AUTOMATIC MOBILE ROBOT MENGGUNAKAN DATA KAMERA SEBAGAI PENGAMBIL GAMBAR JALAN ROBOT

of 398
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
1/397
ARBURG GmbH + Co KG
Postfach 11 09
72286 Lossburg
Tel.: +49 (0) 74 46 33-0
Fax: +49 (0) 74 46 33 33 65http://www.arburg.com
e-mail: [email protected]
Instrucciones de uso para
la máquina No. 603910, 224416
ALTCAM SLOVAKIA SRO
MULTILIFT SELECT 15kg quer720 S 3200 - 2100
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
15.04.2013
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
2/397
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
3/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
Prólogo/Instrucciones de seguridad
Manual de instrucciones original
Introducción
Advertencias de seguridad
Descripción general del MULTILIFT SELECT
1 Introducción
1.1.1 Datos técnicos MULTILIFT SELECT 15 kg
1.1.2 Transporte del MULTILIFT SELECT
1.1.3 Montaje del MULTILIFT SELECT
1.1.4 Retirar los seguros de transporte
1.1.5 Conexión eléctrica
1.1.6 Conexión neumática
1.1.7 Montaje del dispositivo de protección
1.2 Comprobar los dispositivos de protección
1.2.1 Visión de conjunto de los dispositivos de protección
1.2.2 Comprobar los dispositivos de protección en el MULTILIFT
1.2.3 Interruptores de seguridad en la valla de protección
1.2.4 Interruptores de seguridad en la zona del molde
1.2.5 Interruptor de parada de emergencia de la valla de protección
1.3 Generalidades sobre la unidad de mando SELOGICA
1.3.1 Construcción modular del mando SELOGICA
1.3.2 La SELOGICA direct
1.3.3 Introducción a la distribución de la pantalla
1.3.4 Indicación del estado de la máquina
1.3.5 Tipo y nivel de navegación
1.3.6 Las teclas de acceso directo
1.3.7 Las teclas especiales
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
4/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
1.3.8 El cuadro de edición
1.3.9 La pantalla de parámetros
1.3.10 Los niveles de navegación
1.4.2 Los paneles de mando
1.4.3 Telecontrol ACTIONICA
2 El MULTILIFT
2.1 Programar el sistema de robot
2.1.1 Activar el MULTILIFT
2.1.2 Ciclo de la máquina básico con intervención del sistema de robot
2.2 Función de aprendizaje mit Assistent
2.2.1 Teachen für das Robot-System
2.2.2 Programación por aprendizaje “teach-in” en la práctica
2.4 Modos de funcionamiento
2.4.1 Selección de los modos de funcionamiento
2.4.2 Modo de funcionamiento "Manual"
2.4.3 Modo de funcionamiento "Ajuste"
2.4.4 Modo de funcionamiento "Carrera libre"
2.4.5 Modo de funcionamiento "Paso por paso en Auto, Prueba y Reequipar"
2.4.6 Modo de funcionamiento "Velocidad reducida"
2.4.8 Modo de funcionamiento “Manual con dispositivo de confirmación”
2.5 Selección del sistema de robot
2.5.1 Definir las entradas y las salidas
2.5.2 Fijar el número de entradas y salidas
2.5.3 Designar las entradas y las salidas
2.5.4 Grupos de salidas comunes
2.5.5 Salidas para el vacío
3 Pprogramación del ciclo
3.1 Editores de ciclos del MULTILIFT
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
5/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
3.1.1 Visión de conjunto de los editores de ciclos
3.1.2 Tipos de ciclo
3.2 Explicación de los distintos símbolos
3.2.1 Agrupación de los símbolos
3.2.2 Símbolo "Posicionar"
3.2.3 Símbolo "salida”
3.2.4 Símbolo “consulta de entrada”
3.2.5 Símbolo "consulta valor analógico"
3.2.6 Símbolo “Zona del molde libre”
3.2.7 Símbolos para ejes neumáticos
3.2.8 Símbolos "cinta transportadora"
3.2.9 Símbolo "duración"
3.2.10 Símbolo “repetición”
3.2.11 Símbolos "garra, vacío"
3.2.13 Adoptar símbolos como modelo
3.3 Establecer los ciclos
3.3.1 Información general sobre los ciclos
3.3.2 Ciclo de posición básica
3.3.3 Ciclo de producción
3.3.4 Situar en posición neutra
3.3.5 Deposito de piezas 1
3.3.8 Recogida de piezas 1
4 Funciones ampliadas
4.1 Consultas de entrada con ramificación
4.3 Grupos / subprogramas
4.4 Programar contadores
4.4.1 Tipos de contadores
4.4.2 Contadores en el ciclo de producción
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
6/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
4.5 Definición de esquemas
4.5.1 Depósito de piezas con definición de esquemas
4.5.2 Funciones de depósito con definición de esquemas
4.5.3 Niveles y capas intermedias
4.5.4 Depósito con variación
4.5.6 Posicionar por mando de suceso
4.5.7 Vigilancia del par para servoejes
4.5.8 Ejes con diferencia de presión
4.5.9 Depósito y recogida de piezas sin esquema
4.6 Entradas de vigilancia para el sistema de robot
4.8 Movimientos sincronizados con el sistema robot
4.9 Liberaciones y vigilancias
4.9.1 Posiciones de liberación
4.9.2 Vigilancias para el MULTILIFT
4.10 Páginas de resumen
4.10.1 Resumen de datos
5 Ajuste y ciclo de prueba
5.1 Vigilancia de los márgenes de desplazamiento
5.1.1 Principio de la vigilancia de los márgenes de desplazamiento
5.1.2 Selección de entradas/salidas de los márgenes de desplazamiento
5.1.3 Programación de los márgenes de desplazamiento
6 Manipulación de registros de datos
6.2 Administración de programas
6.2.1 Unidad de almacenamiento de datos
6.2.2 Administración de programas
7 Trabajos de mantenimientoy limpieza
7.1 Notificación de mantenimiento SELOGICA direct
7.1.1 Mantenimiento del MULTILIFT SELECT
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
7/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
7.1.2 Trabajos de mantenimiento en el MULTILIFT SELECT
Informaciones importantes
Dénos su opinión...
Direcciones ARBURG
Puesta en marcha / instrucción
Lista de control de las instrucciones de comprobación para instruir en un MULTILIFT
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
8/397
abcdefghijklmnopqrstuvwxyz öäü ß ABCDEFGHIJKLMNOPQRSTUVWXYZÖÄÜ
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
9/397
Prólogo/Instrucciones de seguridad
. . \ M A S C H I N E \ T R E N N B L A T T_
T Y P_
6 \ E S 0 0_
I . F M
0 1 2
0 0 5 . 0 8 . 3 1
- 1 -
Prólogo/
Instrucciones de seguridad
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
10/397
Prólogo/Instrucciones de seguridad
. . \ M A S C H I N E \ T R E N N B L A T T_
T Y P_
6 \ E S 0 0_
I . F M
0 1 2
0 0 5 . 0 8 . 3 1
- 2 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
11/397
Manual de instrucciones original
. . \ A L L G \ E S 0 0_
A_
0 1_
3 0 6_
0 0 0
2 0 1 1 . 0
9 . 0
5
- 1 -
Todos los derechos de autor en esta documentación están protegidos, esto significa entre otros, que no sólo el derecho, la realización de
copias del documento sin importar el sistema que se utilice y en que número sino también el derecho de ofrecer y distribuir al público el
original o copias están completamente protegidos por los derechos de autor.
