ROBOT PEMOTONG KUKU OTOMATIS DENGAN METODE...
68
ROBOT PEMOTONG KUKU OTOMATIS DENGAN METODE QUICK RETURN MECHANISM BERBASIS ARDUINO (Ujicoba Panti Jompo Karmilus) Oleh: Muhammad Rifky 11150910000024 PROGRAM STUDI TEKNIK INFORMATIKA FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH JAKARTA 2019 M / 1441 H
Transcript of ROBOT PEMOTONG KUKU OTOMATIS DENGAN METODE...

ROBOT PEMOTONG KUKU OTOMATIS
DENGAN METODE QUICK RETURN MECHANISM
BERBASIS ARDUINO
(Ujicoba Panti Jompo Karmilus)
Oleh:
Muhammad Rifky
11150910000024
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH
JAKARTA
2019 M / 1441 H

ROBOT PEMOTONG KUKU OTOMATIS
DENGAN METODE QUICK RETURN MECHANISM
BERBASIS ARDUINO
(Ujicoba Panti Jompo Karmilus)
SKRIPSI
Sebagai Salah Satu Syarat Untuk Memperoleh Gelar
Sarjana Komputer
Fakultas Sains dan Teknologi
Universitas Islam Negeri Syarif Hidayatullah Jakarta
Oleh :
Muhammad Rifky
11150910000024
PROGRAM STUDI TEKNIK INFORMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS ISLAM NEGERI SYARIF HIDAYATULLAH
JAKARTA
2019 M / 1441 H

LEMBAR PERSETUJUAN
ROBOT PEMOTONG KUKU OTOMATIS
DENGAN METODE QUICK RETURN MECHANISM
BERBASIS ARDUINO
(Ujicoba Panti Jompo Karmilus)
Skripsi
Sebagai Salah Satu Syarat untuk
Memperoleh Gelar Sarjana Komputer (S.Kom)
Oleh:
Muhammad Rifky
11150910000024
Menyetujui,
Pembimbing I
Nenny Anggraini, MT
NIDN. 0310097604
Pembimbing II
Nashrul Hakiem, Ph.D
NIP. 19710608 200501 1 005
Mengetahui,
Ketua Program Studi Teknik Informatika
Dr. Imam Marzuki Shofi, MT
NIP. 19720205 200801 1 010


iii
PERNYATAAN ORISINALITAS
DENGAN INI SAYA MENYATAKAN BAHWA SKRIPSI INI BENAR-
BENAR HASIL KARYA SENDIRI YANG BELUM PERNAH DIAJUKAN
SEBAGAI SKRIPSI ATAU KARYA ILMIAH PADA PERGURUAN TINGGI
ATAU LEMBAGA MANAPUN.
Jakarta, November 2019
Muhammad Rifky
11150910000024

iv
PERNYATAAN PERSETUJUAN PUBLIKASI SKRIPSI
Sebagai civitas akademik UIN Syarif Hidayatullah Jakarta, saya yang bertanda tangan
dibawah ini:
Nama : Muhammad Rifky
NIM : 11150910000024
Program Studi : Teknik Informatika
Fakultas : Sains Dan Teknologi
Jenis Karya : Skripsi
demi pengembangan ilmu pengetahuan, menyetujui untuk memberikan kepada Universitas
Islam Negeri Syarif Hidayatullah Jakarta Hak Bebas Royalti Noneksklusif (Non-exclusive
Royalty Free Right) atas karya ilmiah saya yang berjudul:
ROBOT PEMOTONG KUKU OTOMATIS
DENGAN METODE QUICK RETURN MECHANISM
BERBASIS ARDUINO
(Ujicoba Panti Jompo Karmilus)
beserta perangkat yang ada (jika diperlukan). Dengan Hak Bebas Royalti Noneksklusif ini
Universitas Islam Negeri Syarif Hidayatullah Jakarta berhak menyimpan, mengalih
media/formatkan, mengelola dalam bentuk pangkalan data (database), merawat dan
mempublikasikan tugas akhir saya selama tetap mencantumkan nama saya sebagai
penulis/pencipta dan sebagai pemilik Hak.
Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di : Jakarta
Pada tanggal : 2019
Yang menyatakan
(Muhammad Rifky)

v
Penulis : Muhammad Rifky (11150910000024)
Program Studi : Teknik Informatika
Judul : ROBOT PEMOTONG KUKU OTOMATIS DENGAN METODE
QUICK RETURN MECHANISM BERBASIS ARDUINO (Ujicoba
Panti Jompo Karmilus)
ABSTRAK
Lanjut usia merupakan individu yang berusia di atas 60 tahun yang pada
umumnya memiliki tanda-tanda terjadinya penurunan fungsi-fungsi biologis,
psikologis, sosial, dan ekonomi. Lansia pada umumnya tinggal bersama dengan
keluarga, namun tidak sedikit lansia yang tinggal di panti jompo. Kesehatan para
lansia sangat penting, salah satunya kebersihan kuku. Para lansia di Panti Jompo
Karmilus memiliki kesulitan dalam memotong kuku sendiri dikarenakan penurunan
fungsi tubuh, seperti penglihatan yang menurun dan tangan yang tremor sehingga
perlu dibantu oleh penanggung jawab. Dalam penelitian ini dikembangkan robot
pemotong kuku yang dapat bekerja secara otomatis agar lansia dapat memotong
kuku sendiri. Alat ini menggunakan Arduino Uno sebagai media pemrosesan, push
button sebagai aktivator, LED sebagai penanda dan motor servo sebagai penggerak.
Pada penelitian ini menggunakan metode Quick Return Mechanism yang mengubah
gerakan memutar menjadi linier. Penelitian ini menggunakan tahapan – tahapan
metode prototipe. Berdasarkan hasil pengujian tingkat user, persentase tingkat
kesesuaian alat ini dengan pengguna adalah 100%.
Kata Kunci : lanjut usia, memotong kuku, , Arduino Uno, push button, LED,
motor servo, Quick Return Mechanism
Daftar Pustaka : 12 Jurnal, 2 Buku, 3 Website
Jumlah Halaman : 53 halaman + xiii halaman

vi
Author : Muhammad Rifky (11150910000024)
Study program : Informatics Engineering
Title : AUTOMATIC NAIL CUTTING ROBOT WITH QUICK RETURN
MECHANISM METHODS USING ARDUINO (Trial at Karmilus
Nursing Home)
ABSTRACT
The elderly are individuals over the age of 60 who generally have signs of a
decline in biological, psychological, social and economic functions. Elderly
generally live together with family, but not a few elderly who live in nursing homes.
The health of the elderly is very important, one of which is nail hygiene. The elderly
at Karmilus Nursing Home have difficulty cutting their own nails due to decreased
bodily functions, such as decreased vision and tremor in their hands, so they need
to be assisted by a person in charge. In this research, a robot nail cutter was
developed which could work automatically so that the elderly could cut their own
nails. This tool uses Arduino Uno as processing media, push buttons as activators,
LEDs as markers and servo motors as movers. In this study using the Quick Return
Mechanism method that changes the motion to rotate into linear. This research uses
prototype method stages. Based on testing, the percentage level of compatibility of
this tool with users is 100%.
Keyword : elderly, cutting nail, , Arduino Uno, push button, LED,
servo motor, Quick Return Mechanism
References : 12 Journals, 2 Books, 3 Websites
Number of Pages : 53 pages + xiii pages

vii
KATA PENGANTAR
Assalamu’alaikum Wr. Wb.
Puji syukur senantiasa dipanjatkan kehadirat Allah SWT yang telah
melimpahkan rahmat, hidayah serta nikmat-Nya sehingga penyusunan skripsi ini
dapat diselesaikan. Sholawat dan salam senantiasa dihaturkan kepada junjungan
kita baginda Nabi Muhammad SAW beserta keluarganya, para sahabatnya serta
umatnya hingga akhir zaman. Penulisan skripsi ini mengambil tema dengan judul:
ROBOT PEMOTONG KUKU OTOMATIS DENGAN METODE
QUICK RETURN MECHANISM BERBASIS ARDUINO (UJICOBA PANTI
JOMPO KARMILUS)
Penyusunan skripsi ini adalah salah satu syarat untuk memperoleh gelar
Sarjana Komputer (S.Kom) pada program studi Teknik Informatika, Fakultas Sains
dan Teknologi, Universitas Islam Negeri Syarif Hidayatullah Jakarta. Adapun
bahan penulisan skripsi ini adalah berdasarkan hasil penelitian, pengembangan
aplikasi, kuesioner, wawancara dan beberapa sumber literatur.
Dalam penyusunan skripsi ini, telah banyak bimbingan dan bantuan yang
didapatkan dari berbagai pihak sehingga skripsi ini dapat berjalan dengan lancar.
Oleh karena itu, penulis ingin mengucapkan banyak terima kasih kepada :
1. Prof. Dr, Lily Suraya Eka Putri, M.Env.Stud, selaku dekan Fakultas Sains
dan Teknologi.
2. Dr. Imam Marzuki Shofi, MT, selaku Ketua Program Studi Teknik
Informatika.
3. Ibu Nenny Anggraini, MT. dan Pak Nashrul Hakiem, Ph.D. selaku Dosen
Pembimbing I dan II yang senantiasa meluangkan waktu dan memberikan
bimbingan, bantuan, semangat dan motivasi dalam menyelesaikan skripsi
ini.

