Unit Vi Pid Controller

of 25
-
Upload
dewi-anugrah-rizqi -
Category
Documents
-
view
283 -
download
0
Transcript of Unit Vi Pid Controller
-
7/24/2019 Unit Vi Pid Controller
1/25
UNIT VI PID CONTROLLER
Natalio Haryogi (13/344768/SV/3!86"
Tanggal Percobaan : 22 April 2015
Praktikum Teknik Kendali
Laboratorium Instrumentasi dan Kendali Diploma Teknik lektro !ekola"
#okasi
$ni%ersitas &ad'a" (ada
Abstrak
Sistem kontrol merupakan sebuah sistem yang meliputi pengontrolansuatu variabel-variabel seperti temperatur, tekanan, aliran, level, dan kecepatan.Dalam praktikum ini dilakukan pembuatan alat PID dengan sistem arduinodimana di dalam sistem arduino ada 2 model berupa analog dan digital, jenis
controller ada 3 yaitu proporsional, integral dan devirati, dalam hal ini supayaalat yang kita buat tersebut dapat berosilasi sehingga sistem PID sangatlahberpengaruh pada putaran motor.
!ontroler PID adalah kontroler yang sampai sekarang masih banyakdigunakan di dunia industri. "al yang krusial pada desain kontroler PID ini ialahmenentukan parameter kontroler atau tuning. Dari banyak metode tuning yangtelah dikembangkan saat ini, akan dibahas metode tuning Direct Synthesis. P#$
yang umumnya digunakan sebagai alat pengatur urutan bisa dimanaatkansebagai kontroler PID digital dengan memanaatkan modul %S$II &'mron( yang
bisa mengadaptasi pemrograman dalam bahasa )%SI$. Denganmengintegrasikan P#$ sebagai kontroler PID dan motor D$ sebagai plant,metode tuning Direct Synthesis dapat diimplementasikan. Dari hasil eksperimen,terbukti bah*a penggunaan kontroler PID dengan metode tuning Direct Synthesisuntuk pengaturan kecepatan motor D$ memberikan perbaikan kriteria
perormansi pada plant yang signiikan jika dibandingkan dengan plant tanpakontroler.
P#$%a&'l'a$
-
7/24/2019 Unit Vi Pid Controller
2/25
Pada praktikum ini di berikan kepada ma"asis)a supa*a mengerti apa*ang di maksud dengan PID+ karena sistem ini ban*ak sekali digunakan dalam
dunia industri se"ingga sistem ini "arus dipela'ari se"ingga pengertian PID
tersebut dapat dikembangkan baik sistem analog maupun sistem digital+ karena
dalam ken*ataann*a 'ika kita mendesain suatu sistem kontrol kita tidak perlu
menerapkan ketigan*a baik ,P+ I+ D- *ang penting respon alat tersebut ber.ungsi
dengan baik/
Kontroler PID adala" kontroler berumpanbalik *ang paling populer di
dunia industri/ !elama lebi" dari 50 ta"un+ kontroler PID terbukti dapat
memberikan per.orma kontrol *ang baik meski mempun*ai algoritma seder"ana
*ang muda" dipa"ami 1/ al krusial dalam desain kontroler PID iala" tuningatau pemberian parameter P+ I+ dan D agar didapatkan respon sistem *ang
diinginkan/ !ala" satu metode *ang muncul iala" tuningberdasar model plant+karena identi.ikasi plant bukan lagi "al *ang sulit untuk dilakukan/ !ala" satu
