Modul 3_PS_Segmentasi Pasar, Pemilihan Target Pasar & Penentuan Posisi Merek _10 Februari 2013
Upload
eko-pampang-pasinggiCategory
view
72download
10description

Perancangan Sistem Penentuan Posisi (SPS)Sebagai Komponen Sistem Pemandu Museum
Eko Suripto P., Selo, Bimo Sunarfri H.Jurusan Teknik Elektro dan Teknologi Informasi
Universitas Gadjah Mada, IndonesiaEmail: ekosuripto [email protected], [email protected], [email protected]
Abstract—Konsep location-awareness dapat diterapkan padasistem pemandu museum agar sistem dapat memberikan infor-masi yang sesuai dengan posisi pengunjung museum. Untuk itudibutuhkan sebuah sistem penentuan posisi (SPS) yang akanmemberikan informasi posisi pengunjung. Paper ini membahasmengenai arsitektur umum pada sebuah SPS, pemilihan kompo-nen berdasarkan pertimbangan tertentu, dan ide pengembanganuntuk meningkatkan akurasi.
Indext Term- Location-awareness, penentuan posisi, arsitektur
I. INTRODUCTION
Ubiquitous computing merupakan sebuah konsep teknologimasa depan yang saat ini sedang dikembangkan melaluiberbagai penelitian. Salah satu komponen ubiquitous comput-ing adalah context-aware system, yaitu sistem yang memilikikemampuan mengadaptasi layanan dan informasi yang disedi-akan berdasarkan konteks. Konteks merupakan informasi yangdigunakan untuk menyatakan karakteristik suatu entitas danbersifat relevan terhadap interaksi penguna dan sistem [1]. Ter-dapat banyak jenis kontek, namun ada empat kontek yang lebihpenting dari pada yang lain, yaitu identitas, aktifitas, lokasi,dan waktu [2]. Sebuah sistem harus memperoleh informasikonteks dengan tepat untuk dapat menyediakan layanan yangsesuai [3].
Lokasi merupakan salah satu konteks yang penting dansering digunakan dalam berbagai sistem [4]. Aplikasi yangbersifat location-awareness dapat diterapkan untuk memban-gun sebuah sistem pemandu museum. Dengan menerepkankonsep tersebut sistem pemandu museum dapat menyesuaikaninformasi yang disajikan kepada pengunjung. Pada saat pen-gunjung berpindah dari satu posisi ke posisi yang lain, sistemakan mendeteksi hal tersebut dan menyajikan informasi yangsesuai dengan posisi baru pengunjung.
Teknologi Global Positioning System (GPS) merupakan sis-tem penentuan posisi yang paling luas digunakan saat ini danmenjadi sistem standar untuk penentuan posisi. GPS mampumemberikan tingkat akurasi yang tinggi untuk penggunaan diluar ruangan, namun akan menemukan tantangan yang sig-nifikan untuk penggunaan di dalam ruangan [5][6]. GPS tidakdirancang untuk penggunaan di dalam ruangan karena kondisitersebut tidak memungkinkan terjadinya transmisi yang tidakterhalang (Line of Sigh) antar perangkat dan satelit [7]. Olehkarena itu, GPS tidak cocok digunakan sebagai komponensebuah sistem pemandu museum. Dengan demikian diperlukan
sebuah sistem penentuan posisi yang khusus bekerja untuklingkungan di dalam ruangan (indoor).
Dari sisi topologi, secara umum SPS terdiri dari objek,referensi, dan komponen komputasi. Objek merupakan kom-ponen yang akan ditentukan posisinya sedangkan referensi,yang jumlahnya dapat terdiri dari beberapa buah, merupakankomponen yang dijadikan acuan dalam proses menentukan po-sisi tersebut. Proses komputasi dapat dilakukan pada perangkatobjek, referensi, ataupun pada perangkat yang terpisah darikeduanya.
II. ARSITEKTUR SPS
Secara umum, sistem penentuan posisi memiliki arsitek-tur dengan empat lapisan (output, parameter, teknik, danteknologi) seperti yang ditunjukkan pada Gambar 1. Dalam halini, arsitektur merujuk pada komponen-komponen penyusunsebuah SPS. Pada tiap lapisan terdapat beberapa kemungkinankomponen yang digunakan.
