Proposal
27
OTOMASI ALAT PERAJANG TEMBAKAU SKALA INDUSTRI KECIL DAN RUMAH TANGGA PADA PETANI TEMBAKAU DI TEMANGGUNG Usulan Penelitian untuk Tesis S-2 Minat Studi Magister Teknik Sistem Konsentrasi Teknologi Sistem Industri Kelompok Bidang Ilmu Teknik Diajukan Oleh : Muchamad Malik 10/310488/PTK/07265 Kepada PROGRAM PASCASARJANA UNIVERSITAS GADJAH MADA YOGYAKARTA Agustus, 2011
-
Upload
malik-muchamad -
Category
Documents
-
view
387 -
download
0
Transcript of Proposal

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 1/27
OTOMASI ALAT PERAJANG TEMBAKAU SKALA INDUSTRI KECIL DAN RUMAH
TANGGA PADA PETANI TEMBAKAU DI TEMANGGUNG
Usulan Penelitian untuk Tesis S-2
Minat Studi Magister Teknik Sistem
Konsentrasi Teknologi Sistem Industri
Kelompok Bidang Ilmu Teknik
Diajukan Oleh :
Muchamad Malik
10/310488/PTK/07265
Kepada
PROGRAM PASCASARJANA
UNIVERSITAS GADJAH MADA
YOGYAKARTAAgustus, 2011

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 2/27
BAB I
PENDAHULUAN
1.1 Latar belakang
Temanggung yang bergunung-gunung merupakan areal ideal bagi tanaman tembakau.
Tembakau temanggung dikenal sangat berkualitas dibandingkan tembakau dari daerah manapun.
Karena itu pabrikan rokok besar banyak yang membuka gudang di daerah ini. Panen raya
tembakau biasanya jatuh pada bulan Agustus hingga Oktober setiap tahunnya. Dunia
pertembakauan mampu mengangkat perekonomian masyarakat dengan cepat dan banyak
mempengaruhi sektor ekonomi lainnya.
Rata-rata setiap tahunnya Luas lahan (2007): 13.039,90 hektar Produksi (2007) :
8.019,44 Ton, Produktivitas : 457 Kg/Ha, Jumlah Petani : 40.992 orang, Lahan Potensi : 21.000
Ha ( sumber : http://www.temanggungkab.go.id/index.php).
Jenis komoditas kekayaan pertanian Tembakau yang mempunyai nilai ekonomis penting yang
banyak diusahakan dan kembangkan diantaranya adalah tembakau. Produkt ivi tas tembakau
Temanggung yang dicapai petani masih rendah, rata-rata 441.14 kg/ha (DALMADIJO. 2008).
Produktivi tas tersebut masih dapat di tingkatkan, karena dari berbagai penelitian, produksi dapat
mencapai 0.615 ton/ha. Tembakau Temanggung yang di tanam petani merupakan campuran dari
berbagai genotipe karena bibit dibeli dari pedagang bibit. Bibit yang diperdagangkan di pasar
Parakan berasal dari lereng Gunung Sumbing, Dieng, dan Merapi .
Variabilitas tanaman menjadi semakin besar karena adanya variasi lahan (topografi dan
jenis tanah) maupun agroklimatnya. Tembakau Temanggung ditanam di 12 kecamatan dengan
5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 3/27
topografi datar, berbukit, sampai pada lereng-lereng gunung dengan kemiringan 60 persen dan
ketinggian tempat antara 600-1500 m dpl. Jenis tanahnya regosol dan latosol, dengan tekstur
lempung, lempung berpasir, dan pasir, sedangkan lahannya berupa tegal, sawah tadah hujan, dan
sawah irigasi. Tembakau Temanggung memberikan sumbangan 70- 80 persen terhadap total
pendapatan petani, sehingga meningkatkan hasil dan mutu akan besar pengaruhnya terhadap
peningkatan total pendapatan petani. Salah satu cara memperbaiki varietas lokal adalah dengan
seleksi. Seleksi galur murni pada tanaman menyerbuk sendiri dapat menghasilkan galurgalur
baru dalam waktu yang relat if cepat , karena seleksi individu bisa dilakukan hanya satu generasi
saja.
Pada tahun 1986 mulai di lakukan seleksi individu pada varietas lokal Kemloko (Gober
genjah). Empat galur mempunyai indeks mutu 2.90- 33.47 persen lebih tinggi dari Kemloko
lokal, dua galur diantaranya disertai peningkatan hasil rajangan kering sebesar 18.22 dan 28.30
persen. Indeks tanaman keempat galur tersebut meningkat antara 15.75-32.02 persen disbanding
Kemloko lokal. Penelitian ini bertujuan untuk memperoleh galur tembakau Temanggung, yang
lebih baik dari Kemloko local.
1.2 Rumusan Masalah
Proses produksi perajangan tembakau di Kota Temanggung masih menggunakan cara
tradisional yaitu cara “ngrajang” dengan menggunakan tenaga manusia untuk memotong daun
tembakau yang sudah matang. Cara tersebut tidak efektif dan mutu serta kualitas tembakau yang
dihasilkan rendah. Disamping itu, dengan teknik ”ngrajang” tersebut tidak semua daun tembakau
terpotong dengan baik. Perlu ada upaya penemuan alat/mesin perajang tembakau yang efektif,

