PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS fileuntuk mengetahui perbandingan keakurasian mesin...
34
i ANALISA PENGARUH SUMBU X PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS UNIVERSITAS MUHAMMADIYAH SURAKARTA PUBLIKASI ILMIAH Disusun sebagai salah satu syarat menyelesaikan Program Studi Strata I pada Jurusan Teknik Mesin Fakultas Teknik oleh: GESIT PRABOWO NIM : D 200.10.0091 PROGRAM STUDI TEKNIK MESIN FAKULTAS TEKNIK UNIVERSITAS MUHAMMADIYAH SURAKARTA 2016
Transcript of PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS fileuntuk mengetahui perbandingan keakurasian mesin...
i
ANALISA PENGARUH SUMBU X
PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS
UNIVERSITAS MUHAMMADIYAH SURAKARTA
PUBLIKASI ILMIAH
Disusun sebagai salah satu syarat menyelesaikan Program Studi Strata I pada
Jurusan Teknik Mesin
Fakultas Teknik
oleh:
GESIT PRABOWO
NIM : D 200.10.0091
PROGRAM STUDI TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH SURAKARTA
2016
ii
iii
iv
1
ANALISA PENGARUH SUMBU X PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS
GesitPrabowo,BambangWaloyo,AgusDwiAnggono Teknik Mesin Universitas Muhammadiyah Surakarta
JL. A.Yani Tromol Pos 1 Pabelan Surakarta E-mail : [email protected]
ABSTRAKSI
Tujuan penelitian ini adalah untuk mengetahui berapa penyimpangan
terbesar dan terkecil pada mesin CNC ROUTER antara pemrograman manual
dengan pemrograman intregrasi data pada NC CAD/CAM HSMxpress. Dan
untuk mengetahui perbandingan keakurasian mesin CNC ROUTER antara
pemograman manual dengan pemograman intregasi data pada NC CAD/CAM
HSMxpress.
Pada proses pembuatan mesin CNC tahapan selanjutnya melakukan
persiapan bahan dan alat yang akan dipergunakan dalam proses penelitian.
Kemudian mendesain sebuah Mesin CNC dan membuat bagian kontruksi yang
telah ditentukan dengan menggunakan bahan alumunium dan besi. Kemudian
melakukan penyetingan aplikasi dan kalibrasi pada alat, setelah alat disetting
kemudian baru dilakukan pembuatan produk untuk diambil data kemudian
dilakukan analisa data pada mesin CNC.
Pada percobaan permesinan mesin CNC ROUTER, pada hasil
pemrograman manual terdapat penyimpangan terbesar pada bentuk segi enam
sebesar 0,90 mm dan penyimpangan terkecil pada bentuk kotak 0,0053 mm.
Pada hasil intregasi datapada NC CAD/CAM HSMxpress di dapat bahwa hasil
produk juga terdapat penyimpangan yaitu pada segienam sebesar 0,07085195
mm dan terkecil pada bentuk segienam 0,0181659 mm. Tingkat keakurasian
yang didapat dari dalam table dapat disimmpulkan bahwa hasil keakurasian
dimensi dari hasil program HSMxpress lebih akurat dari pada hasil yang didapat
dari program manual.
Kata kunci :CNC, HSMxpress,Kalibrasi, NC CAD/CAM
1
ANALISA PENGARUH SUMBU X PROSES KALIBRASI PADA MESIN CNC ROUTER 3 AXIS
GesitPrabowo,BambangWaloyo,AgusDwiAnggono Teknik Mesin Universitas Muhammadiyah Surakarta
JL. A.Yani Tromol Pos 1 Pabelan Surakarta E-mail : [email protected]
ABSTRAKSI
Tujuan penelitian ini adalah untuk mengetahui berapa penyimpangan
terbesar dan terkecil pada mesin CNC ROUTER antara pemrograman manual
dengan pemrograman intregrasi data pada NC CAD/CAM HSMxpress. Dan
untuk mengetahui perbandingan keakurasian mesin CNC ROUTER antara
pemograman manual dengan pemograman intregasi data pada NC CAD/CAM
HSMxpress.
Pada proses pembuatan mesin CNC tahapan selanjutnya melakukan
persiapan bahan dan alat yang akan dipergunakan dalam proses penelitian.
Kemudian mendesain sebuah Mesin CNC dan membuat bagian kontruksi yang
telah ditentukan dengan menggunakan bahan alumunium dan besi. Kemudian
melakukan penyetingan aplikasi dan kalibrasi pada alat, setelah alat disetting
kemudian baru dilakukan pembuatan produk untuk diambil data kemudian
dilakukan analisa data pada mesin CNC.
Pada percobaan permesinan mesin CNC ROUTER, pada hasil
pemrograman manual terdapat penyimpangan terbesar pada bentuk segi enam
sebesar 0,90 mm dan penyimpangan terkecil pada bentuk kotak 0,0053 mm.
Pada hasil intregasi datapada NC CAD/CAM HSMxpress di dapat bahwa hasil
produk juga terdapat penyimpangan yaitu pada segienam sebesar 0,07085195
mm dan terkecil pada bentuk segienam 0,0181659 mm. Tingkat keakurasian
yang didapat dari dalam table dapat disimmpulkan bahwa hasil keakurasian
dimensi dari hasil program HSMxpress lebih akurat dari pada hasil yang didapat
dari program manual.
Kata kunci :CNC, HSMxpress,Kalibrasi, NC CAD/CAM

2
ANALYSIS INFLUENCE THE X AXIS THE PROCESS CALIBRATION ON A CNC ROUTER 3 AXIS
GesitPrabowo, BambangWaluyo F, ST, MT, AgusDwiAnggono TeknikMesinUniversitasMuhammadiyah Surakarta
Jl. A. YaniTromolPos 1 Pabelan, Surakarta Email :[email protected]
ABSTRACTION
The purpose of this research is to know how the point on a calibration cnc and get to know the minutely machine the cnc at the time of the process of cutting done to products or objects on dimensinya and compares the results of a workpiece before and after machine cnc router axis 3 pass through a process the calibration
In the process of making the next stage of the CNC machines doing the
preparation of materials and tools that will be used in the research process. Then
design a CNC Machine and made part of the construction that has been specified
using aluminum and iron. Then perform the setup of the application and calibration of
equipment, after the tool in setting new product creation is done then to take the data
and then the data analysis done on CNC machines.
Experiment on machining CNC ROUTER, on the results of the programming
manual there is the largest deviation in the form of a hexagon of 0.90 mm and the
smallest deviations in the shape of a box of 0.0053 mm. On the results of intregasi
data on HSMxpress CAD/CAM NC in May that product results there are also
irregularities in Hexagon of 0.07085195 mm and the smallest in the shape of a
hexagon 0.0181659 mm. meticulous Level of in the table can be concluded that the
results of the accuracy of the results of the program HSMxpress is more accurate than
the results that obtained from the program manual.
Keywords: CNC, HSMxpress, Calibration, NC CAD/CAM
3
PENDAHULUAN
1.1 Latar Belakang
Kemajuan sains dan teknologi pada saat ini sudah sedemikian maju, namun
sebagian komponen mesin yang kita perlukan sebagian besar masih impor.
Penggunaan mesin perkakas CNC merupakan upaya untuk memenuhi tuntutan
konsumen yang semakin tinggi, baik dari segi kualitas maupun kuantitas. Era
industrialisasi ini telah meningkatkan kebutuhan dan penggunaan mesin perkakas
CNC seiring dengan permintaan produk-produk komponen mesin yang presisi.
Mesin perkakas CNC dapat memproduksi dan memperbaiki komponen mesin
dengan kualitas yang tergantung pada beberapa faktor, antara lain: kualitas
geometri mesin perkakas CNC, kualitas alat potong, dan keahlian
Operator/Programmer.
Pada proses produksi komponen mesin yang presisi memerlukan tenaga
operator/programmer mesin CNC yang mahir pula. Salah satu kelemahan dalam
mengoperasikan mesin CNC antara lain programmer harus terlebih dahulu
menentukan titik koordinat pada desain komponen mesin yang akan dibuat.
Padahal untuk benda kerja yang berbentuk lekukan atau kontur seorang
Programmer harus menentukan titik koordinat pada setiap pertemuan kontur. Hal
ini memerlukan wakru lama. Mesin perkakas CNC baik Production Unit (PU)
maupun Traning Unit (TU) penggunaannya semakin meningkat terutama untuk
membuat komponen mesin yang berpresisi tinggi maupun untuk keperluan
pendidikan. Guna memenuhi tuntutan industri tersebut diperlukan sumberdaya
manusia (SDM) yang mahir/menguasai dalam bidang tersebut. Dalam hal ini perlu
diadakan suatu penelitian mengenai bagaimana membuat komponen mesin
dengan mesin perkakas CNC yang presisi dalam waktu singkat namun memiliki
tingkat kepresisian tinggi
1.2 TUJUAN PENELITIAN
Tujuan dari penelitian ini adalah :
a. Untuk mengetahui berapa penyimpangan terbesar dan terkecil pada mesin CNC
ROUTER antara pemrograman manual dengan pemrograman intregrasi data
pada NC CAD/CAM HSMxpress.
4
b. Untuk mengetahui perbandingan keakurasian mesin CNC ROUTER antara
pemograman manual dengan pemograman intregasi data pada NC CAD/CAM
HSMxpress.
1.3 BATASAN MASALAH
Berdasarkan latar belakang dan perumusan masalah diatas, penelitian ini
berkonsentrasi pada:
a. Tipe mesin CNC yang dipakai adalah tipe ROUTER 40 X 60 dengan teknologi
High Precision Ball Screw and Square Rails All 3 Axis.
b. Pengaruh pada produk atau objek setelah dilakukan proses kalibrasi pada x axis.
c. Mengetahui pengaruh kalibrasi pada x axis
TINJAUAN PUSTAKA
Roni Permana Saputra1 ( 2011 ) Makalah ini membahas tentang
desain system kendali router berbasis computer numerical control (CNC)
menggunakan personal computer (PC), untuk diimplementasikan di flame
cutting machine (FCM). NC-Code yang diinputkan kekomputer diterjemahkan
menjadi sinyal perintah yang dikirimkan PC ke microcontroller untuk
mengendalikan gerakkan end effector mesin pada sumbu X dan sumbu Y
secara simultan berdasarkan hasil perhitungan interpolasi linier dan interpolasi
sirkular pada PC. Sistem kendali ini diimplementasikan pada FCM dengan
menghubungkan output kendali dari microcontroller dengan driver aktuator
FCM berupa motor DC. Hasil yang diperoleh berupa suatu Prototype System
kendali Router CNC untuk diimplementasikan di FCM dan mampu melakukan
interpolasi linier dan interpolasi sirkular.