SPS dapat menyediakan beberapa pilihan jenis informasiposisi sebagai keluaran (output) sesuai dengan kebutuhan.Informasi tersebut dapat berupa lokasi absolut, relatif atauproximity [8] [9] [10]. Informasi absolut dinyatakan dalambentuk koordinat, misalnya koordinat (x,y). Informasi relatifdiperoleh berdasarkan referensi sebuah objek lain, misalnyaobjek A berada di sebelah kiri objek B. Informasi proximitydinyatakan bentuk simbolik, misalnya dapur, kantor, dan kelas.Sebuah sistem juga dapat mengkombinasikan jenis informasiuntuk memperkaya informasi, misalnya sebuah lokasi absolutditambah dengan informasi proximity sebagai tambahan infor-masi.
Parameter menyatakan sebuah karakteristik yang menjadiobjek pengukuran untuk digunakan sebagai masukan padaproses komputasi. Berikut ini adalah beberapa parameter yangbiasa digunakan sebagai komponen SPS [10]
• AOA (Angle of Arrival)AOA merupakan besar sudut yang dibentuk oleh arahdatang sebuah sinyal dengan sebuah arah referensi (mis-alnya arah Utara sebagai 0◦).
• TOA (Time of Arrival)TOA merujuk pada waktu propagasi sinyal (signal prop-agation time) dari titik asal ke titik tujuan atau dari titikasal hingga tiba dititik asal lagi. Teknik ini membutuhkansinkronisasi waktu yang akuran antar titik.

Gambar 1. Arsitektur SPS
• TDOA (Time Difference of Arrival): Parameter ini diper-oleh dari perbedaan TOA beberapa sinyal yang diterima.Teknik ini juga membutuhkan sinkronisasi waktu yangakurat.
• RSSI (Recieve Signal Strengh Indication)Dalam perambatannya sebuah sinyal akan mengalamipelemahan kuat sinyal (signal propagation loss) yangsebanding dengan jarak. nilai tersebut dapat diperolehdengan membandingkan kuat sinyal yang dipancarkandengan kuat sinyal yang diterima.
Hasil pengukuran parameter yang diperoleh kemudian dio-lah dengan suatu teknik untuk memperoleh perkiraan posisi.Ada berbagai teknik yang dapat digunakan, namun ada empatteknik yang umum digunakan, yaitu:
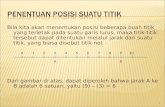
• TrilaterationTeknik ini menggunakan prinsip geometri untuk menghi-tung posisi sebuah titik berdasarkan jarak titik tersebutdengan beberapa titik (minimal 3 titik) yang diketahuiposisinya seperti pada Gambar 2.
Gambar 2. Teknik trilateration
• TriangulationTriangulation merupakan teknik untuk menentukan posisisebuah titik dengan cara menghitung sudut antar titiktersebut dengan kedua titik pada ujung sebuah garis yang
diketahui posisi dan panjangnya seperti yang ditampilkanpada Gambar 3.
Gambar 3. Teknik triangulation
• Scene AnalysisTeknik ini menentukan posisi dengan cara memband-ingkan hasil pengukuran pada suatu titik dengan nilaipada beberapa titik sampel yang diketahui lokasinya.Titik-titik sampel tersebut disebut fitur atau fingerprintseperti yang ditunjukkan pada Gambar 4. Ada beberapaalgoritma yang dapat digunakan untuk melakukan prosesperbandingan tersebut, yaitu k Nearest Neighboar (kNN),Fuzzy Logic, Neural Network (NN), Support Vector Ma-chine (SVM), Smallest M-vertex Polygon (SMP).
• ProximityTeknik proximity digunakan untuk menentukan area di-mana sebuah titik berada . Sebuah titik dinyatakan ma-suk ke dalam sebuah area berdasarkan suatu parame-ter tertentu, misalnya, jarak terhadap titik referensi dankuat sinyal. Pada Gambar 5, Objek 1 dinyatakan masukkedalam area sedangkan Objek 2 tidak.
Dibutuhkan suatu teknologi yang akan dijadikan sebagidasar pengembangan SPS. Aspek utama yang dimanfaatkandari teknologi tersebut adalah sinyal yang dipancarkan. Berikutini beberapa teknologi yang telah digunakan untuk memban-gun sebuah SPS.
