REFURBISHING SISTEM KENDALI SUHU TUNGKU SINTER...
12
Achmad Suntoro ISSN 0216 - 3128 63 REFURBISHING SISTEM KENDALI SUHU TUNGKU SINTER PELET UO 2 Achmad Suntoro Pusat Pengembangan Perangkat Nuklir – BATAN ABSTRAK REFURBISHING SISTEM KENDALI SUHU TUNGKU SINTER PELET UO2. Telah dilakukan refurbishing sistem kendali suhu tungku sinter pelet UO2 yang ada di P2TBDU-BATAN Serpong. Refurbishing ini dilakukan karena beberapa komponen kendali suhu sistem tungku tidak diproduksi lagi oleh pabrik pembuatnya. Langkah teknis engineering berupa batasan-disain, disain, konstruksi dan pengujian dijelaskan dalam makalah ini. Dari data pengujian menggunakan kendali baru ini menunjukkan bahwa angka kesalahan rata-rata pola tungku di bawah 1% dengan aktifitas ON-OFF motor pengendali cukup rendah. Dengan kondisi ini diharapkan dapat memperpanjang umur kerja komponen terkait dengan aktifitas ON-OFF tersebut. ABSTRACT A REFURBISHING OF TEMPERATURE CONTROL SYSTEM OF UO2 PELLET SINTERING FURNACE. A refurbishing of temperature control of a sintering furnace for UO2 pellet at P2TBDU - BATAN Serpong has been done. It is conducted because some of its control components have been obselete. Technical engineering steps such as requirement definition, design, construction, and evaluation are explained in this paper. The evaluation shows that error average using this new controller is under 1% with its ON- OFF activity to control the motor is low. Hopefully by this control system will prolong any related components actuated by this ON-OFF actifity. PENDAHULUAN ungku listrik 80 KW untuk proses sinter pelet UO 2 yang ada di ruang HR-05 P2TBDU- BATAN (Gambar 1), mengalami kerusakan pada bagian kendali suhunya. Kerusakan-kerusakan yang pernah terjadi telah berhasil diperbaiki, namun seiring dengan berjalannya waktu - berkaitan dengan umur (life-time) - kerusakan berikutnya setelah perbaikan terjadi lagi. Refurbishing untuk sistem kendali suhunya akhirnya harus dilakukan T karena beberapa komponen kendali sudah tidak diproduksi lagi oleh pabrik pembuatnya (obsolete). Kronologis perbaikan sistem kendali tungku diperlihatkan pada Gambar 2. Pada awalnya, interface sistem tungku dengan pengguna tungku menggunakan gulungan kertas, dimana pada gulu- ngan tersebut digambar pola penyinteran menggu- nakan pita kecil warna hitam. Alur pita tersebut dideteksi oleh sistem optomekanik untuk dirubah menjadi sinyal perintah dalam mengendalikan suhu dalam tungku sesuai dengan pola pita tersebut. Prosiding PPI - PDIPTN 2005 Puslitbang Teknologi Maju - BATAN Yogyakarta, 12 Juli 2005
Transcript of REFURBISHING SISTEM KENDALI SUHU TUNGKU SINTER...
Achmad Suntoro ISSN 0216 - 3128 63
REFURBISHING SISTEM KENDALI SUHU TUNGKUSINTER PELET UO2
Achmad SuntoroPusat Pengembangan Perangkat Nuklir – BATAN
ABSTRAK
REFURBISHING SISTEM KENDALI SUHU TUNGKU SINTER PELET UO2. Telah dilakukanrefurbishing sistem kendali suhu tungku sinter pelet UO2 yang ada di P2TBDU-BATAN Serpong.Refurbishing ini dilakukan karena beberapa komponen kendali suhu sistem tungku tidak diproduksi lagioleh pabrik pembuatnya. Langkah teknis engineering berupa batasan-disain, disain, konstruksi danpengujian dijelaskan dalam makalah ini. Dari data pengujian menggunakan kendali baru ini menunjukkanbahwa angka kesalahan rata-rata pola tungku di bawah 1% dengan aktifitas ON-OFF motor pengendalicukup rendah. Dengan kondisi ini diharapkan dapat memperpanjang umur kerja komponen terkait denganaktifitas ON-OFF tersebut.
ABSTRACT
A REFURBISHING OF TEMPERATURE CONTROL SYSTEM OF UO2 PELLET SINTERING FURNACE.A refurbishing of temperature control of a sintering furnace for UO2 pellet at P2TBDU - BATAN Serponghas been done. It is conducted because some of its control components have been obselete. Technicalengineering steps such as requirement definition, design, construction, and evaluation are explained inthis paper. The evaluation shows that error average using this new controller is under 1% with its ON-OFF activity to control the motor is low. Hopefully by this control system will prolong any relatedcomponents actuated by this ON-OFF actifity.
PENDAHULUAN
ungku listrik 80 KW untuk proses sinter peletUO2 yang ada di ruang HR-05 P2TBDU-
BATAN (Gambar 1), mengalami kerusakan padabagian kendali suhunya. Kerusakan-kerusakan yangpernah terjadi telah berhasil diperbaiki, namunseiring dengan berjalannya waktu - berkaitandengan umur (life-time) - kerusakan berikutnyasetelah perbaikan terjadi lagi. Refurbishing untuksistem kendali suhunya akhirnya harus dilakukan
Tkarena beberapa komponen kendali sudah tidakdiproduksi lagi oleh pabrik pembuatnya (obsolete).