Eri Yulius Elvys( 2013 ) Kebutuhan mesin CNC milling 5-axis sangat
meningkat belakangan ini. Peningkatan terjadi disebabkan meningkatnya
kebutuhan untuk mengerjakan bentuk geometri yang komplek dan
mengurangi waktu set-up. Ketidaktelitian yang terjadi pada mesin disebabkan
oleh ketidaktelitian controller, ketidaktelitian konstruksi dan ketidaktelitian
proses pemesinan, atau gabungan dari ketiga ketidaktelitian tersebut.
5
Ketidaktelitian pada konstruksi mesin dapat terjadi selama proses baik pada
desain, manufaktur maupun perakitan. Oleh karena itu, dibutuhkan penelitian
dibidang ini untuk meningkatkan keakurasian dan kepresisian mesin.
Ketidaktelitian dapat diketahui melalui proses kalibrasi pada meja mesin,
dimana alat ukur ditempatkan sesuai arah gerakan linear sumbu X, Y, Z dan
gerakan rotasi sumbu A, C pada meja mesin. Ketidaktelitian gerakan mesin
diperoleh dari pengukuran hasil pemesinan profil aktual. Proses pengujian
gerakan mesin dilakukan dengan variasi DoC 0,5mm, 0,75 mm, 1 mm dan
1,25 mm dengan bentuk lintasan hexagonal membentuk sudut 60̊̊̊̊̊̊̊̊̊̊̊
pada sumbu
C. Disampaing itu feed juga divariasikan dari 75 mm/menit, 100 mm/menit,
125 mm/menit dan 150 mm/menit. Untuk pengujian gerakan mesin pada
sumbu A, DoC 0,5 mm membentuk lintasan sudut 45 dan divariasikan dengan
feed 25 mm/menit, 50 mm/menit, 75mm/menit, 100 mm/menit dan 125
mm/menit. Hasil pengukuran ketidaktelitian ada sumbu A rata-rata
ketidaktelitian -1,2267 sebelum dilakukan kompensasi akan tetapi mengalami
perbaikan dengan rata-rata ketidaktelitian 0̊̊̊̊̊̊̊̊̊̊̊,0̊̊̊̊̊̊̊̊̊̊̊0̊̊̊̊̊̊̊̊̊̊̊3 setelah dilakukan
kompensasi. Hal yang sama juga terjadi pada sumbu C, dimana sebelum
dilakukan kompensasi rata-rata ketidaktelitian -0̊̊̊̊̊̊̊̊̊̊̊,184 dan setelah dilakukan
kompensasi menjadi lebih kecil dengan rata-rata ketidaktelitian 0̊̊̊̊̊̊̊̊̊̊̊,0̊̊̊̊̊̊̊̊̊̊̊0̊̊̊̊̊̊̊̊̊̊̊3 pada
feed 75 mm/menit. Pengujian dengan variasi DoC dan feed pada sumbu ini
juga menunjukan kecenderungan yang sama, dimana rata-rata ketidaktelitian
besar jika menggunakan G-code original, dan rata rata ketidaktelitian menjadi
lebih kecil setelah dilakukan kompensasi dengan menggunakan G-code
modifikasi. Hal ini menunjukan bahwa baik proses kalibrasi konstruksi mesin,
kalibrasi dengan pengaturan jumlah step motor stepper dan kompensasi
ketidaktelitian gerakan meja dapat meningkatkan keakurasian dan kepresisian
pada prototype mesin CNC milling mini 5-axis tipe tilt rotary table.
2.1. LandasanTeori
2.2.1 Pengertian Mesin CNC
Numerical Control / NC (yang berarti "Control Numerik") merupakan sistem
otomatisasi Mesin perkakas yang dioperasikan oleh perintah yang diprogram dan
disimpan dimedia penyimpanan, hal ini berlawanan dengan kebiasaan sebelumnya
dimana mesin perkakas biasanya dikontrol dengan putaran tangan atau otomatisasi
6
sederhana menggunakan CAM. Kata NC sendiri adalah singkatan dalam Bahasa English
dari kata Numerical Control yang artinya Kontrol Numerik. Mesin NC pertama diciptakan
pertama kali pada tahun 40-an dan 50-an, dengan memodifikasi Mesin perkakas biasa.
Dalam hal ini Mesin perkakas biasa ditambahkan dengan motor yang akan menggerakan
pengontrol mengikuti titik-titik yang dimasukan kedalam sistem oleh perekam kertas.
Mesin perpaduan antara servo motor dan mekanis ini segera digantikan dengan sistem
analog dan kemudian komputer digital, menciptakan Mesin perkakas modern yang
disebut Mesin CNC (computer numerical control) yang dikemudian hari telah merevolusi
proses desain. Saat ini mesin mesin-mesin CNC dibangun untuk menjawab tantangan di
dunia manufaktur modern. Dengan mesin CNC, ketelitian suatu produk dapat dijamin
hingga 1/100 mm lebih, pengerjaan produk masal dengan hasil yang sama persis dan
waktu permesinan yang cepat.
Mesin CNC adalah salah satu mesin penunjang kegiatan produksi yang dilakukan
di dunia. Mesin ini berfungsi untuk memproduksi komponen metal dengan ketepatan tinggi.
Sehingga dapat kita jumpai berbagai produk industri logam yang bervariasi yang kita
bayangkan sulit apabila dikerjakan secara manual.
2.2.2 Program CNC
Sebagian besar dari standar kode CNC yang dipakai adalah kode G, G-Code pertama di
buat tahun1950 yang dirancang oleh Massachusetts Institute of Technology di MIT Servo
mechanisms Laboratory. Standar pengkodean CNC di Eropa menggunakan standar ISO
6983, meskipun di Negara-negara lainnya menggunakan standar lainnya, misalnya DIN
66025 atau PN-73M-55256, PN-93/M-55251 di Polandia.
2.2.3 Komunikasi Paralel
Parallel port banyak digunakan dalam berbagai macam aplikasi antar muka.
Port ini membolehkan kita memiliki masukan hingga 8 bit atau keluaran hingga 12 bit
pada saat yang bersamaan, dengan hanya membutuhkan rangkaian eksternal sederhana
untuk melakukan suatu tugas tertentu. Parallel port ini terdiri dari 4 jalur kontrol, 5 jalur
status dan 8 jalur data.
2.2.4 Motor Stepper
7
Motor Stepper adalah perangkat elektro mekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor Stepper bergerak
berdasarkan urutan pulsa yang diberikan. Karena itu, untuk menggerakkan Motor Stepper
diperlukan pengendali Motor Stepper yang membangkitkan pulsa-pulsa periodik.
Penggunaan Motor Stepper memiliki beberapa keunggulan dibandingkan dengan
penggunaan motor DC biasa.
Keunggulannya antara lain :
1. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi.
4. Memiliki respon yang sangat baik terhadap mulai,stop dan berbalik (perputaran).
5. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti
pada motor DC.
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel
langsung keporosnya.
2.2.5 CAD / CAM
CAD atau Computer Aided Design adalah suatu program computer untuk
menggambar suatu produk yang digambarkan oleh garis-garis maupun symbol symbol
yang memiliki makna tertentu.CAD bias berupa gambar 2 dimensi dan gambar 3 dimensi.
CAM (Computer-Aided Manufacturing) adalah proses selanjutnya dibantu computer
setelah computer aided design (CAD). Model yang dihasilkan dalam CAD lalu diverifikasi
untuk dapat dimasukan ke dalam perangkat lunak CAM, yang kemudian mengontrol
mesin
2.2.6 IC L297
IC L297 adalah integrated circuit yang menghasilkan flip-flop untuk
pengendalian Motor Stepper dengan sinyal-sinyal digital pada tiap phasenya. IC ini
sangat ideal untuk mengatur pulsa yang akan dikonversikan ke dalam driver.
2.2.7 IC L298
8
IC L298 adalah IC yang mempunyai tegangan keluaran tinggi dan H-bridge
dengan arus keluaran tinggi. IC L298 logika TTL dan digunakan untuk mengendalikan
beban – beban induktif seperti relay, solenoid, motor DC, dan motorstepper.
2.2.8 Baut
Selain sebagai pengencang, baut memiliki peranan penting bagi kerja suatu
mesin atau alat. Yaitu utuk melakukan perhitungan pergerakan masing-masing sumbu
pada mesin CNC ini diperlukan dasar-dasar perhitungan yang sudah menjadi standar
internasional. Perhitungan ini akan memperkecil ketidak sesuaian (error factor) dari
akurasi maupun komponen mesin.
METODOLOGI PENELITIAN
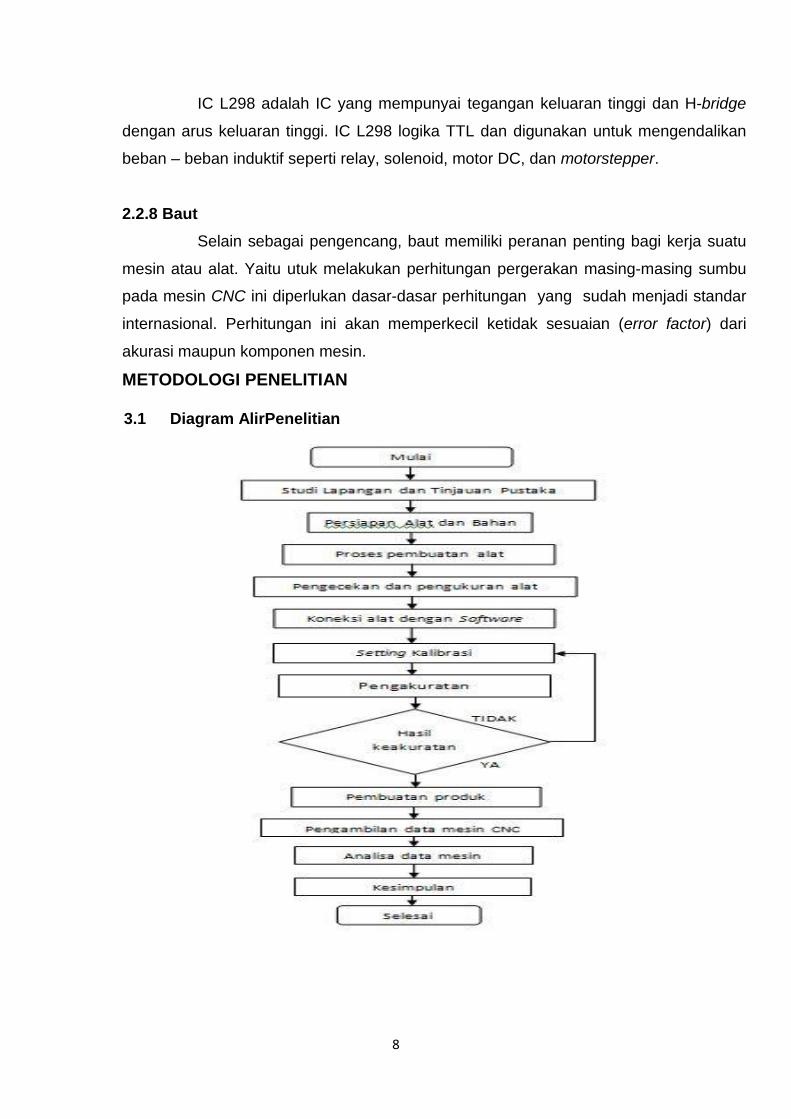
3.1 Diagram AlirPenelitian
9
3.2 Prosedur penelitian
3.2.1 Studi Pustaka
Pada tahap persiapan penelitian yaitu mencari acuan sebagai sumber
dan dasar dalam melakukan penelitian. Pada tahapan selanjutnya melakukan
persiapan bahan dan alat yang akan dipergunakan dalam proses penelitian.