• Infrared

Gambar 4. Teknik fingerprint
Gambar 5. Teknik proximity
InfraRed merupakan gelombang eletromagnetik denganpanjang gelombang 700 nm - 1 mm dan frekuensi 430THz - 300 GHz. Dalam bidang komunikasi infrareddigunakan sebagai media transmisi. Teknologi infraredadalah generasi pertama dari teknologi koneksi nirkabelyang digunakan untuk perangkat mobile.
• Ultrasound
• Radio frequencyGelombang radio merupakan golombang eletronik yangmemiliki panjang gelombang 1 mm - 10.000 km danfrekuensi 3 THz - 3Hz. Beberapa teknologi nirkabelyang digunakan saat ini bekerja pada rentang frekuensigelombang radio.
– Bluetooth: teknologi Bluetooth bekerja padafrekuensi 2,4 GHz dengan jangkauan hingga 100m. Diaplikasikan pada berbagai perangkat untukmembangun Personal Area Network (PAN).
– Teknologi WLAN: WLAN bekerja pada frekuensi2,4 GHz dan 5. GHz. Saat ini teknologi ini meru-pakan teknologi yang paling umum digunakan dantelah tertanam pada berbagai perangkat, khususnyaperangkat mobile seperti laptop dan smartphone.
– RFID: RFID (Radio Frequency Identification) meru-pakan teknologi identifikasi yang memanfaatkangelombang radio sebagai media transmisi. RFIDterdiri dari RFID-tag dan RFID-reader. Setiap RFID-tag memiliki sebuah kode yang unik sebagai identitas
yang dapat dibaca oleh RFIDreader dengan caramengirimkan request. RFID bekerja pada berbagaipanjang gelombang dengan jangkauan area hingga200 m.
– WSN: WSN merupakan sekumpulan perangkat sen-sor yang bersifat otonom dan untuk mengirimkandata membentuk suatu jaringan yang bersifat ad-hoc.WSN bekerja pada frekuensi 315, 868, 915, dan 2400MHz.
Tidak semua kemungkinan kombinasi dari teknologi, teknik,parameter dan output dapat diterapkan untuk membangunsuatu SPS [11]. Hal tersebut disebabkan oleh adanya keter-batasan tiap komponen serta kecocokan antar komponen padalapisan yang berbeda. Sebagai contoh, teknik Trilateration,Triangulation, dan Scene analysys mampu menyediakan ketigajenis output sedangkan teknik Proximity hanya dapat menye-diakan jenis informasi proximity. Infrared memiliki jangkauanyang pendek sehingga hanya cocok untuk teknik proximity.
III. PEMILIHAN KOMPONEN
Pemilihan komponen penyusun sebuah SPS dilakukandengan berbagai pertimbangan, misalnya kebutuhan sistem,keadaan lingkungan, dukungan infrastruktur, biaya, dan kesuli-tan implementasi. Museum sebagai lokasi penerapan sistemyang akan dibangun dalam penelitian ini memiliki karakterkhusus yang akan digunakan sebagai bahan pertimbanganpemilihan komponen. Berikut ini beberapa kondisi yang di-gunakan dalam pemilihan komponen SPS ini.
• Museum memiliki luas sekitar 50 m x 50 m. Potongandenah museum tersebut dapat dilihat pada Gambar 6.
• Bagian dalam museum dibagi menjadi ruangan-ruangankecil dengan ukuran bervariasi (panjang sisi dari 5 m -13 m).
• Sebagian besar artefak museum dipajang di dalam lemaridengan ukuran bervariasi dari 1 m - 2,5 m.
• Posisi lemari artefak dalam museum cenderung konstan.• Sistem pemandu museum yang akan dibangun berupa
perangkat lunak yang dijalankan pada perangkat smart-phone.
• Informasi yang disertakan dalam perangkat lunak akandiletakkan pada sebuah komputer server sehinggaperangkat harus selalu terhubung jaringan.
Berikut ini adalah komponen-komponen yang dipilih besertapertimbangan yang dilakukan.
