Pertemuan 3 Elektronika Dasar New2
21
-
Upload
muhammad-allien -
Category
Documents
-
view
319 -
download
9
Transcript of Pertemuan 3 Elektronika Dasar New2
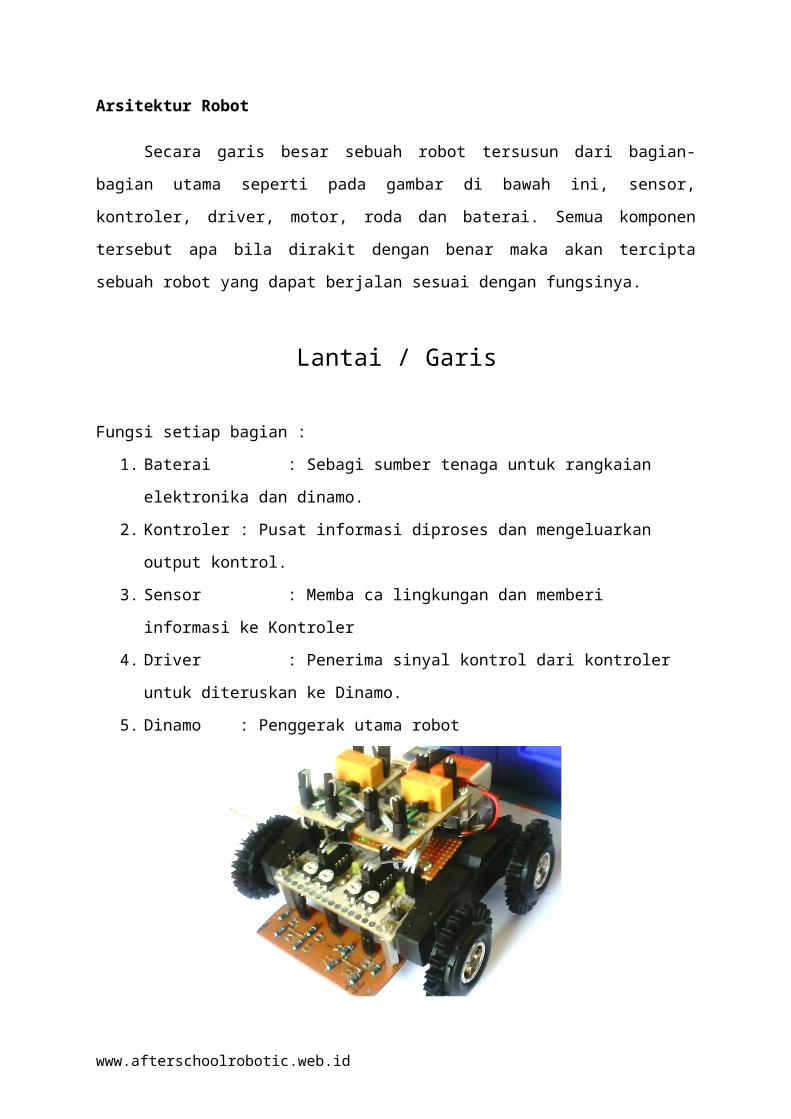
Arsitektur Robot
Secara garis besar sebuah robot tersusun dari bagian-bagian utama seperti pada
gambar di bawah ini, sensor, kontroler, driver, motor, roda dan baterai. Semua komponen
tersebut apa bila dirakit dengan benar maka akan tercipta sebuah robot yang dapat berjalan
sesuai dengan fungsinya.
Fungsi setiap bagian :
