعي....................... (4-3)الشكل 21...............................................أول روبوت صناعي تسلسلي (3-3)الشكل 25.......................................................أول روبوت اسطواني (2-3)الشكل 25...........................................أول روبوت إلنجاز اللحام النقطي (4-3)الشكل 25.........................................أول روبوت إلنجاز عمليات الطالء (5-3)الشكل 26....................................أول روبوت إلنجاز مسارات لحام مستمرة (6-3)الشكل Scara.......................................26أول روبوت صناعي من نوع (1-3)الشكل 21....................أول روبوت يملك ست درجات حرية اللتقاط القطع ونقلها (2-3)الشكل 21..........................................أول روبوت عمالق لنقل الحموالت (1-3)الشكل 21.................إلنجاز أعمال التعبئة والتغليف Deltaأول روبوت من نوع (43-3)الشكل 22............................................أول روبوت مزود بدليل ليزري (44-3)الشكل 22.....................................جهاز السلكي لقيادة الروبوت بالكامل (43-3)الشكل 21......................أخف روبوت تسلسلي في العالم مصنوع من األلمنيوم (42-3)الشكل 21.............................................تطبيقات الروبوتات في العالم (41-3)الشكل 13..........................................نمو مبيعات الروبوتات في العالم (45-3)الشكل 13..........................3341توقعات نمو مبيعات الروبوتات حتى عام (46-3)الشكل 13.................................................توزع الروبوتات في العالم (41-3)الشكل 14...........................................أكثر الدول استخداما للروبوتات (42-3)الشكل 15..............................لة لحام أوتوماتيكية مزودة بعدة مشاعل لحامآ( 41-3)الشكل 11.................................توضع الروبوت بالنسبة لمناول المشغوالت (33-3)الشكل 11....................عمل.......................مخطط صندوقي لمنهجية ال (34-3)الشكل
7
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
12...................................يملك خمس درجات حرية متنقل روبوت (33-3)الشكل RMRC...........................11 مقارنة بين الطريقة المختلطة وطريقة (32-3)الشكل 11.....................................لتنفيذ عمليات اللحام Kukaروبوت (31-3)الشكل 53.......................................توليد مسار المؤثر النهائي للروبوت (35-3)الشكل 53...................................................ربط الروبوت بالحاسب (36-3)الشكل 54.................................. (Lab-Volt R 5150)روبوت تعليمي (31-3)الشكل 53....................................وجود عقبات في منطقة عمل الروبوت (32-3)الشكل 53................فصل فراغ عمل الروبوت إلى منطقتين بسبب تواجد العقبات (31-3)الشكل 52........................................منظومة رؤية مؤلفة من كاميرتين (23-3)الشكل 51...................................تمييز القطع ذات األشكال غير المألوفة (24-3)الشكل 55.........................................تحديد موقع مناسب اللتقاط القطع (23-3)الشكل 55....................................................حساس قياس المسافة (22-3)الشكل 56........................................بمنظومة رؤية متنقل تزويد روبوت (21-3)الشكل 56.........................................مقارنة بين النتائج الفعلية والمقاسة (25-3)الشكل 51.................................................آلية عمل حساس الرؤية (26-3)الشكل 51.......................................................تحليل ظالل القطع (21-3)الشكل 52.......................................فةحساس قياس مسافة منخفض الكل (22-3)الشكل 52.........................................مقارنة بين مسافات مقاسة وفعلية (21-3)الشكل 51..............................روبوت مزود بمنظومة الرؤية مع أداة للتوجيه (13-3)الشكل 51 ................................................محاكاة التقاط قطع ونقلها (14-3)الشكل 63....................................................محاكاة تجنب العقبات (13-3)الشكل 63.........................................محاكاة الحركة على مسار منحني (12-3)الشكل 64.......................................مرتبة بشكل مصفوفي IRحساسات (11-3)الشكل 64.................................................آلية عمل منظومة الرؤية (15-3)الشكل 63..........................................نتائج اختبار المنظومة المصممة (16-3)الشكل 63...............................................روبوت مزود بمنظومة رؤية (11-3)الشكل

8
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
62................................................عادمات األدخنة للسيارات (12-3)الشكل 62..............................................معالجة الصورة لتمييز القطع (11-3)الشكل 62........................تقريب شكل عادمات األدخنة إلى أسطوانات متعددة (53-3)الشكل 62..........................................تثبيت القطع في مكانها الصحيح (54-3)الشكل 61...............................تدريب الروبوت للحام هياكل السفن الضخمة (53-3)الشكل 65....................................كاميرا لتصوير حوض اللحام المنصهر (52-3)الشكل 66.................................................آلية عمل منظومة الرؤية (51-3)الشكل 66.............................دمج منظومة الرؤية مع نظام التحكم بالروبوت (55-3)الشكل 61........................................................شعاع ليزر دائري (56-3) الشكل 62..............................................آلية مراقبة شدة شعاع الليزر (51-3)الشكل IR...........................................62ليدات ومجموعة IRكاميرا (52-3)الشكل 61.................................................آلية عمل منظومة الرؤية (51-3)الشكل 61................................منظومة رؤية لتتبع حركة ذراع عامل اللحام (63-3)الشكل 13................................المخطط الصندوقي للدراسة الحركية للروبوت (4-2) الشكل 12.........................................درجات حرية 5روبوت لحام يملك (3-2) الشكل 11........................ منسوبه لجملة المحاور الشعاع مركبات (2-2) الشكل 15................... لجملة المحاور همنسوب الشعاع مركبات (1-2) الشكل 11.....................................الشكل العام لمصفوفة التحويل الموسعة (5-2) الشكل 11.................................................جملة محاور إحداثية للذراع (6-2) الشكل 24..................................................تمثيل تخطيطي للروبوت (1-2) الشكل Tb............................25انتقال المؤثر النهائي للروبوت مرورا بالنقطة (2-2) الشكل 26........................... مسار المؤثر النهائي )معادلة من الدرجة األولى( (1-2) الشكل 26.................. مسار المؤثر النهائي )معادلة المسار من الدرجة الثانية( (43-2) الشكل 13......................................زاوية المشعل لبعض وصالت اللحام (44-2) الشكل 14..........................الزاوية بين مشعل اللحام والمشغولة المراد لحامها (43-2) الشكل XoY......................................13مسقط الروبوت على المستوي (42-2) الشكل

9
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
12.......................الناتجة عن تقاطع دائرتين ,الحلول المحتملة (41-2) الشكل 12...............................................حاالت عدم تقاطع الدائرتين (45-2) الشكل 15............................. في المستوي و حساب الزاوية (46-2) الشكل 16.............................................. تدوير ونقل شعاع التوجيه (41-2) الشكل 11........................ باالعتماد على الشعاع و حساب الزاوية (42-2) الشكل 433........المخطط الصندوقي لمراحل حل المسألة الحركية األمامية والعكسية (41-2) الشكل 433........................................ةالنافذة األساسية لبرنامج المحاكا (33-2) الشكل 432.............................الخمسة للروبوتالوصالت نافذة تحديد زوايا (34-2) الشكل 431 ...............نافذة حساب مصفوفات التحويل لألزواج الحركية للروبوت (33-2) الشكل Cubic .......105وفق طريقة تخطيط المسار للمفصل األول الميزات الحركية (32-2) الشكل Quantic .....105وفق طريقة تخطيط المسار الميزات الحركية للمفصل األول (31-2) الشكل 436........................................للروبوت المؤثر النهائيإحداثيات (35-2) الشكل 436........................................محاكاة الروبوت في نقطة البداية (36-2) الشكل 436........................................محاكاة الروبوت في نقطة النهاية (31-2) الشكل 431...........................................مسار المؤثر النهائي للروبوت (32-2) الشكل 431..........................للمؤثر النهائي على المسارمحاكاة ثالثية البعد (31-2) الشكل
445.................................المخطط الصندوقي لمراحل عمل البرنامج( 4-1الشكل ) 446..............................الخمسة للروبوتالوصالت نافذة تحديد زوايا (2-4) الشكل 446.........................وفقا للمسار المفترض( محاكاة ثالثية البعد للروبوت 3-1) الشكل 441.................................الوضعية الصفرية ألذرع الروبوت المصمم (1-1) الشكل 117....(Cubic)عزم الدوران الالزم لتدوير األذرع وفقا لتخطيط المسار بطريقة ( 5-1) الشكل 118..(Quantic)عزم الدوران الالزم لتدوير األذرع وفقا لتخطيط المسار بطريقة ( 6-1) الشكل Robot Toolbox.............118عزم الدوران الالزم لتدوير األذرع باستخدام ( 7-1) الشكل
434.............................................لتنفيذ عمليات اللحام روبوت (4-5الشكل ) SolidWorks............122برنامج الـ بروبوت مرسوم التصميم الميكانيكي لل( 3-5الشكل ) 432......................................................أطوال أذرع الروبوت (2-5الشكل )

10
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
432.......................................................دوران الكتفمجال (1-5الشكل ) 431.........................................................الزند مجال دوران( 5-5الشكل ) 431.......................................................الرسغ مجال دوران( 6-5الشكل ) 435.................................................المؤثر النهائيفتل مجال ( 1-5الشكل ) 435.........................................انحناء المؤثر النهائيزاوية مجال (2-5الشكل ) 432.........................................................فراغ العمل الكلي (1-5الشكل ) 432...طرح مجال العمل الذي يحوي النقاط التي ال يصل إليها المؤثر النهائي (43-5الشكل ) 432.............................................فراغ العمل النهائي للروبوت (44-5الشكل ) 431................................................بوت المصنعالرو ( نموذج 43-5الشكل ) 423..........................................المحركات الخطوية المستخدمة( 42-5الشكل ) 424..............................................( مبدأ عمل المحرك الخطوي 41-5الشكل ) 423.................................الحدية لحركة أذرع الروبوت سويا الحالة ( 45-5الشكل ) 422.........................................الدودية المستخدمة ( علبة السرعة46-5الشكل ) 422.................................................... وصلة مرنة )قارنة(( 41-5الشكل ) 421..........................................................ساس ضوئيح (42-5الشكل ) 425........................................................( الطيف الضوئي41-5الشكل ) Thru-Beam............................................425تقنية المسح (33-5الشكل ) 426........................................................( الشعاع المجدي 34-5الشكل ) 421...............................................( آلية تصفير أذرع الروبوت32-5الشكل ) 421................................( Microcontroller)الصغري ( المتحكم 32-5الشكل ) atmega16.......................................421( توزع أقطاب المتحكم 31-5الشكل ) USB.............................................413( وظائف أقطاب منفذ 35-5الشكل ) 414........................................( دارة الربط بين المتحكم والحاسب36-5الشكل ) 412....................................................دارة القيادة عناصر ( 27-5الشكل ) 413..............................................( دارة قيادة المحرك الخطوي 28-5الشكل ) 412......................................................( دارة قيادة الروبوت29-5الشكل )
11
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
411..................................................المستخدمة ( دارة التغذية23-5) الشكل 411........................................المكونات الرئيسية لمنظومة الرؤية (1-6)الشكل 453......................................دور المرشح في التعرف على األلوان (3-6)الشكل USB.................................453من نوع المستخدمة رقميةالكاميرا ال (2-6)الشكل 454......................................................إضاءة منطقة العمل (4-6)الشكل 452...........للمشغولة المراد لحامها (RGB)الصورة الملتقطة بنظام األلوان (5-6)الشكل 452.............الصورة الملتقطة بنظام التدرج الرمادي للمشغولة المراد لحامها (6-6)الشكل 451...................الصورة الملتقطة بالنظام الثنائي للمشغولة المراد لحامها (7-6)الشكل 463.......................( استخدام إشارات التيار لتحديد مركز الوصلة اللحامية8-6)الشكل 463..............................( الفرق بين حزمة ضوء الليزر والضوء العادي9-6)الشكل 462............................................آلية عمل المنظومة المقترحة( 10-6)الشكل 462..........................( توضع الكاميرا والليزر الخطي بالنسبة للمشغولة11-6)الشكل 461...................................( الصورة الملتقطة بنظام التدرج الرمادي12-6)الشكل 461.....................................( تحويل الصورة الملتقطة لنظام ثنائي13-6)الشكل 465................................... (Erosion)( الفلترة بعد تطبيق عملية 14-6)الشكل 465................................... (Dilation)( الفلترة بعد تطبيق عملية 15-6)الشكل closing................466 و openingبعد تطبيق عملتي ثنائية( الصورة ال16-6)الشكل Thin.................................466بعد تطبيق عملية ثنائية( الصورة ال17-6)الشكل 461........................................( تحديد نقطة انكسار شعاع الليزر18-6)الشكل 461.............نقطة انكسار شعاع الليزر موقع( الخوارزمية المصممة لتحديد 19-6)الشكل 462........................الليزر المكتشفه( تشكيل معين محيط بنقطة انكسار 20-6)الشكل 462........................................األولى( نقطة انكسار شعاع الليزر 21-6)الشكل 462........................................( نقطة انكسار شعاع الليزر الثانية22-6)الشكل 461..........................انكسار الليزر المكتشفة( مسار اللحام بين نقطتي 23-6)الشكل 461......................شعاع الليزر إحداثيات( شكل توضيحي آللية استنتاج 24-6)الشكل 414..............متحديد مسار اللحا ( المخطط الصندوقي لمراحل عمل برنامج25-6)الشكل
12
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
413....................... تحديد مسار اللحام منظومة( التجارب المنفذة على 26-6)الشكل 412...........................................الخطأ نسبة( مخطط توضيحي ل27-6)الشكل 412......................................................مسار لحام منحني( 28-6)الشكل 411.............................على طول مسار اللحامتحديد نقاط االنكسار ( 29-6)الشكل 411................................عملية المسح على طول الوصلة اللحامية( 30-6)الشكل 411...........................مسار اللحام الواصل بين جميع نقاط االنكسار( 31-6)الشكل 415...تحديد مسارات اللحام المنحنية عمل برنامج ( المخطط الصندوقي لمراحل32-6)الشكل 416...............................................نقاط انكسار شعاع الليزر( 33-6)الشكل 416..........................تمييز نقطة الليزر في الصورة الملتقطة بالكاميرا( 34-6)الشكل 411............................................................دليل المسار( 35-6)الشكل 411....................................تحديد مسار اللحام األقرب إلى الدليل( 36-6)الشكل 412........رسم دليل المسار بالليزر ( المخطط الصندوقي لمراحل عمل برنامج37-6)الشكل 411.......................تحديد دليل المسار باالعتماد على الطباشيرواجهة ( 38-6)الشكل 411..................................................دليل المسار بالطباشير( 39-6)الشكل 411.....رسم دليل المسار بالطباشير ( المخطط الصندوقي لمراحل عمل برنامج40-6)الشكل 423.من المستغرق إلنبعاث نبضة الليزر.....المسافة باالعتماد على الز قياس ( 41-6)الشكل 424..........................قياس المسافة باالعتماد على قطر بقعة الليزر ( 42-6)الشكل 424............................................................التثليث مبدأ( 43-6)الشكل 422...............توضع الكاميرا بالنسبة لليزر في التصميم المقترح والتقليدي( 44-6)الشكل 425......................................( الصورة الملتقطة بنظام تدرج رمادي45-6)الشكل 425............................................( الصورة الملتقطة بنظام ثنائي46-6)الشكل 426..............................( إطار المستطيل المفيد من الصورة الملتقطة47-6)الشكل 426....................................( شكل توضيحي آللية استنتاج المسافة48-6)الشكل 421.......................الصور الملتقطةالجزء المقتطع من الليزر في قعةب( 49-6)الشكل 422.................حساب المسافة ( المخطط الصندوقي لمراحل عمل برنامج50-6)الشكل 413...........................................( مخطط توضيحي لقيمة الخطأ51-6)الشكل
13
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
RGB...........................................413بنظام ( الصورة الملتقطة52-6)الشكل closing................412 و openingالصورة الثنائية بعد تطبيق عملتي ( 53-6)الشكل 411...........................................صورة ملتقطة بإضاءة ساطعة (54-6)الشكل 411............................................صورة ملتقطة بإضاءة خافتة (55-6)الشكل 415.....................تشكيل القطع الناقص المحتوى ضمن حيز المشغولة( 56-6)الشكل 416......................زوايا المستطيل المحيط بالمشغولة إحداثياتاستنتاج ( 57-6)الشكل 412.....................................تشكيل المستطيل المحيط بالمشغولة( 58-6)الشكل 412......................انزياح المشغولة وزاوية انحرافها في الموضع الجديد( 59-6)الشكل 411...............انحراف المشغولة المخطط الصندوقي لمراحل عمل برنامج( 60-6)الشكل 333................................التجارب المنفذة على المنظومة المصممة( 61-6)الشكل 334.................................................تجارب إزاحة المشغولة ( 62-6)الشكل 333.............مخطط توضيحي لنسبة خطأ االنحراف الزاوي وخطأ االنزياح( 63-6)الشكل 332...........................................ربط الروبوت بمنظومة الرؤية( 64-6)الشكل 332.....................نسب جملة اإلحداثيات بين منظومة الرؤية والروبوت( 65-6)الشكل 331......................فراغ العمل النهائي للروبوت بوجود العائق )الطاولة(( 66-6)الشكل
14
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الجداولفهرس رقم الصفحة ــــدول ــــــــــــــالجـــــــــــ
24.....................................للروبوت لخمسةبارامترات الوصالت ا (4-2) جدولال 441....................................بارامترات األذرع في الموضع الصفري (4-1)الجدول SolidWorks........436برامج ب المستنتجة باالستعانة فراغات العمل الجزئية (4-5) الجدول 423....................................العزم األعظمي الالزم لتدوير كل ذراع( 3-5) الجدول 421............العزم األعظمي الالزم لتدوير كل ذراع بعد تركيب علبة السرعة( 2-5) الجدول 421.........................للمحركات الخطوية المستخدمةالمواصفات التقنية ( 1-5) الجدول
415............( نتائج اختبار دقة حركة المؤثر النهائي للروبوت...............5-5) جدولال 416.................مقارنة بين نتائج اختبار الروبوت ونتائج الباحثين السابقين( 6-5) جدولال
454............................................الكاميرا المستخدمةمواصفات (6-1)الجدول 453.............................................مواصفات الحاسب المستخدم (6-2)الجدول 463.......................................المستخدم الخطي ( مواصفات الليزر6-3الجدول )
413............لمنظومة تحديد مسار اللحام الخطأنسبة والفعلية و المقاسةالقيم (6-4) جدولال 413.................لمنظومة قياس المسافة الخطأ نسبةوالفعلية و المقاسة( القيم 6-5) جدولال 333.منظومة كشف انحراف المشغولة الخطأ الزاوي نسبة والفعلية و المقاسةالقيم (6-6) جدولال 334منظومة انحراف المشغولة....... االنزياحخطأ نسبةوالفعلية و المقاسة( القيم 7-6) جدولال 333.............مقارنة بين نتائج المنظومة المصممة ونتائج الباحثين السابقين( 8-6) جدولال 331............( نتائج اختبار دقة توجيه منظومة الرؤية للمؤثر النهائي للروبوت9-6) جدولال

15
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الرموز والمصطلحات DOF درجات الحرية
GUI واجهة رسوم تفاعلية
Denavit – Hartenberg DH قاعدة
PTP من نقطة إلى نقطة نظام المسار
CP المستمر المسار نظام
deg زاوية دوران المفصل مصفوفة الدوران
مصفوفة التحويل المتجانسة deg زاوية الدوران deg زاوية التراوح deg زاوية الميالن rad زاوية المفصل
rad/sec السرعة الزاوية للمفصل
rad/sec التسارع الزاوي للمفصل2
[ ] مصفوفة الحركة التفاضلية للمؤثر النهائي [ ] مصفوفة جاكوبيان
[ ] مصفوفة الدوران التفاضلي للمفصل m/sec النهائي السرعة الخطية للمؤثر rad/sec السرعة الزاوية للمفصل
تابع الغرانجKg.m الطاقة الحركية
2/sec
2 Kg.m الطاقة الكامنة
2/sec
2
مصفوفة العطالةKg.m عزم عطالة المحرك
2 m/sec األرضية الجاذبية
2 meter مركز ثقل الذراع
N.m عزم دوران وفة العطالةــمصف

16
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ركزيةـوى المــوفة القــمصف وريوليسـوفة كــمصف
مصفوفة الجاذبية CPU المركزية وحدة المعالجة
RAM ذاكرة مؤقتة عشوائية CCD حساس رؤية رقمي
USB عام منفذ اتصال تسلسلي

17
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الملخص
البعـد كـأداة مهمـة لتمثيـل السـلوك الحركـي وتمثيـل العمليـات المحاكـاة ثالثيـة خدم تقنية تستإلــى آليــة ســيتم التطــرق . فــي هــذا البحــث اإلنتاجيــة المطلــوب تنفيــذها مــن قبــل الروبــوت الصــناعي
خصص لتنفيذ عمليات اللحام. اقترحنا م درجات حرية خمسلروبوت يملك بناء النموذج الرياضيلحســـاب بعـــض زوايـــا مفاصـــل الروبـــوت فـــي كأســـلوب جديـــد بمعـــادالت تقـــاطع دائـــرتين االســـتعانة
نتـائج أظهـرت . MATLAB بيئة في فضاء ثالثي البعد وذلك ضمن تهامحاكاالحركة العكسية و وثوقيـة االسـتعانة بمعـادالت تقـاطع دائـرتين لحسـاب أثبتـت و ،البحث مدى أهمية المحاكاة للروبوت
.بعض زوايا مفاصل الروبوتثم ومن ، للروبوت النموذج الديناميكي إيجادإلى آلية التطرق كما تم في هذا البحث
واستخدام بشكل مصفوفي معادالت العزم كتابة اقترحنابرنامج إلجراء العمليات الحسابية. صممناأثبتت وثوقية االستعانة نتائج ال .المصمم كأسلوب للحل ضمن البرنامجحلقات التكرار
معالجة البيانات ضمن يع سر تو برنامجالكأسلوب للحل لرفع أداء وحلقات التكرار بالمصفوفات .الحاسب
وتصنيع روبوت تسلسلي يملك خمس درجات تصميممراحل تطرقنا في البحث إلىأيضا عرضنا كما ،Soildworksباستخدام برنامج عملهفراغ ، حيث قدمنا منهجية الستنتاجحرية
، كما أجرينا مقارنة بين بين هذا الروبوت تصنيع المستخدمة في المتطلبات التقنيةالتجهيزات و دقة حركة المؤثر النهائي اختبرنانموذج المحاكاة المطور مع الروبوت الحقيقي المصمم، و
.للروبوت
قادرة على تحديد مسار اللحام للمشغولة ذكية منظومةتكمن أهمية هذا البحث في تصميم الحصول على دقة في نضمنبالتالي ،CAD الــ بإحدى برامج هالمراد لحامها دون الحاجة لرسم
تجهيزالالزم لرسم و زمنالتقليل من خالل زيادة واضحة في اإلنتاجية إلى باإلضافةتنفيذ اللحام، وثوقية التصميم المقترح للمنظومة كوسيلة نتائج البحث مدى ثبتتأ. المراد لحامها مشغوالتلا
ضبط المسافة بين مشعل لتشمل منظومةالتطوير كما تم لتحديد المسار في روبوتات اللحام.، حيث لم يتجاوز متوسط تمتاز بدقة عاليةأن منظومة القياس النتائج أثبتت و ، اللحام والمشغولة
.%0.56نسبة الخطأ
18
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كشف انحراف المشغولة عن الموقع االسمي، وبالتالي تضم منظومة لال طورنا إضافة لذلكم مع ءلتصحيح مساره بما يتال الالزمة بالمعلوماتالخاص بروبوت اللحام تزويد نظام التحكم
وثوقية وأهمية المنظومة المقترحة لضبط موضع البحث مدى بين .الموضع الفعلي للمشغولة للروبوت.المشغولة بالنسبة
نمذجة، الموديلة، ، محاكا، المسألة الحركية األمامية، المسألة الحركية العكسيةلحامروبوت كلمات مفتاحية: رؤية حاسوبية، معالجة الصورة. ،الديناميكي
19
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة
، اإلنتاجية أصبح من المعلوم في وقتنا الحاضر الدور الذي تلعبه الروبوتات في العملياتالمبدأ تمثل أنظمة الروبوت من حيث حيث تعد الركيزة األساسية للصناعات الثقيلة والدقيقة.
ويمكننا من خالل استخدام الروبوتات حذف أو ،وسيلة حديثة لعمليات اإلنتاج اآللي المعقدة تحديد العمل اليدوي بشكل كلي أو جزئي في العمليات الصناعية األساسية أو المساعدة.
عملية اللحام من العمليات المعقدة وصعبة المراقبة والتحكم بها بشكل فعال ومن عد ت في الحقيقة يوجد أعداد ضخمة من المنتجات التي تتطلب الصعب وضع معايير قياسية لها.
عمليات لحام خالل تجميعها، لذا تعد الروبوتات المستخدمة لعملية اللحام من أكثر الروبوتات لم. حيث أن استخدام الروبوت لتأدية عمليات اللحام يؤدي إلى زيادة اإلنتاجية المنتشرة في العا
أن جودة المشغوالت الملحومة سوف ترتفع مقابل انخفاض تكلفة المنتج والقوى إلى باإلضافة العاملة.
مية جيدة هو تحريك ي تلعب دورا رئيسيا في الحصول على وصلة لحاتم العوامل الهأ حد أ وبدقة على طول الوصلة اللحامية. من هنا كانت مهمة روبوت اللحام ستقراربامشعل اللحام
دق منه. هذا يعني توفر أبرته وتنفيذ مسارات اللحام بشكل تتركز في استنساخ مهارة العامل وخوتحريكه بدقة على المسار قاعدة بيانات ضمن برنامج التحكم بالروبوت لحمل مشعل اللحام
عمليات اللحام ال يعني أن المشكلة الصناعية قد إلنجاز. إال أن استخدام الروبوت المطلوبانتهت، كوننا عندئذ بحاجة لتجهيزات لضبط توضع المشغولة المراد لحامها ونقل المشغولة إلى
بأس بها لتحضير القطع وهذا قد يتطلب فترة زمنية ال ،موقع توضع الروبوت على خط اإلنتاجأن حدوث أي انحراف للمشغولة المراد إلى باإلضافةالمراد لحامها قبل تنفيذ عملية اللحام،
انحراف مواقع نقاط اللحام عند تنفيذ اللحام النقطي أو إلىسيؤدي االسميلحامها عن الموقع فاض جودة اللحام.مسارات اللحام المستمرة وبالتالي انخ إنجازانحراف مسار اللحام عند
هو ضرورة تزويد روبوت الهاجس األكثر أهمية الذي يشغل بال الصناعيين من هنا كانالمؤثر النهائي ضبط مسارات اللحام وتعديل مسارتحديد و قادرة على ذكية بمنظومة تحكماللحام
20
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بحيث نضمن الحصول على للمشغولة مع االنحراف الحاصل يتالءمبشكل تلقائي بما للروبوت .اإلنتاجيةزيادة و دقة في تنفيذ مسارات اللحام وبالتالي تحسين نوعية اللحام وجودته
يخدم الصناعة ويساهم في تطوير أساليب تحديد مسارات نقدم حال فنيا هذا البحث س فيمنهجية بتقديم ءا بدتمت الدراسة عبر عدة مراحل بحيث تشكل دراسة متكاملة . وضبطها اللحام
ومنهصناعي انطالقا من دراسة النموذج الميكانيكي ومرورا بآلية الحركة روبوت وتنفيذ لتصميم متطورة رؤية ومن ثم تزويد الروبوت بمنظومةتحقيق آليات الحركة، لنظام الوصوال إلى برمجة
بهدف:
المسار مسبقا بإحدى برامج تحديد مسارات اللحام باالستعانة بالليزر ودون الحاجة لرسم -1والتغلب على النقص في مهارته اإلنتاجية، وبالتالي تقليل تدخل العامل في العملية CADالـ
وتحسين نوعية اللحام وجودته.جراء التعديالت -2 لمسار المطلوبة ضبط ارتفاع مشعل اللحام على طول الوصلة اللحامية وا
انحراف للمسار أو لموضع أي حدوث المؤثر النهائي للروبوت بشكل ذاتي في حال المراد لحامها. مشغولةال
كشف مدى انحراف المشغولة المراد لحامها عن الموقع االسمي وتعديل مسار المؤثر -3النهائي للروبوت بشكل ذاتي بما يتالءم مع االنحراف الحاصل بحيث نضمن الحصول على
وذلك بالتقليل من زمن التجهيز اجية دقة في تنفيذ مسارات اللحام، وزيادة واضحة في اإلنت .المراد لحامهاللمشغوالت
ومخططات تصميم فصول وملحق ستةتحتوي على األطروحةهذه المقدمة فإن هذه إلىإضافة نوجز مضمونها فيما يلي: ،لروبوت ومنصة الكاميرا والليزرا
مزايا استخدام وضحنامن ثم و مصطلح الروبوت، تطرقنا إلى تعريف في الفصل األولالروبوتات وأجيالها ومالئمة أصناف عرضناالمختلفة. كما اإلنتاجيةالروبوتات للعمليات
.لتنفيذ عمليات اللحام استخدامها واألشخاص الذين كان لهم أثر في ظهور علم اتتتبعنا نشأة الروبوتفي الفصل الثاني
كان والشركات التي إلى مراحل تطور صناعة الروبوتات التسلسلية طرقناتكما . الروبوتات

21
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ابتكارات الدول العربية أهم ثم تعرفنا على بعض ، ومنناعتهاصدور فعال في تطوير الهأعمال دراسة مرجعية لبعض تضمن الفصل أيضا في مجال صناعة الروبوتات الذكية.
وتزويدها بتقنيات التسلسلية لروبوتاتالسلوك الحركي ل الباحثين السابقين في مجال دراسةنهاية الفصل قمنا بسرد لمحة تاريخية عن نشأة اللحام وأنواعه ومراحل في الرؤية الحاسوبية.
وعرض لبعض أعمال الباحثين في مجال تزويد روبوتات اللحام بتقنيات الرؤية تطوره الحاسوبية.
بناء الموديل من ثمالمدروس، معادالت الحركة للروبوت تطرقنا لشرحفي الفصل الثالث. الروبوت حسب الحاجة بمتحوالت مفاصلالرياضي للروبوت الذي يمكن من خالله التحكم
لحساب بعض زوايا جديدة اقترحنا االستعانة بمعادالت تقاطع دائرتين كطريقة هندسية كما ن معالجة البيانات في برنامج مفاصل الروبوت في الحركة العكسية بهدف اختصار زم
محاكاة الحركة األمامية تنفيذ ل Matlabتصميم واجهة تفاعلية في بيئة تم . المحاكاةمما يتيح ،روبوت دون االستعانة بالمكتبات الجاهزة والخاصة بدراسة الروبوتاتلوالعكسية ل
مرونة عند استخدام البرنامج ويسمح للمستخدم بإجراء التعديالت المطلوبة ألي روبوت مفترض.
اشتقاق النموذج الديناميكي للروبوت، حيث تم إيجادتطرقنا إلى آلية في الفصل الرابع العالقة بين العزم المطبق على المفصل من قبل المحركتحدد اضية التي المعادالت الري
ليشمل في الفصل الثالث برنامج المصممالكما تم تطوير .توالحركة الناتجة عن الروبو بشكل مصفوفي معادالت العزم كتابة حنااقتر . كما تنفيذ الدراسة الديناميكية للروبوت
يع سر تو أدائه رفع كأسلوب للحل ضمن البرنامج، وذلك بهدف واستخدام حلقات التكرار الحاسب.معالجة البيانات ضمن
يملك خمس درجات تسلسلي روبوت وتصنيع تصميم مراحل توضيح تمفي الفصل الخامس عمله،فراغ الستنتاجمنهجية قدمنا حيث ،بارامترات أذرعه في الفصل الثالث حددت حرية
.الروبوتهذا تصنيع المستخدمة في المتطلبات التقنيةالتجهيزات و وعرضنا الضوء على أهمية االستعانة بتقنيات الرؤية الحاسوبية لتطوير سلطنا في الفصل السادس
المشغولة المراد يف مسار اللحام مييزلتمنظومة رؤية صممنا، ثم العمليات اإلنتاجيةعلى طول الوصلة مشعل اللحام طورنا المنظومة لتشمل ضبط ارتفاع ثمومن ، لحامها

22
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كشف مدى انحراف المشغولة المراد لحامها عن الموقع االسمي، وبالتالي تزويد و اللحاميةمع الموضع يتالءمنظام التحكم الخاص بالروبوت بالمعلومات الالزمة لتصحيح مساره بما
الروبوت وعرض نظام التحكم بربط منظومة الرؤية بتم في نهاية الفصل الفعلي للمشغولة.نتائج مع مقارنة نتائج المحاكاة ومن ثم أجرينا بعض التجارب ل ،وكول التخاطب بينهاتبرو
.للروبوتالواقعية للمؤثر النهائي الحركة
تم ذكر العديد من المقترحات والتوصيات لتطوير البحث. وقد تم توثيق النتائج من وأخيرا خالل نشر خمسة أبحاث في مجلة بحوث حلب.
حلب: األبحاث المنشورة في مجلة بحوث جامعة
االستعانة بمعادالت تقاطع دائرتين لحساب بعض زوايا مفاصل الروبوت في الحركة -4 . 3345لعام – 434 العدد – 3سلسلة العلوم الهندسية –العكسية ومحاكاتها
النمذجة الديناميكية لروبوت يملك خمس درجات حرية ومحاكاة حركته في فضاء ثالثي -3 .3345لعام – 433العدد – 3سلسلة العلوم الهندسية –البعد
–تطوير تقنية القياس بالليزر لضبط المسافة بين المشعل والمشغولة في روبوتات اللحام -2 .3345لعام – 433 العدد – 3سلسلة العلوم الهندسية
سلسلة –تقانات الرؤية الحاسوبية باستخدامضبط توضع المشغولة في روبوتات اللحام -1 .3345لعام – 436 العدد – 3العلوم الهندسية
سلسلة –استخدام الليزر الخطي لتحديد مسار اللحام للوصلة التراكبية في روبوتات اللحام -5 .3345لعام – 431 العدد – 3العلوم الهندسية

23
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الفصل األول مقدمة عامة عن الروبوتات
24
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة: 1-1
وخفض تكلفة اإلنتاجية برفعفي مصانعهم زيادة األرباح إلىيون يسعى الصناعدائما العتماد . يمكن تحقيق ذلك من خالل ااألسواقفي المنافسة يزيد قدرتهم على هذا بدورهو المنتجتمتة واستخدام الحاجة إلى األهنا تبرز . من في المصانع آليات موثوقة وتقليل عدد العمالعلى
. [1]المتنوعة في خطوط اإلنتاج الروبوتات
كما . عني العمل القسري أو العمل الشاقكلمة تشيكوسلوفاكية تمصطلح روبوت هو وسيلة قابلة للبرمجة مصممة بأنه (BRA) روبوت حسب الرابطة اإلنكليزية للروبوتيكيعرف ال
وذلك إلنجاز مهام ،لتداول ونقل القطع واألدوات من خالل القيام بحركات مبرمجة متغيرة .معينةتصنيعية
ات:الروبوتمزايا استخدام 1-2
:نوجز منها ما يليالروبوت في الصناعة له عدة مزايا ستخداما
.زيادة واضحة في اإلنتاجية -ق االستثماري على المدى تقليل النفقات حيث يترتب على استخدام الروبوت خفضا في اإلنفا -
.م المحدودة أو المشروعات الصغيرةلكن هذا بالطبع ال ينطبق على المهاالطويل. العديد عند استخدام الروبوت في وباألخص ،التغلب على النقص في مهارة األيدي العاملة -
صعبة.المن المهن .إذ يمكن إعادة برمجة الروبوت للقيام بأعمال مختلفة ،فير المرونة في األعمال الصناعيةتو - .تحسين نوعية اإلنتاج وجودته - .ها خطورة كبيرة على حياة البشراستخدام الروبوت في األعمال التي يمثل القيام ب - .تجنب اإلنسان اإلصابة بالملل في األعمال التكرارية - .تجنيب اإلنسان التعرض لألنشطة الملوثة للبيئة -

25
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
: [2]األنظمة الروبوتية أصناف 1-3
:كما يليف األنظمة الروبوتية تصن
تصنيف الروبوتات حسب السلسلة الحركية: 1-3-1
سمح له بأن يكون ضمن أحد التصنيفات الثالثة بحسب شكل السلسلة تلروبوت ل اإلنشائيةالبنية .(1-1) كما هو مبين في الشكلالحركية: تسلسلي أو تفرعي أو مختلط )تسلسلي مع تفرعي(
أنواع السالسل الحركية للروبوتات (1-1)الشكل
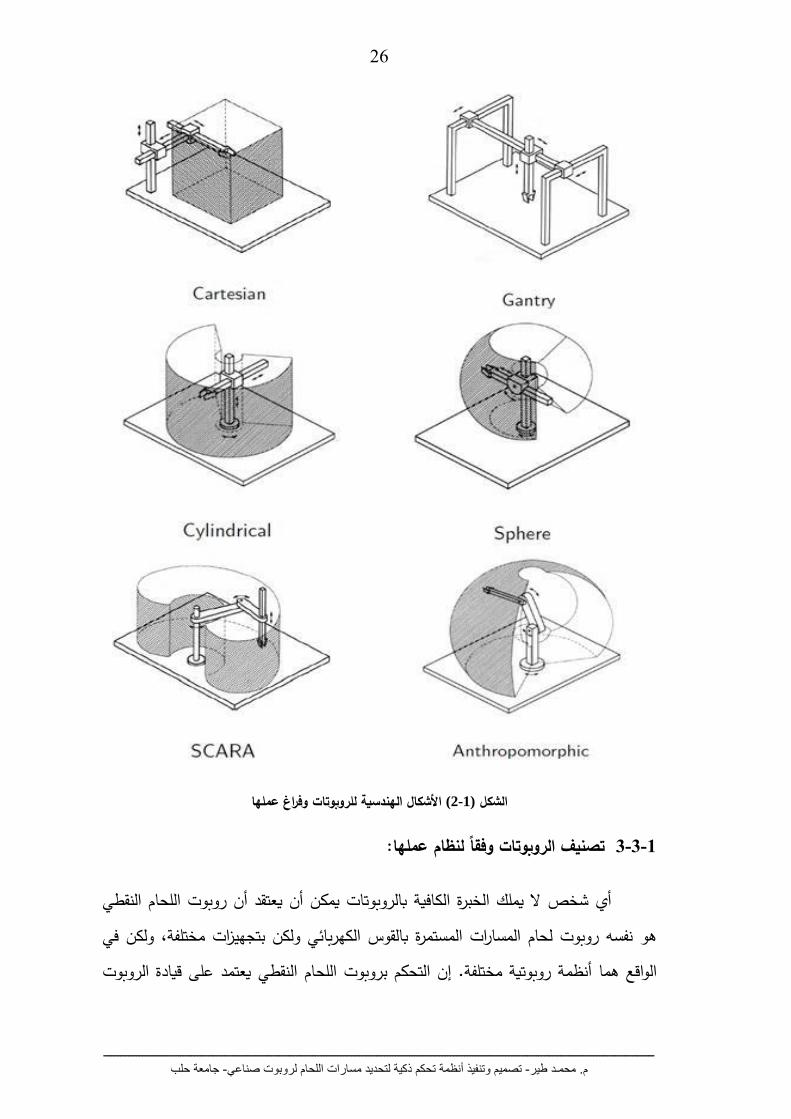
:للشكل الهندسي وفقا الروبوتات تصنيف 1-3-2
:(2-1) مبينه بالشكلكما هي نواع ضمن عدة أ الروبوتات تبعا للشكل الهندسي تصنف
.الروبوتات الديكارتية -1 .الروبوتات األسطوانية -2 .روبوتات جسر الرافعة -3 .الروبوتات الكروية -4 .(انسحابيه-ه)دوارني هروبوتات متمفصل -5
26
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وفراغ عملها األشكال الهندسية للروبوتات (1-2) الشكل
لنظام عملها:الروبوتات وفقا تصنيف 1-3-3
ي لحام النقطال ن أن يعتقد أن روبوتيمك اتبالروبوت الكافية أي شخص ال يملك الخبرةلكن في و ،القوس الكهربائي ولكن بتجهيزات مختلفةب المسارات المستمرة هو نفسه روبوت لحام
قيادة الروبوت يعتمد على يالنقطلحام الإن التحكم بروبوت .الواقع هما أنظمة روبوتية مختلفة

27
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
نظام المسار من نقطة إلى نقطة وال ينصح بهذا النظام إلنجاز لحام القوس الكهربائي الذي وفق لذا تصنف األنظمة الروبوتية وفقا لطريقة عملها كما يلي: يحتاج لنظام المسار المستمر.
المؤثر تحركيفي هذا النوع من الروبوتات :(PTP) من نقطة إلى نقطة نظام المسار -1المسار في تخزينيتم ومن ثم في الفراغ إلى نقطة ثانية. معينةمن نقطة للروبوت النهائي
أثناء دورة العمل. إن هذا النظام موجود في تلقيم المسار للروبوتويتم إعادة ذاكرة الروبوتلروبوت إلى ل المؤثر النهائي تحركي يعملية اللحام النقط أثناء تنفيذ. يلحام النقطالروبوت
ثم ،النقطة المراد لحامها الواقعة تماما بين إلكترودي مشعل اللحام ومن ثم تتم عملية اللحامتتكرر هذه ، و لروبوت إلى نقطة جديدة حيث ينجز فيها اللحام أيضال المؤثر النهائي تحركي
اللحام إلى نقطة البداية. مشعلط المطلوبة ومن ثم يعود العملية حتى يتم لحام جميع النقاأن أذرع الروبوتفي هذا النوع من الروبوتات يمكن لجميع :(CP) المستمر المسار نظام -2
تتحرك بنفس الوقت، وكل واحد منها يتحرك بسرعة مختلفة يتم تنسيقها بواسطة الحاسب القدرة على لهلذلك فإن هذا النوع من الروبوتات .وذلك من خالل تتبع المسار المطلوب
.في الفراغ قاطتتبع مجموعة نتتحرك حيث ،الكهربائي القوسب المسارات المستمرة إن هذا النظام موجود في روبوت لحام
للروبوت على المؤثر النهائيالمثبت على مشعل اللحام ويعمل جميع أذرع الروبوت سويا .ةالمطلوب يةاللحامالوصلة على طول مسار إجراء عملية اللحام
:الروبوتات وفقا للمهام المطلوبة منها تصنيف 1-3-4
الروبوتات الصناعية: تستخدم في عمليات التصنيع على نطاق واسع بما في ذلك تجميع - إلخ. طالء...الاللحام و ،المواد نقل ،األجزاء
في األماكن التي ال يستطيع لتواجدعن بعد: يخصص هذا النوع ل روبوتات االستكشاف - البشر البقاء فيها.
. إلخ ...روبوتات معالجة المواد الخطرة: وتستعمل مثال إلزالة القنابل -
.إلخ ...تسليم البريد ،ضبط األبواب ،روبوتات الخدمة: تستعمل مثال ألغراض الحراسة -
28
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:لطريقة عملها ا ف الروبوتات وفقيصنت 1-3-5
تقاد مباشرة من قبل اإلنسان لتخفيف الجهد روبوتات : هي(Manipulators)المناوالت -العضلي عنه أو للوصول إلى مناطق ال يستطيع اإلنسان الوصول إليها )مناطق خطرة أو
.ضيقة(تعمل وفق تتابع روبوتات: هي عبارة عن (Sequence Robots)الروبوتات التتابعية -
معين من الحركات ووفق شروط محددة مسبقا.ة من الحركات تم لتكرر سلس روبوتات: هي (Playback Robots)الروبوتات المقلدة -
تخزينها في ذاكرة وحدة التحكم الخاصة بالروبوت بعد أن قامت بتنفيذها في المرة األولى تحت قيادة مباشرة من المستثمر.
القيام بوظائف تكون قادرة على روبوتات هي :(Intelligent Robots)الروبوتات الذكية -متغيرة تتبع لقرارات يمكن أن تتخذ من قبل الروبوت نفسه معتمدا على معطيات حساساته
الخارجية.
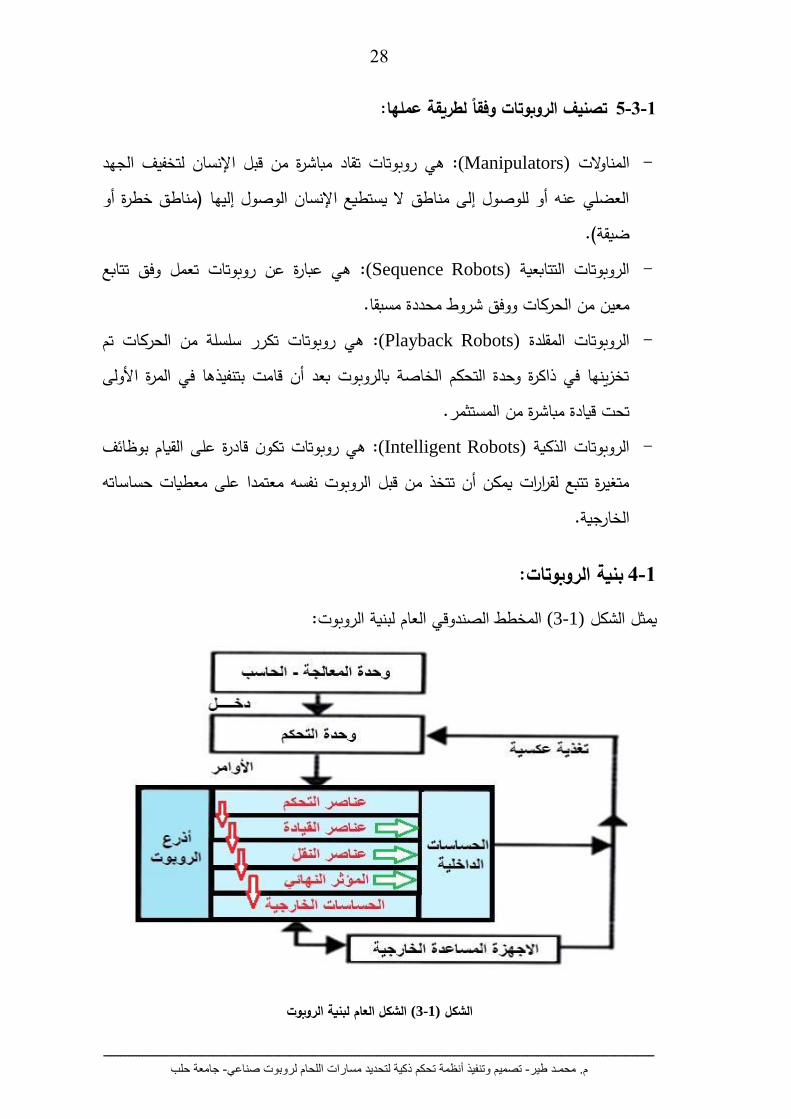
بنية الروبوتات: 1-4
:المخطط الصندوقي العام لبنية الروبوت (1-3) الشكليمثل
الشكل العام لبنية الروبوت (1-3) الشكل

29
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
: [3]أجيال الروبوتات 1-5لها هي روبوتات :(Programmable Robots)الروبوتات القابلة للبرمجة األول: الجيل -
،ونظام تحكمها يتكيف بسهولة مع عمليات يومية متنوعة ألذرعقيادة تتحكم في جميع ا .الثابت في ظروف محددة بدقةملية تعيد هذه الروبوتات نفس البرنامج أنجاز أي عوبعد
يف يتكهي روبوتات قادرة على :(Adaptive Robots)الروبوتات التكيفية الثاني: جيلال -المحيطية، لذلك فهي مجهزة بحساسات ولها نظام ظروف العملنفسها باستقاللية مع
لتوليد إشارات التحكم المالئمة. الواردة من الحساسات متطور لمعالجة المعلومات
تمتلك حساسات هي روبوتات :(Intelligent Robots)الروبوتات الذكية الثالث: جيلال -يجاد الحلول بشكل متنوعة مع حاسوب دقيق ومتطور لمعالجة المعلومات وتمييز المواقع وا
كما تزود هذه الروبوتات بأنظمة رؤية .مسبقا الضرورية في ظروف غير محددة مهاملآني ل أبعادها.تحديد يز األجسام و يمتو حاسوبية إلدراك
: [4]تالءم الروبوت مع عمليات اللحام 1-6 تحت تأثيرمع بعضها يةندالمع القطع عملية وصل هين اللحام بالقوس الكهربائي إ
لذا عادة ما ، األجزاء المعدنية الملحومة الحرارة العالية الناتجة عن القوس بين اإللكترودات وبينيتطلب تنفيذ عملية اللحام الروبوتات الصناعية. تطبيقات اللحام من أكثريكون هذا النوع من
ضرار مثل األشعة الفوق األخطار و من قبل العامل، كما أن العامل يكون عرضة لألجهد مهارة و المرئية التي تؤذي العينين بشكل كبير باإلضافة إلى األدخنة السامة بنفسجية واإلشعاعات
تقدم مشعل اللحام هي سرعةلحام عملية النجاح العوامل المؤثرة على م أهاللحام. الناجمة عنيؤدي ازدياد التقدم أما ،التقدم إلى ثقب المعدنتأخر حيث يؤدي على طول الوصلة اللحامية،بحيث تكون حركة مشعل لذلك البد من أن تتم برمجة الروبوت ،إلى انقطاع القوس الكهربائي
. على استقرار القوس الكهربائي الروبوت بحيث يحافظ ةمدروس اللحام
اللحام بالروبوت يمتلك الميزات التالية:عملية إنجازإن
نظام تحكم قابل للبرمجة لضبط بارامترات اللحام باستخدام لغات برمجة عالية المستوى. - والتحرك عليها بدقة عالية مع إمكانية التكرار. مسارات اللحامإمكانية تحديد -

30
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الحاسب المتقدمة التي تمكن الروبوت من تنسيق حركاته بشكل دقيق.كفاءات -
والتنسيق بين حركة مشعل اللحام معين م تقنيات اللحام تتطلب نظام حركةبما أن معظوذلك ،ومصدر طاقة اللحام عندها نجد أن الروبوت هو التطبيق األمثل لمعظم عمليات اللحام
ن معظم عيوب اللحام كما أ. في أتمتة عملية اللحامي قد تظهر بالرغم من كل الصعوبات التالتي قد تظهر في اللحام اليدوي يمكن التغلب عليها والتقليل من ظهورها باستخدام اللحام بواسطة
.دقة في تنفيذهاا والتي تتطلب عمليات اللحام الصعبة جدإمكانية إنجاز باإلضافة إلى ،الروبوت
:مراحل اللحام بالروبوت 1-7
:وهي متتاليةتتألف من ثالثة مراحل باستخدام الروبوت حاملأي عملية
وضبط توضعها أمام المطلوب لحامها المشغولةعامل بتجهيز اليقوم مرحلة التحضير: - كود رسالوأخيرا يتم إاللحام. بارامتراتد يحدوتمعدات اللحام الروبوت. فيما بعد يتم ضبط
.CADبرامج المسار بإحدى روبوت بعد رسمإلى ال مسار اللحامضبط متغيرات العملية مع على روبوت ال يعملأثناء إجراء عملية اللحام مرحلة اللحام: -
قادرا على كما يجب أن يكون الروبوت المراقبة المستمرة لعملية اللحام باستخدام الحساسات. نجاز الدرزة اللحام مشعلالحفاظ على توجيه بشكل دقيق اللحامية أثناء تتبع مسار اللحام وا
التحكم نظام. لتحقيق ذلك يجب أن يكون وتعديل متغيرات اللحام في الوقت المناسب قادرا على إجراء محاكاة واقعية لعملية اللحام. بالروبوت
حيث يفحص ،في اللحام اليدوي عادة تأتي هذه المرحلة بعد مرحلة اللحام :قييممرحلة الت -إذا كانت بحاجة إلى تعديل. مقبولة أو ويقيم جودتها إذا كانت لمشغولةعامل اللحام جودة ا
مع مرحلة اللحام وذلك متزامنيمكن إجراء هذه المرحلة بشكل بالروبوت اللحام نظامفي المشغولةبواسطة استخدام حساسات متطورة قادرة على إعطاء صورة واضحة عن جودة
عملية اللحام. إنجاز أثناء
الخالصة: 1-8
. ثم تعرفنا على اإلنتاجيةإلى دور الروبوتات في تطوير العمليات تطرقنافي هذا الفصل أصناف وأجيال الروبوتات ومالئمة استخدامها لتنفيذ عمليات اللحام.
31
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الفصل الثاني البحث المكتبي
32
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة: 1-2
بالنتيجة المراد غالبا ما أدى إلى فشل في الماضي روبوتاتاستبدال األشخاص بالعن ةعاجز تكون الروبوتات تكون لديها قدرات ميكانيكية للمعالجة والتنفيذ بينما ألن إليها الوصول
يستعملون مقدراتهم اإلدراكية في تنفيذ العمالن إتصميم العملية والتحكم الكامل بجزئيات العملية. ذ التنفي تعتمد علىاضي والحاضر الناجحة في الم اتواسعة من الروبوتالغلبية األأما ،العمل
عمل عليها ولكن بال تعديل أو باألحرى بتعديل طفيف جدا . إن تالمتكرر للبرامج الثابتة التي جهود التقنيين الماهرين وغالبا زالت تتطلب الكثير من هي عملية ما اتتصميم وبرمجة الروبوت
فوري وضبط يتطلب معالجة بالعملية المستمرن التحكم إما كلفت هذه البرامج أكثر من الالزم. يف تك سهل أنظمة تحكم ذكيةب لذا فإن االستعانةوهذه هي الناحية الصعبة بالتحكم. ، للبارامترات
.التغييرات في البيئة المحيطة معخطط الروبوت
أثر في ملهالذين كان واألشخاص اتنشأة الروبوت نسلط الضوء على في هذا الفصل صناعةدور فعال في تطوير لهالشركات التي كان سنتعرف أيضا على ا .ظهور علم الروبوتات
ات. كما عرضنا بعض األبحاث المنجزة في مجال الدراسة الحركية للروبوت وتزويدها الروبوت بأنظمة الرؤية الحاسوبية.
: [5]الروبوتات نشأة عن لمحة تاريخية 2-2
في الماضي البعيد وأطلق عليها اختراعها تم إلى أجهزة آلية الحديث جذور الروبوت رجعتتمثال صنع الميالد قبلعام 1500حوالي قبل ي عهد قدماء المصريينالت ذاتية الحركة. فآ
اخترع قبل الميالداليونان في القرن الرابع أصواتا جميلة في الصباح. وفي للملك ممنون يصدرفي أوروبا اهتم القرون الوسطى في عالم الرياضيات أركيتاس حمامة آلية يمكنها الطيران.
باآلالت ذاتية الحركة وصنعا البعض منها. كبيرا اهتماما الفيلسوفان ألبرت فاجنوس وروجر باكون
حيث ،في مسرحية لكارل كابك بوت كانت في بداية القرن العشرينبداية ظهور كلمة رو العمال العاديين تقوم بنفس األعمال التي يقومون بها وتملك عوضا عنعرض كابك آالت
حينها بدأتمفردات اللغة اإلنجليزية و إلىأدرج مصطلح روبوت 1921في عام مشاعر أيضا. تلك نشر في الكتب وأفالم الخيال العلمي التي أعطت فكرة وتصور علمي عن ت روبوت كلمة

33
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وصلت المسرحية إلى اليابان وهناك تسببت في 1923في عام العالم. تغزوسي اآلالت التلم عن يعرض أول ف 1926في عام .الروبوت حدوث اهتمام ياباني بهذا االختراع الجديد المسمى
الروبوتات في ألمانيا.
الجيل حقيقة وظهر إلىت صناعة الروبوتات حولمن القرن الماضي تفي الخمسينيات .حاسبات اآلليةصناعة ال وتطور اإللكترونيةاختراع الدارات بعد األول من الروبوتات الصناعية
كان وزن ، جورج ديفول من قبل المهندسي تم تصميم أول روبوت صناع 1959في عام .(1-2)طن وتدور أذرعه عبر مشغالت هيدروليكية كما هو مبين في الشكل 2الروبوت حينها
أول روبوت صناعي (1-2)الشكل
مثل الطالء في المصانع للقيام باألعمال الروتينيةالروبوت م استخدتم ا في البداية الروبوتات كون ،التي تحتاج إلى قوة عضلية مثل نقل القطع والمناولة باإلضافة إلى األعمال
وازدياد قدرة مع تطور أنظمة التحكم اآللية .في ذلك الوقت لم تكن تملك حساسات خارجية الروبوتاتازدادت قدرات سبعينيات القرن الماضيفي الحاسبات اآللية التي تشغل الروبوتات
اإللكترونيةشرائح الأصبحت تقوم بأعمال دقيقة ومركبة كصنع وتم تزويدها بحساسات خارجية ف .دقة في تنفيذها وضبطها مثل عمليات اللحاموغيرها من األعمال التي تتطلب
بالروبوت لجمع عينات NASA األمريكيةوكالة الفضاء تاستعان 1975م في عاتم ابتكار أولى حلقات التحكم الرقمي والتي مكنت 1986في عام للتربة من كوكب المريخ.
المهندسين من التحكم بمحركات الروبوت بشكل أفضل وأدق، كما سمحت باستخدام محركات تم 1991السيرفو لتدوير أذرع الروبوت وظهر ما يدعى الجيل الثاني من الروبوتات. في عام
يجاد نموذج ديناميكي متكامل تم تطبيقه إنجاز حلقات التحكم الرقمية بالعزم والتي مكنت من إي خدمة روبوت ف 25000أدخل حوالي 1995عام ، وفي1994على أول روبوت في عام . صناعة السيارات في أمريكا
34
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
إلى فتح آفاق جديدة لم تكن دى أفي برمجة الروبوتات صنعيإدخال أساليب الذكاء الن إالروبوتات التي تعتمد على أنظمة الجيل الثالث من في بداية التسعينات ظهر . ممكنة من قبل
تم تقديم ميزة تعاون الروبوتات على إنجاز المهام و ،(Fuzzy,Neuron) الحديثة الذكية التحكم .1996معا في عام
تم تصنيع كاشفات التصادم لتجنب تحطم الروبوتات وحساسات تمييز 1998في عام تم تطوير العديد من الميزات مثل ومنذ ذلك الحين. الحمل للحصول على األداء األمثل للروبوت
. المستخدمة لغات البرمجة طويرتخفيض وزن الروبوت وتو أداء الروبوتسرعة
ومن ، الحاسوبيةالرؤية أنظمة أما اليوم فأصبحنا نتكلم عن الروبوتات التي تستعمل نظام كون سيت يالتي تستعمل الرؤية في المجال الصناعي ه الروبوتية أشهر األنظمة
.ركة جنرال موتورز للسيارات بكندافي ش قطعفرز الل المستخدم
لتكنولوجيا الصناعية والتقنية اإللكترونية والرقمية وتسهيل وسائل لالتطور السريع أدىحيث ،الروبوتات الصناعية بشكل واسع ومتزايد في المؤسسات الصناعية راانتشإلى االتصال
مليون إلى تقريبا بأن عدد الروبوتات في العالم يصل 2014تشير اإلحصائيات في نهاية عام .روبوت ألف ثالثمائةو
: [6]تطور صناعة الروبوتات التسلسليةمراحل 2-3أول روبوت صناعي تسلسلي كما هو األمريكية Unimationصنعت شركة 1959في عام -
الثقيلة من مكان قطعال نقلو التقاطمهمة هذا الروبوت ت كان .(2-2)مبين في الشكل هي إنتاجهاأولى الشركات التي استعانت بهذا النوع من الروبوتات على خطوط . آلخر
.4164في عام وذلك شركة صناعة السيارات جنرال موتورز األمريكية
أول روبوت صناعي تسلسلي (2-2)الشكل

35
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
أول روبوت اسطواني كما هو مبين في األمريكية AMFصنعت شركة 1962في عام - وتم بيعة لشركة صناعة السيارات فورد. ،(3-2)الشكل
اسطوانيأول روبوت (3-2)الشكل
كما هو أول روبوت إلنجاز اللحام النقطي Unimationصنعت شركة 1969في عام -األمريكية لصناعة GMC ، وتم بيع عدد من تلك الروبوتات لشركة(4-2)مبين في الشكل
من عمليات لحام هياكل السيارات بواسطة تلك الروبوتات. %90السيارات. حيث تم إنجاز
روبوت إلنجاز اللحام النقطيأول (4-2)الشكل
ستخدم إلنجاز ي تسلسلي النرويجية أول روبوت Trallfaشركة صنعت 4161في عام - . (5-2)كما هو مبين في الشكل عمليات الطالء
أول روبوت إلنجاز عمليات الطالء (5-2)الشكل
36
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
السوق اليابانية بتوقيع عقد مع شركة Unimationدخلت شركة 1969في عام -Kawasaki تم تصنيع ، و اليابانية لتصنيع روبوتات في اليابان وتصديرها للسوق األسيوي
.1969أول روبوت تسلسلي في اليابان في نهاية عام األلمانية أول روبوت تسلسلي يملك ست درجات Kukaصنعت شركة 1973في عام -
حرية. مزود بحساسات رؤية.اليابانية أول روبوت صناعي Hitachiقدمت شركة 1973في عام -أول روبوت إلنجاز عمليات اللحام المستمرة Unimationصنعت شركة 1974في عام -
.(6-2)بالقوس الكهربائي كما هو مبين في الشكل
أول روبوت إلنجاز مسارات لحام مستمرة (6-2)الشكل
سمي حينها أول روبوت صناعي ديكارتي Olivettiقدمت شركة 1975في عام -SIGMA ستخدم إلنجاز عمليات التجميع في شركة جنرال موتورز.وأ
كما هو Scaraأول روبوت من نوع اليابانية Kawasakiصنعت شركة 1978في عام -
.(7-2) مبين في الشكل
Scaraمن نوع أول روبوت صناعي (7-2)الشكل
األلمانية أول روبوت تسلسلي يملك ست درجات حرية Reisشركة صنعت 1978في عام - .(8-2)القطع ونقلها كما هو مبين في الشكل طيستخدم اللتقا

37
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ونقلها أول روبوت يملك ست درجات حرية اللتقاط القطع (8-2)الشكل
اليابانية أول روبوت تسلسلي مزود بمحركات Nachiشركة صنعت 1979في عام -صص إلنجاز عمليات اللحام كهربائية لتدوير األذرع عوضا عن األنظمة الهيدروليكية، وخ
النقطي.األمريكية أول روبوت تسلسلي عمالق لنقل الحموالت Parشركة صنعت 1981في عام -
.(9-2)في المستودعات كما هو مبين في الشكل
أول روبوت عمالق لنقل الحموالت (9-2)الشكل
يستخدم Deltaالسويسرية أول روبوت من نوع Demaurexشركة صنعت 1992في عام - .(10-2)كما هو مبين في الشكل إلنجاز أعمال التعبئة والتغليف
إلنجاز أعمال التعبئة والتغليف Deltaأول روبوت من نوع (11-2)الشكل

38
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كما هو مبين في ي ر األلمانية الروبوتات بدليل ليز Reisزودت شركة 1998في عام -بهدف توجيه المؤثر النهائي للروبوت لمنع حدوث تصادمات أثناء ، وذلك (11-2)الشكل حركته.
أول روبوت مزود بدليل ليزري (11-2)الشكل
كأكبر شركة لصناعة الروبوتات في العالم، السويدية ABBبرزت شركة 2004في عام - .1974الف روبوت منذ بدأ تأسيسها عام 100حيث باعت
اإليطالية أول جهاز السلكي لقيادة الروبوت كما Comauشركة صنعت 2006في عام -، يمكن من خالله التخاطب مع الروبوت عن بعد وبالتالي (12-2)هو مبين في الشكل
ضمان السالمة المطلقة للمستخدم.
الروبوت بالكاملجهاز السلكي لقيادة (12-2)الشكل
مبين في كما هو خف روبوت تسلسلي في العالم أ Kukaشركة صنعت 2006في عام - منخفض للطاقة. باستهالك، جميع أذرعه مصنوعة من األلمنيوم ويتميز (13-2)الشكل
39
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
في العالم مصنوع من األلمنيومتسلسلي أخف روبوت (13-2)الشكل
نظام تحكم بالروبوت متطور يتنبأ أول اليابانية Fanucقدمت شركة 2010في عام - باالهتزازات التي تنتج عن حركة أذرع الروبوت ويعمل على تخفيفها.
لصناعة العالمية حتى وقتنا الحالي تصاعدت وتيرة المنافسة بين معظم الشركاتو ذلك الحين ذمنا بشكل ذاتي أثناء تنفيذ هروبوتات ذكية مزودة بأنظمة رؤية تمكن الروبوتات من أتخاذ قرارات
مهامها.
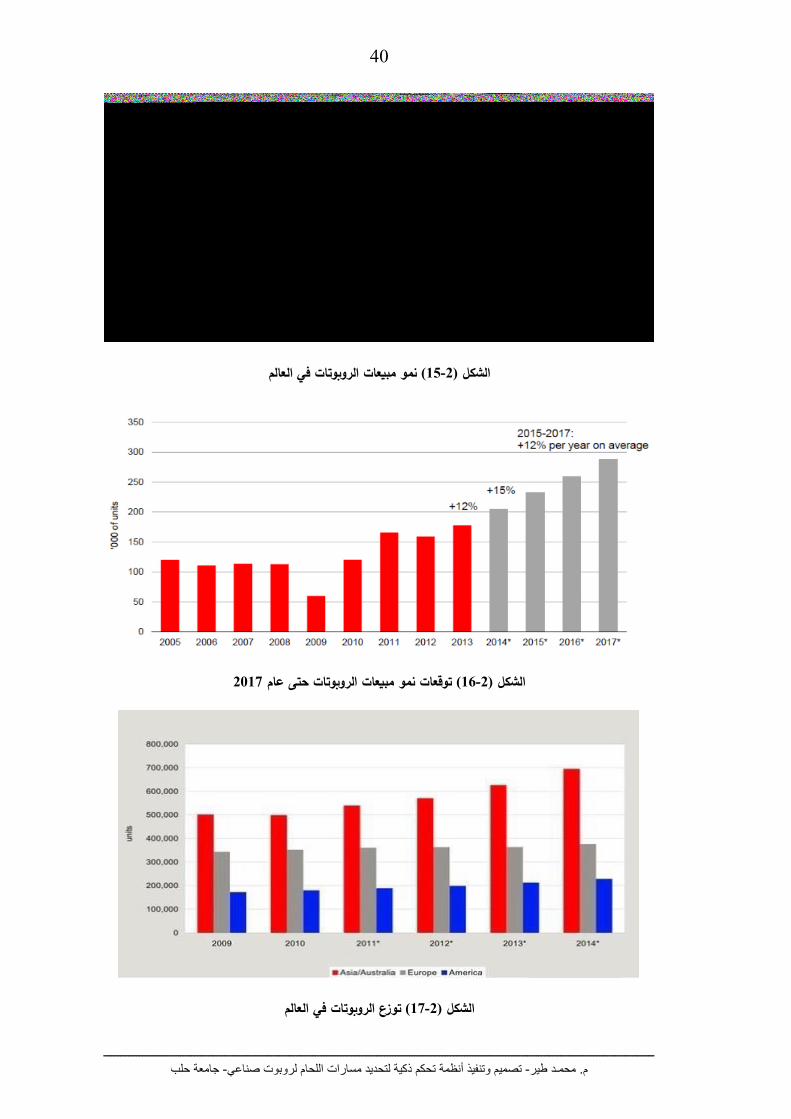
: [7]اتالروبوت صناعة واستخدام في مجال إحصائيات 2-4
رضت في ندوة لمنظمة االتحاد الدولية ع التي اإلحصائياتأخر ظهر األشكال التالية ت وتهدف إلى جمع وتفسير 1987أسست هذه المنظمة في عام .2015في عام IFRللروبوتيك
بيانات سوق الروبوتات في جميع أنحاء العالم.
تطبيقات الروبوتات في العالم (14-2)الشكل
40
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
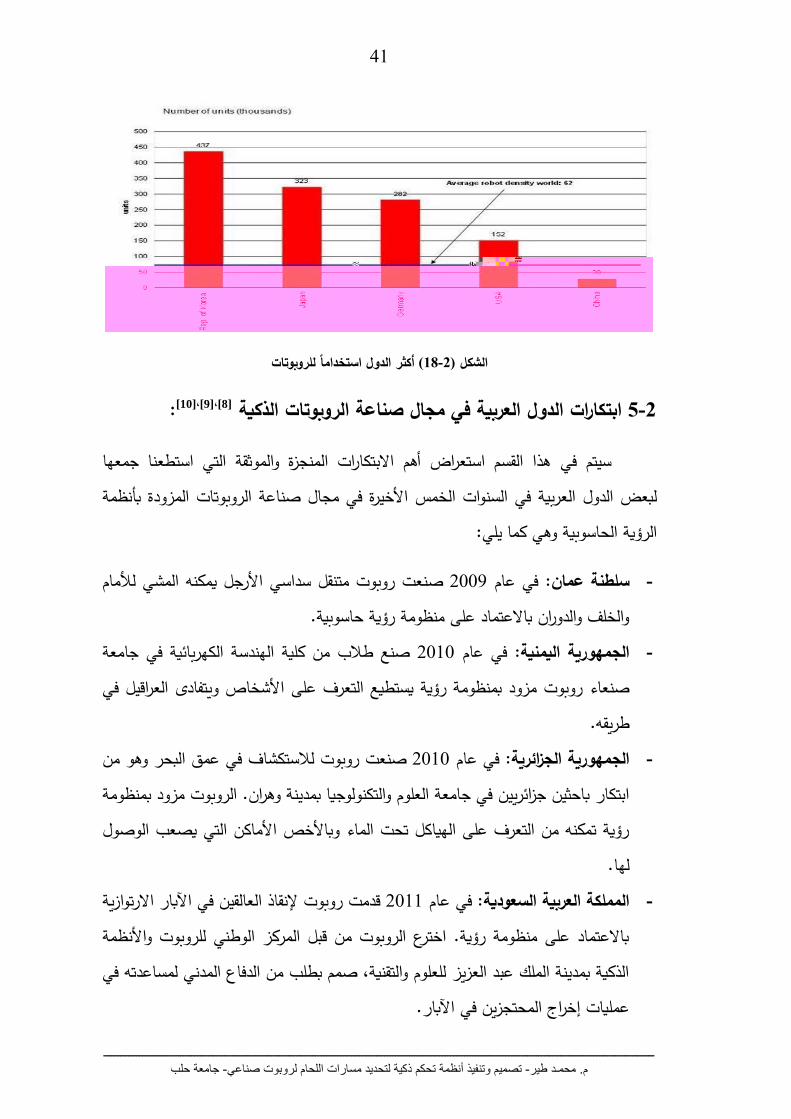
نمو مبيعات الروبوتات في العالم (15-2)الشكل
2117توقعات نمو مبيعات الروبوتات حتى عام (16-2)الشكل
توزع الروبوتات في العالم (17-2)الشكل
41
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
للروبوتات استخداما الدول ثرأك (18-2)الشكل
:[10]،[9]،[8] ات الذكيةالروبوتصناعة ابتكارات الدول العربية في مجال 2-5
جمعها ناالتي استطع والموثقة المنجزة االبتكاراتأهم ضرااستع القسم هذا في سيتمالمزودة بأنظمة الروبوتات صناعةفي مجال في السنوات الخمس األخيرة العربية الدول لبعض
كما يلي:وهي الرؤية الحاسوبية
سداسي األرجل يمكنه المشي لألمام متنقل روبوت صنعت 2009في عام مان:سلطنة ع - والخلف والدوران باالعتماد على منظومة رؤية حاسوبية.
من كلية الهندسة الكهربائية في جامعة طالب صنع 2010في عام :يةاليمنالجمهورية -األشخاص ويتفادى العراقيل في يستطيع التعرف على مزود بمنظومة رؤية صنعاء روبوت
.هطريقفي عمق البحر وهو من لالستكشافروبوت صنعت 2010في عام :يةجزائر الجمهورية ال -
ابتكار باحثين جزائريين في جامعة العلوم والتكنولوجيا بمدينة وهران. الروبوت مزود بمنظومة رؤية تمكنه من التعرف على الهياكل تحت الماء وباألخص األماكن التي يصعب الوصول
لها.قدمت روبوت إلنقاذ العالقين في اآلبار االرتوازية 2011في عام المملكة العربية السعودية: -
باالعتماد على منظومة رؤية. اخترع الروبوت من قبل المركز الوطني للروبوت واألنظمة الذكية بمدينة الملك عبد العزيز للعلوم والتقنية، صمم بطلب من الدفاع المدني لمساعدته في
عمليات إخراج المحتجزين في اآلبار.

42
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وهو الحدود، وحماية لمراقبة روبوت صنعت 2012 عام في: العربية مصر جمهورية - الروبوت. الشروق بأكاديمية واالتصاالت اإللكترونيات هندسة قسم لطالب تخرج مشروع لحماية ذاتي بشكل القرارات واتخاذ الغريبة األجسام على للتعرف ليلية رؤية بمنظومة مزود
من كبير عدد وسالمة أمن لحفظ المراقبة جنود محل الروبوت اهذ حليمكن أن ي. الحدود .الحدود على الموجودين الجنود
روبوت إلخماد الحرائق مزود بمنظومة صنعت 2012في عام : الجماهرية العربية الليبية - رؤية لتحديد موقع النيران بشكل ذاتي.
روبوت مزود بمنظومة رؤية لتفكيك القنابل صنعت 2012في عام :يةالعراق الجمهورية - وقادر على الوصول إلى أماكن يصعب على اإلنسان االقتراب منها.
روبوت للشحن البحري يحتوي على صنعت 2012في عام مارات العربية المتحدة:اإل -الروبوت في الميناء ممنظومة رؤية مبرمجة مسبقا للتعرف على األلوان واألشكال، استخد
روبوت مزود بمنظومة رؤية للتعرف صنعت أيضا في نفس العام .تالبحري لنقل الحموال على حبات التمر وقطفها.
طلبة إنتاجنموذج روبوت عسكري من صنعت 2012في عام :يةتونسالجمهورية ال -المعهد العالي للدراسات التكنولوجية بمدينة نابل مزود بكاميرا عالية الدقة وبندقية ويمتاز
بسرعة حركته وقدرته على التعرف على األجسام وتتبع الهدف.يتم ،روبوت للكشف عن المعادن في المناجم صنعت 2012في عام :يةالسودانالجمهورية -
التحكم به عن بعد ومزود بمنظومة رؤية لتجاوز العقبات في طريقه.روبوت إلخماد الحرائق، حيث يمكنه تتبع الهدف صنعت 2012في عام :يةالمغربالمملكة -
تلقائيا باالعتماد على منظومة رؤية وهو من ابتكار طلبة جامعيين في مخبر اإللكترونيك في كلية العلوم بمدينة الرباط.
روبوت مزود بمنظومة رؤية قادر على التعرف على صنعت 2013في عام ولة فلسطين:د -األجسام المشبوهة والخطيرة التي تعرض حياة المواطن للخطر وهو من إنتاج أربعة طالب
من قسم الكهرباء في جامعة بولتكنك في مدينة الخليل.روبوت إلطفاء الحرائق. حصل مخترع الروبوت على صنعت 2013في عام دولة الكويت: -
الروبوت األوامر عن طريق التوجيه اآللي ينفذ براءة اختراع من الواليات المتحدة األمريكية.

