RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG …
67
SKRIPSI RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS BERBASIS ANDROID DAN PROGRAMMABLE LOGIC CONTROLLER DISUSUN OLEH : QUDRAT HAKIM NIM : 2016-11-269 PROGRAM STUDI S1 TEKNIK ELEKTRO FAKULTAS KETENAGALISTRIKAN DAN ENERGI TERBARUKAN INSITUT TEKNOLOGI PLN JAKARTA 2021
Transcript of RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG …

SKRIPSI
RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS BERBASIS ANDROID DAN
PROGRAMMABLE LOGIC CONTROLLER
DISUSUN OLEH :
QUDRAT HAKIM NIM : 2016-11-269
PROGRAM STUDI S1 TEKNIK ELEKTRO FAKULTAS KETENAGALISTRIKAN DAN ENERGI TERBARUKAN
INSITUT TEKNOLOGI PLN JAKARTA 2021

RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS BERBASIS ANDROID DAN
PROGRAMMABLE LOGIC CONTROLLER
SKRIPSI
Diajukan untuk Memenuhi Sebagai Persayaratan Guna Memperoleh Gelar Sarjana Teknik Elektro
Disusun Oleh:
QUDRAT HAKIM NIM : 2016-11-269
PROGRAM STUDI S1 TEKNIK ELEKTRO FAKULTAS KETENAGALISTRIKAN DAN ENERGI TERBARUKAN
INSITUT TEKNOLOGI PLN JAKARTA 2021


iv
LEMBAR PENGENSAHAN PEMBIMBING
SKIRPSI
RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS
BERBASI ANDROID DAN PROGRAMMABLE LOGIC CONTROLLER
Disusun Oleh
QUDRAT HAKIM
NIM : 2016-11-269
Diajukan untuk memenuhi persayaratan
PROGRAM STUDI S1 TEKNIK ELEKTRO
FAKULTAS KETENAGALISTRIKAN DAN ENERGI TERBARUKAN
INSTITUT TEKNOLOGI PLN
Jakarta, 19 Januari 2021
Mengetahui,
Kepala Program Studi
S1 Teknik Elektro
(Tony Koerniawan, ST., MT.)
0325018402
Disetujui,
Dosen Pembimbing Utama
(Tri Wahyu Oktaviana Putri, S.T., M.T.)
0318109201
Dosen Pembimbing Kedua
(Meyhart TB Sitorus, S.T., M.Eng.)
0320059004
Tri WahyuOktavianaPutri, ST.,MT
Digitally signed by Tri Wahyu Oktaviana Putri, ST., MTDN: cn=Tri Wahyu Oktaviana Putri, ST., MT gn=Tri Wahyu Oktaviana Putri, ST., MT c=IDIndonesia l=ID Indonesia o=FKET ou=IT PLN [email protected]: I am approving this documentLocation: Date: 2021-02-04 06:12+07:00
endat
Stamp

v
LEMBAR PENGESAHAN TIM PENGUJI
SKRIPSI
RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS
BERBASI ANDROID DAN PROGRAMMABLE LOGIC CONTROLLER
Disusun Oleh
QUDRAT HAKIM NIM : 2016-11-269
Telah disidangkan dan dinyatakan LULUS pada sidang Skripsi Pada Program Studi S1 Teknik Elektro Fakultas Ketenagalistrikan dan Energi
Terbarukan Institut Teknologi PLN pada ______________
TIM PENGUJI
Nama Jabatan Tanda Tangan
Tasdik Darmana, Ir., M.T. Ketua Penguji
Sofitri Rahayu, S.Pd., M.Eng. Sekertaris Penguji
Aas Wasri Hasanah, S.Si., M.T. Anggota Penguji
Mengetahui, Kepala Program Studi
S1 Teknik Elektro
Tony Koerniawan, ST., MT. 0325018402
endat
Stamp
PRODIS1ELEKTRO
Placed Image
PRODIS1ELEKTRO
Placed Image
Sugeng-S1 TE
Textbox
Tanggal 16 Februari 2021

vi
UCAPAN TERIMA KASIH
Dengan ini saya menyampaikan penghargaan dan ucapan terima kasih yang sebesar-
besarnya kepada yang terhormat :
Tri Wahyu Oktaviana Putri, S.T., M.T. Selaku Dosen Pembimbing Utama
Meyhart TB Sitorus, S.T., M.Eng. Selaku Dosen Pembimbing Kedua
Yang telah memberikan petunjuk, saran-saran serta bimbingannya sehingga Skripsi ini
dapat diselesaikan.
Terima kasih yang sama, saya sampaikan kepada :
1. Bapak Ibnu Hajar, S.T., M.Sc.
Yang telah mengijinkan melakukan percobaan di laboratorium Sistem Kontrol.
Jakarta, 19 Januari 2021
Qudrat Hakim 201611269

vii
KATA PENGANTAR Puji dan syukur penulis ucapkan kepada Allah SWT atas kehendak-Nya maka
penelitian dan penulisan skripsi dengan judul “Rancang Bangun Kendali Jarak Jauh Pada
Gerbang Otomatis Berbasis Android dan Programmable Logic Controller” ini dapat
diselesaikan dengan baik. Penulis menyadari bahwa penulisan skripsi ini masih jauh dari
sempurna oleh karena keterbatasan kemampuan dan pengetahuan yang penulis dapatkan,
oleh karena itu dengan kerendahan hati penulis memohon maaf atas segala kekurangan.
Pada kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-
besarnya kepada pihak-pihak yang memberikan dukungan motivasi, saran serta do’a.
Penulis ingin mengucapkan terima kasih kepada :
1. Teristimewa kepada orang tua saya yang saya cintai yaitu Bapak Agung Nuryanto
dan Ibu Lolita yang telah memberikan motivasi, dan doa sehingga penelitian dan
penulisan ini berjalan dengan baik dan lancar.
2. Teman-teman seperjuangan Dimas Bagus, Andre Kaparang, Dia Triutami, Rama
Samudra, Advi, Fendi.
3. Teristimewa juga kepada Nur Rahma Aziza, Indah Nur Oktavia, Aisyah Inggit
yang sudah memberikan motivasi dan dukungan serta doa kepada penulis.
Jakarta, 19 Januari 2021
Qudrat Hakim
201611269

viii
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI SKRIPSI
UNTUK KEPENTINGAN AKADEMIS
Sebagai sivitas akademika Institut Teknologi – PLN, saya yang bertanda tangan di bawah
ini :
Nama : Qudrat Hakim
NIM : 2016-11-269
Program Studi : S1 Teknik Elektro
Fakultas : Ketenaga Listrikan dan Energi Terbarukan
Jenis Karya : Skirpsi
Demi pengembangan ilmu pengetahuan, menyetuji untuk memberikan kepada Institut
Teknologi – PLN Hak Bebas Royalti Non ekslusif (Non- exclusive Royalty Free Right)
atas karya ilmiah saya yang berjudul :
Rancang Bangun Kendali Jarak jauh Pada Gerbang Otomatis Berbasis Android
dan Programmable Logic Controller
Beserta perangkat yang ada (jika diperlukan). Dengan Hak Bebas Royalti Non Ekslusif
ini Institut Teknolgoi PLN Berhak menyimpan, mengaluh media/formatkan, mengelola
dalam bentuk pangkalan data (database), merawat, dan mempublikasikan Skripsi saya
selama tetap mencantumkan nama saya sebagai penulis/pencipta dan sebagai pemilik
Hak Cipta.
Demikian pertanyaan ini saya buat dengan sebenarnya.
Dibuat di : Bekasi Pada tanggal : 19 Januari 2021
Yang menyatakan,
(Qudrat hakim)

ix
RANCANG BANGUN KENDALI JARAK JAUH PADA GERBANG OTOMATIS BERBASIS ANDROID DAN PROGRAMMABLE
LOGIC CONTROLLER
Qudrat Hakim, 2016-11-269
dibawah bimbingan Tri Wahyu Oktaviana Putri dan Meyhart TB Sitorus
ABSTRAK Penggunaan pintu gerbang untuk keamanaan tempat tinggal merupakan hal yang lazim ditemui. Umumnya pintu gerbang tersebut dioperasikan secara manual. Hal ini dirasa kurang efisien dan menimbulkan ketidak nyamanan pengguna pintu gerbang, baik yang ada didalam gerbang maupun yang mengendrai kendaraan bermotor. Dari permasalahan diatas maka dari itu dibuat suatu kendali jarak jauh pada pintu gerbang berbasis programmable logic controller (PLC) dan android sebagai pusat kendali yang menampilkan tampilan antarmuka bagi pengguna. Pada penelitian ini, diciptakan suatu kendali jarak jauh pada pintu gerbang yang dapat dikendalikan melalui perangkat android yang terkoneksi wifi. Dengan dibuatnya kendali jarak jauh pada pintu gerbang dengan menggunakan koneksi wifi yang berbasisi programmable logic controller dan android sebagai pusat kendalinya, yang dimana pintu gerbang otomatis dapat dikendalikan dengan jarak hingga 20 meter dengan menggunakan motor dc sebagai penggerak gerbang otomatis serta sensor E3F-DS30P1 sebagai pendeteksi objek diharapkan dapat mempermudah pengguna dalam membuka dan menutup pintu gerbang tanpa harus keluar dari mobil ataupun keluar rumah serta memaksimalkan efisiensi waktu.
Kata kunci : Programmable Logic Controller, Android, Gerbang Otomatis, Kendali
Jarak Jauh

x
DESIGN AND BUILD DISTANCE CONTROLS IN ANDROID BASED AUTOMATIC GATE AND PROGRAMMABLE LOGIC
CONTROLLER
Qudrat Hakim, 2016-11-269
Under the Guidance of Tri Wahyu Oktaviana Putri and Meyhart TB Sitorus
ABSTRACT
The use of gates for the security of a residence is a common thing. Generally, the gate is operated manually. This is considered inefficient and causes inconvenience for gate users, both those inside the gate and those driving motorized vehicles. From the above problems, therefore a remote control is made at the gate based on the programmable logic controller (PLC) and android as a control center that displays the user interface. In this study, remote control at the gate was created that can be controlled via an android device connected to wifi. With the making of remote control at the gate using a wifi connection based on a programmable logic controller and android as the control center, where the automatic gate can be controlled with a distance of up to 20 meters using a dc motor as an automatic gate drive and the E3F-DS30P1 sensor as a detector. The object is expected to make it easier for users to open and close the gate without having to get out of the car or leave the house and maximize time efficiency.
Key words : Programmable Logic Controller, Android, Remote Control, Automatic Gate

