Robot Pengebor PCB Berbasis Microcontroller AT89C51
58
BAB I PENDAHULUAN 1.1. Latar Belakang Di dalam kehidupan teknologi awal abad 21 ini, banyak hal-hal yang biasa dilakukan oleh manusia dilakukan oleh tenaga mesin, terutama hal-hal yang dilakukan secara rutin dan biasanya membosankan. Di negara-negara maju dalam dunia bisnis terutama pada suatu perusahaan (pabrik) semuanya dioperasikan menggunakan tenaga mesin dan selain itu juga hal-hal yang sangat sederhana dan sepele pun dilakukan oleh tenaga mesin, misalnya menggosok gigi, mengaduk adonan kue, mengecat dinding, berjalan, menaiki tangga, menyeduh kopi dan bahkan yang sangat sederhana misalnya makan yang dikerjakan dengan bantuan tenaga mesin. Kehidupan sehari-hari banyak pekerjaan-pekerjaan yang kita lakukan secara berulang-ulang. Manusia adalah makluk 1
-
Upload
radiomatrixfm-ponorogo -
Category
Documents
-
view
242 -
download
2
description
Materi Robot PCB
Transcript of Robot Pengebor PCB Berbasis Microcontroller AT89C51

BAB I
PENDAHULUAN
1.1. Latar Belakang
Di dalam kehidupan teknologi awal abad 21 ini, banyak hal-hal yang biasa
dilakukan oleh manusia dilakukan oleh tenaga mesin, terutama hal-hal yang
dilakukan secara rutin dan biasanya membosankan. Di negara-negara maju dalam
dunia bisnis terutama pada suatu perusahaan (pabrik) semuanya dioperasikan
menggunakan tenaga mesin dan selain itu juga hal-hal yang sangat sederhana dan
sepele pun dilakukan oleh tenaga mesin, misalnya menggosok gigi, mengaduk
adonan kue, mengecat dinding, berjalan, menaiki tangga, menyeduh kopi dan bahkan
yang sangat sederhana misalnya makan yang dikerjakan dengan bantuan tenaga
mesin.
Kehidupan sehari-hari banyak pekerjaan-pekerjaan yang kita lakukan secara
berulang-ulang. Manusia adalah makluk yang diciptakan oleh Tuhan sebagai makluk
yang dilengkapi dengan akal, pikiran, dan mempunyai pola pikir yang terus menerus
berkembang. Manusia oleh Tuhan dilengkapi dengan perasaan, emosi, senang, bosan,
bahagia, sedih, kecewa dan juga sifat fisik yang senantiasa mengalami kelelahan
apabila terus melakukan pekerjaan yang monoton sekaligus membosankan.
Untunglah manusia oleh Tuhan dibekali dengan akal sehingga dia dapat mencipta,
merasa dan mewujudkan kehendak hatinya. Di Era tahun 2000-an adalah tahun
dimana banyak tenaga manusia yang diganti dengan tenaga mesin, sebagaimana
1

dikatakan dalam sebuah lagu bahwa tahun 2000 adalah tahun yang penuh dengan
tantangan dan banyak kegiatan manusia yang dilakukan dengan tenaga mesin apalagi
dalam suatu pabrik ataupun perusahaan yang besar, maka akan besar
kemungkinannya untuk menggunakan tenaga mesin. Dengan berlatar belakang itulah
maka kami bermaksud untuk merancang dan membuat “Robot Pengebor PCB
Berbasis Mikro Kontroller AT89C51”
1.2. Rumusan Masalah
Dalam rangka menyelesaikan Robot Pengebor PCB ini, agar pembahasan tidak
terlalu melenceng jauh dari yang dikehendaki, maka kami bermaksud untuk
menyampaikan permasalahan yang kami bahas berkaitan dengan robot ini, yaitu :
1. Bagaimana cara meningkatkan kualitas presisi, akurasi, dan fleksibilitas
pengeboran PCB dengan memanfaatkan teknologi mikrokontrol ini.
2. Bahasa pemrograman yang digunakan.
Masalah-masalah diatas adalah masalah yang harus diselesaikan agar dapat
terlaksananya karya tulis ini.
1.3. Tujuan Pembuatan Alat
Tujuan pembuatan karya tulis ini adalah untuk menciptakan alat yang mampu
merubah pola pembuatan PCB secara manual menjadi otomatis
2

1.4. Batasan Masalah
Didalam melakukan kegiatannya robot ini mempunyai banyak permasalahan,
maka agar tidak menyimpang perlu ada pembatasan masalahnya, adapun batasan
masalahnya adalah sebagai berikut :
1. Mengingat penggunaan PCB saat ini menggunakan double layer, maka dalam hal
ini hanya untuk PCB single layer saja.
2. Ukuran PCB yang bisa dipasang maksimal 20 cm x 20 cm.
3. Hanya menggunakan 1 ukuran lubang PCB.
4. Karena lubang pin-pin itu bervariasi, maka bagi ukuran yang berbeda harus
mengganti mata bornya terlebih dahulu pada proses pengeboran yang selanjutnya.
5. Nilai koordinat Xmin = 0, Xmax = 80, Ymin = 0, Ymax = 80.
1.5. Metodologi Perancangan Alat
Untuk mencapai tujuan yang direncanakan dengan hasil optimal, maka dalam
pengerjaannya laporan akhir ini dilakukan secara bertahap dengan langkah-langkah
sebagai berikut :
1. Studi literatur tentang kinerja robot.
2. Survei tentang komponen yang memenuhi.
3. Desain rangkaian dan PCB.
4. Membuat software dan simulasi dengan asm51.
5. Pembuatan lay out PCB.
6. Memasukkan software kedalam AT89C51.
3
7. Pengujian rangkaian secara blok.
8. Pengujian dan perakitan rangkaian secara menyeluruh.
9. Pembuatan laporan.
10. Finishing.
1.6. Sistematika Pembahasan
Pembahasan yang sistematis merupakan suatu faktor penting dalam penyusunan
laporan akhir. Sistematika penulisan yang dipakai dalam laporan akhir ini mempunyai
sistem pembahasan yang dibagi dalam beberapa bab yang masing-masing bab dibagi
menjadi beberapa sub bab sebagai berikut :
BAB I : PENDAHULUAN
Berisi tentang Latar Belakang, Perumusan Masalah, Tujuan Pembuatan
Alat, Batasan Masalah, Metodologi Perancangan Alat, Sistematika
Perancangan Alat.
BAB II : LANDASAN TEORI
Berisi tentang teori dasar dan pengetahuan yang melandasi dan
mendukung pembuatan alat.
BAB III : PERENCANAAN DAN PEMBUATAN ALAT
Berisi tentang perencanaan dan perhitungan perencanaan komponen yang
dibutuhkan dalam pembuatan alat.
4

BAB IV : PENGUJIAN ALAT, ANALISA ALAT DAN ANALISA KINERJA
ALAT
Berisi tentang pengujian komponen, rangkaian blok, rangkaian
seluruhnya, prinsip kerja, cara pengoperasian dan spesifikasi alat.
BAB V : PENUTUP
Berisi tentang kesimpulan dan saran.
5