43
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
عن بعد، كما يمكنه اتخاذ القرارات بشكل ذاتي من خالل االستعانة بمنظومة رؤيةول إليها أو التي يمثل اقتحامها في األماكن التي يصعب على رجال اإلطفاء الدخ وخصوصا
تهديدا على حياتهم.لكشف عن األلغام مهمته اروبوت صنعت 2014في عام :الهاشمية المملكة األردنية -
أنظمة رؤية متطورة وهو من اختراع طالب ماجستير من قسم بحساسات و األرضية مستعينا ، وقد فاز المشروع بالمركز األول األردنيةالهندسة الميكانيكية في جامعة العلوم والتكنولوجيا
في المسابقة التي عقدت مؤخرا على هامش المؤتمر العالمي التاسع للميكاترونكس وتطبيقاتها.
: [11]عن نشأة اللحام لمحة تاريخية 2-6الصناعي واإلنتاج اإلنهاءطرق الوصل استخداما في عمليات أكثريعتبر اللحام من
من هنا يمكن تعريف اللحام على انه . متعددةالتي تتمتع بها طرقه ال المتعددةنظرا للمزايا وذلك مختلفة. إجراءات ستخداماباالستمرارية بين القطع بشكل غير قابل للفصل إنشاءعملية
عصر ويعود تاريخ اللحام إلى ،اللحام هو حرفة قديمة تدمج ما بين الفن والخبرة البشريةسنة قبل الميالد. السومريون اعتادوا على صنع 3000حوالي أي إلى والمصريينالسومريين
سيوفهم عبر ضم أجزائها باللحام القاسي. أما المصريين فقد اكتشفوا اللحام بعد أن قاموا بتسخين الحديد ليصبح التعامل معه أسهل وطبقوا عليه اللحام بالضغط عبر الطرق على األجزاء المراد
.يات اللحام التي سجلت في التاريخعمل ىهذه هي أولو ،حموصلها لتلت
نتج في ذلك العصر العديد وأ الطرق ب اللحامخالل العصور الوسطى بشكل كبير تطور . كان هذا حتى القرن التاسع عشر إلى حين ظهرت عدة اكتشافات الملحومة بالطرق من القطع
مما ،لم المعادن وعلم انتقال الحرارةأيضا عفي مجال الحقول الكهربائية والمغناطيسية وتطور أدى إلى حدوث ثورة مدهشة في علم اللحام.
تخزين الطاقة في خلية لطريقة (Alessandro Volta)العالم أخترع 1800في عام شرح 1801عام في . ولى في استخدام الكهرباء عمليا وكانت هذه الخطوة األ ،فولطية أو البطارية
كيفية توليد شرارة كهربائية بين قطبين من الكربون. (Sir Humphrey Davy)ي العالم االنكليز

44
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الحرارة الناتجة عن القوس (Auguste De Meritens)استخدم العالم 1881في عام هذه العملية سجلت في فرنسا. و ،جل صنع البطارياتأم صفائح من الرصاص من االكهربائي للح
هذه . 1887في عام سجلوها واألمريكيون 1885أما البريطانيون فقد سجلوا هذه العملية في عام كانت بداية اللحام باستخدام قوس ناشئ عن قضبان مصنوعة من الكربون.
في عام ساهم بشكل كبير في تطور لحام القطع.، و 1887عام في اللحام مشعلع ختر أ حيث ،قوسي باستخدام قطب كهربائي معدنياللحام ال( (C.L. Coffinخترع العالم ا 1890
الوصلة ليحدث عندها االلتحام. نطقةيذوب المعدن نتيجة للقوس الكهربائي الناشئ في م
قطب كهربائي معدني مغلف إنكلترافي (Strohmenger)أنتج العالم 1900في عام أثناء الطبقة رقيقة جدا إال أنها كافية لتؤمن ثباتا للقوس الكهربائيالطين أو الكلس. كانت هذه ب
. تنفيذ اللحام
وشركة (Oscar Kjellberg)قام العالم 1914و 1907في الفترة الواقعة بين عام (ESAB) حيث أنتجت قضبان من األقطاب الكهربائية عبر ،باختراع قطب كهربائي مغلف
والسيليكات ثم تجفيف هذا زل في مزيج كثيف من الكربونات غمس أسالك قصيرة بدون غالف عا . الغالف
لحام األلمنيوم وأكسيد الحديد (Goldschmidt) اخترع العالم األلماني 1903في عام م قضبان السكك الحديدية. اوالذي استعمل للمرة األولى في لح
هياكل حينها للحاماستخدم اللحام النقطي و (E.G. Budd)العالم اخترع 1912في عام . االسيارات في أمريك
هائال على األسلحة والذي يعني إنتاج هائل من سببت الحرب العالمية األولى طلبا الفرصة للعديد دخل اللحام كطريقة لتلبية طلبات هذا اإلنتاج معطيا أ األجزاء المعدنية. وبالتالي
آالت اللحام. من الشركات األوروبية واألمريكية إلنتاج العديد من
خالل العشرينات أجريت أبحاث ضخمة لمحاولة حماية منطقة القوس باستخدام غازات حيث أن وجود األكسجين والنيتروجين في الغالف الجوي ،خاملة للتقليل من ظهور عيوب اللحام
وتماسه المباشر مع المعدن في منطقة اللحام قد يسبب ظهور مسامات في الوصلة الملحومة عيوب اللحام. أهم حدأيعتبر والذي
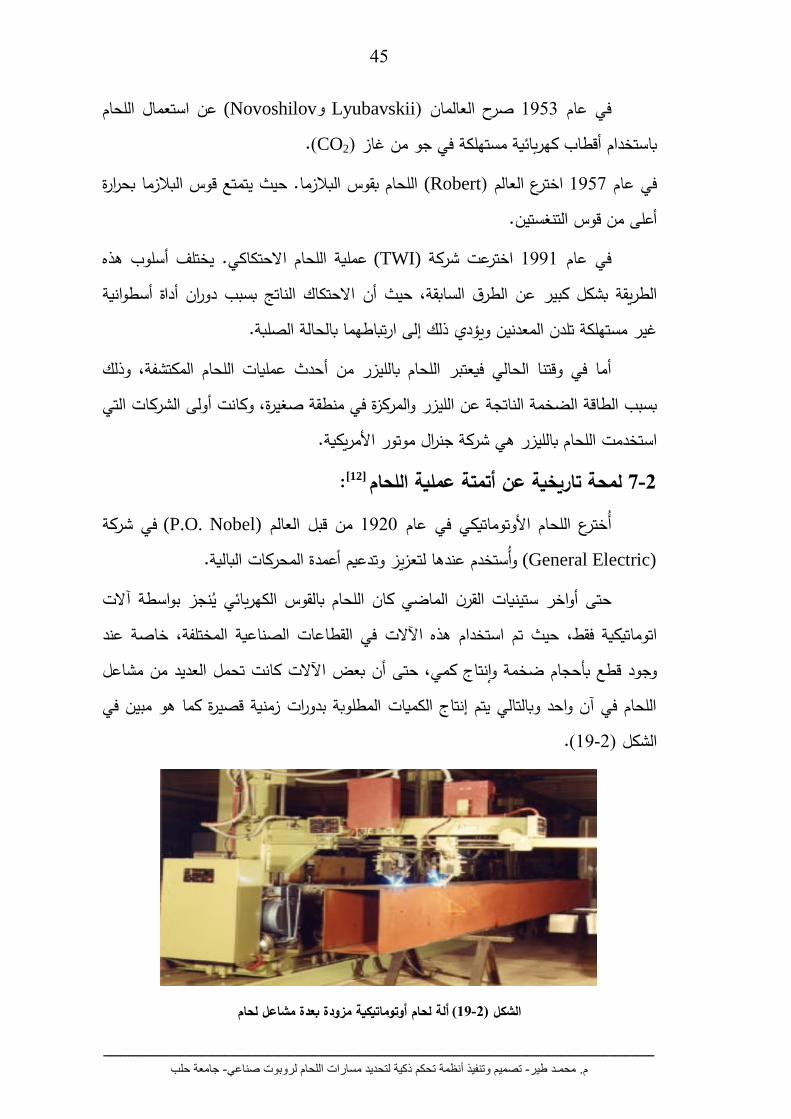
45
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
عن استعمال اللحام Novoshilov)و Lyubavskii) العالمانصرح 1953في عام .(CO2) أقطاب كهربائية مستهلكة في جو من غاز ستخداماب
اللحام بقوس البالزما. حيث يتمتع قوس البالزما بحرارة Robert))اخترع العالم 1957في عام من قوس التنغستين. أعلى
يختلف أسلوب هذه عملية اللحام االحتكاكي. (TWI)اخترعت شركة 1991في عام االحتكاك الناتج بسبب دوران أداة أسطوانية أن حيث عن الطرق السابقة، بشكل كبير الطريقة
.لك إلى ارتباطهما بالحالة الصلبةغير مستهلكة تلدن المعدنين ويؤدي ذ
وذلك ،حدث عمليات اللحام المكتشفةأمن أما في وقتنا الحالي فيعتبر اللحام بالليزر ، وكانت أولى الشركات التي والمركزة في منطقة صغيرة عن الليزر بسبب الطاقة الضخمة الناتجة
. األمريكية شركة جنرال موتورتخدمت اللحام بالليزر هي اس
: [12]اللحامعملية أتمتةلمحة تاريخية عن 2-7في شركة (P.O. Nobel)من قبل العالم 1920في عام خترع اللحام األوتوماتيكيأ
(General Electric) ستخدم عندها لتعزيز وتدعيم أعمدة المحركات البالية.أ و
ينجز بواسطة آالت اللحام بالقوس الكهربائي كانالقرن الماضي ستينيات حتى أواخرفي القطاعات الصناعية المختلفة، خاصة عند اآلالتهذه امستخدتم ا حيث ة فقط،اتوماتيكي
نتاج كمي، حتى أن بعض ضخمةم قطع بأحجا وجود كانت تحمل العديد من مشاعل اآلالت وا اللحام في آن واحد وبالتالي يتم إنتاج الكميات المطلوبة بدورات زمنية قصيرة كما هو مبين في
.(19-2)الشكل
مشاعل لحام بعدة مزودة لة لحام أوتوماتيكيةأ( 19-2)الشكل

46
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
االستعانة بالروبوتات إلىوقاد العلماء اآلالتمع تزايد اإلنتاج وتنوعه قل استعمال هذه مسبقا في عمليات نقل القطع والطالء. هاماستخدتم ا الصناعية التي
نجاز اللحام الروبوتات التي استخدمت إل تر ظهالقرن الماضي في بداية سبعينياتوالذي يعتبر مطلبا مسار مستمرتحريك مشعل اللحام على قادرة علىأنها لم تكن إال ،النقطيكمثال على خطوط اللحام النقطي الروبوتية هو خط جهز عام . للحام بالقوس الكهربائي أساسيا بواب لألنجز اللحام النقطي األمريكية لصناعة السيارات. حيث ي DODGEفي شركة 1980
. بعد هذا القسم تمر هياكل السيارات إلى خط Unimation من نوع روبوتات 8بـ ستعانةباالروبوت لحام 36هز المصنع بـ ج روبوت. 24 نقطة لحام بـ 700حيث تنجز أكثر من ،اللحام سيارة في اليوم. 1750 إلنتاج معدتجميع أجزاء هياكل السيارات وهو لنقطي
للقيام بهذه المهام له مبرراته وذلك ألن المهارة التي أبداها الروبوت الروبوت إن اختيارهذه الدقة قد ال تكون موجودة عند اإلنسان وذلك بسبب حجم من الدقة. كانت على درجة عالية
من تأتيرطل، كما أن دقة الروبوت 200إلى أحيانا ووزن مشعل اللحام الذي قد يصل وزنهتباعه نفس المسارو اعتياده على دورة محددة لكن لسوء الحظ عندما .معينة للحام بدون تغيير وا
أيام لوضع الروبوت على خط ستغرق ساعات و ن م استبدال روبوت مبرمج بآخر جديد، وقتهايت . اإلنتاج وبرمجته وفق المتطلبات المطلوبة
لروبوتات اللحام إجراء بعض التعديالت الميكانيكية وتعديل البرمجة تم 1974في عام مستمرة.مسارات لحام إنجازتصنيع أول روبوت صناعي قادر على وتم النقطي
وفيما بعد في صناعة السيارات واسعة بصورةفي البداية روبوتات اللحام أنتشر استعمالبدأ استخدام الروبوتات في مجاالت عديدة مثل صناعة اآلالت الثقيلة والمنشآت المعدنية والسكك
.لحام الشرائح اإللكترونية الدقيقةوصوال لو ديدية الح
في منتصف الثمانينات تم تصميم روبوتات لحام تملك عدة درجات حرية وتوفرت للروبوت باستخدام التوجيهتم تقديم سمة 1984عام ، ومنذ حساسات لم تكن موجودة من قبل
.مسار أثناء اللحامالرؤية لتتبع وتمييز ال

47
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:ات التسلسليةالحركي للروبوت السلوكدراسة مرجعية في مجال 2-8 ات التسلسـليةث التـي ركـزت علـى دراسـة السـلوك الحركـي للروبوتـاألبحـا بعـض يلـي سـنعرض فيما
على الشكل التالي:
Pashkevicha, Semkin, Alexandre (Byelorussia,2003) ونالباحث - [13]:
روبوتالمؤثر النهائي ل إحداثياتمصفوفات التحويل التي تربط بين ون الباحثعرض حداثياتت حرية يملك ست درجا عمليات اللحامتنفيذ مخصص ل مناول يملك درجتين حرية وا
.(20-2)كما هو مبين في الشكل لتوجيه المشغولة المراد لحامها أمام الروبوت
المشغوالتمناول ل بالنسبةوبوت ر التوضع (21-2)الشكل
مجال عمل بعين االعتبار مع األخذ حل المسألة الحركية العكسيةلمنهجية ون الباحث قدموذلك بهدف ، تكنلوجيا اللحامل الهندسية متطلباتمشغوالت والال الروبوت وموقع وتوجيه مناول
مسار األمثل إلنجاز عملية اللحام.ال والحصول علىتنسيق حركة المؤثر النهائي للروبوت
عمل ال منهجيةمخطط صندوقي ل (21-2)الشكل

48
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
قيادة أحد الروبوتات المستخدمة في مصنع لصناعة السيارات في لمقترحة ال المنهجيةتم اختبار . تهاروسيا، وأثبتت نتائج االختبار فاعلي
Calderon, Alfaro, J.Gan (UK,2006) ونالباحث - [14]:
حساب زوايا مفاصل الروبوت التي تحقق حركة حل المسألة الحركية العكسية يعني العكسي الحلالمؤثر النهائي على المسار المطلوب. توجد عدة طرق هندسية وتحليلية إلجراء
وبالتالي تحديد قيم زوايا المفاصل.
يملك خمس درجات حرية كما هو مبين في متنقل لحل المسألة الحركية العكسية لروبوت طريقتين: مقارنة بين ون الباحث عرض ،(22-2)الشكل
(Hybrid Model) هجينةالالطريقة -4 RMRC (Resolve Motion Rate Control)طريقة -3
بينهما من تمت المقارنة تجربة من أجل تتبع مسار محدد باستخدام الطريقتين و ون أجرى الباحث خالل زمن االستجابة والدقة.
درجات حريةموبايل روبوت يملك خمس (22-2)الشكل
تعتبر أكثر كفاءة من حيث زمن االستجابة مقارنة RMRCأظهرت التجارب أن طريقة .(23-2) ، ولكن تعتبر أقل كفاءة من ناحية الدقة كما هو مبين في الشكلالمختلطةمع الطريقة

49
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقارنة بين الطريقتين (23-2)الشكل
Mehul , Anurag (India,2010) انالباحث - [15]:
عبر عن العالقة المباشرة بين قيم زوايا مفاصل الروبوت المسألة الحركية األمامية ت حل المسألة الحركية األمامية منهجية انالباحث ع واتجاه المؤثر النهائي للروبوت. عرضضومو
انالباحث حددستخدم لتنفيذ عمليات اللحام بالقوس الكهربائي. لروبوت يملك ست درجات حرية ي ، (Denavit Hartenberg) قاعدةالحركية باالعتماد على لألزواج اإلحداثيةجملة المحاور ، وبالتالي لألزواج الحركية جداء المصفوفات الموسعةلببرنامج الماتالب الباحثان وأخيرا استعان
.تحديد موضع واتجاه المؤثر النهائي للروبوت
Mahidzal , Jian (Malaysia,2010) انالباحث - [16]:
لروبوت تسلسلي من نوع ةوالعكسي ةاألمامي لمسألة الحركيةحل ا آلية انالباحث عرضKuka (24-2)كما هو مبين في الشكل يملك ست درجات حرية يستخدم لتنفيذ عمليات اللحام.
لتنفيذ عمليات اللحام Kukaروبوت (24-2)الشكل

50
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لتنفيذ عملية نقطه 12مسار المؤثر النهائي للروبوت المار من كيفية توليد انالباحث عرضكما .(25-2)كما هو مبين في الشكل كتلة مع صفيحة معدنية لحام
ار المؤثر النهائي للروبوتسمتوليد (25-2)الشكل
المحاور اإلحداثية جملة تحديدل (Denavit Hartenberg) قاعدةعلى اناعتمد الباحثبالمصفوفات الموسعة لتحديد معادالت الحركة األمامية. اناستعان الباحث كما ،لكل زوج حركي
في الروبوت حساب زوايا مفاصل على الحل التحليلي الستنتاج عالقات اناعتمد الباحث وأخيرا الحركة العكسية.
Fabio,Stefano,Domenico,Francesco (Italy,2010) ون الباحث - [17]:
مكتبــة ضــمن برنــامج المــاتالب خاصــة بمحاكــاة روبــوت تسلســلي مــن نــوع ون البــاحث صــممKuka ها ميتتــم تســو يســتخدم لتنفيــذ عمليــات اللحــام يملــك ســت درجــات حريــة(KTC) كمــا هــو
بالتعـاون مــع ون . تتـألف المكتبــة مـن مجموعـة مـن التوابــع طورهـا البـاحث(26-2)مبـين فـي الشـكل السـلوك وظيفة تتعلق بدراسة 40اإليطالية بهدف تنفيذ أكثر من Sienaبعض الطلبة في جامعة
ـــة إجـــراء .لروبـــوتالحركـــي ل ـــة والعكســـية وتحركيـــة الدراســـة ال تشـــمل المكتب المســـار خطـــيطاألمامي روبوت.المؤثر النهائي للوعرض المخططات البيانية ومحاكاة فراغية لحركة
ربط الروبوت بالحاسب (26-2)الشكل

51
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المكتبة المصممة بمرونتها وسهولة ربطها مع المكتبات األخرى واألجهزة الخارجية. متازت فاعليـــة المكتبـــة المحاكـــاة ، حيـــث أثبتـــت نتـــائجعـــدد مـــن األمثلـــة بتطبيـــقالمكتبـــة ينأختبـــر البـــاحث
.المصممة
Tahseen Fadhil (Iraq,2013)لباحث ا - [18]:
جراء الدراسة الحركية األمامية رياضي موديلآلية بناء الباحث عرض تسلسـلي روبـوتل وا في كما هو مبين التعليمية لألغراض يستخدم (Lab-Volt R 5150) حرية درجات خمس يملك .(27-2) الشكل
( Lab-Volt R 5150)روبوت تعليمي (27-2)الشكل
لتحديــد جملــة المحــاور اإلحداثيــة ( Denavit Hartenberg) قاعــدةعلــى الباحــث أعتمــدلـــألزواج الحركيـــة. كمـــا اســـتخدم برنـــامج المـــاتالب لجـــداء المصـــفوفات الموســـعة، وبالتـــالي معرفـــة
محاكـاة أجـرى الباحـث موضع واتجاه المـؤثر النهـائي بنـاء علـى المواقـع اآلنيـة لمفاصـل الروبـوت. عـــدة الباحـــث نفـــذ . كمـــاماميـــةلتقيـــيم صـــحة نتـــائج الدراســـة الحركيـــة األضـــمن المـــاتالب للروبـــوت
.(mm 0.01)ع ضالمو خطأ يتجاوز لم حيث حركة المؤثر النهائي للروبوت، دقة لتقييم تجارب
Anvesh, Kumar, Srinath, Prem (India,2013) ونالباحث - [19]:
يملـك Kuka نـوع مـن تسلسـلي لروبـوت رياضـي موديـل بنـاء منهجية إلى ون الباحث تطرق ــــــذ يســــــتخدم حريــــــة درجــــــات ســــــت ــــــات ون البــــــاحث عــــــرض. اللحــــــام عمليــــــات لتنفي برنــــــامجإمكاني
Roboanalyzer حركـــــةالخاصـــــة بدراســـــة الوعـــــرض المخططـــــات الحســـــابية العمليـــــات إلجـــــراء المــؤثر لحركــةمحاكــاة عمليـة بالبرنــامج لتنفيــذ ون . كمــا اسـتعان البــاحثللروبــوت والعكســية األماميـة .منحنية لحام مسارات وفق للروبوت النهائي

52
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
A.Abbas , M.Aly (Saudi,2014) انالباحث - [20]:
تخطيط مسـار المـؤثر النهـائي على وتأثيرهلروبوت عمل ا فراغ معرفةأهمية انشرح الباحثحتــاج لعــدد ال بــأس بــه مــن العمليــات الحســابية المعقــدة يعمــل الروبــوت فــراغ تحديــدللروبــوت. إن
.(28-2)كما هو مبين في الشكل وباألخص عند وجود عقبات في منطقة العمل
عمل الروبوت في منطقة تعقباوجود (28-2)الشكل
العمــل إلــى فــراغالعمــل وأحيانــا يتسـبب بفصــل فــراغيـؤثر وجــود العقبــات علــى شـكل وحجــم . (29-2)منطقتين كما هو مبين في الشكل
بسبب تواجد العقبات عمل الروبوت إلى منطقتينفراغ فصل (29-2)الشكل
ــ ألي روبــوت تسلســلي بوجــود عقبــات العمــل فــراغتقنيــة رقميــة فعالــة لتحديــد انقــدم الباحث فــراغعمــل أكبــر مــن فــراغتعتمــد علــى افتــراض حــل. خوارزميــة الهوبغــض النظــر عــن نــوع مفاصــل
ومن ثم يتم فحص هذه النقاط هل فراغثم يتم إنشاء نقاط كثيرة داخل هذا ال ،المتوقعالفعلي العمل العمــــل فــــراغالنقــــاط تمثــــل تكــــوين شــــبكة مــــنوبالتــــالي ، أم التحقــــق معــــادالت الحركــــة العكســــية
،العمـل منطقـةفـي المتواجـدة العقبات عقع ضمن مو قتالنقاط التي استبعادفيما بعد يتم األساسي.ـــالي ـــى نحصـــلوبالت ـــادة عـــدد النقـــاط أن انباحثـــ. كمـــا أكـــد الالعمـــل النهـــائي للروبـــوت فـــراغعل زي
حصـــول علـــى نتـــائج أدق المفترضـــة يـــؤدي إلـــى زيـــادة العمليـــات الحســـابية، إال انـــه يـــؤدي إلـــى ال والعكس صحيح.

53
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
حيـث ،يؤدي دمج هـذه التقنيـة مـع برنـامج قيـادة الروبـوت إلـى زيـادة مرونـة عمـل الروبـوتعمـل جديـد لكـل عمليـة إنتاجيـة وبـاألخص عنـد تغيـر موقـع فراغعلى تحديد يصبح الروبوت قادرا
. عملهالروبوت على خط اإلنتاج وتواجد عقبات جديدة في منطقة
دراسة مرجعية في مجال تزويد الروبوتات بتقنيات الرؤية الحاسوبية: 2-9وزيادة االعتماد عليها في شتى مجاالت الحياة، ظهرت ةتينظمة الروبو األ مع تطور
التي تتعلق تلك القرارات المناسبة وخاصة اتخاذالحاجة الملحة إليجاد آلية تمكن الروبوت من العديد من ون الحاجة واجه الباحث تلكعند محاولة تلبية إال أنه بحركته ضمن البيئة المحيطة.
العقبات أهمها عدم توفر حساسات مناسبة وعدم قدرة الحساسات التقليدية على فهم البيئة المؤثر النهائي المحيطة بشكل كامل وعدم قدرتها على إعطاء المعلومات الدقيقة عن موضع
م ما خوارزميات جديدة لمساعدة الروبوت على فه بناء إلىدفع العديد من الباحثين هذا .روبوتلل .متطورةوذلك من خالل تزويده بأنظمة رؤية هحول
على الشكل على استخدام تقنيات الرؤية للروبوتات األبحاث التي ركزت بعض يلي سنعرض فيما التالي:
Volker Graefe (Germany,1995)الباحث - [21]:
الحاجة تلغيقدم الباحث مفهوم جديد للتحكم بالروبوت مبني على استخدام منظومة رؤية كما . تسمح منظومة الرؤية المؤلفة من كاميرتين اإلنتاجموقع الروبوت على خط للتنفيذ معايرة
أوامر التحكم بحركة إلىالصورة إحداثياتباالنتقال المباشر من (30-2)بين في الشكل هو م .الروبوت
كاميرتينمنظومة رؤية مؤلفة من (31-2)الشكل

54
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
أستعان الباحث بروبوت من نوع ميتسوبيشي يملك خمس درجات حرية الختبار وتقييم ، آخر إلىأداء منظومة الرؤية المصممة. يستخدم الروبوت اللتقاط ونقل قطع معدنية من موقع
القطعة المراد نقلها وتحديد موقعها ومن ثم توجيه تمييزومة الرؤية في ظتكمن مهمة من حيث المؤثر النهائي للروبوت ليلتقطها وينقلها إلى موقع محدد.
Rioux Amann, Bosch, Myllyla, (Germany,2001) ونالباحث - [22]:
التقنيات المستخدمة لقياس المسافة باالستعانة بالليزر وهي: ون عرض الباحث
.(triangulation)طريقة -4 .(pulsed time-of-flight)طريقة -3 .(phase-shift)طريقة -2 .(frequency modulated continuous wave)طريقة -1
يم أداء كل يقتم تقيود عملها ومجال استخدامها. كما وامبدأ عمل كل طريقة وناقش ون رح الباحثش طريقة من حيث الدقة والكلفة.
Andrew ,Saxena, Driemeyer (USA,2006) ونالباحث - [23]:
وخصوصا منظومة رؤية قادرة على تمييز قطع ذات أشكال غير مألوفة ون الباحث عرض .(31-2)كما هو مبين في الشكل التي يتم رؤيتها للمرة األولى
تمييز القطع ذات األشكال غير المألوفة (31-2)الشكل
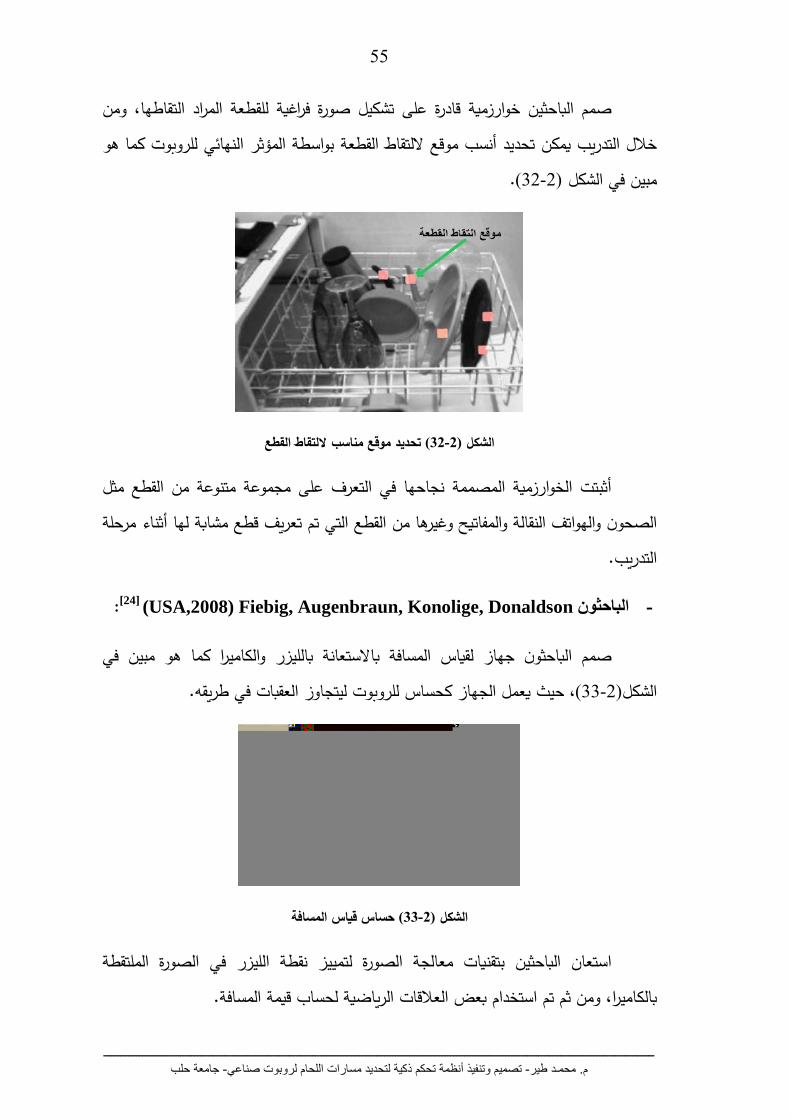
55
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
للقطعة المراد التقاطها، ومنقادرة على تشكيل صورة فراغية خوارزمية ينالباحثصمم بواسطة المؤثر النهائي للروبوت كما هو القطعة لتقاطال أنسب موقعتحديد خالل التدريب يمكن
. (32-2)مبين في الشكل
تحديد موقع مناسب اللتقاط القطع (32-2)الشكل
نجاحها في التعرف على مجموعة متنوعة من القطع مثل المصممة أثبتت الخوارزمية أثناء مرحلة لها ةقطع مشاب تعريف تمالصحون والهواتف النقالة والمفاتيح وغيرها من القطع التي
.التدريب
Fiebig, Augenbraun, Konolige, Donaldson (USA,2008) ونالباحث - [24]:
كما هو مبين في بالليزر والكاميرالقياس المسافة باالستعانة جهاز ون حثاالب صمم العقبات في طريقه. زو كحساس للروبوت ليتجا ، حيث يعمل الجهاز(33-2)الشكل
مسافة الحساس قياس (33-2)الشكل
في الصورة الملتقطة بتقنيات معالجة الصورة لتمييز نقطة الليزر ينستعان الباحثا المسافة.قيمة بعض العالقات الرياضية لحساب مااستخدتم ومن ثم بالكاميرا،
56
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وكلفة هويمتاز الجهاز بصغر حجم متر، 6سم إلى 20يتراوح بين مجال عمل الجهاز الجهاز من خالل قياس عدة مسافات دقة ون أختبر الباحث .ا دوالر 30لم تتجاوز منخفضة تصنيع
سم لمسافة مقاسة 2تجاوز تالخطأ في القياس لم نسبةمع مسافات معروفة تبين بأن بمقارنتهاو متر. 6قدرها
Shojaeipour, Harisa, Shirvana (Malaysia,2010) ونالباحث - [25]:
يمكن أن تزودليزر نقطي وكاميرة ويب منبعمن ةرؤية مؤلف منظومة ون صمم الباحثمن تحول دون وصوله لنقطة الهدف وذلك عقبات تجاوز بهدف مساعدته على متنقل روبوتل
خالل حساب المسافة بين الروبوت والحواجز.
منظومة رؤيةبموبايل روبوت تزويد (34-2)الشكل
بتقنيات معالجة الصورة المتوفرة في برنامج الماتالب لتمييز وتحديد ون استعان الباحثبعض العالقات المثلثية لحساب ون الباحث ومن ثم استخدم ،موقع نقطة الليزر في الصورة
ومقارنة النتائج مع مسافات قياس تجارب 10المسافة. كما تم اختبار المنظومة من خالل تنفيذ .(35-2) فعلية معلومة كما هو مبين في الشكل
مقارنة بين النتائج الفعلية والمقاسة (35-2)الشكل
57
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
Barnwell, Yu Sun, Agrawal, Raskar (Japan,2009) ونالباحث - [26]:
لى تمييز القطع اللتقاطها بواسطة المؤثر إتقنية رؤية متطورة تهدف ون عرض الباحثحساس مؤلف من كاميرا وثمان ديودات باعثة لإلضاءة ينالنهائي للروبوت. صمم الباحث
. (36-2)كما هو مبين في الشكل محيطة بالكاميرا )فالشات(
رؤية الآلية عمل حساس (36-2)الشكل
خوارزمية تعتمد على تقدير عمق القطعة في الصورة الملتقطة بواسطة ون قدم الباحثكما بشكل متتالي بمفردهالكاميرا من خالل تحليل ظاللها الناتجة عن تشغيل كل دايود )فالش(
.(37-2)هو مبين في الشكل
تحليل ظالل القطع (37-2)الشكل
لحساب المصممة العالقات الرياضية المستخدمة ضمن الخوارزمية ون شرح الباحث كمايتفوق هذا النوع من الحساسات على حساسات الرؤية . عمق القطعة باالعتماد على ظاللها

58
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ذا كانت إبغض النظر و المختلفة واألحجام األشكالذات التقليدية كونه قادر على تمييز القطع .المعة أوداكنة سطوحها
Jesus, Christian (Brazil,2011)انالباحث - [27]:
وكاميرة ويب يستخدم لقياس المسافات نقطي ليزر منبعجهاز مؤلف من انعرض الباحثبدقة احد أهم العوامل المؤثرة على ةيعتبر تحديد المساف ، حيث(38-2)كما هو مبين في الشكل
بناء صورة فراغية للمجسمات.
مسافة منخفض الكلفةحساس قياس (38-2)الشكل
على تم االعتمادومن ثم ،الليزر في الصورة نقطةتمييز موقع لخوارزمية انصمم الباحثلعرض النتائج GUIواجهة تفاعلية انالباحثمثلثية لحساب المسافة. كما صمم العالقات بعض ال
ورسم المخططات.
ومن ثمعلى نتائج القياس، الجهازتوضيح تأثير معايرة لبعض التجارب انالباحثأجرى تقييم بهدف مقارنة بين مسافات مقاسة بالجهاز وقياسات فعلية مقاسة يدويا مخطط للعرض تم
. (39-2)كما هو مبين في الشكل أداء الجهاز المصمم
مقارنة بين مسافات مقاسة وفعلية (39-2)الشكل
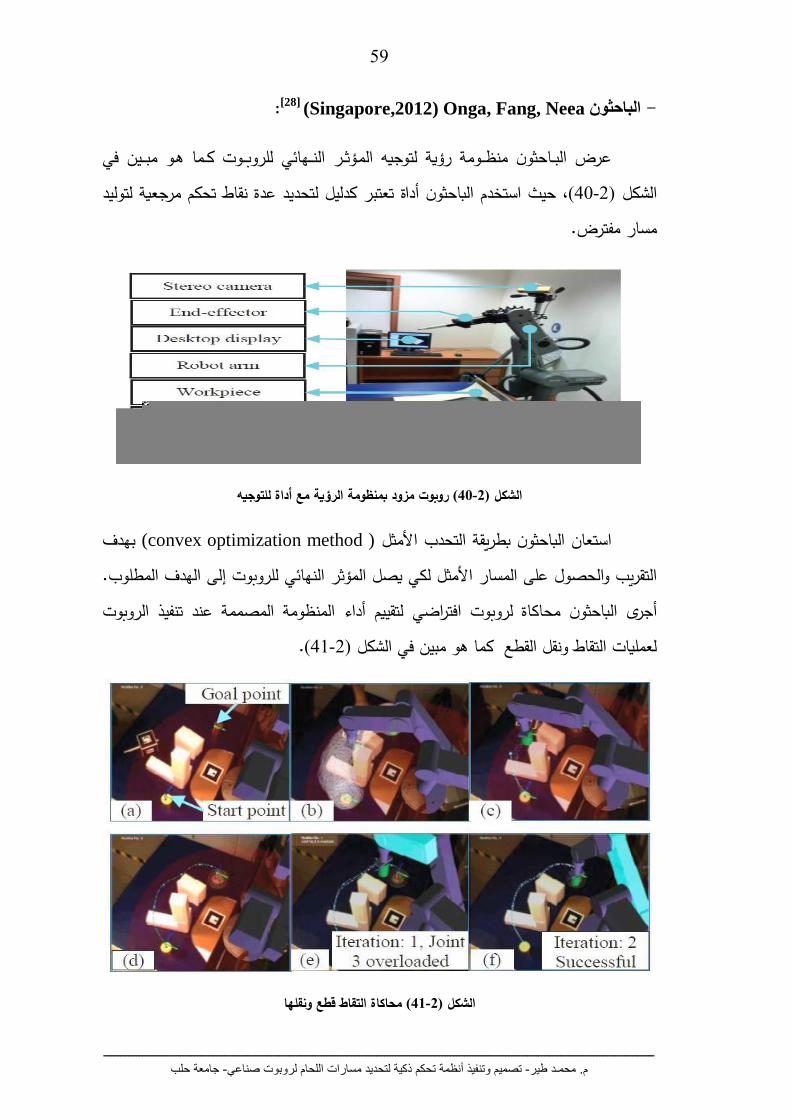
59
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
Onga, Fang, Neea (Singapore,2012) ونالباحث - [28]:
ين في ــما هـو مبـــكوت ـــللروب هائيـــر النــؤثـالم هومة رؤية لتوجيـــمنظ ون احثــعرض البتعتبر كدليل لتحديد عدة نقاط تحكم مرجعية لتوليد أداة ثون الباح استخدمحيث ،(40-2) الشكل
.مسار مفترض
لتوجيهلمنظومة الرؤية مع أداة روبوت مزود ب (41-2)الشكل
بهدف convex optimization method) ( األمثلبطريقة التحدب ون الباحثاستعان الهدف المطلوب. إلىللروبوت المؤثر النهائيصل يلكي األمثلالتقريب والحصول على المسار
لتقييم أداء المنظومة المصممة عند تنفيذ الروبوت افتراضيمحاكاة لروبوت ون الباحث أجرى .(41-2)لشكل العمليات التقاط ونقل القطع كما هو مبين في
محاكاة التقاط قطع ونقلها (41-2)الشكل

60
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
العقبات ت للروبو المؤثر النهائيجاوز يتكي لاالستعانة بها دعنالمنظومة أداء اختبار تم كما .(42-2) كما هو مبين في الشكل هأمام
محاكاة تجنب العقبات (42-2)الشكل
مسار دائري ومالحقة المؤثر النهائي للمسار إطارتحديد على لمنظومةر قدرة اااختبتم أيضا .(43-2) كما هو مبين في الشكل
محاكاة الحركة على مسار منحني (43-2)الشكل
بتطوير المنظومة لتناسب الروبوتات المستخدمة لتنفيذ عمليات الطالء ثون أوصى الباحكما والتجميع.

61
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
Yongtae Do, Jongman Kim (Korea,2013) ونالباحث - [29]:
يعتمد مبدأ عملها على IRمنظومة مؤلفة من مجموعة حساسات ون الباحث صمم .(44-2)كما هو مبين في الشكل مرتبه بشكل مصفوفيو استخدام األشعة تحت الحمراء
مرتبة بشكل مصفوفي IRحساسات (44-2)الشكل
كبديل لبعض أنظمة الرؤية بهذه المنظومة واعتبرها الروبوتاتتزويد ثون اقترح الباحمنة آالمنظومة إلى ضمان حركة هذه يهدف استخدام المعقدة والمكلفة كالماسحات الليزرية.
ومن ثم تحسس موقع ،لعقباتا تجاوزمن خالل على كامل المسار للمؤثر النهائي للروبوت .وشكل القطع المراد التقاطها
على سير ناقل كما هو ةقطع متوضعموقع وشكل عدة تحسستم اختبار المنظومة ل .(46-2)، ومن ثم تم تسجيل النتائج ضمن الجدول المبين في الشكل (45-2)مبين في الشكل
عمل منظومة الرؤيةآلية (45-2)الشكل
62
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مصممةمنظومة الالنتائج اختبار (46-2)الشكل
تعتبر غير واضحة لكنها تعتبر بالرغم من أن المعلومات ثالثية األبعاد لهذه المنظومة تجنب العقبات في طريقه.لتزويد الروبوت بمعلومات تقريبية تمكنه من كافية
Yoshimi, Harada, Kita, Nagata (Japan,2014) ونالباحث - [30]:
من ضمن معينة تمييز قطعة قادرة علىنظومة رؤية مروبوت مزود ب ون عرض الباحث .(47-2)في صندوق كما هو مبين في الشكل ةعدة قطع عشوائية متوضع
روبوت مزود بمنظومة رؤية (47-2)الشكل
.(48-2)سيارات المبينة في الشكل لل دخنةاأل خوارزمية لتمييز قطع عادمات ون صمم الباحث

63
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
عادمات األدخنة للسيارات (48-2)الشكل
تقنيات معالجة الصورة لتمييز القطعة كما هو مبين في الشكل استخدامتعتمد الخوارزمية على .(50-2)، ومن ثم تقريب شكل القطعة إلى أسطوانات متعددة كما هو مبين في الشكل(2-49)
معالجة الصورة لتمييز القطع (49-2)الشكل
متعددة أسطواناتإلى دخنةادمات األعتقريب شكل (51-2)الشكل
.(51-2) في مكان محدد كما هو مبين في الشكل ل الروبوت على التقاطها وتثبيتهافيما بعد يعم .مصممةأثبتت التجارب فاعلية النهج المتبع لتمييز القطع والتقاطها ودقة منظومة الرؤية ال
تثبيت القطع في مكانها الصحيح (51-2)الشكل

64
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
دراسة مرجعية في مجال تزويد روبوتات اللحام بتقنيات الرؤية الحاسوبية: 2-11أدى التطور في الصناعة وارتفاع شدة المنافسة بين المصانع إلى ضرورة تسريع عجلة
بشكل مستمر من خالل تنويعها وتصنيع أعداد قليلة من منتج معين المنتجات اإلنتاج وتطوير استخدام روبوتات اللحام التقليدية لتنفيذ عمليات إنخر مطور. آإلى نموذج نتقالاالومن ثم ن عملية ضبط ، نظرا ألمن القطع المتشابهة يعتبر أمر غير مجدي لكمية محدودةاللحام
إلى ضرورة البحث عن حلول نية ال بأس بها. هذا ما دعا حتاج لفترة زميالروبوت ورسم القطع لإلنتاج الكمي ، وبالتالي ال يقتصر استخدامها العمل لتتأقلم مع ديناميكية لتطوير روبوتات اللحام
فقط.
على بتقنيات الرؤية روبوتات اللحام تزويدعلى األبحاث التي ركزت بعض يلي سنعرض فيما الشكل التالي:
Yong Lim, Marcelo, Wei Lin (Singapore,1999) ونلباحثا - [31]:
ن أ. كما جدا أمر معقد الضخمة عملية اللحام إلنجاز لحام هياكل السفن أتمتةتعتبر ألن هياكل السفن حجمها ، تلك العمليات يعتبر محدودا إلنجاز التقليدية استخدام روبوتات اللحام
قترحا ذلكن مواقعها تكون غير محددة. لمعالجة أكما غير قياسية وكميتها قليلة، وأشكالهاكبير ام ـار اللحــتطوير روبوتات اللحام من خالل تزويدها بمنظومة رؤية قادرة على تمييز مس ون الباحث .(52-2) ين في الشكلــكما هو مب امـار من قبل عامل اللحـسوت على المـدريب الروبــأثناء ت
السفن الضخمة هياكلتدريب الروبوت للحام (52-2)الشكل
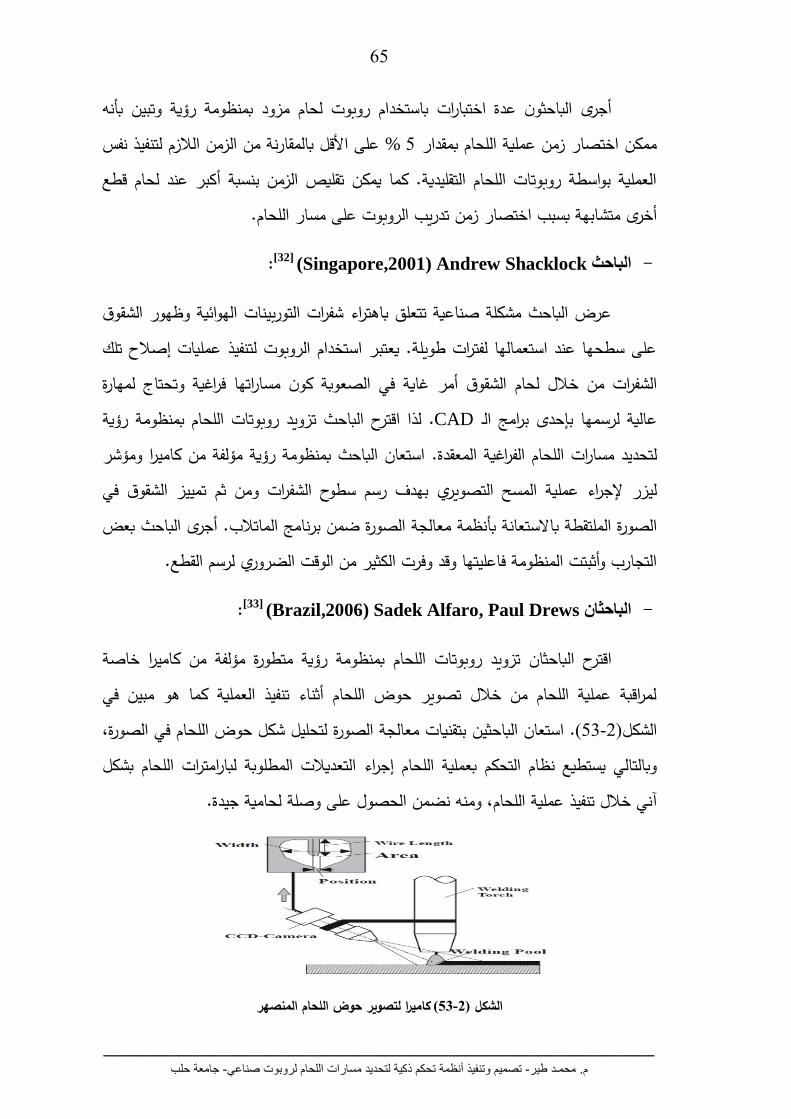
65
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بمنظومة رؤية وتبين بأنه مزودروبوت لحام باستخدام عدة اختبارات ون أجرى الباحثعلى األقل بالمقارنة من الزمن الالزم لتنفيذ نفس % 5لحام بمقدار الممكن اختصار زمن عملية
كبر عند لحام قطع أالعملية بواسطة روبوتات اللحام التقليدية. كما يمكن تقليص الزمن بنسبة تدريب الروبوت على مسار اللحام. زمن اختصارأخرى متشابهة بسبب
Andrew Shacklock (Singapore,2001)لباحث ا - [32]:
شفرات التوربينات الهوائية وظهور الشقوق هتراءابعرض الباحث مشكلة صناعية تتعلق على سطحها عند استعمالها لفترات طويلة. يعتبر استخدام الروبوت لتنفيذ عمليات إصالح تلك
غاية في الصعوبة كون مساراتها فراغية وتحتاج لمهارة الشفرات من خالل لحام الشقوق أمر الباحث تزويد روبوتات اللحام بمنظومة رؤية قترحالذا . CADبإحدى برامج الـ عالية لرسمها
استعان الباحث بمنظومة رؤية مؤلفة من كاميرا ومؤشر تحديد مسارات اللحام الفراغية المعقدة. لفي الشقوق ليزر إلجراء عملية المسح التصويري بهدف رسم سطوح الشفرات ومن ثم تمييز
الستعانة بأنظمة معالجة الصورة ضمن برنامج الماتالب. أجرى الباحث بعض الصورة الملتقطة با الضروري لرسم القطع.التجارب وأثبتت المنظومة فاعليتها وقد وفرت الكثير من الوقت
Sadek Alfaro, Paul Drews (Brazil,2006) انلباحثا - [33]:
كاميرا خاصة من مؤلفةلحام بمنظومة رؤية متطورة ال اتتزويد روبوت انالباحث قترحالمراقبة عملية اللحام من خالل تصوير حوض اللحام أثناء تنفيذ العملية كما هو مبين في
لتحليل شكل حوض اللحام في الصورة، بتقنيات معالجة الصورة ينالباحث ستعانا .(53-2)الشكلبارامترات اللحام بشكل لالتعديالت المطلوبة إجراء بعملية اللحام وبالتالي يستطيع نظام التحكم
من الحصول على وصلة لحامية جيدة.نضمنه و ، عملية اللحامخالل تنفيذ آني
لتصوير حوض اللحام المنصهر كاميرا (53-2)الشكل

66
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لتحديد أبعاد الوصلة اللحامية وقادر على ضبط ليزري ماسحالروبوت ب انلباحثكما زود ا .اللحامية مشعل اللحام والمشغولة على طول الوصلة االرتفاع بين
يعتمد على قدرته على تلقي المعلومات اللحامأن نجاح نظام التحكم بعملية انبين الباحث، ومن ثم اتخاذ (54-2)القادمة من جميع الحساسات في الوقت ذاته كما هو مبين في الشكل
سرعة حركة المشعل( بشكل مباشر -الجهد-ار)التي اللحام بارامتراتارات المناسبة لضبط القر خالل تنفيذ العملية.
آلية عمل منظومة الرؤية (54-2)الشكل
Peiquan, Tang, Shun Yao (China,2007) ونالباحث - [34]:
منظومة رؤية يمكن دمجها مع نظام التحكم بروبوت اللحام كما هو مبين ون الباحث قدمتتبع مسار اللحام خالل عملية اللحام وبالتالي تقليل قيمة الخطأ ، وذلك بهدف (55-2)في الشكل
الناتجة عن انحراف المؤثر النهائي للروبوت.
دمج منظومة الرؤية مع نظام التحكم بالروبوت (55-2)الشكل
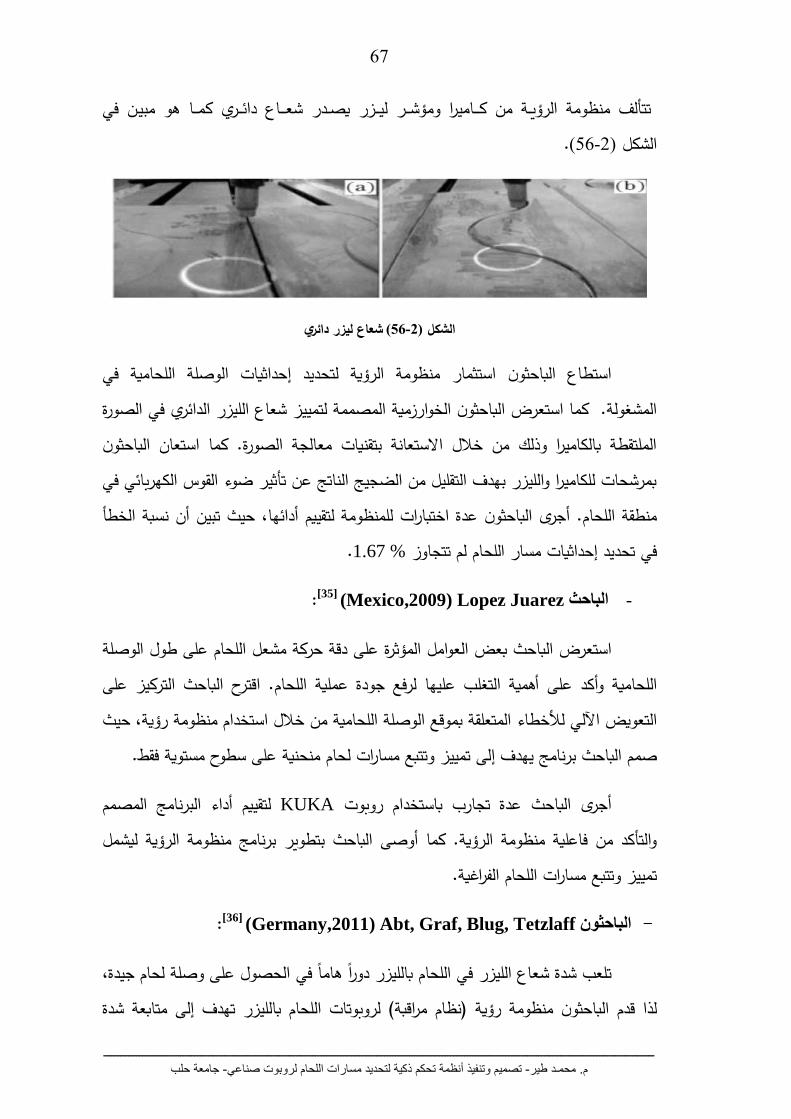
67
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
في ن ـا هو مبيـــري كمـــاع دائــــدر شعــزر يصـــر ليـــاميرا ومؤشــــة من كــمنظومة الرؤي ألفتت . (56-2) الشكل
شعاع ليزر دائري (56-2)الشكل
لوصلة اللحامية في ااستثمار منظومة الرؤية لتحديد إحداثيات ثون استطاع الباحالخوارزمية المصممة لتمييز شعاع الليزر الدائري في الصورة ون المشغولة. كما استعرض الباحث
ون استعان الباحثكما الملتقطة بالكاميرا وذلك من خالل االستعانة بتقنيات معالجة الصورة. بمرشحات للكاميرا والليزر بهدف التقليل من الضجيج الناتج عن تأثير ضوء القوس الكهربائي في
نسبة الخطأ حيث تبين أن لتقييم أدائها،للمنظومة عدة اختبارات ون منطقة اللحام. أجرى الباحث .% 1.67لم تتجاوز مسار اللحام إحداثياتفي تحديد
Lopez Juarez (Mexico,2009)الباحث - [35]:
على دقة حركة مشعل اللحام على طول الوصلة المؤثرةالعوامل بعضالباحث استعرضالتركيز على الباحث . اقترحلرفع جودة عملية اللحام يهاأهمية التغلب علأكد على و اللحامية
، حيثلي لألخطاء المتعلقة بموقع الوصلة اللحامية من خالل استخدام منظومة رؤيةالتعويض اآل على سطوح مستوية فقط.منحنية مسارات لحام تتبعتمييز و إلىبرنامج يهدف صمم الباحث
لتقييم أداء البرنامج المصمم KUKAعدة تجارب باستخدام روبوت الباحث أجرى شمل يبرنامج منظومة الرؤية ل أوصى الباحث بتطوير كماوالتأكد من فاعلية منظومة الرؤية.
مسارات اللحام الفراغية. تتبعتمييز و
Abt, Graf, Blug, Tetzlaff (Germany,2011) ونلباحثا - [36]:
، الحصول على وصلة لحام جيدةفي ا امه دورا في اللحام بالليزر الليزر شعاع شدة تلعب متابعة شدة إلى هدفلروبوتات اللحام بالليزر ت)نظام مراقبة( منظومة رؤية ون الباحث قدم لذا

68
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وبالتالي ضمان استقرار عملية اللحام تحت ،المراد لحامها مشغولةالمسلط على ال شعاع الليزر FPH (Full Penetration Hole)خاصية الصورة ونالباحثم استخد .شروط لحام متغيرة
فيها الليزر يسلطالتي تقع خلف المنطقة الساطعة التي المنطقة المظلمة الليزر فيشعاع لمراقبة الليزر شعاع معالجة الصورة يمكن تمييز تباين شدة تقنياتاالستعانة ببو ، على منطقة العمل
.(57-2)كما هو مبين في الشكل المنبعث
شدة شعاع الليزر مراقبةآلية (57-2)الشكل
Galetto, Astanin, Antonelli (Italy,2013) ونالباحث - [37]:
دون لحامالمسار تحديد إحداثياتيهدف إلى روبوت لاتدريب ل أسلوب ون الباحث عرضذلك من خالل االستعانة بمنظومة رؤية مؤلفة تم تحقيق. CAD الحاجة لرسمة بإحدى برامج الـ
. (58-2)كما هو مبين في الشكل IR ليداتومجموعة IRمن كاميرا
IRليدات ومجموعة IRكاميرا (58-2)الشكل

69
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
على طول ويحركهاتتمثل مهمة منظومة الرؤية في تتبع حركة أداة يحملها عامل اللحام .(59-2)كما هو مبين في الشكل الوصلة اللحامية
آلية عمل منظومة الرؤية (59-2)الشكل
إلغاءعلى طول المسار ومن ثم األداة حركة إحداثياتخوارزمية لتسجيل ون صمم الباحث . توليد المسار النهائي الذي يمثل مسار اللحام المطلوب وأخيرا ، المتطرفة مواقع األداة
Fuentes, Mamani, Landa (Chile,2014) ونالباحث - [38]:
وبالتالي ، لحامالمسار يهدف إلى تحديد إحداثياتروبوت التدريب أسلوب ل ون الباحث قدمتم االستعانة بمنظومة رؤية . CADـ المراد لحامها بإحدى برامج ال مشغوالتاختصار زمن رسم ال
خوارزمية ون صمم الباحث .(60-2)لتتبع حركة ذراع عامل اللحام كما هو مبين في الشكل يمر من كافة ومن ثم توليد مسار من النقاط على طول وصلة اللحام،عدد لتسجيل إحداثيات
، لحام ال يعد كافيا لتحديد المسارعلى أن تدريب الروبوت على مسار ال ون كد الباحثأ. تلك النقاط ل وصلة اللحام.لذا البد من تزويد الروبوت بحساس لضبط ارتفاع مشعل اللحام على طو
منظومة رؤية لتتبع حركة ذراع عامل اللحام (61-2)الشكل

70
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الخالصة: 2-11
دراسة السلوك الحركي ركزت علىالتي ون أعمال الباحثبعض عرضفي هذا الفصل تم في مجال تزويد الروبوتات بأنظمة الرؤية األفكار من العديد ون الباحث حاقتر كما للروبوتات. كما يلي:على األبحاث بعض المالحظات سجلنا قد و ،الحاسوبية
معظم ابتكارات الدول العربية في مجال صناعة الروبوتات لم تتطرق إلى صناعة الروبوتات - .الصناعية وباألخص روبوتات اللحام، إنما اكتفى الجميع بتصنيع الروبوتات الخدمية
،في الحركة العكسيةزوايا مفاصل الروبوت قيم طرق جديدة لحساب ون يعرض الباحثلم -نما اكتفى الجميع باالستعانة بالطرق الهندسية التقليدية المعروفة.العددية أو الطرق وا
نما اكتفت بعرض ،ستنتاج فراغ عمل روبوت تسلسليامنهجية شرحمعظم األبحاث لم ت - وا فراغ العمل النهائي للروبوت.
ل العديد من الباحثين وتم الوصول المستقيمة تمت دراسته من قب مسارات اللحامنظام تتبع -على تتبع مسارات كثيرا في حين لم يركز الباحثون إلى إنجازات معتبرة في هذا المجال،
الفراغية.اللحام مسار اللحام معظم الشركات المصنعة لروبوتات اللحام ركزت على تطوير منظومات لتتبع -
، ولم تهتم بتبسيط آلية تحديد المسار دون الحاجة لرسمه بإحدى أثناء تنفيذ عملية اللحام .CADبرامج
.منظومة الرؤية على نتائج عملها تأثير معايرة إلى ون الباحث يتطرق لم -لتتبع مسار اللحام تعتبر ذات كلفة مرتفعة ومعظم األبحاث لم المستخدمةغالبية الحساسات -
تعرض خوارزمية عملها.
71
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الفصل الثالث الدراسة الحركية للروبوت
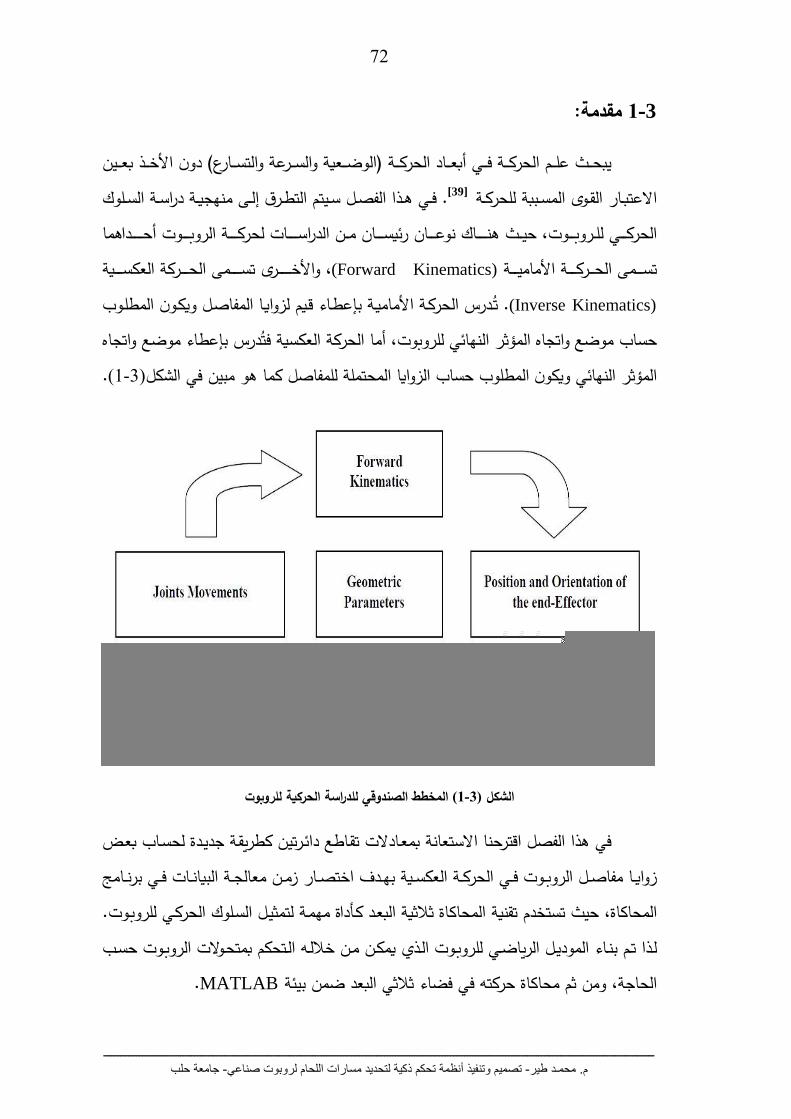
72
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة: 3-1
والســـرعة والتســـارع( دون األخـــذ بعـــين لحركـــة فـــي أبعـــاد الحركـــة )الوضـــعيةيبحـــث علـــم ادراســة الســلوك ســيتم التطــرق إلــى منهجيــة فــي هــذا الفصــل . [39]لحركــةالمســببة لاالعتبــار القــوى
ــــالحرك ــــروبــي للـ ـــهنوت، حيـــث ـ ــــاك نوعـــــ ــــان رئيســ ــــدراسالان مـــن ــ ــــحركات لــــ ــــة الروبـــ ــــوت أحــ داهما ـــــ يةـــــــركة العكســـــــالح ىمـــــــــرى تســـــــــــواألخ، (Forward Kinematics)ة ــــــة األماميـــــــركــــالح ىمـــــتس
(Inverse Kinematics) تـدرس الحركـة األماميـة بإعطـاء قـيم لزوايـا المفاصـل ويكـون المطلـوب .تجاه ا، أما الحركة العكسية فتدرس بإعطاء موضع و للروبوت موضع واتجاه المؤثر النهائي حساب
.(1-3)كما هو مبين في الشكل لمؤثر النهائي ويكون المطلوب حساب الزوايا المحتملة للمفاصلا
للروبوت المخطط الصندوقي للدراسة الحركية (1-3) الشكل
لحسـاب بعـض جديـدةكطريقـة بمعـادالت تقـاطع دائـرتيناالستعانة في هذا الفصل اقترحنا فــي برنــامج اختصــار زمــن معالجــة البيانــاتبهــدف زوايــا مفاصــل الروبــوت فــي الحركــة العكســية
.لروبـوتلالمحاكاة ثالثية البعـد كـأداة مهمـة لتمثيـل السـلوك الحركـي خدم تقنية تست، حيث المحاكاةحســب الروبــوت بمتحــوالت الــتحكم يمكــن مــن خاللــهللروبــوت الــذي رياضــي الموديــل ال بنــاءلـذا تــم .MATLAB بيئة ي فضاء ثالثي البعد ضمنف تهومن ثم محاكاة حرك ،الحاجة

73
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:المدروس الروبوتبنية 3-2
يملك خمس درجات حرية روبوت لبحثنافقد اخترنا (2-3)الشكل هو مبين فيكما تتكون البنية اإلنشائية للروبوت من سلسلة مفتوحة من .عمليات اللحامتنفيذ يستخدم في
التي تتصل مع بعضها البعض بشكل متسلسل من خالل المفاصل. وبشكل (األذرع) الوصالتإلى قاعدة 0رقم وصلةشير الت، حيث 4 وحتى الرقم 0 ترقم من الوصالتاصطالحي فإن
بشكل مشابه فإن المفاصل ترقم ، و للروبوتالمؤثر النهائي إلى 4رقم الوصلةشير تالروبوت فيما .5وحتى الرقم 1 من الرقم
درجات حرية 5يملك لحام روبوت (2-3) الشكل
هي الثوابت الحركية للوصلة تتميز بثوابتها الديناميكية والحركية. جزء صلب هيوصلة الالكتلة ومركز الثقل هيف الثوابت الديناميكية للوصلة، أما الطول والزاوية بين محوري نهايتيها
وعزم العطالة.
بحركة دورانية لوصالت قوم اجميع مفاصل هذا الروبوت هي من النوع الدوراني أي ت بالقيم لهادوران يرمز في المفاصل الدورانية تمثل بزاوية إحداثيات الوصالت .بالنسبة لألخرى
[ ].
الزوج الحركي عن درجة حرية ويعبر زوجا حركيا ، وصلتين متصلتين بمفصل كل شكلتبحيث يستطيع حرية الدرجات معين من عدد يملكروبوت يجب أن تصميم العند .واحدة
(4-2الشكل )

74
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كلما زاد تعقيد كلما ازدادت عدد درجات الحرية للروبوتالغرض المطلوب منه. الروبوت أداء كلفة تصنيع ترتفعوبالتالي ، اتمشفر وال اتمحركالتحكم بالروبوت بسبب ازدياد عدد ال خوارزميات .الروبوت
: [40]المتجانسة المصفوفاتباستخدام اإلحداثيةالتحويالت 3-3
هـو يعتبر استخدام المصفوفات إلجراء أي تحويل انتقالي أو دوراني لجملة محاور محددة المحاكــاة باســتخدام الحاســب، إذ يمكننــا التعبيــر عــن أي عمليــة حجــر األســاس للعديــد مــن مفــاهيم
فـي ممثـل تحويل من خالل جملة المحاور والمصفوفات المتعلقة بها. إذا افترضنا وجـود شـعاع .(3-3)في الشكل هو مبين كما اإلحداثية جملة المحاور
منسوبه لجملة المحاور الشعاع مركبات (3-3) الشكل
إذن:
3
بشكل مصفوفي: (1-3)ة وبكتابة العالق
[ ] [
]
العالقة التالية:شكل جداء شعاعي سلمي كما هو مبين في ب ةالسابق ةا يمكننا كتابة العالقكم
[ ] [ ] 3
حيث:
[ ] [ ]

75
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[ ] [ ]
كمـا أخرى، ولتكن إحداثية في جملة محاور بنفس الطريقة يمكننا تمثيل الشعاع وبنفس المفاهيم السابقة يمكننا أن نكتب: (4-3) الشكل هو موضح في
[ ] [ ] 3 3
لجملة المحاور همنسوب الشعاع مركبات (4-3) الشكل
يمكننا أن نكتب: (3-3)و (2-3) من المعادلتين
[ ] [ ] [ ] [ ] 3
على: نحصل [ ] بشعاع أشعة الواحدة (4-3) بضرب طرفي المعادلة
[ ] [ ] [ ] [ ] [ ] [ ]
حيث:
[ ] [ ] [
] [ ] [
] [
]
[ ] [ ] [
] [ ] [
] 3
. بمصـفوفة الــدوران ونرمــز لهــا بــالرمز (3-5)المعادلــة عــننـدعو المصــفوفة الناتجــة ـــة اإلحـــداثيات ال بالتـــالي لتمثيـــل الشـــعاع ـــة اإلحـــداثيات معـــرف ضـــمن جمل فـــي جمل
كما يلي: بمصفوفة الدوران نضرب الشعاع

76
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
3
نحصل على المحاور حول المحور αبزاوية جل دوران المحاور اإلحداثية أمن :هي وتكون مصفوفة التحويل )الدوران( اإلحداثية
[ α α α α
] 3
الجداء الداخلي يساوي طويلة األول في هو جداء داخلي ) ةمع العلم أن جداء األشعة الواحدي واألشعة الواحدية طويلتها تساوي الواحد(.، ة الثاني في تجيب الزاوية بينهماطويل
(
)
(
)
نحصل حول المحور βبزاوية جل دوران المحاور اإلحداثية أبنفس الطريقة من وتكون مصفوفة التحويل )الدوران(: على المحاور االحداثية
[ β β
β β] 3
نحصل على المحاور حول المحور γبزاوية جل دوران المحاور اإلحداثيةأمن و وتكون مصفوفة التحويل )الدوران(: االحداثية
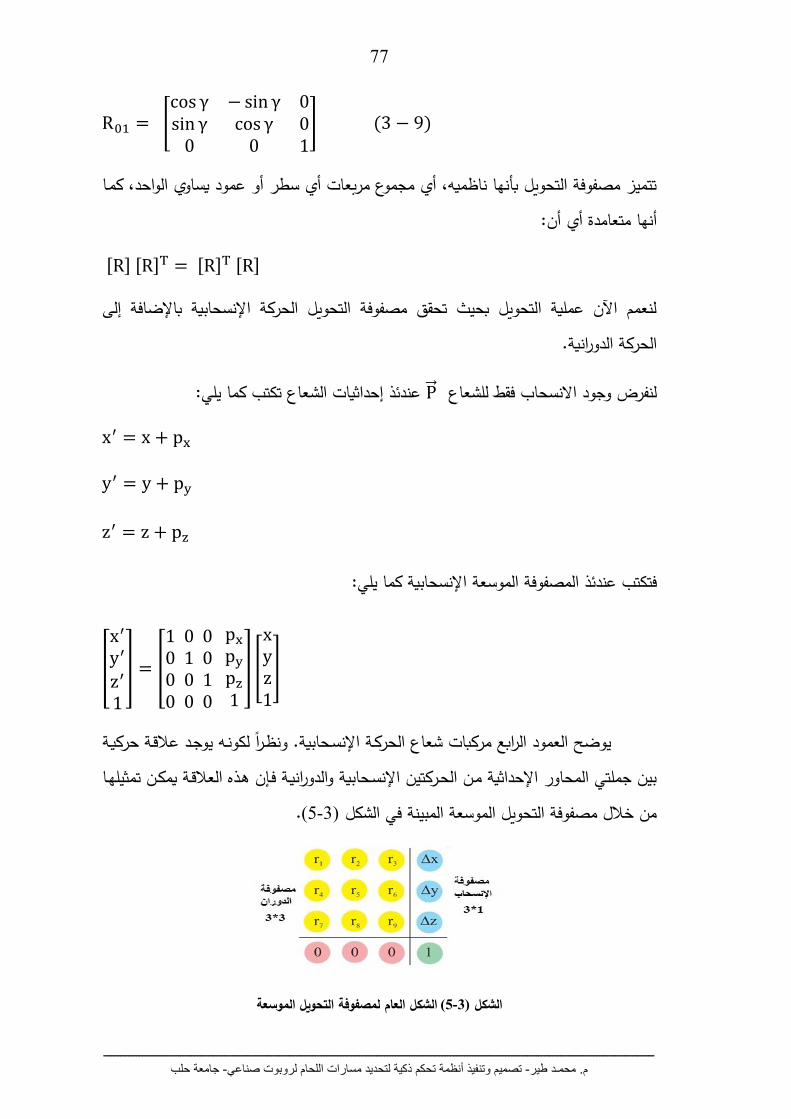
77
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[ γ γ γ γ
] 3
، كمـا عمود يساوي الواحدتتميز مصفوفة التحويل بأنها ناظميه، أي مجموع مربعات أي سطر أو ن:متعامدة أي أأنها
[ ] [ ] [ ] [ ]
نسحابية باإلضافة إلى لنعمم اآلن عملية التحويل بحيث تحقق مصفوفة التحويل الحركة اإل الحركة الدورانية.
عندئذ إحداثيات الشعاع تكتب كما يلي: لنفرض وجود االنسحاب فقط للشعاع
:كما يلينسحابية فتكتب عندئذ المصفوفة الموسعة اإل
[
] [
] [
]
لكونـه يوجـد عالقـة حركيـة ونظـرا نسـحابية. يوضح العمود الرابع مركبات شعاع الحركـة اإلنسـحابية والدورانيـة فـإن هـذه العالقـة يمكـن تمثيلهـا بين جملتي المحاور اإلحداثية مـن الحـركتين اإل
.(5-3) من خالل مصفوفة التحويل الموسعة المبينة في الشكل
لمصفوفة التحويل الموسعةالشكل العام (5-3) الشكل

78
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:هي المصفوفة الموسعة للحركة الدورانية فقط حول المحور فإن لذلك
[
] [
α α
α α
] [
]
:هي المصفوفة الموسعة للحركة الدورانية فقط حول المحور فإن وبنفس الطريقة
[
] [
β
β
β
β
] [
]
:هي والمصفوفة الموسعة للحركة الدورانية فقط حول المحور
[
] [
γ γ
γ γ
] [
]
نتيجة حركة معينة بالنسبة للنقطة المرجعية )نقطة تثبيت لمؤثر النهائيلمعرفة إحداثيات ابعض بسنضرب المصفوفات الموسعة بعضها لروبوت يملك خمس درجات حرية الذراع اآللية(
.حتى نحصل على النتيجة المطلوبة وذلك حسب حركة ذراع الروبوت
3
.لكل زوج حركي موسعةالمصفوفات الهي حيث :
:ةيجب مالحظة أن عملية ضرب المصفوفات الموسعة عملية غير تبديلي
:Denavit – Hartenberg [41] قاعدة 3-4
قاعـــدةجـــراء الفعـــال لحســـاب التوابـــع الحركيـــة ألي روبـــوت يعتمـــد علـــى مـــا يعـــرف بإن اإل(Denavit–Hartenberg) حــــاالت التــــي للتســــتخدم هــــذه الطريقــــة . م1955عــــام ابتكــــر ذيوالــــ
المحاور اإلحداثية بشكل مباشر. ةتحديد جمل فيها يصعب
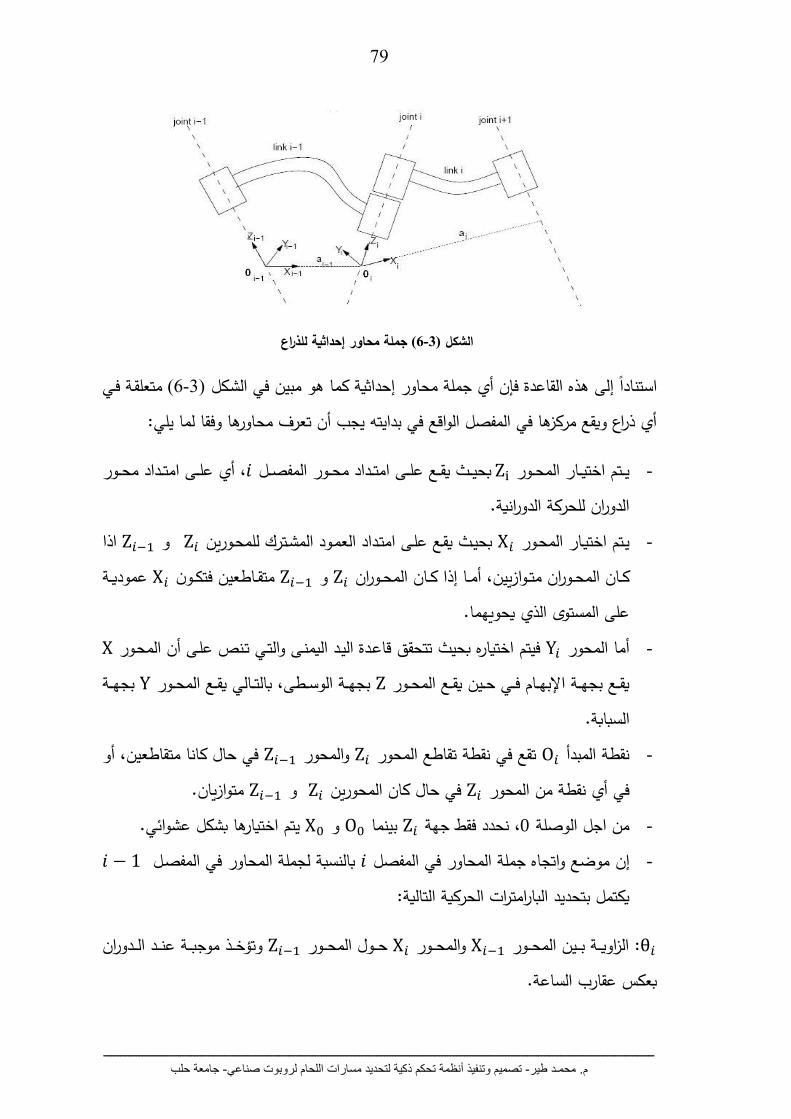
79
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
جملة محاور إحداثية للذراع (6-3) الشكل
متعلقـة فـي (6-3) الشـكلكما هو مبين في فإن أي جملة محاور إحداثية ه القاعدةإلى هذ استنادا أي ذراع ويقع مركزها في المفصل الواقع في بدايته يجب أن تعرف محاورها وفقا لما يلي:
أي علـــى امتـــداد محـــور ، بحيـــث يقـــع علـــى امتـــداد محـــور المفصـــل يـــتم اختيـــار المحـــور - الدوران للحركة الدورانية.
اذا و بحيــث يقــع علـى امتــداد العمـود المشــترك للمحــورين يـتم اختيــار المحـور -عموديــة فتكــون متقــاطعين و نان، أمــا إذا كــان المحــور ين متــوازياكــان المحــور
. على المستوى الذي يحويهما المحـورفيتم اختياره بحيث تتحقق قاعـدة اليـد اليمنـى والتـي تـنص علـى أن أما المحور -
بجهـــة بجهـــة الوســـطى، بالتـــالي يقـــع المحـــور يقـــع بجهـــة اإلبهـــام فـــي حـــين يقـــع المحـــور .السبابة
أو ،في حال كانا متقاطعين والمحور تقع في نقطة تقاطع المحور نقطة المبدأ - متوازيان. و في حال كان المحورين في أي نقطة من المحور
.يتم اختيارها بشكل عشوائي و بينما نحدد فقط جهة ،0 من اجل الوصلة -
بالنسبة لجملة المحاور في المفصـل موضع واتجاه جملة المحاور في المفصلإن - يكتمل بتحديد البارامترات الحركية التالية:
ـــين المحـــور : ـــة ب ـــدوران حـــول المحـــور والمحـــور الزاوي ـــد ال ـــة عن وتؤخـــذ موجب بعكس عقارب الساعة.