Ninguna parte del documento podrá copiarse sin el consentimiento por escrito de ARBURG GmbH & Co KG no importando el sistema
utilizado, tampoco su utilización para formación o reproducción y transmisión electrónica.
© ARBURG GmbH + Co KG
Manual de instrucciones original
¡ADVERTENCIA!Un uso inadecuado de la máquina puede provocar daños personalesconsiderables!
Antes de poner en funcionamiento la máquina lea el manual deinstrucciones y tenga en cuenta las indicaciones de seguridad.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
12/397
Manual de instrucciones original
. . \ A L L G \ E S 0 0_
A_
0 1_
3 0 6_
0 0 0
2 0 1 1 . 0
9 . 0
5
- 2 -
Todos los derechos de autor en esta documentación están protegidos, esto significa entre otros, que no sólo el derecho, la realización de
copias del documento sin importar el sistema que se utilice y en que número sino también el derecho de ofrecer y distribuir al público el
original o copias están completamente protegidos por los derechos de autor.
Ninguna parte del documento podrá copiarse sin el consentimiento por escrito de ARBURG GmbH & Co KG no importando el sistema
utilizado, tampoco su utilización para formación o reproducción y transmisión electrónica.
© ARBURG GmbH + Co KG
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
13/397
Introducción
. . \ S T R G - S W \ S - S W 4 0 X X \ E S 0 0_
B_
0 2_
4 0 0_
0 0 0 2 0 1 1 . 0
6 . 2
0 0 1
- 1 -
Introducción
El objetivo de estadocumentación
es ofrecerle una introducción al manejo del sistema de robot MULTILIFT.
Este manual de servicio quiere ayudarle a familiarizarse con el MULTILIFT ylas aplicaciones conformes a lo previsto.
El manual de servicio contiene información importante para utilizar elMULTILIFT de manera adecuada y rentable. Su cumplimiento le permiteevitar riesgos, gastos de reparación y tiempos de parada no programada,así como mejorar la fiabilidad y la vida operativa del MULTILIFT.
El manual de servicio se debe completar con las instruccionescorrespondientes a las directrices nacionales en materia de prevención de
accidentes y protección del medio ambiente.
El manual de servicio debe estar disponible en todo momento en el lugarde trabajo del MULTILIFT.
Toda persona que trabaja con o en el MULTILIFT debe leer y respetar elmanual de servicio, por ejemplo:
♦ Manejo, incluyendo la preparación, la reparación de averías en el transcursodel trabajo, la eliminación de residuos de la producción, elmantenimiento, la eliminación de combustibles y materiales auxiliares.
♦ Mantenimiento (mantenimiento, inspección, reparación) y/o
♦ Transporte
Además del manual de servicio y de los reglamentos vigentes en cadapaís para la prevención de accidentes, también se deben observar lasreglas técnicas reconocidas para trabajar de manera segura y profesional.
Ciertas instrucciones de manejo y de seguridad aplicables tanto a lamáquina como al MULTILIFT se describen en el manual de servicio de lamáquina.
© 2011 ARBURG GmbH + Co KG, Technische Dokumentation, D-72290 Loßburg, Tel. 07446 / 330
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
14/397
Introducción
. . \ S T R G - S W \ S - S W 4 0 X X \ E S 0 0_
B_
0 2_
4 0 0_
0 0 0 2 0 1 1 . 0
6 . 2
0 0 1
- 2 -
Contenido de la documentación Se presenta brevemente el MULTILIFT así como sus elementos de manejo.Las funciones se explican mediante pantallas de funciones.
No se incluyen ejemplos de aplicación ni recomendaciones sobre losdatos.
La última página de este manual la hemos reservado para usted. Lerogamos rellene los renglones bajo el título “Sus comentarios”.
Estructura del manual de servicio Este manual de servicio está compuesto por capítulos individuales eindependientes. No se han incluido algunos apartados o incluso capítuloscompletos ya que no forman parte de esta documentación.
Este manual de servicio puede incluir descripciones de opciones,accesorios o parámetros que no son de serie.
Las páginas de los capítulos están numeradas para que pueda localizar lasreferencias con más facilidad.
© 2011 ARBURG GmbH + Co KG, Technische Dokumentation, D-72290 Loßburg, Tel. 07446 / 330
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
15/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 1 -
Advertencias de seguridad
Advertencias de seguridady símbolos
En el manual de servicio se utilizan las denominaciones o símbolossiguientes para instrucciones especialmente importantes:
¡PELIGRO!
Daños para personas
Peligro inminente
Muerte por lesiones graves
¡ADVERTENCIA!Daños para personas
Posible situación peligrosa
Posibilidad de muerte o lesiones graves
¡ATENCIÓN!
Daños para personas
Situación menos peligrosaLesiones leves o de escasa consideración
¡CUIDADO!
Daños para objetos
Posible situación de daños
Daños
♦ de la máquina y sus ambiente,
♦ de los componentes procesables.
¡INFORMACIÓN!
Consejos de uso y otras informaciones e indicaciones importantes oútiles
Consecuencias no peligrosa o de daños para personas u objetos
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
16/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 2 -
Otros símbolos En este manual de servicio se utilizan frecuentemente los tres símbolossiguientes:
Seguridad Las máquinas de inyección producen durante el funcionamientopresiones altas, fuerzas grandes y temperaturas elevadas y puedenocasionar peligros para las personas. Las ALLROUNDER de ARBURG estánequipadas con dispositivos de seguridad adecuados para proteger laspersonas de accidentes.
Símbolo Explicación♦ Marca las enumeraciones
● Apremia al operador a realizar una acción○ Marca la reacción de la máquina o de la unidad de mando
ante de una acción
¡PELIGRO!¡Alta tensión!
El contacto con tensiones peligrosas puede causar heridas muygraves e incluso la muerte.
¡Desconecte siempre la corriente eléctrica antes de realizar cualquiertrabajo en zonas de alta tensión!
Los trabajos eléctricos los debe realizar exclusivamente el personalespecializado.
¡ADVERTENCIA!
¡Superficie muy caliente!
El contacto con superficies muy calientes puede ocasionarquemaduras graves.
Utilice siempre la ropa protectora y un protector facial cuando vaya arealizar trabajos en la zona de plastificación.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
17/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 3 -
¡ADVERTENCIA!
¡Plástico muy caliente!
El plástico caliente y el gas bajo presión de la unidad de plastificación
pueden producir quemaduras graves.
Zonas de peligro:
♦ orificio de salida de la boquilla,
♦ orificio de desgasificación (cilindro desgasificador),
♦ orificio de entrada.
Utilice ropa protectora y un protector facial para trabajar en laboquilla y en el cilindro de plastificación.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
18/397
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
19/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 5 -
¡Tenga en cuenta las advertencias anteriores de seguridad en loscapítulos del manual de servicio!
¡ADVERTENCIA!
¡Peligro de muerte a causa de mantenimiento inadecuado!
Los trabajos de mantenimiento y reparación en la instalación losdebe realizar exclusivamente el personal cualificado y enseñado.
