Prezentare Electromecanica1
19
GRUPUL DE SISTEME ELECTROMECANICE Coordonator științific: Prof. Dr. Ing. Horia HEDEȘIU Aplicații simultane de cartografiere și localizare folosind roboți mobili 1 Absolvent: Ádám Mihály Kis Departamentul de Mașini și Acționări Electrice
Transcript of Prezentare Electromecanica1

GRUPUL DE SISTEME ELECTROMECANICE
1
Coordonator științific:Prof. Dr. Ing. Horia HEDEȘIU
Aplicații simultane de cartografiere și localizare folosind roboți mobili
Absolvent:Ádám Mihály Kis
Departamentul de Mașini și Acționări Electrice

GRUPUL DE SISTEME ELECTROMECANICE
2
Departamentul de Mașini și Acționări Electrice
Motivația lucrării:Înțelegerea și crearea unui robot capabil de a realiza SLAM (cartografiere și
localizare simultană);
Exemple
Galileo

GRUPUL DE SISTEME ELECTROMECANICE
3
Departamentul de Mașini și Acționări Electrice
Obiectivele și etapele proiectului:

GRUPUL DE SISTEME ELECTROMECANICE
4
Departamentul de Mașini și Acționări Electrice
Roboți folosiți:V1 V2
Versiunea Finală

GRUPUL DE SISTEME ELECTROMECANICE
5
Departamentul de Mașini și Acționări Electrice
Structura proiectului

GRUPUL DE SISTEME ELECTROMECANICE
6
Departamentul de Mașini și Acționări Electrice
Componentele robotului:
Creierul
Elementul de execuție
Elemente de observație

GRUPUL DE SISTEME ELECTROMECANICE
7
Departamentul de Mașini și Acționări Electrice
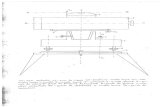
Schema de conectare:

GRUPUL DE SISTEME ELECTROMECANICE
8
Departamentul de Mașini și Acționări Electrice
Schema programului de pe myRIO

GRUPUL DE SISTEME ELECTROMECANICE
9
Departamentul de Mașini și Acționări Electrice
Programul rulat pe myRIO

GRUPUL DE SISTEME ELECTROMECANICE
10
Departamentul de Mașini și Acționări Electrice
Schema programului rulat pe calculator
Model senzorial
Model cinematic
Model a matricei de ocupare

GRUPUL DE SISTEME ELECTROMECANICE
11
Departamentul de Mașini și Acționări Electrice
Ecuații de bază a modelului senzorial

GRUPUL DE SISTEME ELECTROMECANICE
12
Departamentul de Mașini și Acționări Electrice
Ecuații de bază a localizării derivat din modelul cinematic

GRUPUL DE SISTEME ELECTROMECANICE
13
Departamentul de Mașini și Acționări Electrice
Ecuații de bază a cartografierii pe baza modelului matricei de ocupare

GRUPUL DE SISTEME ELECTROMECANICE
14
Departamentul de Mașini și Acționări Electrice
Programul rulat pe calculator

GRUPUL DE SISTEME ELECTROMECANICE
15
Departamentul de Mașini și Acționări Electrice
Reazultate localizare

GRUPUL DE SISTEME ELECTROMECANICE
16
Departamentul de Mașini și Acționări Electrice
Rezultate

GRUPUL DE SISTEME ELECTROMECANICE
17
Departamentul de Mașini și Acționări Electrice
Video

GRUPUL DE SISTEME ELECTROMECANICE
18
Departamentul de Mașini și Acționări Electrice
Concluzii
Avantajele robotului și aplicației create:•Aplicația se poate implementa ușor pe alte targeturi;•Mobilitate mare a robotului datorata conexiunii prin rețeaua wirless;•Oportunitatea de a dezvolta mai departe robotul ;
Dezavantajele robotului creat sunt următoarele: •preț destul de ridicat la componente și ne trebuie un calculator care să facă parte cel puțin din categoria mijlocie, pentru rularea aplicației fără pierderi;

GRUPUL DE SISTEME ELECTROMECANICE
19
Departamentul de Mașini și Acționări Electrice
Vă mulțumesc pentru atenția acordată!