80
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
. على امتداد و : المسافة بين
. على امتداد و : المسافة بين
α وتؤخـذ موجبـة عنـد الـدوران بعكــس حـول المحـور والمحـور : الزاويـة بـين المحـور عقارب الساعة.
دائما يملكان قيم ثابتة ويعتمـدان فقـط علـى من البارامترات األربعة α متريناإن بار فهمــا متغيــران ويعتمــدان ن االمتبقيــ انمتر االبــار أمــا،كيفيــة الــربط بــين المفاصــل المتتاليــة فـإن المتغيـر ، أي انه إذا دار المفصـل بالوصلة على نوع المفصل الذي يربط الوصلة
. فإن المتغير هو أما إذا انزلق المفصل ، هو
الى الجملة في هذه الحالة أصبح من الممكن التعبير عن إحداثيات االنتقال من الجملة :بالتعويض بمصفوفة التحويل الكلية كما يلي
[
] 3
:ماميةالمسألة الحركية األ 3-5
تشمل تحديد العالقة بين متغيرات المفاصل وموضع األمامية للروبوتالمسألة الحركية لدينا إحداثيات كل ذراع من ا حيث يكون معلوم بالنسبة لقاعدة الروبوت.المؤثر النهائي واتجاه
يتم حلللروبوت. المؤثر النهائيأذرع الروبوت )موضع واتجاه( ومنها ننطلق لمعرفة إحداثيات والقاعدة وذلك بإيجاد المؤثر النهائيبين الكلية إيجاد مصفوفة التحويلب األمامية المسألةالمؤثر النهائي، ومن ثم انطالقا من القاعدة ووصوال إلى حركيفوفات التحويل لكل زوج مص
.المؤثر النهائي للروبوتواتجاه ضعمو نحصل على مفصللكل بزاوية الدورانتعويض الب
:الرياضي للروبوت النموذجبناء 3-5-1
تــتحكم بحركــة دورانيــة مفاصــل خمســةو أذرع خمســةيتكــون الروبــوت موضــع الدراســة مــن . للمؤثر النهائي للروبوتفراغية ثالثية البعد

81
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تمثيل تخطيطي للروبوت (7-3) الشكل
قاعـــدة لـــىع اعتمـــادالكـــل زوج حركـــي فـــي الروبـــوت حـــدد المحـــاور اإلحداثيـــة نفـــي البدايـــة (Denavit–Hartenberg) مترات لكـل االـذي يظهـر البـار (1-3)يمكننا تشكيل الجدول ، ومن ثم
:كما يلي خمسةالوصالت المن
للروبوت خمسةلبارامترات الوصالت ا (1-3) جدول
𝛂 Link
+90 0 1
0 0 2
+90 0 0 3
-90 0 4
0 0 5
ــــــــــــــــــــــــــــارامترات أننالحــــــــــــــــــــــــــــظ ــــــــــــــــــــــــــــرةالب ــــــــــــــــــــــــــــةخمــــــــــــــــــــــــــــس هــــــــــــــــــــــــــــي المتغي ــــــــــــــــــــــــــــا دوراني زواي
ثابتة.تكون قيمتها والبارامترات األخرى
نتيجـة حركـة معينـة بالنسـبة لنقطـة مرجعيـة )نقطـة تثبيـت مؤثر النهـائيلمعرفة إحداثيات ال الخاصة بكل زوج حركي كما يلي:تحديد المصفوفات الموسعة أوال الذراع اآللية( البد

82
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[
]
ضـرب المصـفوفات الموسـعة لتبسيط الحل صممنا برنـامج ضـمن المـاتالب لالمــؤثر عضــمو (لــألذرع الــثالث األولــى مصــفوفة التحويــل وبالتــالي نحصــل علــىبعض بــبعضــها :(النهائي
[
] [
] [
]
[
] 3
:حيث
الالزمة بعض نحصل على مصفوفة التحويلببعضها بضرب المصفوفات الموسعةو لمؤثر النهائي:لتحديد اتجاه ا
[
] [
]
[
] 3 3
:نحصل على مصفوفة التحويل الكلية للروبوت (13-3)( و(12-3 وبضرب المصفوفات الموسعة
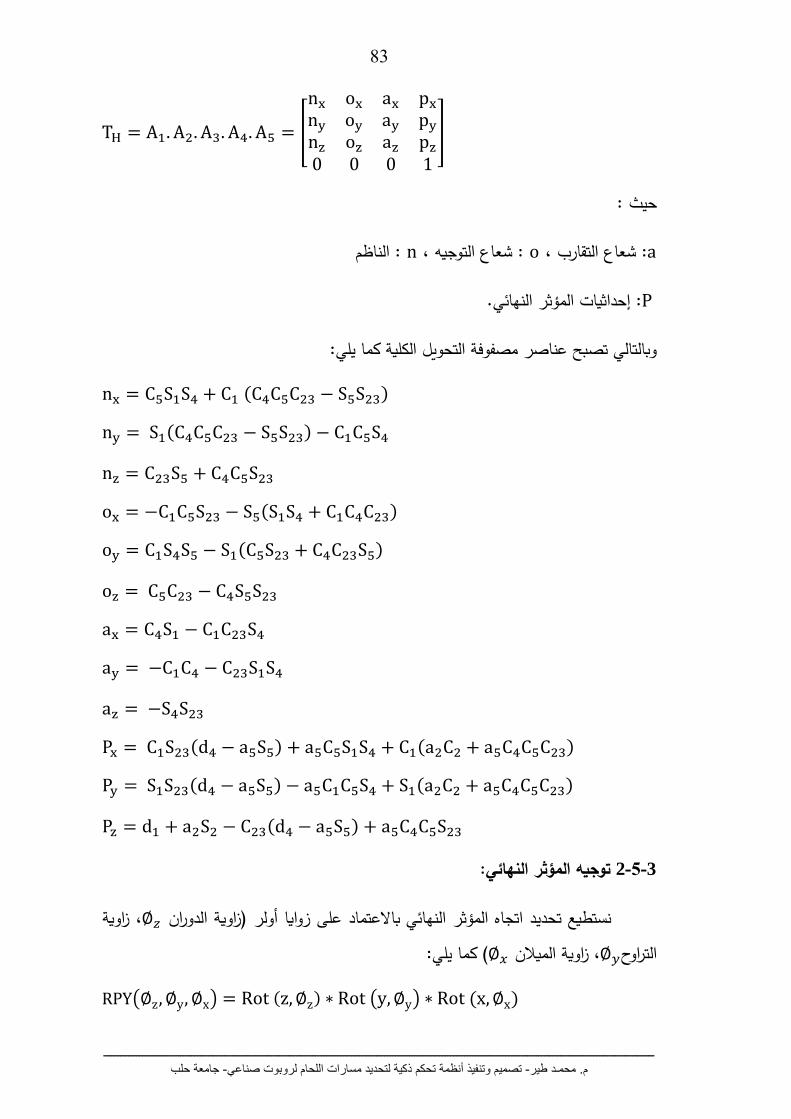
83
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[
]
حيث :
: الناظم : شعاع التوجيه ، : شعاع التقارب ،
: إحداثيات المؤثر النهائي.
:وبالتالي تصبح عناصر مصفوفة التحويل الكلية كما يلي
توجيه المؤثر النهائي: 3-5-2
، زاوية )زاوية الدوران زوايا أولر االعتماد علىب نستطيع تحديد اتجاه المؤثر النهائي ( كما يلي: ، زاوية الميالن التراوح
( ) ( )

84
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[
] [
] [
]
[
]
: لتوجيهبمساواة هذه النتيجة مع مصفوفة ا
[
] ( )
وضرب الطرفين بـ ( )بحل جملة المعادالت بالنسبة لـ :
( )
نوجد الطرف األيمن:
( ) [
]
أما الطرف األيسر:
[
]
بمطابقة الحدود المتشابهة في كال الطرفين نجد أن:
ومنه:
( ) 3

85
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
أيضا:
3
3
نحصل على: (16-3) عالقةعلى ال (15-3) عالقةبقسمة ال
[ ( )] 3
بحساب مماثل نحصل على:
[( ) ( )] 3
:[42] تخطيط المسار 3-5-3
إلـى الموضـع النهـائي Taلروبوت من الموضع االبتدائي تحريك المؤثر النهائي لإذا أردنا Tc المســار المعتمــد كمــا يمكننــا تجزئــة المســار للوصــول إلــى الموضــع نــوع فــإن ذلــك يعتمــد علــى
لـــذا مـــن الضـــروري أن يتحـــرك المـــؤثر أثنـــاء االنتقـــال. Tbالنهـــائي وذلـــك بـــالمرور عبـــر الموضـــع ـــاط وفـــق مـــرورا بانســـيابيةلروبـــوت ل النهـــائي ـــين فـــي معـــين مســـاربمجموعـــة مـــن النق كمـــا هـــو مب .(8-3)الشكل
Tbمرورا بالنقطة المؤثر النهائي للروبوتانتقال (8-3) الشكل
المسارات وميزات كل منها: أنواع فيما يلي سندرس
:مسار خطي من الدرجة األولى -1
مرورا Dإلى النقطة Aلروبوت من النقطة المؤثر النهائي لسندرس حالة انتقال معادلة المسار في حالة المسار الخطي تكون . (9-3)كما هو مبين في الشكل C و B بالنقطتين
لروبوت عن المؤثر النهائي لسبب انحراف هذا ي ،من الدرجة األولى وبالتالي تكون السرعة ثابتة

86
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ال يتم اعتماد المسار الخطي الذ ،أي أثناء تغيير المسار Cو Bمساره لدى وصوله إلى النقطتين لروبوت.لتحريك المؤثر النهائي ل
(من الدرجة األولى)معادلة مسار المؤثر النهائي (9-3) الشكل
مسار من الدرجة الثانية: -2
تكون تكون معادلة المسار من الدرجة الثانية وبالتالي فإن معادلة السرعة هذا النوعفي تمتاز هذه الطريقة . (10-3)كما هو مبين في الشكل أي أن السرعة خطية ، من الدرجة األولى
التعقيد إال أن المسار في هذه الطريقة طويل مما يزيد ببساطتها لسهولة الحسابات وابتعادها عن .تقال من بداية المسار إلى نهايتهمن الزمن الالزم لالن
(من الدرجة الثانية ة المسارمعادل) المؤثر النهائي مسار (11-3) الشكل
مسار من الدرجة الثالثة: -3
تكون وبالتالي فإن معادلة السرعة ،تكون معادلة المسار من الدرجة الثالثة ا النوعفي هذهذا و ،من الدرجة األولى التسارع خطيةالمسار تكون معادلة هذا في حالة .من الدرجة الثانية
تدعى هذه الطريقة في نهاية المسار نتيجة العطالة. لروبوتالمؤثر النهائي ل اهتزازسبب ي .(Cubic Trajectory) التكعيبي تخطيط المسارب

87
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:ات التاليةمعادالت المسار والسرعة والتسارع بالعالقتعطى
3
3 3
3 :كما يليوتعطى الشروط الحدية
:(17-3)و (16-3)وبالتعويض في العالقتين ر أيمن الشروط الحدية في بداية المسا
:(20-3)و (19-3)وبالتعويض في العالقتين من الشروط الحدية في نهاية المسار
3
3 3 3
نحصل على: (23-3)و (22-3) لة العالقتينبحل جم
3
:نحصل على (21-3)و (20-3)و (19-3)بتعويض الثوابت في المعادالت
3
:خامسةمسار من الدرجة ال -4
مسار من الدرجة عادلةللتغلب على مساوئ المسارات السابقة، استخدمنا في بحثنا مالرابعة ومعادلة التسارع من الدرجة من الدرجة تكون وبالتالي فإن معادلة السرعة الخامسة،تدعى هذه .ونهايتهتكون قيم السرعة والتسارع مساوية للصفر في بداية المسار ومنه الثالثة،
.(Quantic Trajectory) العددي تخطيط المساربالطريقة

88
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:ات التاليةتعطى معادالت المسار والسرعة والتسارع بالعالق
3
3
3
3 :كما يليوتعطى الشروط الحدية
(25-3)و (24-3) وبالتعويض في العالقات عندما من الشروط الحدية في بداية المسار
:(26-3)و
و (25-3)و (24-3) اتوبالتعويض في العالق أي من الشروط الحدية في نهاية المسار
(3-26):
3
بشـــكل عالقـــات ضـــمن البرنـــامج المصـــمم كتابـــة ال إيجـــاد قـــيم الثوابـــت بعـــد حـــل اقترحنـــااللتبســـيط :كما يلي مصفوفي
[
]
[
3
]
[
]
:كما يلي نستطيع تحديد قيم الثوابت وفقا للشروط الحدية ومنه
[
]
[
3
]
[
]
3

89
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:المسألة الحركية العكسية 3-6
المؤثر لموضع واتجاه تبعا الروبوت مفاصل زواياالمسألة الحركية العكسية تشمل تعيين معرفة مدى مساهمة كل ذراع في الحركة حتى نحصل على الحركة المطلوبة وبالتالي النهائي،
.للمؤثر النهائي
زواياجميع قيم تكون المسألة الحركية العكسية قابلة للحل عندما نستطيع تعيين حيث أن حركية األماميةمن حل المسألة ال أكثر تعقيدا المفاصل. يعتبر حل المسألة العكسية
قد ال و حلول متعددة حل وحيد أو قد يوجدو المعادالت التي تحل هي عادة معادالت غير خطية روبوت.للتركيب الحركي لل وفقا يكون هناك حلول مقبولة
بالطرق الهندسية. كال أوإن حل المعادالت الالخطية عادة ما يتم بالطرق العددية عدد كتابة دد كبير من المعادالت للوصول للحل، وبالتالي يتطلب ذلكالطريقتين تتطلب كتابة ع
بطئ في معالجة البيانات. إلىره أكبر من األسطر ضمن برنامج التنفيذ الذي يؤدي بدو
لي والبرامج المستخدمة تطور علم الروبوتات مرتبط بشكل مباشر بقدرات الحاسب اآلإن على أساسيعتمد بشكل قيادة الروبوت يفي معالجة وتنفيذ البيانات. كما أن سرعة أداء برنامج
لحساب كأسلوب االستعانة بمعادالت تقاطع دائرتين اقترحنالذا كمية البيانات المراد معالجتها.باإلضافة حساب قيم الزوايا، ة البيانات عند بعض زوايا مفاصل الروبوت بهدف تقليل زمن معالج
لروبوت أم ا عمل فراغلكشف فيما إذا كانت نقطة الهدف تقع ضمن لأخرى أنها تعتبر وسيلة إلى ال وذلك من خالل اكتشاف وجود نقاط تقاطع للدائرتين أم أن الدائرتين ال تتقاطعان.
:الروبوت مفاصلحساب زوايا 3-6-1
مشعل اللحام. زاويةرامترات اللحام ومنها لبا المناسب ضبطالعلى م بدقة يعتمداللحا تنفيذحيث أن مشعل اللحام من أهم العوامل المؤثرة على استقرار القوس الكهربائي، زاويةيعتبر ضبط
غير مستقر قوس كهربائي يمكن أن ينتج عنه على طول الوصلة اللحاميةالمشعل زاوية تغير .تظهر الكثير من العيوب في اللحام وبالتالي

90
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
نجاز عملية اللحام بحيث نضمن الروبوتات إل استخداممن هنا دعت الضرورة إلى زاوية اعتمدوا حثيناالب غالبية اللحامية. على طول الوصلة مشعل اللحامل ثابتة اويةعلى ز الحفاظ .(11-3)كما هو مبين في الشكل اللحام وصالت معظمل مشعل اللحامدرجة ل 45
اللحام وصالتمشعل لبعض الزاوية (11-3) الشكل
قسم مسار اللحام إلى أقسام متساوية نلبدء حساب زوايا مفاصل الروبوت في الحركة العكسية :ة( وفق العالقات التالي n )عدد من النقاط
إحداثيات أول نقطة في المسار. [ ] حيث:
حالة توضع في )مشعل اللحام( حركة المؤثر النهائي للروبوت في هذه الرسالة سندرس . كما (12-3)( كما هو موضح في الشكل X o Y) فقيأعلى مستوى المراد لحامها مشغولةال
تبسيط في ذلك وساهم في النقطة الرسغ مفصلقبل وبعد مرحلتين إلى حلال تقسيم نااقترح .كبير بشكل الحل

91
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الزاوية بين مشعل اللحام والمشغولة المراد لحامها (12-3) الشكل
كما يلي: باالعتماد على إحداثيات نهاية المؤثر النهائي يتم حساب إحداثيات النقطة
3
3
3 3
: حساب الزاوية -
XoYمسقط الروبوت على المستوي (13-3) الشكل
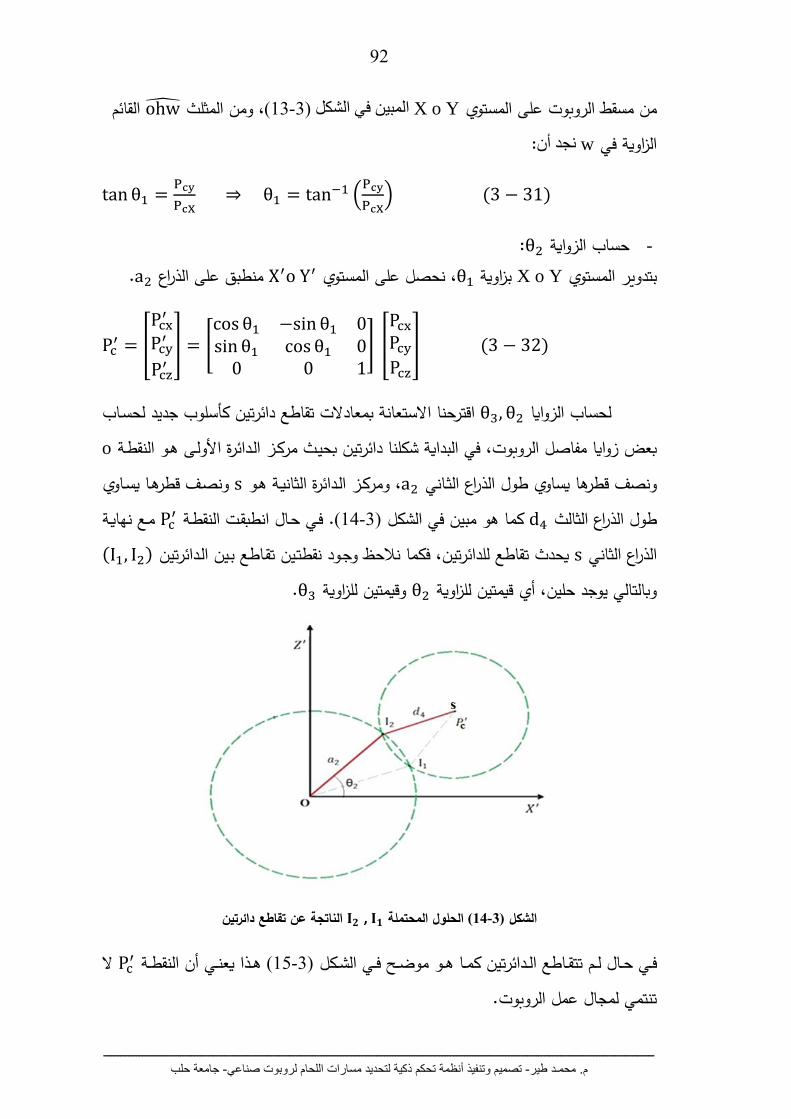
92
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
القائم من المثلث، و (13-3المبين في الشكل ) X o Yمن مسقط الروبوت على المستوي :نجد أن wالزاوية في
(
) 3 3
: ةيواحساب الز -
. منطبق على الذراع ، نحصل على المستوي بزاوية X o Yبتدوير المستوي
[
] [
] [
] 3 3
كأسلوب جديد لحسـاب معادالت تقاطع دائرتينب اقترحنا االستعانة يا والحساب الز oالنقطـة وهـاألولـى مركـز الـدائرةبحيـث دائرتين شكلنا في البداية، بعض زوايا مفاصل الروبوت
ونصـف قطرهـا يسـاوي مركـز الـدائرة الثانيـة هـو ، و الثـاني صف قطرها يساوي طول الذراع ون فـي حـال انطبقـت النقطـة .(14-3) كما هو مبين في الشكل الثالث طول الذراع
مـع نهايـة تقـاطع بـين الـدائرتين نقطتـينفكما نالحظ وجـود ،تقاطع للدائرتينيحدث الذراع الثاني
. وقيمتين للزاوية ة قيمتين للزاويأي ،وبالتالي يوجد حلين
الناتجة عن تقاطع دائرتين ,الحلول المحتملة (14-3) الشكل
ــمفــي حــال ــدائرتين كمــا هــو موضــح فــي الشــكل اتقــاطع ت ل ن النقطــة أهــذا يعنــي (15-3)لال
تنتمي لمجال عمل الروبوت.

93
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
حاالت عدم تقاطع الدائرتين (15-3) الشكل
:كما يلي دائرتينال بمعادالتنستعين التقاطعإليجاد نقاط
3 33
3 3
حيث:
:(3-34)و (3-33) عالقتينبالتعويض في ال
3 3
3 3
:(3-36)في العالقة بفك األقواس
3 3
:(3-37)و (3-35) عالقتينبطرح ال

94
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
3 3
:أن و بفرض
نحصل على: (3-38)عالقة بالتعويض في ال
:(3-35)في العالقة بتعويض قيمة
( )
:أن بفرض
( )
:لى كثيرة حدود من الدرجة الثانيةنحصل عوبالتالي
إليجاد الحلول نحسب المميز:
√ √ 3 3
لهذه المعادلة:وبالتالي نحصل على حلين
√
3
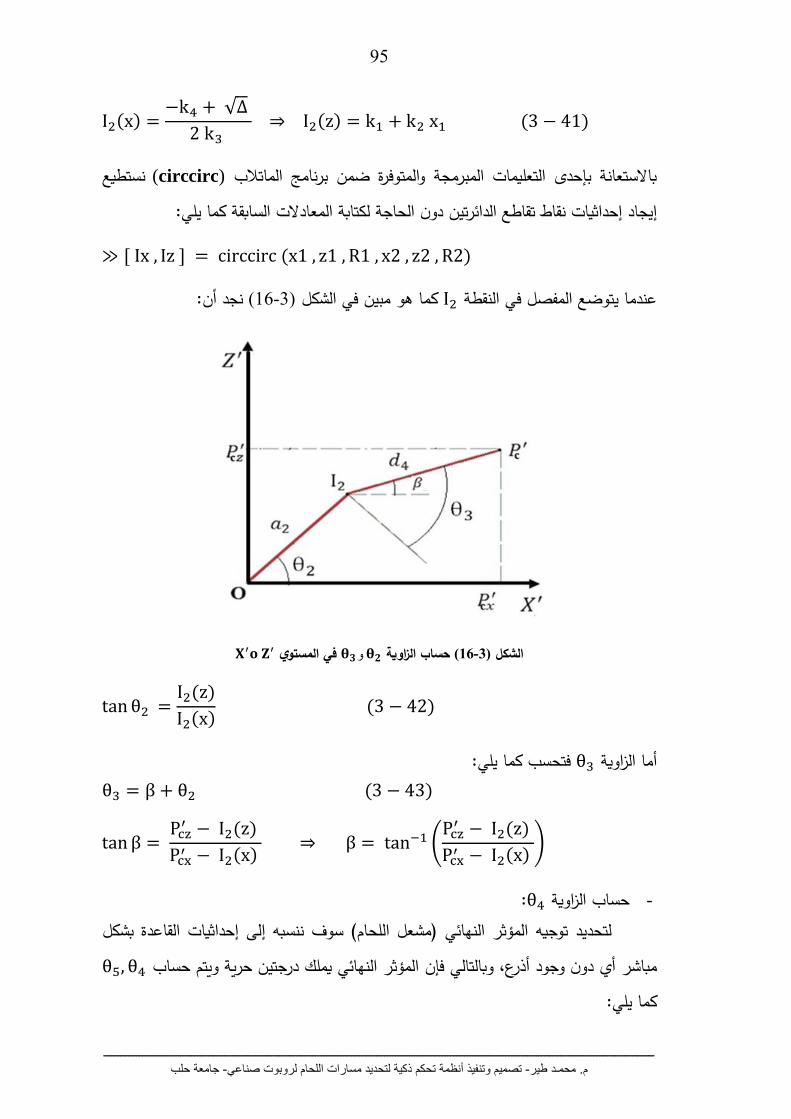
95
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
√
3
نستطيع (circcirc) والمتوفرة ضمن برنامج الماتالب باالستعانة بإحدى التعليمات المبرمجة :كما يلي دون الحاجة لكتابة المعادالت السابقة إيجاد إحداثيات نقاط تقاطع الدائرتين
[ ]
:نجد أن (16-3)كما هو مبين في الشكل عندما يتوضع المفصل في النقطة
في المستوي و حساب الزاوية (16-3) الشكل
3
:فتحسب كما يلي الزاويةأما
β 3 3
β
β (
)
: الزاوية حساب -
القاعدة بشكل إحداثيات إلى هسوف ننسب)مشعل اللحام( المؤثر النهائي حديد توجيهلت ويتم حساب المؤثر النهائي يملك درجتين حريةمباشر أي دون وجود أذرع، وبالتالي فإن
كما يلي:
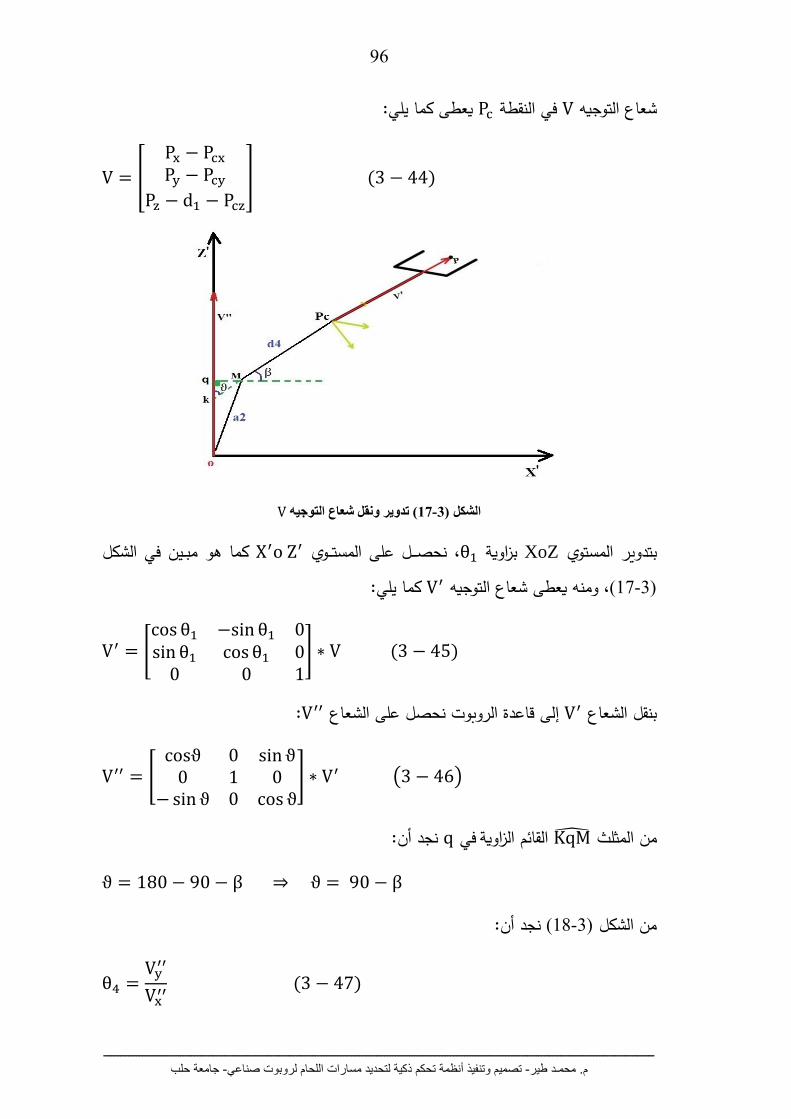
96
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:يعطى كما يلي النقطة في شعاع التوجيه
[
] 3
تدوير ونقل شعاع التوجيه (17-3) الشكل
ين في الشكلــكما هو مب وي ـــل على المستــــ، نحص بزاوية XoZبتدوير المستوي : كما يلي التوجيه ، ومنه يعطى شعاع(3-17)
[
] 3
: الشعاع قاعدة الروبوت نحصل على إلى بنقل الشعاع
[
] (3 )
نجد أن: في القائم الزاوية من المثلث
β β
نجد أن: (18-3)من الشكل
3

97
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
باالعتماد على الشعاع و حساب الزاوية (18-3) الشكل
:فتحسب كما يلي الزاويةأما
3
حيث:
√(
)
إيجاد مصفوفة جاكوبيان: 3-7
وأإلى حركات السرعات التفاضلية للمفاصل وأالحركات بتحويلجاكوبيان يسمح تحويل سرعات تفاضلية للمؤثر النهائي للروبوت كما يلي:
[ ]
[ ]
[
]
[ ] [ ] [ ] 3
:حيث
. تمثل الحركات التفاضلية للمؤثر النهائي على المحاور:

98
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
. تمثل الحركات الدورانية التفاضلية للمؤثر النهائي حول المحاور:
بالنسبة للزمن نحصل على السرعات التفاضلية عوضا عن ينالمصفوفتهاتين إذا تم اشتقاق الحركات التفاضلية.
[ ] [ ] [ ] 3
عندئذ فإن:
[
]
[ ]
[
]
3
المؤثر النهائي كما يلي:المفاصل بالنسبة لسرعة ةعطينا قيمة سرعي يانمعكوس جاكوب كما أن
[ ] [ ] [ ] 3
الوسيطة، ومن ثم مصفوفات جمل اإلحداثياتو مصفوفة التحويل الكلية يجادإلبالماتالب استعنا :عناصر مصفوفة جاكوبيان كما يلي حددنا
[
]
عناصر مصفوفة جاكوبيان للمفاصل الدوارة تعطى كما يلي:
3 3

99
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
3
3
3
(3 )
3
:كما يلي على سبيل المثال يمكن حساب
نجد أن: من مصفوفة التحويل الكلية
[ ] [
] [
]
وبما أن:
[
]
:إذن

100
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وأدرجنا النتائج ضمن الماتالب لتشكيل أوجدنا كافة عناصر مصفوفة جاكوبيان سلوباألوبنفس مصفوفة جاكوبيان.
: المحاكاة 3-8
حاسب بغية تمثيل الشـكل الهندسـي الباستخدام تتمتعرف عملية المحاكاة على أنها عملية .الحركي سلوكهللروبوت وتقليد حركته من أجل محاكاة
كمن أهمية المحاكاة في تقليل زمن التطوير وزمن التجريب للروبوت وتقليل األخطاء قبل تتستخدم تقنية النمذجة الرياضية والمحاكاة التصويرية ثالثية البعد كأداة مهمة لتمثيل . التنفيذالحركي وتمثيل العمليات اإلنتاجية المطلوب تنفيذها من قبل الروبوت الصناعي. إن السلوك
إضافة إلى تغير الشكل المؤثر النهائيعملية المحاكاة تشمل تغير كل من موضع واتجاه للنموذج الهندسي لنموذج الروبوت، كما يمكن لعملية المحاكاة أن تشمل على تغيير زاوية الرؤيا
الشكل الهندسي للروبوت أو لجزء محدد منه. إن تطور دقة وقدرة تصغيرأو بيرتكإضافة إلى الحواسب الشخصية ساعد على بناء برمجيات قادرة على تنفيذ محاكاة للعديد من األنظمة
هذا التي سوف نستخدمها في (MATLAB)الفيزيائية ومن ضمن هذه البرمجيات نذكر برمجية البحث.
مـــــن إحـــــدى األدوات المفيـــــدة جـــــدا فـــــي تحليـــــل وتصـــــميم األنظمـــــة تعتبـــــر لغـــــة المـــــاتالب أصــبحت ذات تواجــد واســع فـــي المنــاهج الهندســية كمــا أنهـــا اإللكترونيــة باســتخدام الحاســب، وقـــد . ومحاكاتها تستخدم صناعيا في تصميم األنظمة

101
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
(Matrix Laboratory) من األحرف األولى للعبارة MATLABجاءت كلمة ماتالب
مختبر المصفوفات، حيـث تتعامـل لغـة مـاتالب مـع الثوابـت والمتحـوالت كمصـفوفات رياضـية،أي هذا ،العمليات الرياضية االفتراضية في ماتالب هي عمليات على مصفوفات فإن وبناء على ذلك
المكتوب بلغة ماتالب سيكون موجزا أكثر مما لـو كـان سـيكتب بأيـة لغـة برمجـة يعني أن البرنامجإلـى لغـة مـاتالب دون الحاجـةبفالعمليات الرياضية المعقـدة يمكـن كتابتهـا فـي أسـطر قليلـة أخرى،
المصــفوفات تجعــل الحلقــات البرمجيــة ثــم تنفيــذها باســتخدام الحاســب للحصــول علــى النتــائج. هــذهمـا هـذا ، ة فـي الحسـاباتعاليـ ةبا للفهم لكنها ستجعله ذو كفـاءالبرنامج المكتوب بلغة ماتالب صع
لغـة المـاتالب تحمـل العديـد مـن أصـبحتف ها مجمعا للمهندسين على اخـتالف اختصاصـاتهم،جعل .ومن أهمها المكتبات الخاصة بالروبوت المكتبات البرمجية في مختلف االختصاصات الهندسية
تمثيــل قــادر علــىبرنــامج حاســوبي صــممناالمــاتالب ضــمن GUI بخاصــية واجهــاتباالســتعانة لروبوت يملـك والعكسية للحركة األمامية عملية المحاكاة تنفيذ من خالل للروبوتالسلوك الحركي
. اتوذلـك بـدون االسـتعانة بـأي مكتبـة مـن المكتبـات الخاصـة بدراسـة الروبوتـ درجـات حريـة خمس هـيلبرنـامج كمـا لالنافـذة األساسـية أصـبحت و ، (19-3)مراحل عمل البرنامج موضحة في الشكل
.(20-3) الشكلفي ةمبين
المخطط الصندوقي لمراحل حل المسألة الحركية األمامية والعكسية (19-3) الشكل
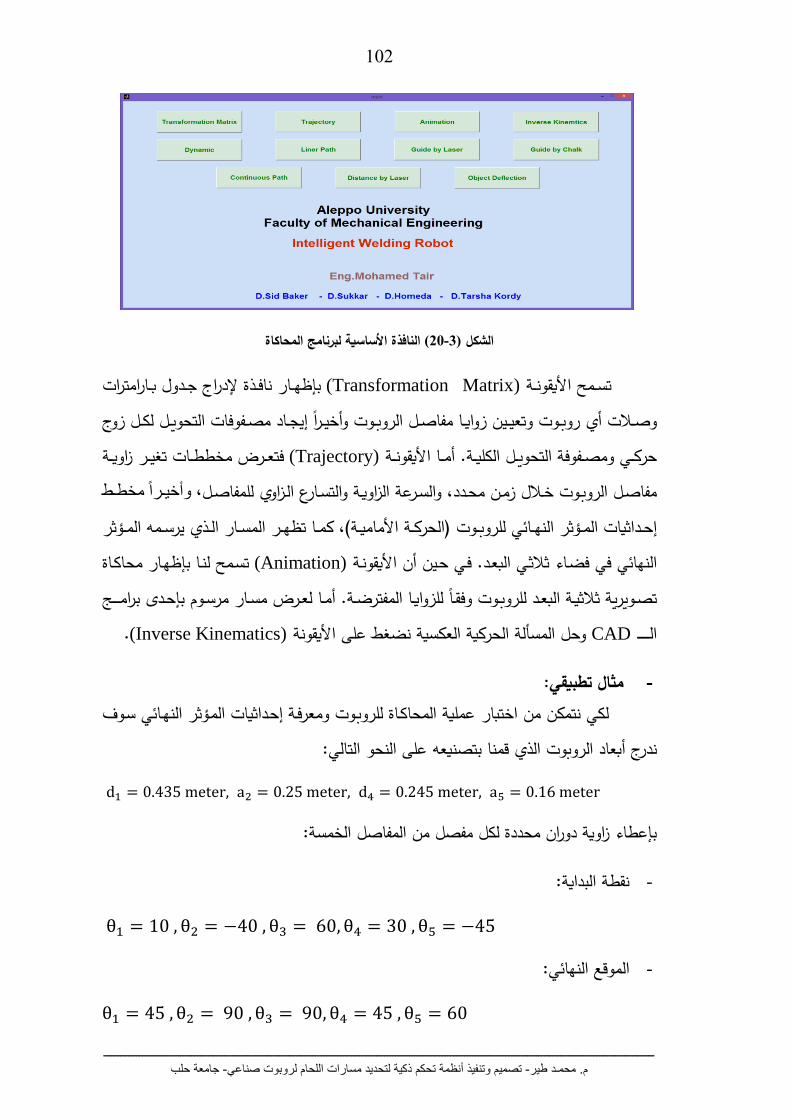
102
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ةالنافذة األساسية لبرنامج المحاكا (21-3) الشكل
إلدراج جــدول بــارامترات بإظهــار نافــذة (Transformation Matrix) األيقونــةتســمح إيجــاد مصــفوفات التحويــل لكــل زوج وتعيــين زوايــا مفاصــل الروبــوت وأخيــرا روبــوت أي وصــالت
تغيـــر زاويـــة مخططـــات تعـــرض ف (Trajectory) األيقونـــةأمـــا حركـــي ومصـــفوفة التحويـــل الكليـــة.، وأخيررام مط رر للمفاصــلالتســارع الــزاوي و الســرعة الزاويــة و مفاصــل الروبــوت خــالل زمــن محــدد،
المـــؤثر رســمه يالمســار الــذي تظهـــر، كمــا األماميــة( حركــة)الللروبـــوت المــؤثر النهــائيإحــداثيات محاكـاة تسـمح لنـا بإظهـار (Animation) األيقونـةفـي حـين أن . في فضـاء ثالثـي البعـد النهائي
ـــمســار مرســوم بإحــدى برام عــرضلأمــا . وفقــا للزوايــا المفترضــة تصــويرية ثالثيــة البعــد للروبــوت ج ـــ .(Inverse Kinematics)نضغط على األيقونة العكسية الحركية المسألة وحل CADـ ــــــــال
:تطبيقي مثال -
سـوف المـؤثر النهـائيللروبـوت ومعرفـة إحـداثيات ةلكي نتمكن من اختبار عملية المحاكـا :على النحو التالي الذي قمنا بتصنيعه روبوتالأبعاد ندرج
3
:خمسةلبإعطاء زاوية دوران محددة لكل مفصل من المفاصل ا
نقطة البداية: -
3
الموقع النهائي: -

103
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
. (21-3)الشكل في من خالل النافذة المبينة خمسةالزوايا ال إدراجيمكن
(. A-1)كود البرنامج موضح في الملحق
للروبوت خمسةالالوصالت نافذة تحديد زوايا (21-3) الشكل
وفقا لجدول بـارامترات الوصـالت لألزواج الحركية المصفوفات الموسعة حساب وعرضيمكننا مصـفوفة التحويـل حسـاب، ومـن ثـم (22-3) الشـكلفي ضمن النافذة الموضحة الخمسة للروبوت (. A-2.)كود البرنامج موضح في الملحق ومصفوفة جاكوبيان الكلية للروبوت
ومصفوفة جاكوبيان لروبوتلألزواج الحركية ل مصفوفات التحويل حسابنافذة (22-3) الشكل
األمامية الحركة عالقاتالتعويض في وبعد على الزوايا المفترضة لمفاصل الروبوت بناء ، حيث نالحظ تطابق النتائج للروبوتالمؤثر النهائي واتجاه عضنحصل على مو المستنتجة سابقا
.(22-3) المبينة في الشكل مع عناصر مصفوفة التحويل الكلية
33
3
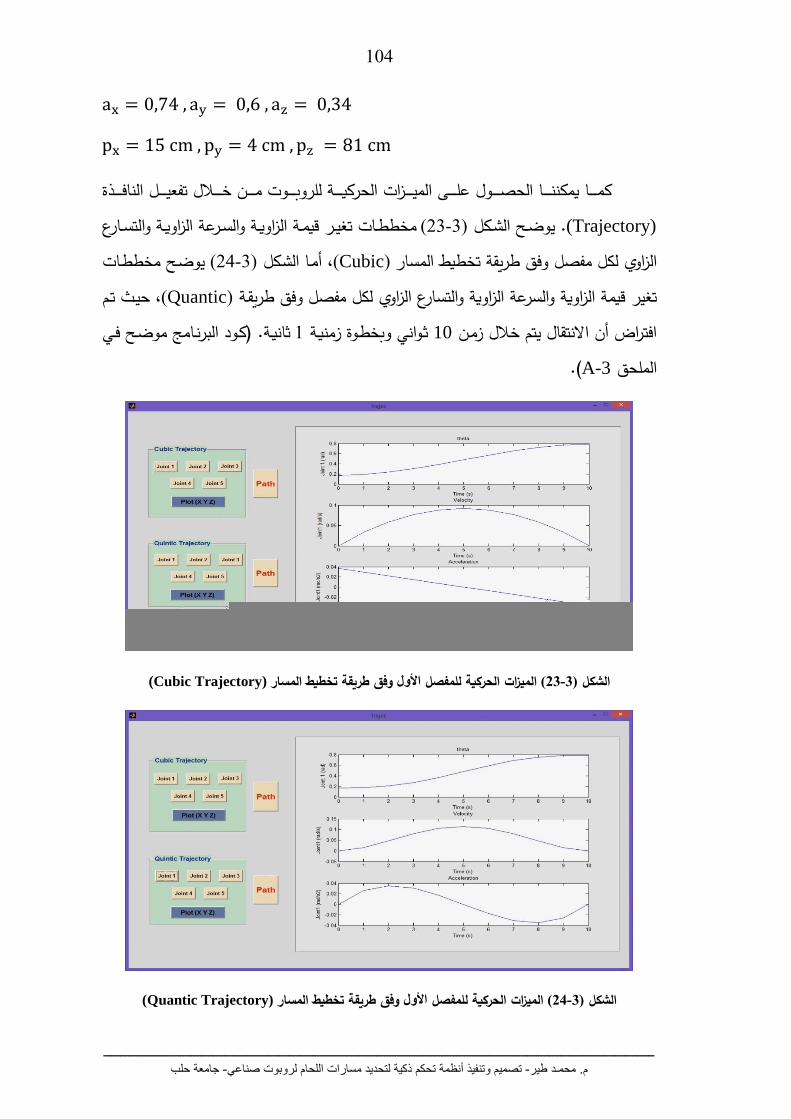
104
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
3
ــــــوتكمــــــا ــــــة للروب ــــــزات الحركي ــــــى المي ــــــا الحصــــــول عل ــــــذة يمكنن ــــــل الناف مــــــن خــــــالل تفعي(Trajectory). والســرعة الزاويــة والتســارع قيمــة الزاويــة تغيــر اتمخططــ (23-3)يوضــح الشــكل
يوضـح مخططـات (24-3)أمـا الشـكل ،(Cubic) وفق طريقة تخطيط المسار لكل مفصلالزاوي حيـث تـم ،(Quantic)وفق طريقـة لكل مفصلوالسرعة الزاوية والتسارع الزاوي قيمة الزاوية تغير
)كـود البرنـامج موضـح فـي ثانيـة. 1بخطـوة زمنيـة ثـواني و 10 خالل زمـنافتراض أن االنتقال يتم (.A-3الملحق
(Cubic Trajectory)وفق طريقة تخطيط المسار األولللمفصل الميزات الحركية (23-3) الشكل
(Quantic Trajectory)وفق طريقة تخطيط المسار األولللمفصل الميزات الحركية (24-3) الشكل
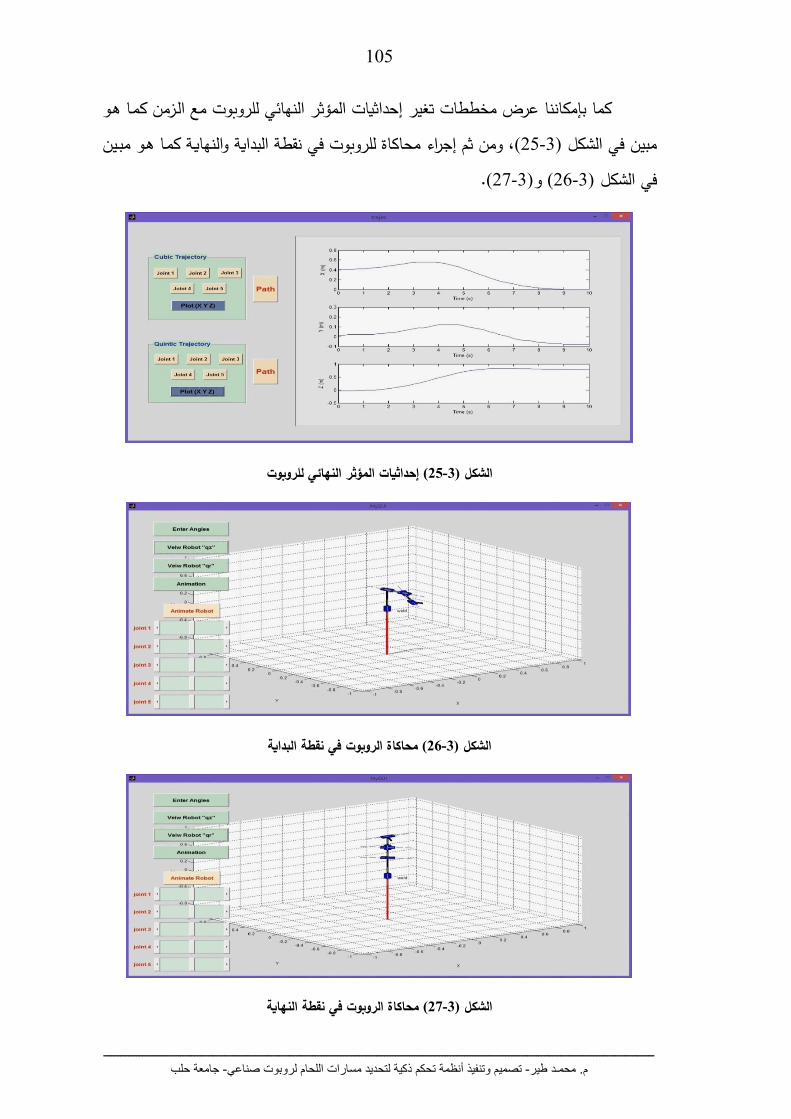
105
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كمـا هـو مع الـزمن إحداثيات المؤثر النهائي للروبوت تغير اترض مخططكما بإمكاننا ع، ومن ثم إجراء محاكاة للروبوت في نقطة البداية والنهايـة كمـا هـو مبـين (25-3) مبين في الشكل
.(27-3)و (26-3) الشكلفي
للروبوت المؤثر النهائيإحداثيات (25-3) الشكل
محاكاة الروبوت في نقطة البداية (26-3) الشكل
محاكاة الروبوت في نقطة النهاية (27-3) الشكل

106
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المسألة األمامية، ولتمثيل المسألة العكسية البد أوال من حل عبر عنإن المثال السابق ي إلى هوتقسيم (Auto Cad)لذا قمنا برسم مسار ضمن برنامج للمؤثر النهائي،افتراض مسار
عدد كبير من النقاط ومن ثم عرضه في البرنامج المصمم في الماتالب كما هو مبين في (.A-4)كود البرنامج موضح في الملحق . (28-3)الشكل
مسار المؤثر النهائي للروبوت (28-3) الشكل
قيم زوايا استطعنا تحديد بتطبيق عالقات حساب زوايا مفاصل الروبوت المستنتجة سابقا لكل نقطة من المسار، ومن ثم أجرينا محاكاة لحركة المؤثر النهائي على المسار كما لــصامفال
.(29-3) الشكلهو مبين في
على المسار لمؤثر النهائيلمحاكاة ثالثية البعد (29-3) الشكل
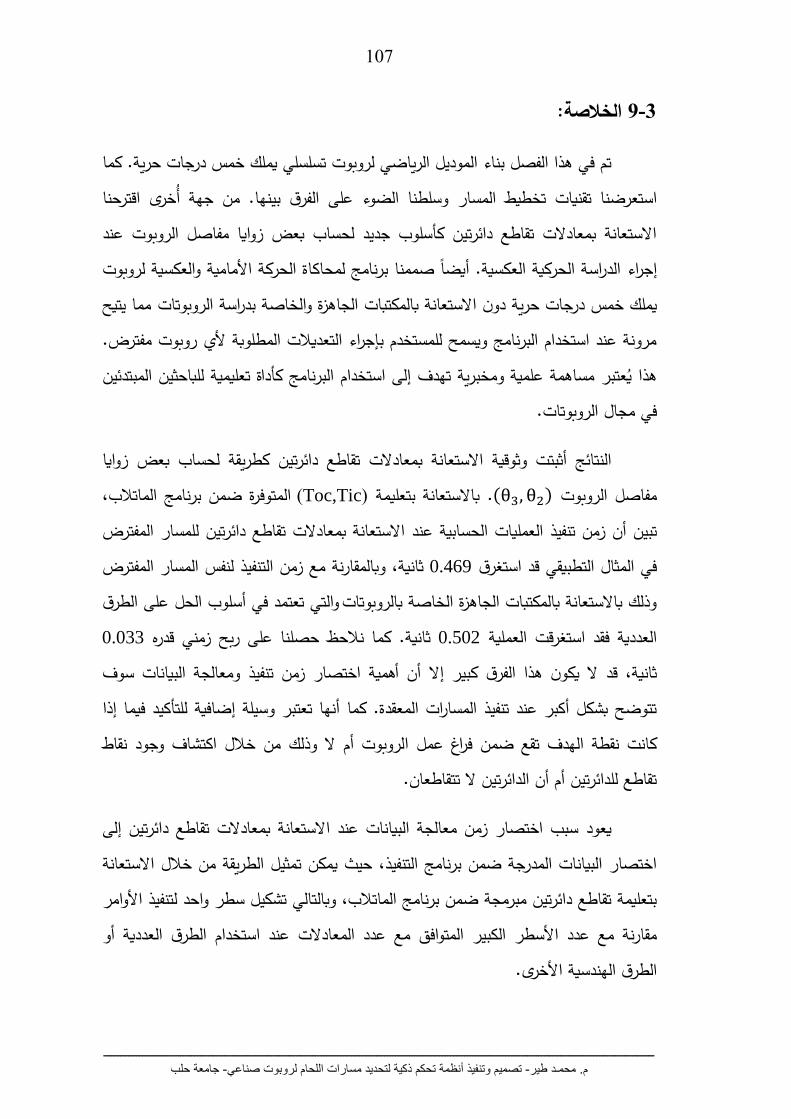
107
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الخالصة: 3-9
بناء الموديل الرياضي لروبوت تسلسلي يملك خمس درجات حرية. كما تم في هذا الفصل استعرضنا تقنيات تخطيط المسار وسلطنا الضوء على الفرق بينها. من جهة أخرى اقترحنا
عند االستعانة بمعادالت تقاطع دائرتين كأسلوب جديد لحساب بعض زوايا مفاصل الروبوت برنامج لمحاكاة الحركة األمامية والعكسية لروبوت صممنا الدراسة الحركية العكسية. أيضا إجراءمما يتيح دون االستعانة بالمكتبات الجاهزة والخاصة بدراسة الروبوتات درجات حرية خمسيملك
مرونة عند استخدام البرنامج ويسمح للمستخدم بإجراء التعديالت المطلوبة ألي روبوت مفترض.إلى استخدام البرنامج كأداة تعليمية للباحثين المبتدئين تهدف مخبريةو مساهمة علمية هذا يعتبر
في مجال الروبوتات.
لحساب بعض زوايا كطريقة معادالت تقاطع دائرتين ب االستعانة وثوقيةالنتائج أثبتت ،ضمن برنامج الماتالب المتوفرة( Toc,Tic)باالستعانة بتعليمة . الروبوتمفاصل
للمسار المفترض االستعانة بمعادالت تقاطع دائرتينعند العمليات الحسابيةتنفيذ أن زمن تبين وبالمقارنة مع زمن التنفيذ لنفس المسار المفترض ، ثانية 0.469قد استغرق في المثال التطبيقي
الحل على الطرق أسلوبوالتي تعتمد في وذلك باالستعانة بالمكتبات الجاهزة الخاصة بالروبوتات 0.033كما نالحظ حصلنا على ربح زمني قدره ثانية. 0.502العددية فقد استغرقت العملية
أن أهمية اختصار زمن تنفيذ ومعالجة البيانات سوف إالقد ال يكون هذا الفرق كبير ، ثانيةفيما إذا أكيد أنها تعتبر وسيلة إضافية للت كما تتوضح بشكل أكبر عند تنفيذ المسارات المعقدة.
لروبوت أم ال وذلك من خالل اكتشاف وجود نقاط ا عمل فراغكانت نقطة الهدف تقع ضمن تقاطع للدائرتين أم أن الدائرتين ال تتقاطعان.
إلى الستعانة بمعادالت تقاطع دائرتينسبب اختصار زمن معالجة البيانات عند ا يعودحيث يمكن تمثيل الطريقة من خالل االستعانة ،اختصار البيانات المدرجة ضمن برنامج التنفيذ
تشكيل سطر واحد لتنفيذ األوامر بالتالي و ،ضمن برنامج الماتالبمبرمجة بتعليمة تقاطع دائرتين وأمقارنة مع عدد األسطر الكبير المتوافق مع عدد المعادالت عند استخدام الطرق العددية
الطرق الهندسية األخرى.

108
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الفصل الرابع
للروبوت ديناميكيةالدراسة ال

109
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة: 4-1
للروبوت وفق مسار محدد يتطلب تدوير جميع المفاصل بنفس المؤثر النهائيتحريك ن تكون قادرة على أن تعطي عزم الدوران لي فإن جميع محركات المفاصل يجب أالوقت، وبالتا
فكرة إعطاءفي للروبوت الديناميكية. من هنا تأتي أهمية الدراسة أذرع الروبوت تحريكالكافي لالمفاصل. للحصول على المعادالت الديناميكية بإمكاننا اتباع دويرمسبقة لعزم الدوران الالزم لت
. بالنسبة لروبوت يملك خمس درجات [44]ويلر، دالمبيرتأ-أويلر، نيوتن-عدة طرق منها: الغرانجتعقيد النظام و وبالتالي عملية الحساب تكون شاقةحرية فإن معادالت الحركة تكون غير خطية
سوف يزداد.
نمذجة الموديل الديناميكي هـي عبـارة عـن مجموعـة مـن المعـادالت الرياضـية التـي تصـف ــديناميكي للروبــوت، حيــث تحــدد العالقــة بــي المطبــق مــن قبــل المحــرك والحركــة العــزم نالســلوك ال
ذو أهميـــة كبيـــرة للـــتحكم بـــالروبوت نمـــوذج الـــديناميكي الناتجـــة عـــن الروبـــوت. لـــذا يعتبـــر إيجـــاد ال .[45] وبرمجته
النمـوذج الـديناميكي لروبـوت يملـك خمـس إيجـاد منهجيةإلى سيتم التطرق فصلفي هذا الفــي فضــاء ة الروبــوتمحاكــاومــن ثــم تصــميم برنــامج إلجــراء العمليــات الحســابية و ،درجــات حريــة
. [43] االسـتعانة بالمكتبــات الخاصـة بالروبوتــات دون MATLAB بيئــة ثالثـي البعـد وذلــك ضـمنم اواسـتخد وفي كأسـلوب للحـلمصفبشكل معادالت العزمإدراج اقتراح في هذا الفصلأهمية تكمن
رفـــع أداء البرنـــامج وســـرعة معالجـــة البيانـــات وذلـــك بهـــدف عنـــد تصـــميم البرنـــامج، حلقـــات التكـــرار ضمن الحاسب.
الديناميكي للروبوت: نموذجالبناء 4-2
المعادالت الرياضية التي تحدد العالقة بين إيجادل الديناميكي للروبوت يعني يالمود بناء –الروبوت )موضع عنوالحركة الناتجة )المحرك( العزم المطبق على المفصل من قبل المشغل
الموضع إيجادانه في حالة معرفة العزم المطبق على المفصل يمكن أيتسارع(، –سرعة .والسرعة والتسارع وبالعكس
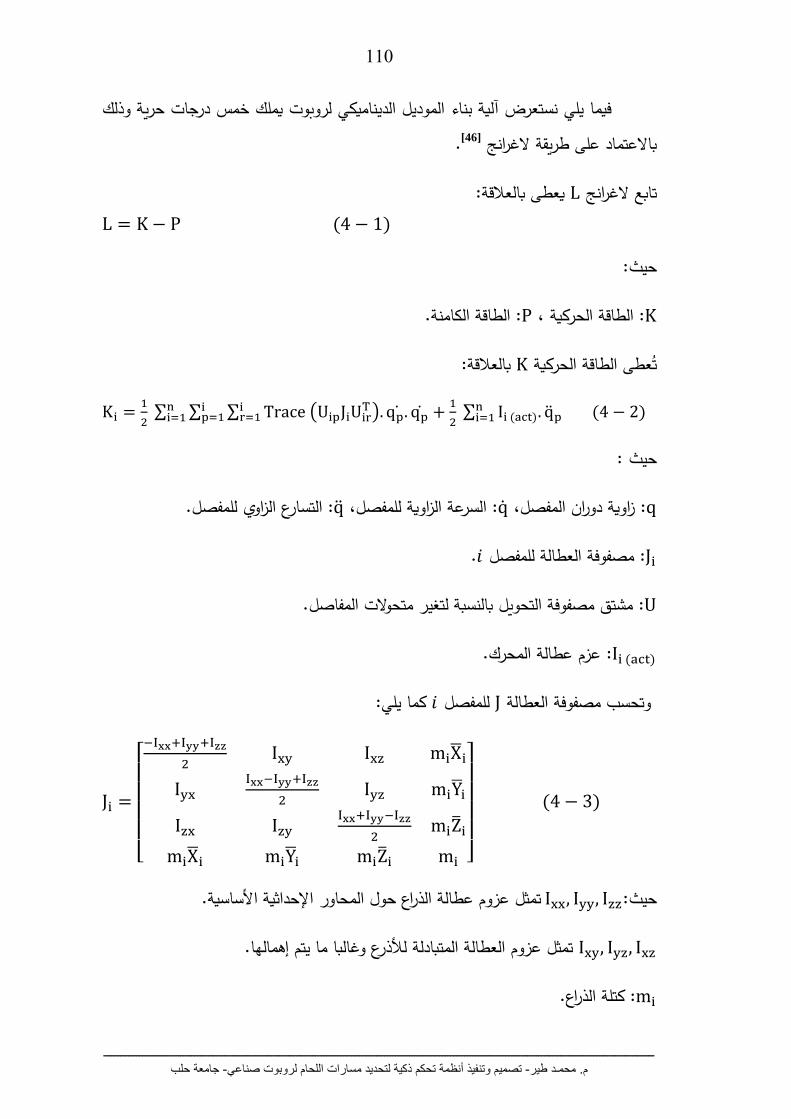
110
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
خمس درجات حرية وذلك يملكل الديناميكي لروبوت يالمودنستعرض آلية بناء فيما يلي .[46] باالعتماد على طريقة الغرانج
:يعطى بالعالقة تابع الغرانج
حيث:
كامنة.الطاقة ال : ، الطاقة الحركية :
:بالعالقة عطى الطاقة الحركية ت
∑ ∑ ∑ (
)
∑
حيث :
التسارع الزاوي للمفصل. : : السرعة الزاوية للمفصل، ، : زاوية دوران المفصل
. مصفوفة العطالة للمفصل :
بالنسبة لتغير متحوالت المفاصل. مشتق مصفوفة التحويل :
عزم عطالة المحرك. :
:كما يلي للمفصل العطالة وتحسب مصفوفة
[
]
3
ساسية.األ اإلحداثيةحول المحاور ذراعتمثل عزوم عطالة ال حيث:
.إهمالهاوغالبا ما يتم ألذرعتمثل عزوم العطالة المتبادلة ل
.الذراع: كتلة

111
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بالنسبة لتغير متحوالت المفاصل كما يلي: يحسب مشتق مصفوفة التحويل
[ ]
( )
مصفوفة ثابتة تتعلق بنوع المفصل وتعطى للمفصل الدوراني كما يلي: حيث
[
]
:ذرعلأللنظام ما بمجموع الطاقات الكامنة تعطى الكامنة الطاقةأما
∑ ∑ [
( )]
وتعطى كما يلي: تمثل شعاع الجاذبية حيث
[ ]
عطى كما يلي:وت عن محور المفصل الذراع ثقل بعد مركزفهي أما
[ ]
بالتعويض في المعادلة نحصل على الشكل النهائي لمعادلة الغرانج:
∑ ∑ ∑ (
)
∑
∑ [ (
)]
من اجل الحصول على المعادالت الديناميكية للحركة يتم اشتقاق تابع الغرانج وفقا للعالقة :التالية
(
)
ومع n-Dof نحصل على المعادالت الديناميكية من اجل ذراع روبوت (6-4) باشتقاق العالقة :كالتالي بإهمال االحتكاك ن جميع المفاصل دورانية نحصل على عالقة العزمافتراض أ
∑ ∑ ∑

112
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
،وريوليسـوفة كــمصف: ،ركزيةـوى المــوفة القــمصف: ،وفة العطالةــمصف: حيث: مصفوفة الجاذبية.:
العالقات التالية: من هذه المصفوفات ويتم حساب قيم عناصر
∑ (
)
∑ ( )
∑
حيث:
( )
خمس درجات حرية )خمس مفاصل دورانية( يملك جل روبوت أمن (8-4)في العالقة بالتعويض العزم كما يلي: لعالقةنحصل على الشكل العام
:تصبح عالقة العزم كما يلي ومنه
3
طريقة حسابية إلجراء النمذجة الديناميكية Zaharia،Filip، Alain ون الباحث عرضسرعة أداء ن . إ[49]،[48]، [47]بالمصفوفات الموسعة كأسلوب للحل للروبوت دون االستعانةاقترحنا من هنا ،المراد معالجتها المدرجة على كمية البيانات أساسيالبرنامج تعتمد بشكل
واستخدام حلقات التكرار ضمن برنامج الحساب مصفوفي شكلالعزم ب اتكتابة عالقضرورة .المصمم هدف تقليل زمن معالجة البيانات وبالتالي تحسين أداء عمل البرنامجب

113
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
يمكن كتابة عالقة العزم بشكل مصفوفي كما يلي:
[
]
[
]
[
]
[
]
حيث:
[
]
[
]
[
]
[
]

114
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:المحاكاة إجراء الحسابات وتنفيذ 4-3
قــادر علــى برنــامج حاســوبي صــممناالمــاتالب ضــمن GUI بخاصــية واجهــاتباالســتعانة دون االسـتعانة بـأي لحساب العزم الالزم لتدوير مفاصل الروبوت العمليات الحسابية الالزمة تنفيذحركــة المــؤثر النهــائي ل عمليــة محاكــاة أجرينــاومــن ثــم ، ة مــن المكتبــات الخاصــة بالروبوتــاتمكتبــ
. مراحــــل عمــــل البرنــــامج موضــــحة بــــالمخطط الصــــندوقي فــــي للروبــــوت علــــى المســــار المفتــــرض . (1-4)الشكل
المخطط الصندوقي لمراحل عمل البرنامج (1-4) الشكل
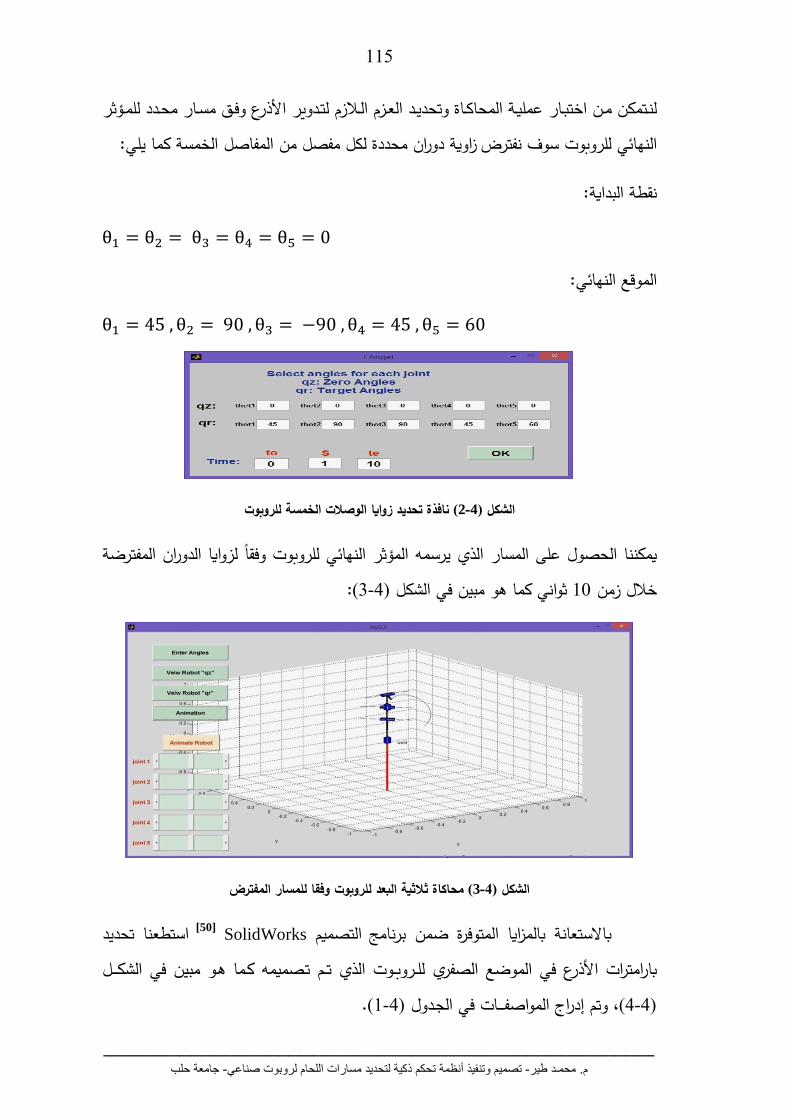
115
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
للمــؤثر العــزم الــالزم لتــدوير األذرع وفــق مســار محــددوتحديــد ةعمليــة المحاكــا لنــتمكن مــن اختبــار :كما يلي لخمسةزاوية دوران محددة لكل مفصل من المفاصل ا سوف نفترضللروبوت النهائي
نقطة البداية:
الموقع النهائي:
للروبوت خمسةالالوصالت نافذة تحديد زوايا (2-4) الشكل
وفقا لزوايا الدوران المفترضة المؤثر النهائي للروبوت الذي يرسمهالمسار يمكننا الحصول على :(3-4)الشكل في كما هو مبين ثواني 10 خالل زمن
وفقا للمسار المفترضمحاكاة ثالثية البعد للروبوت (3-4) الشكل
[50] التصميم برنامجبالمزايا المتوفرة ضمن االستعانة ب SolidWorks استطعنا تحديد
ل ــــو مبين في الشكـما هـك صميمهـم تــالذي ت وتــروبــلل في الموضع الصفري بارامترات األذرع .(1-4) دولـات في الجـــــوتم إدراج المواصف، (4-4)