Kemudian mendesain sebuah Mesin CNC dan membuat bagian kontruksi yang
telah ditentukan dengan menggunakan bahan alumunium dan besi. Kemudian
melakukan penyetingan aplikasi dan kalibrasi pada alat, setelah alat di setting
kemudian baru dilakukan pembuatan produk untuk diambil data kemudian
dilakukan analisa data pada mesin CNC.
3.2.2 Studi Lapangan
Pada studi lapangan penulis mencari bahan bahan yang akan
digunakan dalam pembuatan alat CNC tersebut dan mempersiapkan alat bantu
yang dibutuhkan selama penelitan
3.2.3.Persiapan Bahan
Persiapan bahan seperti alumunium, besi siku, baut, Linear Bearing,
Pillow Block, Motor Stepper, kabel dan Ball Screw
3.2.4. Pemilihan Bahan
Pada proses pemilihan bahan alumunium dapat dipilih dengan
menggunakan alumunium dengan bahan plat lembaran diamana kita dapat
memotong bahan sesuai dengan desain yang sudah di gambar. Sedangkan
ukuran yang di tentukan tebal maksimal plat alumunium yang digunakan adalah
1-2 cm untuk mendapatkan kontruksi yang kuat dan tidak berubah pada saat
dilakukan pengujian
Plat alumunium adalah bahan logam berbentukl embaran yang ringan dan kuat
serta mudah dalam proses pengerjaannya dengan ketebalan 0,5 cm-2 cm yang
berjenis untuk AA 1100

10
Gambar 3.2 pemilihan bahan alumunium
Besi siku adalah logam yang keras dan mempunyai bentuk siku 90̊̊̊̊̊̊̊̊̊̊̊ yang
di gunakan dalam pembuatan dudukan alas dan bet mesin cnc
Gambar 3.3 Plat besi siku
Baut/sekrup adalah suatu batang atau tabung dengan alur pada
permukaan nya yang bertujuan untuk menyatukan antara sisi benda yang satu
sama lain di dalam proses pembuatan mesin cnc tersebut
Gambar 3.4.baut
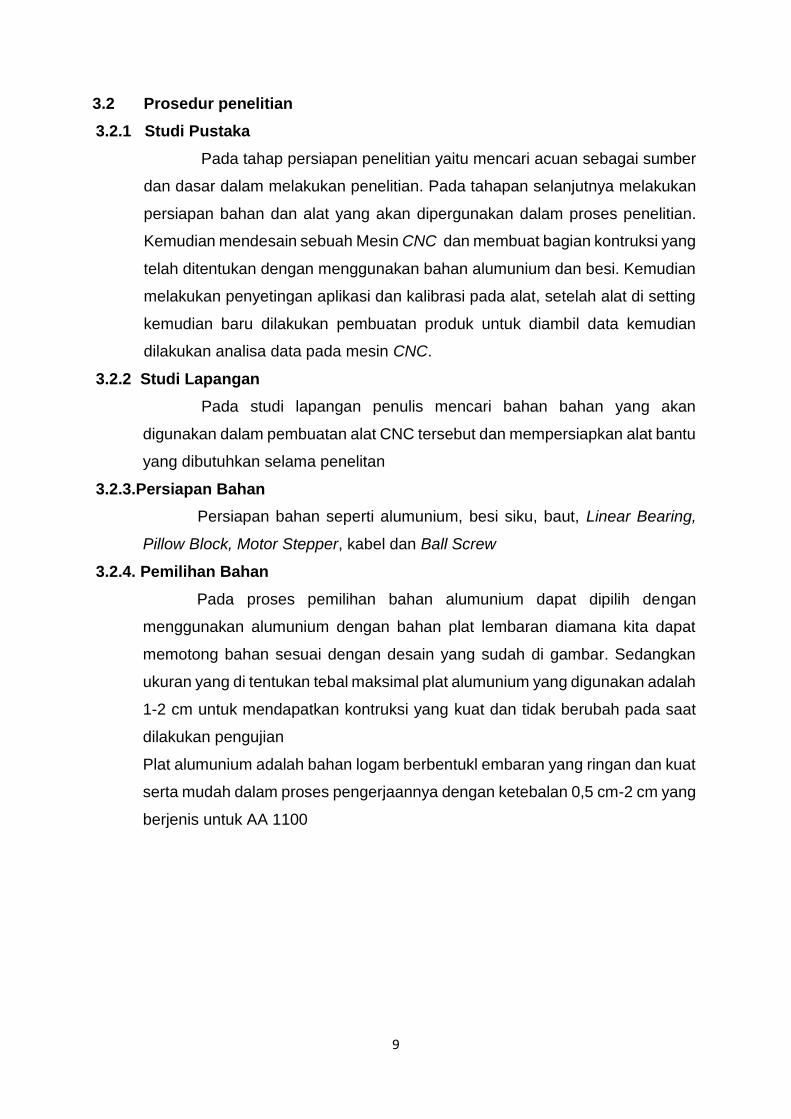
Ball Screw pun menggunakan ulir tetapi ball screw ini diantara nut dan bolt
terdapat ball (gotri) fungsinya untuk mengurangi koefesien gesek
11
Gambar 3.5. Ball Screw
Flexible coupling memiliki dua fungsi utama yaitu meneruskan daya
untuk ditransmisikan dari system sebelum coupling menuju ke system setelah
coupling. Yang kedua sebagai pengaman terhada beban berlebih.
Gambar 3.6. Flexibel Coupling
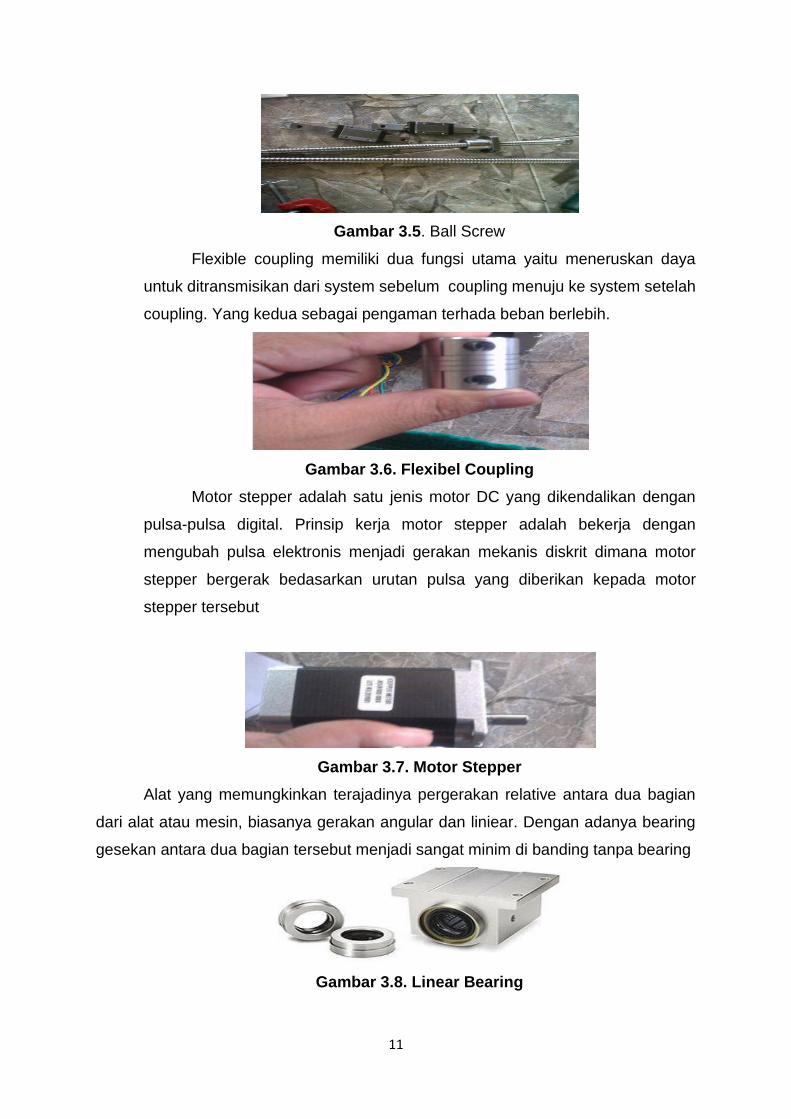
Motor stepper adalah satu jenis motor DC yang dikendalikan dengan
pulsa-pulsa digital. Prinsip kerja motor stepper adalah bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit dimana motor
stepper bergerak bedasarkan urutan pulsa yang diberikan kepada motor
stepper tersebut
Gambar 3.7. Motor Stepper
Alat yang memungkinkan terajadinya pergerakan relative antara dua bagian
dari alat atau mesin, biasanya gerakan angular dan liniear. Dengan adanya bearing
gesekan antara dua bagian tersebut menjadi sangat minim di banding tanpa bearing
Gambar 3.8. Linear Bearing
12
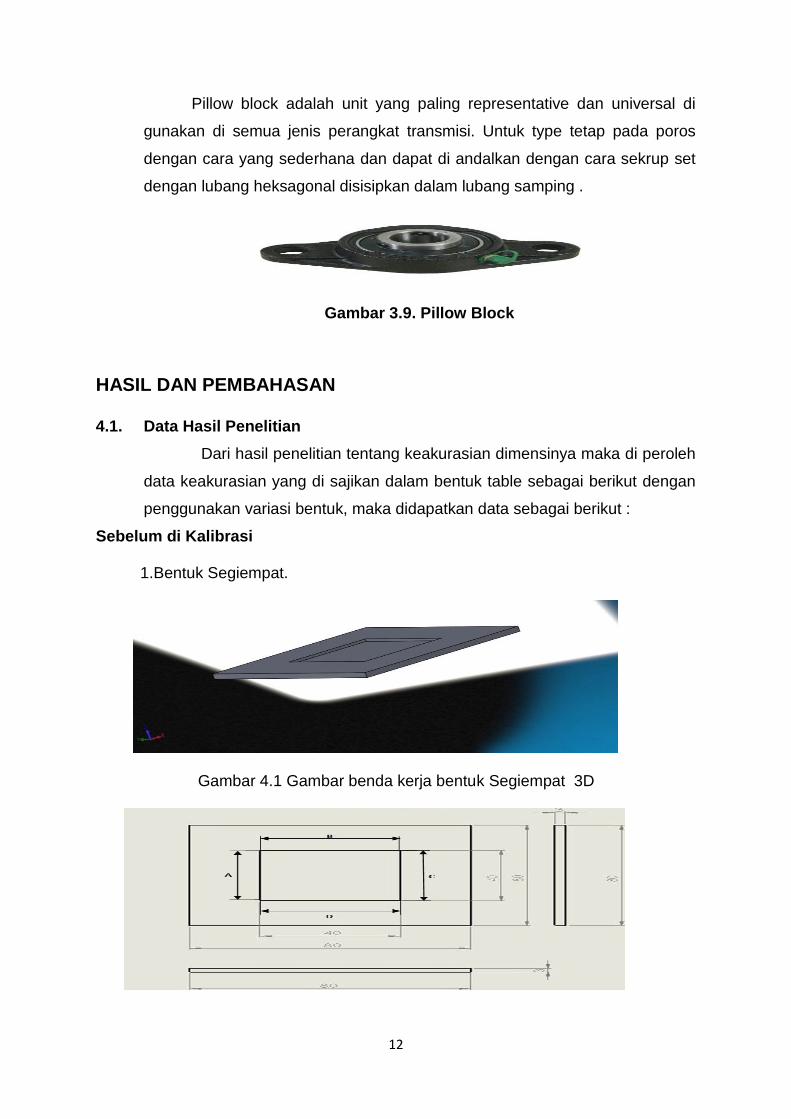
Pillow block adalah unit yang paling representative dan universal di
gunakan di semua jenis perangkat transmisi. Untuk type tetap pada poros
dengan cara yang sederhana dan dapat di andalkan dengan cara sekrup set
dengan lubang heksagonal disisipkan dalam lubang samping .