1. Baterai : Sebagi sumber tenaga untuk rangkaian elektronika dan dinamo.
2. Kontroler : Pusat informasi diproses dan mengeluarkan output kontrol.
3. Sensor : Memba ca lingkungan dan memberi informasi ke Kontroler
4. Driver : Penerima sinyal kontrol dari kontroler untuk diteruskan ke Dinamo.
5. Dinamo : Penggerak utama robot
www.afterschoolrobotic.web.id
Bodi robot / chasis
roda
Dinamo
Gearbox
DriverKontr
olerSensor
Baterai Rangkaian Elektroink
Baterai Motor
Lantai / Garis
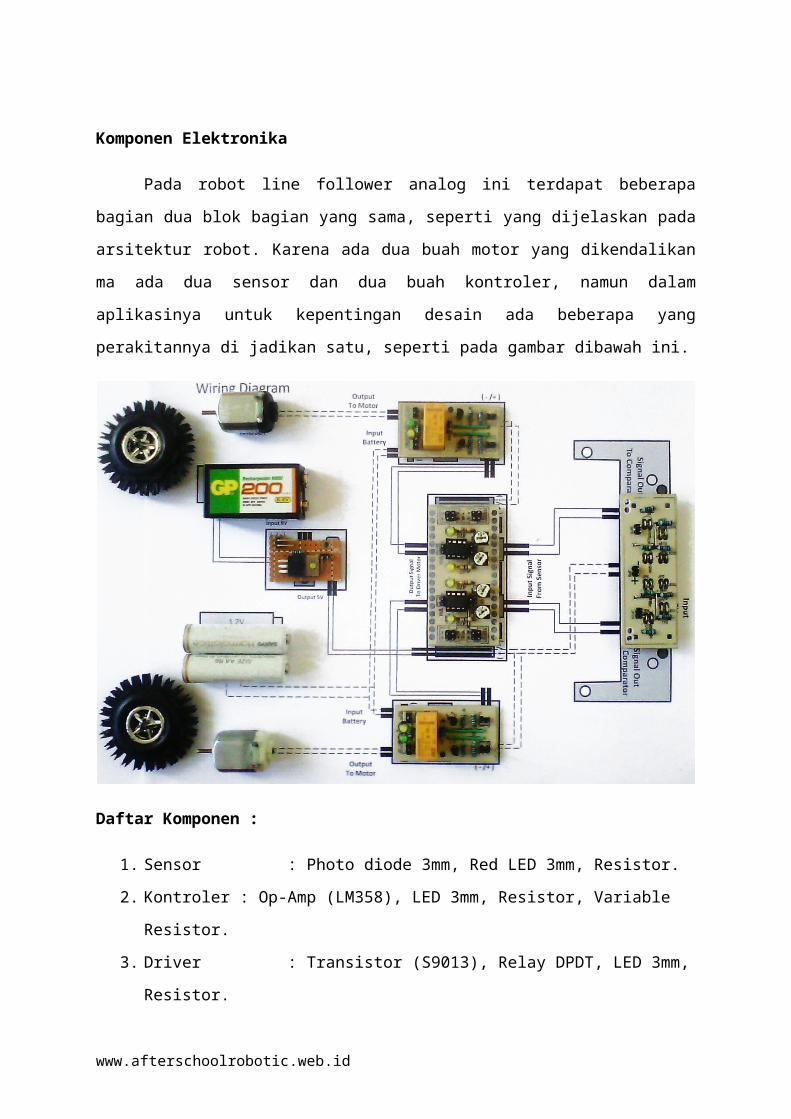
Komponen Elektronika
Pada robot line follower analog ini terdapat beberapa bagian dua blok bagian yang
sama, seperti yang dijelaskan pada arsitektur robot. Karena ada dua buah motor yang
dikendalikan ma ada dua sensor dan dua buah kontroler, namun dalam aplikasinya untuk
kepentingan desain ada beberapa yang perakitannya di jadikan satu, seperti pada gambar
dibawah ini.
Daftar Komponen :
1. Sensor : Photo diode 3mm, Red LED 3mm, Resistor.
2. Kontroler : Op-Amp (LM358), LED 3mm, Resistor, Variable Resistor.
3. Driver : Transistor (S9013), Relay DPDT, LED 3mm, Resistor.
4. Regulator 5V : IC Regulator (AN7805), LED 3mm, Resistor.
5. Baterai : 9V 200mA, 1.2V 2000mA.
6. Penggerak : Dinamo Tamiya + Roda & Gear.
7. Umum : PCB Polos, PCB Lubang, Kabel Pita, Header Cover, Pin Header, dll.
www.afterschoolrobotic.web.id
Fungsi dan Penjelasan
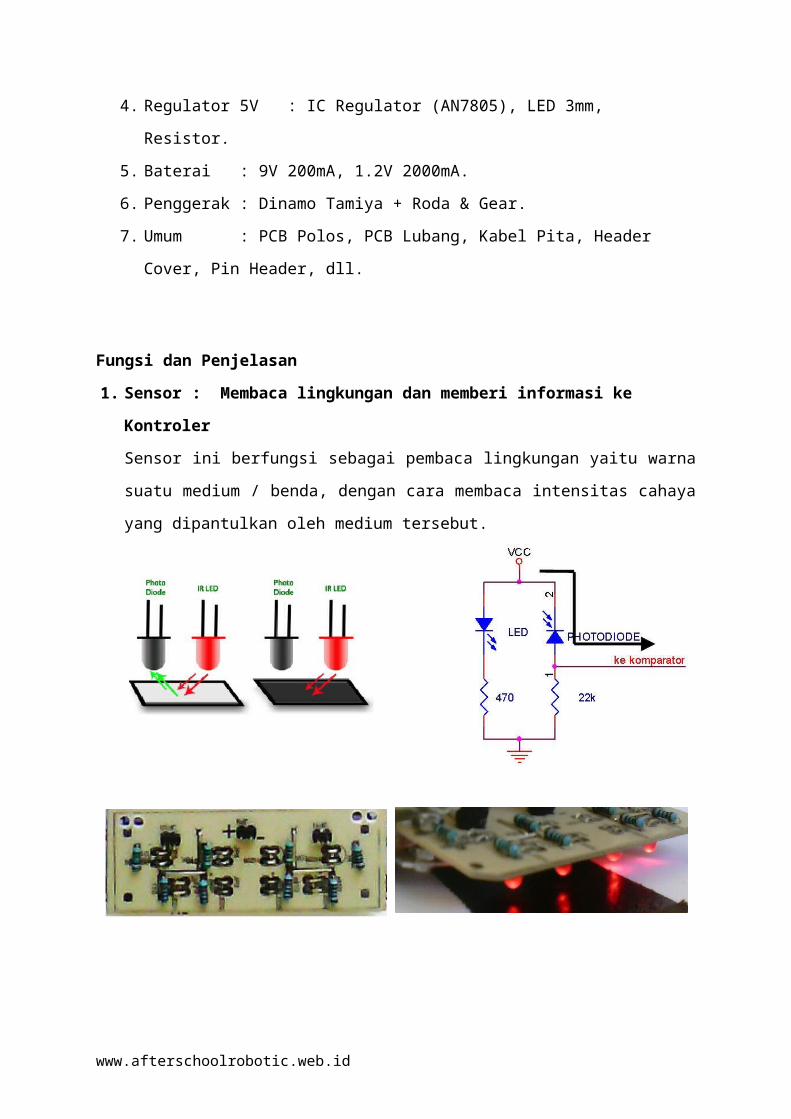
1. Sensor : Membaca lingkungan dan memberi informasi ke Kontroler
Sensor ini berfungsi sebagai pembaca lingkungan yaitu warna suatu medium / benda,
dengan cara membaca intensitas cahaya yang dipantulkan oleh medium tersebut.