116
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لروبوت المصمما ألذرعالوضعية الصفرية (4-4) الشكل
بارامترات األذرع في الموضع الصفري (1-4) الجدول
Izz(kg.m2) Iyy(kg.m
2) Ixx(kg.m
2) rz(m) ry(m) rx(m) L(m) m(kg) Link
0.06 1.1 1.08 0.41 -0.03 -0.05 0.435 6.32 1 0.09 1.41 1.35 0.48 -0.02 0 0.26 5.67 2 0.14 0.4 0.27 0.45 0.05 0.32 0.125 1.29 3 0.2 0.37 0.17 0.42 0.06 0.44 0.12 0.99 4 0.03 0.05 0.02 0.44 0 0.57 0.16 0.10 5
واصفات الهندسية ألي نافذة ضمن البرنامج إلدراج المصممنا لتنفيذ الدراسة الديناميكية للروبوت وفق طريقة العزم الالزم لتدوير كل مفصلمخطط على يمكننا الحصول، ومنه روبوت مفترضكل العزم الالزم لتدوير، ومخطط (5-4)الشكل في كما هو موضح (Cubic)تخطيط المسار
حيث أن .(6-4)الشكل في كما هو موضح (Quantic)وفق طريقة تخطيط المسار مفصليكون أقل من العزم المحسوب (Quantic)العزم الالزم لتدوير األذرع وفقا لطريقة تخطيط مسار
كثيرة الحدود من الدرجة الخامسة.مسار ، وذلك نظرا النسيابية منحني (Cubic)وفقا للمسار (.A-5)كود البرنامج موضح في الملحق
(Cubic)لتخطيط المسار بطريقة عزم الدوران الالزم لتدوير األذرع وفقا ( 5-4) الشكل

117
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
(Quantic)بطريقة لمسار لتخطيط اعزم الدوران الالزم لتدوير األذرع وفقا ( 6-4) الشكل
اصة بالروبوت في برنامج الخ ةيوضح مخططات العزم باستخدام المكتب (4-7) أما الشكل (.A-6)كود البرنامج موضح في الملحق الماتالب.
Robot Toolboxباستخدام عزم الدوران الالزم لتدوير األذرع( 7-4) الشكل

118
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الخالصة: 4 -4
منهجية إليجاد النموذج الديناميكي لروبوت يملك خمس درجات تم في هذا الفصل تقديم دون االستعانة بالمكتبات الجاهزة الخاصة ماتالبصممنا برنامج ضمن بيئة . كماحرية
حيث اقترحنا كتابة عالقات العزم بشكل مصفوفي لتنفيذ العمليات الحسابية، بالروبوتات واالستعانة بحلقات التكرار ضمن البرنامج بهدف تسريع معالجة البيانات ضمن الحاسب.
يجاد النموذج الديناميكي أظهرت مدى أهميةنتائج ال . لمعرفة سلوك الروبوت المحاكاة وا كفاءة فع لر كأسلوب للحل وحلقات التكرار وثوقية االستعانة بالمصفوفات التجارب أثبتت كما
أن زمن تنفيذ تبين المتوفرة ضمن برنامج الماتالب، ( Toc,Tic)باالستعانة بتعليمة . البرنامجقد في البرنامج المصمم وفق المسار المفترض لتدوير كل ذراععملية حساب العزم الالزم
لنفس المسار باالستعانة العزم عملية حساب وبالمقارنة مع زمن تنفيذ ،ثانية 0.308 استغرق الجاهزة الخاصة بالروبوتات والتي تعتمد في اسلوب الحل على الطرق الحسابية األخرى ةبالمكتب
يعود، ثانية 0.354كما نالحظ حصلنا على ربح زمني قدره ثانية. 0.662فقد استغرقت العملية االستعانة بالمصفوفات وحلقات ىلإفي البرنامج المصمم سبب اختصار زمن معالجة البيانات اختصار البيانات المدرجة ضمن برنامج مما أدى إلى ،التكرار ضمن البرنامج كأسلوب للحل
.التنفيذ
119
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الفصل الخامس منهجية تنفيذ روبوت صناعي

120
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المقدمة: 5-1
وحيز العمل الذي سيعمل وظيفتهأن نحدد أوال من اجل تصميم روبوت صناعي البد ضمنه وأجواء ومتطلبات العمل. بعد ذلك يتم اختيار شكل الروبوت وعدد أذرعه وما يتمتع به من
. باإلضافة إلى نوع الروبوت إذا كان متحركا أو ثابتا ،حركة والحدود المسموحةللحريات
انطالقا من عدد درجات الحرية الالزمة لتنفيذ العملية يمكن تحديد السلسلة الحركية لتحقيق عدد درجات الحرية ضروريةوالمفاصل ال مشغالتوتحديد عدد ال للروبوت المناسبة تهابنيعمليات اللحام هي روبوتات تسلسلية أي أن إلنجازبوتات المستخدمة لرو ا .المطلوبة
الروبوت أذرع. كل ذراع من (1-5) كما هو مبين في الشكل مفتوحة األساسية هي سلسلة حركية. يؤمن كل مفصل في السلسلة الحركية دوراني الذي قبله بمفصل لذراعالتسلسلي يتصل مع ا
ليصل المؤثر النهائي درجات حرية خمس لعلى األقل نحتاج لذا المفتوحة درجة حرية واحدة. .[51] تجاه ضمن مجال عمل الروبوتاللروبوت ألي نقطة بالفراغ وبأي
تنفيذ عمليات اللحام لروبوت (1-5)الشكل
ذراع في الروبوتات التسلسلية يجب أن يتحمل كامل وزن وحمولة وكلكل مفصل لذا .أهم سلبيات الروبوتات التسلسلية حدأيعتبر وهذا ،العناصر التي تليه في السلسلة الحركية
وزنها اإلنشائي كبير فإن متينة، وبالتاليمفاصل تزود ببصالبة عالية و هياكلها صنعيجب أن ت منخفضة. وزنها اإلنشائيتكون فيها نسبة الحمولة التي تستطيع حملها إلى و

121
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:للروبوت التصميم الميكانيكي 5-2
كهيكل مناسب لتنفيذ هتصميمنقدم في هذا القسم من الدراسة وصف للروبوت الذي تم برنامج التصميم ستخدامابلدراسة حركة الروبوت وحريات حركته وقيودها قمنا مسارات اللحام.
التصميم الميكانيكي ويرتقي ليكون البرنامج وهو من أشهر برامج ، (SolidWorks)الميكانيكييوفر البرنامج بيئة ثالثية األبعاد للتصميم باإلضافة إلى خيارات بالغة في .المجال األول في هذا
.التصاميم كافة القوة للتعامل مع
فإن الروبوت يملك ،(2-5)المبين بالشكل قيد الدراسةوفقا للتصميم الميكانيكي للروبوت باستخدام خمس خمسة مفاصل دورانية أي يتمتع بخمس درجات حرية للحركة يتم تحقيقها
محركات خطوية بحيث يتحرك كل محرك بزاوية معينة إليصال المؤثر النهائي للروبوت إلى (.B)المخططات الميكانيكية التفصيلية ألجزاء الروبوت موضحة في الملحق الموقع المطلوب.
SolidWorksبرنامج الـ بروبوت مرسوم لتصميم الميكانيكي للا( 2-5)الشكل
أطوال أذرع الروبوت: 5-2-1
فإن مبدأ كما هو مبين . بالسنتيمتر المصمم أطوال أذرع الروبوت (3-5)الشكل يوضحالقاعدة مستوي يقعان في حيث المحورين .قاعدة الروبوتيتوضع في منتصف حداثيات اإل
.لألعلىيتعامد معهما ويتجه والمحور
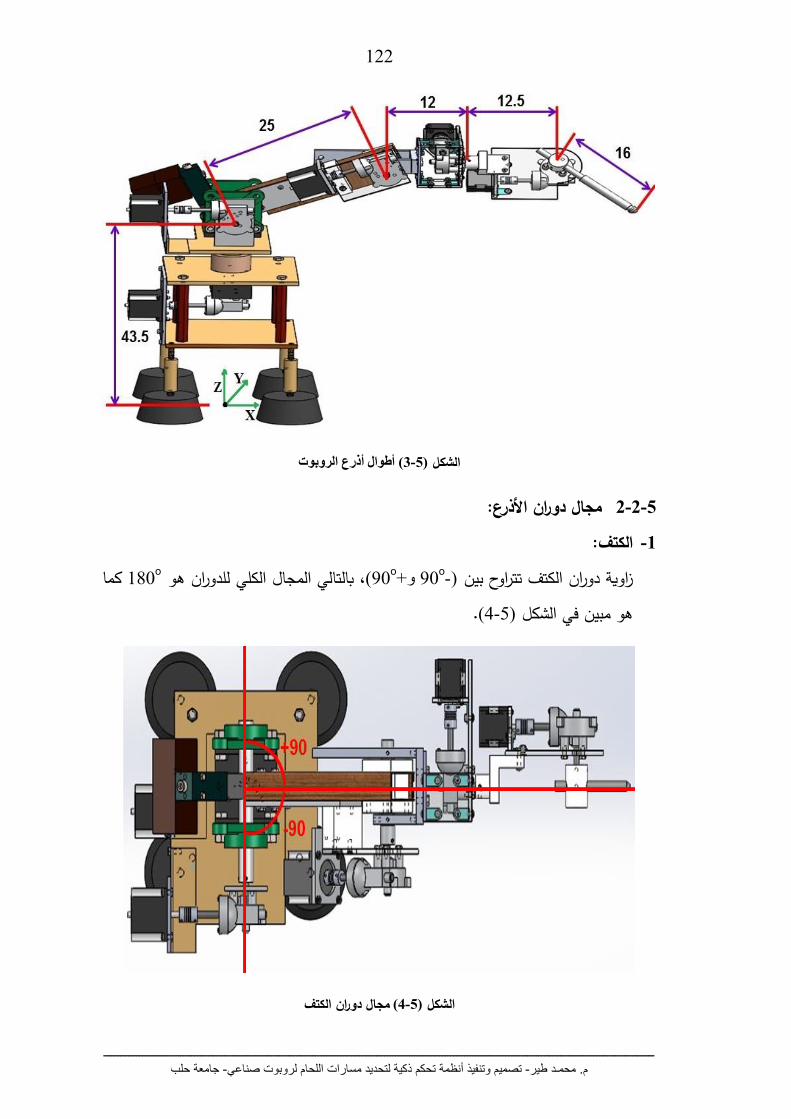
122
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
أطوال أذرع الروبوت (3-5)الشكل
مجال دوران األذرع: 5-2-2 :الكتف -1
-)تراوح بين تزاوية دوران الكتف o
و+ 90o
oهو للدورانلمجال الكلي ، بالتالي ا(90كما 180
.(4-5)هو مبين في الشكل
دوران الكتفمجال (4-5)الشكل

123
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الزند: -2و+ o60-) تراوح بينتالزند دوران زاوية
o ،o45+ـب األفق يميل عنوذلك بالنسبة لمستوي (45
oهو للدورانوبالتالي فإن المجال الكلي .(5-5)كما هو مبين في الشكل 105
الزند دوران مجال (5-5)الشكل
الرسغ: -3و+ o60-) الرسغ تتراوح بين دوران زاوية
oوبالتالي ، األفقوذلك بالنسبة لمستوي يوازي (90
oهو للدورانفإن المجال الكلي .(6-5)كما هو مبين في الشكل 150
الرسغ دوران مجال (6-5)الشكل

124
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:زاوية دوران أفقية للمؤثر النهائي -4و+ o120-) تراوح بينت مؤثر النهائيدوران أفقية لل زاوية
oالمجال الكلي فإنوبالتالي ،(120
oهو لدورانل .(7-5)كما هو مبين في الشكل 240
المؤثر النهائيفتل مجال (7-5)الشكل
لمؤثر النهائي:زاوية دوران عمودية ل -5
-)تراوح بين ت مؤثر النهائيدوران عمودية لل زاويةo
+و 90o
جال الكلي وبالتالي فإن الم، (135oهو للدوران
.(8-5)كما هو مبين في الشكل 225
المؤثر النهائيانحناء زاوية مجال (8-5)الشكل
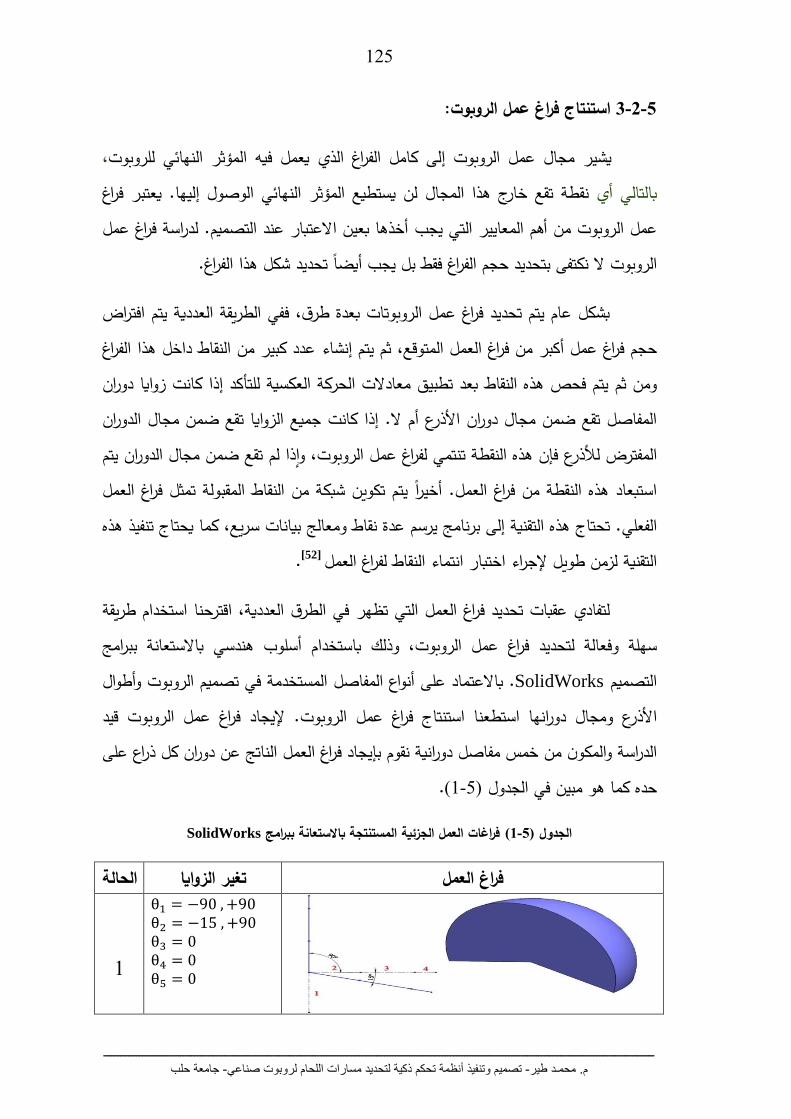
125
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
فراغ عمل الروبوت:استنتاج 5-2-3
، للروبوت المؤثر النهائيمل فيه عيالفراغ الذي كامل إلى الروبوت عملمجال يشير فراغيعتبر ا.الوصول إليه المؤثر النهائيستطيع يلن مجالخارج هذا التقع نقطة بالتالي أي
عمل فراغدراسة . لأخذها بعين االعتبار عند التصميممن أهم المعايير التي يجب روبوت العمل .الفراغتحديد شكل هذا أيضا بل يجب الفراغ فقطكتفى بتحديد حجم نالروبوت ال
افتراضيتم في الطريقة العددية ف ،طرق عدة عمل الروبوتات بفراغ بشكل عام يتم تحديد الفراغداخل هذا قاطعدد كبير من النثم يتم إنشاء ،العمل المتوقع فراغعمل أكبر من حجم فراغزوايا دوران كانت بعد تطبيق معادالت الحركة العكسية للتأكد إذايتم فحص هذه النقاط ومن ثم
جميع الزوايا تقع ضمن مجال الدوران إذا كانت . المفاصل تقع ضمن مجال دوران األذرع أم الذا لم الروبوت، عمل لفراغفإن هذه النقطة تنتمي لألذرع المفترض يتم تقع ضمن مجال الدورانوا
العمل فراغتمثل المقبولة يتم تكوين شبكة من النقاط أخيرا .العمل فراغاستبعاد هذه النقطة من تنفيذ هذه حتاج، كما يسريع بيانات نقاط ومعالج عدة . تحتاج هذه التقنية إلى برنامج يرسمالفعلي . [52]فراغ العمللزمن طويل إلجراء اختبار انتماء النقاط ل التقنية
تخدام طريقة اس اقترحنا، العمل التي تظهر في الطرق العددية فراغتحديد عقباتلتفادي برامج ب باالستعانة هندسي أسلوب باستخدام، وذلك روبوتالعمل فراغسهلة وفعالة لتحديد
وأطوال المستخدمة في تصميم الروبوت أنواع المفاصلاالعتماد على ب .SolidWorksالتصميم روبوت قيد الفراغ عمل يجادإل. روبوتالعمل فراغاستنتاج استطعناومجال دورانها األذرع
دوران كل ذراع على الناتج عن فراغ العملقوم بإيجاد ن خمس مفاصل دورانيةالدراسة والمكون من .(1-5)كما هو مبين في الجدول حده
SolidWorksبرامج ب باالستعانةالمستنتجة فراغات العمل الجزئية (1-5) الجدول
الحالة الزواياتغير فراغ العمل
1

126
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الحالة الزواياتغير فراغ العمل
2
3
3
3
4
5
3
6

127
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
.(9-5) في الشكلكما هو مبين الكلي فراغات العمل الجزئية نحصل على فراغ العمل بدمج
فراغ العمل الكلي (9-5)الشكل
بطرح فراغ العمل الذي يحوي النقاط التي ال يستطيع المؤثر النهائي الوصول إليها أخيرا نحصل على فراغ العمل النهائي للروبوت (10-5)كما هو مبين في الشكل بسبب قيود حركته
.(11-5)الموضح في الشكل
يصل إليها المؤثر النهائيطرح مجال العمل الذي يحوي النقاط التي ال (11-5)الشكل
فراغ العمل النهائي للروبوت (11-5)الشكل

128
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لروبوت:اتصنيع 5-3
:هيكل الروبوت 5-3-1
من قطعتتألف من (12-5)كما هو مبين في الشكل ذرع الروبوتاألجزاء الميكانيكية أللتثبيت اعدةتم تصنيع قكما مثبتة ببراغي مع بعضها البعض. والبالستيك األلمنيوم الحديد و وهي (AU-TER-IWR)، كما اقترحنا تسميته لكل ذراع على حده مع علبة السرعة المحرك
.(Aleppo University-Ter-Intelligent Welding Robot)اختصار لـــــــ
الروبوت المصنعنموذج (12-5)الشكل
:شغالتالم 5-3-2. (13-5) لـــــللروبوت كما هو مبين في الشك وية كمشغالتــات الخطـالمحرك رنااختلقد
، كباقي المحركات الكهربائية مبدأ عملهاو محركات الخطوة هي محركات يتم التحكم بها رقميا ولكن ، الثابت والدوارالجزء بين تشابك الفيض المغناطيسيعلى مبدأ اعتمد في دورانهت حيث
دور عددا محددا من الدرجات )خطوة( في كل مرة تطبق فيها نبضة ييمتاز المحرك الخطوي بأنه . إن عدد الدرجات في الخطوة الواحدة [53]على دارة خاصة تستخدم للتحكم بمحرك الخطوة
درجة. (90)درجة أو كبيرة وتصل إلى (0.72)لمحرك الخطوة يمكن أن تكون صغيرة إلى حد
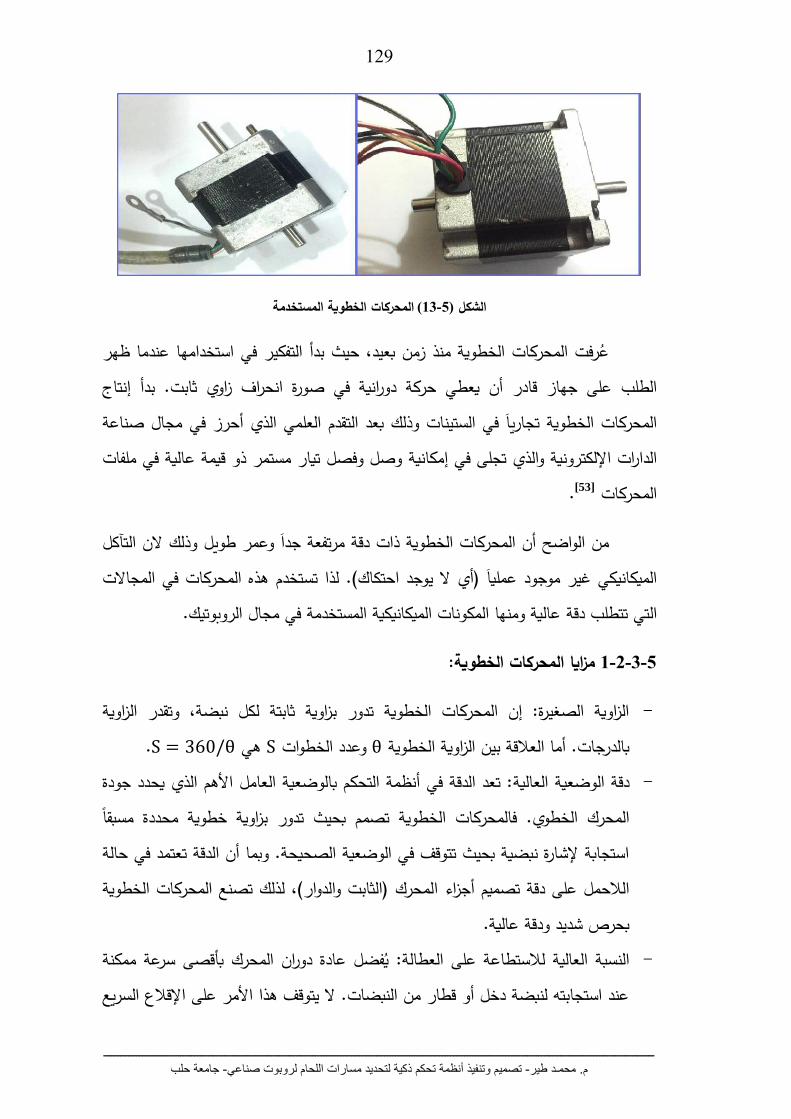
129
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المحركات الخطوية المستخدمة( 13-5)الشكل
عرفت المحركات الخطوية منذ زمن بعيد، حيث بدأ التفكير في استخدامها عندما ظهر الطلب على جهاز قادر أن يعطي حركة دورانية في صورة انحراف زاوي ثابت. بدأ إنتاج المحركات الخطوية تجاريا في الستينات وذلك بعد التقدم العلمي الذي أحرز في مجال صناعة
وصل وفصل تيار مستمر ذو قيمة عالية في ملفات إمكانيةوالذي تجلى في اإللكترونيةالدارات .[53] المحركات
من الواضح أن المحركات الخطوية ذات دقة مرتفعة جدا وعمر طويل وذلك الن التآكل الميكانيكي غير موجود عمليا )أي ال يوجد احتكاك(. لذا تستخدم هذه المحركات في المجاالت
عالية ومنها المكونات الميكانيكية المستخدمة في مجال الروبوتيك. التي تتطلب دقة
مزايا المحركات الخطوية: 5-3-2-1
الزاوية الصغيرة: إن المحركات الخطوية تدور بزاوية ثابتة لكل نبضة، وتقدر الزاوية - . 3 هي وعدد الخطوات بالدرجات. أما العالقة بين الزاوية الخطوية
: تعد الدقة في أنظمة التحكم بالوضعية العامل األهم الذي يحدد جودة العالية دقة الوضعية -المحرك الخطوي. فالمحركات الخطوية تصمم بحيث تدور بزاوية خطوية محددة مسبقا استجابة إلشارة نبضية بحيث تتوقف في الوضعية الصحيحة. وبما أن الدقة تعتمد في حالة
لمحرك )الثابت والدوار(، لذلك تصنع المحركات الخطوية الالحمل على دقة تصميم أجزاء ا بحرص شديد ودقة عالية.
دوران المحرك بأقصى سرعة ممكنة يفضل عادةعلى العطالة: ستطاعةلالالنسبة العالية -عند استجابته لنبضة دخل أو قطار من النبضات. ال يتوقف هذا األمر على اإلقالع السريع

130
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
السريع المطلوب من هذا المحرك. إذا انقطع قطار النبضات ولكن يشمل أيضا التوقف والمحرك يدور بسرعة منتظمة، فعلى المحرك أن يكون قادرا على التوقف في الوضعية
إلى عطالة المحرك يجب أن تكون ستطاعةالمحددة بالنبضة األخيرة. هذا يعني أن نسبة اال .األخرى لتقليديةكبيرة في المحركات الخطوية مقارنة مع المحركات ا
حركات الخطوية:ممبدأ عمل ال 5-3-2-2
يبين نموذجا بسيطا (14-5)سنتعرف اآلن على مبدأ عمل المحرك الخطوي، الشكل درجة في الخطوة الواحدة يتكون القسم الثابت في هذا المحرك من (15)لمحرك خطوة يدور
صنع القسم المتحرك والذي يسمى الدوار درجة. ي (45)ثمانية أقطاب متباعدة عن بعضها بمقدار درجة. يطبق التيار (60)من مادة فيرو مغناطيسية وله ستة أسنان والزاوية بين كل سنين هي
على قطبين متقابلين أو على ملفين متقابلين في آن واحد كي يدور المحرك خطوة واحدة. يؤدي تطبيق التيار إلى مغنطة األقطاب المتعاكسة وهذا يجعل أسنان القسم الدوار تصبح على نفس
بتداء من الوضع درجة باتجاه عقارب الساعة ا (15)استقامة األقطاب المغذاة. لتدوير الدوار ذا فصلت التغذية عن (2)وتوصل إلى الملف (1)الحالي فإن التغذية تفصل عن الملف وا
درجة أخرى وتستمر عملية التحريك (15)يدور المحرك (3)ووصلت مع القطب (2)القطب بنفس الطريقة. كما يعكس تتالي تغذية الملفات عند الرغبة بتدوير المحرك بعكس عقارب
.الساعة
مبدأ عمل المحرك الخطوي (14-5)الشكل
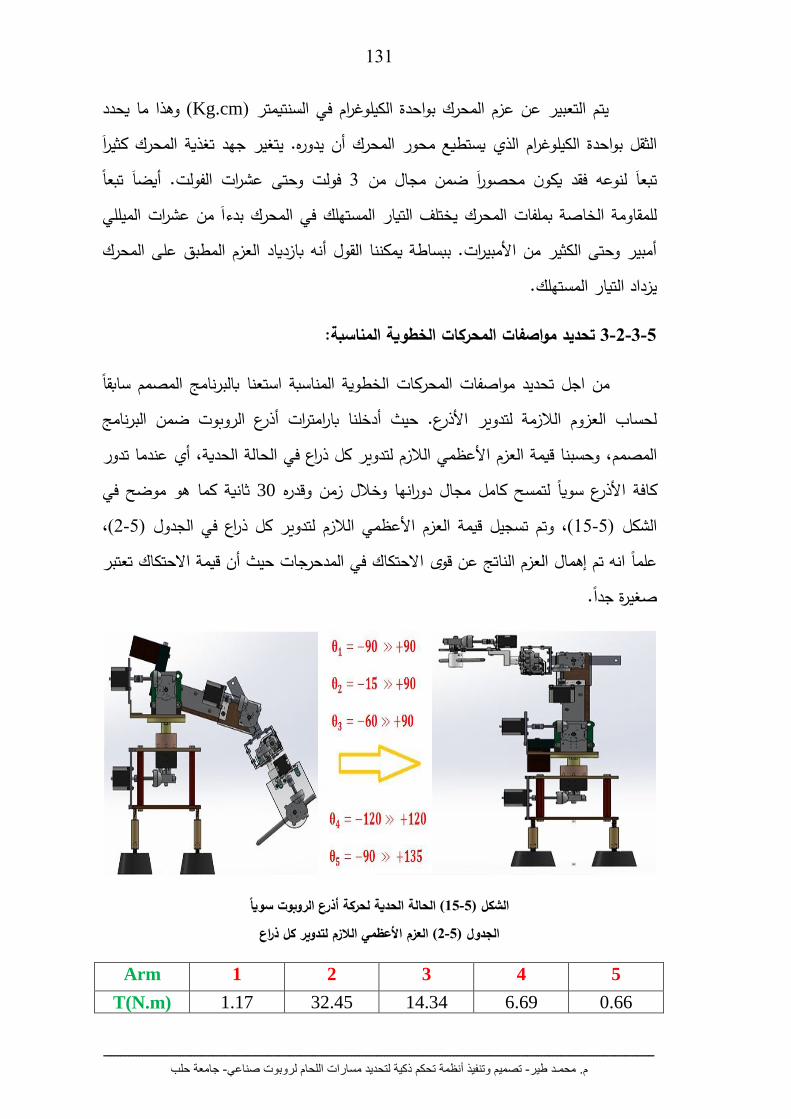
131
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وهذا ما يحدد (Kg.cm)متر ييتم التعبير عن عزم المحرك بواحدة الكيلوغرام في السنتالثقل بواحدة الكيلوغرام الذي يستطيع محور المحرك أن يدوره. يتغير جهد تغذية المحرك كثيرا
فولت وحتى عشرات الفولت. أيضا تبعا 3تبعا لنوعه فقد يكون محصورا ضمن مجال من للمقاومة الخاصة بملفات المحرك يختلف التيار المستهلك في المحرك بدءا من عشرات الميللي
العزم المطبق على المحرك بازديادأمبير وحتى الكثير من األمبيرات. ببساطة يمكننا القول أنه يزداد التيار المستهلك.
: المناسبة المحركات الخطويةتحديد مواصفات 5-3-2-3
سابقا بالبرنامج المصمم استعناالمناسبة من اجل تحديد مواصفات المحركات الخطوية برنامج الضمن الروبوت أذرعبارامترات أدخلنا. حيث األذرعلحساب العزوم الالزمة لتدوير
عندما تدور أي ،الحديةوحسبنا قيمة العزم األعظمي الالزم لتدوير كل ذراع في الحالة المصمم، في ح كما هو موض ثانية 30 وقدره خالل زمنو مجال دورانها لتمسح كامل كافة األذرع سويا
،(2-5)وتم تسجيل قيمة العزم األعظمي الالزم لتدوير كل ذراع في الجدول ، (15-5)الشكل االحتكاك في المدحرجات حيث أن قيمة االحتكاك تعتبر قوى انه تم إهمال العزم الناتج عن علما
صغيرة جدا .
الحالة الحدية لحركة أذرع الروبوت سويا (15-5)الشكل
العزم األعظمي الالزم لتدوير كل ذراع (2-5) الجدول
5 4 3 2 1 Arm
0.66 6.69 14.34 32.45 1.17 T(N.m)

132
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
علبة السرعة: 5-3-3
ذات عزم منخفض نسبيا إال األسواقعادة تكون المحركات الخطوية القياسية المتوفرة في على مسننات وي تاستخدام علبة سرعة تحهذا ما دعا إلى ضرورة في بعض الحاالت النادرة.
تخفيض سرعة الدوران ورفع العزم بنفس النسبة. بهدف
وتعتبر من أهم وسائل نقل القدرة بين تتواجد المسننات في معظم اآلالت الميكانيكية ة في الشكل ــموضح مسننات دودية على وي تتح جاهزة استخدمنا علبة سرعة المحاور الدوارة.
. (62\1) في السرعة نسبة تخفيضوتملك (5-16)
الدودية المستخدمة علبة السرعة (16-5)الشكل
أي ،المتعامدة التي ال تتقاطعتستعمل المسننات الدودية لنقل االستطاعة بين المحاور تقع في مستويين متعامدين وهي تحقق نعومة وهدوء في العمل. تتألف مجموعة المسننات الدودية
. [54] من برغي دودي له زاوية ميل أسنان تساوي زاوية ميل أسنان المسنن الدودي
المسننات بأنها تشغل حيز أقل من أجل أنواع تتميز المسننات الدودية مقارنة مع باقي تخفيض كبير للسرعة وتكبير للعزم في إلىضافة باإل ،التخفيض أو القدرة المنقولةنفس نسبة
هذه المزايا جعلت .بصمت دون ضجة لعموت مرحلة واحدة ومقاومة للصدمات والقوى المفاجئةبين ربطال تم تحقيقكما الروبوت.ار األمثل لنستخدمها في مجموعة المسننات الدودية هي الخي
.(17-5)الشكلمبينة في [55] بتركيب وصلة مرنة )قارنة(وعلبة السرعة الخطوي المحرك
وصلة مرنة )قارنة( (17-5)الشكل

133
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
قيمة العزم األعظمي الالزم لتدوير كل ذراع في الحالة الحدية بعد ربط يوضح (3-5)الجدول .علبة السرعة مع المحرك الخطوي
العزم األعظمي الالزم لتدوير كل ذراع بعد تركيب علبة السرعة (3-5) الجدول
5 4 3 2 1 Arm
0.01 0.11 0.23 0.51 0.027 T(N.m)
خطوية متوفرة في األسواق ومواصفاتها مدرجة في محركات بناءا على النتائج السابقة استخدمنا .(4-5)الجدول
للمحركات الخطوية المستخدمةمواصفات التقنية ال (4-5) الجدول
Torque N.m Current .Amp Step Angel Type Arm Motor
0.62 1.41 1.8° ± 0.09° Nanotech 1,2,3 1
0.25 0.7 1.8° ± 0.09° Nanotech 4,5 2
الحساسات: 5-3-4
( إلخ... سرعة - إزاحة –إضاءة –الفيزيائية )ضغط المقادير يحول جهاز هو الحساسالوظيفة األساسية للحساس هي تزويد نظام التحكم . (...إلختيار -)جهد كهربائية مقادير إلى
بالمعلومات لتوليد أعمال مناسبة تتطابق مع مواصفات محددة.
الحساس الضوئي: 5-3-4-1
اإلشارة تحويل في مهمته تكمن هو أحد أجهزة تحسس الموضعالرقمي الحساس الضوئي الحساسات الضوئية شعاع ضوئي معدل ينعكس أو ينكسر تصدر .[56] رقمية إشارة إلى الضوئية
بهدف إنقاص أثر وذلك بالجسم الهدف. اإلضاءة المعدلة تزيد مجال اإلحساس اصطدامهعند الضوء في الوسط المحيط، وبالتالي يستطيع الحساس الضوئي تمييز الضوء المعدل عنتشويش
المحيط.األضواء األخرى في الوسط بقية
حساس ضوئي (18-5)الشكل

134
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
)منبع ضوئي( ومستقبل لتحسس الضوء المرسل من مرسل ألفالحساس الضوئي يتلكترونية لتقدير وتضخيم اإلشارة المستقبله. يرسل الضوء المعدل كنبضات ذات تردد إودارة
تكون . المنابع الضوئية التي تستخدم عادة في هذه الحساسات (kHz 30-5)ضمن المجالضمن مجال الطيف الضوئي وتتراوح بين الضوء األخضر المرئي إلى األشعة تحت الحمراء
.(19-5)كما هو مبين في الشكل الغير مرئية
الطيف الضوئي (19-5)الشكل
ع الصفر المرجعي ألذرع الروبوت. ضحساس ضوئي رقمي بهدف تحديد مو ستخدمنا ا( للضوء باعث ديود) حيث يكون المرسل، (Thru-Beam)حساس يعتمد تقنية مسح تدعى هذا ال
ويثبتان بشكل متقابل بطريقة تضمن منفصالن عن بعضهما، (ضوئي ترانزستور) والمستقبلكما هو وصول أعظم كمية من الشعاع الضوئي المرسل من جهاز اإلرسال إلى جهاز االستقبال
والمستقبل فإنه يمنع الشعاع الضوئي . عند مرور جسم ما بين المرسل (20-5مبين في الشكل )من الوصول إلى المستقبل وبالتالي يدفع المستقبل إلى تغيير حالة تماس خرجه، وعندما يبتعد الجسم من بين المرسل والمستقبل فإن خرج المستقبل يعود إلى حالته الطبيعية. هذا النوع من
كنه ال يناسب العمل مع األجسام الحساسات مناسب للعمل مع األجسام الداكنة والعاكسة، ول .الشفافة
Thru-Beamتقنية المسح (21-5)الشكل
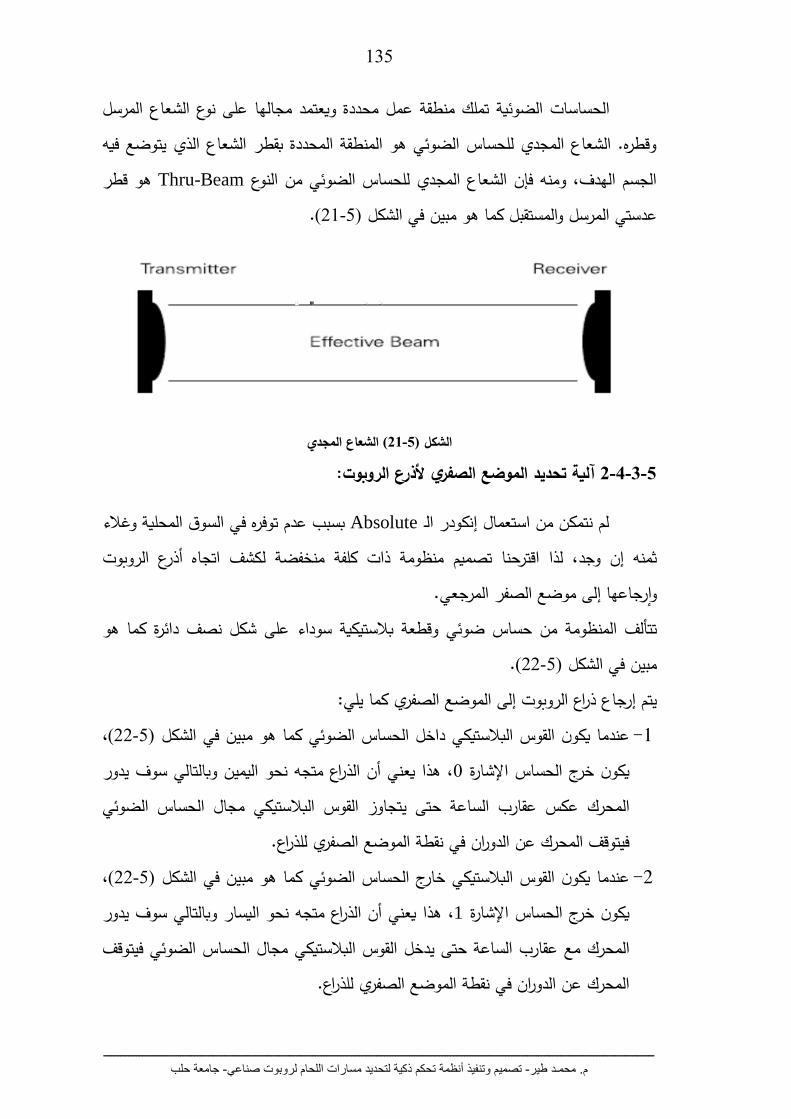
135
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الحساسات الضوئية تملك منطقة عمل محددة ويعتمد مجالها على نوع الشعاع المرسل وقطره. الشعاع المجدي للحساس الضوئي هو المنطقة المحددة بقطر الشعاع الذي يتوضع فيه
هو قطر Thru-Beamالجسم الهدف، ومنه فإن الشعاع المجدي للحساس الضوئي من النوع .(21-5)كما هو مبين في الشكل عدستي المرسل والمستقبل
الشعاع المجدي (21-5)الشكل
لية تحديد الموضع الصفري ألذرع الروبوت:آ 5-3-4-2
وغالء في السوق المحليةه بسبب عدم توفر Absolute ـإنكودر ال لم نتمكن من استعمالاتجاه أذرع الروبوت كشفل منظومة ذات كلفة منخفضةتصميم اقترحنا الذثمنه إن وجد،
رجاعها .المرجعي إلى موضع الصفروا كما هو دائرة نصفعلى شكل سوداء بالستيكيةمن حساس ضوئي وقطعة المنظومة تتألف
. (22-5)مبين في الشكل كما يلي: ي الصفر الموضع الروبوت إلى ذراع يتم إرجاع
، (22-5)كما هو مبين في الشكل داخل الحساس الضوئي البالستيكيعندما يكون القوس -4يدور ، هذا يعني أن الذراع متجه نحو اليمين وبالتالي سوف 0يكون خرج الحساس اإلشارة
مجال الحساس الضوئي البالستيكيتجاوز القوس حتى ي الساعةعكس عقارب المحرك الصفري للذراع.موضع الفي نقطة فيتوقف المحرك عن الدوران
،(22-5)كما هو مبين في الشكل خارج الحساس الضوئي البالستيكيالقوس كون يعندما -3يدور وبالتالي سوف متجه نحو اليسارهذا يعني أن الذراع ،1يكون خرج الحساس اإلشارة
مجال الحساس الضوئي فيتوقف بالستيكيالقوس الحتى يدخل مع عقارب الساعة المحرك .للذراع في نقطة الموضع الصفري المحرك عن الدوران
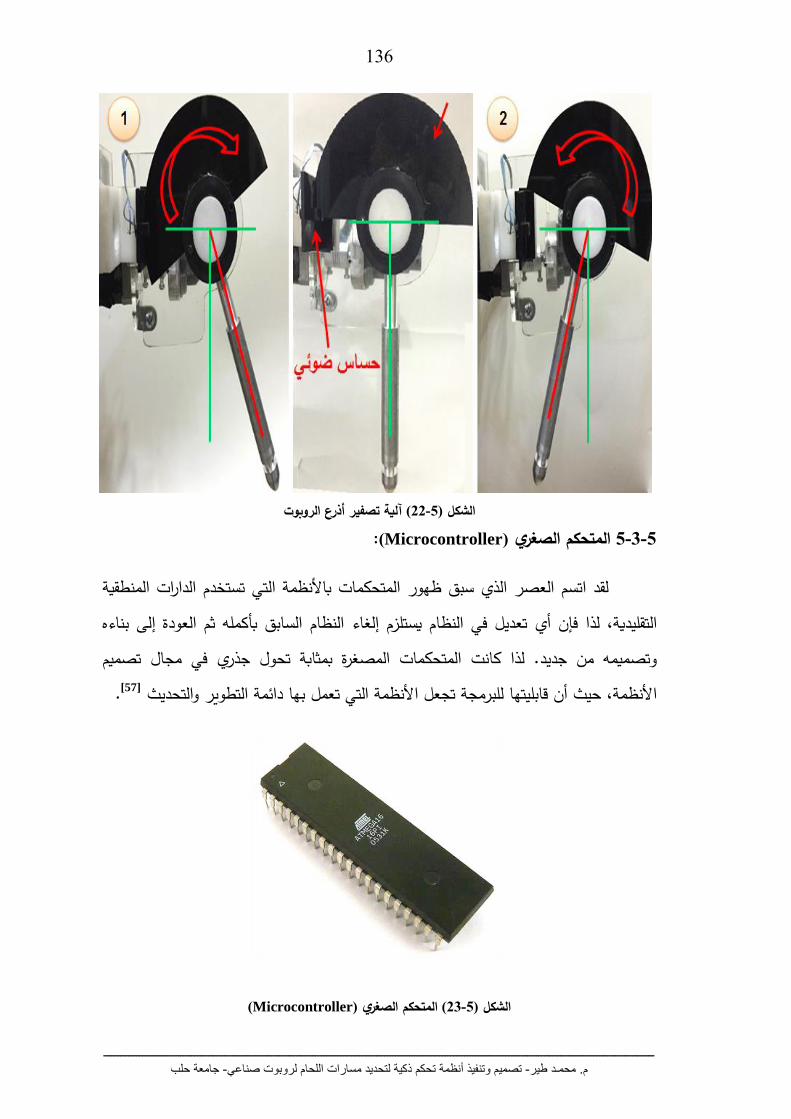
136
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
آلية تصفير أذرع الروبوت (22-5)الشكل
:(Microcontroller)المتحكم الصغري 5-3-5
لقد اتسم العصر الذي سبق ظهور المتحكمات باألنظمة التي تستخدم الدارات المنطقية هءالسابق بأكمله ثم العودة إلى بناالنظام إلغاءفإن أي تعديل في النظام يستلزم ، لذا التقليدية
كانت المتحكمات المصغرة بمثابة تحول جذري في مجال تصميم الذ .وتصميمه من جديد .[57] حيث أن قابليتها للبرمجة تجعل األنظمة التي تعمل بها دائمة التطوير والتحديث ،األنظمة
(Microcontroller)الصغري المتحكم (23-5)الشكل

137
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
هي: من وحدات أساسية الصغري يتألف المتحكم
.(Central Processing Unit CPU)المركزية وحدة المعالجة -4 .(Random Access Memory RAM)ذاكرة مؤقتة عشوائية -3 .(EEPROM)ذاكرة قابلة للقراءة والكتابة -2 .(Input\Output Units) وحدات الدخل والخرج -1 الرقمية وغيرها.-التشابهيةطرفيات داخلية مثل العدادات والمقارنات التشابهية والمحوالت -5
شريحة واحدة بعكس وتكون مدمجة على تشكل هذه الوحدات البنية األساسية للمتحكم كما توجد (RAM)لذاكرة خرى وأ (ROM)ذاكرة لجات التي توجد لها شرائح خاصة لالمعا
.شرائح خاصة بمنافذ الدخل والخرج
ولكن مع (Assembly)تتم برمجة المتحكمات بشكل أساسي باستخدام لغة التجميع التطور التكنولوجي في صناعة المتحكمات، تم البحث عن طرق أسهل للبرمجة وكان الحل
.(High level languages)باستخدام لغات برمجة عالية المستوى
:(AVR)من النوع (ATMEL)متحكمات شركة 5-3-5-1
، إذ (AVR)متحكمات ورة في عالم المتحكمات بإنتاجها ث (ATMEL)أحدثت شركة التي تتميز باألداء العالي وبالطاقة المنخفضة، واحتوت قائمة التعليمات (RISC)خدمت بنية است
132تصل في بعض المتحكمات إلى و تعليمة 118على أكثر من (AVR)في متحكمات خل المتحكم يعمل بشكل صحيح أن يبقى البرنامج دا (ATMEL)تضمن شركة . كما تعليمة على األقل. نواتس 10لمدة
:وهي بمجموعة ميزات (AVR)تتميز متحكمات
.توفرها في األسواق بكميات كبيرة
.سعرها المنخفض مقارنة مع ميزاتها
مرتفعة جدا في تنفيذ التعليمات ةسرع.
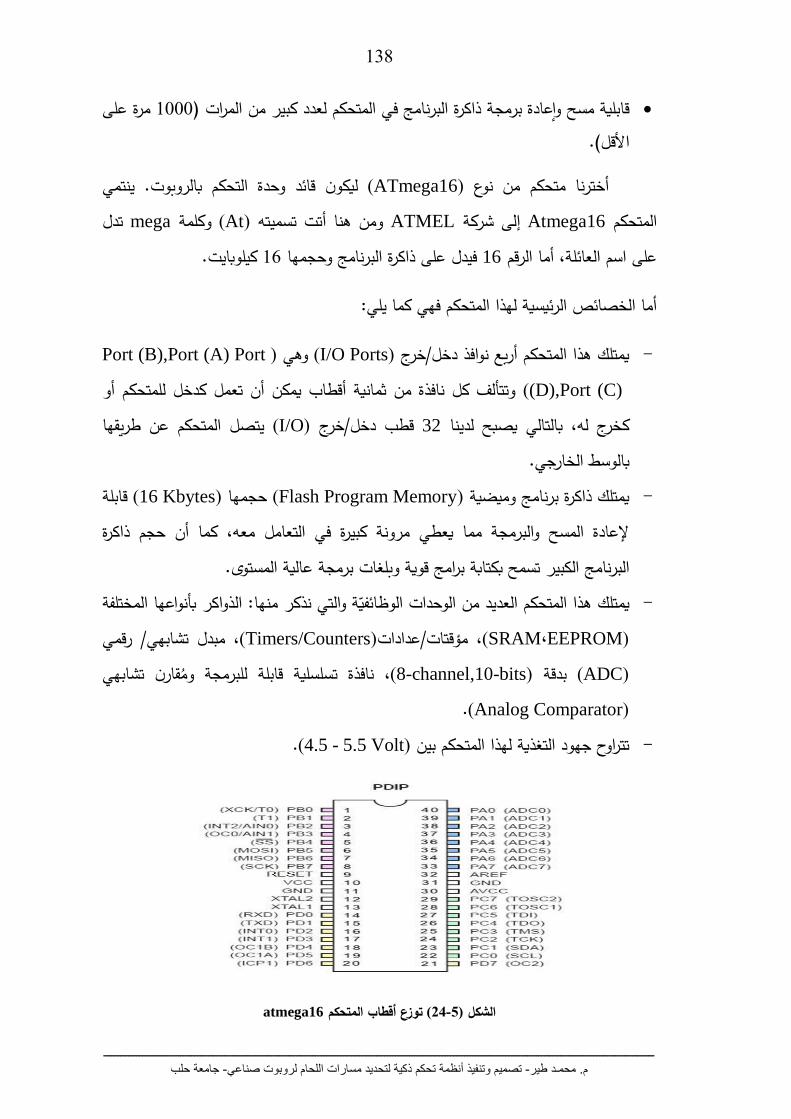
138
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
على مرة 1000)قابلية مسح وا عادة برمجة ذاكرة البرنامج في المتحكم لعدد كبير من المرات .(األقل
ينتمي روبوت.بالليكون قائد وحدة التحكم (ATmega16)أخترنا متحكم من نوع تدل megaوكلمة (At)ومن هنا أتت تسميته ATMELإلى شركة Atmega16المتحكم
كيلوبايت. 16 فيدل على ذاكرة البرنامج وحجمها 16، أما الرقم اسم العائلةعلى
أما الخصائص الرئيسية لهذا المتحكم فهي كما يلي:
Port (B),Port (A) Port)وهي (I/O Ports)يمتلك هذا المتحكم أربع نوافذ دخل/خرج -
(D),Port (C) ) وتتألف كل نافذة من ثمانية أقطاب يمكن أن تعمل كدخل للمتحكم أويتصل المتحكم عن طريقها (I/O)قطب دخل/خرج 32كخرج له، بالتالي يصبح لدينا
بالوسط الخارجي.قابلة (Kbytes 16)حجمها (Flash Program Memory)يمتلك ذاكرة برنامج وميضية -
ونة كبيرة في التعامل معه، كما أن حجم ذاكرة إلعادة المسح والبرمجة مما يعطي مر البرنامج الكبير تسمح بكتابة برامج قوية وبلغات برمجة عالية المستوى.
ذواكر بأنواعها المختلفة ال يمتلك هذا المتحكم العديد من الوحدات الوظائفية والتي نذكر منها: -(EEPROM،SRAM)مؤقتات/عدادات ،(Timers/Counters) مبدل تشابهي/ رقمي ،(ADC) بدقة(8-channel,10-bits) نافذة تسلسلية قابلة للبرمجة ومقارن تشابهي ،(Analog Comparator).
.(Volt 5.5 - 4.5)تتراوح جهود التغذية لهذا المتحكم بين -
atmega16أقطاب المتحكم توزع (24-5)الشكل
139
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:االتصالأدوات 5-3-6
القيادة عبر الحاسب في مراقبة وتأمين عملية انسياب المعلومات عبر منفذ مهمةتتمثل االتصال في كال االتجاهين للروبوت. المنـفذ هو مجموعة من خطوط نقل البيانات التي تستخدمها
مع المكونات األخرى. في بحثنا يؤمن منفذ وتبادل البيانات المعالجة المركزيـة لالتصال وحدةUSBمنفذيتمتع ، حيث [58]صال بين الحاسب والروبوتعملية االتUSB التالية: الرئيسية بالمزايا
.(Mb/s 480)تصل إلى نقل البيانات في عالية سرعة - USBعندما يقوم المستخدم بوصل جهاز ما على منفذ ، أي Playو Plugدعمه لتقنية -
يعمل الحاسب على كشف االتصال ويبحث عن برنامج القيادة المناسب لهذا الجهاز وكل الحاسب.ودون الحاجة إلعادة إقالع ذلك يتم خالل وقت قصير
نستخدم عدد أقل من األسالك )أربعة أسالك فقط(.لذا تقنية تسلسلية تعتب USBبما أن -
وهي: (25-5)مبين في الشكل هو كما USBيوجد نوعين من مآخذ
: يوجد على الحاسب.Aمأخذ من النوع -4 الروبوت.ب التحكم: يوجد على دارة Bمأخذ من النوع -3
وهي خطين للتغذية وخطين لنقل المعطيات. ،أربعة خطوط USBفي كال النوعين يستخدم منفذ
USBوظائف أقطاب منفذ (25-5)الشكل

140
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
دارات التحكم والقيادة: 5-3-7
:دارة الربط بين المتحكم والحاسب 5-3-7-1
بين المتحكم والحاسب من خالل المنفذ التسلسلي وذلك لعدة ةال يمكن الربط مباشر ، أما المنفذ TTLأسباب أهمها أن المنفذ التسلسلي في المتحكم يتعامل مع البيانات وفق منطق
الفرق بينهما أنه في . (RS–232)التسلسلي في الحاسب فيتعامل مع البيانات وفق منطق 1فولت فتمثل حالة 5المنطقي، أما القيمة 0فولت تمثل حالة 0 تعتبر القيمة TTLالمنطق 12-منطقي والقيمة 0فولت تمثل حالة 12+فإن القيمة (RS–232)أما في منطق ،منطقي
للربط (26-5) الشكلموضحة في وسيطة ةدار لذا البد من استخداممنطقي. 1فولت تمثل حالة يتم إنتاج هذه الدارة من قبل عدة .المتحكمبين المنفذ التسلسلي في الحاسب والمنفذ التسلسلي في
شركات وال بد من االطالع على طريقة توصيل هذه الدارة من خالل صفحة البيانات المرفقة والتي تقوم بنشرها الشركة المصنعة.
المتحكم والحاسبدارة الربط بين (26-5)الشكل
القادمة من المتحكم إلى إشارات منطقية يستطيع الحاسب التعامل شاراتاإل دارةتحول هذه ال :زاياولها عدة م USBمعها من خالل المنفذ التسلسلي
.MB 1وحتى KB 300 سرعة اتصال من -4 .Byte 384بطول FIFOذاكرة استقبال وسيطية من نوع تحوي -3 .Byte 128بطول FIFOذاكرة إرسال وسيطية من نوع تحوي -2

141
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:الخطوي دارة قيادة المحرك 5-3-7-2
يتم التحكم بالمحرك الخطوي بشكل عام عن طريق سلسلة من النبضات المرسلة إلى ، ثنائية القطبيةخطوية محركات للروبوت المصنع هي أقطاب المحرك. المحركات المستخدمة
أسالك. أربعة أسالك منها يتم وصلهما ببعضهما إلى قطب التغذية 8 حيث لهذه المحركات الموجب، أما األسالك األربعة الباقية فهي للتحكم بخطوة المحرك.
:التالية الرئيسية من العناصر (27-5)الموضحة في الشكل المحرك الخطوي دارة قيادةتتألف
ديودات ثمان(L6210) لقصر التيارات العكسية الناتجة عن الملفات عند وصل وفصل التغذية.
دارة متكاملة(L297) تملك أربعة أقطاب تحكم رئيسية قيادة ملفات المحرك ل(Enable،Half/Full ،cw/ccw، Clock).
دارة متكاملة(L298) .مسؤولة عن تبديل التغذية بين أقطاب المحرك
دارة القيادة صر ناع (27-5)الشكل
القيادة دارة تتميز. محركات خطوية خمسلقيادة صناعه محليةدارات خمستم استخدام بأنها: (28-5) الشكلالمستخدمة المبينة في
.(4wire, 6wire, 8wire)تدعم المحركات ثنائية القطبية -4 .2Aتيار حمل أعظمي -3 .5Vجهد أعظمي -2 خطوة أو نصف خطوة.نظام العمل ب -1

142
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
دارة قيادة المحرك الخطوي (28-5)الشكل
الروبوت:ب التحكمدارة 5-3-7-3
تتألف من:( 29-5)مبينة في الشكل متكاملة دارة صممناالروبوت قيادةل
.ات الخطويةقيادة المحرك راتدالخذ آمخمسة -4 .الروبوت ألذرعالموضع الصفري اتحساسالقادمة من اتاإلشار خذ لقراءة آمخمسة -3شركة إنتاجمن Nexus هانوع USBمع الحاسب عبر منفذ المتحكم وحدة لربط -2
Nawatlab. .ATMELشركة إنتاجمن AVRمن عائلة AtMega16 متحكم -1
دارة قيادة الروبوت (29-5)الشكل
دارة التغذية: 5-3-7-4
جاهزة متوفرة ةـدارة تغذي استخدمنا الخطوية اتم والمحركـاسبة للمتحكـة المنـن التغذيـأميـلترة من جسر توحيد لتحويل التيار اتتألف الد .(30-5) ي الشكلــف ةـموضح في السوق المحلي
.فولت 5المتناوب إلى تيار مستمر ومكثفات تنعيم ومنظم

143
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المستخدمة دارة التغذية (30-5)الشكل
االختبارات العملية والنتائج: 5-4
حيث، دقة حركة المؤثر النهائي بهدف اختبار على الروبوت أجرينا بعض التجاربالقيم تسجيل تم .لقياس موقع المؤثر النهائي للروبوت إلكترونيبياكوليس و بورق مليمتري استعنا
بعد حركة المؤثر النهائي إلى نقطة يدويا المقاسةالقيم و المفترضة إلحداثيات المؤثر النهائيدراج نسبة الخطأحساب تم و الهدف، .(5-5) لالقيم ضمن الجدو جميع وا
نتائج اختبار دقة حركة المؤثر النهائي للروبوت (5-5) جدولال
Error % Target coord
Actual(mm)
Target coord
Simulated (mm)
Case
0.08
0.05
0.06
0.13
0.09
0.08
3
0.04
0.10
0.03
3 3
33 3 3
3
0.10
0.04
0.03
3
3

144
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وبين الروبوتمقارنة بين النتائج التي حصلنا عليها عند اختبار (6-5)يبين الجدول كما نتيجة اختبار روبوت يملك خمس درجات حرية مصنع من قبل شركة متخصصة بصناعة
.[18] المخبريةالروبوتات
وروبوت مخبري الروبوت اختبارمقارنة بين نتائج (6-5) جدولال
الروبوت %الخطأنسبة متوسط
0.050
0.070
0.087 قيد الدراسة
AU-TER-IWR
0.030
0.068
0.078 [18]روبوت
Lab-Volt R 5150 في ارتفاع نسبة الخطأ أسباب إال أن تائج،النإلى تقارب كبير بين المقارنة تشير نتائج
لروبوتالمستخدمة في تصنيع ا المكونات الميكانيكية قد يعود إلى AU-TER-IWRالروبوت حساس الموضع الصفري دقة أو المستخدمةتتعلق بدقة المحركات أسباب أخرى و دقة القياسأو
.لألذرع
الخالصة: 5-5
مراحل تصميم وتصنيع روبوت صناعي يملك خمس درجات ستعرضناافي هذا الفصل حيث وصفنا الروبوت وحددنا أطوال أذرعه ومجال دورانها باستخدام برنامج ،حرية
SolidWorksباالستعانة ببرنامج منهجية الستنتاج فراغ عمل الروبوت . كما قدمناSolidWorks . قيمة لحساباعتمدنا على الدراسة الديناميكية المنجزة في الفصل الثالث أيضا
مناسبةال الخطوية المحركاتمواصفات وبالتالي تحديد ،العزم األعظمي الالزم لتدوير كل ذراعأذرع الروبوت منظومة ذات كلفة منخفضة لكشف اتجاه صممناكما لتدوير أذرع الروبوت.
رجاعها إلى موضع الصفر المرجعي. المتطلبات التقنيةعرضنا التجهيزات و في نهاية الفصل وا اختبرنا أداء الروبوت المصمم. و لروبوتلالمستخدمة
145
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
دسالفصل السا ستخدامابضبط مسار اللحام تحديد و
تقانات الرؤية الحاسوبية
146
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقدمة: 6-1
الكاميرات، صناعة للتقدم المستمر في تطوير الحواسيب وتقنيات معالجة الصورة و نظرا تعد الرؤية .واآللة اإلنسانمن الممكن استخدام هذه الموارد من أجل خلق وسيط بين ناآلأصبح
تهتم أهم مجاالت الذكاء الصنعي التي أحدثت ثورة في علم الرؤية للروبوتات. ىحدإالحاسوبية على بناءا أفعالد على التعلم واالستنتاج واتخاذ ردو اإلنسانحاسوبية بمحاكاة قدرة الرؤية ال
.مدخالت بصرية
الستخدامها في عدة ميادين السيما دعاتطور أنظمة الرؤية الحاسوبية وانتشارها السريع حدى أهم تطبيقات الرؤية الحاسوبية في العملية. إ فعاليتها في معظم التطبيقات أثبتت أنها
مثل تحديد موقع اإلنتاجيةالمعلومات من الصورة بهدف تطوير العملية تحصيلالصناعة هي أو فحص المنتجات لتقييم جودتها وبالتالي التأكد من ، لتقاطهاابواتجاه القطع لكي يقوم الروبوت
.فيها عدم وجود عيوب إنتاجية
باالعتماد لتحديد مسار اللحام رؤيةمنظومة وتنفيذ تصميم في الفصلتكمن أهمية هذا تحسين نوعية اللحام بحيث نضمن الحصول على دقة في تنفيذ اللحام وبالتالي على الليزر،
مدى كشف لضبط االرتفاع بين مشعل اللحام والمشغولة و الرؤية منظومةفيما بعد طورنا .وجودتهالخاص بروبوت اللحام تزويد نظام التحكمانحراف المشغولة عن الموقع االسمي، وبالتالي
.م مع الموضع الفعلي للمشغولةءلتصحيح مساره بما يتال الالزمة بالمعلومات
:الرؤية منظومة متطلبات 6-2 يجب أن تكون كلفتها منخفضة. - سهولة برمجتها وسرعة معالجة البيانات ضمن المنظومة. - .مطلوبةكافي إلنجاز جميع المهام ال أدائها سريع بشكل -بحيث ال يتضرر يجب أن يكون العتاد الصلب المكون لمنظومة الرؤية موثوقا لالستخدام -
في المحيط الصناعي.نتيجة الظروف البيئية يجب أن تملك المنظومة درجة عالية من السالمة، وأي خطأ ناتج عن المنظومة قد يعرض -
نتاج المتتالية للخطر.عمليات اإل
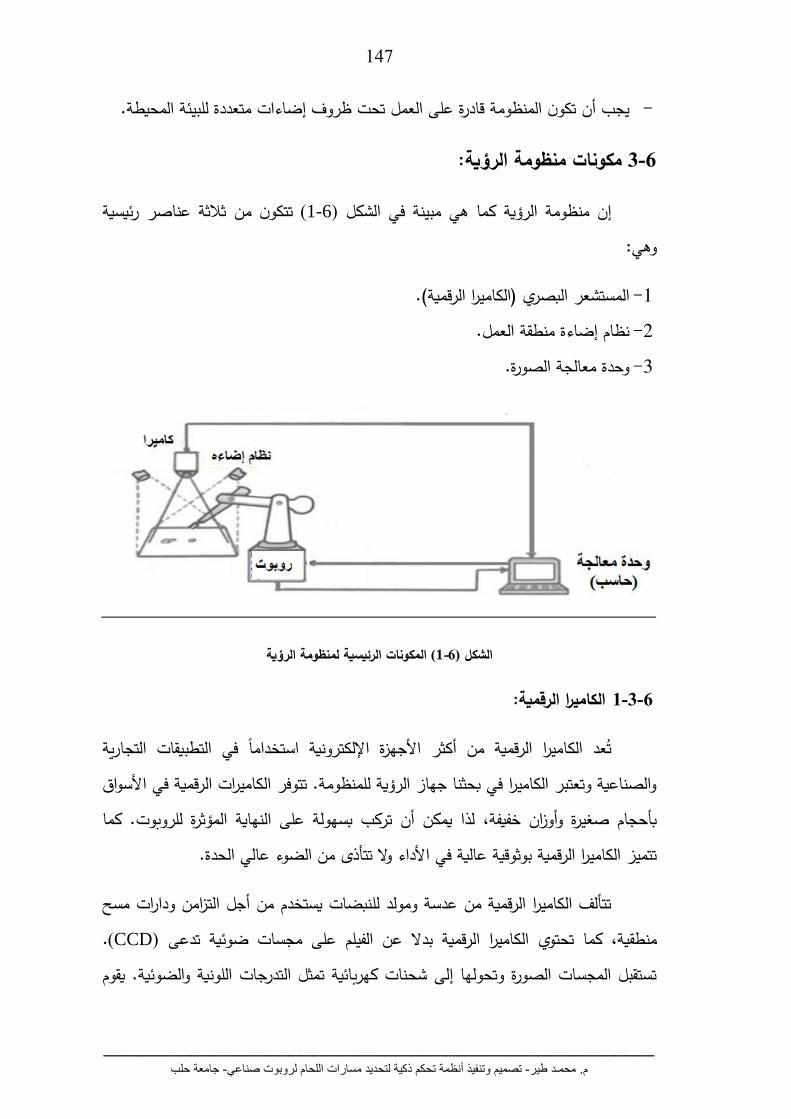
147
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
يجب أن تكون المنظومة قادرة على العمل تحت ظروف إضاءات متعددة للبيئة المحيطة. -
مكونات منظومة الرؤية: 6-3
ثالثة عناصر رئيسية كون منتت (6-1) كما هي مبينة في الشكلإن منظومة الرؤية وهي:
المستشعر البصري )الكاميرا الرقمية(. -4 العمل.منطقة نظام إضاءة -3 .وحدة معالجة الصورة -2
المكونات الرئيسية لمنظومة الرؤية (1-6)الشكل
الكاميرا الرقمية: 6-3-1
في التطبيقات التجارية استخداما اإللكترونيةتعد الكاميرا الرقمية من أكثر األجهزة والصناعية وتعتبر الكاميرا في بحثنا جهاز الرؤية للمنظومة. تتوفر الكاميرات الرقمية في األسواق
لذا يمكن أن تركب بسهولة على النهاية المؤثرة للروبوت. كما ،بأحجام صغيرة وأوزان خفيفة من الضوء عالي الحدة.تتميز الكاميرا الرقمية بوثوقية عالية في األداء وال تتأذى
نبضات يستخدم من أجل التزامن ودارات مسح للتتألف الكاميرا الرقمية من عدسة ومولد . (CCD)لم على مجسات ضوئية تدعى يكما تحتوي الكاميرا الرقمية بدال عن الف ،منطقية
تستقبل المجسات الصورة وتحولها إلى شحنات كهربائية تمثل التدرجات اللونية والضوئية. يقوم

148
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
كبر كلما كانت كمية ألكترونات فكلما كانت كمية الضوء إكل مجس بتحويل الضوء إلى لكترونات( أكبر ومن خالل قراءة الشحنة المتراكمة في كل خلية يمكن إالشحنات المتحررة )
.[59]سيسور إعادة بناء الصورة للميكروبرو
يعتبر البكسل هو حيث ،دعى البكسلت ماليين المربعات الصغيرة من الصورةتتكون الصورة كلما كانت الصورة في عدد البكسالت ازدادكلما و العنصر الرئيسي المكون للصورة
بجانب بعضها البعض بشكل متراص البكسالتعندما تجتمع كل تلك وذات حجم اكبر. أوضح صورة ناعمة وال تبدو أنها مكونة من مربعات. تظهر وكأنها
تعتبر المجسات الضوئية في الكاميرا الرقمية غير مدركة لأللوان وال تميزها، وذلك ألن لكي يتم قياس شدة الضوء وتحويله إلى شحنات كهربائية. يعتمد على عمل هذه المجسات مبدأكمـــا هـو مبيــن في وء ــــات للضـــــحـدام مرشـــد من استخـنه البإها فـوانـورة بكامل ألـالصاط ـالتق
بحيث يكون لكل لون من األلوان األساسية مرشح خاص به، فمثال المرشح ، (2-6)الشكل وتمنع فقط اللون األحمر مروراألحمر هو عبارة عن شريحة زجاجية ذات لون أحمر تسمح ب
لتقاطا . عندلون األخضروالللون األزرق ا لمرشحات بالنسبةالحال قي األلوان وكذلك بامرور فإنه يتم تحليل ألوان هذا المشهد إلى األلوان األساسية الثالث بالكاميرا ألي مشهد صورة
)األخضر واألزرق واألحمر( ومن ثم يتم تجميعها للحصول على المشهد بكافة ألوانه.
دور المرشح في التعرف على األلوان (2-6)الشكل
كما هي مبينة في (Web USB)هي من النوع هذا البحثالكاميرا المستخدمة في عن وتربط مع الحاسب مباشر مشهد فيديوبالتقاط صور أو هذه الكاميراتقوم . (6-3)الشكل
الكاميرا الرقميةيوضح مواصفات (6-1) الجدول .(USB)طريق منفذ االتصال التسلسلي ة في هذا البحث.المستخدم
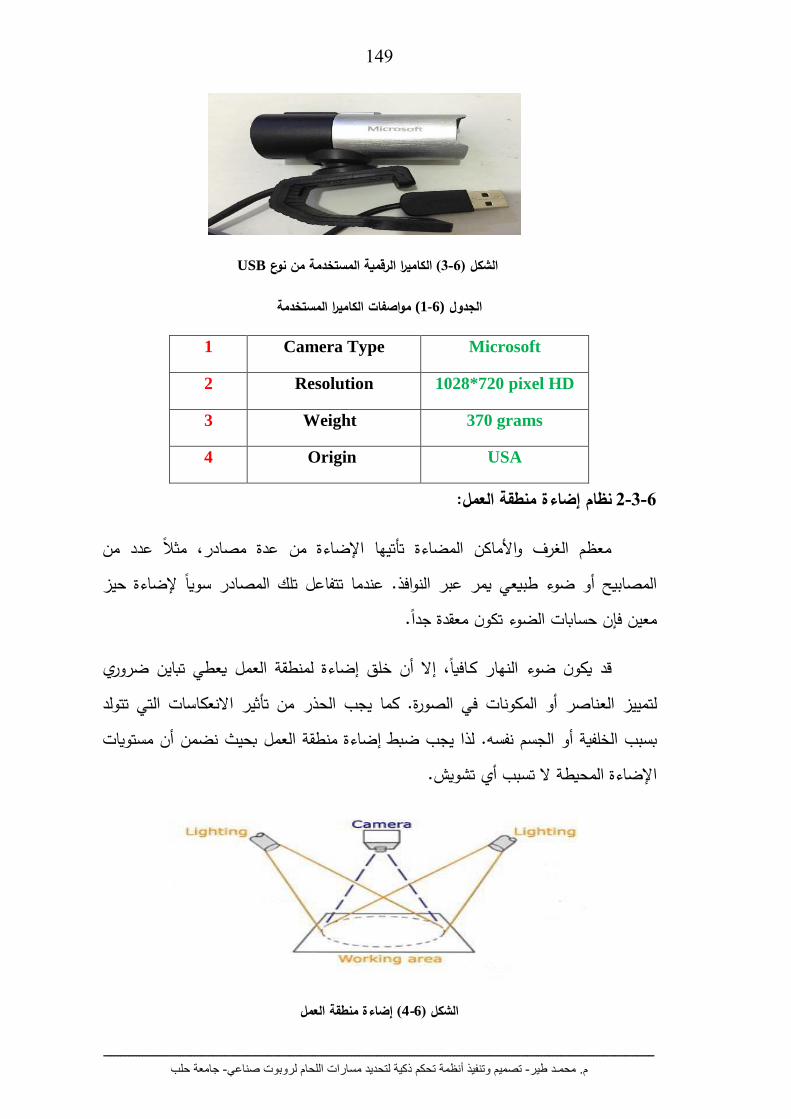
149
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
USBمن نوع المستخدمة رقميةالكاميرا ال (3-6)الشكل
مواصفات الكاميرا المستخدمة (6-1)الجدول
Microsoft Camera Type 1
1028*720 pixel HD Resolution 2
370 grams Weight 3
USA Origin 4
: منطقة العملنظام إضاءة 6-3-2
عدد من مثال ،عدة مصادرتأتيها اإلضاءة من المضاءة معظم الغرف واألماكن حيز إلضاءة تلك المصادر سويا عندما تتفاعل .النوافذيمر عبر يالمصابيح أو ضوء طبيع
.جدا معقدةفإن حسابات الضوء تكون معين
تباين ضروري يعطي لمنطقة العملإضاءة خلق ن ، إال أيكون ضوء النهار كـافيا قدمن تأثير االنعكاسات التي تتولد يجب الحذر كما في الصورة.تمييز العناصر أو المكونات ل
أن مستويات نضمن بحيثمنطقة العمل إضاءة لذا يجب ضبط. نفسه جسمال وأالخلفية بسبب أي تشويش.تسبب اإلضاءة المحيطة ال
منطقة العملإضاءة (4-6)الشكل
150
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وحدة معالجة الصورة: 6-3-3
المعالجة وهو وحدة ب،الحاسوحدة معالجة الصورة المستخدمة في هذا البحث هي من الكاميرا االستقبال يةبعمل طلب منها أداء عالي متمثال التي ي في منظومة الرؤية األساسية
السرعة .في كل لحظة زمنية األوامر إلى أدوات التنفيذ رسالومن ثم إوعملية معالجة الصورة تكون قادرة على االستمرار لذا يجب أنهي عامل أساسي في عمليات اإلنتاج في المعامل،
، وهذا يعني أن السرعة الرؤية المستخدمة لمنظومةقصى وغير معاقة بوقت المعالجة بالمعدل األ لوحدة المعالجة هي مطلب أساسي لرفع كفاءة منظومة الرؤية. العالية
فيديو إلى شـكل مناسب للمعالجة بواسطة يتم تحويل الصورة أو ال يةالرؤ منظومةفي مخزنة في ذاكرة الحاسب يمكنه بدء البيانات )صورة ، فيديو(عندما تصبح .المعالج المركزي
مخزنةمرجعية فحص الجسم ومقارنة صورته مع قوالب أو نماذج ومن ثم تحليل هذه المعطيات (معالجة الصورة الحاسب )وحدةالمطلوبة من تالي يمكن القول بأن المهام األساسية بالفيه مسبقا .
هي:
.الفيديو بشكل مستمر من الكاميرا الصور أواستقبال - وتنفيذ العمليات الحسابية المطلوبة.معالجة الصورة - للحاسب.االتصال عبر منافذ الروبوتبإلى وحدة التحكم المستنتجة إرسال اإلحداثيات -
.المستخدم في هذا البحث المحمول مواصفات الحاسبيوضح (6-2)الجدول
مواصفات الحاسب المستخدم (6-2)الجدول
SONY VAIO Computer Type 1
Intel ® core ™ I5-3210M @ 2.5 GHz Processor 2
4 GB Installed Memory (RAM) 3
64 bit System Type 4
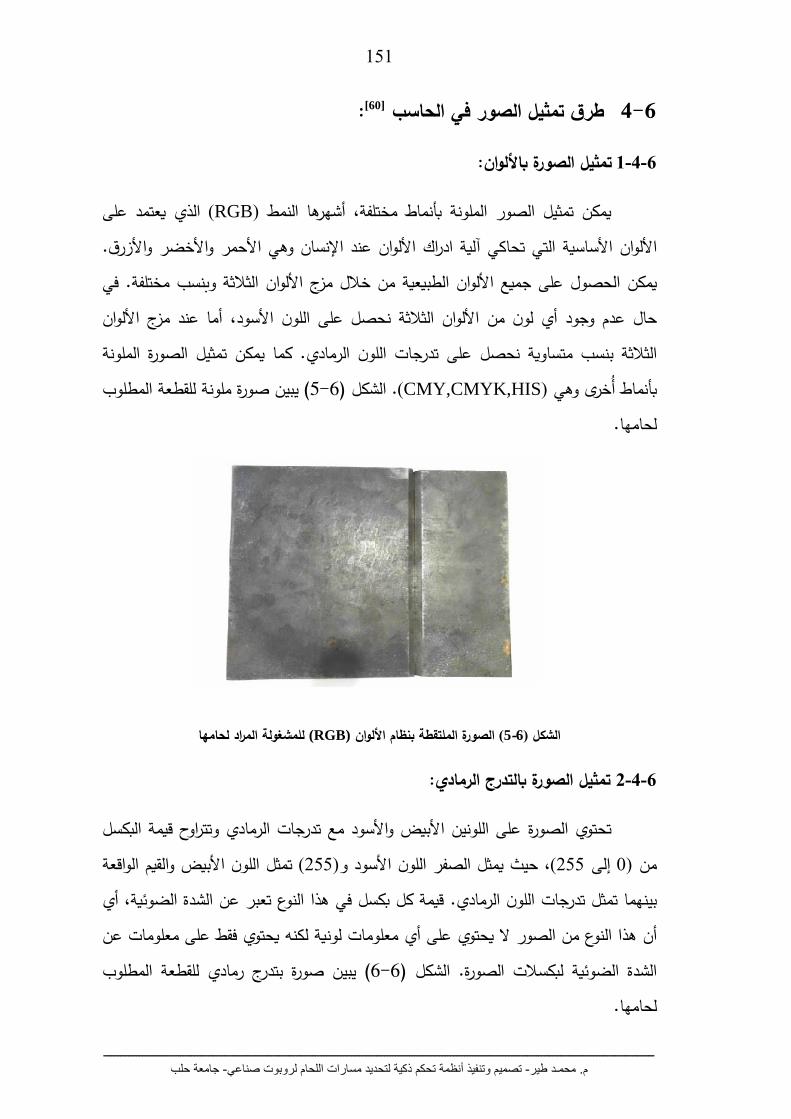
151
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:[60] طرق تمثيل الصور في الحاسب 6-4
لوان:باأل الصورة تمثيل 6-4-1
عتمد على ي الذي (RGB) أشهرها النمط يمكن تمثيل الصور الملونة بأنماط مختلفة، .هي األحمر واألخضر واألزرق و اإلنسانعند األلوانلية ادراك آالتي تحاكي األساسيةلوان األفي الثالثة وبنسب مختلفة. األلوانمن خالل مزج الطبيعية األلوانالحصول على جميع مكني
أما عند مزج األلوان ،األسودالثالثة نحصل على اللون األلوانحال عدم وجود أي لون من كن تمثيل الصورة الملونة كما يم الثالثة بنسب متساوية نحصل على تدرجات اللون الرمادي.
( يبين صورة ملونة للقطعة المطلوب 5-6الشكل ) .(CMY,CMYK,HIS) وهي خرى بأنماط أ لحامها.
للمشغولة المراد لحامها (RGB) بنظام األلوان الصورة الملتقطة (5-6)الشكل
بالتدرج الرمادي: الصورة تمثيل 6-4-2
وتتراوح قيمة البكسل على اللونين األبيض واألسود مع تدرجات الرمادي الصورة تحتوي والقيم الواقعة ألبيضاللون اتمثل (255)و األسودحيث يمثل الصفر اللون ، (255إلى 0)من
، أي قيمة كل بكسل في هذا النوع تعبر عن الشدة الضوئية .بينهما تمثل تدرجات اللون الرمادييحتوي فقط على معلومات عن همعلومات لونية لكن أيعلى ال يحتوي هذا النوع من الصورأن
( يبين صورة بتدرج رمادي للقطعة المطلوب 6-6الشكل )ت الصورة. الشدة الضوئية لبكسال لحامها.