• Teknologi: WLANTeknologi WLAN dipilih karena setiap perangkat smart-phone telah memiliki fitur WLAN, selain bluetooth yangjuga menjadi pertimbangan. Dari sisi biaya, penggunaanWLAN merupakan pemanfaatan infrastruktur yang adasehingga tidak memerlukan infrastruktur tambahan. SPSberbasis WLAN relatif lebih mudah untuk diitegrasikandengan perangkat smartphone.
• Teknik: Scene analysisBangunan yang terdiri dari beberapa ruangan dapat men-gakibatkan adanya fenomena multipath pada signal yang

Gambar 6. Potongan denah ruangan museum
dapat memperngaruhi pengukuran suatu parameter sinyal.hal tersebut dapat diatas kelebihan yang dimiliki olehteknik scene analyisis yang hanya melihat nilai parametersuatu titik tanpa memperdulikan kasus multipath.Algoritma yang akan digunakan pada saat ini belumditentukan karena masih membutuhkan kajian untukmenentukan algoritma yang sesuai.
• Parameter: RSSIDari sisi kemudahan implementasi, RSSI relatif lebihmudah dibandingkan parameter lainnya. AOA membu-tuhkan penggunaan antena array yang berarti penamba-han perangkat. TOA dan TDOA membutuhkan sinkro-nisasi waktu antar perangkat smartphone dan accesspoint (AP). Sinkronisasi tersebut membuat implementasimenjadi sulit karena membutuhkan akurasi yang tinggidan juga karena sistem pemandu tersebut akan dijalankanpada masing-masing perangkat pengunjung.
• Output: Posisi absolutOutput yang diharapkan dari SPS ini berupa posisi yangmerujuk pada area-area kecil yang disesuaikan denganukuran artefak museum (Gambar 6). Tingkat akurasi yangdiharapkan dari SPS ini tergantung dengan ukuran areatersebut, semakin kecil ukuran area maka dibutuhkanakurasi yang lebih tinggi. Oleh karena museum memilikiarea yang cukup luas dan juga jumlah artefak yangbanyak sehingga penggunaan posisi relatif akan menim-bulkan kerumitan implementasi.
IV. IDE DAN TANTANGAN PENGEMBANGAN
Untuk meningkatkan kualitas SPS, khususnya akurasi, be-berapa ide dan tantangan pengembangan dalam pengembangansistem ini antar lain:
• Kombinasi teknik scene analysis dan teknik trilateration.Parameter RSSI dapat digunakan pada kedua tekniktersebut sehingga kombinasi kedua teknik tersebut dapatdilakukan. Untuk dapat menggunakan teknik trilaterationmembutuhkan tambahan informasi kuat sinyal yang di-pancarkan oleh masing-masing AP. Teknik trilaterationhanya dimanfaatkan pada saat ada koneksi bersifat LOS(Line of sight), yaitu pada saat AP dan perangkat beradadalam ruangan yang sama.
• Map matching.Hasil perkiraan posisi yang dihasilkan berpeluang un-tuk mengalami kesalahan seperti yang ditunjukkan padaGambar 7. Posisi perkiraan dapat berada pada posisi yangtidak mungkin terjadi, misalnya pada dinding atau di luarruangan. Oleh sebab itu dibutuhkan sebuah mekanisme,yang disebut map matching, untuk memetakan hasil terse-but pada area yang memungkinkan.
• Probabilitas berdasarkan rute pengunjung.Rute yang dilalui para pengunjung dapat membentuksuatu pola yang dapat dimanfaatkan. Pada Gambar 6ditunjukkan salah satu kemungkinan rute yang dilaluioleh pengunjung. Rute tersebut dapat memberikan nilaiprobabilitas suatu area akan dikunjungi setelah area ter-tentu.

Gambar 7. Kemungkinan posisi hasil perkiraan
• Jumlah dan peletakan APPenentuan jumlah AP point terkait aspek ekonomi danakurasi. Jumlah AP yang banyak akan meningkatkanakurasi [12] namun akan meningkatkan biaya. PeletakanAP juga berpengaruh pada tingkat akurasi penentuanposisi [13]. Dari sisi komunikasi, peletakan AP bertujuanuntuk memaksimalkan jangkauan dengan meminimalisiroverlap antar AP, namun untuk kebutuhan penentuanposisi dibutuhkan overlap jangkauan antar AP. Untuk itudiperlukan optimasi jumlah dan peletakan AP.