'enisn*a iala" Direct Synthesis *ang memerlukan model plant sebenarn*a danmodelplant *ang diinginkan untuk mendapatkan parameter P+ I+ D dari kontroler/2/ !ementara itu+ di dunia industri 'uga dikenal adan*a Programmable #ogic$ontroller ,PL3- sebagai alat pengatur urutan proses secara digital/ 4amunsekarang ini PL3 tela" dapat 'uga menangani proses analog/ PL3 3200
(64 mengadaptasi "al itu dengan munculn*a special unit seperti %nalog
Input +nit , %nalog 'utput+nit, PID $ontroller, %S$II +nit, dan lain lain7.Karena itu+ penulis akan mengimplementasikankontroler PID pada modul A!3IIuntukmengatur kecepatan motor D3/ !elain itu akandilakukan penerapan metodetuning Direct Synthesispada kontroler PID/ !ebagai catatan+tidak semua metodetuning cocok digunakan untuk 'enis8'enis plant tertentu/ (isaln*a:penggunaanmetode tuning 9iegler84ic"ols di Laboratorium !istem Pengaturan $nibra)untukpengaturan posisi motor D3 'ustru memberikan"asil *ang mengece)akansaat kontroler PIDditerapkan /
Daar T#ori
-
7/24/2019 Unit Vi Pid Controller
3/25
Luasn*a penggunaan kontrol PID pada dasarn*a dilatarbelakangi beberapa "al
diantaran*a:
Keseder"anaan struktur kontrol/ an*a mempun*ai 7 parameter utama
*ang perlu diatur ,tuning-/
kontrol PID memiliki se'ara" *ang pan'ang/ PID tela" digunakan 'au"
sebelum era digital berkembang ,1;70an-
Kontrol PID dalam ban*ak kasus tela" terbukti meng"asilkan un'uk ker'a
*ang relati. memuaskan baik digunakan sebagai sistem regulator maupun
sebagai sistem ser%o/
Pada a)aln*a kontrol PID umumn*a diimplementasikan dengan menggunakan
rangkaian elektronika analog/
-
7/24/2019 Unit Vi Pid Controller
4/25
gambar 1 diagram blok kontrol proporsional
)o$trol I$t#gral
Kontrol integral pada prinsipn*a bertu'uan untuk meng"ilangkan
kesala"an keadaan tunak ,o..set- *ang biasan*a di"asilkan ole" kontrol
proporsional/ ubungan antara output kontrol integral u,t- dengan sin*al error e,t-
terli"at pada persamaan 2/
Ki adalah konstanta integral. Diagram blok kontrol integral ditunjukkan
pada gambar 2.
gambar 2 diagram blok kontrol integral
)o$trol D#ri+ati, (t'r'$a$"
Kontrol deri%ati. dapat disebut pengendali la'u+ karena output kontroler
sebanding dengan la'u peruba"an sin*al error/ ubungan antara output kontrol
deri%ati. u,t- dengan sin*al error e,t- terli"at pada persamaan 7/
Blok kontrol derivatif ditunjukkan pada Gambar 3. Kontrol derivatif
tidak akan pernah digunakan sendirian, karena kontroler ini hanya
akan aktif pada periode peralihan. ada periode peralihan, kontrol
derivatif menyebabkan adanya redaman pada sistem sehingga lebih
memperke!il lonjakan. "eperti pada kontrol proporsional, kontrol
derivatif juga tidak dapat menghilangkan o#set.
-
7/24/2019 Unit Vi Pid Controller
5/25
gambar 3 diagram blok kontrol derivatif
Gabungan dari ketiga kontroler tersebut menjadi kontrol PID.
Diagram Blok dari kontrol $D ditunjukan pada gambar %.
"ehingga persamaan untuk kontrol $D adalah&
Atau
Dengan:
u,t- > sin*al output pengendali PID
Kp > konstanta proporsional
Ti > )aktu integral
Td > )aktu deri%ati.