Cara kerjnya adalah cahaya merah dari LED dipancarkan ke medium dan pantulan
cahaya dari medium tersebut dibaca oleh sensor cahaya Photodiode, semakin besar
intensitas cahaya yang masuk ke photodiode maka aliran tegangan dari VCC ke
komparator akan semakin besar
Komponen :
- PCB Polos sesuai ukuran 1 buah
- Resistor 470 Ω untuk LED 3mm 4 buah
- Resistor 22K Ω untuk pulldown photo dioda4 buah
- Photo dioda dan LED 3mm warna merah 4 buah
- Pin Header 2x1 3 buah
- Jumper dari potongan LED 4 buah
www.afterschoolrobotic.web.id
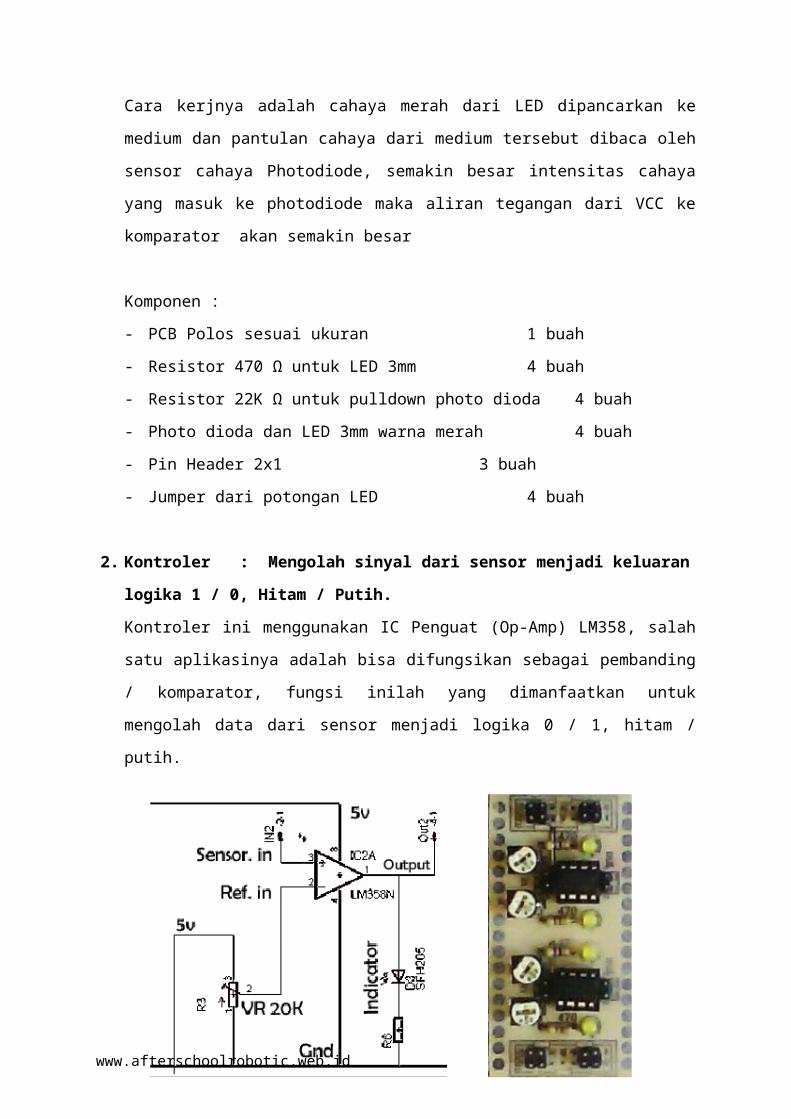
2. Kontroler : Mengolah sinyal dari sensor menjadi keluaran logika 1 / 0, Hitam / Putih.
Kontroler ini menggunakan IC Penguat (Op-Amp) LM358, salah satu aplikasinya adalah
bisa difungsikan sebagai pembanding / komparator, fungsi inilah yang dimanfaatkan
untuk mengolah data dari sensor menjadi logika 0 / 1, hitam / putih.
Cara kerjanya adalah dengan membandingkan sinyal sensor dengan sinyal referensi,
sinyal referensi inilah yang menentukan nilai minimum sinyal agar sinyal sensor
diartikan logika 1 / putih.