xi
DAFTAR ISI
Latar Belakang ........................................................................................................ 1 Rumusan Masalah ................................................................................................... 2 Batasan Masalah...................................................................................................... 3 Tujuan ..................................................................................................................... 3 Manfaat ................................................................................................................... 3 Ruang Lingkup Masalah ......................................................................................... 3 Sistematika Penulisan ............................................................................................. 4
Penelitian Yang Relevan ......................................................................................... 5 Landasan Teori ........................................................................................................ 6
Tempat Dan Waktu Penelitian .............................................................................. 19 Desain Penelitian ................................................................................................... 19 Metode Pengumpulan Data ................................................................................... 22 Metode Analisis Data ............................................................................................ 22 Blok Diagram Kendali Jarak Jauh......................................................................... 24 Spesifikasi Komponen .......................................................................................... 25 Jadwal Penelitian ................................................................................................... 26
Prototipe Gerbang ................................................................................................. 27 Pengujian Sensor Photoelektrik E3F-DS30P1 ...................................................... 28 Pengujian Motor DC ............................................................................................. 30 Pengujian Limit Switch ......................................................................................... 31 Pengujian Jarak Konektifitas Wifi ......................................................................... 32 Pengujian Aplikasi Android .................................................................................. 33 Pembuatan Ladder Diagram .................................................................................. 34 Pengujian Keseluruhan.......................................................................................... 40

xii
Kesimpulan ........................................................................................................... 43 Saran ...................................................................................................................... 43

xiii
DAFTAR GAMBAR Gambar 2.1 Programmable Logic Controller (PLC)......................................................... 6
Gambar 2.2 Stuktrur Kerja PLC ....................................................................................... 6
Gambar 2.3 Rangkaian Opto-Isolator Antarmuka Masukan............................................. 7
Gambar 2.4 Rangkaian Opto-Isolator Antarmuka Keluaran ............................................. 8
Gambar 2.5 Limit Switch .................................................................................................. 9
Gambar 2.6 Konstruksi Limit Switch ............................................................................. 10
Gambar 2.7 Jenis-jenis Limit Switch .............................................................................. 10
Gambar 2.8 Motor DC .................................................................................................... 11
Gambar 2.9 Rangkaian Ekivalen Motor DC ................................................................... 11
Gambar 2.10 Komponen Motor DC ............................................................................... 12
Gambar 2.11 Rangkaian H-Bridge Pada Modul Relay 2 Channel ................................. 13
Gambar 2.12 Prinsip Kerja Relay ................................................................................... 14
Gambar 2.13 Proximity Sensor ....................................................................................... 16
Gambar 2.14 Photoelectric sensor .................................................................................. 18
Gambar 2.15 Ladder Diagram......................................................................................... 18
Gambar 3.1 Diagram Alir ............................................................................................... 19
Gambar 3.2 Blok Diagram Kendali Jarak Jauh ............................................................... 24
Gambar 4.1 Detail Ukuran Gerbang ............................................................................... 27
Gambar 4.2 Prototipe Gerbang Tampak Depan .............................................................. 28
Gambar 4.3 Prototipe Gerbang Tampak Belakang ......................................................... 28
Gambar 4.4 Rangkaian Pengujian Sensor E3F-DS30P1................................................. 29
Gambar 4.5 Rangkaian Pengujian Motor DC ................................................................. 30
Gambar 4.6 Rangkaian Limit Switch .............................................................................. 31
Gambar 4.7 Pengujian Konektifitas Wifi ........................................................................ 32
Gambar 4.8 Pengiriman Perintah pada PLC ................................................................... 34
Gambar 4.9 Ilustrasi Cara Kerja Gerbang ....................................................................... 37
Gambar 4.10 Software GX Developer ............................................................................ 37
Gambar 4.11 Setting Project ........................................................................................... 38
Gambar 4.12 Laman Project ........................................................................................... 38
Gambar 4.13 Ladder Diagram......................................................................................... 39

xiv
DAFTAR TABEL Tabel 3.1 Spesifikasi Komponen .................................................................................... 25
Tabel 3.2 Tabel Jadwal Penelitian .................................................................................. 26
Tabel 4.1 Hasil Pengujian Sensor E3F-DS30P1 ............................................................. 29
Tabel 4.2 Pengukuran Jarak Konektifitas ....................................................................... 33
Tabel 4.3 Konfigurasi Input dan Output ......................................................................... 35
Tabel 4.4 Pengujian Ladder Diagram Motor Buka ......................................................... 40
Tabel 4.5 Pengujian Ladder Diagram Motor Tutup ........................................................ 40
Tabel 4.6 Tabel Kebenaran Ketika Mobil Masuk ........................................................... 41
Tabel 4.7 Tabel Kebenaran Mobil Keluar....................................................................... 42

1
PENDAHULUAN
Latar Belakang
Berkembangnya teknologi saat ini semakin banyak dan memberikan kemudahan
pada manusia dalam kehidupan sehari-hari. Dalam banyak hal banyak diterapkan
teknologi, sehingga pekerjaan dapat dilakukan dengan mudah tanpa memberi energi lebih
serta dapat mempersingkat waktu dalam melakukan pekerjaan. Berbagai macam alat dari
alat rumah tangga hingga alat kerja menggunakan teknologi, terlebih lagi pada alat
elektronika sehingga pekerjaan jauh lebih ringan dan mudah. Pemanfaatan alat
elektronika seperti telepon pintar android pada kehidupan di masa sekarang tidak dapat
dipugkiri setiap manusia menggunakan telepon pintar android, dari penggunaan untuk
berkomunikasi hingga dimanfaatkan sebagai alat pengontrol buka atau tutup pintu
gerbang otomatis, dengan memanfaatkan sistem ini tanpa harus mendorong serta menarik
pintu gerbang yang memhabiskan tenaga serta waktu.
Pintu gerbang merupakan suatu sistem pengamanan dalam rumah atau kantor
yang digunakan juga untuk akses masuk atau keluar, biasanya pintu gerbang dijaga oleh
seorang petugas yang bertugas untuk membuka dan menutup pintu gerbang, sedangkan
bagi orang yang berada di dalam rumah dan di dalam mobil merasa enggan untuk keluar
hanya untuk membuka pagar. Dalam hal ini membuka pintu gerbang secara manual dirasa
kurang efisien, oleh sebab itu penggunaan sistem kendali otomatis dalam buka atau tutup
pintu gerbang menggunakan tombol atau melakukan perintah lewat telepon pintar android
dapat memberikan kemudahan serta menghemat waktu dan tenaga sehingga tidak perlu
mendorong dan menarik pintu gerbang secara manual.
Sistem kendali otomatis adalah sistem yang memiliki acuan masukan atau
keluaran yang dikehendaki secara konstan atau berubah sewaktu-waktu, sistem kendali
otomatis pada pintu gerbang ini dapat dikendalikan melalui tombol maupun telepon pintar
android dengan koneksi wifi, kendali melalui telepon pintar android dapat dilakukan
dimana saja selama telepon pintar android masih terkoneksi dengan wifi yang sama
dengan sistem kendali pintu gerbang otomatis. Digunakannya wifi sebagai penghubung
antar sistem kendali pintu gerbang dengan pengendali pintu gerbang karena wifi terdapat
hampir disemua perangkat telepon pintar terlebih lagi teknologi wifi ini dapat
diaplikasikan di area yang cukup luas dan memiliki kecepatan transfer data yang sangat

2
cepat karena itu wifi menjadi media yang sangat bagus untuk digunakan pada sistem
kendali otomatis ini. Sistem kendali otomatis yang digunakan pada penelitian kali ini
berbasis PLC atau programable logic controller, PLC disini akan difungsi sebagai
pengontrol putaran motor DC untuk membuka atau menutup pintu gerbang secara
ototmatis dibantu dengan saklar jenis limit switch sebagai pemicu untuk menggerakan
motor DC untuk menutup dan membuka pintu gerbang secara otomatis.
Pada penelitian ini akan dibuat prototipe kendali jarak jauh gerbang otomatis yang
menggunakan wifi berbasis PLC dan android, sebuah alat yang akan sangat
mempermudah kegiatan manusia serta menambahkan protokol keamanan pada rumah
atau gedung yang berada di dalamnya. Prototipe kendali jarak jauh gerbang otomatis
berbasis PLC dan android ini menggunakan wifi sebagai media penghubung antar PLC
dan Android. PLC digunakan sebagai kendali utama pada prototipe ini, digunakannya
PLC pada prototipe kendali jarak jauh ini karena PLC memilki kemudahan untuk
melakukan perbaikan apabila terjadi kesalahan atau rusak pada program, serta memiliki
kecepatan oprasi hingga 0,01 second, oleh karena itu PLC sangat cocok digunakan pada
penelitian ini.
Selain menggunakan PLC, prototipe kendali gerbang jarak jauh ini juga
memerlukan android dan sensor. Android diperlukan sebagai alat untuk memberikan
perintah-perintah yang akan di terima oleh PLC. Pada prototipe ini juga menggunakan
sensor, sensor yang di gunakan adalah sensor photoelektrik. Sensor photoelektrik adalah
sensor yang memanfaatkan elemen cahaya untuk mendeteksi obyek maka dari itu
digunakan sebagai pendeteksi objek saja dan ketika objek berada didekat sensor makan
sensor akan mengirimkan sinyal pada android yang digunakan sebagai alat kendali jarak
jauh pada prototipe ini.
Rumusan Masalah
Berdasarkan latar belakang di atas maka dapat dirumuskan beberapa
permasalahan pada penelitian ini :
1. Bagaimana perancangan prototipe gerbang otomatis berbasis Android dan PLC?
2. Bagaimana perancangan ladder diagram PLC untuk kendali jarak jauh pada
prototipe gerbang otomatis berbasis Android dan PLC?