Ki > konstanta integral ,Kp?Ti -
Kd > konstanta deri%ati. ,Kp/Td -
e,t- > sin*al error > re.erensi keluaran plant > set point nilai sensor
$ntuk persamaan PID no/ ,- merupakan PID bentuk independentdan persamaan
no/ ,5- merupakan PID bentuk dependent/ Istila" tersebut mengacu kepada
-
7/24/2019 Unit Vi Pid Controller
6/25
ketergantungan setiap suku persamaan ter"adap nilai Kp/ $ntuk persamaan no ,-+
'ika kita melakukan peru"an nilai pada konstanta proporsional ,Kp- maka tidak
akan mempengaru"i konstanta parameter lainn*a/ !edangkan untuk persamaanno/ ,5-+ dengan meruba" nilai Kp maka akan meruba" nilai dari parameter8
parameter lainn*a/ Disini sa*a akan menggunakan persamaan PID bentuk
independent/ @ika anda ingin menggunakan persamaan dependent+ maka andatinggal memasukan nilai dari Ki>KpTi dan Kd>Kp/Td
Pada persamaan8persamaan ,persamaan ,1- ,5-- diatas merupakan persamaan
dalam ka)asan )aktu continuous ,analog-/ !edangkan agar persamaan persamaan
tersebut dapat direalisasikan dalam bentuk pemrograman+ maka persamaan dalam
ka)asan )aktu continuous tersebut "arus didiskretisasi terlebi" da"ulu ,ka)asan
digital-/
-
7/24/2019 Unit Vi Pid Controller
7/25
)o$trol D#ri+ati,
@ika dari persamaan ,7- didiskretisai dengan menggunakan cara *ang samaseperti kontrol integral maka akan men'adi:
Tc> )aktu sampling atau )aktu cuplik &Sampling time(Agar lebi" mengerti dari persamaan diatas+ akan sa*a terangkan secara singkat
dan 'elas/
Derivati &de4dt( adalah suatu operator matemamis dalam ka*asan kontinyujika didiskretisasi maka akan menjadi limit, yang merupakan operator matematisdalam ka*asan diskret/ Dimana ungi dari operator limit adalah menguranginilai ke k dengan nilai ke k-1. )erdasarkan perhitungan diatas variabel error &e(
yang di derivatikan, atau dengan kata lain error yang sekarang dikurangi erroryang sebelumnya.
Baktu sampling adala" laman*a )aktu *ang digunakan untuk mencuplik atau
mensampling nilai dari sensor/ 4ilai dari sensor ini berguna untuk mendapatkan
sin*al error ,error,e->set point8nilai sensor-/ Dimana )aktu sampling ini sangat
berpengaru" pada kesensiti.an sistem *ang akan dikontrol/
-$alia Hail
-
7/24/2019 Unit Vi Pid Controller
8/25
1. )#$%ali otor Oilai
-0i )o$trol Daar (#to%a P#$gat'ra$"
-
7/24/2019 Unit Vi Pid Controller
9/25
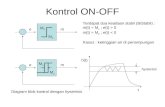
&ambar 2/1/ Kontroler beroperasi otomatis/
&ambar 2/2/ ,a- Diagram blok kontroler on8o..E ,b- diagram blok kontroler on8o..
dengan 'urang di.erensial
&ambar 2/2 ,a- dan ,b- menun'ukkan diagram blok kontroler dua posisi/
Daera" dengan sin*al pembangkit kesala"an *ang digerakkan sebelum ter'adi
s*itchingdisebut 'urang di.erensial/ @urang di.erensial ditun'ukkan pada &ambar
2/2 ,b-/ !uatu 'urang di.erensial men*ebabkan keluaran kontroler u,t- tetap pada
nilai a)al sampai sin*al pembangkit kesala"an tela" bergerak mendekati nilai nol/
Dalam beberapa kasus 'urang di.erensial ter'adi sebagai akibat adan*a peng"alang
*ang tidak dike"endaki dan gerakan *ang "ilang+ sering 'uga "al ini dimaksudkanuntuk mencega" operasi *ang berulang8ulang dan mekanisme on8o../
Tin'au sistem kontrol tingkat cairan pada &ambar 2/7 ,a- dengan katup
elektromagnet seperti pada &ambar 2/7 ,b- digunakan untuk mengontrol la'u
aliran masuk/ Katup ini bisa dalam posisi terbuka atau tertutup/ Dengan sistem
kontrol dua posisi ini+ la'u aliran masuk dapat positi.+ tetap+ atau nol/
-
7/24/2019 Unit Vi Pid Controller
10/25
&ambar 2/7/ ,a- sistem tingkat cairan+ ,b- katup
elektromagnet
!eperti pada &ambar 2/+ sin*al keluaran secara terus8menerus bergerak