152
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بنظام التدرج الرمادي للمشغولة المراد لحامها الصورة الملتقطة (6-6)الشكل
الصورة الثنائية: 6-4-3
0الصورة بإحدى القيمتين في عن قيمة كل بكسل الصور ويتم التعبير أنواعبسط أهي كما تمتاز هذه الصورة بصغر حجمها وقلة التفاصيل التي ،األبيضلون ل 4الـ و األسودللون
إذا كانت بحيث ،لعتبةتحديد قيمة ل قيثنائية عن طر ةصور إلى صورة أييمكن تحويل تحتويها.واي للون األسودا إلىويلها أصغر من قيمة العتبة يتم تحويله حصورة المراد تفي القيمة البكسل
( يبين صورة ثنائية 1-6الشكل ) .األبيضاللون إلىاكثر من قيمة العتبة يتم تحويله تهقيمبكسل للقطعة المطلوب لحامها.
الثنائي للمشغولة المراد لحامها نظامالب الصورة الملتقطة (7-6)الشكل
153
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المعالجة الرقمية للصورة: 6-5
ة من اإلجراءات البرمجية على الصور يعرف علم معالجة الصور بأنه عبارة عن مجموعة تهدف عملية المعالجة إلى تحسين الصورة الملتقطة لتسهيل الملتقطة لتحقيق أهداف محددة.
خوارزميات للتخلص تطبيق عدة خالل وذلك من تفسيرها واستخالص بعض المعلومات منها .الذي قد تتعرض له الصورة تشويشمن ال
حيث ن،القرن العشري عشرينيات أوائل إلىالبعض نشأة المعالجة الرقمية للصور حرجي وقد تم اختزال األطلنطي، عبر سلكي كبل بواسطة صور إلرسالتم ابتكار نظام يدعى بارتالن
ثالث ساعات عن طريق تشفير الصورة باستخدام خمس مستويات إلى أسبوعالفترة الزمنية من إال .15 إلىزيادة كفاءة النظام عن طريق زيادة عدد مستويات الرمادي بعد ذلك تم ،للرمادي
ن هذا حسب تعريفنا ال يعد معالجة رقمية للصورة نظرا لعدم وجود الحاسب آنذاك. وبالتالي أ أولمعالجة رقمية للصورة بدأت في سيتينيات القرن العشرين بعد ابتكار أولنستطيع القول أن
رسالحل تطور معقولة وتزامنها مع عمليات استكشاف الفضاء حاسب آلي ومروره بمرا وا .[61] لألرضمركبات الفضاء لصور فضائية
الرقمية:الصورة معالجة مراحل 6-5-1
:التالية المتتالية العمليات على أساسيبشكل عملية المعالجة الرقمية للصورة تشمل
:(image acquisition) الحصول على الصورة -1
وكمثال على البصريةمستشعرات الاكثر من أويتم الحصول على الصورة باستخدام واحد ذلك التقاط الصور بالكاميرات الرقمية.
:(pre-processing) األوليةالمعالجة -2جل الحصول على أمن قبل تطبيق خوارزمية الرؤية الحاسوبية على بيانات الصورة
أن البيانات تحقق التأكدجل أعمليات مسبقة على البيانات من إجراء البد من ،معلومات مفيدةوذلك إيضاح بعض التفاصيل المهمة في الصورة . من خالل تلك العمليات يتمافتراضات محددة
.الفلترةعمليات بتطبيق بعض التشويش من الصور إزالة بعد
154
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:(segmentation)تقطيع الصورة -3
هم أ من . تعتبرعناصر إلى أومكوناتها الجزئية إلىبتقسيم الصورة تهتم هذه المرحلةالالحقة على لعملياتن الخطأ في عملية التقسيم يعني فشل في كل االصور أل العمليات على
.لعناصر في الصورةالتعرف على امرحلة ومنها مثال الصورة
:(features extraction)استخالص المميزات -4الطريقتين: تمثيل بإحدىيها تمثيل مكونات الصورة فالتقسيم، ويتم مرحلةتلي هذه العملية
الصورة بينما يهتم طاري يهتم بالشكل الخارجي لعناصرلتمثيل اإلاتمثيل مساحي. أوطاري إ استخالص التركيز على . في هذه المرحلة يتملمساحي بالخصائص الداخلية للصورةالتمثيل ا
على بعض النماذج الرياضية باالعتماد في الصورة األهميةبعض الصفات والسمات موضع .لمعالجة الصورة واإلحصائية
:(classification)تصنيف المميزات -5
من معينة منطقة أوفي هذه المرحلة تكون البيانات المدخلة هي مجموعة من النقاط البيانات التي تم أن منالتأكد لذا يتم .المراد دراسته عنصرتحتوي ال أنها يعتقدالصورة التي
عرف تالتي تم ال لعناصرتصنيف اومن ثم توافق افتراضات التطبيق المقترح الحصول عليها عدة فئات. إلىعليها
:(image understanding)فهم الصورة -6في معينعنصر تحديد تطابق وتهدف إلى المعالجة الرقمية هي المهمة التقليدية في
في الحاسب. سبقا ممعرف مرجعي مع نموذج الصورة
:ضبط مسارات اللحام 6-6
لفترة طويلة كان اللحام عمل يمكن أن ينجزه اإلنسان فقط، كونه مهارة تجمع بين الذكاء والفن والعلم. لذا فإن أتمتة اللحام كانت عملية صعبة كونها تتطلب نظام لحام آلي يالئم
نظام حركة معين والتنسيق بين حركة مشعل االحتياجات. وبما أن معظم تقنيات اللحام تتطلبعمليات تنفيذ معظماللحام ومصدر طاقة اللحام عندها نجد أن الروبوت هو التطبيق األمثل ل

155
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تطلبه من خبرات ييعني زيادة في التعقيد بما اإلنتاجاللحام. إال أن إدخال الروبوت في عملية بحيث ال يسمح للشركات بأن تستفيد بشكل شخصية للبرمجة والصيانة، وهذا يشكل عائقا كبيرا
كامل من المرونة المخزنة داخل برامج الروبوت. بالرغم من ذلك نستطيع القول أن استخدام الروبوت إلجراء عمليات اللحام يعتبر هو الحل األمثل.
تنفيذ عملية اللحام، أما أغلبية واسعة من عندإن عامل اللحام يستعمل مقدرته اإلدراكية طبيقات الروبوت الناجحة في الماضي والحاضر تعتمد على التنفيذ المتكرر للبرامج الثابتة التي ت
تعلق بالموقع أو مسار العمل. مع تطور يبال تعديل أو باألحرى بتعديل طفيف جدا بهايعمل أنظمة الرؤية الحاسوبية وازدياد قدرة الحاسبات اآللية التي تشغل الروبوتات ازدادت قدراتالروبوت، وقد أدى إدخال أساليب الذكاء الصنعي في برمجة الروبوت إلى فتح آفاق جديدة لم
أصبح بالتالي و ،يرات في البيئة المحيطةن قبل وسهل تكيف الروبوت مع التغتكن ممكنة م نجازها باستخدام أساليب البرمجة التقليدية.إالروبوت قادرا على القيام بأعمال من الصعب
عدة عوامل وهي: دقة تنفيذ الوصلة اللحامية بواسطة الروبوت بشكل كبير علىتعتمد
بدقة. تحديد مسار اللحام -4
.المراد لحامها المسافة بين مشعل اللحام والمشغولةضبط -3
.وضع المشغولة المراد لحامهاتضبط -2
:اللحام اتتحديد مسار 6-1-6
تتبع تحديد و الهدف األساسي الذي يجب إنجازه بواسطة روبوت اللحام هو القدرة على ، حيث أن جودة اللحام تعتمد بشكل كبير على توضع الكتلة [62] منطقة الوصلة اللحامية بدقة
قد ال نحصل من البرمجة المسبقة لمسار اللحام بغض النظر عن أبعادها. كما أننا المنصهرةمسار اللحام عن المسار انحرافعلى الدقة المرجوة بسبب إمكانية انحراف المشغولة وبالتالي
يعتبر تحديد مسارات اللحام بدقة من أهم العوامل المؤثرة على جودة الوصلة لذا االسمي. .اللحامية
156
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لمصنعة لروبوتات اللحام على تحديد مسارات في البداية اعتمدت الشركات العالمية االلحام بإدخال معادلة مسار اللحام المطلوب ومن ثم يعمل الروبوت على تتبع هذا المسار. تكمن المشكلة في استخدام هذه الطريقة في صعوبة كتابة المعادالت وباألخص عند وجود مسارات
. [63]منحنية ومعقدة
ومن (CAD)فيما بعد اعتمدت الشركات على رسم المشغولة المراد لحامها بإحدى برامج ثم تحديد مسار اللحام في المشغولة وتحويل المسار إلى مجموعة من األوامر باستخدام
رسالها برنامج التحكم بالروبوت ليتحرك على المسار المطلوب. إلىخوارزميات تحويل خاصة وا بأننا بحاجة لفنيين األسلوبأسهل من سابقتها لكن تكمن صعوبة استخدام هذا هذه الطريقةتعتبر
. [64]ال بأس به ا مختصين لرسم المشغولة بدقة وقد تتطلب عملية الرسم وقت
مع تطور أساليب الذكاء الصنعي المستخدمة في الروبوتات اعتمدت الشركات على تدريب الروبوت على مسار اللحام المطلوب من قبل عامل ماهر، ومن ثم يقوم برنامج الروبوت
الدقة في توجيه الروبوت عند األسلوببتكرار المسار عند لحام القطع الالحقة. يتطلب هذا .[65] لمطلوبتدريبه على المسار ا
الحقا استعانت الشركات بماسح ليزري لرسم المشغولة بشكل كامل، وذلك بإجراء عملية مسح ثالثية البعد للسطح الخارجي للمشغولة المراد لحامها بواسطة شعاع ليزري مرفقا بعملية طتصوير للمشغولة ومن ثم تحليل هذه الصور وبناء مصفوفة ثالثية البعد لعدد كافي من نقا
تلك المشغولة، وأخيرا إكساء هذه النقاط بسطح مشترك يمثل السطح الخارجي للنموذج سطحتتطلب عملية المسح الفراغية للمشغولة زمن معالجة كبير وذلك بعد التخلص من الرقمي المولد.
عدد ال بأس به من خوارزميات معالجة باستخدامالتشويش الموجود في الصور الملتقطة . [66]الصورة
لضبط حساس للتيار ونظام مقارنة مؤلفة من تقنية الشركاتبعض تأيضا استخدم. يمكن اللحام على طول الوصلة اللحامية مشعلحمل تي تلروبوت التمركز النهاية المؤثرة ل
فوق منطقة الحصول على مركز الوصلة اللحامية عن طريق تحريك مشعل اللحام بشكل متموج
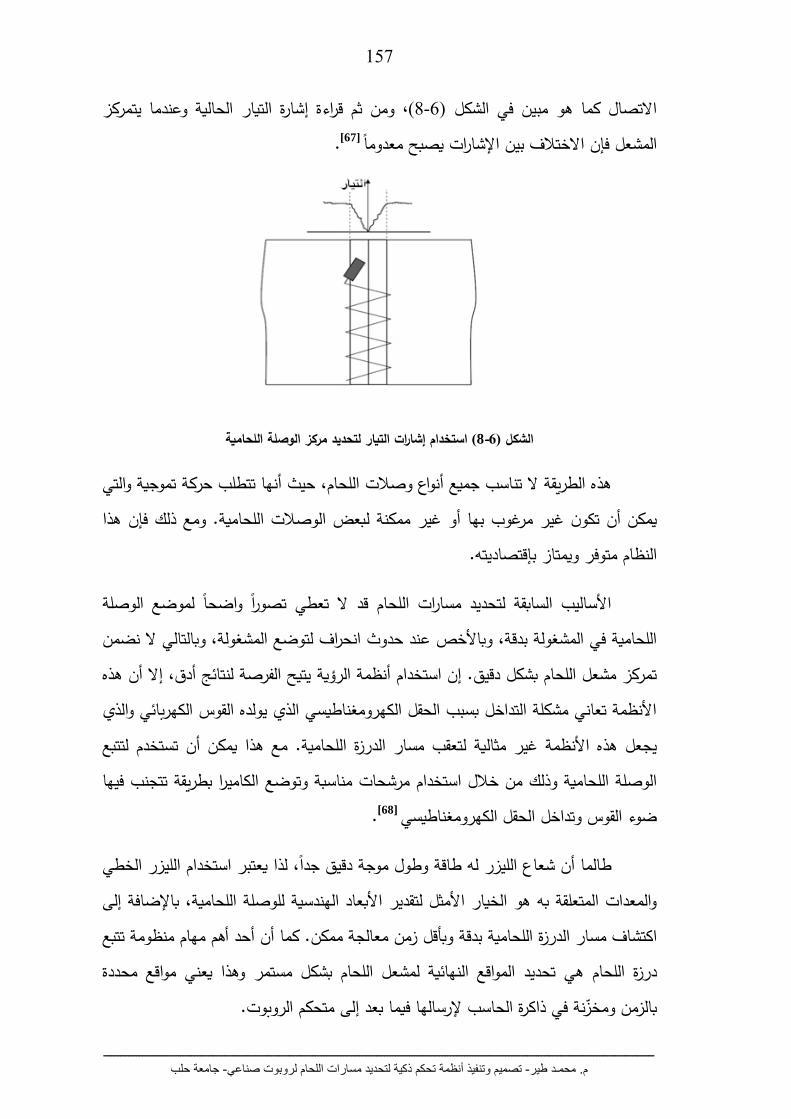
157
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الحالية وعندما يتمركز إشارة التيارقراءة من ثم و ،(8-6)الشكل في االتصال كما هو مبين . [67]المشعل فإن االختالف بين اإلشارات يصبح معدوما
استخدام إشارات التيار لتحديد مركز الوصلة اللحامية (8-6)الشكل
حيث أنها تتطلب حركة تموجية والتي ،اللحاموصالت ه الطريقة ال تناسب جميع أنواع هذبعض الوصالت اللحامية. ومع ذلك فإن هذا ليمكن أن تكون غير مرغوب بها أو غير ممكنة
.تهقتصاديإبالنظام متوفر ويمتاز
لموضع الوصلة ا واضح ا ال تعطي تصور قد األساليب السابقة لتحديد مسارات اللحام ند حدوث انحراف لتوضع المشغولة، وبالتالي ال نضمن اللحامية في المشغولة بدقة، وباألخص ع
إال أن هذه ،يتيح الفرصة لنتائج أدق ةإن استخدام أنظمة الرؤي. تمركز مشعل اللحام بشكل دقيقاألنظمة تعاني مشكلة التداخل بسبب الحقل الكهرومغناطيسي الذي يولده القوس الكهربائي والذي
تتبعتستخدم ل يمكن أن مع هذاية لتعقب مسار الدرزة اللحامية. يجعل هذه األنظمة غير مثالالكاميرا بطريقة تتجنب فيها توضعو ةمناسب مرشحاتالوصلة اللحامية وذلك من خالل استخدام . [68]ضوء القوس وتداخل الحقل الكهرومغناطيسي
لليزر الخطي أن شعاع الليزر له طاقة وطول موجة دقيق جدا ، لذا يعتبر استخدام اطالما ، باإلضافة إلى ألبعاد الهندسية للوصلة اللحاميةوالمعدات المتعلقة به هو الخيار األمثل لتقدير ا
تتبع أحد أهم مهام منظومةكما أن بدقة وبأقل زمن معالجة ممكن. اكتشاف مسار الدرزة اللحاميةمواقع محددة وهذا يعنيالمواقع النهائية لمشعل اللحام بشكل مستمر تحديد هي درزة اللحام
متحكم الروبوت. إلىما بعد في رسالهاإل الحاسب ذاكرة بالزمن ومخزنة في

158
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
قادرة على تحديد مسار اللحام للمشغولة ذكية تزويد الروبوت بمنظومة اقترحنامن هنا بحيث نضمن الحصول على دقة في ، سويا على الليزر ونظام الرؤيةباالعتماد راد لحامها الم
إلى زيادة واضحة في اإلنتاجية من باإلضافةتنفيذ اللحام وبالتالي تحسين نوعية اللحام وجودته، المشغوالت المراد لحامها. حضيرل تقليل الزمن الالزم لرسم وتخال
:المقترحة تحديد مسار اللحام متطلبات منظومة 6-6-1-1
نحن بحاجة إلى في المنظومة المقترحة الرؤية جهازباإلضافة للكاميرا الرقمية التي تمثل تعتبر تكنولوجيا الليزر من العلوم المتطورة التي تدخل في العديد من التطبيقات مثل ليزري. منبع
التطبيقات الطبية واألبحاث العلمية والهندسية والعسكرية. كلمة ليزر تعني تكبير الضوء بواسطة ام االنبعاث االستحثاثي لإلشعاع الكهرومغناطيسي. تنبأ بوجود الليزر العالم ألبرت اينشتاين في ع
م حيث وضع األساس النظري لعملية االنبعاث االستحثاثي وتم تصميم أول جهاز ليزر 1917 . [69]م1960في عام
ضوء الليزر يختلف عن الضوء العادي حيث يملك الخصائص التالية:
حادي اللون أي له طول موجي واحد، حيث يحدد الطول الموجي لون الضوء المنبعث أ - قته.الضوء الناتج وكذلك طا
الضوء المنبعث من الليزر يكون متزامن، أي أن الفوتونات كلها في نفس الطور مما يجعل -شدة الضوء كبيرة فال تالشي الفوتونات الضوئية بعضها البعض نتيجة الختالف الطور
بينها.حيث يكون شعاع الليزر عبارة عن حزمة من الفوتونات في ،الضوء المنبعث له اتجاه واحد -
كما هو مبين في مسار مستقيم بينما الضوء العادي يكون مشتت وينتشر في أنحاء الفراغ .(9-6)الشكل
الفرق بين حزمة ضوء الليزر والضوء العادي (9-6)الشكل

159
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الضوء العادي المسؤول عن هذه الخصائص هي ظاهرة االنبعاث االستحثاثي، بينما .خريكون االنبعاث تلقائي حيث يخرج كل فوتون بصورة عشوائية ال عالقة له بالفوتون اآل
.المستخدم خطييوضح مواصفات الليزر ال (3-6)الجدول
المستخدم خطيال مواصفات الليزر (6-3)الجدول
3 Output power 5 Line Output 1
Operating temperature 6 Fixed Focus 2
Operating current 7 3 Supply voltage 3
Mass 8 Wavelength 4
:المقترحة لتحديد مسار اللحام ليةاآل 6-6-1-2
مبدأ عمل المنظومة يعتمد على استخدام منبع لتوليد شعاع ليزر خطي يتم تسليطه على .(10-6)الشكل في كما هو مبين الوصلة المطلوب لحامها سطح
آلية عمل المنظومة المقترحة (10-6)الشكل
، ومن ثم يتم التقاط صورة للمسقط العلوي للمشغولة وفضاء األلوان تهيئة الكاميرايتم . (11-6)الشكل في بالكاميرا كما هو مبين
الخطي بالنسبة للمشغولةتوضع الكاميرا والليزر (11-6)الشكل
160
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
على تنفيذ عملية ا قادر ا برنامج صممناضمن الماتالب (GUI)باالستعانة بواجهات لالزمة لتحديد مسار ومن ثم إجراء العمليات ا، [70]المعالجة الرقمية للصورة الملتقطة بالكاميرا
تمييز وتحديد منحني الليزر المرتسم على المشغولة من خالل معرفة البكسالت يتم اللحام بدقة.التي تمثل هذا المنحني في الصورة، وتتميز هذه البكسالت عن غيرها بكونها تمتلك شدة عتبة لونية حمراء كبيرة، وبالتالي من خالل عملية المسح لجميع البكسالت في الصورة ومعرفة شدة
فيها نستطيع تحديد البكسالت التي تنتمي لمنحني الليزر فقط، أما باقي عتبة اللون األحمر (.A-7)كود البرنامج موضح في الملحق . البكسالت فيتم تصفير قيم جميع مركباتها اللونية
( 480*640وبقياس ) (RGB)الصورة الملتقطة بالكاميرا الرقمية تمثل بنظام األلوان
حيث تحتاج الستخدام خوارزميات عديدة المعالجة لهذه الصورة أمرا معقدا إجراءيعتبر . بكسلإلى (RGB)تحويل الصورة الملتقطة من نظام األلوان اقترحنالذا إلزالة الضجيج في الصورة،
.(12-6)الشكل في نظام صورة ذات تدرج رمادي كما هو مبين
الرماديالصورة الملتقطة بنظام التدرج (12-6)الشكل
عدة قيم برناختايتم إجراء عمليات معالجة أولية لتحويل الصورة الملتقطة لصورة ثنائية. وذلك وفقا (216)وتبين أن أفضل نتيجة تم الحصول عليها عند قيمة عتبة تساوي ،لشدة العتبة
يتحول إلى س (216)وبالتالي البكسل في الصورة الذي يملك قيمة أكبر من لإلضاءة المحيطة، اللون األسود، وبالتالي تمثل البكسالت إلىيتحول (216)والذي قيمته أقل من األبيضاللون
.(13-6)على المشغولة كما هو مبين في الشكل المسلطالبيضاء شعاع الليزر
161
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تحويل الصورة الملتقطة لنظام ثنائي (13-6)الشكل
(morphology)عمليات الـ بمجموعة من برنامجفي المرحلة التالية يقوم ال[71]
وذلك، وبالتاليتالفي المعلومات الزائدة التي تؤثر بشكل سلبي على النتائج التي يتم الحصول عليها، ل
أقل.معالجة زمنبنحصل على نتائج أفضل و
هي: المصمم المطبقة في برنامج المعالجة (morphology)أهم عمليات
Erosion هي عملية تجعل الكائن التي تطبق عليه أصغر، وذلك بحذف البكسالت منه : .(14-6)الشكل في الشوائب في الصورة كما هو مبين إزالةوبالتالي تساعد على
(Erosion)الفلترة بعد تطبيق عملية (14-6)الشكل
Dilation ليه وبالتالي إبكسالت بإضافةكبر، وذلك أ: هي عملية تجعل الكائن التي تطبق عليه .(15-6)تتم معالجته كما هو مبين بالشكل لذيالكائن ا إيضاحجل أهي عملية تستخدم من
(Dilation)الفلترة بعد تطبيق عملية (15-6)الشكل
حيث: (closingو opening)لعمليتي أساسكال هاتين العمليتين هما
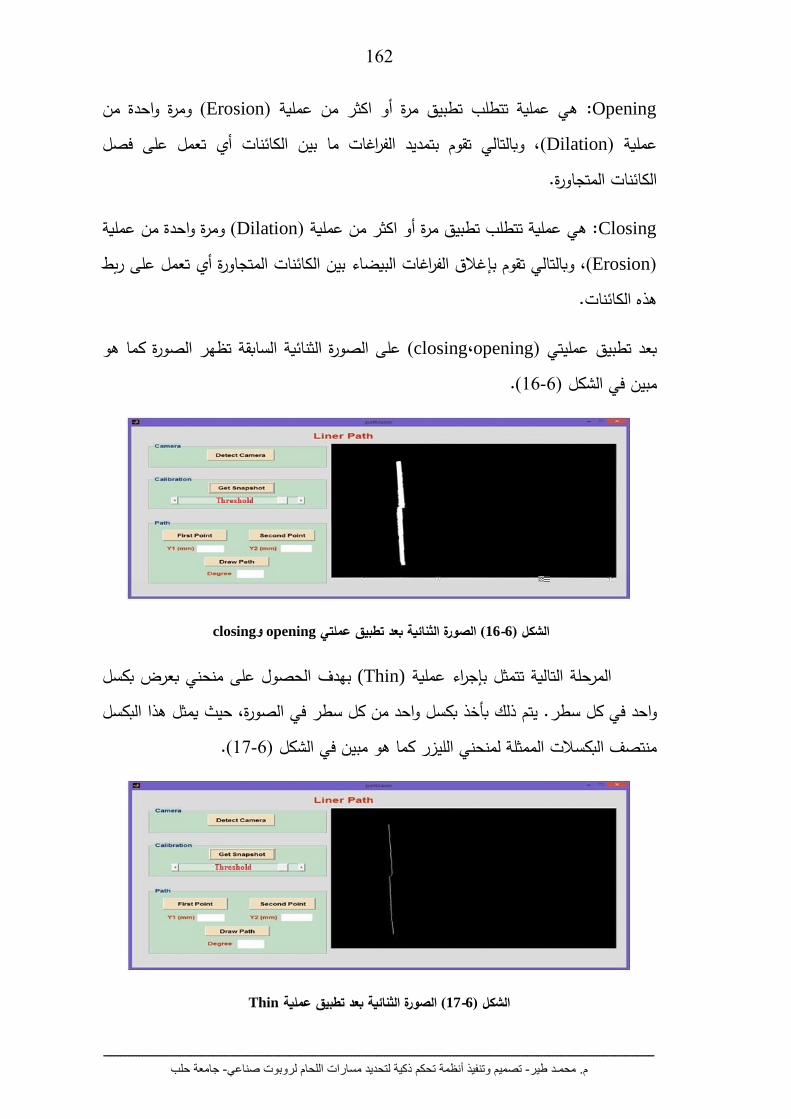
162
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
Opening: هي عملية تتطلب تطبيق مرة أو اكثر من عملية(Erosion) ومرة واحدة منتعمل على فصل أي، وبالتالي تقوم بتمديد الفراغات ما بين الكائنات (Dilation)عملية
الكائنات المتجاورة.
Closing هي عملية تتطلب تطبيق مرة أو اكثر من عملية :(Dilation) ومرة واحدة من عملية(Erosion)، تعمل على ربط أيغالق الفراغات البيضاء بين الكائنات المتجاورة إوبالتالي تقوم ب
هذه الكائنات.
تظهر الصورة كما هو على الصورة الثنائية السابقة (opening،closing)تي يبعد تطبيق عمل .(16-6)مبين في الشكل
closing و openingبعد تطبيق عملتي ثنائيةالصورة ال (16-6)الشكل
الحصول على منحني بعرض بكسل بهدف (Thin)إجراء عملية بتتمثل المرحلة التالية. يتم ذلك بأخذ بكسل واحد من كل سطر في الصورة، حيث يمثل هذا البكسل في كل سطر واحد
.(17-6)منتصف البكسالت الممثلة لمنحني الليزر كما هو مبين في الشكل
Thinبعد تطبيق عملية ثنائيةالصورة ال (17-6)الشكل
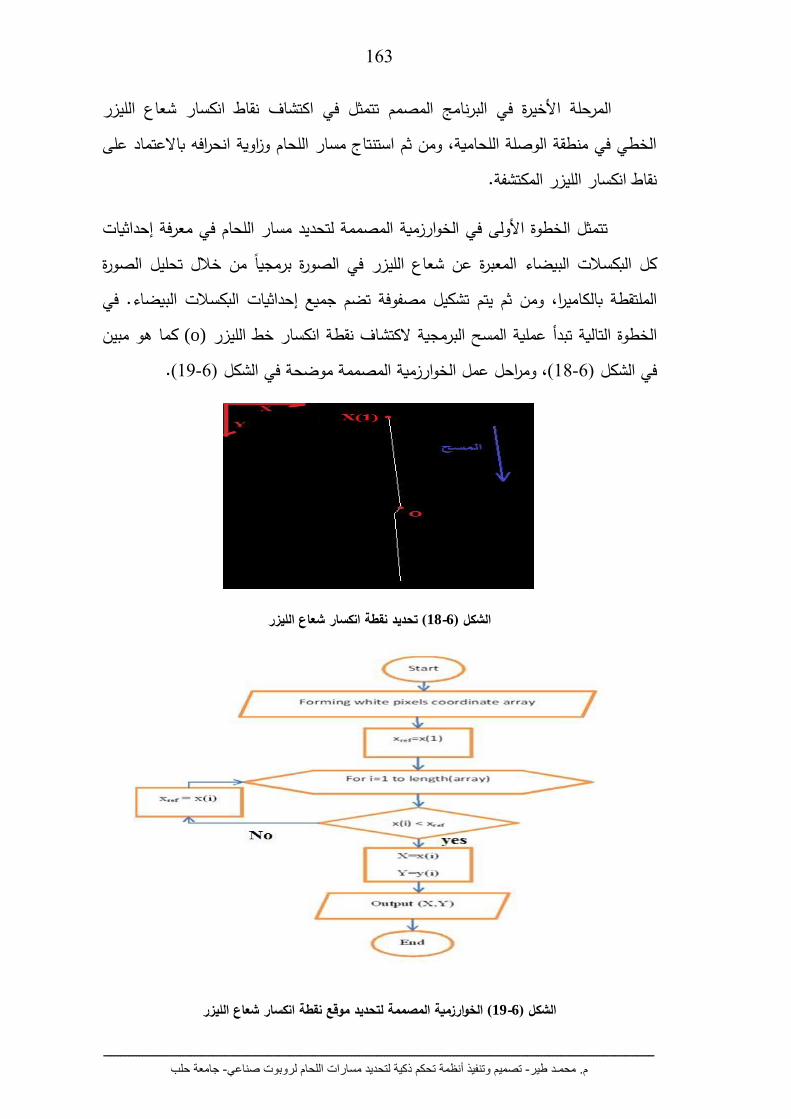
163
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تتمثل في اكتشاف نقاط انكسار شعاع الليزر البرنامج المصممالمرحلة األخيرة في باالعتماد على انحرافهالخطي في منطقة الوصلة اللحامية، ومن ثم استنتاج مسار اللحام وزاوية
.نقاط انكسار الليزر المكتشفة
إحداثيات معرفةفي تحديد مسار اللحام ل المصممة خوارزميةالفي األولى الخطوةتتمثل برمجيا من خالل تحليل الصورة كل البكسالت البيضاء المعبرة عن شعاع الليزر في الصورة
في البكسالت البيضاء. إحداثياتثم يتم تشكيل مصفوفة تضم جميع ومن ،الملتقطة بالكاميراكما هو مبين (o) نقطة انكسار خط الليزر الكتشافتبدأ عملية المسح البرمجية التالية الخطوة
.(19-6) خوارزمية المصممة موضحة في الشكلال، ومراحل عمل (18-6) في الشكل
تحديد نقطة انكسار شعاع الليزر (18-6)الشكل
نقطة انكسار شعاع الليزر موقعالخوارزمية المصممة لتحديد (19-6)الشكل
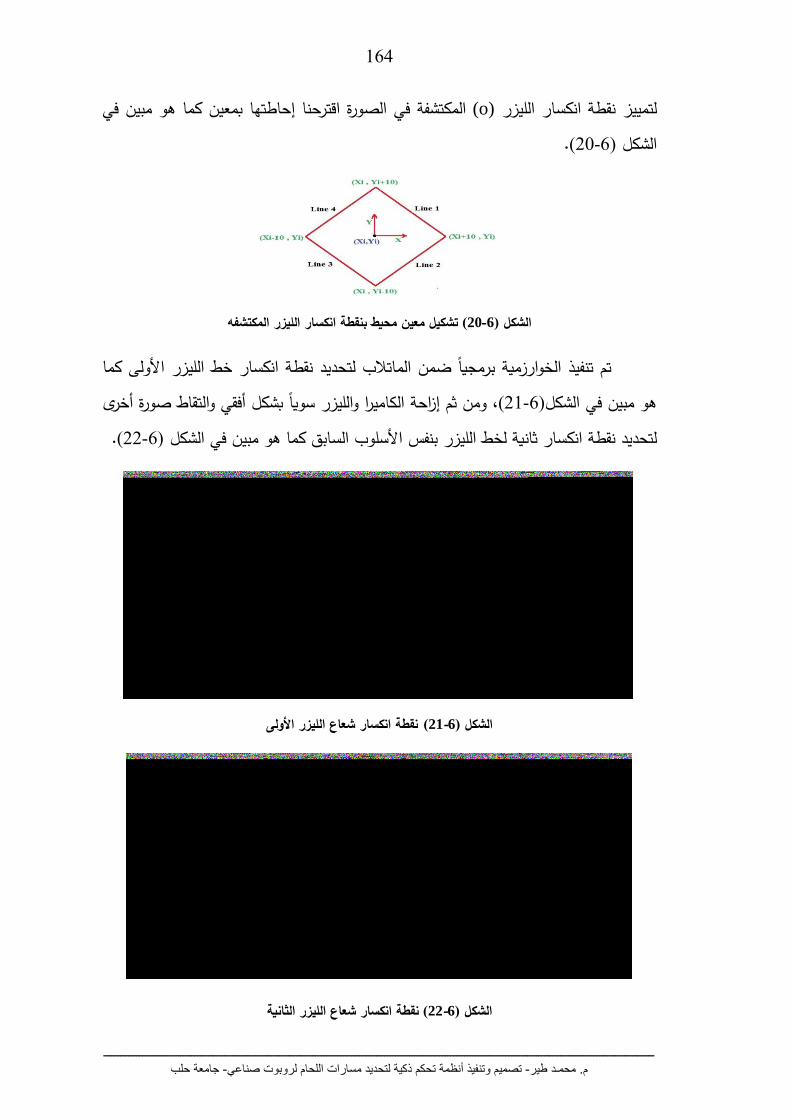
164
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
حاطتها بمعين كما هو مبين في إ اقترحنا الصورةفي المكتشفة (o)نقطة انكسار الليزر مييزلت .(20-6) الشكل
تشكيل معين محيط بنقطة انكسار الليزر المكتشفه (20-6)الشكل
كما األولىيزر تم تنفيذ الخوارزمية برمجيا ضمن الماتالب لتحديد نقطة انكسار خط اللوالتقاط صورة أخرى أفقيالكاميرا والليزر سويا بشكل إزاحة، ومن ثم (21-6)هو مبين في الشكل
.(22-6) الشكلفي السابق كما هو مبين األسلوبتحديد نقطة انكسار ثانية لخط الليزر بنفس ل
األولىنقطة انكسار شعاع الليزر (21-6)الشكل
نقطة انكسار شعاع الليزر الثانية (22-6)الشكل
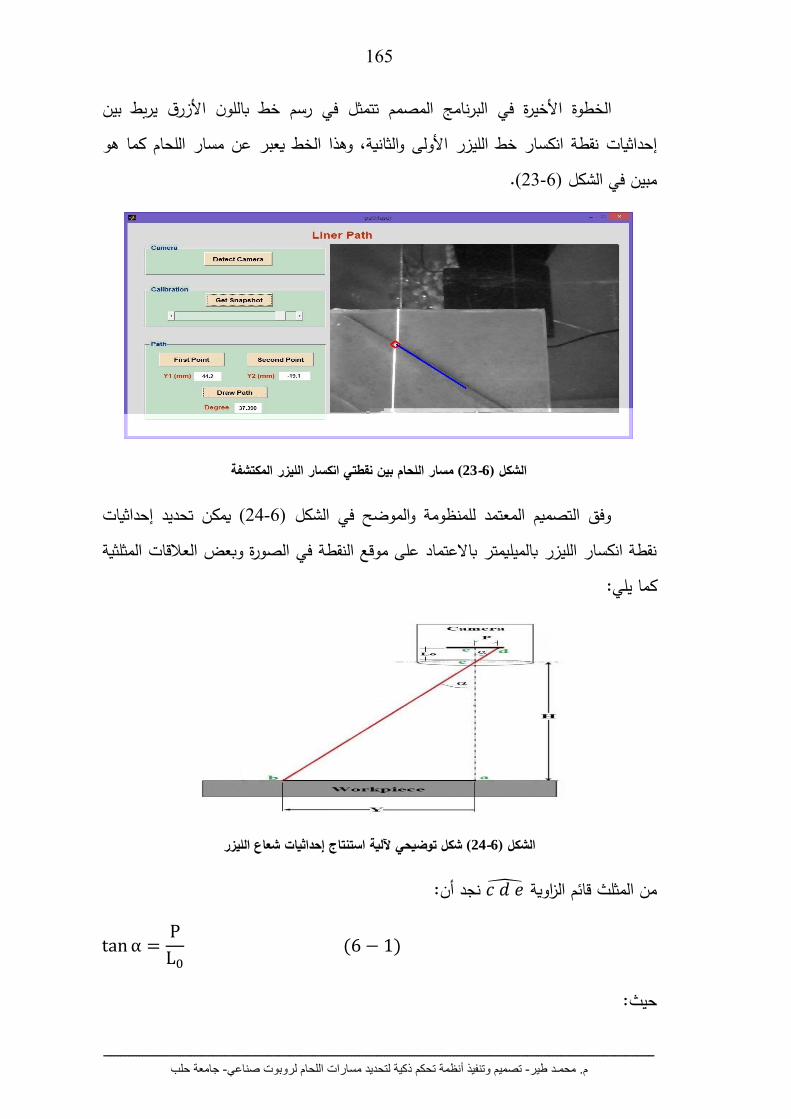
165
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
يربط بين األزرق تتمثل في رسم خط باللون المصمم األخيرة في البرنامجخطوة العن مسار اللحام كما هو والثانية، وهذا الخط يعبر األولىخط الليزر انكسارنقطة إحداثيات
. (23-6) مبين في الشكل
مسار اللحام بين نقطتي انكسار الليزر المكتشفة (23-6)الشكل
إحداثياتيمكن تحديد (24-6)وفق التصميم المعتمد للمنظومة والموضح في الشكل عض العالقات المثلثية الصورة وبفي نقطة انكسار الليزر بالميليمتر باالعتماد على موقع النقطة
كما يلي:
شعاع الليزر إحداثياتشكل توضيحي آللية استنتاج (24-6)الشكل
:نجد أن من المثلث قائم الزاوية
α
حيث:

166
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
مقاسة بالبكسل. مركز عدسة الكاميراالليزر في الصورة و انكسار : البعد بين نقطة
بين مركز عدسة الكاميرا والصورة.: البعد
تم تحديد البعد باالعتماد على عدة مسافات فعلية مقاسه يدويا من خالل المعايرة للمنظومة و (Lo) بين مركز عدسة الكاميرا ومركز الصورة حيث تبين أن:مقاسا بالبكسل
:نجد أن أيضا من المثلث قائم الزاوية
α
ومنه:
α
حيث:
الليزر مقاسا بالميليمتر. انكسار مركز عدسة الكاميرا ونقطة : البعد بين
: المسافة الشاقولية بين الكاميرا والمشغولة.
تحسب زاوية مسار اللحام كما يلي:
(
) 3
حيث:
: زاوية مسار اللحام.
األولى والثانية. اإلنكسار : المسافة األفقية بين نقطة
معايرة المنظومة: 6-6-1-3
إن إجراء المعايرة هو متطلب أساسي لعملية المسح التصويري بهدف زيادة دقة توضع الكاميرا عند التثبيت. النحرافالمنظومة. حيث تستخدم المعايرة لتصحيح الحسابات نتيجة
167
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الصورة الملتقطة واإلحداثيات المرجعية وتعبر المعايرة عن العالقة المباشرة بين إحداثيات مركز وتهدف إلى:
ضبط توضع الكاميرا. - اتخاذ عدد من القياسات المعروفة لتكون بمثابة قياسات مرجعية. - تسجيل بيانات المعايرة لتصبح قاعدة بيانات للمنظومة. -
أثناء تنفيذ المعايرة للمنظومة المقترحة ونتيجة النحراف موقع تثبيت الكاميرا عن الموقع المفترض .Y و Xحدث انحراف لمركز الصورة في االتجاهين
حيث تبين أن:
الليزر حداثيات نقاط انكسار خط إهذا االنحراف يجب أن يؤخذ بعين االعتبار عند استنتاج بهدف الحصول على دقة عالية للمنظومة.
.(25-6)الشكل في مراحل عمل البرنامج المصمم كما هي مبينة بالتالي أصبحت
تحديد مسار اللحام برنامجالمخطط الصندوقي لمراحل عمل (25-6)الشكل

168
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
االختبارات العملية والنتائج: 6-6-1-4
المسح التصويري. قد تكون أسباب األخطاء هناك العديد من مصادر الخطأ في نظم هي المكونات الميكانيكية أو البصرية المستخدمة مثل نوع الكاميرا ودقتها وأسباب أخرى مثل
.مشغولةاإلضاءة في بيئة العمل واالنعكاسات الناتجة عن سطح ال
في بعض التجارب كما هو مبين لحساب نسبة الخطأ في المنظومة المنفذة أجرينالزاوية الوصلة اللحامية في المشغولة وحساب والمقاسة، وتم تسجيل القيم الفعلية (26-6)الشكل
دراج القيم ضمن الجدول .(6-4) االنحراف وا
تحديد مسار اللحام التجارب المنفذة على منظومة (26-6)الشكل
في منظومة تحديد مسار اللحام الخطأنسبة والفعلية و المقاسةالقيم (6-4) جدولال
)درجة( المقاسةالزاوية االنحراف)درجة( %الخطأ
بمنظومة الرؤية
التجربة )درجة( الزاوية الفعلية
3 3 3 1
2
3 3
3 3 4
5
6

169
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ساوي يخطأ الزاوية نسبةومتوسط ، هإلى تقارب كبير بين القياسات الفعلية والمقاستشير النتائج .(27-6) الشكلفي كما هو مبين 1.86%
الخطأ نسبةمخطط توضيحي ل (27-6)الشكل
منحنية:اللحام المسارات تحديد 6-6-1-5
مسارات اللحام شمل تحديد يبرنامج منظومة الرؤية ل لى تطويرإتهدف تاليةالمرحلة ال . (28-6) المنحنية كما هو مبين في الشكل
مسار لحام منحني (28-6)الشكل
نحن بحاجة لتحديد عدد كبير من نقاط االنكسار على ة منحنياللحام ال اتلتحديد مسار .(29-6)كما هو مبين في الشكل طول مسار اللحام

170
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
اللحامتحديد نقاط االنكسار على طول مسار (29-6)الشكل
حركة انسحابيه لليزر آلية تؤمن باستخدام تصويرية عملية مسح إجراءبيمكن تنفيذ ذلك اط عدة صور على طول مسار اللحام كما هو مبين في مع تشغيل الكاميرا على نظام فيديو والتق
.(30-6)الشكل
عملية المسح على طول الوصلة اللحامية (30-6)الشكل
كافة نقاط االنكسار نحصل على مسار اللحام المطلوب كما هو برسم منحني يمر من بالتالي مراحل عمل برنامج تحديد مسارات اللحام المنحنية مبينة في .(31-6) مبين في الشكل
.(32-6) الشكل
مسار اللحام الواصل بين جميع نقاط االنكسار (31-6)الشكل

171
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تحديد مسارات اللحام المنحنية برنامجالمخطط الصندوقي لمراحل عمل (32-6)الشكل
دليل مسار اللحام: 6-6-1-6
هو تواجد أكثر في المشغولة مسار اللحام الصحيح تمييزالتي تحول دون أهم العقباتكما .(33-6)في الشكل ر في الصورة الملتقطة بالكاميرا الرقمية كما هو مبينمن نقطة انكسا
تبدأ عملية المسح لخوارزمية المصممة سابقا فإنل ا ، ووفق(1،2) لالنكسارجد نقطتين انالحظ تو كنقطة انكسار 1البرنامج سوف يختار النقطة لذا فإن ،لتحديد نقطة االنكسار من أعلى الصورة
ال تنتمي للمسار المطلوب الموضح باللون 1إال أن نقطة االنكسار محددة لمسار اللحام.واختيار نقطة 1، لذا نحن بحاجة لوسيلة تمكن البرنامج من تجاهل نقطة االنكسار األصفر
تمييز مسار اللحام بهدف من قبل العامل سم دليل للمساردعت الضرورة لر . من هنا 2االنكسار المطلوب.
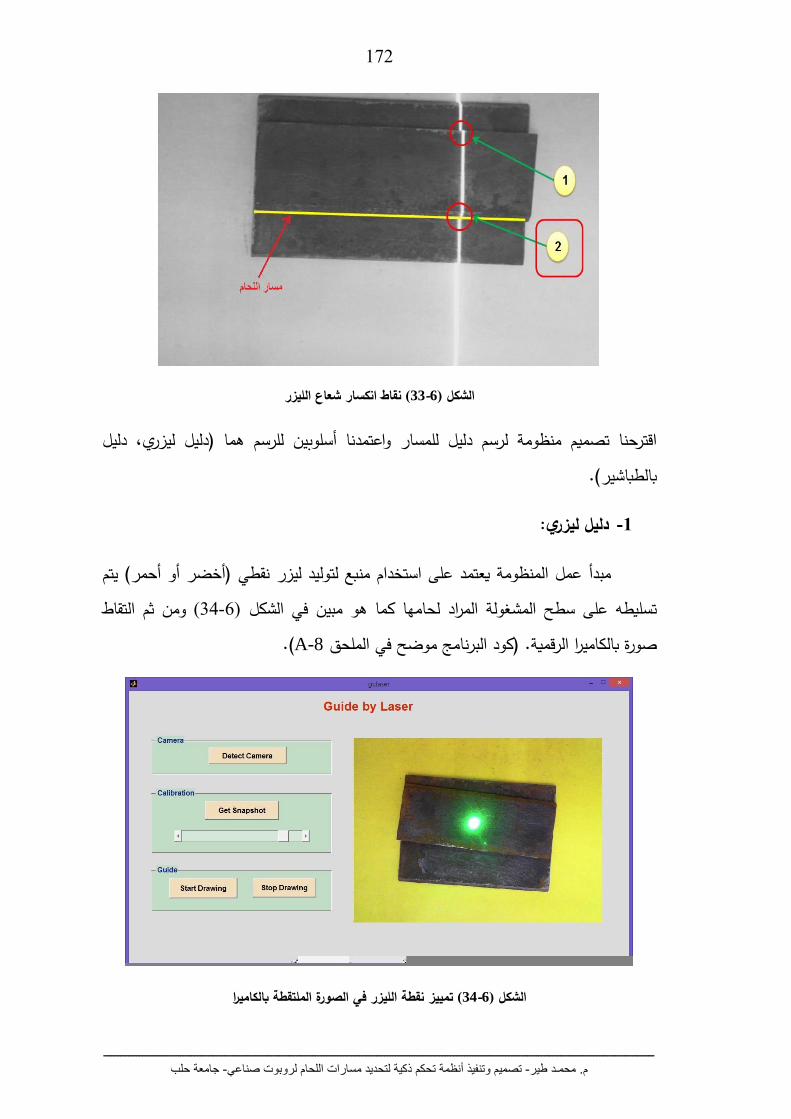
172
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
نقاط انكسار شعاع الليزر (33-6)الشكل
دليل )دليل ليزري،هما رسم لأسلوبين ل اعتمدنااقترحنا تصميم منظومة لرسم دليل للمسار و بالطباشير(.
دليل ليزري: -1
يتم )أخضر أو أحمر( نقطيمبدأ عمل المنظومة يعتمد على استخدام منبع لتوليد ليزر ومن ثم التقاط (34-6)كما هو مبين في الشكل لحامها المراد المشغولةتسليطه على سطح (.A-8)كود البرنامج موضح في الملحق .صورة بالكاميرا الرقمية
تمييز نقطة الليزر في الصورة الملتقطة بالكاميرا (34-6)الشكل
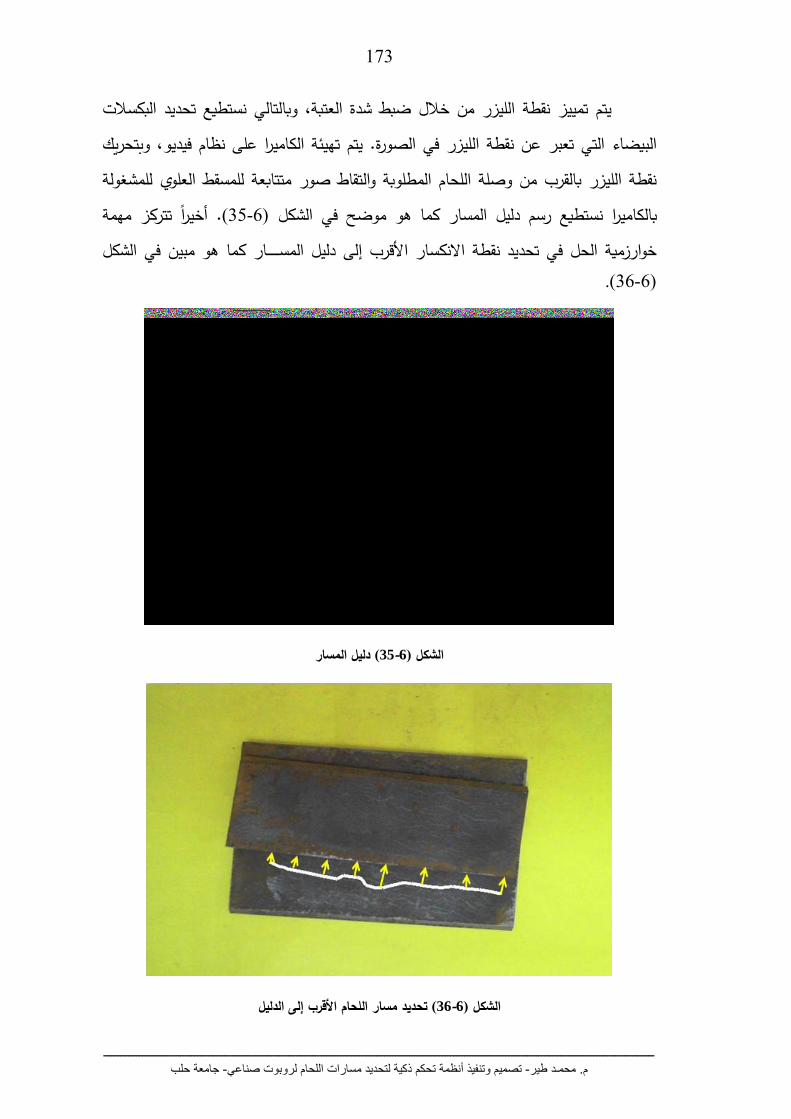
173
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تحديد البكسالت نستطيع وبالتالي ، ضبط شدة العتبةالليزر من خالل نقطةتمييز يتمبتحريك و ، على نظام فيديو تهيئة الكاميرايتم البيضاء التي تعبر عن نقطة الليزر في الصورة.للمسقط العلوي للمشغولة متتابعة التقاط صورو نقطة الليزر بالقرب من وصلة اللحام المطلوبة
تتركز مهمة . أخيرا (35-6) نستطيع رسم دليل المسار كما هو موضح في الشكل بالكاميرا كما هو مبين في الشكل ارـــــــــخوارزمية الحل في تحديد نقطة االنكسار األقرب إلى دليل المس
(6-36.)
دليل المسار (35-6)الشكل
تحديد مسار اللحام األقرب إلى الدليل (36-6)الشكل

174
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
برنامج قادر على تنفيذ عملية صممناضمن الماتالب (GUI)باالستعانة بواجهات .(37-6) ة في الشكلنومراحل عمل البرنامج مبي المعالجة الرقمية للصور الملتقطة بالكاميرا
بالليزر رسم دليل المسار برنامجالمخطط الصندوقي لمراحل عمل (37-6)الشكل
دليل الطباشير: -2
لرسم دليل منظومةعادة يستعمل العمال الطباشير في المصانع بكثرة، لذا اقترحنا تصميم بواسطة الطباشير على رسم دليلمبدأ عمل المنظومة يعتمد على . المسار بواسطة الطباشير
لـا هو مبين في الشكـكموبة ـلـام المطـــلة اللحــرب من وصــــبالق امهاـــــلح المراد المشغولةسطح ضبط شدة من خالل لون الطباشيرتمييز يتم ومن ثم التقاط صورة بالكاميرا الرقمية. ،(6-38)
كما خط المرسوم بالطباشيرالوبالتالي نستطيع تحديد البكسالت البيضاء التي تعبر عن ، العتبة ا قادر ا برنامج صممناضمن الماتالب (GUI)باالستعانة بواجهات .(39-6)هو مبين في الشكل
ومراحل عمل البرنامج مبينة في على تنفيذ عملية المعالجة الرقمية للصورة الملتقطة بالكاميرا (.A-9)كود البرنامج موضح في الملحق .(40-6)الشكل
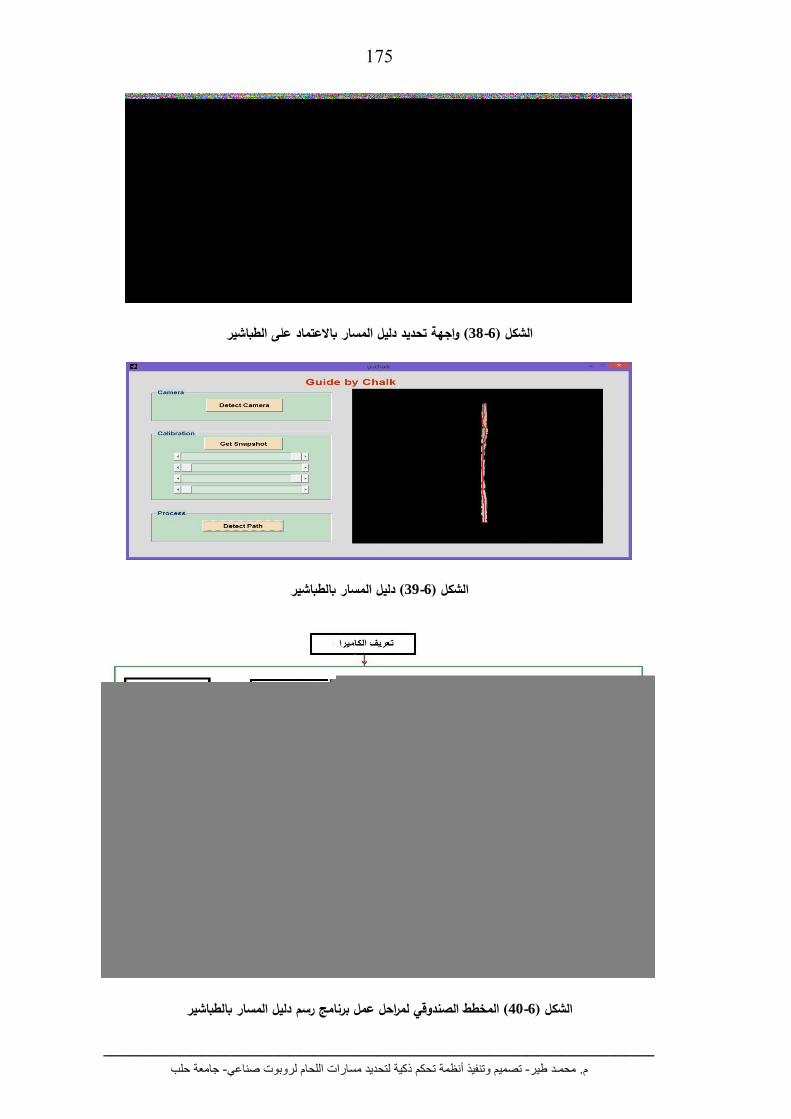
175
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
واجهة تحديد دليل المسار باالعتماد على الطباشير (38-6)الشكل
دليل المسار بالطباشير (39-6)الشكل
بالطباشير رسم دليل المسار برنامجالمخطط الصندوقي لمراحل عمل (40-6)الشكل

176
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
ضبط المسافة بين مشعل اللحام والمشغولة: 2-6-6
يعتبر ضبط المسافة بين مشعل اللحام والمشغولة من أهم العوامل المؤثرة على استقرار القوس الكهربائي، حيث أن تغير بسيط في المسافة يمكن أن ينتج عنه قوس كهربائي غير
اءت أهمية تزويد روبوت اللحام من هنا ج مستقر وبالتالي تظهر الكثير من العيوب في اللحام.توفر قاعدة من ، وبالتاليبشكل ذاتي لضبط المسافة بين مشعل اللحام والمشغولة بمنظومة
بمسافة ثابتة على طول البيانات ضمن برنامج التحكم بالروبوت لحمل مشعل اللحام وتحريكه المطلوب. مسار اللحام
. ضبط ارتفاع مشعل اللحاملاستخدام حساس الليزر ون من هذا المنطلق أقترح المصمملقياس المسافة باالستعانة بالليزر. المبدأ األول يعتمد على إصدار ةرئيسي مبادئ ةثالثهناك
نبضات من الليزر ومن ثم حساب الزمن المستغرق بين انبعاث النبضة على الجسم وانعكاسهاالزمن نستطيع تحديد المسافة بين مصدر الليزر وفقا لقيمة . (41-7)كما هو مبين في الشكل
صدر بشكل نبضة لقياس المسافات البعيدة بسبب أن الليزر ي مالئمعتبر والجسم. هذا المبدأ ي . [72]وليس كشعاع وبالتالي نضمن عدم تشتت الليزر
وانعكاسهانبعاث نبضة الليزر إل المستغرق زمنالقياس المسافة باالعتماد على (41-6)الشكل
يعتمد على استخدام منبع ليزري لتوليد شعاع يتم إسقاطه على الجسم. تحدد ثاني المبدأ الالمسافة بين الليزر والجسم من خالل حساب قطر بقعة الليزر في الصورة الملتقطة بواسطة
لقياس المسافات مالئمعتبر . هذا المبدأ ي (42-7)كما هو مبين في الشكل الكاميرا الرقمية
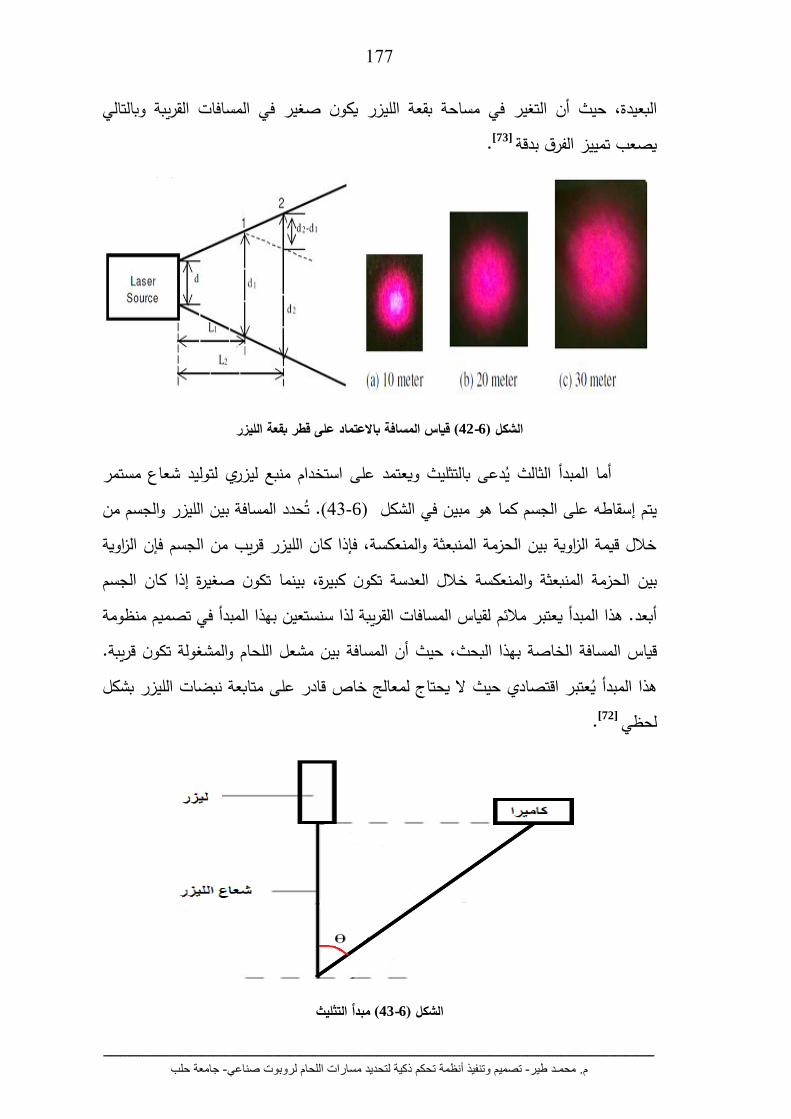
177
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بالتالي بقعة الليزر يكون صغير في المسافات القريبة و في مساحةأن التغير ، حيث البعيدة . [73]يصعب تمييز الفرق بدقة
قياس المسافة باالعتماد على قطر بقعة الليزر (42-6)الشكل
يدعى بالتثليث ويعتمد على استخدام منبع ليزري لتوليد شعاع مستمر ثالثأما المبدأ ال. تحدد المسافة بين الليزر والجسم من (43-6)كما هو مبين في الشكل يتم إسقاطه على الجسم
خالل قيمة الزاوية بين الحزمة المنبعثة والمنعكسة، فإذا كان الليزر قريب من الجسم فإن الزاوية بينما تكون صغيرة إذا كان الجسم ،المنبعثة والمنعكسة خالل العدسة تكون كبيرةبين الحزمة
لقياس المسافات القريبة لذا سنستعين بهذا المبدأ في تصميم منظومة مالئمأبعد. هذا المبدأ يعتبر حيث أن المسافة بين مشعل اللحام والمشغولة تكون قريبة. بهذا البحث،قياس المسافة الخاصة
ى متابعة نبضات الليزر بشكل عتبر اقتصادي حيث ال يحتاج لمعالج خاص قادر عللمبدأ ي هذا ا . [72]لحظي
التثليث مبدأ (43-6)الشكل

178
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
المقترحة:القياس منظومة تصميم 6-6-2-1
والتي تعتمد في ذات الكلفة المنخفضة معظم الباحثين والمصممين ألجهزة قياس المسافةاتجاه شعاع الليزر موازيا لمحور فيه يكون تصميم موحد اعتمدوا تصميمها على مبدأ التثليث
هذا التصميم يسمح بإجراء القياسات ضمن .(A-44-6) عدسة الكاميرا كما هو مبين في الشكلكما هو موضح بالخطوط الصفراء في الشكل حتى الالنهاية ( من ) ابتداء مجال مفتوح
(A-44-6) من ، إال أن عيوب هذا التصميم تتمثل بعدم إمكانية قراءة المسافات القريبة جدا .الكاميرا في هذا التصميم ال يتيح لها رؤية نقطة الليزر ألن توضع، ( قل من )أ الليزر
تالشيبسبب لمسافات البعيدة قياس اعند باإلضافة إلى أن دقة الجهاز تتالشى بشكل كبير لمنظومة وفقا بهذه اقياس الأثبتت أن دقة تائج الباحثين ن .شعاع الليزر أو بسبب دقة الكاميرا
(%0.64)الخطأ ال تقل عن نسبةمليمتر و 1للتصميم المعتمد ال تقل عن [74] .
وبالتالي من المفترض أن ،إن روبوت اللحام يعمل ضمن حيز عمل معينكما نعلم فتصميم اقترحنالذا يكون جهاز قياس المسافة مصمم ليعمل ضمن مجال محدد فقط بدقة عالية.
بين المشعل من مجال محدد كافي لضبط المسافةدقة ضأكبر يمكننا من الحصول على وبكلفة منخفضة يكسب الروبوت يملك دقة عاليةوالمشغولة، وبالتالي نحصل على حساس ليزري
درجة من الذكاء يستطيع من خالله برنامج التحكم بالروبوت ضبط حركة مشعل اللحام على جراء التعديالت المطلوبة بشكل ذاتي في حال حدوث أي انحراف طول الوصلة اللحامية وا
. مشغولة المراد لحامهالموضع ال
مالة زاوية محور الكاميرا ة الكاميرا والليزربين مركز عدسبالحفاظ على البعد الشاقولي وا :تبين أن .(B-44-6)الشكل في ( كما هو مبين بالنسبة لشعاع الليزر بزاوية )
ع التصميم التقليدي يلم يستط قادر على قراءة مسافات قريبة من الليزر (B)التصميم المقترح -4 .( > )أن (44-6)قراءتها حيث كما نالحظ في الشكل
تم االستفادة من نصف (S)نالحظ أنه ضمن مجال محدد للقياس (B)في التصميم المقترح -3ذا ما تمت (P2)عرض الصورة عند تحليل الصورة برمجيا لحساب المسافة ضمن هذا المجال وا

179
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
م وبالتالي دقة القياس للتصمي (P1<P2)المقارنة لنفس المجال في التصميم التقليدي نالحظ أن ستكون أكبر بكثير من دقة القياس في التصميم التقليدي. (S)المقترح ضمن المجال
توضع الكاميرا بالنسبة لليزر في التصميم المقترح والتقليدي (44-6)الشكل
وفقا لمتطلبات االستخدام، لذا يجب أن نأخذ بعين االعتبار المصممة يتم تحديد أبعاد المنظومة ما يلي:
الجهاز.مكان توضع -4 (. مسافة قياس مطلوبة )أبعد و تحديد أقرب -3ويمكن التحكم بعرض المجال من خالل ضبط المطلوب، تحديد مجال قياس المسافة -2
قل ونحصل على دقة أفضل أحيث كلما قل االرتفاع أصبح عرض المجال (H) االرتفاع ضمن هذا المجال فقط.
بالنسبة لليزر لتحقيق األهداف السابقة كما يلي:يمكن حساب زاوية ميل محور الكاميرا
نجد أن: من المثلث قائم الزاوية
β γ
180
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:كما يلي βحيث تحسب
β
من العالقة: γوتحسب
γ
.( و في هذا التصميم يقع بين ) الذي يملك أكبر دقة (S)مجال القياس
كما يلي: ( حيث تحسب )
ومنه:
:المقترحة القياس عمل منظومة آلية 6-6-2-2
بعد .ثم تهيئة الكاميرا وفضاء األلوانيتم بالبداية تهيئة توضع الليزر بالنسبة للكاميرا يتم التقاط صورة بالكاميرا الرقمية. المرحلة التالية تتمثل مشغولةعلى ال تسليط شعاع الليزر
ا حاسوبي ا برنامج صممناضمن الماتالب (GUI)باالستعانة بواجهات ، حيث بمعالجة الصورةومن ثم إجراء العمليات ،على تنفيذ عملية المعالجة للصورة الملتقطة بالكاميرا الرقميةا قادر
)كود البرنامج .الليزر على الصورة ومن ثم حساب المسافة بقعةالحسابية الالزمة لتحليل موقع (. A-10موضح في الملحق
جراء المعالجة إعتبر ي . (RGB)األلوان نمط بالكاميرا الرقمية تمثل بالصورة الملتقطة إلى صورة (RGB)لهذه الصورة أمرا معقدا لذا يتم تحويل الصورة الملتقطة من نظام األلوان
عدة قيم لشدة العتبة تبين أن ختيارا. بعد (45-6)الشكل في ذات تدرج رمادي كما هو مبين وفقا لإلضاءة المحيطة، (216) تم الحصول عليها عند قيمة شدة عتبة تساوي نتيجةأفضل
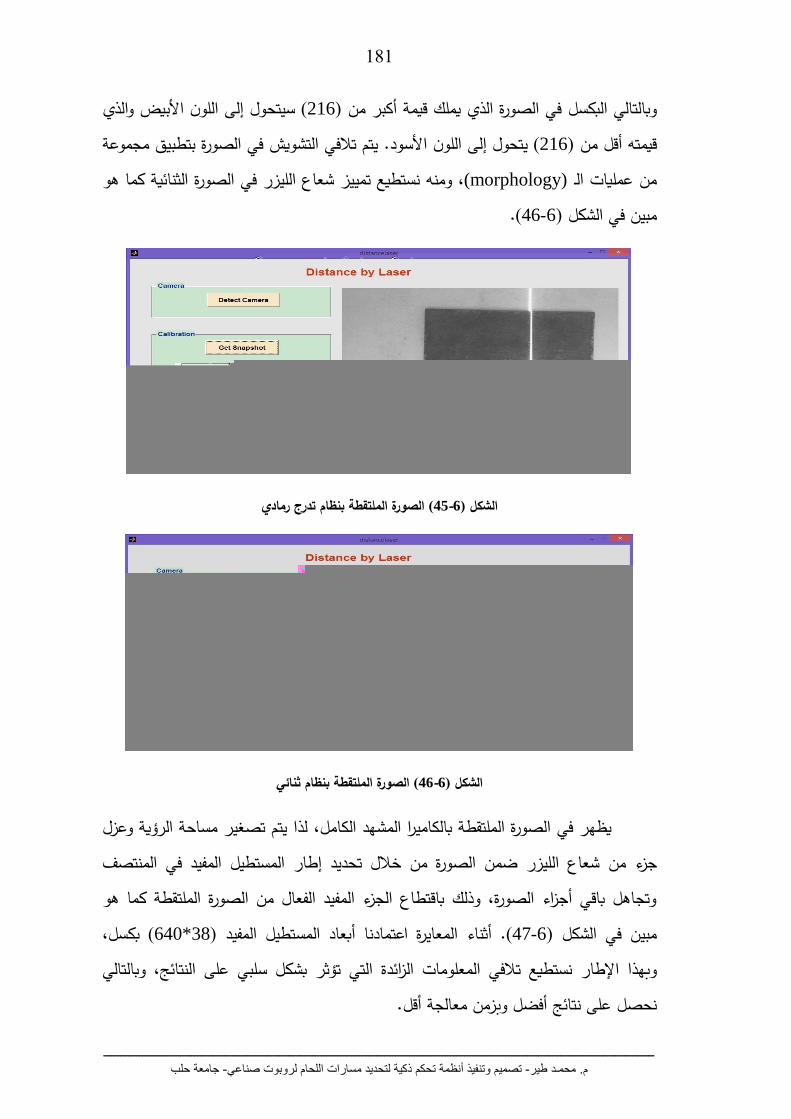
181
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
والذي األبيضيتحول إلى اللون س (216)في الصورة الذي يملك قيمة أكبر من بكسلوبالتالي الفي الصورة بتطبيق مجموعة التشويشيتم تالفي اللون األسود. إلىيتحول (216)قيمته أقل من ثنائية كما هو الصورة ز شعاع الليزر في اليمينستطيع ت، ومنه (morphology)من عمليات الـ
.(46-6)الشكل في مبين
الصورة الملتقطة بنظام تدرج رمادي (45-6)الشكل
الصورة الملتقطة بنظام ثنائي (46-6)الشكل
لذا يتم تصغير مساحة الرؤية وعزل ،الصورة الملتقطة بالكاميرا المشهد الكاملفي يظهر في المنتصف شعاع الليزر ضمن الصورة من خالل تحديد إطار المستطيل المفيد جزء من
كما هو وتجاهل باقي أجزاء الصورة، وذلك باقتطاع الجزء المفيد الفعال من الصورة الملتقطة ،بكسل (38*640)أبعاد المستطيل المفيد نا. أثناء المعايرة اعتماد(47-6)مبين في الشكل
، وبالتالي التي تؤثر بشكل سلبي على النتائجبهذا اإلطار نستطيع تالفي المعلومات الزائدة و نحصل على نتائج أفضل وبزمن معالجة أقل.
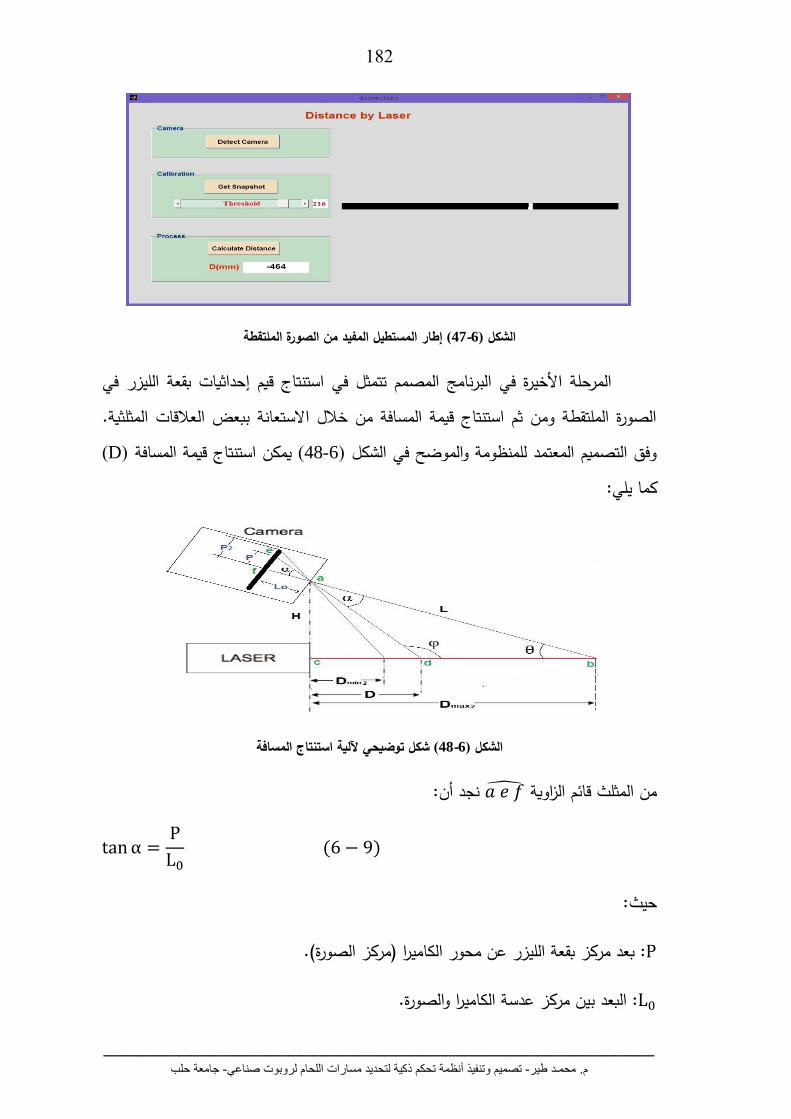
182
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
إطار المستطيل المفيد من الصورة الملتقطة (47-6)الشكل
فيالليزر بقعةاستنتاج قيم إحداثيات البرنامج المصمم تتمثل في المرحلة األخيرة في .الصورة الملتقطة ومن ثم استنتاج قيمة المسافة من خالل االستعانة ببعض العالقات المثلثية
(D)يمكن استنتاج قيمة المسافة (48-6)وفق التصميم المعتمد للمنظومة والموضح في الشكل كما يلي:
شكل توضيحي آللية استنتاج المسافة (48-6)الشكل
:نجد أن من المثلث قائم الزاوية
α
حيث:
الليزر عن محور الكاميرا )مركز الصورة(. بقعة: بعد مركز
بين مركز عدسة الكاميرا والصورة.: البعد