Komponen :
- PCB Polos sesuai ukuran 1 buah
- Resistor 470Ω untuk LED 3mm 4 buah
- Variable Resistor 20KΩ untuk referensi 4 buah
- LED 3mm warna kuning 4 buah
- IC LM358 2 buah
- Pin Header 2x1 8 buah
www.afterschoolrobotic.web.id
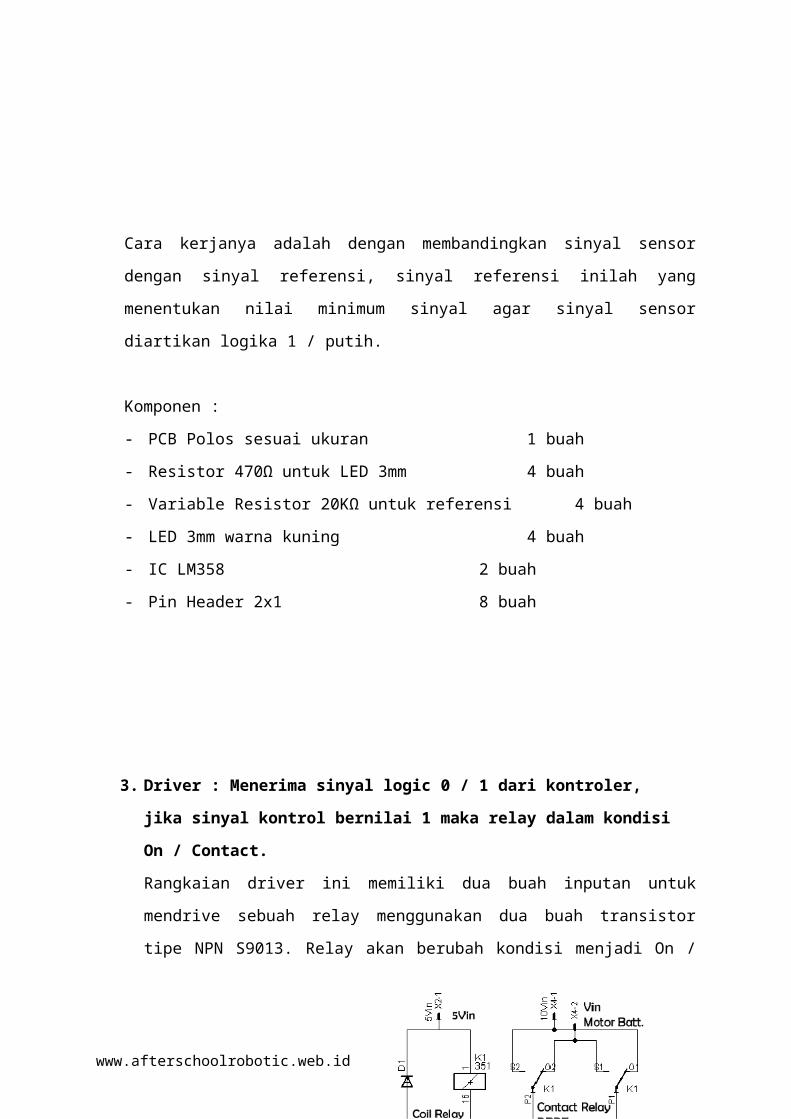
3. Driver : Menerima sinyal logic 0 / 1 dari kontroler, jika sinyal kontrol bernilai 1
maka relay dalam kondisi On / Contact.
Rangkaian driver ini memiliki dua buah inputan untuk mendrive sebuah relay
menggunakan dua buah transistor tipe NPN S9013. Relay akan berubah kondisi
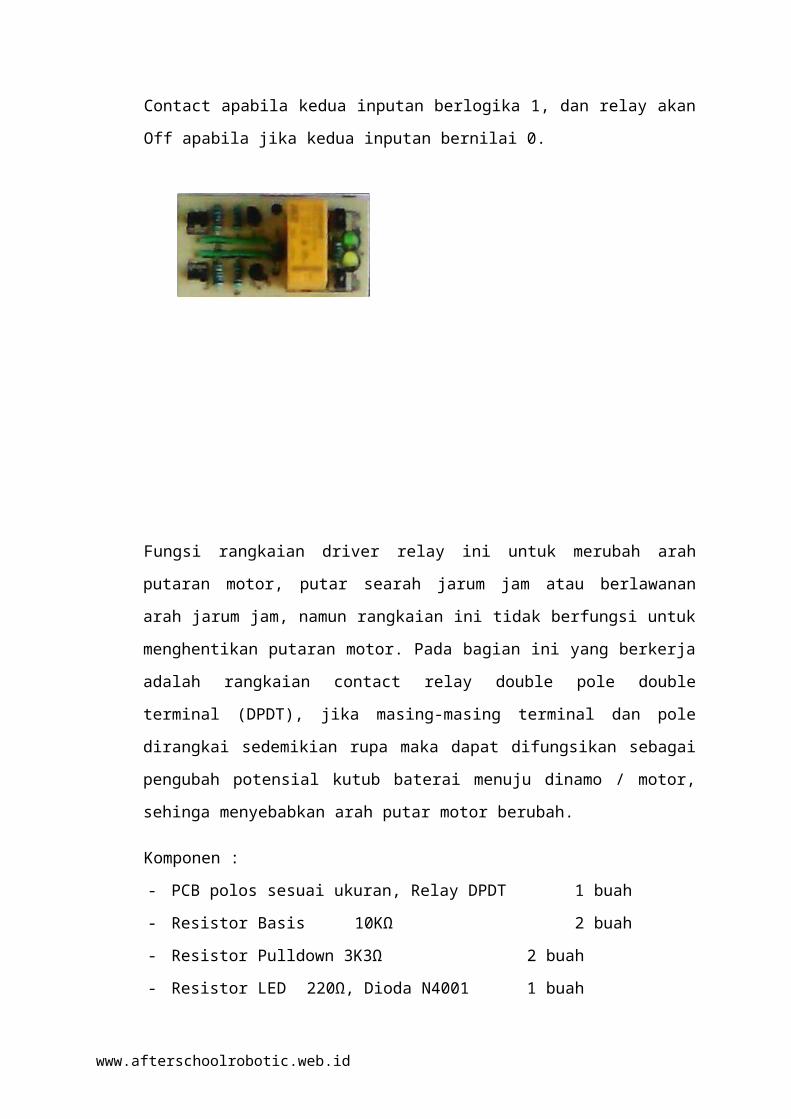
menjadi On / Contact apabila kedua inputan berlogika 1, dan relay akan Off apabila
jika kedua inputan bernilai 0.