antara dua batas *ang diperlukan untuk membuat elemen pembangkit bergerak
dari satu posisi ke posisi lainn*a/ Per"atikan ba")a kur%a keluaran berikut
mengikuti satu dan dua kur%a eksponensial+ satu ber"ubungan dengan kur%a
pengisian dan satu kur%a pengosongan/ silasi keluaran antara dua batas
merupakan karakteristik tanggapan k"usus dari sistem kontrol dua posisi/
&ambar 2// Kur%a tinggi ",t- %ersus t untuk sistem pada &ambar
F,a-/
Dari &ambar 2/+ diketa"ui ba")a amplitudo osilasi keluaran dapat direduksi
dengan mengurangi 'urang di.erensial/ Pengurangan 'urang di.erensial menamba"
nilai peng"ubung on8o.. per menit dan mengurangi )aktu "idup komponen/
-
7/24/2019 Unit Vi Pid Controller
11/25
!.!.!. )o$trol Pro*orio$al (P"
$ntuk kontroler dengan aksi kontrol proporsional+ "ubungan antara
masukan kontroler u,t- dan sin*al pembangkit kesala"an e,t- adala"
u,t- > Kpe,t-
atau dalam besaran trans.ormasi Laplace
-,
-,
s5
s+
> Kp
dengan Kpadala" suku penguatan proporsional/
&ambar 2/5/ Diagram blok kontroller proporsional
Peningkatan K akan menaikkan penguatan loop dari sistem dan dapat digunakan
untuk menaikkan kecepatan respon sistem dan mengurangi magnitude kesala"an8
kesala"an keadaan mantap ,error steady-state-/ @ikalau kontrol proporsional
berdiri sendiri biasan*a kurang baik+ sebab kenaikan K tidak "an*a membuat
sistem lebi" sensiti. tetapi 'uga cenderung tidak menstabilkan sistem/
Konsek)ensin*a nilai K *ang mana dapat dinaikkan adala" terbatas+ dan
keterbatasan ini bole" 'adi tidak cukup tinggi untuk mencapai rensponse *ang
diinginkan/ Akibatn*a pada saat dicoba untuk menset penguatan K+ maka terdapatkon.lik kebutu"ankeinginan/ Disatu sisi diinginkan untuk mengurangi kesala"an8
kesala"an ,errors- seban*ak mungkin+ tetapi untuk melakukan ini men*ebabkan
response berisolasi+ dengan cara demikian memperpan'ang setting )aktu/
!ebalikn*a peruba"an respon dari input sebaikn*a secepat mungkin/ 6espon *ang
cepat dapat dicapai dengan menaikkan K+ tetapi sekali lagi dapat men*ebabkan
ketidak stabilan sistem/
-
7/24/2019 Unit Vi Pid Controller
12/25
!.!.3. )o$trol I$t#gral (I"
Tu'uan utama kontroller integral *aitu untuk meng"ilangkan error pada
keadaan mantap ,steady-/ Pada kontroler dengan aksi kontrol integral nilai
masukan kontroler u,t- diuba" pada la'u proporsional dan sin*al pembangkit
kesala"an e,t-/ !e"ingga
atau
&ambar 2/G/ Diagam blok kontroller integral
dengan Kiadala" konstanta *ang dapat diuba"/
'ungsi alih dari kontroler integral adalah
(ika nilai e)t* ada dua )doubel*, maka nilai u)t* bervariasi dua kali
se!ara !epat. +ntuk pembangkit kesalahan nol, nilai u)t* tetap konstan.
ksi kontrol integral biasanya disebut kontrol reset.
2.2.4. Kontrol Proporsional ditambah Integral (PI)
-
7/24/2019 Unit Vi Pid Controller
13/25
ksi kontrol kontroler proporsional ditambah integral
dide-nisikan dengan persamaan berikut &
atau fungsi alihnya sebagai berikut&
dengan K penguatan proporsional dan i disebut /aktu integral.
Keduanya K dan idapat ditentukan. 0aktu integral mengatur aksi
kontrol internal, sedang perubahan nilai Kberakibat pada bagian aksi
kontrol proporsional maupun integral. Kebalikan /aktu integral disebut
laju riset. aju riset adalah bilangan yang menunjukan berapa kali tiap
menit bagian proporsional dari aksi kontrol diduplikasi. aju reset
diukur dalam pengulangan per menit. Gambar 2. )a* menunjukkan
diagram blok kontroler proporsional ditambah integral. (ika sinyalpembangkit kesalahan e)t* adalah fungsi langkahunit seperti
ditunjukkan pada Gambar 2. )b*, maka keluaran kontroler seperti
pada Gambar 2. )!*.