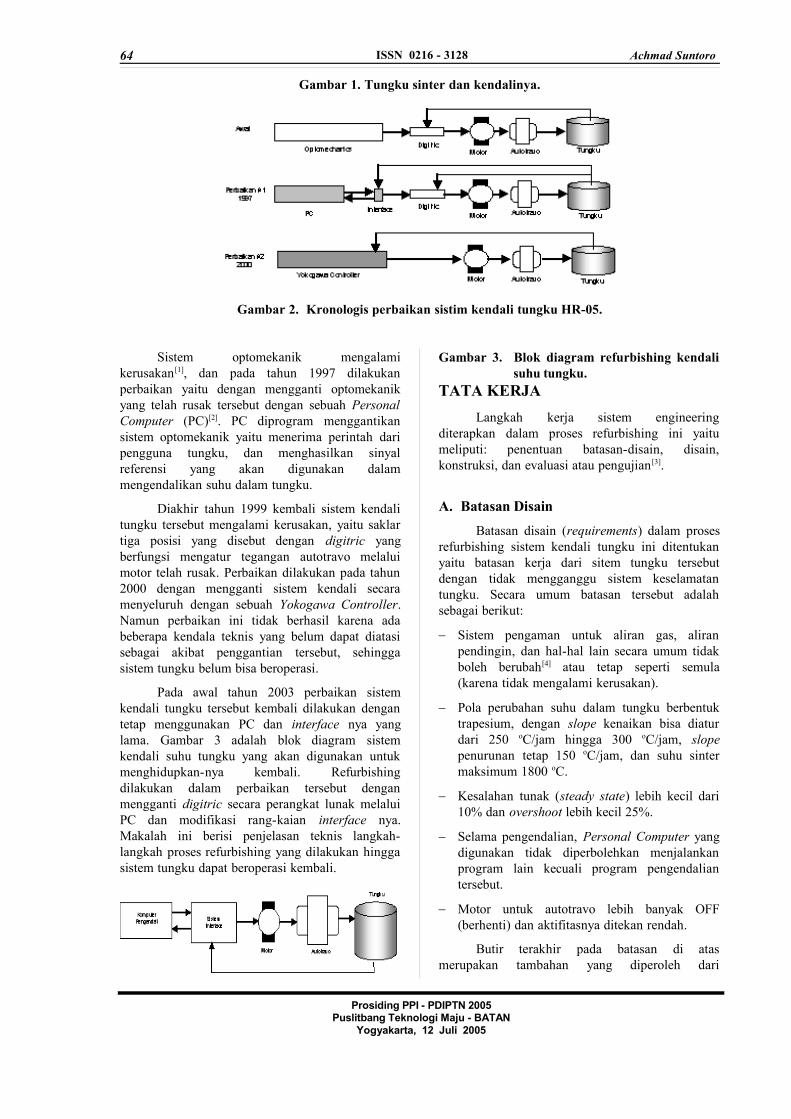
Kronologis perbaikan sistem kendali tungkudiperlihatkan pada Gambar 2. Pada awalnya,interface sistem tungku dengan pengguna tungkumenggunakan gulungan kertas, dimana pada gulu-ngan tersebut digambar pola penyinteran menggu-nakan pita kecil warna hitam. Alur pita tersebutdideteksi oleh sistem optomekanik untuk dirubahmenjadi sinyal perintah dalam mengendalikan suhudalam tungku sesuai dengan pola pita tersebut.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
64 ISSN 0216 - 3128 Achmad Suntoro
Gambar 1. Tungku sinter dan kendalinya.
Gambar 2. Kronologis perbaikan sistim kendali tungku HR-05.
Sistem optomekanik mengalamikerusakan[1], dan pada tahun 1997 dilakukanperbaikan yaitu dengan mengganti optomekanikyang telah rusak tersebut dengan sebuah PersonalComputer (PC)[2]. PC diprogram menggantikansistem optomekanik yaitu menerima perintah daripengguna tungku, dan menghasilkan sinyalreferensi yang akan digunakan dalammengendalikan suhu dalam tungku.
Diakhir tahun 1999 kembali sistem kendalitungku tersebut mengalami kerusakan, yaitu saklartiga posisi yang disebut dengan digitric yangberfungsi mengatur tegangan autotravo melaluimotor telah rusak. Perbaikan dilakukan pada tahun2000 dengan mengganti sistem kendali secaramenyeluruh dengan sebuah Yokogawa Controller.Namun perbaikan ini tidak berhasil karena adabeberapa kendala teknis yang belum dapat diatasisebagai akibat penggantian tersebut, sehinggasistem tungku belum bisa beroperasi.
Pada awal tahun 2003 perbaikan sistemkendali tungku tersebut kembali dilakukan dengantetap menggunakan PC dan interface nya yanglama. Gambar 3 adalah blok diagram sistemkendali suhu tungku yang akan digunakan untukmenghidupkan-nya kembali. Refurbishingdilakukan dalam perbaikan tersebut denganmengganti digitric secara perangkat lunak melaluiPC dan modifikasi rang-kaian interface nya.Makalah ini berisi penjelasan teknis langkah-langkah proses refurbishing yang dilakukan hinggasistem tungku dapat beroperasi kembali.
Gambar 3. Blok diagram refurbishing kendalisuhu tungku.
TATA KERJA
Langkah kerja sistem engineeringditerapkan dalam proses refurbishing ini yaitumeliputi: penentuan batasan-disain, disain,konstruksi, dan evaluasi atau pengujian [3].
A. Batasan Disain
Batasan disain (requirements) dalam prosesrefurbishing sistem kendali tungku ini ditentukanyaitu batasan kerja dari sitem tungku tersebutdengan tidak mengganggu sistem keselamatantungku. Secara umum batasan tersebut adalahsebagai berikut:
Sistem pengaman untuk aliran gas, aliranpendingin, dan hal-hal lain secara umum tidakboleh berubah[4] atau tetap seperti semula(karena tidak mengalami kerusakan).
Pola perubahan suhu dalam tungku berbentuktrapesium, dengan slope kenaikan bisa diaturdari 250 oC/jam hingga 300 oC/jam, slopepenurunan tetap 150 oC/jam, dan suhu sintermaksimum 1800 oC.
Kesalahan tunak (steady state) lebih kecil dari10% dan overshoot lebih kecil 25%.
Selama pengendalian, Personal Computer yangdigunakan tidak diperbolehkan menjalankanprogram lain kecuali program pengendaliantersebut.
Motor untuk autotravo lebih banyak OFF(berhenti) dan aktifitasnya ditekan rendah.
Butir terakhir pada batasan di atasmerupakan tambahan yang diperoleh dari
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
Achmad Suntoro ISSN 0216 - 3128 65
pengalaman selama menjalankan tungku-dalamusaha untuk mem-perpanjang umur kerjakomponen kendali yang terkait.