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 4/27
efisien aman, serta mudah dioperasikan yang diharapkan dapat meningkatkan mutu dan kualitas
yang dihasilkan.
1.3 Batasan Masalah
Untuk mendapatkan perencanaan yang baik banyak hal yang perlu diperhatikan. Dalam
perencanaan rancang bangun mesin perajang tembakau , penulis memfokuskan dan menentukan
batasan-batasan masalah sebagai berikut :
1. Perancangan alat ini hanya membahas bagian sistem control saja
2. Menggunakan mikrokontroler ATMega 8535
3. Menggunakan bahasa pemrograman BASCOM AVR
4. Menggunakan motor dc
5. Sensor utama yang digunakan adalah infra merah dan photo diode
1.4 Keaslian Penelitian
Sejauh studi pustaka yang dilakukan penulis, belum ada alat perajang tembakau yang
mengintegrasikan antara mikrokontroler sebagai dan sensor sebagai metode perajang tembakau.
1.5 Tujuan dan Manfaat
1.5.1 Tujuan dari Penelitian ini adalah :
1. Merancang alat yang dapat bermanfaat dan membantu tugas manusia terutama di bidang
industry kecil
2. Mengetahui tingkat akurasi sistem pengontrolan

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 5/27
3. Mengintegrasikan berbagai sistem kedalam satu kesatuan berbasis mikrokontroler
1.5.2 Manfaat dari penelitian ini adalah:
1. Meningkatkan kinerja manusia
2. Menghasilkan teknologi yang tepat guna untuk berbagai bidang

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 6/27
BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI
2.1 Tinjauan Pustaka
2.1.3 Rajang Tembakau Manual
Rajang tembakau manual di Temanggung samapai saat ini masih digunakan karena
biayanya yang hemat. Selain hemat, ketebalan tembakau juga dapat disesuakan dengan
kebutuhan dan permintaan dari pedagan. Namun rajang tembakau manual ini mempunyai
kekurangan yaitu masih menggunakan tenaga manusia. Hal ini akan berpengaruh saat proses
perajangan membutuhkan waktu yang lama dan stok tembakau banyak, sehingga kualitas akan
menurun dan tingkat kepresisian hasil rajangan juga menurun.
2.1.2 Rajang Tembakau Mesin
Rajang tembakau mesin saat ini digunakan oleh petani yang mempunyai modal besar,
karena alat ini digunakan untuk merajang tembakau dengan skala yang lebih besar disbanding
dengan alat perajang tembakau manual. Biasanya alat rajang tembakau mesin ini mampu
merajang antara 70 kg/jam – 200 kg/jam tergantung dengan jenis motor yang digunakan.
Kelabihan alat perajang tembakau ini adalah :
1. Dapat merajang tembakau dengan kapasitas besar
2. Proses perajangan yang cepat
3. Mudah digunakan