Estas personas deben tener un conocimiento extenso de las normasnecesarias de seguridad y de los elementos de manejo.
¡Observe los trabajos y los intervalos descritos en el capítulo sobre elmantenimiento!
Además debe respetar los intervalos y realizar los trabajos decomprobación para la seguridad de personas y objetos. Estas normasestán establecidas por el organismo competente de su país.
También los trabajos en la máquina no descritos aquí, sólo lospueden realizar los técnicos del Servicio de Asistencia Técnica deARBURG.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
20/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 6 -
Protección contra accidentes ♦ Durante los trabajos en la instalación utilice ropa protectora (zapatosde seguridad, guantes de protección, protección de los ojos, …).¡Observe las prescripciones locales de seguridad para la seguridad defuncionamiento!
♦ La instalación completa debe estar lista. Eso es importante para suaptitud funcional y aumenta la seguridad para el personal de manejo.
♦ ¡No quite etiquetas de advertencia y de indicación e identificacionesde la máquina o de los dispositivos adicionales!
♦ Si para llenar la tolva del material se precisa un medio de subida, ¡sóloutilice los medios correspondientes a las normas de seguridad delpaís!
♦ ¡Durante el funcionamiento no ascienda en la bancada de la máquinani tampoco ponga la mano en la zona de caída de las piezas!
♦ ¡No ponga la mano en el orificio de llenado del material a tratar!
♦
¡Tenga en cuenta las normativas de tratamiento y de seguridad delfabricante del material!
♦ Al tratar materiales de tipo prejudicial para la salud, ¡utilice undispositivo de aspiración!
♦ ¡Desactive el motor para trabajar en la zona de movimiento de lainstalación! El sistema hidráulico completo debe encontrarse sinpresión. ¡Tenga especial cuidado con los acumuladores hidráulicos!
♦ Para trabajar en las zonas de componentes calientes (cilindro deplastificación, molde, etc.) es necesario tener en cuenta los puntossiguientes:
- La boquilla debe estar despegada del molde. La punta de la
boquilla y el molde deben estar separados.- ¡Al quitar tapones de material frío existe el peligro de quemadura
por la salida de plástico caliente del molde!
♦ ¡No utilice las superficies de la máquina como superficies de trabajo!
♦ ¡No realice trabajos de mantenimiento durante el funcionamiento!
♦ ¡Proteja los conductos contra las influencias perjudiciales por ejemplode ácidos y efectos mecánicos!
♦ ¡Compruebe el estado de seguridad en el trabajo de todos losconductos! Al constatar fugas, daños o fracturas se debe desactivarinmediatamente la instalación.
♦ ¡Desconecte la máquina de la corriente en caso de trabajos dereparación y de transformación! ¡Desactive el interruptor principal yasegúrelo para que no se vuelva a activar!
♦ ¡No permita el acceso a la máquina a personas no autorizadas!
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
21/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 7 -
Principio fundamental;uso conforme a lo previsto
♦ El MULTILIFT se ha construido siguiendo todas las reglas reconocidasen materia de seguridad y de la técnica. A pesar de ello, losoperadores o terceros pueden correr graves riesgos y/o causar dañosmateriales en el MULTILIFT u otros objetos.
♦ El MULTILIFT se debe utilizar solamente en perfecto estado técnico ypara el uso previsto. Las averías que puedan afectar a la seguridadfuncional se deben reparar (dejar reparar) inmediatamente. La zonade depósito/recogida del MULTILIFT tiene que estar protegida segúnlas normas vigentes de prevención de accidentes, por ej. medianteuna valla de protección o similares.
♦ El MULTILIFT se ha previsto exclusivamente para manipular piezassegún las instrucciones del fabricante. Todo uso fuera de lo indicado,así como el desmontaje y uso de los componentes individuales no estáconforme a lo previsto. La firma ARBURG no es responsable de ningúndaño que resulte de ello. El usuario es plenamente responsable.
La observancia del manual de servicio y el cumplimiento de las
instrucciones de inspección y mantenimiento también forman partedel uso conforme a lo previsto.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
22/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 8 -
Medidas de organización ♦ El manual de servicio y las Instrucciones resumidas deben estardisponibles en todo momento en el lugar de trabajo del MULTILIFT.
♦ Además del manual de servicio, se deben observar todos losreglamentos legales y de otro tipo de obligado cumplimiento enmateria de prevención accidentes y de protección del medioambiente. Tales obligaciones incluyen también, por ejemplo, elmanejo de materiales peligrosos, la puesta a disposición de equiposprotectores personales y la utilización de los mismos.
♦ Complete el manual de servicio con cualquier información pertinenterelacionada con el deber de supervisión y de notificación obligatoriapara así tener en cuenta cualquier particularidad a nivel de empresa,por ejemplo respecto a la organización y el flujo de trabajo o elpersonal empleado.
♦ El personal que trabaje con la máquina debe haber leído el manual deservicio y especialmente el capítulo dedicado a la seguridad antes dedar comienzo a los trabajos. Durante el trabajo es demasiado tarde
para empezar a leer el manual. Esto se aplica especialmente a aquellaspersonas que solamente trabajan esporádicamente con el MULTILIFT,por ejemplo durante el equipamiento o el mantenimiento.
♦ Ocasionalmente compruebe que el personal trabaja teniendo encuenta las medidas de seguridad y los riesgos y observando el manualde servicio.
♦ Utilice el equipo de seguridad personal siempre que sea necesario o siasí lo indica alguna disposición, especialmente si se trabaja conplásticos calientes, por ejemplo monte protecciones alrededor de lazona de peligro.
♦ ¡Observe todas las instrucciones de seguridad y los avisos de peligro
en el MULTILIFT!
♦ Mantenga completas y legibles todas las advertencias de seguridad yde peligro en el MULTILIFT.
♦ Si se producen cambios relevantes en materia de seguridad en elMULTILIFT o si se altera su funcionamiento, usted debe pararloinmediatamente y notificar la avería al organismo/personacompetente.
♦ No realice cambios en el MULTILIFT ni añada construccionessuplementarias que puedan afectar a la seguridad sin la oportunaautorización por escrito de ARBURG. Esto incluye también el montajey ajuste de equipos y válvulas de seguridad, así como la soldadura omodificaciones en la bancada de la máquina.
♦ Las piezas de recambio deben cumplir los requisitos técnicosestablecidos por ARBURG. Esto siempre queda garantizado con laspiezas de recambio originales.
♦ ¡No modifique la programación (software) de los sistemas de pilotajeprogramables si no cuenta con una autorización explícita!
♦ ¡Cambie las mangueras neumáticas en los plazos indicados oadecuados aunque no haya defectos visibles que puedan afectar a laseguridad!
♦ ¡Cumpla los plazos prescritos y los indicados en el manual de servicio
para los controles e inspecciones periódicos!
♦ Para realizar los trabajos de mantenimiento es imprescindible utilizarun equipamiento adecuado.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
23/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 9 -
Selección y capacitación delpersonal; obligacionesfundamentales
♦ Los trabajos en el MULTILIFT los debe realizar exclusivamente elpersonal de confianza.
♦ Trabaje exclusivamente con personal bien formado o instruido, concompetencias claramente definidas en las tareas de manejo,equipamiento, mantenimiento y reparación.