B. Disain Kendali Suhu
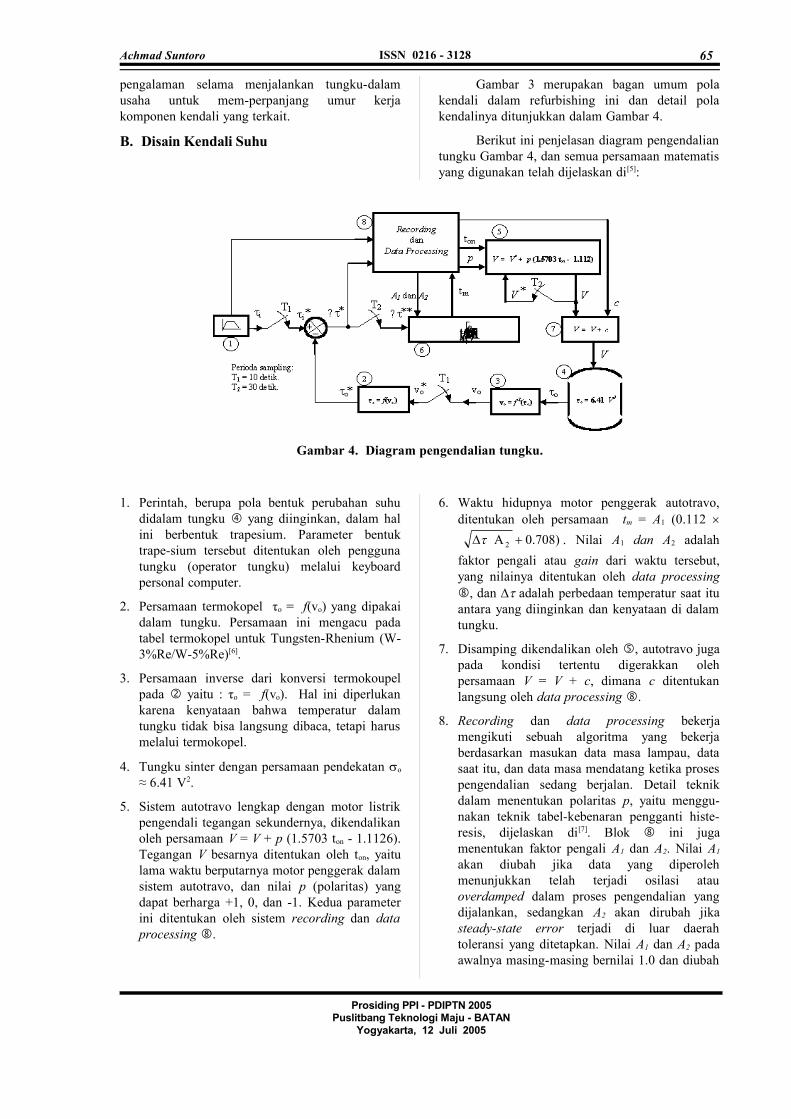
Gambar 3 merupakan bagan umum polakendali dalam refurbishing ini dan detail polakendalinya ditunjukkan dalam Gambar 4.
Berikut ini penjelasan diagram pengendaliantungku Gambar 4, dan semua persamaan matematisyang digunakan telah dijelaskan di[5]:
Gambar 4. Diagram pengendalian tungku.
1. Perintah, berupa pola bentuk perubahan suhudidalam tungku yang diinginkan, dalam halini berbentuk trapesium. Parameter bentuktrape-sium tersebut ditentukan oleh penggunatungku (operator tungku) melalui keyboardpersonal computer.
2. Persamaan termokopel τo = f(vo) yang dipakaidalam tungku. Persamaan ini mengacu padatabel termokopel untuk Tungsten-Rhenium (W-3%Re/W-5%Re)[6].
3. Persamaan inverse dari konversi termokoupelpada yaitu : τo = f(vo). Hal ini diperlukankarena kenyataan bahwa temperatur dalamtungku tidak bisa langsung dibaca, tetapi harusmelalui termokopel.
4. Tungku sinter dengan persamaan pendekatan o
≈ 6.41 V2.
5. Sistem autotravo lengkap dengan motor listrikpengendali tegangan sekundernya, dikendalikanoleh persamaan V = V + p (1.5703 ton - 1.1126).Tegangan V besarnya ditentukan oleh ton, yaitulama waktu berputarnya motor penggerak dalamsistem autotravo, dan nilai p (polaritas) yangdapat berharga +1, 0, dan -1. Kedua parameterini ditentukan oleh sistem recording dan dataprocessing .
6. Waktu hidupnya motor penggerak autotravo,ditentukan oleh persamaan tm = A1 (0.112
0.708) A 2 . Nilai A1 dan A2 adalah
faktor pengali atau gain dari waktu tersebut,yang nilainya ditentukan oleh data processing, dan adalah perbedaan temperatur saat ituantara yang diinginkan dan kenyataan di dalamtungku.
7. Disamping dikendalikan oleh , autotravo jugapada kondisi tertentu digerakkan olehpersamaan V = V + c, dimana c ditentukanlangsung oleh data processing .
8. Recording dan data processing bekerjamengikuti sebuah algoritma yang bekerjaberdasarkan masukan data masa lampau, datasaat itu, dan data masa mendatang ketika prosespengendalian sedang berjalan. Detail teknikdalam menentukan polaritas p, yaitu menggu-nakan teknik tabel-kebenaran pengganti histe-resis, dijelaskan di[7]. Blok ini jugamenentukan faktor pengali A1 dan A2. Nilai A1
akan diubah jika data yang diperolehmenunjukkan telah terjadi osilasi atauoverdamped dalam proses pengendalian yangdijalankan, sedangkan A2 akan dirubah jikasteady-state error terjadi di luar daerahtoleransi yang ditetapkan. Nilai A1 dan A2 padaawalnya masing-masing bernilai 1.0 dan diubah
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
66 ISSN 0216 - 3128 Achmad Suntoro
masing-masing naik atau turun tergantungsituasi pengendalian saat itu. Bersamaandengan perubahan nilai A2 maka nilai c padablok diaktifkan sejenak (c 0 dan kembali c= 0) untuk memaksa naik atau turun tegangansekunder autotravo, agar error saat itumengecil. Perubahan nilai A2 terjadi karenagain pengendalian yang dipilih kurang tepat,sehingga perlu diubah ke arah yang lebih tepatdengan mengubah nilai A2. Waktu penyalaanmotor ton juga ditentukan oleh blok ini.Waktu ini berasal dari tm yang dihasilkan olehpersamaan pada blok . Nilai tm ini dievaluasisebagai berikut. Jika tm < 750 ms maka ton = 0atau motor tetap mati, dan jika tm 750 msmaka ton = tm, atau motor aktif selama ton. Angka750 ms berasal dari persamaan pada blok ,dimana nilai ton akan punya arti jika ton 708ms. Tujuan utama algoritma ini secaramenyeluruh adalah untuk mengatur agarfrekuensi aktifitas motor rendah dan motor lebihbanyak mati (tidak aktif) selama pengendalian,namun tetap menekan rendah kesalahan –sesuai dengan tuntutan batasan disain butirterakhir.
C. Konstruksi Refurbishing
Perangkat keras dan lunak perlu dibuatuntuk implementasi disain Gambar 3 dan 4.Perangkat keras meliputi pembuatan sisteminterface dan perangkat lunak adalah pembuatanprogram komputer untuk menggerakkan komponenkendali melalui sistem interface tersebut.
1. Modul Interface
Modul interface akan menghubungkanperintah-perintah yang berasal dari perangkat lunakuntuk dihubungkan pada komponen-komponenkendali sehingga temperatur dalam tungku berubahsesuai dengan perintah tersebut. Bentuk fisik modulinterface yang dibuat adalah sebagai berikut.