viii
4. Seluruh dosen dan staff UIN Jakarta, khususnya Fakultas Sains dan
Teknologi yang telah memberikan ilmu dan pengalaman yang berharga.
5. Keluarga tercinta, Ayahanda Henky dan Ibunda Henny yang tidak henti-
hentinya mendoakan, mencurahkan kasih sayang serta memberikan
motivasi dan dukungan baik moril maupun materi selama ini. Kakak -kakak
tersayang Dita dan Angga. yang senantiasa memberikan semangat dan
motivasi kepada penulis.
6. Sahabat penulis, khususnya: Muqtarizal, Mahfudz, Fahmi, Taufik, Faisal,
Shofan, Bagus, Daffa, Ilham yang telah membantu mengerjakan skripsi ini,
dan teman-teman kelas TIA, terimakasih atas kesediaannya menciptakan
momen-momen berharga Bersama; Teman-teman seangkatan dan
seperjuangan TI UIN 2015, kawan-kawan HIMTI 2018, terima kasih atas
semua kenangan yang telah diciptakan bersama selama perkuliahan dan
tetap semangat.
7. Seluruh pihak yang tidak dapat disebutkan satu persatu yang secara
langsung maupun tidak langsung telah membantu dalam menyelesaikan
skripsi ini.
Penulisan skripsi ini masih jauh dari kata sempurna. Untuk itu, sangat
diperlukan kritik dan saran yang membangun bagi penulis. Akhir kata,
semoga laporan skripsi ini dapat bermanfaat bagi penulis dan orang lain.
Wassalamualaikum, Wr. Wb.
Jakarta, November 2019
Penulis

ix
DAFTAR ISI
PERNYATAAN ORISINALITAS ........................................................................ iii
PERNYATAAN PERSETUJUAN PUBLIKASI SKRIPSI .................................. iv
ABSTRAK .............................................................................................................. v
ABSTRACT ............................................................................................................. vi
KATA PENGANTAR .......................................................................................... vii
DAFTAR ISI .......................................................................................................... ix
DAFTAR GAMBAR ............................................................................................ xii
DAFTAR TABEL ................................................................................................ xiii
BAB 1 PENDAHULUAN ..................................................................................... 1
Latar Belakang ......................................................................................... 1
Rumusan Masalah .................................................................................... 3
Batasan Masalah ....................................................................................... 3
Tujuan Penelitian ...................................................................................... 4
Manfaat Penelitian .................................................................................... 4
Metodologi Penelitian .............................................................................. 5
1.6.1 Metode Pengumpulan Data ............................................................... 5
1.6.2 Metode Pengembangan Sistem ......................................................... 5
Sistematika Penulisan ............................................................................... 5
BAB II LANDASAN TEORI ............................................................................... 7
Robot ........................................................................................................ 7
Pemotong Kuku ........................................................................................ 7
Metode Quick Return Mechanism ............................................................ 8
Mikrokontroler Arduino Uno ................................................................... 9
Modul Motor Servo ................................................................................ 11
Modul Push Button ................................................................................. 12
Modul LED ............................................................................................. 13
Prototipe ................................................................................................. 13
2.8.1 Karakteristik Metode Prototyping .................................................. 15
2.8.2 Jenis-Jenis Prototyping ................................................................... 15

x
2.8.3 Keunggulan dan Kelemahan Metode Prototyping .......................... 15
Blackbox Testing .................................................................................... 16
Metode Pengumpulan data ..................................................................... 16
2.10.1 Studi pustaka ................................................................................... 16
2.10.2 Wawancara ...................................................................................... 16
BAB III METODOLOGI PENELITIAN ......................................................... 18
Metode Pengumpulan Data .................................................................... 18
3.1.1 Data Primer ..................................................................................... 18
3.1.2 Data Sekunder ................................................................................. 20
Metode Pengembangan Sistem Prototipe ............................................... 20
Alur Penelitian ........................................................................................ 24
BAB IV ANALISIS, PERANCANGAN SISTEM, IMPLEMENTASI DAN
PENGUJIAN SISTEM ....................................................................................... 25
Tahap Komunikasi ................................................................................. 25
Tahap Pengumpulan Kebutuhan............................................................. 25
4.2.1 Mendefinisikan Ruang Lingkup ...................................................... 26
4.2.2 Analisis Sistem Berjalan ................................................................. 26
4.2.3 Desain Sistem Usulan ..................................................................... 27
4.2.4 Analisis Kebutuhan Perangkat Keras .............................................. 28
4.2.5 Analisis Kebutuhan Perangkat Lunak ............................................. 29
Tahap Membangun Sistem ..................................................................... 30
4.3.1 Skematik Sistem Arduino dengan Push Button .............................. 31
4.3.2 Skematik Sistem Arduino dengan Motor Servo.............................. 32
4.3.3 Skematik Sistem Arduino dengan LED .......................................... 32
4.3.4 Skematik Quick Return Mechanism ................................................ 34
4.3.5 Pembangunan Pemotong Kuku Otomatis ....................................... 35
Tahap Mengkodekan Sistem .................................................................. 35
4.4.1 Pengkodean Arduino ....................................................................... 36
4.4.2 Pengkodean Push Button dengan Motor Servo dan LED ............... 36
Tahap Menguji Sistem ............................................................................ 38
4.5.1 User Aceptance Test ........................................................................ 38

xi
4.5.2 Performance Testing ....................................................................... 39
BAB V HASIL DAN PEMBAHASAN .............................................................. 42
Robot Pemotong Kuku Otomatis ........................................................... 42
Hasil Pengujian Sistem ........................................................................... 42
Hasil pengujian tingkat user ................................................................... 44
BAB VI KESIMPULAN DAN SARAN............................................................. 46
Kesimpulan ............................................................................................. 46
Saran ....................................................................................................... 46
DAFTAR PUSTAKA .......................................................................................... 47
DAFTAR LAMPIRAN ....................................................................................... 49

xii
DAFTAR GAMBAR
Gambar 2.1 Quick Return Mechanism .................................................................... 8
Gambar 2.2 Mikrokontroler Arduino Uno 328 ..................................................... 10
Gambar 2.3 Modul Servo Tipe MG996R ............................................................. 12
Gambar 2.4 Wiring Push Button ........................................................................... 12
Gambar 2.5 Saklar Push Button ............................................................................ 13
Gambar 2.6 LED ................................................................................................... 13
Gambar 2.7 Paradigma Prototyping ...................................................................... 14
Gambar 3.1 Kerangka Berpikir ............................................................................. 24
Gambar 4.1 Sistem berjalan .................................................................................. 27
Gambar 4.2 Sistem Usulan .................................................................................... 28
Gambar 4.3 Cara Kerja Sistem ............................................................................. 30
Gambar 4.4 Skematik Arduino dengan Push Button ............................................ 31
Gambar 4.5 Skematik Arduino dengan Motor Servo............................................ 32
Gambar 4.6 Skematik Arduino dengan LED ........................................................ 33
Gambar 4.7 Skematik Quick Return Mechanism .................................................. 34
Gambar 4.8 Pembangunan Pemotong Kuku Otomatis ......................................... 35
Gambar 5.1 Tingkat Keberhasilan LED................................................................ 42
Gambar 5.2 Pengaruh Tegangan Terhadap Response Time Push Button ............. 43
Gambar 5.3 Pengaruh Tegangan Terhadap Response Time Motor Servo ............ 44

xiii
DAFTAR TABEL
Tabel 3.1 Studi literature ....................................................................................... 19
Tabel 4.1 Kebutuhan perangkat keras ................................................................... 29
Tabel 4.2 Analisis Kebutuhan Software dan Tools ............................................... 29
Tabel 4.3 Pin Push Button ..................................................................................... 31
Tabel 4.4 Pin konfigurasi Motor Servo ................................................................. 32
Tabel 4.5 Pin konfigurasi LED ............................................................................. 33
Tabel 4.6 UAT-01 Pemotong Kuku Otomatis ...................................................... 39
Tabel 4.7 Uji coba keberhasilan LED ................................................................... 40
Tabel 4.8 Uji waktu respon Push Button .............................................................. 40
Tabel 4.9 Uji Waktu Respon Motor Servo............................................................ 41
Tabel 5.1 Hasil UAT ............................................................................................. 45

1
1 BAB I
PENDAHULUAN
Latar Belakang
Lanjut usia merupakan individu yang berusia di atas 60 tahun yang pada
umumnya memiliki tanda-tanda terjadinya penurunan fungsi-fungsi biologis,
psikologis, sosial, dan ekonomi. Proses penuaan penduduk tentunya berdampak
pada berbagai aspek kehidupan, baik sosial, ekonomi, dan terutama kesehatan,
karena dengan semakin bertambahnya usia, fungsi organ tubuh akan semakin
menurun baik karena faktor alamiah maupun karena penyakit (Aisyah & Hidir,
2014).
Perubahan-perubahan akan terjadi pada tubuh manusia sejalan dengan
makin meningkatnya usia. Perubahan tubuh terjadi sejak awal kehidupan
hingga usia lanjut pada semua organ dan jaringan tubuh. Masa lansia sering
dimaknai sebagai masa kemunduran, terutama pada fungsi-fungsi fisik dan
psikologis. Hurlock (1994) mengemukakan bahwa penyebab kemunduran fisik
ini merupakan suatu perubahan pada sel-sel tubuh bukan karena penyakit
khusus tetapi karena proses menua. Menurut Nursari dan Fitriyani (2002)
seorang lansia akan mengalami kendala atau ketidakmampuan untuk
melakukan sesuatu, berarti tidak mampu melakukan aktivitas sehari-hari tanpa
bantuan orang lain, baik sebagian dibantu (ketergantungan ringan atau sedang)
maupun ketergantungan seluruhnya (ketergantungan total atau berat) (Permana,
Sumarwati, & Rosyadi, 2009).
Lansia pada umumnya tinggal bersama dengan keluarga, namun tidak
sedikit lansia yang tinggal di panti jompo. Panti jompo merupakan tempat
berkumpulnya orang – orang lanjut usia yang baik secara sukarela ataupun
diserahkan oleh pihak keluarga untuk diurus segala keperluannya, dimana
tempat ini ada yang dikelola oleh pemerintah maupun pihak swasta. Penulis
melakukan penelitian di Panti Kompo Karmilus yang terletak di Bogor. Panti
Jompo tersebut telah berdiri sejak tahun 1997, yang hanya merawat lansia
wanita.