♦ El personal en proceso de capacitación, aprendizaje o que realice unaformación de tipo general solamente deberá trabajar en el MULTILIFTo en la instalación bajo el control permanente de una personaexperimentada.
♦ Los trabajos en los equipos eléctricos del MULTILIFT solamente losdebe realizar un electricista profesional o personas instruidas bajo ladirección y supervisión de un electricista profesional conforme a lasnormas electrotécnicas.
Instrucciones de seguridadrelacionadas con determinadasfases de servicioFuncionamiento normal
♦ ¡No realice ningún trabajo que sea considerado peligroso!
♦ ¡Tome las medidas correspondientes para que el MULTILIFT sólo sepueda operar en estado seguro y operativo! Utilice la máquinasolamente si dispone de todas las instalaciones de protección yseguridad - por ejemplo instalaciones de protección desmontables, deparada de emergencia, de aspiración - y si éstas se encuentran enestado operativo.
♦ ¡Compruebe frecuentemente si el MULTILIFT tiene daños o defectosvisibles! ¡Informe inmediatamente a la sección / persona competentesobre cualquier cambio incluyendo el comportamiento funciona! ¡Encaso necesario, detenga y asegure el MULTILIFT inmediatamente!
♦ ¡En caso de disfunción, detenga y asegure el MULTILIFTinmediatamente! ¡Las averías se deben reparar inmediatamente!
♦ ¡Observe los procesos de arranque y parada, así como las indicacionesde vigilancia y de control según el manual de servicio!
♦ ¡Antes de conectar/poner en marcha el MULTILIFT, cerciórese de queesto no ponga en peligro para nadie!
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
24/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 10 -
Trabajos especiales durante eluso del MULTILIFT y elmantenimiento, así como lareparación de averías en eltranscurso del trabajo;
eliminación de residuos.
♦ ¡Realice y respete los trabajos y plazos previstos en el manual deservicio para el ajuste, el mantenimiento y la inspección, incluyendolas instrucciones para la sustitución de piezas/componentes! Dichostrabajos sólo los debe llevar a cabo personal especializado.
♦ ¡Informe a los operadores antes de realizar trabajos especiales o demantenimiento!
♦ ¡Si es necesario, asegure la zona de mantenimiento con un espacio losuficientemente amplio!
♦ Si el MULTILIFT se desconecta por completo durante trabajos demantenimiento y de reparación, ésta se debe bloquear en posición deabierto. Para ello, asegure el interruptor principal con un candado yquite la llave y/o sitúe una señal de aviso en el interruptor principal.
♦ Está terminantemente prohibido permanecer debajo del eje deinmersión vertical o de la carga flotante. En caso de que la transmisiónde movimiento estuviera en mal estado, existe un peligro físico grave
e incluso peligro de muerte si cayeran el eje o la carga.♦ Para los trabajos de montaje, mantenimiento u otros a una altura
fuera del alcance del operador, utilice escalerillas y plataformas detrabajo conformes a lo establecido en materia de seguridad. No utiliceelementos de la máquina como soporte! ¡Elimine cualquier tipo deobstáculo del campo de trabajo del MULTILIFT!
♦ ¡Al comenzar los trabajos de mantenimiento/reparación, limpie elMULTILIFT y especialmente las conexiones y racores del mismo,eliminando aceite, combustibles o conservantes! ¡No utilice agenteslimpiadores agresivos! ¡Utilice trapos sin hilos!
♦ Tras la limpieza, compruebe si los conductos neumáticos tienen
alguna fuga, si hay elementos de unión aflojados, así como puntos derozamiento o averías. ¡Repare inmediatamente cualquier defecto!
♦ ¡Al realizar trabajos de mantenimiento y reparación, apriete con el parnecesario las uniones atornilladas que se hayan aflojado!
♦ Si es necesario desmonte los dispositivos de seguridad para realizartrabajos de equipamiento y reparación, monte y revise de nuevo losdispositivos comprobando su estado operativo tan pronto como sehayan concluido los citados trabajos.
♦ Los combustibles, los materiales auxiliares y las piezas intercambiablesse deben eliminar de manera segura y no perjudicial para el medio
ambiente! Respete las instrucciones del fabricante del material.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
25/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 11 -
Advertencias sobre peligrosespecialesenergía eléctrica
♦ ¡Utilice solamente fusibles originales con los valores prescritos! ¡Encaso de avería en el sistema de alimentación de energía eléctrica,detenga la instalación inmediatamente!
♦ Al realizar trabajos de inspección, mantenimiento y reparación en elarmario de mando o en otras piezas bajo tensión, usted debe eliminarla tensión de las piezas del MULTILIFT, en caso de que así se indique.¡Compruebe primero si los componentes están libres de tensión y, acontinuación, proceda a dar tierra, cortocircuitar y aislar cualquiercomponente adyacente que esté bajo tensión!
♦ Someta el equipamiento eléctrico del MULTILIFT a una inspecciónperiódica. Cualquier defecto, como elementos de unión aflojados ocables quemados, se debe reparar sin demora.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
26/397
ADVERTENCIAS DE SEGURIDAD
\ \ A R B F S 0 2 \ G - D O K U \ D O D - W O R K \ B A U S T E I N E \ E S \ S T R G - S W
\ S - S W 4 0 X X \
E S 0 0_
C B_
0 2_
4 0 0_
0 0 1 2 0 1 2 . 0
5 . 1
6
- 12 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
27/397
Descripción general del MULTILIFT SELECT
. . \ T E C H - D A T \ M L I F T V S \ E S 0 0_
D A_
0 0_
5 4 0 9_
0 0 2
2 0 1 0 . 0 4
. 2 6
- 1 -
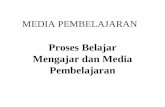
Descripción general del MULTILIFT SELECT
El MULTILIFT SELECT es un sistema de robot para la extracción y eldepósito de piezas inyectadas con las máquinas ALLROUNDER. Ademásde las funciones de extracción y depósito también se puede utilizar elMULTILIFT para introducir insertos en el molde.
Los ejes principales disponen de accionamiento servoeléctrico, quepermite movimientos veloces y simultáneos con repetibilidad elevada. Losejes secundarios (bascular o girar la agarre) son neumáticos.
El MULTILIFT está equipado con dispositivo de vacío para el agarre. Lasconexiones del vacío se sitúan cerca del agarre, así se pueden conectar las
ventosas muy velozmente. Unos vacuestatos integrados comprueban silas piezas se encuentran en el agarre.
Una interfase con 8 entradas programables también se sitúa cerca delagarre. Mediante estas entradas es posible consultar interruptores ysensores del agarre, que permiten una vigilancia segura.
El sistema eléctrico (4) completo, incluyendo las interfases de la máquina,está integrado en el soporte (1) del MULTILIFT. Esto permite de utilizar elMULTILIFT con otras máquinas, que sean equipadas con interfasesadecuadas.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
28/397
Descripción general del MULTILIFT SELECT
. . \ T E C H - D A T \ M L I F T V S \ E S 0 0_
D A_
0 0_
5 4 0 9_
0 0 2
2 0 1 0 . 0 4
. 2 6
- 2 -
El manejo del MULTILIFT se realiza mediante la programación del ciclo dela unidad de mando SELOGICA. El registro de datos del MULTILIFT estáintegrado en el de la máquina.
