Redes Neuronales para la Detecci´on y … · tecturas Perceptron Multicapa y Kohonen utilizando...
9
Redes Neuronales para la Detecci´on y Caracterizaci´on de Defectos en Ensayo Termogr´ afico No Destructivo H.Benitez,J.Lopez,H.Loaiza, E.Caicedo Universidad del Valle, Grupo Percepci´on y Sistemas Inteligentes, Cali, Colombia {hbenitez,jesuslop,hloaiza, ecaicedo}@univalle.edu.co http://www.univalle.edu.co/ infoindustrial/investigacion/index.htm Abstract. The possible applications of Themographic Nondestructive Testing (TNDT) have been limited due to nonlinear nature of inverse problems such as the calculation of defect’s depths in a material. The Neural Networks have been applied to extract quantitative information in TNDT where the presence of noise and the inverse nature of the characterization problem makes difficult the precise estimation of defect’s parameters. In this paper, it is shown the design and application of a Neural Network system to detect and quantify defects in Plastic Fiber Glass by using TNDT. C:/img1.eps Fig. 1. cccc 1 Introducci´on Durante varios a˜ nos, las mediciones infrarojas y las t´ ecnicas de inspecci´on han sido empleadas para evaluar defectos que se encuentran bajo la superficie de la muestra de un material. Bas´andose en el estudio de la propagaci´on de las ondas t´ ermicas y de su atenuaci´ on se puede determinar como un defecto o inhomogenei- dad altera la propagaci´ on del calor y cambia la distribuci´ on de temperatura en la superficie de la muestra del material. La perturbaci´ on t´ ermica es grabada por una c´ amara infrarojo con el fin analizarla en una etapa de posprocesamiento [1]. La termograf´ ıa permite una inspecci´ on r´ apida y no invasiva de superficies y materiales mejorando la interpretaci´on de resultados obtenidos a partir de la inspecci´ on [8]. Aunque por otro lado, la presencia de ruido y una resoluci´on limitada se encuentran entre las desventajas de esta t´ ecnica. En la termograf´ ıa activa, la muestra inspeccionada se calienta por un periodo de tiempo de ms ´o
Transcript of Redes Neuronales para la Detecci´on y … · tecturas Perceptron Multicapa y Kohonen utilizando...

Redes Neuronales
para la Deteccion y Caracterizacion de Defectos
en Ensayo Termografico No Destructivo
H.Benitez,J.Lopez,H.Loaiza, E.Caicedo
Universidad del Valle, Grupo Percepcion y Sistemas Inteligentes, Cali,Colombia
{hbenitez,jesuslop,hloaiza, ecaicedo}@univalle.edu.cohttp://www.univalle.edu.co/ infoindustrial/investigacion/index.htm
Abstract. The possible applications of Themographic NondestructiveTesting (TNDT) have been limited due to nonlinear nature of inverseproblems such as the calculation of defect’s depths in a material. TheNeural Networks have been applied to extract quantitative informationin TNDT where the presence of noise and the inverse nature of thecharacterization problem makes difficult the precise estimation of defect’sparameters. In this paper, it is shown the design and application of aNeural Network system to detect and quantify defects in Plastic FiberGlass by using TNDT.
C:/img1.eps
Fig. 1. cccc
1 Introduccion
Durante varios anos, las mediciones infrarojas y las tecnicas de inspeccion hansido empleadas para evaluar defectos que se encuentran bajo la superficie de lamuestra de un material. Basandose en el estudio de la propagacion de las ondastermicas y de su atenuacion se puede determinar como un defecto o inhomogenei-dad altera la propagacion del calor y cambia la distribucion de temperatura enla superficie de la muestra del material. La perturbacion termica es grabada poruna camara infrarojo con el fin analizarla en una etapa de posprocesamiento[1]. La termografıa permite una inspeccion rapida y no invasiva de superficiesy materiales mejorando la interpretacion de resultados obtenidos a partir de lainspeccion [8]. Aunque por otro lado, la presencia de ruido y una resolucionlimitada se encuentran entre las desventajas de esta tecnica. En la termografıaactiva, la muestra inspeccionada se calienta por un periodo de tiempo de ms o
2
s dependiendo del espesor y de las propiedades termofısicas del material eval-uado. Usualmente el analisis de la evolucion de la temperatura se hace en eldominio del tiempo, aunque tambien se efectua en el dominio de la frecuenciamediante la tecnica Pulsed Phase Thermography (PPT)[9]. La parametrizacionde defectos en ETND es un problema que aun se encuentra en la agenda deinvestigacion de la comunidad cientıfica de ETND [7]. Esto es debido a que esmuy importante conocer con precision la severidad de un dano y ademas es unproblema inverso,no lineal y con presencia de ruido en varias manifestaciones:optico,electronico,estructural y ambiental.Las Redes Neuronales Artificiales han sido empleadas en los ultimos anos comodetectores, clasificadores y estimadores de parametros de defectos en el EnsayoTermico No Destructivo ETND [1-6]. En estos estudios se han empleado arqui-tecturas Perceptron Multicapa y Kohonen utilizando como entradas para estasredes curvas de evolucion del contraste termico respecto al tiempo o el valormaximo del contraste termico junto con el instante de tiempo en que este valormaximo se da para cada pixel.Este artıculo estudia el diseno y aplicacion de una Red Neuronal en la detecciony caracterizacion de defectos en un material isotropico como el plastico de fibrade vidrio. Se utilizan datos simulados tanto para la fase de entrenamiento comopara la fase de validacion.