183
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
يتم برمجيا من خالل تحليل في الصورة الليزر بقعةاستنتاج قيمة إحداثيات إن كما هو البيضاءالليزر كمجموعة من البكسالت بقعةحيث تظهر ،الصورة الملتقطة بالكاميرا
.(49-6)الشكل في مبين
الصور الملتقطةالجزء المقتطع من الليزر في قعةب (49-6)الشكل
قد يحدث انحراف بسيط لموقع تثبيت الكاميرا عن الموقع الفعلي عند تنفيذ المنظومة الليزر عن مركز الصورة بدقة يجب حساب بعد النقطة بقعةالمفترض لذا لتحديد بعد مركز ثقل
:كما يلي Yو Xباالتجاهين
∑
∑
حيث:
.Xبيض عن مركز الصورة في االتجاه : بعد البكسل األ
.Yبيض عن مركز الصورة في االتجاه بعد البكسل األ :
: عدد البكسالت البيضاء.
الليزر عن مركز الصورة كما يلي: بقعةوبالتالي يحسب بعد مركز ثقل
√
نجد أن : من المثلث لتحديد قيمة المسافة
α

184
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وأيضا :
α
ومنه:
( α
)
.المصمم يوضح مراحل عمل البرنامج (50-6)الشكل
برنامج حساب المسافةخطط الصندوقي لمراحل عمل الم (50-6)الشكل
األبعاد التالية للتصميم: اعتمدناالمنظومة المنفذة في
باقي األبعاد تحسب كما يلي:
3
أيضا :
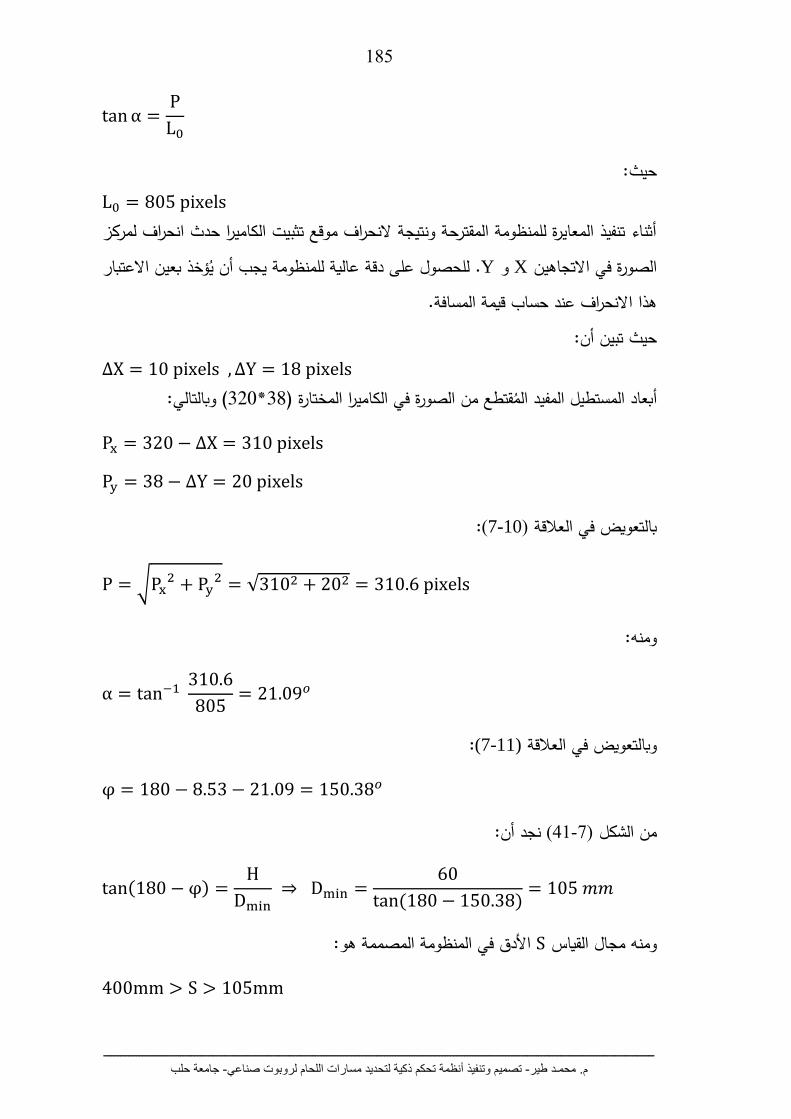
185
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
α
حيث: أثناء تنفيذ المعايرة للمنظومة المقترحة ونتيجة النحراف موقع تثبيت الكاميرا حدث انحراف لمركز
يجب أن يؤخذ بعين االعتبار للحصول على دقة عالية للمنظومة .Y و Xالصورة في االتجاهين .هذا االنحراف عند حساب قيمة المسافة
حيث تبين أن:
وبالتالي: )233*38الصورة في الكاميرا المختارة )المستطيل المفيد المقتطع من أبعاد
3 3 3
:(10-7)بالتعويض في العالقة
√
√3 3
منه:و
α 3
:(11-7) ةالعالق وبالتعويض في
3 3
نجد أن: (41-7)من الشكل
3
األدق في المنظومة المصممة هو: مجال القياس ومنه

186
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
االختبارات العملية والنتائج: 6-6-2-3
وتم ست تجارب قياس ضمن المجال أجرينا في المنظومة المنفذة الخطأ نسبةلحساب دراج القيم ضمن الجدول رافللمسافة وحساب االنح والمقاسةتسجيل القيم الفعلية .(6-5) وا
في منظومة قياس المسافة الخطأ نسبةوالفعلية و المقاسةالقيم (6-5) جدولال
(mm) المقاسةالمسافة (mm)االنحراف % (eH) الخطأ
بمنظومة الرؤية
التجربة (mm) المسافة الفعلية
3 1
3 2
3 3 3 3
4
33 33 5
6
(51-6) الشكلفي كما هو مبين هالفعلية والمقاستشير النتائج إلى تقارب كبير بين القياسات .%0.56تساوي الخطأ ضمن المجال نسبةومتوسط
مخطط توضيحي لقيمة الخطأ (51-6)الشكل
:المراد لحامها ضبط توضع المشغولة 63--6
لروبوت من أهم العوامل المؤثرة على ا أمام المراد لحامها يعتبر ضبط موضع المشغولةجودة الوصلة اللحامية، إذ أن تغير بسيط في توضع المشغولة يمكن أن ينتج عنه انحراف في
187
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
هذا ما للروبوت وبالتالي تظهر الكثير من العيوب في الوصلة اللحامية. المؤثر النهائيمسار وبالتالي تزويد نظام ،قع االسميلكشف انحراف المشغولة عن المو رؤيةتصميم منظومة إلى ادع
يتالءمبما المؤثر النهائي لتصحيح مسار ضروريةالتحكم الخاص بروبوت اللحام بالمعلومات ال مع الموضع الفعلي للمشغولة.
تمييز القطع ذات األشكال المختلفة، اعتمد معظم الباحثين ومصممي أنظمة بهدف لصورة ة لمسح منتظمإجراء عملية ب القطعة. حيث تكتشف الحواف استخالص حوافالرؤية على
الصورةمن القمة العليا اليسرى في عملية المسح تكون بدايةالملتقطة بواسطة الكاميرا. عادة تتحكم بتغييرات من قبل المستخدم سـبقا م اليمين. إن حدود العتبة المحددة إلى سفلاألوحتى
عندما يتعرف الحاسب على . ةإلى الخلفي لقطعةمن ا أو قطعةإلى ال خلفية الصورةاالنتقال من يقوم بمراجعة النقاط المجاورة لها، وعندما يكتمل إطار المنظر تماما يقوم الحاسب الحافةنقاط
برسم حافة القطعة المارة من جميع النقاط. تحتاج عملية الكشف عن حواف القطعة لزمن معالجة عدد ال بأس به من باستخداممن التشويش الموجود في الصورة وذلك بعد التخلص طويل
خوارزميات معالجة الصورة.
تتمثل في إيجاد مدى انحراف موضع اية من المنظومة المقترحة في هذا البحث إن الغبغض النظر عن شكل المشغولة. المشغولة عن موضع مشغولة مرجعية مشابهة لها تماما
لتحديد حواف المشغولة ويكفي التعرف على بعض خواص الشكلبالتالي ليس هناك حاجة عندما ، و اومقدار انزياحه المشغولة للكشف عن زاوية انحرافبأنظمة المعالجة الرقمية باالستعانة
مع ةصور التصبح الصورة مخزنة في ذاكرة الحاسب يمكنه بدء تحليل هذه المعطيات ومقارنة .تقلصت بشكل كبير جدا قد كلفة المعالجة كون ت بذلكه مسبقا ، و نماذج مخزنة في
المقترحة:ضبط توضع المشغولة آلية عمل منظومة 6-6-3-1
، سمياإلعن الموقع مشغولةلا انحرافمدى تحديدفي المنظومة المقترحة نستطيع على تعديل الروبوت قادر ، سيكون بأي اتجاهو المشغولة توضعموقع بغض النظر عن وبالتالي للمشغولة.مع التوضع الجديد يتالءمبما المؤثر النهائيمسار
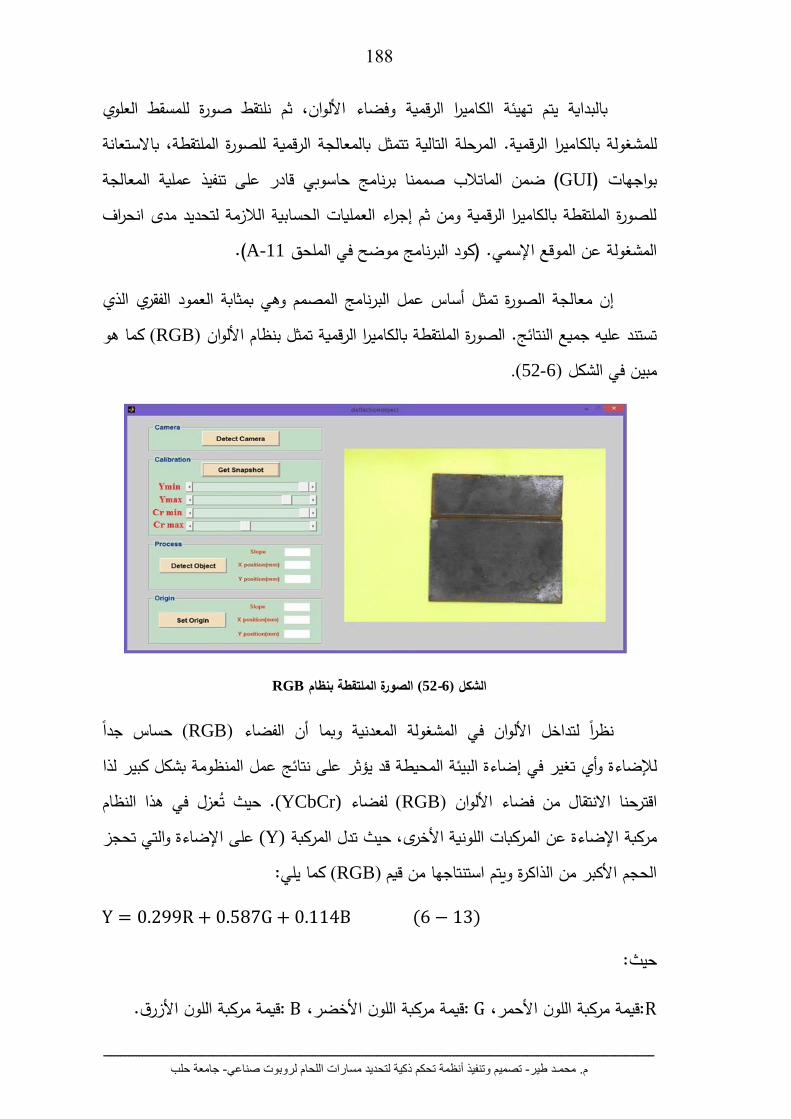
188
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
للمسقط العلوي صورة نلتقط، ثم وفضاء األلوانالرقمية لكاميرااتهيئة بالبداية يتم باالستعانة للصورة الملتقطة، الرقمية معالجةالالمرحلة التالية تتمثل ب .الرقمية الكاميراللمشغولة بعملية المعالجة قادر على تنفيذبرنامج حاسوبي صممناالماتالب ( ضمن GUIبواجهات )
انحرافللصورة الملتقطة بالكاميرا الرقمية ومن ثم إجراء العمليات الحسابية الالزمة لتحديد مدى (.A-11)كود البرنامج موضح في الملحق .اإلسميالمشغولة عن الموقع
العمود الفقري الذي بمثابة وهينامج المصمم إن معالجة الصورة تمثل أساس عمل البر كما هو (RGB)الصورة الملتقطة بالكاميرا الرقمية تمثل بنظام األلوان .تستند عليه جميع النتائج
.(52-6)الشكل في مبين
RGBبنظام الصورة الملتقطة (52-6)الشكل
حساس جدا (RGB) الفضاءنظرا لتداخل األلوان في المشغولة المعدنية وبما أن ا بشكل كبير لذ لمنظومةإضاءة البيئة المحيطة قد يؤثر على نتائج عمل اغير في لإلضاءة وأي ت
حيث تعزل في هذا النظام .(YCbCr)لفضاء (RGB) األلوان من فضاء االنتقال اقترحناوالتي تحجز اإلضاءةعلى (Y)مركبة اإلضاءة عن المركبات اللونية األخرى، حيث تدل المركبة
كما يلي: (RGB) الحجم األكبر من الذاكرة ويتم استنتاجها من قيم
3
حيث:
:قيمة مركبة اللون األزرق. :قيمة مركبة اللون األخضر، :قيمة مركبة اللون األحمر،

189
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
وغالبا ما تحجز حجم أقل في األلوانفهي تدل على فرق (Cb)و (Cr)أما المركبتين األلوانمن قيم المركبة الحمراء والزرقاء في نظام (Y) اإلضاءةالذاكرة ويتم حسابها بطرح قيمة
(RGB) :كما في المعادالت التالية
من خالل مركبات هذا النظام تجعل منه نظاما هاما في مجال اكتشاف لون المشغولة المعدنية. نتمكن من (255و 0) التي تتاوح بين (Cb,Cr,Y)المركبات تعريف مجال قيم كل من
المشغولة المعدنية المراد لحامها. حيث يتم تمييز استخالص المناطق التي تقع في تدرجات لون يتم ذلك من خالل تحديد قيمة صغرى وعظمى كحدود و ، ويل الصورة للنظام الثنائيالمشغولة بتح
تم اختيار قيمة المحي ة التجارب ووفقا لإلضاءة. بناء على (Cb,Cr,Y) للعتبة للمركباتولم (255و 107)تتراوح بين (Cr)وقيمة المركبة (255و 229)بحيث تتراوح بين (Y)المركبة
ضمن بالتالي البكسل في الصورة الذي يملك قيمة ،( على الصورةCb) غيير قيمة المركبةت يؤثر قيمة خارج تلك المجاالتاللون األبيض والذي يملك إلىمجاالت العتبة المحددة سابقا يتحول
البكسالت البيضاء مناطق تدرجات لون المشغولة يتحول إلى اللون األسود، حيث تمثل ستظهر الصورة الثنائية كما هو مبين في ( opening،closing) العمليتانتطبيق . بعدالمعدنية . (53-6) الشكل
closing و openingالصورة الثنائية بعد تطبيق عملتي (53-6)الشكل
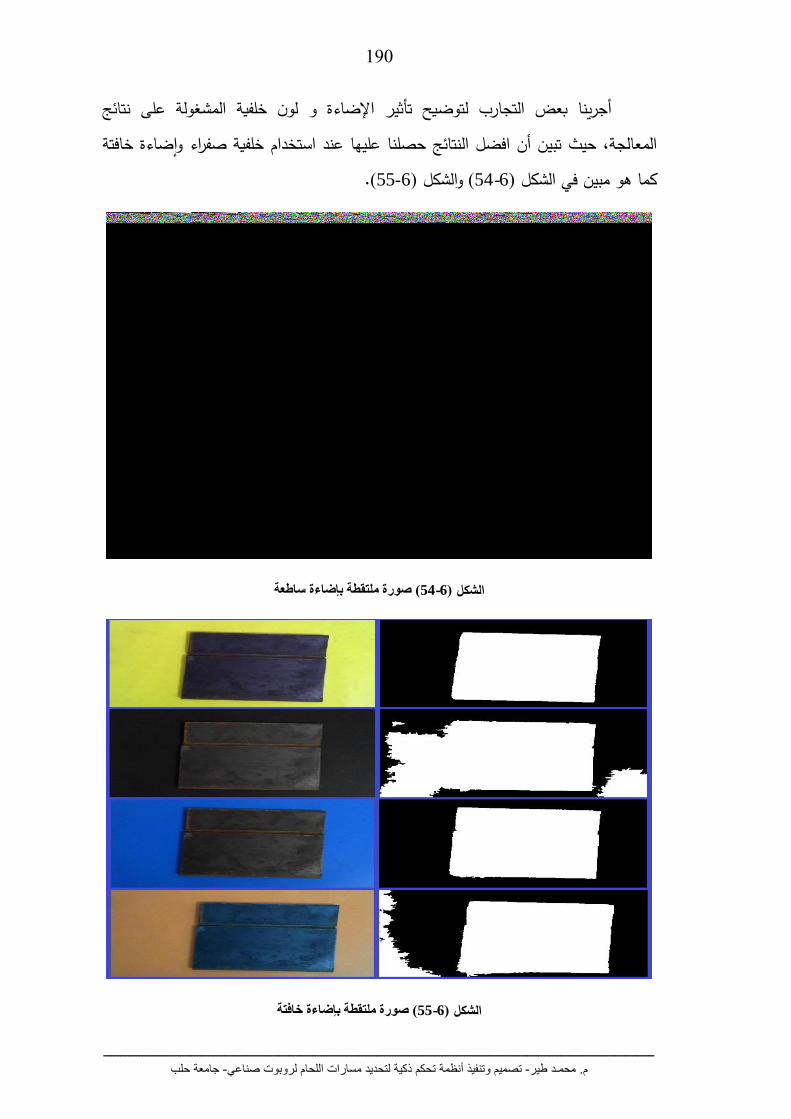
190
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تأثير اإلضاءة و لون خلفية المشغولة على نتائج توضيحتجارب لال بعضأجرينا ضاءة خافتة المعالجة، حيث تبين أن افضل النتائج حصلنا عليها عند استخدام خلفية صفراء وا
.(55-6)والشكل (54-6)كما هو مبين في الشكل
صورة ملتقطة بإضاءة ساطعة (54-6)الشكل
صورة ملتقطة بإضاءة خافتة (55-6)الشكل

191
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تتمثل في اسـتنتاج إحـداثيات مركـز المشـغولة وزاويـة في البرنامج المصمم المرحلة األخيرة تشـــكيل القطـــع اقترحنـــا .قا فـــي الحاســـببســـممخـــزن مرجعـــي ذج و مـــانحرافهـــا وانزياحهـــا بالنســـبة لن
الناقص المحتوى ضمن مساحة البكسالت البيضاء التي تعبـر عـن المشـغولة فـي الصـورة كمـا هـو .(56-6)شكل مبين في ال
تشكيل القطع الناقص المحتوى ضمن حيز المشغولة (56-6)الشكل
البقع البيضاء عدد حددنا باالستعانة ببعض التعليمات المتوفرة في مكتبات برنامج الماتالب :التابع التالي باستخدام (bw) في الصورةالموجودة
[labeled,num] = bwlabel(bw,num)
حيث:
:labeled .هي مصفوفة توضح موقع توضع البقع البيضاء في الصورة
num: .عدد البقع البيضاء الموجودة في الصورة
الصورة المعالجة تحتوي على بقعة بيضاء واحدة وهي التي تعبر عن المشغولة. يتم البقعة ثقلمركز ، حيث يحدد (regionprops)تحديد خصائص البقعة باالستعانة بالتعليمة
بالتابع: ستعانةباال
stats=regionprops(bw, ‘Centroid’)
للقطع الناقص المحتوى ضمن مساحة ( واألصغر ) ( ويتم تحديد القطر األكبر ) البقعة البيضاء باالعتماد على التوابع التالية:

192
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
stats=regionprops(bw, 'MajorAxisLength')
stats=regionprops(bw, 'MinorAxisLength')
والقطر األكبر للقطع الناقص (x) لمحورأي الزاوية بين ا ( ) اتجاه المشغولةثم يتم تحديد باالعتماد على التابع:
stats = regionprops(bw, 'Orientation')
له، اقترحنا إحاطة القطع واألصغر األكبرمركز القطع الناقص والقطر إحداثياتبعد تحديد يغطي كامل مساحة المشغولة. مستطيلالناقص ب
زوايا المستطيل باالعتماد على أبعاد القطع الناقص وبعض العالقات المثلثية إحداثيات استنتجنا .(57-6)كما هو مبين في الشكل
زوايا المستطيل المحيط بالمشغولة إحداثياتاستنتاج (57-6)الشكل
كما يلي: النقطة إحداثياتتحسب
حيث :
.لقطع الناقصل األكبر قطر: ال
: زاوية ميل القطع الناقص.

193
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
. في االتجاه بعد مركز القطع الناقص عن مركز الصورة :
. في االتجاه بعد مركز القطع الناقص عن مركز الصورة :
كما باالعتماد على احداثيات النقطة زاوية المستطيل إحداثياتوبالتالي يمكن حساب يلي:
(
)
(
)
حيث:
صغر.قطر القطع الناقص األ:
نجد أن: النقطة إحداثياتباالعتماد على أيضا
(
)
(
)
كما يلي: ، ، النقاط إحداثياتوبنفس الطريقة يمكن حساب
(
)
(
)
(
)
(
)
تشكيل المستطيل المحيط بالمشغولة من خالل رسم خطوط مستقيمة تصل يعمل البرنامج على .(58-6)كما هو مبين في الشكل ( ، ، ، ) المستطيلبين زوايا
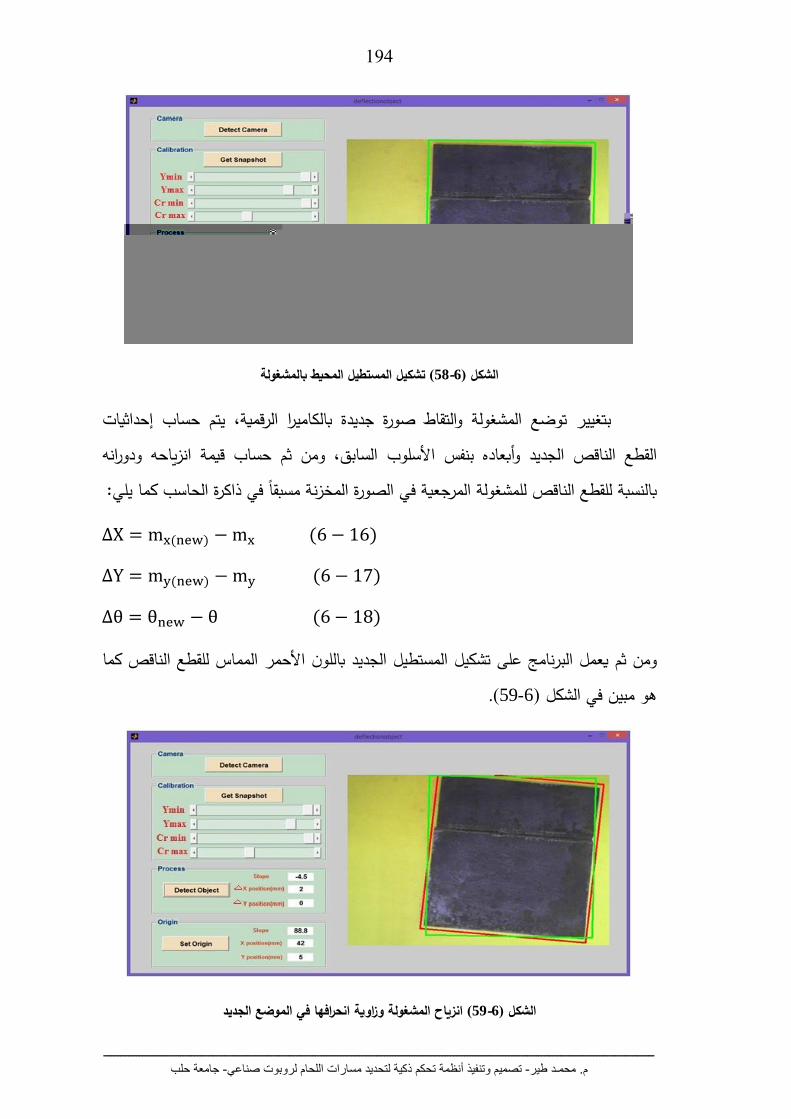
194
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
تشكيل المستطيل المحيط بالمشغولة (58-6)الشكل
إحداثياتبتغيير توضع المشغولة والتقاط صورة جديدة بالكاميرا الرقمية، يتم حساب ودورانهالسابق، ومن ثم حساب قيمة انزياحه األسلوببنفس وأبعادهالقطع الناقص الجديد
بالنسبة للقطع الناقص للمشغولة المرجعية في الصورة المخزنة مسبقا في ذاكرة الحاسب كما يلي:
المماس للقطع الناقص كما األحمرتشكيل المستطيل الجديد باللون يعمل البرنامج على ومن ثم .(59-6)هو مبين في الشكل
انزياح المشغولة وزاوية انحرافها في الموضع الجديد (59-6)الشكل
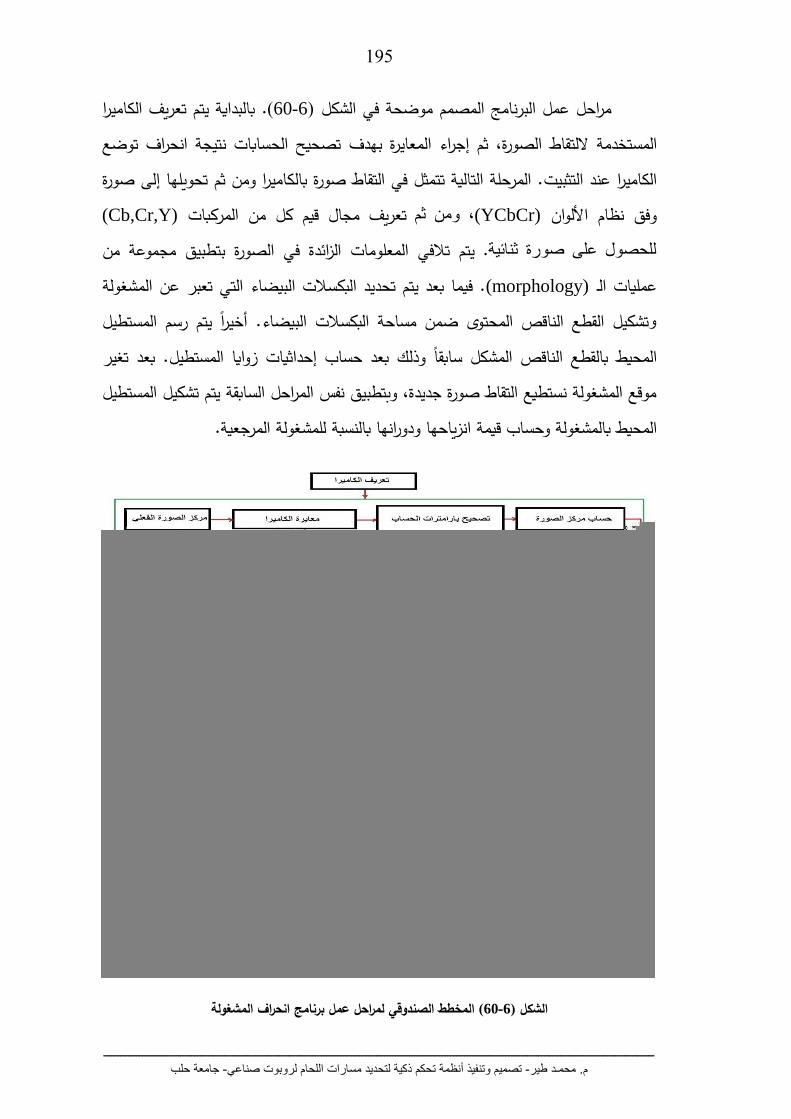
195
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
بالبداية يتم تعريف الكاميرا .(60-6)موضحة في الشكل مراحل عمل البرنامج المصممتصحيح الحسابات نتيجة انحراف توضع الصورة، ثم إجراء المعايرة بهدف اللتقاطالمستخدمة
صورة إلىصورة بالكاميرا ومن ثم تحويلها التقاط. المرحلة التالية تتمثل في الكاميرا عند التثبيت (Cb,Cr,Y)المركبات تعريف مجال قيم كل من، ومن ثم (YCbCr)وفق نظام األلوان
يتم تالفي المعلومات الزائدة في الصورة بتطبيق مجموعة من .للحصول على صورة ثنائية . فيما بعد يتم تحديد البكسالت البيضاء التي تعبر عن المشغولة(morphology)عمليات الـ
يتم رسم المستطيل تشكيل القطع الناقص المحتوى ضمن مساحة البكسالت البيضاء. أخيرا وك بعد حساب إحداثيات زوايا المستطيل. بعد تغير وذل المحيط بالقطع الناقص المشكل سابقا
موقع المشغولة نستطيع التقاط صورة جديدة، وبتطبيق نفس المراحل السابقة يتم تشكيل المستطيل حساب قيمة انزياحها ودورانها بالنسبة للمشغولة المرجعية.المحيط بالمشغولة و
انحراف المشغولة المخطط الصندوقي لمراحل عمل برنامج (60-6)الشكل
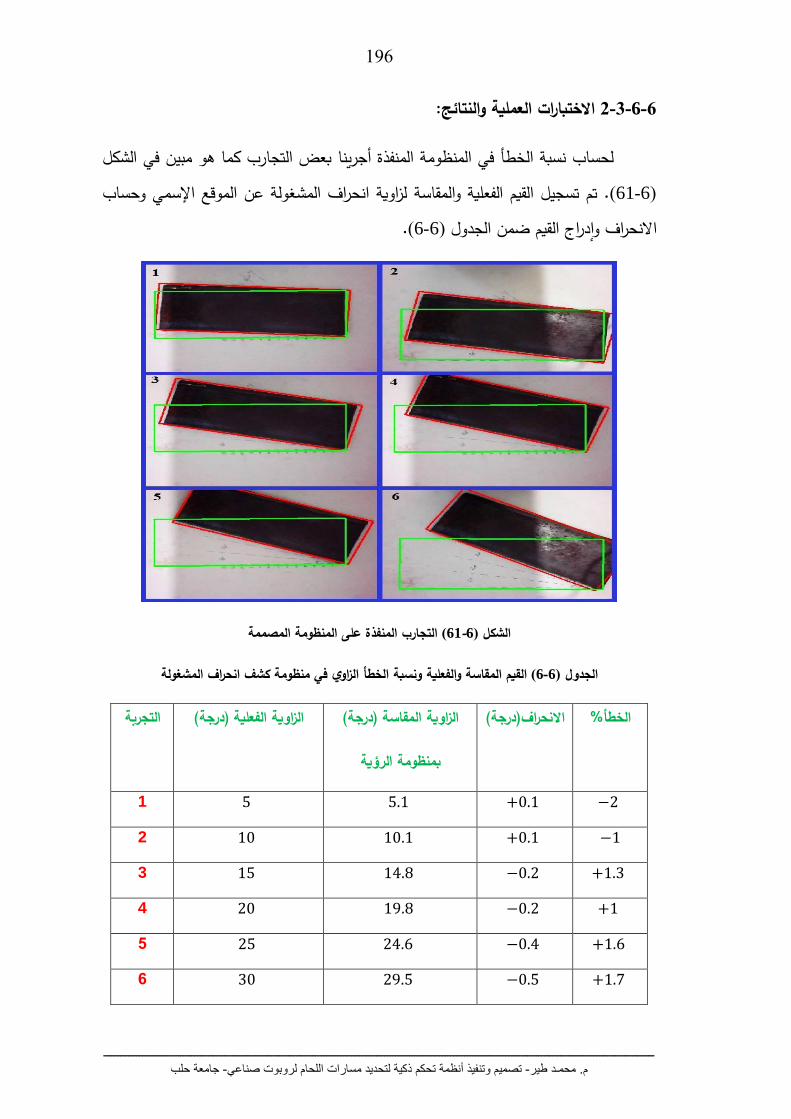
196
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
االختبارات العملية والنتائج: 6-6-3-2
الشكل في بعض التجارب كما هو مبين أجرينا في المنظومة المنفذة الخطأ نسبةلحساب وحساب اإلسميلزاوية انحراف المشغولة عن الموقع والمقاسة. تم تسجيل القيم الفعلية (6-61)
دراج القيم ضمن الجدول .(6-6) االنحراف وا
التجارب المنفذة على المنظومة المصممة (61-6)الشكل
في منظومة كشف انحراف المشغولة الخطأ الزاوي نسبة والفعلية و المقاسةالقيم (6-6) جدولال
)درجة( المقاسةالزاوية االنحراف)درجة( الخطأ%
بمنظومة الرؤية
التجربة )درجة( الزاوية الفعلية
1
2
3 3
4
5
3 6
197
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
(62-6)بعض التجارب لتحديد قيمة انزياح المشغولة كما هو مبين بالشكل أجريناكما نسبة وحساب االنحراف و اإلسميالمشغولة عن الموقع النزياح والمقاسةوتم تسجيل القيم الفعلية
دراج القيم ضمن الجدول .(7-6) الخطأ وا
تجارب إزاحة المشغولة (62-6)الشكل
في منظومة كشف انحراف المشغولة االنزياحخطأ نسبةوالفعلية و المقاسةالقيم (7-6) جدولال
(mm)االنزياح المقاس (mm) االنحراف الخطأ%
بمنظومة الرؤية
التجربة (mm) الفعلي االنزياح
1
2
3 3
3 3 4
3 5
3 6
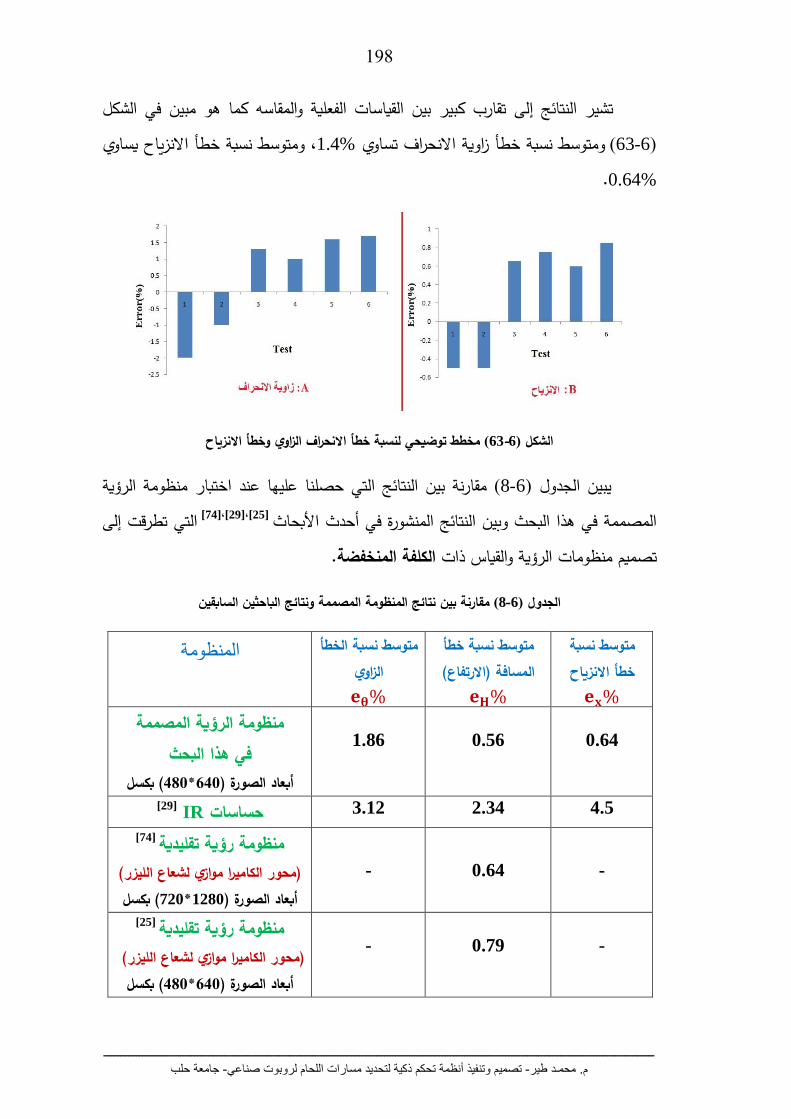
198
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الشكلفي كما هو مبين هتشير النتائج إلى تقارب كبير بين القياسات الفعلية والمقاسخطأ االنزياح يساوي نسبة، ومتوسط %1.4خطأ زاوية االنحراف تساوي نسبةومتوسط (6-63)
0.64%.
االنزياحخطأ االنحراف الزاوي وخطأ نسبةمخطط توضيحي ل (63-6)الشكل
مقارنة بين النتائج التي حصلنا عليها عند اختبار منظومة الرؤية (8-6)يبين الجدول إلىالتي تطرقت [74] ،[29]، [25]األبحاث أحدث المصممة في هذا البحث وبين النتائج المنشورة في
.الكلفة المنخفضةوالقياس ذات ةتصميم منظومات الرؤي
الباحثين السابقينمقارنة بين نتائج المنظومة المصممة ونتائج (8-6) جدولال
متوسط نسبة خطأ االنزياح
متوسط نسبة خطأ المسافة )االرتفاع(
سط نسبة الخطأ و مت الزاوي
المنظومة
0.64
0.56
1.86
منظومة الرؤية المصممة في هذا البحث
بكسل (481*641أبعاد الصورة ) IR [29]حساسات 3.12 2.34 4.5
-
0.64
-
[74]منظومة رؤية تقليدية )محور الكاميرا موازي لشعاع الليزر(
بكسل (720*1280أبعاد الصورة )
-
0.79
- [25]منظومة رؤية تقليدية
)محور الكاميرا موازي لشعاع الليزر( بكسل (481*641أبعاد الصورة )

199
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لذا نوصي بتزويد ،من خالل المقارنة نالحظ كفاءة المنظومة المصممة في هذا البحث، بحيث تميل زاوية محور الكاميرا المقترح روبوتات اللحام بمنظومة قياس تملك نفس التصميماألدق المطلوب. كما نوصي باستخدام العملبالنسبة لشعاع الليزر بزاوية محددة مرتبطة بمجال
.للمنظومةتجهيزات )كاميرا وليزر( تملك دقة عالية للحصول على نتائج أفضل
:روبوتبال يةالرؤ منظومةربط 6-7
برنامج ربط منظومة الرؤية المصممة مع في بحثال هذا المرحلة األخيرة فيتتمثل . في البداية ننسب إحداثيات مسار اللحام (64-6)التحكم بالروبوت كما هو مبين في الشكل ما هو مبين في ــــك وتــــــللروبالمؤثر النهائي داثيات ـــــالمستنتجة في برنامج منظومة الرؤية إلى إح
زوايا مفاصل الروبوت. علىومن ثم بتطبيق معادالت الحركة العكسية نحصل (65-6) الشكل
ربط الروبوت بمنظومة الرؤية (64-6)الشكل
نسب جملة اإلحداثيات بين منظومة الرؤية والروبوت (65-6)الشكل

200
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لتقييم أداء عمل الروبوت ودقة نتائج منظومة الرؤية العملية لتجاربأجرينا بعض ااستعنا بورق . مسار اللحام المطلوبعلى للروبوت وقدرتها على توجيه المؤثر النهائي المصممة
(9-6)يبين الجدول حيث مليمتري وبياكوليس إلكتروني لقياس موقع المؤثر النهائي للروبوتفراغ (66-6)، ويبين الشكل حركة المؤثر النهائي للروبوت النتائج التي حصلنا عليها عند اختبار
.العمل النهائي للروبوت بوجود الطاولة كعائق أمام الروبوت
لمؤثر النهائي للروبوت لنتائج اختبار دقة توجيه منظومة الرؤية (9-6) جدولال
Test Method √ 1 Simulated 477.85 23.10
0.06
0.20
0.063
310.05
0.06 Actual 478.15 23.05 309.85
2 Simulated 480.55 14.05
0.01
0
0.01
313.25
0.01 Actual 480.60 14.05 313.20
3 Simulated 482.90 45.95
0.03
0.01
0.032
315.95
0.02 Actual 483.05 45.90 315.90
4 Simulated 486.60 97.10
0.02
0.05
0.054
320.35
0.03 Actual 486.50 97.05 320.25
5
Simulated 489.75 139.80
0.03
0.07
0.076
323.95
0.01 Actual 489.90 139.70 323.90
العائق )الطاولة(فراغ العمل النهائي للروبوت بوجود (66-6)الشكل
201
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
:خالصةال 6-8
إن معايير تقييم كفاءة أي تصميم مقترح تعتمد على الدقة وسرعة األداء وسهولة تصميم منظومةالفصل، حيث تمكنا في البداية من هذااالستعمال والكلفة. من هنا جاءت أهمية
على اللحام مشعلتمركز بحيث نضمن ستعانة بالليزر الخطيلتحديد مسار اللحام باال رؤيةبين مشعل اللحام والمشغولة االرتفاعضبط طورنا المنظومة لتشملكما .طول الوصلة اللحامية
تطوير آللية منهجية قدمناأخيرا .ضمن مجال محدد مناسب لمتطلبات االستخدام وتعمل بدقة، والتالي يستطيع الروبوت إلسمياتحديد مدى انحراف المشغولة عن الموقع تشمل منظومة لال
بشكل ذاتي في حال حدوث أي انحراف لموضع المؤثر النهائي التعديل المناسب لمسارإجراء المشغولة المراد لحامها.
معالجة اتمليبرنامج ضمن بيئة ماتالب لتنفيذ عتصميم و الحل اتبناء خوارزميتم جراء العمليات الحسابية المطلوبة وأنها ة المنظومات المصممةالتجارب وثوقيأثبتت .الصورة وا
مات المنفذة تهدف الستخدام المنظو مخبرية. هذا يعتبر مساهمة علمية و جيدةتعمل بدقة البرنامج المصمم كأداة تعليمية للباحثين في مجال أنظمة الرؤية للروبوتات.و
202
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
الخاتمةويساهم في تطوير أداء روبوتات قدمنا في هذا البحث حال فنيا جيدا يخدم الصناعة
التي قام بها مجموعة من الباحثين األبحاثبتقديم عرض تفصيلي لبعض ناانطلق حيث. اللحامبهدف دراسة السلوك الحركي للروبوت وأهمية تزويد الروبوتات بتقنيات الرؤية الحاسوبية، حيث
قدم الباحثين رؤيتهم ومقترحاتهم.
الرياضي لروبوت يملك خمس درجات حرية ومن ثم الموديل ببناءالخطوة التالية تمثلت ، حيث Matlab نامجتطوير إطار برمجي باالستعانة بالبرمجيات المتوفرة والتي تخدم بحثنا كبر
روبوت دون االستعانة بالمكتبات الجاهزة لللمحاكاة الحركة األمامية والعكسية صممنا برنامج مرونة عند استخدام البرنامج ويسمح للمستخدم بإجراء والخاصة بدراسة الروبوتات مما يتيح
. كما اقترحنا االستعانة بمعادالت تقاطع دائرتين لحساب عديالت المطلوبة ألي روبوت مفترضالتأثبتت النتائج مساهمة هذه .بعض زوايا مفاصل الروبوت أثناء حل المسألة الحركية العكسية
.ضمن البرنامج البيانات اختصار زمن معالجةالطريقة الهندسية في
النموذج الديناميكي لروبوت يملك خمس درجات إليجادطريقة منهجية فيما بعد قدمنا ومن ثم صممنا برنامج ضمن بيئة ماتالب لتنفيذ العمليات ،على نظرية الغرنج عتمادباالحرية
وعرض مخططات توضح العزم الالزم لتدوير مفاصل الروبوت وفق مسار محدد الحسابية االستعانةمن خالل فيه تم زيادة كفاءة البرنامج وسرعة تنفيذ العمليات الحسابيةمفترض.
.كأسلوب للحلوحلقات التكرار بالمصفوفات
نمذجة نموذج حقيقي للروبوت من أجل التحقق من صحة ال إلى تصنيعانتقلنا بعد ذلك برنامج ب روبوت في مخبر الكلية، حيث تم االستعانةنظرا لعدم توفر وذلك ،والمحاكاة المطورة
Solidworks تهحركلمحاكاة تصميم الروبوت وعرض قيود حركته ومن ثم نفذنا من اجل.
يمكن من خاللها إجراء محاكاة منخفضة الكلفة متطورةرؤية منظومة الحقا صممنا ارتفاعضبط طورنا المنظومة لتشمل . أيضا المشعل على طول الوصلة اللحاميةواقعية لتمركز كما تم تصميم برنامج ضمن بيئة ماتالب لتنفيذ . على طول الوصلة اللحامية مشعل اللحام
جراء العمليات الحسابية الالزمة اتعملي تحديد مدى انحراف وتم تطويره ليشمل معالجة الصورة وا

203
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
لحمل منصة . بهدف اختبار منظومة الرؤية المصممة تم تصنيعاالسمي المشغولة عن الموقعالحاسب الذي إلىرسل ت من ثم صور و الكاميرا الرقمية والليزر الخطي، حيث تلتقط الكاميرا ال
يقوم بدوره بتطبيق خوارزمية معالجة الصورة التي تم تطويرها ضمن برنامج ماتالب.
ومنظومة الرؤية عبر الحاسب ومن ثم الروبوت بينبروتوكول التخاطب أخيرا عرضنايعتبر البحث . هذاالروبوتالروبوت تغطي كافة مزايا هذا بللتحكم ةمتكاملصممنا واجهة تفاعلية
والروبوت ومنظومة الرؤية كأداة المصمم مساهمة علمية ومخبرية تهدف إلى استخدام البرنامج تعليمية للباحثين في مجال الروبوتات.
تتمثل بالنقاط التالية: الرسالةخالل مراحل واجهتنا بعض الصعوباتلقد
لبيع الدارات اإللكترونية الخاصة بقيادة محركات عدم توفر مراكز بيع معتمدة مخصصة - الروبوتات وعدم توفر الحساسات في السوق المحلية.
في كلية بسبب عدم وجود منهاج مخصص ، عدم معرفتنا المسبقة بتقنيات معالجة الصورة - .لتقنيات الرؤية في مجال التحكم والصناعة عديدةالرغم من التطبيقات الالهندسة الميكانيكية ب
معالجة عملية على في ساحة العمل اإلضاءةشدة تأثير الضجيج الناتج عن تغيرات - الصورة.
.ضلصعوبة الحصول على دعم مادي من أجل تنفيذ المشروع بشكل أف -
وقد اكتسابنا العديد من الخبرات المشروعهذا إنجاز هللارغم هذه الصعوبات تم بعون نأمل كما ،الروبوتيكم لع بعض األفكار الجديدة فينأمل أن نكون قد أضفنا العملية أثناء تنفيذه.
الرؤية أن يكون البحث قد غطى ما أمكن من أفكار أساسية ومفيدة في مجال االستعانة بتقنيات ضبط مسارات اللحام.تحديد و الحاسوبية ل

204
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
فاق مستقبليةآ
من حيز العمل المخبري إلى التطبيق العملي على أرض الواقع ا البحثخرج هذينأمل أن في المجاالت الصناعية المتعددة والمتنوعة. كما نوصي بمتابعة البحث ضمن هذا المجال من
خالل النقاط التالية:
إضافة درجة حرية سادسة لكي يصبح قادرا على تتبع مسار كافة وضعيات بتطوير الروبوت - اللحام.
وتخميد دراسة استجابة المحركات والعطاالت الميكانيكية للحصول على دقة أكبر في الحركة - . لإلهتزازات
قيم وتزويده بأنظمة تحكم ذكية قادرة على ضبط ،استثمار الروبوت لتنفيذ عمليات لحام - بارامترات اللحام بشكل ذاتي أثناء تنفيذ عملية اللحام.
دراسة تأثير تغير شدة اإلضاءة في محيط العمل على نتائج معالجة الصورة. -االستعاضة عن منصة حمل الكاميرا بتركيب كاميرا السلكية مباشرة على المؤثر النهائي -
لكه.للروبوت من اجل تجنب العقبات ومشاهدة المسار الذي يساللحام تطوير منظومة الرؤية من خالل استخدام مرشحات للكاميرا والليزر بهدف تتبع مسار -
.أثناء تنفيذ عملية اللحام تطوير البرنامج المصمم ليشمل االستعانة بمنظومة رؤية لكشف عيوب اللحام وتقييم جودته. -الروبوت وتحديد توظيف خوارزميات الذكاء الصنعي كالشبكات العصبونية للتحكم بأذرع -
مسارات اللحام بشكل أدق.
205
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
References
[1]. United Nations and International Federation of Robots "World
Industrial Robots : Statistics and Forecasts" New York: ONU/IFR,
2000.
[2]. Bob Williams "An Introduction to Robotics" ME 4290/5290
Mechanics and Control of Robotic Manipulators, Mechanical
Engineering Course, Ohio University Ohio University, 2014.
[3]. Johanna Wallén "The history of the industrial robot" Technical
reports from the Automatic Control group in Linköping, 2008.
[4]. NORBERTO.J, ALTINO.L, GUNNAR.B "Welding Robots
Technology, System Issues and Applications" Springer-Verlag
London Limited, ISBN-10, PP:17-22, 2006.
[5]. Wesley L.Stone "The History of Robotics" Western Carolina
University, 2005.
[6]. "History of Industrial Robots" Compiled by the International
Federation of Robotics – IFR, 2012.
[7]. "Positive Impact of Industrial Robots on Employment" Compiled
by the International Federation of Robotics – IFR, 2015.
[8]. Arabic Robot, (http://www.robotarab.com/), 2014.
[9]. World Robot Olympiad, (http://www.wro2012.org/), 2014.
[10]. Arabic Robot, (http://www.robotarab.com/), 2014.
[11]. NORBERTO.J, ALTINO.L, GUNNAR.B "Welding Robots
Technology, System Issues and Applications" Springer-Verlag
London Limited, ISBN-10, PP:23-29, 2006.
[12]. Cary, Howard B "Arc Welding Automation" Marcel Dekker, Inc
,ISBN 0-8247-9645-4, 1995.
[13]. Anatoly P. Pashkevicha, b, Alexandre B. Dolguia, Konstantin I.
Semkin" Kinematic aspects of a robot-positioner system in an arc
welding Application" science direct, Control Engineering Practice
11, PP:633–647, 2003.
[14]. C.A. Acosta Calderon, E.M. Rosales Pena Alfaro, J.Q. Gan,H. Hu
"Trajectory Generation and Tracking of 5-Dof Robotic Arm"
Conf.on Applied Informatics, Innsbruck, Austria, 2006.
[15]. ANURAG VERMA1, MEHUL GOR "Forward Kinematics
Analysis of 6-Dof Arc Welding Robot" International Journal of
Engineering Science and Technology Vol.2 (9), PP:4682-4686,
2010.
[16]. Mahidzal Dahari1, Jian-Ding Tan "Forward and Inverse
Kinematics Model for Robotic Welding Process Using KR-16KS
KUKA Robot" IEEE International Conference on Robotics and
Automation, 978-1-4577-0005-7/11, 2010.

206
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[17]. Francesco Chinello, Stefano Scheggi, Fabio Morbidi, Domenico
Prattichizzo "The KUKA Control Toolbox : motion control of
KUKA robot manipulators with Matlab" IEEE robotics and
automation magazine, 2010.
[18]. Tahseen Fadhil Abbas "Forward Kinematics Modeling of 5DOF"
Stationary Articulated Robots Eng &Tech Journal, Vol.31, No.3,
2013.
[19]. K.Kumar, A.Srinath, G.Jugal anvesh, R.Prem sai, M.suresh
"Kinematic Analysis and Simulation of 6Dof Kuka Kr5 Robot For
Welding Application" International Journal of Engineering
Research and Applications (IJERA), Vol. 3, Issue 2, PP:820-827,
2013.
[20]. M.F.Aly, A.T.Abbas "Simulation of obstacles effect on industrial
robots working space using genetic algorithm" Journal of King
Saud University – Engineering Sciences 26, PP:132–143, 2014.
[21]. Volker Graefe "Object- and Behavior-oriented Stereo Vision for
Robust and Adaptive Robot Control" MIMR 95.Sendai, 1995.
[22]. Marku Christian Amann, Thierry Bosch, Risto Myllyla, Marc
Rioux "Laser ranging: a critical review of usual techniques for
distance measurement" Society of Photo-Optical Instrumentation
Engineers 40(1), PP:10–19, 2001.
[23]. Ashutosh Saxena, Justin Driemeyer, Andrew.Ng "Robotic
Grasping of Novel Objects using Vision" Neural Information
Processing Systems (NIPS) No.19, 2006.
[24]. Kurt Konolige, Joseph Augenbraun, Nick Donaldson, Charles
Fiebig, Pankaj Shah "Low-Cost Laser Distance Sensor" IEEE
International Conference on Robotics and Automation, PP:19-23,
2008.
[25]. Shahed Shojaeipoura, Sallehuddin Mohamed Harisa, Ali
Shojaeipourb, Rassoul Keshvari Shirvana, Muhammad Khalid
Zakaria "Robot Path Obstacle Locator using Webcam and Laser
Emitter" Science Direct, Physics Procedia 5, PP:187–192, 2010.
[26]. Amit Agrawal, Yu Sun, John Barnwell, Ramesh Raskar "Vision
Guided Robot System for Picking Objects by Casting Shadows"
International Journal of Robotics Research, 2009.
[27]. Jesus.P, Christian.E "Robust range finder through a laser pointer
and a webcam" Published by Elsevier Science B.V, 2011.
[28]. H.C.Fanga, S.K.Onga, A.Y.C.Neea "Robot Path and End Effector
Orientation Planning Using Augmented Reality" Science Direct,
Procedia CIRP 3, PP:191 – 196, 2012.
[29]. Yongtae Do, Jongman Kim "Infrared Range Sensor Array for 3D
Sensing in Robotic Applications" International Journal of
Advanced Robotic Systems, Vol.10, 2013.
207
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[30]. Kensuke Harada, Takashi Yoshimi, Yasuyo Kita, Kazuyuki
Nagata "Project on Development of a Robot System for Random
Picking–Grasp/Manipulation Planner for a Dual-Arm
Manipulator" IEEE/SICE International, Symposium on System
Integration, Chuo University, Tokyo, Japan, 2014.
[31]. Marcelo H.Ang, Wei Lin, Ser-Yong Lim "A Walk-Through
Programmed Robot for Welding in Shipyards" Industrial Robot,
Vol.26, No.5, PP:377-388, 1999.
[32]. Andrew Shacklock, Luo Hong, Huang Sheng, Jenny Wang Jie
"Intelligent Robotic GTAW System for 3D Welding" SIMTech
Technical Report (AT/01/013/AMP), 2001.
[33]. Sadek Alfaro, Paul Drews "Intelligent Systems for Welding
Process Automation" J. of the Braz. Soc of Mech.Sci. & Eng,
2006.
[34]. Peiquan Xu, Xinhua Tang, Ri.Na, Shun Yao "Study on welded
seam recognition using circular laser vision sensor" Chinese
Optics Letters, Vol.5, No.6, 2007.
[35]. I Lopez-Juarez, R.Cabrera, I Davila Rios "Trajectory
Compensation and Learning in Robotic Welding Environments"
ISBN 978-953-7619-X-X. Edited by IN-TECH, Vienna, Austria,
2009.
[36]. F.Abta, A.Heidera, R.Webera, T.Grafa "Camera Based Closed
Loop Control for Partial Penetration Welding of Overlap Joints"
science direct, Physics Procedia 12, PP:730–738, 2011.
[37]. D.Antonelli, S.Astanin, M.Galetto, L.Mastrogiacomo "Training
by demonstration for welding robots by optical trajectory
tracking" Science Direct, Procedia CIRP 12, PP:145–150, 2013.
[38]. Luis Landa, Fabian Mamani, Harold Valenzuela, Manuel Fuentes,
Ricardo Mendoza "Kinect-Based Trajectory Teaching for
Industrial Robots" 14th Pan-American Congress of Applied
Mechanics-PACAM XIV, 2014.
[39]. V´aclav Hlav´a "ROBOT KINEMATICS" Center for Machine
Perception 121 35 Praha 2, Karlovo n´am.13, Czech Republic,
2006.
[40]. Mark W.Spong, Seth Hutchinson, M.Vidyasagar "Robot
Modeling and Control" First Edition, John Wiley & Sons.INC,
PP:41-52, 2000.
[41]. C.Yavuz, Coskun Yetim "Kinematic Analysis for Robot Arm"
Yildiz Technical University, Electrical and Electronics Faculty,
2009.
[42]. Mark W.Spong, Seth Hutchinson, M.Vidyasagar "Robot
Modeling and Control" First Edition, , John Wiley & Sons.INC,
PP:171-178, 2000.
208
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[43]. Peter Corke "Robotics Toolbox for MATLAB" Manufacturing
Science and Technology, Pinjarra Hills, Australia.Inc.81, 2001.
[44]. Jorge Angeles "Fundamentals of Robotic Mechanical System
:Theory, Methods and Algorithms" Second Edition ,Springer –
Verlag, New York, 2003.
[45]. Roy Featherstone "Robot Dynamics: Equations and Algorithms"
Department of Computer Science University of Wales,
Aberystwyth Penglais, Aberystwyth SY23 3DB, Wales,UK, 2010.
[46]. Zaharia.S, Filip.V "A Symbolic Computational Method for a
Dynamic Model of Robot Manipulators" Proceeding of 2nd
International Conference on Engineering Computational
Technology Leuven, Belgium, PP:51-56, 2000.
[47]. Zaharia.S, Filip.V "A Symbolic Computational Method for a
Dynamic Model of Robot Manipulators" Proceeding of 2nd
International Conference on Engineering Computational
Technology Leuven, Belgium, PP:71-79, 2000.
[48]. Filip.V "Dynamic Modeling of Manipulators with Symbolic
Computational Method" Proceedings of the Romanian Academy,
Series A, 2008.
[49]. Alain Chamaken "Kinematic and Dynamic Modeling of a Robotic
Arm" Master Thesis MA 07/01, University of Kaiserslautern,
Departement of Electrical and Computer Engineering Institute of
Control Systems, 2007.
[50]. John Faber Archila Díaz " Kinematical and Dynamical Models of
KR 6 KUKA Robot, including the kinematic control in a parallel
processing platform" Publisher InTech, ISBN 978-953-307-090-2,
2010.
[51]. LAHDEN, Tekniikan ala, Kone ja, Mekatroniikka "The Basic of
Robotics" Lahti University of Applied Sciences, Machine and
production technology , Mechatronics thesis, 122 pages, 2012.
[52]. M.F.Aly, A.T.Abbas "Simulation of obstacles’ effect on industrial
robots working space using genetic algorithm" Journal of King
Saud University – Engineering Sciences 26, PP:132–143, 2014.
[53]. Jericho "Stepper Motor System Basics" Advanced Micro Systems
,Inc.6, 2008.
[54]. Robert Pirsig "Helical, Bevel and Worm Gears" CRCPress,
Fundamentals of Machine Elements, 2014
[55]. Paul E.Sandin "Robot Mechanisms and Mechanical Devices
Illustrated" Book Copyright by The McGraw-Hill Companies.Inc,
2003.
[56]. Construction and Principles of Operation of Photoelectric
Sensors" Pepperl-Fuchs Group, Germany, 2009.
209
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
[57]. Jegede Olawale, Awodele Oludele, Ajayi Ayodele, Ndong Miko
Alejandro "Development of a Microcontroller Based Robotic
Arm" Proceedings of the Computer Science and IT Education
Conference, 2007.
[58]. Compaq, Intel, Microsoft "Universal Serial Bus Specification" For
industry Information, 2000.
[59]. Ewert.B "Digital Cameras, CMOS and CCD Sensors" Center of
Image Analysis, Uppsala University, Lecture3, 2008.
[60]. H.J.C. Luijte "Basics of color based computer vision implemented
in Matlab" Traineeship report, Dynamics and Control Technology
Group, Technische Universiteit Eindhoven, 2005.
[61]. K.M.M.Rao "Overview of Image Processing" Reading in Image
Processing, National Remote Sensing Agency, India, 2004.
[62]. Bae.K, Park.J "A study on development of inductive sensor for
automatic weld seam tracking" Journal of Materials Processing
Technology 176, PP:111–116, 2006.
[63]. Gunnar Bolmsjo, Magnus Olsson, Per Cederberg "Robotic Arc
Welding -Trends and Developments for Higher Autonomy
Division of Robotics" Mechanical Engineering, Lund University,
Sweden, 2001.
[64]. J.Norberto Pires, T Godinho, P.Ferreira "CAD Interface for
Automatic Robot Welding Programing" An International Journal,
Volume 31, PP:71-76, 2004.
[65]. Marcelo H. Ang Jr, Wei Lin, Ser-Yong Lim "A Walk-Through
Programmed Robot for Welding in Shipyards" Industrial Robot,
Vol.26, No.5, PP:377-388, 1999.
[66]. Mikael Fridenfalk, Gunnar Bolmsjo "Design and validation of a
universal 6D seam tracking system in robotic welding based on
laser scanning" Mechanical Engineering ,Lund University,
Sweden, 2008.
[67]. NORBERTO.J, ALTINO.L, GUNNAR.B "Welding Robots
Technology, System Issues and Applications" Springer-Verlag
London Limited, ISBN-10, PP:108-110, 2006.
[68]. Bae.K, Y.Lee, Ahn.K "An optical sensing system for seam
tracking and weld pool control in gas metal arc welding of steel
pipe" Journal of Materials Processing Technology 120, PP:458–
465, 2002.
[69]. William T.Silfvast "Lasers" Fundamentals of Photonics Courses
in University of Central Florida, 2003.
[70]. Tim Morris "Image Processing with Matlab" Supporting Material
for COMP27112, England, 2008.
[71]. Amalorpavam.G, Harish Naik T, Jyoti Kumari, Suresha M
Assistant "Analysis of Digital Image Using Images Using
210
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
Morphlogical Operations" International Journal of Computer
Science & Information Technology (IJCSIT), 2013.
[72]. Markus-Christian Amann, Thierry Bosch, Risto Myllyla "Laser
ranging: a critical review of usual techniques for distance
measurement" Society of Photo-Optical Instrumentation
Engineers, 2001.
[73]. Yas A.Alsultanny "Laser Beam Analysis Using Image
Processing" Journal of Computer Science 2 (1), PP:109-113,
2006.
[74]. Joe Grand "Development The Parallax Laser Range Finder"
http://grandideastudio.com,Expo West, 2011.