Fungsi rangkaian driver relay ini untuk merubah arah putaran motor, putar searah
jarum jam atau berlawanan arah jarum jam, namun rangkaian ini tidak berfungsi
untuk menghentikan putaran motor. Pada bagian ini yang berkerja adalah rangkaian
contact relay double pole double terminal (DPDT), jika masing-masing terminal dan
pole dirangkai sedemikian rupa maka dapat difungsikan sebagai pengubah potensial
kutub baterai menuju dinamo / motor, sehinga menyebabkan arah putar motor
berubah.
Komponen :
- PCB polos sesuai ukuran, Relay DPDT 1 buah
- Resistor Basis 10KΩ 2 buah
- Resistor Pulldown 3K3Ω 2 buah
- Resistor LED 220Ω, Dioda N4001 1 buah
- LED, TR S9013, Kabel Jumper, Pin Header 4x1 2 buah
www.afterschoolrobotic.web.id
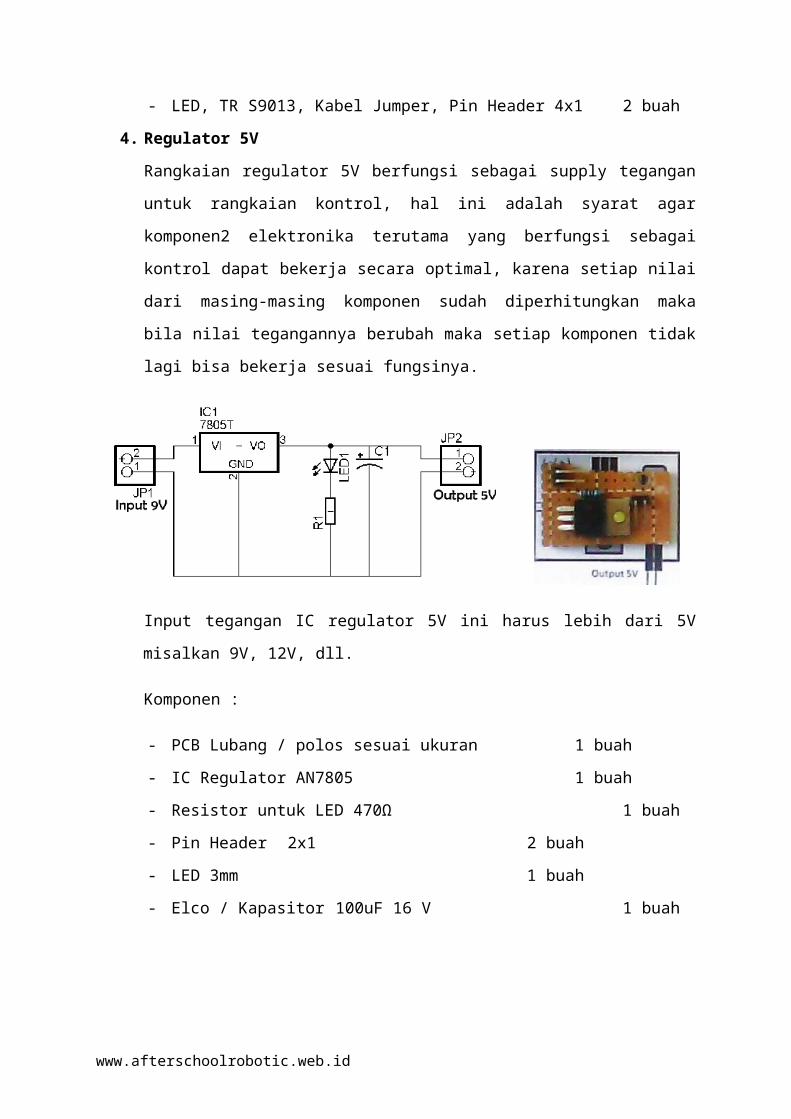
4. Regulator 5V
Rangkaian regulator 5V berfungsi sebagai supply tegangan untuk rangkaian kontrol,
hal ini adalah syarat agar komponen2 elektronika terutama yang berfungsi sebagai
kontrol dapat bekerja secara optimal, karena setiap nilai dari masing-masing
komponen sudah diperhitungkan maka bila nilai tegangannya berubah maka setiap
komponen tidak lagi bisa bekerja sesuai fungsinya.