1 Soporte2 Eje X
3 Eje Y4 Sistema eléctrico5 Unidad neumática de mantenimiento
6 Eje Z ( 0 0 2 1 0 1_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
29/397
Descripción general del MULTILIFT SELECT
. . \ T E C H - D A T \ M L I F T V S \ E S 0 0_
D A_
0 0_
5 4 0 9_
0 0 2
2 0 1 0 . 0 4
. 2 6
- 3 -
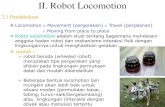
Para la seguridad de la zona de peligro la máquina está equipada con tresinterruptores de seguridad, dos pulsadores de parada de emergencia yuna tecla de confirmación.
Este dispositivo de seguridad está cableado completamente en la
interfase (EUROMAP 73) y se encuentra cerca de la puerta de la valla deprotección.
Entre la valla de protección (1) puede montar una cinta transportadora (2)para alejar las piezas de la zona de peligro del sistema de robot.
( 0 0 2 1 0 2_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
30/397
Descripción general del MULTILIFT SELECT
. . \ T E C H - D A T \ M L I F T V S \ E S 0 0_
D A_
0 0_
5 4 0 9_
0 0 2
2 0 1 0 . 0 4
. 2 6
- 4 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
31/397
Introducción
. . \ M A S C H I N E \ T R E N N B L A T T_
T Y P_
6 \ E S 0 1_
I . F M
0 1 2
0 0 5 . 0 8 . 3 1
- 1 -
1 Introducción
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
32/397
Introducción
. . \ M A S C H I N E \ T R E N N B L A T T_
T Y P_
6 \ E S 0 1_
I . F M
0 1 2
0 0 5 . 0 8 . 3 1
- 2 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
33/397
MULTILIFT SELECT 15
INTEGRALPICKER MULTILIFT
Datos técnicos
w w w . a r b u r g . c o m
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
34/397
2
P
220
G
D A
K
1 9 5
1 5 7
C
B 2 )
R
M 1
)
N S
L
MULTILIFT SELECT 15 Datos técnicos
1) Posibilidad de cinta transportadora ancha junto con prolongación del eje Z2) Posibilidad de aumento de la altura de sobrepaso en 200 mm opcionalmente
Supercie de sujeción plato jo del molde
Carrera eje X
min. 180
E
Carrera eje Z
Cinta transportadorasuministrable opcionalmente
Campo de trabajo
Cubierta de protecciónsuministrableopcionalmente
C a
r r e r a e j e Y
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
35/397
3
Datos técnicos
Modelo de máquina Medida A Medida B 1) Medida C Medida D Medida E Medida G
Estándar Estándar Estándar max. Estándar prolongada*)
570 A 1.408 582 3.800 1.170 150 1.680 2.080 / 2.480 720 A 1.543 554 4.210 1.182 150 2.080 2.480 / 2.880
570 E 1.408 582 3.800 1.170 150 1.680 2.080 / 2.480
570 H 1.408 582 3.800 1.170 150 1.680 2.080 / 2.480
720 H 1.543 554 4.210 1.182 150 2.080 2.480 / 2.880
920 H 1.676 549 4.470 1.440 220 2.010 2.410 / 2.810
570 S 1.408 582 3.800 1.170 150 1.680 2.080 / 2.480
630 S 1.458 534 3.850 1.216 220 2.010 2.410 / 2.810
720 S 1.533 554 4.200 1.172 150 2.080 2.480 / 2.880
820 S 1.598 549 4.330 1.302 150 2.080 2.480 / 2.880
920 S 1.668 549 4.460 1.432 220 2.010 2.410 / 2.810
570 C GOLDEN EDITION 1.358 582 3.750 1.120 150 1.680 2.080 / 2.480
720 S GOLDEN EDITION 1.533 554 4.200 1.172 150 2.080 2.480 / 2.880
920 S GOLDEN EDITION 1.668 549 4.460 1.432 220 2.010 2.410 / 2.810
*) Opcional1) Posibilidad de aumento de la altura de sobrepaso en 200 mm opcionalmente2) Posibilidad de cinta transportadora ancha junto con prolongación del eje Z
MULTILIFT SELECT 15
Modelo de máquina Medida K Cinta transportadora Medida N Medida P Medida R *) Medida S
Medida L Medida M2) Estándar prolongada*) Estándar prolongada
570 A 2.230 2.000 600 965 650 1.050 / 1.450 1.915 2.315 / 2.715 800
720 A 2.440 2.500 800 1.210 765 1.165 / 1.565 2.175 2.575 / 2.975 1.085
570 E 2.230 2.000 600 965 650 1.050 / 1.450 1.915 2.315 / 2.715 800
570 H 2.230 2.000 600 965 650 1.050 / 1.450 1.915 2.315 / 2.715 800
720 H 2.440 2.500 800 1.210 765 1.165 / 1.565 2.175 2.575 / 2.975 1.085
920 H 2.700 2.500 800 1.320 580 980 / 1.380 2.290 2.690 / 3.090 1.200
570 S 2.230 2.000 600 965 650 1.050 / 1.450 1.915 2.315 / 2.715 800
630 S 2.275 2.500 600 1.205 695 1.095 / 1.495 2.175 2.575 / 2.975 1.085
720 S 2.430 2.500 800 1.210 765 1.165 / 1.565 2.175 2.575 / 2.975 1.085
820 S 2.560 2.500 800 1.210 765 1.165 / 1.565 2.175 2.575 / 2.975 1.085
920 S 2.690 2.500 800 1.210 695 1.095 / 1.495 2.175 2.575 / 2.975 1.085
570 C GOLDEN EDITION 2.180 2.000 600 730 835 1.235 / 1.635 1.930 2.330 / 2.730 615
720 S GOLDEN EDITION 2.430 2.500 800 1.045 1.000 1.400 / 1.800 2.190 2.590 / 2.990 850
920 S GOLDEN EDITION 2.690 2.500 800 1.045 930 1.330 / 1.730 2.190 2.590 / 2.990 850
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
36/397
4
Ejes principales
Eje B
Eje C
MULTILIFT SELECT 15 Datos técnicos
Estándar prolongada *) Estándar prolongada *) Estándar prolongada *) Estándar
max. kg mm mm max. mm/s mm mm max. mm/s mm mm max. mm/s kg
570 A 15 1.600 2.000 / 2.400 2.400 1.000 1.200 3.000 700 900 1.800 500
720 A 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
570 E 15 1.600 2.000 / 2.400 2.400 1.000 1.200 3.000 700 900 1.800 500
570 H 15 1.600 2.000 / 2.400 2.400 1.000 1.200 3.000 700 900 1.800 500
720 H 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
920 H 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
570 S 15 1.600 2.000 / 2.400 2.400 1.000 1.200 3.000 700 900 1.800 500
630 S 15 2.000 2.400 / 2.800 2.400 1.000 1.200 3.000 700 900 1.800 530
720 S 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
820 S 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
920 S 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
570 C GOLDEN EDITION 15 1.600 2.000 / 2.400 2.400 1.000 1.200 3.000 700 900 1.800 500
720 S GOLDEN EDITION 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
920 S GOLDEN EDITION 15 2.000 2.400 / 2.800 2.400 1.200 1.400 3.000 700 900 1.800 530
Modelo de máquina Eje C Eje B*)
Par 2) Peso Par 2) Peso
Nm kg Nm kg
570 A 28 2,6 14 3,5
720 A 28 2,6 14 3,5
570 E 28 2,6 14 3,5
570 H 28 2,6 14 3,5
720 H 28 2,6 14 3,5
920 H 28 2,6 14 3,5
570 S 28 2,6 14 3,5
630 S 28 2,6 14 3,5
720 S 28 2,6 14 3,5
820 S 28 2,6 14 3,5
920 S 28 2,6 14 3,5
570 C GOLDEN EDITION 28 2,6 14 3,5
720 S GOLDEN EDITION 28 2,6 14 3,5
920 S GOLDEN EDITION 28 2,6 14 3,5
Ejes secundarios (ejes del agarre)
*) Opcional1) Garra más peso de la pieza más peso de ejes secundarios (eje B, C)2) Con 6 bar de nivel de presión
Modelo de máquina Peso en Eje Z Eje Y Eje X Peso
la garra1) Carrera Velocidad Carrera Velocidad Carrera Velocidad Robot
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
37/397
5
Equipamiento MULTILIFT SELECT 15
Máquina base
Opcional
La condición para poder utilizar
el MULTILIFT SELECT es una
ARBURG ALLROUNDER.