1.1 Especificacion del material Inspeccionar
El material a inspeccionar es el plastico de fibra de vidrio. La muestra tieneun espesor L3 de 2 mm y un ancho y largo de L1 =100 mm y L2 = 100 mmrespectivamente. Se simulan 5 defectos de aire al interior de esta muestra. Existen2 clases de defectos cuyas dimensiones son 8mm x 8mm x 0.2mm (A,B,D) y 16mmx 16mm x 0.2mm (C,E). La distribucion de los defectos sobre la muestra se ilustraen la Figura 1. En la Tabla 1 se describen las propiedades termofısicas del
Caraterısticas Termofısicas Plastico de Fibra de Vidrio Aire
Conductividad (k) 0.3 W/(m.K) 0.07 W/(m.K)
Difusividad (α) 1.3 m2/s 10−7 m2/s 58 m2/s
Densidad(ρ) 1400 k/m3 1.2 k/m3
Calor Especıfico (C ) 1648 J/(kg.K) 1005 J/(kg.K)
Table 1. Propiedades termofısicas del plastico de fibra de vidrio y del aire
material y de los defectos simulados en la muestra del material. Los coeficientesde transferencia de calor para ambas caras de la muestra se definen como hc =10 W/(m2.K).

3
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Con
tras
teR
elat
ivo
Tiempo (s)
A
B
C
D
E
Pixel no defectuoso
(a) (b)
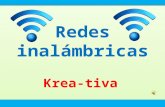
Fig. 2. (a)Distribucion de los defectos sobre la muestra (b) Contraste Termico Relativosobre los defectos A,B,C,D,E y un area no defectuosa de la muestra de Plastico de Fibrade Vidrio.Las profundidades de los defectos son : 1.5 mm ,1.2 mm,0.9 mm,0.6 mm ,0.3mm,respectivamente
2 Datos Termicos
En esta etapa se generan los datos termicos necesarios para el proceso de en-trenamiento y validadcion de las redes neuronales. Para este proposito se deberesolver la ecuacion de difusion de calor [10]:
∇2T =
1∂T
α∂t(1)
mediante metodos numericos. En este proceso se usa la herramienta Thermo-Calc 3DTM PRO de la companıa Innovation Inc. Se considera una muestra conlas dimensiones descritas en la seccion 1 y con 5 defectos (A,B,C,D,E) con pro-fundidades : 1.5 mm ,1.2 mm,0.9 mm,0.6 mm ,0.3 mm,respectivamente. Para lageneracion de los datos se hizo una simulacion en donde se calentaba la muestracon un pulso de calor con una duracion de 10 s y una magnitud de 1500 W
m2 . Apartir de estas condiciones se registraron 100 imagenes. Como entradas de la redse utiliza el valor absoluto del contraste termico relativo el cual se define como[7]:
Cr(t) =
Tdef (t) − Tno−def (t)
Tno−def (t)(2)
Se usa esta definicion de contraste termico ya que este tipo de contraste nose ve muy afectado por la propiedades opticas de la superficie del material in-speccionado y no depende fuertemente de la energıa absorbida[7]. Analizando laFigura 2 se observa que aquellos defectos que tienen una mayor profundidad yson de menor tamano (A,B,D) ofrecen un contraste termico menor que aquellosque tienen una menor profundidad y un mayor tamano (D,E).Por otro lado,lasareas no defectuosas tienen un contraste termico igual a cero. Por lo tanto losdefectos que estan a mayor profundidad tienen un contraste termico similar al de

4
areas no defectuosas en consecuencia estos defectos son mas difıciles de detectary clasificar correctamente.