Input tegangan IC regulator 5V ini harus lebih dari 5V misalkan 9V, 12V, dll.
Komponen :
- PCB Lubang / polos sesuai ukuran 1 buah
- IC Regulator AN7805 1 buah
- Resistor untuk LED 470Ω 1 buah
- Pin Header 2x1 2 buah
- LED 3mm 1 buah
- Elco / Kapasitor 100uF 16 V 1 buah
www.afterschoolrobotic.web.id
5. Baterai : Sumber energi untuk rangkaian elektronika dan dinamo
Ada dua buah baterai yang digunakan dalam robot ini, yaitu baterai dengan
tegangan 8.4 V kapasitas 200mAh dan baterai AA 1.2V dengan kapasitas 2000mAh.
- Baterai GP 8.4V 200mAh digunakan untuk supply energi rangkaian kontrol.
- Baterai Sanyo AA 1.2V 2000mAh digunakan untuk supply energi dinamo motor.
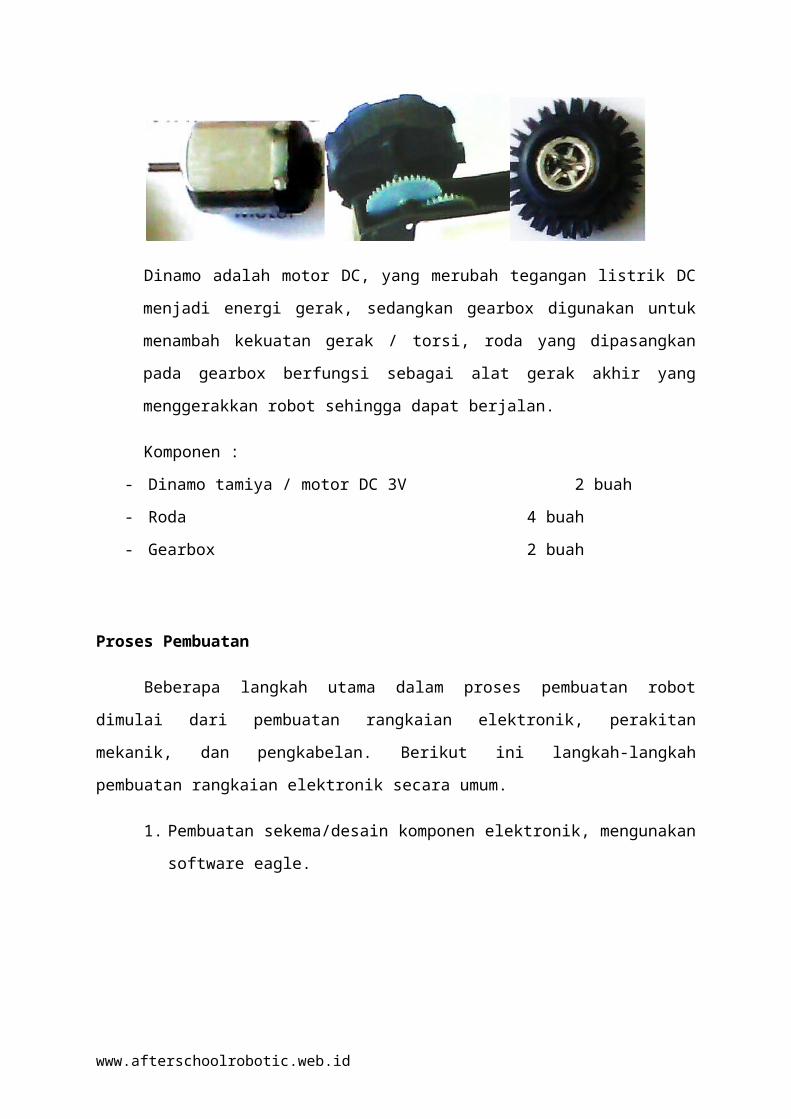
6. Penggerak : Dinamo Tamiya + Roda & Gear.
Komponen penggerak berupa dinamo tamiya, roda dan gear adalah komponen
utama dalam proses gerak robot, komponen yang dikontrol kontroler melalui driver
berdasarkan pembacaan sensor.
Dinamo adalah motor DC, yang merubah tegangan listrik DC menjadi energi gerak,
sedangkan gearbox digunakan untuk menambah kekuatan gerak / torsi, roda yang
dipasangkan pada gearbox berfungsi sebagai alat gerak akhir yang menggerakkan
robot sehingga dapat berjalan.
Komponen :
- Dinamo tamiya / motor DC 3V 2 buah
- Roda 4 buah
- Gearbox 2 buah
www.afterschoolrobotic.web.id
Proses Pembuatan
Beberapa langkah utama dalam proses pembuatan robot dimulai dari pembuatan
rangkaian elektronik, perakitan mekanik, dan pengkabelan. Berikut ini langkah-langkah
pembuatan rangkaian elektronik secara umum.
