Universidad Veracruzana Arti cial Estudio Empírico de...
131
Transcript of Universidad Veracruzana Arti cial Estudio Empírico de...

Universidad Veracruzana
Facultad de Física e Inteligencia
Arti�cial
Estudio Empírico de Operadores de
Cruza en Algoritmos Genéticos para
resolver Problemas de Optimización con
Restricciones
Documento de Tesis que para obtener el grado deMaestro en Inteligencia Arti�cial presenta:
Adriana Cervantes Castillo
Dirigida por el Doctor
Efrén Mezura Montes
�


Estudio Empírico de Operadores de
Cruza en Algoritmos Genéticos
para resolver Problemas de
Optimización con Restricciones
Tesis para obtener el grado de
Maestro en Inteligencia Arti�cial presenta:
Adriana Cervantes Castillo
Dirigida por el Doctor
Efrén Mezura Montes
Universidad Veracruzana
Facultad de Física e Inteligencia Arti�cial
�

Agradecimientos
Y dijo al hombre: He aquí que el temor
del Señor es la sabiduría y el apartarse
del mal, la inteligencia.
Job 28:28
La presente tesis no hubiera sido posible sin el apoyo de cada una de laspersonas que directa o indirectamente estuvieron siempre cerca de mi, brin-dándome sus consejos y sabiduría durante todo el transcurso de la maestría.
Doy gracias a mi Dios Jehová que es el mismo Dios de Abraham, Isaacy Jacob, un Dios poderoso que ha estado conmigo desde mi niñez y que secon certeza que me acompañará hasta el día en que pueda verlo cara a cara.Gracias por darme la sabiduría, la paciencia y la fortaleza para terminar esteciclo en mi vida.
Gracias sin duda a mis padres que siempre están listos para socorrermeen todo momento. Gracias madre por no dejar de insistir en que lo que seinicia se termina. Estoy en este punto porque tu estuviste en el momentooportuno.
Gracias a mis compañeros de clase, sin duda grandes personas a los cualesles esperan grandes oportunidades en su vida. Gracias Adán por estar siempredispuesto a ayudar, gracias Elva por tu amabilidad, carisma y sinceridad;gracias Jorge por tu humildad, gracias Dolores, Javier y Alexi.
Gracias a mis profesores, todos son grandes personas con gran conoci-miento en su área. Gracias Dr. Nicandro por darme sus consejos, por es-cucharme cuando lo necesité, gracias Dr. Hector por su integridad, graciasDr. Homero por su amabilidad, gracias maestra Rocío. Agradezco de maneraespecial al Dr. Efrén Mezura Montes que es el director de esta tesis, sin suapoyo este trabajo no sería lo que hoy es, gracias por sus consejos y porsu disposición, gracias por la atención brindada durante clases y durante eltiempo que duró este trabajo.
½Gracias!!!
v


Resumen
Este trabajo de tesis será de utilidad para todos aquéllos interesados enel estudio o aplicación de algoritmos evolutivos para dar solución a proble-máticas de la vida real. La tesis presenta los conceptos generales de cómputoevolutivo y un estudio empírico realizado a dos operadores de cruza conalgoritmos genéticos resolviendo problemas de optimización numérica conrestricciones. El documento de tesis presenta seis capítulos que son intro-ducción: presenta un panorama general al documento de tesis; cómputo evo-lutivo: muestra los conceptos generales del cómputo evolutivo; optimización:presenta una breve introducción al concepto de optimización; algoritmos ge-néticos: describe los elementos generales de estos algoritmos; propuesta yresultados: se describe la propuesta de tesis y se muestran los resultados ob-tenidos después de llevar a cabo dicha propuesta, conclusiones: presenta lasconclusiones obtenidas a partir de la hipótesis presentada.
vii


Índice
Agradecimientos v
Resumen vii
1. Introducción 11.1. Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. De�nición del Problema . . . . . . . . . . . . . . . . . . . . . 51.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.1. Objetivo General . . . . . . . . . . . . . . . . . . . . . 51.3.2. Objetivos Especí�cos . . . . . . . . . . . . . . . . . . . 5
1.4. Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5. Justi�cación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6. Contribución . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.7. Organización del documento de Tesis . . . . . . . . . . . . . . 7
2. Cómputo Evolutivo 92.1. Orígenes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2. Algoritmos Evolutivos (AEs) . . . . . . . . . . . . . . . . . . 112.3. Componentes de los AEs . . . . . . . . . . . . . . . . . . . . . 12
2.3.1. Representación . . . . . . . . . . . . . . . . . . . . . . 122.3.2. Función de Aptitud . . . . . . . . . . . . . . . . . . . . 132.3.3. Selección . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.4. Operadores de variación . . . . . . . . . . . . . . . . . 142.3.5. Mecanismos de Reemplazo . . . . . . . . . . . . . . . . 14
2.4. Principales Paradigmas . . . . . . . . . . . . . . . . . . . . . . 142.4.1. Programación Evolutiva(PE) . . . . . . . . . . . . . . 142.4.2. Estrategias Evolutivas (EE) . . . . . . . . . . . . . . . 152.4.3. Algoritmos Genéticos (AGs) . . . . . . . . . . . . . . . 16
3. Optimización 173.1. Conceptos Generales . . . . . . . . . . . . . . . . . . . . . . . 173.2. Optimización Numérica con Restricciones . . . . . . . . . . . 20
ix
x Índice
3.3. Técnicas para el Manejo de Restricciones . . . . . . . . . . . . 213.3.1. Funciones de Penalización(Penalty Functions) . . . . . 213.3.2. Reglas de Factibilidad(Feasibility Rules) . . . . . . . . 223.3.3. Ordenamiento Aleatorio(Stochastic Ranking) . . . . . 233.3.4. ε−constrained method . . . . . . . . . . . . . . . . . . 24
4. Algoritmos Genéticos 254.1. Elementos de un AG . . . . . . . . . . . . . . . . . . . . . . . 25
4.1.1. Representación . . . . . . . . . . . . . . . . . . . . . . 254.1.2. Selección de padres . . . . . . . . . . . . . . . . . . . . 264.1.3. Operadores de Variación . . . . . . . . . . . . . . . . . 274.1.4. Reemplazo . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2. Operadores de Cruza . . . . . . . . . . . . . . . . . . . . . . . 284.2.1. Operadores de Cruza en Representación Binaria . . . . 284.2.2. Operadores de Cruza utilizados en Permutaciones . . . 294.2.3. Operadores de Cruza en Representación Real . . . . . 29
5. Propuesta y Resultados 335.1. Medida de desempeño . . . . . . . . . . . . . . . . . . . . . . 335.2. Diseño Experimental . . . . . . . . . . . . . . . . . . . . . . . 355.3. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 385.4. Resultados obtenidos con BLX-α . . . . . . . . . . . . . . . . 39
5.4.1. Discusión de Resultados BLX-α . . . . . . . . . . . . . 495.5. Resultados obtenidos con SBX . . . . . . . . . . . . . . . . . 50
5.5.1. Discusión de Resultados SBX . . . . . . . . . . . . . . 60
6. Conclusiones 636.1. Conclusiones respecto del operador de cruza BLX-α . . . . . 636.2. Conclusiones respecto del operador de cruza SBX . . . . . . . 646.3. Trabajo Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . 65
I Apéndices 67
A. Apéndice 69A.1. Complemento de los Resultados obtenidos con BLX-α . . . . 69
A.1.1. BLX-α, CEC2006 . . . . . . . . . . . . . . . . . . . . . 70A.1.2. BLX-α, CEC2010 D=10 . . . . . . . . . . . . . . . . . 71
A.2. SBX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74A.2.1. SBX, CEC2006 . . . . . . . . . . . . . . . . . . . . . . 74A.2.2. SBX, CEC2010 D=10 . . . . . . . . . . . . . . . . . . 76
A.3. Resultados de pruebas estadísticas de Friedman. . . . . . . . . 78

Índice xi
A.3.1. Factibilidad en BLX-α . . . . . . . . . . . . . . . . . . 79A.3.2. Factibilidad en SBX . . . . . . . . . . . . . . . . . . . 85
B. Funciones del CEC2006 89
C. Funciones del CEC2010 103
Referencias 109
Índice de �guras
3.1. Espacio de búsqueda restringido. . . . . . . . . . . . . . . . . 21
4.1. Representaciones en AGs. . . . . . . . . . . . . . . . . . . . . 26
4.2. Cruzas en representación binaria . . . . . . . . . . . . . . . . 29
4.3. Operador de Cruza BLX . . . . . . . . . . . . . . . . . . . . 31
4.4. Operador de Cruza SBX [14] . . . . . . . . . . . . . . . . . . 32
5.1. Factibilidad generada por BLX cuando: 2F= dos padres sonfactibles; 2NF= Dos padres son no factibles y 1F-1NF= sólouno de los padres es factible. . . . . . . . . . . . . . . . . . . 40
5.2. Valores del parámetro α con los que se obtuvieron mejoresresultados de factibilidad en funciones del CEC2006. 2F= dospadres son factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . . . 40
5.3. Factibilidad generada por BLX en el CEC2010 D=10 cuan-do: 2F= dos padres son factibles; 2NF= Dos padres son nofactibles y 1F-1NF= sólo uno de los padres es factible. . . . . 42
5.4. Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=10. 2F=dos padres son factibles; 2NF= Dos padres son no factibles y1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . 42
5.5. Factibilidad generada por BLX en el CEC2010 D=30 cuan-do: 2F= dos padres son factibles; 2NF= Dos padres son nofactibles y 1F-1NF= sólo uno de los padres es factible. . . . . 43
5.6. Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=30. 2F=dos padres son factibles; 2NF= Dos padres son no factibles y1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . 44
xiii
xiv Índice de figuras
5.7. BLX. Prueba estadística de Friedman en funciones del CEC2006.Cada línea en la grá�ca representa un valor tomado por el pa-rámetro del operador. El valor del parámetro con el cual seobtuvo mejores resultados de factibilidad aparece en el títulode la grá�ca. Las lineas horizontales en gris claro indican queno existe diferencia signi�cativa entre esos valores del paráme-tro respecto del valor del parámetro con el cual se obtuvieronlos mejores resultados de factibilidad. . . . . . . . . . . . . . . 46
5.8. BLX. Prueba estadística de Friedman en funciones del CEC2010D=10. Cada línea en la grá�ca representa un valor tomadopor el parámetro del operador. El valor del parámetro con elcual se obtuvo mejores resultados de factibilidad aparece enel título de la grá�ca. Las lineas horizontales en gris claro in-dican que no existe diferencia signi�cativa entre esos valoresdel parámetro respecto del valor del parámetro con el cual seobtuvieron los mejores resultados de factibilidad. . . . . . . . 47
5.9. BLX. Prueba estadística de Friedman en funciones del CEC2010D=30. Cada línea en la grá�ca representa un valor tomadopor el parámetro del operador. El valor del parámetro con elcual se obtuvo mejores resultados de factibilidad aparece enel título de la grá�ca. Las lineas horizontales en gris claro in-dican que no existe diferencia signi�cativa entre esos valoresdel parámetro respecto del valor del parámetro con el cual seobtuvieron los mejores resultados de factibilidad. . . . . . . . 48
5.10. Factibilidad generada por BLX en el CEC2006 cuando: 2F=dos padres son factibles; 2NF= Dos padres son no factibles y1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . 51
5.11. Valores del parámetro α con los que se obtuvieron mejoresresultados de factibilidad en funciones del CEC2006. 2F= dospadres son factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . . . 52
5.12. Factibilidad generada por BLX en el conjunto de funciones delCEC2010 D=10 cuando: 2F= dos padres son factibles; 2NF=Dos padres son no factibles y 1F-1NF= sólo uno de los padreses factible. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.13. Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=10. 2F=dos padres son factibles; 2NF= Dos padres son no factibles y1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . 54
5.14. Factibilidad generada por BLX en el conjunto de funciones delCEC2010 D=30 cuando: 2F= dos padres son factibles; 2NF=Dos padres son no factibles y 1F-1NF= sólo uno de los padreses factible. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Índice de figuras xv
5.15. Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=30. 2F=dos padres son factibles; 2NF= Dos padres son no factibles y1F-1NF= sólo uno de los padres es factible. . . . . . . . . . . 55
5.16. SBX. Prueba estadística de Friedman en funciones del CEC2006.Cada línea en la grá�ca representa un valor tomado por el pa-rámetro del operador. El valor del parámetro con el cual seobtuvo mejores resultados de factibilidad aparece en el títulode la grá�ca. Las lineas horizontales en gris claro indican queno existe diferencia signi�cativa entre esos valores del paráme-tro respecto del valor del parámetro con el cual se obtuvieronlos mejores resultados de factibilidad. . . . . . . . . . . . . . . 57
5.17. SBX. Prueba estadística de Friedman en funciones del CEC2010D=10. Cada línea en la grá�ca representa un valor tomadopor el parámetro del operador. El valor del parámetro con elcual se obtuvo mejores resultados de factibilidad aparece enel título de la grá�ca. Las lineas horizontales en gris claro in-dican que no existe diferencia signi�cativa entre esos valoresdel parámetro respecto del valor del parámetro con el cual seobtuvieron los mejores resultados de factibilidad. . . . . . . . 58
5.18. SBX. Prueba estadística de Friedman en funciones del CEC2010D=30. Cada línea en la grá�ca representa un valor tomadopor el parámetro del operador. El valor del parámetro con elcual se obtuvo mejores resultados de factibilidad aparece enel título de la grá�ca. Las lineas horizontales en gris claro in-dican que no existe diferencia signi�cativa entre esos valoresdel parámetro respecto del valor del parámetro con el cual seobtuvieron los mejores resultados de factibilidad. . . . . . . . 59

Índice de Tablas
5.1. Conjunto de funciones del CEC2006. . . . . . . . . . . . . . . 36
5.2. Conjunto de funciones del CEC2010. . . . . . . . . . . . . . . 37
5.3. Con�guración de parámetros en el AG . . . . . . . . . . . . . 37
5.4. BLX-α CEC2006. Porcentajes de Factibilidad obtenidos en lostres casos de estudio. . . . . . . . . . . . . . . . . . . . . . . . 39
5.5. Mejor valor encontrado por BLX-α en las funciones del CEC2006.FX indica el mejor valor encontrado por el operador, α indicael valor del parámetro con el que se obtuvo el mejor valor yÓptimo es el óptimo reportado en la literatura para la función 41
5.6. BLX-α CEC2010 D = 10. Porcentajes de Factibilidad obteni-dos en los tres casos de estudio. . . . . . . . . . . . . . . . . . 41
5.7. BLX-α CEC2010 D = 30. Porcentajes de Factibilidad obteni-dos en los tres casos de estudio. . . . . . . . . . . . . . . . . . 43
5.8. Mejor valor encontrado por BLX-α en las funciones del CEC2010D=10 y D=30. FX indica el mejor valor encontrado por el ope-rador, α indica el valor del parámetro con el que se obtuvo elmejor valor y Óptimo es el óptimo reportado en la literaturapara la función . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.9. SBX CEC2006. Porcentajes de Factibilidad obtenidos en lostres casos de estudio. . . . . . . . . . . . . . . . . . . . . . . . 51
5.10. Mejor valor encontrado por SBX en las funciones del CEC2006.FX indica el mejor valor encontrado por el operador, η indicael valor del parámetro con el que se obtuvo el mejor valor yÓptimo es el óptimo reportado en la literatura para la función. 52
5.11. SBX CEC2010 D=10. Porcentajes de Factibilidad obtenidosen los tres casos de estudio. . . . . . . . . . . . . . . . . . . . 53
5.12. SBX CEC2010 D=30. Porcentajes de Factibilidad obtenidosen los tres casos de estudio. . . . . . . . . . . . . . . . . . . . 54
xvii
xviii Índice de tablas
5.13. Mejor valor encontrado por SBX en las funciones del CEC2010D=10 y D=30. FX indica el mejor valor encontrado por eloperador, η indica el valor del parámetro con el que se obtuvoel mejor valor y Óptimo es el óptimo reportado en la literaturapara la función. . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.1. Valores sugeridos para los operadores de cruza en espacios sinrestricciones y en espacios con restricciones. . . . . . . . . . . 65
A.1. BLX CEC2006. Dos Padres Factibles. . . . . . . . . . . . . . 70
A.2. BLX CEC2006. Dos Padres No Factibles. . . . . . . . . . . . 70
A.3. BLX CEC2006. Un Padre Factible y uno No Factible. . . . . 71
A.4. BLX CEC2010 D=10. Dos Padres Factibles. . . . . . . . . . . 71
A.5. BLX CEC2010 D=10. Dos Padres No Factibles. . . . . . . . . 72
A.6. BLX CEC2010 D=10. Un padre Factible y uno no Factible. . 72
A.7. BLX CEC2010 D=30. Dos Padres Factibles. . . . . . . . . . . 73
A.8. BLX CEC2010 D=30. Dos Padres No Factibles. . . . . . . . . 73
A.9. BLX CEC2010 D=30. Un Padre Factible y uno No Factible. . 74
A.10.SBX CEC2006. Dos Padres Factibles. . . . . . . . . . . . . . . 74
A.11.SBX CEC2006. Dos Padres No Factibles. . . . . . . . . . . . . 75
A.12.SBX CEC2006. Un Padre Factible y uno No Factible. . . . . . 75
A.13.SBX CEC2010 D=10. Dos Padres Factibles. . . . . . . . . . . 76
A.14.SBX CEC2010 D=10. Dos Padres No Factibles. . . . . . . . . 76
A.15.SBX CEC2010 D=10. Un Padre Factible y uno No Factible. . 77
A.16.SBX CEC2010 D=30. Dos Padres Factibles. . . . . . . . . . . 77
A.17.SBX CEC2010 D=30. Dos Padres No Factibles. . . . . . . . . 78
A.18.SBX CEC2010 D=30. Un Padre Factible y uno No Factible. . 78
A.19.BLX CEC2006. Resultados prueba de Friedman aplicados alos resultados de FF. . . . . . . . . . . . . . . . . . . . . . . . 79
A.20.BLX CEC2006. Resultados prueba de Friedman aplicados alos resultados de 2F. . . . . . . . . . . . . . . . . . . . . . . . 80
A.21.BLX CEC2006. Resultados prueba de Friedman aplicados alos resultados de 2NF. . . . . . . . . . . . . . . . . . . . . . . 80
A.22.BLX CEC2006. Resultados prueba de Friedman aplicados alos resultados de 1F-1NF. . . . . . . . . . . . . . . . . . . . . 81
A.23.BLX CEC2010 D=10. Resultados prueba de Friedman apli-cados a los resultados de FF. . . . . . . . . . . . . . . . . . . 81
A.24.BLX CEC2010 D=10. Resultados prueba de Friedman apli-cados a los resultados de 2F. . . . . . . . . . . . . . . . . . . . 82
A.25.BLX CEC2010 D=10. Resultados prueba de Friedman apli-cados a los resultados de 2NF. . . . . . . . . . . . . . . . . . . 82

Índice de tablas xix
A.26.BLX CEC2010 D=10. Resultados prueba de Friedman apli-cados a los resultados de 1F-1NF. . . . . . . . . . . . . . . . . 83
A.27.BLX CEC2010 D=30. Resultados prueba de Friedman apli-cados a los resultados de FF. . . . . . . . . . . . . . . . . . . 83
A.28.BLX CEC2010 D=30. Resultados prueba de Friedman apli-cados a los resultados de 2F. . . . . . . . . . . . . . . . . . . . 84
A.29.BLX CEC2010 D=30. Resultados prueba de Friedman apli-cados a los resultados de 2NF. . . . . . . . . . . . . . . . . . . 84
A.30.BLX CEC2010 D=30. Resultados prueba de Friedman apli-cados a los resultados de 1F-1NF. . . . . . . . . . . . . . . . . 85
A.31.SBX CEC2006. Resultados prueba de Friedman aplicados alos resultados de FF y 2F. . . . . . . . . . . . . . . . . . . . . 85
A.32.SBX CEC2006. Resultados prueba de Friedman aplicados alos resultados de 2NF y 1F-1NF. . . . . . . . . . . . . . . . . 86
A.33.SBX CEC2010 D=10. Resultados prueba de Friedman aplica-dos a los resultados de FF y 2F. . . . . . . . . . . . . . . . . . 86
A.34.SBX CEC2010 D=10. Resultados prueba de Friedman aplica-dos a los resultados de 2NF y 1F-1NF. . . . . . . . . . . . . . 87
A.35.SBX CEC2010 D=30. Resultados prueba de Friedman aplica-dos a los resultados de FF y 2F. . . . . . . . . . . . . . . . . . 87
A.36.SBX CEC2010 D=30. Resultados prueba de Friedman aplica-dos a los resultados de 2NF y 1F-1NF. . . . . . . . . . . . . . 88
B.1. Conjunto de datos para el problema g19 . . . . . . . . . . . . . . 98B.2. Conjunto de datos para el problema g20 . . . . . . . . . . . . . . 99

Capítulo 1
Introducción
Resumen: En este apartado se presenta la introducción al documento
de tesis, se describen los antecedentes y la de�nición del problema a
tratar; se establece el objetivo de la investigación, el planteamiento de
la hipótesis a comprobar, la justi�cación del trabajo, la contribución
dentro del área y por último se presenta la organización del documento
de tesis.
1.1. Antecedentes
Los Algoritmos Evolutivos (AEs) son considerados como métodos de bús-queda, utilizados en la optimización de problemas complejos [47]. Éstos basansu comportamiento en el proceso de evolución natural propuesto por Darwin,donde, el individuo más apto es el que logra sobrevivir y pasar a la siguien-te generación. Existen diferentes tipos de AEs, entre ellos se encuentran: laProgramación Evolutiva propuesta por Fogel en la década de los 60's [20],las Estrategias Evolutivas propuestas por Rechenberg en 1964 [42] y los Al-goritmos Genéticos propuestos por Holland en los 60's [26]. Dependiendo delas características del problema es posible usar la más conveniente [47].
Como se mencionó en el párrafo anterior, dentro de los AEs se encuentranlos Algoritmos Genéticos (AGs). Un Algoritmo Genético (AG) se distinguede los otros paradigmas por sus componentes, entre los cuales se encuentranprincipalmente, las distintas formas para la representación de soluciones yla importancia que da a la cruza como operador principal [22], [15]. Hoy endía existe un gran número de operadores de cruza que pueden ser utilizadoscon un AG. Existen algunos trabajos en los que éstos han sido clasi�cadosde acuerdo a su comportamiento en el espacio de búsqueda y la manera degenerar nuevos descendientes a partir de sus padres [24], [25]. La gran va-riedad de operadores existentes fueron creados para trabajar en espacios sin
1
2 Capítulo 1. Introducción
restricciones y aunque los AGs fueron también inicialmente utilizados pa-ra resolver problemas sin restricciones enfocados al Aprendizaje Automático[22] principalmente, con el paso del tiempo fueron empleados para resolverdiferentes problemas de optimización ya sea restringidos o no [10], [22], [15],[35].
En un espacio restringido existen dos zonas donde es posible generar so-luciones al problema: la factible (lugar donde todas las soluciones satisfacenlas restricciones del problema) y la no factible (espacio donde las solucionesno satisfacen una o más restricciones del problema). Debido a que los opera-dores de cruza, tanto en AGs como en AEs, no fueron diseñados para tratarcon estas condiciones, no controlan de manera determinista si las solucionesque generan sean en la zona factible o en la zona no factible, es decir sonciegos en este sentido, ya que no aseguran que de una solución factible segenere otra factible. Por este motivo, si se requiere utilizar un AE o AG pararesolver esta clase de problemas es necesario utilizar mecanismos adicionalesque permitan un manejo adecuado de las restricciones asociadas al proble-ma. En la actualidad existen diferentes técnicas que permiten a cualquierAE trabajar en espacios restringidos, algunas de ellas se mencionan en lostrabajos de Coello [10], Deb [12] y Mezura [31]. Dependiendo de la técnicaque se utilice y la capacidad del operador para generar soluciones en el áreafactible, el comportamiento de tal operador se convierte en sujeto de análisis,ya que no necesariamente se tiene el mismo comportamiento en un mediosin restricciones que en uno donde si las hay.
Existen actualmente algunos estudios que muestran un análisis del com-portamiento que tiene un operador de cruza dentro de un AG en un problemasujeto a restricciones, entre ellos se encuentran los propuestos por Ortiz etal. [4], [3] y Elsayed [16].
Ortiz et al. en el 2002 [4], presentaron un estudio en el que compararon di-ferentes variantes de AG, cada uno con diferente operador de cruza (BlenderCrossover (BLX-α), Operador de Cruza Basado en Con�dencia de Intervalos,Cruza Aritmética, Cruza Discreta, Cruza Lógica). Cada variante fue probadaen un conjunto de cinco funciones sujetas a restricciones tanto de igualdadcomo desigualdad. El objetivo del experimento fue analizar el desempeño deloperador en este tipo de problemas utilizando el Algoritmo Genético paraProblemas de Optimización Numérica con Restricciones(GENOCOP, por sussiglas en inglés) como técnica para manejar las restricciones. La conclusiónreportada fue que el operador de cruza que tuvo mejor desempeño fue elOperador de Cruza basado en Con�dencia de Intervalos.
Basándose en el estudio del 2002, Ortiz et al. presentaron un experimentomás en el 2005 [3], donde agregaron nuevos operadores de cruza y diferentesmétodos para el manejo de restricciones. Los operadores utilizados fueron:

1.1. Antecedentes 3
cruza aritmética, BLX-α, Cruza Binaria Simulada (SBX, por sus siglas eninglés), Cruza Unimodal (UNDX, por sus siglas en inglés) y Cruza Basada enCon�dencia de Intervalos 2 (CIXL2, por sus siglas en inglés). Para el manejode restricciones utilizaron diferentes técnicas de penalización, las funcionesen las que se probó estaban sujetas a restricciones de igualdad y desigual-dad. El objetivo fue conocer el comportamiento tanto del operador ante esteconjunto de problemas, así como de la técnica utilizada para el manejo delas restricciones. De acuerdo a las conclusiones de los autores, no se observóa una combinación operador-técnica para manejo de restricciones que supe-rara en todos los casos a otras, pero concluyeron que CIXL2 tiene el mejordesempeño en este tipo de problemas usando la penalización de funcionescomo técnica para tratar las restricciones. Existen diferentes técnicas para elmanejo de restricciones para saber más sobre éstas re�erase a la sección 3.3del capítulo 3 y [35], [37], [12], [31], [10].
Elsayed et al.[16] en el 2010, presentaron un estudio parecido al de Ortiz.Sometieron a prueba cinco operadores de cruza: BLX-α, SBX, Cruza Sim-plex(SPX, por sus siglas en inglés), Cruza Centrada en los Padres (PCX,por sus siglas en inglés) y Cruza Triangular (TC, por sus siglas en inglés).y propuso 10 variantes de AG, cinco con mutación no uniforme y cinco conmutación polinomial. Los problemas a los que se sometieron las variantes sonlos publicados en el Congreso de Cómputo Evolutivo del 2010 CEC2010 [32].Además, propusieron una técnica de comparación que les permitió conocerla variante que obtuvo mejor desempeño en todo el conjunto de funcionespresentado, la técnica consistió en asignar un valor de 1.0 a la variante queobtuvo el mejor valor de aptitud en la función actual, 0.0 si falla en generarsoluciones factibles y un valor entre 0.0 y 1.0 es dado si genera solucionesfactibles, pero no obtiene el mejor valor de aptitud en la función y para darmayor con�abilidad en los resultados mostrados, sometieron los resultadosa la prueba estadística de Wilcoxon. Los resultados mostraron que ningunavariante resultó ganadora en todos los problemas, pero si dejan claro paraqué tipo de funciones es más conveniente cierto operador. Sus conclusionesfueron que de todas las variantes, SBX, PCX y TC con mutación no unifor-me son las que mejores resultados obtuvieron en la mayoría de las funciones.
Además de analizar el desempeño �nal del operador de cruza es intere-sante notar que en Problemas de Optimización Numérica Con Restricciones(CNOPs por sus siglas en inglés) para que una solución sea tomada comobuena o como la mejor, ésta debe cumplir con el criterio de factibilidad, esdecir no debe violar ninguna de las restricciones asociadas al problema. Estecriterio se vuelve más difícil cuando el espacio de búsqueda es muy grande yla zona factible es muy pequeña o cuando las zonas factibles son discontinuasen dicho espacio [46],[17],[45].
4 Capítulo 1. Introducción
En un AE la población inicial se genera usualmente de manera aleatoria,si el espacio no factible es más grande que el factible, es muy probable que lamayoría de las soluciones generadas se queden en la zona no factible y muypocas o ninguna se encuentre en la zona factible. Dado que las solucionesque buscamos deben ser factibles y que el AE intentará encontrarlas al pasode las generaciones, surgen trabajos en los cuales se busca guiar al AE haciala zona factible o ayudarlo cuando la zona factible es muy reducida [17],[45];además existen técnicas que se usan antes de iniciar el proceso de evolucióndel AE, dichas técnicas permiten explorar el espacio de búsqueda y llegar ala zona factible, una vez que se encuentran soluciones factibles, éstas sirvenal AE para mejorar la búsqueda en el paso de cada generación [46]. Algunostrabajos y técnicas se mencionan a continuación:
En el 2008, Barkat Ullah et al.[46], presentaron un trabajo en el queintrodujeron la técnica SSRT (Search Space Reduction Technique) con elobjetivo de guiar la búsqueda del AE hacia la zona factible. Los autoresevolucionaron un sistema de agentes a través de un AE, cada individuo loconstituye un agente del sistema. Utilizaron la técnica propuesta antes deiniciar el proceso de evolución del AE, al generar la población inicial veri�canel nivel de factibilidad de la población, si éste es menor al 5% se aplica latécnica para ayudar al AE a mejorar su desempeño. El operador de cruzaque utilizaron en su investigación fue SBX, y concluyeron que el algoritmotiene mejor rendimiento cuando se ocupa la técnica SSRT en la poblacióninicial.
Elsayed et al. en el 2012 [17], dieron a conocer un estudio donde de-muestran la importancia de contar con soluciones factibles en la poblacióninicial. Utilizaron un AE de Evolución Diferencial para resolver un conjuntode problemas bien conocidos en el área. Llevaron a cabo 5 experimentos, encada experimento hicieron variaciones con el porcentaje de soluciones facti-bles en la población inicial, las variaciones seleccionadas fueron del 0%, 1%,5%,10%,15% hasta el 20% de soluciones factibles en la población inicial.En cada experimento probaron el desempeño �nal del AE, el tiempo de eje-cución, diversidad del AE, entre otros. Como conclusión obtuvieron que, senecesita al menos tener un 5% de factibilidad en la población inicial paraobtener mejores resultados en el AE.
Dada la importancia de la factibilidad dentro de la solución de CNOPs,además de analizar el desempeño �nal del operador dentro del AG en estaclase de problemas, este trabajo de tesis propone también analizar la capa-cidad que tienen dos operadores de cruza para generar soluciones factiblesvariando el valor de sus parámetros. Toda la propuesta se detalla en el Ca-pítulo 5

1.2. De�nición del Problema 5
1.2. De�nición del Problema
El problema de interés a resolver en esta tesis pertenece al tipo de pro-blemas no lineales (NLP por sus siglas en inglés), el cual sin perdida degeneralidad puede de�nirse como sigue:
Minimizarf(~x) (1.1)
Sujeta a:
gi(~x) <= 0; i = 1, 2, . . . ,m
hj(~x) = 0; j = 1, 2, . . . , p
dónde f(~x) es la función objetivo, gi(~x), i = 1, . . . ,m es el conjunto de res-tricciones de desigualdad, hj(~x), j = 1, . . . , p es el conjunto de restriccionesde igualdad ~x = [x1, x2, . . . , xn] es el vector que contiene las variables dedecisión del problema, donde cada xk, k = 1, . . . , n es delimitada por unlimite inferior Lk y un límite superior Uk, Lk ≤ xk ≤ Uk. Dichos límitesde�nen el espacio de búsqueda S y las soluciones que satisfacen el conjuntode restricciones de igualdad y desigualdad de�nen la región factible F ⊆ S.Esta clase de problemas serán a los que se enfrenten los operadores de cruza yson éstos en los que se analizará su comportamiento. Dado que, originalmen-te los problemas a resolver no estaban restringidos y su trabajo sólo consistíaen optimizar la función f(~x), ahora, es necesario que el vector solución satis-faga las restricciones asociadas a la función,es decir, que sea factible, ademásde optimizarla. Esta situación es la que lleva a analizar el comportamientodel operador en este tipo particular de problemas de optimización, así co-mo, conocer su capacidad para generar soluciones factibles y conservar elporcentaje de factibilidad adquirido.
1.3. Objetivos
1.3.1. Objetivo General
Realizar un estudio empírico de dos operadores de cruza para AGs conrepresentación real, BLX-α [18] y SBX [13], en Problemas de OptimizaciónNumérica con Restricciones, considerando su capacidad para generar solu-ciones factibles y resultados �nales.
1.3.2. Objetivos Especí�cos
Implementar los operadores de cruza BLX-α y SBX con representaciónreal.

6 Capítulo 1. Introducción
Diseñar una medida de desempeño que permita analizar la capacidaddel operador para generar soluciones factibles.
Diseñar experimentos que provean evidencia clara y sólida del desem-peño de los operadores.
1.4. Hipótesis
El comportamiento de los operadores de cruza BLX-α y SBX en Proble-mas de Optimización Numérica con Restricciones, no es igual, con respecto asus valores de parámetros sugeridos, al que muestran resolviendo Problemasde Optimización Numérica sin Restricciones.
1.5. Justi�cación
Como se mencionó en la sección de antecedentes, existen ya algunos tra-bajos realizados [4], [3], [16] referentes al análisis del comportamiento deoperadores de cruza en AG resolviendo problemas con restricciones. Estosestudios, parten de analizar el desempeño del mismo AG con diferente opera-dor de cruza en esta clase de problemas. Toman los resultados obtenidos porel AG y determinan cual operador alcanza mejores valores para el conjuntode funciones a optimizar. Al basar sus conclusiones en los resultados �nalesreportados por el AG, no miden la aportación del operador al desempeño�nal del AG y no toman en cuenta los parámetros de cada operador. Tomancomo referencia los valores reportados en la literatura para los parámetrosde los operadores, sin considerar las condiciones diferentes en esta clase deproblemas restringidos, en los cuales el comportamiento del operador puedeser diferente.Otro punto a considerar es el aspecto de factibilidad que debe ser satisfechopara que una solución sea aceptada como óptima. Los trabajos anterioresomiten este análisis en cada uno de los operadores, por lo que resulta de in-terés analizar la capacidad que tiene el operador para conservar las solucionesfactibles que ya alcanzó o analizar su capacidad para permanecer o salirse dela zona factible y, �nalmente, determinar el porcentaje de soluciones factiblesobtenido cuando la zona factible es muy pequeña.
En este trabajo se presenta un análisis del comportamiento de dos ope-radores de cruza, BLX-α y SBX, en AG resolviendo problemas con restric-ciones. Se analizará el comportamiento del operador variando los valores desus parámetros para saber con qué valores provee mejor aporte al desempeño�nal del AG. Se establecerá una medida de desempeño que permita analizarla capacidad del operador para generar soluciones factibles y se validarán es-tadísticamente los resultados obtenidos. Los operadores resolverán conjuntosde funciones publicadas en la literatura especializada en el área, como lo son

1.6. Contribución 7
CEC2006 [30] y CEC2010 [32].
La razón del porqué se utilizaron estos dos operadores de cruza para llevara cabo este estudio recae en primer grado a la facilidad de su implementación,ya que son operadores cuya implementación no requiere de grandes cálculosni de nociones de matemáticas avanzadas. Otro motivo recae en que sonoperadores bastante utilizados en el área ofreciendo buenos resultados [46],[8],[24], [48], [33],[16].
1.6. Contribución
La contribución aportada por este trabajo consiste en generar:
El primer estudio empírico para determinar el comportamiento de
dos operadores de cruza en Algoritmos Genéticos para Problemas
de Optimización Numérica con Restricciones, y diferenciarlo del
comportamiento en espacios no restringidos. Por otro lado, se
propone una medida de desempeño que permite analizar la
capacidad de los dos operadores para generar soluciones factibles.
1.7. Organización del documento de Tesis
El documento de tesis está conformado de seis capítulos, incluyendo elpresente, que se resumen a continuación:
Capítulo 2. Cómputo Evolutivo. Se presentan los conceptos básicosdel cómputo evolutivo, los diferentes paradigmas que lo conforman, entreellos los AGs, en los cuales se hará énfasis por ser parte central de este estu-dio.Capítulo 3. Optimización. Se presentan los conceptos básicos de optimi-zación con y sin restricciones, además de las diferentes técnicas utilizadaspara el manejo de restricciones.Capítulo 4. Algoritmos Genéticos. Se presentan los conceptos básicos delos AGs, las diferentes representaciones utilizadas y los pasos necesarios paraimplementarlo. También se mencionan algunos de los diferentes operadoresde cruza utilizados en diferentes representaciones y termina haciendo énfasisen los dos operadores de cruza utilizados en este trabajo.Capítulo 5. Propuesta y Resultados. Se describe de manera detalladala propuesta del trabajo de tesis, así como el diseño de cada experimento yla calibración de parámetros para el AG, además, se detalla la forma en quelos resultados serán presentados, se dan a conocer los resultados obtenidosde cada experimento con cada operador de cruza y se presenta la discusiónde los mismos

8 Capítulo 1. Introducción
Capítulo 6. Conclusiones. Se exponen las conclusiones alcanzadas por elestudio presentado y de acuerdo a éstas, se plantean los trabajos futuros allevar a cabo.
Capítulo 2
Cómputo Evolutivo
Resumen: En este capítulo se dan a conocer de manera general los
orígenes del Cómputo Evolutivo (CE). Se presentan los conceptos más
importantes, sus principales paradigmas y se da una breve introducción
a los Algoritmos Evolutivos (AEs).
2.1. Orígenes
En su libro �El Origen de las Especies� [11] Darwin da a conocer suteoría de la Evolución y selección natural, la cual basa su comportamientoen el concepto de población. En dicha teoría se menciona que el alto nivelde reproducción entre individuos de la población hace que los recursos seaninsu�cientes para mantener el equilibrio de la misma. Este motivo hace queexista una competencia por la adquisición de los recursos, lo cual conlleva ala supervivencia del individuo con mejores características para adaptarse almedio por el que compite.
En su teoría del germoplasma Leopold August Weismann [6] niega quelas características adquiridas por los nuevos individuos sean transmitidasen una sola generación y que además, las deformaciones u otros cambiosadquiridos por la acción del ambiente no tienen porque ser transmitidas asu descendencia. Él a�rma que las características del nuevo individuo sontransmitidas a través del plasma germinal y éstas determinan al nuevo ser.Además menciona que dicho plasma continúa vivo durante muchas genera-ciones y, por lo tanto, es posible que reaparezcan en los nuevos individuoscaracterísticas que estuvieron en sus antepasados. Es así como invalida lasteorías de Lamark [28], el cual decía que las características de un individuoeran directamente heredadas a la nueva descendencia.
Johann Gregor Mendel por los años 1860s [34] realiza una serie de ex-perimentos con plantas de chícharos. A partir de los resultados obtenidos,
9
10 Capítulo 2. Cómputo Evolutivo
descubre lo que más tarde se conocerían como las leyes de la herencia o Le-yes de Mendel. En ellas establece la existencia de genes dominantes y genesrecesivos y cómo éstos se comportan al momento de ser transmitidos a losnuevos descendientes.
Al conjuntarse la teoría del germoplasma de Weismann, las leyes de Men-del y la teoría de la evolución natural de Darwin, surge lo que se conoce comoNeo-Darwinismo. Éste intenta explicar la vida en la tierra a partir de cuatrofases [19] que son:
Reproducción. Consiste en crear nuevos individuos a partir de otrosmiembros existentes.
Mutación. Errores durante la transmisión de la información pueden sur-gir, lo cual resulta necesario en la población, así, pequeñas variacionesen los genes de los individuos podrían generar cambios signi�cativosen sus características.
Competencia. Surge como consecuencia del crecimiento sin control dela población. Es una forma de medir la capacidad del individuo parapermanecer en la población.
Selección. Aparece como la consecuencia de la competencia. Los indi-viduos mejor adaptados al ambiente serán los que tengan más posibili-dades de permanecer en la población y en las siguientes generaciones.
Dadas las características del Neo-Darwinismo, se puede ver a la evolu-ción como un proceso de optimización, en el cual el proceso de selecciónestá llevando a los individuos a tener cada vez mejores características paraadaptarse al ambiente. Al tratar de simular este comportamiento natural enun programa de computadora [19], surge lo que se conoce como CómputoEvolutivo (CE).
El CE usa el concepto de evolución de la población para resolver princi-palmente problemas de optimización. Para dar solución a tales problemas serequieren de 5 pasos [36], los cuales harán posible la simulación del procesode evolución en una computadora.
1. Representación de las soluciones al problema (individuos que confor-marán la población).
2. Una forma para generar la población inicial, generalmente se hace deforma aleatoria.
3. El ambiente en el cual se moverán las soluciones o individuos. Esteambiente se representa por una función de aptitud, la cual permitiráconocer la aptitud de cada individuo.
2.2. Algoritmos Evolutivos (AEs) 11
4. Operadores de reproducción o variación que permitan generar nuevosindividuos. A estos operadores se les conoce como cruza y mutación.
5. Valores propios para calibrar el tamaño de la población, el porcentajede cruza y mutación, el número de generaciones que evolucionará lapoblación, etc.
La simulación de estos pasos dan como resultado un programa de compu-tadora, conocido como Algoritmo Evolutivo (AE).
2.2. Algoritmos Evolutivos (AEs)
Un AE es un método de búsqueda que simula el proceso de evoluciónpropuesto por Darwin. Son utilizados principalmente para resolver proble-mas de optimización numérica complejos, en los cuales no es posible utilizarmétodos clásicos debido a que el espacio de búsqueda es muy grande, no secuenta con un punto de partida inicial o el problema es demasiado complejo[15], [22], [36], [47]. Un AE es estocástico debido al uso de técnicas probabi-listas durante el proceso de evolución [35]. Aunque un AE no asegura que sellegará a la solución óptima, si garantiza que se tendrán soluciones compe-titivas en un tiempo aceptable. Además de eso, lo que hace atractivos a losAlgoritmos Evolutivos es que pueden ser aplicados a problemas de diferentesáreas sin requerir cambios en su modelo fundamental.
Los pasos necesarios para resolver un problema mediante un AE se des-criben a continuación [27].
1. Inicialización. Generar una población aleatoria de N individuos, loscuales representan soluciones potenciales al problema. (N >0).
2. Selección. Seleccionar los mejores individuos de la población de acuerdoal valor de la función de aptitud.
3. Aplicar los operadores de variación (cruza, mutación) para generarnuevos individuos a partir de los elementos seleccionados en el pasoanterior.
4. Escoger, de entre la población original y la descendencia, a los indivi-duos que sobrevivirán para la siguiente generación.
5. Iterar hasta que se cumpla una condición de paro.
Cada iteración en un AE, se le conoce como generación. La condición deparo puede ser el máximo de generaciones permitidas al AE para completarel proceso de evolución, encontrar el valor buscado para la función de aptitud(cuando éste es conocido) o alguna otra condición propuesta por el usuario.
12 Capítulo 2. Cómputo Evolutivo
Los AEs trabajan sobre un conjunto de puntos, cada punto conforma loque se conoce como individuo o solución, a cada individuo se le calcula elvalor de aptitud, el cual será usado en el proceso de selección. Al conjuntode individuos se le llama población. Una vez que la población inicial es gene-rada, se encierra en un ciclo y se empieza a iterar hasta que se cumpla unacondición de paro. Dentro del ciclo se evalúan los individuos de la poblacióny se hace la selección de aquellos individuos que tengan mejor valor de apti-tud, los individuos seleccionados se convertirán en padres a los cuales se lesaplicará un operador de variación, ya sea de cruza o mutación para obtenerlos descendientes. Posterior a este paso se hará una selección de los indivi-duos que pasarán a la siguiente generación, a este paso se le conoce comoreemplazo y puede ser desde generacional, donde los descendiente reempla-zan a toda la población inicial o seleccionar de los descendientes sólo aquéllosque sean mejores que la población inicial. Los individuos con mejor valor deaptitud tienen mayor probabilidad de ser seleccionados como sobrevivientesen futuras generaciones.
2.3. Componentes de los AEs
Los principales componentes de un AE se presentan a continuación.
2.3.1. Representación
Para dar solución a problemas por medio de la computadora, en lo prime-ro que hay que pensar es en su representación, de tal manera que la máquinasea capaz de procesar la información y dar resultados con�ables. En un AE,una posible solución es representada generalmente a través de un vector oarreglo de variables. A este vector se le conoce como cromosoma. Un cromo-soma está formado por variables a las cuáles se les conoce como gene y alvalor que representa cada variable se le conoce como alelo.
Existen dos niveles de Representación dentro de AE: genotipo y fenotipo.En el genotipo se codi�ca el cromosoma y sus genes. Existen diferentes tiposde codi�cación entre ellas, las principales son:
Binaria.
Números Enteros.
Números Reales.
Permutaciones.
En el fenotipo se da paso a la decodi�cación del cromosoma y obtener losvalores de las variables que darán solución al problema planteado.