211
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
(A) الملحق
كتابته تم والذي سطر، 3027المصمم المكون من الكود البرمجيأهم أجزاء يعرض هذا الملحق دراجه .ماتالبالضمن برنامج وا
A-1- :نافذة إدراج زوايا مفاصل الروبوت
global qz;
global qr;
global t;
global t0;
global te;
global s;
global qz1;
global qz2;
global qz3;
global qz4;
global qz5;
global qr1;
global qr2;
global qr3;
global qr4;
global qr5;
في الواجهات الالحقة. جميع المتغيرات إدراجاألسلوب يتم بنفس هذا -tex=get(handles.edit1,'string');
qz1=str2double(tex)*pi/180;
tex=get(handles.edit2,'string');
qz2=str2double(tex)*pi/180;
tex=get(handles.edit3,'string');
qz3=str2double(tex)*pi/180;
tex=get(handles.edit4,'string');
qz4=str2double(tex)*pi/180;
tex=get(handles.edit5,'string');
qz5=str2double(tex)*pi/180;
tex=get(handles.edit6,'string');
qr1=str2double(tex)*pi/180;
tex=get(handles.edit7,'string');
qr2=str2double(tex)*pi/180;
tex=get(handles.edit8,'string');
qr3=str2double(tex)*pi/180;
tex=get(handles.edit9,'string');
qr4=str2double(tex)*pi/180;
tex=get(handles.edit10,'string');
qr5=str2double(tex)*pi/180;
tex=get(handles.edit13,'string');
t0=str2double(tex);
tex=get(handles.edit16,'string');
212
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
s=str2double(tex);
tex=get(handles.edit15,'string');
te=str2double(tex);
qz=[qz1 qz2 qz3 qz4 qz5];
qr=[qr1 qr2 qr3 qr4 qr5];
t=[t0:s:te];
close;
A-2- :نافذة إدراج بارامترات أذرع الروبوت وعرض مصفوفات التحويل
global A1;
global A2;
global A3;
global A4;
global A5;
global qz1;
global qz2;
global qz3;
global qz4;
global qz5;
global qr1;
global qr2;
global qr3;
global qr4;
global qr5;
global a1;
global s1;
global r1;
global a2;
global s2;
global r2;
global a3;
global s3;
global r3;
global a4;
global s4;
global r4;
global a5;
global s5;
global r5;
o11=qr1;
oo11=[cos(o11) -sin(o11) 0 0 ;sin(o11) cos(o11) 0 0;0 0 1
0;0 0 0 1];
A11=round(oo11*100)/100;
o22=qr2;
oo22=[cos(o22) -sin(o22) 0 0 ;sin(o22) cos(o22) 0 0;0 0 1
0;0 0 0 1];
A22=round(oo22*100)/100;
o33=qr3;

213
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
oo33=[cos(o33) -sin(o33) 0 0 ;sin(o33) cos(o33) 0 0;0 0 1
0;0 0 0 1];
A33=round(oo33*100)/100;
o44=qr4;
oo44=[cos(o44) -sin(o44) 0 0 ;sin(o44) cos(o44) 0 0;0 0 1
0;0 0 0 1];
A44=round(oo44*100)/100;
o55=qr5;
oo55=[cos(o55) -sin(o55) 0 0 ;sin(o55) cos(o55) 0 0;0 0 1
0;0 0 0 1];
A55=round(oo55*100)/100;
o1=qz1;
tex=get(handles.edit22,'string');
s1=str2double(tex);
tex=get(handles.edit27,'string');
a1=str2double(tex);
tex=get(handles.edit32,'string');
r1=str2double(tex)*pi/180;
oo1=[cos(o1) -sin(o1) 0 0 ;sin(o1) cos(o1) 0 0;0 0 1 0;0
0 0 1];
ss1=[1 0 0 0 ;0 1 0 0;0 0 1 s1;0 0 0 1];
aa1=[1 0 0 a1 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr1=[1 0 0 0 ;0 cos(r1) -sin(r1) 0 ;0 sin(r1) cos(r1)
0;0 0 0 1];
uz1=oo1*ss1*aa1*rr1;
u1=A11*uz1;
A1=round(u1*100)/100;
.عناصر المصفوفات الالحقةجميع األسلوب يتم عرض بنفس هذا -set(handles.edit1,'string',num2str(A1(1,1)));
set(handles.edit2,'string',num2str(A1(2,1)));
set(handles.edit3,'string',A1(3,1));
set(handles.edit4,'string',A1(4,1));
set(handles.edit5,'string',num2str(A1(1,2)));
set(handles.edit6,'string',num2str(A1(2,2)));
set(handles.edit165,'string',num2str(A1(3,2)));
set(handles.edit8,'string',A1(4,2));
set(handles.edit9,'string',num2str(A1(1,3)));
set(handles.edit10,'string',num2str(A1(2,3)));
set(handles.edit11,'string',num2str(A1(3,3)));
set(handles.edit12,'string',A1(4,3));
set(handles.edit13,'string',num2str(A1(1,4)));
set(handles.edit14,'string',num2str(A1(2,4)));
set(handles.edit15,'string',A1(3,4));
set(handles.edit16,'string',A1(4,4));
o2=qz2;
tex=get(handles.edit23,'string');
s2=str2double(tex);
tex=get(handles.edit28,'string');
a2=str2double(tex);
tex=get(handles.edit33,'string');

214
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
r2=str2double(tex)*pi/180;
oo2=[cos(o2) -sin(o2) 0 0 ;sin(o2) cos(o2) 0 0;0 0 1 0;0
0 0 1];
ss2=[1 0 0 0 ;0 1 0 0;0 0 1 s2;0 0 0 1];
aa2=[1 0 0 a2 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr2=[1 0 0 0 ;0 cos(r2) -sin(r2) 0 ;0 sin(r2) cos(r2)
0;0 0 0 1];
uz2=oo2*ss2*aa2*rr2;
u2=A22*uz2;
A2=round(u2*100)/100;
A66=A1*A2;
o3=qz3;
tex=get(handles.edit24,'string');
s3=str2double(tex);
tex=get(handles.edit29,'string');
a3=str2double(tex);
tex=get(handles.edit34,'string');
r3=str2double(tex)*pi/180;
oo3=[cos(o3) -sin(o3) 0 0 ;sin(o3) cos(o3) 0 0;0 0 1 0;0
0 0 1];
ss3=[1 0 0 0 ;0 1 0 0;0 0 1 s3;0 0 0 1];
aa3=[1 0 0 a3 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr3=[1 0 0 0 ;0 cos(r3) -sin(r3) 0 ;0 sin(r3) cos(r3)
0;0 0 0 1];
uz3=oo3*ss3*aa3*rr3;
u3=A33*uz3;
A3=round(u3*100)/100;
o4=qz4;
tex=get(handles.edit25,'string');
s4=str2double(tex);
tex=get(handles.edit30,'string');
a4=str2double(tex);
tex=get(handles.edit35,'string');
r4=str2double(tex)*pi/180;
oo4=[cos(o4) -sin(o4) 0 0 ;sin(o4) cos(o4) 0 0;0 0 1 0;0
0 0 1];
ss4=[1 0 0 0 ;0 1 0 0;0 0 1 s4;0 0 0 1];
aa4=[1 0 0 a4 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr4=[1 0 0 0 ;0 cos(r4) -sin(r4) 0 ;0 sin(r4) cos(r4)
0;0 0 0 1];
uz4=oo4*ss4*aa4*rr4;
u4=A44*uz4;
A4=round(u4*100)/100;
o5=qz5;
tex=get(handles.edit26,'string');
s5=str2double(tex);
tex=get(handles.edit31,'string');
a5=str2double(tex);
tex=get(handles.edit36,'string');
r5=str2double(tex)*pi/180;

215
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
oo5=[cos(o5) -sin(o5) 0 0 ;sin(o5) cos(o5) 0 0;0 0 1 0;0
0 0 1];
ss5=[1 0 0 0 ;0 1 0 0;0 0 1 s5;0 0 0 1];
aa5=[1 0 0 a5 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr5=[1 0 0 0 ;0 cos(r5) -sin(r5) 0 ;0 sin(r5) cos(r5)
0;0 0 0 1];
uz5=oo5*ss5*aa5*rr5;
u5=A55*uz5;
A5=round(u5*100)/100;
uu=A1*A2*A3*A4*A5;
A=round(uu*100)/100;
A-3- :نافذة تخطيط المسار
global qz;
global qr;
global t;
global t0;
global te;
global q;
global qd;
global qdd;
:Cubicتخطيط المسار وفق طريقة -v0=0;
ve=0;
n=[1 t0 t0^2 t0^3 ;0 1 2*t0 3*t0^2 ;1 te te^2 te^3 ;0 1
2*te 3*te^2 ];
h=inv(n);
q=zeros(5,length(t));
qd=zeros(5,length(t));
qdd=zeros(5,length(t));
for i=1:5
k=[qz(i) ; v0 ; qr(i) ; ve];
f=h*k;
q(i,:)=f(1)+f(2)*t+f(3)*t.^2+f(4)*t.^3;
qd(i,:)=f(2)+2*f(3)*t+3*f(4)*t.^2;
qdd(i,:)=2*f(3)+6*f(4)*t;
end
delete(gca)
set(handles.uipanel1,'visible','on')
subplot(3,1,1,'Parent',handles.uipanel1)
plot(t,q(1,:));
title('theta')
xlabel('Time (s)');
ylabel('Joint 1 (rad)')
subplot(3,1,2,'Parent',handles.uipanel1)
plot(t,qd(1,:));
title('Velocity')
xlabel('Time (s)');
ylabel('Joint1 (rad/s)')
subplot(3,1,3,'Parent',handles.uipanel1)

216
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
plot(t,qdd(1,:));
title('Acceleration')
xlabel('Time (s)');
ylabel('Joint1 (rad/s2)')
global q;
global a1;
global s1;
global r1;
global a2;
global s2;
global r2;
global a3;
global s3;
global r3;
global a4;
global s4;
global r4;
global a5;
global s5;
global r5;
global t;
global W1;
global W2;
global W3;
global W4;
global W5;
global W;
for i=1:length(t)
oo1=[cos(q(1,i)) -sin(q(1,i)) 0 0 ;sin(q(1,i))
cos(q(1,i)) 0 0;0 0 1 0;0 0 0 1];
ss1=[1 0 0 0 ;0 1 0 0;0 0 1 s1;0 0 0 1];
aa1=[1 0 0 a1 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr1=[1 0 0 0 ;0 cos(r1) -sin(r1) 0 ;0 sin(r1) cos(r1)
0;0 0 0 1];
uz1(:,:,i)=oo1*ss1*aa1*rr1;
W1=round(uz1*100)/100;
oo2=[cos(q(2,i)) -sin(q(2,i)) 0 0 ;sin(q(2,i))
cos(q(2,i)) 0 0;0 0 1 0;0 0 0 1];
ss2=[1 0 0 0 ;0 1 0 0;0 0 1 s2;0 0 0 1];
aa2=[1 0 0 a2 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr2=[1 0 0 0 ;0 cos(r2) -sin(r2) 0 ;0 sin(r2) cos(r2)
0;0 0 0 1];
uz2(:,:,i)=oo2*ss2*aa2*rr2;
W2=round(uz2*100)/100;
oo3=[cos(q(3,i)) -sin(q(3,i)) 0 0 ;sin(q(3,i))
cos(q(3,i)) 0 0;0 0 1 0;0 0 0 1];
ss3=[1 0 0 0 ;0 1 0 0;0 0 1 s3;0 0 0 1];
aa3=[1 0 0 a3 ;0 1 0 0;0 0 1 0;0 0 0 1];
217
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
rr3=[1 0 0 0 ;0 cos(r3) -sin(r3) 0 ;0 sin(r3) cos(r3)
0;0 0 0 1];
uz3(:,:,i)=oo3*ss3*aa3*rr3;
W3=round(uz3*100)/100;
oo4=[cos(q(4,i)) -sin(q(4,i)) 0 0 ;sin(q(4,i))
cos(q(4,i)) 0 0;0 0 1 0;0 0 0 1];
ss4=[1 0 0 0 ;0 1 0 0;0 0 1 s4;0 0 0 1];
aa4=[1 0 0 a4 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr4=[1 0 0 0 ;0 cos(r4) -sin(r4) 0 ;0 sin(r4) cos(r4)
0;0 0 0 1];
uz4(:,:,i)=oo4*ss4*aa4*rr4;
W4=round(uz2*100)/100;
oo5=[cos(q(5,i)) -sin(q(5,i)) 0 0 ;sin(q(5,i))
cos(q(5,i)) 0 0;0 0 1 0;0 0 0 1];
ss5=[1 0 0 0 ;0 1 0 0;0 0 1 s5;0 0 0 1];
aa5=[1 0 0 a5 ;0 1 0 0;0 0 1 0;0 0 0 1];
rr5=[1 0 0 0 ;0 cos(r5) -sin(r5) 0 ;0 sin(r5) cos(r5)
0;0 0 0 1];
uz5(:,:,i)=oo5*ss5*aa5*rr5;
W5=round(uz5*100)/100;
uz(:,:,i)=uz1(:,:,i)*uz2(:,:,i)*uz3(:,:,i)*uz4(:,:,i)*uz5
(:,:,i);
W=round(uz*100)/100;
end
delete(gca)
set(handles.uipanel1,'visible','on')
subplot(3,1,1,'Parent',handles.uipanel1)
plot(t, squeeze(W(1,4,:)))
xlabel('Time (s)');
ylabel('X (m)')
subplot(3,1,2,'Parent',handles.uipanel1)
plot(t, squeeze(W(2,4,:)))
xlabel('Time (s)');
ylabel('Y (m)')
subplot(3,1,3,'Parent',handles.uipanel1)
plot(t, squeeze(W(3,4,:)))
xlabel('Time (s)');
ylabel('Z (m)')
global W;
delete(gca)
set(handles.uipanel1,'visible','on')
subplot(1,1,1,'Parent',handles.uipanel1)
plot3(squeeze(W(1,4,:)),
squeeze(W(2,4,:)),squeeze(W(3,4,:)));
grid
: Quanticوفق طريقة تخطيط المسار -
global qz;
global qr;

218
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
global t;
global t0;
global te;
global q1;
global qd1;
global qdd1;
v10=0;
v1e=0;
aa10=0;
aa1e=0;
z=[1 t0 t0^2 t0^3 t0^4 t0^5 ;0 1 2*t0 3*t0^2 4*t0^3
5*t0^4; 0 0 2 6*t0 12*t0^2 20*t0^3; 1 te te^2 te^3 te^4
te^5 ;0 1 2*te 3*te^2 4*te^3 5*te^4 ;0 0 2 6*te 12*te^2
20*te^3 ];
x=inv(z);
q1=zeros(5,length(t));
qd1=zeros(5,length(t));
qdd1=zeros(5,length(t));
for i=1:5
k=[qz(i) ; v10; aa10 ;qr(i) ; v1e ; aa1e];
f=x*k;
q1(i,:)=f(1)+f(2)*t+f(3)*t.^2+f(4)*t.^3+f(5)*t.^4+f(6)*t.
^5;
qd1(i,:)=f(2)+2*f(3)*t+3*f(4)*t.^2+4*f(5)*t.^3+5*f(6)*t.^
4;
qdd1(i,:)=2*f(3)+6*f(4)*t+12*f(5)*t.^2+20*f(6)*t.^3;
end
A-4- :نافذة إجراء الدراسة الحركية العكسية % by Toolbox
global weld;
[filename path]=uigetfile({'*.dxf'},'Open CAD File');
puma560;
cadfile= textread([path filename ],'%s');
points=0;
for i=1:length(cadfile)
if strcmpi('acdbpoint',cadfile(i))
points=points+1;
xyz(points,:)=[[str2double(cadfile(i+2)),
str2double(cadfile(i+4)), str2double(cadfile(i+6))]];
end
end
x0=xyz(1,1);
y0=xyz(1,2);
z0=xyz(1,3);
for i=1:1:length(xyz)
xyz(i,:)=[(xyz(i,1)-x0+0)/1,(xyz(i,2)-
y0)/1,(xyz(i,3)-z0)/1];
end
219
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
set(handles.uipanel1,'visible','off')
delete(gca);
delete(get(handles.uipanel1,'children'))
plot(weld,[0 0 0 0 0 ],'nowrist','noerase');
hold on
plot3(xyz(:,1),xyz(:,2),xyz(:,3));
T1 = transl(xyz(1,:));
tempq = ikine(weld, T1, [0 0 0 0 0 ]);
q(1,:)=tempq;
for i=2:1:(length(xyz)-1)
T1 = transl(xyz(i,:));
tempq = ikine(weld, T1, q((i-1),:))
q(i,:)=tempq
end
plot(weld,q)
% by equations
function theta=Inverse(p)
l1=250;
l2=245;
l3=160;
orix=p(1);
oriy=p(2);
oriz=p(3);
p(2)=p(2)-l3*cos(pi/3);
p(3)=z+l3*sin(pi/3);
v=[orix-p(1);oriy-p(2);oriz-p(3)];
theta1=atan2(p(2),p(1));
zrotate=[cos(theta1) sin(theta1) 0 ;-sin(theta1)
cos(theta1) 0 ;0 0 1];
np=zrotate*p;
nv=zrotate*v;
[ix iy]=circcirc(0,0,l1,np(1),np(3),l2);
ixmax=ix(1);
iymax=iy(1);
if(iymax<iy(2))
ixmax=ix(1);
iymax=iy(1);
end
theta2=atan2(iymax,ixmax);
theta3=(pi-theta2+atan2(np(3)-iymax,np(1)-ixmax))/pi*180;
yang=pi/2-atan2(np(3)-iymax,np(1)-ixmax);
yrotate=[cos(yang) 0 -sin(yang);0 1 0;sin(yang) 0
cos(yang)];
nnv=yrotate*nv;
theta2=t2/pi*180;
theta5=(pi/2-
atan2(nnv(3),sqrt(nnv(1)*nnv(1)+nnv(2)*nnv(2))))/pi*180;
theta4=atan2(nnv(2),nnv(1))/pi*180;
theta1=theta1/pi*180;
theta=[theta1 theta2 theta3 theta4 theta5];
220
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
A-5- :نافذة إجراء الدراسة الديناميكية
global A1;
global A2;
global A3;
global A4;
global A5;
global t;
global q1;
global qd1;
global qdd1;
g=[0; 0; -9.8 ;0];
r1=[rx1;ry1;rz1;1];
r2=[rx2;ry2;rz2;1];
r3=[rx3;ry3;rz3;1];
r4=[rx4;ry4;rz4;1];
r5=[rx5;ry5;rz5;1];
J1=[(-Ixx1+Iyy1+Izz1)/2 Ixy1 Ixz1 m1 ; Ixy1 (Ixx1-
Iyy1+Izz1)/2 Iyz1 m1 ; Ixz1 Iyz1 (Ixx1+Iyy1-Izz1)/2 m1 ;
m1 m1 m1 m1];
J2=[(-Ixx2+Iyy2+Izz2)/2 Ixy2 Ixz2 m2 ; Ixy2 (Ixx2-
Iyy2+Izz2)/2 Iyz2 m2 ; Ixz2 Iyz2 (Ixx2+Iyy2-Izz2)/2 m2 ;
m2 m2 m2 m2];
J3=[(-Ixx3+Iyy3+Izz3)/2 Ixy3 Ixz3 m3 ; Ixy3 (Ixx3-
Iyy3+Izz3)/2 Iyz3 m3 ; Ixz3 Iyz3 (Ixx3+Iyy3-Izz3)/2 m3 ;
m3 m3 m3 m3];
J4=[(-Ixx4+Iyy4+Izz4)/2 Ixy4 Ixz4 m4 ; Ixy4 (Ixx4-
Iyy4+Izz4)/2 Iyz4 m4 ; Ixz4 Iyz4 (Ixx4+Iyy4-Izz4)/2 m4 ;
m4 m4 m4 m4];
J5=[(-Ixx5+Iyy5+Izz5)/2 Ixy5 Ixz5 m5 ; Ixy5 (Ixx5-
Iyy5+Izz5)/2 Iyz5 m5 ; Ixz5 Iyz5 (Ixx5+Iyy5-Izz5)/2 m5 ;
m5 m5 m5 m5];
tic
for i=1:length(t)
U11=Q*A1(:,:,i);
U21=Q*A1(:,:,i)*A2(:,:,i);
U31=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i);
U41=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U51=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i);
U22=A1(:,:,i)*Q*A2(:,:,i);
U31=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i);
U32=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i);
U33=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i);
U41=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U42=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U43=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i);
U44=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i);

221
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
U51=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i);
U52=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i);
U53=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i)*A5(:,:,i);
U54=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i)*A5(:,:,i);
U55=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*Q*A5(:,:,i);
U111=Q*Q*A1(:,:,i);
U211=Q*Q*A1(:,:,i)*A2(:,:,i);
U222=A1(:,:,i)*Q*Q*A2(:,:,i);
U311=Q*Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i);
U322=A1(:,:,i)*Q*Q*A2(:,:,i)*A3(:,:,i);
U333=A1(:,:,i)*A2(:,:,i)*Q*Q*A3(:,:,i);
U411=Q*Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U422=A1(:,:,i)*Q*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U433=A1(:,:,i)*A2(:,:,i)*Q*Q*A3(:,:,i)*A4(:,:,i);
U444=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*Q*A4(:,:,i);
U511=Q*Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U522=A1(:,:,i)*Q*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U533=A1(:,:,i)*A2(:,:,i)*Q*Q*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U544=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*Q*A4(:,:,i)*A5(:,:,i
);
U555=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*Q*Q*A5(:,:,i
);
U212=Q*A1(:,:,i)*Q*A2(:,:,i);
U312=Q*A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i);
U313=Q*A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i);
U412=Q*A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i);
U413=Q*A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i);
U414=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i);
U512=Q*A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U513=Q*A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U514=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i)*A5(:,:,i
);
U515=Q*A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*Q*A5(:,:,i
);
U323=A1(:,:,i)*Q*A2(:,:,i)*Q*A3(:,:,i);
U423=A1(:,:,i)*Q*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i);
U424=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i);
U523=A1(:,:,i)*Q*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i)*A5(:,:,i
);
U524=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i)*A5(:,:,i
);
U525=A1(:,:,i)*Q*A2(:,:,i)*A3(:,:,i)*A4(:,:,i)*Q*A5(:,:,i
);
U434=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*Q*A4(:,:,i);

222
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
U534=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*Q*A4(:,:,i)*A5(:,:,i
);
U535=A1(:,:,i)*A2(:,:,i)*Q*A3(:,:,i)*A4(:,:,i)*Q*A5(:,:,i
);
U545=A1(:,:,i)*A2(:,:,i)*A3(:,:,i)*Q*A4(:,:,i)*Q*A5(:,:,i
);
D11=trace(U11*J1*U11')+trace(U21*J2*U21')+trace(U31*J3*U3
1')+trace(U41*J4*U41')+trace(U51*J5*U51');
D12=trace(U22*J2*U21')+trace(U32*J3*U31')+trace(U42*J4*U4
1')+trace(U52*J5*U51');
D21=trace(U22*J2*U21')+trace(U32*J3*U31')+trace(U42*J4*U4
1')+trace(U52*J5*U51');
D13=trace(U33*J3*U31')+trace(U43*J4*U41')+trace(U53*J5*U5
1');
D31=trace(U33*J3*U31')+trace(U43*J4*U41')+trace(U53*J5*U5
1');
D14=trace(U44*J4*U41')+trace(U54*J5*U51');
D41=trace(U44*J4*U41')+trace(U54*J5*U51');
D15=trace(U55*J5*U51');
D51=trace(U55*J5*U51');
D22=trace(U22*J2*U22')+trace(U32*J3*U32')+trace(U42*J4*U4
2')+trace(U52*J5*U52');
D23=trace(U33*J3*U32')+trace(U43*J4*U42')+trace(U53*J5*U5
2');
D32=trace(U33*J3*U32')+trace(U43*J4*U42')+trace(U53*J5*U5
2');
D24=trace(U44*J4*U42')+trace(U54*J5*U52');
D42=trace(U44*J4*U42')+trace(U54*J5*U52');
D25=trace(U55*J5*U52');
D52=trace(U55*J5*U52');
D33=trace(U33*J3*U33')+trace(U43*J3*U43')+trace(U53*J5*U5
3');
D34=trace(U44*J4*U43')+trace(U54*J5*U53');
D43=trace(U44*J4*U43')+trace(U54*J5*U53');
D35=trace(U55*J5*U53');
D53=trace(U55*J5*U53');
D44=trace(U44*J4*U44')+trace(U54*J5*U54');
D45=trace(U55*J5*U54');
D54=trace(U55*J5*U54');
D55=trace(U55*J5*U55');
D111=trace(U111*J1*U11')+trace(U211*J1*U21')+trace(U311*J
3*U31')+trace(U411*J4*U41')+trace(U511*J5*U51');
D122=trace(U222*J2*U21')+trace(U322*J3*U31')+trace(U422*J
4*U41')+trace(U522*J5*U51');
D133=trace(U333*J3*U31')+trace(U433*J4*U41')+trace(U533*J
5*U51');
D144=trace(U444*J4*U41')+trace(U544*J5*U51');
D155=trace(U555*J5*U51');

223
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
D211=trace(U211*J2*U22')+trace(U311*J3*U32')+trace(U411*J
4*U42')+trace(U511*J5*U52');
D222=trace(U222*J2*U22')+trace(U322*J3*U32')+trace(U422*J
4*U42')+trace(U522*J5*U52');
D233=trace(U333*J3*U32')+trace(U433*J4*U42')+trace(U533*J
5*U52');
D244=trace(U444*J4*U42')+trace(U544*J5*U52');
D255=trace(U555*J5*U52');
D311=trace(U311*J3*U33')+trace(U411*J4*U43')+trace(U511*J
5*U53');
D322=trace(U322*J3*U33')+trace(U422*J4*U43')+trace(U522*J
5*U53');
D333=trace(U333*J3*U33')+trace(U433*J4*U43')+trace(U533*J
5*U53');
D344=trace(U444*J4*U43')+trace(U544*J5*U53');
D355=trace(U555*J5*U53');
D411=trace(U411*J4*U44')+trace(U511*J5*U54');
D422=trace(U422*J4*U44')+trace(U522*J5*U54');
D433=trace(U433*J4*U44')+trace(U533*J5*U54');
D444=trace(U444*J4*U44')+trace(U544*J5*U54');
D455=trace(U555*J5*U54');
D511=trace(U511*J5*U55');
D522=trace(U522*J5*U55');
D533=trace(U533*J5*U55');
D544=trace(U544*J5*U55');
D555=trace(U555*J5*U55');
D112=trace(U212*J2*U21')+trace(U312*J3*U31')+trace(U412*J
4*U41')+trace(U512*J5*U51');
D113=trace(U313*J3*U31')+trace(U413*J4*U41')+trace(U513*J
5*U51');
D114=trace(U414*J4*U41')+trace(U514*J5*U51');
D115=trace(U515*J5*U51');
D123=trace(U323*J3*U31')+trace(U423*J4*U41')+trace(U523*J
5*U51');
D124=trace(U424*J4*U41')+trace(U524*J5*U51');
D125=trace(U525*J5*U51');
D134=trace(U434*J4*U41')+trace(U534*J5*U51');
D135=trace(U535*J5*U51');
D145=trace(U545*J5*U51');
D212=trace(U212*J2*U22')+trace(U312*J3*U32')+trace(U412*J
4*U42')+trace(U512*J5*U52');
D213=trace(U313*J3*U32')+trace(U413*J4*U42')+trace(U513*J
5*U52');
D214=trace(U414*J4*U42')+trace(U514*J5*U52');
D215=trace(U515*J5*U52');
D223=trace(U323*J3*U32')+trace(U423*J4*U42')+trace(U523*J
5*U52');
D224=trace(U424*J4*U42')+trace(U524*J5*U52');
D225=trace(U525*J5*U52');
D234=trace(U434*J4*U42')+trace(U534*J5*U52');
224
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
D235=trace(U535*J5*U52');
D245=trace(U545*J5*U52');
D312=trace(U312*J3*U33')+trace(U412*J4*U43')+trace(U512*J
5*U53');
D313=trace(U313*J3*U33')+trace(U413*J4*U43')+trace(U513*J
5*U53');
D314=trace(U414*J4*U43')+trace(U514*J5*U53');
D315=trace(U515*J5*U53');
D323=trace(U323*J3*U33')+trace(U423*J4*U43')+trace(U523*J
5*U53');
D324=trace(U424*J4*U43')+trace(U524*J5*U53');
D325=trace(U525*J5*U53');
D334=trace(U434*J4*U43')+trace(U534*J5*U53');
D335=trace(U535*J5*U53');
D345=trace(U545*J5*U53');
D412=trace(U412*J4*U44')+trace(U512*J5*U54');
D413=trace(U413*J4*U44')+trace(U513*J5*U54');
D414=trace(U414*J4*U44')+trace(U514*J5*U54');
D415=trace(U515*J5*U54');
D423=trace(U423*J4*U44')+trace(U523*J5*U54');
D424=trace(U424*J4*U44')+trace(U524*J5*U54');
D425=trace(U525*J5*U54');
D434=trace(U434*J4*U44')+trace(U534*J5*U54');
D435=trace(U535*J5*U54');
D445=trace(U545*J5*U54');
D512=trace(U512*J5*U55');
D513=trace(U513*J5*U55');
D514=trace(U514*J5*U55');
D515=trace(U515*J5*U55');
D523=trace(U523*J5*U55');
D524=trace(U524*J5*U55');
D525=trace(U525*J5*U55');
D534=trace(U534*J5*U55');
D535=trace(U535*J5*U55');
D545=trace(U545*J5*U55');
D1=-m1*g'*U11*r1-m2*g'*U21*r2-m3*g'*U31*r3-m4*g'*U41*r4-
m5*g'*U51*r5;
D2=-m2*g'*U22*r2-m3*g'*U32*r3-m4*g'*U42*r4-m5*g'*U52*r5;
D3=-m3*g'*U33*r3-m4*g'*U43*r4-m5*g'*U53*r5;
D4=-m4*g'*U44*r4-m5*g'*U54*r5;
D5=-m5*g'*U55*r5;
Dij=[D11 D12 D13 D14 D15;D21 D22 D23 D24 D25; D31 D32 D33
D34 D35;D41 D42 D43 D44 D45;D51 D52 D53 D54 D55];
Dijj=[D111 D122 D133 D144 D155;D211 D222 D233 D244
D255;D311 D322 D333 D344 D355;D411 D422 D433 D444
D455;D511 D522 D533 D544 D555];
Dijk=[D112 D113 D114 D115 D123 D124 D125 D134 D135
D145;D212 D213 D214 D215 D223 D224 D225 D234 D235
D245;D312 D313 D314 D315 D323 D324 D325 D334 D335
225
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
D345;D412 D413 D414 D415 D423 D424 D425 D434 D435
D445;D512 D513 D514 D515 D523 D524 D525 D534 D535 D545];
Di=[D1 ; D2 ; D3 ; D4 ; D5];
temp=[qd1(1,i)* qd1(2,i); qd1(1,i)* qd1(3,i); qd1(1,i)*
qd1(4,i); qd1(1,i)* qd1(5,i); qd1(2,i)* qd1(3,i);...
qd1(2,i)* qd1(4,i); qd1(2,i)* qd1(5,i); qd1(3,i)*
qd1(4,i); qd1(3,i)* qd1(5,i); qd1(4,i)* qd1(5,i) ];
T(:,i)=(Dij*qdd1(:,i))+(Dijj*qd1(:,i).^2)+Di+(2*Dijk*temp
);
End
delete(gca)
set(handles.uipanel11,'visible','on')
subplot(5,1,1,'Parent',handles.uipanel11)
plot(t,T(1,:));
title('torque')
xlabel('Time (s)');
ylabel('Joint 1 (N/m)')
subplot(5,1,2,'Parent',handles.uipanel11)
plot(t,T(2,:));
xlabel('Time (s)');
ylabel('Joint 2 (N/m)')
subplot(5,1,3,'Parent',handles.uipanel11)
plot(t,T(3,:));
xlabel('Time (s)');
ylabel('Joint 3 (N/m)')
subplot(5,1,4,'Parent',handles.uipanel11)
plot(t,T(4,:));
xlabel('Time (s)');
ylabel('Joint 4 (N/m)')
subplot(5,1,5,'Parent',handles.uipanel11)
plot(t,T(5,:));
xlabel('Time (s)');
ylabel('Joint 5 (N/m)')
toc
A-6- :نافذة إجراء الدراسة الديناميكية باالستعانة بمكتبات الروبوت الجاهزة
global q;
global qd;
global qdd;
global t;
L{1} = link([ pi/2 0 0 0.435 0], 'standard');
L{2} = link([ 0 0.25 0 0 0], 'standard');
L{3} = link([pi/2 0 0 0 0], 'standard');
L{4} = link([-pi/2 0 0 0.245 0], 'standard');
L{5} = link([0 0.16 0 0 0], 'standard');
226
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
L{1}.m = 6.32;
L{2}.m = 5.67;
L{3}.m = 1.29;
L{4}.m = 0.91;
L{5}.m =0.1;
L{1}.r = [ -0.05 -0.03 0.41 ];
L{2}.r = [ 0 -0.02 0.48];
L{3}.r = [ 0.32 0.05 0.45];
L{4}.r = [ 0.44 0.06 0.42];
L{5}.r = [ 0.57 0 0.44];
L{1}.I = [ 1.08 1.1 0.06 0 0 0];
L{2}.I = [ 1.35 1.41 0.09 0 0 0];
L{3}.I = [ 0.27 0.4 0.14 0 0 0];
L{4}.I = [ 0.17 0.37 0.2 0 0 0];
L{5}.I = [ 0.02 0.05 0.03 0 0 0];
global weld
weld = robot(L, 'weld', 'Unimation', 'params of 8/95');
clear L
weld.name = 'weld';
weld.manuf = 'Unimation';
tic
tau = rne(weld, q, qd, qdd);
toc
taug = gravload(weld, q);
delete(gca)
set(handles.uipanel1,'visible','on')
subplot(5,1,1,'Parent',handles.uipanel1)
plot(t,tau(:,1))
title('Torque')
xlabel('Time (s)');
ylabel('j1 (Nm)')
subplot(5,1,2)
plot(t,tau(:,2))
xlabel('Time (s)');
ylabel('j2 (Nm)')
subplot(5,1,3)
plot(t,tau(:,3) )
xlabel('Time (s)');
ylabel('j3 (Nm)')
subplot(5,1,4)
plot(t,tau(:,4) )
xlabel('Time (s)');
ylabel('j4 (Nm)')
subplot(5,1,5)
plot(t,tau(:,5))
xlabel('Time (s)');
ylabel('j5 (Nm)')
227
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
A-7- تحديد مسار اللحامنافذة:
global obj;
obj=videoinput('winvideo',1,'YUY2_640x480');
set(obj,'framesperTrigger',10,'TriggerRepeat',Inf);
obj.returnedcolorspace='grayscale';
if ~isrunning(obj);
start(obj);
end
pause(0.5);
start(handles.timer1);
global inspic;
pic=inspic;
imshow(pic);
load ('sliders1.mat','maxy');
set(handles.slider1,'value',maxy);
global inspic;
global y1;
global x1;
maxy=get(handles.slider1,'value');
pic=inspic;
bw=im2bw(pic,maxy/255);
bw1=bwmorph(bw,'close',100);
bw2=imfill(bw1,'holes');
bw4=bwareaopen(bw2,50);
bw5=bwmorph(bw4,'dilate',3);
bw6=bwmorph(bw5,'thin',Inf);
p=1;
clear x;
clear y;
for i=1:480
for j=1:640
if bw6(i,j)==1;
x(p)=j;
y(p)=i;
p=p+1;
end
end
end
x1=x(1);
y1=1;
for i=1:p-1
if (x(i)>=x1)
x1=x(i);
end
228
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
end
imshow(pic);
costline(x1,y1);
set(handles.text2,'string',round(340/805*(480/2-
y1)*10)/10);
global y1;
global y2;
global x1;
global x2;
pic=zeros(480,640);
line([x1+((640/2)-70*805/340) x1],[y1 y2],'LineStyle','-
','LineWidth',3,'Color','b');
m=-1*(y2-y1)/(70*805/340);
x0=y2-m*x2;
y3=m*(1)+x0;
y4=m*(640)+x0;
y1=round(340/805*(480/2-y1)*10)/10;
y2=round(340/805*(480/2-y2)*10)/10;
t=atan((y2-y1)/170)/pi*180;
set(handles.text6,'string',-t);
A-8- تحديد دليل المسار بالليزرنافذة:
global obj;
global inspic;
obj=videoinput('winvideo',1,'YUY2_640x480');
set(obj,'framesperTrigger',30,'TriggerRepeat',Inf);
if ~isrunning(obj);
start(obj);
end
pause(0.5);
start(handles.timer1);
global inspic;
pic=inspic;
imshow(pic);
load ('sliders1.mat','maxy');
set(handles.slider1,'value',maxy);
global inspic;
global firstenter;
maxy=get(handles.slider1,'value');
pic=inspic;
firstenter=true;
start(handles.timer);
pause(0.1);
229
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
p=1;
global obj;
global pic;
global p;
global X;
global Y;
global firstenter;
global inspic;
handles = guidata(hfigure);
if firstenter
imshow(ycbcr2rgb(inspic));
firstenter=false;
end
pic1=zeros(480,640);
for j=1:480
for i=1:640
if ((inspic(j,i,1)<=maxy)&&(inspic(j,i,1)>=miny))
pic1(j,i)=1;
end
end
end
pic1=bwmorph(pic1,'erode',1);
pic1=bwareaopen(pic1,50);
pic1=bwmorph(pic1,'close',5);
pic1=bwfill(pic1,'holes');
[pic1,num]=bwlabel(pic1);
if num==1
stats = regionprops(pic1, 'Centroid');
x=round(stats(1,1).Centroid(1,2));
y=round(stats(1,1).Centroid(1,1));
X(p)=x;
Y(p)=y;
if p>1
line([Y(p-1) Y(p)],[X(p-1) X(p)],'LineStyle','-
','LineWidth',4,'Color','w');
end
p=p+1;
end
stop(handles.timer);
pause(0.1);

230
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
A-9- تحديد دليل المسار بالطباشيرنافذة:
global obj;
obj=videoinput('winvideo',1,'YUY2_640x480');
set(obj,'framesperTrigger',30,'TriggerRepeat',Inf);
if ~isrunning(obj);
start(obj);
end
pause(0.5);
start(handles.timer1);
global inspic;
pic=inspic;
imshow(pic);
load ('sliders1.mat','maxy');
set(handles.slider1,'value',maxy);
global inspic;
pic1=zeros(480,640);
maxy=get(handles.slider1,'value');
pic=inspic;
p=1;
for j=1:480
for i=1:640
pic1(j,i)=1;
end
end
bw=im2bw(pic1,0.95);
bw1=bwmorph(bw,'close',100);
bw2=imfill(bw1,'holes');
bw3=bwmorph(bw2,'open',100);
bw4=bwareaopen(bw3,300);
bw5=bwmorph(bw4,'dilate',6);
bw6=bwmorph(bw5,'thin',Inf);
for i=1:640
for j=1:480
if bw6(j,i)==1;
x(p)=i;
y(p)=j;
p=p+1;
end
end
end
imshow(ycbcr2rgb(pic));
line(x,y,'LineStyle','-','LineWidth',3,'Color','r');
clear x
clear y
A-10- حساب المسافةنافذة:
global obj;
231
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
obj=videoinput('winvideo', 1, 'YUY2_640x480');
set(obj,'framesperTrigger',10,'TriggerRepeat',Inf);
obj.returnedcolorspace='grayscale';
if ~isrunning(obj);
start(obj);
end
pause(0.5);
start(handles.timer1);
global inspic;
pic=inspic;
imshow(pic);
load ('sliders4.mat','maxy');
set(handles.slider1,'value',maxy);
global inspic;
maxy=get(handles.slider1,'value');
pic=inspic;
for i=1:20
pic1(i,:)=pic(i+480/2-10,:);
end
bw=im2bw(pic1,maxy/255);
bw1=bwmorph(bw,'close',100);
bw2=imfill(bw1,'holes');
bw4=bwareaopen(bw2,50);
bw5=bwmorph(bw4,'dilate',3);
p=0;
for i=1:640
if bw5(10,i)==1
p=p+1;
x(p)=i;
end
end
if p>0
position=mean(x);
theta=atan((640/2-position)/805);
distance=60/tan(theta);
set(handles.text6,'string',distance);
end
imshow(bw5);
A-11- تحديد انحراف المشغولةنافذة:
global obj;
global inspic;
global stopnow;
stopnow=false;
obj=videoinput('winvideo',1,'YUY2_640x480');
set(obj,'framesperTrigger',10,'TriggerRepeat',Inf);
start(obj);
pause(0.5);
232
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
while 1==1
inspic= getdata(obj,1);
flushdata(obj);
pause(0.1);
if stopnow
break;
end
end
global inspic;
global pic;
pic=inspic;
pic1=ycbcr2rgb(pic);
imshow(pic1);
load ('sliders5.mat','maxy','miny','maxcr','mincr');
set(handles.slider1,'value',maxy);
set(handles.slider2,'value',miny);
set(handles.slider5,'value',maxcr);
set(handles.slider6,'value',mincr);
global maxy;
global miny;
global maxcr;
global mincr;
global inspic;
global d1;
global d2;
global x;
global y;
global theta;
global m;
global morigin;
global xorigin;
global yorigin;
global torigin;
global d1origin;
global d2origin;
global firstrun;
pic=inspic;
pic1=zeros(480,640);
for j=1:480
for i=1:640
if ((pic(j,i,1)<=maxy)&&(pic(j,i,1)>=miny))&&...
((pic(j,i,3)<=maxcr)&&(pic(j,i,3)>=mincr))
pic1(j,i)=1;
end
end
end
pic1=~pic1;
233
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
bw=bwmorph(pic1,'close',10);
bw=imfill(bw,'holes');
bw=bwmorph(bw,'open',10);
bw=bwareaopen(bw,300);
[bw1, num] = bwlabel(bw);
pic=ycbcr2rgb(pic);
imshow(pic);
if num==1
stats = regionprops(bw1, 'Orientation');
theta=stats(1,1).Orientation/180*pi;
stats=regionprops(bw1, 'MajorAxisLength');
d1=stats(1,1).MajorAxisLength*0.9;
stats=regionprops(bw1, 'MinorAxisLength');
d2=stats(1,1).MinorAxisLength*0.9;
stats=regionprops(bw1, 'Centroid');
m=stats(1,1).Centroid;
ax=m(1)+d1/2*cos(theta);
ay=m(2)-d1/2*sin(theta);
bx=ax-d2/2*cos(pi-pi/2-theta);
by=ay-d2/2*sin(pi-pi/2-theta);
hx=ax+d2/2*cos(pi-pi/2-theta);
hy=ay+d2/2*sin(pi-pi/2-theta);
ex=m(1)-d1/2*cos(theta);
ey=m(2)+d1/2*sin(theta);
dx=ex-d2/2*cos(pi-pi/2-theta);
dy=ey-d2/2*sin(pi-pi/2-theta);
fx=ex+d2/2*cos(pi-pi/2-theta);
fy=ey+d2/2*sin(pi-pi/2-theta);
line([bx dx fx hx bx],[by dy fy hy by],'LineStyle','-
','LineWidth',3,'Color','r');
if ~firstrun
ax=morigin(1)+d1origin/2*cos(torigin);
ay=morigin(2)-d1origin/2*sin(torigin);
bx=ax-d2origin/2*cos(pi-pi/2-torigin);
by=ay-d2origin/2*sin(pi-pi/2-torigin);
hx=ax+d2origin/2*cos(pi-pi/2-torigin);
hy=ay+d2origin/2*sin(pi-pi/2-torigin);
ex=morigin(1)-d1origin/2*cos(torigin);
ey=morigin(2)+d1origin/2*sin(torigin);
dx=ex-d2origin/2*cos(pi-pi/2-torigin);
dy=ey-d2origin/2*sin(pi-pi/2-torigin);
fx=ex+d2origin/2*cos(pi-pi/2-torigin);
fy=ey+d2origin/2*sin(pi-pi/2-torigin);
line([bx dx fx hx bx],[by dy fy hy by],'LineStyle','-
','LineWidth',3,'Color','g');
end
x=320/805*(640/2-m(1));
y=320/805*(480/2-m(2));
if ~firstrun
set(handles.text1,'string',round((theta-
torigin)*180/pi*10)/10);
234
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
set(handles.text2,'string',round(-(x-xorigin)));
set(handles.text3,'string',round(y-yorigin));
end
end
global m;
global x;
global y;
global theta;
global morigin;
global xorigin;
global yorigin;
global torigin;
global d1;
global d2;
global d1origin;
global d2origin;
global firstrun;
global inspic;
firstrun=false;
d1origin=d1;
d2origin=d2;
morigin=m;
xorigin=x;
yorigin=y;
imshow(ycbcr2rgb(inspic));
torigin=theta;
set(handles.text4,'string',round(theta*180/pi*10)/10);
set(handles.text5,'string',round(-x));
set(handles.text6,'string',round(y));
ax=m(1)+d1/2*cos(theta);
ay=m(2)-d1/2*sin(theta);
bx=ax-d2/2*cos(pi-pi/2-theta);
by=ay-d2/2*sin(pi-pi/2-theta);
hx=ax+d2/2*cos(pi-pi/2-theta);
hy=ay+d2/2*sin(pi-pi/2-theta);
ex=m(1)-d1/2*cos(theta);
ey=m(2)+d1/2*sin(theta);
dx=ex-d2/2*cos(pi-pi/2-theta);
dy=ey-d2/2*sin(pi-pi/2-theta);
fx=ex+d2/2*cos(pi-pi/2-theta);
fy=ey+d2/2*sin(pi-pi/2-theta);
line([bx dx fx hx bx],[by dy fy hy by],'LineStyle','-
','LineWidth',3,'Color','g');

235
ــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ جامعة حلب -ت اللحام لروبوت صناعيتصميم وتنفيذ أنظمة تحكم ذكية لتحديد مسارا -محمـد طير. م
(B) الملحق
مخططات ميكانيكية

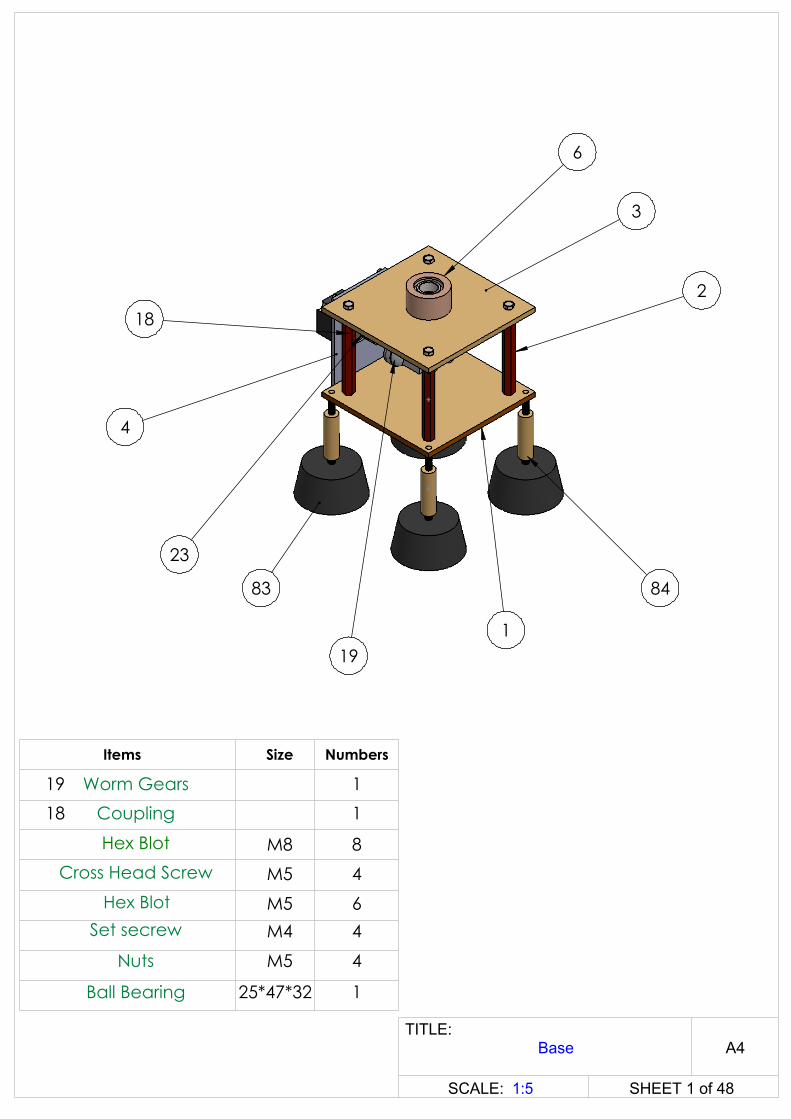
6
3
2
1
84
19
4
18
83
23
A4
1:5
TITLE:Base
SCALE: SHEET 1 of 48
Items Numbers
Hex BlotCross Head Screw
Set secrew
Nuts
Ball Bearing
Size
M8 8M5 4
Hex Blot M5 6M4 4
1
M5 4
4
25*47*32
Worm GearsCoupling 1
11918
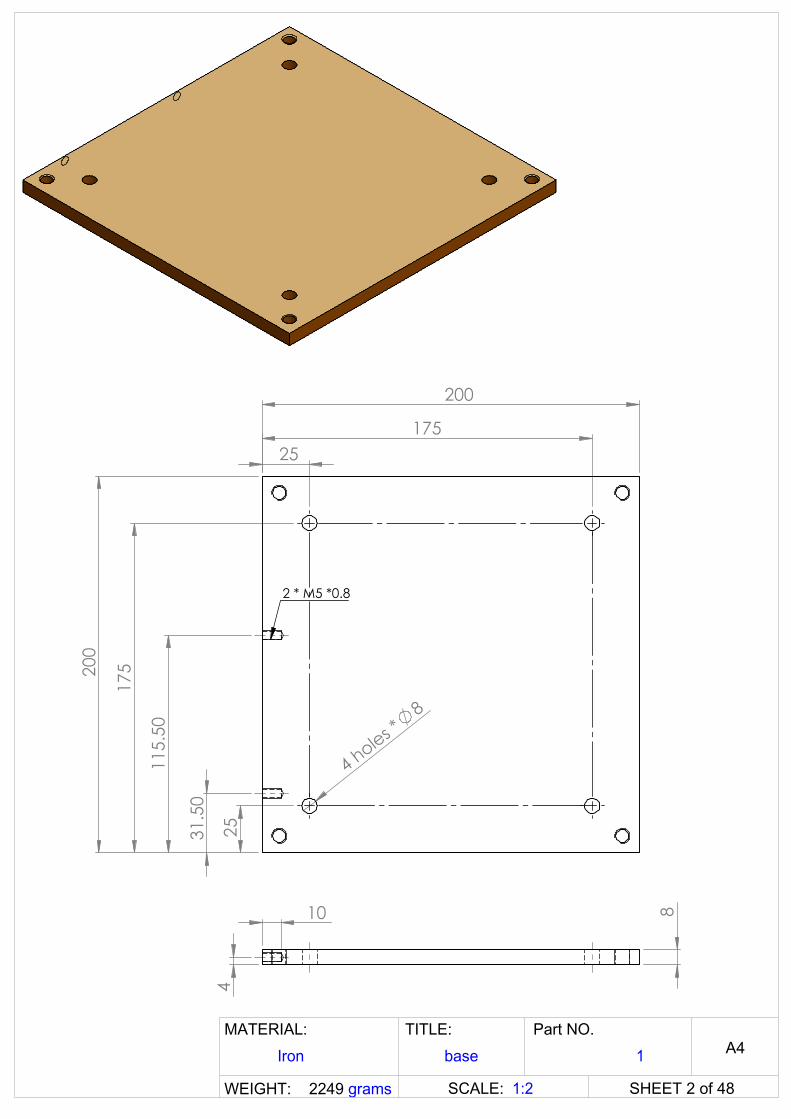
200
200
175
25
25 175
115
.50
31.
50
4 holes *8
2 * M5 *0.8
8 10
4
A4
1:2
Part NO.TITLE:MATERIAL:
2249 gramsWEIGHT:
Iron base 1
SCALE: SHEET 2 of 48

scale 1:1
130
17.32
10
10
8.66
2 * M8x1.0
15 7
.50
A4
2:1
Part NO.TITLE:MATERIAL:
174 gramsWEIGHT:
Iron base 2
SCALE: SHEET 3 of 48

8 10
4
200
200
25
100
126
.75
175
53.50
40
120°
25 175
3 holes * 5
4 holes * 8
31.
50
115
.50
2 * M5x0.8
A4
1:2
Part NO.TITLE:MATERIAL:
2183 gramsWEIGHT:
Iron base 3
SCALE: SHEET 4 of 48
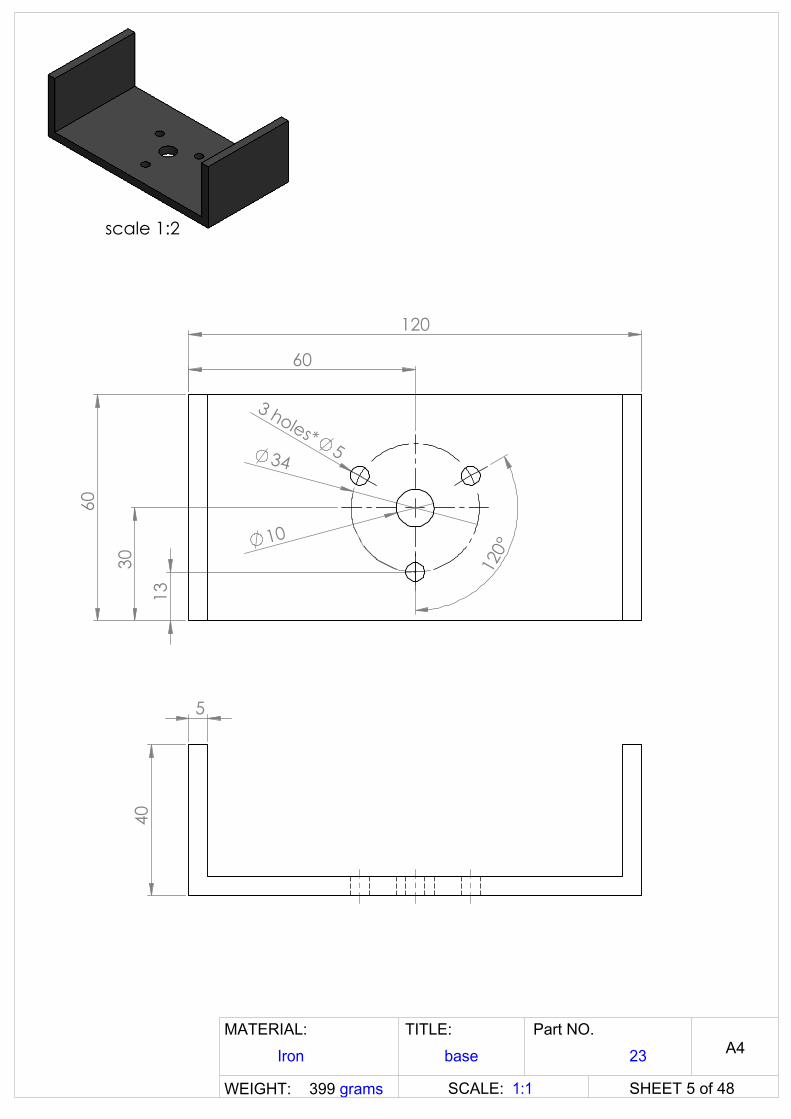
5
40
60
34
10
30
13
120
°
120
60
3 holes*5
scale 1:2
A4
1:1
Part NO.TITLE:MATERIAL:
399 gramsWEIGHT:
Iron base 23
SCALE: SHEET 5 of 48

5
146
100
38
8
50
4
92
73
26.50
49.
50
96.
50
142
73.50
4 holes * 5
4 ho
les *
5
scale 1:2
A4
1:1
Part NO.TITLE:MATERIAL:
472 gramsWEIGHT:
Aluminium base 4
SCALE: SHEET 6 of 48
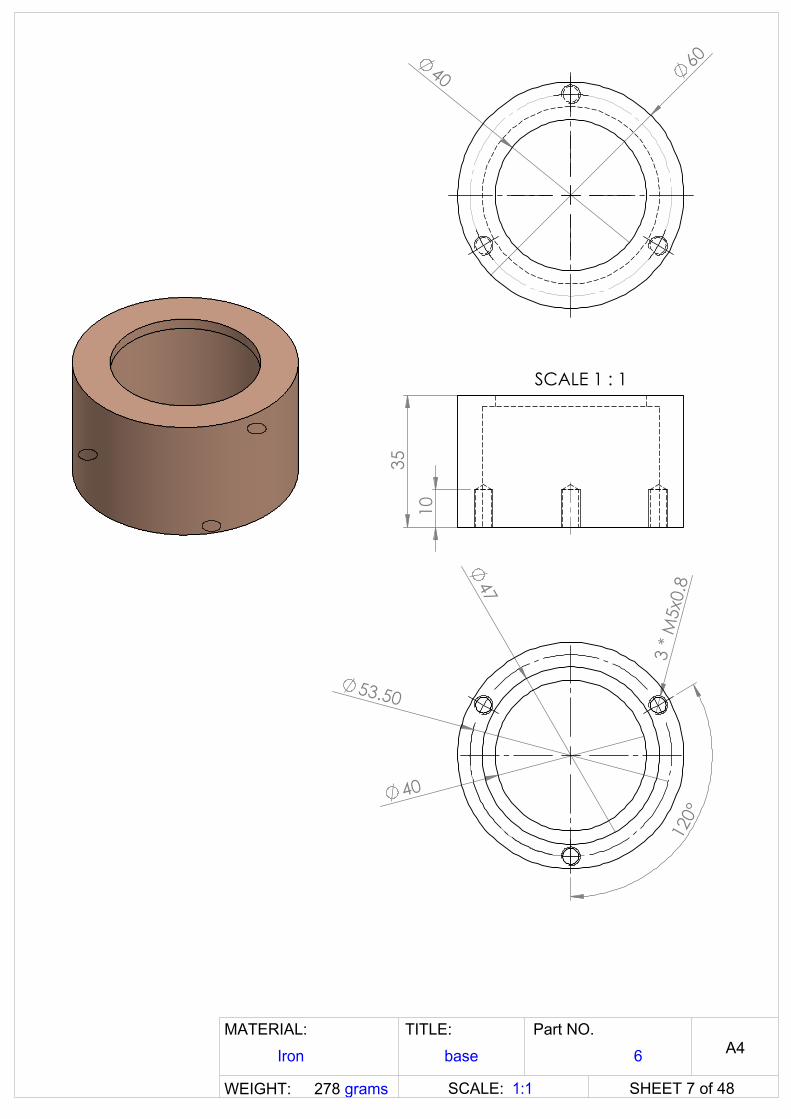
35
10
53.50
3 *
M5x
0.8
40
47
120
°
60
40
SCALE 1 : 1
A4
1:1
Part NO.TITLE:MATERIAL:
278 gramsWEIGHT:
Iron base 6
SCALE: SHEET 7 of 48

105
70
M10x1.0
20
A4
2:1
Part NO.TITLE:MATERIAL:
162 gramsWEIGHT:
Iron base 84
SCALE: SHEET 8 of 48

100
75
50
80
M 10
*1
Scale 1:2
Scale 1:2
A4
1:1
Part NO.TITLE:MATERIAL:
374 gramsWEIGHT:
Rubber+iron base 83
SCALE: SHEET 9 of 48

2315
14
12
17
98
10
1619
11
A4
1:2
DWG NO.WEIGHT:6212 grams Arm 1
SCALE: SHEET 10 of 48
2319 1
1CouplingWorm Gears
42*20*20
6M10
2
10M43M5Hex Blot4M56M10
Size
Ball Bearing
Nuts
Set secrew
Cross Head ScrewHex Blot
NumbersItems

200
8
160
110
55
7.50 102.50
2 holes *10
A4
1:2
Part NO.TITLE:MATERIAL:
1496 gramsWEIGHT:
Iron Arm 1 10
SCALE: SHEET 11 of 48
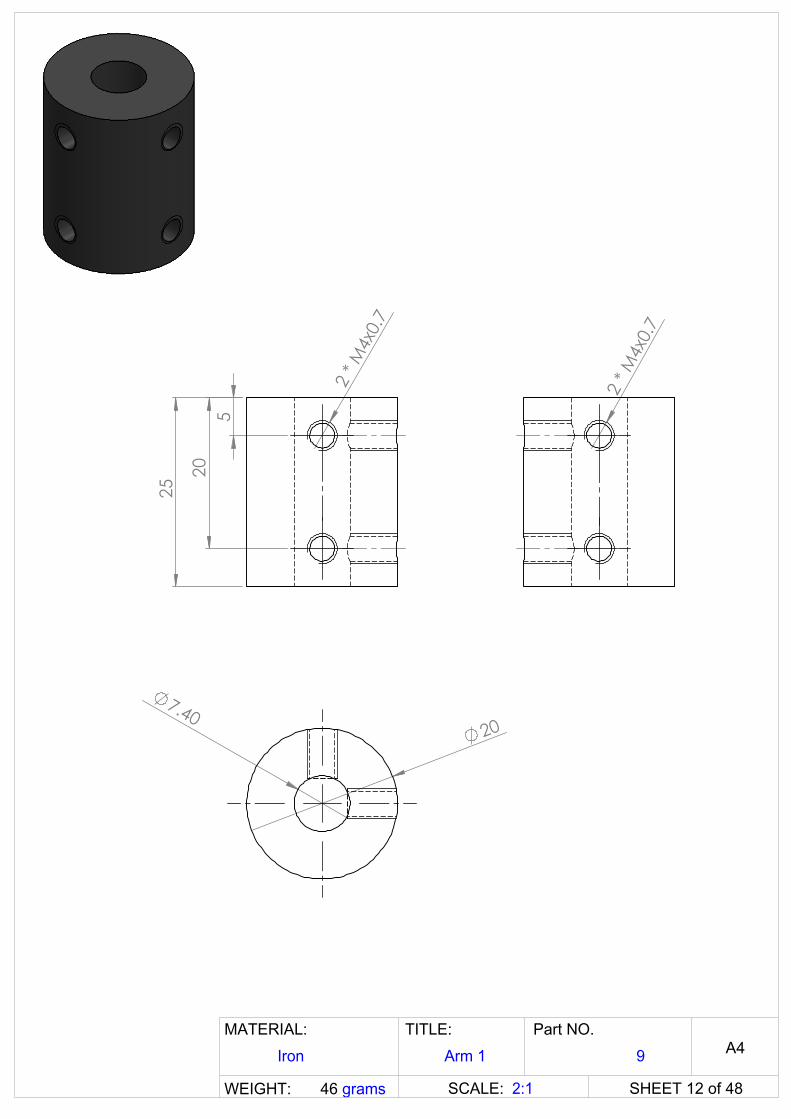
2 *
M4x
0.7
25
5
20
7.40
20
2 *
M4x
0.7
A4
2:1
Part NO.TITLE:MATERIAL:
46 gramsWEIGHT:
Iron Arm 1 9
SCALE: SHEET 12 of 48

2 * M4x0.7
4
10
170
7.40
A4
1:1
Part NO.TITLE:MATERIAL:
375 gramsWEIGHT:
Iron Arm 1 17
SCALE: SHEET 13 of 48

86
8.50
77.50
2 holes * 10
23.
50 4
5 40
5
A4
1:1
Part NO.TITLE:MATERIAL:
471 gramsWEIGHT:
Iron Arm 1 11
SCALE: SHEET 14 of 48
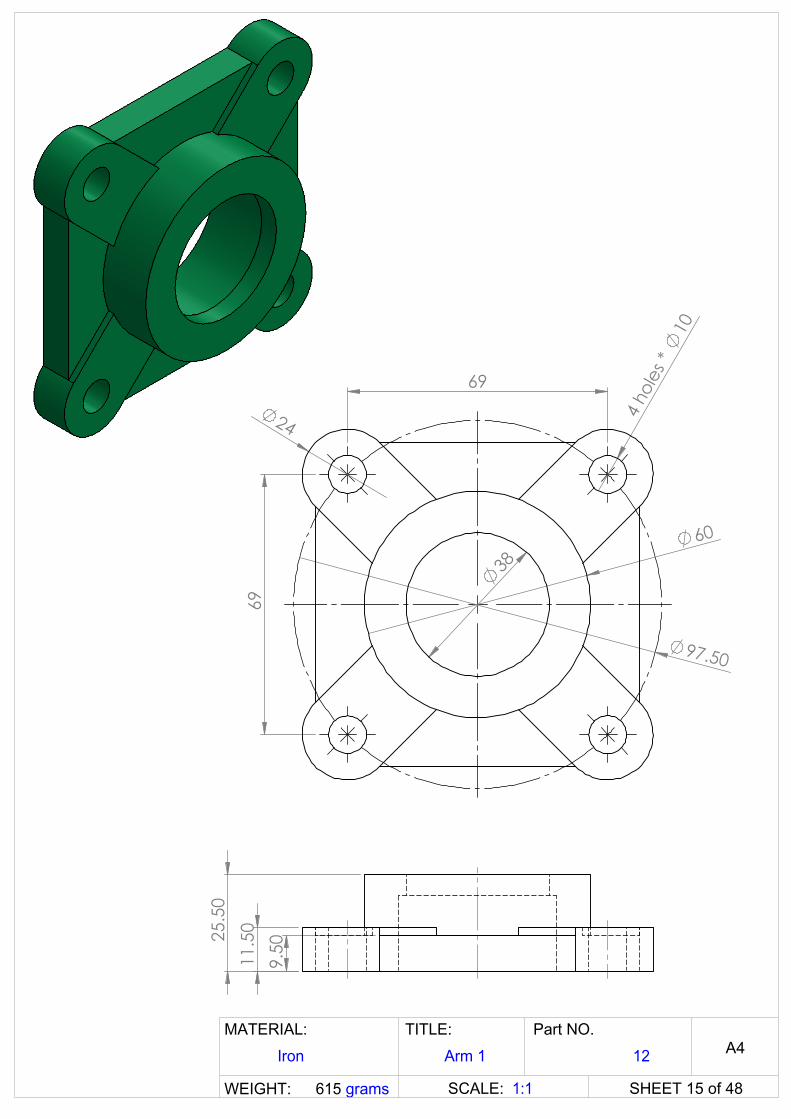
38
60
97.50
69
69
24
4 h
oles
* 10
25.
50
9.5
0 1
1.50
A4
1:1
Part NO.TITLE:MATERIAL:
615 gramsWEIGHT:
Iron Arm 1 12
SCALE: SHEET 15 of 48

5 60
103
59.
50
10
34
120
°
13
3 holes * 5
A4
1:1
Part NO.TITLE:MATERIAL:
214 gramsWEIGHT:
Aluminium Arm 1 16
SCALE: SHEET 16 of 48

3
3
35
35
110
A4
1:1
Part NO.TITLE:MATERIAL:
157 gramsWEIGHT:
Iron Arm 1 14
SCALE: SHEET 17 of 48

5
110
40
80
50 2
6.50
73.
50
4 * M
5x0.8
16.50 40
63.50
A4
1:1
Part NO.TITLE:MATERIAL:
265 gramsWEIGHT:
Aluminium Arm 1 15
SCALE: SHEET 18 of 48
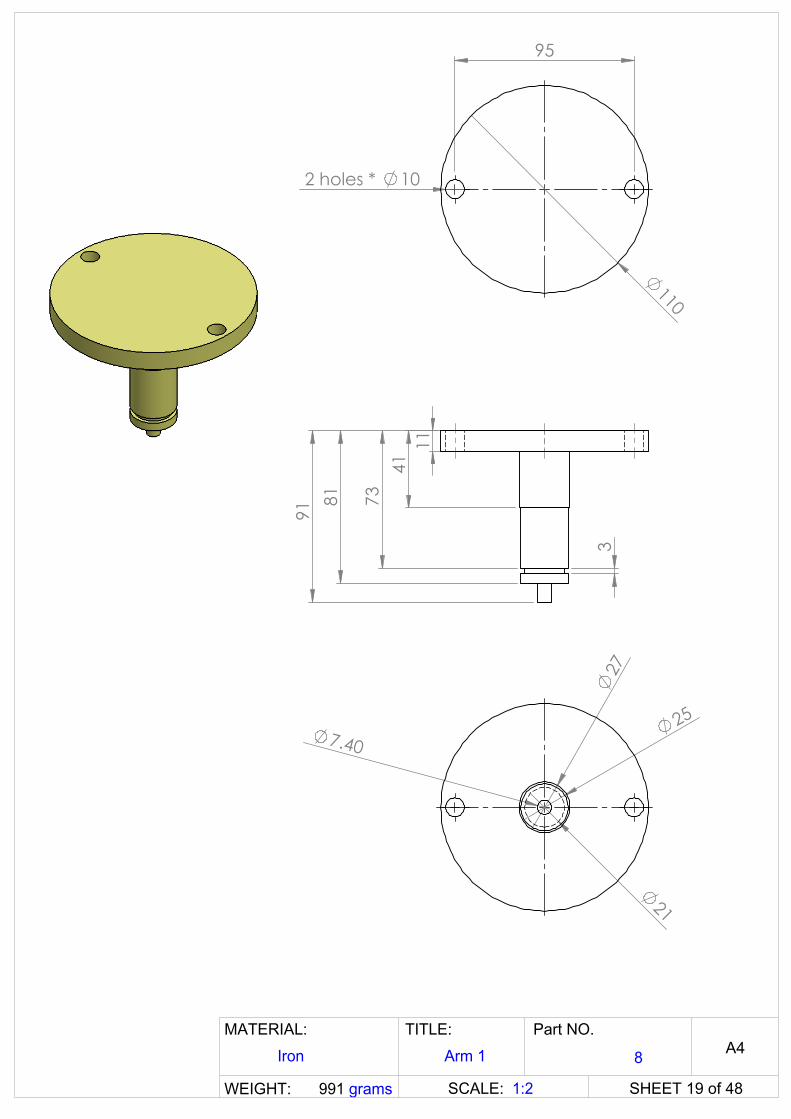
11
41
81
91 7
3
3
7.40
27
21
25
110
2 holes * 10
95
A4
1:2
Part NO.TITLE:MATERIAL:
991 gramsWEIGHT:
Iron Arm 1 8
SCALE: SHEET 19 of 48
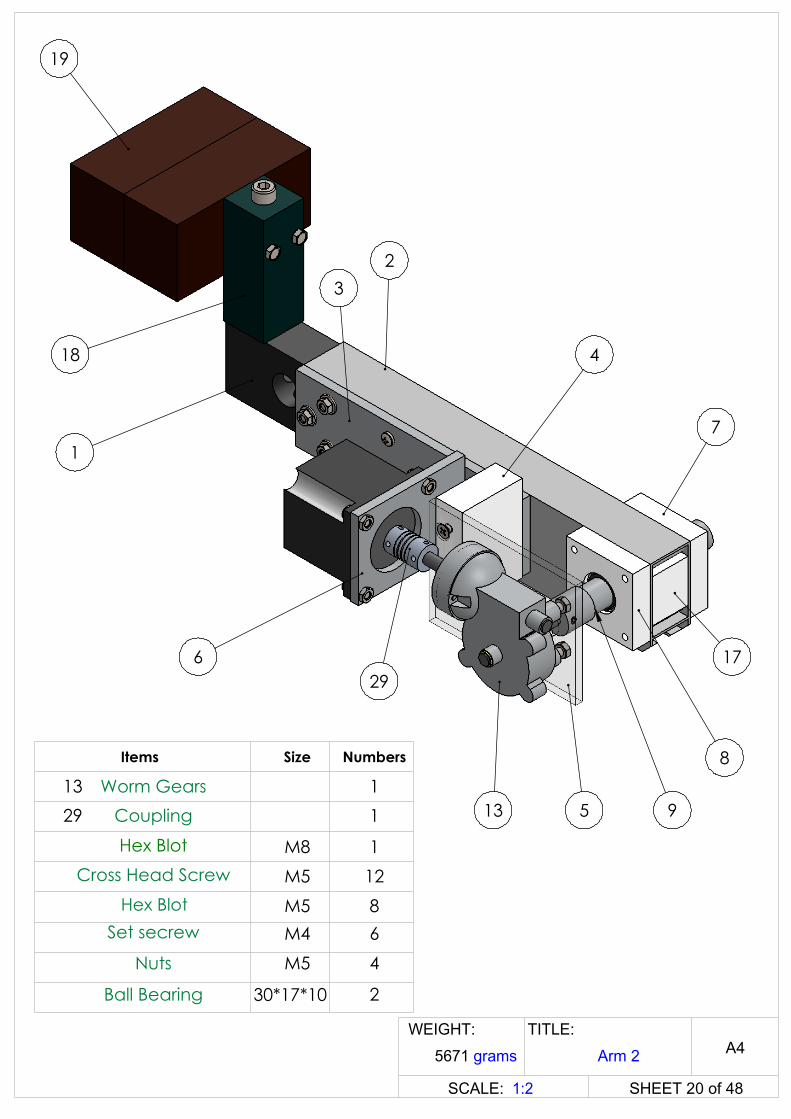
19
18
95
29
1
4
13
2
7
17
8
6
3
A4
1:2
TITLE:5671 grams
WEIGHT:Arm 2
SCALE: SHEET 20 of 48
Items Numbers
Hex BlotCross Head Screw
Set secrew
Nuts
Ball Bearing
Size
M8 1M5 12
Hex Blot M5 8M4 6
2
M5 4
30*17*10
Worm GearsCoupling 1
11329

260
10 2
5
70
120
30
216
235
254
50 60
25 10
40
6
44 54
60
25
20
10 3
hol
es*
5
4
4
4 holes*4
10
30
27
A4
1:2
Part NO.TITLE:MATERIAL:
192 gramsWEIGHT:
Aluminium Arm 2 2
SCALE: SHEET 21 of 48
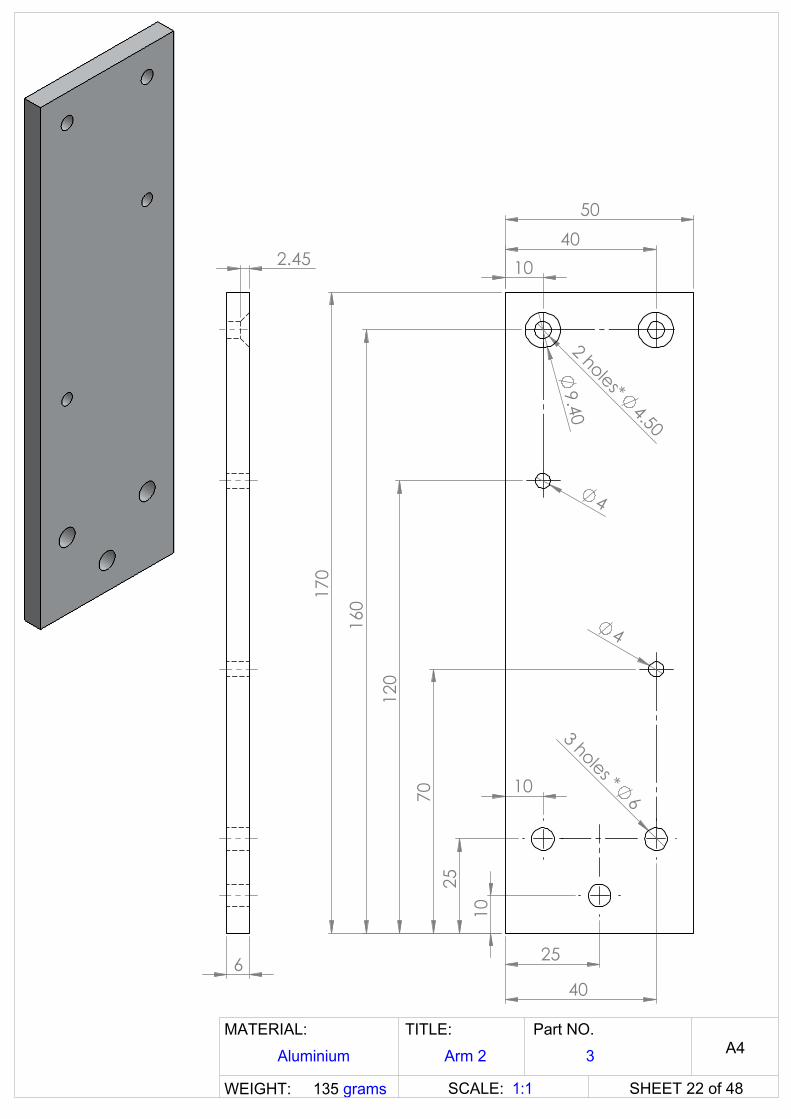
170
10
25
70
120
160
50 40
25
40
10
3 holes *6
4
4
2 holes*4.50
9.40
10 2.45
6
A4
1:1
Part NO.TITLE:MATERIAL:
135 gramsWEIGHT:
Aluminium Arm 2 3
SCALE: SHEET 22 of 48

40
10
50
28
100
40
60
2 * M6x1.0
A4
1:1
Part NO.TITLE:MATERIAL:
1417 gramsWEIGHT:
Iron Arm2 19
SCALE: SHEET 23 of 48

80
22
2 holes *
5
30
15
30
15
8
A4
1:1
Part NO.TITLE:MATERIAL:
474 gramsWEIGHT:
Iron Arm 2 18
SCALE: SHEET 24 of 48

16
32
27
A4
2:1
Part NO.TITLE:MATERIAL:
13 gramsWEIGHT:
Plastic Arm 2 17
SCALE: SHEET 25 of 48
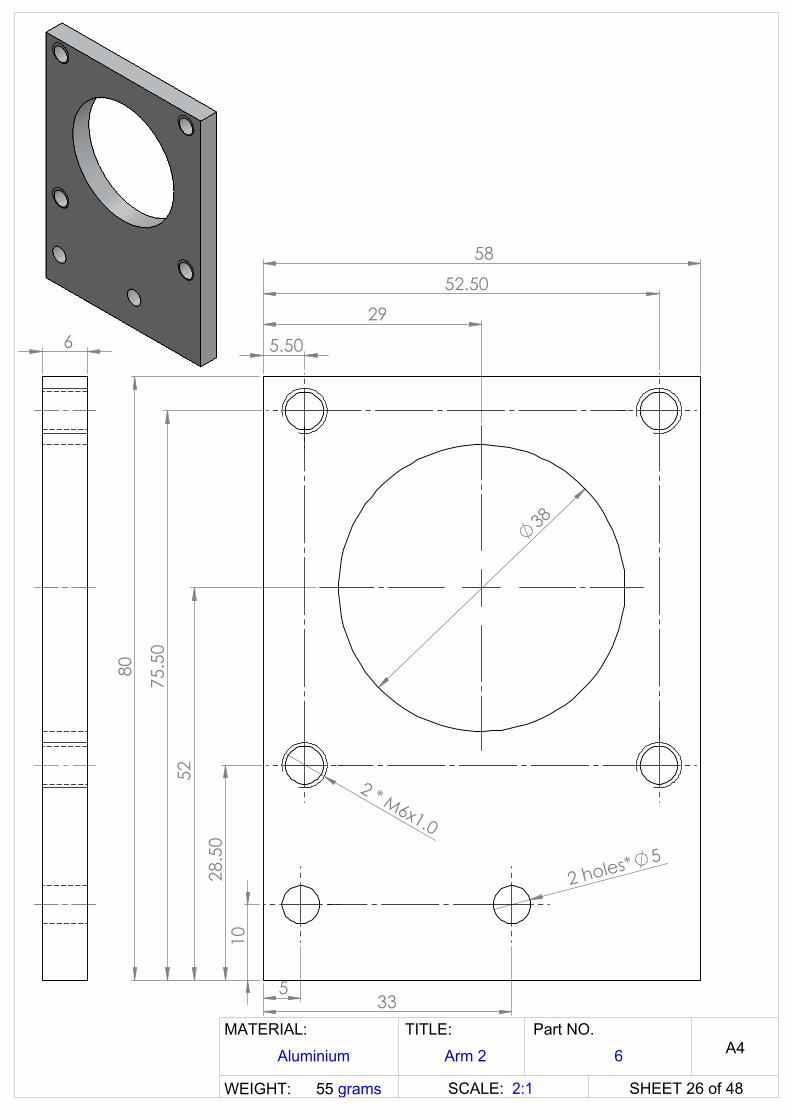
80
10
28.
50
52
75.
50
38
2 * M6x1.0
33 5
58
5.50
29
52.50
2 holes* 5
6
A4
2:1
Part NO.TITLE:MATERIAL:
55 gramsWEIGHT:
Aluminium Arm 2 6
SCALE: SHEET 26 of 48