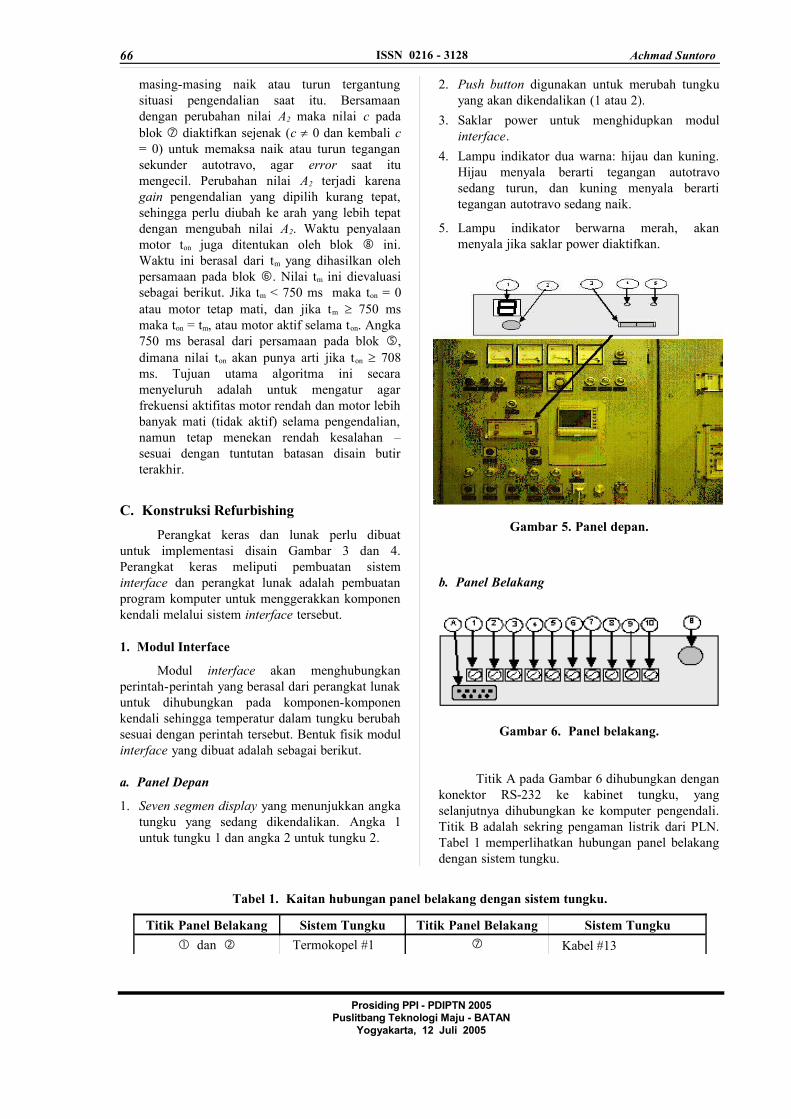
a. Panel Depan
1. Seven segmen display yang menunjukkan angkatungku yang sedang dikendalikan. Angka 1untuk tungku 1 dan angka 2 untuk tungku 2.
2. Push button digunakan untuk merubah tungkuyang akan dikendalikan (1 atau 2).
3. Saklar power untuk menghidupkan modulinterface.
4. Lampu indikator dua warna: hijau dan kuning.Hijau menyala berarti tegangan autotravosedang turun, dan kuning menyala berartitegangan autotravo sedang naik.
5. Lampu indikator berwarna merah, akanmenyala jika saklar power diaktifkan.
Gambar 5. Panel depan.
b. Panel Belakang
Gambar 6. Panel belakang.
Titik A pada Gambar 6 dihubungkan dengankonektor RS-232 ke kabinet tungku, yangselanjutnya dihubungkan ke komputer pengendali.Titik B adalah sekring pengaman listrik dari PLN.Tabel 1 memperlihatkan hubungan panel belakangdengan sistem tungku.
Tabel 1. Kaitan hubungan panel belakang dengan sistem tungku.
Titik Panel Belakang Sistem Tungku Titik Panel Belakang Sistem Tungku
dan Termokopel #1 Kabel 13
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005

Achmad Suntoro ISSN 0216 - 3128 67
dan Termokopel #2 dan Sumber listrik AC 220V dan kipas pendingin
Kabel 15 Tidak dipakai
Kabel 16
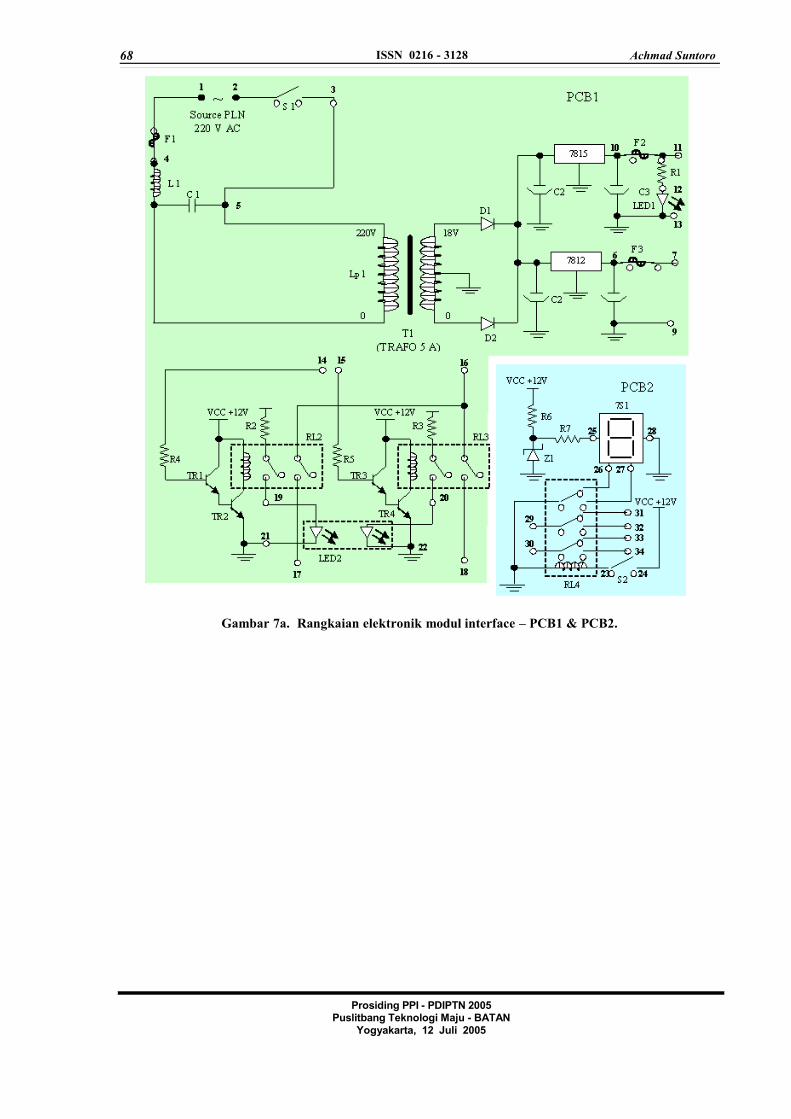
N.B: Kabel 13, 15, dan 16 berkaitan dengan pengendalian polaritas motor penggerak autotravo.2. Rangkaian Elektronik Modul Interface
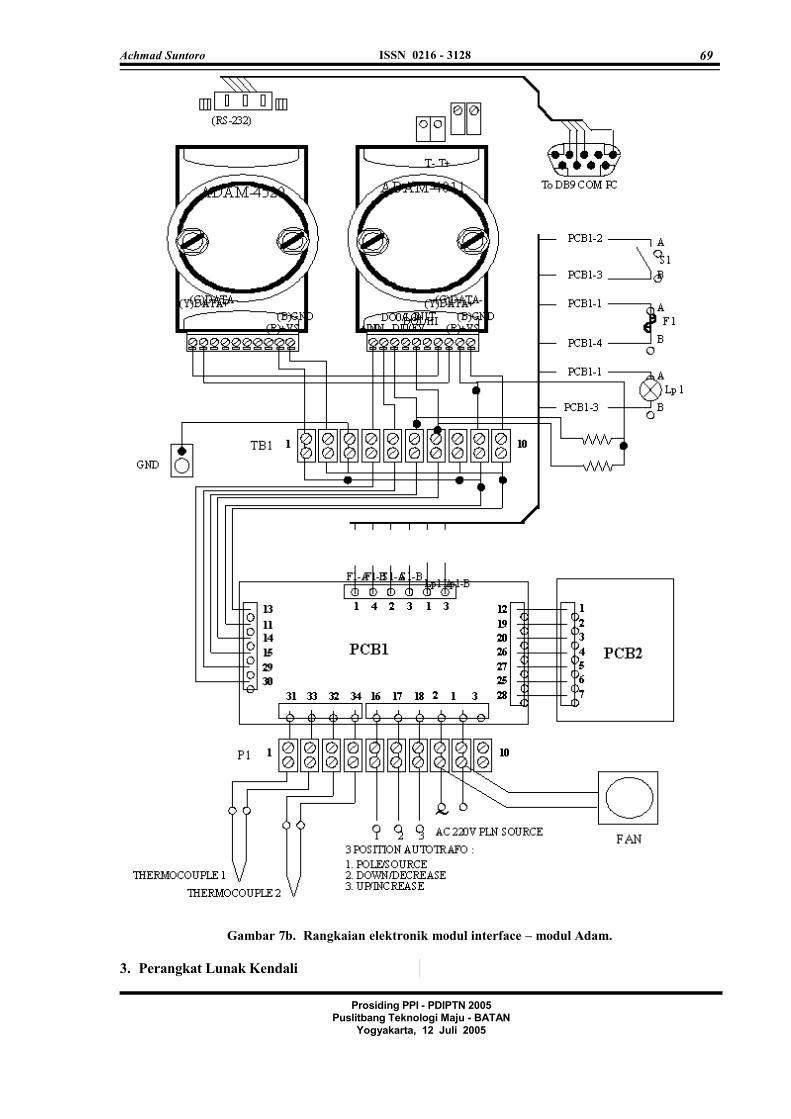