3
3. Bagaimana hasil pengujian keseluruhan sistem kendali jarak jauh pada prototipe
gerbang otomatis berbasis Android dan PLC?
Batasan Masalah
Agar pembahasan tidak menyimpang dari yang diharapkan, maka permasalahan
dibatasi pada :
1. Kendali jarak jauh pada prototipe gerbang otomatis berbasis android dan
programmable logic controller hanya dapat bekerja ketika hanya ada 1 mobil saja
yang akan keluar atau masuk.
2. Pada penelitian kendali jarak jauh pada gerbang otomatis ini hanya menggunakan
mobil sebagai objek penelitiannya.
Tujuan
Penelitian ini bertujuan untuk membuat prototipe kendali jarak jauh gerbang
otomatis berbasis android dan PLC yang memanfaatkan wifi sebagai media penghubung
antara android dengan PLC serta menggunakan sensor photoelektrik sebagai pendeteksi
objek.
Manfaat
Manfaat yang diharapkan dari penelitian ini adalah :
1. Peneliti dapat mengetahui kehandalah kendali jarak jauh dengan berbasis android
dan PLC pada pengaplikasian di pintu gerbang, serta mengetahui ketepatan sistem
kendali PLC sebagai bahan kajian dan pengetahuan.
2. Memberikan kemudahan untuk mengendalikan pintu gerbang dengan
menggunakan telepon pintar yang terkoneksi wifi.
3. Dengan adanya penelitian ini, maka dapat dijadikan dasar tentang pengaplikasian
sistem kendali berbasis PLC.
Ruang Lingkup Masalah
Demi tercapainya tujuan penelitian maka dibuatlah ruang lingkup masalah,
sebagai berikut :
1. Merancang sistem kendali pintu gerbang otomatis berbasis PLC menggunakan
telepon pintar android dengan koneksi wifi.

4
2. Pengaplikasian sistem kendali pintu gerbang otomatis dengan menggunakan
telepon pintar android menggunakan koneksi wifi.
Sistematika Penulisan
Skripsi ini terdiri dari lima bab dengan sistematika penulisan sebagai berikut :
BAB I Pendahuluan
Membahas latar belakang, rumusan masalah, tujuan dan manfaat sekaligus
ruang lingkup masalah.
BAB II Tinjuan Pustaka
Membahas teori-teori yang mendukung dalam penelitian dan perancangan
alat.
BAB III Metode Penelitian
Membahas metode penelitian dan perancangan alat.
BAB IV Hasil dan Pembahasan
Membahas hasil pengujian alat yang sudah dibuat dan analisis hasil yang
diperoleh.
BAB V Penutup
Membahas kesimpulan penelitian dan saran-saran yang diperlukan untuk
pengembangan penelitian selanjutnya.

5
TINJAUAN PUSTAKA
Penelitian yang Relevan
Penelitian mengenai sistem kendali otomatis pintu gerbang otomatis telah banyak
dilakukan menggunakan berbagai macam metode dan pengklasifikasian. Penelitian yang
berjudul Sistem Kendali Otomatis Pada Pintu Gerbang Menggunakan Bluetooth Berbasis
Mikrokontroler oleh Ryan Noferiawan pada tahun 2018(Noferiawan, 2018). Namun
penggunaan bluetooth sebagai media komunikasinya akan menjadi keterbatasan dalam
sistem, karena bluetooth memiliki keterbatasan jangkauan penggunaan yaitu hanya
berjarak ±10 meter terlebih lagi apabila ada gangguan berupa penghalang seperti tembok
ataupun gangguan elektromagnetis maka ada kemungkinan terjadi kegagalan dalam
mengirim data.
Selanjutnya penelitian yang dilakukan oleh Yohanes Setiawan pada tahun 2015
mengenai rancang bangun buka tutup pintu pagar rumah menggunakan remote control
wireless RF315, pada penelitianya yang menggunakan remote control wireless RF315
terdapat kekurangan pada penelitian tersebut yaitu jangkauan yang terbata. Penggunaan
remote control wireless RF315 yang memeliki keterbatasan jarak menjadi kelemahan
pada penelitian rancang bangun tersebut karena pengguna remote control wireless RF315
harus berada dijarak yang tidak terlalu jauh dari pintu gerbang(Fitri & Setiawan, 2015).
Muhammad Rizki Maulana pada tahun 2018 mengenai perancangan sistem pengendali
pintu pagar otomatis menggunakan android speech recognition berbasis arduino(Rizki,
2018). Metode yang digunakan adalah berbasis arduino.
Dari keterbatasan penelitian diatas maka dibuatlah penelitian sistem kendali
gerbang otomatis dengan telepon pintar android berbasis PLC. PLC memiliki
keunggulan-keunggulan dibanding sistem kendali konvesional dan Arduino, diantaranya
PLC memiliki port I/O yang banyak, dapat melakukan pemrograman ulang dengan
mudah dan koreksi program dengan mudah, serta perawatan yang mudah dan penggantian
komponen-komponen pada sistem yang menggunakan PLC dapat dilakukan dengan
mudah. Penelitian ini mengembangkan sistem kendali otomatis pada gerbang berbasis
PLC.

6
Landasan Teori
Programmable Logic Controller (PLC)
Gambar 2.1 Programmable Logic Controller (PLC)
Programmable Logic Controller (PLC) merupakan sebuah alat kendali
yang dapat dibeirkan program yang sudah dirancang untuk beroprasi secara
digital, dapat menjalankan fungsi-fungsi logika seperti fungsi
aritmatika,pencacah dan fungsi lainnya yang sudah disimpan pada memori
internal untuk menyimpan instruksi sudah diprogram(Triawati & Aritonang,
2012). PLC biasa digunakan untuk menggantikan rangkain timer dan rangkain
relay pada sistem kendali konvensional. Struktur utama PLC terbagi menjadi
empat kelompok komponen utama seperti CPU, unit memory, antarmuka
masukan dan antar muka keluaran.
Gambar 2.2 Stuktrur Kerja PLC
Unit Memory
CPU Antarmuka Masukan Antarmuka Keluaran

7
• CPU
Central Processing Unit (CPU) adalah tempat berjalannya pusat
pemrosesan dari semua perintah atau instruksi yang diberikan pada PLC,
sekaligus menjadi ruang penyimpanan internal dan sirkuit pengendali. Pada
PLC, CPU juga dapat melaukan komunikasin dan interaksi dengan
komponen lainnya.
• Unit Memory
Beberapa bagian dalam unit memory pada PLC memiliki fungsi-fungsi
tersendiri, masing-masing memory memiliki kapasitas 16 bit atau 1 word.
Fungsi-fungsi yang ada pada masing masing unit antara lain untuk
menyimpan status dari input dan output sedangkan bagian lain digunakan
untuk menyimpan nilai variable yang digunakan pada program yang sudah
dirancang seperti nilai counter dan timer.
• Antarmuka Masukan
Antarmuka masukan merupakan sebuah rangkaian yang terhubung
langsung dengan input (masukan) CPU. Rangkaian ini memiliki tujuan
untuk menjaga CPU agar tidak ada sinyal-sinyal yang dapat merusak CPU,
seperti sinyal-sinyal yang tidak dikehendaki tidak dapat masuk ke CPU.
Rangkaian antarmuka masukan ini memiliki fungsi mengubah sinyal dari
perangkat masukan (input) menjadi sinyal yang sesuai dengan tegangan
kerja CPU.
Gambar 2.3 Rangkaian Opto-Isolator Antarmuka Masukan

8
Prinsip kerja rangkain opto-isolator ini ketika perangkat eksternal
mengirimkan sinyal maka LED akan hidup, maka phototransistor akan
menerimacahaya tersebut dan akan menghantarkan arus (ON). Pada saat
phototransistor menghantarkan arus (ON) maka CPU akan melihatnya
sebagai logika 1, kemudian CPU akan melakukan eksekusi pada masukan
tersebut berdasarkan program yang ada pada PLC. Begitu sebaliknya ketika
sinyal dari perangkat eksternal tidak ada maka LED akan mati dan
phototransistor akan berhenti menghantarkan arus (OFF), maka CPU akan
melihatnya sebagai logika 0 dan tidak melakukan eksekusi pada masukan
tersebut.
• Antarmuka Keluaran
Sama seperti antarmuka masukan yang membutuhkan rangkaian Opto-
Isolator, rangkaian antarmuka keluaran juga membutuhkan rangkaian Opto-
Isolator agar CPU terlindung dari perangkat-perangkat keluaran.
Gambar 2.4 Rangkaian Opto-Isolator Antarmuka Keluaran
Pada rangkaian antarmuka keluaran yang menghidupkan dan mematikan
LED adalah CPU, sedangkan rangkaian opto-isolator digunakan untuk
penggerak relay. Rangkaian antarmuka keluaran yang mematikan dan
menghidupkan LED adalah CPU, dan rangkaian opto-isolator internal disini
digunakan untuk menggerakan relay. Kondisi relay NO (normally open)

9
sebelum dialiri arus dan jika dialiri arus makan kondisi relay berubah
menjadi NC (normally close). Perubaham pada relay terjadi karena saat
diberi arus, arus mengalir pada kumparan yang menyebabkan induksi
magnet yang membuat perubahan kondisi pada relay. Kondisi NO inilah
yang yang merupakan terminal keluaran dari PLC yang dihubungkan ke
perangkat output.
Sensor Pembatas (Limit Switch)
Limit switch merupakan komponen elektronika jenis saklar yang
mempunyai katup dan berfungsi sebagai pengganti tombol, memberikan batas
pada gerakan suatu mesin sehingga bisa mengontrol gerakan mesin tersebut
agar tidak melebihi batas yang sudah di tentukan (Noferiawan, 2018). Limit
Switch termasuk sensor mekanis, sensor yang bisa mengalami perubahan
elektrik ketika terjadi perubahan mekanik pada sensor tersebut.
Gambar 2.5 Limit Switch
Prinsip kerja limit switch sama seperti saklar push on yang hanya akan
berkerja pada saat katupnya ditekan pada batas penekanan tertentu yang telah
ditentukan dan akan memutus saat katup tidak ditekan(Usman et al., 2017).
Limit Switch akan bekerja pada saat aktuator tertekan oleh suatu benda
pada batas yang sudah ditentukan sebelumnya, sehingga ketika posisi akutator
berubah maka akan terjadi pemutusan atau penghubungan rangkaian dari limit