13
3
scale 1:1
50
6
44
25
50
6
44
4 * M
5x0.8
24
30
A4
2:1
Part NO.TITLE:MATERIAL:
21 gramsWEIGHT:
Plastic Arm 2 8
SCALE: SHEET 27 of 48
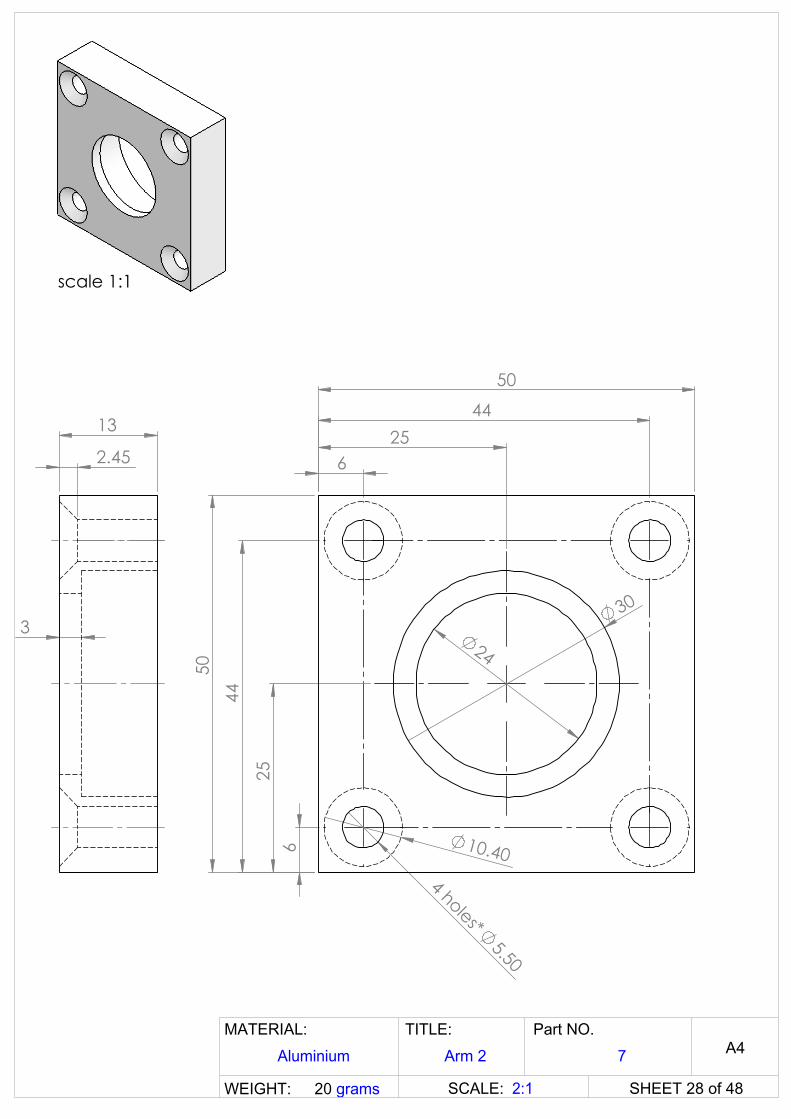
13
3
2.45
scale 1:1
50
6
44
25
50
6 25
44
24
30
4 holes*5.50
10.40
A4
2:1
Part NO.TITLE:MATERIAL:
20 gramsWEIGHT:
Aluminium Arm 2 7
SCALE: SHEET 28 of 48
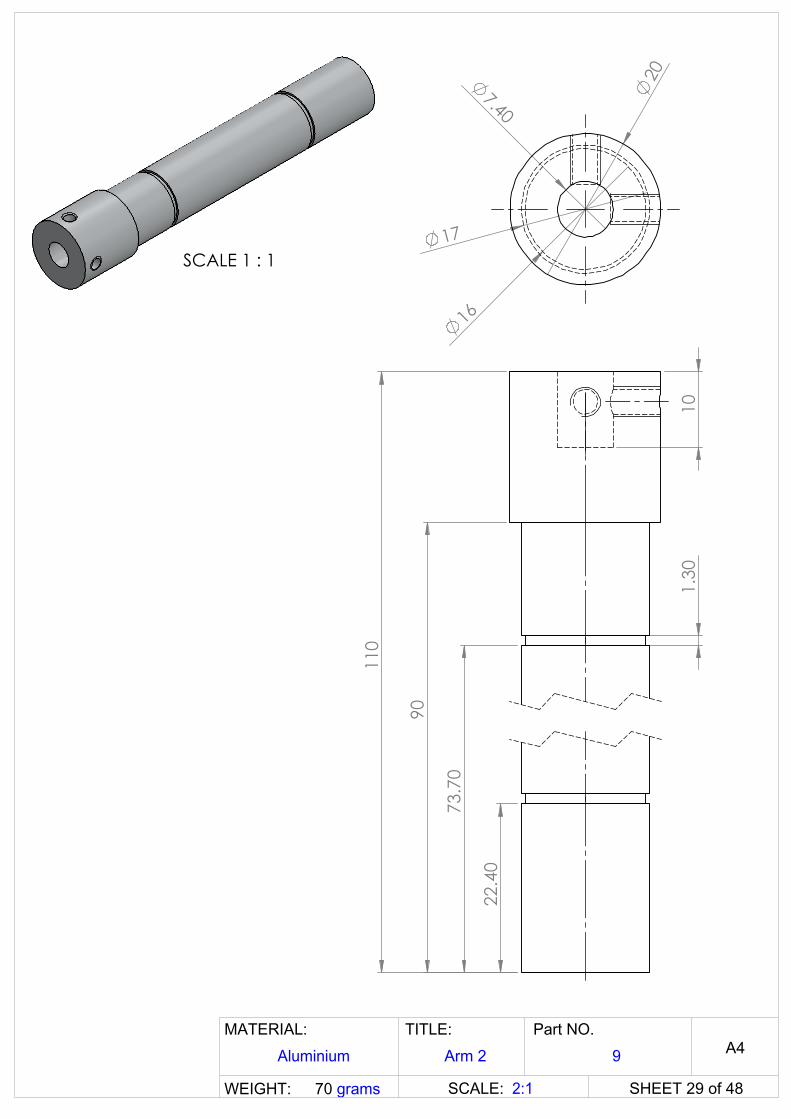
20
7.40
17
16
110
22.
40
73.
70
90
10
1.3
0
SCALE 1 : 1
A4
2:1
Part NO.TITLE:MATERIAL:
70 gramsWEIGHT:
Aluminium Arm 2 9
SCALE: SHEET 29 of 48
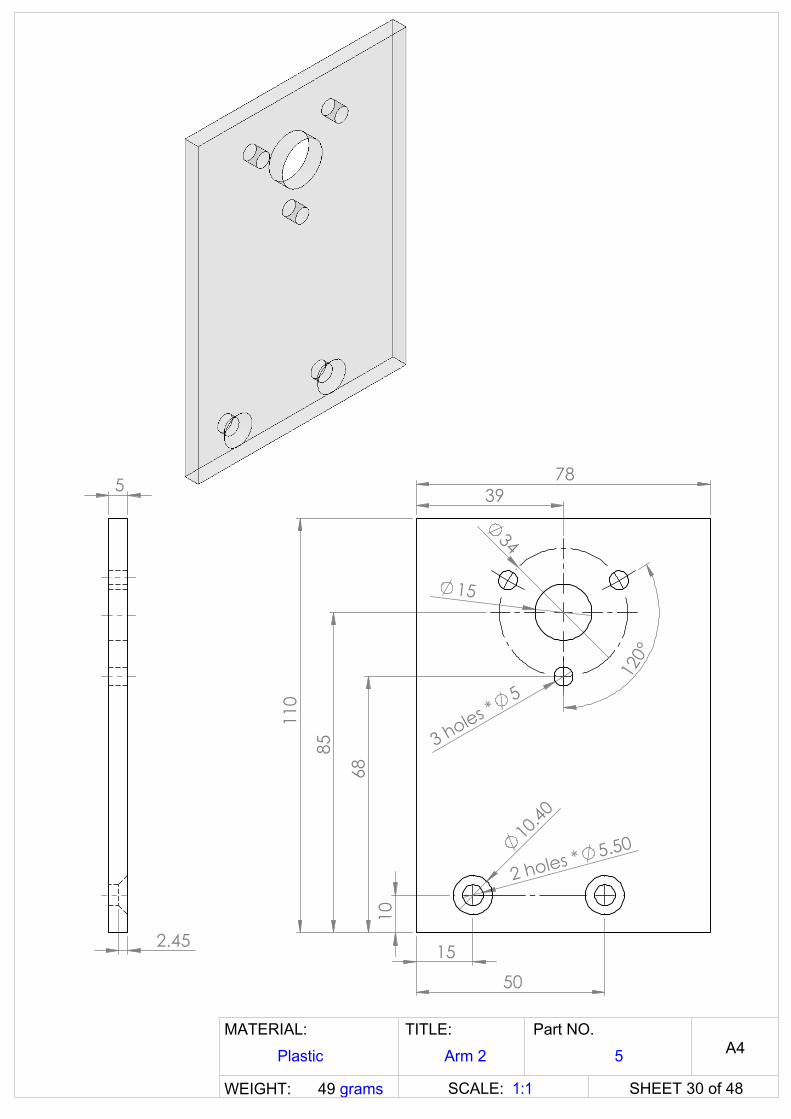
5
2.45
110
10
68 8
5
15
34
120
°
78 39
15 50
2 holes * 5.50 10
.40
3 holes *5
A4
1:1
Part NO.TITLE:MATERIAL:
49 gramsWEIGHT:
Plastic Arm 2 5
SCALE: SHEET 30 of 48

65
45
8.50 36.50
2 *M5x0.8
10
12
10
20
10
15 50
2* M
5x0.8
23 54
2* M
4x0.7
10
A4
1:1
Part NO.TITLE:MATERIAL:
53 gramsWEIGHT:
Plastic Arm 2 4
SCALE: SHEET 31 of 48

90
5 20
45
47
8.5
0 23.
50
38.
50 3
holes*5
20
10
M12x1.5
27
13.
50
45
15
13.
50
M12x1.5
23.
50
13.50
A4
1:1
Part NO.TITLE:MATERIAL:
707 gramsWEIGHT:
Iron Arm 2 1
SCALE: SHEET 32 of 48
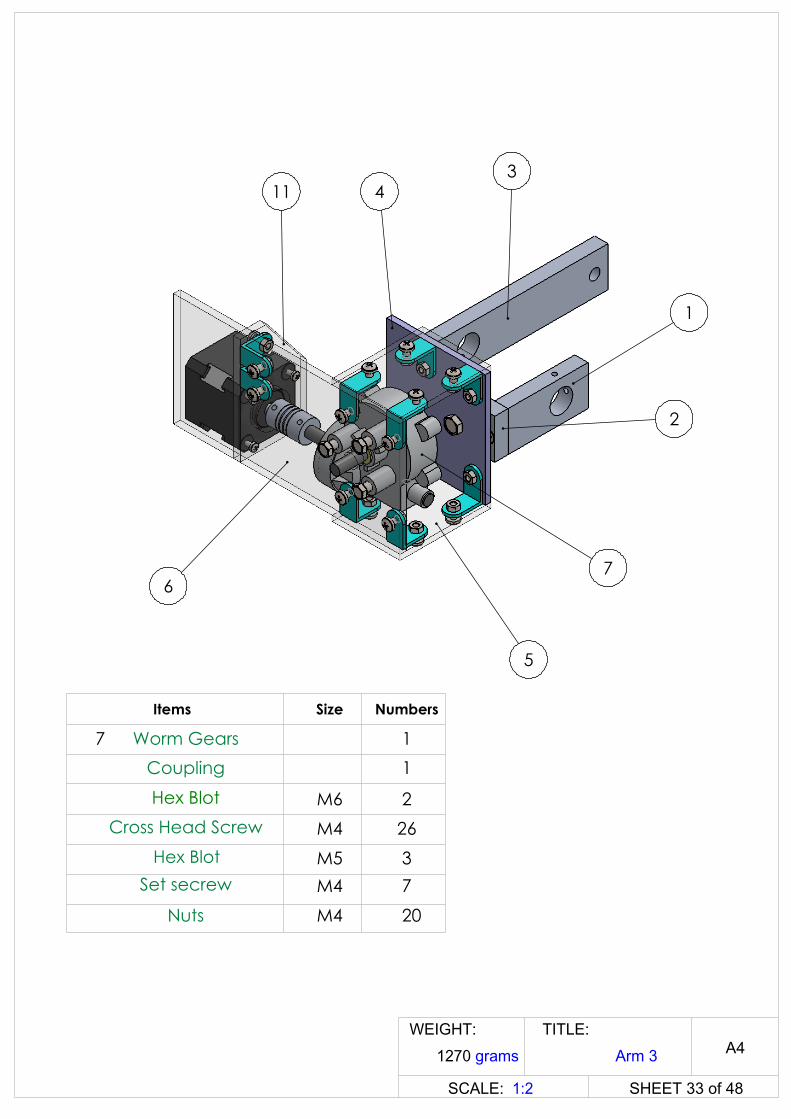
3
1
5
76
11 4
2
A4
1:2
TITLE:1270 grams
WEIGHT:Arm 3
SCALE: SHEET 33 of 48
7 11Coupling
Worm Gears
20M47M43M5Hex Blot26M42M6
Size
Nuts
Set secrew
Cross Head ScrewHex Blot
NumbersItems
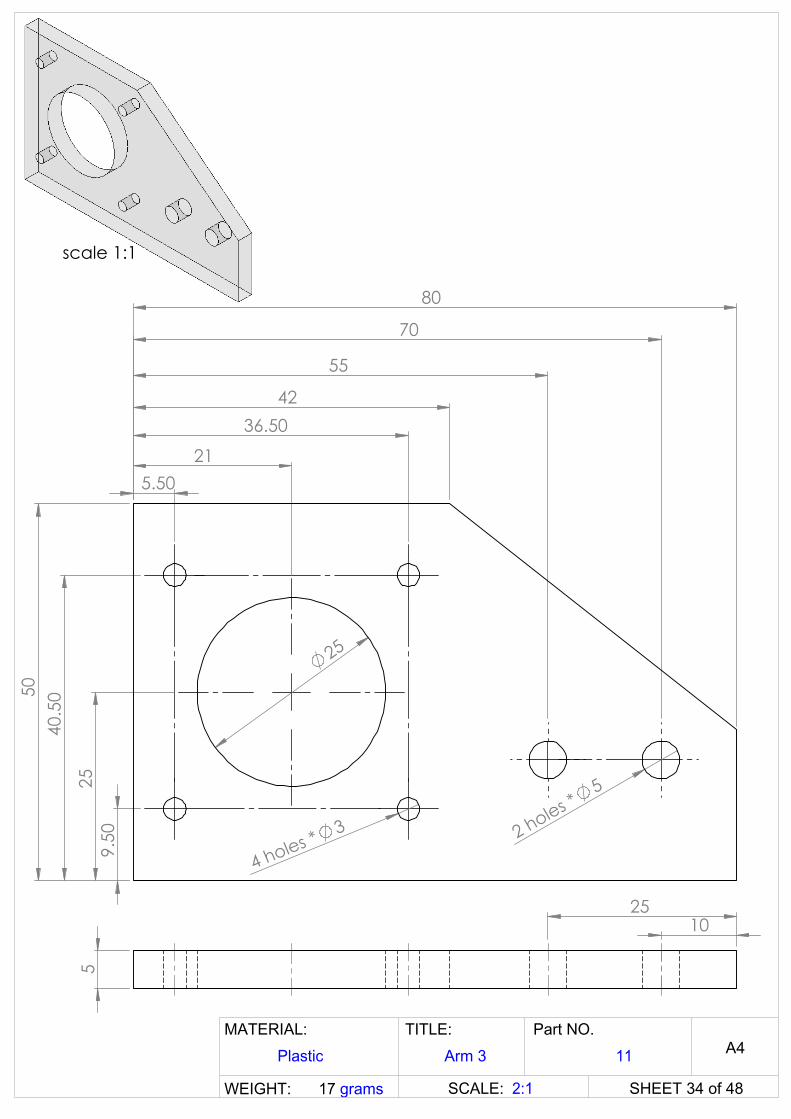
50
9.5
0 2
5
40.
50
80
5.50 21
42 36.50
55
70
25
4 holes *3 2 holes *
5
scale 1:1
5
10 25
A4
2:1
Part NO.TITLE:MATERIAL:
17 gramsWEIGHT:
Plastic Arm 3 11
SCALE: SHEET 34 of 48

5
170
8
54 37
109
85
42.
50
16
69
120° 4 holes * 4
3 holes *6
10
2 holes * 4
50
65
SCALE 1 : 2
A4
1:1
Part NO.TITLE:MATERIAL:
85 gramsWEIGHT:
Plastic Arm 3 6
SCALE: SHEET 35 of 48

51
8
43
68
20 48
4 holes *
4
scale 1:1
4
A4
2:1
Part NO.TITLE:MATERIAL:
16 gramsWEIGHT:
Plastic Arm 3 5
SCALE: SHEET 36 of 48

85
16
42.
50
74
22
31
66
69
2 holes*6
4 holes *5
52 4
A4
1:1
Part NO.TITLE:MATERIAL:
66 gramsWEIGHT:
Aluminium Arm 3 4
SCALE: SHEET 37 of 48

145
30
15
10
105
17
8
8
10
5
M4x0.7
M4*0.7
A4
1:1
Part NO.TITLE:MATERIAL:
109 gramsWEIGHT:
Aluminium Arm 3 3
SCALE: SHEET 38 of 48

60
20
17
8
M4x
0.7
10
5
15
SCALE 1 : 1
2 * M4x0.7
5
M4*0.7
A4
2:1
Part NO.TITLE:MATERIAL:
42 gramsWEIGHT:
Aluminium Arm 3 1
SCALE: SHEET 39 of 48
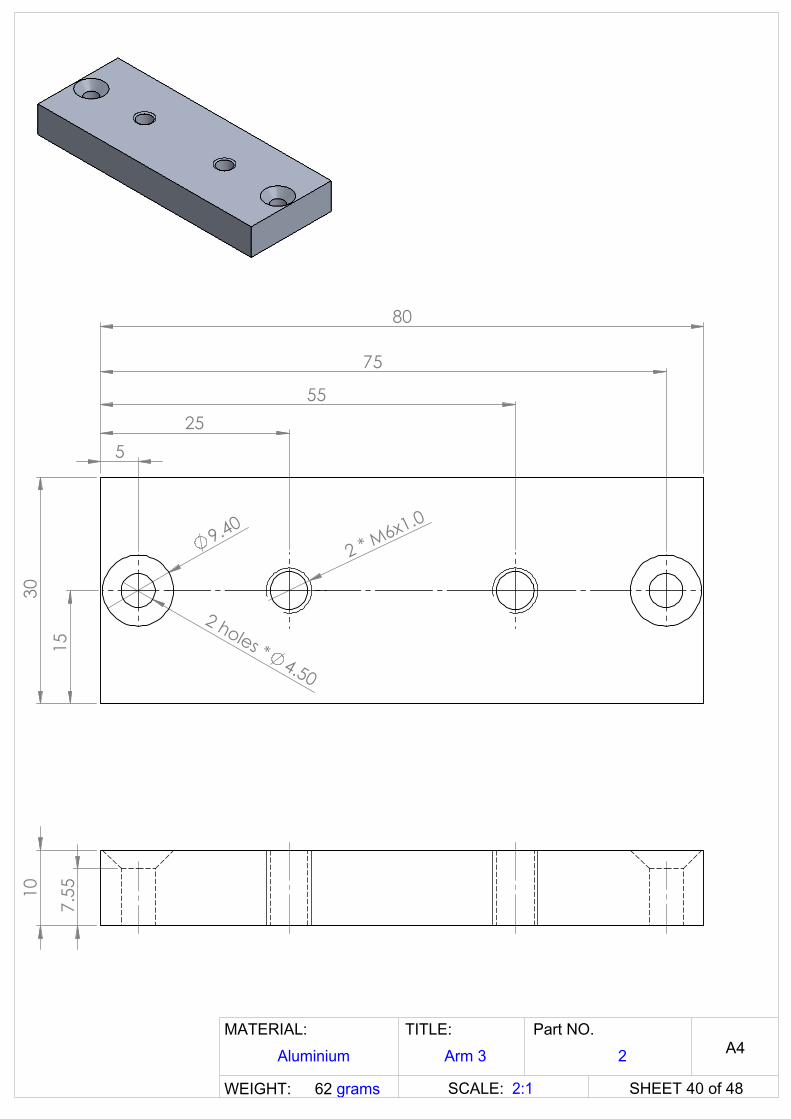
10
7.5
5
30
15
80
5 25
55
75
2 holes *4.50
2 * M6x1.0
9.40
A4
2:1
Part NO.TITLE:MATERIAL:
62 gramsWEIGHT:
Aluminium Arm 3 2
SCALE: SHEET 40 of 48

8
91
2
6
A4
1:1
TITLE:985 grams
WEIGHT:Arm 4
SCALE: SHEET 41 of 48
Items Numbers
Cross Head Screw
Set secrew
Nuts
Size
M5 2M4 7
Hex Blot M5 3M4 6M4 4
Worm GearsCoupling 1
128
Cross Head Screw
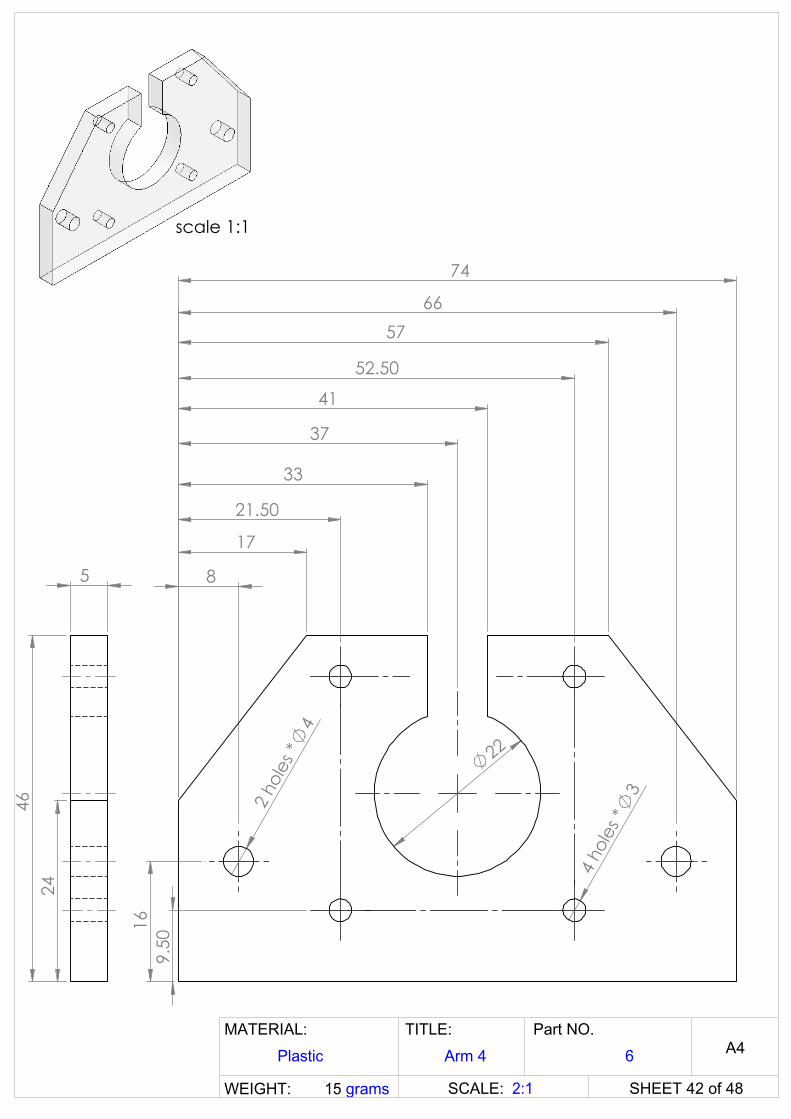
5
46
24
74
8
17
21.50
33
41
37
52.50
66 57
9.5
0 16
22
4 h
oles
*3
2 h
oles
*4
scale 1:1
A4
2:1
Part NO.TITLE:MATERIAL:
15 gramsWEIGHT:
Plastic Arm 4 6
SCALE: SHEET 42 of 48
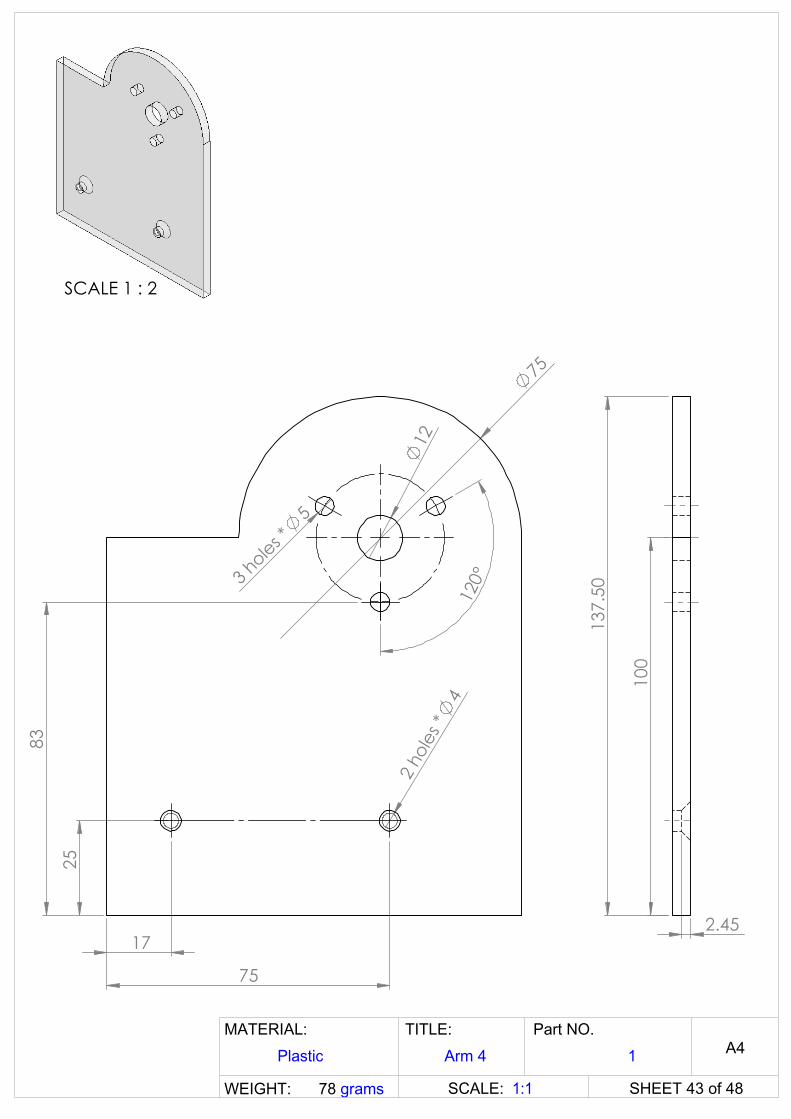
75
25
83
12
120
°
17
75
3 holes *
5
2 h
oles
*4
137
.50
100
2.45
SCALE 1 : 2
A4
1:1
Part NO.TITLE:MATERIAL:
78 gramsWEIGHT:
Plastic Arm 4 1
SCALE: SHEET 43 of 48

68
20
6
33
15
13
50
32.50
20
25
7.40
7
40
7 33
2 * M
5x0.8
2 * M4x0.7
A4
1:1
Part NO.TITLE:MATERIAL:
48 gramsWEIGHT:
Plastic Arm 4 17
SCALE: SHEET 44 of 48
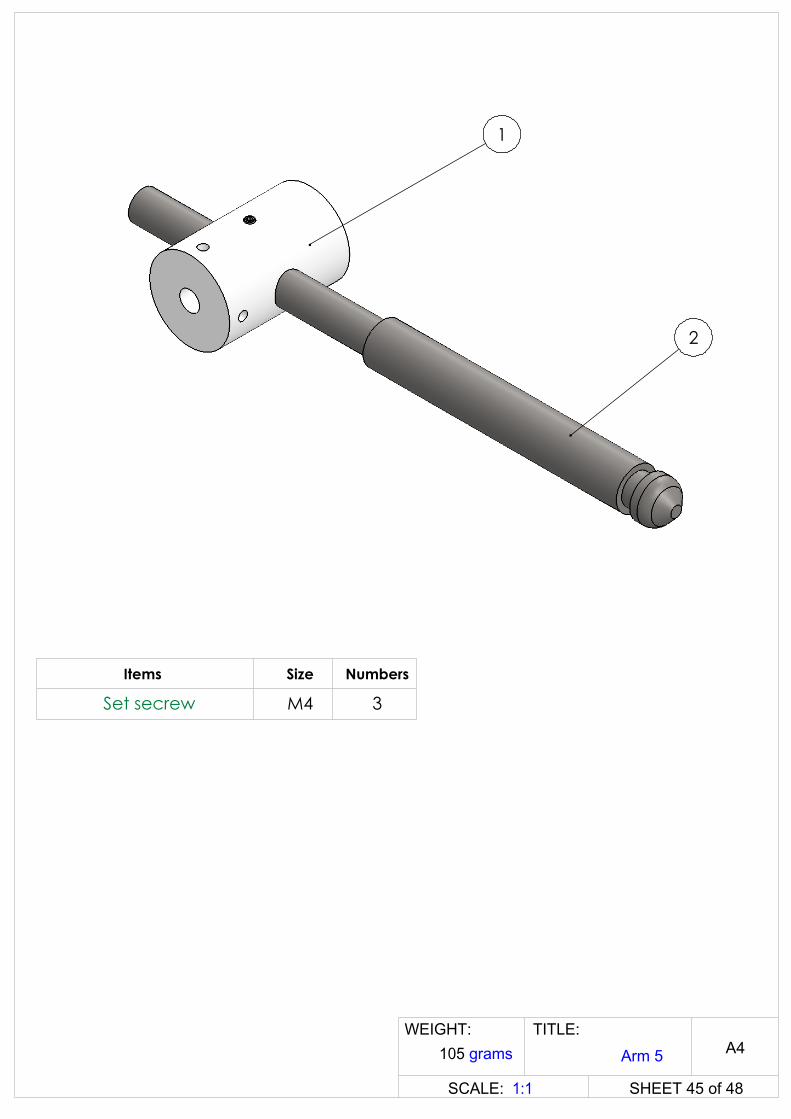
1
2
A4
1:1
TITLE:105 grams
WEIGHT:Arm 5
SCALE: SHEET 45 of 48
M4
Size
Set secrew
NumbersItems
3

200
185
190
90
11
4 15
A4
1:1
Part NO.TITLE:MATERIAL:
73 gramsWEIGHT:
Plastic Arm 5 2
SCALE: SHEET 46 of 48
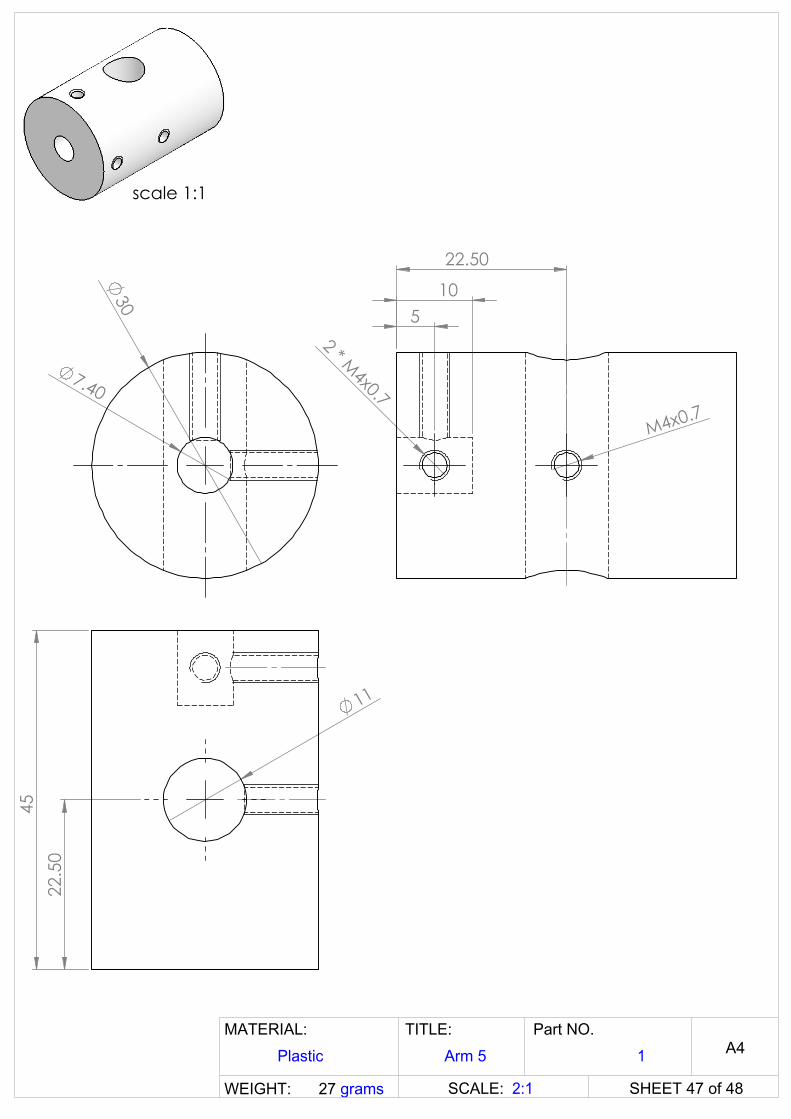
30
7.40
45
22.
50
11
M4x0.7
5
22.50
10
2 * M4x0.7
scale 1:1
A4
2:1
Part NO.TITLE:MATERIAL:
27 gramsWEIGHT:
Plastic Arm 5 1
SCALE: SHEET 47 of 48

R6
4
22
22
A4
5:1
TITLE:MATERIAL:
2.5 gramsWEIGHT:
Aluminium Arm 3,4
SCALE: SHEET 48 of 48
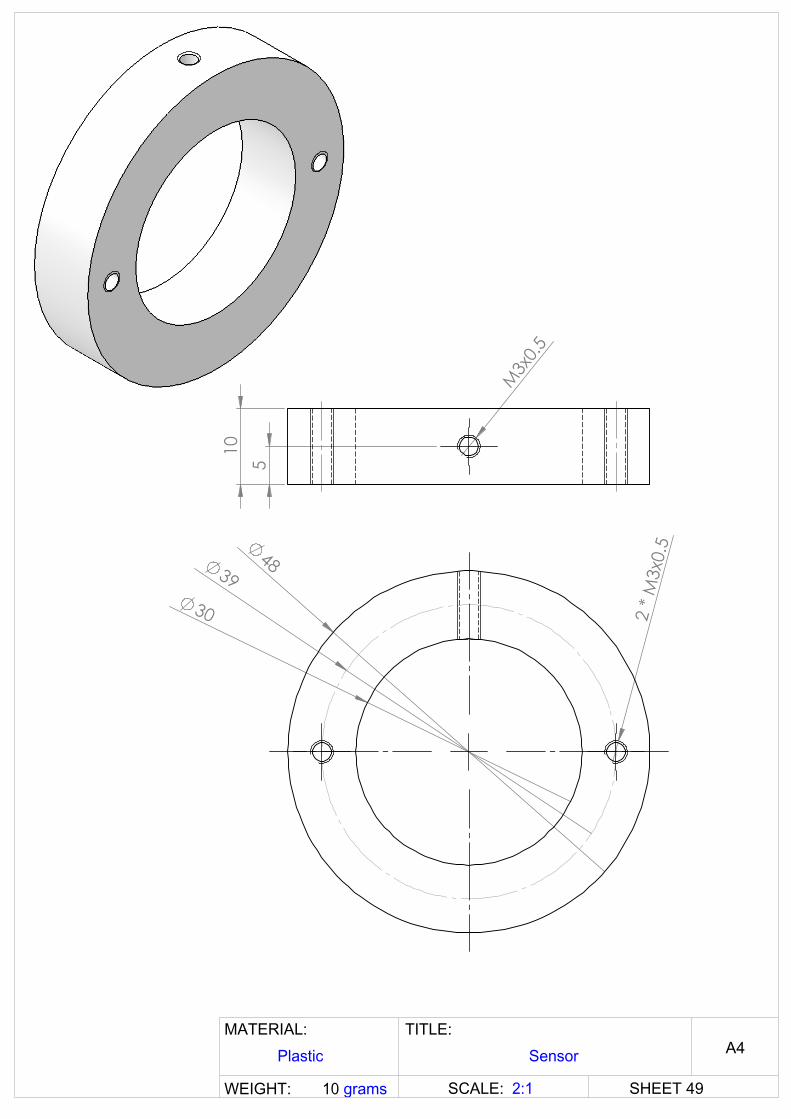
48
30 2 *
M3x
0.5
39
10
5
M3x
0.5
A4
2:1
TITLE:MATERIAL:
10 gramsWEIGHT:
Plastic Sensor
SCALE: SHEET 49
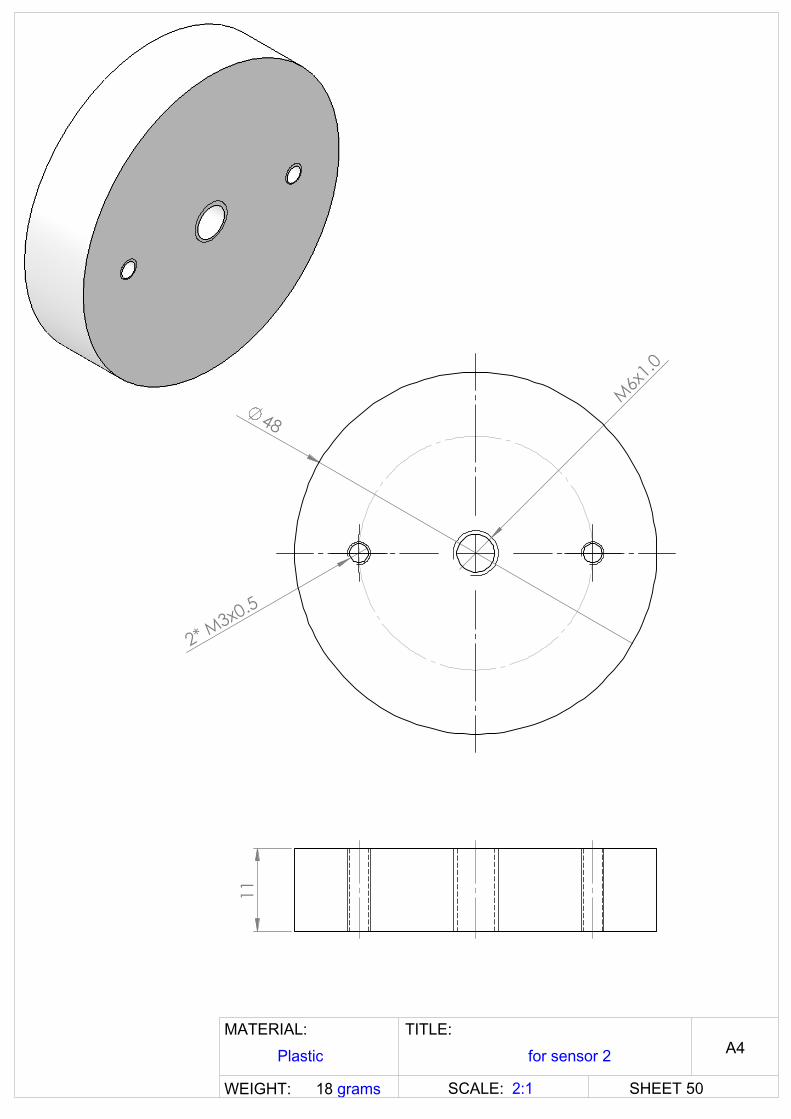
48
2* M3x0.5
M6x
1.0
11
A4
2:1
TITLE:MATERIAL:
18 gramsWEIGHT:
Plastic for sensor 2
SCALE: SHEET 50
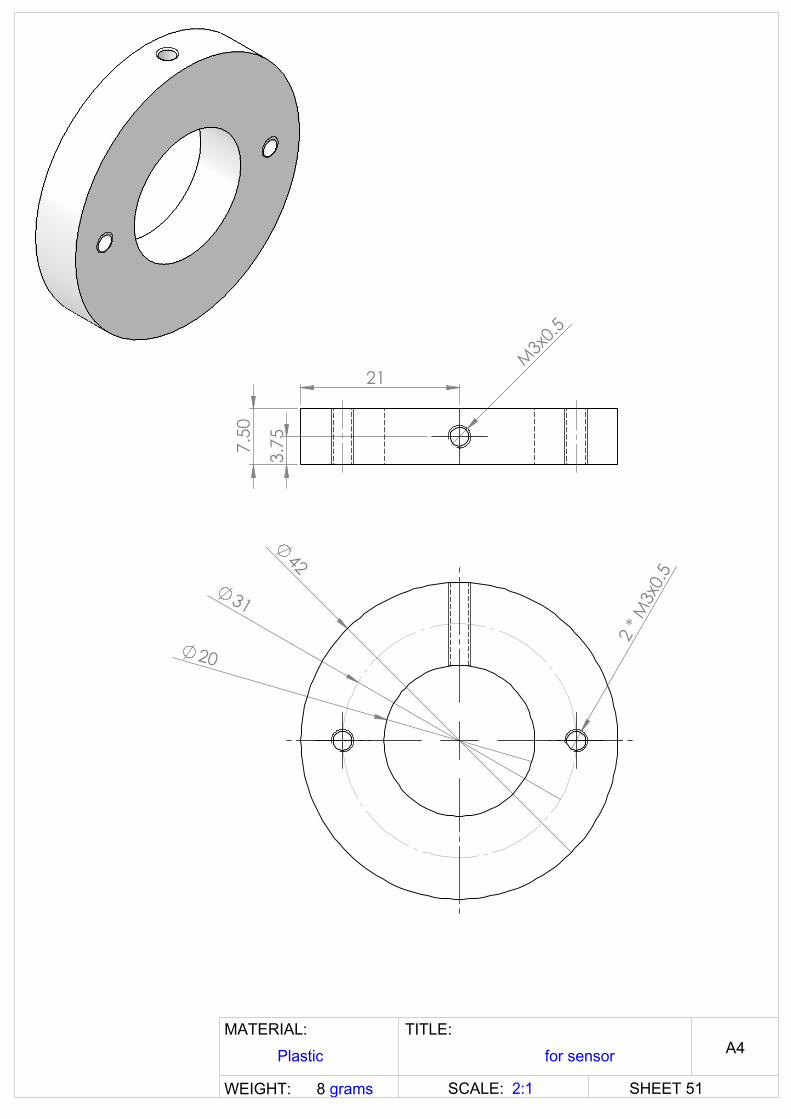
42
2 *
M3x
0.5
20
31
7.5
0
3.7
5
21 M
3x0.5
A4
2:1
TITLE:MATERIAL:
8 gramsWEIGHT:
Plastic for sensor
SCALE: SHEET 51

45
25 2 *
M3x
0.5
35
8
4
M3x
0.5
A4
2:1
TITLE:MATERIAL:
8 gramsWEIGHT:
Plastic for sensor
SCALE: SHEET 52

SCALE 1 : 10
97
108
91
85
90
112
117
118
100
114
84
113
88 89
92
93
116
100
115
Items Numbers
Hex BlotCross Head Screw
Set secrew
Nuts
Ball Bearing
Size
M5 4
M4 68
M4 4
M8 11
30*10*9 2

44
7.5
0 16
23 2
4 3
8.50
33
41
57
17
2 h
oles
*4
4 holes*
3
22
scale 1:1
74
7.50 21.50
37 52.50
66.50
5
A4
2:1
Part NO.MATERIAL:
14 gramsWEIGHT:
Plastic 93
SCALE: SHEET 1 of 16

40
12.
25
17.
75
125
15 110
7
5 42
40
32
4 holes*3.50
2
2
A4
1:1
Part NO.MATERIAL:
49 gramsWEIGHT:
Aluminium 89
SCALE: SHEET 2 of 16
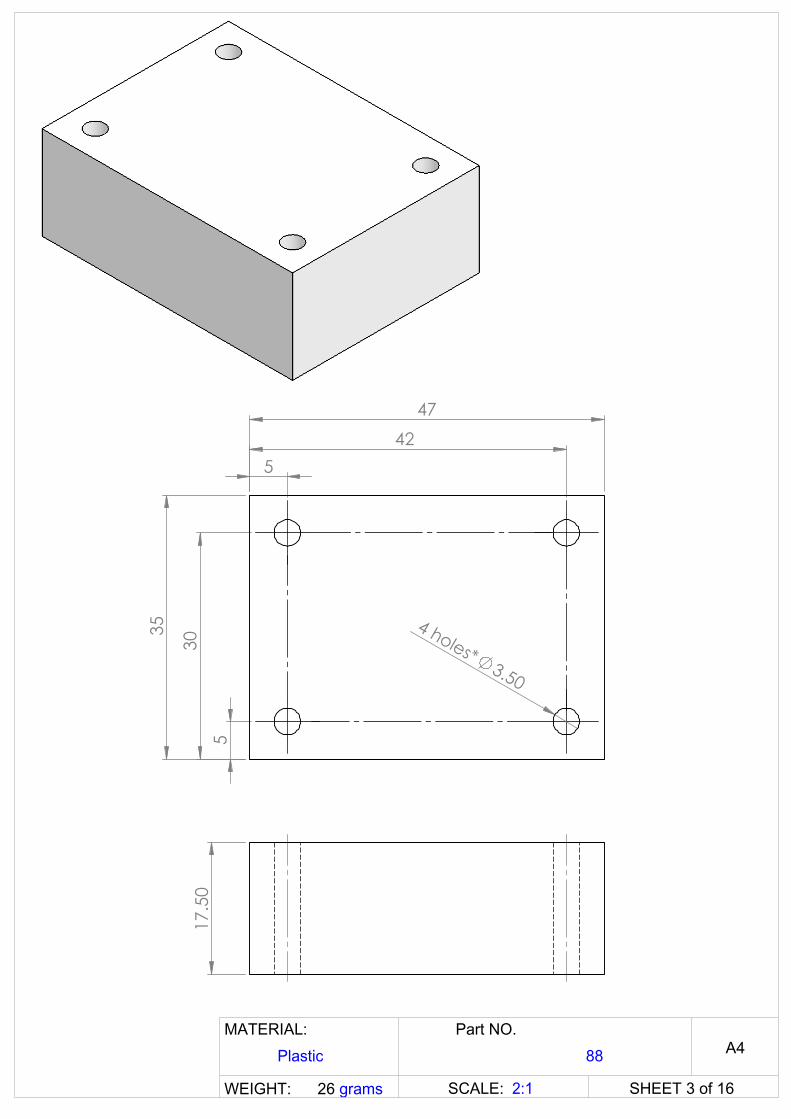
47
5 42
35
5
30
4 holes*3.50
17.
50
A4
2:1
Part NO.MATERIAL:
26 gramsWEIGHT:
Plastic 88
SCALE: SHEET 3 of 16
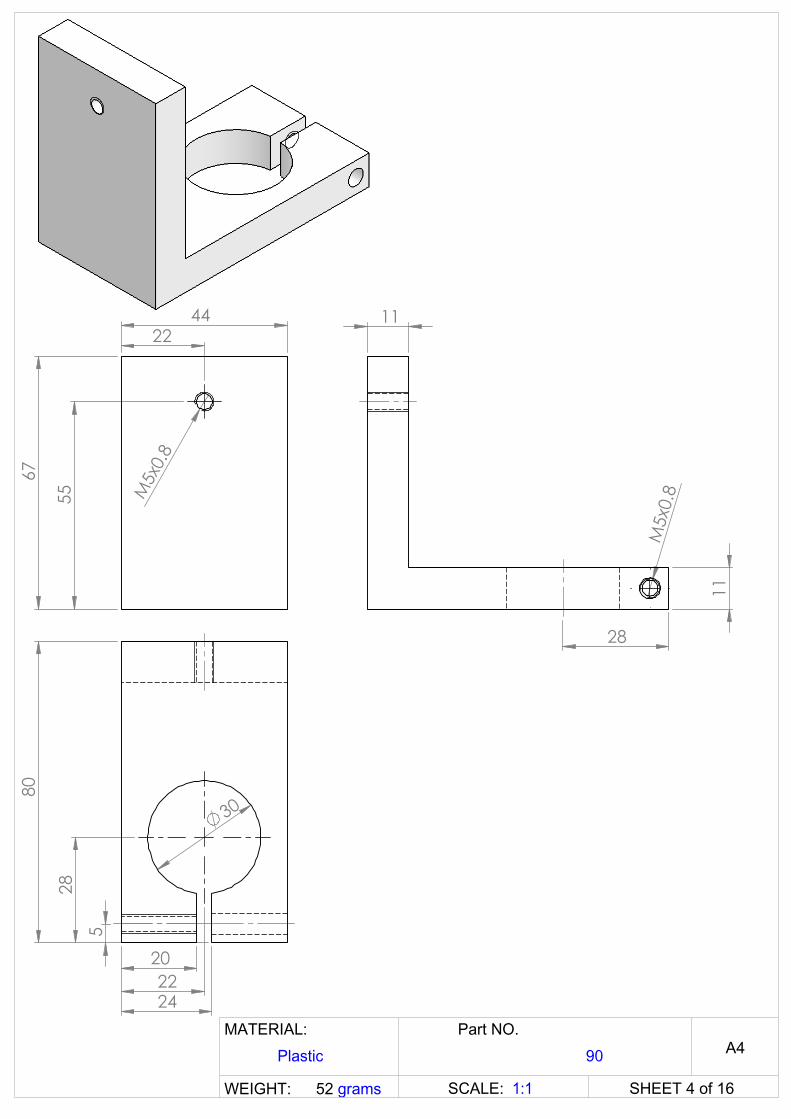
67
55 M5x
0.8
44 22
30 8
0
28
20
24 22
5
11
11
28 M
5x0.
8
A4
1:1
Part NO.MATERIAL:
52 gramsWEIGHT:
Plastic 90
SCALE: SHEET 4 of 16

67
55
24 12
M5x0.8
70 5
M5x
0.8
11
11
70
5 1
7
12
.50
A4
1:1
Part NO.MATERIAL:
28 gramsWEIGHT:
Plastic 91
SCALE: SHEET 5 of 16
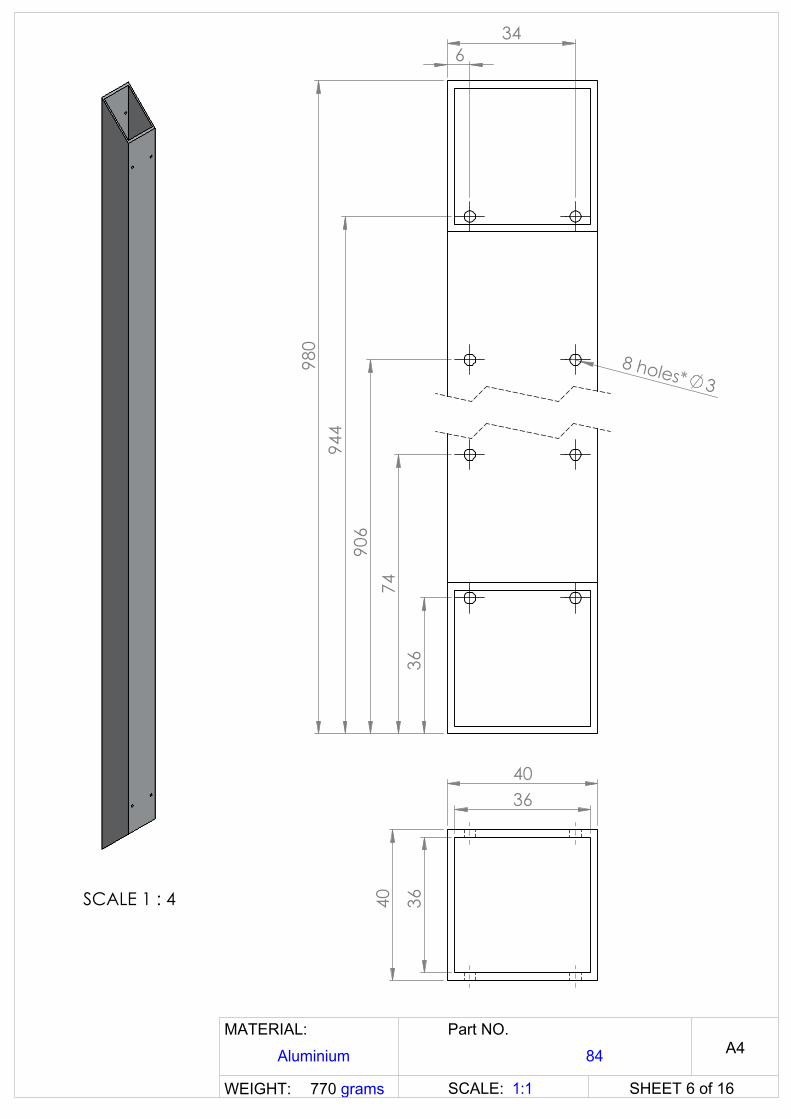
980
36
74
906
9
44
6 34
8 holes* 3
SCALE 1 : 4 40
36
40 36
A4
1:1
Part NO.MATERIAL:
770 gramsWEIGHT:
Aluminium 84
SCALE: SHEET 6 of 16
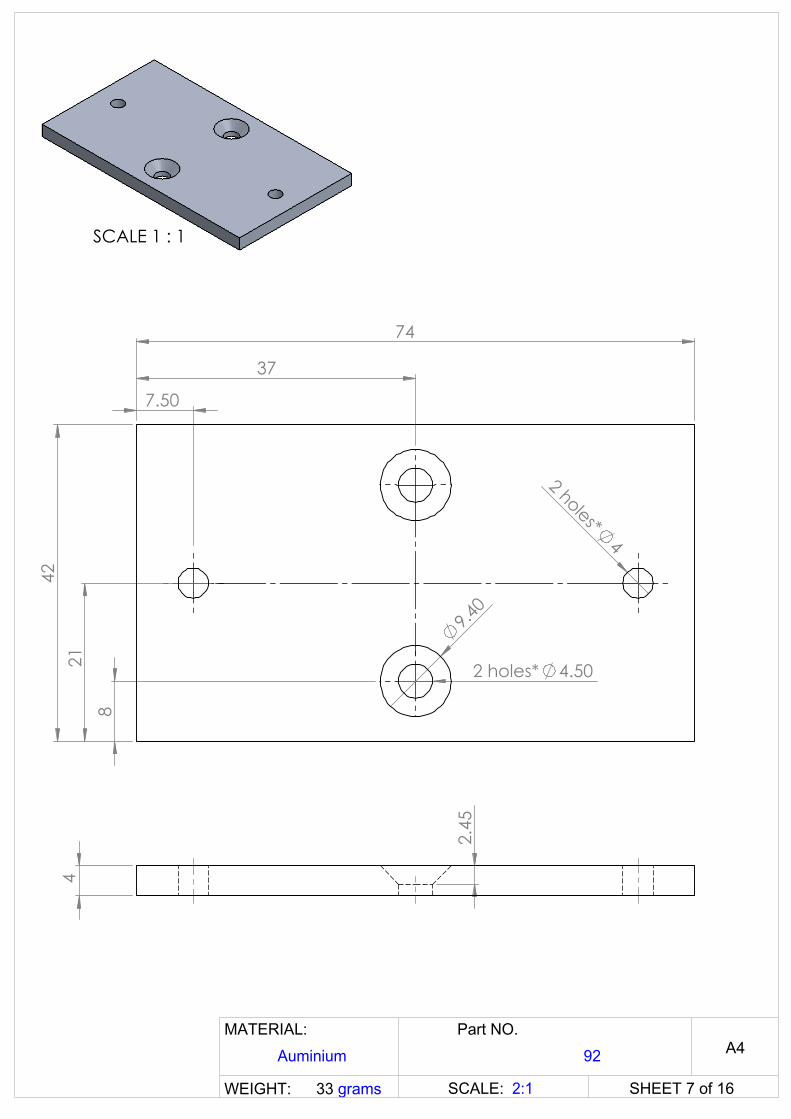
4
2.4
5
42
8
21
74
7.50
37
2 holes*4
2 holes* 4.50
9.4
0
SCALE 1 : 1
A4
2:1
Part NO.MATERIAL:
33 gramsWEIGHT:
Auminium 92
SCALE: SHEET 7 of 16
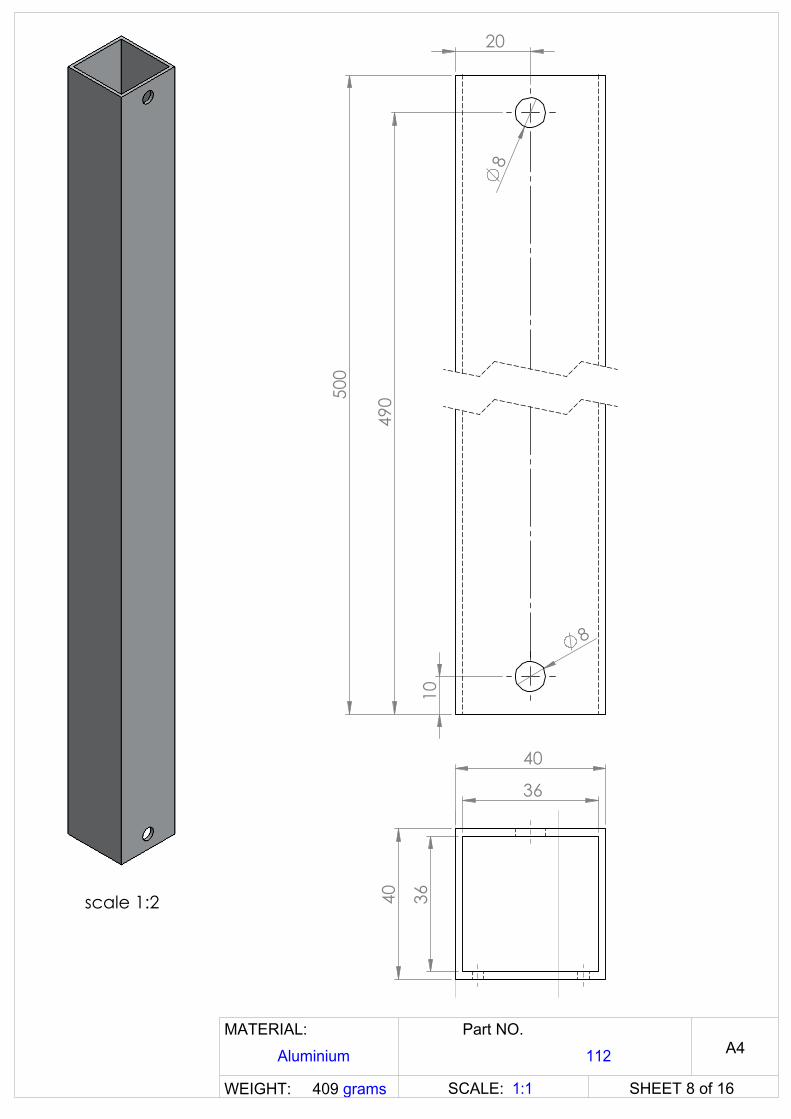
500
10
490
8
20
8
40
36
40
36
scale 1:2
A4
1:1
Part NO.MATERIAL:
409 gramsWEIGHT:
Aluminium 112
SCALE: SHEET 8 of 16

940
4
0 3
0
C
74
194
A
36 B
6 34
4 holes*3
DETAIL ASCALE 3 : 5
6 34
2 holes*
3
DETAIL BSCALE 3 : 5
40
36
40 36
DETAIL CSCALE 3 : 5
A4
1:5
Part NO.MATERIAL:
754 gramsWEIGHT:
Aluminium 85
SCALE: SHEET 9 of 16
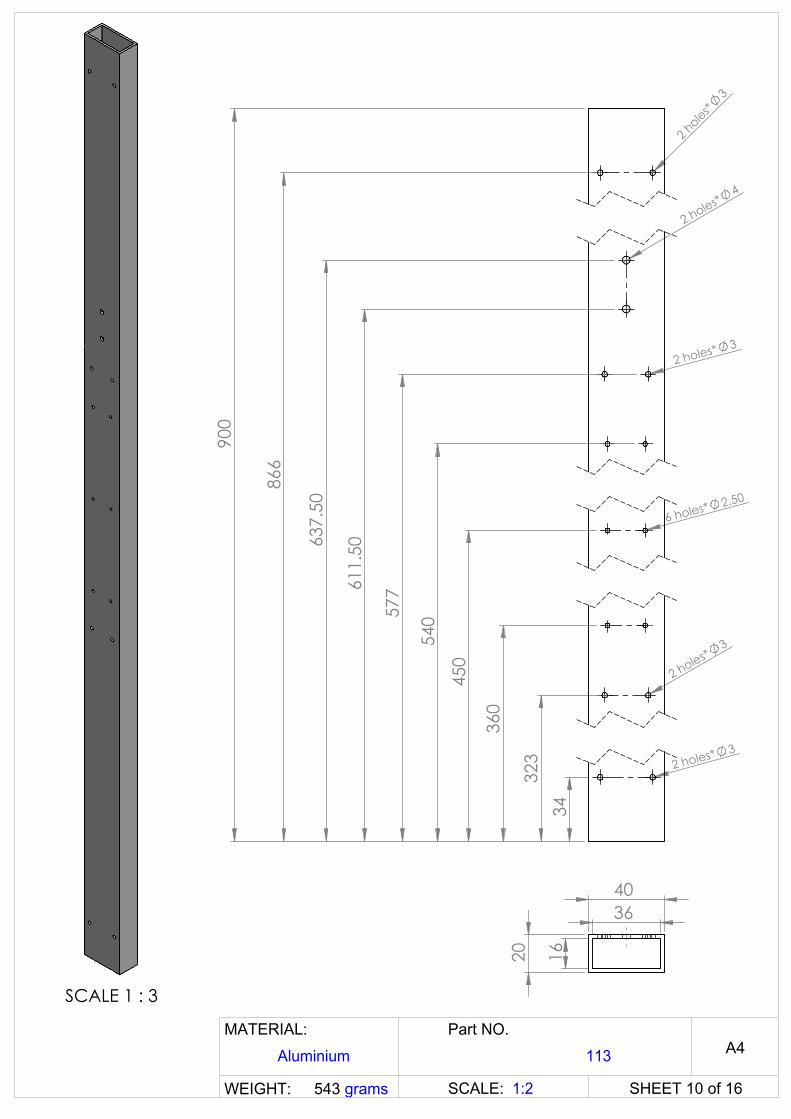
900
34
323
360
450
540
577
611
.50 637
.50 8
66
2 holes*
3
2 holes*4
2 holes* 3
2 holes*3
2 holes* 3
6 holes* 2.50
SCALE 1 : 3
20
16
40 36
A4
1:2
Part NO.MATERIAL:
543 gramsWEIGHT:
Aluminium 113
SCALE: SHEET 10 of 16
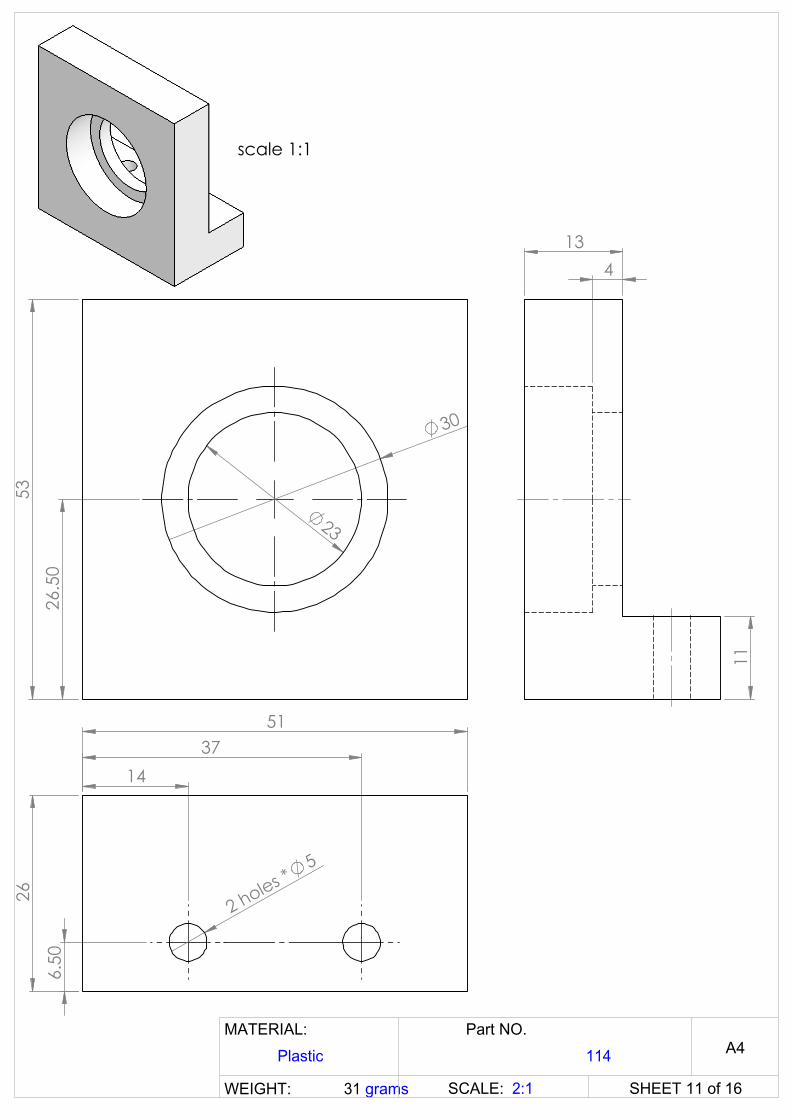
53
26.
50
23
30
11
4 13
26
6.5
0
51
14 37
2 holes *5
scale 1:1
A4
2:1
Part NO.MATERIAL:
31 gramsWEIGHT:
Plastic 114
SCALE: SHEET 11 of 16

40
10 3
0
210
15 105
195
6.30 6 holes *3.40
scale 1:1
8.5
0 1.4
5
A4
1:2
Part NO.MATERIAL:
65 gramsWEIGHT:
Plastic 115
SCALE: SHEET 12 of 16

40
34
40
6 34
2 holes *3
3
3
scale 1:1
40 34
40
34
6
2 holes * 3
A4
2:1
Part NO.MATERIAL:
24 gramsWEIGHT:
Aluminium 116
SCALE: SHEET 13 of 16

18
96 204
321 429
546 654
B
500
106
1
34
366
394
12 holes * 2.50
A
SCALE 1 : 10
108
28
DETAIL ASCALE 3 : 5
5
DETAIL BSCALE 4 : 5
A4
1:5
Part NO.MATERIAL:
1079 gramsWEIGHT:
Wood 117
SCALE: SHEET 14 of 16

270
236
6 34
4 holes*
3.50
40 36
40
36
A4
1:1
Part NO.MATERIAL:
221 gramsWEIGHT:
Aluminium 118
SCALE: SHEET 15 of 16
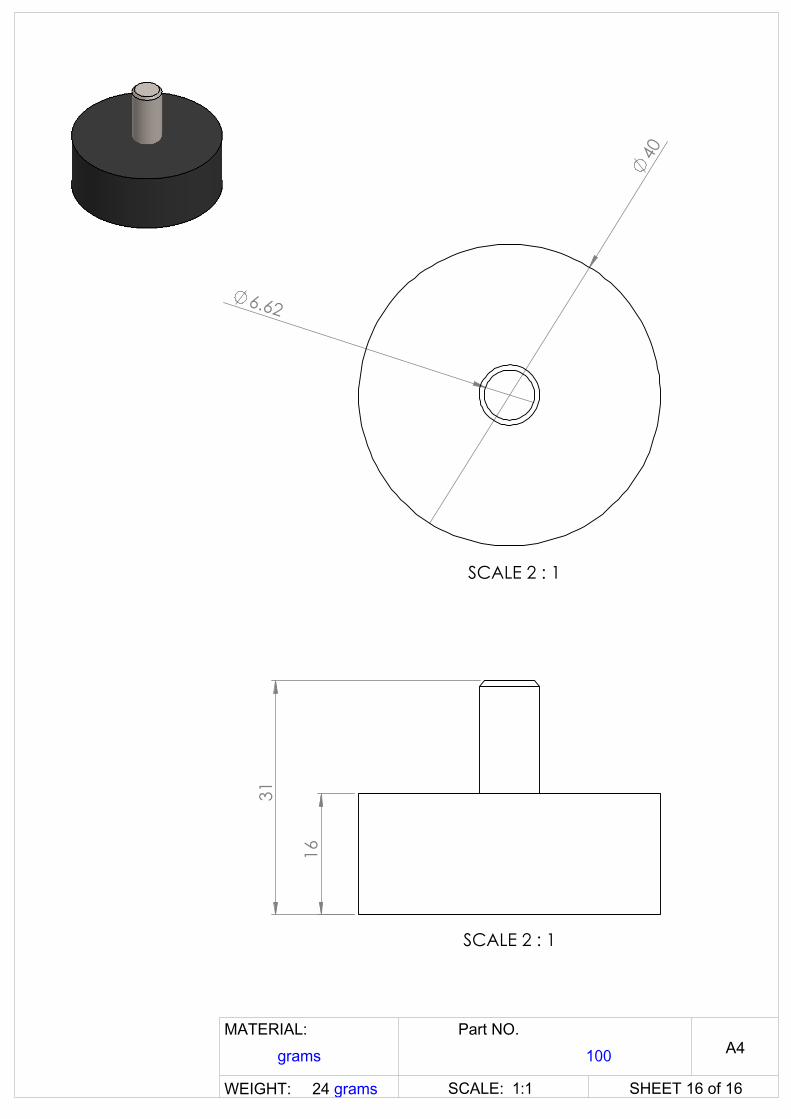
31
16
SCALE 2 : 1
40
6.62
SCALE 2 : 1
A4
1:1
Part NO.MATERIAL:
24 gramsWEIGHT:
grams 100
SCALE: SHEET 16 of 16

Summary
Three dimensional simulation technique used as important tool for
modeling motion and modeling production processes which required
implemented by industrial robot. In this research the derivation of
mathematical model for fife DOF welding robot. We suggest new method
by using equations of intersection of two circles to calculate some of
robot angles and simulation it in three dimensional space within Matlab.
The research results shown the importance of simulation process. The
simulation process shown the reliability of using equations of intersection
of two circles to calculate some of robot angles
Also in this research we will discuss finding a dynamic model of
robot, then create program to perform calculation processes. We suggest
writing torque equations by using matrixes and repeat cycles in our
programe. The research results shown the reliability of using matrixes and
repeat cycles to increase the performance of the program. In this research we have shown steps of designing and executing
fife DOF Robot, We suggest method to determine workspace of robot,
also we have shown used equipment and we will test the accuracy of end
effector motion. The importance of this research is design of intelligent technique
to determine welding path in workpiece without drawing it by CAD.
Subsequently, we getting accuracy in executing the welding and
increasing the productivity by decreasing the time which we needed for
drawing and preparing the workpiece. The research results proved the
reliability of proposed design to determine welding path for welding
robot. Also we will develop the vision technique to adjust the distance
between welding torch and workpiece and therefore provide the required
information for the robot's control system to do suitable works according
to specific requirement. he research results proved the measuring
technique has a very high accuracy within a specific domain.
In addition we designed vision technique for detecting any
deviation in the workpiece position, and therefore providing the
information for the robot's control system is required to modifying the
path of the robot depending on current workpiece position. The results of
this research has proved the reliability of proposed design to adjust the
workpiece position for welding robot.
Keywords: Welding Robot, Forward Kinematics, inverse kinematics,
Simulation, Modeling, Dynamic Modeling, Computer Vision, Image Processing.
Syrian Arab Republic
Aleppo University
Faculty of Mechanical Engineering
Certificate We witness that the described work in this treatise is the result of
scientific search conducted by the candidate Mohamed Tair under the
supervision of doctor Alaa Sid Baker (main supervisor) professor at the
Department of Applied Mechanics, Faculty of Mechanical Engineering,
University of Aleppo, and doctor Fadel Sukkar (assistant supervisor)
assistant professor at the Department of Artificial Intelligence, Faculty of
Informatics Engineering, University of Aleppo.
Any other references mentioned in this work are documented in the text
of the treatise.
Candidate Assistant supervisor Main Supervisor Eng. Mohamed Tair Dr. Fadel Sukkar Dr.Alaa Sid Baker
1620

Syrian Arab Republic
Aleppo University
Faculty of Mechanical Engineering
Declaration
It is hereby declare that this work (Designing and Executing Intelligent
Control Systems to Determine Welding Paths for Industrial Robot) has not
already been accepted for any degree, and it is not being submitted
concurrently for any other degree.
Candidate Eng. Mohamed Tair
1620
Syrian Arab Republic
Aleppo University
Faculty of Mechanical Engineering
Designing and Executing Intelligent Control
Systems to Determine Welding Paths for
Industrial Robot
A thesis submitted in partial fulfillment of the
requirements for the degree of
Doctor of Philosophy in Engineering
By
Eng. Mohamed Tair
Supervised By
Dr. Alaa Sid Baker Dr. Fadel Sukkar Department of Applied Mechanics Department of Artificial Intelligence
Faculty of Mechanical Engineering Faculty of Informatics Engineering
Aleppo University Aleppo University
Dr. Abd Al Kader Homeda, Aleppo University – Syria
Dr. Mohand Tarsha Kordi, Aleppo University – Syria
2016
Syrian Arab Republic
Aleppo University
Faculty of Mechanical Engineering
Designing and Executing Intelligent Control
Systems to Determine Welding Paths for
Industrial Robot
A thesis submitted in partial fulfillment of the
requirements for the degree of
Doctor of Philosophy in Engineering By
Eng. Mohamed Tair
2016
Copyright © 2022 FDOKUMEN






