Sistem Keamanan

of 8
description
Sistem Keamanan Jaringan
Transcript of Sistem Keamanan
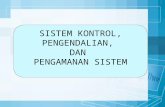
Artoo : Autonomous Mobile Robot yang Dapat belajar Lokalisasi dan PemetaanLingkunganDECEMBER 31, 20111 COMMENTI. Mobile Robot dan Kendala yang DihadapinyaMobile robot (robot bergerak) adalah jenis robot yang memanfaatkan aktuator/penggerak untuk mengubah keadaan (state) dan bentuk fisiknya. Dalam kasus wheeled mobile robot yang saya konstruksi, aktuator/penggerak tadi berupa 2 buah motor DC yang terhubung dengan dua roda dan di-integrasikan dengan gearbox. Lantas apa yang membuat robot saya ini berbeda dengan robot-robot yang telah dibuat oleh mahasiswa ITB (bahkan Indonesia) sebelumnya?. Yang membuat Artoo (nama robot-red) istimewa adalah kemampuan robot ini untuklearningbelajar dan menanganiuncertaintyketidak-pastian yang datang dari lingkungan sekitar si robot dan fisik robot itu sendiri.Untuk memberi gambaran seperti apa proseslearningdan ketidakpastian tersebut saya akan menjelaskan terlebih dahulu robot yang selama ini dibuat oleh mahasiswa ITB dan Indonesia pada umumnya serta kendala apa yang mencegahnya untuk dapat dipakai di aplikasi outdoor. Robot yang selama ini kita buat (mis. robot yang dilombakan di Kontes Robot Nasional) adalah robot yang didesain untuk lingkungan dengan keadaan dan rintangan-rintangan yang jelas dan dapat diketahui pasti sebelum si robot mulai dijalankan. Kalaupun ada ketidakpastian maka jumlah kombinasi dan permutasi yang ada relatif kecil. Sebagai contoh robot pemadam api (fire fighting) yang bertugas untuk memadamkan lilin secepat mungkin dalam suatumaze(labirin) dan kemudian kembali ke tempat semula adalah contoh darienvironment(lingkungan) yang sifatnya deterministik . Di sini deterministik berarti fisik labirin (jumlah ruangan , ukuran , warna , rintangan yang ada) sudah diketahui sebelumnya.Namun apa yang terjadi ketika robot seperti ini dipaksa untuk menghadapi kondisi real (mis. api sebenarnya dan lingkungan outdoor )? Jawaban yang sudah jelas : robot ini akan gagal. Kenapa? Banyaknyanoise(derau) di sensor dan lingkungan , fisik lingkungan yang tak tentu , kemampuan sensor dan kapasitas baterai yang terbatas menjadi beberapa dari sekian banyak alasan. Maka diperlukan pemodelan dan program dalam level yang benar-benar berbeda untuk membuat robot yangrobust(kokoh) dalam menangani ketidakpastian tersebut. Metode yang akan saya ajukan untuk hal ini merupakan manifestasi dari bidang baru dalam robotika dan dalam beberapa tahun belakangan ini menjadi topik riset yang populer di universitas-universitas di USA dan Eropa. Metode ini dinamakan Probabilistic Robotics dan Machine Learning.II. Probabilistic RoboticsProbabilistic Robotics adalah suatu disiplin ilmu yang memanfaatkan prinsip prinsip probabilitas untuk mengestimasistate(keadaan) dari robot. Keadaan yang akan diestimasi dalam hal ini adalah posisi dalam bidang dua dimensi (X,Y) dan orientasi/sudut hadap si robot (). Jadi keadaan ini dapat dinotasikan dalam suatu vektor tiga dimensi mis. S =( ) . Untuk kasus robot terbang(aerial robot)dan robot bawah laut(underwater robot)dimensi S lebih besar (total berjumlah enam) karena adanya tambahan sumbu ketinggian(height)(X,Y,Z) dan sumbu putar/orientasi yang juga berjumlah tiga (x, y, z). Ilustrasi dari perbedaan dimensi vektor state dapat dilihat dari gambar di bawah: Artoo (ground robot)
Gambar 1. Representasi dimensi gerak ground robot Aerial dan Underwater robot
Gambar 2. Sumbu gerak aerial robot , total terdapat 6 sumbu gerak.Dari data-data yang ada di vektor S dan prinsip probabilitas, maka kita dapat menyelesaikan 2 permasalahan utama yang tidak dapat diselesaikan dengan metode yang selama ini diimplementasikan di robot-robot sebelumnya. Permasalahan tersebut adalahlocalization(lokalisasi) danmapping(pemetaan). Penjelasan tentang localization dan mapping akan saya ilustrasikan dengan gambar . Pertama tama masalah localization . Spesifikasi masalah ini adalah kita ingin mengetahui posisi/lokasi robot yang di lingkungan yang sudah tersedia map/petanya. Contoh nyatanya adalah robot vacuum cleaner yang ditempatkan secara acak di rumah kita. Robot akan berusaha mengira-ngira lokasinya (apakah di dapur, kamar, dsb) dengan memanfaatkan denah rumah yang sudah diberikan. Masalah ini terkesan mudah untuk manusia, namun cukup sulit untuk robot yang kemampuan sensingnya terbatas.Algoritma yang saya akan implementasikan untuk hal ini disebut dengan Particle Filter. Yaitu metode dimana robot membentukprobability densityyang menggambarkan seberapa kuat dugaan si robot di posisi tertentu. Tentunya pertama-tama si robot sama sekali buta akan posisinya. Maka probability density yang dihasilkan akan merata . Untuk mendeteksi lingkungan sekitarnya, robot dilengkapi dengan sensor laser/sonar. Cara kerja sensor ini adalah dengan menembakkan sinar laser , menangkap kembali pantulan sinar tersebut, dan menghitung jarak pantul ke objek yang mengenainya . Penjelasan di atas dapat diilustrasikan dengan gambar berikut.