2
UIN SYARIF HIDAYATULLAH JAKARTA
Penulis melakukan wawancara kepada penanggung jawab panti jompo
Karmilus, yaitu Victoria Wanitania, para lansia di panti jompo tersebut
berjumlah 5 orang wanita, dengan usia 70 tahun keatas. Faktor usia tersebut
menyebabkan terjadinya penurunan fungsi – fungsi fisik, diantaranya
penurunan fungsi penglihatan dan juga tangan yang tremor. Faktor – faktor
tersebut menyebabkan para lansia kesulitan untuk melakukan aktivitas sehari –
hari, salah satunya dalam hal memotong kuku, sehingga perlu dibantu oleh
pengurus panti jompo.
Sekarang ini, apabila ingin memotong kuku masih menggunakan gunting
kuku manual yang tentu saja membuat lansia mengalami kesulitan dikarenakan
faktor – faktor yang sudah disebutkan. Berdasarkan hal tersebut dibutuhkan
sebuah alat yang dapat memotong kuku secara otomatis agar lansia dapat
memotong kukunya sendiri.
Terdapat beberapa penelitian yang berkaitan pemotong otomatis, seperti
pada penelitian (Wahyu Kusuma Raharja & Suhilman, 2017), dihasilkan sebuah
pemotong kabel otomatis, yang dapat bekerja berdasar panjang dan jumlah
potongan sesuai kebutuhan pengguna, ukuran yang dapat dipilih 5 cm, 10 cm,
15 cm, 20 cm, dan 25cm, untuk input menggunakan keypad, dan untuk
penggerak pemotong menggunakan motor servo. Selanjutnya pada penelitian
(Wakil, Ch, & Ariessaputra, 2018), menghasilkan alat pemotong bolu otomatis
berbasis mikrokontroler arduino, dalam proses pemotongannya menggunakan
metode quick return mechanism. Menggunakan motor servo sebagai penggerak
pemotong, alat tersebut dapat memotong bolu dengan variasi jumlah potongan
menjadi 4, 8, 12, 20 bagian. Penelitian tentang pemotong otomatis, rata – rata
menggunakan Arduino sebagai otak pemrosesanm, metode Quick Return
Mechanism sebagai proses pemotongannya ,dan motor servo sebagai penggerak
pemotongnya menggunakan motor servo.
Quick Return Mechanism merupakan metode yang mengubah gerak
memutar menjadi gerak bolak-balik linier yang berbeda untuk kedua gaya
dorongnya (Wakil et al., 2018). Metode tersebut sangat cocok untuk

3
UIN SYARIF HIDAYATULLAH JAKARTA
diimplementasikan pada alat yang akan dibuat karena mengubah gerakan
memutar motor servo menjadi gerakan bolak – balik linear gunting kuku.
Banyak cara untuk membuat sebuah robot dengan mudah, salah satunya
adalah dengan menggunakan alat yang dinamakan arduino. Selama bertahun-
tahun arduino telah menjadi otak dari ribuan proyek, dari benda yang dipakai
sehari-hari sampai instrumen ilmiah yang kompleks. Arduino dibuat di Ivrea
Interantion Design Intitute sebagai alat yang mudah untuk membuat prototype
yang cepat. Board Arduino merupakan sebuah open-source sehingga kita dapat
secara independen membangun sesuatu dengan kebutuhan masing-masing
(Arduino, 2016).
Skripsi ini diusulkan sebuah alat/robot yang dapat memotong kuku
secara otomatis yang dapat digunakan lansia secara mandiri. Dengan demikian
penulis melakukan penelitian berjudul “ROBOT PEMOTONG KUKU
OTOMATIS DENGAN METODE QUICK RETURN MECHANISM
BERBASIS ARDUINO “.
Rumusan Masalah
Berdasarkan dari latar belakang tersebut, maka dapat dirumuskan
permasalahan dalam skripsi ini yaitu “Bagaimana membuat robot pemotong
kuku otomatis dengan metode quick return mechanism berbasis arduino?”
Batasan Masalah
Berdasarkan rumusan masalah yang sudah didapat, maka penulis
membatasi penulisan skripsi ini antara lain pada :
1. Peneliti menggunakan komputer mini arduino uno sebagai otak utama
untuk pengendalian dan koneksi antar alat.
2. Menggunakan push button untuk input.
3. Menggunakan motor servo sebagai penggerak gunting kuku.
4. Menggunakan LED sebagai penanda bahwa pemotong kuku bergerak.
5. Menggunakan gunting kuku sebagai pemotong.
6. Menggunakan metode pengembangan sistem prototipe.

4
UIN SYARIF HIDAYATULLAH JAKARTA
7. Menggunakan metode pengujian user acceptance test dan performance
testing.
Tujuan Penelitian
Berdasarkan uraian di atas, maka tujuan penulisan skripsi ini adalah
membuat robot pemotong kuku otomatis dengan metode quick return
mechanisme berbasis arduino.
Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah sebagai berikut :
Bagi Penulis :
1. Menerapkan ilmu – ilmu yang diperoleh selama masa kuliah.
2. Memperdalam dan memahami ilmu tentang Quick Return
Mechanism serta menerapkannya dalam kehidupan nyata.
3. Menambah wawasan mengenai pengaplikasian embedded system
dengan menggunakan mikrokontroler arduino.
Bagi Universitas
1. Mengetahui kemampuan mahasiswa dalam menguasai teori yang
telah diperoleh selama kuliah.
2. Mengetahui kemampuan mahasiswa dalam menerapkan ilmunya dan
sebagai bahan evaluasi.
3. Memberikan gambaran kepada mahasiswa sebagai upaya
berkontribusi menghadapi dunia kerja.
4. Memberikan kontribusi sosial secara nyata yang bisa diperuntukan
bagi masyarakat luas.
Bagi Lansia :
Dapat memotong kuku secara mandiri.

5
UIN SYARIF HIDAYATULLAH JAKARTA
Metodologi Penelitian
Metode yang digunakan penulis pada penelitian ini dibagi menjadi dua,
yaitu metode pengumpulan data dan metode pengembangan. Berikut penjelasan
kedua metode tersebut:
1.6.1 Metode Pengumpulan Data
Dalam melakukan analisis data dan penulisan skripsi ini, penulis
menggunakan 2 metode pengumpulan data, yaitu:
1. Studi Literatur.
2. Wawancara.
1.6.2 Metode Pengembangan Sistem
Penulis pada penelitian ini menggunkan metode prototyping
(prototype). Ada lima tahap pengembangan prototype adalah sebagai
berikut:
1) Tahap Komunikasi.
2) Tahap Pengumpulan Kebutuhan.
3) Tahap Membangun Sistem .
4) Tahap Mengkodekan Sistem.
5) Tahap Menguji Sistem.
Sistematika Penulisan
Untuk memudahkan dalam penulisan skripsi, penulis menyusunnya ke
dalam enam bab. Setiap bab-nya terdiri dari beberapa subbab tersendiri. Bab
tersebut secara keseluruhan saling berkaitan satu sama lain, diawali dengan
bab pendahuluan dan diakhiri bab penutup yang berisi kesimpulan dan saran.
Secara singkat akan diuraikan sebagai berikut:
BAB I: PENDAHULUAN
Dalam bab ini akan dibahas mengenai latar belakang, batasan
masalah, tujuan, dan manfaat serta sistematika penulisan.

6
UIN SYARIF HIDAYATULLAH JAKARTA
BAB II: LANDASAN TEORI
Dalam bab ini akan dibahas mengenai berbagai teori yang
mendasari analisis permasalahan dan berhubungan dengan topik
yang dibahas.
BAB III: METODOLOGI PENELITIAN
Bab ini membahas mengenai metode penelitian yang akan
digunakan dalam merancang dan membangun prototipe sistem.
BAB IV: ANALISIS, PERANCANGAN SISTEM, IMPLEMENTASI
DAN PENGUJIAN SISTEM
Pada bab ini membahas mengenai hasil dari analisis, perancangan,
implementasi sesuai dengan metode yang dilakukan pada alat yang
dibuat serta hasil dari pengujian.
BAB V: HASIL DAN PEMBAHASAN
Bab ini berisi hasil dan pembahasan yang didapat dari penelitian.
BAB VI: PENUTUP
Bab ini berisi tentang kesimpulan dari penelitian yang telah
dilakukan dan saran yang diusulkan untuk pengembangan lebih
lanjut agar tercapai hasil yang lebih baik.

7
2 BAB II
LANDASAN TEORI
Robot
Robot adalah manipulator multifungsi yang dapat diprogram ulang yang
dirancang untuk memindahkan material, bagian, alat, atau perangkat khusus
melalui gerakan terprogram variabel untuk kinerja berbagai tugas (Kumar, 2017).
Sebuah robot memiliki sifat-sifat atau karakteristik sebagai berikut (Siswaja,
2016):
1. Sebuah robot tidaklah alami, merupakan hasil rekaan.
2. Dapat merasakan kondisi lingkungannya.
3. Dapat memanipulasi benda-benda yang berada di lingkungannya.
4. Memiliki tingkat kecerdasan tertentu, mampu membuat keputusan
berdasarkan lingkungannya, terkontrol secara otomatis (preprogrammed
sequence).
5. Dapat diprogram.
6. Dapat bergerak dengan satu atau lebih aksis untuk berputar dan berpindah.
7. Dapat membuat pergerakan yang terkoordinasi dengan baik.
Pemotong Kuku
Pemotong kuku adalah alat yang digunakan untuk menggunting kuku yang
tumbuh. Biasanya terbuat dari bahan stainless steel, plastik, maupun aluminium.
Alat yang banyak digunakan menggunakan prinsip tumpuan maupun pengungkit.
Hampir semua jenis gunting kuku yang diproduksi memiliki kikir untuk
membersihkan dan mengasah kuku setelah dipotong (Kosasih, 2017).
Pemotong kuku memiliki fungsi untuk memotong kuku jari tangan dan kaki
yang tumbuh terlalu panjang. Kuku yang tumbuh terlalu panjang memiliki dampak
merugikan dari segi kesehatan. Bagian bawah kuku yang terlalu panjang dapat
menjadi sarang kuman. Hal ini terjadi karena tangan manusia adalah bagian tubuh
yang paling banyak bersentuhan dengan permukaan lain dalam melaksanakan
aktivitas sehari-hari. Apabila kuku terlalu panjang, sisa-sisa permukaan yang
kontak dengan tangan dapat terperangkap di sela antara kuku dan kulit ujung jari.