10
swich. Ketika actuator dari limit switch tertekan suatu benda sebanyak 45º atau
90º tergantung dari tipe limit switch yang digunakan pada rangkaian sistem,
maka actuator akan bergeran kedalam hingga menyentuh micro switch dan
menghubungkan kontak-kontak, micro switch memiliki kontak jenis NO dan
NC. Pada limit switch terdapa head atau kepala tempat dudukan actuator pada
bagian atas dari limit switch dan posisinya dapat diruba-rubah sesuai kebutuhan,
ketikan bagian atas kepala dari limit switch tertekan akan terjadi kontak-kontak
di bagian dalam limit switch.
Konstruksi limit switch dapat dilihat pada gambar 2.6:
Gambar 2.6 Konstruksi Limit Switch
Limit switch biasanya digunakan untuk membuka dan menutup rangkaian
objek. Limit switch memiliki beberapa tipe yang dapat disesuaikan dengan
kebutuhan pengoprasiannya di lapangan, seperti gambar 2.7
Gambar 2.7 Jenis-jenis Limit Switch
Motor DC
Motor DC adalah mesin listrik yang menghasilkan torsi mekanik dengan cara
mengkonsimsi daya listik (Masrukhan et al., 2016). Motor DC adalah sebuah perangkat
Tri Wahyu Oktaviana Putri, ST., MT
Setelah pembahasan motor DC perlu dibahas driver H-bridge mtoor DC��biar kalo ditanya saat sidang udah ada jawabannya

11
elektronika yang dapat mengkonversi energi listrik menjadi energi mekanik yang berupa
rotasi, pada pengaplikasiannya motor DC memerlukan arus searah untuk dialirkan
menuju kumparan medannya untuk dirubah menjadi energi gerak mekanik. Motor DC
juga termasuk jenis motor listrik yang dapat bekerja dengan menggunakan arus langsung
dan tidak langsung (direct-undirectional) juga sumber tegangan DC. Catu daya yang
digunakan pada motor DC antara 3-24V dan arus 1A.
Gambar 2.8 Motor DC
Motor DC memiliki jangkar dengan satu atau lebih kumparah terpisah, dan setiap
kumparan berujung pada komutator. Kumparan medan pada motor DC disebut stator dan
bagian kumparan jangkar disebut rotor, stator bagian yang tidak berputar sedangkan rotor
bagian yang berputar. Komutator dapat berperan sebagai saklar kutub ganda (double
throw switch, double pole) karena adanya insulator di antara komutator. Gaya Lorentz
menyatakan ketika sebuah konduktor beraliran arus diletakan dalam medan magnet, maka
sebuah gaya akan tercipta secara Orthogonal diantara arah medanmagnet dan arah aliran
arus.
Gambar 2.9 Rangkaian Ekivalen Motor DC

12
2.2.3.1 Konstruksi Motor DC
Gambar 2.10 Komponen Motor DC
Keterangan gambar di atas :
1. Badan Mesin (Body)
Body berfungsi untuk melingdungi bagian yang bergerak dan
meletakan bantalan.
2. Inti Kutub Magnet dan Belitan Penguat Magnet
Inti jangkar berfungsi untuk melakukan fluksi medan. Sedangkan
belitan jangakar berfungsi sebagai pengaktif fluksi jangkar dan
akan bersamaan dengan fluksi utama menimbulkan kopel.
3. Sikat Arang
Bergungsi sebagai penghubung belitan medan dan belitan jangkar.
4. Komutator
Komutator berfungsi sebagai pengubah arah polaritas belitan
jangkar.
5. Jangkar
Memelikiri fungsi agar kimparan jangkar berada di dalam daerah
yang induksi magnetiknya besar, supaya GGL induksi yang
dihasilkan dapat bertambah besar.

13
6. Belitan Jangkar
Belitan jangkar adalah komponen terpenting pada mesin arus
searah. Pada mesin arus searah tempat timbulnya GGL berada pada
belitan jangkar, berbeda dengan motor arus searah yg berfungsi
untuk tempat timbulnya torque.
Motor DC Driver
Menggerakan motor DC sekaligus mengatur arah putaran dari motor
tersebut membutuhkan sebuah driver. Setiap jenis motor DC mempunyai
rangkaian driver yang berbeda-beda, pada penelitian ini menggunakan motor
DC tipe brushed. Driver yang paling sering digunakan untuk menggerakan atau
mengatur arah putarnya biasanya driver dengan instrument rangkaian H-bridge.
H-bridge adalah sebuah rangkaian elektronika yang digunakan untuk
mengatur kerja motor listrik, yang biasanya terdiri dari transistor dan diode
yang berfungsi untuk menggerakan motor (Dyto, 2012). Rangkaian ini diberi
nama H-bridge karena bentuk rangkaiannya menyerupai huruh H.
Pada penelitian ini menggunakan rangkaian H-bridge yang ada pada
modul relay 2 channel, rangkaian H-bridge pada modul relay 2 channel seperti
pada gambar 2.11 berikut :
Gambar 2.11 Rangkaian H-Bridge Pada Modul Relay 2 Channel

14
Prinsip kerja rangkaian ini adalah mengatur urutan aktifnya relay dari
kedua relay tersebut. Pada gambar 2.11 dapat dilihat saat IN1 dalam keadaan
ON dan IN2 dalam keadaan OFF maka akan mengatifkan Q1 pada rangkaian
dan motor akan bergerak kekanan atau searah dengan arah jarum jam
(clockwise). Sebaliknya, ketika IN2 dalam ke ON dan IN1 dalam keadaan OFF
maka akan mengaktifkan Q2 pada rangkaian dan motor akan bergerak kekiri
atau beralawan arah dengan arah jarum jam (counter clockwise).
2.2.4.1 Prinsip Kerja Relay
Prinsip kerja sama seperti kontaktor magnet yaitu sama-sama
berdasarkan kemagnetan yang dihasilkan oleh kumparan koil. Relay
sendiri terdiri dari coil (kumparan) dan contact, coil merupakan
sebuah gulungan kawat yang dialiri arus listrik, sedangkan contact
adalah saklar yang aktifitasnya tergantung pada arus listrik yang
mengalir pada coil, contact terdiri dari 2 jenis yaitu normally open
dan normally close.
Secara sederhana prinsip kerjanya adalah ketika coil dialirin arus
maka akan timbul gaya electromagnet yang akan menarik penyangga,
dan contact akan tertutup.
Gambar 2.12 Prinsip Kerja Relay
WiFi
WiFi adalah sebuah teknologi yang memanfaatkan gelombang radio
sebagai media penghantar agar penggunanya bisa bertukar data secara nirkabel

15
menggunakan perangkat elektronik melalui sebuah jaringan komputer,
termasuk koneksi internet berkecepatan tinggi (Yulianto & Bacharuddin, 2016).
Titik akses atau hotspot WiFi memiliki jangkaun jarak sebesar 20 meter di
dalam ruangan dan bisa lebih luas lagi jika di luar ruangan. Agar sebuah
komputer dapat terhubung jaringan WiFi perlu dilengkapi dengan pengontrol
antarmuka jaringan nirkabel. Gabungan antara computer dan pengontrol
antarmuka disebut stasiun, semua stasiun berbagi saluran frekuensi. Transmisi
di saluran ini dapat diterima oleh semua stasiun yang berada dalam jangkauan.
Android
Android merupakan sebuah sistem oprasi untuk smartphone dan Tablet.
Sistem oprasi dapat digambarkan sebagai jembatan atau penghubung antara
perangkat (device) dan penggunananya, sehingga pengguna bisa berinteraksi
dengan perangkat dan menggunakan apIikasi yang tersedia pada perangkat
(Satyaputra & Aritonang, 2014).
Proximity Sensor
Proximity sensor atau sensor jarak adalah sensor elektronik yang
mendeteksi keberadaan obyek disekitarnya tanpa adanya sentuhan
fisik(TeknikElektronika.com, 2018). Dapat juga dikatakan sensor proximity
adalah perangkat yang dapat mengubah infromasi tentang gerakan atau
keberdaan obyek. Proximity sensor tidak menggunakan bagian yang bergerak
atau bagian mekanik untuk mendeteksi obyek disekitarnya, melainkan
menggunakan medan elektromagnetik ataupun sinar radiasi elektromagnetik
untuk mengetahui apakah ada obyek tertentu disekitarnya. Jarak maksimum
yang dapat di deteksi oleh sensor disebut “nominal range” atau “kisaran
nominal”, beberapa proximity sensor juga dilengkapi fitur pengaturan nominal
range dan pelaporan jarak obyek deteksi.

16
Gambar 2.13 Proximity Sensor
2.2.7.1 Jenis-Jenis Proximity Sensor
1. Inductive Proximity Sensor (Sensor Jarak Induktif)
Sensor jarak induktif merupakan sebuah sensor yang digunakan
untuk mendeteksi logam baik logam jenis ferrous maupun non ferrous.
Sensor ini digunakan untuk mendeteksi keberadaan (ada atau tidaknya
obyek logam), menghitung obyek logam dan aplikasi pemosisian.
2. Capacitive Proximity Sensor (Sensor Jarak Kapasitif)
Sensor jarak kapasitif adalah sensor jarak yang mendeteksi
gerakan, komposisi kimia, tingkat dan komposisi cairan maupun tekanan.
Sensor jarak kapsitif dapat mendeteksi bahan-bahan dielektrik rendah
seperti plastik atau kaca dan bahan-bahan dielektrik yang lebih tinggi
seperti cairan sehingga memungkinkan sensor jenis ini untuk mendeteksi
tingkat banyak bahan melalui kaca, plastic maupun komposisi container
lainnya.
3. ltrasonic Proximity Sensor (Sensor Jarak Ultrasonik)
Ultrasonik proximity sensor adalah sensor jarak yang
menggunakan prinsip operasi yang mirip dengan radar atau sonar yaitu
dengan menghasilkan gelombang frekuensi tinggi untuk menganalisis
gema yang diterima setelah terpantul dari obyek yang mendekatinya.