Gambar 2.. )a* Diagram blok kontroler proporsional ditambah integral4 )b*
dan )!* diagram masukan langkahunit dan keluaran kontroler.
2.2.5. Kontrol Turunan (Derivative) (D)
ksi derivative atau laju kontrol digunakan pada kontroller untuk
memper!epat respon transient dari sistem kontrol. ksi derivative
-
7/24/2019 Unit Vi Pid Controller
14/25
selalu disertai dengan kontrol proporsional. danya aksi derivative
pada suatu kontroller mempunyai efek penstabil phaselead terhadap
penguatan loop kontrol.
2.2.6. Kontrol Proporsional ditambah Turunan(PD)
ksi kontrol proporsional ditambah turunan dide-nisikan dengan
persamaan berikut.
dan fungsi alihnya adalah&
dengan K adalah penguatan proporsional dan d konstanta yang
disebut /aktu turunan. K dan d keduanya dapat ditentukan. ksi
kontrol turunan kadang kadang disebut laju kontrol dengan besaran
keluaran kontroler proporsional ke laju perubahan sinyal pembangkit
kesalahan. 0aktu turunan d adalah /aktu interval dengan laju aksi
memberikan pengaruh pada aksi kontrol proporsional.
Gambar 2.5. )a* Diagram blok kontroler proporsional ditambah turunan& )b*
dan )!* diagram yang menggambarkan unit masukan fungsi $andai dan
keluarannya
Gambar 2.5 )a* menunjukkan diagram blok kontroler proporsional
ditambah turunan. (ika sinyal pembangkit kesalahan e)t* unit fungsi
-
7/24/2019 Unit Vi Pid Controller
15/25
landai seperti ditunjukkan pada Gambar 2.5 )b*, maka keluaran
kontroler menjadi seperti pada Gambar 2.5 )!*. "eperti dapat dilihat
pada Gambar 2.5 )!*, aksi kontrol turunan mempunyai karakter
antisipasi. 6amun demikian, aksi kontrol turunan tidak dapat
mengantisipasi aksi lain yang belum pernah dilakukan.
"atu pihak aksi kontrol mempunyai keuntungan mengantisipasi, tapi di
pihak lain juga mempunyai kelemahan yaitu adanya gangguan sinyal
penguatan yang dapat ber!ampur pada pembangkit )aktuator*.
erhatikan bah/a aksi kontrol turunan tidak pernah digunakan sendiri
karena aksi kontrol ini hanya efektif selama periode transient.
2.2.7. Kontrol Proporsonal ditambah Integral ditambah
Turunan (PID)
Kombinasi dari aksi kontrol proporsional, aksi kontrol integral,
dan aksi kontrol turunan disebut aksi kontrol proporsional ditambah
integral ditambah turunan. Kombinasi ini mempunyai keuntungan
dibanding masingmasing kontroler. ersamaan dengan tiga kombinasi
ini diberikan oleh &
atau fungsi alihnya
dengan K penguatan proporsional, i /aktu integral, dan d /aktu
turunan.