3 Etapa de Entrenamiento y Diseno de la Red
Se considera la creacion de un sistema de redes neuronales que detecta los de-fectos y estima la profundidad a la cual estos se encuentran. Las entradas a estesistema son la evolucion en el tiempo del contraste termico relativo de cada pixelque conforma la secuencia de imagenes. Para la etapa de entrenamiento se utilizael contraste termico del pixel que se encuentra en la parte central de cada defectoya que este ofrece el contraste termico relativo de mayor magnitud si se comparacon los otros pixeles que conforman el resto del defecto. Ademas en esta etapa seusan veinte muestras de material con defectos cuyas profundidades varıan entre1.7 mm y 0.3 mm y cuya distribucion sobre la muestra del material se ilustraen la Figura 1. En la Tabla 2 se describen las muestras de Plastico de Fibra deVidrio empleadas para entrenar la red. En este trabajo solo se hace uso de las
Profundidades (mm) Muestras
Defectos 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
A 1.5 0.3 0.6 0.9 1.2 0.3 1.7 0.5 0.8 1.1 1.3 0.1 0.4 0.7 1.0 1.8 0.3 0.6 1.2 1.6B 1.2 1.5 0.3 0.6 0.9 0.6 1.4 1.7 0.5 0.8 1.0 1.3 0.1 0.4 0.7 1.6 1.8 0.3 0.6 1.2C 0.9 1.2 1.5 0.3 0.6 0.9 1.1 1.4 1.7 0.5 0.7 1.0 1.3 0.1 0.4 1.2 1.6 1.8 0.3 0.6D 0.6 0.9 1.2 1.5 0.3 1.2 0.8 1.1 1.4 1.7 0.4 1.7 1.0 1.3 0.1 0.6 1.2 1.6 1.8 0.3E 0.3 0.6 0.9 1.2 1.5 1.5 0.5 0.8 1.1 1.4 0.1 0.4 0.7 1.0 1.3 0.3 0.6 1.2 1.6 1.8
Table 2. Lista de muestras utilizadas para el entrenamiento de la red
redes multicapa (MLP) y se emplea el algoritmo de retrepropagacion elastica(Resilient Backpropagation Algorithm) como algoritmo de entrenamiento. Parael entrenamiento de la red se usan 120 patrones de los cuales 100 correspondena pıxeles defectuosos y 20 corresponden a pıxeles no defectuosos. Se tiene unaneurona en la capa de salida la cual entrega un valor de cero cuando el pixel esdetectado como no defectuoso por la red o entrega la profundidad estimada deldefecto cuando el pixel es detectado como defectuoso por la red. Se probaronvarias arquitecturas y la que mejor resultados entrego fue: 50-100-1.Las entradasde esta red corresponden a los 100 s del experimento con una imagen tomadacada 2 segundos. El numero de epocas con las cuales se entreno la red fue 20.000y el mnimo gradiente fue de 1e-6.
4 Etapa de Validacion
La red seleccionada en la etapa de entrenamiento se valida ahora con 5 muestrasque tienen defectos a distintas profundidades.Estos se encuentran descritos en la

5
Tabla 3. Los defectos en estas muestras tienen profundidades distintas a las quefueron empleadas para la etapa de entrenamiento con el fin de observar la ca-pacidad de generalizacion de la red. La Tabla 4 resume los resultados mostrandoel factor PCC(Porcentaje de Caracterizacion Correcta)[2]. Este porcentaje secalcula tomando la cantidad de todos los pixeles correctamente caracterizadosy dividienlos entre el numero de pıxeles en la region de interes. El primer valorentrega el PCC sobre toda la imagen, el segundo y tercer valor entregan el PCCpara las regiones defectuosas y las regiones no defectuosas,respectivamente.