17
4. Photoelectric Sensor
Photoelectric sensor adalah sensor jarak yang menggunakan
elemen cahaya untuk mendeteksi obyek, sensor ini bekerja akibat adanya
aktifitas atau pergerakan dari suatu cahaya(SensorHaus.id, 2018). Energi
cahaya akan diubah menjadi suatu sinyal listrik. Terdapat 3 jenis
photoelectric sensor yaitu :
1) Trough Beam
Transmitter dan receiver ditempatkan secara berhadapan dan
terpisah. Sensor aktif ketika terjadi pemotongan sinar oleh objek antara
transmitter dan receiver sehingga receiver kehilangan cahaya sesaat. Jenis
photoelectric ini memiliki distance paling Panjang dari jenis lainnya.
2) Retro Reflector
Transmitter dan receiver ditempatkan secara bersamaan dan
membutuhkan suatu refrector untuk pengoprasiannya. Obyek terdeteksi
karenan memotong cahaya antara sensor dan reflector sehingga receiver
tidak menerima cahaya. Photocells ini memungkinkan jarak sensing
lebih jauh. Dengan adanya reflector sinar yang dipancarkan akan
dipantulkan sepenuhnya ke receiver.
3) Diffuse
Transmitter dan receiver ditempatkan secara bersamaan dan
menggunakan cahaya yang dipantulkan langsung dari objek untuk
melakukan deteksi. Pemilihan photosensor jenis ini harus
mempertimbangkan warna dan tipe permukaan obyek (kasar, licin,
buram, terang). Dengan permukaan buram, jarak sensing akan sangat
dipengaruhi oleh warna obyek. Warna-warna terang berpengaruh
terhadap jarak sensing maksimum dan warna gelap berpengaruh terhadap
jarak sensing minimum.

18
Gambar 2.14 Photoelectric sensor
Logika Tangga/Ladder Diagram
Ladder diagram atau logika tangga adalah sebuah bahasa
pemrograman yang dipakai untuk menggambarkan sebuah sistem yang
digambarkan dengan grafis diagram rangkaian elektronika dan perangkat
keras komputer berdasarkan logika, banyak ditemukan pada programmable
logic controller dan kendali industri.
Gambar 2.15 Ladder Diagram

19
METODE PENELITIAN
Tempat dan Waktu Penelitian
Penelitian ini dilakukan mulai dari bulan September sampai dengan Desember
2020. Penelitian dilakukan di rumah peneliti dan Ruang Laboratorium Sinyal dan Sistem
IT PLN Jakarta.
Desain Penelitian
Pada penelitian ini dibutuhkan diagram alir atau flowchart yang digunakan untuk
mengetahui Langkah-langkah yang perlu dilakukan untuk menyelesaikan penelitian.
Diagram alir atau flowchart digambarkan pada gambar berikut :
Gambar 3.1 Diagram Alir
Mulai
Studi Pustaka
Perancangan Prototipe
Perakitan Prototipe
Pengujian Motor DC
Pengujian Sensor
Pengujian Limit Switch
Pengujian Jaringan WiFi
Pengujian Aplikasi Android
A
A
Perancangan Ladder Diagram
Pengujian Prototipe, berhasil?
Pembuatan Laporan Penelitian
Selesai
Ya
Tidak

20
Penjelasan diagram alir atau flowchart penelitian :
1. Mulai
Pada proses ini penulis memulai persiapan untuk mengerjakan penelitian
dan pembuatan prototipe Kendali Jarak Jauh Gerbang Otomatis Berbasis Android
dan PLC.
2. Studi Pustaka
Pada tahap ini dilakukan pengumpulan data-data dan informasi yang
diberkaitan dan akan membantu selama proses penelitian berjalan. Pengumpulan
data-data dilakukan melalui media internet.
3. Perancangan Prototipe
Pada tahap ini penulis memulai perancangan konsep untuk prototipe
Kendali Jarak Jauh Gerbang Otomatis Berbasis Android dan PLC.
4. Perakitan Prototipe
Proses ini merupakan proses utama dari penelitian ini yang berupa
penyesuain komponen perangkat keras dengan tahapan perancangan alat.
Pembuatan alat dilakukan secara berurutan dari perancagan alat, pemasangan
perangkat keras atau modul, pengkabelan dan pembuatan miniature prototipe
Kendali Jarak Jauh Gerbang Otomatis Berbasis Android dan PLC.
5. Pengujian Motor DC
Pada proses ini penulis melakukan pengujian pada komponen motor DC
apakah dapat bekerja secara CC dan CCW, untuk dapat bekerja secara CC dan
CCW Penulis memberikan driver pada motor DC.
6. Pengujian Sensor
Pada tahap ini penulisan melakukan pengujian pada sensor fotoelektrik
untuk dapat mendeteksi benda, serta memberi sinyal kepada android jika terdapat
benda didekatnya.

21
7. Pengujian Limit Switch
Proses ini merupakan pengujian terhadapat fungsi limit switch yang dapat
berubah kondisi dari NC menjadi NO atau sebaliknya pada rangkain. Penggunaan
limit switch akan berpengaruh pada jalannya motor DC.
8. Pengujian Jaringan WiFi
Jaringan WiFi digunakan sebagai media penghubung antara PLC dengan
android agar dapat melakukan pengendalian jarak jauh. Pengujian ini bertujuan
untuk memastikan bahwa jaringan WiFi berkerja dengan baik.
9. Pengujian Aplikasi Android
Pengujian aplikasi pada android ini untuk memastikan bahwa aplikasi
berjalan dan terkoneksi dengan PLC.
10. Perancangan Ladder Diagaram
Pada tahap ini merupakan tahap pembuatan ladder diagram yang nantinya
akan dimasukan pada prototipe Kendali Jarak Jauh Gerbang Otomatis Berbasis
Android dan PLC yang telah selesai dibuat.
11. Pengujian Prototipe
Pada tahap ini dilakukan pengujian secara keseluruhan dari komponen-
komponen hardware dan software pada prototipe.
12. Pembuatan Laporan Penelitian
Setelah pengujian prototipe berhasil dan kendali jarak jauh berjalan
dengan lancer, maka data dan informasi yang didapatkan dari pembuatan
prototipe dikumpulkan menajdi laporan penelitian.
13. Selesai
Pada tahap ini penulis telah menyelesaikan tugas akhir baik dalam
pembuatan alat, pengujian alat serta perbaikan alat. Selanjutnya alat ini sudah
dapat digunakan dengan baik.

22
Metode Pengumpulan Data
Dalam rangka menyelesaikan penelitian dan menghasilkan karya yang sangat
sesuai dengan teori-teori ilmiah yang sudah dan dapat digunakan secara efisien, maka
dalam penyusunan ini ada penulis memeliki diterapkan, antara lain :
Observasi
Melalui observasi penulis dapat mengetahui proses pengerjaan suatu
bahan dan peralatan yang digunakan untuk menghasilkan sebuah sistem
kendali otomatis pada pintu gerbang. Secara langsung dari proses observasi ini
penulis dapat mengambil data yang diperlukan.
Studi Literatur
Mengumpulkan data dengan mencatat atau membaca dari jurnal-jurnal
penelitian yang ada dan memeliki pokok permasalahan yang sama dengan
penelitian ini. Sedikit banyak informasi penulis dapatkan dari situs-situs yang
di internet dan jurnal-jurnal penelitian.
Wawancara
Melakukan proses tanya jawab kepada narasumber yang memahami
permasalahan yang akan diselesaikan penulis melalui penelitian ini, secara
langsung dari proses tanya jawab ini penulis dapat memahami permasalahan
yang akan diselesaikan.
Metode Analisis Data
1. Analisis Sensor
Penelitian ini memanfaatkan sensor fotoelektrik sebagai pemberi sinyal
jika ada suatu benda yang berada di dekat gerbang otomatis, Ketika sinyal
terkonfirmasi maka akan memberikan tanda kepada pengendali yaitu telepon
pintar android. Analisis dilakukan pada sensor untuk mengetahui keakuratan
sensor dalam pengaplikasian untuk mendeteksi sebuah benda.

23
2. Analisis Gangguan Sistem
Pada penelitian ini diharapkan tidak terjadi gangguan pada sistem maka
dilakukan analsisi perbagian dari sistem mulai dari sensor, motor dc, WiFi, hingga
alat pengendali yaitu telepon pintar android.
3. Analisis Kendali Otomatis
Penelitian ini menggunakan media jaringan WiFi sebagai media
pengiriman data untuk melakukan kendali otomatis pada gerbang, pada kondisi
tertentu konektifitas dari jaringan tersebut bisa terputus maka dari itu penulis
menganalisa dan mengobservasi konektifitas jaringan WiFi agar meminimalisir
terjadinya gagal jaringan pada sistem kendali otomatis.

24
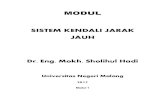
Blok Diagram Kendali Jarak Jauh
Gambar 3.2 Blok Diagram Kendali Jarak Jauh
Programmable Logic
Controller
Modul Wifi
Limit Switch
Sensor E3F-
DS30P1
Perangkat
Android
Modul Relay
Power Supply
24v
Motor CW
Motor CCW
Masukan Proses Keluaran

25
Spesifikasi Komponen
Pada penelitian ini menggunakan beberapa komponen yang digunakan untuk
membangun sebuah prototipe gerbang otomatis, seperti PLC, power supply, limit switch,
sensor proximity, motor DC, modul relay, dan modul wifi. Komponen tersebut memiliki
spesifikasi seperti pada tabel 3.1
Tabel 3.1 Spesifikasi Komponen
Komponen Tipe Spesifikasi
Programmable Logic Controller FX3U
- Input Power 24v - Output Power 24v -Tegangan Kerja 24v - 8 Port Digital Input - 6 Port Digital Output - 2 Port Analog Output - 6 Port Analog Input
Limit Switch Roller Lever - Input Power 24v
Modul Wifi
- Input Power 5v (USB Port)
- 3 Port Input - 3 Port Output
Modul Relay 2 Channel Optical Isolated Relay Module
- Tegangan Kerja 5v - Input Power 5v - 2 Channel Output - Maximum Output 30v
Motor DC Brushed - Tegangan Kerja 3-12v
Sensor Proximity E3F-DS30P1 - Input Power 6-36v - Transistor PNP
Power Supply DC Power Supply - 24v Output - 4 Port Output 24v

26
Jadwal Penelitian
Tabel 3.2 Tabel Jadwal Penelitian
No. Kegiantan September Oktober November Desember Januari
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1. Menentukan Judul
Penelitian
2. Penyusunan Proposal
Skripsi
4. Pengajuan Proposal
Skripsi
4. Sidang Proposal Skripsi
5. Pembuatan Alat Penelitian
6. Pengujian Alat Penelitian
7. Penyusunan Laporan
Tugas Akhir