BAB II
LANDASAN TEORI
2.1 Pendahuluan
Landasan teori sangat membantu untuk dapat memahami suatu sistem, dan
sebagai acuan dalam merencanakan suatu sistem. Dengan pertimbangan
tersebut, maka kajian pustaka merupakan kajian yang harus dipahami.
Dalam hal ini akan di bahas mengenai mikrokontrol, motor stepper, seven
segmen, transistor dan relay.
2.1.1 Mikro Kontroller AT89C51
Mikrokontroller memiliki CPU juga dilengkapi dengan memori dan input
output yang merupakan kelengkapan sebagai sistem minimum mikro komputer
sehingga sebuah meikrokontrol dapat dikatakan sebagai mikro komputer dalam
keping tunggal (single chip mikro komputer) yang dapat berdiri sendiri.
Mikrokontrol AT89C51 merupakan mikrokontroller keluarga MCS-51,
membutuhkan daya yang rendah dan merupakan mikrokomputer 8 bit yang
dilengkapi dengan 4 kilo byte EPROM (Eresable and ProgramableRead Only
Memory) dan 128 byte RAM internal. Program memori dapat diprogram ulang
dalam sistem atau dengan menggunakan programer (Nonvolately Memory
Konvensional). Dalam sistem mikrokontrol terdapat dua hal yang mendasar, yaitu
perangkat keras dan perangkat lunak yang keduanya saling terkait dan saling
mendukung.
6
2.1.1 Arsitektur Mikrokontrol
Mikrokontrol digunakan sebagai pengendali utama yang mempunyai
fungsi pemproses atau pengolah data yang diterima dari sensor dan
mengoperasikannya sesuai dengan program yang dibuat, kemudian memberikan
keluaran berupa pengaturan lampu indikator, gerakan motor. Mikrokontrol yang
digunakan pada sistem “Robot Pengebor PCB“, ini adalah AT89C51 produksi
ATMEL Inc.
Secara garis besar mikrokontrol AT89C51 memiliki keistimewaan sebagai
berikut:
a. Kapasitas EPROM internal sebesar 4 Kbyte untuk memori program.
b. Kapasitas RAM internal sebesar 128 Byte untuk memori data yang terdiri dari:
4 Register Bank masing-masing berisi 8 register.
16 Byte yang dapat dialamati per bit maupun per byte.
80 Byte memori generel purpose.
32 Bit saluran I/O (input/output) tersusun sebagai 4 port @ 8 bit
(programable).
c. Pengalamatan memory program eksternal sampai 64 Kbyte.
d. Pengalamatan memori data eksternal sampai 64 Kbyte.
e. 2 Buah Timer/Counter.
f. Data serial Transmitter/Receiver full duplex.
g. Lima jalur interupt.
h. Rangkaian Osilator dan clock.
i. Beroperasi pada tegangan tunggal 5 volt.
7
(sumber : Materi Training Basic Mikrokontrol AT89C51, 2002:1)
2.1.3 Organisasi Memori
Organisasi Memori Mikrokontroler dibedakan menjadi 2 bagian, yaitu
memori data dan memori program. Pembagian ini berdasarkan fungsi dalam
menyimpan data atau program. Memori data digunakan untuk menyimpan data-
data yang diproses oleh mikrokontrol, sedangkan memori program digunakan
untuk menyimpan intruksi-instruksi yang akan dijalankan oleh mikrokontrol.
2.1.3.1 Memori Data
Memori data berupa RAM (Random Access Memory) digunakan untuk
menyimpan data yang bersifat sementara. RAM disebut juga memori baca tulis
(Read Write Memory) yang ekuivalen dengan sekelompok register yang dapat
dialamati (Moh Ibnu Malik, 1997). Setelah disediakan sebuah alamat, isi yang
tersimpan pada lokasi memori dapat dibaca dengan alamat itu, atau menuliskan
isi yang baru kedalam lokasi tersebut. RAM merupakan jenis memori yang
mudah terhapus, yaitu bila catu dayanya dimatikan, isi yang terkandung di
dalam RAM akan hilang.
Teknologi yang dipakai dalam RAM yaitu dinamik dan statik. Data yang
disimpan pada memori dinamik akan hilang secara beransur-ansur, sehingga
diperlukan penyegaran (refresh). Hal ini dikarenakan data disimpan sebagai
muatan dalam kapasitansi gerbang substat transistor MOS. Sedangkan RAM
statik menyimpan satu bit data dalam flip-flop sehingga isi yang terdapat
didalamnya tetap stabil selama catu daya ada (Moh Ibnu Malik, 1997).
Mikrokontrol AT89C51 memiliki memori data internal berupa RAM
berkapasitas 128 byte yaitu 00H – 7FH yang terbagi atas tiga daerah, yaitu:
Empat Bank Register
8
Setiap bank terdiri dari 8 register (R0-R7) sehingga jumlah register untuk
keempat bank register (bank0 – bank3) menjadi 32 buah register yang
menempati ruang alamat 00H – 1FH. Mengaktifkan salah satu bank register
dapat dilakukan dengan mengatur RS0 – RS1 pada PSW (Program Status Word)
Bit Addressable
Terdiri dari 16 byte yang berada pada alamat 20H – 2FH. Masing-masing
128 bit lokasi ini dapat dialamati secara langsung.
Scratch pada general purpose register
Terdiri dari 80 byte yang menempati alamat 30H – 7FH, yang dapat
dialamati secara langsung dan digunakan untuk keperluan umum (general
purpose) misalnya digunakan untuk lokasi stack.
Gambar 2.1 Organisasi RAM Internal (Sumber : Moh Ibnu Malik,1997)
Tabel 2.1 Pengaturan RS0 RS1 untuk select Register Bank(Sumber : Bereksperimen dengan Mikrokontrol 8051, Moh Ibnu Malik)
9
RS1 RS0 Select Register Bank0 0 Bank 00 1 Bank 11 0 Bank 21 1 Bank 3
2.1.3.2 Memori Program
Memori program berupa ROM (Read Only Memory) digunakan untuk
menyimpan instruksi-instruksi utama yang bersifat tetap. Pada mikrokontrol
AT89C51 memori program internal menggunakan FLASH PEROM
(Programable and Erasable Read Only Memory) yaitu merupakan memori
jenis nonvolatile sehingga isinya tidak mudah hilang, walaupun catu
dayanya dimatikan dan penghapusan data dapat dilakukan dengan
menggunakan sinyal listrik secara sesaat. Kapasitas memori internal 4 Kbyte
(0000H – 0FFFH) dengan lebar jalur alamat 16 bit.
Untuk mengakses memori program internal, kaki EA dihubungkan ke VCC
dab kaki PSEN tidak diaktifkan. Sedangkan untuk mengakses memori program
eksternal kaki EA dihubungkan ke ground dan kaki PSEN diaktifkan (Moh Ibnu
Malik, 1997). Konfigurasi perangkat keras yang diperlukan untuk mengakses memori
program eksternal ditunjukkan pada gambar 2.2
10Port 3
PSEN
AT89C51
EEPROM
LATCH
Port 1
ALE
alamat
Port 0 bus data
Port 2 alamat

Gambar 2.2 Pengaksesan Memori Program Eksternal(sumber : MCS-51 User Manual, 1994: 5-6)
2.2.4 Register Fungsi Khusus
Register fungsi khusus (Special Fungtion Register, SFR) terletak pada 128 byte
bagian atas memori data internal. Wilayah SFR ini terletak pada 80 H –
FFH. Register-register ini dapat diakses dengan pengalamatan langsung,
baik per bit maupun per byte. Beberapa fungsi SFR yang penting dijelaskan
sebagai berikut:
a. Program Status Word (PSW) terletak pada alamat D0H yang berisi bit status dan
menggambarkan kejadian diakumulator sebelumnya yaitu:
Carry Flag
Carry Flag (CY) mempunyai dua fungsi, untuk fungsi tradisional CY dipakai
untuk operasi matematika. Bit ini akan diset apabila selama proses
penambahan terdapat bawaan (carry out) atau diset jika dalam proses
pengurangan terdapat borrow pada bit 7.
Auxiliary Carry Flag
11
Jika melakukan penambahan angka BCD, maka Auxiliary Carry Flag (ACR)
akan diset jika bawaan dihasilkan dari bit 3 ke bit 4 atau jika hasil dari lower
nible diantara 0AH – 0FH.
Flag 0
Fag 0 (F0) adalah general-purpose flag bit yang tersedia untuk aplikasi
pemakaian.
Register Bank Select Bit
Register Bank Select Bit (RS0-RS1) menunjukkan register bank yang aktif.
Register ini dihapus setelah sistem reset dan untuk mengubahnya harus
melalui software.
Overflow Flag
Overflow Flag (OV) diset jika terdapat Aritmatic Overflow setelah operasi
penambahan atau pengurangan. Software dapat memeriksa bit ini untuk
menentukan apakah hasil terletak pada range yang sebenarnya. Apabila
bilangan tak bertanda ditambahkan, Bit Oferflow Flag bisa diabeikan.
Parity Bit
Bit Paritas (P) secara otomatis diset atau diclear setiap siklus mesin untuk
membentuk paritas genap dengan akumulator. Jumlah bit-bit di dalam
akumulator ditambah bit P yang selalu bernilai genap.
b. Register B
12