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 7/27
4. Motor Penggerak tahan panas
Disamping mempunyai berbagai kelebihan, perajang tembakau mesin ini juga mempunyai
kekurangan diantaranya :
1. Mempunyai daya listrik yang besar
2. Kecepatan tidak dapat dikontrol
3. Biaya pembuatan yang mahal
2.1.3 Kontrol Motor
Kontrol adalah bagian amat penting dalam alat ini. Sistem otomasi tanpa kontrol hanya
akan menjadi benda mekatronik yg mati. Dalam sistem kontrol otomasi terdapat dua bagian yaitu
perangkat keras elektronik dan perangkat lunak berisi program kemudi dan algoritma kontrol.
Secara garis besar, suatu sistem robotik terdiri dari 3 bagian seperti gambar berikut ini :

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 8/27
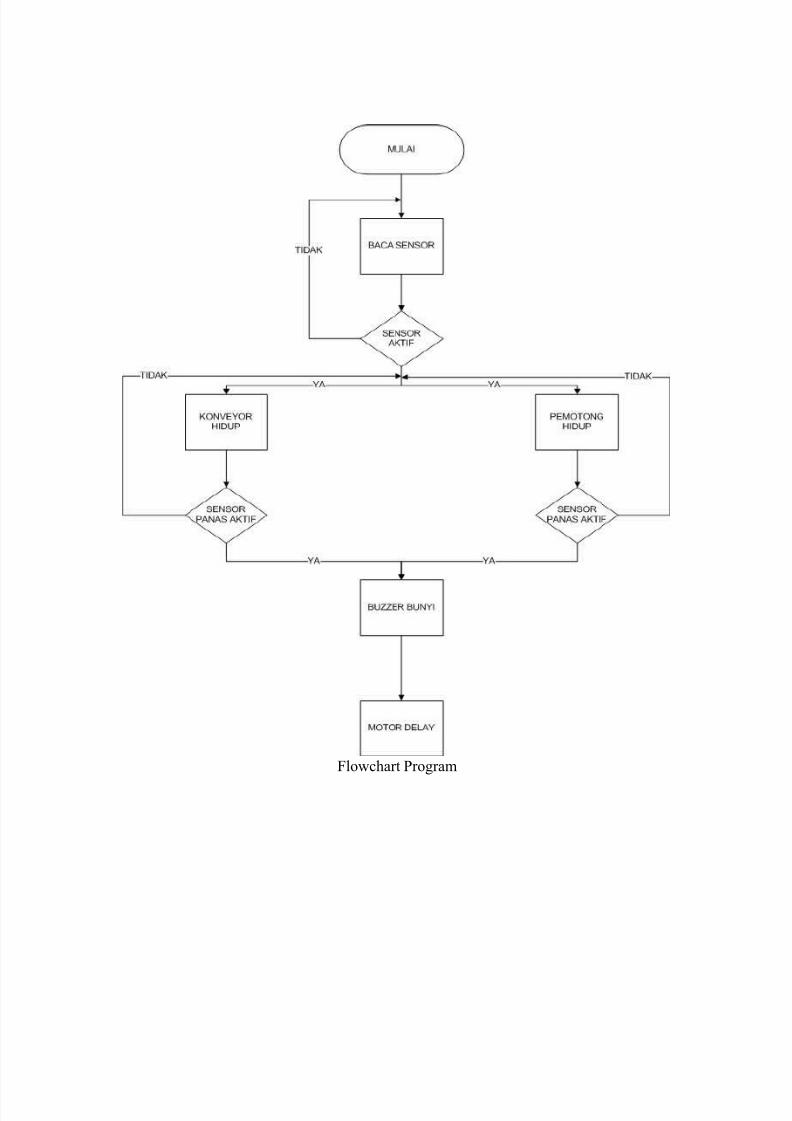
Tiga prosedur utama, yaitu baca sensor, memproses data sensor, dan mengirim sinyal
aktuasi ke aktuator adalah tugas utama kontroler. Ada dua macam teknik yang digunakan
kontroler dalam menghubungi dan membaca sensor yaitu polling dan interrupt. Teknik polling
adalah prosedur membaca data berdasarkan pengalamatan langsung yang dapat dilakukan kapan
saja kontroler menghendaki, sedang pada teknik interrupt, kontroler melakukan pembacaan jika
sistem sensor melakukan interupsi, yaitu dengan memberikan sinyal interupt kekontroler (via
perangkat keras) agar kontroler (CPU) melakukan proses pembacaan.selama tidak ada interupt
maka kontroler tidak dapat mengakses sensor tersebut.
Kontrol
Mekanik Elektronik