8
UIN SYARIF HIDAYATULLAH JAKARTA
Selanjutnya apabila tidak dibersihkan akan membuat kuman yang ada didalamnya
tumbuh dan menginfeksi jaringan kulit yang ada disekitarnya (Kosasih, 2017).
Untuk menghindari kuku tumbuh ke dalam, memotong kuku sebaiknya tepat
di atas kulit atau sedikit dilebihkan. Pastikan panjang kuku tidak lebih dari ujung
jari tempat kuku tersebut tumbuh (Kosasih, 2017).
Untuk mendapatkan bentuk yang halus, potong kuku dalam satu arah sampai
rata dan sedikit membulat di sudut-sudut (jangan gunakan kikir sebagai pengganti
gunting kuku untuk memperpendek kuku, gunakan hanya setelah memotong
dengan gunting kuku) (Kosasih, 2017).
Metode Quick Return Mechanism
Quick Return Mechanism adalah mekanisme yang mengubah gerak memutar
menjadi gerak bolak-balik linier yang berbeda untuk kedua gaya dorongnya. Pada
saat alat ini mendorong pada sisi yang berlawanan waktu yang dibutuhkan akan
lebih lama dari pada waktu saat alat itu kembali ke sisi yang lain, inilah yang disebut
dengan mekanisme pengembalian cepat. Alat ini menghasilkan peningkatan yang
signifikan pada produktivitas permesinan yang saat ini banyak digunakan pada
peralatan mesin, misalnya, mesin pembentuk, gergaji listrik, dan aplikasi lain yang
memerlukan kerja dorong dengan waktu menunggu yang intensif, dan
pengembalian dengan waktu menunggu yang tidak intensif (Wakil et al., 2018).
Gambar 2.1 Quick Return Mechanism
(Sumber: Pinterest.com)

9
UIN SYARIF HIDAYATULLAH JAKARTA
Mikrokontroler Arduino Uno
Mikrokontroler adalah sistem mikroprosesor lengkap yang terkandung di
dalam sebuah chip. Mikrokontroler berbeda dari mikroprosesor serbaguna yang
digunakan dalam sebuah PC, karena sebuah mikrokontroler umumnya telah berisi
komponen pendukung sistem minimal mikroprosesor, yakni memori dan
pemrograman Input-Output. Mikrokontroler dapat diprogram untuk melakukan
penghitungan, menerima input dan menghasilkan output. Mikrokontroler
mengandung sebuah inti prosessor, memori dan pemrograman Input-Output
(Martinus, 2013).
Arduino Uno dikatakan sebagai sebuah platform dari physical computing
yang bersifat open source. Pertama-tama perlu dipahami bahwa kata “platform” di
sini adalah sebuah pilihan kata yang tepat (Martinus, 2013).
Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi ia adalah
kombinasi dari hardware, bahasa pemrograman dan Integrated Development
Environment (IDE) (Martinus, 2013).
IDE adalah sebuah software yang sangat berperan untuk menulis program,
meng-compile menjadi kode biner dan meng-upload ke dalam memory
microcontroller. Ada banyak projek dan alat-alat dikembangkan oleh akademisi
dan profesional dengan menggunakan Arduino, selain itu juga ada banyak modul-
modul pendukung (sensor, tampilan, penggerak dan sebagainya) yang dibuat oleh
pihak lain untuk bisa disambungkan dengan Arduino. Arduino berevolusi menjadi
sebuah platform karena ia menjadi pilihan dan acuan bagi banyak praktisi. Salah
satu yang membuat Arduino banyak digunakan orang adalah karena sifatnya yang
open source, baik untuk hardware maupun software-nya (Martinus, 2013).
Diagram rangkaian elektronik Arduino digratiskan kepada semua orang.
Anda bisa bebas men-download gambarnya, membeli komponen-komponennya,
membuat PCB-nya dan merangkainya sendiri tanpa harus membayar kepada para
pembuat Arduino. Sama halnya dengan IDE Arduino yang bisa di-download dan
diinstal pada komputer secara gratis (Martinus, 2013).
Berikut merupakan gambar mikrokontroler Arduino Uno:

10
UIN SYARIF HIDAYATULLAH JAKARTA
(Sumber : https://www.arduino.cc/en/Main/Board)
Berikut merupakan spesifikasi teknis mikrokontroler Arduino Uno 328:
Tabel 2.1 Spesifikasi Teknis Arduino Uno 328
Chip mikrokontroller Uno328
Tegangan operasi 5V
Tegangan input (yang
direkomendasikan, via jack DC)
7V - 12V
Tegangan input (limit, via jack DC) 6V - 20V
Digital I/O pin 14 buah, 6 di antaranya
menyediakan PWM output
Analog Input pin 6 buah
Arus DC per pin I/O 50 mA
Arus DC pin 3.3V 50 mA
Memori Flash 32 KB, 0,5 KB telah digunakan
untuk bootloader
Gambar 2.2 Mikrokontroler Arduino Uno 328

11
UIN SYARIF HIDAYATULLAH JAKARTA
SRAM 2 KB
EEPROM 1 KB
Clock speed 16 Mhz
Dimensi 2,7 inci x 2,1 inci
Modul Motor Servo
Motor servo adalah sebuah perangkat yang dirancang dengan sistem kontrol
umpan balik loop tertutup (servo), sehingga dapat diatur untuk menentukan dan
memastikan posisi sudut dari poros output motor. Motor servo terdiri dari beberapa
bagian, yaitu motor DC, serangkaian gear, rangkaian kontrol dan potensiometer.
Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran
poros dan meningkatkan torsi motor servo, sedangkan potensiometer berfungsi
sebagai penentu batas posisi putaran poros motor servo (Latifa & Saputro, 2018).
Servo Motor memiliki beberapa tipe salah satunya adalah Motor Servo
MG996R, dengan spesifikasi sebagai berikut (Latifa & Saputro, 2018):
a. Dimensi: 40,719,742,9 mm
b. Berat : 9 g (hanya motor)
c. Kecepatan reaksi : 0,20 detik / 60 derajat (4,8 V tanpa beban)
d. Stall torque: 9,4 kg/cm (4.8v); 11kg/cm (6v)
e. Suhu kerja : 0-55 C
f. Dead band width : 1 µs (mikro detik)
g. Tegangan kerja : 4,8 – 6,6 V
h. Material gear : Metal
i. Mode : Analog
j. Panjang kabel : 32 cm

12
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 2.3 Modul Servo Tipe MG996R
(Sumber : Latifa & Saputro, 2018)
Modul Push Button
Push Button merupakan alat elektronika yang berfungsi untuk
menghubungkan dan memutuskan dua titik atau lebih dalam suatu rangkaian
elektronika. Salah satu jenis saklar adalah saklar Push button yaitu saklar yang
hanya akan menghubungkan dua titik atau lebih pada saat tombolnya ditekan dan
pada saat tombolnya tidak ditekan maka akan memutuskan dua titik atau lebih
dalam suatu rangkaian elektronika. Wiring dan bentuk saklar Push button
ditunjukan pada gambar berikut (Herlan, 2015).
Gambar 2.4 Wiring Push Button

13
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 2.5 Saklar Push Button
(sumber: http://elektronika-dasar.web.id/komponen/limit-switch-dan-saklarpush-
on/)
Modul LED
LED adalah alat elektronika yang dapat memancarkan cahaya monokromatik
saat diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari
bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED
tergantung pada jenis bahan semikonduktor yang digunakannya.
(Teknikelektronika.com, 2019).
Gambar 2.6 LED
(sumber: jaykar.com.au)
Prototipe
Menurut Houde dan Hill dalam bukunya “What do Prototypes Prototypes?”
terbitan USA: Apple Computer.Inc Prototyping merupakan salah satu metode
pengembangan perangkat lunak yang banyak digunakan. Dengan metode
Prototyping ini pengembang dan pelanggan dapat saling berinteraksi selama proses
pembuatan sistem. Sering terjadi seorang pelanggan hanya mendefiinisikan secara

14
UIN SYARIF HIDAYATULLAH JAKARTA
umum apa yang dikehendakinya tanpa menyebutkan secara detail output apa saja
yang dibutuhkan, pemrosesan dan data-data apa saja yang dibutuhkan (Pressman &
R.MAXIM, 2015).
Untuk mengatasi ketidaksesuaian antara pelanggan dan pengembang, maka
dibutuhkan kerja sama yang baik di antara keduanya sehingga pengembang akan
mengetahui dengan benar apa yang diinginkan pelanggan dengan tidak
mengesampingkan segi-segi teknis dan pelanggan akan mengetahui proses-proses
dalam menyelesaikan sistem yang diinginkan. Dengan demikian akan
menghasilkan sistem yang sesuai dengan jadwal waktu penyelesaian yang telah
ditentukan (Pressman & R.MAXIM, 2015).
Prototyping merupakan pendekatan iteratif dalam pengembangan sistem
yang dibuat. Secara umum tujuan pengembangan sistem informasi adalah untuk
memberikan kemudahan dalam penyimpanan informasi, mengurangi biaya dan
menghemat waktu, meningkatkan pengedalian, mendorong pertumbuhan,
meningkatkan produktifitas serta profitabilitas organisasi. Dalam beberapa tahun
terakhir ini, peningkatan produktifitas organisasi ini dibantu dengan
berkembangnya teknologi komputer baik hardware maupun software-nya
(Pressman & R.MAXIM, 2015).
Istilah prototyping dalam hubungannya dengan pengembangan software
sistem informasi lebih merupakan suatu proses bukan prototipe sebagai suatu
produk (Pressman & R.MAXIM, 2015).
Gambar 2.7 Paradigma Prototyping
(Sumber: Pressman, 2015)

15
UIN SYARIF HIDAYATULLAH JAKARTA
2.8.1 Karakteristik Metode Prototyping
Empat langkah yang menjadi karakteristik metode prototyping
masih menurut Houde dan Hill dalam bukunya “What do Prototypes
Prototypes?” terbitan USA : Apple Computer,Inc yaitu (Houde & Hill,
2014):
1. Pemilahan fungsi harus mengacu pada fungsi yang ditampilkan
oleh prototyping. Pemilahan dilakukan berdasarkan pada tugas-
tugas yang relevan yang sesuai dengan contoh kasus yang akan
diperagakan.
2. Penyusunan sistem informasi bertujuan untuk memenuhi
permintaan akan tersedianya prototipe.
3. Evaluasi.
4. Penggunaan Selanjutnya.
2.8.2 Jenis-Jenis Prototyping
Berikut adalah jenis-jenis dari Prototyping (Houde & Hill, 2014):
1. Feasibility prototyping – digunakan untuk menguji kelayakan
dari teknologi yang akan digunakan untuk sistem informasi yang
akan disusun.
2. Requirement prototyping – digunakan untuk mengetahui
kebutuhan aktivitas bisnis user.
3. Desain prototyping – digunakan untuk mendorong perancangan
sistem informasi yang akan digunakan.
4. Implementation prototyping – merupakan lanjutan dari
rancangan protipe, dimana prototipe ini langsung disusun
sebagai suatu sistem informasi yang akan digunakan.
2.8.3 Keunggulan dan Kelemahan Metode Prototyping
Segala sesuatu memiliki keunggulan dan kelemahan, begitu pula
dengan metode prototyping yang memiliki keunggulan dan kelemahan,
berikut penjelasannya (Houde & Hill, 2014):
A. Keunggulan