Register B terletak pada alamat F0H digunakan bersama-sama dengan
akumulator untuk operasi perkalian dan pembagian. Pada proses perkalian
register ini berisi bilangan kedua yang akan dikalikan dengan bilangan pertama
yang disimpan pada akumulator. Hasil perkalian disimpan pada akumulator (8
byte rendah) dan pada register B (8 byte atas).
c. Stack Pointer
Stack Pointer (SP) adalah register 8 bit yang berada pada alamat 81H. Register
ini berisi alamat yang datanya terletak pada stack teratas. Operasi stack terdiri
dari “pushing” data ke stack dan “popping” data dari stack. Pushing ke stack
akan menaikkan isi register stack pointer sebelum menuliskan data, dan popping
dari stack akan menurunkan isi register stack pointer. Stack pointer berada pada
RAM internal dan pengaksesan dengan cara indirect addressing.
d. Accumulator atau ACC
Accumulator atau ACC beralamat E0H merupakan register untuk operasi
penambahan dan pengurangan. Accumulator ini juga merupakan register serba
guna karena banyak perintah-perintah mikrokontrol yang mengacu dan menuju
ke register ini.
e. Data Pointer (DPTR)
Data pointer beralamat 82H dan 83 H yang merupakan register 16 bit yang
terdiri dari 2 register 8 bit yaitu DPH (byte tinggi) dan DPL (byte rendah). DPTR
berfungsi untuk menyimpan alamat memori eksternal. Karena jumlah bit DPTR
adalah 16, maka DPTR mampu mengalamati memori eksternal sebesar 64 Kbyte.
13

2.1.5 Konfigurasi Pena-pena Mikrokontrol
Mikrokontrol AT89C51 terdiri atas 40 pin, dengan konfigurasi sebagai berikut:
a. Port 0
Port 0 merupakan port dua fungsi yang berada pada pin 32 – 39 dari AT89C51.
Di dalam rancangan sistem sederhana, port ini digunakan sebagai port I/O
serbaguna. Untuk rancangan yang lebih komplek dengan melibatkan memori
eksternal jalur ini dimultiplek untuk bus data dan bus alamat.
Gambar 2.3 Konfigurasi Pena-Pena AT 89C51(sumber : http://www.atmel.com)
b. Port 1
Port 1 disediakan sebagai port I/O dan menempati pin 1 – 8.
c. Port 2
14

Port 2 (pin 21 – 28) berfungsi sebagai I/O serba guna, atau sebagai bus alamat
byte tinggi untuk rancangan yang melibatkan memori eksternal.
d. Port 3
Port 3 adalah port dua fungsi yang berada pada pin 10 – 17, port ini memiliki
multi fungsi, seperti yang terdapat pada tabel berikut ini.
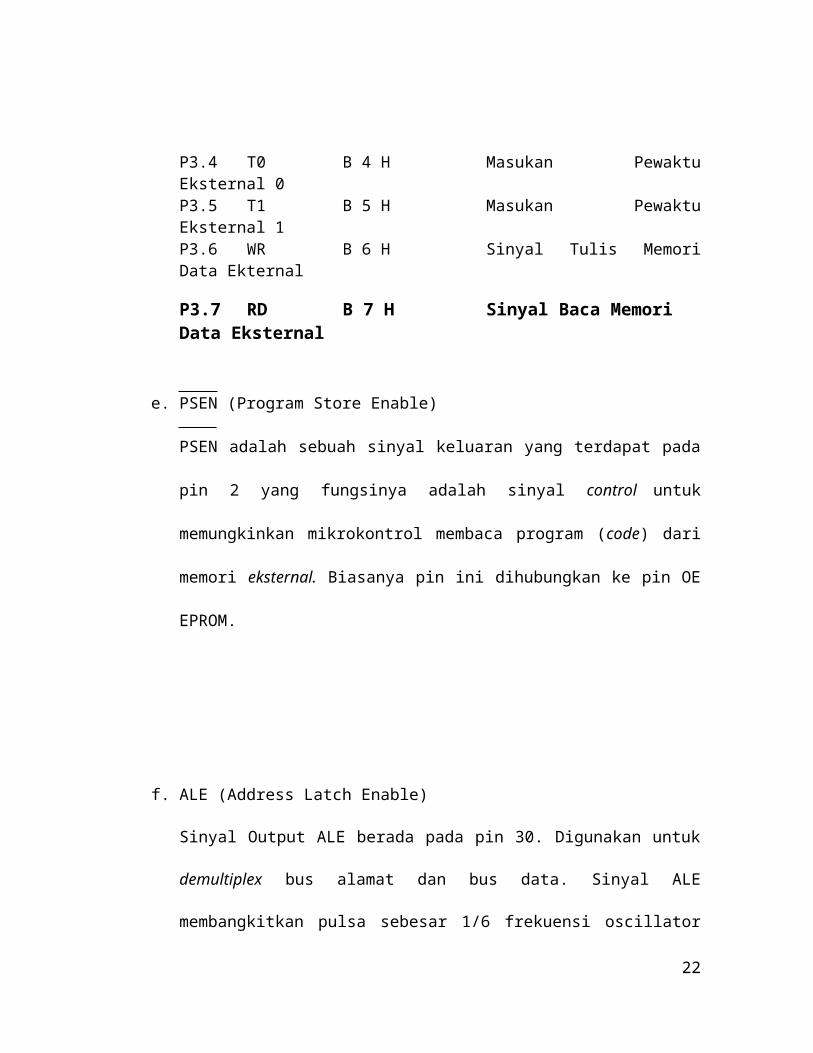
Tabel 2.2 Fungsi Khusus Port 3
BIT NAMA ALAMAT ALTERNATIF FUNGSIP3.0 R x D B 0 H Masukan serialP3.1 T x D B 1 H Keluaran serialP3.2 INT 0 B 2 H Interupsi Eksternal 0P3.3 INT 1 B 3 H Interupsi Eksternal 1P3.4 T0 B 4 H Masukan Pewaktu Eksternal 0P3.5 T1 B 5 H Masukan Pewaktu Eksternal 1P3.6 WR B 6 H Sinyal Tulis Memori Data Ekternal
P3.7 RD B 7 H Sinyal Baca Memori Data Eksternal
e. PSEN (Program Store Enable)
PSEN adalah sebuah sinyal keluaran yang terdapat pada pin 2 yang fungsinya
adalah sinyal control untuk memungkinkan mikrokontrol membaca program
(code) dari memori eksternal. Biasanya pin ini dihubungkan ke pin OE EPROM.
f. ALE (Address Latch Enable)
15

