Teknik Pengaturan Metode Root Locus
52
M M E E TODE TEMPAT KEDUDUKAN AKAR TODE TEMPAT KEDUDUKAN AKAR (ROOT LOCUS) (ROOT LOCUS)
-
Upload
manuel-clark -
Category
Documents
-
view
155 -
download
32
description
Teknik Pengaturan - Teknik Mesin Teknik Industri
Transcript of Teknik Pengaturan Metode Root Locus

MMEETODE TEMPAT KEDUDUKAN AKAR (ROOT TODE TEMPAT KEDUDUKAN AKAR (ROOT LOCUS)LOCUS)

Teknik untuk Menganalisis StabilitasTeknik untuk Menganalisis Stabilitas
• Kriteria Aljabar (stabilitas mutlak)
• Grafik
Tempat-KedudukanAkan-akar(root locus)
RouthHurwitz
Evans
Bode
Nyquist
Black
Fractions

PENDAHULUAN
• Karakteristik dasar tanggap transien sistem loop tertutup ditentukan oleh kutub-kutub loop tertutup.
• Kutub-kutub loop tertutup pada bidang s adalah akar-akar persamaan karakteristik.
• Untuk mencarinya kita perlu menguraikan polinomial karakteristik atas faktor-faktornya, yang umumnya sulit apabila derajat polinomialnya lebih tinggi dari dua.
• Metode tempat kedudukan akar merupakan metode yang menggambarkan akar-akar persamaan karakteristik untuk semua harga dari suatu parameter sistem.
• Akar-akar untuk suatu harga tertentu dari parameter terletak pada grafik yang diperoleh.

(a) Sistem Loop Tertutup. (b) Fungsi Alih Ekuivalen

ROOT LOCUS
• Persamaan karakteristik Loop-Tertutup: 1 + KG(s)H(s) = 0
• Penguatan K = parameter rancanganG(s)H(s) = penguatan loop
p
z
n
jj
n
ii
)ps(
)zs(
)s(H)s(G
1
1
dengan:zi , i = 1, 2, …, nz adalah nol-nol sistem loop terbuka
pj , j = 1, 2, …, np adalah kutub-kutub sistem loop terbuka

p
z
n
jj
n
ii
)ps(
)zs(
)s(H)s(G
1
1
pn
jjps
1
n
1ii )()z(s
kutubsudut sudut nolsudut sudut
z

DIAGRAM TEMPAT KEDUDUKAN AKAR-AKAR
• Menentukan kedudukan akar kutub-kutub loop tertutup (root loci) ketika K berubah antara o sampai .
• Dari persamaan: 1 + KG(s)H(s)Karena G(s)H(s) adalah besaran kompleks, maka dapat dipisahkan menjadi dua persamaan karakteristik:
1. Syarat sudut:
0,1,2,...k )k()s(H)s(G 12180
2. Syarat besar: 1)s(H)s(G

METODE TEMPAT KEDUDUKAN AKAR
• Metode ini memberikan prosedur grafis yang efektif untuk mencari akar-akar polinomial dalam studi sistem fisik.
• Gagasan dasar adalah harga s yang membuat fungsi alih loop terbuka sama dengan -1 harus memenuhi persamaan karakteristik sistem.
• Jika penguatan diubah dari nol sampai tak terhingga, memungkinkan kita untuk mencari kutub-kutub loop tertutup dan kutub dan nol loop terbuka dengan penguatan sebagai parameter.
• Dalam merancang sistem kendali linier, metode tempat kedudukan akar terbukti cukup berguna untuk memodifikasi kutub dan nol loop terbuka sehingga tanggap memenuhi spesifikasi kinerja sistem.

180
)ps)(ps()zs(K
)s(H)s(KG
321
21
1
s-plane
s1
1 3
2
p1p2
z1
s1-p1s1-z1

Contoh:Contoh:

SISTEM ORDE KEDUA SEDERHANA
• Fungsi alih loop terbuka sistem adalah:
)s(sK
)s(H)s(G1
Fungsi alih loop tertutupnya adalah:
Kss
K)s(R)s(C
2
+-
R(s) C(s))s(s
K1

Persamaan karakteristik sistem ini adalah:
02 Kss
Kita akan mencari tempat kedudukan akar-akar persamaan ini jika K diubah dari nol sampai tak terhingga.
Ks , Ks 2 414121
21
21
21
1
• K=0 adalah sama dengan kutub-kutub dari G(s)H(s).• Jika K diperbesar dari nol sampai ¼, maka kutub-kutub loop
tertutup bergerak menuju titik (-½, 0).• Untuk harga K dari nol sampai ¼, semua kutub loop tertutup
terletak pada sumbu nyata (tanggap impulse tidak berosilasi).• Pada K= ¼, kedua kutub loop tertutup nyata tersebut bersatu
(sistem redaman kritis)