27
HASIL DAN PEMBAHASAN
Dalam penulisan sub bab ini penulis akan menjelaskan tentang hasil pengujian
pada komponen utama prototipe serta langkah-langkah yang harus dilakukan untuk
menjalankan pengujian pada komponen tersebut. Pengujian komponen dilakukan untuk
mempermudah penulis dalam menemukan kesalahan atau error yang terdapat pada alat
yang dirakit sekaligus mempermudah penulis untuk melakukan analisis.
Prototipe Gerbang
Prototipe gerbang otomatis merupakan bagian utama pada penelitian ini karena
prototipe gerbang otomatis tersebut akan menjadi tempat dimana semua komponen-
komponen akan bekerja dan kendali otomatis akan diuji. Prototipe gerbang otomatis
dibagi menjadi 2 bagian, yang dimana bagian pertama adalah bagian utama yang
bergerak yaitu gerbang geser yang akan digerakan oleh motor DC dan bagian kedua
adalah bagian penompang dari gerbang geser tersebut seperti tiang. Prototipe
gerbang otomatis ini terbuat dari bahan dasar akrilik yang memiliki tebal 3mm,
gerbang berukuran 1:10 dari ukuran gerbang aslinya. Detail ukuran gerbang dapat
dilihat pada gambar 4.1 dan prototipe gerbang dapat dilihat pada gambar 4.2:
Gambar 4.1 Detail Ukuran Gerbang

28
Gambar 4.2 Prototipe Gerbang Tampak Depan
Gambar 4.3 Prototipe Gerbang Tampak Belakang
Pengujian Sensor Photoelektrik E3F-DS30P1
Pengujian sensor E3F-DS30P1 ini dilakukan untuk mengetahui sensor bekerja
dengan baik sekaligus, serta menguji sensor E3F-DS30P1 sebagai pendeteksi obyek
yang berada di dalam atau di luar gerbang sekaligus menjadi input yang diperlukan
PLC untuk menjalakan sistem kendali jarak jauh pada gerbang otomatis.
Pengujian ini dilakukan dengan cara menaruh benda di dekat sensor photoelektrik
dan mengamati lampu indikator pada PLC yang memberikan tanda bahwa sinyal
input sudah masuk dan melakukan perintah selanjutanya. Sensor E3F-DS30P1
memiliki fitur distance adjustable yang dimana sensor dapat mengatur nominal
range atau jarak maksimum yang dapat di deteksi oleh sensor, menurut data sheet
sensor E3F-DS30P1 memiliki kemampuan mendeteksi hingga ± 30cm. Dalam
pengujian ini dilakukan uji coba sebanyak 10 kali untuk mendapatkan 10 sempel data
Tri Wahyu Oktaviana Putri, ST., MT
Update gambar dg yg udah komplit rangkaian dan sensor2nya ya

29
jarak yang dapat di deteksi oleh sensor E3F-DS30P1, pengujian dilakukan dengan
rentan jarak 3cm sampai 30cm.
Peralatan yang digunakan dalam pengujian sensor E3F-DS30P1 adalah, sensor
E3F-DS30P1, PLC FX3U, power supply 24V, objek pengujian. Peralatan tersebut
akan dirangkai seperti pada gambar 4. :
Gambar 4.4 Rangkaian Pengujian Sensor E3F-DS30P1
Sensor E3F-DS30P1 memanfaatkan cahaya inflamerah yang dipantulkan
langsung oleh objek untuk melakukan pendeteksian.
Tabel 4.1 Hasil Pengujian Sensor E3F-DS30P1
Jarak(cm) Hasil
3 cm Terdeteksi
6 cm Terdeteksi
9 cm Terdeteksi
12 cm Terdeteksi
15 cm Terdeteksi
18 cm Terdeteksi

30
21 cm Terdeteksi
24 cm Terdeteksi
27 cm Terdeteksi
30 cm Terdeteksi
33 cm Tidak Terdeteksi
36 cm Tidak Terdeteksi
Berdasarkan pengujian sensor diatas didapatkan data bahwa sensor dapat
mendeteksi benda dengan jarak terdekat hingga terjauh sampai 30cm dan sensor dapat
dijadikan input pada PLC FX3U dengan tegangan keluaran sensor sebesar 24 VDC.
Pengujian Motor DC
Pengujian ini dilakukan untuk mengetahui perputaran motor DC secara clock
wise (CW) dan counter clock wise (CCW) dengan bantuan modul relay 2 channel.
Pengujian ini dilakukan dengan melakukan pengiriman perintah dengan cara
menekan push button buka atau tutup pada aplikasi android dan mengamati
pergerakan prototipe gerbang otomatis.
Peralatan yang digunakan dalam pengujian motor DC ini adalah, motor DC,
modul relay 2 channel, power supply 24v, sensor E3F-DS30P1, dan PLC FX3U.
Paralatan tersebut akan dirangkai seperti gambar 4.3 :
Gambar 4.5 Rangkaian Pengujian Motor DC

31
Dalam pengujian ini terdapat 2 pin output dari PLC yang mengarah ke modul
relay yang berfungsi sebagai pengatur tegangan yang masuk ke motor DC sehingga
motor DC dapat bekerja secara CW maupun CCW. Pada saat motor DC bergerak
secara CW maka motor DC berfungsi sebagai penggerak untuk membuka gerbang
otomatis dan CCW berfungsi bergerak sebagai penutup gerbang otomatis.
Hasil dari pengujian motor DC ini adalah motor DC dapat menggerakan gerbang
otomatis untuk membuka dan menutup gerbang, ketika motor DC bergerak secara
CW terdapat output dari Y2 yang diman berfungsi untuk membuka gerbang dan
bergerak CCW ketika mendapat output Y5 untuk menutup gerbang.
Pengujian Limit Switch
Pengujian ini dilakukan untuk memastikan limit switch berfungsi sebagai saklar
pembatas pada putaran motor DC pada saat menutup prototipe gerbang dan
membuka prototipe gerbang, limit switch juga digunakan sebagai input untuk
perintah reset pada PLC. Pengujian ini dilakukan dengan cara menekan limit switch
pada saat motor DC bekerja dan meperhatikan lampu indikator input/output pada plc.
Pada pengujian limit switch membutuhkan alat seperti PLC FX3U, power supply
24V, motor DC, sensor E3F-DS30P1, modul relay dan limit switch. Limit switch akan
dirangkai sesuai dengan rangkaian pada gambar 4.6 :
Gambar 4.6 Rangkaian Limit Switch

32
Hasil dari pengujian ini ketika PLC menerima input dari sensor 1 maka PLC akan
memberikan tegangan pada Y2 yang dimana sebagai pin output dari PLC, ketika Y2
berlogika 1 maka motor DC akan bergerak secara CW atau membuka gerbang
otomatis, ketika motor DC menggerakan gerbang dan gerbang menyentuh limit
switch maka motor DC akan berhenti bergerak.
Pengujian Jarak Konektifitas Wifi
Konektifitas wifi merupakan kunci utama untuk menjalankan prototipe kendali
gerbang otomatis ini. Tujuan pengujian ini adalah untuk mengetahui seberapa jauh
kendali otomatis dapat dikendalikan oleh perangkat android dengan koneksi wifi
yang terhubung pada PLC dan android. Konektifitas wifi PLC dengan android
dibantu oleh modul wifi yang terhubung pada PLC, sehinga android dapat
memberikan perintah yang berupa inputan pada PLC. Berdasarkan pengukuran yang
telah dilakukan jarak maksimum pengendalian gerbang otomatis adalah sejauh 20m,
pengujian dilakukan dari dalam rumah hingga luar rumah.
Pada pengujian konektifitas wifi membutuhkan PLC FX3U, power supply 24v,
motor DC, sensor E3F-DS30P1, modul relay, limit switch dan modul wifi. Berikut
rangkaian pengujian konektifitas wifi :
Gambar 4.7 Pengujian Konektifitas Wifi

33
Berikut merupakan tabel hasil pengukuran jarak kendali otomatis menggunakan
koneksi wifi.
Tabel 4.2 Pengukuran Jarak Konektifitas
Jarak (meter) Konektifitas Kecepatan Respon
4 m Terhubung Kurang dari 1 detik
8 m Terhubung Kurang dari 1 detik
12 m Terhubung Kurang dari 1 detik
16 m Terhubung Kurang dari 1 detik
20 m Terhubung Kurang dari 5 detik
24 m Tidak Terhubung -
Pada pengujian ini konektifitas wifi yang digunakan berasal dari Mobile Hotspot
yang kualitas jaringannya tidak terlalu bagus yang mengakibatkan konektifitas wifi
tidak terlalu jauh serta keceptan koneksi tidak lebih dari 300kb/s sehingga mengalami
perlambatan dalam mengirim perintah dari perangkat android.
Pengujian Aplikasi Android
Pengujian ini dilakukan untuk memastikan prototipe gerbang otomatis dapat
dilakukan dengan menggunakan perangkat android yang terkoneksi wifi, aplikasi
android ini juga menjadi kunci utama untuk menjalankan kendali otomatis pada
prototipe gerbang. Pengujian dilakukan dengan melakukan pengiriman perintah
dengan cara menekan push button pada aplikasi android.