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 9/27
2.2 Dasar Teori
2.2.1 Sensor gerak
Sensor gerak ini digunakan untuk menetukan gerakan konveyor dan member intruksi
mikrokontroler untuk member sinyal pada motor pemotong. Prinsip kerja sensor ini adalah
sebuah infra merah akan memancarkan cahaya yang nanti akan ditangkap oleh sebuah fotodioda.
Apabila sinar yang dipancarkan inframerah tesebut terhalang oleh benda, yang diasumsikan
benda tersebut adalah tembakau, maka akan mikrokprosesor akan memproses sinyal tersebut
untuk mengaktifkan motor penggerak pisau rajang.
Sensor ini akan diletakkan pada konveyor sebanyak tiga buah, dengan posisi yang
disesuaikan dengan setingan yang presisi untuk menghasilkan data dan pengolahan yang presisi
pula dalam mikrokontroler.
Konvayor
Tampak Samping
Sensor
1
Sensor
2
Sensor
3
IR 3
PD 3 PD 2
IR 2
PD 1
IR 1
A r a h
S i n a r I n f r a M e r a h
A r a h
S i n a r I n f r a M e r a h
A r a h
S i n a r I n f r a M e r a h
Gambar Sensor pada Konveyor

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 10/27
Arsitektur dari sensor ini adalah menggunakan prinsip Two Out Of Three (2oo3) yaitu
apabila sensor 1 mati atau foto diode dapat menangkap sinar infra merah namun sensor 2 dan
sensor 3 hidup atau foto diode tidak dapat menangkap sinar infra merah maka mikrokontroler
akan mengaktifkan konveyor dan motor pemotong. Apabila sensor 1 dan sensor 2 mati namun
sensor 3 masih hidup maka mikrokontroler akan memnganggap tembakau yang ada di konveyor
sudah habis sehingga motor yang ada dikonveyor dan motor pemotong juga mati. Apabila dalam
konveyor tersebut tidak ada tembakau, namum konveyor dan motor pemotong tetap bergerak hal
itu dapat diakibatkan oleh infra merah atau foto diode dalam keadaan kotor atau terdapat
penghalang datangnya sinar infra merah menuju foto diode.
Sensor 1 Sensor 2 Sensor 3 Konveyor Pemotong
1 1 1 1 1
1 1 0 1 1
1 0 0 0 0
1 0 1 1 1
0 1 1 1 0
0 0 1 0 0
0 0 0 0 0
Tabel Logika Sensor
2.2.2 Mikrokontroler ATMega8535
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur
RISC (Reduced Instruction Set Computer ). Hampir semua instruksi dieksekusi dalam satu siklus
clock AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode
compare , interrupt i nternal dan eksternal , serial UART, programmable Watchdog Timer
,dan mode po we r saving , ADC dan PWM internal.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 11/27
Mikrokontroler ini akan memproses data-data dari sensor gerak untuk menggerakan dan
mematikan konveyor, mengontrol kecepatan motor pemotong dan memproses data pada sensor
suhu yang ada dalam motor penggerak tersebut.
M ik rokon t ro le r
M o t o r pengge rak
K o n v aS en so r P a n as S enso r G e ra k
O U T P U T G E R A K A N
P on t es iom e t e r
In p ut D a ta Su hu In pu t D a ta A n alo g
O u t p u t G e r
Gambar Diagram Kerja Mikrokontroler
Gambar diatas dapat dijelaskan bahwa mikrokontroler akan mendapat inputan dari sensor
panas ,sensor grak dan penggerak. Sensor panas akan menghitung suhu yang dihasilkan oleh
putaran motor penggerak sampai dengan suhu maksimal. Apabila suhu telah mencapai titik
maksimal, maka mikrokontroler akan memberikan intruksi untul mematikan motor penggerak
sehingga motor akan lebih aman dan stabil.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 12/27
Sensor gerak yang terdiri dari inframerah dan photodiode akan memberikan sinyal analog
ke mikrokontroler. Apabila dari bit sensor 1 ,sensor 2, sensor 3 adalah logika 1 atau kedua sensor
dalam logika 1 maka mikrokontroler akan memberikan intruksi untuk mematikan motor