Gambar 3.9. Pillow Block
HASIL DAN PEMBAHASAN
4.1. Data Hasil Penelitian
Dari hasil penelitian tentang keakurasian dimensinya maka di peroleh
data keakurasian yang di sajikan dalam bentuk table sebagai berikut dengan
penggunakan variasi bentuk, maka didapatkan data sebagai berikut :
Sebelum di Kalibrasi
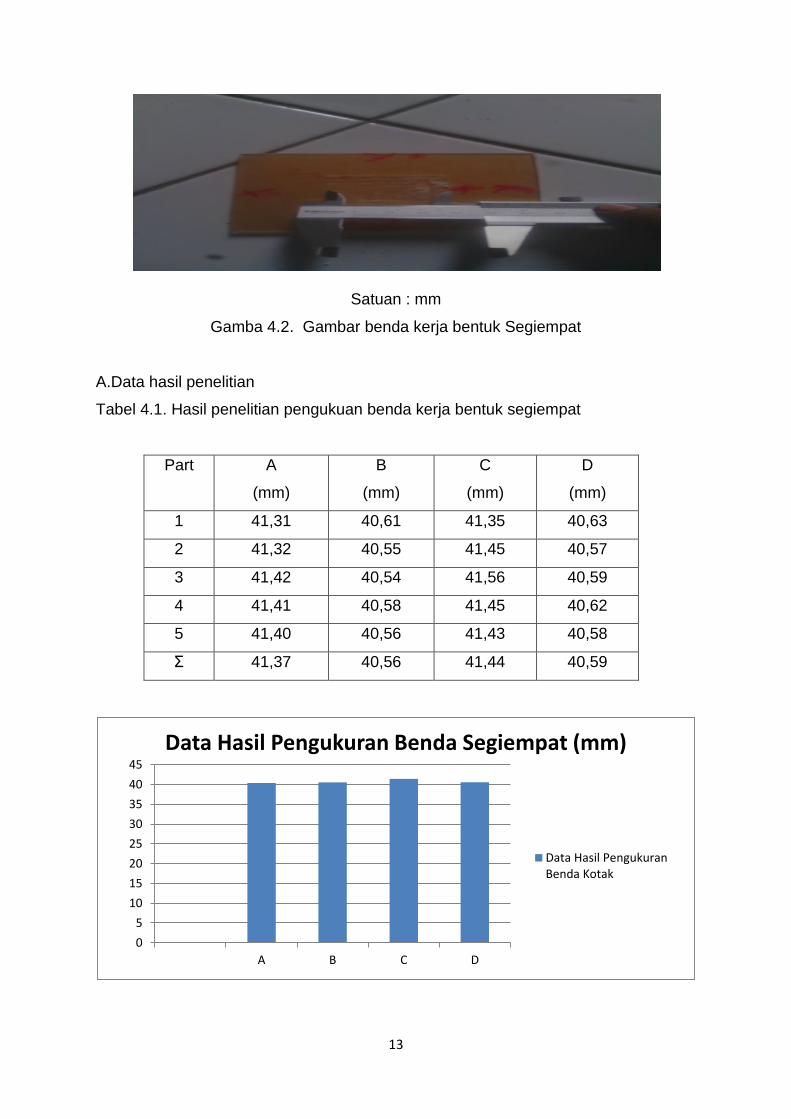
1.Bentuk Segiempat.
Gambar 4.1 Gambar benda kerja bentuk Segiempat 3D
13
Satuan : mm
Gamba 4.2. Gambar benda kerja bentuk Segiempat
A.Data hasil penelitian
Tabel 4.1. Hasil penelitian pengukuan benda kerja bentuk segiempat
Part A
(mm)
B
(mm)
C
(mm)
D
(mm)
1 41,31 40,61 41,35 40,63
2 41,32 40,55 41,45 40,57
3 41,42 40,54 41,56 40,59
4 41,41 40,58 41,45 40,62
5 41,40 40,56 41,43 40,58
Σ 41,37 40,56 41,44 40,59
0
5
10
15
20
25
30
35
40
45
A B C D
Data Hasil Pengukuran Benda Segiempat (mm)
Data Hasil PengukuranBenda Kotak
14
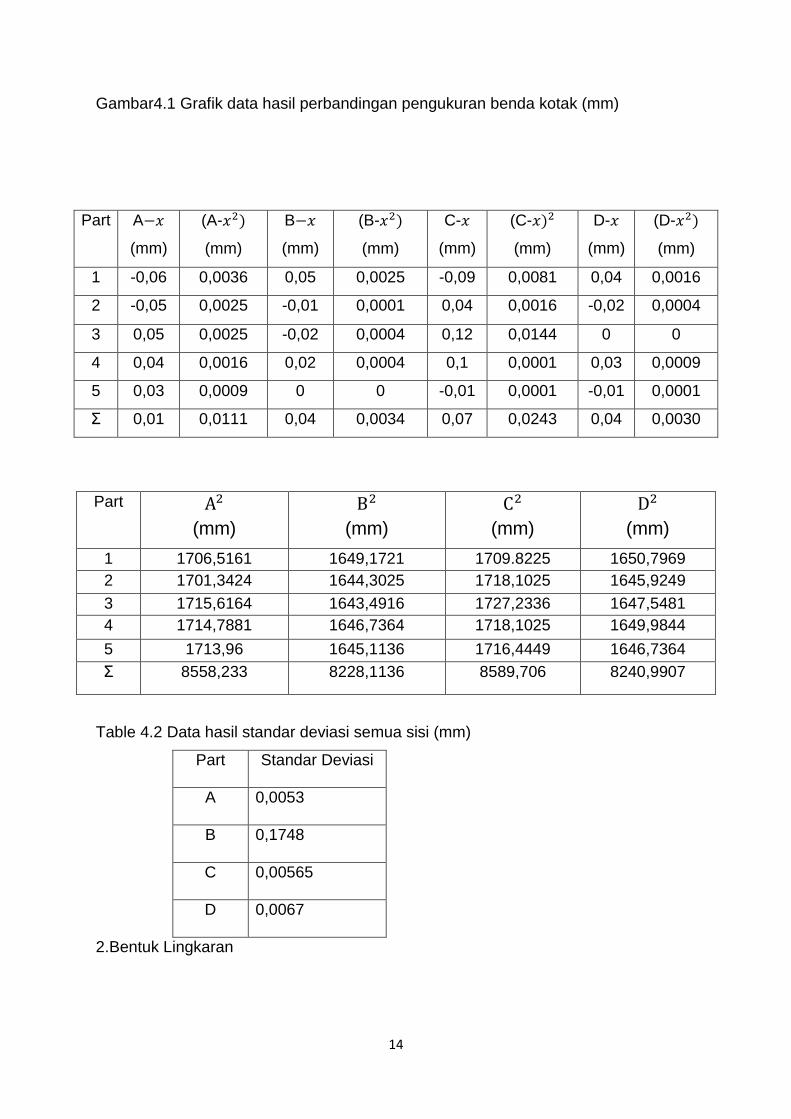
Gambar4.1 Grafik data hasil perbandingan pengukuran benda kotak (mm)
Table 4.2 Data hasil standar deviasi semua sisi (mm)
Part Standar Deviasi
A 0,0053
B 0,1748
C 0,00565
D 0,0067
2.Bentuk Lingkaran
Part A2
(mm)
B2
(mm)
C2
(mm)
D2
(mm)
1 1706,5161 1649,1721 1709.8225 1650,7969
2 1701,3424 1644,3025 1718,1025 1645,9249
3 1715,6164 1643,4916 1727,2336 1647,5481
4 1714,7881 1646,7364 1718,1025 1649,9844
5 1713,96 1645,1136 1716,4449 1646,7364
Σ 8558,233 8228,1136 8589,706 8240,9907
Part A−𝑥
(mm)
(A-𝑥2)
(mm)
B−𝑥
(mm)
(B-𝑥2)
(mm)
C-𝑥
(mm)
(C-𝑥)2
(mm)
D-𝑥
(mm)
(D-𝑥2)
(mm)
1 -0,06 0,0036 0,05 0,0025 -0,09 0,0081 0,04 0,0016
2 -0,05 0,0025 -0,01 0,0001 0,04 0,0016 -0,02 0,0004
3 0,05 0,0025 -0,02 0,0004 0,12 0,0144 0 0
4 0,04 0,0016 0,02 0,0004 0,1 0,0001 0,03 0,0009
5 0,03 0,0009 0 0 -0,01 0,0001 -0,01 0,0001
Σ 0,01 0,0111 0,04 0,0034 0,07 0,0243 0,04 0,0030
15
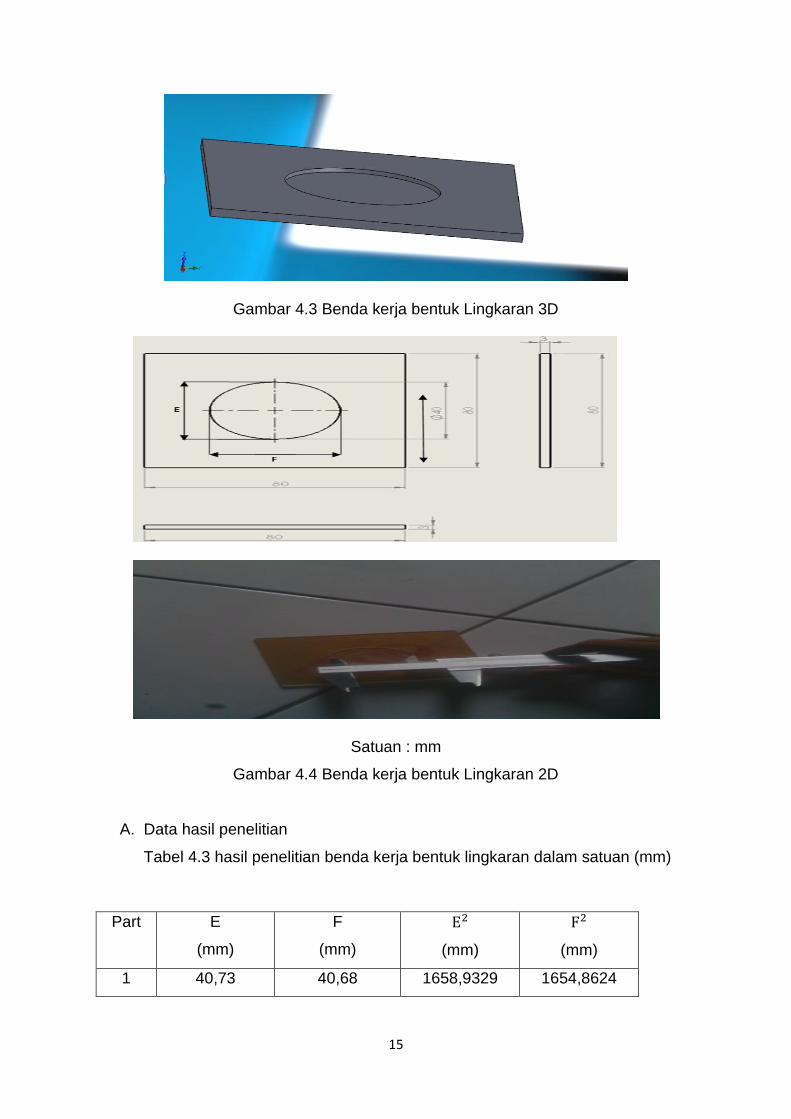
Gambar 4.3 Benda kerja bentuk Lingkaran 3D
Satuan : mm
Gambar 4.4 Benda kerja bentuk Lingkaran 2D
A. Data hasil penelitian
Tabel 4.3 hasil penelitian benda kerja bentuk lingkaran dalam satuan (mm)
Part E
(mm)
F
(mm)
E2
(mm)
F2
(mm)
1 40,73 40,68 1658,9329 1654,8624
16
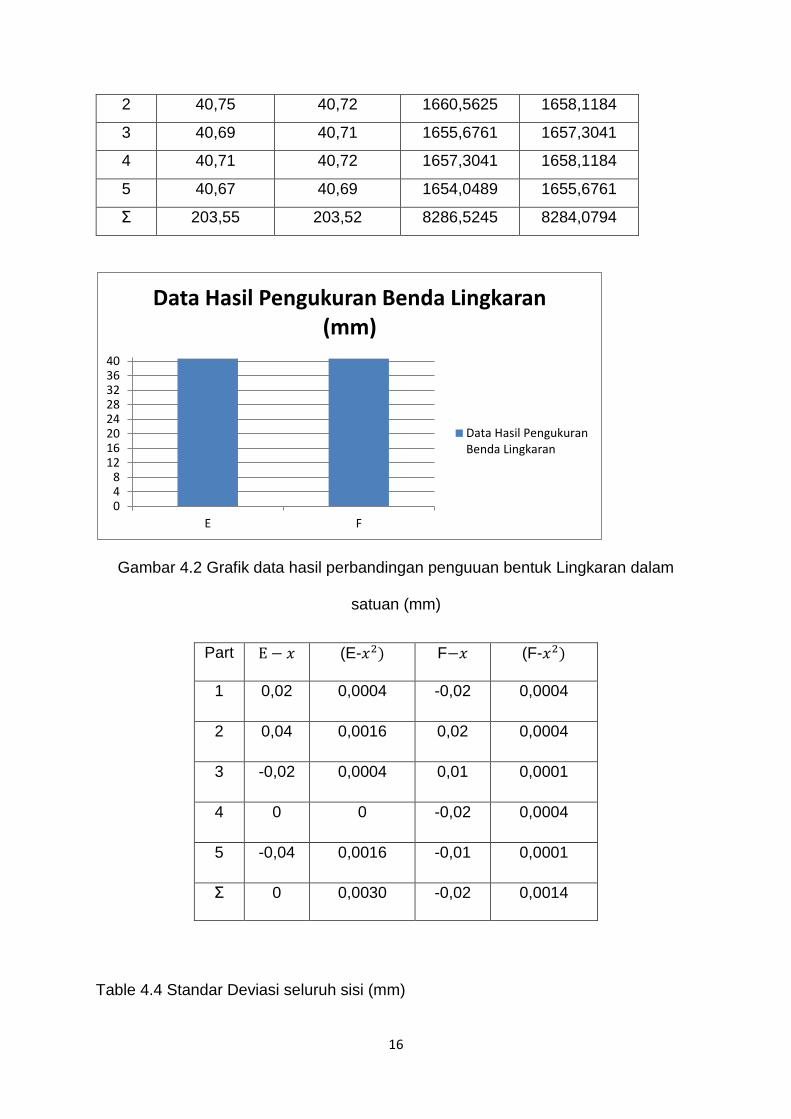
2 40,75 40,72 1660,5625 1658,1184
3 40,69 40,71 1655,6761 1657,3041
4 40,71 40,72 1657,3041 1658,1184
5 40,67 40,69 1654,0489 1655,6761
Σ 203,55 203,52 8286,5245 8284,0794
Gambar 4.2 Grafik data hasil perbandingan penguuan bentuk Lingkaran dalam
satuan (mm)
Table 4.4 Standar Deviasi seluruh sisi (mm)
048
1216202428323640
E F