Muestra Profundidades (mm)
A B C D E1 0.1 0.4 0.7 1 1.32 1.6 1.3 1.0 0.7 0.43 1.3 0.9 0.5 0.1 1.64 1.4 1.1 0.2 0.7 0.55 1.6 1.7 1.0 1.8 0.8
Table 3. Lista de muestras utilizadas para la validacion de la red
Muestra Porcentaje de Caracterizacion Correcta PCC
1 96.5 : 85.4 : 92.92 94.6 : 65.5 : 93.03 96.7 : 89.9 : 92.64 95.5 : 72.0 : 92.85 94.5 : 72.0 : 93.0
Table 4. Porcentajes de Clasificacion Correcta para las muestras de Validacion
4.1 Analisis de Resultados
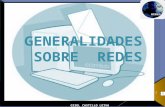
Analizando los resultados de la estimacion de la red se observa que el sistemapropuesto esta en capacidad de generalizar sobre profundidades que no habıansido presentadas en su etapa de entrenamiento. En la Figura 2 se muestra losresultados de estimacion de la red donde las zonas defectuosas fueron detec-tadas y la profundidad de los defectos estimada para la muestra de validacion 1.Para este caso la profundidad de los defectos B y C fue sobrestimada en aprox-imadamente 1.4 mm y 1.6 mm, respectivamente.Los PCC global, para areasdefectuosas y para areas no defectuosas fueron de 96.52,85.41,92.9 %, respecti-vamente. Analizando la figura 2b, donde se muestra la imagen de error absolutoentre el valor real y el valor estimado de la profundidad, se observa que el error
6
0
50
100
0 20 40 60 80 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Ancho(mm)
Alto(mm)
Pro
fund
idad
(mm
)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
A
B
C
D
E
0 20 40 60 80 1000
20
40
60
80
100
0.5
1
1.5
Ancho (mm)Alto
(mm)
Err
or A
bsol
uto
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
(a) (b)
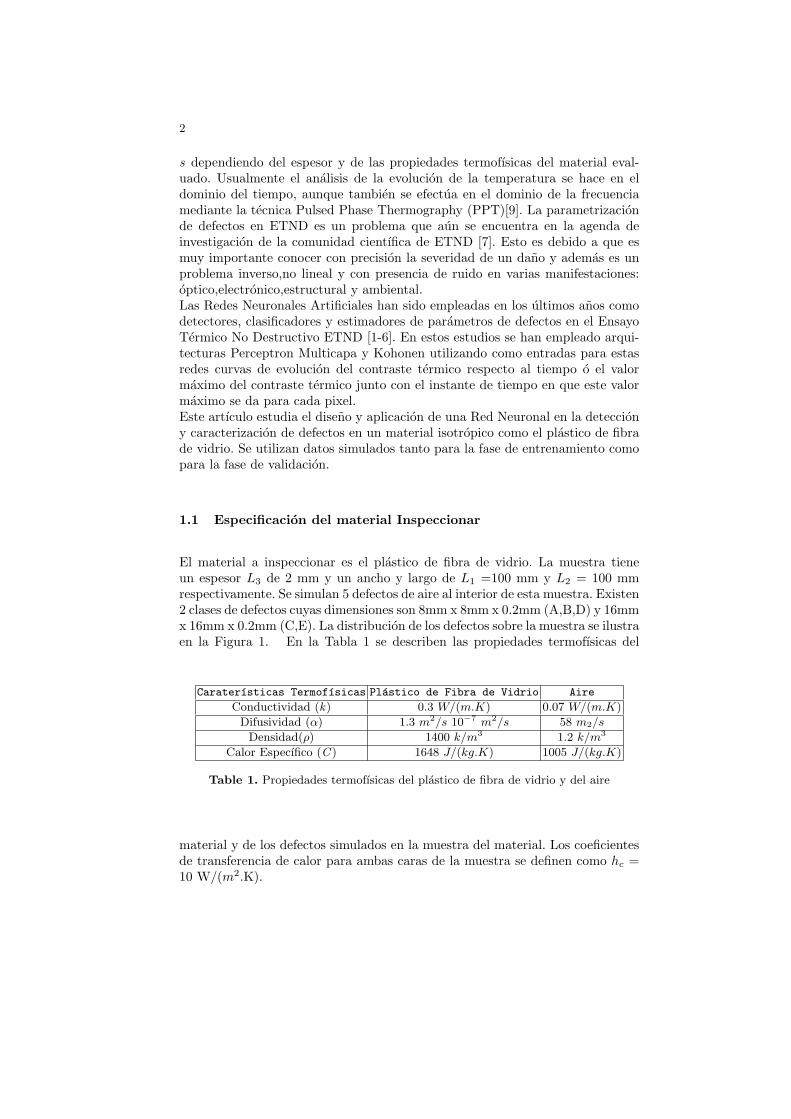