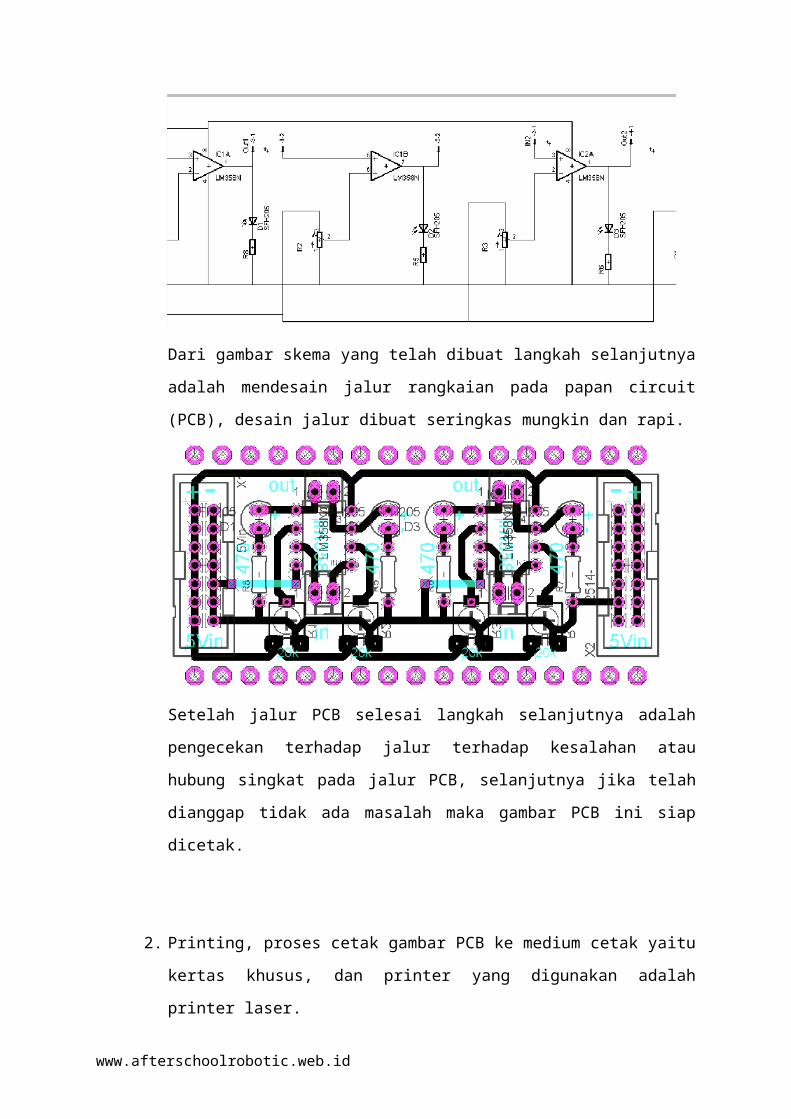
1. Pembuatan sekema/desain komponen elektronik, mengunakan software eagle.
Dari gambar skema yang telah dibuat langkah selanjutnya adalah mendesain
jalur rangkaian pada papan circuit (PCB), desain jalur dibuat seringkas mungkin
dan rapi.
Setelah jalur PCB selesai langkah selanjutnya adalah pengecekan terhadap jalur
terhadap kesalahan atau hubung singkat pada jalur PCB, selanjutnya jika telah
dianggap tidak ada masalah maka gambar PCB ini siap dicetak.
www.afterschoolrobotic.web.id
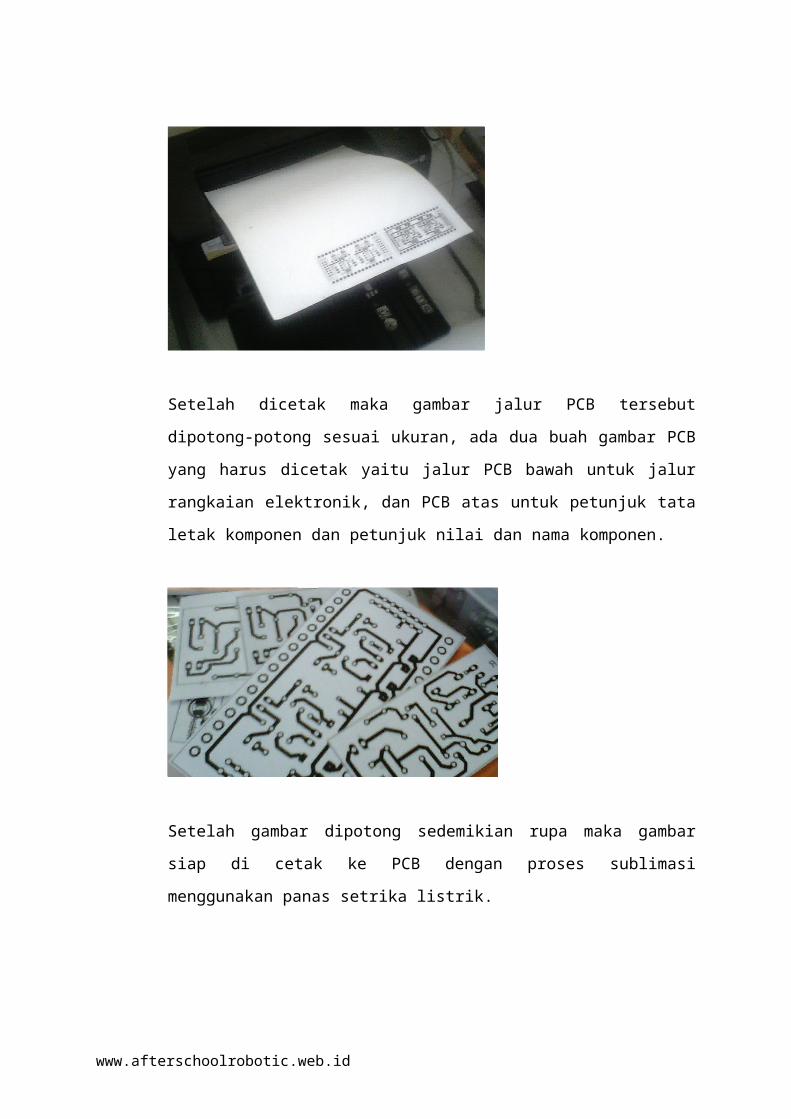
2. Printing, proses cetak gambar PCB ke medium cetak yaitu kertas khusus, dan
printer yang digunakan adalah printer laser.