Data Hasil Pengukuran Benda Lingkaran (mm)
Data Hasil PengukuranBenda Lingkaran
Part E − 𝑥 (E-𝑥2) F−𝑥 (F-𝑥2)
1 0,02 0,0004 -0,02 0,0004
2 0,04 0,0016 0,02 0,0004
3 -0,02 0,0004 0,01 0,0001
4 0 0 -0,02 0,0004
5 -0,04 0,0016 -0,01 0,0001
Σ 0 0,0030 -0,02 0,0014
17
Part Standar Deviasi
E 0,1
F 0,018165
3.Bentuk segienam
Gambar 4.5 Benda kerja bentuk segienam
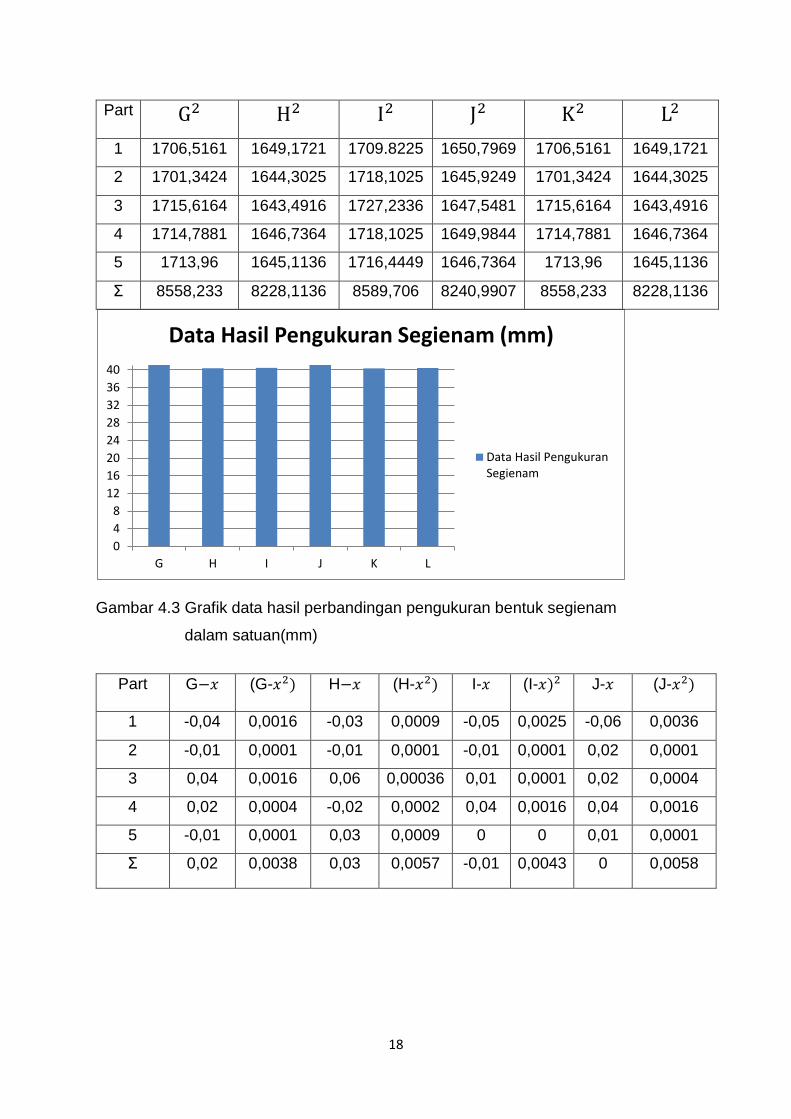
Gambar 4.6 Benda kerja bentuk segienam 2D
Tabel 4.5 Data hasil pengamatan
Part G H I J K L
1 41,33 40,35 40,43 41,35 40,36 40,25
2 41,38 40,37 40,46 41,40 40,33 40,46
3 41,41 40,44 40,48 41,43 40,29 40,26
4 41,39 40,36 40,51 41,45 40,31 40,55
5 41,38 40,41 40,47 41,42 40,43 40,59
Σ 41,37 40,38 40,47 41,41 40,34 40,42
18
Gambar 4.3 Grafik data hasil perbandingan pengukuran bentuk segienam
dalam satuan(mm)
0
4
8
12
16
20
24
28
32
36
40
G H I J K L
Data Hasil Pengukuran Segienam (mm)
Data Hasil PengukuranSegienam
Part G2 H2 I2 J2 K2 L2
1 1706,5161 1649,1721 1709.8225 1650,7969 1706,5161 1649,1721
2 1701,3424 1644,3025 1718,1025 1645,9249 1701,3424 1644,3025
3 1715,6164 1643,4916 1727,2336 1647,5481 1715,6164 1643,4916
4 1714,7881 1646,7364 1718,1025 1649,9844 1714,7881 1646,7364
5 1713,96 1645,1136 1716,4449 1646,7364 1713,96 1645,1136
Σ 8558,233 8228,1136 8589,706 8240,9907 8558,233 8228,1136
Part G−𝑥 (G-𝑥2) H−𝑥 (H-𝑥2) I-𝑥 (I-𝑥)2 J-𝑥 (J-𝑥2)
1 -0,04 0,0016 -0,03 0,0009 -0,05 0,0025 -0,06 0,0036
2 -0,01 0,0001 -0,01 0,0001 -0,01 0,0001 0,02 0,0001
3 0,04 0,0016 0,06 0,00036 0,01 0,0001 0,02 0,0004
4 0,02 0,0004 -0,02 0,0002 0,04 0,0016 0,04 0,0016
5 -0,01 0,0001 0,03 0,0009 0 0 0,01 0,0001
Σ 0,02 0,0038 0,03 0,0057 -0,01 0,0043 0 0,0058
19
Table 4.6 standar deviasi seluruh sisi (mm)
Part Standar Deviasi
G 0,90
H 0,1195
I 0,092
J 0,1204159
K 0,05431
L 0,1612
4.2 Sesudah di Kalibrasi
Hasil menggunakan pemrograman HSMxpress berdasarkan hasil penelitian
tentang keakurasian dimensi diperoleh data keakurasian dalam bentuk tabel
sebagai berikut :
1.Bentuk segiempat
Gambar 4.7 Gambar benda kerja bentuk Segiempat 3D
Part K−𝑥 (K-𝑥2) L−𝑥 (L-𝑥2)
1 0,02 0,0004 -0,17 0,0289
2 -0,01 0,0001 0,04 0,0016
3 0,05 0,0025 -0,16 0,0256
4 -0,03 0,0009 0,13 0,0169
5 0,09 0,0081 0,17 0,0189
Σ 0,02 0,0120 0,01 0,1019
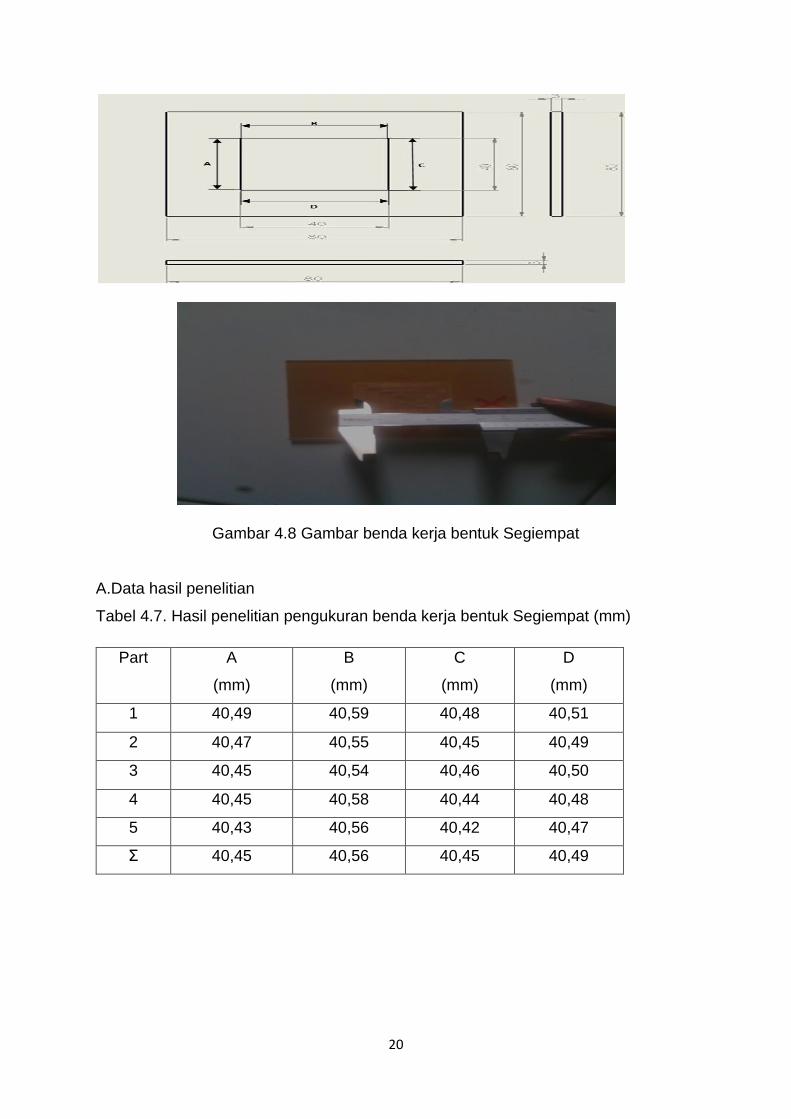
20
Gambar 4.8 Gambar benda kerja bentuk Segiempat
A.Data hasil penelitian
Tabel 4.7. Hasil penelitian pengukuran benda kerja bentuk Segiempat (mm)
Part A
(mm)
B
(mm)
C
(mm)
D
(mm)
1 40,49 40,59 40,48 40,51