• Perbedaan pembacaan RSSI oleh beberapa jenis chipsetPerbedaan pembacaan RSSI oleh beberapa jenis chipsetdapat mempengaruhi akurasi sebuah SPS [14] karenadimungkinkan sebuah perangkat salah membaca nilaiRSSI.
V. KESIMPULAN
Sistem penentuan posisi (SPS) dapat dikembangkan untukmenjadi komponen sistem pemandu museum untuk menerap-kan konsep location-awareness sehingga dapat menyesuaikaninformasi kepada pengunjung. Pemilihan komponen dalampengembangan sebuah SPS harus mempertimbangkan berba-gai kondisi dan kebutuhan.
REFERENCES
[1] P. Prekop and M. Burnett, “Activities, context and ubiquitous comput-ing,” Computer Communications, vol. 26, no. 11, pp. 1168–1176, 2003.
[2] G. D. Abowd, A. K. Dey, P. J. Brown, N. Davies, M. Smith, andP. Steggles, “Towards a better understanding of context and context-awareness,” in Handheld and ubiquitous computing. Springer, 1999,pp. 304–307.
[3] E. Kim and J. Choi, “A context management system for supportingcontext-aware applications,” in Embedded and Ubiquitous Computing,2008. EUC’08. IEEE/IFIP International Conference on, vol. 2. IEEE,2008, pp. 577–582.
[4] B. Schilit, N. Adams, and R. Want, “Context-aware computing applica-tions,” in Mobile Computing Systems and Applications, 1994. WMCSA1994. First Workshop on. IEEE, 1994, pp. 85–90.
[5] A. M. Ladd, K. E. Bekris, A. P. Rudys, D. S. Wallach, and L. E. Kavraki,“On the feasibility of using wireless ethernet for indoor localization,”IEEE Transactions on Robotics and Automation, vol. 20, no. 3, pp. 555–559, 2004.
[6] J. Xiao, Z. Liu, Y. Yang, D. Liu, and X. Han, “Comparison and analysisof indoor wireless positioning techniques,” in Computer Science andService System (CSSS), 2011 International Conference on. IEEE, 2011,pp. 293–296.
[7] Y. Gu, A. Lo, and I. Niemegeers, “A survey of indoor positioningsystems for wireless personal networks,” Communications Surveys &Tutorials, IEEE, vol. 11, no. 1, pp. 13–32, 2009.
[8] H. Liu, H. Darabi, P. Banerjee, and J. Liu, “Survey of wireless indoorpositioning techniques and systems,” Systems, Man, and Cybernetics,Part C: Applications and Reviews, IEEE Transactions on, vol. 37, no. 6,pp. 1067–1080, 2007.
[9] Y. Wang, X. Jia, H. Lee, and G. Li, “An indoors wireless positioningsystem based on wireless local area network infrastructure,” in 6th Int.Symp. on Satellite Navigation Technology Including Mobile Positioning& Location Services, no. 54, 2003.
[10] J. Hightower and G. Borriello, “Location systems for ubiquitous com-puting,” Computer, vol. 34, no. 8, pp. 57–66, Aug 2001.
[11] C. Esposito and M. Ficco, “Deployment of rss-based indoor position-ing systems,” International Journal of Wireless Information Networks,vol. 18, no. 4, pp. 224–242, 2011.
[12] Z. Yang and Y. Liu, “Quality of trilateration: Confidence-based iterativelocalization,” Parallel and Distributed Systems, IEEE Transactions on,vol. 21, no. 5, pp. 631–640, 2010.
[13] R. Priwgharm and P. Chemtanomwong, “A comparative study on indoorlocalization based on rssi measurement in wireless sensor network,”in Computer Science and Software Engineering (JCSSE), 2011 EighthInternational Joint Conference on. IEEE, 2011, pp. 1–6.
[14] G. Lui, T. Gallagher, B. Li, A. G. Dempster, and C. Rizos, “Differencesin rssi readings made by different wi-fi chipsets: A limitation of wlanlocalization,” in Localization and GNSS (ICL-GNSS), 2011 InternationalConference on. IEEE, 2011, pp. 53–57.
Copyright © 2022 FDOKUMEN