Sinyal Output ALE berada pada pin 30. Digunakan untuk demultiplex bus alamat
dan bus data. Sinyal ALE membangkitkan pulsa sebesar 1/6 frekuensi oscillator
dan dapat dipakai sebagai clock yang dapat digunakan secara umum.
g. EA (External Access)
Masukan sinyal EA terdapat pada pin 31 yang dapat diberikan logika rendah
(ground) atau logika tinggi ( 5volt). Pin EA pada AT89C51 dipakai juga
sebagai tegangan pemrograman EPROM atau Flash Memori Internal.
h. RST (Reset)
Input reset pada pin 6 adalah reset master.
i. Oscillator
Oscilator yang disediakan pada chip dikemudikan dengan X’tal sekitar 12 MHZ.
j. Power
Tegangan Suply +5 volt Vcc yang berada pada pin 40 dan Vss (ground) pada pin
20.
2.1.6 Timer dan Counter
Pada mikrokontrol terdapat dua buah timer atau counter 16 bit yang dapat
diatur melalui perangkat lunak, yaitu: timer atau counter 0 dan timer atau counter 1.
Apabila timer atau counter diaktifkan pada frekuensi kerja mikrokontrol 12 MHZ
maka timer atau counter akan melakukan perhitungan waktu sekali setiap 1
mikrodetik secara independent, tidak tergantung pada pelaksanaan suatu instruksi.
16
Apabila periode waktu telah dilampaui, timer atau counter segera
mengintrupsi mikrokontrol untuk memberitahukan bahwa perhitungan perhitungan
periode waktu telah selesai dilaksanakan. Periode waktu timer atau counter secara
umum ditentukan oleh persamaan :
a. Sebagai timer atau counter 8 bit
T = (255 – TLx) x 1sDimana TLx adalah isi register TL0 atau TL1
b. Sebagai timer atau counter 16 bit
T = (65535 – THx TLx) x 1sDimana THx adalah isi register TH0 atau TH1
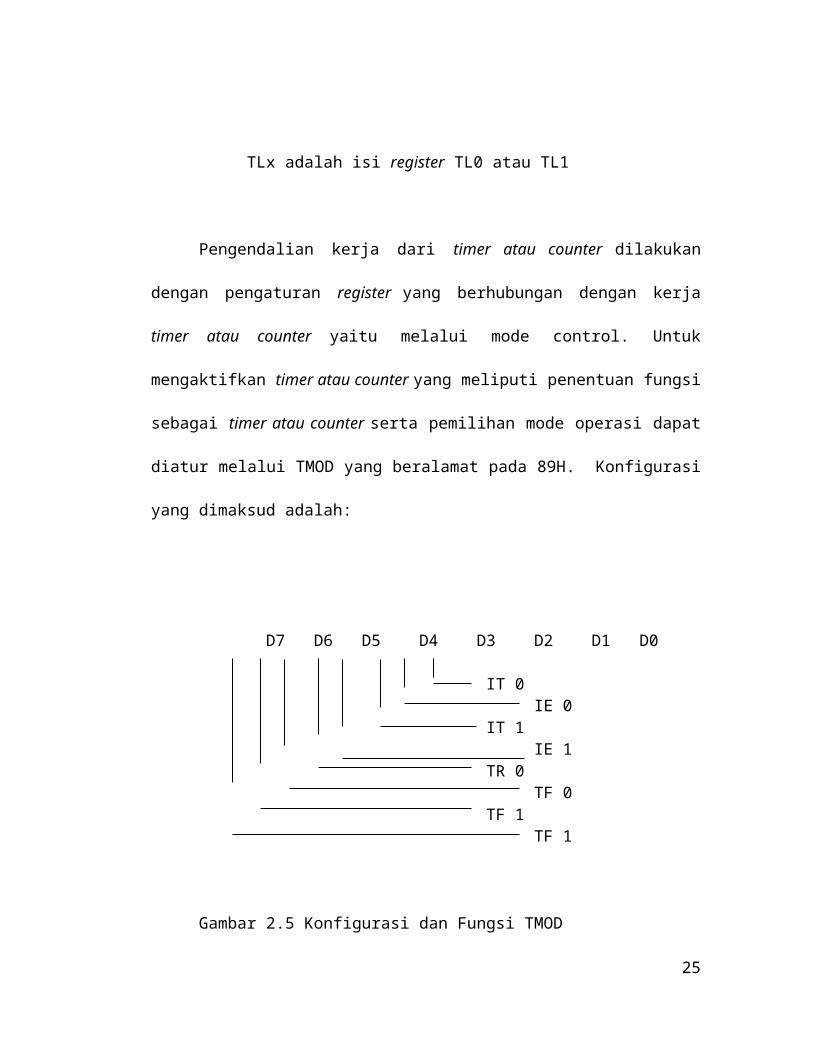
TLx adalah isi register TL0 atau TL1
Pengendalian kerja dari timer atau counter dilakukan dengan pengaturan
register yang berhubungan dengan kerja timer atau counter yaitu melalui mode
control. Untuk mengaktifkan timer atau counter yang meliputi penentuan fungsi
sebagai timer atau counter serta pemilihan mode operasi dapat diatur melalui TMOD
yang beralamat pada 89H. Konfigurasi yang dimaksud adalah:
17

D7 D6 D5 D4 D3 D2 D1 D0
IT 0IE 0
IT 1IE 1
TR 0TF 0
TF 1TF 1
Gambar 2.5 Konfigurasi dan Fungsi TMOD(sumber : Moh Ibnu Malik, Bereksperimen dengan Mikrokontroller 8031)
Keterangan Gambar 2.5
D0 (IT0):Interupt 0 tipe control bit, diatur dengan software untuk
menentukan aktif low atau high triger dari eksternal.
D1 (IE0): Eksternal insterupt 0 edge flag. Di atur melalui hardware ketika
eksternal insterupt teredeteksi dan dinolkan melalui software
ketika insterupt diproses.
D2(IT1): Interrupt 1 tipe control bit, diatur dengan software untuk
menentukan aktif law atau high triger dari eksternal.
D3(IE1): Eksternal Interrupt 1 edge flag. Diatur melalui hardware ketika
eksternal Interrupt terdeteksi dan dinolkan melalui software
ketika interrupt diproses.
D4(TR0): Timer 0 run control bit diatur melalui softwate ketika timer
atau counter 0.
D5(TF0): Timer 0 overflow flag control bit. Diatur melalui software
ketika timer atau counter 0 overflow.
18

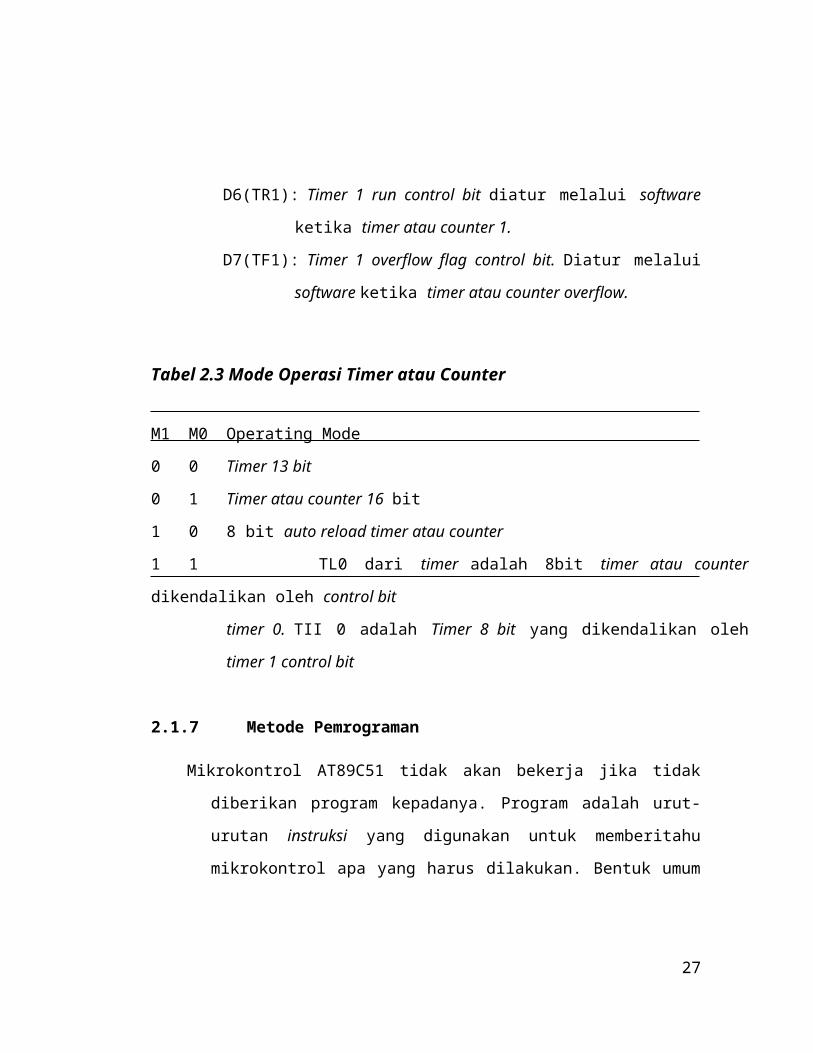
D6(TR1): Timer 1 run control bit diatur melalui software ketika timer
atau counter 1.
D7(TF1): Timer 1 overflow flag control bit. Diatur melalui software ketika
timer atau counter overflow.
Tabel 2.3 Mode Operasi Timer atau Counter
M1 M0 Operating Mode
0 0 Timer 13 bit
0 1 Timer atau counter 16 bit
1 0 8 bit auto reload timer atau counter
1 1 TL0 dari timer adalah 8bit timer atau counter dikendalikan oleh control bit
timer 0. TII 0 adalah Timer 8 bit yang dikendalikan oleh timer 1 control bit
2.1.7 Metode Pemrograman
Mikrokontrol AT89C51 tidak akan bekerja jika tidak diberikan program
kepadanya. Program adalah urut-urutan instruksi yang digunakan untuk
memberitahu mikrokontrol apa yang harus dilakukan. Bentuk umum
instruksi dalam assembler MCS-51 adalah sebagai berikut:
[Label :] Mnemonic[Operand] [,Operand] [,Operand] [Komentar]
Bentuk-bentuk Operand
a. Simbol Assembler Khusus
Assembler telah menyediakan beberapa simbol untuk menunjukkan register
tertentu sebagai operand.
19