2 40,47 40,55 40,45 40,49
3 40,45 40,54 40,46 40,50
4 40,45 40,58 40,44 40,48
5 40,43 40,56 40,42 40,47
Σ 40,45 40,56 40,45 40,49
21
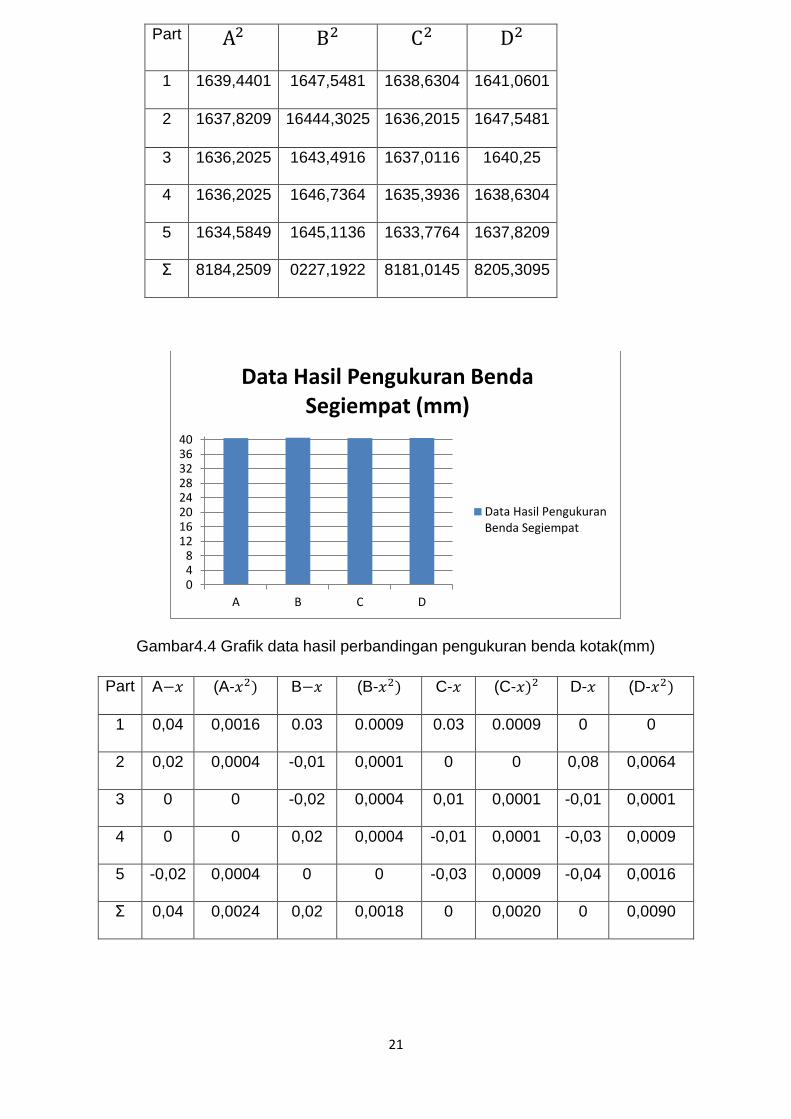
Gambar4.4 Grafik data hasil perbandingan pengukuran benda kotak(mm)
048
1216202428323640
A B C D
Data Hasil Pengukuran Benda Segiempat (mm)
Data Hasil PengukuranBenda Segiempat
Part A2 B2 C2 D2
1 1639,4401 1647,5481 1638,6304 1641,0601
2 1637,8209 16444,3025 1636,2015 1647,5481
3 1636,2025 1643,4916 1637,0116 1640,25
4 1636,2025 1646,7364 1635,3936 1638,6304
5 1634,5849 1645,1136 1633,7764 1637,8209
Σ 8184,2509 0227,1922 8181,0145 8205,3095
Part A−𝑥 (A-𝑥2) B−𝑥 (B-𝑥2) C-𝑥 (C-𝑥)2 D-𝑥 (D-𝑥2)
1 0,04 0,0016 0.03 0.0009 0.03 0.0009 0 0
2 0,02 0,0004 -0,01 0,0001 0 0 0,08 0,0064
3 0 0 -0,02 0,0004 0,01 0,0001 -0,01 0,0001
4 0 0 0,02 0,0004 -0,01 0,0001 -0,03 0,0009
5 -0,02 0,0004 0 0 -0,03 0,0009 -0,04 0,0016
Σ 0,04 0,0024 0,02 0,0018 0 0,0020 0 0,0090
22
Table 4.8 Data hasil standar deviasi semua sisi(mm)
Part Standar Deviasi
A 0,00052
B 0,00043
C 0,022360
D 0,04743
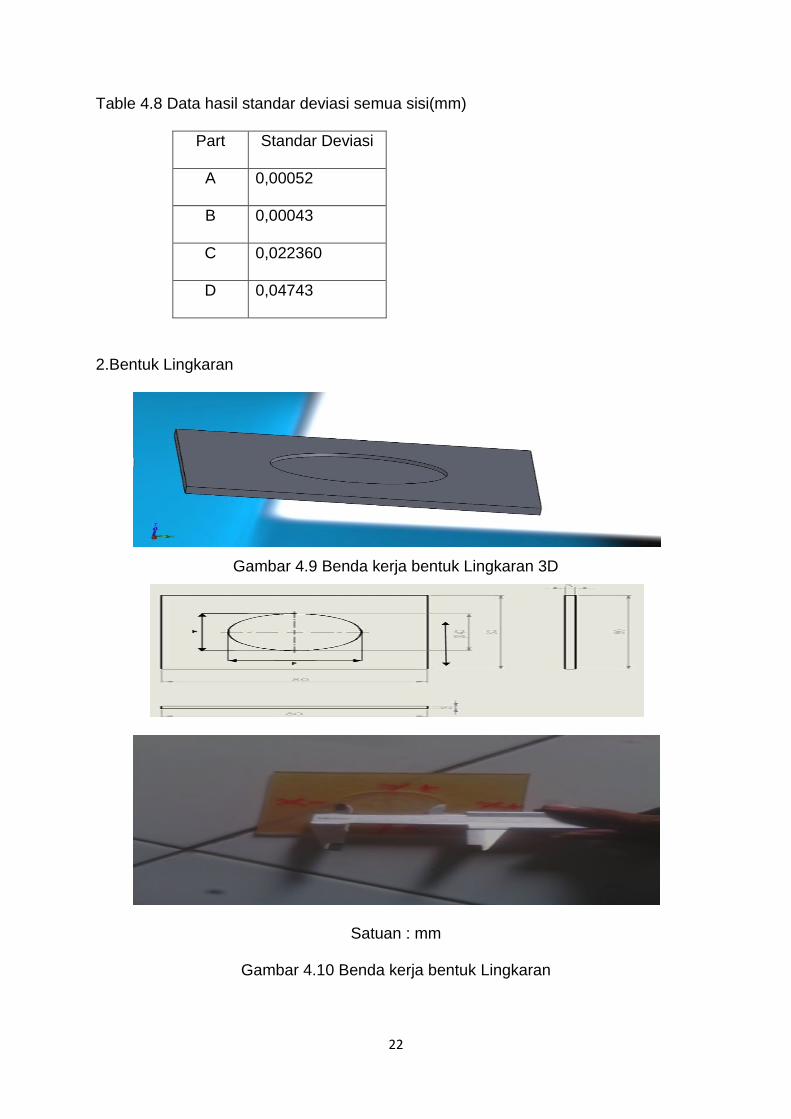
2.Bentuk Lingkaran
Gambar 4.9 Benda kerja bentuk Lingkaran 3D
Satuan : mm
Gambar 4.10 Benda kerja bentuk Lingkaran
23
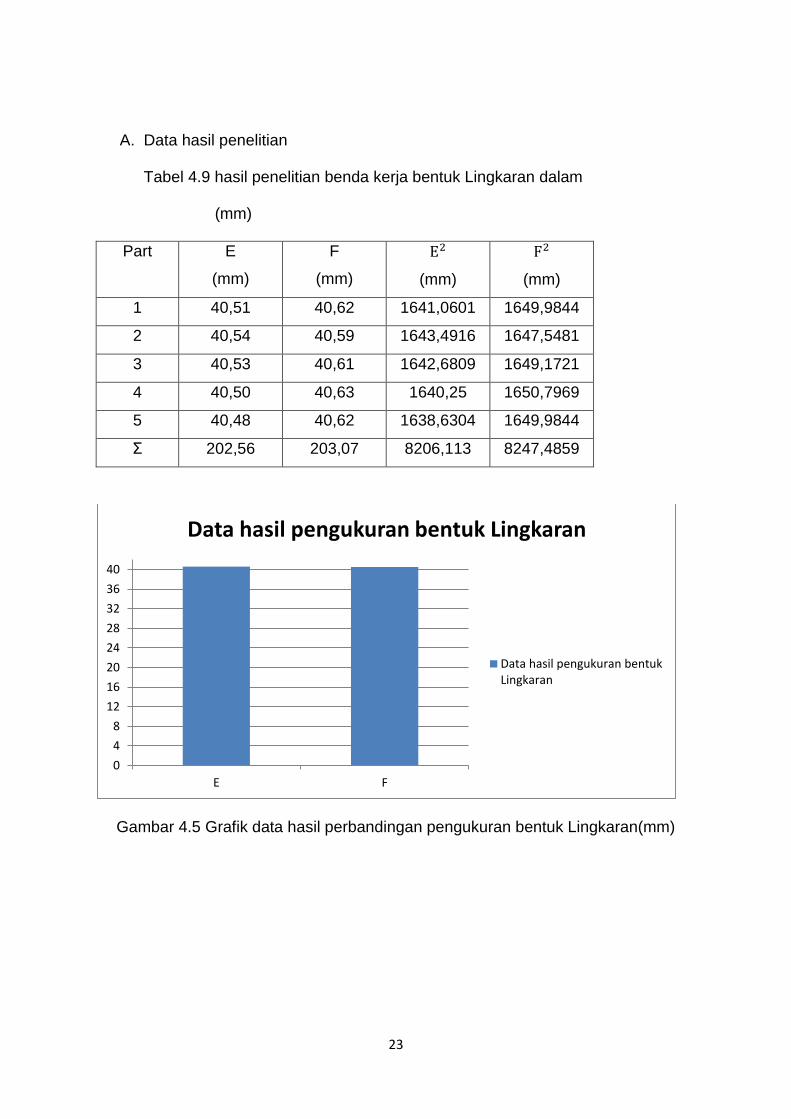
A. Data hasil penelitian
Tabel 4.9 hasil penelitian benda kerja bentuk Lingkaran dalam
(mm)
Part E
(mm)
F
(mm)
E2
(mm)
F2
(mm)
1 40,51 40,62 1641,0601 1649,9844
2 40,54 40,59 1643,4916 1647,5481
3 40,53 40,61 1642,6809 1649,1721
4 40,50 40,63 1640,25 1650,7969
5 40,48 40,62 1638,6304 1649,9844
Σ 202,56 203,07 8206,113 8247,4859
Gambar 4.5 Grafik data hasil perbandingan pengukuran bentuk Lingkaran(mm)
0
4
8
12
16
20
24
28
32
36
40
E F
Data hasil pengukuran bentuk Lingkaran
Data hasil pengukuran bentukLingkaran
24
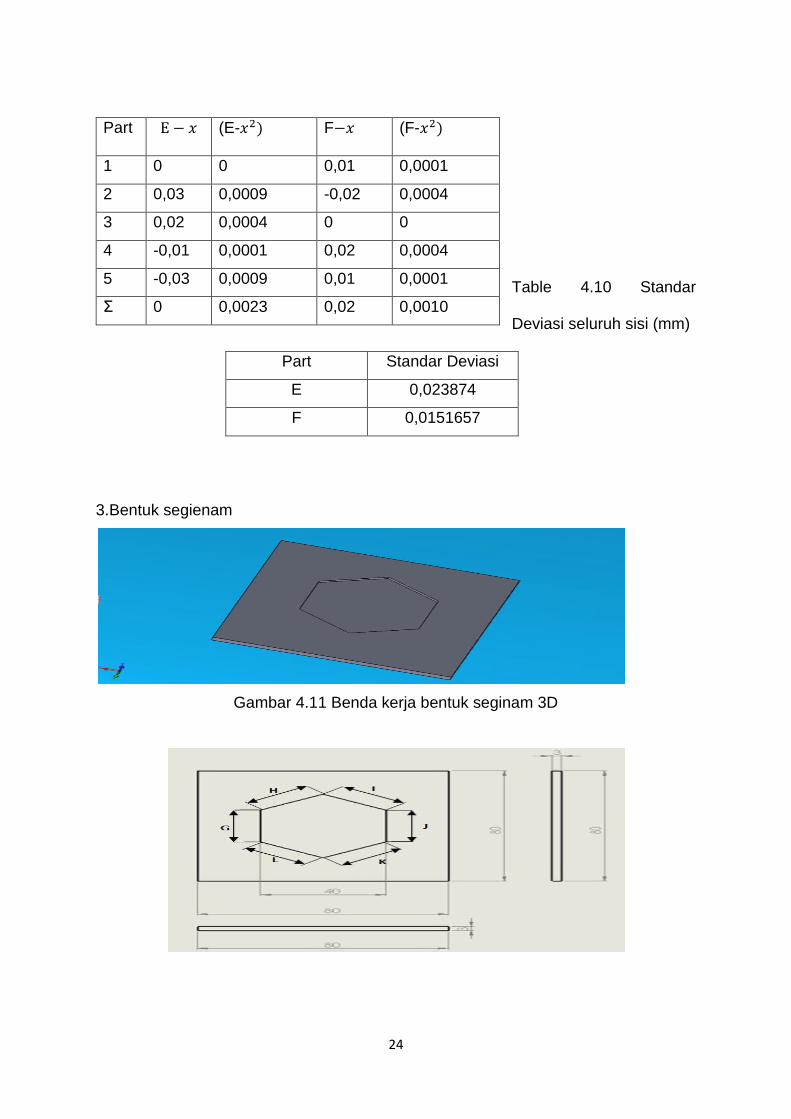
Table 4.10 Standar
Deviasi seluruh sisi (mm)
Part Standar Deviasi
E 0,023874
F 0,0151657
3.Bentuk segienam
Gambar 4.11 Benda kerja bentuk seginam 3D
Part E − 𝑥 (E-𝑥2) F−𝑥 (F-𝑥2)
1 0 0 0,01 0,0001
2 0,03 0,0009 -0,02 0,0004
3 0,02 0,0004 0 0
4 -0,01 0,0001 0,02 0,0004
5 -0,03 0,0009 0,01 0,0001
Σ 0 0,0023 0,02 0,0010
25
Gambar 4.12 Benda kerja bentuk seginam 2D
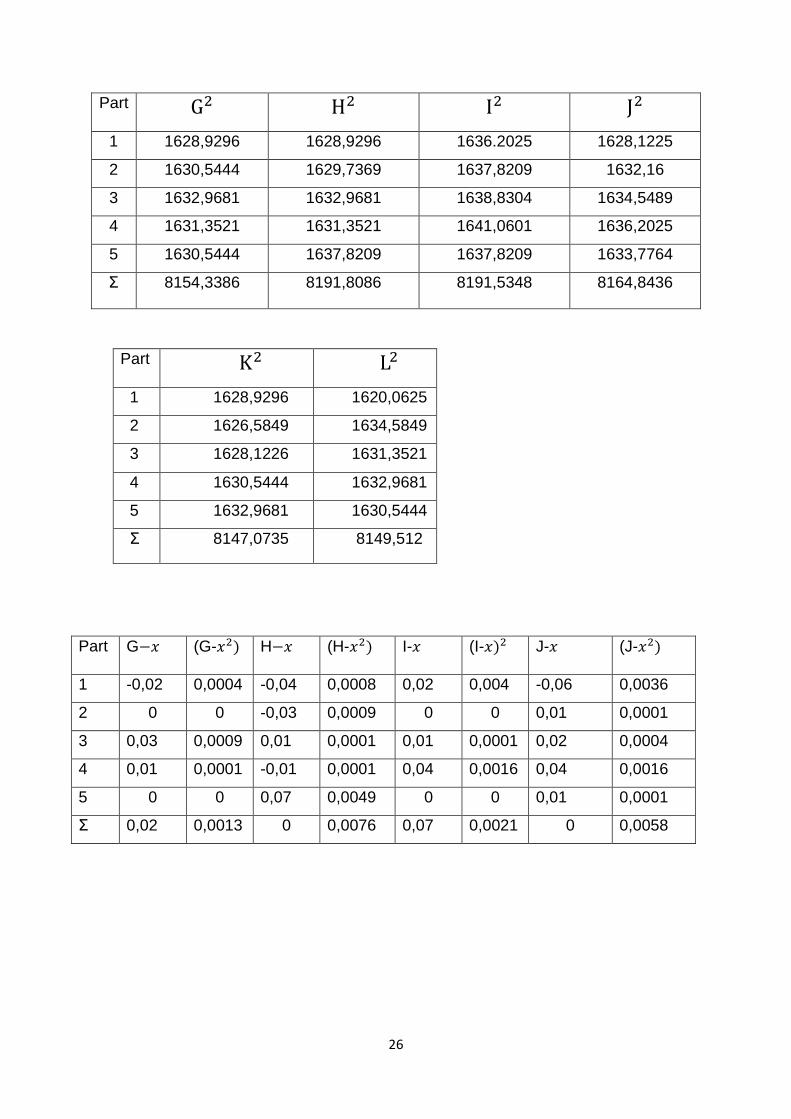
Data hasil penelitian
Tabel 4.11 Data hasil pengamatan bentuk segienam (mm)
Part G H I J K L
1 40,36 40,36 40,45 40,35 40,36 40,25
2 40,38 40,37 40,47 40,40 40,33 40,43
3 40,41 40,41 40,48 40,43 40,35 40,39
4 40,39 40,39 40,51 40,45 40,38 40,41