2.3. Componentes de los AEs 13
2.3.2. Función de Aptitud
La función de aptitud representa el ambiente en el que se moverán losindividuos que conforman la población, representa también el problema aresolver, además, permite medir qué tan bueno es un individuo respecto deotro y es a través de ella que se puede medir la calidad del individuo dentrode la población. También se le conoce como función objetivo.
2.3.3. Selección
Proceso mediante el cual se seleccionan a los mejores individuos de lapoblación, tomando en cuenta su valor en la función de aptitud. Este paso esel encargado de guiar la búsqueda hacia mejores soluciones. Generalmente,los individuos seleccionados serán a los que se les aplicarán los operadoresde reproducción o variación, la idea general es generar mejores individuos,con mejores características para adaptarse al ambiente. Existen diferentestécnicas para llevar a cabo la selección, entre ellas están:
Selección proporcional [23], [27]. Basa la selección en el aporte del valorde aptitud individual al total del valor de aptitud de la población. Enesta categoría están:
1. La Ruleta [29].
2. Sobrante Estocástico con y sin reemplazo [9].
3. Universal estocástico [5].
4. Muestreo Determinístico [29].
Selección por torneo [2],[27]. Consiste en hacer competencias entre unnúmero de individuos seleccionados de forma aleatoria de la población.Los individuos seleccionados participan en el torneo y el ganador seráel seleccionado. Hay dos tipos: Probabilista y Determinista.
la selección por torneo ejerce una presión de selección mayor que la selecciónproporcional. Hay menor posibilidad de que un individuo con un valor deaptitud no tan bueno sea seleccionado para transmitir sus genes a siguien-tes generaciones. Este punto es importante debido a que dependiendo de latécnica utilizada, se favorecerá a la diversidad dentro de la población. Ladiversidad permite al AE explorar la mayor parte del espacio de búsqueda,así que, a mayor diversidad existe mayor seguridad de encontrar la mejor so-lución al problema planteado. Por otro lado, es necesario que el AE converjaen el menor tiempo posible y que en ese tiempo encuentre la mejor solución.Para que el AE converja es necesario que al paso de las generaciones se va-ya disminuyendo la diversidad en la población y todas las soluciones seanguiadas hacia un solo punto. Por lo tanto, debe haber un equilibrio entre ladiversidad permitida dentro de la población en el proceso de evolución y sucapacidad para converger.
14 Capítulo 2. Cómputo Evolutivo
2.3.4. Operadores de variación
Son los encargados de transmitir las características genéticas de los in-dividuos seleccionados en el paso previo (padres) a los nuevos individuosgenerados a partir de estos últimos. Los principales operadores utilizados enel área son:
Cruza: Encargado de combinar los genes de los padres y generar nuevosindividuos a partir de dicha información. Entre los más utilizados setienen [15]:
1. Cruza de un punto.
2. Cruza de dos puntos.
3. Cruza uniforme.
Dependiendo la representación utilizada en el AE, es posible manejarotros operadores de cruza [15].
Mutación: Permite hacer pequeñas variaciones a los genes del nuevoindividuo dando origen a uno diferente para favorecer la diversidad.
2.3.5. Mecanismos de Reemplazo
Generalmente en un AE, en cada generación se genera una nueva pobla-ción, la cual reemplazará a la población de la generación anterior, lo que seconoce como reemplazo generacional. Puede ser que los mejores individuosde la nueva reemplace a los peores de la anterior o se seleccionen al azarlos que serán reemplazados. El criterio lo elige el usuario dependiendo elcomportamiento deseado. Normalmente toda la población se sustituye porla nueva.Algunos de los componentes vistos de manera general en este capítulo sonmencionados con mayor detalle en el Capítulo 4.
2.4. Principales Paradigmas
Existen diferentes paradigmas en CE, los más conocidos son:
2.4.1. Programación Evolutiva(PE)
Fue propuesta por Fogel en los 1960's [20]. Esta técnica simula la evo-lución a nivel de las especies, por lo tanto no existe operador de cruza yaque individuos de diferentes especies no pueden cruzarse y tiene a la muta-ción como operador principal. La técnica de reemplazo se basa en el torneoestocástico. Fue creada para trabajar con diversas representaciones. El Al-goritmo 1 muestra el código general de la Programación Evolutiva.

2.4. Principales Paradigmas 15
Algoritmo 1 Programación Evolutiva.
1: Generar aleatoriamente una población de soluciones.2: Calcular la aptitud de la población inicial.3: Mientras no se cumpla una condición de paro Hacer4: Aplicar la mutación a toda la población para crear hijos.5: Evaluar cada hijo.6: Seleccionar (mediante torneos estocásticos) los individuos de la proxi-
ma generación.7: Fin Mientras
2.4.2. Estrategias Evolutivas (EE)
Esta técnica fue propuesta por Ingo Rechenberg, Hans-Paul Schwefel andPaul Bienert [7] en 1964. Simula la evolución a nivel individuo, por lo tan-to existe operador de cruza, aunque es utilizado en segundo lugar. Le damás importancia al operador de mutación, la cual se basa en la distribuciónGaussiana. Los valores de la mutación varían con el tiempo y son autoadapta-tivos. La representación fenotípica puede ser utilizada. Utiliza un reemplazodeterminista y extintivo, por lo tanto el individuo de menor aptitud nuncaserá seleccionado. Existen diferentes versiones de EE, la versión inicial es la(1+1), la cual indica que un padre será mutado para generar un sólo hijo, siel hijo es mejor que el padre, el hijo reemplaza al padre. El signo + indica eltipo de reemplazo, en este caso que de entre el padre y el hijo se seleccionaráal mejor. Otro tipo de selección se representa por la coma, (,), la cual indicaque de los hijos generados se tomará al mejor y éste reemplazará al padre. Elprimer término de la expresión de izquierda a derecha, en este caso 1, indicael total de los padres seleccionados de la población y el segundo términoindica el número de hijos generados. Otras versiones de EE son (µ,λ)-EE,(µ,1)-EE, (1,λ)-EE. El Algoritmo 2 muestra el código general de una EE.
Algoritmo 2 Estrategia Evolutiva.
1: Generar aleatoriamente una población de soluciones.2: Calcular la aptitud de la población inicial.3: Mientras no se cumpla una condición de paro Hacer4: Seleccionar dos o más padres aleatoriamente.5: Aplicar la cruza para crear hijos(Opcional).6: Aplicar el operador de mutación a todos hijos.7: Evaluar cada hijo.8: Seleccionar los mejores individuos(�+� ó �,� para la próxima generación
basándose en su aptitud ).9: Fin Mientras

16 Capítulo 2. Cómputo Evolutivo
2.4.3. Algoritmos Genéticos (AGs)
Propuestos por John Holland en los 1960's [26], trabajan a nivel genoti-po, por lo tanto, es necesario elegir una forma de codi�cación o representa-ción. Simulan la evolución a nivel individuo y la cruza sexual es su principaloperador, quedando la mutación en segundo término. Fueron desarrolladosprincipalmente para resolver problemas de Aprendizaje Automático [22]. Ori-ginalmente eran codi�cados en forma binaria, pero tienen la capacidad depoder utilizar una gran gama de formas de codi�cación. El proceso de se-lección usa técnicas probabilistas, se recomienda usar elitismo al momentode hacer el reemplazo para conservar la mejor solución generada hasta elmomento. El Algoritmo 3 muestra el código general de un AG.
Algoritmo 3 Algoritmo Genético.
1: Generar una población de soluciones de forma aleatoria NP.2: Evaluar toda la población.3: Mientras no se cumpla una condición de paro Hacer4: Seleccionar NP padres aplicando alguna técnica de selección.5: Aplicar Operadores de Variación a los padres seleccionados para gene-
rar NP descendientes.6: Evaluar a los NP descendientes.7: Aplicar reemplazo generacional.8: Fin Mientras
NOTA: El reemplazo generacional por lo regular se aplica con elitismo paraconservar la mejor solución hasta el momento.

Capítulo 3
Optimización
Resumen: La optimización se hace presente en la mayor parte del
quehacer humano, pues es común, por ejemplo, hacer todo lo posible
por obtener mejores ingresos, mejores precios y hacer más tareas en
el menor tiempo posible. En este capítulo se da a conocer de manera
general en qué consiste la optimización y algunas clasi�caciones de los
problemas derivados de ésta, así como de los métodos empleados para
obtenerla.
3.1. Conceptos Generales
Los tiempos cambian y con ello el ritmo de la vida también. Desde losprincipios de la humanidad, surge la necesidad de mejorar las técnicas parala obtención de alimentos, mejorar las técnicas de caza y recolección y porsupuesto, mejorar las tácticas de guerra para poder ganar las batallas contrael enemigo. En la actualidad, la mayoría requiere obtener mejores resultadosen sus actividades en el menor tiempo posible, obtener mejores ingresos ymenores egresos. En todo lo anterior se habla de algo en común y consisteen obtener lo mejor de algo. Al hablar de mejor o peor, máximos y mínimos,es posible englobar esos términos en el concepto de optimización.
La optimización consiste en obtener los mejores resultados de algo, en untiempo razonable [41]
De acuerdo a Andreas Antoniou [1], se puede hablar de la parte teóricade la optimización, en la cual se encuentran los estudios cuantitativos acercade óptimos y los métodos para encontrarlos. Por otro lado, se habla de opti-mización práctica, en la cual encontramos la colección de técnicas, métodos,procedimientos y algoritmos que pueden ser usados para encontrar el óptimo.
Existen diferentes ramas en la cuales se hace uso de la optimización,entre ellas se encuentra la Física, Matemáticas y la Ingeniería [1]. Cada una
17
18 Capítulo 3. Optimización
de éstas requiere obtener las mejores soluciones en cada uno de sus procesos.Pero la mayor motivación se da en el ámbito empresarial, donde se requierenproductos con la mejor calidad a un menor costo, trabajores con mayorrendimiento en tiempos más cortos y por lo tanto, mejores ganancias entiempos razonables.
La optimización se puede aplicar a cualquier área de la vida, pero mejoraún cuando los problemas que se requiere resolver presentan un conjunto desoluciones posibles, es entonces donde la optimización entra en acción paratratar de encontrar el mejor valor de dicho conjunto [1]. Es muy probable queno siempre se encuentren los mejores resultados, de ser así, la optimizaciónpermitirá obtener valores aproximados que satisfagan de la mejor manera elproblema planteado. En un espacio donde el conjunto de soluciones posibleses vasto, se puede hablar de óptimos locales y óptimos globales. Al hablarde óptimos locales, se hace referencia a aquéllas soluciones que aunque sonbuenas, no se consideran las mejores. Al hacer referencia a óptimos globalesse está en condiciones de decir que se encontró la mejor solución de todo elconjunto, es decir, no existe otra mejor a ésta [1], [41].
Andreas Antoniou, presenta diferentes métodos para aplicar optimiza-ción, entre ellos están:
1. Métodos Analíticos.
2. Métodos Grá�cos.
3. Métodos Experimentales.
4. Métodos Numéricos.
Los Métodos Analíticos se basan en técnicas de calculo diferencial. Inten-tan maximizar o minimizar los valores de una función aplicando técnicas dederivadas.
Los Métodos Grá�cos consisten en gra�car la función a maximizar ominimizar con el objetivo de encontrar el valor buscado. Este método resultaútil cuando el número de variables es menor a o igual a dos, cuando estenúmero es rebasado resulta difícil su aplicación.
En los métodos experimentales las variables del problema son ajustadasuna a la vez hasta obtener resultados prometedores. Es probable obtenerbuenos resultados cuando las variables son independientes entre sí, de locontrario no es recomendable.
El método más utilizado tiene su base en la programación matemática.En los métodos numéricos se itera con las variables del problema hasta quese encuentran conjuntos de soluciones óptimos, o hasta que la varianza enlas variables es mínima de acuerdo a cierto criterio establecido.
Dentro de la programación matemática se encuentran los siguientes mé-todos:

3.1. Conceptos Generales 19
1. Programación Lineal
2. Programación Entera
3. Programación Cuadrática
4. Programación No Lineal
5. Programación Dinámica.
Un problema de optimización clásica consiste en encontrar el mejor valor,o un conjunto de valores que satisfagan al máximo el problema presentadoen el menor tiempo posible. También, al hablar de optimización, nos referi-mos a obtener ya sea los máximos o mínimos que satisfacen una función oproblema. En este trabajo hablaremos de obtener los mínimos de la función.Matemáticamente, se puede expresar un problema de optimización numéricade la siguiente manera:
Obtener
~x
que minimice
f(~x) (3.1)
donde:
~x = [x1, x2, . . . , xn]T
~x es el vector que contiene las variables del problema y f(~x) es la función aoptimizar, también conocida como la función objetivo.
Existen métodos que permiten obtener los mínimos o máximos de la fun-ción objetivo en tiempos razonables [1], [41], la e�cacia de estos métodos esque prometen encontrar la mejor solución al problema planteado. Si algunode los métodos existentes es aplicable al problema, lo mejor es usarlo, ya queésto asegura que se obtendrá el óptimo que se está buscando. Cuando unode estos métodos encuentra la mejor solución se dice que es un método oalgoritmo exacto. Si el problema que se quiere optimizar no admite ningunode los métodos existentes, ya sea porque existen muchas posibles soluciones,no se tiene un punto inicial, se tarda mucho tiempo en arrojar una solución,el espacio de búsqueda es muy grande, o alguna otra circunstancia, entoncesse puede probar algunas otras alternativas que permitan obtener la mejorsolución, aunque esta última no sea la óptima, pero se asegura que se ten-drán buenos resultados en tiempos razonables. Dichas técnicas alternativasse presentan como heurísticas y meta-heurísticas, donde dentro de este tipode algoritmos también llamados �aproximados� se encuentran los AEs.
20 Capítulo 3. Optimización
3.2. Optimización Numérica con Restricciones
La optimización es aplicada a resolver diferente clases de problemas comopueden ser sujetos a restricciones y problemas no restringidos. En el caso deespacios restringidos, el vector ~x, además de optimizar la función objetivo,debe también asegurarse de cumplir con cada una de las restricciones aso-ciadas al problema, es decir, si el óptimo es encontrado por el vector ~x, peroéste viola alguna de las restricciones asociadas al problema, entonces, dichoóptimo no es de utilidad para el problema propuesto.
Un problema de optimización con restricciones puede formularse mate-máticamente de la siguiente manera:
Minimizar
f(~x) (3.2)
Sujeta a:
gi(~x) <= 0; i = 1, 2, . . . ,m
hj(~x) = 0; j = 1, 2, . . . , p
donde f(~x) es la función objetivo, gi(~x), i = 1, . . . ,m es el conjunto de res-tricciones de desigualdad, hj(~x), j = 1, . . . , p es el conjunto de restriccionesde igualdad ~x = [x1, x2, . . . , xn] es el vector que contiene las variables dedecisión del problema, donde cada xk, k = 1, . . . , n es delimitada por unlimite inferior Lk y un límite superior Uk, Lk ≤ xk ≤ Uk. Dichos límitesde�nen el espacio de búsqueda S y las soluciones que satisfacen el conjun-to de restricciones de igualdad y desigualdad de�nen la región factible F ⊆ S.
En optimización restringida, el espacio de búsqueda se encuentra divididoen dos zonas, la factible y la no factible. Para que una solución sea tomadacomo factible debe estar precisamente en la zona factible. Las solucionesfactibles son aquéllas que no violan ninguna de las restricciones asociadasal problema. Una solución es no factible cuando viola al menos una de lasrestricciones asociadas al problema a optimizar [21]. La Figura 3.1 muestragrá�camente el espacio de búsqueda donde es posible visualizar las dos zonas.

3.3. Técnicas para el Manejo de Restricciones 21
Figura 3.1: Espacio de búsqueda restringido.
Los AEs han sido utilizados para resolver este tipo de problemas [21], [37],sin embargo, originalmente no contaban con los mecanismos necesarios paratratar las restricciones [31], [37], por lo tanto, al ser utilizados en esta clasede problemas se vio en la necesidad de hacer uso de técnicas que permitieranel manejo de restricciones. Las técnicas más populares para el manejo derestricciones en AEs se presentan en el siguiente apartado.
3.3. Técnicas para el Manejo de Restricciones
La literatura especializada reporta que ninguna técnica para el manejode restricciones resulta óptima para todos los problemas [37],[21], esto sedebe a que cada problema tiene características especiales, por lo tanto, sien cierta clase de problemas alguna técnica tiene buenos resultados es muyprobable que para otro conjunto de problemas con características diferentesla misma técnica no se comporte de manera adecuada, a esta situación sele conoce de manera general como teorema del no free lunch, de ahí que losinvestigadores se han dado a la tarea de crear nuevas técnicas que haganmás fácil y más e�ciente su manejo en los problemas a optimizar. Algunasde ellas se mencionan a continuación.
3.3.1. Funciones de Penalización(Penalty Functions)
Esta técnica consiste en transformar un problema restringido en uno norestringido. Ésto lo hace penalizando aquéllas soluciones que no pertenecena la zona factible. La función donde se aplica esta técnica se muestra a

22 Capítulo 3. Optimización
continuación.
φ(~x) = f(~x) + p(~x) (3.3)
Donde:φ(~x) es la función objetivo expandida a ser optimizada, f(~x) es la funciónobjetivo original, y p(~x), es el valor de penalización que se sumará a la funciónobjetivo(asumiendo minimización, pues para el caso de maximización el valorse resta). El valor de penalización, puede calcularse de la siguiente forma:
p(~x) =m∑i=1
ri ·max(0, gi(~x))2 +p∑j=1
cj · |hj(~x)| (3.4)
Dónde:ri y cj son conocidos como factores de penalización.
Una función de penalización decrementa la aptitud de las soluciones nofactibles, favoreciendo en el proceso de selección a aquellas que no violanrestricciones o las que las violan en menor cantidad. Cabe aclarar que lo difícilde este método es la calibración de los factores de penalización. Un valor muygrande o muy pequeño de éstos impacta directamente en el desempeño delAE [10]. Si el factor de penalización es muy grande puede ser que rápidose mueva hacia la zona factible y tenga convergencia prematura, y al existirzonas factibles disjuntas existe la posibilidad de que se quede atrapado en laprimer zona que visitó y no explore ninguna otra. Por otro lado, si el factores muy pequeño, puede pasar mucho tiempo explorando la zona no factibley no llegar a encontrar soluciones factibles.
Existen diferentes variantes que manipulan los factores de penalizaciónde diferentes maneras, para saber más sobre ello el lector puede dirigirse a[21], [10].
3.3.2. Reglas de Factibilidad(Feasibility Rules)
Fueron propuestas por K. Deb [12], en el 2002. El auge de esta técnica sedebe principalmente a que puede ser adaptada a diferentes variantes de AEssin necesidad de aumentar el número de parámetros en el algoritmo [31].
Esta técnica establece un criterio de selección basado no sólo en el valor dela función objetivo, sino también en la suma de la violación de restricciones.Las reglas son las siguientes:
1. Cuando se comparan dos soluciones factibles, se elige aquella que tengamejor valor de aptitud.
2. Cuando se compara una solución factible y una no factible, la soluciónfactible es la que se elige.

3.3. Técnicas para el Manejo de Restricciones 23
3. Cuando se comparan dos soluciones no factibles, se elige aquella cuyasuma de violación de restricciones sea menor.
Aunque es una técnica bastante utilizada para el manejo de restricciones[31], es recomendable utilizar mecanismos que mantengan la diversidad enel AE, ya que debido a la presión de selección que ejercen las reglas, puedeobtenerse convergencia prematura.
3.3.3. Ordenamiento Aleatorio(Stochastic Ranking)
Técnica propuesta por Runarsson y Yao [40], utiliza un parámetro Pfque es agregado por el usuario para controlar la forma en que se compararáa las soluciones no factibles, esta comparación será por la suma de violaciónde restricciones o sólo por el valor de la función objetivo, ésto, de acuerdo alvalor del parámetro de�nido por el usuario.
Esta técnica usa un algoritmo de ordenamiento para dejar las mejores so-luciones a un nivel superior respecto de las peores. Dicho proceso se muestraen el Algoritmo 4.
Algoritmo 4 Ordenamiento Aleatorio.
1: Para i=1 hasta N Hacer2: Para j=1 hasta P-1 Hacer3: u = aleatorio(0,1)4: Si φ(Ij) = φ(I(j + 1) = 0)o(u ≤ P f ) Entonces5: Si f(Ij) > f(I(j + 1)) Entonces6: intercambiar(Ij , I(j + 1))7: Si no8: Si φ(Ij) > φ(I(j + 1)) Entonces9: intercambiar(Ij , I(j + 1))
10: Fin Si11: Fin Si12: Fin Si13: Fin Para14: Si no hay intercambio Entonces15: break16: Fin Si17: Fin Para
I es un individuo de la población, φ(Ij) es la suma de la violación de restric-ciones del individuo Ij , f(Ij) es el valor de la función objetivo del individuoIj

24 Capítulo 3. Optimización
3.3.4. ε−constrained method
Fue propuesto por Takahama y Sakai [44]. Toma dos soluciones y éstasson comparadas de acuerdo a un nivel de comparación conocido como ε. Silas dos soluciones son factibles, ligeramente no factibles o tienen la mismasuma de violación de restricciones, entonces las soluciones son comparadas deacuerdo al valor de su función objetivo. Si ambas soluciones son no factiblesson comparadas con base en la suma de violación de restricciones. La fórmulaes la siguiente:
(f( ~x1), φ( ~x1)) <ε (f( ~x2), φ( ~x2))
⇔
f( ~x1) < f( ~x2) si φ( ~x1),φ( ~x2) ≤ ε,f( ~x1) < f( ~x2) si φ( ~x1) = φ( ~x2),φ( ~x1) < φ( ~x2) deotramanera
(3.5)
(f( ~x1), φ( ~x1)) ≤ε (f( ~x2), φ( ~x2))
⇔
f( ~x1) ≤ f( ~x2) si φ( ~x1),φ( ~x2) ≤ ε,f( ~x1) ≤ f( ~x2) si φ( ~x1) = φ( ~x2),φ( ~x1) < φ( ~x2) deotramanera
(3.6)
El número de técnicas para el manejo de restricciones en AEs es muygrande, por lo que los detalles de cada una de ellas se pueden encontrar en[31], [21], [10].

Capítulo 4
Algoritmos Genéticos
Resumen: En este capítulo se muestra un panorama general sobre
los Algoritmos Genéticos (AGs), los elementos que los conforman así
como sus diferentes tipos de representación. Además se hará énfasis
en el operador de cruza por ser el operador principal en el Algoritmo
Genético (AG) y por ser el sujeto de estudio en esta investigación.
4.1. Elementos de un AG
Un AG es un AE que basa su comportamiento en la evolución natural yla genética. Los individuos que están mejor adaptados al ambiente son losque sobreviven en futuras generaciones. Al ser miembro de la familia de losAEs, los AGs comparten sus mismos elementos, los cuales se mencionan acontinuación:
4.1.1. Representación
En los AGs, al igual que en los AEs, la población es la unidad de evolucióny está compuesta por individuos que representan soluciones al problema. Acada individuo se le conoce también como cromosoma, un cromosoma estáconformado por genes y cada gen contiene información que podrá ser compar-tida en siguientes generaciones. Cada gen del cromosoma debe ser codi�cadode acuerdo al tipo de problemas que se quieren resolver. Los principales tiposde codi�cación genética se mencionan a continuación.
1. Codi�cación Binaria. Consiste en representar al cromosoma a travésde una cadena de bits, dónde cada una de ellas representa una soluciónal problema planteado [22], [36], [43]. Se requiere usualmente aplicar unproceso de decodi�ación cada vez que se requiera evaluar al individuo.
25

26 Capítulo 4. Algoritmos Genéticos
2. Codi�cación Real. En esta representación cada gen del cromosoma serepresenta por un número real y a la vez éste representa una variable delproblema a resolver. En esta representación usualmente no es necesariola decodi�cación para poder hacer la evaluación del individuo.
3. Permutaciones. Puede ser codi�cada a través de números enteros,bits u otros. Es muy utilizada en optimización combinatoria y se debecuidar cada una de las propiedades de ésta última, además de necesitaroperadores especiales [15]. La Figura 4.1 muestra un ejemplo de lasrepresentaciones mencionadas anteriormente.
Figura 4.1: Representaciones en AGs.
4.1.2. Selección de padres
Los individuos mejor adaptados al ambiente son los que sobreviven en elmodelo de la selección natural propuesta por Darwin. Este mismo modelo sepresenta en los AGs y para simularlo se selecciona a los mejores individuosde la población con base en el valor de su aptitud. Para hacer la selección,existen diferentes métodos que ayudan a llevar a cabo este proceso dentrodel AG, entre éstos se encuentran:
Selección Proporcional. Este tipo de selección considera la contri-bución de aptitud aportada por cada individuo al total de la población.Es decir, el individuo que más contribuya al total será el individuo conmayor probabilidad de ser seleccionado para ser padre. Dentro de es-ta categoría se mencionan la Ruleta, Sobrante Estocástico, UniversalEstocástica y Muestreo Determinístico.
Selección Por torneoFue propuesta por Wetzel en 1983 [2]. En este tipo de selección se elige
4.1. Elementos de un AG 27
al individuo con base en comparaciones directas entre ellos. Existendos versiones: determinista y probabilista. En las dos versiones se eli-gen p individuos, generalmente p = 2. En la forma determinista seelige el individuo con mejor aptitud, en la forma probabilista el mejores seleccionado aplicando cierta probabilidad sobre ellos, si la proba-bilidad cae sobre el individuo de mejor aptitud, éste es seleccionado,de lo contrario se selecciona el de menor aptitud. El proceso se repitehasta que se tenga el número de padres requerido. De acuerdo al tama-ño del torneo(p individuos elegidos) la presión de selección puede serdura o blanda. Se considera que un tamaño de p=10 genera un tipo deselección dura, y un tamaño entre 2 y 5 se considera blanda.
4.1.3. Operadores de Variación
Se conoce como operadores de variación a aquellos operadores que alaplicar alguna operación sobre el cromosoma son capaces de alterar de algunamanera la información genética de éste, obteniendo así un nuevo individuo.Los operadores de variación más conocidos en un AE son los operadores demutación y los operadores de cruza.
Al operador de mutación se le considera como secundario dentro del AGcomparándolo con la cruza que es el operador principal [36], [22]. La mutaciónse aplica en menor proporción que la cruza, generalmente el porcentaje demutación está dado entre 0.001 y 0.01, otros sugieren un valor de 1/L dónde,L = a la longitud del cromosoma. En representación binaria normalmente seutilizan tres tipos de mutación; la simple, la uniforme y la mutación por re-ordenamiento. En representación real los tipos de mutación más utilizados esla uniforme, en la cual se selecciona un gen de forma aleatoria y se aplica lamutación a dicho gen, y la no uniforme, en la cual la mutación se aplica conmayor intensidad al principio del proceso evolutivo y con menor intensidaden etapas �nales al mismo [15].
El operador de cruza es el operador más importante dentro de un AG[22], [15] y generalmente se aplica en porcentajes que superan el 60%. Másadelante, en este capítulo, se presenta con mayor detalle este operador.
4.1.4. Reemplazo
Una vez que se han generado nuevos individuos a través de la cruza yla mutación, se procede a evaluarlos para conocer su valor de aptitud. Elreemplazo consiste en hacer una selección de los individuos que pasarán ala siguiente generación de acuerdo a los lineamientos elegidos por el usuario,generalmente en un AG el reemplazo es generacional, es decir, se crea unanueva población de descendientes que sustituirá por completo a la original.Al aplicar el reemplazo generacional, es muy probable que se corra el riesgode perder la mejor solución que se tiene hasta el momento, por lo tanto,

28 Capítulo 4. Algoritmos Genéticos
se recomienda aplicar elitismo, es decir, seleccionar la mejor solución que setiene en la población anterior y reemplazarla por alguno de los individuosde la nueva población, por lo general se reemplaza por el descendiente conla peor aptitud.
4.2. Operadores de Cruza
El tema principal de este trabajo se basa en los operadores de cruzacon representación real, especí�camente en analizar su comportamiento enespacios restringidos para conocer si éste es distinto del que presentan enproblemas sin restricciones. Sin embargo, el hablar de operadores de cruzautilizados en representación real deja como premisa la existencia de opera-dores de cruza utilizados con otras representaciones, y en efecto, el hablarde distintas representaciones en un AG hace posible que éstos existan, porlo tanto, en este apartado se mencionaran de manera general algunos de losmuchos operadores de cruza que existen dependiendo el tipo de representa-ción que se este usando, primero se hará mención de operadores de cruzautilizados en representación binaria, seguido de los utilizados con permuta-ciones y por último los utilizados en la representación real, haciendo énfasisen los dos operadores utilizados en este trabajo.
4.2.1. Operadores de Cruza en Representación Binaria
Cruza de un punto. Se elige un punto de corte en el cromosoma alazar en los dos padres y se forman los descendientes intercambiando lainformación después del punto de corte de cada uno de los padres.
Cruza de n puntos. Similar a la cruza de un punto, solo que aquí seselecciona un número de cortes mayor o igual a dos.
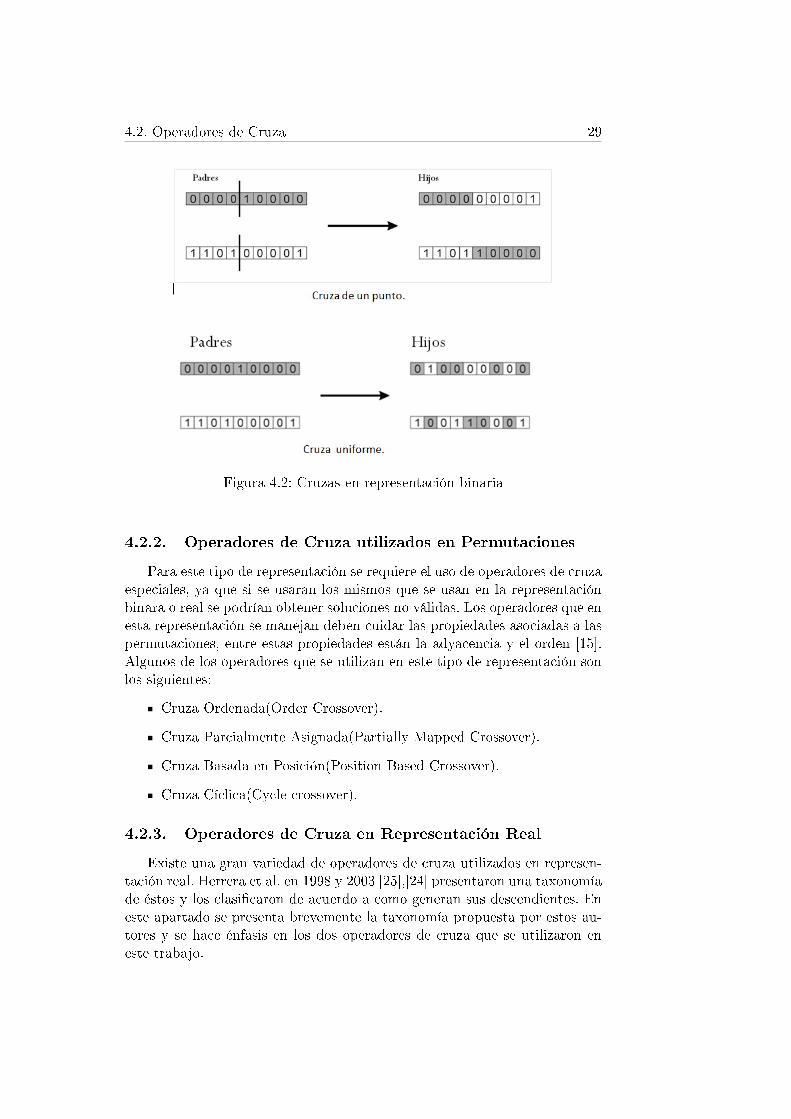
Cruza uniforme. Cada padre comparte un gen a su hijo aplicandocierta probabilidad, si es el padre 1, éste será el que comparta su genal hijo 1, de lo contrario será el padre 2 el que comparta su gen. Lomismo se sigue para el hijo 2. La Figura 4.2 muestra grá�camente lacruza de un punto y la uniforme.
4.2. Operadores de Cruza 29
Figura 4.2: Cruzas en representación binaria
4.2.2. Operadores de Cruza utilizados en Permutaciones
Para este tipo de representación se requiere el uso de operadores de cruzaespeciales, ya que si se usaran los mismos que se usan en la representaciónbinara o real se podrían obtener soluciones no válidas. Los operadores que enesta representación se manejan deben cuidar las propiedades asociadas a laspermutaciones, entre estas propiedades están la adyacencia y el orden [15].Algunos de los operadores que se utilizan en este tipo de representación sonlos siguientes:
Cruza Ordenada(Order Crossover).
Cruza Parcialmente Asignada(Partially Mapped Crossover).
Cruza Basada en Posición(Position Based Crossover).
Cruza Cíclica(Cycle crossover).
4.2.3. Operadores de Cruza en Representación Real
Existe una gran variedad de operadores de cruza utilizados en represen-tación real. Herrera et al. en 1998 y 2003 [25],[24] presentaron una taxonomíade éstos y los clasi�caron de acuerdo a como generan sus descendientes. Eneste apartado se presenta brevemente la taxonomía propuesta por estos au-tores y se hace énfasis en los dos operadores de cruza que se utilizaron eneste trabajo.