Rangkaian elektronik modul interfacepengendali terbagi menjadi dua bagian. Gambar 7aadalah bagian pertama yang berisi indikator dancatu-daya interface, dan Gambar 7b adalah modulAdvantech ADAM yang digunakan sebagaijembatan komunikasi antara Personal Computerdengan komponen elektronik yang langsungberhubungan dengan komponen lain diluar PC.
Titik 16 pada PCB1 Gambar 7b dihubung-
kan dengan tegangan kerja motor penggerakautotravo, sehingga titik 17 dan 18 merupakanpengendali arah putaran motor tersebut. Logik darikedua titik ini menentukan arah putaran dari motorsesuai dengan aturan posisi pada Tabel 2.
Waktu atau lamanya kedua titik tersebutpada suatu posisi logik akan menentukanaktifitas motor pengendali tegangan sekunderautotravo, dan waktu ton ini ditentukan olehalgoritma blok pada Gambar 4.
Tabel 2. Logik gerakan motor.
Logik Kondisi Motor Tegangan Autotravo
Posisi-1 00 Mati Tetap
Posisi-2 10 Berputar arah jarum jam Naik
Posisi-3 01 Berputar arah lawan jarum jam Turun
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
68 ISSN 0216 - 3128 Achmad Suntoro
Gambar 7a. Rangkaian elektronik modul interface – PCB1 & PCB2.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
Achmad Suntoro ISSN 0216 - 3128 69
Gambar 7b. Rangkaian elektronik modul interface – modul Adam.
3. Perangkat Lunak Kendali
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
70 ISSN 0216 - 3128 Achmad Suntoro
Bahasa pemrograman C dengan compilerBorland C++ versi 3.1 digunakan untuk mengge-rakkan pengendalian diatas. Operating sistem DOStetap dipertahankan, tidak memakai Windows,mengingat multitasking tidak diperbolehkan selamatungku beroperasi.