• Jika K > ¼ , maka kutub-kutub loop tertutup bergerak meninggalkan sumbu nyata, menjadi kompleks.
• Karena bagian nyata konstan, maka kutub-kutub loop tertutup bergerak sepanjang garis s = -½ (sistem redaman kurang).
Syarat sudut:
0,1,2,...k )k(ss)s(s
K
121801
1

Tinjau titik P, besaran kompleks s dan s+1 , masing-masing mempunyai sudut 1 dan 2 ,dan besar masing-masing adalah |s| dan |s+1|. Jumlah sudut 1 dan 2 adalah 180°.
Jika titik P terletak pada sumbu nyata antara 0 dan -1, maka 1 = 180° dan 2 = 0°.
Jika titik P bukan merupakan titik-titik pada tempat kedudukan akar, maka jumlah antara 1 dan 2 tidak sama dengan 180°(2k+1).
Jadi titik-titik yang tidak terletak pada tempat kedudukan akar, tidak memenuhi syarat sudut (bukan merupakan kutub loop tertutup untuk setiap harga K).

Jika kutub-kutub loop tertutup ditentukan dari tempat kedudukan akar, maka harga K yang berkaitan ditentukan dengan syarat besar.
Jika loop tertutup yang dipilih adalah s= - ½ + j2 , maka harga K untuk kondisi ini diperoleh dari:
11 2
21
js)s(s
K)s(H)s(G
atau4
171
221 js
)s(sK
Karena kutub-kutub saling berpasangan (konjugasi komplk), jika salah satu diantaranya diperoleh, misal s= - ½ + j2 maka yang lain dapat diperoleh secara otomatis.

Perubahan K pada perilaku tanggap transien sistem orde dua:
• Kenaikan harga K akan memperkecil rasio redaman , sehingga memperbesar overshoot dari tanggap.
• Kenaikan K juga memperbesar frekuensi alamiah.• Kutub-kutub loop tertutup selalu disebelah kiri
sumbu khayal bidang- s, jadi sampai berapapun K diperbesar, sistem selalu stabil.


Tempat Kedudukan Penguatan Konstan
• Tempat kedudukan penguatan konstan dari sistem diperoleh dari syarat besar
+-
R(s) C(s))s(s
K1
11
)s(s
K)s(H)s(G
atauK)s(s 1
Titik-titik pada bidang kompleks yang memenuhi persamaan diatas untuk suatu harga K tertentu membentuk suatu tempat kedudukan penguatan konstan.

• Diagram tempat kedudukan dari: |G(s)H(s)| = konstan adalah berupa lingkaran dengan pusat di titik asal.
• Tempat kedudukan untuk: G(s)H(s) = 180°(2k + 1) berada pada sumbu nyata negatif dari bidang G(s)H(s)
• Tempat kedudukan akar dan tempat kedudukan penguatan konstan pada bidang s adalah pemetaan konformal dari tempat kedudukan G(s)H(s) = 180°(2k + 1) dan |G(s)H(s)| = konstan pada bidang G(s)H(s).

SOAL 1
• Gambarkan diagram tempat kedudukan akar dan tempat kedudukan penguatan konstan untuk sistem berikut:
1H(s) , ss
)s(K)s(G
32
22
Jawab:Karena konfigurasi kutub-nol adalah simetri terhadap sumbu nyata, maka tempat kedudukan penguatan konstan juga simetri terhadap sumbu nyata.

SOAL 2
• Gambarkan diagram tempat kedudukan akar dan tempat kedudukan penguatan konstan untuk sistem berikut:
1H(s) , sss
K)s(G
23 23
Jawab:Karena konfigurasi kutub pada bidang s adalah simetri terhadap sumbu nyata dan garis yang sejajar sumbu khayal yang melalui titik (=-1, =0), maka tempat kedudukan penguatan konstan juga simetri terhadap garis =0 (sumbu nyata) dan garis =-1.