30 Capítulo 4. Algoritmos Genéticos
4.2.3.1. Clasi�cación propuesta por Herrera et al. en 2003
Aunque existen diferentes operadores de cruza que pueden ser utilizadosen representación real, también es cierto que cada uno de ellos ofrece buenosresultados dependiendo el tipo de problema a tratar, es decir, no existe unoque sea bueno en todos [4],[3], [16]. Cada operador tiene características que lohace único y diferente de los demás, aunque al mismo tiempo, algunos de elloscomparten similitudes entre si. Es a partir de estas similitudes que Herreraet al. [24], propone cuatro grupos dónde engloba a diferentes operadores decruza tomando en cuenta la forma en cómo generan sus descendientes. Acontinuación se presenta dicha clasi�cación.
1. Operadores de Cruza Discretos (DCOs por sus siglas en in-glés). Esta categoría está conformada por los mismos operadores decruza utilizados en representación binaria, es decir la cruza de un pun-to, cruza uniforme, etc. Este tipo de operadores permite que los hijosconserven intactos los genes de los padres, es decir, sólo hay un inter-cambio de los mismos entre padres e hijos, por lo tanto, debido a quelos hijos son generados en el espacio delimitado por los padres, estosoperadores no ofrecen ninguna posibilidad de exploración.
2. Operadores de Cruza basados en Agregación (ABCOs por sussiglas en inglés). Este grupo contiene aquellos operadores que utilizanuna función de agregación, la cual combina los valores de los genes delos padres para luego ser transmitidos a los hijos. Los operadores decruza aritmética, geométrica y lineal son ejemplo de esta categoría. Si[ai, bi] representa el intervalo en el que se mueve el gen i, una funciónde agregación es aplicada al intervalo de tal forma que f i : [ai, bi] →[a′i, b
′i]([a
′i, b′i]) ⊆ [ai, bi] entonces, el gen de cada hijo es tomado a
partir de f i(x1i, x2i) asimilando que x1 y x2 representa a los padresseleccionados para generar nuevos descendientes.
3. Operadores de Cruza basados en Vecindad (NBCOs por sussiglas en inglés). Aquí se encuentran agrupados aquellos operadoresque generan sus descendientes a partir del intervalo formado por lavecindad de los genes de los padres seleccionados y el uso de una dis-tribución de probabilidad. Algunos de los operadores que conformaneste grupo son BLX-α [18], SBX [13] y FR [38]. Por la forma de generarlos genes de los hijos, estos operadores tienen la capacidad de explorarel espacio de búsqueda más allá de los límites de los padres.
4. Operadores de Cruza Híbridos (HCOs por sus siglas en in-glés). Esta categoría se distingue de las demás en que los descendientesson generados combinando más de un operador de cruza, generalmentecombina operadores con capacidad de explotación y por otro lado los

4.2. Operadores de Cruza 31
que favorecen la exploración del espacio de búsqueda, por lo tanto, estaclase de operadores puede alcanzar diferentes niveles tanto de explota-ción como de exploración simultáneamente en el proceso de búsqueda[24].
4.2.3.2. Operadores de cruza utilizados en este trabajo
Para llevar a cabo la propuesta planteada en este documento se tomarondos operadores de cruza utilizados en representación real basados en vecin-dad, dado que esta clase es la que provee hoy en día a los operadores de cruzamás populares en la literatura especializada. En este apartado se mencionanlas características de estos operadores.
BLX-α. Operador de Cruza propuesto por L.J. Eshelman y J.D. Shaf-fer [18] el cual está basado en el operador propuesto por Radclife en1990 [39]. Los autores proponen este operador permitiendo la capacidadde explotación pero al mismo tiempo dotarlo con cierta probabilidad deampliar el rango delimitado por los padres, favoreciendo así la explora-ción del espacio de búsqueda. Este operador genera dos descendientesy1, y2 a partir de dos padres x1, x2, cada gen de los hijos es toma-do del intervalo [xmin − Iα, xmax + Iα], dónde: xmax = max[x1, x2],xmin = min[x1, x2], I = xmax − xmin, α ∈ [0, 1].El parámetro α permite al operador explorar o explotar el espacio debúsqueda dependiendo del valor asignado, si α toma valores menoresa 0.5, el operador tiene mayor probabilidad de explotación que de ex-ploración y viceversa, si el valor de α es mayor a 0.5 la capacidad deexploración es mayor que la de explotación. Los autores proponen unvalor de α igual a 0.5, ya que así el operador tendrá la misma probabi-lidad de explorar que de explotar el espacio de búsqueda. La Figura 4.3muestra el comportamiento del operador cuando éste toma valores ensu parámetro mayores o menores a 0.5.
Figura 4.3: Operador de Cruza BLX

32 Capítulo 4. Algoritmos Genéticos
SBX. Este operador fue propuesto por K. Deb en 1995 [13] con laintención de simular la cruza binaria de un punto pero ahora en espacioscontinuos. En esta cruza, se generan dos descendientes y1, y2 a partir dedos padres x1, x2, cada hijo es generado aplicando la siguiente fórmulaa los padres:
y1 = 0,5[(x1 + x2)− β|x2 − x1|]
y2 = 0,5[(x1 + x2) + β|x2 − x1|]
β
(2u)1
nc+1 si u ≤ 0,5,
( 12(1−u))
1nc+1 other
(4.1)
Se conoce a β como el factor de dispersión, el cual toma valores menoresa uno o mayores a éste. Si el factor de dispersión toma valores menores omayores a uno, entonces existe mayor probabilidad de generar hijos másalejados de los padres, por otro lado, si el factor de dispersión toma elvalor de uno, entonces los hijos serán una copia de los padres. El factorde dispersión es calculado a partir del valor que obtiene el parámetronc, este parámetro toma valores enteros positivos, si los valores quetoma son cercanos a cero, entonces los hijos serán generados más lejosde los padres y con valores muy altos, los hijos serán generados muycerca de los padres. La Figura 4.4 muestra este comportamiento.
Figura 4.4: Operador de Cruza SBX [14]
Capítulo 5
Propuesta y Resultados
Resumen: El objetivo de este capítulo es describir de manera detalla-
da la medida de desempeño propuesta en el trabajo de tesis, el diseño
experimental utilizado y los resultados obtenidos después de llevar a
cabo cada experimento.
5.1. Medida de desempeño
Este trabajo presenta el estudio empírico de dos operadores de cruzaBLX-α y SBX [18],[13], con el objetivo de conocer su comportamiento ydesempeño al resolver problemas de optimización numérica con restricciones.El estudio propone medir la capacidad que tiene el operador para generarsoluciones factibles variando los valores del parámetro al operador de cruza.Como es conocido en los AGs por lo general se requieren dos padres generardos nuevos individuos [22], [36], tomando ésto en consideración, además dela importancia de generar soluciones factibles durante la búsqueda, en esteestudio empírico se tienen en cuenta los siguientes porcentajes:
1. Dados dos padres factibles se desea conocer el porcentaje de descen-dientes factibles generados.
2. Dados dos padres no factibles se desea conocer el porcentaje de des-cendientes factibles generados.
3. Dados un padre factible y un padre no factible se desea conocer elporcentaje de descendientes factibles generados.
Considerando lo anterior se toma en cuenta el número máximo de genera-ciones permitidas al algoritmo(MaxGen) y el total de cruzas realizadas encada generación(TCgen). Por ejemplo, si el tamaño de la población es de80 y dos padres generan dos hijos, entonces el total de cruzas realizadas en
33

34 Capítulo 5. Propuesta y Resultados
cada generación será de 40; si el máximo de generaciones permitidas es de6,249 entonces el máximo de cruzas producidas en cada ejecución será de249,960 y al �nal de 30 ejecuciones tendríamos un total de 7, 498, 800 cruzasgeneradas por el operador las cuales conformarían el 100%. Esta operaciónse describe formalmente en la fórmula:
Tc =r∑i=1
(MaxGen ∗ TCgen)
dónde, Tc representa el total de cruzas a realizar en todo el experimento, res el máximo número de ejecuciones. A partir de esto partimos para hacer elconteo de soluciones factibles generadas por el operador como se describe acontinuación:
Si Tc = representa el total de cruzas durante todo el experimento,cf representa el total de cruzas a realizar en las que ya sea que los dospadres son factibles o los dos padres no son factibles o sólo uno de los padreses factible, entonces:
Pcf =cf ∗ 100Tc
donde, Pcf representa el porcentaje de las cruzas en las que ya sea que losdos padres son factibles o los dos padres no son factibles o sólo uno de lospadres es factible.Entonces se tienen tres variantes de Pcf donde:a: signi�ca el total de cruzas en las cuales los dos hijos obtenidos son nofactibles,b: signi�ca el total de cruzas en las cuales sólo uno de los hijos obtenidos esfactible,c: signi�ca el total de cruzas en las cuales los dos hijos obtenidos son facti-bles, entonces:
Pcfa =a ∗ Pcfcf
Pcfb =b ∗ Pcfcf
Pcfc =c ∗ Pcfcf
Dónde:Pcfa: porcentaje de cruzas en las cuales los dos hijos obtenidos son no facti-bles,Pcfb: porcentaje de cruzas en las cuales sólo uno de los hijos obtenidos esfactible,Pcfc: porcentaje de cruzas en las cuales los dos hijos obtenidos son factibles.

5.2. Diseño Experimental 35
Para obtener el porcentaje de soluciones factibles (Psf) obtenidas por eloperador de cruza, entonces:
Psf = Pcfc+1
2Pcfb
Para dejar este punto más claro se muestra un ejemplo dando comoentrada cierto porcentaje de soluciones factibles, ejempli�cando el punto 1,y obtener el porcentaje de factibilidad correspondiente.Tenemos que Tc = 7, 498, 800; cf = 4, 645, 509; Pcf = 61.95; a = 812,814;b = 1, 761, 055; c = 2, 071, 640; Pcfa = 10.83; Pcfb = 23.48; Pcfc = 27.62;Psf = 39.36
Si del total de cruzas (7, 498, 800) se tiene un total de 4, 645, 509 cruzasen las que los dos padres son factibles, la pregunta de interés es conocerel porcentaje de factibilidad obtenido al realizar estas cruzas, así, de formarelativa se tiene que si 7, 498, 800 corresponde al 100% de las cruzas, entonces4, 645, 509 corresponde al 61.95%; de este 61.95% de cruzas a realizar esmuy probable que no se obtenga el mismo porcentaje de factibilidad ya queel operador se comporta de manera ciega ante el tema de la factibilidad.Continuando con el ejemplo, suponiendo que de las 4, 645, 509 cruzas que serealizaron se obtuvieron 812,814 cruzas en las que los dos hijos resultaron nofactibles, 1, 761, 055 cruzas en las que sólo uno de los hijos resultó factibley 2, 071, 640 fueron cruzas en las que los dos hijos resultaron factibles.Entonces, se tiene que del 61.95% de cruzas el 10.83% resultaron cruzasen donde los 2 hijos fueron no factibles, el 23.48% dónde sólo uno de loshijos fue factible y el 27.62% dónde los dos hijos fueron factibles. Si estose traslada para obtener el porcentaje de soluciones factibles generadas porel operador se tiene que del 61.95% de soluciones factibles que entraron seobtuvo únicamente el 39.36% (23.48% /2 + 27.62%) de soluciones factiblesy el resto 22.56% (23.46% /2 + 10.83%)fueron de soluciones no factibles.Para el caso cuando sólo uno de los padres es factible hay que tener en cuentaque cuando se hable del porcentaje de soluciones factibles que entran, sóloentra 1 factible en cada pareja por lo tanto si entraran 60% de parejas eneste caso, sólo entra la mitad de éstas como soluciones factibles.
5.2. Diseño Experimental
Para probar el comportamiento del operador de cruza en el AG, se elimi-na el operador de mutación para evitar que éste inter�era en los resultadosobtenidos. Se hace uso del proceso de selección por torneo binario y las reglasde factibilidad propuesta por Deb [12] como técnica para el manejo de res-tricciones. Los benchmarks utilizados para el experimento son los expuestosen el Congreso de Cómputo Evolutivo del 2006 [30] y del 2010 [32] CEC2006y CEC2010 respectivamente. El detalle de cada función de prueba se en-

36 Capítulo 5. Propuesta y Resultados
cuentra en los Apéndices B, C y un resumen de las características de cadafunción se encuentra en las Tablas 5.1 y 5.2.
En la Tabla 5.1 la primer columna identi�cada como Prob muestra losproblemas a resolver; la columna identi�cada como n muestra el total de va-riables para cada problema; la tercera columna muestra el tipo del problema;la columna identi�cada como ρ muestra el tamaño de la zona factible paracada problema; LI muestra el total de restricciones de desigualdad lineal encada función; NI re�ere a restricciones de desigualdad no lineal; LE hacereferencia a restricciones de igualdad lineal y NE a restricciones de igualdadno lineal, por último a muestra el número de restricciones activas que seencuentran en la función.
Prob. n Tipo de Función ρ LI NI LE NE ag01 13 cuadrática 0:0111% 9 0 0 0 6g02 20 no lineal 99:9971% 0 2 0 0 1g03 10 polinomial 0:0000% 0 0 0 1 1g04 5 cuadrática 52:1230% 0 6 0 0 2g05 4 cúbica 0:0000% 2 0 0 3 3g06 2 cúbica 0:0066% 0 2 0 0 2g07 10 cuadrática 0:0003% 3 5 0 0 6g08 2 no lineal 0:8560% 0 2 0 0 0g09 7 polinomial 0:5121% 0 4 0 0 2g10 8 lineal 0:0010% 3 3 0 0 6g11 2 cuadrática 0:0000% 0 0 0 1 1g12 3 cuadrática 4:7713% 0 1 0 0 0g13 5 no lineal 0:0000% 0 0 0 3 3g14 10 no lineal 0:0000% 0 0 3 0 3g15 3 cuadrática 0:0000% 0 0 1 1 2g16 5 no lineal 0:0204% 4 34 0 0 4g17 6 no lineal 0:0000% 0 0 0 4 4g18 9 cuadrática 0:0000% 0 13 0 0 6g19 15 no lineal 33:4761% 0 5 0 0 0g20 24 lineal 0:0000% 0 6 2 12 16g21 7 lineal 0:0000% 0 1 0 5 6g22 22 lineal 0:0000% 0 1 8 11 19g23 9 lineal 0:0000% 0 2 3 1 6g24 2 lineal 79:6556% 0 2 3 1 6
Tabla 5.1: Conjunto de funciones del CEC2006.
Cabe mencionar que de las funciones que se muestran en el CEC2006 nose utilizaron todas en el experimento ya que el propósito es medir la capaci-dad del operador para generar soluciones factibles en espacios restringidos yen particular cuando la zona factible es pequeña, por lo tanto, las funcionesutilizadas fueron la g01, g03, g05-g07, g10, g1l, g13-g18 y g23. Sólo se utiliza-ron aquellas funciones cuya área factible es muy pequeña, es decir, aquellascuyo valor de ρ es igual a 0 o cercano a este, esto se puede ver en la columnaidenti�cada con el nombre de ρ.En la Tabla 5.2 la primera columna muestra tanto el nombre del proble-ma como el rango de valores que pueden tener las variables del problema;
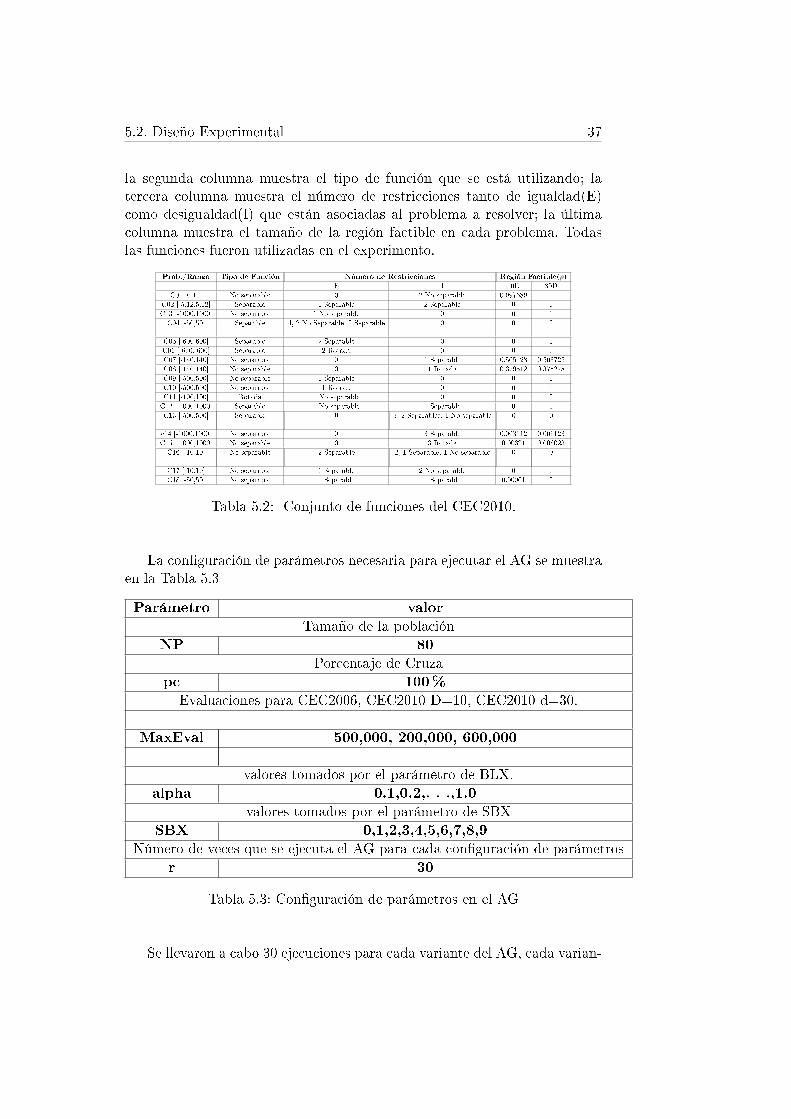
5.2. Diseño Experimental 37
la segunda columna muestra el tipo de función que se está utilizando; latercera columna muestra el número de restricciones tanto de igualdad(E)como desigualdad(I) que están asociadas al problema a resolver; la últimacolumna muestra el tamaño de la región factible en cada problema. Todaslas funciones fueron utilizadas en el experimento.
Prob./Rango Tipo de Función Número de Restricciones Región Factible(ρ)E I 10D 30D
C01 [0,10] No separable 0 2 No separable 0.997689 1C02 [-5.12,5.12] Separable 1 Separable 2 Separable 0 0C03 [-1000,1000] No separable 1 No separable 0 0 0C04 [-50,50] Separable 4, 2 No Separable, 2 Separable 0 0 0
C05 [-600,600] Separable 2 Separable 0 0 0C06 [-600, 600] Separable 2 Rotada 0 0 0C07 [-140,140] No separable 0 1 Separable 0.505123 0.503725C08 [-140,140] No separable 0 1 Rotada 0.379512 0.375278C09 [-500,500] No separable 1 Separable 0 0 0C10 [-500,500] No separable 1 Rotada 0 0 0C11 [-100,100] Rotada 1 No separable 0 0 0C12 [-1000,1000] Separable 1 No separable 1 Separable 0 0C13 [-500,500] Separable 0 3, 2 Separables, 1 No separable 0 0
c14 [-1000,1000] No separable 0 3 Separable 0.003112 0.006123C15 [-1000,1000] No separable 0 3 Rotada 0.00321 0.006023C16 [-10,10] No separable 2 Separable 2, 1 Separable, 1 No separable 0 0
C17 [-10,10] No separable 1 Separable 2 No separable 0 0C18 [-50,50] No separable 1 Separable 1 Separable 0.00001 0
Tabla 5.2: Conjunto de funciones del CEC2010.
La con�guración de parámetros necesaria para ejecutar el AG se muestraen la Tabla 5.3
Parámetro valorTamaño de la población
NP 80Porcentaje de Cruza
pc 100%Evaluaciones para CEC2006, CEC2010 D=10, CEC2010 d=30.
MaxEval 500,000, 200,000, 600,000
valores tomados por el parámetro de BLX.alpha 0.1,0.2,. . .,1.0
valores tomados por el parámetro de SBXSBX 0,1,2,3,4,5,6,7,8,9
Número de veces que se ejecuta el AG para cada con�guración de parámetrosr 30
Tabla 5.3: Con�guración de parámetros en el AG
Se llevaron a cabo 30 ejecuciones para cada variante del AG, cada varian-

38 Capítulo 5. Propuesta y Resultados
te di�ere la una de la otra únicamente en el valor tomado por el parámetrodel operador. Cada función fue probada 30 veces con cada valor del paráme-tro, así los resultados presentados en la sección pertinente a los mismos, semuestran tomando el valor promedio de las 30 ejecuciones.
5.3. Resultados
Los resultados se muestran en tablas, cada tabla muestra el valor obteni-do en cada conjunto de funciones. En la parte superior la tabla se divide deacuerdo a los tres casos que se están investigando, es decir, conocer el por-centaje de factibilidad cuando se realizan cruzas en la que los dos padres sonfactibles, lo cual se denota con el encabezado 2F, el segundo caso consiste enconocer el porcentaje de factibilidad cuando los dos padres son no factibles yse denota como 2NF, el tercer caso muestra el porcentaje de factibilidad ob-tenido cuando solo uno de los padres es factible y se denota como 1F-1NF; enel último apartado de la derecha de la tabla, se muestra el porcentaje de fac-tibilidad general obtenido en la función, y se denota como FF. En la primercolumna de la tabla, se muestran cada una de las funciones utilizadas en elexperimento; en cada caso se muestra el porcentaje promedio de factibilidadobtenido en las 30 ejecuciones, la columna se identi�ca por%F, también semuestra, el valor del parámetro con el cual se obtuvo el mayor porcentaje defactibilidad en la función, dicha columna está identi�cada por el parámetrodel operador que puede ser α o η; la siguiente columna se identi�ca con elnombre de NE, y en ésta se muestran los valores del parámetro en el cualno hay diferencia signi�cativa respecto al valor de la columna anterior quees con el que se encontró el mayor porcentaje de factibilidad, cuando en lacolumna NE aparece un �-�(guión) signi�ca que no existe diferencia signi�-cativa entre el valor del parámetro reportado en la columna α o η respectode los otros valores que éste puede obtener; cuando este guión aparece entoda la �la signi�ca que no hubo soluciones factibles para esa función. Semuestran también grá�cas representativas de aplicar la prueba estadísticade Friedman a los resultados obtenidos cuando los dos padres son factibles,cuando los dos padres son no factibles o cuando sólo uno de los padres esfactible. Esta grá�ca muestra una serie de lineas hirizontales, cada línea re-presenta el valor de parámetro en el operador, así, en el eje Y se presentanlos diferentes valores que toma el parámetro del operador BLX-α o SBX.La línea que se remarca de color azul es el valor del parámetro con el cualel operador alcanzó mayor numero de soluciones factibles en la función, laslíneas que aparecen en gris, representan los valores del parámetro donde noexiste diferencia signi�cativa respecto del valor en el parámetro que alcanzómayor numero de soluciones factibles, �nalmente las líneas de color rojo in-dican los valores del parámetro en los cuales si existe diferencia signi�cativarespecto del valor en el parámetro que alcanzó mayor numero de soluciones
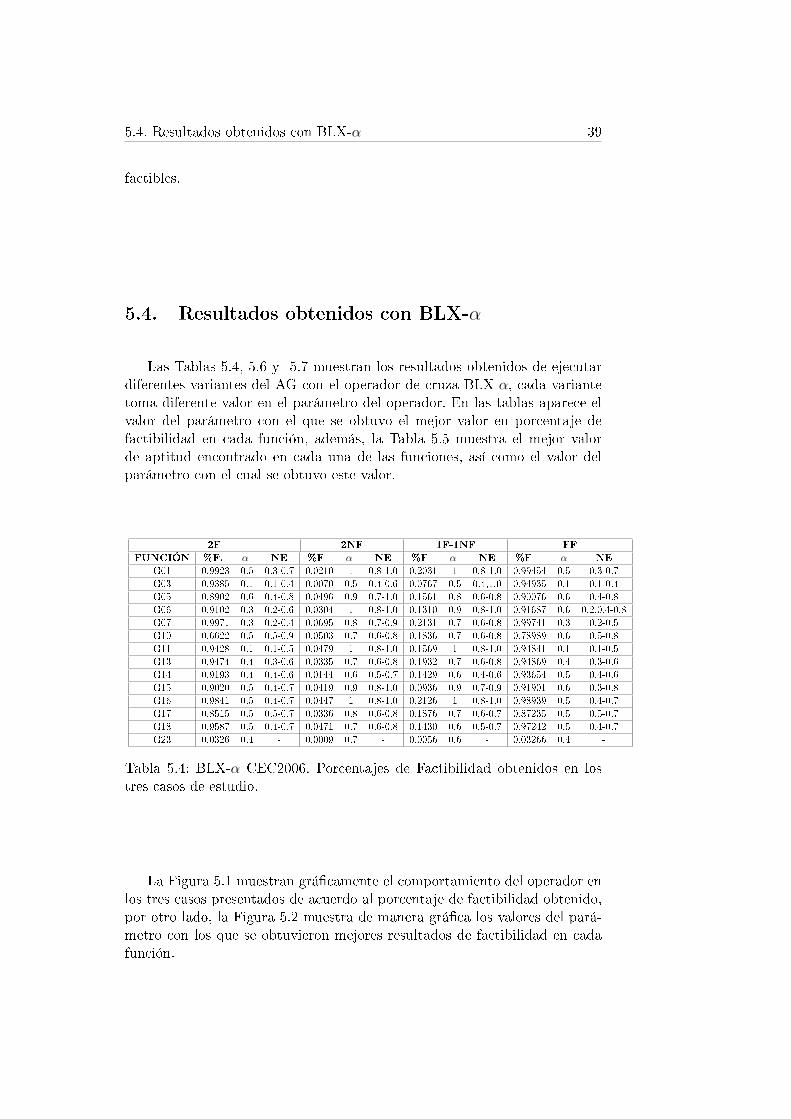
5.4. Resultados obtenidos con BLX-α 39
factibles.
5.4. Resultados obtenidos con BLX-α
Las Tablas 5.4, 5.6 y 5.7 muestran los resultados obtenidos de ejecutardiferentes variantes del AG con el operador de cruza BLX-α, cada variantetoma diferente valor en el parámetro del operador. En las tablas aparece elvalor del parámetro con el que se obtuvo el mejor valor en porcentaje defactibilidad en cada función, además, la Tabla 5.5 muestra el mejor valorde aptitud encontrado en cada una de las funciones, así como el valor delparámetro con el cual se obtuvo este valor.
2F 2NF 1F-1NF FFFUNCIÓN %F. α NE %F α NE %F α NE %F α NE
G01 0.9923 0.5 0.3-0.7 0.0210 1 0.8-1.0 0.2031 1 0.8-1.0 0.99454 0.5 0.3-0.7G03 0.9385 0.1 0.1-0.4 0.0070 0.5 0.4-0.6 0.0767 0.5 0.4,1.0 0.94935 0.1 0.1-0.4G05 0.8902 0.6 0.4-0.8 0.0496 0.9 0.7-1.0 0.1561 0.8 0.6-0.8 0.90076 0.6 0.4-0.8G06 0.9102 0.3 0.2-0.6 0.0304 1 0.8-1.0 0.1310 0.9 0.8-1.0 0.91687 0.6 0.2,0.4-0.8G07 0.9971 0.3 0.2-0.4 0.0695 0.8 0.7-0.9 0.2131 0.7 0.6-0.8 0.99741 0.3 0.2-0.5G10 0.6622 0.5 0.5-0.9 0.0503 0.7 0.6-0.8 0.1836 0.7 0.6-0.8 0.78989 0.6 0.5-0.8G11 0.9428 0.1 0.1-0.5 0.0479 1 0.8-1.0 0.1569 1 0.8-1.0 0.94841 0.1 0.1-0.5G13 0.9474 0.4 0.3-0.6 0.0335 0.7 0.6-0.8 0.1932 0.7 0.6-0.8 0.94869 0.4 0.3-0.6G14 0.9193 0.4 0.4-0.6 0.0144 0.6 0.5-0.7 0.1429 0.6 0.4-0.6 0.93654 0.5 0.4-0.6G15 0.9020 0.5 0.4-0.7 0.0419 0.9 0.8-1.0 0.0936 0.9 0.7-0.9 0.91901 0.6 0.3-0.8G16 0.9841 0.5 0.4-0.7 0.0447 1 0.8-1.0 0.2126 1 0.8-1.0 0.98939 0.5 0.4-0.7G17 0.8515 0.5 0.5-0.7 0.0336 0.8 0.6-0.8 0.1876 0.7 0.6-0.7 0.87235 0.5 0.5-0.7G18 0.9587 0.5 0.4-0.7 0.0471 0.7 0.6-0.8 0.1430 0.6 0.5-0.7 0.97242 0.5 0.4-0.7G23 0.0326 0.4 - 0.0009 0.7 - 0.0056 0.6 - 0.03266 0.4 -
Tabla 5.4: BLX-α CEC2006. Porcentajes de Factibilidad obtenidos en lostres casos de estudio.
La Figura 5.1 muestran grá�camente el comportamiento del operador enlos tres casos presentados de acuerdo al porcentaje de factibilidad obtenido,por otro lado, la Figura 5.2 muestra de manera grá�ca los valores del pará-metro con los que se obtuvieron mejores resultados de factibilidad en cadafunción.

40 Capítulo 5. Propuesta y Resultados
Figura 5.1: Factibilidad generada por BLX cuando: 2F= dos padres sonfactibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
Figura 5.2: Valores del parámetro α con los que se obtuvieron mejores resul-tados de factibilidad en funciones del CEC2006. 2F= dos padres son facti-bles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de los padreses factible.
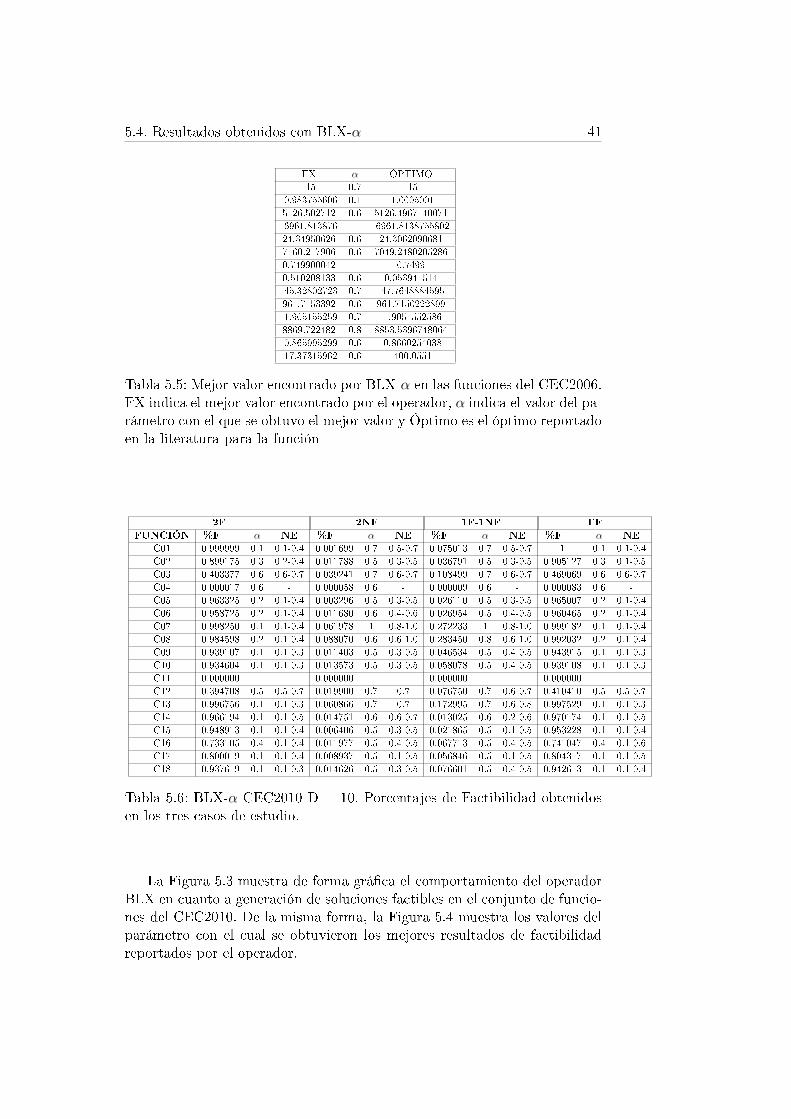
5.4. Resultados obtenidos con BLX-α 41
FX α ÓPTIMO-15 0.7 -15
-0.983755606 0.1 -1.00050015126.502712 0.6 5126.4967140071-6961.813876 1 -6961.813875580224.34950626 0.6 24.30620906817160.217906 0.6 7049.24802052860.749900042 1 0.74990.510208133 0.6 0.053941514-45.32802723 0.7 -47.7648884595961.7153392 0.6 961.7150222899-1.905155259 0.7 -1.90515525868869.722482 0.8 8853.5396748064-0.865995299 0.6 -0.8660254038-17.37315962 0.6 -400.0551
Tabla 5.5: Mejor valor encontrado por BLX-α en las funciones del CEC2006.FX indica el mejor valor encontrado por el operador, α indica el valor del pa-rámetro con el que se obtuvo el mejor valor y Óptimo es el óptimo reportadoen la literatura para la función
2F 2NF 1F-1NF FFFUNCIÓN %F α NE %F α NE %F α NE %F α NE
C01 0.999999 0.1 0.1-0.4 0.001699 0.7 0.5-0.7 0.075013 0.7 0.5-0.7 1 0.1 0.1-0.4C02 0.899175 0.3 0.2-0.4 0.011788 0.5 0.3-0.5 0.036791 0.5 0.3-0.5 0.905127 0.3 0.1-0.5C03 0.403377 0.6 0.6-0.7 0.039241 0.7 0.6-0.7 0.108499 0.7 0.6-0.7 0.469069 0.6 0.6-0.7C04 0.000017 0.6 - 0.000058 0.6 - 0.000009 0.6 - 0.000083 0.6 -C05 0.963325 0.2 0.1-0.4 0.003296 0.5 0.3-0.5 0.026110 0.5 0.3-0.5 0.965007 0.2 0.1-0.4C06 0.958725 0.2 0.1-0.4 0.011680 0.6 0.4-0.6 0.026954 0.5 0.4-0.5 0.960465 0.2 0.1-0.4C07 0.998250 0.1 0.1-0.4 0.061978 1 0.8-1.0 0.272233 1 0.8-1.0 0.999182 0.1 0.1-0.4C08 0.984598 0.2 0.1-0.4 0.088070 0.6 0.6-1.0 0.283450 0.8 0.6-1.0 0.992032 0.2 0.1-0.4C09 0.939107 0.1 0.1-0.3 0.011403 0.5 0.3-0.5 0.046534 0.5 0.4-0.5 0.943915 0.1 0.1-0.3C10 0.934604 0.1 0.1-0.3 0.013573 0.5 0.3-0.5 0.058078 0.5 0.4-0.5 0.939108 0.1 0.1-0.3C11 0.000000 - - 0.000000 - - 0.000000 - - 0.000000 - -C12 0.394708 0.5 0.5-0.7 0.019900 0.7 0.7 0.076750 0.7 0.6-0.7 0.410410 0.5 0.5-0.7C13 0.996756 0.1 0.1-0.3 0.060866 0.7 0.7 0.172995 0.7 0.6-0.8 0.997529 0.1 0.1-0.3C14 0.966194 0.1 0.1-0.5 0.014751 0.6 0.6-0.7 0.013025 0.6 0.2-0.6 0.970174 0.1 0.1-0.5C15 0.948913 0.1 0.1-0.4 0.006406 0.5 0.3-0.5 0.021865 0.5 0.1-0.5 0.953228 0.1 0.1-0.4C16 0.733105 0.4 0.1-0.4 0.011977 0.5 0.4-0.5 0.067713 0.5 0.4-0.5 0.741047 0.4 0.1-0.6C17 0.800019 0.1 0.1-0.4 0.008937 0.5 0.1-0.5 0.056846 0.5 0.1-0.5 0.804317 0.1 0.1-0.5C18 0.937619 0.1 0.1-0.3 0.014626 0.5 0.3-0.5 0.076601 0.5 0.4-0.5 0.942613 0.1 0.1-0.4
Tabla 5.6: BLX-α CEC2010 D = 10. Porcentajes de Factibilidad obtenidosen los tres casos de estudio.
La Figura 5.3 muestra de forma grá�ca el comportamiento del operadorBLX en cuanto a generación de soluciones factibles en el conjunto de funcio-nes del CEC2010. De la misma forma, la Figura 5.4 muestra los valores delparámetro con el cual se obtuvieron los mejores resultados de factibilidadreportados por el operador.

42 Capítulo 5. Propuesta y Resultados
Figura 5.3: Factibilidad generada por BLX en el CEC2010 D=10 cuando:2F= dos padres son factibles; 2NF= Dos padres son no factibles y 1F-1NF=sólo uno de los padres es factible.
Figura 5.4: Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=10. 2F= dos padresson factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
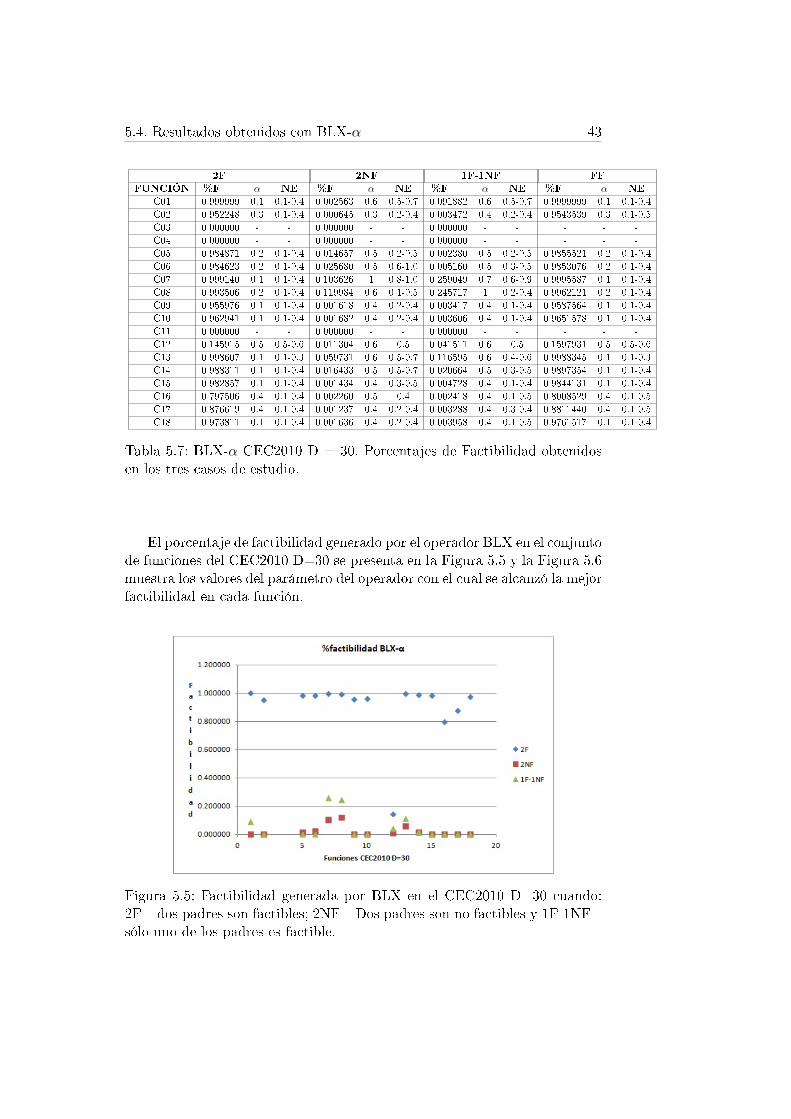
5.4. Resultados obtenidos con BLX-α 43
2F 2NF 1F-1NF FFFUNCIÓN %F α NE %F α NE %F α NE %F α NE
C01 0.999999 0.1 0.1-0.4 0.002563 0.6 0.5-0.7 0.091882 0.6 0.5-0.7 0.9999999 0.1 0.1-0.4C02 0.952248 0.3 0.1-0.4 0.000645 0.3 0.2-0.4 0.003472 0.4 0.2-0.4 0.9543539 0.3 0.1-0.5C03 0.000000 - - 0.000000 - - 0.000000 - - - - -C04 0.000000 - - 0.000000 - - 0.000000 - - - - -C05 0.984871 0.2 0.1-0.4 0.014657 0.5 0.2-0.5 0.002380 0.5 0.2-0.5 0.9855521 0.2 0.1-0.4C06 0.984623 0.2 0.1-0.4 0.025680 0.5 0.6-1.0 0.005160 0.5 0.3-0.5 0.9853076 0.2 0.1-0.4C07 0.999140 0.1 0.1-0.4 0.103626 1 0.8-1.0 0.259049 0.7 0.6-0.9 0.9995587 0.1 0.1-0.4C08 0.993506 0.2 0.1-0.4 0.119984 0.6 0.1-0.5 0.245717 1 0.2-0.4 0.9962121 0.2 0.1-0.4C09 0.955976 0.1 0.1-0.4 0.001618 0.4 0.2-0.4 0.003417 0.4 0.1-0.4 0.9587564 0.1 0.1-0.4C10 0.962941 0.1 0.1-0.4 0.001682 0.4 0.2-0.4 0.003606 0.4 0.1-0.4 0.9651578 0.1 0.1-0.4C11 0.000000 - - 0.000000 - - 0.000000 - - - - -C12 0.145915 0.5 0.5-0.6 0.011304 0.6 0.5 0.041511 0.6 0.5 0.1597931 0.5 0.5-0.6C13 0.998607 0.1 0.1-0.3 0.059731 0.6 0.5-0.7 0.116595 0.6 0.4-0.6 0.9988345 0.1 0.1-0.3C14 0.988311 0.1 0.1-0.4 0.016433 0.5 0.5-0.7 0.020664 0.5 0.3-0.5 0.9897354 0.1 0.1-0.4C15 0.982857 0.1 0.1-0.4 0.001434 0.4 0.3-0.5 0.004728 0.4 0.1-0.4 0.9844131 0.1 0.1-0.4C16 0.797506 0.4 0.1-0.4 0.002260 0.5 0.4 0.002418 0.4 0.1-0.5 0.8008529 0.4 0.1-0.5C17 0.876619 0.4 0.1-0.4 0.001237 0.4 0.2-0.4 0.003288 0.4 0.3-0.4 0.8811440 0.4 0.1-0.5C18 0.973811 0.1 0.1-0.4 0.001636 0.4 0.2-0.4 0.003958 0.4 0.1-0.5 0.9761517 0.1 0.1-0.4
Tabla 5.7: BLX-α CEC2010 D = 30. Porcentajes de Factibilidad obtenidosen los tres casos de estudio.
El porcentaje de factibilidad generado por el operador BLX en el conjuntode funciones del CEC2010 D=30 se presenta en la Figura 5.5 y la Figura 5.6muestra los valores del parámetro del operador con el cual se alcanzó la mejorfactibilidad en cada función.
Figura 5.5: Factibilidad generada por BLX en el CEC2010 D=30 cuando:2F= dos padres son factibles; 2NF= Dos padres son no factibles y 1F-1NF=sólo uno de los padres es factible.
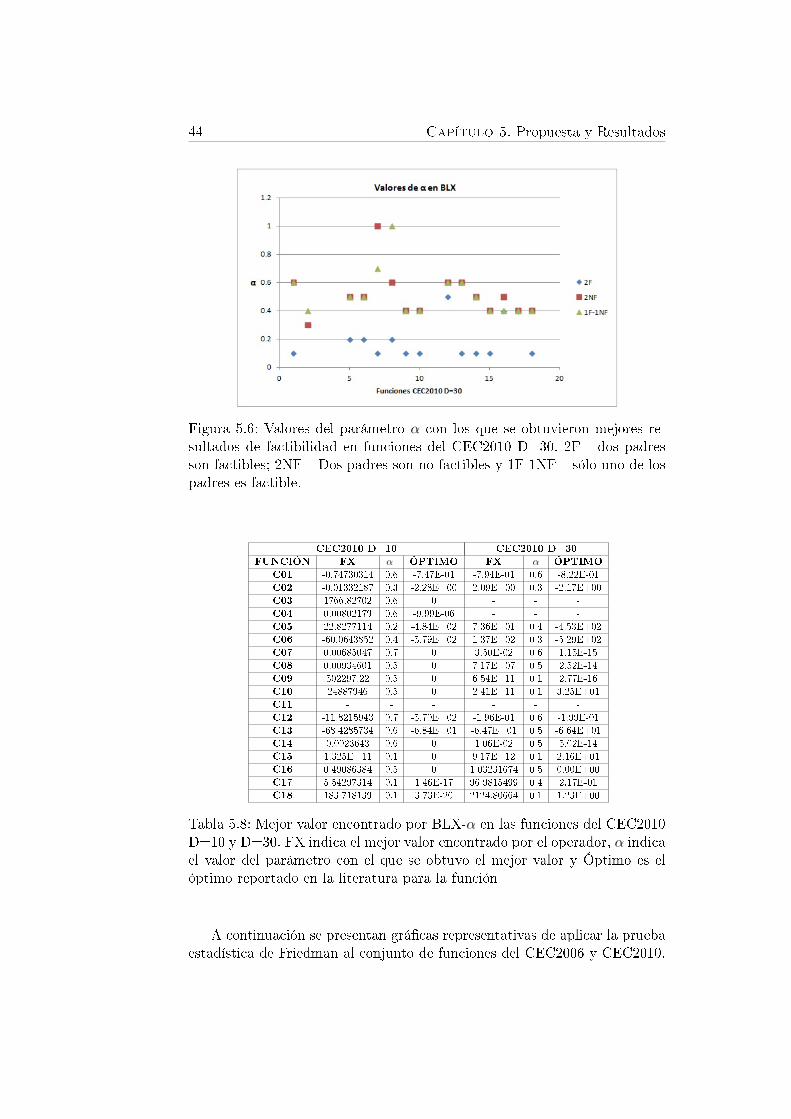
44 Capítulo 5. Propuesta y Resultados
Figura 5.6: Valores del parámetro α con los que se obtuvieron mejores re-sultados de factibilidad en funciones del CEC2010 D=30. 2F= dos padresson factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
CEC2010 D=10 CEC2010 D=30FUNCIÓN FX α ÓPTIMO FX α ÓPTIMO
C01 -0.74730314 0.6 -7.47E-01 -7.94E-01 0.6 -8.22E-01C02 -0.01332187 0.3 -2.28E+00 2.09E+00 0.3 -2.17E+00C03 1766.82702 0.6 0 - - -C04 0.00802179 0.6 -9.99E-06 - - -C05 22.8277114 0.2 -4.84E+02 7.36E+01 0.4 -4.53E+02C06 -60.0643852 0.4 -5.79E+02 1.37E+02 0.3 -5.29E+02C07 0.00685047 0.7 0 3.50E-02 0.6 1.15E-15C08 0.00934601 0.5 0 7.17E+07 0.5 2.52E-14C09 502297.22 0.5 0 6.54E+11 0.1 2.77E-16C10 24887946 0.5 0 2.41E+11 0.1 3.25E+01C11 - - - - - -C12 -11.8215943 0.7 -5.70E+02 -1.96E-01 0.6 -1.99E-01C13 -68.4285734 0.6 -6.84E+01 -6.47E+01 0.5 -6.64E+01C14 0.0023643 0.6 0 1.06E-02 0.5 5.02E-14C15 1.325E+11 0.1 0 9.17E+12 0.1 2.16E+01C16 0.49086384 0.5 0 1.03231674 0.5 0.00E+00C17 5.54297314 0.1 1.46E-17 96.9815499 0.4 2.17E-01C18 183.718139 0.1 3.73E-20 2124.80664 0.1 1.23E+00
Tabla 5.8: Mejor valor encontrado por BLX-α en las funciones del CEC2010D=10 y D=30. FX indica el mejor valor encontrado por el operador, α indicael valor del parámetro con el que se obtuvo el mejor valor y Óptimo es elóptimo reportado en la literatura para la función
A continuación se presentan grá�cas representativas de aplicar la pruebaestadística de Friedman al conjunto de funciones del CEC2006 y CEC2010.