konveyor. Namun, apabila ketiga sensor tersebut dalam logika 0 atau sensor 2 dan sensor 3
dalam logika 0 juga, maka mikrokontroler akan memberikan intruksi untuk menggerakkan motor
pada konveyor.
Pengontrol yang terdapat pada alat ini digunakan untuk mengest kecepatan putar motor
penggerak, sehingga kecepatannya dapat disesuaikan dengan keadaan yang kita inginkan.
2.2.3 Metode Pengontrolan Kecepatan Motor
Pulse Width Modulation adalah pembangkit suatu nilai tegangan analog, dari suatu nilai
digital. PWM diaplikasikan sebagai pengatur kecepatan motor DC. Konsepnya. Data-data
kecepatan didapat dari mikrokontroler. Mikro ini akan memberikan masukan berupa data digital
kepada rangkaian PWM. Rangkaian ini akan mengubah nilai digital tadi menjadi nilai tegangan
analog yang masuk ke motor DC. Kecepatan motor DC akan berubah dipengaruhi oleh tegangan
yang masuk.
Inti dari pengubahan nilai digital ke analog adalah dengan mengubah-ubah nilai tegangan
dalam 1 dutycycle. Dutycycle menyatakan fraksi waktu sinyal pada keadaan logika high pada
satu siklus. Singkatnya, dalam 1 dutycycle diberi 2 nilai digital yaitu ’1′ dan ’0′. Jika
perbandingan antar keduanya seimbang (1:1), maka akan diperoleh nilai dutycycle 50%, dengan
kata lain keluaran dari rangaian PWM adalah tegangan analog dengan nilai 50% dari tegangan
maksimumnya.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 13/27
Dari gelombang kotak yang bisa di lihat pada gambar diatas maka :
Ton adalah waktu dimana keluaran bernilai tinggi “high” dan Toff adalah waktu dimana
keluaran bernilai rendah “low”. Sedangkan Ttotal adalah waktu total atau periode dari gelombang
kotak tersebut,
Duty cycle dari gelombang kotak di definisikan sebagai berikut :
Sedangkan tegangan keluaran bervariasi sebanding dengan duty cycle
Jadi bisa dilihat bahwa hasil akhir persamaan dari keluaran tegangan bisa di variasi
dengan merubah nilai dari Ton. Jika Ton bernilai 0, maka Vout juga bernilai 0. Jika Ton bernilai
sama dengan Ttotal maka Vout sama dengan Vin atau bernilai sama dengan tegangan maksimum.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 14/27
2.3 Perancangan Alat
Perancangan alat ini didasarkan pada alat yang sudah ada di pasaran dengan
memodifikasi pada beberapa rangkaian mekanik yang disesuaikan dengan kebutuhan pada tesis
ini. Untuk dimensi alat ini adalah lebar 70 cm panjang 70 cm dan tinggi 70 cm yang disesuaikan
dengan rata-rata tinggi badan petani di Temanggung.
Rangka ini menggunakan plat besi dengan ukuran lebar 4 cm dan tebal 3 mm agar
konstuksi lebih rigan namun kuat saat diberi beban.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 15/27
Gambar Rancangan Mekanik
Penggerak utama dari alat ini adalah dengan menggunakan motor dc dengan gear box
agar mempunyai torsi yang lebih besar. Untuk menggerakkan pisau perajang nya gear box
tersebut rirangkaikan dengan dua buah pulley dan sebuah belt agar memiliki putaran yang searah
dengan putaran motor.
5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 16/27
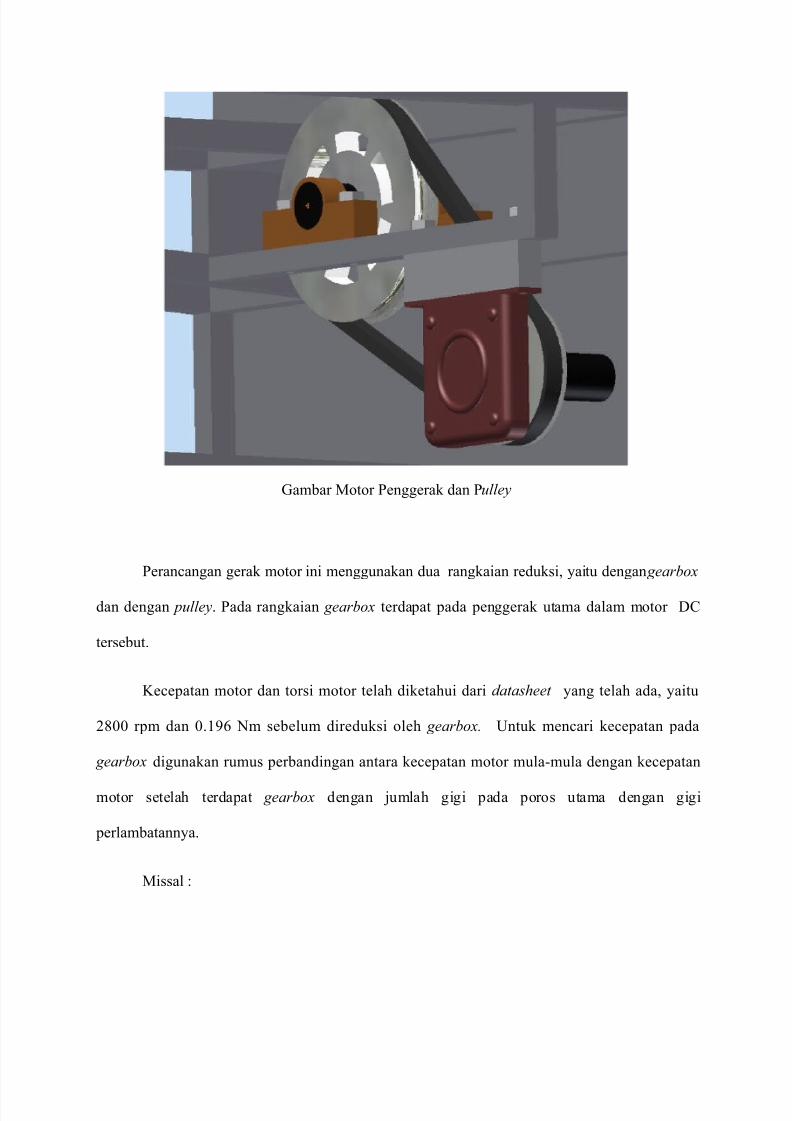
Gambar Motor Penggerak dan Pulley
Perancangan gerak motor ini menggunakan dua rangkaian reduksi, yaitu dengan gearbox
dan dengan pulley. Pada rangkaian gearbox terdapat pada penggerak utama dalam motor DC
tersebut.
Kecepatan motor dan torsi motor telah diketahui dari datasheet yang telah ada, yaitu
2800 rpm dan 0.196 Nm sebelum direduksi oleh gearbox. Untuk mencari kecepatan pada
gearbox digunakan rumus perbandingan antara kecepatan motor mula-mula dengan kecepatan
motor setelah terdapat gearbox dengan jumlah gigi pada poros utama dengan gigi
perlambatannya.
Missal :