5 40,38 40,47 40,47 40,42 40,41 40,38
Σ 40,38 40,40 40,45 40,41 40,36 40,37
Gambar 4.6 Grafik data hasil perbandingan penguuan bentuk segienam
048
1216202428323640
G H I J K L
Data pengukuran bentuk segienam (mm)
Data pengukuranbentuk segienam
26
Part K2 L2
1 1628,9296 1620,0625
2 1626,5849 1634,5849
3 1628,1226 1631,3521
4 1630,5444 1632,9681
5 1632,9681 1630,5444
Σ 8147,0735 8149,512
Part G2 H2 I2 J2
1 1628,9296 1628,9296 1636.2025 1628,1225
2 1630,5444 1629,7369 1637,8209 1632,16
3 1632,9681 1632,9681 1638,8304 1634,5489
4 1631,3521 1631,3521 1641,0601 1636,2025
5 1630,5444 1637,8209 1637,8209 1633,7764
Σ 8154,3386 8191,8086 8191,5348 8164,8436
Part G−𝑥 (G-𝑥2) H−𝑥 (H-𝑥2) I-𝑥 (I-𝑥)2 J-𝑥 (J-𝑥2)
1 -0,02 0,0004 -0,04 0,0008 0,02 0,004 -0,06 0,0036
2 0 0 -0,03 0,0009 0 0 0,01 0,0001
3 0,03 0,0009 0,01 0,0001 0,01 0,0001 0,02 0,0004
4 0,01 0,0001 -0,01 0,0001 0,04 0,0016 0,04 0,0016
5 0 0 0,07 0,0049 0 0 0,01 0,0001
Σ 0,02 0,0013 0 0,0076 0,07 0,0021 0 0,0058
27
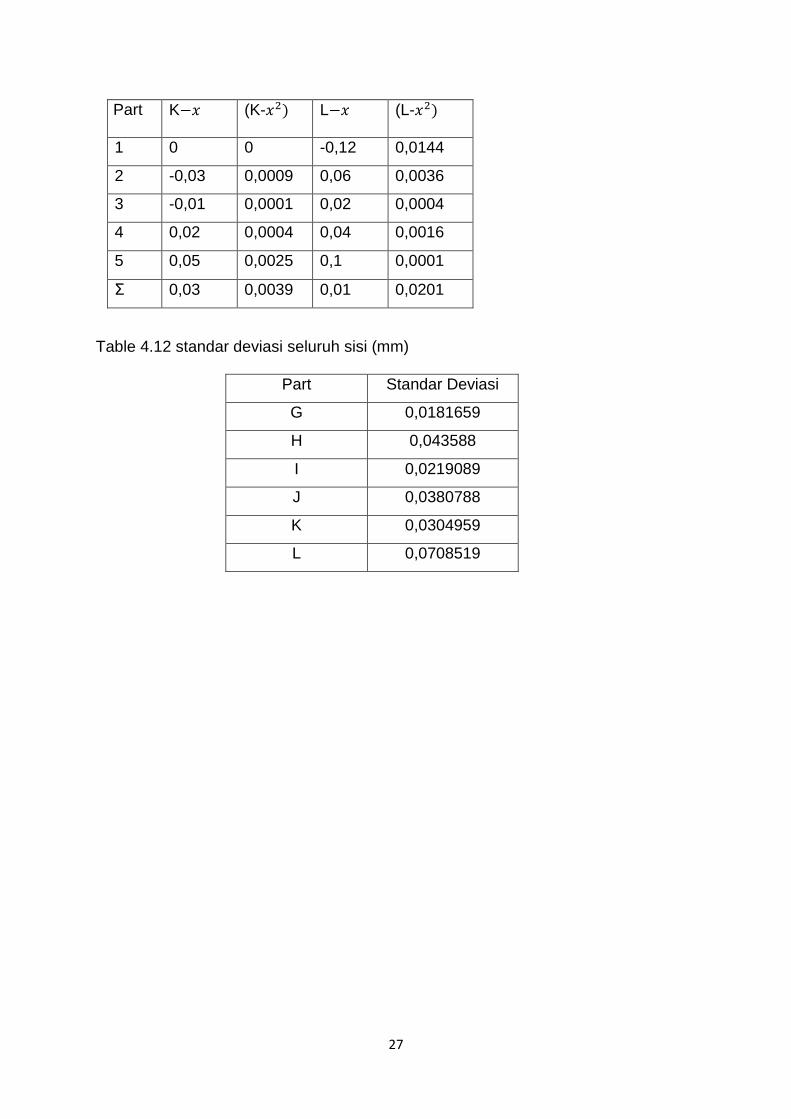
Table 4.12 standar deviasi seluruh sisi (mm)
Part Standar Deviasi
G 0,0181659
H 0,043588
I 0,0219089
J 0,0380788
K 0,0304959
L 0,0708519
Part K−𝑥 (K-𝑥2) L−𝑥 (L-𝑥2)
1 0 0 -0,12 0,0144
2 -0,03 0,0009 0,06 0,0036
3 -0,01 0,0001 0,02 0,0004
4 0,02 0,0004 0,04 0,0016
5 0,05 0,0025 0,1 0,0001
Σ 0,03 0,0039 0,01 0,0201
28
PENUTUP
6.1. Kesimpulan
Pada penelitan ini penulis mendapat kesimpulan diantaranya
adalah :
1. Pada percobaan permesinan mesin CNC ROUTER, pada hasil
pemrograman manual terdapat penyimpangan terbesar pada bentuk
segienam sebesar 0,90 mm dan penyimpangan terkecil pada bentuk
kotak 0,0053 mm. Pada hasil intregasi datapada NC CAD/CAM
HSMxpress di dapat bahwa hasil produk juga terdapat penyimpangan
yaitu pada segienam sebesar 0,07085195 mm dan terkecil pada
bentuk segienam 0,0181659 mm.
2. Tingkat keakurasian yang didapat dari dalam table dapat disimmpulkan
bahwa hasil keakurasian dimensi dari hasil program HSMxpress lebih
akurat dari pada hasil yang didapat dari program manual.
6.2. Saran
Agar pada penelitian yang akan datang dapat lebih baik maka
peneliti memberikan saran yaitu:
1. Pada penyetelan pisau sebaiknya sepindel tidak berputar agar didapat
kepresisian didalam menentukan titik karena nol / awal pahat
2. Pada proses pemesinan hendaknya memperhatikan pencekam benda
kerja, pemasanagn pisau pada tool holder harus sama panjangnya
karena hal tersebut berpengaruh pada hasil kerjanya
3. Kebersihan area pemakanan sebaiknya di perhatikan karena area
