Tugino ST MT [email protected] Jurusan Teknik Elektro...
14
1 Tugino ST MT [email protected] Jurusan Teknik Elektro STTNAS Yogyakarta Bagian-bagian robot Tugino, ST MT STTNAS Yogyakarta 2
Transcript of Tugino ST MT [email protected] Jurusan Teknik Elektro...

1
Tugino ST [email protected]
Jurusan Teknik ElektroSTTNAS Yogyakarta
Bagian-bagian robot
Tugino, ST MT STTNAS Yogyakarta 2

2
Bagian-bagian robot
Tugino, ST MT STTNAS Yogyakarta 3
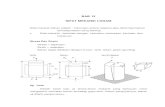
Manipulator
• suatu struktur mekanik yang terdiri atas b b b d k k (li k)beberapa badan yang kaku (link), yang dihubungkan dengan sendi (joint). Manipulator terdiri atas lengan (arm) yang melakukan gerakan, pergelangan (wrist) yang memberikan kecekatan serta end
Tugino, ST MT STTNAS Yogyakarta 4
effector yang melakukan tugas yang diinginkan, seperti misalnya grip.

3
Types of industrial robots• Serial manipulator
• Parallel configuration
Tugino, ST MT STTNAS Yogyakarta 5
g
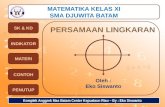
Manipulator Kartesian
• Cartesian robot– Lengan robot bergerak linier dalam 3 sumbu
axis. x,y,z z
Tugino, ST MT STTNAS Yogyakarta 6
xy

4
Klasifikasi Robot Menurut Konstruksi Mekanik
• Manipulator Kartesian
Tugino, ST MT STTNAS Yogyakarta 7
Further Classification of Serial Manipulator
• Cartesian Robot
Tugino, ST MT STTNAS Yogyakarta 8
• Gantry Robot

5
• Robot koordinat silindris – Lengan berputar pada basis , bergerak
masuk keluar dan naik turun
Manipulator Silindris
Tugino, ST MT STTNAS Yogyakarta 9
Manipulator Silindris
Tugino, ST MT STTNAS Yogyakarta 10

6
• Cylindrical Robot
Tugino, ST MT STTNAS Yogyakarta 11
Manipulator Speris
Tugino, ST MT STTNAS Yogyakarta 12

7
Further Classification of Serial Manipulator
• Spherical Robots
• Articulated Robots
Tugino, ST MT STTNAS Yogyakarta 13
Manipulator Revolute
Tugino, ST MT STTNAS Yogyakarta 14

8
• Contoh robot SCARA Berputar pada 2
Manipulator Revolute
– Berputar pada 2 sumbu axis dan bergerak linier naik turun
Tugino, ST MT STTNAS Yogyakarta 15
• SCARA
Tugino, ST MT STTNAS Yogyakarta 16

9
Manipulator Angular
Tugino, ST MT STTNAS Yogyakarta 17
• Titik sumbu lengan robot bergerak
Manipulator Angular
robot bergerak berputar dan dalam 3 sumbu koordinat axis
Tugino, ST MT STTNAS Yogyakarta 18

10
Tugino, ST MT STTNAS Yogyakarta 19
Tipe join Robot
• Speris/Bola join • Revolute/berputar• Prismatik/sliding• Flat/datar• Helikal/sekrup
Tugino, ST MT STTNAS Yogyakarta 20

11
Tugino, ST MT STTNAS Yogyakarta 21
Robot Working Envelope
Tugino, ST MT STTNAS Yogyakarta 22

12
Robot classification using control methods
• Point-to-Point control• Continuous path control
Tugino, ST MT STTNAS Yogyakarta 23
AktuatorAktuator : pemacu gerak yang dihubungkan ke
sendi (joint) dari lengan robot jenis tenaganyasendi (joint) dari lengan robot. jenis tenaganya, • Aktuator tenaga elektris, biasanya digunakan
motor arus searah. sifat mudah diatur dengan torsi kecil sampai sedang.
• Aktuator tenaga hidrolik. torsi yang besar konstruksinya sukar
Tugino, ST MT STTNAS Yogyakarta 24
konstruksinya sukar.• Aktuator tenaga pneumatik. sukar dikendalikan

13
Sensor
• sensor internal (pendeteksian variabel-i b l t t t i lvariabel tertentu, misalnya yang
berhubungan dengan pengontrolan lengan robot ) dan sensor eksternal (perubahan variabel-variabel dari lingkungan sekitar. Misalnya sensor posisi, sensor kecepatan,
Tugino, ST MT STTNAS Yogyakarta 25
sensor sentuhan).
Sistem kontrol
• Sistem kontrol ini berhubungan dengan k t d l t l dkomputer dalam mengontrol dan mengawasi gerak lengan robot.
Tugino, ST MT STTNAS Yogyakarta 26

14
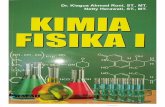
Kontrol sistem Robot
Environmentalsensors
Motion planner Controller
MechanicalStructure
Configuration sensor
Tugino, ST MT STTNAS Yogyakarta 27
Tugino, ST MT STTNAS Yogyakarta 28