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 17/27
v1 = keccepaan awal (rpm)
v2 = kecepatan setelah direduksi (rpm)
n1 = jumlah gigi poros utama
n2 = jumlah gigi perlambatan
n1v1 = n2v2
45 * 2800 = 130 * v2
12600 ÷ 130 = v2
969,2 = v2
Sehingga rasio gigi tersebut dapat ditung dari :
R = 130 : 45
= 2,89
Dari perbandingan rasio tersebut dapat dicari besar torsi yang dihasilkan dari gearbox
adalah besar rasio pada kedua gigi merupakan perbandingan antara torsi pada gigi perlambatan
( Tb) dengan torsi pada gigi poros.
R = Tb ÷ Ta
2,89 = Tb ÷ 0,996 Nm
Tb = 0,54 Nm

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 18/27
Sehingga hasil kecepatan dan torsi pada gigi perlambaten tersebut akan dijadikan input
pada pulley , untuk menghitung kecepatan dan torsi pada pulley dapat dibuat persamaan :
n1 = putaran pulley penggerak (rpm)
n2 = putaran pulley yang digerakkan (rpm)
dp = diameter pulley penggerak (m)
Dp = diameter pulley yang digerakkan (m)
n 2 = 181,72 rpm
dari hasil diatas maka dapat diketahui torsi pully yang digerakkan dengan persamaan :

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 19/27
Tc = 28,8 Nm
Keterangan :
Tb = torsi roda gigi pada inputan pulley penggerak (Nm)
Tc = torsi pada output pulley yang digerakkan (Nm)