Ejes
Ejes principales con acciona-
miento servoeléctrico para
movimientos de desplazamiento
simultáneos y rápidos con una
precisión de repetición elevada
Eje C con accionamiento neu-
mático para bascular las piezas
terminadas
○ Eje B con accionamiento neu-
mático para depositar las piezas
terminadas en dos posicionesdistintas
Válvulas neumáticas para
la garra
Válvulas neumáticas para control
de las funciones de agarre como
por ejemplo de garras, pinzas,
cilindros, unidades de elevación
y giro (véase la información
adicional):
- 1 con posición central blo-
queada (5/3)
○ Válvulas neumáticas adicionales(máximo 5) combinables a volun-
tad en las siguientes versiones
(véase la información adicional):
- con posición central bloqueada
(5/3)
- con posición central con purga
de aire (5/3)
Todas las válvulas neumáticas
están conectadas hasta la brida
de la garra a acoplamientos de
cierre rápido
Dispositivo de vacío para
dispositivos de agarre
Dispositivo de vacío (principio
Venturi) para la manipulación
de piezas con ventosas
○ Dispositivos de vacío adicionales
(máximo 3)
Todos los dispositivos de vacío
conectados cerca de la garra.
Inclusive vacuestato para la vigi-lancia de piezas
○ Función de soplado para la trans-
ferencia segura de las piezas
Unidad de mantenimiento
neumática
Reductor de presión del ltro
con ajuste manual para ajustar
el nivel de presión
Función de conexión / desco-
nexión eléctrica
Unidad de pilotaje Programación del ciclo con
representación simbólica
mediante SELOGICA Función de
autoaprendizaje para programa-
ción del ciclo de fácil uso
Selección de pantallas mediante
teclas de función y salto directo
Indicación de pasos de ciclo en
el diagrama de ujo
Sistema de robot desplazable
al mismo tiempo que se realiza
el ciclo
Tres velocidades distintas selec-cionables en modo manual
para una programación rápida
y segura. Los ejes pueden des-
plazarse de forma continua o
incremental (0,1 mm, 1 mm
o 10 mm)
Ramicaciones de ciclo pro-
gramables para la separación
segura de pruebas al azar, piezas
defectuosas y bebederos
Juego de datos del sistema del
robot integrado en el juego de
datos de la máquina de inyección
○ Movimientos sincronizados del
sistema de robot con desplaza-
mientos de expulsor y apertura
del molde
Interfaz entre el sistema de robot
y la máquina de inyección
○ Panel de mandos móvil ARBURG
Mobile SELOGICA (AMS) para
un manejo sencillo y exible
Entradas/salidas para
dispositivos de agarre
Interfaz con 8 entradas libre-
mente programables para la
comprobación de los sensores de
las funciones de la garra. Todas
las entradas cableadas a enchufe,
inclusive contraconector
○ Interfaz adicional para compro-
bar otros 8 sensores
Salidas libremente programa-
bles para control de las válvulasneumáticas de las funciones de
la garra. Todas las salidas conec-
tadas directamente a las válvulas
neumáticas
Entradas/salidas para periféricos
Interfaz (libre de potencial) con
4 entradas y salidas libremente
programables para equipos peri-
féricos. Conectadas a enchufe
de 42 polos en el MULTILIFT,
inclusive contraconector
○ Interfaz adicional (libre depotencial) con 4 entradas y sali-
das libremente programables.
Conectadas a enchufe de 42
polos en el MULTILIFT, inclusive
contraconector
○ Interfaz adicional (24V DC) con
16 entradas y salidas libremente
programables. Conectadas
a enchufe de 72 polos en el
MULTILIFT (inclusive contra-
conector) o en el armario de
mando de la máquina
Dispositivos de seguridad
○ Equipamiento eléctrico para
asegurar una puerta en la valla
de protección, completamente
conectado en la máquina con la
siguiente dotación:
- 2 pulsadores de parada de
emergencia
- 1 pulsador de conrmación - 3 conmutadores para puerta
○ Dispositivo de protección en la
reja ondulada para alojamiento
del sistema de robot
Otras opciones
○ Cinta transportadora para depó-
sito de las piezas, inclusive inter-
faz y tecla de vaciado
○ Garra de retirada de ajuste
universal con hasta 8 ventosas.