5.4. Resultados obtenidos con BLX-α 45
Las �guras que aparecen en 5.7, como ejemplo, muestran los resultados deaplicar dicha prueba a la función g05 perteneciente al CEC2006. Las �gurasque aparecen en 5.8 presentan el mismo ejercicio pero con la función c02del CEC2010 D=10 y por último las �guras que aparecen en 5.9 muestranresultados de aplicar la prueba a la función c02 del CEC2010 D=30. Cadalinea horizontal en el cuerpo de la grá�ca representa un valor asignado alparámetro del operador. El valor del parámetro que aparece en el títuloindica el valor con el que se obtuvieron mejores resultados de factibilidadpara la función señalada, entonces, tomando como referencia dicho valor secompara éste con los otros valores tomados por el parámetro, ésto, paraidenti�car si existe diferencia signi�cativa entre el valor del parámetro quereportó mejores valores respecto de los otros. En la grá�ca las líneas queaparecen en gris claro señalan valores en el parámetro con los cuales noexiste diferencia signi�cativa respecto del valor con el cual se obtuvieronlos mejores resultados, es decir, se considera que con estos valores en elparámetro se obtienen resultados parecidos a los que se obtuvieron con elvalor reportado como mejor. Así, por ejemplo, la grá�ca 5.7a muestra queen la función g05 se obtuvieron mejores resultados cuando el parámetro αtomó el valor de 0.6, pero los resultados de aplicar la prueba estadísticaa los resultados de factibilidad obtenidos, muestran que la función obtieneresultados similares cuando el parámetro toma valores entre 0.4 y 0.8. Porlo tanto los únicos valores que reportan diferencia signi�cativa es cuando elparámetro toma valores entre 0.1 y 0.3 y 0.9 y 1.0, es decir, los resultados quese obtienen con estos valores de parámetro di�eren a los que se obtuvieroncon el valor de parámetro reportado como mejor.
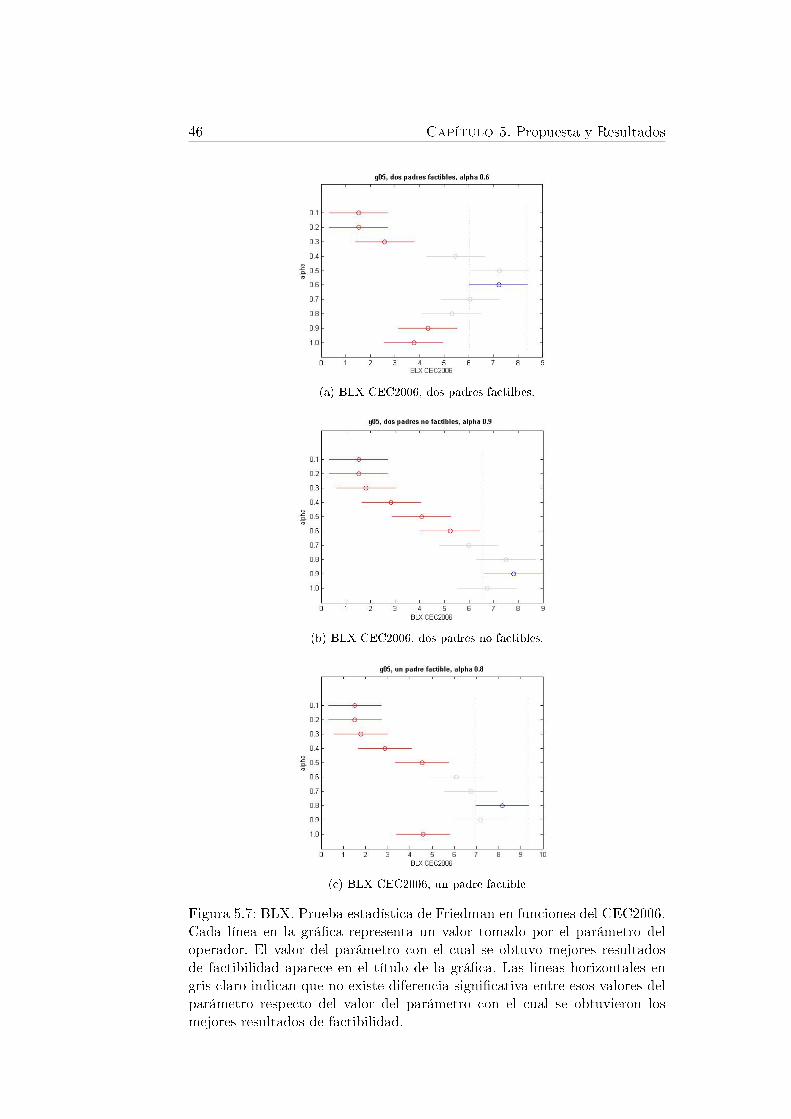
46 Capítulo 5. Propuesta y Resultados
(a) BLX CEC2006, dos padres factilbes.
(b) BLX CEC2006, dos padres no factibles.
(c) BLX CEC2006, un padre factible
Figura 5.7: BLX. Prueba estadística de Friedman en funciones del CEC2006.Cada línea en la grá�ca representa un valor tomado por el parámetro deloperador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.
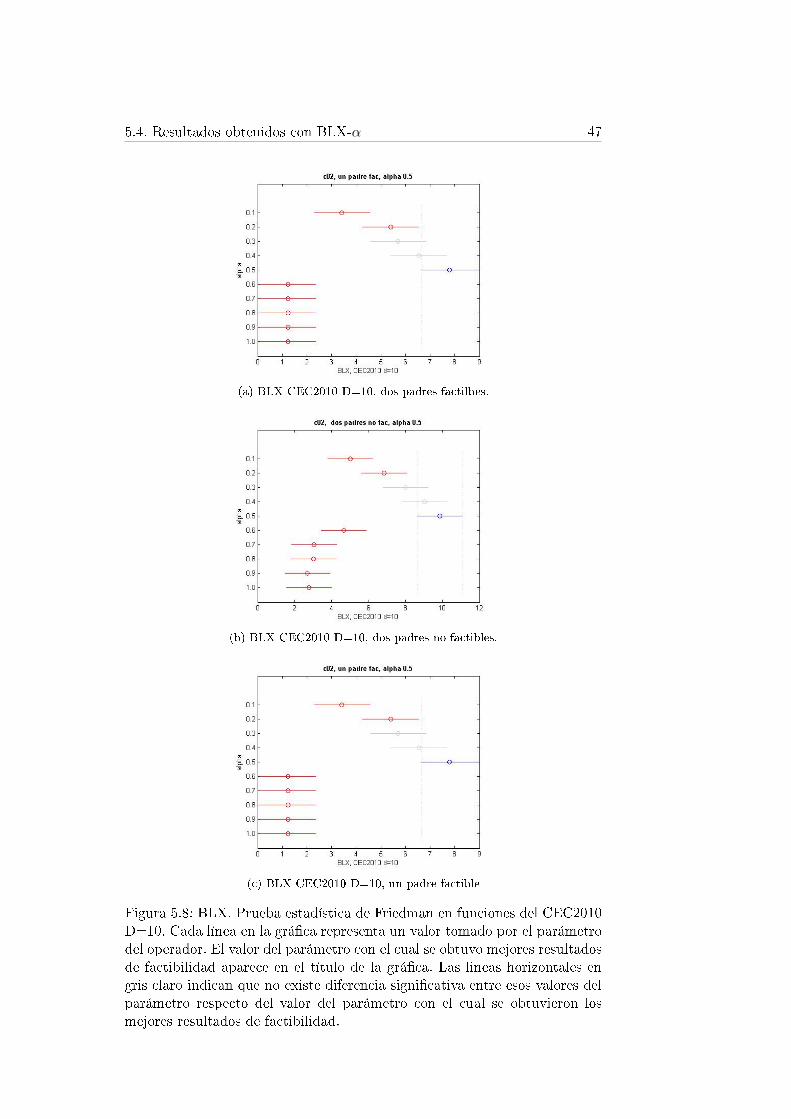
5.4. Resultados obtenidos con BLX-α 47
(a) BLX CEC2010 D=10, dos padres factilbes.
(b) BLX CEC2010 D=10, dos padres no factibles.
(c) BLX CEC2010 D=10, un padre factible
Figura 5.8: BLX. Prueba estadística de Friedman en funciones del CEC2010D=10. Cada línea en la grá�ca representa un valor tomado por el parámetrodel operador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.
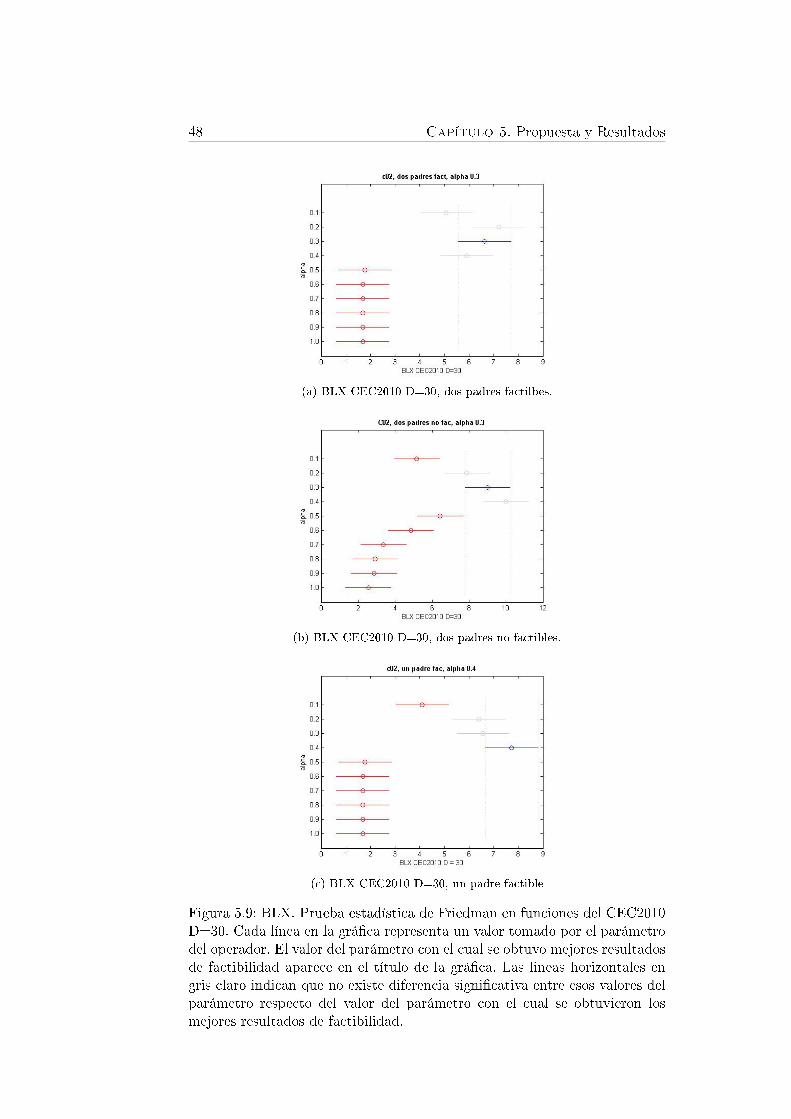
48 Capítulo 5. Propuesta y Resultados
(a) BLX CEC2010 D=30, dos padres factilbes.
(b) BLX CEC2010 D=30, dos padres no factibles.
(c) BLX CEC2010 D=30, un padre factible
Figura 5.9: BLX. Prueba estadística de Friedman en funciones del CEC2010D=30. Cada línea en la grá�ca representa un valor tomado por el parámetrodel operador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.

5.4. Resultados obtenidos con BLX-α 49
5.4.1. Discusión de Resultados BLX-α
Los resultados a partir del conjunto de funciones del CEC2006, Tabla 5.4y Figura 5.1, muestran que cuando los dos padres son factibles, se obtienenporcentajes de factibilidad mayores al 80% en la mayoría de las funcionescon valores de α menor o igual a 0.5. La columna que indica los valores delparámetro en los cuales no existe diferencia signi�cativa, muestra que valoresentre 0.4 y 0.7, principalmente, son buenos para generar mayor número desoluciones factibles cuando los dos padres son factibles también 5.2. LasFiguras que aparecen en 5.7 ejempli�can el comportamiento de las funcionesdel CEC2006 al aplicar la prueba de Friedman, se ve en la �gura que para lafunción g05, en este ejemplo, se pre�eren valores en el parámetro alrededorde 0.5 cuando los dos padres son factibles y valores cercanos a 1 cuando losdos padres son no factibles o sólo un padre es factible.
Por otro lado, cuando los dos padres son no factibles, el porcentaje defactibilidad es muy pequeño ya que alcanza valores menores o igual al 5%,cuando sólo uno de los padres es factible el porcentaje de factibilidad aumen-ta y alcanza cerca del 20% 5.1. De acuerdo al comportamiento del operador,sus autores mencionan que cuando el parámetro toma valores menores a 0.5se tiende a crear hijos muy cerca de los padres y por lo tanto a explotar elespacio de búsqueda, cuando los valores son mayores a 0.5 los hijos se gene-ran más alejados de los padres y por lo tanto tienden a explorar el espaciode búsqueda. Es interesante como en estos dos casos, los valores del paráme-tro con el que se alcanzan los mejores porcentajes de factibilidad están porarriba de 0.5 5.2, lo que indica que cuando la región factible es muy pequeñao el algoritmo se encuentra en sus primeros ciclos de evolución, el operadornecesita mayor poder de exploración para alcanzar la zona factible. Una vezalcanzada esta zona, lo que se requiere es dar saltos más pequeños para ex-plotarla por completo y no salirse de ella, lo que se comprueba cuando los dospadres son factibles, ya que observando los resultados de la Tabla 5.4, 5.6y 5.7, vemos que el porcentaje de factibilidad es mayor con valores de αmenores o igual a 0.5. Los resultados en la columna de estadísticas mues-tran que efectivamente se pre�eren valores menores a 0.5, principalmente enlas funciones del CEC2010, para generar mayor porcentaje de factibilidadcuando los dos padres son no factibles o sólo alguno de ellos lo es.
El patrón se repite en las funciones del benchmark del CEC2010, Ta-blas 5.6 y 5.7, para la mayoría de funciones, cuando los dos padres sonfactibles se alcanza un porcentaje de factibilidad mayor al 80% 5.3, 5.4 ladiferencia respecto los resultados del benchmark del CEC2006 es que en el delCEC2010 estos valores se alcanzan con valores del parámetro estrictamentemenores a 0.5, lo cual se con�rma con los resultados de la prueba estadís-tica dónde indica que valores bajos del parámetro mejoran la obtención desoluciones factibles. Las grá�cas que se muestran en 5.8 y 5.9 muestran losresultados de la prueba estadística de Friedman para la función C02 del
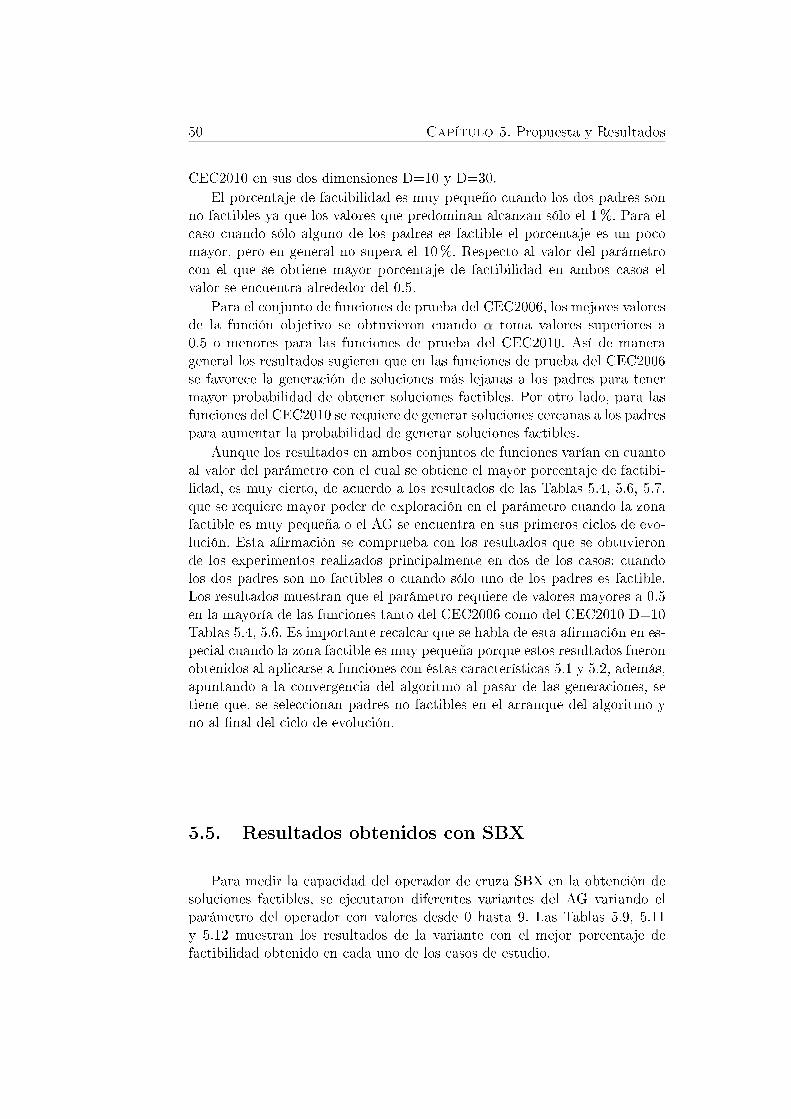
50 Capítulo 5. Propuesta y Resultados
CEC2010 en sus dos dimensiones D=10 y D=30.El porcentaje de factibilidad es muy pequeño cuando los dos padres son
no factibles ya que los valores que predominan alcanzan sólo el 1%. Para elcaso cuando sólo alguno de los padres es factible el porcentaje es un pocomayor, pero en general no supera el 10%. Respecto al valor del parámetrocon el que se obtiene mayor porcentaje de factibilidad en ambos casos elvalor se encuentra alrededor del 0.5.
Para el conjunto de funciones de prueba del CEC2006, los mejores valoresde la función objetivo se obtuvieron cuando α toma valores superiores a0.5 o menores para las funciones de prueba del CEC2010. Así de manerageneral los resultados sugieren que en las funciones de prueba del CEC2006se favorece la generación de soluciones más lejanas a los padres para tenermayor probabilidad de obtener soluciones factibles. Por otro lado, para lasfunciones del CEC2010 se requiere de generar soluciones cercanas a los padrespara aumentar la probabilidad de generar soluciones factibles.
Aunque los resultados en ambos conjuntos de funciones varían en cuantoal valor del parámetro con el cual se obtiene el mayor porcentaje de factibi-lidad, es muy cierto, de acuerdo a los resultados de las Tablas 5.4, 5.6, 5.7,que se requiere mayor poder de exploración en el parámetro cuando la zonafactible es muy pequeña o el AG se encuentra en sus primeros ciclos de evo-lución. Esta a�rmación se comprueba con los resultados que se obtuvieronde los experimentos realizados principalmente en dos de los casos: cuandolos dos padres son no factibles o cuando sólo uno de los padres es factible.Los resultados muestran que el parámetro requiere de valores mayores a 0.5en la mayoría de las funciones tanto del CEC2006 como del CEC2010 D=10Tablas 5.4, 5.6. Es importante recalcar que se habla de esta a�rmación en es-pecial cuando la zona factible es muy pequeña porque estos resultados fueronobtenidos al aplicarse a funciones con éstas características 5.1 y 5.2, además,apuntando a la convergencia del algoritmo al pasar de las generaciones, setiene que, se seleccionan padres no factibles en el arranque del algoritmo yno al �nal del ciclo de evolución.
5.5. Resultados obtenidos con SBX
Para medir la capacidad del operador de cruza SBX en la obtención desoluciones factibles, se ejecutaron diferentes variantes del AG variando elparámetro del operador con valores desde 0 hasta 9. Las Tablas 5.9, 5.11y 5.12 muestran los resultados de la variante con el mejor porcentaje defactibilidad obtenido en cada uno de los casos de estudio.

5.5. Resultados obtenidos con SBX 51
2F 2NF 1F-1NF FFFUNCIÓN %F η NE %F η NE %F η NE %F η NE
G01 0.988341 2 0-2 0.000122 0 0-3 0.011267 0 0-2 0.990885 1 0-2G03 0.903383 1 0-7 0.001263 0 0-1 0.046336 0 0-1 0.913692 1 0-7G05 0.827250 0 0-1 0.000787 0 0-1 0.053294 0 0-1 0.881331 0 0-1G06 0.997644 3 3-5 0.013611 0 0-2 0.179443 0 0-2 0.998005 3 3-5G07 0.804351 0 0 0.000302 0 0 0.034774 0 0 0.839428 0 0G10 0.844778 0 0-1, 4 0.000434 0 0-1 0.044174 0 0-1 0.889386 0 0-1,4G11 0.987371 2 2-9 0.001314 0 0-1 0.057340 1 0-1 0.992697 2 -G13 0.854941 1 0-2 0.000462 0 0-1 0.046842 0 0-1 0.895853 0 0-1G14 0.795039 0 0-1 0.000476 0 0-1 0.044483 0 0-1 0.839997 0 0-1G15 0.972038 1 0-4 0.000956 0 0-2 0.055419 0 0-2 0.982347 1 0-1G16 0.952837 1 0-4 0.000288 0 0-1 0.026326 0 0-1 0.961685 1 0-3G17 0.683909 0 0 0.000348 0 0 0.035656 0 0 0.719913 0 0G18 0.372982 0 0 0.000229 0 0 0.020129 0 0 0.393341 0 0G23 0.172742 0 0 0.000573 0 0 0.013262 0 0 0.186577 0 0
Tabla 5.9: SBX CEC2006. Porcentajes de Factibilidad obtenidos en los trescasos de estudio.
La Figura 5.10 muestra grá�camente el comportamiento del operador encuanto a la generación de soluciones factibles, la Figura 5.11 muestra losvalores del parámetro en el operador con los cuales se alcanzaron los mejoresresultados de factibilidad.
Figura 5.10: Factibilidad generada por BLX en el CEC2006 cuando: 2F=dos padres son factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólouno de los padres es factible.
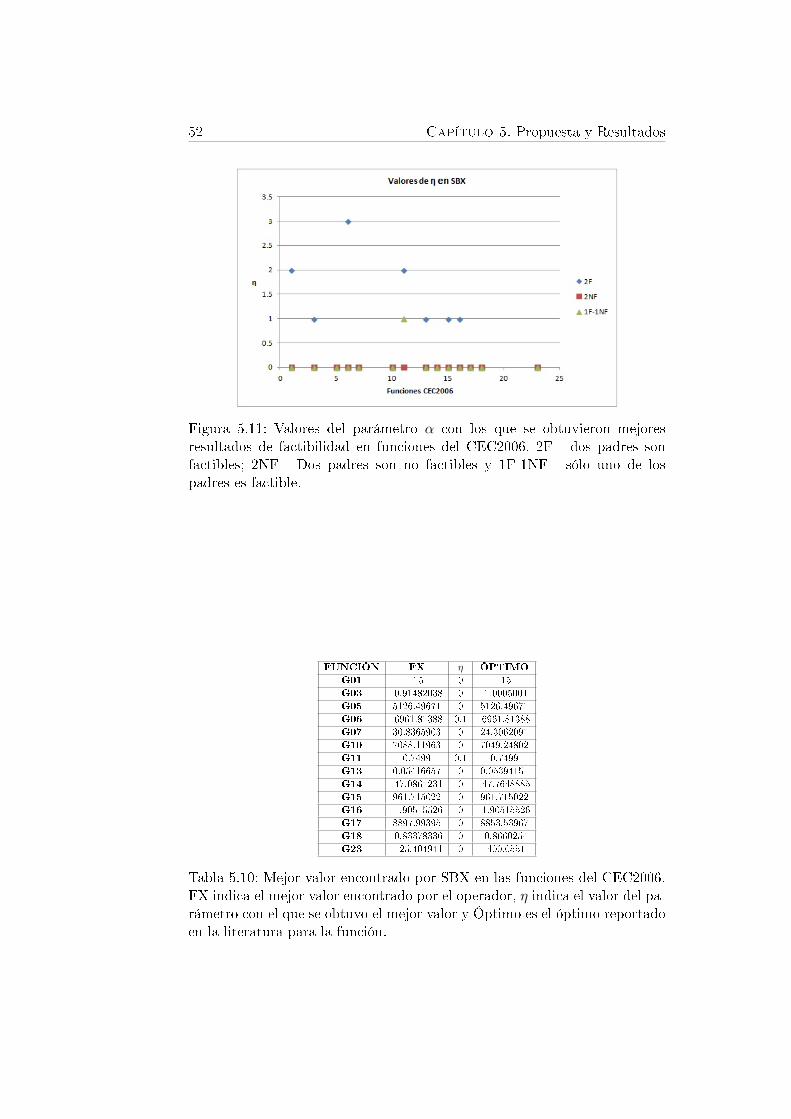
52 Capítulo 5. Propuesta y Resultados
Figura 5.11: Valores del parámetro α con los que se obtuvieron mejoresresultados de factibilidad en funciones del CEC2006. 2F= dos padres sonfactibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
FUNCIÓN FX η ÓPTIMOG01 -15 0 -15G03 -0.91482038 0 -1.0005001G05 5126.49671 0 5126.49671G06 -6961.81388 0,1 -6961.81388G07 30.8365903 0 24.3062091G10 7088.11963 0 7049.24802G11 0.7499 0,1 0.7499G13 0.05416657 0 0.05394151G14 -47.0861231 0 -47.7648885G15 961.715022 0 961.715022G16 -1.90515526 0 -1.90515526G17 8897.99395 0 8853.53967G18 -0.83378336 0 -0.8660254G23 -125.404941 0 -400.0551
Tabla 5.10: Mejor valor encontrado por SBX en las funciones del CEC2006.FX indica el mejor valor encontrado por el operador, η indica el valor del pa-rámetro con el que se obtuvo el mejor valor y Óptimo es el óptimo reportadoen la literatura para la función.
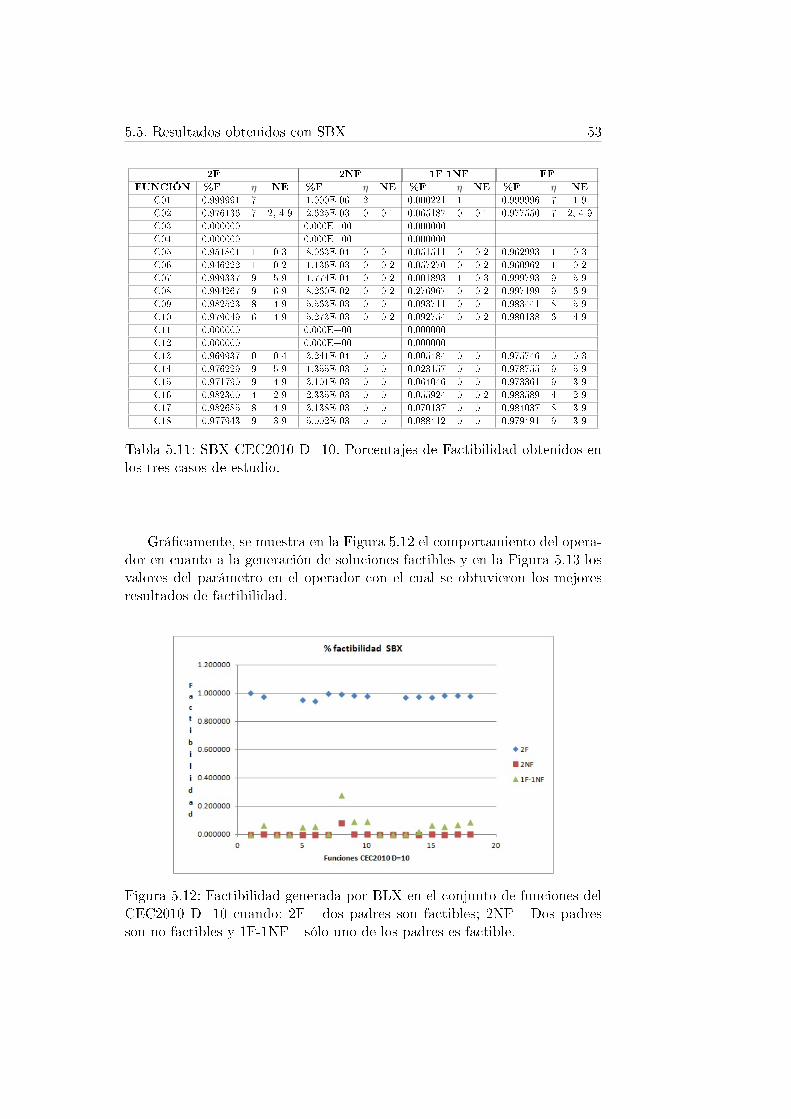
5.5. Resultados obtenidos con SBX 53
2F 2NF 1F-1NF FFFUNCIÓN %F η NE %F η NE %F η NE %F η NE
C01 0.999991 7 - 1.000E-06 2 - 0.000221 1 - 0.999996 7 1-9C02 0.976136 7 2, 4-9 2.625E-03 0 0-1 0.065187 0 0-1 0.977550 7 2, 4-9C03 0.000000 - - 0.000E+00 - - 0.000000 - - - - -C04 0.000000 - - 0.000E+00 - - 0.000000 - - - - -C05 0.951801 1 0-3 8.063E-04 0 0-1 0.051511 0 0-2 0.962993 1 0-3C06 0.946222 1 0-2 1.136E-03 0 0-2 0.057270 0 0-2 0.960962 1 0-2C07 0.999337 9 5-9 1.774E-04 0 0-2 0.001893 1 0-3 0.999793 9 5-9C08 0.994267 9 6-9 8.260E-02 0 0-2 0.276967 0 0-2 0.997199 9 6-9C09 0.982523 8 4-9 5.563E-03 0 0-1 0.093711 0 0-1 0.983441 8 5-9C10 0.979049 6 4-9 5.273E-03 0 0-2 0.092754 0 0-2 0.980138 6 4-9C11 0.000000 - - 0.000E+00 - - 0.000000 - - - - -C12 0.000000 - - 0.000E+00 - - 0.000000 - - - - -C13 0.969937 0 0-4 3.241E-04 0 0-1 0.005484 0 0-1 0.975746 0 0-3C14 0.976229 9 5-9 1.355E-03 0 0-1 0.023157 0 0-1 0.978755 9 5-9C15 0.971790 9 4-9 3.101E-03 0 0-1 0.064046 0 0-1 0.973361 9 3-9C16 0.982300 4 2-9 2.335E-03 0 0-1 0.055924 0 0-2 0.983589 4 2-9C17 0.982685 8 4-9 3.138E-03 0 0-1 0.070137 0 0-1 0.984037 8 3-9C18 0.977943 9 3-9 5.002E-03 0 0-1 0.088412 0 0-1 0.979491 9 3-9
Tabla 5.11: SBX CEC2010 D=10. Porcentajes de Factibilidad obtenidos enlos tres casos de estudio.
Grá�camente, se muestra en la Figura 5.12 el comportamiento del opera-dor en cuanto a la generación de soluciones factibles y en la Figura 5.13 losvalores del parámetro en el operador con el cual se obtuvieron los mejoresresultados de factibilidad.
Figura 5.12: Factibilidad generada por BLX en el conjunto de funciones delCEC2010 D=10 cuando: 2F= dos padres son factibles; 2NF= Dos padresson no factibles y 1F-1NF= sólo uno de los padres es factible.
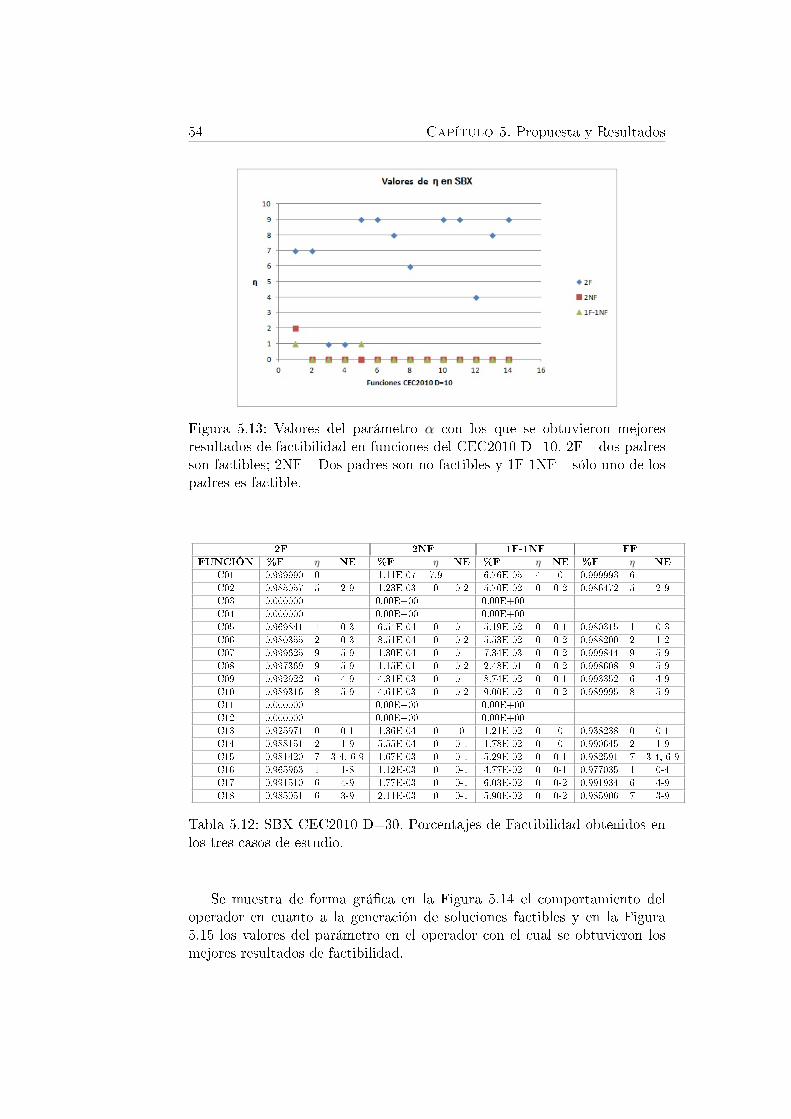
54 Capítulo 5. Propuesta y Resultados
Figura 5.13: Valores del parámetro α con los que se obtuvieron mejoresresultados de factibilidad en funciones del CEC2010 D=10. 2F= dos padresson factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
2F 2NF 1F-1NF FFFUNCIÓN %F η NE %F η NE %F η NE %F η NE
C01 0.999990 0 - 1.11E-07 7,9 - 6.76E-05 4 0 0.999993 6 -C02 0.985057 5 2-9 1.23E-03 0 0-2 5.70E-02 0 0-2 0.986472 5 2-9C03 0.000000 - - 0.00E+00 - - 0.00E+00 - - - - -C04 0.000000 - - 0.00E+00 - - 0.00E+00 - - - - -C05 0.969841 1 0-3 6.54E-04 0 0-1 5.19E-02 0 0-1 0.980315 1 0-3C06 0.980355 2 0-3 8.51E-04 0 0-2 5.53E-02 0 0-2 0.988200 2 1-2C07 0.999625 9 5-9 1.30E-04 0 0-1 7.34E-03 0 0-2 0.999844 9 5-9C08 0.997369 9 5-9 1.15E-01 0 0-2 2.48E-01 0 0-2 0.998608 9 5-9C09 0.992922 6 4-9 4.31E-03 0 0-1 8.74E-02 0 0-1 0.993352 6 4-9C10 0.989316 8 5-9 4.61E-03 0 0-2 9.00E-02 0 0-2 0.989995 8 5-9C11 0.000000 - - 0.00E+00 - - 0.00E+00 - - - - -C12 0.000000 - - 0.00E+00 - - 0.00E+00 - - - - -C13 0.925971 0 0-1 1.36E-04 0 0 1.21E-02 0 0 0.938238 0 0-1C14 0.988151 2 1-9 5.55E-04 0 0-1 1.78E-02 0 0 0.990645 2 1-9C15 0.981420 7 3-4, 6-9 1.67E-03 0 0-1 5.29E-02 0 0-1 0.982591 7 3-4, 6-9C16 0.965963 1 1-8 1.12E-03 0 0-1 4.77E-02 0 0-1 0.977035 1 0-4C17 0.991510 6 4-9 1.77E-03 0 0-1 6.03E-02 0 0-2 0.991934 6 4-9C18 0.985051 6 3-9 2.11E-03 0 0-1 5.90E-02 0 0-2 0.985906 7 3-9
Tabla 5.12: SBX CEC2010 D=30. Porcentajes de Factibilidad obtenidos enlos tres casos de estudio.
Se muestra de forma grá�ca en la Figura 5.14 el comportamiento deloperador en cuanto a la generación de soluciones factibles y en la Figura5.15 los valores del parámetro en el operador con el cual se obtuvieron losmejores resultados de factibilidad.
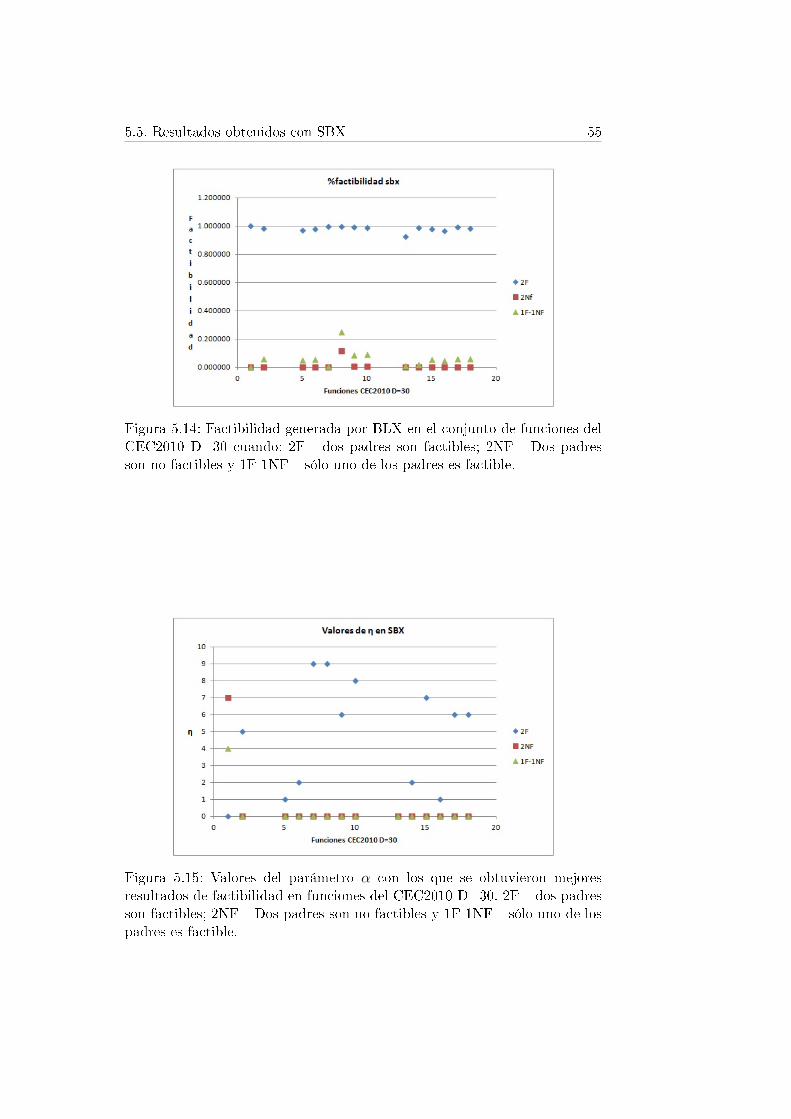
5.5. Resultados obtenidos con SBX 55
Figura 5.14: Factibilidad generada por BLX en el conjunto de funciones delCEC2010 D=30 cuando: 2F= dos padres son factibles; 2NF= Dos padresson no factibles y 1F-1NF= sólo uno de los padres es factible.
Figura 5.15: Valores del parámetro α con los que se obtuvieron mejoresresultados de factibilidad en funciones del CEC2010 D=30. 2F= dos padresson factibles; 2NF= Dos padres son no factibles y 1F-1NF= sólo uno de lospadres es factible.
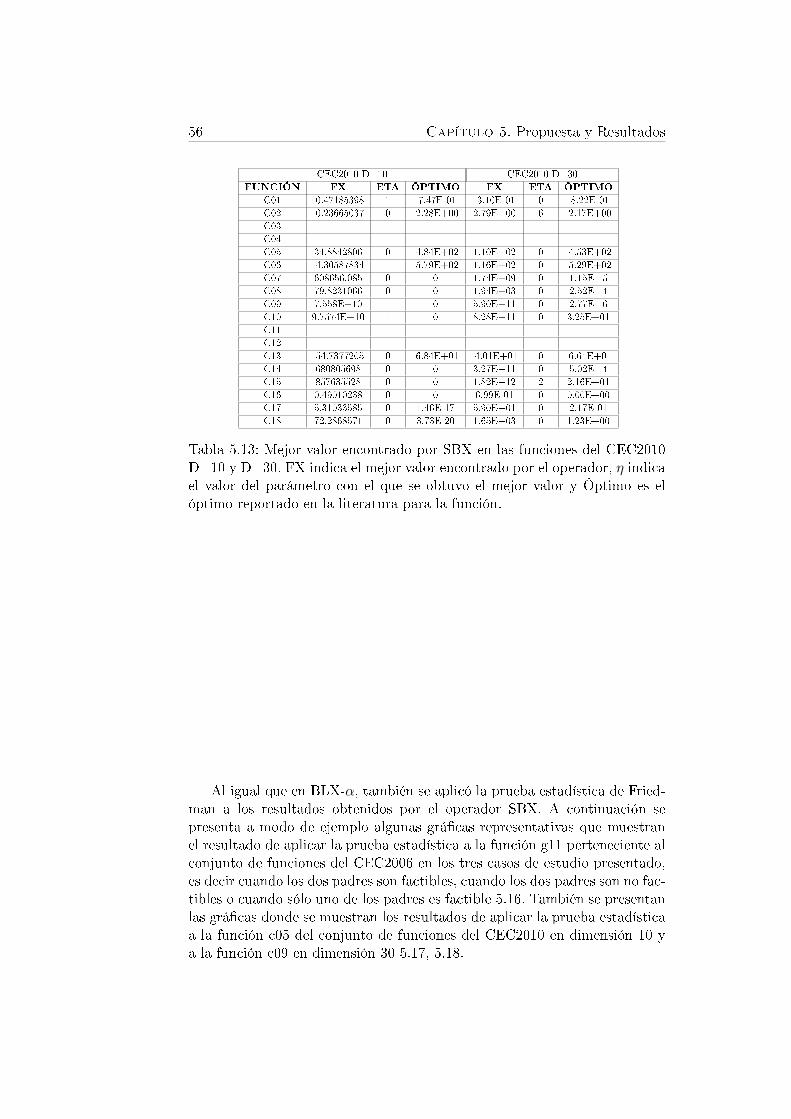
56 Capítulo 5. Propuesta y Resultados
CEC2010 D=10 CEC2010 D=30FUNCIÓN FX ETA ÓPTIMO FX ETA ÓPTIMO
C01 -0.47185398 1 -7.47E-01 -3.10E-01 0 -8.22E-01C02 -0.23665037 0 -2.28E+00 2.79E+00 6 -2.17E+00C03 - - - - - -C04 - - - - - -C05 34.8842806 0 -4.84E+02 1.10E+02 0 -4.53E+02C06 -4.30587834 1 -5.79E+02 1.16E+02 0 -5.29E+02C07 608656.085 0 0 1.74E+09 0 1.15E-15C08 79.8231066 0 0 1.94E+03 0 2.52E-14C09 7.558E+10 1 0 5.90E+11 0 2.77E-16C10 9.7574E+10 1 0 8.28E+11 0 3.25E+01C11 - - - - - -C12 - - - - - -C13 -54.7377205 0 -6.84E+01 -4.01E+01 0 -6.64E+01C14 680805698 0 0 3.27E+11 0 5.02E-14C15 857635528 0 0 1.82E+12 2 2.16E+01C16 0.49010238 0 0 6.99E-01 0 0.00E+00C17 5.31033585 0 1.46E-17 5.90E+01 0 2.17E-01C18 72.2868571 0 3.73E-20 1.65E+03 0 1.23E+00
Tabla 5.13: Mejor valor encontrado por SBX en las funciones del CEC2010D=10 y D=30. FX indica el mejor valor encontrado por el operador, η indicael valor del parámetro con el que se obtuvo el mejor valor y Óptimo es elóptimo reportado en la literatura para la función.
Al igual que en BLX-α, también se aplicó la prueba estadística de Fried-man a los resultados obtenidos por el operador SBX. A continuación sepresenta a modo de ejemplo algunas grá�cas representativas que muestranel resultado de aplicar la prueba estadística a la función g11 perteneciente alconjunto de funciones del CEC2006 en los tres casos de estudio presentado,es decir cuando los dos padres son factibles, cuando los dos padres son no fac-tibles o cuando sólo uno de los padres es factible 5.16. También se presentanlas grá�cas donde se muestran los resultados de aplicar la prueba estadísticaa la función c05 del conjunto de funciones del CEC2010 en dimensión 10 ya la función c09 en dimensión 30 5.17, 5.18.
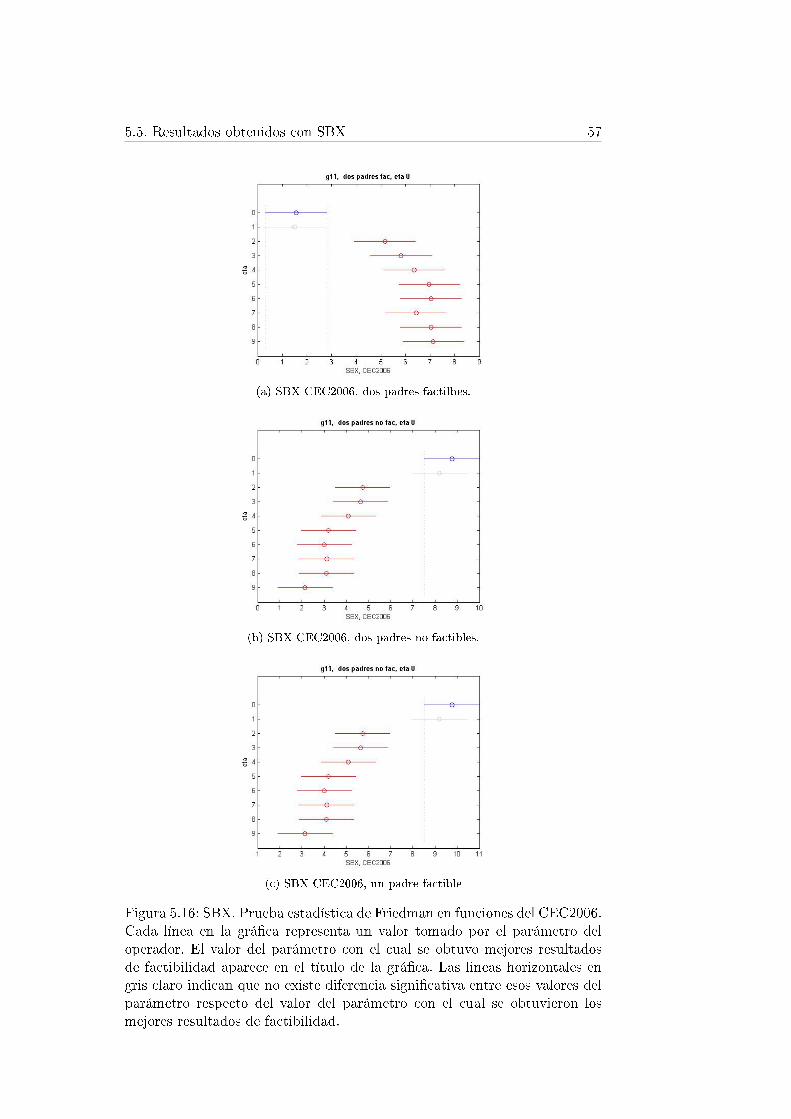
5.5. Resultados obtenidos con SBX 57
(a) SBX CEC2006, dos padres factilbes.
(b) SBX CEC2006, dos padres no factibles.
(c) SBX CEC2006, un padre factible
Figura 5.16: SBX. Prueba estadística de Friedman en funciones del CEC2006.Cada línea en la grá�ca representa un valor tomado por el parámetro deloperador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.