Analisis Sistem dengan Root Locus
1. Pertama, carilah persamaan karakteristiknya- Syarat besar menjadi:
+-
R(s) C(s)
sss
K
23 23
1802121
sss)s)(s(s
K)s(G
- Syarat sudut untuk sistem diatas adalah:
121
)s)(s(s
K)s(G

2. Tentukan asimtot tempat kedudukan akarAsimtot adalah tempat kedudukan akar jika K mendekati tak terhingga
321 s
Klim
)s)(s(sK
lim)s(Glimsss
Sehingga syarat sudut menjadi:
)k(s 121803
atau:
)k()k(
asimtot Sudut 12603
12180
Karena sudut berulang jika k diubah, maka ada tiga asimtot 60°, -60° dan 180° (sumbu nyata negatif).

3. Tentukan titik potong tempat kedudukan akar dengan sumbu khayal.
Titik-titik ini dapat diperoleh dari kriteria kestabilan Routh dari persamaan karakteristik sistem: s3+3s2+2s +K = 0
Ks
Ks
Ks
s
0
2
3
3
63
21
Harga K yang membuat koefisien s1 pada kolom pertama sama dengan nol adalah K = 6.
Titik potong pada sumbu khayal diperoleh dengan menggunakan persamaan dari baris s2, yaitu:

0633 22 sKs
yang menghasilkan: 2js Jadi tempat kedudukan akar memotong sumbu khayal di: 2Hingga penguatan pada titik potong ini adalah K = 6.

Diagram tempat kedudukan akar-akar

Contoh Aplikasi Metode Root LocusContoh Aplikasi Metode Root Locus

Aturan Penggambaran Root Locus
• Pada real axis tempat kedudukan berada pada titik di mana pole dikurangi zero berharga ganjil untuk sebelah kanan titik.
• Loci akar selalu berasal, untuk total gain lup = 0, pada pole OLTF.
• Jumlah loci atau cabang sama dengan jumlah pole OLTF (n).
• Semakin naik total gain lup, loci atau cabang akan mendekati zero OLTF atau . Jumlah loci menuju = n – m.
29

Aturan Penggambaran Root Locus (2)
• Loci yang menuju sepanjang garis asimtot. Semua garis asimtot harus melewati center of gravity (CG) dari pole dan zero OLTF.
• Asimtot membuat sudut dengan sumbu real:dengan k = 0, 1, …, n-m-1
• Titik-titik pada sumbu real di mana loci bertemu atau meninggalkan, atau masuk dari daerah kompleks pada bidang s, disebut breakaway point.
30
mn
zp
CG
n
j
m
iij
1 1
mn
k
)360(180 00
n
j j
m
i i pszs 11
11

Contoh 4
• Persamaan karakteristik:
• pole: -1/10, -1/30, dan –1/3 n = 3• zero: tidak ada m = 0
31
Kc
R(s)
C(s)Kc
Toset(s
)
E(s)
M(s)
F(s)
13
016.0
s 130
50
s
110
1
s
31
301
101
'
sss
KOLTF
0)13)(130)(110(
8,01
sss
Kc

Jawaban (1)
32
cc K
KK 000888,0
)3)(30)(10(
8,0'
155,003
31
301
101
CG
000
000000
300 ,180 ,60
3
)2(360180 ,
3
)1(360180 ,
3
)0(360180
0111
31
101
301
sss
Breakaway point:

Jawaban (2)
• Dengan menyamakan penyebut pers. kuadrat– s = -0,247 (tidak mungkin, karena tidak di antara
dua titik) dan – s = -0.063 (valid)– u = 0,22
– Kcu = 24
33

Gambar RL
34

Root Contour• Root Loci (RL)
– Bagian tempat kedudukan akar ketika Kc bervariasi dari 0 hingga ∞ (Kc positif)
• Complementary Root Loci (CRL)– Bagian tempat kedudukan akar ketika Kc bervariasi dari -∞
hingga 0 (Kc negatif)• Root Contours (RC)
– Tempat kedudukan akar ketika bervariasi lebih dari satu parameter
• Complete Root Loci– Kombinasi RL dan CRL (-∞<Kc< ∞)
35

Kondisi RL
• Besaran
• Sudut
01 :PK
01 :PK
1
OLTF
sHsG
sHsG
sG
sR
sC
cc
KK
OLTF - 1
36
o
o
180atau radian dari genapkelipatan
0 2
180atau radian dari ganjilkelipatan
0 12
c
c
KkOLTF
KkOLTF

Perhitungan K
m
ii
n
ji
n
jj
m
ii
zs
ps
c
n
jj
m
ii
n
jj
m
ii
ccps
zs
n
m
K
mnk
kpszsOLTFCRL
kpszsOLTFRL
KK
OLTF
pspsps
zszszsKOLTF
1
1
1
1
1 ,....,2 ,1 ,0
2 :
12 :
1
...
...
11
11
21
21
37