Dimensiones y versión adaptadas
al modelo de máquina y laaplicación
○ Pinza para retirar los
bebederos, neumática
con retorno por resorte
Información adicional
- Válvula neumática 5/3 con
posición central bloqueada para
las funciones de la garra cuya
posición deba mantenerse con
la válvula sin accionar, como
por ejemplo con la puerta deprotección abierta, parada de
emergencia
- Válvula neumática 5/3 con posi-
ción central con purga de aire
para las funciones de la garra
que deban activarse despresuri-
zadas con la válvula sin accionar,
como por ejemplo para garanti-
zar una transferencia cuidadosa
de la pieza por parte del expul-
sor del lado de la máquina
- Válvula neumática 5/2 con
retorno por resorte para funcio-
nes de la garra con retorno por
resorte, como por ejemplo en
el caso de pinzas para retirar los
bebederos o cilindros neumáti-
cos simples
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
38/397
6
Ø 5 H7 Ø 6,6
Ø 11
1 5
7 5
1 9 0
E
8
80 ±0,02
50 ±0,02
100
8 0 ± 0 , 0 2
5 0 ± 0 , 0 2
1 0 0
Adaptaciones de la garra
Asignación interfaz X001 entradas de garra S 5001 - S 5008
N.º de pin Función Denominación N.º de pin Función Denominación
1 S 50012 + 24 V Entrada de garra 1
3 GND
4 S 5002
5 + 24 V Entrada de garra 2
6 GND
7 S 5003
8 + 24 V Entrada de garra 3
9 GND
10 S 5004
11 + 24 V Entrada de garra 4
12 GND
13 PE
14 S 500515 + 24 V Entrada de garra 5
16 GND
17 S 5006
18 + 24 V Entrada de garra 6
19 GND
20 S 5007
21 + 24 V Entrada de garra 7
22 GND
23 S 5008
24 + 24 V Entrada de garra 8
25 GND
Elemento E: brida de la garra del eje de inmersión
MULTILIFT SELECT 15
Conexiónneumática eje C
Interfaz X 001-X 002Entradas de garraS 5001-S 5016
Asignación interfaz X 011entradas de garraEje B y C neumáticos
Conector para vacíoVa1-Va4 para tamañode manguera DA6 / DI 4
Acoplamientos de cierre rápidoneumáticos Pn1-Pn12 para tamañode manguera DA6 / DI 4
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
39/397
7
D I N
Ejes secundarios MULTILIFT SELECT 15
Situación detaladros verelemento E,brida de garra
Eje B (neumático)
Eje C (neumático)
Situación detaladros verelemento E,brida de garra
107 101 130
8 7
0°
90° o 180°
2338
Ø 100
1 5 7
0°
90°
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
40/397
6 8 0 4 4 8_
E S_
0 3 2 0 1 2 · S a l v o m o d i f c a c i ó n
Calidad ARBURG GmbH + Co KG:
certicada según DIN EN ISO 9001 + 14001
ARBURG GmbH + Co KGPostfach 1109 · 72286 Lossburg · Tel.: +49(0)7446 33-0 · Fax: +49(0)7446 33-3365 · www.arburg.com · e-mail: [email protected]
Con emplazamientos en Europa: Alemania, Bélgica, Dinamarca, Francia, Gran Bretaña, Italia, Holanda, Austria, Polonia, Suiza, Eslovaquia, España, República Checa,
Turquía, Hungría | Asia: China, Indonesia, Malasia, Singapur, Tailandia, Emiratos Árabes Unidos | América: Brasil, México, EE.UU. Encontrará más información en
www.arburg.com
© 2012 ARBURG GmbH + Co KGQuedan reservados los derechos de autor de este folleto. Para cualquier uso que no esté expresamente permitido en virtud de la legislación sobre la propiedad intelectual, se deberá solicitarpreviamente una autorización a ARBURG.
Todos los datos, así como la información técnica se han compilado con el esmero debido. Sin embargo, no ofrecemos ninguna garantía sobre la exactitud de los mismos. Las ilustraciones y lainformación pueden diferir del estado de la máquina en el momento de la entrega. En lo que a la instalación y al funcionamiento de la máquina se reere, solamente será determinante el manualde servicio del modelo correspondiente.
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
41/397
Transporte del MULTILIFT SELECT
1.1.2
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A B_
6 1_
5 4 0 9_
0 0 0
2 0 1 0 . 0
5 . 0
6
- 1 -
1.1.2 Transporte del MULTILIFT SELECT
Según el tamaño de la máquina y la prolongación del eje Z el MULTILIFTestá desmontado de la máquina y es suministrado en una paleta
separada.
El peso sin embalaje es aprox de 530 - 600 kg.
Puede transportar el MULTILIFT en la paleta con una carretilla de horquillaelevadora al lugar de montaje de la máquina.
I N S T R U C C I O N E S D E S E G U R I D A D ¡No enganche a las cintas de transporte el sistema de robot con la
paleta!
¡Antes del transporte del sistema de robot bloquee los ejes demovimiento y asegúrelos para que no se desplacen!
¡No eleve de ninguna manera el sistema de robot por los perfiles dealuminio de los ejes X e Y!
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
42/397
Transporte del MULTILIFT SELECT
1.1.2
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A B_
6 1_
5 4 0 9_
0 0 0
2 0 1 0 . 0
5 . 0
6
- 2 -
Este sistema de robot para el transporte está equipado con cintas detransporte.
● Enganche el MULTILIFT con las cintas de transporte a la grúa.
● Distienda las cintas de transporte mediante la grúa.
● Retire los tornillos, que fijan el MULTILIFT a la paleta.
● Levante el MULTILIFT.
● ¡Tenga en cuenta el centro de gravedad!
● Transporte el MULTILIF al lugar de montaje.
O B S E R V A R
Las cintas de transporte (1) non se pueden restituir.
( 0 0 3 8 9 9_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
43/397
Montaje del MULTILIFT SELECT
1.1.3
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A C_
1 0_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2 7
- 1 -
1.1.3 Montaje del MULTILIFT SELECT
La máquina en que se monta el MULTILIFT debe ser instalada y conectadacomo se describe en el manual de servicio.
● Limpie la superficie de montaje en el plato fijo de sujeción delmolde (2).
● Prepare los 4 tornillos de cabeza cilíndrica (1) suministrados para elMULTILIFT.
● Levante el MULTILIFT con la superficie de montaje sobre el plato fijode sujeción del molde (2).
● Baje lentamente el MULTILIFT.
● Sujete el MULTILIFT mediante los tornillos de cabeza cilíndrica (1).
● Apriete los tornillos de cabeza cilíndrica hasta 604 Nm.
● Quite la grúa y las correas de transporte.
I N S T R U C C I O N E S
D E S E G U R I D A D Antes del montaje del sistema de robot, compruebe todos lostornillos si estén apretados correctamente. ¡De lo contrario existeriesgo de accidente a causa del movimiento de los ejes y por eldesplazamiento del centro de gravedad!
Para sujetar el MULTILIFT sólo utilice los tornillos de cabeza cilíndricasuministrados y apriételos con el par correcto.
( 0 0 2 1 0 5_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
44/397
Montaje del MULTILIFT SELECT
1.1.3
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A C_
1 0_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2 7
- 2 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
45/397
Retirar los seguros de transporte
1.1.4
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A D_
6 1_
5 4 0 9_
0 0 0
2 0 1 0 . 0
5 . 0 6
- 1 -
1.1.4 Retirar los seguros de transporte
Requisito El MULTILIFT está montado y sujetado. Se han quitado las correas detransporte y la grúa del campo de trabajo.
● Retire los seguros de transporte (1) y (2), véase ilustración.
● Guarde los componentes del seguro de transporte y las bridas para
suspensión.
● Monte de nuevo los seguros de transporte y las bridas parasuspensión si debe transportar el MULTILIFT.
( 0 0 3 9 0 1_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
46/397
Retirar los seguros de transporte
1.1.4
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A D_
6 1_
5 4 0 9_
0 0 0
2 0 1 0 . 0
5 . 0 6
- 2 -
Retirar los cáncamos ● Retire los dos cáncamos (1) utilizados para las cintas de transporte.
1 Retirar los cáncamos
2 Obturar los taladros
● Obture los taladros mediante los tapones suministrados (1),N° ref. 106.143.
( 0 0 3 9 0 2_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
47/397
Conexión eléctrica
1.1.5
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A E_
6 1_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 1 -
1.1.5 Conexión eléctrica
Requisito El MULTILIFT está montado en la máquina según el capítulo 1.1.3.
● Desconecte el interruptor principal y asegúrelo para que no se puedaconectar accidentalmente.
Interfases Para la conexión eléctrica la máquina está equipada con las interfasessiguientes:
♦ interfase EUROMAP 67 (X134),
♦ interfase VARAN-BUS (X831F),
♦ interfase EUROMAP 73 (X500),
♦ conector CEE (alimentación de corriente) (X066).
● Conecte el conector de 50 polos (1) del MULTILIFT al enchufe X134 (1)de la máquina.