Tabel 2.4 Simbol Assembler Khusus
Simbol Keterangan
A AccumulatorR0 – R7 Register serba gunaDPTR Data Pointer, register 16 bit.C Carry FlagAB Accumulator atau register B merupakan pasangan register untuk perkalian
dan pembagianPC Program Conter merupakan register 16 bit yang berisi alamat instruksi
berikutnya yang akan dijalankan.
b. Pengalamatan tak Langsung
Operand pengalamatan tak langsung menunjuk ke sebuah register yang
berisi lokasi alamat memori yang akan digunakan dalam operasi. Lokasi yang
nyata tergantung pada isi register saat instruksi di jalankan. Untuk melaksanakan
pengalamatan tak langsung digunakan simbol @.
MOVX @DPTR,A ;Pindahkan isi akumulator ke memori luar yang
lokasinya ditunjukkan oleh data pointer.
c. Pengalamatan Langsung
Pengalamatan langsung dilakukan dengan memberikan nilai ke suatu register
secara langsung. Untuk melaksanakan hal tersebut digunakan tanda #.
MOV A,#01H ;Isi akumulator dengan bilangan 01H
d. Pengalamatan Bit
Pengalamatan bit adalah menunjukkan alamat lokasi bit baik dalam RAM
internal (byte 32 sampai 47) maupun bit perangkat keras.
Untuk melakukan pengalamatan bit digunakan simbol (.), misalnya
SETB 88H.6 ;Set Bit 6 pada lokasi 88H
20

2.2 Motor Stepper
Motor Stepper berputar berdasarkan langkah dengan derajat tertentu apabila
pada stator dihubungkan catu daya, oleh karena itu motor stepper banyak
digunakan pada peralatan seperti jam, printer, disc drive dan lainya. Motor
Stepper diproduksi dengan kapasitas miliwatt sampai puluhan kilowatt ( JD
Edward, 1993). Motor Stepper termasuk kelompok motor singkron karena
putarannya tergantung urutan arus fasa pada stator.
Dengan belitan fasa stator yang terpisah maka untuk menghasilkan putaran, tiap
belitan diberi catu daya secara berurutan, untuk itu diperlukan rangkaian
kendali untuk menghubungkan belitan stator dengan catu daya secara
berurutan.
Gambar 2.6 Rangkaian Motor Stepper(Sumber : Mikroprosessor intel edisi kelima, Barry B.Brey, 2001)
2.3 Transistor.
Dampak transistor dalam elektronika sangat besar, disamping dimulainya
industri multi bilyun dollar, transistor telah membuka jalan pada penemuan-
penemuan rangkaian terintegrasi, piranti elektronik dan prosesor mikro.
21
N P N
(a)
P N P
(b)
Gambar 2.3 Tiga daerah transistor (a) transistor NPN (b) transistor PNP
Sumber : Malvino, 1984: 103
Gambar diatas akan menunjukkan kristal PNP emiter di-dop sangat banyak,
pekerjaannya mengemisikan atau menginjeksikan elektron kedalam basis-basis di-
dop sedikit dan sangat tipis. Sebagian besar elektron yang diinjeksikan emiter ke
dalam basis menuju ke kolektor. Banyaknya doping pada kolektor adalah diantara
banyaknya doping pada emitor dan basis.
Transistor pada gambar 2.3a mempunyai dua junction, yang satu antara
emiter dan basis dan yang lain antara basis dan kolektor. Kita sebut dioda
sebelah kiri sebagai dioda basis-emiter dan sebelah kanan adalah dioda-basis
kolektor.
Gambar 2.3b menunjukkan kemungkinan yang lain transistor PNP.
Transistor PNP merupakan komplemen dari transistor NPN ini berarti pada
transistor PNP memerlukan arus dan tegangan yang berlawanan dengan NPN.
2.3.1. Resistansi Penyebaran Basis.
Penembusan dua lapis pengosongan pada system basis, hole basis terbatas
pada kanal tipis semi konduktor tipe P. Dengan menaikan bias reserve pada
dioda kolektor (ekivalen dengan menaikkan VCB), memperluas lapisan
pengosongan kolektor, hal ini mengurangi lebar kanal yang berisi hole lebih
sedikit. Resistansi kanal P dalam basis disebut resistansi penyebaran basis r’b.
Arus rekomendasi dalam basis harus mengalir kebawah melalui r’b. Jika ini
terjadi, ia menghasilkan tegangan.
22
2.3.2.Transistor sebagai saklar
Penggunaan transistor sebagai saklar berarti kita mengoperasikan transistor
pada titik sumbat (cut-off) untuk saklar terbuka (open switch) dan pada titik jenuh
(saturation) untuk saklar terbuka (close switch), tetapi tidak pada daerah aktif, untuk
mengetahui operasi transistor ini mari kita perhatikan gambar 2.4 berikut ini.
(a) rangkaian saklar transistor (b) persamaan dengan saklar manual(c) garis beban dc transistor
Gambar 2.4. Saklar Transistor
Sumber : Malvino, 1984
Dari gambar 2.4. kita dapat mengoperasikan transistor pada keadaan tertutup
atau pada keadaan terbuka, untuk mengoperasikan transistor pada keadaan tertutup
maka arus basis (IB) harus sama dengan arus basis saturation (IB(sat)). Rumus untuk
menentukan arus basis adalah :
…………. (1)
23