16
UIN SYARIF HIDAYATULLAH JAKARTA
1. End user dapat berpartisipasi aktif.
2. Penentuan kebutuhan lebih mudah diwujudkan.
3. Mempersingkat waktu pengembangan sistem informasi.
B. Kelemahan
1. Proses analisis dan perancangan terlalu singkat.
2. Mengesampingkan alternatif pemecahan masalah.
3. Kurang fleksibel dalam menghadapi perubahan.
4. Prototipe yang dihasilkan tidak selamanya mudah diubah.
Blackbox Testing
Black box testing merupakan pengujian yang terfokus pada apakah unit
program memenuhi kebutuhan (requirement) yang disebutkan dalam spesifikasi.
Pada black box testing, cara pengujian dilakukan dengan menjalankan atau
mengeksekusi unit atau modul, kemudian diamati apakah hasil dari unit itu sesuai
dengan proses bisnis yang diinginkan (Muslihudin & Oktafianto, 2016).
Metode Pengumpulan data
2.10.1 Studi pustaka
Studi pustaka adalah menganalisis secara kritis pustaka penelitian
yang ada saat ini. Studi pustaka tersebut perlu dilakukan secara ketat dan
harus mengandung keseimbangan antara uraian deskriptif dan analisis.
Identifikasi kekuatan dan kelemahan pustaka tersebut dengan menelaah hasil
atau temuan penelitian tersebut, metodologi yang digunakan, serta bagaimana
hasil temuan tersebut dibandingkan penelitian atau publikasi lainnya
(Sudaryono, Gaguk, & Wardani, 2011).
2.10.2 Wawancara
Wawancara adalah suatu cara pengumpulan data yang digunakan
untuk memperoleh informasi langsung dari sumbernya. Wawancara
digunakan bila ingin mengetahui hal-hal dari responden secara lebih
mendalam serta jumlah responden sedikit. Wawancara atau interview
merupakan salah satu bentuk teknik pengumpulan data yang banyak

17
UIN SYARIF HIDAYATULLAH JAKARTA
digunakan dalam penelitian deskriptif kualitatif dan deskriptif kuantitatif.
Wawancara dilaksanakan secara lisan dalam pertemuan tatap muka secara
individu. Adakalanya pula, wawancara dilakukan secara kelompok kalau
memang tujuannya menghimpun data dari kelompok seperti wawancara
dengan suatau keluarga, pengurus yayasan, pembina pramuka, dan lain
sebagainya (Sudaryono et al., 2011).

18
3 BAB III
METODOLOGI PENELITIAN
Sebelum memulai penelitian, penulis melakukan proses pengumpulan data
dengan menggunakan metode pengumpulan data berupa wawancara dan studi
pustaka. Setelah mendapatkan data yang telah diperlukan untuk proses penelitian
selanjutnya penulis memulai penelitian dengan menggunakan metode
pengembangan sistem yaitu prototipe. Dimana peneliti memulai dengan
menentukan tujuan dari keseluruhan alat yang akan dibuat berdasarkan latar
belakang yang ada, dan mengidentifikasi apa saja yang akan dibutuhkan.
Selanjutnya melakukan pemodelan berupa fungsi-fungsi apa saja yang akan
berjalan yang nantinya diwujudkan dalam sebuah alat berupa prototipe. Langkah
setelah itu penulis akan melakukan testing terhadap prototipe yang hasilnya akan
digunakan untuk dievaluasi.
Metode Pengumpulan Data
Metode pengumpulan data digunakan untuk mencari dan
mengumpulkan data yang terkait dengan peneltian atau proses analisis seperti
dasar teori, metodologi penulisan, metodologi proses, dan acuan penelitian
sejenis. Dalam penelitian ini, metode pengumpulan data yang dilakukan
adalah wawancara, studi pustaka, dan studi literatur.
3.1.1 Data Primer
3.1.1.1 Studi Lapangan
1. Wawancara
Wawancara dilakukan untuk mengetahui kendala yang dimiliki
lansia dalam memotong kukunya dan bagaimana mereka
memotong kukunya. Adapun wawancara dilakukan terhadap Ibu
Victoria Wanitania selaku penanggung jawab di panti jompo
Karmilus.

19
UIN SYARIF HIDAYATULLAH JAKARTA
2. Studi Literatur
Penulis melakukan perbandingan antara penelitian yang sudah
pernah dilakukan. berikut adalah hasil dari perbandingan.
Tabel 3.1 Studi literature
No. Judul Penelitian Kekurangan Kelebihan Hasil
1. Purwarupa Alat
Pemotong Kabel
Otomatis Berdasar
Panjang dan
Jumlah Potongan
Berbasis Arduino
(2017)
-Delay waktu
menyebabkan hasil
Panjang kabel
kurang tepat.
-Terkadang kondisi
kabel melengkung
sehingga
pemotongan
kurang presisi.
-Menggunakan
input keypad,
berhasil memotong
sesuai jumlah yang
diinginkan.
- presentase
kesalahan
pemotongan yang
relative kecil.
Alat pemotong
kabel otomatis
yang berdasar
pada panjang
dan jumlah
potongan.
2. Rancang Bangun
Alat Pemotong
Kue Bolu Dengan
Metode Quick
Return Mechanism
Berbasis Arduino
UNO ATMEGA
328P (2016)
Hasil potongan
kurang maksimal
karena komponen
alat kurang presisi
Waktu pemotongan
relatif cepat
Alat Pemotong
Kue Bolu
Otomatis.
3. Development and
Designing of
Automatic Wire
Cutting System
using
Microcontroller
(2017)
-Karena sumber
daya kecil, alat
tidak bisa bekerja
lama.
- Menggunakan
sumber daya kecil
- dapat memotong
Panjang kabel
sesuai yang
diinginkan melalui
input keypad
Alat Pemotong
Kabel
Otomatis.

20
UIN SYARIF HIDAYATULLAH JAKARTA
3.1.2 Data Sekunder
3.1.2.1 Studi Literatur
Pada tahapan pengumpulan data dengan cara studi
pustaka, penulis mencari referensi-referensi yang relevan dengan
objek yang akan diteliti. Pencarian referensi dilakukan di
perpustakaan, toko buku, maupun secara online melalui internet.
Data tersebut menjadi latar belakang permasalahan yang ada saat
ini untuk diselesaikan dalam penelitian. Setelah mendapatkan
referensi yang relevan dengan topik penelitian, penulis mencari
berbagai informasi yang dibutuhkan dalam penelitian. Informasi
tersebut digunakan dalam penyusunan landasan teori, metodologi
penelitian serta pembuatan prototipe secara langsung. Referensi
yang dijadikan acuan dapat dilihat di daftar pustaka.
Studi literatur sejenis merupakan kegiatan mencari
literatur yang mempunyai persamaan atau keterkaitan dengan
penelitian yang sedang dilakukan. Literatur sejenis yang didapatkan
berupa penulisan skripsi dan juga jurnal, yang kemudian ditelaah
dan dibuat perbandingan sehingga penelitian ini dapat menjadi
pelengkap atau penyempurnaan dari penelitian-penelitian yang
sudah dilakukan sebelumnya.
Metode Pengembangan Sistem Prototipe
Dalam pengembangan sistem ini, digunakan metodologi
pengembangan sistem dengan metode Prototyping. Ada 5 tahapan
prototyping yang digunakan dalam metode prototyping yaitu (Pressman &
R.MAXIM, 2015) :
1) Tahap Komunikasi.
2) Tahap Pengumpulan Kebutuhan.
3) Tahap Membangun Sistem.
4) Tahap Mengkodekan Sistem.
5) Tahap Menguji Sistem.

21
UIN SYARIF HIDAYATULLAH JAKARTA
Pada penelitian ini penulis menggunakan metode prototipe untuk
membuat robot gunting kuku otomatis menggunakan Arduino. Alasan
penulis menggunakan metode ini karena cocok dalam pengembangan
sebuah alat dalam waktu pengerjaan yang singkat.
Model prototipe dimulai dari mengumpulkan kebutuhan pelanggan
terhadap alat yang akan dibuat. Lalu dibuatlah program prototipe agar
pelanggan lebih terbayang dengan apa yang sebenarnya diinginkan.
Program prototipe biasanya merupakan program yang belum jadi. Program
ini biasanya menyediakan tampilan dengan simulasi alur alat yang dibuat
sehingga tampak seperti alat yang sudah jadi. Program prototipe ini
dievaluasi oleh pelanggan atau user sampai ditemukan spesifikasi yang
sesuai dengan keinginan pelanggan atau user (Rosa, 2013).
Menurut Roger S. Pressman (2015) tahapan pembangunan sistem
dengan menggunakan metode prototipe adalah komunikasi
(communication) yaitu bertujuan menentukan tujuan dari keseluruhan
perangkat lalu mengidentifikasi persyaratan (quick plan) apa saja yang
dibutuhkan. Selanjutnya pembuatan model (modelling quick design) untuk
prototipe yang akan dibangun (construction of prototype) dan dilanjutkan
dengan proses evaluasi (deployment delivery and feedback). Berikut ini
merupakan penjelasan lengkap tahapan yang penulis lakukan berdasarkan
penjelasan di atas.
3.2.1.1 Komunikasi
Paradigma prototyping dimulai dengan adanya komunikasi
antara aktor yang akan menggunakan sistem tersebut untuk
menentukan sasaran hasil keseluruhan dari alat/sistem,
mengidentifikasi kebutuhan dan lingkungan dimana sistem tersebut
akan digunakan.
Pada tahapan ini komunikasi yang dilakukan adalah dengan
mencari informasi terkait, melalui referensi buku, skripsi dan jurnal
tentang pentingnya memotong kuku terutama bagi lansia, kemudian

22
UIN SYARIF HIDAYATULLAH JAKARTA
mendiskusikannya dengan pakar atau ahli dibidang penelitian penulis
(diskusi dilakukan dengan dosen pembimbing skripsi) untuk
menganalisis masalah lebih lanjut dan menyimpulkan sebuah solusi
yang telah teruji serta manfaat penelitian kedepannya.
3.2.1.2 Pengumpulan Kebutuhan
Prototyping dimulai dengan pengumpulan persyaratan
perancangan untuk menentukan tujuan keseluruhan dari sistem dan
alat, mengidentifikasi persyaratan apapun yang diketahui serta
menetukan area garis besar yang mana definisi lebih lanjut itu
diharuskan. Desain berfokus pada representasi dari aspek-aspek alat
yang dibuat, yang akan dilihat oleh pelanggan atau pengguna
(misalnya, pendekatan input dan format output) (Pressman &
R.MAXIM, 2015).
Pada tahapan pengumpulan kebutuhan ini, dilakukan
pengumpulan data wawancara terhadap pihak terkait, studi pustaka
dan literatur. Dari hasil pengumpulan data tersebut, penulis
mendapatkan data mengenai kendala (kebiasaan dan kendala),
komponen, tools, teori yang akan digunakan, data mengenai desain
dan proses pembuatan alat dan sistem. Tahap pengumpulan kebutuhan
ini akan terus berjalan selama masih membangun prototipe sampai
tahap pengujian alatnya.
3.2.1.3 Membangun Sistem
Dalam tahap membangun Sistem ini, difokuskan kepada
pembuatan flowchart untuk sistem robot pemotong kuku otomatis,
yang kemudian flowchart dibagi lebih spesifik lagi terhadap fungsi-
fungsi yang dapat digunakan dalam sistem, secara garis besar dimulai
dari arduino mengontrol push button yang menyalakan LED dan
menggerakan motor servo, motor servo berfungsi untuk memotong
kuku tersebut dan LED sebagai penanda bahwa gunting kuku
bergerak.