58 Capítulo 5. Propuesta y Resultados
(a) SBX CEC2010 D=10, dos padres factilbes.
(b) SBX CEC2010 D=10, dos padres no factibles.
(c) SBX CEC2010 D=10, un padre factible
Figura 5.17: SBX. Prueba estadística de Friedman en funciones del CEC2010D=10. Cada línea en la grá�ca representa un valor tomado por el parámetrodel operador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.

5.5. Resultados obtenidos con SBX 59
(a) SBX CEC2010 D=30, dos padres factilbes.
(b) SBX CEC2010 D=30, dos padres no factibles.
(c) SBX CEC2010 D=30, un padre factible
Figura 5.18: SBX. Prueba estadística de Friedman en funciones del CEC2010D=30. Cada línea en la grá�ca representa un valor tomado por el parámetrodel operador. El valor del parámetro con el cual se obtuvo mejores resultadosde factibilidad aparece en el título de la grá�ca. Las lineas horizontales engris claro indican que no existe diferencia signi�cativa entre esos valores delparámetro respecto del valor del parámetro con el cual se obtuvieron losmejores resultados de factibilidad.
60 Capítulo 5. Propuesta y Resultados
5.5.1. Discusión de Resultados SBX
En las funciones del CEC2006, el porcentaje de factibilidad obtenido porSBX es similar al que muestra BLX-α cuando los dos padres son factibles,se puede ver en la Tabla 5.9 y en la Figura 5.10 que el porcentaje superael 80% en la mayoría de las funciones. Respecto al valor del parámetro conel que se obtuvieron los mejores valores se puede observar en la Tabla 5.9 yen la Figura 5.11 que éstos son obtenidos cuando el parámetro toma valoresmenores o iguales a 2, las pruebas estadísticas nos ayudan a con�rmar quecon valores cercanos a 0 es posible obtener mayor porcentaje de solucionesfactibles cuando ambos padres son factibles. El conjunto de �guras que apa-recen en 5.16 muestran ejemplos de la prueba de Friedman aplicada a lafunción g11, se observa la preferencia de valores menores en el parámetrorespecto de valores altos.
Para el caso del conjunto de funciones de prueba del CEC2010 el com-portamiento de SBX se asimila al de BLX-α en cuanto a que el porcentajede factibilidad cuando los dos padres son factibles supera el 80%, en ambasdimensiones D=10 y D=30. De acuerdo a los resultados de las Tablas 5.11,5.12 y a las Figuras 5.12, 5.14 y 5.13, 5.15 los mejores valores fueron obte-nidos cuando el valor del parámetro toma valores menores a 2 o superioresa 5, y aunque la prueba estadística no muestra con claridad la ventaja dealgún valor en particular, si queda claro que valores mayores a 2 resultanbuenos para obtener mayor número de soluciones factibles cuando los dospadres son factibles.
Cuando los dos padres son no factibles o sólo uno de ellos lo es, el por-centaje de factibilidad se reduce considerablemente principalmente cuandolos dos padres son no factibles ya que no se alcanza ni el 1%. Cuando sólouno de los padres es factible, el porcentaje de factibilidad alcanza y superaen algunas ocasiones el 5%. Vale la pena destacar que en estos puntos, losvalores del parámetro que logran alcanzar mayor número de soluciones fac-tibles son menores a 2, especialmente cuando toma el valor de 0, aunque losresultados de la prueba estadística indican que valores entre 0 y 2 son buenospara alcanzar mayor número de soluciones factibles. Las grá�cas de la prue-ba estadística de Friedman que aparecen en 5.17 y 5.18 son un ejemplo delcomportamiento del parámetro en las funciones del CEC2010, en las cualesse observa que existe diferencia signi�cativa entre valores menores a 2 en elparámetro en comparación con valores más grandes.
Los mejores valores obtenidos para las funciones tanto del CEC2006 co-mo del CEC2010 se obtienen cuando el parámetro toma valores de 0 y 1 deacuerdo con los resultados de las Tablas 5.10, 5.13, indicando que en proble-mas de optimización con restricciones, para este operador, el generar hijosmás alejados de los padres es más conveniente y por lo tanto se requiere máspoder de exploración en el operador para intentar converger hacia el óptimode la función. En funciones del CEC2006 se alcanzó el óptimo en la mitad

5.5. Resultados obtenidos con SBX 61
de las funciones, mientras que en funciones del CEC2010 los resultados sonmuy pobres, ya que en la mayoría de las funciones no se alcanza el óptimo.
Tomando en cuenta lo reportado por los autores en [13] y [14] que valorespequeños del operador permiten generar hijos más alejados de los padres yvalores grandes hijos más cerca a éstos, nuevamente se cumple que este ope-rador también requiere mayor poder de exploración cuando la zona factiblees muy pequeña o el algoritmo inicia el proceso de evolución. Esta conclusiónse demostró a partir de los resultados que aparecen en las tablas 5.9, 5.11 y5.12, especialmente cuando los dos padres son no factibles o sólo uno de lospadres es factible. Se observa en esas tablas que valores entre 0 y 1 producenmejores resultados, tales valores demuestran preferencia por la generaciónde hijos alejados de los padres y al pertenecer a los casos de selección depadres no factibles indica que el algoritmo no ha convergido aún a la zonafactible ya sea porque ésta es muy pequeña de acuerdo al tipo de problemasseleccionados 5.1 y 5.2 o porque se encuentra en las primeras generacionesdel ciclo evolutivo.


Capítulo 6
Conclusiones
Resumen: Las conclusiones obtenidas a partir de los resultados se
mencionan en este capítulo, además, a partir de éstas, se establecen
posibles trabajos futuros que tomarán como base este estudio.
6.1. Conclusiones respecto del operador de cruzaBLX-α
Los autores de este operador [18], mencionan en su publicación, que cuan-do el parámetro toma valores mayores a 0.5 existe mayor probabilidad deexploración en el operador, lo contrario cuando toma valores menores a 0.5;por lo tanto, sugieren que un valor de 0.5 ofrecería las mismas probabilidadespara explorar y explotar el espacio de búsqueda y por lo tanto recomiendantomar este valor como base.De acuerdo a los resultados que se obtuvieron en este trabajo en las funcionesdel CEC2006 y las validaciones a partir de la prueba estadística de Friedmancon�rmamos lo dicho por los autores, ya que se obtuvo mayor porcentaje defactibilidad cuando el parámetro tomó valores alrededor de 0.5, aunque seobserva más cuando los dos padres son factibles. Para el caso en el que losdos padres son no factibles o sólo uno de los padres lo es, la tendencia deloperador es obtener mejores resultados cuando el parámetro toma valorespromedio entre 0.5 y 1.0, favoreciendo así la capacidad de exploración en eloperador.En las funciones del CEC2010 los resultados favorecen a valores pequeñospara el parámetro. Valores menores a 0.5 aumentan la posibilidad de generarmayor porcentaje de factibilidad al operador en los tres casos de estudio, esdecir, cuando los dos padres son factibles, los dos padres son no factibles ycuando sólo un padres es factible; sin embargo, se ve nuevamente la tenden-cia del parámetro de tomar valores más grandes cuando se tiene a los dos
63
64 Capítulo 6. Conclusiones
padres no factibles o sólo alguno de ellos lo es.Para ambos conjuntos de funciones, aunque un valor alrededor de 0.5 en el
parámetro genera buenos resultados, de acuerdo a lo presentado en la secciónde resultados, tener un grado de exploración mayor al inicio del proceso deevolución y disminuir éste conforme se avance en las generaciones ayudaríamuy probablemente a obtener mejores resultados. Los valores recomendadospara el parámetro α en este tipo de funciones estaría comprendido entre elrango 0.3 y 0.7.
6.2. Conclusiones respecto del operador de cruzaSBX
Los autores [13], proponen este operador con el objetivo de simular elcomportamiento de la cruza binaria de un punto ahora en espacios continuos,ellos mencionan que valores del parámetro entre 2 y 5 simulan con mayorexactitud este comportamiento. Por lo tanto de acuerdo al objetivo inicialdel parámetro los autores recomiendan el uso de estos valores.
En las funciones del CEC2006 los resultados muestran que valores entre 2y 5 podrían servir en el caso de que los dos padres a cruzarse fueran factibles,aunque valores entre 0 y 1 obtienen mejores resultados �nales al optimizarla función objetivo, lo cual coincide para los casos en que los dos padres sonno factibles o sólo hay un padre factible, ya que los mejores resultados encuanto a factibilidad se obtuvieron cuando el parámetro del operador tomavalores cercanos al 0.
Los resultados de las funciones del CEC2010 muestran que valores mayo-res a 5 generan buenos resultados cuando los dos padres son factibles, pero elpatrón se repite nuevamente favoreciendo a valores del parámetro cercanosa 0 cuando los dos padres son no factibles o solo hay un padre factible enla pareja. Incluso el mejor valor en la función objetivo (ver Tabla 5.13 en lasección de resultados) es obtenido cuando el parámetro toma valores entre 0y 1, por lo tanto, se recomienda utilizar el rango entre 0 y 2 para problemassimilares a los que se usaron en este experimento.
Los autores mencionan que cuando el operador toma valores muy pe-queños, los hijos se generarán más alejados de los padres y con valores muygrandes, los hijos se generarán cada vez más cerca de los padres. Con esteprincipio se con�rma, al igual que en el operador BLX-α, que se necesitamayor capacidad de exploración en el operador al inicio del proceso de evo-lución o cuando la región factible es muy pequeña, esto se comprueba porlos resultados obtenidos cuando los dos padres son no factibles o cuando solouno de ellos lo es.
Tomando en cuenta la hipótesis propuesta, se tiene que, en efecto, elvalor del parámetro sugerido por los autores en espacios sin restricciones,

6.3. Trabajo Futuro 65
para estos dos operadores, no proporciona los mejores resultados en espaciosrestringidos. En el caso de BLX-α el autor sugiere un valor de α = 0.5, deacuerdo a los resultados se sugieren valores alrededor de 0.5 en el parámetroy de manera más precisa, de acuerdo a los resultados obtenidos en la funciónobjetivo del CEC2006 y CEC2010 D=10 un valor de 0.6 o 0.7 en problemassujetos a restricciones. Para SBX se observó que se obtienen mejores resul-tados con valores del parámetro cercanos a 0, y no necesariamente entre 2 y5. Finalmente, contrastando la idea general de asociar al operador de cruzacon la explotación del espacio de búsqueda, al menos con los dos operadoresanalizados en este trabajo y para espacios restringidos, se observa que se re-quiere un comportamiento de exploración también, para efectos de mejorarla capacidad de encontrar soluciones factibles.La Tabla 6.1 muestra cuales son los valores recomendados en la literaturapara el parámetro del operador en Problemas de Optimización Numérica sinRestricciones y los valores que de acuerdo a los resultados obtenidos en estetrabajo se sugieren para el operador en Problemas de Optimización Numéricacon Restricciones.
Sin Restricciones Con RestriccionesOperador Valor valorBLX-α 0.5 0.3-0.7SBX 2-5 0-2
Tabla 6.1: Valores sugeridos para los operadores de cruza en espacios sinrestricciones y en espacios con restricciones.
6.3. Trabajo Futuro
Derivado de los resultados obtenidos en este trabajo de tesis se proponeel diseño de esquemas dinámicos, adaptativos e incluso auto-adaptativos,para manejar los parámetros de los dos operadores de cruza, de maneraque se favorezca su comportamiento de exploración-explotación. De manerageneral, en el caso del operador de cruza BLX-α se puede iniciar el procesode evolución con valores de 0.7 en su parámetro y disminuir este valor deacuerdo a un criterio previamente establecido, o incluso, de alguna maneramedir la distancia de la población respecto de la zona factible y de acuerdoa esta distancia disminuir el valor del parámetro hasta que el parámetroalcance el valor de 0.3.
Otra línea futura de investigación es el diseño, a partir de los operadoresde cruza aquí analizados, de un operador especial que garantice la factibi-lidad del descendiente a partir de dos padres factibles, o que garantice lafactibilidad de un descendiente a partir de padres ligeramente infactibles.
Finalmente, se podría diseñar una métrica que estime el progreso a nivelde población generado a partir de la aplicación del operador de cruza, donde
66 Capítulo 6. Conclusiones
se considere no tan sólo la factibilidad de las soluciones, sino su mejora enel valor de la función objetivo.
Parte I
Apéndices

Apéndice A
Apéndice
Resumen: En este apartado se muestran de forma detallada los re-
sultados obtenidos en cada uno de los tres casos presentados en la
propuesta. Las tablas muestran los resultados obtenidos en cada una
de las funciones de cada benchmark utilizado, también se muestran los
resultados de aplicar las pruebas de Friedman a los resultados obteni-
dos cuando los dos padres son factibles, cuando los dos padres son no
factibles y cuando sólo uno de los padres es factible.
A.1. Complemento de los Resultados obtenidos conBLX-α
Cada tabla muestra alguno de los casos en particular ya sea dados dospadres factibles, dos padres no factibles o sólo un padres factible que porcen-taje de descendientes factibles generan, asi, en cada tabla la primera columnamuestra el nombre de cada función; la segunda columna muestra el porcen-taje de soluciones no factibles obtenidos en la función; la tercera columnamuestra el porcentaje de soluciones obtenidos cuando solo un descendientees factible, la cuarta columna muestra el porcentaje de descendientes obteni-dos cuando estos dos son factibles, la quinta columna muestra la factibilidadlocal obtenida en la función, la cual consiste en sumar la columna 1F y 2F,la última columna muestra el parámetro del operador con el cual se obtuvoel porcentaje de factibilidad mostrado en la tabla.
69
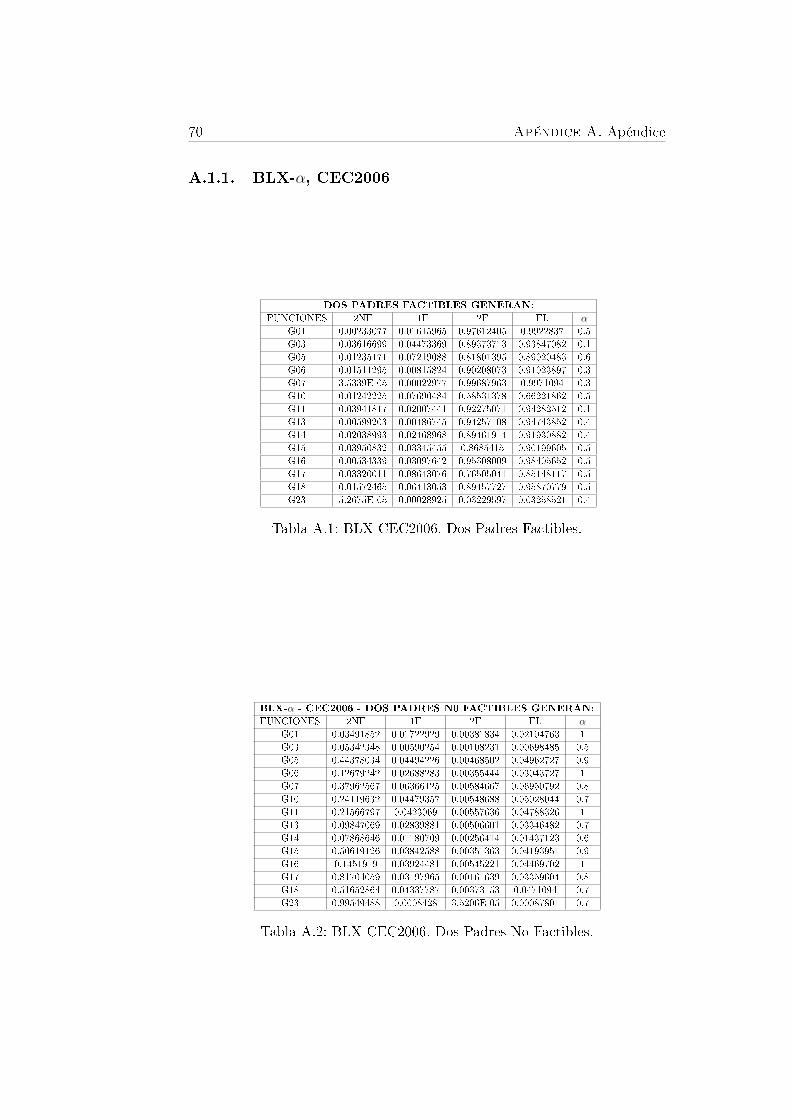
70 Apéndice A. Apéndice
A.1.1. BLX-α, CEC2006
DOS PADRES FACTIBLES GENERAN:FUNCIONES 2NF 1F 2F FL α
G01 0.00233077 0.01615965 0.97612405 0.9922837 0.5G03 0.03616699 0.04473369 0.89373713 0.93847082 0.1G05 0.01235171 0.07219088 0.81801395 0.89020483 0.6G06 0.01511295 0.00815824 0.90208073 0.91023897 0.3G07 3.5339E-05 0.00022977 0.99687963 0.9971094 0.3G10 0.01242225 0.07690484 0.58531378 0.66221862 0.5G11 0.03941817 0.02007441 0.92275071 0.94282512 0.1G13 0.00599203 0.00486745 0.94257108 0.94743852 0.4G14 0.02038993 0.02468968 0.89461914 0.91930882 0.4G15 0.03950832 0.03345455 0.8685415 0.90199605 0.5G16 0.00534339 0.03097642 0.95308009 0.98405652 0.5G17 0.03320011 0.08643076 0.76505041 0.85148117 0.5G18 0.01572465 0.06413053 0.89457727 0.95870779 0.5G23 5.2675E-05 0.00028925 0.03229597 0.03258521 0.4
Tabla A.1: BLX CEC2006. Dos Padres Factibles.
BLX-α - CEC2006 - DOS PADRES N0 FACTIBLES GENERAN:FUNCIONES 2NF 1F 2F FL α
G01 0.03491852 0.01722929 0.00381834 0.02104763 1G03 0.05342348 0.00590254 0.00108231 0.00698485 0.5G05 0.44378034 0.04494226 0.00468502 0.04962727 0.9G06 0.12679242 0.02688283 0.00355444 0.03043727 1G07 0.37962567 0.06366125 0.00584667 0.06950792 0.8G10 0.24119632 0.04479357 0.00548688 0.05028044 0.7G11 0.21566797 0.0423069 0.00557636 0.04788326 1G13 0.09847069 0.02839881 0.00506601 0.03346482 0.7G14 0.07868646 0.01180709 0.00256414 0.01437123 0.6G15 0.50619126 0.03842588 0.00351363 0.04193951 0.9G16 0.1451919 0.03924481 0.00545221 0.04469702 1G17 0.81704059 0.03197965 0.00161639 0.03359604 0.8G18 0.51652864 0.04337787 0.00373153 0.0471094 0.7G23 0.99549488 0.0008428 3.5206E-05 0.00087801 0.7
Tabla A.2: BLX CEC2006. Dos Padres No Factibles.
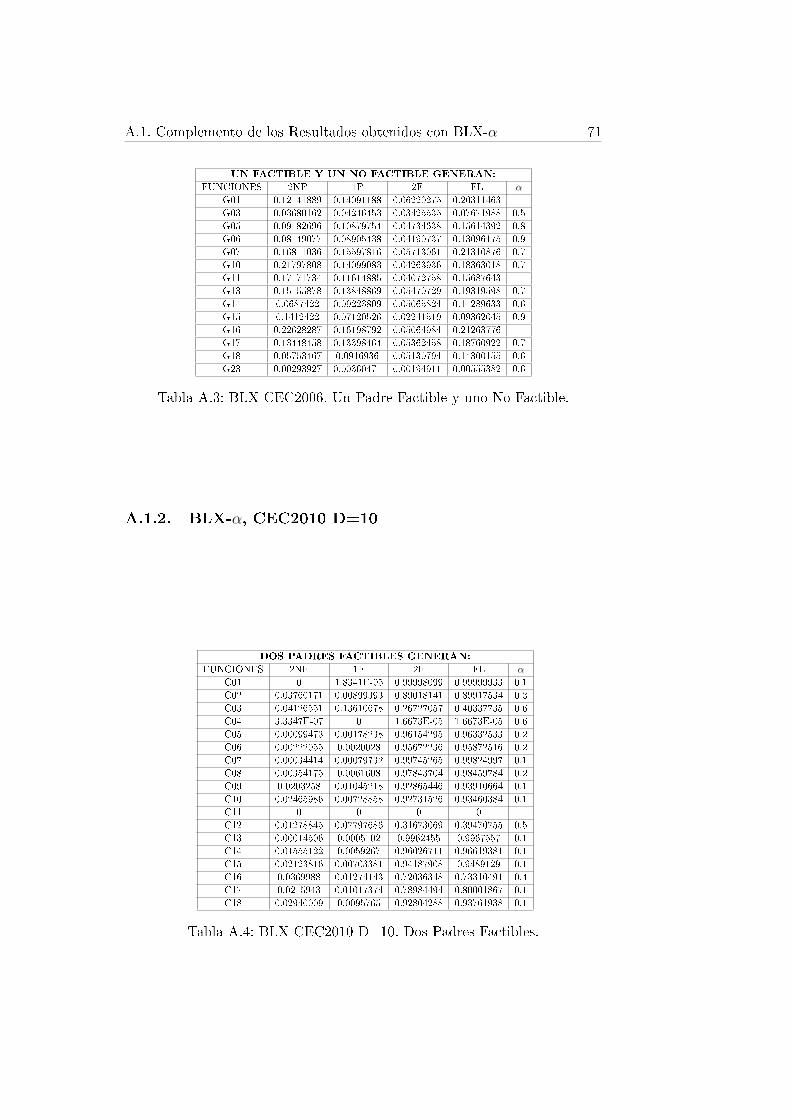
A.1. Complemento de los Resultados obtenidos con BLX-α 71
UN FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIONES 2NF 1F 2F FL α
G01 0.12141889 0.14091188 0.06220275 0.20311463 1G03 0.03680162 0.04246453 0.03425535 0.07671988 0.5G05 0.09182696 0.10879754 0.04734638 0.15614392 0.8G06 0.08149077 0.08905438 0.04190737 0.13096175 0.9G07 0.16811036 0.15597816 0.05713061 0.21310876 0.7G10 0.21797808 0.14099083 0.04263936 0.18363018 0.7G11 0.17171734 0.11614885 0.04072758 0.15687643 1G13 0.15155878 0.13848869 0.05470729 0.19319598 0.7G14 0.0687422 0.09223809 0.05065824 0.14289633 0.6G15 0.1412422 0.07120526 0.02241519 0.09362045 0.9G16 0.22628287 0.16198792 0.05064984 0.21263776 1G17 0.13448458 0.13398464 0.05362458 0.18760922 0.7G18 0.05753467 0.0916936 0.05130794 0.14300155 0.6G23 0.00293927 0.00360471 0.00194911 0.00555382 0.6
Tabla A.3: BLX CEC2006. Un Padre Factible y uno No Factible.
A.1.2. BLX-α, CEC2010 D=10
DOS PADRES FACTIBLES GENERAN:FUNCIONES 2NF 1F 2F FL α
C01 0 1.8341E-05 0.99998099 0.99999933 0.1C02 0.03760171 0.00899393 0.89018141 0.89917534 0.3C03 0.04126551 0.13610678 0.26727057 0.40337735 0.6C04 3.3347E-07 0 1.6673E-05 1.6673E-05 0.6C05 0.00099473 0.00178238 0.96154295 0.96332533 0.2C06 0.00222055 0.0020028 0.95672236 0.95872516 0.2C07 0.00034414 0.00079732 0.99745265 0.99824997 0.1C08 0.00354175 0.0061608 0.97843704 0.98459784 0.2C09 0.0203258 0.01045218 0.92865446 0.93910664 0.1C10 0.02465986 0.00728858 0.92731526 0.93460384 0.1C11 0 0 0 0 -C12 0.01278845 0.07797686 0.31673069 0.39470755 0.5C13 0.00014506 0.0005102 0.9962455 0.9967557 0.1C14 0.01555122 0.0059267 0.96026711 0.96619381 0.1C15 0.02123816 0.00703381 0.94187908 0.9489129 0.1C16 0.0369988 0.01274143 0.72036348 0.73310491 0.4C17 0.0215943 0.01017374 0.78984494 0.80001867 0.1C18 0.02940009 0.0095765 0.92804288 0.93761938 0.1
Tabla A.4: BLX CEC2010 D=10. Dos Padres Factibles.

72 Apéndice A. Apéndice
DOS PADRES NO FACTIBLES GENERAN:FUNCIONES 2NF 1F 2F FL α
C01 0.00152128 0.00128985 0.00040883 0.00169868 0.7C02 0.48177104 0.01050854 0.00127951 0.01178805 0.5C03 0.54844338 0.03612478 0.00311658 0.03924136 0.7C04 0.99854575 5.769E-05 0 5.769E-05 0.6C05 0.15936608 0.00284014 0.00045585 0.00329599 0.5C06 0.95221489 0.01141823 0.00026144 0.01167967 0.6C07 0.04835034 0.04708083 0.01489696 0.06197779 1C08 0.05927671 0.06754835 0.02052121 0.08806956 0.6C09 0.4629205 0.01004302 0.00136021 0.01140323 0.5C10 0.38076797 0.01177938 0.00179405 0.01357343 0.5C11 1 0 0 0 -C12 0.61908864 0.01834434 0.00155562 0.01989996 0.7C13 0.23697679 0.05446412 0.00640189 0.06086601 0.7C14 0.33912765 0.01389322 0.00085768 0.0147509 0.6C15 0.69150193 0.00585468 0.00055122 0.0064059 0.5C16 0.18829665 0.01039149 0.00158597 0.01197746 0.5C17 0.42299687 0.00745698 0.00148026 0.00893724 0.5C18 0.25935274 0.01243564 0.00218988 0.01462552 0.5
Tabla A.5: BLX CEC2010 D=10. Dos Padres No Factibles.
UN FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIONES 2NF 1F 2F FL α
C01 0.01770975 0.04120915 0.03380352 0.07501267 0.7C02 0.03411431 0.02185307 0.01493831 0.03679138 0.5C03 0.16077664 0.08714552 0.02135321 0.10849873 0.7C04 0.00137088 8.6701E-06 0 8.6701E-06 0.6C05 0.01368747 0.01418667 0.0119231 0.02610978 0.5C06 0.0136768 0.01500834 0.01194578 0.02695411 0.5C07 0.15744198 0.19683373 0.07539883 0.27223256 1C08 0.17821562 0.21722923 0.06622049 0.28344971 0.8C09 0.03542984 0.02711551 0.01941877 0.04653428 0.5C10 0.04205716 0.03427304 0.02380519 0.05807823 0.5C11 0 0 0 0 -C12 0.09576997 0.05870115 0.01804922 0.07675037 0.7C13 0.22756136 0.13653728 0.03645792 0.1729952 0.7C14 0.03996732 0.01044818 0.0025767 0.01302488 0.6C15 0.03893057 0.01254802 0.00931739 0.02186541 0.5C16 0.04326164 0.03831499 0.02939776 0.06771275 0.5C17 0.03248066 0.03279679 0.02404962 0.05684641 0.5C18 0.0487555 0.04405996 0.03254068 0.07660064 0.5
Tabla A.6: BLX CEC2010 D=10. Un padre Factible y uno no Factible.
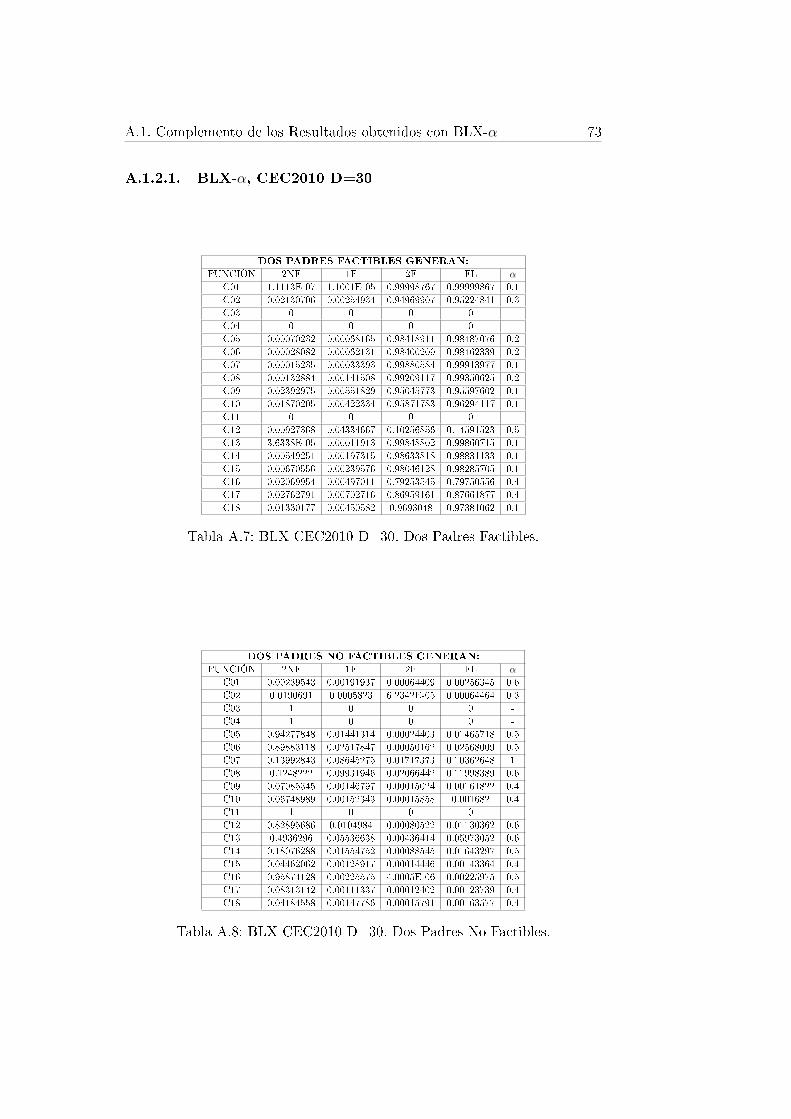
A.1. Complemento de los Resultados obtenidos con BLX-α 73
A.1.2.1. BLX-α, CEC2010 D=30
DOS PADRES FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL α
C01 1.1113E-07 1.1001E-05 0.99998767 0.99999867 0.1C02 0.02130706 0.00254934 0.94969907 0.95224841 0.3C03 0 0 0 0 -C04 0 0 0 0 -C05 0.00070232 0.00068165 0.98418911 0.98487076 0.2C06 0.00028082 0.00062131 0.98400209 0.98462339 0.2C07 0.00015235 0.00033393 0.99880584 0.99913977 0.1C08 0.00132884 0.00141508 0.99209117 0.99350625 0.2C09 0.02392975 0.00551829 0.95045773 0.95597602 0.1C10 0.01870205 0.00422334 0.95871783 0.96294117 0.1C11 0 0 0 0 -C12 0.00927368 0.04334667 0.10256856 0.14591523 0.5C13 3.6338E-05 0.00011913 0.99848802 0.99860715 0.1C14 0.00549251 0.00197315 0.98633818 0.98831133 0.1C15 0.00670556 0.00239576 0.98046128 0.98285705 0.1C16 0.02069954 0.00497011 0.79253545 0.79750556 0.4C17 0.02762791 0.00702716 0.86959161 0.87661877 0.4C18 0.01330177 0.00450582 0.9693048 0.97381062 0.1
Tabla A.7: BLX CEC2010 D=30. Dos Padres Factibles.
DOS PADRES NO FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL α
C01 0.00239543 0.00191937 0.00064409 0.00256345 0.6C02 0.0190691 0.0005823 6.2342E-05 0.00064464 0.3C03 1 0 0 0 -C04 1 0 0 0 -C05 0.94277848 0.01441314 0.00024403 0.01465718 0.5C06 0.89883118 0.02517847 0.00050162 0.02568009 0.5C07 0.13992843 0.08645275 0.01717373 0.10362648 1C08 0.1248222 0.09931946 0.02066442 0.11998389 0.6C09 0.07085345 0.00146797 0.00015024 0.00161822 0.4C10 0.06748989 0.00152343 0.00015858 0.001682 0.4C11 1 0 0 0 -C12 0.82895686 0.0104984 0.00080522 0.01130362 0.6C13 0.4936296 0.05536638 0.00436414 0.05973052 0.6C14 0.18076288 0.01554752 0.00088545 0.01643297 0.5C15 0.04462062 0.00128917 0.00014446 0.00143364 0.4C16 0.95874128 0.00225575 4.0005E-06 0.00225975 0.5C17 0.08313142 0.00111337 0.00012402 0.00123739 0.4C18 0.04184558 0.00147786 0.00015791 0.00163577 0.4
Tabla A.8: BLX CEC2010 D=30. Dos Padres No Factibles.
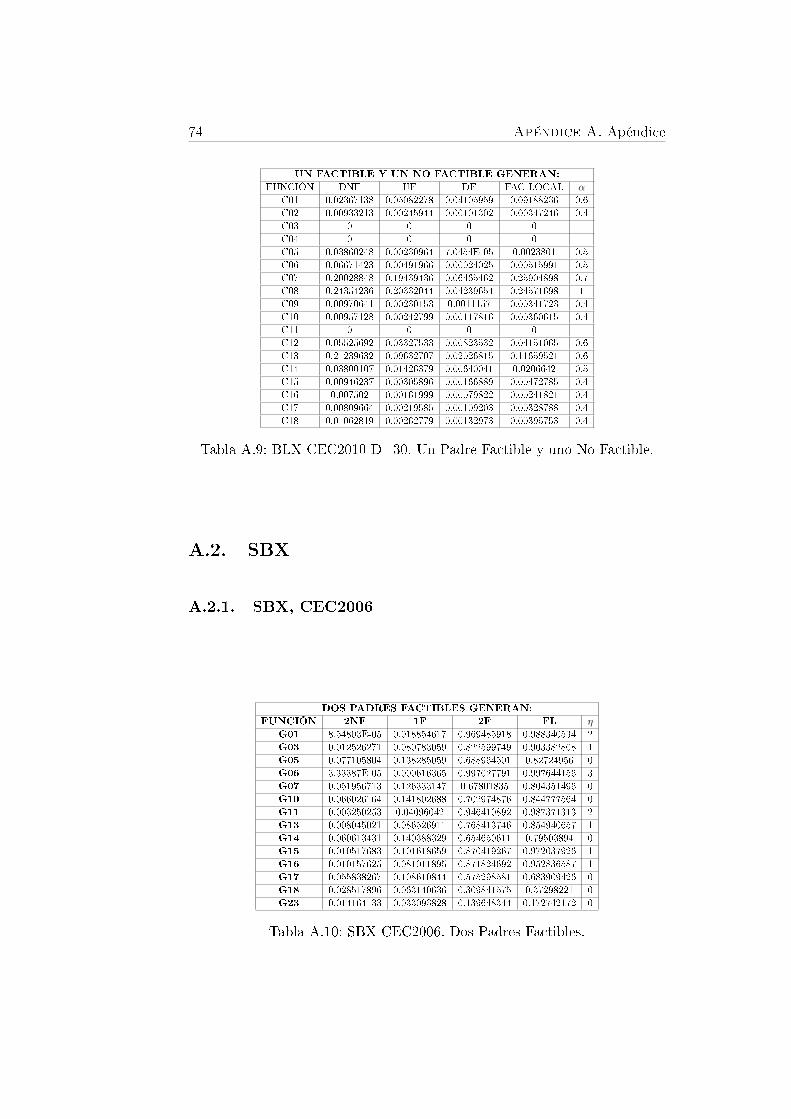
74 Apéndice A. Apéndice
UN FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIÓN DNF UF DF FAC LOCAL α
C01 0.02367138 0.05082278 0.04105959 0.09188236 0.6C02 0.00933213 0.00245944 0.00101302 0.00347246 0.4C03 0 0 0 0 -C04 0 0 0 0 -C05 0.03860248 0.00230964 7.0454E-05 0.0023801 0.5C06 0.06671423 0.00491966 0.00024025 0.00515991 0.5C07 0.20028848 0.19439436 0.06465462 0.25904898 0.7C08 0.24354236 0.20332044 0.04239654 0.24571698 1C09 0.00970641 0.00230153 0.0011157 0.00341723 0.4C10 0.00957128 0.00242799 0.00117816 0.00360615 0.4C11 0 0 0 0 -C12 0.05525692 0.03327533 0.00823532 0.04151065 0.6C13 0.21239632 0.09632707 0.02026815 0.11659521 0.6C14 0.03800107 0.01426379 0.00640041 0.0206642 0.5C15 0.00946237 0.00305896 0.00166889 0.00472785 0.4C16 0.007502 0.00161999 0.00079822 0.00241821 0.4C17 0.00809664 0.00219585 0.00109203 0.00328788 0.4C18 0.01062819 0.00262779 0.00132973 0.00395753 0.4
Tabla A.9: BLX CEC2010 D=30. Un Padre Factible y uno No Factible.
A.2. SBX
A.2.1. SBX, CEC2006
DOS PADRES FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL η
G01 8.54803E-05 0.018854617 0.969485918 0.988340534 2G03 0.012526271 0.080783059 0.822599749 0.903382808 1G05 0.077105804 0.138285059 0.688964501 0.82724956 0G06 3.33387E-05 0.000616365 0.997027791 0.997644156 3G07 0.051956713 0.126333147 0.67801835 0.804351496 0G10 0.066026164 0.141802688 0.702974876 0.844777564 0G11 0.003250253 0.04096042 0.946410892 0.987371313 2G13 0.008045021 0.086526911 0.768413746 0.854940657 1G14 0.060613431 0.140388329 0.654650611 0.79503894 0G15 0.010517683 0.101618659 0.870419267 0.972037926 1G16 0.010157625 0.081011895 0.871824692 0.952836587 1G17 0.055838267 0.108610844 0.575298581 0.683909426 0G18 0.028517896 0.063140636 0.309841575 0.37298221 0G23 0.014164133 0.033093828 0.139648344 0.172742172 0
Tabla A.10: SBX CEC2006. Dos Padres Factibles.