al *ang perlu diper"atikan saat mendesain PID 3ontroller pada suatu sistem ada
beberapa langka" *ang digunakan untuk mendapatkan respon *ang diinginkan
*aitu :
http://var/www/apps/conversion/tmp/scratch_1/bab2.2.ppthttp://var/www/apps/conversion/tmp/scratch_1/bab2.2.ppt -
7/24/2019 Unit Vi Pid Controller
16/25
A/ (endapatkan respon loop terbuka dan tentukan apa sa'a *ang ingin
ditingkatkan
-
7/24/2019 Unit Vi Pid Controller
17/25
ungsi dari tiap komponen tersebut :
6esistor
-
7/24/2019 Unit Vi Pid Controller
18/25
Catatan : Jika salah satu IC OP07CP mengalami short maka motor tidak
akan berosilasi tetapi memutar satu putaran penuh hal ini di
karenakan tidak ada feedback pada rangkaian tersebut sehingga
dibutuhkan IC yang kondisinya bagus -1 pada masukan motor haruslah di sambung dengan !CC
sehingga motor "uga mendapatkan masukan supply supaya motor
dapat berosilasi Inputan dan outputan "angan sampai terbalik karena bisa
menimbulkan short pada rangkaian
#ripod harus di putar putar untuk mendapatkan osilasi yang halus
6angkaian *ang suda" 'adi :
2. Pengendalian motor dengan digital
$ntuk mengendalikan motor dengan sistem digital maka dibutu"kan ba"n
berupa :
Arduino
L3D
Program pengendalian motor osilasi
-
7/24/2019 Unit Vi Pid Controller
19/25
Program *ang di gunakan untuk mengendalikan supa*a motor dapat berosilasisecara digital adala" seperti diba)a" ini :
Jinclude Liuid3r*stal/"C
Liuid3r*stal lcd,2+7++5+G+H-E
unsigned int ep+edE
int
kec>1F0+nilaierror+nilaierrorI+nilaierrorD
+sblmerrorI>0+sblmerrorD>0+mak!peed>255+nilaipidE
int s+p+sp+p%E
int kp>2+kd>1E
.loat ki>0E
%oid setup,- M
!erial/begin,;G00-E
pin(ode,;+$TP$T-E
pin(ode,10+$TP$T-E
pin(ode,11+$TP$T-E
pin(ode,A5+I4P$T-E
pin(ode,A+I4P$T-E
pin(ode,A7+I4P$T-E
pin(ode,A1+I4P$T-E
pin(ode,A0+I4P$T-E
lcd/begin,1G+2-E
lcd/clear,-E
N
%oid loop,- M
pid,-E
s >analog6ead,A0-E
sp>map,s+0+1027+0+255/0-E
lcd/set3ursor,0+0-E
lcd/print,O!:O-E
lcd/print,sp-E
int " >analog6ead,A1-E
p%>map,"+0+1027+0+255/0-E
lcd/set3ursor,5+0-E
lcd/print,OP:O-E
lcd/print,p%-E
int error>sp8p%E
lcd/set3ursor,10+0-E
lcd/print,Oe:O-E
lcd/print,error-E
lcd/set3ursor,0+1-E
lcd/print,OP:O-E
lcd/print,kp-E
lcd/set3ursor,5+1-E
lcd/print,OI:O-E
lcd/print,ki-Elcd/set3ursor,11+1-E
lcd/print,OD:O-E
lcd/print,kd-E
dela*,100-E
N
%oid putarKanan,int kanan-M
digitalBrite,11+I&-E
-
7/24/2019 Unit Vi Pid Controller
20/25
digitalBrite,;+LB-E
analogBrite,10+kanan-E
N
%oid putarKiri,int kiri-M
digitalBrite,11+LB-E
digitalBrite,;+I&-E
analogBrite,10+kiri-E
N
%oid pid,-M sp>analog6ead,A0-E
p%>analog6ead,A1-E
nilaierror>sp8p%E
nilaierrorI>nilaierrorsblmerrorIE
nilaierrorD>nilaierror8sblmerrorDE
nilaipid>,int-,kec,kpQnilaierror-
,kdQnilaierrorD-,kiQnilaierrorI--E
sblmerrorI>nilaierrorIE
sblmerrorD>nilaierrorDE
putaran motor
nilaipid>min,nilaipid+mak!peed-E
nilaipid>maR,nilaipid+,8mak!peed--E
i.,nilaipid C> sp-M
putarKanan,nilaipid-E
N
else i. ,nilaipid > sp-M
putarKiri,nilaipid-E
N
N
-
7/24/2019 Unit Vi Pid Controller
21/25
)#i*'la$
Luasn*a penggunaan kontrol PID pada dasarn*a dilatarbelakangi beberapa "al
diantaran*a:
1/ Keseder"anaan struktur kontrol/ an*a mempun*ai 7 parameter utama
*ang perlu diatur ,tuning-/
2/ kontrol PID memiliki se'ara" *ang pan'ang/ PID tela" digunakan 'au"
sebelum era digital berkembang ,1;70an-
7/ Kontrol PID dalam ban*ak kasus tela" terbukti meng"asilkan un'uk ker'a
*ang relati. memuaskan baik digunakan sebagai sistem regulator maupun
sebagai sistem ser%o/
-
7/24/2019 Unit Vi Pid Controller
22/25
Ada 7 'enis controller serta karakteristikn*a :
)o$trol Pro*orio$al
kontrol proporsional ber.ungsi untuk memperkuat sin*al kesala"an
penggerak ,sin*al error-+ se"ingga akan mempercepat keluaran sistem mencapai
titik re.erensi/ ubungan antara input kontroler u,t- dengan sin*al error e,t-
terli"at pada persamaan 1/
Kp adalah konstanta proporsional. Diagram blok kontrol proporsional
ditunjukkan pada gambar 1.