Gambar 3. Gambar denah/peta lingkungan robot berada. Mula-mula robot tak punya petunjuk mengenai posisinya sehingga membentuk dugaan yang digambarkan berupa kumpulan titik-titik yang tersebar dimana-mana. Titik titik tersebut adalah dugaan awal robot mengenai posisi dirinya.Kemudian , robot mulai bergerak, danprobability densityyang dibentuk pun akan berubah
Gambar 4. Robot bergerak, dan titik titik yang tadinya tersebar merata mulai memadat dan membentuk dugaan yang lebih kuat akan lokasi si robot.
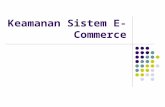
Gambar 5. Ketika robot bergerak semakin jauh, informasi yang didapat semakin banyak. Hal ini semakin memperkuat estimasi posisi robot. Pada gambar di atas, terlihat particles/titik-titik di lorong semakin padat dan terkumpul menunjukkan dugaan si robot berada di lorong (bukan dalam ruangan) lebih kuat
Gambar 6. Pada gambar di atas, robot semakin yakin akan posisinya sehingga kemungkinan posisi robot yang mungkin hanya berupa 5 titik yang ditunjukkan bercak merah di lorong denah tersebut.
Gambar 7. Setelah menjalani cukup banyak bagian dari lingkungan, maka robot merasa benar benar yakin akan posisinya sehingga menyisakan hanya satu titik particles.Seperti itulah kira kira gambaran dari proses localization dari robot saya nantinya. Algoritma particle filter atau biasa juga disebut Monte Carlo Localization (MCL) dapat dibuat dalam pseudo code sebagai berikut:
Bagaimana jika kita tidak mempunyai peta/denah lingkungan? Maka robot harus ditambahkan dengan kemampuan mapping (pemetaan). Spesifikasi permasalahannya, robot yang tadinya tidak punya informasi tentang bentuk fisik lingkungan (ukuran, rintangan yang ada) harus bisa menggambarkan keadaan lingkungannya sendiri. Proses mapping ini dapat direalisasikan dengan algoritmaoccupancy grid mapping .Pseudocode dari algoritma ini adalah sebagai berikut:
Dan contoh hasil dari occupancy grid mapping ditunjukkan dari gambar di bawah. Pada gambar tersebut , diperlihatkan bahwa robot berhasil memetakan sekitarnya dan hasil yang diperoleh adalah denah 2 dimensi dari lingkungan si robot.
Gambar 8. Peta bentukan dari robot dengan memanfaatkan algoritma occupancy grid mapping.III. Machine LearningSatu lagi metode kunci dalam membangun robot yang bisa beradaptasi dengan ketidakpastian adalah metode yang dinamakan Machine Learning. Definisi dari machine learning adalah suatu bidang yang mempelajari tentang algoritma/program yang dapat belajar untuk mengimprovisasi sendiri. Contoh aplikasi yang sering kita temui dari machine learning adalah google search engine dan e-mail spam filter. Dalam mencari dan mengklasifikasi data dari milyaran data di internet, google memakai teknik teknik machine learning. Begitu juga dengan spam filter. Filter ini belajar membedakan e-mail spam dengan e-mail yang bukan spam. Bayangkan tanpa machine learning dan spam filter, maka bisa jadi kita menerima ratusan spam setiap harinya. Lalu bagaimana machine learning dapat dipakai di robot? Prinsip machine learning akan saya gunakan untuk mengklasifikasi keadaan lingkungan dari gambar yang diperoleh melalui kamera yang terpasang di robot. Keadaaan lingkungan yang dapat diklasifikasi antara lain adalah membedakan jalur tanah yang aman untuk dilalui robot dan yang tidak dapat dilewati. Ilustrasi kerja machine learning dapat dilihat dari gambar di bawah. Pada gambar terlihat kamera berhasil membedakan jalan yang bebas rintangan dengan jalan yang berbahaya untuk dilalui.
Gambar 9. Klasifikasi jalur jalan yang aman untuk dilewati dengan machine learning. Jalan yang aman dilalui ditandai dengan garis putihnb: Sekali kali pake bahasa Indonesia buat postingan di blog..tapi alasan sebenarnya tulisan ini hasil kopas dari proposal saya buat lomba karya cipta di kampus dan saya agak malas translate-in ke bahasa Inggris. Hehe..:)And thats a brief explanation about my current project. Hope you get the idea.