HASIL DAN PEMBAHASAN
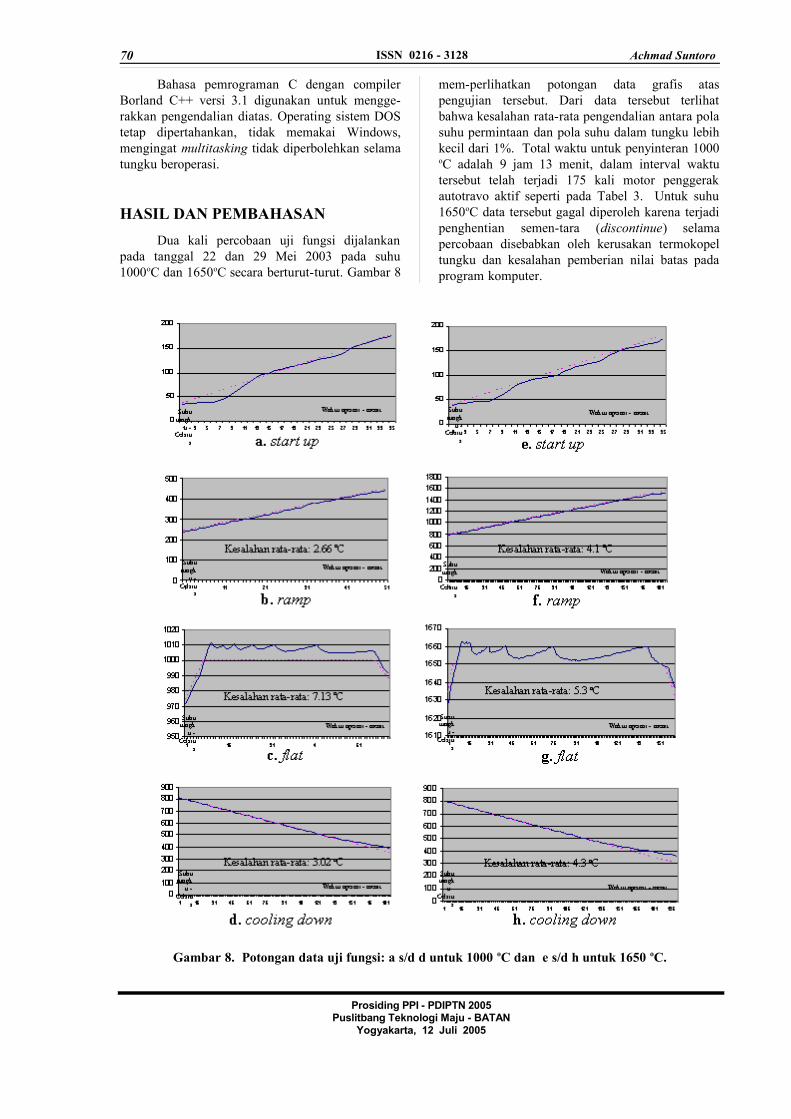
Dua kali percobaan uji fungsi dijalankanpada tanggal 22 dan 29 Mei 2003 pada suhu1000oC dan 1650oC secara berturut-turut. Gambar 8
mem-perlihatkan potongan data grafis ataspengujian tersebut. Dari data tersebut terlihatbahwa kesalahan rata-rata pengendalian antara polasuhu permintaan dan pola suhu dalam tungku lebihkecil dari 1%. Total waktu untuk penyinteran 1000oC adalah 9 jam 13 menit, dalam interval waktutersebut telah terjadi 175 kali motor penggerakautotravo aktif seperti pada Tabel 3. Untuk suhu1650oC data tersebut gagal diperoleh karena terjadipenghentian semen-tara (discontinue) selamapercobaan disebabkan oleh kerusakan termokopeltungku dan kesalahan pemberian nilai batas padaprogram komputer.
Gambar 8. Potongan data uji fungsi: a s/d d untuk 1000 oC dan e s/d h untuk 1650 oC.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
Achmad Suntoro ISSN 0216 - 3128 71
Tabel 3. Aktifitas motor penggerak auto-travo untuk pengujian suhu1000oC.
Asal Sinyal Penggerak Jumlah AktifitasMotor
Blok konstan 250 ms 32 kali
Blok 143 kali
Total 175 kali
Lama (duration) aktifitas motor oleh Blok ditentukan konstan sebesar 250 ms, sedangkan olehBlok ditentukan oleh rumus pada Blok untukkondisi ramp dan flat. Pada kondisi cooling-downlama aktifitas motor dibuat konstan 500 ms, dandiperoleh data sebagai berikut Tabel 4.
Tabel 4. Komposisi (rincian) asal sinyaldari Blok .
Asal SinyalPenggerak Dari Blok
Jumlah AktifitasMotor
Rumus pada Blok 152 kali
Konstan 500 ms. 91 kali
Total 143 kali
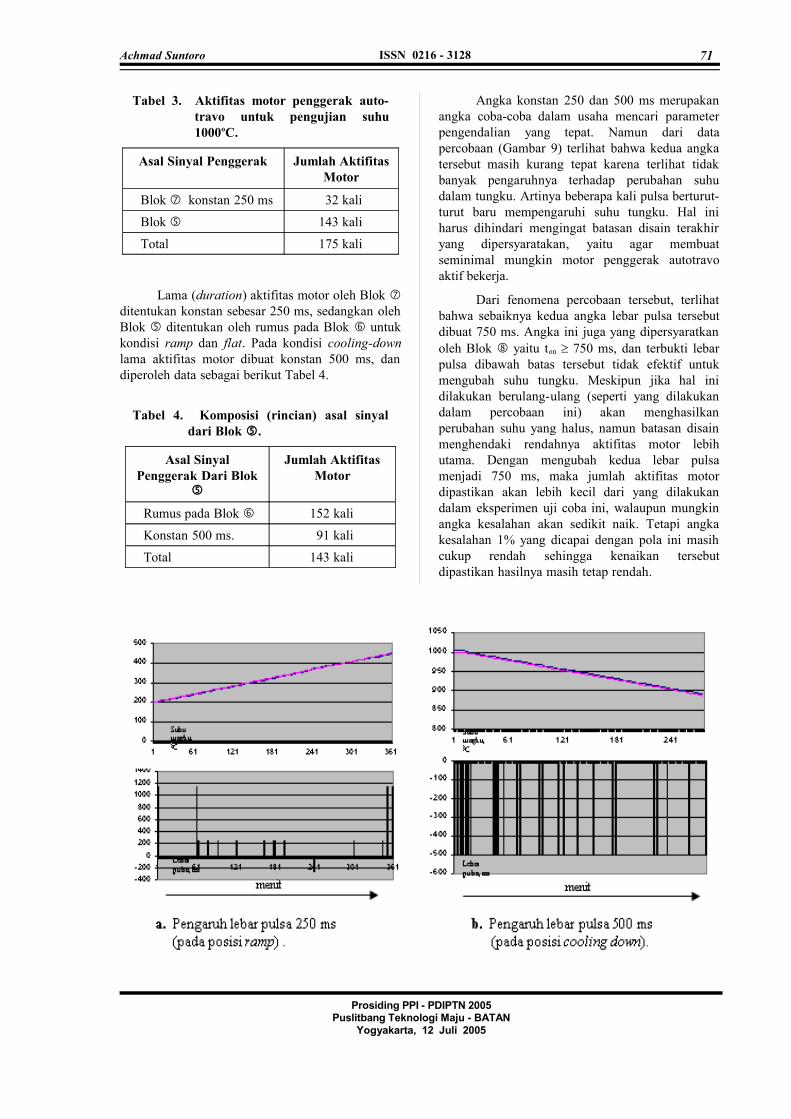
Angka konstan 250 dan 500 ms merupakanangka coba-coba dalam usaha mencari parameterpengendalian yang tepat. Namun dari datapercobaan (Gambar 9) terlihat bahwa kedua angkatersebut masih kurang tepat karena terlihat tidakbanyak pengaruhnya terhadap perubahan suhudalam tungku. Artinya beberapa kali pulsa berturut-turut baru mempengaruhi suhu tungku. Hal iniharus dihindari mengingat batasan disain terakhiryang dipersyaratakan, yaitu agar membuatseminimal mungkin motor penggerak autotravoaktif bekerja.