23
UIN SYARIF HIDAYATULLAH JAKARTA
3.2.1.4 Tahap Mengkodekan Sistem
Pada tahap ini, dibuat kode program di arduino menggunakan
bahasa pemrograman C. Selain itu, juga dilakukan pemograman untuk
push button yang terhubung dengan motor servo dan juga LED.
3.2.1.5 Pengujian Sistem
Pada tahap ini dilakukan user acceptance test, yaitu dengan
black box testing, cara pengujiannya dilakukan dengan menjalankan
atau mengeksekusi unit atau modul, kemudian diamati apakah hasil
dari unit itu sesuai dengan yang diinginkan oleh pengguna.
Selanjutnya akan dilakukan performance testing, untuk mengetahui
tingkat keberhasilan LED, waktu respon push button, dan waktu
respon motor servo. Hasil dari pengujian tersebut akan diobservasi
untuk memperoleh data yang akan dibahas di hasil penelitian.

24
UIN SYARIF HIDAYATULLAH JAKARTA
Alur Penelitian
Gambar 3.1 Kerangka Berpikir

25
4 BAB IV
ANALISIS, PERANCANGAN SISTEM, IMPLEMENTASI DAN
PENGUJIAN SISTEM
Bab ini akan membahas secara detail dan terperinci mengenai analisis dan
perancangan robot pemotong kuku otomatis dengan metode quick return
mechanism berbasis arduino.
Metode pengembangan sistem yang digunakan dalam penelitian ini adalah
metode prototipe yang sudah dibahas pada bab sebelumnya. Isi dari bab ini yaitu
akan menguraikan tahap pengembangan alat prototipe di antaranya adalah:
1. Tahap Komunikasi
2. Tahap Pengumpulan Kebutuhan
3. Tahap Membangun Sistem
4. Tahap Mengkodekan Sistem
5. Tahap Menguji Sistem
Berikut penjelasan detail tahap pengembangan pada penelitian ini.
Tahap Komunikasi
Tahapan pertama dalam prototipe menurut Pressman (2015) adalah
komunikasi, tahapan ini bertujuan untuk mendapatkan tujuan secara keseluruhan
alat yang akan dibangun. Pada tahapan ini penulis juga melakukan studi
kepustakaan dan pencarian jurnal-jurnal yang terkait, hal ini sangat dibutuhkan agar
penulis mendapatkan informasi-informasi terkini tentang permasalahan yang ada.
Pada tahap komunikasi ini, dilakukan diskusi langsung dengan dosen
pembimbing beserta penanggung jawab panti jompo Karmilus untuk mengetahui
gambaran sistem yang diperlukan, untuk selanjutnya dijadikan bahan pertimbangan
dalam membangun sistem yang dibutuhkan.
Tahap Pengumpulan Kebutuhan
Tahapan awal dalam metode prototipe adalah komunikasi, tahapan ini
bertujuan untuk mendapatkan tujuan secara keseluruhan alat yang akan dibangun.

26
UIN SYARIF HIDAYATULLAH JAKARTA
Pada tahap ini, dijelaskan apa saja yang menjadi kebutuhan sistem, yang meliputi
mendefinisikan ruang lingkup, analisis kebutuhan pada software maupun
hardware, dan juga analisis sistem berjalan dan usulan.
4.2.1 Mendefinisikan Ruang Lingkup
Ruang lingkup dalam penelitian ini adalah para lansia yang berada
di Panti Jompo Karmilus yang dapat menggunakan robot pemotong kuku
otomatis.
Selain itu dideskripsikan juga fungsi apa saja yang mungkin dapat
membantu para lansia yang kesulitan dalam memotong kuku dikarenakan
faktor usia dan fisik yang sudah melemah. Pengembangan dilakukan
berdasarkan pada hasil wawancara dengan melibatkan narasumber.
4.2.2 Analisis Sistem Berjalan
Berdasarkan hasil wawancara dan studi literatur yang dilakukan,
dapat diketahui bahwa hampir semua alat yang ada saat ini masih
digunakan secara manual.
Alat ini merupakan alat yang sebenarnya sangat bergantung pada
ketersediaan tenaga manusia dalam mengoprasikan alat, karena jika tenaga
manusia tidak tersedia dengan berbagai alasan, maka alat tidak dapat
berjalan sebagaimana semestinya.
Berdasarkan analisis yang sudah dilakukan, maka alat yang sudah
ada selama ini pada proses pemotongan kuku dapat digambarkan pada
gambar 4.1.

27
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 4.1 Sistem berjalan
4.2.3 Desain Sistem Usulan
Pada penelitian ini kemudian ditarik kesimpulan bahwa para lansia
mengalami kesulitan dalam memotong kuku sendiri sehingga harus dibantu
oleh pengurus. Sebagai salah satu solusi dari permasalahan tersebut diusulkan
sebuah robot pemotong kuku otomatis dengan metode quick return
mechanism berbasis Arduino. Berikut adalah usulan sistem dapat dilihat pada
gambar 4.2

28
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 4.2 Sistem Usulan
Gambar 4.2 menunjukan aktifitas pengguna ketika memotong kuku
menggunakan gunting kuku otomatis dengan metode quick return
mechanism. Pengguna memasukkan kuku jari yang akan dipotong.
Pengguna menekan push button yang dapat menyalakan LED dan
menggerakan motor servo. Motor servo bergerak secara melingkar dan
gunting kuku bergerak secera linier, proses ini merupakan Quick Return
Mechanism. Hasilnya kuku dari pengguna terpotong.
4.2.4 Analisis Kebutuhan Perangkat Keras
Dalam pembuatan robot pemotong kuku otomatis dengan metode
quick return mechanism ini, dibutuhkan beberapa perangkat keras atau
hardware baik berupa mikrokomputer dan komponen elektronik lainnya.
Pemilihan spesifikasi hardware menjadi sangat penting agar sistem dapat
berjalan dengan baik sesuai dengan kebutuhan pengguna. Tabel 4.2
menerangkan daftar kebutuhan perangkat keras dibutuhkan:

29
UIN SYARIF HIDAYATULLAH JAKARTA
Tabel 4.1 Kebutuhan perangkat keras
No. Komponen Jumlah Kegunaan
1. Arduino Uno 1 Sebagai otak dari sistem yang dapat mengolah
data dan melakukan seluruh proses pada
sistem.
2. Push Button 1 Sensor yang akan menggerakan motor servo
3. Motor Servo 1 Sebagai penggerak gunting kuku
5. LED 1 Sebagai penanda gunting kuku telah bergerak
6. Gunting kuku 1 Sebagai alat yang akan memotong kuku
pengguna
7. Powerbank 1 Sumberdaya perangkat
8. Kabel 1 Paket
Mengalirkan data dan daya dari
mikrokontroler ke komponen atau sebaliknya
4.2.5 Analisis Kebutuhan Perangkat Lunak
Selain Hardware yang sudah disebutkan sebelumnya, dibutuhkan
juga Software dan Tools untuk mendukung hardware agar berjalan sesuai
dengan yang diharapkan. Berikut software yang dibutuhkan dalam
pembuatan robot pemotong kuku otomatis ini agar dapat berjalan sesuai
dengan yang diharapkan.
Tabel 4.2 Analisis Kebutuhan Software dan Tools
No. Nama
Software/Tools
Kegunaan
1.
Pemrograman
Arduino IDE
Untuk memberikan instruksi-instruksi kepada Arduino
Uno.
2. Corel Video Studio Digunakan untuk proses editing video demo.
3. Fritzing Memungkinkan penulis untuk melakukan desain
skematik sistem berupa gambar skema rangkaian

30
UIN SYARIF HIDAYATULLAH JAKARTA
4. Photoshop CS6 Memungkinkan penulis untuk melakukan desain atau
rancangan gambar.
5. Visio 2013 Memungkinkan penulis untuk melakukan desain sistem
aplikasi berupa flowchart.
Tahap Membangun Sistem
Membangun prototipe didefinisikan sebagai perancangan sementara
sistem yang dibuat sebagai tahap awal membuat suatu prototipe sistem
sebelum diubah ke dalam bentuk kode. Pada tahap ini akan dibuat skenario
arsitektur rancangan sistem yang menjadikan perangkat keras yang digunakan
menjadi sebuah kesatuan sistem sehingga rangkaian tersebut dapat di
program pada tahap selanjutnya.
Penulis membuat sebuah flowchart atau alur kerja dari robot pemotong kuku
otomatis dengan arsitektur sistem usulan pada gambar 4.3.
Gambar 4.3 Flowchart Sistem

31
UIN SYARIF HIDAYATULLAH JAKARTA
Penjelasan dari hubungan antar komponen adalah sebagai berikut:
1. Sensor Push Button merupakan sensor tekan yang akan digunakan
sebagai penggerak motor servo dan untuk menyalakan LED.
2. LED berfungsi sebagai penanda bahwa alat bergerak.
3. Motor Servo berfungsi sebagai penggerak gunting kuku.
4.3.1 Skematik Sistem Arduino dengan Push Button
Dalam perancangan prototipe sistem ini peneliti menggunakan
skematik sistem untuk menggambarkan model sistem yang dibuat. Dalam
skematik ini akan dijelaskan bagaimana mikrokontroler Arduino Uno 328
terhubung dengan Push Button untuk menggerakan motor servo. Berikut
adalah bentuk skematik Sistem dari Arduino uno 328 yang terhubung
dengan Push Button.
Gambar 4.4 Skematik Arduino dengan Push Button
Tabel 4.3 Pin Push Button
No. Pin Push Button Wire
1. Pin 1 (–) Arduino pin ground
2. Pin 2 Arduino pin 12

32
UIN SYARIF HIDAYATULLAH JAKARTA
4.3.2 Skematik Sistem Arduino dengan Motor Servo
Dalam skematik ini akan dijelaskan bagaiamana Arduino uno 328
terhubung ke Motor Servo sebagai penggerak gunting kuku.
Gambar 4.5 Skematik Arduino dengan Motor Servo
Tabel 4.4 Pin konfigurasi Motor Servo
No. Pin Motor Servo Wire
1. VCC Arduino pin 5v
2. GND Arduino pin GND
3. PWM Arduino pin 9
4.3.3 Skematik Sistem Arduino dengan LED
Dalam skematik ini akan dijelaskan bagaimana Arduino uno 328
terhubung ke LED sebagai penanda gunting kuku bergerak.