gambar 1 diagram blok kontrol proporsional
)o$trol I$t#gral
Kontrol integral pada prinsipn*a bertu'uan untuk meng"ilangkan
kesala"an keadaan tunak ,o..set- *ang biasan*a di"asilkan ole" kontrolproporsional/ ubungan antara output kontrol integral u,t- dengan sin*al error e,t-
terli"at pada persamaan 2/
Ki adalah konstanta integral. Diagram blok kontrol integral ditunjukkan
pada gambar 2.
gambar 2 diagram blok kontrol integral
)o$trol D#ri+ati, (t'r'$a$"
Kontrol deri%ati. dapat disebut pengendali la'u+ karena output kontroler
sebanding dengan la'u peruba"an sin*al error/ ubungan antara output kontrol
deri%ati. u,t- dengan sin*al error e,t- terli"at pada persamaan 7/
-
7/24/2019 Unit Vi Pid Controller
23/25
Blok kontrol derivatif ditunjukkan pada Gambar 3. Kontrol derivatif
tidak akan pernah digunakan sendirian, karena kontroler ini hanya
akan aktif pada periode peralihan. ada periode peralihan, kontrol
derivatif menyebabkan adanya redaman pada sistem sehingga lebih
memperke!il lonjakan. "eperti pada kontrol proporsional, kontrol
derivatif juga tidak dapat menghilangkan o#set.
gambar 3 diagram blok kontrol derivatif
Gabungan dari ketiga kontroler tersebut menjadi kontrol PID.
Diagram Blok dari kontrol $D ditunjukan pada gambar %.
"ehingga persamaan untuk kontrol $D adalah&
Atau
al *ang perlu diper"atikan saat mendesain PID 3ontroller pada suatu sistem ada
beberapa langka" *ang digunakan untuk mendapatkan respon *ang diinginkan*aitu :
A/ (endapatkan respon loop terbuka dan tentukan apa sa'a *ang ingin
ditingkatkan
-
7/24/2019 Unit Vi Pid Controller
24/25
al *ang perlu di per"atikan pada sistem kendali PID analog : Jika salah satu IC OP07CP mengalami short maka motor tidak
akan berosilasi tetapi memutar satu putaran penuh hal ini di
karenakan tidak ada feedback pada rangkaian tersebut sehingga
dibutuhkan IC yang kondisinya bagus -1 pada masukan motor haruslah di sambung dengan !CC
sehingga motor "uga mendapatkan masukan supply supaya motor
dapat berosilasi Inputan dan outputan "angan sampai terbalik karena bisa
menimbulkan short pada rangkaian
#ripod harus di putar putar untuk mendapatkan osilasi yang halus
Da,tar P'ta0a
1 Billis+ (/ @/+ 1;;;/ Proportional8Integral8
Deri%ati%e 3ontrol+ $6L:"ttp:lorien/ncl/
ac/uk mingpidpid/pd.C/
2 gunnaike+
-
7/24/2019 Unit Vi Pid Controller
25/25
3"airuaini dkk/+ 1;;F/ (etode 9iegler8
4ic"ols pada !istem Kontrol 4ic"ols padaPerancangan Kontroler PID+ $6L:"ttp:
)))/elektroindonesia/comelektrotutor12/
"tmlC/
5 S/S/+ 1;;2/ 32008A!302 A!3II $nit+
(64/
G