Fig. 3. Muestra de Validacion 1,Resultados de la Red Neuronal para defectos(A,B,C,D,E) a 0.1,0.4,0.7,1,1.3 mm :(a)Vista 3D (b)Error absoluto
0
20
40
60
80
100020406080100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Ancho(mm)Alto
(mm)
Pro
fund
idad
(mm
)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
A
B
C
D
E
0
20
40
60
80
100
020
4060
80100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Ancho(mm)
Alto(mm)
Err
or
Abs
olut
o
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
A
B C
D
E
(a) (b)
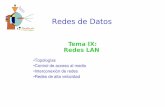
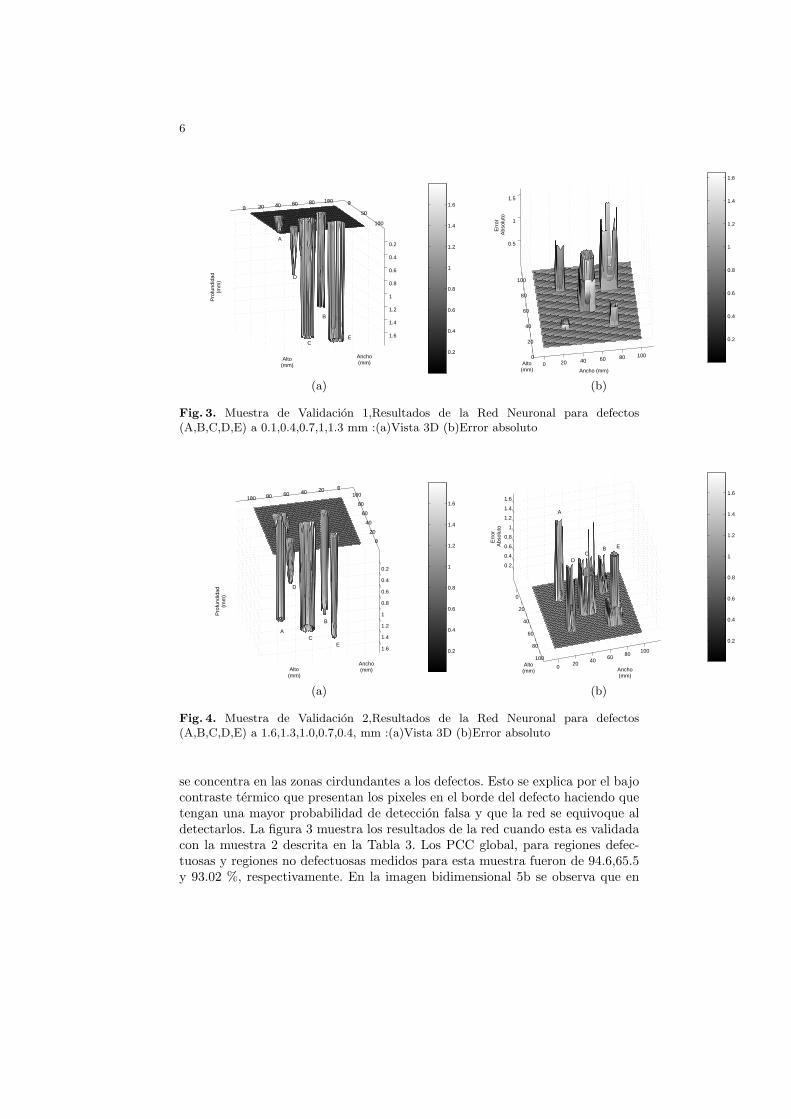
Fig. 4. Muestra de Validacion 2,Resultados de la Red Neuronal para defectos(A,B,C,D,E) a 1.6,1.3,1.0,0.7,0.4, mm :(a)Vista 3D (b)Error absoluto
se concentra en las zonas cirdundantes a los defectos. Esto se explica por el bajocontraste termico que presentan los pixeles en el borde del defecto haciendo quetengan una mayor probabilidad de deteccion falsa y que la red se equivoque aldetectarlos. La figura 3 muestra los resultados de la red cuando esta es validadacon la muestra 2 descrita en la Tabla 3. Los PCC global, para regiones defec-tuosas y regiones no defectuosas medidos para esta muestra fueron de 94.6,65.5y 93.02 %, respectivamente. En la imagen bidimensional 5b se observa que en
7
0 20 40 60 80 1000
50100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Ancho(mm)
Alto(mm)
Pro
fund
idad
(mm
)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
A
B
C
D
E
0
20
40
60
80
100
020406080100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Ancho(mm)Alto
(mm)
Pro
fund
idad
(mm
)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
A B
C
E
(a) (b)
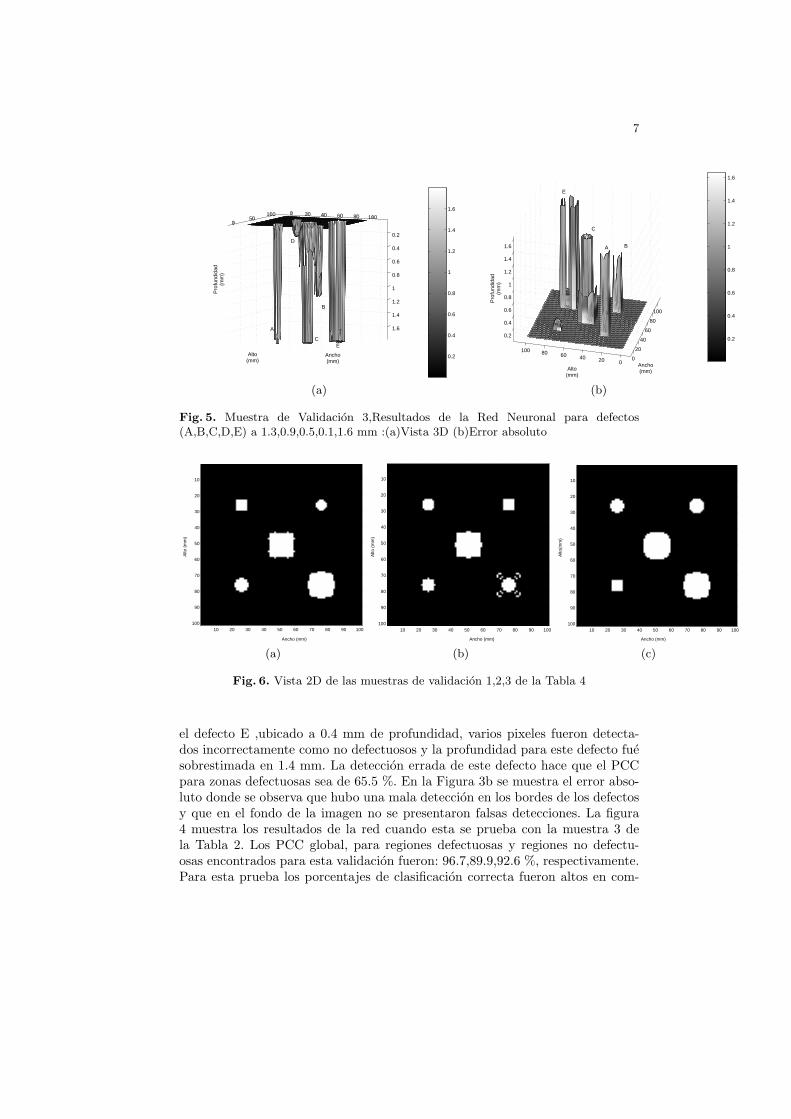