Jika arus basis (IB) lebih besar dari arus basis saturation (IB(sat)) maka
transistor tetap pada titik jenuh karena arus kolektor tidak dapat bertambah. Untuk
mengoperasikan transistor pada keadaan terbuka maka arus basis paling kecil harus
sama dengan nol.
IB = 0 …………………. (2)
Dari persamaan (1) berati kita menentukan kerja transistor untuk kondisi
tertutup dan dari persamaan (2) kita menentukan kerja transistor untuk kondisi
terbuka. Kondisi tertutup yaitu antara kolektor dan emitor terjadi hubungan
singkat, sedangkan kondisi terbuka yaitu antara kolektor dan emitor tidak terjadi
hubungan singkat. Untuk merancang suatu saklar transistor kita perlu
memperhatikan aturan perancangan yaitu kejenuhan lunak (soft saturation) dan
kejenuhan kasar (hard saturation).
Kejenuhan lunak adalah mengoperasikan transistor pada titik hampir
jenuh. Kondisi ini berarti arus basis hanya cukup untuk mengoperasikan
transistor pada titik atas dari garis beban dc. Dalam operasi transistor sebagai
saklar, kejenuhan lunak tidak dianjurkan.
Kejenuhan keras adalah mengoperasikan transistor pada titik jenuh dimana arus
basis cukup untuk mengoperasikan transistor pada titik jenuh dari semua harga .
…………………… (3)
Pedoman perancangan dari kejenuhan keras yaitu dengan perbandingan arus
kolektor dan arus basis. Perbandingan tersebut adalah 10 : 1, perbandingan ini karena
hampir semua transistor silikon sinyal kecil mempunyai lebih dari 10.
2.3. Motor DC.
24
Montor DC banyak digunakan diberbagai aplikasi terutama bila
dibutuhkan kecepatan putaran yang variable dan torsi yang kuat. Kecepatan
motor DC dapat diatur dengan mengatur tegangan yang dihubungkan
padanya. Arah putaran motor DC dapat diubah dengan membalik polaritas
tegangan masukan.
Bagian penting dari montor DC adalah kumparan dan armature. Armature
adalah bagian yang berputar pada poros dari motor DC. Bagian ini dibentuk dari besi
silinder yang mempunyai celah, kawat dililitkan pada celah-celah tersebut untuk
membentuk kumparan dimana ujung-ujung dari kumparan ini dihubungkan dengan
komparator yang mempunyai batang tembaga yang diisolasi dan dihubungkan pada
poros yang sama.
2.4. Relay.
Relay adalah sebuah saklar magnet, keunggulannya dari saklar mekanik
biasanya adalah relay dapat dipakai dengan aman untuk mengemudikan/ mengontrol
peralatan dari kejauhan. Relay yang bekerja dengan arus dan tegangan yang kecil
dapat menggiatkan mesin yang memerlukan arus besar untuk menstart, juga dapat
untuk menggiatkan dari kejauhan peralatan yang berada ditempat berbahaya.
Pada umumnya relay terdiri atas sebuah elektromagnet dengan inti besi
lunak. Kalau kumparan dialiri arus maka besi lunak menjadi magnet dan
menarik lidah pegas. Lidah ini merupakan salah satu kotak saklar, kalau arus
dimatikan sifat magnet pada besi lunak akan hilang dan lidah dilepaskan hingga
saklar membuka.
BAB III
25

PERENCANAAN DAN PEMBUATAN ALAT
3.1 Pendahuluan
Pada bab ini membahas metodologi perancangan diagram blok, prinsip kerja,
rangkaian sistem otomatisasi kontrol robot yang berbasis mikrokontrol serta
pengujian sistemnya.
3.1.1 Prinsip Kerja Alat
Pembuatan Robot Pengebor PCB ini masih dalam bentuk maket yang masih
sangat sederhana, dengan prisip kerja : Langkah yang pertama adalah
memasukkan dan mengunci PCB yang akan dibor pada papan atau tempat yang
telah disediakan, Langkah yang kedua yaitu memprogram koordinat mana saja
yang akan dibor pada keypad yang telah disediakan (missal : X = 0, Y = 1,
tekan tombol “next” (+) kemudian X = 0, Y = 2, dan seterusnya), Langkah yang
ketiga adalah menyimpan pemrograman koordinat tersebut pada memory
mikrokontroller dengan menekan tombol “save” pada keypad, Langkah yang
keempat adalah menjalankan robot dengan menekan tombol “enter”, kemudian
setelah selesai pengeboran PCB pada lampu indicator akan menyala, setelah
lampu indicator menyala maka langkah yang kelima adalah menekan tombol
“open” pada keypad untuk mengeluarkan PCB dari robot. Pada perencanaan
dan pembuatan peralatan robot pengebor PCB ini digunakan switch sebagai
penempatan mata bor pada posisi koordinat (0,0) pada waktu pertama kali
mengoperasikan robot, satu buah keypad 3x4 tombol sebagai kontrol robot dan
pemrograman koordinat, motor stepper untuk menjalankan robot, empat buah 7
segmen sebagai tampilan koordinat X dan Y. Kesemuannya ini di kontrol oleh
26
single chip mikrokontroller AT 89C51 blok diagram sistem ditunjukkan pada
gambar 3.1. berikut ini
Gambar 3.1. Diagram blok Robot Pengebor PCB(sumber : Perancang)
3.1.2 Perancangan Perangkat Keras
Dengan mengacu pada rangkaian blok diagram pada gambar 3.1 perancangan
dilakukan perbagian untuk mempermudah dalam melakukan pengintegrasian
secara menyeluruh dan mempermudah troble shooting pada saat alat
direalisasikan. Rangkaian keseluruan terdapat pada lampiran .
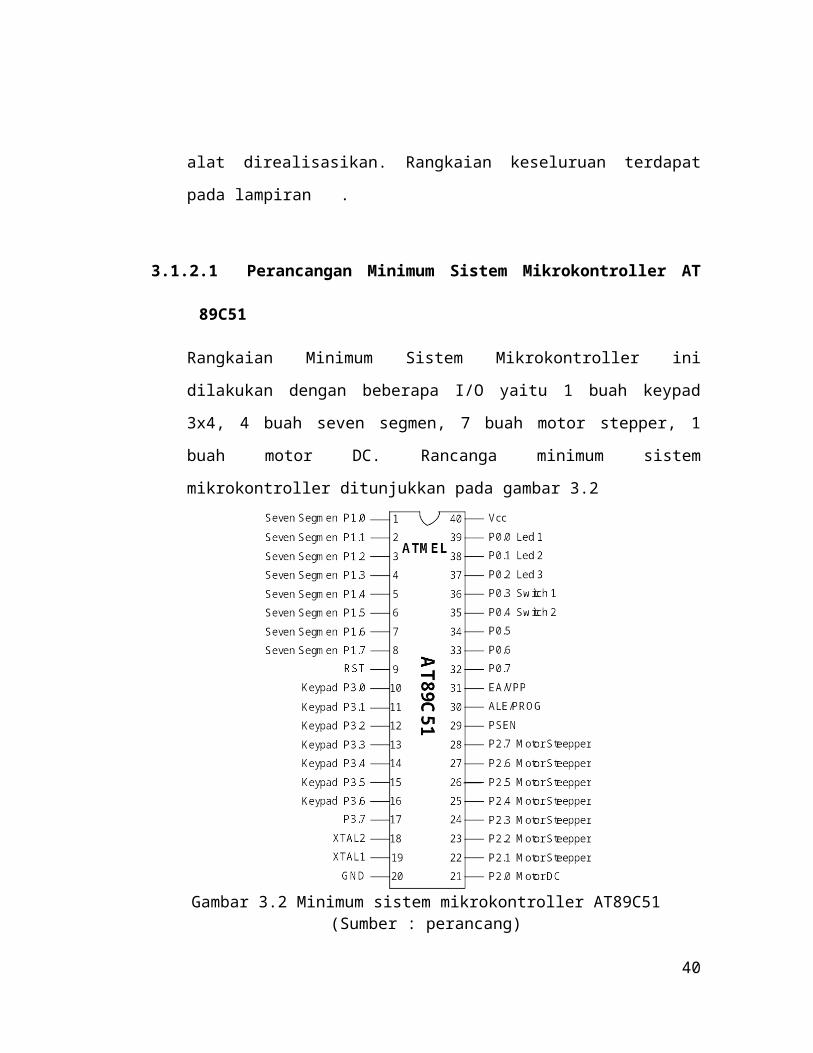
3.1.2.1 Perancangan Minimum Sistem Mikrokontroller AT 89C51
Rangkaian Minimum Sistem Mikrokontroller ini dilakukan dengan beberapa
I/O yaitu 1 buah keypad 3x4, 4 buah seven segmen, 7 buah motor stepper, 1
27
KEYPAD3X4
Switch 1Switch 2
MIKROKON
TROLAT 89C51
Motor BOR
Driver
Motor Steper
Driver
Driver
Motor SteperDriver
Motor Steper
Driver
Driver
DriverMotor Steper
Motor Steper
Motor SteperDriver
Motor Steper
Driver 7 segmen
7 segmen