33
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 4.6 Skematik Arduino dengan LED
Tabel 4.5 Pin konfigurasi LED
No. Pin LED Wire
1. Katoda (–) Arduino pin ground
2. Anoda Arduino pin 10

34
UIN SYARIF HIDAYATULLAH JAKARTA
4.3.4 Skematik Quick Return Mechanism
Gambar 4.7 Skematik Quick Return Mechanism
Quick Return Mechanism adalah mekanisme yang mengubah gerak
memutar menjadi gerak bolak-balik linier yang berbeda untuk kedua gaya
dorongnya. Pada Gambar 4.7, motor servo bergerak secara memutar yang
menarik tuas. Tuas tersebut menarik gunting kuku agar bergerak secara
bolak – balik linier, maka terjadi proses Quick Return Mechanism.

35
UIN SYARIF HIDAYATULLAH JAKARTA
4.3.5 Pembangunan Pemotong Kuku Otomatis
Gambar 4.8 Pembangunan Pemotong Kuku Otomatis
Tahap Mengkodekan Sistem
Tahapan selanjutnya adalah tahap mengkodekan sistem, yang merupakan
tahap menerjemahkan desain sistem menjadi sebuah bahasa pemograman.
Mengacu kepada analisis sistem usulan, yang menggunakan beberapa fungsi

36
UIN SYARIF HIDAYATULLAH JAKARTA
hardware yang harus diprogram agar bisa berjalan sebagaimana fungsinya. Berikut
ini adalah langkah-langkah pada pemrograman alat.
4.4.1 Pengkodean Arduino
Pada tahap pengkodean arduino digunakan IDE arduino 1.8.5 agar
Arduino dapat menjalankan perintah sesuai dengan keinginan pengguna
sehingga dapat terintegrasi dengan modul-modul pendukung lainnya.
4.4.2 Pengkodean Push Button dengan Motor Servo dan LED
Berikut merupakan potongan kode untuk Push Button dengan Motor
Servo dan LED.
#include <Servo.h>
//inisiasi servo
const int ser_open = 10;
const int ser_close = 180;
const int servo = 9; //pin servo
int pos = 0; //position servo
//inisiasi button
const int btn = 12;
int posisi_btn = 0;
//inisiasi nama servo
Servo myservo;
//inisiasi LED
const int led = 10;
//waktu
unsigned long waktu = 0; //tempat millis (swipe variable)
void setup() {
myservo.attach(servo);
pinMode(btn, INPUT_PULLUP);
pinMode(led, OUTPUT);
Serial.begin(115200);

37
UIN SYARIF HIDAYATULLAH JAKARTA
}
void loop() {
posisi_btn = digitalRead(btn); //read position button
if (posisi_btn == LOW) { //if button pressed
Serial.println("tomol di tekan");
Serial.print("waktu start :");
waktu = millis();
Serial.println(waktu);
digitalWrite(led, HIGH);
Serial.println("LED on");
Serial.print("respon tombol :");
waktu = millis() - waktu;
Serial.println(waktu);
waktu = millis();
Serial.println("servo tutup");
for (pos = ser_open; pos <= ser_close; pos += 1) {
myservo.write(pos);
delay(5);
}
Serial.print("respon tutup :");
waktu = millis() - waktu;
Serial.println(waktu);
waktu = millis();
Serial.println("servo buka");
for (pos = ser_close; pos >= ser_open; pos -= 1) {
myservo.write(pos);
delay(5);
}

38
UIN SYARIF HIDAYATULLAH JAKARTA
Serial.print("respon buka :");
waktu = millis() - waktu;
Serial.println(waktu);
waktu = millis();
Serial.println("servo berhasil bergerak");
Serial.print("waktu end :");
waktu = millis();
Serial.println(waktu);
Serial.println("tombol tidak di tekan");
digitalWrite(led, LOW);
Serial.println("LED off");
Serial.println("-------------------------------");
}
if (posisi_btn == HIGH) { //if button not pressed
//Serial.println("tombol tidak di tekan");
}
}
Tahap Menguji Sistem
Setelah melakukan perancangan, peneliti melakukan pengujian terhadap hasil
implementasi sistem. Pengujian dilakukan pada dua tingkatan, yaitu tingkat sistem
dengan aspek pengujian performance dan tingkat pengguna dengan aspek
pengujian functionality. Metode yang digunakan dalam pengujian adalah black box
testing.
4.5.1 User Acceptance Test
Uji fungsionalitas dilakukan dengan user acceptance testing.
Parameter yang uji disusun berdasarkan fungsi-fungsi pokok yang dibutuhkan

39
UIN SYARIF HIDAYATULLAH JAKARTA
stakeholder. Dalam pengujian ini dilakukan oleh target dari penelitian ini
yaitu lansia.
Tabel 4.6 UAT-01 Pemotong Kuku Otomatis
User Acceptance Test
Nama Sistem Pemotong Kuku Otomatis
Nomor Uji UAT-01
Topik Pengujian Fungsi Pemotong Kuku Otomatis
Tanggal Pengujian 4 September 2019
Penguji Yeni Nuryani
No. Fungsi pokok Sesuai
ya Tidak
1. Push Button mampu menggerakan motor servo
dan menyalakan LED 1
2. Setelah Push Button ditekan, LED dapat
menyala 1
3. Setelah Push Button ditekan, servo dapat
bergerak 1
4. Motor Servo menggerakan gunting kuku
sehingga dapat memotong kuku 1
Jumlah 4 0
Tabel 4.5 merupakan hasil dari pengujian kepada pengguna terhadap
fitur yang terdapat pada pemotong kuku otomatis. Hasilnya 4 kasus
pengujian sesuai dengan harapan pengguna.
4.5.2 Performance Testing
Untuk mendapatkan hasil performa dari alat, peneliti membuat
beberapa skenario pengujian dengan beberapa parameter, yaitu sebagai
berikut:

40
UIN SYARIF HIDAYATULLAH JAKARTA
1) Ujicoba tingkat keberhasilan LED. Pengujian LED ini dilakukan
untuk mengetahui apakah LED berhasil menyala atau tidak.
Pengujian ini menggunakan parameter tegangan, terdapat 3
sumberdaya yang digunakan, yaitu Powerbank, Baterai, dan
Adaptor. Pengujian dilakukan 10 kali percobaan. Table 4.8 berikut
merupakan hasil dari pengujian tersebut.
Tabel 4.7 Uji coba keberhasilan LED
Uji coba keberhasilan LED
No Tegangan berhasil gagal
1. Powerbank (5V) 10 0
2. Baterai (9V) 10 0
3. Adaptor (12V) 10 0
2) Uji waktu respon push button menggunakan parameter tegangan.
Pengujian waktu respon ini dilakukan untuk mengetahui waktu yang
dibutuhkan push button untuk dapat menyalakan LED dan
menggerakan motor servo. Hasil waktu respon dalam satuan
milisekon (ms), dihitung mulai dari push button ditekan hingga LED
menyala dan motor servo bergerak. Table 4.9 berikut merupakan
hasil dari pengujian tersebut.
Tabel 4.8 Uji waktu respon Push Button
Pengaruh tegangan terhadap waktu pada push
button
Tegangan Response time (ms)
Powerbank (5V) 1
Baterai (9V) 4
Adaptor (12) 6

41
UIN SYARIF HIDAYATULLAH JAKARTA
3) Uji waktu respon motor servo menggunakan parameter tegangan.
Pengujian waktu respon ini dilakukan untuk mengetahui waktu yang
dibutuhkan motor servo untuk menutup dan terbuka. Hasil waktu
respon dalam satuan milisekon (ms). Table 4.10 berikut merupakan
hasil dari pengujian tersebut.
Tabel 4.9 Uji Waktu Respon Motor Servo
Pengaruh tegangan terhadap waktu pada
motor servo
Tegangan Response time (ms)
Tutup Buka
Powerbank (5V) 865 866
Baterai (9V) 868 872
Adaptor (12V) 873 881
Dari seluruh rangkaian pengujian tersebut, peneliti memperoleh data
yang akan dibahas lebih lanjut dalam bab selanjutnya yaitu Bab V Hasil dan
Pembahasan.

42
5 BAB V
HASIL DAN PEMBAHASAN
Robot Pemotong Kuku Otomatis
Robot ini dapat memotong kuku secara otomatis. Pengguna
menghubungkan alat ini dengan Powerbank sebagai sumberdaya. Pengguna
memasukkan kuku yang akan dipotong lalu menekan push button yang
menyalakan LED sebagai penanda bahwa alat tersebut bergerak dan juga
menggerakan motor servo. Motor Servo menarik tuas yang membuat gunting
kuku tertarik, disini terjadi proses Quick Return Mechanism, yaitu mengubah
gerakan memutar menjadi gerakan linear bolak balik. Servo melakukan
gerakan memutar dan gunting kuku melakukan gerakan linear bolak balik.
Kuku pengguna pun berhasil terpotong. Berdasarkan kebutuhan dari
penelitian yang didapatkan dari hasil wawancara, kemudian melewati
berbagai uji coba dapat diketahui dan disimpulkan bahwa alat berhasil
memotong kuku pengguna. Selanjutnya akan dijelaskan mengenai hasil
pengujian terhadap robot pemotong kuku otomatis.
Hasil Pengujian Sistem
Berdasarkan hasil pengujian performance pada robot pemotong kuku
otomatis, maka diperoleh hasil sebagai berikut:
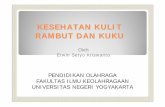
Gambar 5.1 Tingkat Keberhasilan LED
0
2
4
6
8
10
12
Powerbank (5V) Baterai (9V) Adaptor (12V)
Tegangan Terhadap Keberhasilan LED
LED

43
UIN SYARIF HIDAYATULLAH JAKARTA
Gambar 5.1 menampilkan grafik dari data hasil pengujian tingkat
keberhasilan LED yang dipengaruhi oleh tegangan yang digunakan. Terlihat pada
grafik menunjukan garis lurus, yang berarti tingkat keberhasilan konstan pada
setiap pengujian. Dari grafik juga dapat diketahui bahwa seluruh tingkat
keberhasilan LED mencapai nilai maksimal diseluruh tegangan pengujian. Maka
dari hasil tersebut dapat dikatakan bahwa tegangan tidak berpengaruh pada tingkat
keberhasilan LED.
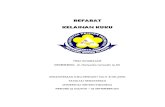
Gambar 5.2 Pengaruh Tegangan Terhadap Response Time Push Button
Gambar 5.2 menampilkan grafik dari data hasil pengujian waktu respon
Push Button jika dipengaruhi oleh tegangan. Terlihat pada grafik pengujian
menunjukan perubahan waktu respon yang fluktuatif antara 1 ms hingga 6 ms.
Berdasarkan penjelasan tersebut maka dapat dikatakan bahwa waktu respon Push
Button dipengaruhi oleh tegangan dengan nilai rata-rata waktu respon 0.0037 detik.
0
1
2
3
4
5
6
7
Powerbank (5V) Baterai (9V) Adaptor (12V)
Wak
tu (
ms)
Tegangan Terhadap Waktu Push Button
Push Button