A.2. SBX 75
DOS PADRES NO FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL η
G01 0.007243692 9.97493E-05 2.20035E-05 0.000121753 0G03 0.009984398 0.000986558 0.000276844 0.001263402 0G05 0.01887342 0.000576226 0.0002107 0.000786926 0G06 0.023723529 0.010602363 0.003008748 0.013611111 0G07 0.096291673 0.000226836 7.56121E-05 0.000302448 0G10 0.024179735 0.000338321 9.54819E-05 0.000433803 0G11 0.007830586 0.001046567 0.00026791 0.001314477 0G13 0.013295461 0.000325252 0.000136822 0.000462074 0G14 0.081795621 0.000362191 0.000113618 0.000475809 0G15 0.011183656 0.000697045 0.000258708 0.000955753 0G16 0.007429455 0.000223502 6.44103E-05 0.000287913 0G17 0.210572625 0.00025284 9.49485E-05 0.000347789 0G18 0.570255774 0.000180296 4.90745E-05 0.00022937 0G23 0.792401851 0.000471142 0.00010215 0.000573292 0
Tabla A.11: SBX CEC2006. Dos Padres No Factibles.
UN PADRE FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIÓN 2NF 1F 2F FL η
G01 0.00371313 0.00833267 0.00293394 0.0112666 0G03 0.01924188 0.03367259 0.01266296 0.04633555 0G05 0.0226899 0.03906838 0.01422601 0.05329439 0G06 0.08749307 0.1308612 0.04858177 0.17944298 0G07 0.01232331 0.02592561 0.00884875 0.03477436 0G10 0.02040847 0.03328466 0.01088961 0.04417427 0G11 0.00797581 0.03910026 0.01823959 0.05733984 1G12 0.00111885 0.00299075 0.00095602 0.00394676 1G13 0.01860524 0.0343591 0.01248253 0.04684163 0G14 0.01759361 0.0335563 0.01092628 0.04448258 0G15 0.02711354 0.04075865 0.01466021 0.05541887 0G16 0.01205833 0.01967795 0.00664773 0.02632568 0G17 0.01367605 0.02609444 0.0095614 0.03565584 0G18 0.00788526 0.01485398 0.00527551 0.02012949 0G23 0.00685656 0.00985864 0.00340334 0.01326199 0
Tabla A.12: SBX CEC2006. Un Padre Factible y uno No Factible.
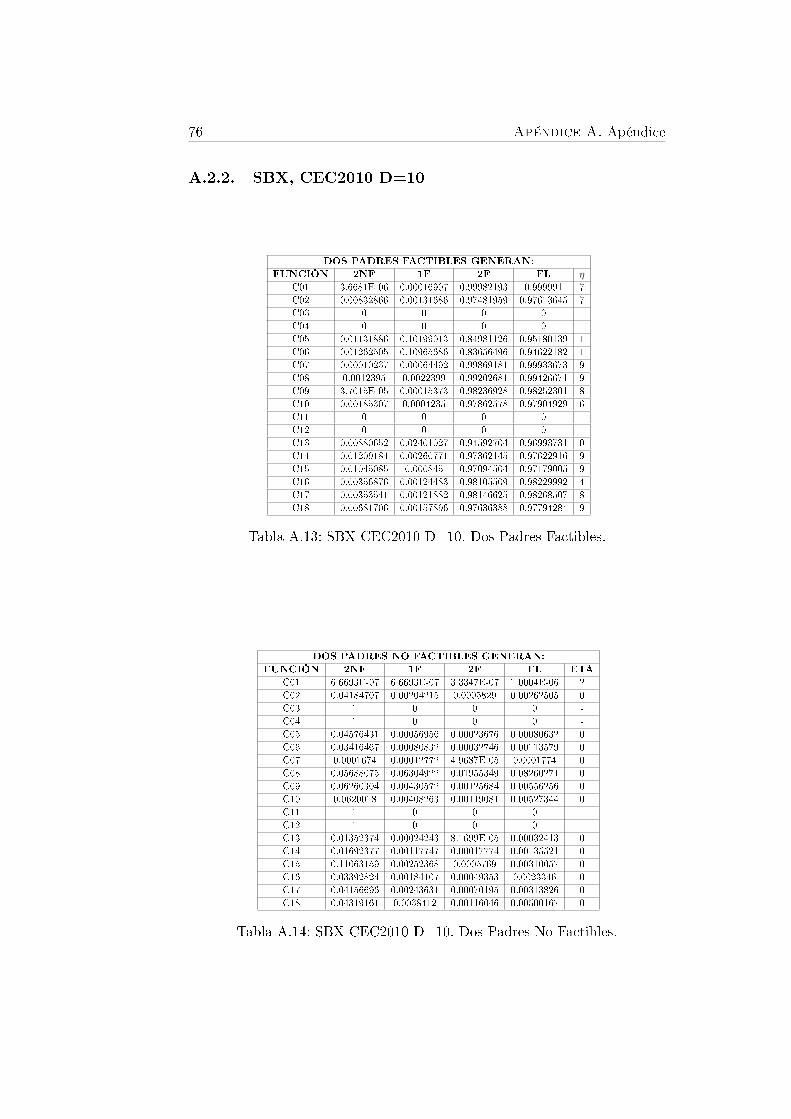
76 Apéndice A. Apéndice
A.2.2. SBX, CEC2010 D=10
DOS PADRES FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL η
C01 3.6681E-06 0.00016907 0.99982193 0.999991 7C02 0.00832866 0.00131686 0.97481959 0.97613645 7C03 0 0 0 0 -C04 0 0 0 0 -C05 0.01131886 0.10199013 0.84981126 0.95180139 1C06 0.01262505 0.10965686 0.83656496 0.94622182 1C07 0.00010237 0.00064492 0.99869181 0.99933673 9C08 0.0012395 0.0022399 0.99202681 0.99426671 9C09 3.7015E-05 0.00015373 0.98236928 0.98252301 8C10 0.00185307 0.0004235 0.97862578 0.97904929 6C11 0 0 0 0 -C12 0 0 0 0 -C13 0.00880652 0.02401027 0.94592704 0.96993731 0C14 0.01209184 0.00260771 0.97362145 0.97622916 9C15 0.01045085 0.000845 0.97094504 0.97179005 9C16 0.00356876 0.00124483 0.98105509 0.98229992 4C17 0.00353541 0.00121882 0.98146625 0.98268507 8C18 0.00681706 0.00157896 0.97636388 0.97794284 9
Tabla A.13: SBX CEC2010 D=10. Dos Padres Factibles.
DOS PADRES NO FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL ETA
C01 6.6693E-07 6.6693E-07 3.3347E-07 1.0004E-06 2C02 0.04184707 0.00204215 0.0005829 0.00262505 0C03 1 0 0 0 -C04 1 0 0 0 -C05 0.04576431 0.00056956 0.00023676 0.00080632 0C06 0.03416467 0.00080832 0.00032746 0.00113579 0C07 0.0001674 0.00012772 4.9687E-05 0.0001774 0C08 0.05688075 0.06304922 0.01955349 0.08260271 0C09 0.06260304 0.00430572 0.00125684 0.00556256 0C10 0.0620018 0.00408263 0.00119081 0.00527344 0C11 1 0 0 0 -C12 1 0 0 0 -C13 0.01352374 0.00024243 8.1699E-05 0.00032413 0C14 0.01692377 0.00117747 0.00017774 0.00135521 0C15 0.11063159 0.00252368 0.0005769 0.00310057 0C16 0.03392824 0.00184107 0.00049353 0.0023346 0C17 0.04156696 0.00243631 0.00070195 0.00313826 0C18 0.04319161 0.0038412 0.00116046 0.00500167 0
Tabla A.14: SBX CEC2010 D=10. Dos Padres No Factibles.

A.2. SBX 77
UN PADRE FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIÓN 2NF 1F 2F FL ETA
C01 1.4339E-05 0.00016407 5.7356E-05 0.00022142 1C02 0.03698646 0.04791016 0.01727691 0.06518707 0C03 0 0 0 0 -C04 0 0 0 0 -C05 0.02170035 0.03728925 0.01422202 0.05151127 0C06 0.02733727 0.04169835 0.01557123 0.05726957 0C07 0.00038615 0.00137155 0.00052154 0.00189309 1C08 0.17060658 0.21226291 0.06470455 0.27696745 0C09 0.07198579 0.0704135 0.02329732 0.09371082 0C10 0.07055822 0.06966953 0.02308457 0.0927541 0C11 0 0 0 0 -C12 0 0 0 0 -C13 0.0019241 0.00408363 0.00140056 0.00548419 0C14 0.0111638 0.01716687 0.0059904 0.02315726 0C15 0.0425 0.04741997 0.01662565 0.06404562 0C16 0.03457316 0.04174436 0.01417934 0.0559237 0C17 0.04448079 0.05216853 0.01796852 0.07013705 0C18 0.06495331 0.06627151 0.02214052 0.08841203 0
Tabla A.15: SBX CEC2010 D=10. Un Padre Factible y uno No Factible.
A.2.2.1. SBX, CEC2010 D=30
DOS PADRES FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL η
C01 7.5566E-06 0.00036694 0.99962262 0.99998955 0C02 0.00763013 0.01393419 0.97112237 0.98505656 5C03 0 0 0 0 -C04 0 0 0 0 -C05 0.01071376 0.10354914 0.86629151 0.96984065 1C06 0.00323765 0.05017313 0.9301818 0.98035494 2C07 5.0451E-05 0.00021947 0.9994057 0.99962517 9C08 0.00048929 0.00076321 0.99660599 0.9973692 9C09 0.00033527 0.00082544 0.99209672 0.99292217 6C10 0.00356903 0.00108237 0.98823388 0.98931624 8C11 0 0 0 0 -C12 0 0 0 0 -C13 0.02098469 0.04443837 0.88153309 0.92597146 0C14 0.00457228 0.01596791 0.97218274 0.98815064 2C15 0.01056519 0.00184914 0.97957094 0.98142008 7C16 0.0136796 0.09325688 0.87270625 0.96596313 1C17 0.00343057 0.00019203 0.99131784 0.99150987 6C18 0.0087555 0.0006302 0.98442092 0.98505112 6
Tabla A.16: SBX CEC2010 D=30. Dos Padres Factibles.
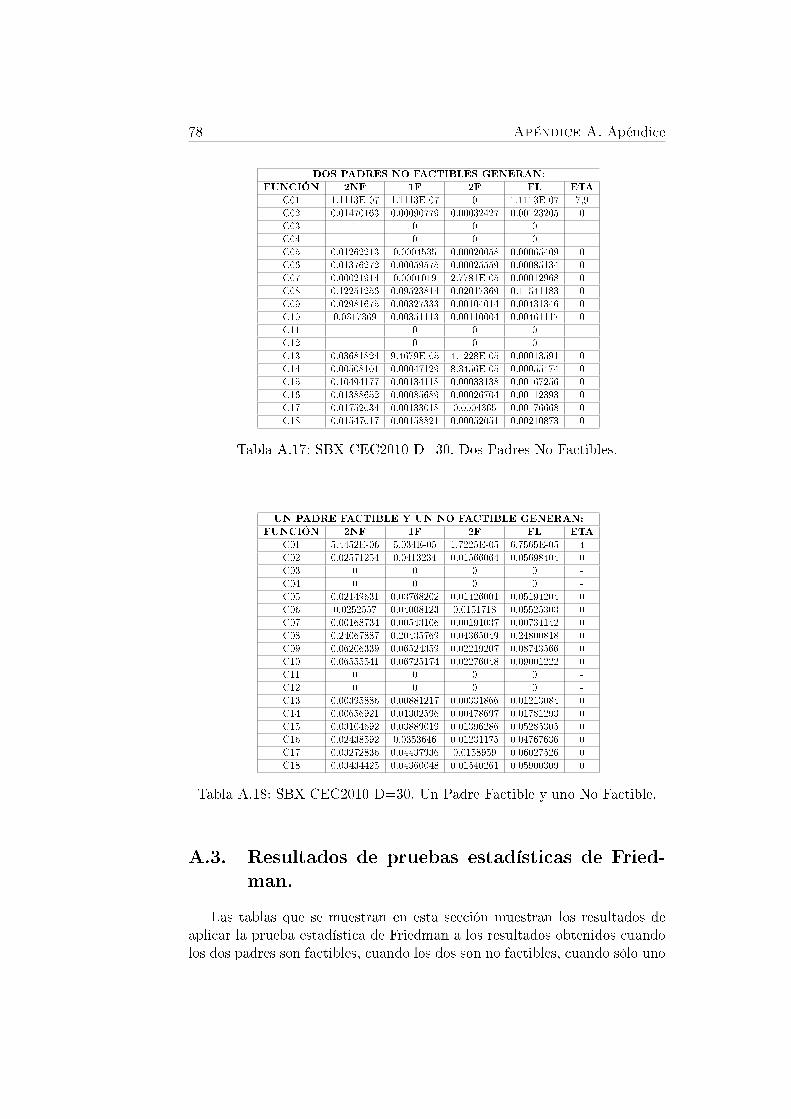
78 Apéndice A. Apéndice
DOS PADRES NO FACTIBLES GENERAN:FUNCIÓN 2NF 1F 2F FL ETA
C01 1.1113E-07 1.1113E-07 0 1.1113E-07 7,9C02 0.01470163 0.00090779 0.00032427 0.00123205 0C03 1 0 0 0 -C04 1 0 0 0 -C05 0.01262213 0.0004535 0.00020058 0.00065409 0C06 0.01376272 0.00059575 0.00025559 0.00085134 0C07 0.00021914 0.0001019 2.7781E-05 0.00012968 0C08 0.12251256 0.09523814 0.02017369 0.11541183 0C09 0.02981675 0.00327333 0.00104014 0.00431346 0C10 0.0317369 0.00351113 0.00110004 0.00461117 0C11 1 0 0 0 -C12 1 0 0 0 -C13 0.03681824 9.4679E-05 4.1228E-05 0.00013591 0C14 0.00508101 0.00047129 8.3456E-05 0.00055474 0C15 0.10494177 0.00134118 0.00033138 0.00167256 0C16 0.01388652 0.00085689 0.00026704 0.00112393 0C17 0.01752034 0.00133018 0.0004365 0.00176668 0C18 0.01547017 0.00158821 0.00052051 0.00210873 0
Tabla A.17: SBX CEC2010 D=30. Dos Padres No Factibles.
UN PADRE FACTIBLE Y UN NO FACTIBLE GENERAN:FUNCIÓN 2NF 1F 2F FL ETA
C01 5.4452E-06 5.034E-05 1.7225E-05 6.7565E-05 4C02 0.02571254 0.0413234 0.01566064 0.05698404 0C03 0 0 0 0 -C04 0 0 0 0 -C05 0.02149631 0.03768202 0.01426001 0.05194204 0C06 0.0252557 0.04008123 0.0151718 0.05525303 0C07 0.00168734 0.00543106 0.00191037 0.00734142 0C08 0.24067887 0.20435769 0.04365049 0.24800818 0C09 0.06206339 0.06524359 0.02219207 0.08743566 0C10 0.06555541 0.06725174 0.02276048 0.09001222 0C11 0 0 0 0 -C12 0 0 0 0 -C13 0.00395886 0.00881217 0.00331866 0.01213084 0C14 0.00656921 0.01302596 0.00478697 0.01781293 0C15 0.03104692 0.03889019 0.01396286 0.05285305 0C16 0.02438592 0.0353646 0.01231175 0.04767636 0C17 0.03272836 0.04437936 0.0158959 0.06027526 0C18 0.03434425 0.04360048 0.01540261 0.05900309 0
Tabla A.18: SBX CEC2010 D=30. Un Padre Factible y uno No Factible.
A.3. Resultados de pruebas estadísticas de Fried-man.
Las tablas que se muestran en esta sección muestran los resultados deaplicar la prueba estadística de Friedman a los resultados obtenidos cuandolos dos padres son factibles, cuando los dos son no factibles, cuando sólo uno
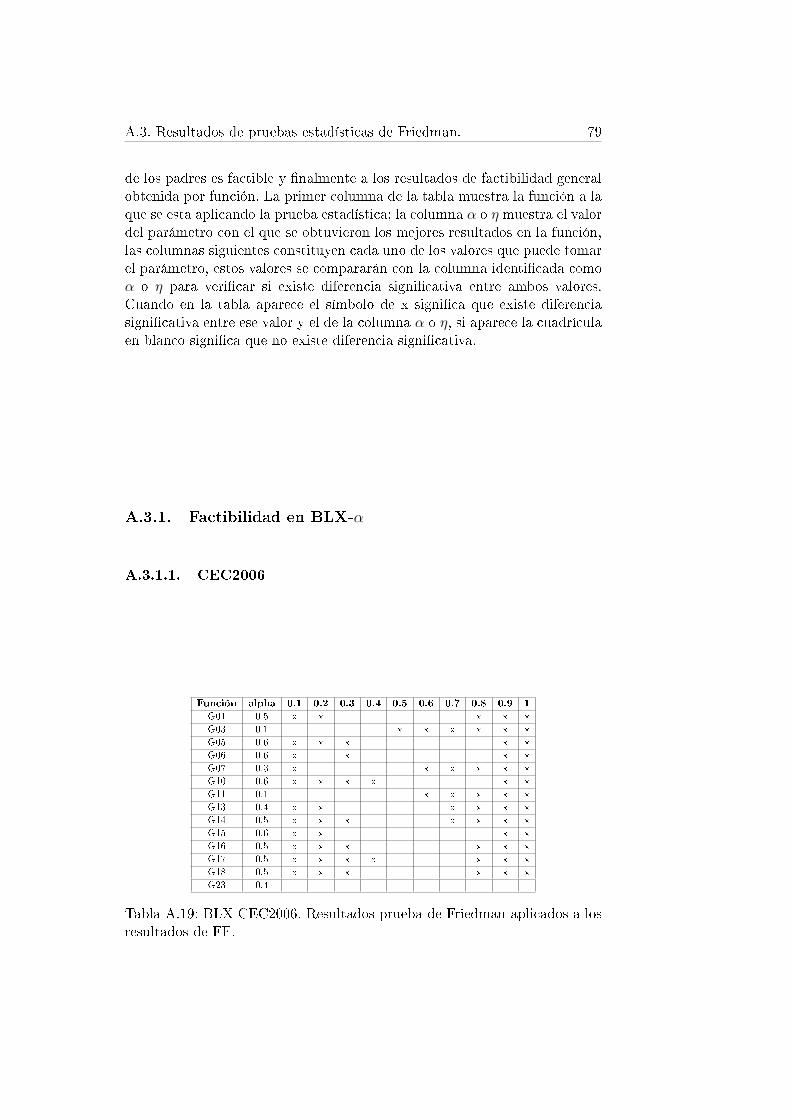
A.3. Resultados de pruebas estadísticas de Friedman. 79
de los padres es factible y �nalmente a los resultados de factibilidad generalobtenida por función. La primer columna de la tabla muestra la función a laque se esta aplicando la prueba estadística; la columna α o η muestra el valordel parámetro con el que se obtuvieron los mejores resultados en la función,las columnas siguientes constituyen cada uno de los valores que puede tomarel parámetro, estos valores se compararán con la columna identi�cada comoα o η para veri�car si existe diferencia signi�cativa entre ambos valores.Cuando en la tabla aparece el símbolo de x signi�ca que existe diferenciasigni�cativa entre ese valor y el de la columna α o η, si aparece la cuadrículaen blanco signi�ca que no existe diferencia signi�cativa.
A.3.1. Factibilidad en BLX-α
A.3.1.1. CEC2006
Función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1G01 0.5 x x x x xG03 0.1 x x x x x xG05 0.6 x x x x xG06 0.6 x x x xG07 0.3 x x x x x xG10 0.6 x x x x x xG11 0.1 x x x x xG13 0.4 x x x x x xG14 0.5 x x x x x x xG15 0.6 x x x xG16 0.5 x x x x x xG17 0.5 x x x x x x xG18 0.5 x x x x x xG23 0.4
Tabla A.19: BLX CEC2006. Resultados prueba de Friedman aplicados a losresultados de FF.
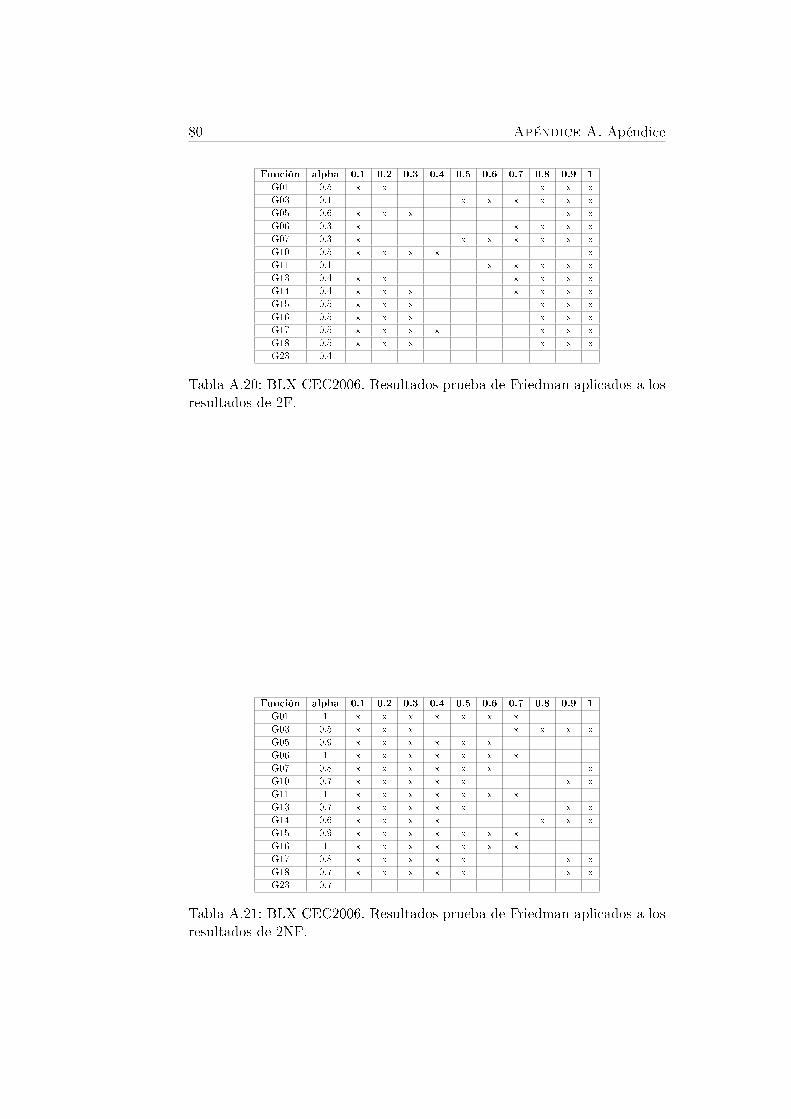
80 Apéndice A. Apéndice
Función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1G01 0.5 x x x x xG03 0.1 x x x x x xG05 0.6 x x x x xG06 0.3 x x x x xG07 0.3 x x x x x x xG10 0.5 x x x x xG11 0.1 x x x x xG13 0.4 x x x x x xG14 0.4 x x x x x x xG15 0.5 x x x x x xG16 0.5 x x x x x xG17 0.5 x x x x x x xG18 0.5 x x x x x xG23 0.4
Tabla A.20: BLX CEC2006. Resultados prueba de Friedman aplicados a losresultados de 2F.
Función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1G01 1 x x x x x x xG03 0.5 x x x x x x xG05 0.9 x x x x x xG06 1 x x x x x x xG07 0.8 x x x x x x xG10 0.7 x x x x x x xG11 1 x x x x x x xG13 0.7 x x x x x x xG14 0.6 x x x x x x xG15 0.9 x x x x x x xG16 1 x x x x x x xG17 0.8 x x x x x x xG18 0.7 x x x x x x xG23 0.7
Tabla A.21: BLX CEC2006. Resultados prueba de Friedman aplicados a losresultados de 2NF.
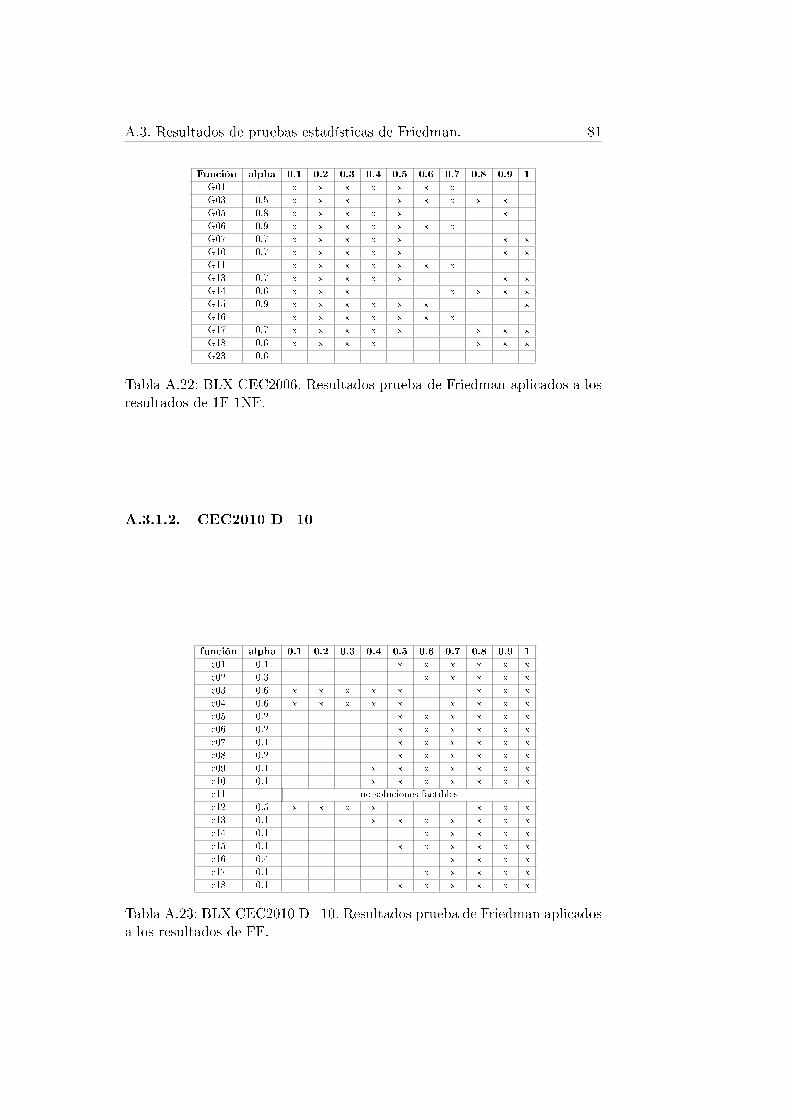
A.3. Resultados de pruebas estadísticas de Friedman. 81
Función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1G01 1 x x x x x x xG03 0.5 x x x x x x x xG05 0.8 x x x x x xG06 0.9 x x x x x x xG07 0.7 x x x x x x xG10 0.7 x x x x x x xG11 1 x x x x x x xG13 0.7 x x x x x x xG14 0.6 x x x x x x xG15 0.9 x x x x x x xG16 1 x x x x x x xG17 0.7 x x x x x x x xG18 0.6 x x x x x x xG23 0.6
Tabla A.22: BLX CEC2006. Resultados prueba de Friedman aplicados a losresultados de 1F-1NF.
A.3.1.2. CEC2010 D=10
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.1 x x x x x xc02 0.3 x x x x xc03 0.6 x x x x x x x xc04 0.6 x x x x x x x x xc05 0.2 x x x x x xc06 0.2 x x x x x xc07 0.1 x x x x x xc08 0.2 x x x x x xc09 0.1 x x x x x x xc10 0.1 x x x x x x xc11 - no soluciones factiblesc12 0.5 x x x x x x xc13 0.1 x x x x x x xc14 0.1 x x x x xc15 0.1 x x x x x xc16 0.4 x x x xc17 0.1 x x x x xc18 0.1 x x x x x x
Tabla A.23: BLX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de FF.
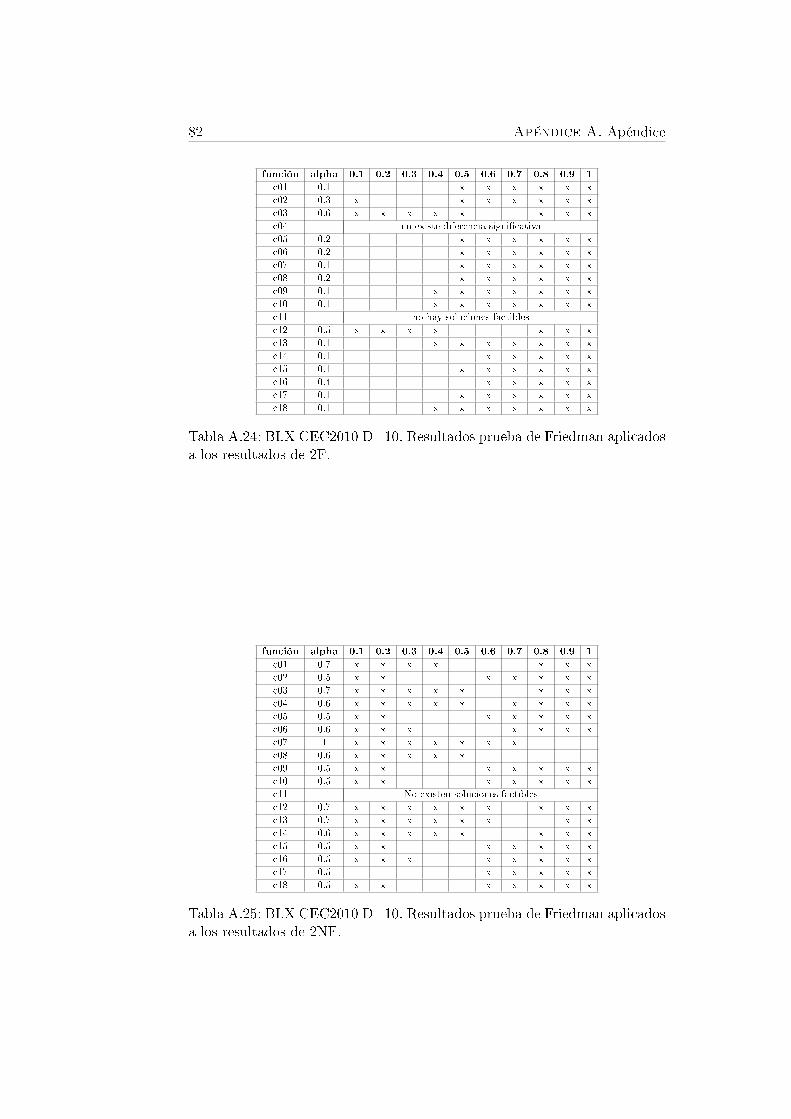
82 Apéndice A. Apéndice
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.1 x x x x x xc02 0.3 x x x x x x xc03 0.6 x x x x x x x xc04 no existe diferencia signi�cativac05 0.2 x x x x x xc06 0.2 x x x x x xc07 0.1 x x x x x xc08 0.2 x x x x x xc09 0.1 x x x x x x xc10 0.1 x x x x x x xc11 no hay soluciones factiblesc12 0.5 x x x x x x xc13 0.1 x x x x x x xc14 0.1 x x x x xc15 0.1 x x x x x xc16 0.4 x x x x xc17 0.1 x x x x x xc18 0.1 x x x x x x x
Tabla A.24: BLX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de 2F.
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.7 x x x x x x xc02 0.5 x x x x x x xc03 0.7 x x x x x x x xc04 0.6 x x x x x x x x xc05 0.5 x x x x x x xc06 0.6 x x x x x x xc07 1 x x x x x x xc08 0.6 x x x x xc09 0.5 x x x x x x xc10 0.5 x x x x x x xc11 No existen soluciones factiblesc12 0.7 x x x x x x x x xc13 0.7 x x x x x x x xc14 0.6 x x x x x x x xc15 0.5 x x x x x x xc16 0.5 x x x x x x x xc17 0.5 x x x x xc18 0.5 x x x x x x x
Tabla A.25: BLX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de 2NF.
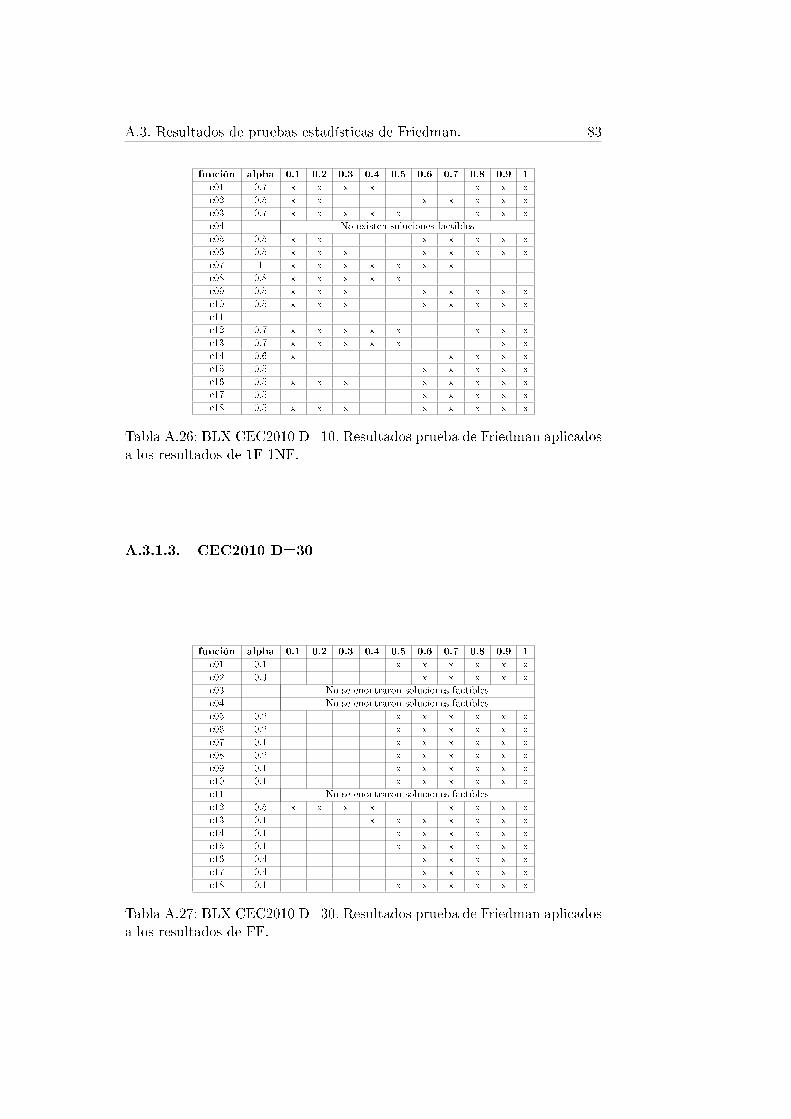
A.3. Resultados de pruebas estadísticas de Friedman. 83
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.7 x x x x x x xc02 0.5 x x x x x x xc03 0.7 x x x x x x x xc04 No existen soluciones factiblesc05 0.5 x x x x x x xc06 0.5 x x x x x x x xc07 1 x x x x x x xc08 0.8 x x x x xc09 0.5 x x x x x x x xc10 0.5 x x x x x x x xc11c12 0.7 x x x x x x x xc13 0.7 x x x x x x xc14 0.6 x x x x xc15 0.5 x x x x xc16 0.5 x x x x x x x xc17 0.5 x x x x xc18 0.5 x x x x x x x x
Tabla A.26: BLX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de 1F-1NF.
A.3.1.3. CEC2010 D=30
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.1 x x x x x xc02 0.3 x x x x xc03 No se enontraron soluciones factiblesc04 No se enontraron soluciones factiblesc05 0.2 x x x x x xc06 0.2 x x x x x xc07 0.1 x x x x x xc08 0.2 x x x x x xc09 0.1 x x x x x xc10 0.1 x x x x x xc11 No se enontraron soluciones factiblesc12 0.5 x x x x x x x xc13 0.1 x x x x x x xc14 0.1 x x x x x xc15 0.1 x x x x x xc16 0.4 x x x x xc17 0.4 x x x x xc18 0.1 x x x x x x
Tabla A.27: BLX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de FF.