buah motor DC. Rancanga minimum sistem mikrokontroller ditunjukkan pada
gambar 3.2
Gambar 3.2 Minimum sistem mikrokontroller AT89C51(Sumber : perancang)
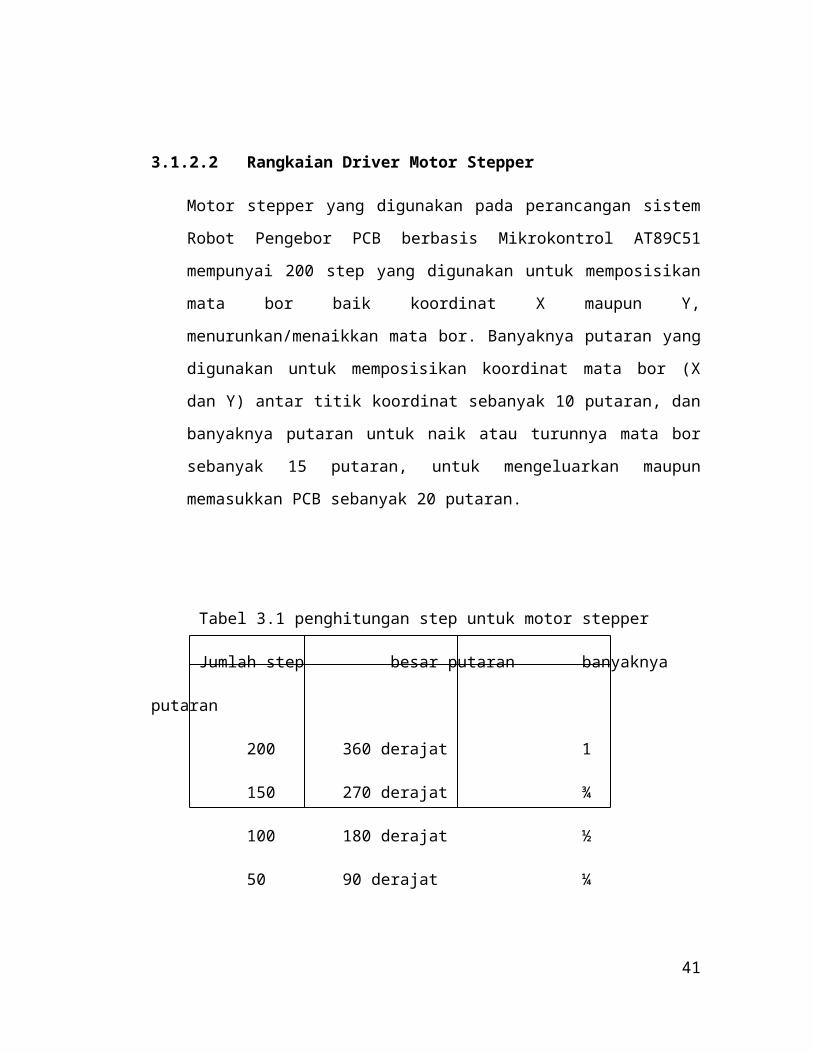
3.1.2.2 Rangkaian Driver Motor Stepper
Motor stepper yang digunakan pada perancangan sistem Robot Pengebor PCB
berbasis Mikrokontrol AT89C51 mempunyai 200 step yang digunakan untuk
memposisikan mata bor baik koordinat X maupun Y, menurunkan/menaikkan
mata bor. Banyaknya putaran yang digunakan untuk memposisikan koordinat
mata bor (X dan Y) antar titik koordinat sebanyak 10 putaran, dan banyaknya
putaran untuk naik atau turunnya mata bor sebanyak 15 putaran, untuk
mengeluarkan maupun memasukkan PCB sebanyak 20 putaran.
28

Tabel 3.1 penghitungan step untuk motor stepper
Jumlah step besar putaran banyaknya putaran
200 360 derajat 1
150 270 derajat ¾
100 180 derajat ½
50 90 derajat ¼
Pengendalian motor stepper kesemuannya dikendalikan oleh
software
Driver motor stepper terdiri dari 2 buah transistor yaitu C945 dan D400 serta
sebuah dioda sebagai pengembali tegangan transient dari motor stepper.
Rangkaian driver motor stepper sebagaimana ditunjukkan pada gambar 3.3
Gambar 3.3 rangkaian driver motor stepper(sumber : Hafindo Education)
29

Nilai dari R1,R2, dan R3 dapat ditentukan dengan mengetahui Iob (arus output
Mikrokontroller) yaitu sebesar 25 ma.
Prinsip kerja dari rangkaian driver motor stepper yaitu ketika input driver
berlogika 1 menyebabkan tr1 berposisi on sehingga Vce = 0 maka tr2 mengalami cut
off sehingga motor tidak berputar. Dan sebaliknya jika tr1 berlogika 0 maka tr2 akan
berposisi menghantar sehingga menyebabkan motor berputar.
3.1.2.3. Rangkaian Catu Daya.
Rangkaian Robot Pengebor PCB membutuhkan tegangan catu daya sebesar 5
volt digunakan untuk menggerakkan IC mikrokontroler dan rangkaian seven segmen,
sedangkan catu daya 12 volt digunakan untuk menggerakkan beban yaitu motor
stepper dan motor DC. Rangkaian catu daya ini dibentuk oleh dua buah regulator LM
7812 untuk menghasilkan tergangan 12 volt dan LM 7805 yang menghasilkan
tegangan 5 volt untuk lebih jelasnya dapat dilihat dibawah ini.
30

Gambar 3.4 Rangkaian Catu Daya(sumber: perancang)
3.2 Perancangan dan Pembuatan Perangkat Lunak (Sofware).
Perangkat lunak merupakan faktor yang penting didalam perancangan alat
menggunakan mikrokontroler karena tanpa adanya perangkat lunak perangkat keras
(hardware) tidak akan bisa berjalan sesuai dengan yang diharapkan, jadi yang
menjadi kunci utama dalam suatu alat yang menggunakan mikrokontroler adalah
software karena software seperti otak yang akan memberi perintah atau intruksi untuk
dijalankan.
Perangkat lunak yang dibuat menggunakan bahasa assembly MCS.51 karena
AT89C51 masih termasuk dalam keluarga besar MCS.51. Untuk mempermudah
dalam membuat program maka perlu dibuat suatu diagram alir (flow chart) dari
program yang akan dibuat.
3.3. Perancangan Robot
31
Perancangan robot ini menggunakan aluminium dengan panjang 50 cm dan
lebar 50 cm serta tinggi 50 cm, led indikator tombol on, keypad, 4 buah seven
segmen, 7 buah motor stepper, 1 buah motor DC, catu daya listrik, lebih
lengkapnya terlihat pada lampiran.
3.4. Perancangan Pengujian Rangkaian
Pengujian sistem ini dilakukan dalam dua tahap, tahab I dilakukan terhadap
perangkat keras pada masing-masing blok rangkaian. Penyusun sistem antara
lain rangkaian seven segmen, rangkaian pengendali motor dan pengujian sistem
tahap II dilakukan secara menyeluruh.
3.4.1. Pengujian Seven Segmen
3.4.1.1. Tujuan Pengujian
Pengujian dilakukan untuk mengetahui apakah rangkaian seven segmen dapat
menampilkan karakter. Pengujian dilakukan dengan menghubungkan common seven
segmen dengan tegangan +5V.
3.4.1.2. Alat Penguji
a. Power suplay 5 volt
b. Driver seven segmen.
c. Seven segmen
3.4.1.3. Metode Pengujian
32

a. Menyusun rangkaian penguji seperti gambar 3.5 berikut dan pastikan catu
daya 5 volt
b. Masukkan hasilnya kedalam tabel 4.1
Gambar 3.5 Metodologi pengujian seven segmen(sumber: perancang)
3.4.2. Pengujian Motor Stepper
3.4.2.1. Tujuan Pengujian
Pengujian motor stepper ini bermaksud untuk mengetahui apakah motor stepper
dapat bergerak sesuai dengan yang direncanakan atau tidak, dengan dikontrol
langsung melalui mikrokontroller, sehingga perancang dapat menyesuaikan
programnya sesuai yang dibutuhkan.
3.4.2.2. Alat penguji
a. Power suplay 5 dan 12 volt
b. Rangkaian driver motor
c. Motor stepper
d. Mikro yang berisi perancangan program motor stepper yang dapat dilihat
pada lampiran
3.4.2.3. Metodologi Pengujian
a. Menyusun rangkaian sesuai dengan 3.6
33
Mikrokontroller AT 89C51
DRIVER
SEVENSEGMEN