Fig. 5. Muestra de Validacion 3,Resultados de la Red Neuronal para defectos(A,B,C,D,E) a 1.3,0.9,0.5,0.1,1.6 mm :(a)Vista 3D (b)Error absoluto
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Ancho (mm)
Alto
(m
m)
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Ancho (mm)
Alto
(m
m)
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
Ancho (mm)
Alto
(mm
)
(a) (b) (c)
Fig. 6. Vista 2D de las muestras de validacion 1,2,3 de la Tabla 4
el defecto E ,ubicado a 0.4 mm de profundidad, varios pixeles fueron detecta-dos incorrectamente como no defectuosos y la profundidad para este defecto fuesobrestimada en 1.4 mm. La deteccion errada de este defecto hace que el PCCpara zonas defectuosas sea de 65.5 %. En la Figura 3b se muestra el error abso-luto donde se observa que hubo una mala deteccion en los bordes de los defectosy que en el fondo de la imagen no se presentaron falsas detecciones. La figura4 muestra los resultados de la red cuando esta se prueba con la muestra 3 dela Tabla 2. Los PCC global, para regiones defectuosas y regiones no defectu-osas encontrados para esta validacion fueron: 96.7,89.9,92.6 %, respectivamente.Para esta prueba los porcentajes de clasificacion correcta fueron altos en com-

8
paracion con las pruebas anteriores.El error absoluto mostrado en la Figura 4by la imagen bidimensional 5c indican que no hubo falsas detecciones en el fondode la imagen y que los bordes de los defectos son incorrectamente clasificados.Los PCC obtenidos con las muestras de validacion 5 y 4, que se muestran en laTabla 4, indican que la red es capaz de detectar defectos pequenos (A,B,D) quese encuentran a profundidades altas (1.6 mm,1.7 mm,1.8 mm) y que no fueronpresentadas en la etapa de entrenamiento de la red (1.8 mm y 0.1 mm).