84 Apéndice A. Apéndice
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.1 x x x x x xc02 0.3 x x x x x xc03c04c05 0.2 x x x x x xc06 0.2 x x x x x xc07 0.1 x x x x x xc08 0.2 x x x x x xc09 0.1 x x x x x xc10 0.1 x x x x x xc11c12 0.5 x x x x x x x xc13 0.1 x x x x x x xc14 0.1 x x x x x xc15 0.1 x x x x x xc16 0.4 x x x x xc17 0.4 x x x x x xc18 0.1 x x x x x x
Tabla A.28: BLX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de 2F.
c01 0.6 x x x x x x xc02 0.3 x x x x x x xc03c04c05 0.5 x x x x x xc06 0.5 x x x x xc07 1 x x x x x x x x x xc08 0.6 x x x x xc09 0.4 x x x x x x xc10 0.4 x x x x x x xc11 No se encuentran soluciones factiblesc12 0.6 x x x x x x x xc13 0.6 x x x x x x xc14 0.5 x x x x x x xc15 0.4 x x x x x x xc16 0.5 x x x x x x x xc17 0.4 x x x x x x xc18 0.4 x x x x x x x
Tabla A.29: BLX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de 2NF.

A.3. Resultados de pruebas estadísticas de Friedman. 85
función alpha 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1c01 0.6 x x x x x x xc02 0.4 x x x x x x xc03 No se encontraron soluciones factiblesc04 No se encontraron soluciones factiblesc05 0.5 x x x x x xc06 0.5 x x x x x x xc07 0.7 x x x x x xc08 1 x x x x x x x x x xc09 0.4 x x x x x xc10 0.4 x x x x x xc11 No se encontraron soluciones factiblesc12 0.6 x x x x x x x xc13 0.6 x x x x x x xc14 0.5 x x x x x x xc15 0.4 x x x x x xc16 0.4 x x x x xc17 0.4 x x x x x x x xc18 0.4 x x x x x
Tabla A.30: BLX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de 1F-1NF.
A.3.2. Factibilidad en SBX
A.3.2.1. CEC2006
FF 2Ffunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9
g01 1 x x x x x x x 2 x x x x x x xg03 1 x x 1 x xg05 0 x x x x x x x x 0 x x x x x x x xg06 3 x x x x x x x 3 x x x x x x xg07 0 x x x x x x x x x 0 x x x x x x x x xg10 0 x x x x x x x 0 x x x x x xg11 2 No hay diferencia 2 x xg13 0 x x x x x x x x 1 x x x x x x xg14 0 x x x x x x x x 0 x x x x x x x xg15 1 x x x x x x x x 1 x x x x xg16 1 x x x x x x 1 x x x x xg17 0 x x x x x x x x x 0 x x x x x x x x xg18 0 x x x x x x x x x 0 x x x x x x x x xg23 0 x x x x x x x x x 0 x x x x x x x x x
Tabla A.31: SBX CEC2006. Resultados prueba de Friedman aplicados a losresultados de FF y 2F.

86 Apéndice A. Apéndice
2NF 1F-1NFfunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9
g01 0 x x x x x x 0 x x x x x x xg03 0 x x x x x x x x 0 x x x x x x x xg05 0 x x x x x x x x 0 x x x x x x x xg06 0 x x x x x x x 0 x x x x x x xg07 0 x x x x x x x x x 0 x x x x x x x x xg10 0 x x x x x x x x 0 x x x x x x x xg11 0 x x x x x x x x 1 x x x x x x x xg13 0 x x x x x x x x 0 x x x x x x x xg14 0 x x x x x x x x 0 x x x x x x x xg15 0 x x x x x x x 0 x x x x x x xg16 0 x x x x x x x x 0 x x x x x x x xg17 0 x x x x x x x x x 0 x x x x x x x x xg18 0 x x x x x x x x x 0 x x x x x x x x xg23 0 x x x x x x x x x 0 x x x x x x x x x
Tabla A.32: SBX CEC2006. Resultados prueba de Friedman aplicados a losresultados de 2NF y 1F-1NF.
A.3.2.2. CEC2010 D=10
FF 2Ffunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9c01 7 x 7 NEDc02 7 x x x 7 x x xc03 NSF NSFc04 NSF NSFc05 1 x x x x x x 1 x x x x x xc06 1 x x x x x x x 1 x x x x x x xc07 9 x x x x x 9 x x x x xc08 9 x x x x x x 9 x x x x x xc09 8 x x x x x 8 x x x xc10 6 x x x x 6 x x x xc11 NSF NSFc12 NSF NSFc13 0 x x x x x x 0 x x x x xc14 9 x x x x x 9 x x x x xc15 9 x x x 9 x x x xc16 4 x x 4 x xc17 8 x x x 8 x x x xc18 9 x x x 9 x x x
Tabla A.33: SBX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de FF y 2F.
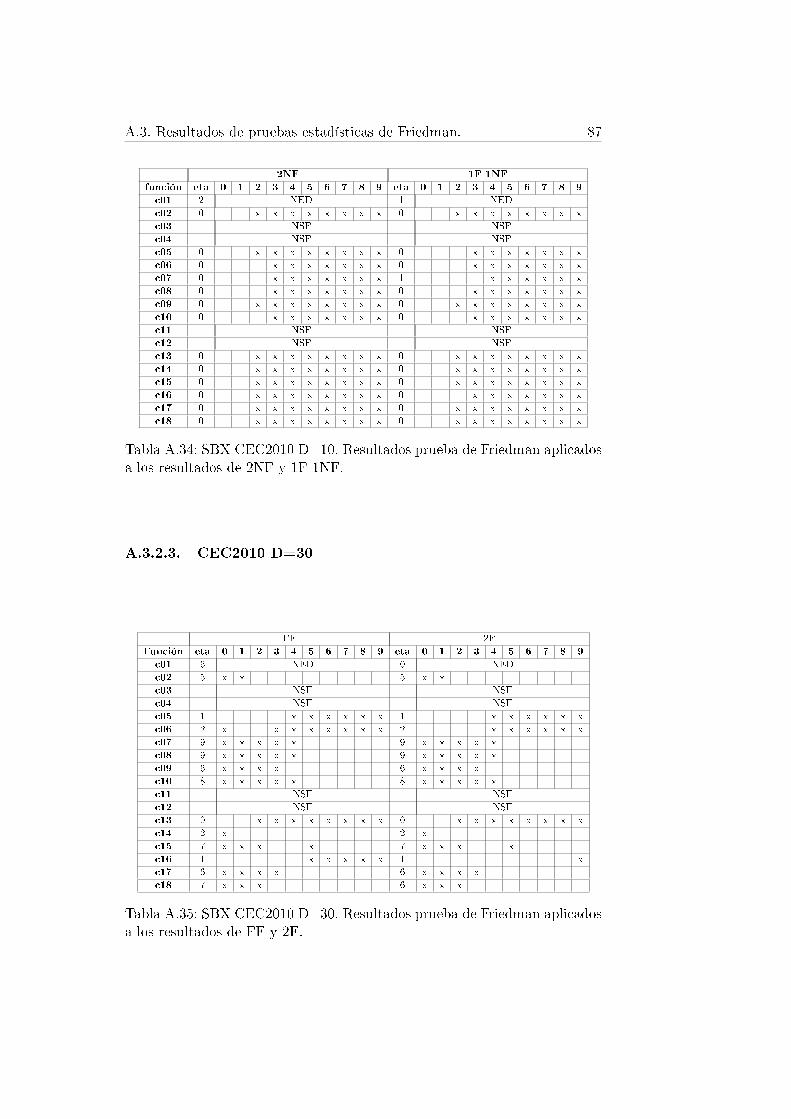
A.3. Resultados de pruebas estadísticas de Friedman. 87
2NF 1F-1NFfunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9c01 2 NED 1 NEDc02 0 x x x x x x x x 0 x x x x x x x xc03 NSF NSFc04 NSF NSFc05 0 x x x x x x x x 0 x x x x x x xc06 0 x x x x x x x 0 x x x x x x xc07 0 x x x x x x x 1 x x x x x xc08 0 x x x x x x x 0 x x x x x x xc09 0 x x x x x x x x 0 x x x x x x x xc10 0 x x x x x x x 0 x x x x x x xc11 NSF NSFc12 NSF NSFc13 0 x x x x x x x x 0 x x x x x x x xc14 0 x x x x x x x x 0 x x x x x x x xc15 0 x x x x x x x x 0 x x x x x x x xc16 0 x x x x x x x x 0 x x x x x x xc17 0 x x x x x x x x 0 x x x x x x x xc18 0 x x x x x x x x 0 x x x x x x x x
Tabla A.34: SBX CEC2010 D=10. Resultados prueba de Friedman aplicadosa los resultados de 2NF y 1F-1NF.
A.3.2.3. CEC2010 D=30
FF 2FFunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9c01 6 NED 0 NEDc02 5 x x 5 x xc03 NSF NSFc04 NSF NSFc05 1 x x x x x x 1 x x x x x xc06 2 x x x x x x x x 2 x x x x x xc07 9 x x x x x 9 x x x x xc08 9 x x x x x 9 x x x x xc09 6 x x x x 6 x x x xc10 8 x x x x x 8 x x x x xc11 NSF NSFc12 NSF NSFc13 0 x x x x x x x x 0 x x x x x x x xc14 2 x 2 xc15 7 x x x x 7 x x x xc16 1 x x x x x 1 xc17 6 x x x x 6 x x x xc18 7 x x x 6 x x x
Tabla A.35: SBX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de FF y 2F.

88 Apéndice A. Apéndice
FF 2FFunción eta 0 1 2 3 4 5 6 7 8 9 eta 0 1 2 3 4 5 6 7 8 9c01 6 NED 0 NEDc02 5 x x 5 x xc03 NSF NSFc04 NSF NSFc05 1 x x x x x x 1 x x x x x xc06 2 x x x x x x x x 2 x x x x x xc07 9 x x x x x 9 x x x x xc08 9 x x x x x 9 x x x x xc09 6 x x x x 6 x x x xc10 8 x x x x x 8 x x x x xc11 NSF NSFc12 NSF NSFc13 0 x x x x x x x x 0 x x x x x x x xc14 2 x 2 xc15 7 x x x x 7 x x x xc16 1 x x x x x 1 xc17 6 x x x x 6 x x x xc18 7 x x x 6 x x x
Tabla A.36: SBX CEC2010 D=30. Resultados prueba de Friedman aplicadosa los resultados de 2NF y 1F-1NF.
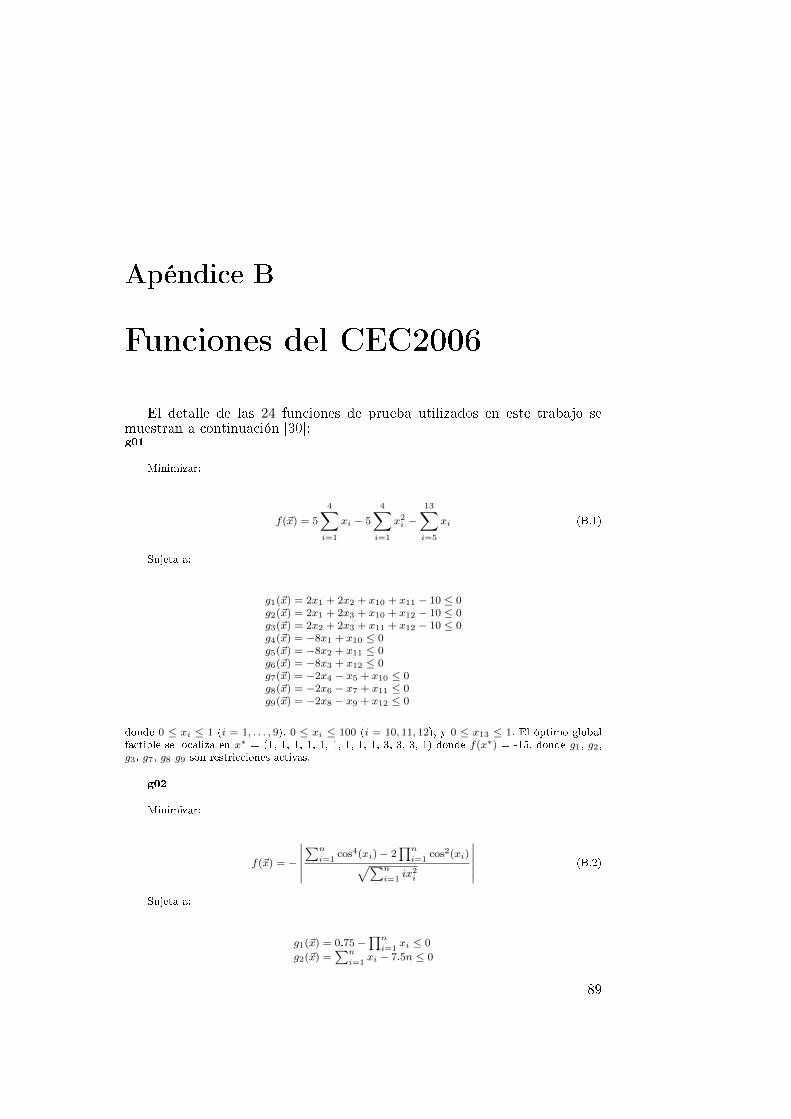
Apéndice B
Funciones del CEC2006
El detalle de las 24 funciones de prueba utilizados en este trabajo semuestran a continuación [30]:g01
Minimizar:
f(~x) = 5
4∑i=1
xi − 5
4∑i=1
x2i −13∑i=5
xi (B.1)
Sujeta a:
g1(~x) = 2x1 + 2x2 + x10 + x11 − 10 ≤ 0g2(~x) = 2x1 + 2x3 + x10 + x12 − 10 ≤ 0g3(~x) = 2x2 + 2x3 + x11 + x12 − 10 ≤ 0g4(~x) = −8x1 + x10 ≤ 0g5(~x) = −8x2 + x11 ≤ 0g6(~x) = −8x3 + x12 ≤ 0g7(~x) = −2x4 − x5 + x10 ≤ 0g8(~x) = −2x6 − x7 + x11 ≤ 0g9(~x) = −2x8 − x9 + x12 ≤ 0
donde 0 ≤ xi ≤ 1 (i = 1, . . . , 9), 0 ≤ xi ≤ 100 (i = 10, 11, 12), y 0 ≤ x13 ≤ 1. El óptimo globalfactible se localiza en x∗ = (1, 1, 1, 1, 1, 1, 1, 1, 1, 3, 3, 3, 1) donde f(x∗) = -15. donde g1, g2,g3, g7, g8 g9 son restricciones activas.
g02
Minimizar:
f(~x) = −
∣∣∣∣∣∑n
i=1cos4(xi)− 2
∏n
i=1cos2(xi)√∑n
i=1ix2i
∣∣∣∣∣ (B.2)
Sujeta a:
g1(~x) = 0.75−∏n
i=1xi ≤ 0
g2(~x) =∑n
i=1xi − 7.5n ≤ 0
89

90 Apéndice B. Funciones del CEC2006
donde n = 20 y 0 ≤ xi ≤ 10 (i = 1, . . . , n). La mejor solución conocida hasta el momento selocaliza en x∗ = (3,16246061572185,3,12833142812967, 3,09479212988791, 3,06145059523469, 3,02792915885555, 2,99382606701730,2,95866871765285, 2,92184227312450, 0,49482511456933, 0,48835711005490, 0,48231642711865,0,47664475092742, 0,47129550835493, 0,46623099264167, 0,46142004984199, 0,45683664767217,0,45245876903267, 0,44826762241853, 0,44424700958760, 0,44038285956317),con f(x∗) = −0,80361910412559. g1 cercano a ser solución activa.
g03
Minimizar:
f(~x) = −(√
n)n n∏
i=1
xi (B.3)
Sujeta a:
h(~x) =
n∑i=1
x2i − 1 = 0
donde n = 10 and 0 ≤ xi ≤ 1 (i = 1, . . . , n). El mínimo global factible es localizado en x∗i = 1/√n
(i = 1, . . . , n) donde f(x∗) = -1.00050010001000.
g04
Minimizar:
f(~x) = 5.3578547x23 + 0.8356891x1x5 + 37.293239x1 − 40792.141 (B.4)
Sujeta a:
g1(~x) = 85.334407 + 0.0056858x2x5 + 0.0006262x1x4 − 0.0022053x3x5 − 92 ≤ 0g2(~x) = −85.334407− 0.0056858x2x5 − 0.0006262x1x4 + 0.0022053x3x5 ≤ 0g3(~x) = 80.51249 + 0.0071317x2x5 + 0.0029955x1x2 + 0.0021813x23 − 110 ≤ 0g4(~x) = −80.51249− 0.0071317x2x5 − 0.0029955x1x2 − 0.0021813x23 + 90 ≤ 0g5(~x) = 9.300961 + 0.0047026x3x5 + 0.0012547x1x3 + 0.0019085x3x4 − 25 ≤ 0g6(~x) = −9.300961− 0.0047026x3x5 − 0.0012547x1x3 − 0.0019085x3x4 + 20 ≤ 0
donde: 78 ≤ x1 ≤ 102, 33 ≤ x2 ≤ 45, 27 ≤ xi ≤ 45 (i = 3, 4, 5). El óptimo global factible es loca-lizado en x∗ = (78, 33, 29,9952560256815985, 45, 36,7758129057882073) donde f(x∗)=-30665.539.g1 y g6 son restricciones activas.
g05
Minimizar:
f(~x) = 3x1 + 0.000001x31 + 2x2 + (0.000002/3)x32 (B.5)
Sujeta a:
g1(~x) = −x4 + x3 − 0.55 ≤ 0g2(~x) = −x3 + x4 − 0.55 ≤ 0
h3(~x) = 1000 sin(−x3 − 0.25) + 1000 sin(−x4 − 0.25) + 894.8− x1 = 0h4(~x) = 1000 sin(x3 − 0.25) + 1000 sin(x3 − x4 − 0.25) + 894.8− x2 = 0h5(~x) = 1000 sin(x4 − 0.25) + 1000 sin(x4 − x3 − 0.25) + 1294.8 = 0
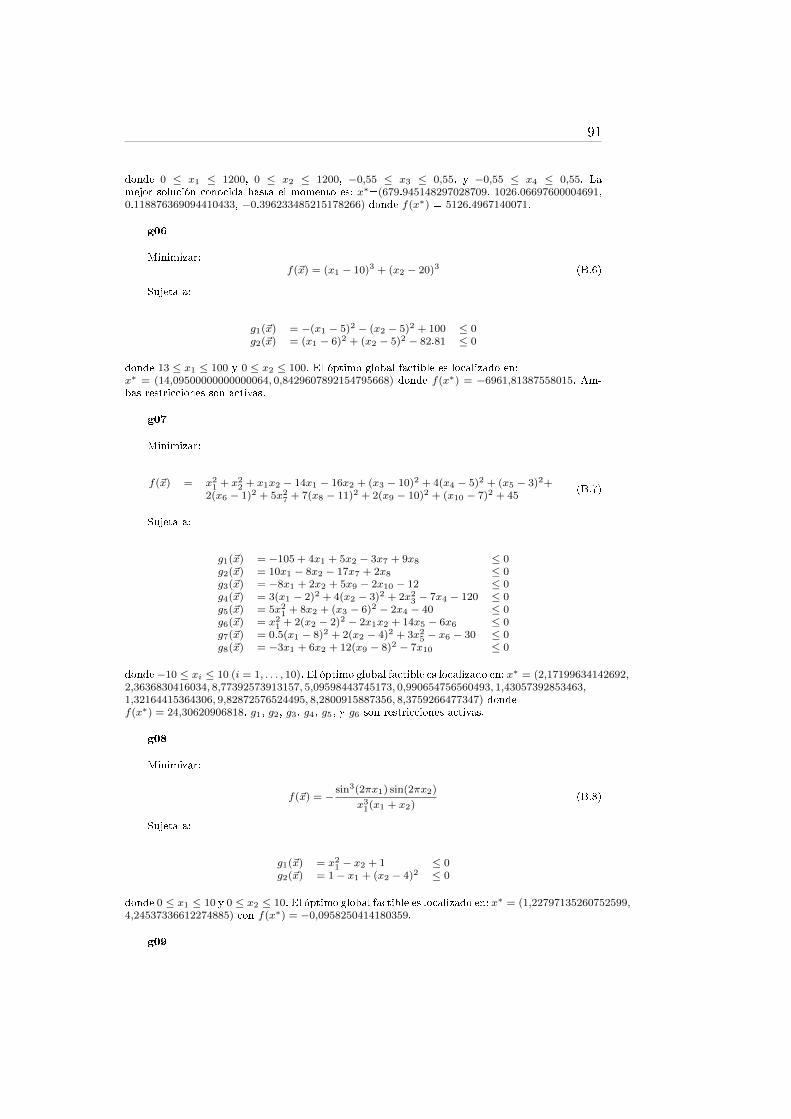
91
donde 0 ≤ x1 ≤ 1200, 0 ≤ x2 ≤ 1200, −0,55 ≤ x3 ≤ 0,55, y −0,55 ≤ x4 ≤ 0,55. Lamejor solución conocida hasta el momento es: x∗=(679.945148297028709, 1026.06697600004691,0.118876369094410433, −0.396233485215178266) donde f(x∗) = 5126.4967140071.
g06
Minimizar:f(~x) = (x1 − 10)3 + (x2 − 20)3 (B.6)
Sujeta a:
g1(~x) = −(x1 − 5)2 − (x2 − 5)2 + 100 ≤ 0g2(~x) = (x1 − 6)2 + (x2 − 5)2 − 82.81 ≤ 0
donde 13 ≤ x1 ≤ 100 y 0 ≤ x2 ≤ 100. El óptimo global factible es localizado en:x∗ = (14,09500000000000064, 0,8429607892154795668) donde f(x∗) = −6961,81387558015. Am-bas restricciones son activas.
g07
Minimizar:
f(~x) = x21 + x22 + x1x2 − 14x1 − 16x2 + (x3 − 10)2 + 4(x4 − 5)2 + (x5 − 3)2+2(x6 − 1)2 + 5x27 + 7(x8 − 11)2 + 2(x9 − 10)2 + (x10 − 7)2 + 45
(B.7)
Sujeta a:
g1(~x) = −105 + 4x1 + 5x2 − 3x7 + 9x8 ≤ 0g2(~x) = 10x1 − 8x2 − 17x7 + 2x8 ≤ 0g3(~x) = −8x1 + 2x2 + 5x9 − 2x10 − 12 ≤ 0g4(~x) = 3(x1 − 2)2 + 4(x2 − 3)2 + 2x23 − 7x4 − 120 ≤ 0g5(~x) = 5x21 + 8x2 + (x3 − 6)2 − 2x4 − 40 ≤ 0g6(~x) = x21 + 2(x2 − 2)2 − 2x1x2 + 14x5 − 6x6 ≤ 0g7(~x) = 0.5(x1 − 8)2 + 2(x2 − 4)2 + 3x25 − x6 − 30 ≤ 0g8(~x) = −3x1 + 6x2 + 12(x9 − 8)2 − 7x10 ≤ 0
donde−10 ≤ xi ≤ 10 (i = 1, . . . , 10). El óptimo global factible es localizado en: x∗ = (2,17199634142692,2,3636830416034, 8,77392573913157, 5,09598443745173, 0,990654756560493, 1,43057392853463,1,32164415364306, 9,82872576524495, 8,2800915887356, 8,3759266477347) dondef(x∗) = 24,30620906818. g1, g2, g3, g4, g5, y g6 son restricciones activas.
g08
Minimizar:
f(~x) = −sin3(2πx1) sin(2πx2)
x31(x1 + x2)(B.8)
Sujeta a:
g1(~x) = x21 − x2 + 1 ≤ 0g2(~x) = 1− x1 + (x2 − 4)2 ≤ 0
donde 0 ≤ x1 ≤ 10 y 0 ≤ x2 ≤ 10. El óptimo global factible es localizado en: x∗ = (1,22797135260752599,4,24537336612274885) con f(x∗) = −0,0958250414180359.
g09
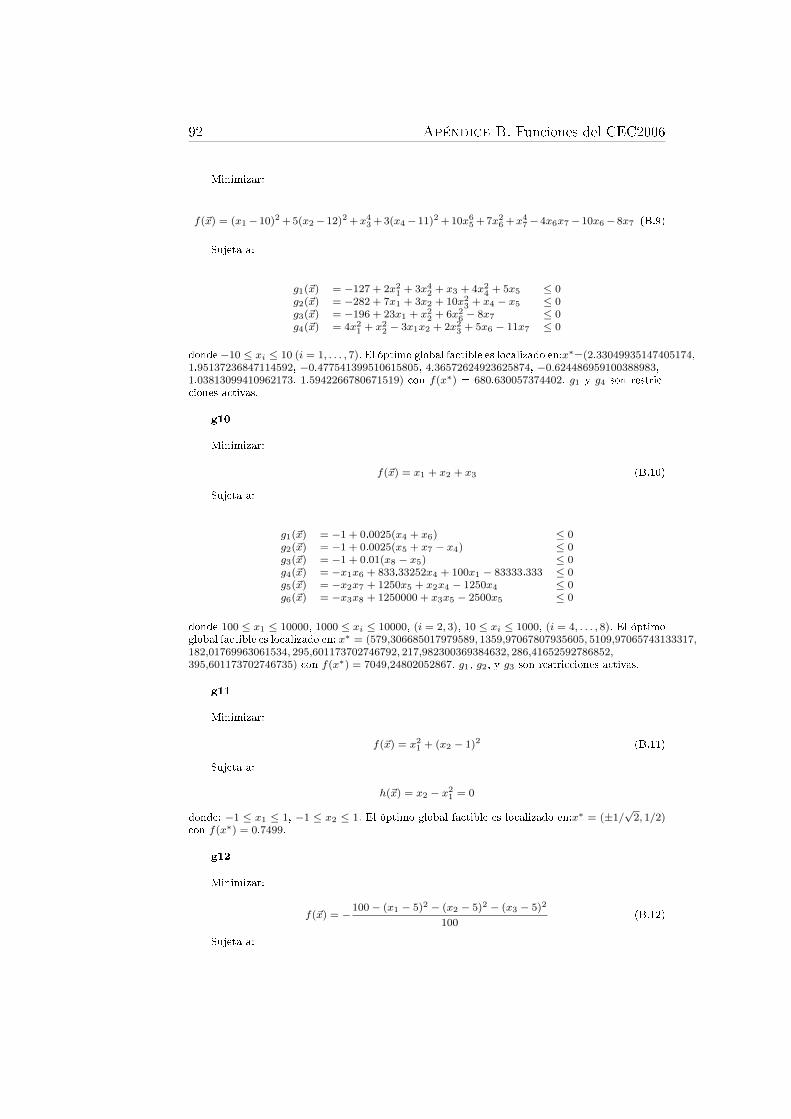
92 Apéndice B. Funciones del CEC2006
Minimizar:
f(~x) = (x1− 10)2 +5(x2− 12)2 +x43 +3(x4− 11)2 +10x65 +7x26 +x47− 4x6x7− 10x6− 8x7 (B.9)
Sujeta a:
g1(~x) = −127 + 2x21 + 3x42 + x3 + 4x24 + 5x5 ≤ 0g2(~x) = −282 + 7x1 + 3x2 + 10x23 + x4 − x5 ≤ 0g3(~x) = −196 + 23x1 + x22 + 6x26 − 8x7 ≤ 0g4(~x) = 4x21 + x22 − 3x1x2 + 2x23 + 5x6 − 11x7 ≤ 0
donde−10 ≤ xi ≤ 10 (i = 1, . . . , 7). El óptimo global factible es localizado en:x∗=(2.33049935147405174,1.95137236847114592, −0.477541399510615805, 4.36572624923625874, −0.624486959100388983,1.03813099410962173, 1.5942266780671519) con f(x∗) = 680.630057374402. g1 y g4 son restric-ciones activas.
g10
Minimizar:
f(~x) = x1 + x2 + x3 (B.10)
Sujeta a:
g1(~x) = −1 + 0.0025(x4 + x6) ≤ 0g2(~x) = −1 + 0.0025(x5 + x7 − x4) ≤ 0g3(~x) = −1 + 0.01(x8 − x5) ≤ 0g4(~x) = −x1x6 + 833.33252x4 + 100x1 − 83333.333 ≤ 0g5(~x) = −x2x7 + 1250x5 + x2x4 − 1250x4 ≤ 0g6(~x) = −x3x8 + 1250000 + x3x5 − 2500x5 ≤ 0
donde 100 ≤ x1 ≤ 10000, 1000 ≤ xi ≤ 10000, (i = 2, 3), 10 ≤ xi ≤ 1000, (i = 4, . . . , 8). El óptimoglobal factible es localizado en: x∗ = (579,306685017979589, 1359,97067807935605, 5109,97065743133317,182,01769963061534, 295,601173702746792, 217,982300369384632, 286,41652592786852,395,601173702746735) con f(x∗) = 7049,24802052867. g1, g2, y g3 son restricciones activas.
g11
Minimizar:
f(~x) = x21 + (x2 − 1)2 (B.11)
Sujeta a:
h(~x) = x2 − x21 = 0
donde: −1 ≤ x1 ≤ 1, −1 ≤ x2 ≤ 1. El óptimo global factible es localizado en:x∗ = (±1/√2, 1/2)
con f(x∗) = 0.7499.
g12
Minimizar:
f(~x) = −100− (x1 − 5)2 − (x2 − 5)2 − (x3 − 5)2
100(B.12)
Sujeta a:

93
g1(~x) = (x1 − p)2 + (x2 − q)2 + (x3 − r)2 − 0.0625 ≤ 0
donde 0 ≤ xi ≤ 10 (i = 1, 2, 3) y p, q, r = 1, 2, . . . , 9. La región factible consiste de 93 esferas dis-juntas. Un punto (x1, x2, x3) es factible si y sólo si existe p, q, r tales que la inigualdad de arribase mantiene. El óptimo global factible es localizado en: x∗ = (5, 5, 5) with f(x∗) = −1.

94 Apéndice B. Funciones del CEC2006
g13
Minimizar:
f(~x) = ex1x2x3x4 (B.13)
Sujeta a:
h1(~x) = x21 + x22 + x23 + x24 + x25 − 10 = 0h2(~x) = x2x3 − 5x4x5 = 0h3(~x) = x31 + x32 + 1 = 0
donde −2,3 ≤ xi ≤ 2,3 (i = 1, 2) y −3,2 ≤ xi ≤ 3,2 (1 = 3, 4, 5). El óptimo global factible es: ~x∗ =(−1,71714224003, 1,59572124049468, 1,8272502406271,−0,763659881912867,−0,76365986736498) conf( ~x∗) = 0,053941514041898.
g14
Minimizar:
f(~x) =
10∑i=1
xi
(ci + ln
xi∑10
j=1xj
)(B.14)
Sujeta a:
h1(~x) = x1 + 2x2 + 2x3 + x6 + x10 − 2 = 0h2(~x) = x4 + 2x5 + x6 + x7 − 1 = 0h3(~x) = x3 + x7 + x8 + 2x9 + x10 − 1 = 0
donde 0 < xi ≤ 10 (i = 1, ..., 10), y c1 = -6.089, c2 = -17.164, c3 = -34.054, c4 = -5.914, c5 =-24.721, c6 = -14.986, c9 = -26.662, c10 = -22.179. La mejor solución conocida hasta el momentoes: x∗ = (0,0406684113216282,0,147721240492452, 0,783205732104114, 0,00141433931889084, 0,485293636780388, 0,000693183051556082,0,0274052040687766, 0,0179509660214818, 0,0373268186859717, 0,0968844604336845) conf(x∗) = −47,7648884594915.
g15
Minimizar:f(~x) = 1000− x21 − 2x22 − x
23 − x1x2 − x1x3 (B.15)
Sujeta a:
h1(~x) = x21 + x22 + x23 − 25 = 0h2(~x) = 8x1 + 14x2 + 7x3 − 56 = 0
donde 0 ≤ xi ≤ 10 (i = 1, 2, 3). La mejor solución conocida hasta el momento es: x∗ =(3,51212812611795133,0,216987510429556135, 3,55217854929179921) con f(x∗) = 961,715022289961.
g16
Minimizar:
f(~x) = 0.000117y14 + 0.1365 + 0.00002358y13 + 0.000001502y16+ 0.0321y12 + 0.004324y5 + 0.0001 c15
c16+ 37.48 y2
c12− 0.0000005843y17
(B.16)
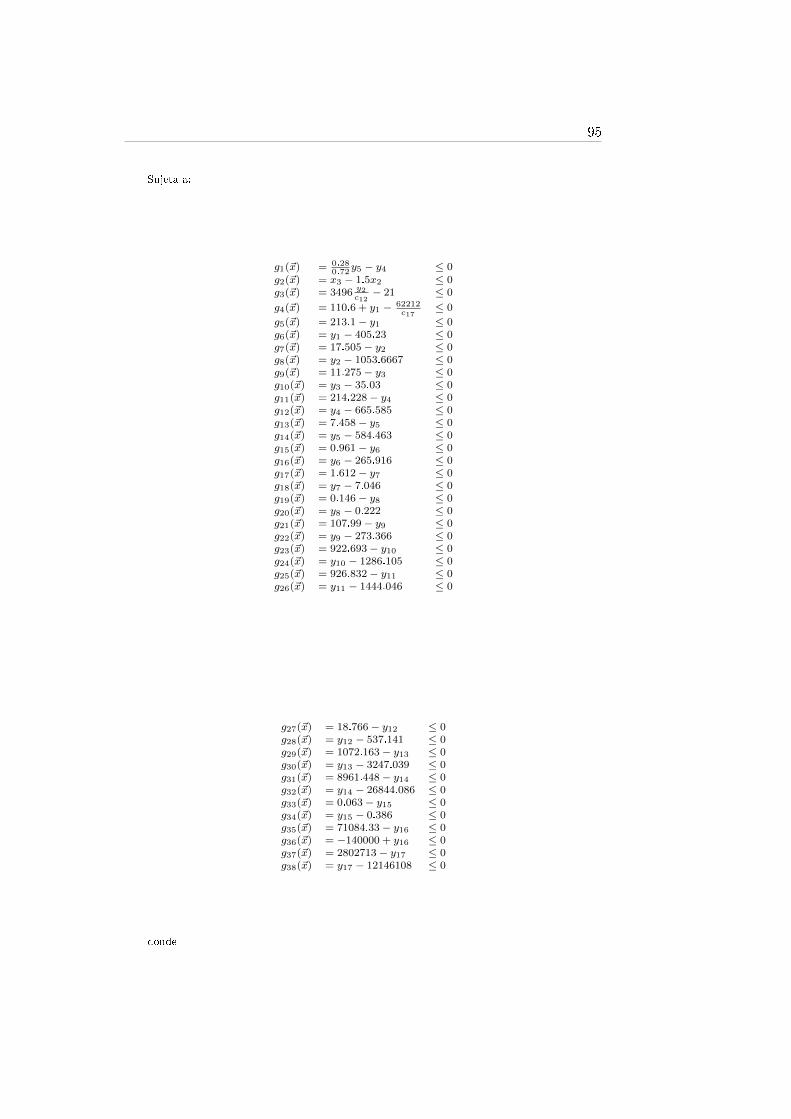
95
Sujeta a:
g1(~x) = 0.280.72y5 − y4 ≤ 0
g2(~x) = x3 − 1.5x2 ≤ 0g3(~x) = 3496 y2
c12− 21 ≤ 0
g4(~x) = 110.6 + y1 − 62212c17
≤ 0
g5(~x) = 213.1− y1 ≤ 0g6(~x) = y1 − 405.23 ≤ 0g7(~x) = 17.505− y2 ≤ 0g8(~x) = y2 − 1053.6667 ≤ 0g9(~x) = 11.275− y3 ≤ 0g10(~x) = y3 − 35.03 ≤ 0g11(~x) = 214.228− y4 ≤ 0g12(~x) = y4 − 665.585 ≤ 0g13(~x) = 7.458− y5 ≤ 0g14(~x) = y5 − 584.463 ≤ 0g15(~x) = 0.961− y6 ≤ 0g16(~x) = y6 − 265.916 ≤ 0g17(~x) = 1.612− y7 ≤ 0g18(~x) = y7 − 7.046 ≤ 0g19(~x) = 0.146− y8 ≤ 0g20(~x) = y8 − 0.222 ≤ 0g21(~x) = 107.99− y9 ≤ 0g22(~x) = y9 − 273.366 ≤ 0g23(~x) = 922.693− y10 ≤ 0g24(~x) = y10 − 1286.105 ≤ 0g25(~x) = 926.832− y11 ≤ 0g26(~x) = y11 − 1444.046 ≤ 0
g27(~x) = 18.766− y12 ≤ 0g28(~x) = y12 − 537.141 ≤ 0g29(~x) = 1072.163− y13 ≤ 0g30(~x) = y13 − 3247.039 ≤ 0g31(~x) = 8961.448− y14 ≤ 0g32(~x) = y14 − 26844.086 ≤ 0g33(~x) = 0.063− y15 ≤ 0g34(~x) = y15 − 0.386 ≤ 0g35(~x) = 71084.33− y16 ≤ 0g36(~x) = −140000 + y16 ≤ 0g37(~x) = 2802713− y17 ≤ 0g38(~x) = y17 − 12146108 ≤ 0
donde

96 Apéndice B. Funciones del CEC2006
y1 = x2 + x3 + 41.6c1 = 0.024x4 − 4.62y2 = 12.5
c1+ 12
c2 = 0.0003535x21 + .5311x1 + 0.08705y2x1c3 = 0.052x1 + 78 + 0.002377y2x1y3 = c2
c3y4 = 19y3
c4 = 0.04782(x1 − y3) + 0.1956(x1−y3)2
x2+ 0.6376y4 + 1.594y3
c5 = 100x2c6 = x1 − y3 − y4c7 = 0.950− c4
c5y5 = c6c7y6 = x1 − y5 − y4 − y3c8 = (y5 + y4)0.995y7 = c8
y1y8 = c8
3798
c9 = y7 − 0.0663y7y8
− 0.3153
y9 = 96.82c9
+ 0.321y1y10 = 1.29y5 + 1.258y4 + 2.29y3 + 1.71y6y11 = 1.71x1 − 0.452y4 + 0.580y3c10 = 12.3
752.3c11 = (1.75y2)(0.995x1)c12 = 0.995y10 + 1998y12 = c10x1 + c11
c12y13 = c12 + 1.75y2y14 = 3623 + 64.4x2 + 58.4x3 + 146312
y9+x5
c13 = 0.995y10 + 60.8x2 + 48x4 − 0.1121y14 − 5095y15 = y13
c13y16 = 148000− 331000y15 + 40y13 − 61y15y13c14 = 2324y10 − 28740000y2y17 = 14130000− 1328y10 − 531y11 + c14
c12c15 = y13
y15− y13
0.52c16 = 1.104− 0.72y15c17 = y9 + x5
y donde 704.4148 ≤ x1 ≤ 906.3855, 68.6 ≤ x2 ≤ 288.88, 0 ≤ x3 ≤ 134.75, 193 ≤ x4 ≤ 287.0966, y25 ≤ x5 ≤ 84.1988.
La mejor solución conocida hasta el momento es: x∗ = (705,174537070090537, 68,5999999999999943,102,899999999999991, 282,324931593660324, 37,5841164258054832) con f(x∗) = −1,90515525853479.
g17
Minimizar:
f(~x) = f(x1) + f(x2) (B.17)

97
donde
f1(x1) =
{30x1 0 ≤ x1 < 30031x1 300 ≤ x1 < 400
f2(x2) =
{28x2 0 ≤ x2 < 10029x2 100 ≤ x2 < 20030x2 200 ≤ x2 < 1000
Sujeta a:
h1(~x) = −x1 + 300− x3x4131.078 cos(1.48477− x6) +
0.90798x23
131.078 cos(1.47588)
h2(~x) = −x2 − x3x4131.078 cos(1.48477 + x6) +
0.90798x24
131.078 cos(1.47588)
h3(~x) = −x5 − x3x4131.078 sin(1.48477 + x6) +
0.90798x24
131.078 sin(1.47588)
h4(~x) = 200− x3x4131.078 sin(1.48477− x6) +
0.90798x24
131.078 sin(1.47588)
y donde 0 ≤ x1 ≤ 400, 0 ≤ x2 ≤ 1000, 340 ≤ x3 ≤ 420, 340 ≤ x4 ≤ 420,−1000 ≤ x5 ≤ 1000, y 0 ≤x6 ≤ 0.5236. La mejor solución conocida hasta el momento es: x∗ = (201,784467214523659, 99,9999999999999005,383,071034852773266, 420,−10,9076584514292652, 0,0731482312084287128) conf(x∗) = 8853,53967480648.
g18
Minimizar:
f(~x) = −0.5(x1x4 − x2x3 + x3x9 − x5x9 + x5x8 − x6x7) (B.18)
Sujeta a:
g1(~x) = x23 + x24 − 1 ≤ 0g2(~x) = x29 − 1 ≤ 0g3(~x) = x25 + x26 − 1 ≤ 0g4(~x) = x21 + (x2 − x9)2 − 1 ≤ 0g5(~x) = (x1 − x5)2 + (x2 − x6)2 − 1 ≤ 0g6(~x) = (x1 − x7)2 + (x2 − x8)2 − 1 ≤ 0
g7(~x) = (x3 − x5)2 + (x4 − x6)2 − 1 ≤ 0g8(~x) = (x3 − x7)2 + (x4 − x8)2 − 1 ≤ 0g9(~x) = x27 + (x8 − x9)2 − 1 ≤ 0g10(~x) = x2x3 − x1x4 ≤ 0g11(~x) = −x3x9 ≤ 0g12(~x) = x5x9 ≤ 0g13(~x) = x6x7 − x5x8 ≤ 0
donde −10 ≤ xi ≤ 10 (i = 1, ..., 8) y 0 ≤ x9 ≤ 20. La mejor solución conocida hasta el momentoes:x∗ = (−0,657776192427943163,−0,153418773482438542, 0,323413871675240938,−0,946257611651304398,−0,657776194376798906,−0,753213434632691414, 0,323413874123576972,− 0,346462947962331735, 0,59979466285217542) con f(x∗) = −0,866025403784439.
g19