b. Masukkan hasilnya kedalam tabel 4.2
Gambar 3.6 Metodologi pengujian motor stepper(sumber: perancang)
3.4.3. Pengujian Keseluruan Sistem
3.4.3.1. Tujuan Pengujian
Tujuan pengujian keseluruhan sistem adalah untuk mengetahui prinsip kerja
sistem, setelah perangkat keras dan perangkat lunaknya diintegrasikan bersama-
sama. Pengujian sistem secara keseluruhan diuji diatas beberapa tahab
berdasarkan input yang diterima oleh mikrokontroller dan dikeluarkan
outputnya berupa memutar motor stepper yaitu memasukkan dan mengeluarkan
PCB dari robot, memposisikan mata bor pada koordinat X dan Y, menampilkan
karakter pada seven segmen, dan menghidupkan atau mematikan motor bor.
3.4.3.2. Alat Penguji
a. Power suplay 5 volt dan 12 volt
b. Perangkat keras beserta input dan outputnya
c. Perangkat lunak yang telah diintegrasikan kedalam mikrokontroller
3.4.3.3. Metodologi Pengujian
a. Susun semua rangkaian menjadi satu sistem
b. Aktifkan power suplay
34
Mikrokontroller AT 89C51
DRIVER
MOTOR
MOTOR STEPPER

c. Masukkan data pada keypad yang telah disediakan.
d. Tekan tombol save untuk menyimpan data yang telah dimasukkan.
e. Tekan tombol finish untuk menjalankan robot.
f. Amati jalannya robot
g. Catat hasilnya di tabel 4.3
35

BAB IV
HASIL DAN ANALISA
4.1 Hasil Pengujian
4.1.1 Hasil Pengujian Seven Segmen
Tabel 4.1 Hasil Pengujian Seven Segmen
Data Masukan Seven SegmenKeterangan
D C B A
1
1
1
1
1
1
1
1
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
Mati
Angka 1
Angka 2
Angka 3Angka 4
Angka 5Angka 6
Angka 7
Angka 8
Angka 9
Angka 0
36

4.1.2 Hasil Pengujian Motor Stepper
Tabel 4.2 Hasil Pengujian Motor Stepper
Isi R0Arah Putaran Keadaan Motor
200
150
100
50
200
150
100
50
Putar Kanan
Putar Kanan
Putar Kanan
Putar Kanan
Putar Kiri
Putar Kiri
Putar Kiri
Putar Kiri
motor berputar ke kanan sebesar 360
Motor berputar kekanan sebesar 270
Motor berputar kekanan sebesar 180
Motor berputar kekanan sebesar 90
Motor berputar Kekiri sebesar 360
Motor berputar kekiri sebesar 270
Motor berputar kekiri sebesar 180
Motor berputar kekiri sebesa 90
.
4.1.3 Hasil Pengujian Keseluruhan Sistem
Tabel 4.7 Hasil Pengujian Keseluruhan Sistem
Input yang Aktif 7 Segmen M1&M2 M3&M4 M5&M6 M7 Keterangan
Power Supply
Tombol Start
Input data
-
√
√
-
-
-
-
-
-
-
-
-
-
-
-
Indikator Menyala
Tombol Ditekan
Koordinat X Dan Y
37

Tombol enter √ √ √ √ √ Exekusi program
4.2 Analisa Hasil Pengujian
4.2.1 Analisa Hasil Pengujian Seven Segmen
Dari hasil pengujian seven segmen, pada tabel 4.1
memperlihatkan bahwa ketika ada data masukan maka
seven segmen bisa menampilkan karakter, dan rangkaian
ini bekerja apabila diberi masukan rendah (active low). dari
keadaan ini perancang dapat mengambil kesimpulan bahwa
seven segmen sudah sesuai dengan perencanaan.
4.2.2 Analisa Hasil Pengujia Motor Stepper
Dari tabel 4.2 dapat disimpulkan bahwa driver motor stepper dapat berfungsi
sesuai rancangan. Sebab jika R0 (register 0 yang berisi banyaknya putaran
motor pada program) di isi dengan 2000 dengan arah kanan, dan 2000 dengan
arah kiri maka motor stepper akan berputar sebanyak 10 putaran. Putaran ini di
perlukan untuk memposisikan koordinat X dan Y antar lubang PCB. Dan jika
R0 di isi dengan 10.000 maka motor stepper akan berputar sebanyak 100
putaran baik kearah kanan maupun kearah kiri sesuai dengan subrutin program
yang dijalankan. Demikian juga untuk menaikkan dan menurunkan mata bor
diperlukan pengisian yang berbeda-beda sesuai dengan yang dibutuhkan, Untuk
menaikkan maupun menurunkan mata bor membutuhkan putaran sebanyak 20
putaran, sedangkan untuk memasukkan dan mengeluarkan PCB dari robot
membutuhkan putaran sebanyak 100 putaran.
38

4.2.3 Analisa Hasil Pengujian Keseluruhan Sistem
Dari pengujian sistem secara keseluruhan dapat dianalisa bahwa sistem dapat
bekerja sesuai dengan perancangan awal hal ini terbukti dengan input dan outputnya
yang sesuai, yaitu:
a. Ketika power suplay aktif maka mikrokontroller akan mengalami reset hal ini
terlihat dengan tidak adanya perintah yang dilakukan oleh mikrokontroller.
b. Jika ada data masukan dari keypad yang berupa data koordinat X dan Y, maka
perintah dilanjutkan ke tombol “save” untuk menyimpan program, setelah itu
tombol “enter” di aktifkan maka robot akan dijalankan.
c. Ketika Robot sedang dijalankan, maka led indicator “proses” akan menyala, dan
apabila di tombol “pause” maka robot akan berhenti, dan setelah di tombol
“play” maka robot akan bekerja lagi, setelah selesai pengeboran maka led
indicator “finish” akan menyala.
d. Selesai dilakukan pengeboran PCB maka PCB dikeluarkan dari robot dengan
menekan tombol “open”.
39
BAB V
PENUTUP
5.1 Pendahuluan
Kesimpulan dan saran yang dapat disajikan dari perencanaan, pembuatan, dan
pengujian Robot Pengebor PCB Berbasis Mikrokontroller AT89C51 adalah
sebagai berikut:
5.1.1 Kesimpulan
Penyusun skripsi ini setelah melalui tahap perencanaan dan pembuatan
rangkaian, dilanjutkan ke tahap pengujian rangkaian. Dalam pengujian tersebut
disusun metode-metode pengujian yang dapat memberikan gambaran tetang
prinsip kerja Robot Robot Pengebor PCB. Setelah melalui tahap pengujian
diperoleh beberapa kesimpulan sebagai berikut:
a. Dari pengujian sistem keseluruhan, sistem menunjukkan bahwa sistem dapat
bekerja sesuai dengan perencanaan, robot mampu melakukan tugasnya untuk
mengebor PCB, hanya ada kelemahan yaitu mengenai mekanik yang tidak
mampu untuk bertahan lama jika digunakan secara terus menerus.
b. Peletakkan switch haruslah tepat pada tempat yang akurat guna pendeteksian
tempat pemberhentian mata bor.
c. Robot Pengebor PCB ini dapat digunakan untuk tugas lain selain mengebor PCB,
tentunya dengan sedikit penyesuaian di hardware maupun softwarenya.
d. Sistem kerja robot ini membutuhkan waktu beberapa detik dalam satu siklus
kerjanya.
40
5.1.2 Saran
Dengan melihat hasil yang dicapai dalam perancangan dan kesimpulan yang
ada, untuk mengembangkan lebih lanjut disarankan:
a. Penambahan indikator yang menyatakan pekerjaan yang sedang dilakukan oleh
robot.
b. Perlu diperbaiki dari pada sistem mekaniknya.
c. Perlu dilakukan perubahan dalam rangka untuk mempercepat dari pada sistem
kerja robot.
41