yang tidak bersh dapat menimbulkan kekasaran pada benda / produk
yang dibuat.
4. Setiap melakukan penelitian seharusnya menggunakan alat yang
sama ,karena setiap alat mempunyai spesifikasi tersendiri
5. Pada penelitian selanjutnya hendaknya di perpanjang dan di perluas
diantaranya dapat meneeliti perbedaan metode alur pemakanan dan
kedalaman pemakanan terhadap keakurasian dimensinya
29
Daftar Pustaka
.
E. Jantunen, 2002."A summary of methods applied to tool condition monitoring in
drilling", Journal of Machine Tools and Manufacture, Vol. 42,no. 9, pp. 997-
1010.
H.M. Ertunc, K.A. Loparo, 2001."A decision fusion algorithm for tool wear condition
monitoring in drilling", International Journal of MachineTools and
Manufacture, Vol. 41, no. 9, pp. 1347–1362.
H.M. Ertunc, K.A. Loparo, H. Ocak, 2001."Tool wear condition monitoring in drilling
operations using hidden Markov models (HMMs)",International Journal of
Machine Tools and Manufacture, Vol. 41, no. 9, pp. 1363-1384.
I. Abu-Mahfouz, 2003."Drilling wear detection and classification using vibration
signals and artificial neural network", International Journal ofMachine Tools
and Manufacture, Vol. 43, no. 7, pp. 707-720.
Klaic, Miho,dkk. 20̊̊̊̊̊̊̊̊̊̊̊10̊̊̊̊̊̊̊̊̊̊̊“Tool Wear Classification using Decision Trees in Stone
Drilling Applications” : Preliminary Study
K. Subramanian, N.H. Cook, 1977."Sensing of drill wear and prediction of drill life
(I)". Journal of Engineering for Industry, Transactions of theASME, Vol. 99,
no. 2, pp. 295–301.
L. A. Franco-Gasca, G. Herrera-Ruiz, R. Peniche-Vera, R. de J. Romero-
Troncoso, W. Leal-Tafolla, 2006."Sensorless tool failure monitoring system
for drilling machines". International Journal of Machine Tools and
Manufacture, Vol. 46, no. 3-4, pp. 381-386.
L. Xiaoli, 1999."On-line detection of the breakage of small diameter drills using
current signature wavelet transform". International Journal ofMachine Tools
and Manufacture, Vol. 39, no. 1, pp. 157-164.
R. Teti, K. Jemielniak, G. O’Donnell, D. Dornfeld, 2010"Advanced monitoring of
machining operations", CIRP Annals – Manufacturing Technology, Vol. 59,
no. 2, pp. 717-739.
S.C. Lin, C.J. Ting, 1995."Tool wear monitoring in drilling using force signals".
Wear, Vol. 180, no. 1-2, pp. 53-60.
X. Wang, P.Y. Kwon, C. Sturtevant, D. Kim, J. Lantrip, "Tool wear of coated drills
in drilling CFRP", Journal of Manufacturing Processes,Vol. 15, no. 1, pp.
127-135, 2013.