5 Conclusiones
Se demostro que una red neuronal puede ser entrenada usando datos de simu-lacion para calcular parametros de defectos en Ensayo Termografico No Destruc-tivo,ademas el analisis mediante redes neuronales de la evolucion en el tiempodel contraste termico relativo entrega una clasificacion confiable (defectuoso,nodefectuoso) de distintas regiones de una muestra de Plastico de Fibra de Vidrio.Por otro lado, la red no clasifica bien los bordes de los defectos debido a que laamplitud del contraste termico para cada pixel decrece cuando la distancia alcentro del defecto aumenta y la red se le dificulta distinguir entre un pixel queesta en el borde del defecto y un pixel no defectuoso. Finalmente, la red actua eneste caso como un regresor que estima la profundidad de los defectos presentesen una muestra, sin embargo puede usarce otra aproximcion en donde exista unared que se encarga de detectar los pıxeles defectuosos y otra red que se encargade caraterizar estos pıxeles.
6 Agradecimientos
Los autores desean expresar su reconocimiento al Instituto Colombiano de Cien-cia Y Tecnologıa COLCIENCIAS y a la Universidad del Valle.
References
1. Darabi and X. Maldague,Neural Network Based Defect Detection and Depth Esti-mation in TNDE, Submitted to NDT E International, September 2000.
2. S. Vallerand, X.Maldague, Defect characterization in pulsed thermography : a sta-tistical method compared with Kohonen and Perceptron neural networks, NDT EInternational 33 (2000) 307-315.
3. S. Vallerand, A. Darabi, X. Maldague, Defect Detection in Pulsed Thermography:A Comparison of Kohonen and Perceptron Neural Networks Part of the SPIE Con-ference on Thermosense XXI. Orlando, Florida April 1999.
4. Maldague X.Largouet Y, Couturier JP,Depth Study in Pulse Phase Ther-mography using neural networks :modelling,noise,experiments.Revue Gnrale deThermique,704-708,1998.
5. Bison P.G,Marinetti S,Manduchi G,Grinzato E, Improvement of Neural Networksperformances in thermal NDE,in Maldague X.ed., Advances in Signal Processingfor Nondestructive Evaluation of Materials,3rd Quebec Workshop(1997),QuebecCity,American Society of Nondestructive Testing Press,TONES ,221-227,1998.

9
6. Bison P.G,Bressan C,Di Sarno R.Grinzato E.,Marinetti S,Manduchi G. ThermalNDE of Delaminations in plastic materials by neural network processing,QUIRT94-Eurotherm Series 42 EETI ed,Paris 1995.
7. X.Maldague ,Theory and Practice of Infrared Technology for NondestructiveTesting,Wiley-Interscience,684 p.(2001).
8. H.Benitez, H.Loaiza, E.Caicedo, Application of Image Processing Algorithms forImage Enhancement and Defect Detection in Infrared Thermography for Nonde-structive Testing, Memorias del IX Simposio de Tratamiento de Senales e Imagenesy Vision Artificial, Manizales, ISBN 958-9322-91-3.
9. X.Maldague,S.Marinetti, Pulse Phase Infrared Thermography, J Appl Phys 79 (5): 2694-2698 , 1996.
10. Y.Cengel,Heat Transfer : a practical approach,2 ed,Mc Graw-Hill,932 p,(2003)11. S.Haykin,Neural Networks : A comprehensive foundation ,2nd ed Prentice Hall
1999.12. M.B Santey and M B Almond,An artificial neural network interpreter for transient
thermography data NDT E International Vol 30 No 5 pp 291-295,1997.
1