34
Gambar 4.8 Pengiriman Perintah pada PLC
Aplikasi android yang digunakan pada sistem kendali otomatis prototipe gerbang
otomatis ini adalah aplikasi Blynk.
Pembuatan Ladder Diagram
Pembuatan ladder diagram bertujuan untuk memberikan program pada PLC
sekaligus menggambarkan sistem kendali otomatis secara grafis rangkaian perangkat
elektronika yang digunakan pada sistem kendali jarak jauh prototipe gerbang
otomatis. Pembuatan ladder diagram menggunakan software dari Melsoft Developer
yaitu GX Developer, GX Developer merupakan software pemrograman PLC. PLC
keluaran Mitsubishi elektrik biasanya menggunakan software GX Developer untuk
pemrograman PLCnya.
Pembuatan ladder diagram ini memiliki konfigurasi input dan output yang
terhubung pada PLC dan digunakan pada prototipe gerbang otomatis. Berikut
konfigurasi input dan output yang digunakan pada ladder diagram pada tabel 4.3 :

35
Tabel 4.3 Konfigurasi Input dan Output
Alamat I/O Perangkat Jenis
X000 Input Kendali Buka Input
X001 Input Sensor Luar Input
X002 Input Sensor Dalam Input
X003 Limit Switch 1 Input
X004 Limit Switch 2 Input
X005 Input Power Sistem Input
X006 Input Kendali Tutup Input
M1 Sensor Luar Memory
M2 Sensor Dalam Memory
M3 Power Sistem Memory
M4 Kendali Buka Android Memory
M5 Kendali Tutup Android Memory
Y002 Motor CW Output
Y005 Motor CCW Output
Dari konfigurasi input/output di tabel 4.3 adapula penjelasan atau deskripsi
tentang beroperasinya prototipe gerbang otomatis, prototipe gerbang otomatis ini
memiliki 2 kondisi, yang pertama kondisi ketika mobil masuk ke dalam gerbang dan
yang kedua ketika mobil keluar dari dalam gerbang. Berikut deskripsi dari dua
kondisi tersebut :
Cara kerja prototipe gerbang otomatis, prototipe gerbang otomatis akan bekerja
ketika power sistem aktif (X006 = 1)
1. Kondisi jika mobil dari luar gerbang akan menuju ke dalam gerbang,
maka :
• Sensor luar aktif (X001 = 1)
• Limit Switch 1 aktif (X003 = 1)
• Limit switch 2 aktif (X004 = 1)
• Pengguna mengaktifkan buka gerbang lewat android (X000 = 1)

36
• Maka motor CW akan aktif (Y002 = 1), gerbang terbuka hingga
mencapai limit switch 1 (X003 = 0)
• Limit switch 1 tidak aktif (X003 = 0), maka motor CW akan berhenti
bergerak
• Mobil bergerak masuk ke dalam gerbang hingga sensor dalam aktif
(X002 = 1)
• Sensor luar tidak aktif (X001 = 0)
• Pengguna mengaktifkan tutup gerbang lewat android (X006 = 1)
• Motor CCW akan aktif (Y005 = 1), gerbang tertutup hingga mencapai
limit switch 2 (X004 = 0)
• Limit switch 2 tidak aktif (X004 = 0), maka motor CCW akan berhenti
bergerak
• Gerbang tertutup
2. Kondisi jika mobil dari dalam gerbang akan menuju ke luar gerbang,
maka :
• Sensor dalam aktif (X002 = 1)
• Limit switch 1 aktif (X003 = 1)
• Limit switch 2 aktif (X004 = 1)
• Pengguna mengaktifkan buka gerbang melalui perangkat android
(X001 = 1)
• Maka Motor CW akan aktif (Y002 = 1), gerbang terbuka sampai
mecapai limit switch 1 (X003 = 0)
• Limit switch 1 tidak aktif (X003 = 0), maka motor CW akan berhenti
bergerak
• Mobil bergerak ke luar gerbang hingga luar aktif (X001 = 1)
• Sensor luar tidak aktif (X001 = 0)
• Pengguna mengaktifkan tutup gerbang lewat android (X006 = 1)
• Motor CCW akan aktif (Y005 = 1), gerbang tertutup hingga mencapai
limit switch 2 (X004 = 0)
• Limit switch 2 tidak aktif (X004 = 0), maka motor CCW akan berhenti
bergerak.

37
• Gerbang tertutup
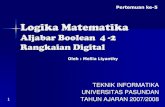
Untuk mempermudah gambaran cara kerja prototipe gerbang otomatis maka
penulis menambahkan ilustrasi prototipe gerbang otomatis sekaligus komponen
input dan output yang digunakan pada prototipe gerbang otomatis tersebut, berikut
gambar ilustrasi :
Gambar 4.9 Ilustrasi Cara Kerja Gerbang
Pada perancagan ini membutuhkan alat seperti komputer/laptop, PLC FX3U,
power supply 24v, dan kabel RS-232. Berikut ini merupakan Langkah-langkah
melakukan perancangan ladder diagram untuk kendali jarak jauh gerbang otomatis
berbasis PLC FX3U sebagai berikut :
1. Membuka software GX Developer
Gambar 4.10 Software GX Developer

38
2. Lalu klik ”new project” dan setting sesuai PLC yang digunakan, pada penelitian
ini menggunakan PLC FX3U.
Gambar 4.11 Setting Project
3. Setelah muncul laman project baru maka sudah dapat dilakukan perancangan
ladder diagram PLC FX3U.
Gambar 4.12 Laman Project
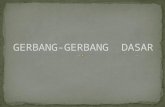
Ladder diagram berisi grafis keseluruhan sistem kendali jarak jauh pada gerbang
otomatis meliputi perangkat input dan output pada PLC FX3U. Berikut adalah
ladder diagram untuk prototipe kendali jarak jauh gerbang otomatis :

39
Gambar 4.13 Ladder Diagram
4.7.1 Pengujian Ladder Diagram
Pengujian Ladder diagram ini merupakan salah satu tahapan akhir
percobaan yang dilakukan untuk mengetahui ladder diagram yang dibuat
dapat tersinkron dengan perangkat keras sudah dibuat. Pengujian dilakukan
dengan cara memberikan input simulasi pada ladder diagram secara virtual
dengan software GX Developer.
Pada pengujian ladder diagram dilakukan pada Berikut hasil pengujian
ladder diagram :

40
Tabel 4.4 Pengujian Ladder Diagram Motor Buka
Input Output
M3 M1 M2 M4 X003 Y005 Y002
1 1 0 1 1 1 1
1 0 1 1 1 1 1
Tabel 4.5 Pengujian Ladder Diagram Motor Tutup
Input Output
M3 M1 M2 M5 X004 Y002 Y005
1 1 0 1 1 1 1
1 0 1 1 1 1 1
Pada tabel 4.4 dan 4.5 dapat dilihat pin output berlogika 1 yang berarti
adanya teganan pada output. Ketika output berlogika 1 maka ketika
aplikasikan dengan prototipe gerbang otomatis maka motor DC akan
bergerak CW/CCW dan dapat untuk membuka dan menutup gerbang
otomatis.
Pengujian Keseluruhan
Dalam proses ini merupakan tahap pengujian final percobaan perangkat lunak dan
perangkat keras yang dilakukan untuk mengetahui apakah perangkat keras dan perangkat
android yang telah dirancang sudah sinkron dengan ladder diagram yang telah dibuat.
Pengujian ini dilakukan secara keseluruhan dari mulai sensor mendetesi objek hingga
gerbang dapat tertutup saat objek sudah masuk/keluar.
1. Perangkat android sudah bisa mengirim mengirim perintah kepada PLC seperti
perintah “Power On/Off”, sekaligus melakukan perintah “Buka” atau “Tutup”
gerbang otomatis.
2. Sensor E3F-DS30P1 dapat mendeteksi objek yang akan masuk/keluar dari
prototipe gerbang sekaligus menjadi input pada PLC untuk menjalankan
perintah selanjutnya.

41
3. Motor DC bisa bergerak secara CW saat diberi perintah “Buka” oleh perangkat
android, begitu juga saat diberi perintah “Tutup” motor DC dapat bergerak
secara CCW.
Secara keseluruhan prototipe gerbang otomatis berbasis PLC dan Android ini
berhasil bekerja secara keseluruhan. Adapun beberapa kelebihan dari kendali jarak jauh
prototipe gerbang otomatis berbasis PLC dan android ini, antara lain :
a. Dengan adanya alat ini, maka dapat mempermudah user/pengguna untuk
membuka dan menutup pintu gerbang dengan memanfaatkan fasilitas
perangkat Android
b. Dari perangkat alat yang dibuat dengan menggunakan PLC yang
digunakan untuk membuka dan menutup pintu gerbang maka
user/pengguna tidak memerlukan banyak operator.
c. Perangkat alat ini menggunakan koneksi wifi yang dimana dapat
digunakan sejauh kurang lebih 20m.
Tabel Kebenaran
Pada pengujian keselurhan ini adapula tabel kebenaran, tabel kebenaran
ini berdasarkan pengujian pada saat kondisi mobil masuk ke dalam gerbang
dan kondisi pada saat mobil keluar gerbang.
Tabel 4.6 Tabel Kebenaran Ketika Mobil Masuk
Input Output Ket.
Output M3 M1 M2 M4 M5 X003 X004 Y005 Y002
1 1 0 1 0 1 0 0 1 CW
(Buka)
1 0 1 0 1 0 1 1 0 CCW
(Tutup)
Pada Tabel 4.6 membuktikan bawah ketika M3 sudah berlogika 1 maka
kendali jarak jauh pada gerbang sudah bisa digunakan, ketika ada mobil ingin
masuk dan terdeteksi oleh sensor 1 maka M1 akan aktif atau berlogika 1,
X003 atau limit switch yang berada dalam kondisi normally close akan aktif

42
atau berlogika 1, jika perangkat android mengirimkan perintah “Buka” maka
M4 akan berlogika 1 dan Y002 akan berlogika 1 sehingga motor akan
bergerak secara clock wise atau membuka gerbang. Ketika mobil sudah
berada di dalam gerbang dan sensor 2 mendeteksi maka M2 akan berlogika 1
dan jika perangkat android mengirimkan perintah “Tutup” maka gerbang
akan tertutup atau Y005 aktif.
Tabel 4.7 Tabel Kebenaran Mobil Keluar
Input Output Ket.
Output M3 M1 M2 M4 M5 X003 X004 Y005 Y002
1 0 1 1 0 1 0 0 1 CW
(Buka)
1 1 0 0 1 0 1 1 0 CCW
(Tutup)
Pada table 4.7 terbukti bahwa ketika power sistem aktif yaitu M3 dan
mobil terdeteksi oleh sensor 2 yaitu M2 maka perangkat android dapat
mengirimkan perintah buka untuk mengkatifkan M4, dengan kondisi
normally close pada limit switch maka Y002 akan aktif dan menggerakan
motor DC untuk membuka gerbang, motor DC bergerak secara clock wise.
Pada saat mobil sudah keluar dari gerbang dan terdeteksi oleh sensor 1 maka
M1 akan aktif dan perangkat android dapat mengirimkan perintah “Tutup”
untuk menutup gerbang.