● Conecte el conector VARAN (4) del MULTILIFT al enchufe X831F de lamáquina.
( 0 0 3 9 0 3_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
48/397
Conexión eléctrica
1.1.5
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A E_
6 1_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 2 -
● Conecte el conector CEE al enchufe CEE X066 (3) al final de labancada de la máquina.
● Ahora monte la valla de protección según el capítulo 1.1.7.
( 0 0 2 1 0 9_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
49/397
Conexión neumática
1.1.6
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A F_
1 3_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 1 -
1.1.6 Conexión neumática
Para accionar los ejes neumáticos el MULTILIFT debe estar conectado a lared de aire comprimido. Esto se realiza mediante la unidad de
mantenimiento neumática (1).
Conexión del MULTILIFT SELECT: DN 8.
La unidad de mantenimiento está montada en el soporte del MULTILIFT.
Unidad de mantenimiento
I N S T R U C C I O N E S D E S E G U R I D A D Antes de realizar trabajos en la instalación neumática, accione el
interruptor de parada de emergencia y elimine la presión residualacumulada.
Existe riesgo de lesiones debido a los movimientos incontrolados delos accionamientos neumáticos.
● Conecte el conducto de aire comprimida (2) al racor (4) de la consola yfíjelo con abrazadera de manguera. La presión de la red de airecomprimido debe ser como máximo 16 bar.
● Asegúrese de que el aire comprimido esté limpio.
( 0 0 3 9 0 4_
0 0_
0 0 0
0 0 4 1 3
7_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
50/397
Conexión neumática
1.1.6
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A F_
1 3_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 2 -
Ajustar la presión de trabajo El MULTILIFT se opera con un nivel de presión de 6 bar.
● Antes de la puesta en marcha compruebe la presión de trabajo en elmanómetro de la unidad de mantenimiento y, en caso de desviación,ajuste la presión a 6 bar.
La presión se ajusta en la válvula reguladora de presión de la unidad de
mantenimiento.
● Para ajustar la presión abra los tornillos (1) en la cubierta (3).
● Abra la cubierta (3) hacía abajo.
( 0 0 3 9 0 5_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
51/397
Conexión neumática
1.1.6
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A F_
1 3_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 3 -
Activar el aire comprimido Puede activar y desactivar el aire comprimido mediante la unidad demando SELOGICA.
● Abra la siguiente página de parámetros:
Selección funciones adicionales
Aire comprimido
f9137 Aire comprimido
Con esta función activa y desactiva el aire comprimido.
Dispone de las siguientes opciones:
♦ 0 = desactivado,
♦ 1 = activado,
♦ 2 = desactivado en standby
( 0 0 2 1 1 3_
D E_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
52/397
Conexión neumática
1.1.6
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A F_
1 3_
5 4 0 9_
0 0 0
2 0 1 1 . 0
7 . 2
7
- 4 -
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
53/397
Montaje del dispositivo de protección
1.1.7
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A G_
0 2_
5 4 0 9_
0 0 2
2 0 1 0 . 0
7 . 2 8
- 1 -
1.1.7 Montaje del dispositivo de protección
Se debe asegurar la zona de peligro MULTILIFT mediante un dispositivode protección separador.
El dispositivo de protección opcional se compone de elementos de vallade protección suministrados aparte en una paleta.
● Monte los elementos de valla de protección según la ilustración yfíjelos a la máquina. Para el montaje de la valla de protección seprecisan dos personas.
● Monte primero la parte lateral derecha con la abertura para la cintatransportadora y fíjela a la máquina.
● Para ello introduzca y apriete los tornillos laterales del bastidor en losagujeros oblongos (1 y 2) de la máquina.
( 0 0 2 1 1 4_
0 0_
0 0 0
0 0 2 1 1
5_
0 0_
0 0 0
0 0 2 1 1 6_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
54/397
Montaje del dispositivo de protección
1.1.7
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A G_
0 2_
5 4 0 9_
0 0 2
2 0 1 0 . 0
7 . 2 8
- 2 -
● Introduzca de arriba la parte frontal (reja de alambre ondulado) en eltornillo de cono (2) del bastidor de la parte lateral 1.
● Empuje hacía abajo la reja de alambre ondulado hasta que las piezasdistanciadoras (1) se encajen en los tornillos de cono (2).
● Apuntale la parte frontal de la valla de protección en el lado opuestocon una base.
● Monte la cinta transportadora.
● Ahora monte la parte lateral 2 con la puerta y también introduzca dearriba la parte frontal en los tornillos de cono (2).
● Acerque la valla de protección a la máquina.
● Alinee la valla de protección paralelamente a la máquina.
● Introduzca debajo de cada bastidor (3) una chapa de base (5).
● Ajuste verticalmente los bastidores (3) mediante los tornillosprisioneros (4).
● Fije en el suelo los bastidores de la valla de protección mediantematerial adecuado de sujeción.
( 0 0 4 9 1 0_
0 0_
0 0 0
0 0 4 9 1
2_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
55/397
Montaje del dispositivo de protección
1.1.7
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A G_
0 2_
5 4 0 9_
0 0 2
2 0 1 0 . 0
7 . 2 8
- 3 -
Desmontaje de lavalla de protección
En caso de desmontaje de la valla de protección (por ej. para untransporte) precisa el juego de llaves N° ref. 288.386 de las herramientasde la máquina.
● Introduzca una llave (1) en cada ojo de la cerradura (2) de las piezas
distanciadoras del elemento de valla de protección que se debedesmontar (véase la ilustración).
● Gire las llaves de 180 °.
● Empuje hacía abajo el elemento de valla de protección.
● Retire las llaves y guárdelas en las herramientas de la máquina.
I N S T R U C C I O N E S D E S E G U R I D A D
● Asegure los bastidores y los elementos de valla de protección
durante el desmontaje para que no caigan.○ ¡De lo contrario existe peligro de lesiones y de daños a causa de la
caída de bastidores y elementos de valla de protección noasegurados!
( 0 0 4 9 1 1_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
56/397
Montaje del dispositivo de protección
1.1.7
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 A G_
0 2_
5 4 0 9_
0 0 2
2 0 1 0 . 0
7 . 2 8
- 4 -
O B S E R V A R
Para el montaje de la valla de protección también puede encargar aun técnico del Servicio de Asistencia ARBURG.
El técnico del Servicio de Asistencia ARBURG además efectúa lacertificación y la marcación CE.
Conexión eléctrica parala valla de protección
La valla de protección está asegurada mediante interruptores deseguridad, que se deben conectar por la interfase EUROMAP 73 a launidad de mando de la máquina.
El cable (1) con el conector (3) ya está cableado en el bastidor (2) de lapuerta de la valla de protección.
● Conecte el conector (3) en la interfase EUROMAP 73.
( 0 0 2 1 1 8_
0 0_
0 0 0 )
B A M_
6 0 3 9 1 0_
0 0 0_
E S_
1 0
8/18/2019 Robot Arburg Para Arburg 720S 3200-2100
57/397
Visión de conjunto de los dispositivos de protección
1.2.1
. . \ T E C H - D A T \ M L I F T V S \ E S 0 1 B A_
3 4_
5 4 0 9_
0 0 0 . F
M
2 0 0
Copyright © 2022 FDOKUMEN