Dari fenomena percobaan tersebut, terlihatbahwa sebaiknya kedua angka lebar pulsa tersebutdibuat 750 ms. Angka ini juga yang dipersyaratkanoleh Blok yaitu ton 750 ms, dan terbukti lebarpulsa dibawah batas tersebut tidak efektif untukmengubah suhu tungku. Meskipun jika hal inidilakukan berulang-ulang (seperti yang dilakukandalam percobaan ini) akan menghasilkanperubahan suhu yang halus, namun batasan disainmenghendaki rendahnya aktifitas motor lebihutama. Dengan mengubah kedua lebar pulsamenjadi 750 ms, maka jumlah aktifitas motordipastikan akan lebih kecil dari yang dilakukandalam eksperimen uji coba ini, walaupun mungkinangka kesalahan akan sedikit naik. Tetapi angkakesalahan 1% yang dicapai dengan pola ini masihcukup rendah sehingga kenaikan tersebutdipastikan hasilnya masih tetap rendah.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
72 ISSN 0216 - 3128 Achmad Suntoro
Gambar 9. Pengaruh lebar pulsa kendali pada suhu tungku.
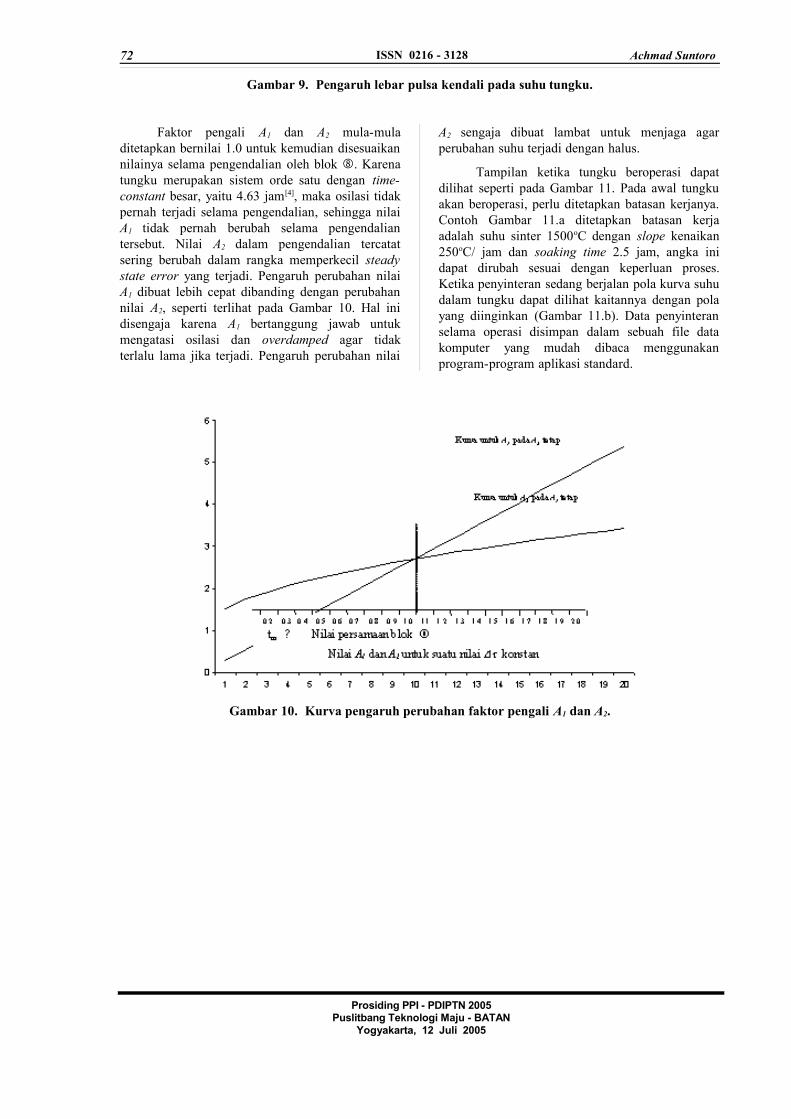
Faktor pengali A1 dan A2 mula-muladitetapkan bernilai 1.0 untuk kemudian disesuaikannilainya selama pengendalian oleh blok . Karenatungku merupakan sistem orde satu dengan time-constant besar, yaitu 4.63 jam[4], maka osilasi tidakpernah terjadi selama pengendalian, sehingga nilaiA1 tidak pernah berubah selama pengendaliantersebut. Nilai A2 dalam pengendalian tercatatsering berubah dalam rangka memperkecil steadystate error yang terjadi. Pengaruh perubahan nilaiA1 dibuat lebih cepat dibanding dengan perubahannilai A2, seperti terlihat pada Gambar 10. Hal inidisengaja karena A1 bertanggung jawab untukmengatasi osilasi dan overdamped agar tidakterlalu lama jika terjadi. Pengaruh perubahan nilai
A2 sengaja dibuat lambat untuk menjaga agarperubahan suhu terjadi dengan halus.