Contoh
21
1
pspss
zsKOLTF c
A
BCD
zs
pspssKc
11
21111
38

Sifat dan Pembuatan RL
1. Titik Kc = 02. Titik Kc = ±∞3. Jumlah cabang4. Simetri5. Asimtot6. Sentroid (Interseksi dari Asimtot)7. RL pada Sumbu Nyata8. Sudut Berangkat dan Sudut Datang9. Interaksi dengan Sumbu Imajiner10. Titik Breakaway (Sadel)11. Perhitungan Kc
032265 :PK 2 sKsssss c
39

1. Titik Kc = 0
032265 :PK 2 sKsssss c
40
• Pole:– s = 0, -5, -6, -1 ± i– Jumlah (m) = 5

2. Titik Kc = ±∞
032265 :PK 2 sKsssss c
41
• Zero:– s = -3– Jumlah (n) = 1

3. Jumlah Cabang
• Cabang selalu berasal dari pole• Ada 2 cabang, dari pole:
– Menuju zero– Menuju tak berhingga (∞)
• Jumlah semua cabang dari RL adalah sama dengan ORDE POLINOMIAL (jumlah pole)
• Jumlah cabang yang menuju ∞ = n - m• Orde = 5 jumlah semua cabang = 5• Jumlah zero = 1 jumlah cabang menuju ∞ = 4
032265 :PK 2 sKsssss c
42

4. Simetri
• RL yang sempurna adalah simetrik terhadap sumbu nyata dari bidang-s
032265 :PK 2 sKsssss c
43

5. Asimtot
ooook
k
mn
k
RL
135,135,45,4515
1212
:
ooook
k
mn
k
CRL
270,180,90,015
22
:
032265 :PK 2 sKsssss c
44

6. Sentroid (Interseksi dari Asimtot)
5.2
4
311650
1
iimn
zeropole
032265 :PK 2 sKsssss c
45

7. RL pada Sumbu Nyata
• Ada RL pada sumbu nyata antara:– s = 0 dan s = -3– s = -5 dan s = -6
• Ada CRL pada sumbu nyata antara:– s = -3 dan s = -5– s = -6 dan s = ∞
032265 :PK 2 sKsssss c
46

8. Sudut Berangkat dan Sudut Datang
• Sudut berangkat dari RL meninggalkan pole pada -1 + i. Jika s1 adalah titik pada RL meninggalkan pada -1 + i dan s1 sangat dekat dengan pole tersebut, maka:
o
oooooo
o
k
atau
kisssisss
8.43
180124.1114901356.26
1801216513 111111
47
032265 :PK 2 sKsssss c

9. Interseksi dengan Sumbu Imajiner
0
35atau 0163.01053940
309atau 0212.06.65 2
c
ccc
cc
K
KKK
KK
34.1dan 34.1
01052.58
03212.06.65
:35 Pada
2
2
isis
s
KsKsA
K
cc
c
48
032265 :PK 2 sKsssss c
Kurva memotong sumbu imajiner pada Kc = 35 dan Kc = 0

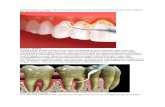
10. Titik Breakaway (Titik Sadel)
• Merupakan titik yang berada pada sumbu nyata (real) tempat bertemu akar (loci) pergi dan akar datang, tempat mulai memasuki daerah bilangan kompleks.
• Akar selalu datang dan pergi dengan sudut 90o pada titik breakaway.
m n
1 1
Metode lain:
1 1
i ji js z s p
OLTF0cdK d
ds ds
49

Titik Breakaway (Titik Sadel)
5 4 3 2
OLTF0
13 5 66 142 123 45 0
3 33 1 204
0 656 0 468
5 53
cdK d
ds ds
s . s s s s
s . i .
s . i .
s .
50
032265 :PK 2 sKsssss c

Titik Breakaway (Titik Sadel)
53.5
468.0656.0
204.133.3
045123142665.13
0180492568264544
0)180552650318675(60825413
060825413
)60164162525)(3()60825413)(1(''
0)22)(6)(5(
3OLTF
2345
2345
23452345
2345
2342345
2
2
s
is
is
sssss
s s sss
s + + s+ s+ s + ss s sss
s s sss
s sssss s sss
v
uvvu
sssss
s
ds
d
ds
d
ds
dKc
51
032265 :PK 2 sKsssss c
YANG DIPAKAI
Ada 5 akar

RL Sempurna
52