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 20/27
Rancangan Rangka Alat Perajang Tembakau

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 21/27
5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 22/27
Flowchart Program

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 23/27
BAB III
METODE PENELITIAN
Metode penelitian yang digunakan untuk menguji alat ini adalah metode eksperimental
dengan membuat alat secara bertahap dan dilakukan ujian serta pengambilan data dari uji
tersebut.
3.1 Langkah Penelitian
Langkah penelitian dimulai dengan melakukan pendefinisian masalah dan tujuan
dilakukannya penelitian. Observasi dilakukan langsung di kota Temanggung dan laboratorium
robotika STMIK AMIKOM Yogyakarta.
3.1.1 Perancangan
Dalam suatu perancangan hendaknya terlebih dahulu mengetahui dan membuat data-data
perancangan yang akan dikerjakan sehingga proses perancangan dapat berjalan dengan baik.
Dalam perancangan robot ini, data perancangan yang dimiliki adalah :
1. Kapasitas maksimal per jam yang mampu dirajang oleh alat ini
2. Sensitifitas sensor
3. Nilai ekonomi yang akan dihasilkan oleh alat ini
3.1.2 Pengujian
Pengujian alat terdiri dari uji fungsional dan uji performansi. Uji fungsional bertujuan
untuk mengetahui apakah hasil rancang bangun dapat berfungsi sesuai dengan disain yang

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 24/27
diharapkan. Setelah dilakukan uji fungsional dilakukan uji performansi. Parameter yang
digunakan untuk mengevaluasinya Perbaikan-perbaikan terhadap alat yang telah dibuat
dimungkinkan bilamana hasil yang dicapai tidak sesuai dengan tujuan penelitian ini, yaitu dapat
melakukan kerja secara efektif, efisien, aman, dan secara operasional dan perawatannya mudah
dilakukan.
3.2 Variabel
Variabel yang diteliti terdiri dari variabel bebas dan terikat:
1) Variabel Bebas : kecepatan gerak motor, dan variasi pegontrolan otomatis.
2) Variabel Terikat :sensitifitas sensor, resolusi dan kapasitas maksimum tembakau yang dapat
dirajang oleh alat ini per jam

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 25/27
Flowchart Penelitian
Selesai
Hasil dan
Kesimpulan
Pengambila
n, analisis
data hasil
Uji Alat
Uji Alat
Perancangan dan
Pengujian Alat
Analisis data
Studi
literaturObseervasi
Mulai
Identifikasi Masalah

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 26/27
3.3 Objek Penelitian
Dalam penelitian ini yang menjadi objek penelitian adalah penggarap sawah dengan
modal yang kecil di desa Belimbing kelurahan Morobongo Kabupaten Temagggung .
3.4 Teknik Pengumpulan Data
Adapun teknik yang digunakan dalam pengumpulan data untuk menyusun Tesis ini
adalah sebagai berikut :
1. Metode Observasi
Dengan cara mendatangi secara langsung para petani di desa Blimbing kelurahan
Morobongo Kabupaten Temanggung dan mempelajari peralatan proses perajangan
tembakau yang menjadi obyek penelitian untuk mengetahui lokasi dan mendapat data-
data yang diperlukan dalam penelitian.
2. Metode Wawancara (Interview)
Yaitu dengan cara mengadakan tanya jawab dengan para petani secara langsung dengan
tujuan untuk mendapatkan data proses perajangan tembakau dan pencatatan spesifikasi
produk yang akan diteliti.
3. Metode Dokumentasi
Dengan cara mendatangi langsung tempat penelitian dan melakukan pengambilan gambar
yang dibutuhkan sebagai bukti pelaksanaan penelitian dan pencatatan data yang
diperlukan.

5/9/2018 Proposal - slidepdf.com
http://slidepdf.com/reader/full/proposal-559bf91320874 27/27
4. Metode Studi Pustaka
Dengan cara mencari dan mengumpulkan beberapa referensi yang berkaitan dengan
permasalahan yang diangkat untuk dijadikan acuan dalam penulisan Tesis ini.
5. Metode eksperimental untuk menetapkan kondisi optimal proses pasteurisasi dengan alat
yang dirancang dan dibuat dalam penelitian ini.