44
UIN SYARIF HIDAYATULLAH JAKARTA
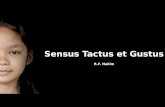
Gambar 5.3 Pengaruh Tegangan Terhadap Response Time Motor Servo
Gambar 5.3 menampilkan grafik dari data hasil pengujian waktu respon
motor servo jika dipengaruhi oleh tegangan. Terlihat pada grafik pengujian fungsi
tutup yang ditandai dengan garis warna biru, menunjukan perubahan waktu respon
yang fluktuatif namun cenderung stabil antara 865 ms hingga 875 ms. Begitu juga
pada fungsi buka yang digambarkan dengan garis jingga, menunjukan perubahan
waktu respon yang fluktuatif namun cenderung stabil antara 865 ms hingga 880 ms.
Terlihat waktu respon fungsi tutup lebih cepat dibanding waktu respon fungsi buka.
Hal ini dikarenakan pada kode program, fungsi buka di eksekusi setelah
pengecekan fungsi tutup terlebih dahulu. Berdasarkan penjelasan tersebut maka
dapat dikatakan bahwa waktu respon motor servo dipengaruhi oleh tegangan
dengan nilai rata-rata waktu respon saat menutup 0.868 detik, sedangkan saat
terbuka 0.873 detik.
Hasil pengujian tingkat user
Berdasarkan pengujian yang dilakukan oleh lansia melalui user acceptance
test pada robot pemotong kuku otomatis, data hasil pengujian fungsionalitas
disederhanakan pada tabel berikut.
855
860
865
870
875
880
885
Powerbank (5V) Baterai (9V) Adaptor (5V)
Wak
tu (
ms)
Tegangan Terhadap Waktu Motor Servo
Tutup Buka

45
UIN SYARIF HIDAYATULLAH JAKARTA
Tabel 5.1 Hasil UAT
No. Uji Fitur Jumlah Sesuai
ya Tidak
UAT-01 Pemotong Kuku Otomatis 4 0
Berdasarkan table 5.1 jumlah skor kesesuaian yang diperoleh dalam penelitian ini
adalah 4. Sedangkan skor yang diharapkan adalah jumlah skor lolos pengujian yang
diharapkan dalam user acceptace test ini adalah jumlah skor sesuai ditambah
dengan skor tidak sesuai dari hasil pengujian, yaitu 4+0 =4. Maka persentase tingkat
kesesuaian alat ini dengan pengguna adalah 100% dengan penghitungan sebagai
berikut:
𝑡𝑖𝑛𝑔𝑘𝑎𝑡 𝑘𝑒𝑠𝑒𝑠𝑢𝑎𝑖𝑎𝑛 =𝑠𝑒𝑠𝑢𝑎𝑖
𝑠𝑒𝑠𝑢𝑎𝑖 + 𝑡𝑖𝑑𝑎𝑘 𝑠𝑒𝑠𝑢𝑎𝑖𝑥100
𝑡𝑖𝑛𝑔𝑘𝑎𝑡 𝑘𝑒𝑠𝑒𝑠𝑢𝑎𝑖𝑎𝑛 =4
4 + 0 𝑥 100
𝑡𝑖𝑛𝑔𝑘𝑎𝑡 𝑘𝑒𝑠𝑒𝑠𝑢𝑎𝑖𝑎𝑛 = 100%

46
6 BAB VI
KESIMPULAN DAN SARAN
Kesimpulan
Berdasarkan hasil penelitian dan pembahasan yang telah dibahas pada bab
sebelumnya, maka dapat disimpulkan bahwa robot pemotong kuku otomatis dengan
metode quick return mechanism berbasis Arduino berhasil dibuat untuk mengatasi
masalah lansia di Panti Jompo Karmilus yang tidak bisa memotong kuku sendiri.
Berdasarkan hasil pengujian sistem, seluruh tingkat keberhasilan LED
mencapai nilai maksimal diseluruh tegangan pengujian. Waktu respon Push Button
dipengaruhi oleh tegangan dengan nilai rata-rata waktu respon 0.0037 detik. waktu
respon motor servo dipengaruhi oleh tegangan dengan nilai rata-rata waktu respon
saat menutup 0.868 detik, sedangkan saat terbuka 0.873 detik. Berdasarkan hasil
pengujian tingkat user, persentase tingkat kesesuaian alat ini dengan pengguna
adalah 100%
Saran
Hasil dari penelitian ini masih belum sempurna, oleh karena itu masih banyak
hal yang dapat dikembangkan. Berikut merupakan saran dari penelitian ini,
diantaranya adalah:
1. Untuk motor servo dapat menggunakan yang lebih kuat putarannya agar
pemotong kukunya dapet tertarik lebih kuat.
2. Menggunakan gunting kuku yang lebih tajam agar pemotongan lebih akurat.
3. Mengganti push button dengan sensor agar lebih otomatis
4. Desain alat dibuat lebih presisi agar proses pemotongan lebih tepat.

47
UIN SYARIF HIDAYATULLAH JAKARTA
DAFTAR PUSTAKA
Aisyah, S., & Hidir, A. (2014). Kehidupan Lansia yang Dititipkan Keluarga di Panti
Sosial Tresna Werdha Khusnul Khotimah Pekanbaru. Jurnal Online
Mahasiswa, 1, 1–14.
Herlan. (2015). Definition of Push Button.
Houde, S., & Hill, C. (2014). What do Prototypes Prototypes?
Kosasih, R. (2017). Gunting Kuku. Retrieved from
http://www.kerjanya.net/faq/7587-gunting-kuku.html
Kumar, V. (2017). Introduction to Robotics. (1985).
Latifa, U., & Saputro, J. S. (2018). Perancangan Robot Arm Gripper Berbasis
Arduino Uno. 3(2), 138–141.
Martinus. (2013). Definition of Arduino Microcontroller.
Muslihudin, M., & Oktafianto. (2016). Analisis dan Perancangan Sistem Informasi
Menggunakan Model Terstruktur dan UML (1st ed.). Yogyakarta: Andi.
Permana, F., Sumarwati, M., & Rosyadi, I. (2009). Hubungan Penurunan Fungsi
Gerak Lansia Terhadap Strategi Koping Stres Lansia Di Panti Jompo Welas
Asih Kec. Singaparna Kab. Tasikmalaya. Soedirman Journal of Nursing, 4(3),
125–130.
Pressman, R. S., & R.MAXIM, B. (2015). Software Engineering A Practitioner’s
Approach.
Siswaja, H. D. (2016). Principle of Work and Classification of Robots. Informatics
Media, 7(3), 147–157.
Sudaryono, Gaguk, & Wardani. (2011). Pengembangan Instrumen Penelitian
Pendidikan.
Teknikelektronika.com. (2019). Definition of LED (Light Emitting Diode) and
How It Works. Retrieved September 16, 2019, from
https://teknikelektronika.com/pengertian-led-light-emitting-diode-cara-kerja/
Wahyu Kusuma Raharja, & Suhilman, M. O. (2017). Purwarupa Alat Pemotong
Kabel Otomatis Berdasar Panjang dan Jumlah Potongan Berbasis Arduino.
16, 81–92.

48
UIN SYARIF HIDAYATULLAH JAKARTA
Wakil, A., Ch, S., & Ariessaputra, S. (2018). Rancang Bangun Alat Pemotong Kue
Bolu Dengan Metode Quick Return Mechanism Berbasis Arduino Uno Atmega
328P.

49
UIN SYARIF HIDAYATULLAH JAKARTA
DAFTAR LAMPIRAN
Wawancara ini dibuat untuk mengetahui data terkait lansia di Panti Jompo
Karmilus
Narasumber: Victoria Wanitania, selaku penanggungjawab Panti Jompo
Karmilus
Pertanyaan untuk wawancara.
1) Panti Jompo ini sudah berdiri sejak kapan?
Jawaban: Sudah cukup lama, dari tahun 1997.
2) Berapa jumlah lansia di Panti Jompo ini?
Jawaban: Terdapat 5 wanita.
3) Lansia disini rata -rata usia berapa?
Jawaban: Disini rata – rata sudah berusia 70 tahun keatas.
4) Dikarenakan usia mereka, apakah terdapat penurunan fungsi tubuh?
Jawaban: Iya ada, mereka sudah mengalami penurunan penglihatan, dan
tangannya juga sudah gemetar apabila memegang benda.
5) Bagaimana para lansia disini dalam memotong kukunya?
Jawaban: karena penurunan fungsi tubuh yang sudah saya sampaikan tadi,
mereka menjadi kesulitan untuk memotong kukunya sendiri, sehingga harus
dibantu oleh pengurus disini.
6) Menurut Ibu, apakah dibutuhkan pemotong kuku otomatis untuk membantu
lasia?
Jawaban: ya perlu, sehingga mereka dapat memotong kukunya sendiri dan
juga membuat waktu pemotongan lebih efisien.

50
UIN SYARIF HIDAYATULLAH JAKARTA
Wawancara ini dibuat untuk mengetahui tingkat keberhasilan robot
pemotong kuku otomatis
Narasumber: Victoria Wanitania, selaku penanggungjawab Panti Jompo
Karmilus
Pertanyaan untuk wawancara.
1. Apakah push button sudah berjalan dengan baik?
Jawaban: iya, sudah berhasil berjalan dengan baik
2. Apakah LED berhasil menyala?
Jawaban: iya, berhasil menyala dan tidak pernah error
3. Apakah servo bergerak dengan baik?
Jawaban: iya, bergerak dengan baik dan berhasil menggerakan gunting kukunya
4. Apakah kuku lansia berhasil terpotong?
Jawaban: iya, berhasil terpotong, namun terkadang untuk kukunya yang keras agak
sulit terpotong.
5. berikan nilai 1 – 100 % untuk tingkat kepuasan anda selama menggunakan alat
tersebut?
Jawaban: 80 %

51
UIN SYARIF HIDAYATULLAH JAKARTA

52
UIN SYARIF HIDAYATULLAH JAKARTA

53
UIN SYARIF HIDAYATULLAH JAKARTA