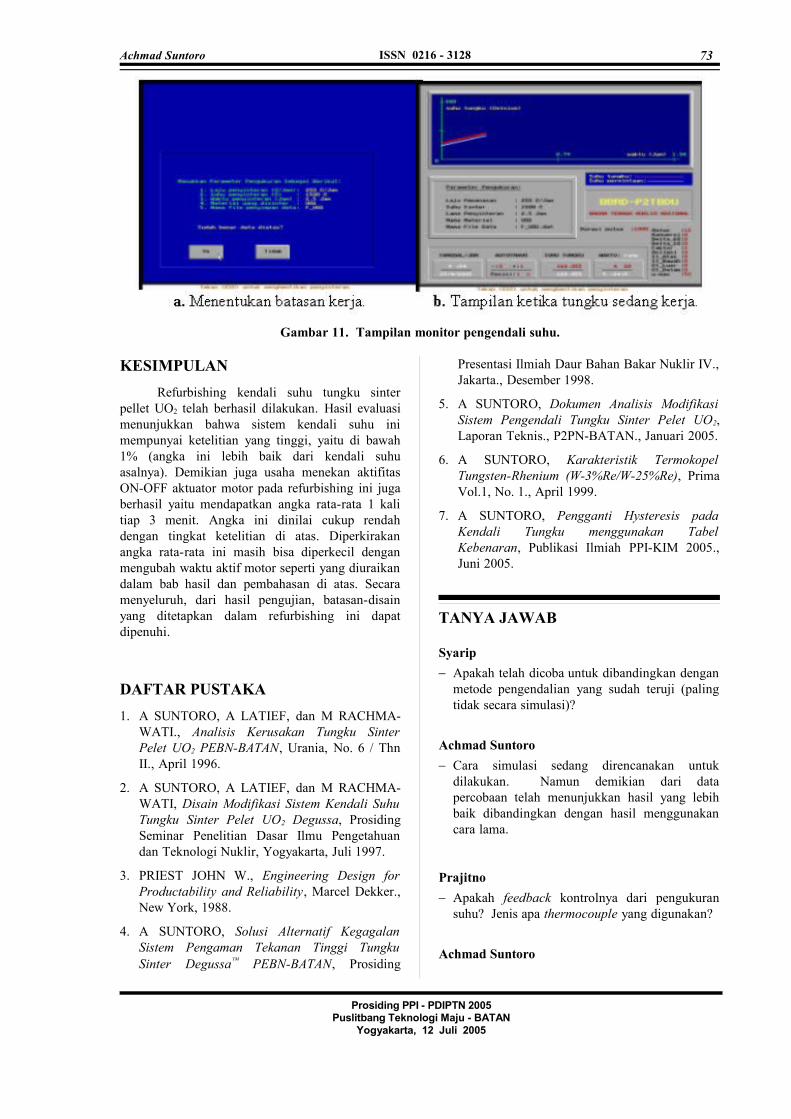
Tampilan ketika tungku beroperasi dapatdilihat seperti pada Gambar 11. Pada awal tungkuakan beroperasi, perlu ditetapkan batasan kerjanya.Contoh Gambar 11.a ditetapkan batasan kerjaadalah suhu sinter 1500oC dengan slope kenaikan250oC/ jam dan soaking time 2.5 jam, angka inidapat dirubah sesuai dengan keperluan proses.Ketika penyinteran sedang berjalan pola kurva suhudalam tungku dapat dilihat kaitannya dengan polayang diinginkan (Gambar 11.b). Data penyinteranselama operasi disimpan dalam sebuah file datakomputer yang mudah dibaca menggunakanprogram-program aplikasi standard.
Gambar 10. Kurva pengaruh perubahan faktor pengali A1 dan A2.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005
Achmad Suntoro ISSN 0216 - 3128 73
Gambar 11. Tampilan monitor pengendali suhu.
KESIMPULAN
Refurbishing kendali suhu tungku sinterpellet UO2 telah berhasil dilakukan. Hasil evaluasimenunjukkan bahwa sistem kendali suhu inimempunyai ketelitian yang tinggi, yaitu di bawah1% (angka ini lebih baik dari kendali suhuasalnya). Demikian juga usaha menekan aktifitasON-OFF aktuator motor pada refurbishing ini jugaberhasil yaitu mendapatkan angka rata-rata 1 kalitiap 3 menit. Angka ini dinilai cukup rendahdengan tingkat ketelitian di atas. Diperkirakanangka rata-rata ini masih bisa diperkecil denganmengubah waktu aktif motor seperti yang diuraikandalam bab hasil dan pembahasan di atas. Secaramenyeluruh, dari hasil pengujian, batasan-disainyang ditetapkan dalam refurbishing ini dapatdipenuhi.
DAFTAR PUSTAKA
1. A SUNTORO, A LATIEF, dan M RACHMA-WATI., Analisis Kerusakan Tungku SinterPelet UO2 PEBN-BATAN, Urania, No. 6 / ThnII., April 1996.
2. A SUNTORO, A LATIEF, dan M RACHMA-WATI, Disain Modifikasi Sistem Kendali SuhuTungku Sinter Pelet UO2 Degussa, ProsidingSeminar Penelitian Dasar Ilmu Pengetahuandan Teknologi Nuklir, Yogyakarta, Juli 1997.
3. PRIEST JOHN W., Engineering Design forProductability and Reliability, Marcel Dekker.,New York, 1988.
4. A SUNTORO, Solusi Alternatif KegagalanSistem Pengaman Tekanan Tinggi TungkuSinter Degussa PEBN-BATAN, Prosiding
Presentasi Ilmiah Daur Bahan Bakar Nuklir IV.,Jakarta., Desember 1998.
5. A SUNTORO, Dokumen Analisis ModifikasiSistem Pengendali Tungku Sinter Pelet UO2,Laporan Teknis., P2PN-BATAN., Januari 2005.
6. A SUNTORO, Karakteristik TermokopelTungsten-Rhenium (W-3%Re/W-25%Re), PrimaVol.1, No. 1., April 1999.
7. A SUNTORO, Pengganti Hysteresis padaKendali Tungku menggunakan TabelKebenaran, Publikasi Ilmiah PPI-KIM 2005.,Juni 2005.
TANYA JAWAB
Syarip
Apakah telah dicoba untuk dibandingkan denganmetode pengendalian yang sudah teruji (palingtidak secara simulasi)?
Achmad Suntoro
Cara simulasi sedang direncanakan untukdilakukan. Namun demikian dari datapercobaan telah menunjukkan hasil yang lebihbaik dibandingkan dengan hasil menggunakancara lama.
Prajitno
Apakah feedback kontrolnya dari pengukuransuhu? Jenis apa thermocouple yang digunakan?
Achmad Suntoro
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005

74 ISSN 0216 - 3128 Achmad Suntoro
Feed back control suhu menggunakan thermo-couple tidak standard (bukan standard ANSI)yaitu jenis W-3% Re / W-5% Re. Dari tabelkonversi voltage to temperature thermocouplebersangkutan proses pengendalian mendapatdata temperature tungku.
Dewita
Bagaimana dengan laju pemanasan, apakah tabelBapak berlaku untuk laju pemanasan tinggimaupun rendah.
Keandalan 110% apa bukan disebabkankesalahan pengukuran (alat ukur suhunya sudah
tidak baik) bagaimana Bapak mengetahuinilainya.
Achmad Suntoro
Laju pemanasan bisa diubah-ubah dari rendahhingga maskimum 300 oC/jam. Dari simulasisederhana tabel yang digunakan dalam kendalimasih berlaku.
Nilai pengukuran bersandar pada thermocoupledan tabel konversinya. Angka kesalahandidapat dari perbedaan angka suhu yangdiinginkan dengan yang diperoleh darithermocouple tersebut lewat tabelnya.
Prosiding PPI - PDIPTN 2005Puslitbang Teknologi Maju - BATAN
Yogyakarta, 12 Juli 2005