98 Apéndice B. Funciones del CEC2006
Minimizar:
f(~x) =
5∑j=1
5∑i=1
cijx(10+j)x(10+j) + 2
5∑j=1
djx3(10+j) −
10∑i=1
bixi (B.19)
Sujeta a:
gj(~x) = −2∑5
i=1cijx(10+i) − ej +
∑10
i=1aijxi ≤ 0 j = 1, . . . , 5
donde ~b = [-40, -2, -0.25, -4, -4, -1, -40, -60, 5, 1] y el resto de los valores es tomado de laTabla B.1, 0 ≤ xi ≤ 10 (i = 1, . . . , 15). La mejor solución conocida hasta el momento es:x∗ = (1.66991341326291344e−17,3.95378229282456509e−16, 3.94599045143233784, 1.06036597479721211e−16, 3.2831773458454161,9.99999999999999822, 1.12829414671605333e−17, 1.2026194599794709e−17, 2.50706276000769697e−15,2.24624122987970677e−15, 0.370764847417013987, 0.278456024942955571, 0.523838487672241171,0.388620152510322781, 0.298156764974678579) con f(x∗) = 32,6555929502463.
j 1 2 3 4 5
ej -15 -27 -36 -18 -12c1j 30 -20 -10 32 -10c2j -20 39 -6 -31 32c3j -10 -6 10 -6 -10c4j 32 -31 -6 39 -20c5j -10 32 -10 -20 30dj 4 8 10 6 2a1j -16 2 0 1 0a2j 0 -2 0 0.4 2a3j -3.5 0 2 0 0a4j 0 -2 0 -4 -1a5j 0 -9 -2 1 -2.8a6j 2 0 -4 0 0a7j -1 -1 -1 -1 -1a9j 1 2 3 4 5a10j 1 1 1 1 1
Tabla B.1: Conjunto de datos para el problema g19
g20
Minimizar:
f(~x) =
24∑i=1
aixi (B.20)
Sujeta a:
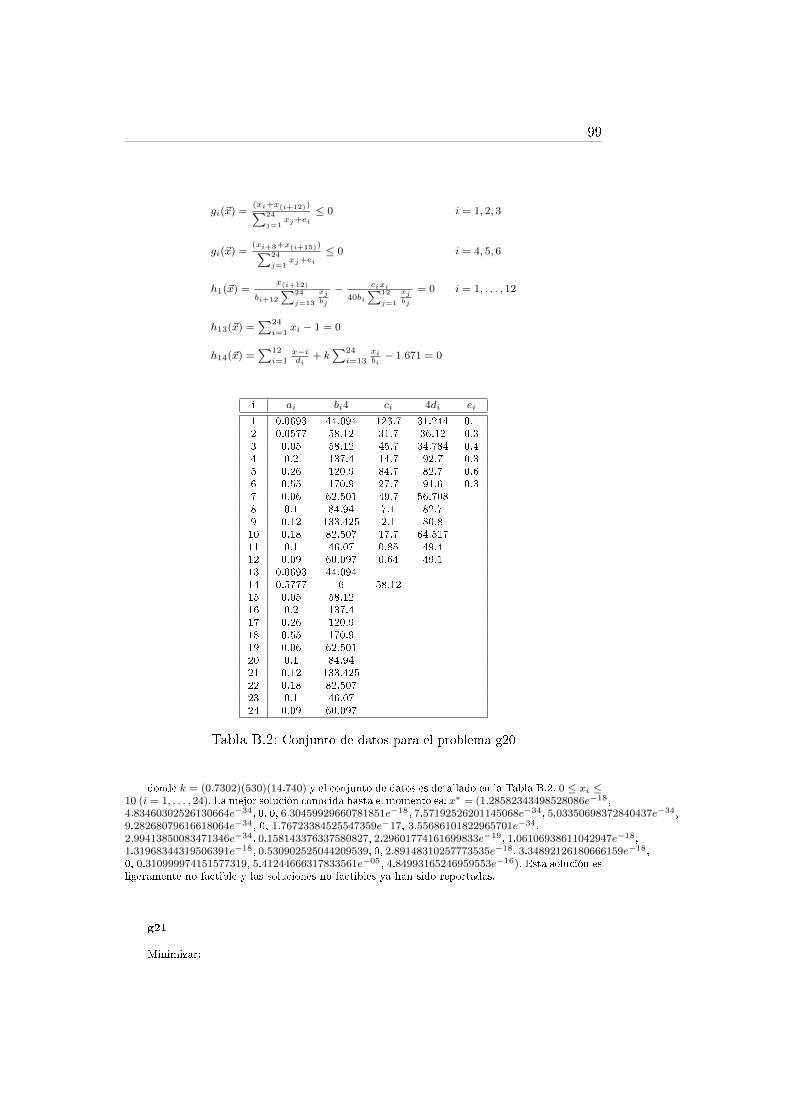
99
gi(~x) =(xi+x(i+12))∑24
j=1xj+ei
≤ 0 i = 1, 2, 3
gi(~x) =(xi+3+x(i+15))∑24
j=1xj+ei
≤ 0 i = 4, 5, 6
h1(~x) =x(i+12)
bi+12
∑24
j=13
xjbj
− cixi
40bi
∑12
j=1
xjbj
= 0 i = 1, . . . , 12
h13(~x) =∑24
i=1xi − 1 = 0
h14(~x) =∑12
i=1x−idi
+ k∑24
i=13xibi− 1.671 = 0
i ai bi4 ci 4di ei
1 0.0693 44.094 123.7 31.244 0.12 0.0577 58.12 31.7 36.12 0.33 0.05 58.12 45.7 34.784 0.44 0.2 137.4 14.7 92.7 0.35 0.26 120.9 84.7 82.7 0.66 0.55 170.9 27.7 91.6 0.37 0.06 62.501 49.7 56.7088 0.1 84.94 7.1 82.79 0.12 133.425 2.1 80.810 0.18 82.507 17.7 64.51711 0.1 46.07 0.85 49.412 0.09 60.097 0.64 49.113 0.0693 44.09414 0.5777 6 58.1215 0.05 58.1216 0.2 137.417 0.26 120.918 0.55 170.919 0.06 62.50120 0.1 84.9421 0.12 133.42522 0.18 82.50723 0.1 46.0724 0.09 60.097
Tabla B.2: Conjunto de datos para el problema g20
donde k = (0.7302)(530)(14.740) y el conjunto de datos es detallado en la Tabla B.2. 0 ≤ xi ≤10 (i = 1, . . . , 24). La mejor solución conocida hasta el momento es: x∗ = (1.28582343498528086e−18,4.83460302526130664e−34, 0, 0, 6.30459929660781851e−18, 7.57192526201145068e−34, 5.03350698372840437e−34,9.28268079616618064e−34, 0, 1.76723384525547359e−17, 3.55686101822965701e−34,2.99413850083471346e−34, 0.158143376337580827, 2.29601774161699833e−19, 1.06106938611042947e−18,1.31968344319506391e−18, 0.530902525044209539, 0, 2.89148310257773535e−18, 3.34892126180666159e−18,0, 0.310999974151577319, 5.41244666317833561e−05, 4.84993165246959553e−16). Esta solución esligeramente no factible y las soluciones no factibles ya han sido reportadas.
g21
Minimizar:
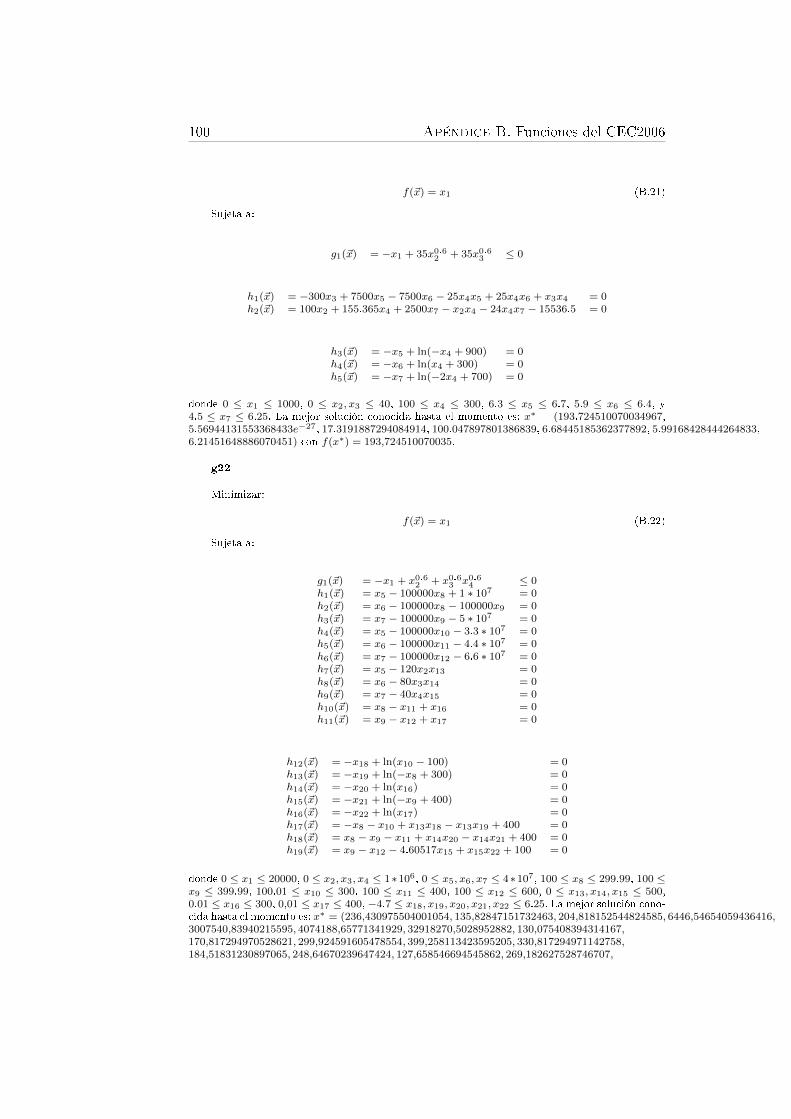
100 Apéndice B. Funciones del CEC2006
f(~x) = x1 (B.21)
Sujeta a:
g1(~x) = −x1 + 35x0.62 + 35x0.63 ≤ 0
h1(~x) = −300x3 + 7500x5 − 7500x6 − 25x4x5 + 25x4x6 + x3x4 = 0h2(~x) = 100x2 + 155.365x4 + 2500x7 − x2x4 − 24x4x7 − 15536.5 = 0
h3(~x) = −x5 + ln(−x4 + 900) = 0h4(~x) = −x6 + ln(x4 + 300) = 0h5(~x) = −x7 + ln(−2x4 + 700) = 0
donde 0 ≤ x1 ≤ 1000, 0 ≤ x2, x3 ≤ 40, 100 ≤ x4 ≤ 300, 6.3 ≤ x5 ≤ 6.7, 5.9 ≤ x6 ≤ 6.4, y4.5 ≤ x7 ≤ 6.25. La mejor solución conocida hasta el momento es: x∗ = (193.724510070034967,5.56944131553368433e−27, 17.3191887294084914, 100.047897801386839, 6.68445185362377892, 5.99168428444264833,6.21451648886070451) con f(x∗) = 193,724510070035.
g22
Minimizar:
f(~x) = x1 (B.22)
Sujeta a:
g1(~x) = −x1 + x0.62 + x0.63 x0.64 ≤ 0h1(~x) = x5 − 100000x8 + 1 ∗ 107 = 0h2(~x) = x6 − 100000x8 − 100000x9 = 0h3(~x) = x7 − 100000x9 − 5 ∗ 107 = 0h4(~x) = x5 − 100000x10 − 3.3 ∗ 107 = 0h5(~x) = x6 − 100000x11 − 4.4 ∗ 107 = 0h6(~x) = x7 − 100000x12 − 6.6 ∗ 107 = 0h7(~x) = x5 − 120x2x13 = 0h8(~x) = x6 − 80x3x14 = 0h9(~x) = x7 − 40x4x15 = 0h10(~x) = x8 − x11 + x16 = 0h11(~x) = x9 − x12 + x17 = 0
h12(~x) = −x18 + ln(x10 − 100) = 0h13(~x) = −x19 + ln(−x8 + 300) = 0h14(~x) = −x20 + ln(x16) = 0h15(~x) = −x21 + ln(−x9 + 400) = 0h16(~x) = −x22 + ln(x17) = 0h17(~x) = −x8 − x10 + x13x18 − x13x19 + 400 = 0h18(~x) = x8 − x9 − x11 + x14x20 − x14x21 + 400 = 0h19(~x) = x9 − x12 − 4.60517x15 + x15x22 + 100 = 0
donde 0 ≤ x1 ≤ 20000, 0 ≤ x2, x3, x4 ≤ 1∗106, 0 ≤ x5, x6, x7 ≤ 4∗107, 100 ≤ x8 ≤ 299.99, 100 ≤x9 ≤ 399.99, 100.01 ≤ x10 ≤ 300, 100 ≤ x11 ≤ 400, 100 ≤ x12 ≤ 600, 0 ≤ x13, x14, x15 ≤ 500,0.01 ≤ x16 ≤ 300, 0,01 ≤ x17 ≤ 400, −4.7 ≤ x18, x19, x20, x21, x22 ≤ 6.25. La mejor solución cono-cida hasta el momento es: x∗ = (236,430975504001054, 135,82847151732463, 204,818152544824585, 6446,54654059436416,3007540,83940215595, 4074188,65771341929, 32918270,5028952882, 130,075408394314167,170,817294970528621, 299,924591605478554, 399,258113423595205, 330,817294971142758,184,51831230897065, 248,64670239647424, 127,658546694545862, 269,182627528746707,
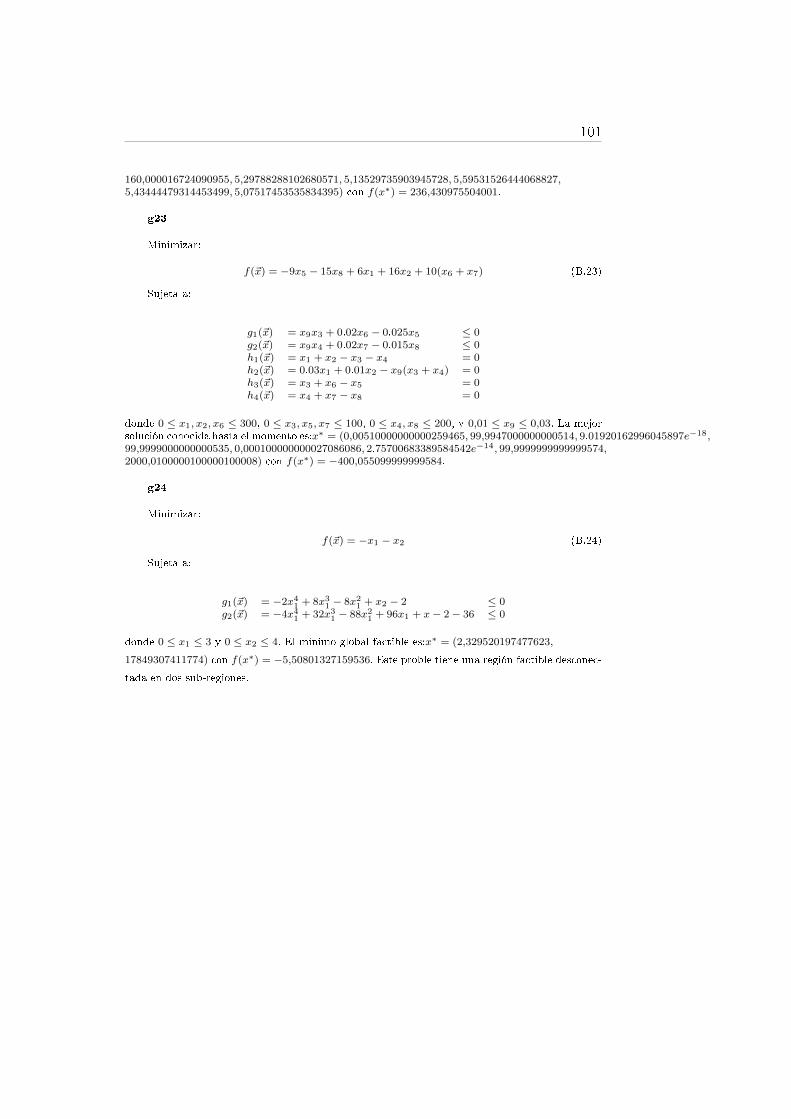
101
160,000016724090955, 5,29788288102680571, 5,13529735903945728, 5,59531526444068827,5,43444479314453499, 5,07517453535834395) con f(x∗) = 236,430975504001.
g23
Minimizar:
f(~x) = −9x5 − 15x8 + 6x1 + 16x2 + 10(x6 + x7) (B.23)
Sujeta a:
g1(~x) = x9x3 + 0.02x6 − 0.025x5 ≤ 0g2(~x) = x9x4 + 0.02x7 − 0.015x8 ≤ 0h1(~x) = x1 + x2 − x3 − x4 = 0h2(~x) = 0.03x1 + 0.01x2 − x9(x3 + x4) = 0h3(~x) = x3 + x6 − x5 = 0h4(~x) = x4 + x7 − x8 = 0
donde 0 ≤ x1, x2, x6 ≤ 300, 0 ≤ x3, x5, x7 ≤ 100, 0 ≤ x4, x8 ≤ 200, y 0,01 ≤ x9 ≤ 0,03. La mejorsolución conocida hasta el momento es:x∗ = (0,00510000000000259465, 99,9947000000000514, 9.01920162996045897e−18,99,9999000000000535, 0,000100000000027086086, 2.75700683389584542e−14, 99,9999999999999574,2000,0100000100000100008) con f(x∗) = −400,055099999999584.
g24
Minimizar:
f(~x) = −x1 − x2 (B.24)
Sujeta a:
g1(~x) = −2x41 + 8x31 − 8x21 + x2 − 2 ≤ 0g2(~x) = −4x41 + 32x31 − 88x21 + 96x1 + x− 2− 36 ≤ 0
donde 0 ≤ x1 ≤ 3 y 0 ≤ x2 ≤ 4. El mínimo global factible es:x∗ = (2,329520197477623,
17849307411774) con f(x∗) = −5,50801327159536. Este proble tiene una región factible desconec-
tada en dos sub-regiones.

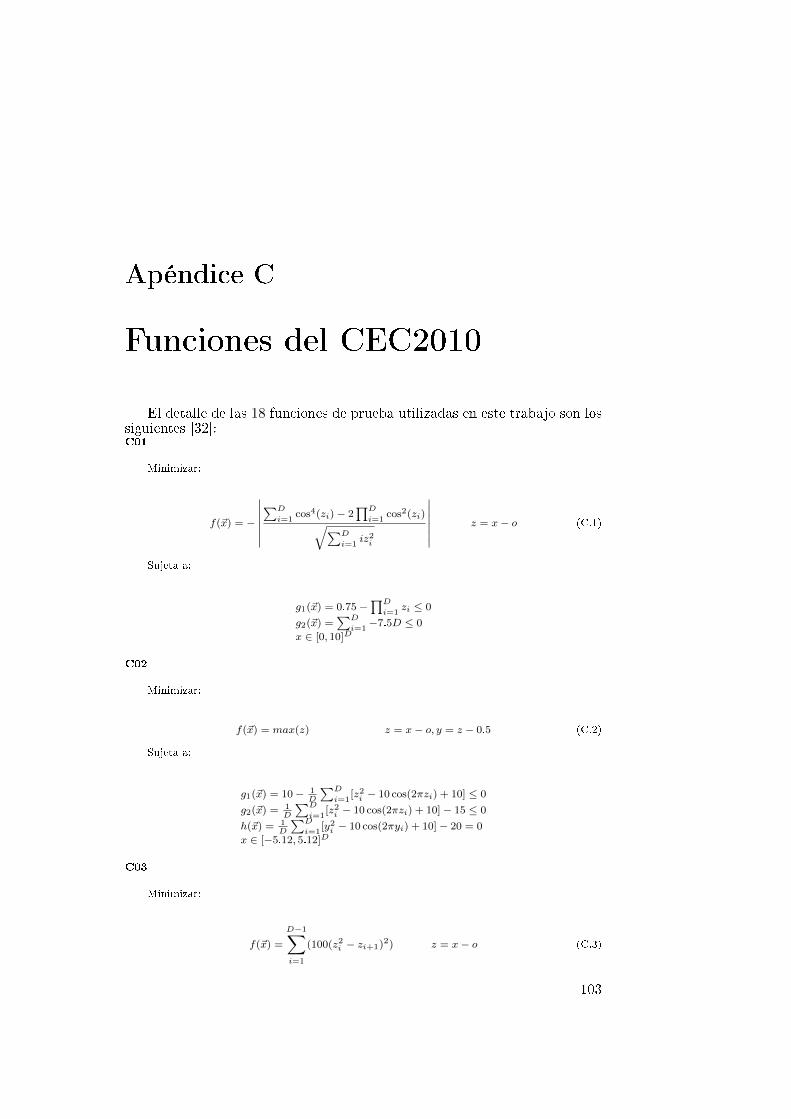
Apéndice C
Funciones del CEC2010
El detalle de las 18 funciones de prueba utilizadas en este trabajo son lossiguientes [32]:C01
Minimizar:
f(~x) = −
∣∣∣∣∣∣∑D
i=1cos4(zi)− 2
∏D
i=1cos2(zi)√∑D
i=1iz2i
∣∣∣∣∣∣ z = x− o (C.1)
Sujeta a:
g1(~x) = 0.75−∏D
i=1zi ≤ 0
g2(~x) =∑D
i=1−7.5D ≤ 0
x ∈ [0, 10]D
C02
Minimizar:
f(~x) = max(z) z = x− o, y = z − 0.5 (C.2)
Sujeta a:
g1(~x) = 10− 1D
∑D
i=1[z2i − 10 cos(2πzi) + 10] ≤ 0
g2(~x) =1D
∑D
i=1[z2i − 10 cos(2πzi) + 10]− 15 ≤ 0
h(~x) = 1D
∑D
i=1[y2i − 10 cos(2πyi) + 10]− 20 = 0
x ∈ [−5.12, 5.12]D
C03
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2) z = x− o (C.3)
103

104 Apéndice C. Funciones del CEC2010
Sujeta a:
h(~x) =∑D−1
i=1(zi − zi+1)
2 = 0
x ∈ [−1000, 1000]D
C04
Minimizar:
f(~x) = max(z) z = x− o (C.4)
Sujeta a:
h1(~x) =1D
∑D
i=1(zi cos(
√|zi|)) = 0
h2(~x) =∑D/2−1
i=1(zi − zi+1)
2 = 0
h3(~x) =∑D−1
i=D/2+1(z2i − zi+1)
2 = 0
h4(~x) =∑D
i=1z = 0
x ∈ [−50, 50]D
C05
Minimizar:
f(~x) = max(z) z = x− o (C.5)
Sujeta a:
h1(~x) =1D
∑D
i=1(−zi sin(
√|zi|)) = 0
h2(~x) =1D
∑D
i=1(−zi cos(0.5
√|zi|)) = 0
x ∈ [−600, 600]D
C06
Minimizar:
f(~x) = max(z) (C.6)
z = x− o, y = (x+ 4,83.6106156535− o)M − 483.6106156535
Sujeta a:
h1(~x) =1D
∑D
i=1(−yi sin(
√|yi|)) = 0
h2(~x) =1D
∑D
i=1(−yi cos(0.5
√|yi|)) = 0
x ∈ [−600, 600]D
C07
Minimizar:
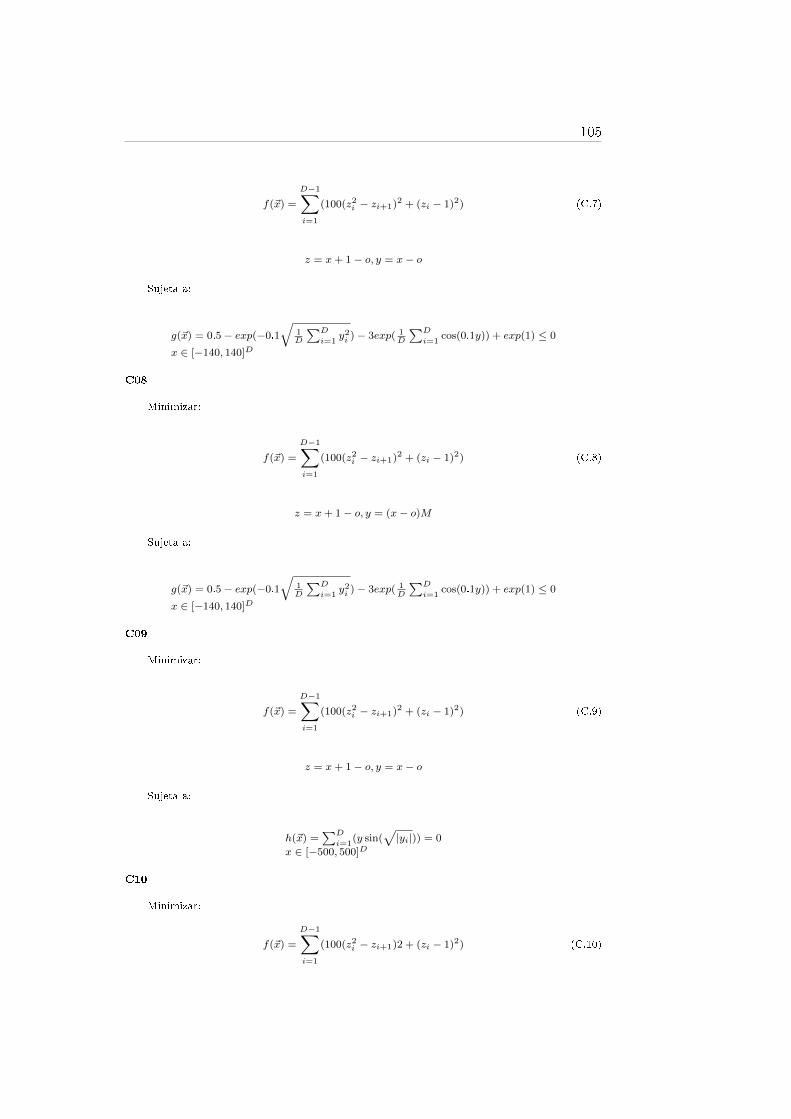
105
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.7)
z = x+ 1− o, y = x− o
Sujeta a:
g(~x) = 0.5− exp(−0.1√
1D
∑D
i=1y2i )− 3exp( 1
D
∑D
i=1cos(0.1y)) + exp(1) ≤ 0
x ∈ [−140, 140]D
C08
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.8)
z = x+ 1− o, y = (x− o)M
Sujeta a:
g(~x) = 0.5− exp(−0.1√
1D
∑D
i=1y2i )− 3exp( 1
D
∑D
i=1cos(0.1y)) + exp(1) ≤ 0
x ∈ [−140, 140]D
C09
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.9)
z = x+ 1− o, y = x− o
Sujeta a:
h(~x) =∑D
i=1(y sin(
√|yi|)) = 0
x ∈ [−500, 500]D
C10
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.10)
106 Apéndice C. Funciones del CEC2010
z = x+ 1− o, y = (x− o)M
Sujeta a:
h(x) =∑D
i=1(y sin(
√|yi|) = 0
x ∈ [−500, 500]D
C11
Minimizar:
f(~x) =1
D
D∑i=1
(−zi cos(2√|zi|)) (C.11)
z = (x− o)M, y = x+ 1− o
Sujeta a:
h(x) =∑D−1
i=1(100(y2i − yi+1)
2 + (yi − 1)2) = 0
x ∈ [−100, 100]D
C12
Minimizar:
f(~x) =
D∑i=1
(zi sin(√|zi|)) (C.12)
z = x− o
Sujeta a:
h(~x) =∑D−1
i=1(z2 − zi+1)
2 = 0
g(~x) =∑D
i=1(z − 100 cos(0.1z) + 10) ≤ 0
x ∈ [−1000, 1000]D
C13
Minimizar:
f(~x) =1
D
D∑i=1
(−zi sin(√|zi|)) (C.13)
z = x− o
Sujeta a:

107
g1(~x) = −50 + 1100D
∑D
iz2i ≤ 0
g2(~x) =50D
∑D
i=1sin( 1
50πz) ≤ 0
g3(~x) = 75− 50(∑D
i=1
z2i4000
−∏D
i=1cos( zi√
i) + 1) ≤ 0
x ∈ [−500, 500]D
C14
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.14)
z = x+ 1− o, y = x− o
Sujeta a:
g1(~x) =∑D
i=1(−yi cos(
√|yi|))−D ≤ 0
g2(~x) =∑D
i=1(yi cos(
√|yi|))−D ≤ 0
g3(~x) =∑D
i=1(yi sin(
√|yi|))− 10D ≤ 0
x ∈ [−1000, 1000]D
C15
Minimizar:
f(~x) =
D−1∑i=1
(100(z2i − zi+1)2 + (zi − 1)2) (C.15)
z = x+ 1− o, y = (x− o)M
Sujeta a:
g1(~x) =∑D
i=1(−yi cos(
√|yi|))−D ≤ 0
g2(~x) =∑D
i=1(yi cos(
√|yi|))−D ≤ 0
g3(~x) =∑D
i=1(yi sin(
√|yi|))− 10D ≤ 0
x ∈ [−1000, 1000]D
C16

108 Apéndice C. Funciones del CEC2010
Minimizar:
f(~x) =
D∑i=1
z2i4000
−D∏i=1
cos(zi√i) + 1 (C.16)
z = x− o
Sujeta a:
g1(~x) =∑D
i=1
[z2i − 100 cos(πz) + 10
]≤ 0
g2(~x) =∏D
i=1zi ≤ 0
h1(~x) =∑D
i=1(zi sin(
√|zi|)) = 0
h2(~x) =∑D
i=1(−zi sin(
√|zi|)) = 0
x ∈ [−10, 10]D
C17
Minimizar:
f(~x) =
D−1∑i=1
(zi − zi+1)2 (C.17)
z = x− o
Sujeta a:
g1(~x) =∏D
i=1zi ≤ 0
g1(~x) =∑D
i=1zi ≤ 0
h1(~x) =∑D
i=1(zi sin(4
√|zi|)) = 0
x ∈ [−10, 10]D
C18
Minimizar:
f(~x) =
D−1∑i=1
(zi − zi+1)2 (C.18)
z = x− o
Sujeta a:
g(~x) = 1D
∑D
i=1(−zi sin(
√|zi|)) ≤ 0
h(~x) = 1D
∑D
i=1(zi sin(
√|zi|)) = 0
x ∈ [−50, 50]D
Referencias
Y así, del mucho leer y del poco dormir,
se le secó el celebro de manera que vino
a perder el juicio.
Miguel de Cervantes Saavedra
[1] Andreas A. and Wu-Sheng L. Practical Optimization, Algorithms and Engineering Applica-tions. Springer, 2007.
[2] A.Wetzel. Evaluation of E�ectiveness of Genetic Algorithms in Combinatorial Optimization.PhD thesis, University of Pittsburgh, 1983.
[3] D. Ortiz B., R. Del Castillo G., N. Garcia P., and C. Hervas M. Crossover e�ect over penaltymethods in function optimization with constraints. In Evolutionary Computation, 2005. The2005 IEEE Congress on, volume 2, pages 1127�1134 Vol. 2, 2005.
[4] D. Ortiz B., C. Hervás M., and N. García P. Crossover operator e�ect in function optimizationwith constraints. In Proceedings of the 7th International Conference on Parallel ProblemSolving from Nature, PPSN VII, pages 184�193, London, UK, UK, 2002. Springer-Verlag.
[5] J.E. Baker. Reducing bias and ine�ciency in the selection algorithm. In Proceedings of theSecond International Conference on Genetic Algorithms on Genetic Algorithms and TheirApplication, pages 14�21, Hillsdale, NJ, USA, 1987. L. Erlbaum Associates Inc.
[6] E. Baldwin. Genética elemental. Limusa, 1983.
[7] T. Bäck. Evolutionay algorithms in Theory and Practice,. Oxford University Press, NewYork, 1996.
[8] H. G. Beyer and K. Deb. On self-adaptive features in real-parameter evolutionary algorithms.Evolutionary Computation, IEEE Transactions on, 5(3):250�270, Jun 2001.
[9] A. Brindle. Genetic Algorithms for Function Optimization. PhD thesis, Department ofComputer Science of the University of Alberta, Alberta, Canada� 1981.
[10] C.A. Coello C. Theoretical and numerical constraint-handling techniques used with evolutio-nary algorithms: a survey of the state of the art. Computer Methods in Applied Mechanicsand Engineering, 191(11-12):1245�1287, 2002.
[11] C. R. Darwin. The Origin of Species by Means of Natural Selection, or The Preservation ofFavoured Races in the Struggle for Life. Penguin Books, Nueva York, EE. UU� 1959.
[12] K. Deb. An e�cient constraint handling method for genetic algorithms. Computer Methodsin Applied Mechanics and Engineering, 186(2-4):311�338, 2000.
[13] K. Deb and R.B Agrawal. Simulated binary crossover for continuos search space. ComplexSystems 9 (1995) 115-148, 1995.
109
110 Referencias
[14] K. Deb and A. Kumar. Real-coded genetic algorithms with simulated binary crossover:Studies on multimodal and multiobjective problems. Complex Systems, 9:431�454, 1995.
[15] A.E. Eiben and S.J. E. Introduction to Evolutionary Computing. SpringerVerlag, 2003.
[16] S.M. Elsayed, R.A Sarker, and D.L Essam. A comparative study of di�erent variants ofgenetic algorithms for constrained optimization. In Kalyanmoy Deb, Arnab Bhattacharya,Nirupam Chakraborti, Partha Chakroborty, Swagatam Das, Joydeep Dutta, SantoshK. Gup-ta, Ashu Jain, Varun Aggarwal, Jürgen Branke, SushilJ. Louis, and KayChen Tan, editors,Simulated Evolution and Learning, volume 6457 of Lecture Notes in Computer Science, pages177�186. Springer Berlin Heidelberg, 2010.
[17] S.M. Elsayed, R.A. Sarker, and D.L. Essam. The in�uence of the number of initial feasiblesolutions on the performance of an evolutionary optimization algorithm. Springer-VerlagBerlin Heidelberg 2012, SEAL 2012, LNCS 7673:1�11, 2012.
[18] L.J. Eshelman and J.D. Sha�er. Real-coded genetic algorithms and interval-shemata. InFoundation of Genetic Algorithms 2 (1993), pages 187�202, 1993.
[19] D.B. Fogel. An introduction to simulated evolutionary optimization. Neural Networks, IEEETransactions on, 5(1):3�14, 1994.
[20] L.J. Fogel. Intelligence Through Simulated Evolution: Forty Years of Evolutionary Program-ming. John Wiley & Sons, Inc., New York, NY, USA, 1999.
[21] M. Gen and R. Cheng. A survey of penalty techniques in genetic algorithms. In EvolutionaryComputation, 1996., Proceedings of IEEE International Conference on, pages 804�809, 1996.
[22] D. E. Goldberg. Genetic Algorithms in Search, Optimization and Machine Learning.Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA, 1st edition, 1989.
[23] D.E. Goldberg and K. Deb. A comparative analysis of selection schemes used in geneticalgorithms. In Foundations of Genetic Algorithms, pages 69�93. Morgan Kaufmann, 1991.
[24] F. Herrera, M. Lozano, and A. M. Sánchez. A taxonomy for the crossover operator forreal-coded genetic algorithms: An experimental study. International Journal of IntelligentSystems, 18(3):309�338, 2003.
[25] F. Herrera, M. Lozano, and J.L. Verdegay. Tackling real-coded genetic algorithms: Operatorsand tools for behavioural analysis. Artif. Intell. Rev., 12(4):265�319, August 1998.
[26] J.H. Holland. Outline for a logical theory of adaptive systems. J. ACM, 9(3):297�314, July1962.
[27] T. Jansen. Analyzing Evolutionary Algorithms, the Computer Scince Perspective. Springer,2013.
[28] J.B. Jenkins. Genetics. Houghton Mi�in, 1975.
[29] A. K. De Jong. An Analysis of the Behavior of a Class of Genetic Adaptative Systems. PhDthesis, University of Michigan, 1975.
[30] J. J. Liang, T. P. Runarsson, E. Mezura M., M. Clerc, P. N. Suganthan, and C. A. CoelloC.and K. Deb. Problem de�nitions and evaluation criteria for the cec 2006 special session onconstrained real-parameter optimization. Technical Report, September 18, 2006.
[31] E. Mezura M. and C.A. Coello C. Constraint-handling in nature-inspired numerical opti-mization: Past, present and future. Swarm and Evolutionary Computation, 1(4):173 � 194,2011.
[32] R. Mallipeddi and P.N. Suganthan. Problem de�nitions and evaluation criteria for the cec2010 competition on constrained real-parameter optimization. Technical Report, NanyangTechnological University, Singapore, April, 2010.

Referencias 111
[33] M. Mehra, M.L. Jayalal, A. J. Arul, S. Rajeswari, K. K. Kuriakose, and S.A.V. Satya M.Study on di�erent crossover mechanisms of genetic algorithm for test interval optimizationfor nuclear power plants,. I.J. Intelligent Systems and Applications,, 01:20�28, 2014.
[34] G. Mendel. Experiments in Plant-Hybridisation. Cambridge Harvard University press, 1925.
[35] Z. Michalewicz. Genetic algorithms, numerical optimization, and constraints. pages 151�158.Morgan Kaufmann, 1995.
[36] Z. Michalewicz. Genetic Algorithms + Data Structures = Evolution Programs (3rd Ed.).Springer-Verlag, London, UK, UK, 1996.
[37] Z. Michalewicz and Schoenauer M. Evolutionary algorithms for constrained parameter opti-mization problems. Evolutionary Computation 4 (1) (1996) 1 32, 1996.
[38] H. M.Voigt, H. Mühlenbein, and D. Cvetkovic. Fuzzy recombination for the breeder geneticalgorithm. Eshelman L, editor. Proc 6th Int Conf on Genetic Algorithms. San Mateo, CA:Morgan Kaufmann Publishers;, pages 104�111., 1995.
[39] N.J. Radcli�e. Genetic Neural Networks on MIMD Computers. PhD thesis, Dept. of Theo-rical Physics, University of Edinburgh, Edinburgh, UK, 1990.
[40] T.P. Runarsson and X. Yao. Search biases in constrained evolutionary optimization. IEEETransactions on Systems, Man, and Cybernetics Part C: Applications and Reviews, 35:233�243, 2005.
[41] J.J. Schneider and S. Kirkpatrick. Stochastic Optimization, Scienti�c Computation. Springer,April, 2006.
[42] H.P. Schwefel. Numerical Optimization of Computer Models. John Wiley & Sons, Inc., NewYork, NY, USA, 1981.
[43] S. N. Sivanadam and S. N. Deepa. Introduction to Genetic Algorithms. Springer- VerlagBerlin Heidelberg, 2008.
[44] T. Takahama, S. Sakai, and N. Iwane. Constrained optimization by the epsilon constrainedhybrid algorithm of particle swarm optimization and genetic algorithm. AI 2005: Advances inArti�cial Intelligence, in: Lecture Notes in Arti�cial Intelligence, Springer-Verlag, 3809:389�400, 2005.
[45] A. S. S. M. B. Ullah, E. Z. Elfeky, D. Cornforth, D. L. Essam, and R.Sarker. Improvedevolutionary algorithms for solving constrained optimization problems with tiny feasible spa-ce. IEEE International Conference on Systems, Man and Cybernetics (SMC 2008), pages1426�1433, 2008.
[46] A. S. S. M. B. Ullah, R. Sarker, and D. Cornforth. Search space reduction technique forconstrained optimization with tiny feasible space. GECCO 2008, July 12-16, 2008, Atlanta,Georgia, USA., pages 881�888, 2008.
[47] D. Whitley. An overview of evolutionary algorithms: Practical issues and common pitfalls.Information and Software Technology, 43:817�831, 2001.
[48] C. Zhi-Qiang and W. Rong-Long. Two e�cient real-coded genetic algorithms for real parame-ter optimization,. International Journal of Innovative Computing, Information and Control,7:4871�4883, 2011.