43
PENUTUP
Kesimpulan
Berdasarkan hasil penelitian dan Analisa yang dilakukan terhadap kendali jarak
jauh prototipe gerbang otomatis berbasis android dan PLC, dapat ditarik kesimpulan
sebagai berikut :
1. Prototipe telah berhasil dirancang dengan gabungan dari Programmable Logic
Controller sebagai pengedali pusat, Android sebagai input perintah, Wifi sebagai
media komunikasi , Motor DC sebagai penggerak gerbang, dan Sensor Proximity
sebagai pendeteksi objek.
2. Jarak maksimum transmisi kendali jarak jauh menggunakan Android dengan
media komunikasi wifi yang terukur tanpa adanya halangan di ruang terbuka dapat
terkoneksi sejauh 20 meter dengan waktu eksekusi kurang dari 1 detik.
3. Sensor E3F-DP30P1 untuk melakukan pendeteksian kurang lebih 30cm, sensor
E3F-DP30P1 dapat melakukan deteksi pada benda padat yang memiliki permukaan
rata ataupun tidak rata tetapi sensor E3F-DP30P1 tidak dapat melakukan
pendeteksian kepada benda cair.
Saran
Dari hasil perancangan alat yang telah terealisaiskan tentunya masih terdapat
beberapa kekurangan, untuk itu diperlukan pengembangan pada rancangan selanjutnya.
Berikut merupakan beberapa saran yang menjadi acuan untuk dapat dikembangkan,
antara lain :
1. Merealisasikan prototipe dengan ukuran model pintu gerbang yang sebenarnya.
2. Mengubah segi tampilan antarmuka aplikasi Blynk sehingga terlihat lebih
menarik untuk digunakan oleh user/pengguna.
3. Melakukan penambahan fitur buka sebagian pada kendali jarak jauh prototipe
pintu gerbang otomatis

DAFTAR PUSTAKA
Dyto, N. N. (2012). RANCANG BANGUN PROTOTIPE SISTEM AKTUATOR
MENGGUNAKAN BRUSHED DC MOTOR DENGAN PENGENDALIAN
FUZZY. Jurnal Teknik Elektro Universitas Indonesia.
Fitri, F., & Setiawan, Y. (2015). Rancang Bangun Buka Tutup Pintu Pagar Rumah
Menggunakan Remote Control Wireless Rf315. Jurnal Sisfokom (Sistem Informasi
Dan Komputer), 4(2), 49. https://doi.org/10.32736/sisfokom.v4i2.197
Masrukhan, M. N., Mulyo, M. P., Ajiatmo, D., & Ali, M. (2016). Optimasi Kecepatan
Motor DC Menggunakan PID dengan Tuning Ant Colony Optimization (ACO)
Controller. Prosiding SENTIA-2016, 8(1), B49–B52.
Noferiawan, R. (2018). PROTOTIPE SISTEM OTOMASI PINTU GERBANG
MENGGUNAKAN PERANGKAT KOMUNIKASI BLUETOOTH BERBASIS
MIKROKONTROLER ARDUINO. Interciencia, 489(20), 313–335.
Rizki, M. (2018). Perancangan Sistem Pengendali Pintu Pagar Otomatis Menggunakan
Android Speech Recognition Berbasis Arduino. 1–61.
Satyaputra, A., & Aritonang, E. M. (2014). Beginning Android Programming with ADT
Bundle. Elex Media Komputindo.
SensorHaus.id. (2018). Photoelectric Sensor. Sensorhaus.Id.
https://www.sensorhaus.id/article?view=article&id=66&catid=13
TeknikElektronika.com. (2018). Pengertian Proximity Sensor. Teknikelektronika.Com.
https://teknikelektronika.com/pengertian-proximity-sensor-sensor-jarak-jenis-jenis-
sensor-proximity/
Triawati, E., & Aritonang, F. (2012). Perancangan Smart Home Berbasis Programmable
Logic Controller. 1–7.
Usman, U., Abdul Azis Rahmansyah, A., & Fajri Apriadi, N. (2017). Rancang Bangun
Pagar Otomatis dengan Finger Print Berbasis Mikrokontroller. JTT (Jurnal
Teknologi Terapan), 3(1), 35–40. https://doi.org/10.31884/jtt.v3i1.3
Yulianto, N., & Bacharuddin, F. (2016). Perancangan Sistem Informasi Parkir dengan
WiFi Berbasis Arduino. Lontar Komputer : Jurnal Ilmiah Teknologi Informasi, 7(3),
132. https://doi.org/10.24843/lkjiti.2016.v07.i03.p01

DAFTAR RIWAYAT HIDUP
a. Data Personal
NIM : 2016-11-269
Nama : Qudrat Hakim
Tempat/Tgl Lahir : Bekasi, 20 Maret 1998
Jenis Kelamin : Laki-Laki
Agama : Islam
Status Perkawinan : Belum menikah
Program Studi : S1
Alamat Rumah : Perumahan Alamanda Regency Blok K16 N0.46
Telepon : 0896-5343-3069
Email : [email protected]
PENDIDIKAN
Jenjang Nama Lembaga Jurusan Tahun Lulus
SD SDN Karang Satria 03 - 2010
SMP SMP Negri 11 Bekasi - 2013
SMA/K SMK Telekomunikasi
Telesandi Bekasi
Teknik Komputer
Jaringan
2016
Jakarta, 19 November 2020
Mahasiswa
(Qudrat Hakim)

INSTITUT TEKNOLOGI PLN
LEMBAR BIMBINGAN PROYEK AKHIR SKRIPSI
Nama Mahasiswa : Qudrat Hakim
NIM : 2016 – 11 – 269
Program Studi : S1 Teknik Elektro
Jenjang : Sarjana
Pembimbing Utama : Tri Wahyu Oktaviana Putri, S.T., M.T.
Judul Tugas Akhir : RANCANG BANGUN KENDALI JARAK JAUH
GERBANG OTOMATIS BERBASIS ANDROID DAN
PROGRAMMABLE LOGIC CONTROLLER
No.
Tgl.
Materi Bimbingan
Paraf
Pembimbing
1. 07-10-20 Pengajuan judul skripsi.
2. 07-10-20 Menjelaskan skripsi yang akan di buat setelah
mengganti judul.
3. 18-11-20 Bimbingan pertama proposal skripsi.
Tri Wahyu Oktaviana Putri, ST., MT
Digitally signed by Tri Wahyu Oktaviana Putri, ST., MTDN: cn=Tri Wahyu Oktaviana Putri, ST., MT gn=Tri Wahyu Oktaviana Putri, ST., MT c=ID Indonesia l=IDIndonesia o=FKET ou=ITPLN [email protected]: I am approving this documentLocation: Date: 2021-02-04 06:12+07:00

4. 20-11-20 Revisi 1, 2, dan 3 hingga acc proposal skripsi
oleh dosen pembimbing.
5. 15-12-20 Bimbingan detail ukuran prototipe kepada dosen
pembimbing.
6. 17-12-20 Bimbingan mengenai uji coba motor DC kepada
dosen pembimbing.
7. 18-12-20 Bimbingan mengenai uji coba motor driver
untuk motor DC kepada dosen pembimbing
8. 21-12-20 Bimbingan mengenai uji coba sensor proximity
E3F-DS30P1.
9. 29-12-2020
Bimbingan sekaligus monitoring progress alat
penelitian oleh pembimbing via Microsoft
Teams.
10. 17-01-21 Bimbingan skripsi BAB 4 dan BAB 5 oleh dosen
pembimbing.
11. 20-01-21 Bimbingan skrispi dan revisi BAB 4 dan BAB 5
oleh dosen pembimbing.
12. 25-01-21 Selesai Revisi.
Tri Wahyu Oktaviana Putri,ST., MT
Digitally signed by Tri Wahyu Oktaviana Putri, ST., MTDN: cn=Tri Wahyu Oktaviana Putri, ST., MT gn=Tri Wahyu Oktaviana Putri, ST., MT c=ID Indonesia l=ID Indonesia o=FKET ou=IT PLN [email protected]: I am approving this documentLocation: Date: 2021-02-0406:12+07:00
Tri Wahyu Oktaviana Putri, ST., MT
Digitally signed by Tri Wahyu Oktaviana Putri, ST., MTDN: cn=Tri Wahyu Oktaviana Putri, ST., MT gn=Tri Wahyu Oktaviana Putri, ST., MT c=ID Indonesia l=ID Indonesia o=FKET ou=IT PLN [email protected]: I am approving this documentLocation: Date: 2021-02-04 06:13+07:00

INSTITUT TEKNOLOGI PLN
LEMBAR BIMBINGAN PROYEK AKHIR SKRIPSI
Nama Mahasiswa : Qudrat Hakim
NIM : 2016 – 11 – 269
Program Studi : S1 Teknik Elektro
Jenjang : Sarjana
Pembimbing Utama : Meyhart TB Sitorus, S.T., M.Eng.
Judul Tugas Akhir : RANCANG BANGUN KENDALI JARAK JAUH
GERBANG OTOMATIS BERBASIS ANDROID DAN
PROGRAMMABLE LOGIC CONTROLLER
No.
Tgl.
Materi Bimbingan
Paraf
Pembimbing
1. 25-01-21 Pengajuan skripsi.
2. 26-01-21 Penjelasan mengenai penelitian dan skripsi yang
dilakukan
3. 26-01-21 Melakukan tatapn muka daring via Whatsapp,
sekaligus menyerahkan file bimbingan skripsi.
Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:06Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:15Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:24

4. 28-01-21 Revisi penulisan skripsi BAB 1, BAB 2 dan BAB
3 oleh dosen pembimbing.
5. 29-01-21 Bimbingan mengenai prototipe gerbang
otomatis.
6. 01-02-21 Bimbingan mengenai uji coba rangkaian motor
DC pada prototipe.
7. 02-02-21 Bimbingan penulisan skripsi BAB 4.
8. 02-02-21 Revisi penulisan BAB 4 oleh pembimbing.
9. 03-02-21 Bimbingan penulisan skripsi BAB 5.
10. 03-02-21 Revisi isi skripsi pada BAB 5.
11. 03-02-21 Persetujuan isi BAB 4 dan 5 oleh pembimbing.
12. 03-02-21 Selesai revisi.
Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:39Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:48
Meyhart Bangkit SitorusSkripsi2021-02-05 07:47:59Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:08Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:17Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:26Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:37Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:47Meyhart Bangkit SitorusSkripsi2021-02-05 07:48:57

Digitally signed by Tasdik DarmanaDN: C=ID, OU=FKET, O=IT-PLN, CN=Tasdik Darmana, [email protected]: I am the author of this documentLocation: your signing location hereDate: 2021-02-22 13:29:45Foxit Reader Version: 10.0.1
Tasdik Darmana


16 Ferbruari 21
Selasa 23 Februari 21
Aas Wasri HC=ID, OU=FKET, O=IT PLN, CN=Aas Wasri H, [email protected] am approving this documentJakarta2021-02-20 13:11:0110.0.0

Selasa 23 Februari 21