Setelah dicetak maka gambar jalur PCB tersebut dipotong-potong sesuai ukuran,
ada dua buah gambar PCB yang harus dicetak yaitu jalur PCB bawah untuk jalur
rangkaian elektronik, dan PCB atas untuk petunjuk tata letak komponen dan
petunjuk nilai dan nama komponen.
Setelah gambar dipotong sedemikian rupa maka gambar siap di cetak ke PCB
dengan proses sublimasi menggunakan panas setrika listrik.
www.afterschoolrobotic.web.id
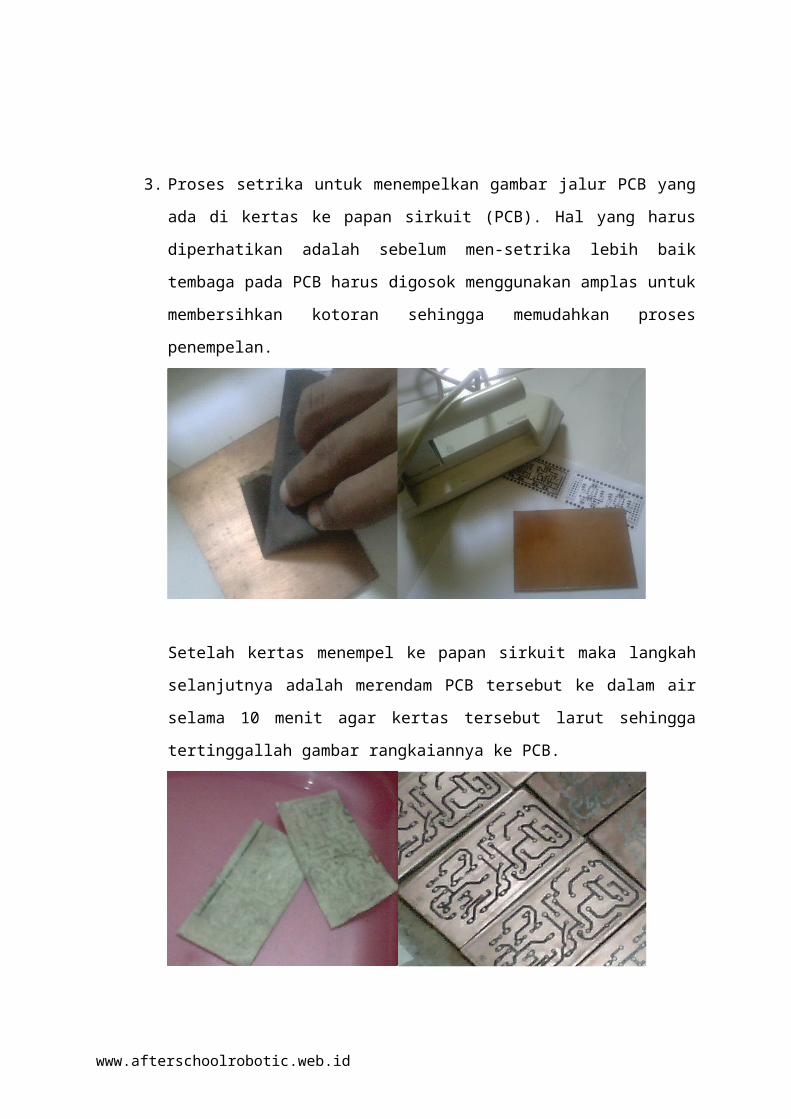
3. Proses setrika untuk menempelkan gambar jalur PCB yang ada di kertas ke papan
sirkuit (PCB). Hal yang harus diperhatikan adalah sebelum men-setrika lebih baik
tembaga pada PCB harus digosok menggunakan amplas untuk membersihkan
kotoran sehingga memudahkan proses penempelan.
Setelah kertas menempel ke papan sirkuit maka langkah selanjutnya adalah
merendam PCB tersebut ke dalam air selama 10 menit agar kertas tersebut larut
sehingga tertinggallah gambar rangkaiannya ke PCB.
Setelah dilakukan proses pemindahan gambar ke papan sirkuit (PCB) maka
tahap selanjutnya adalah proses etching, yaitu menghilangkan tembaga yang
tidak terkena gambar jalur PCB menggunakan larutan kimia ferric cloride.
www.afterschoolrobotic.web.id
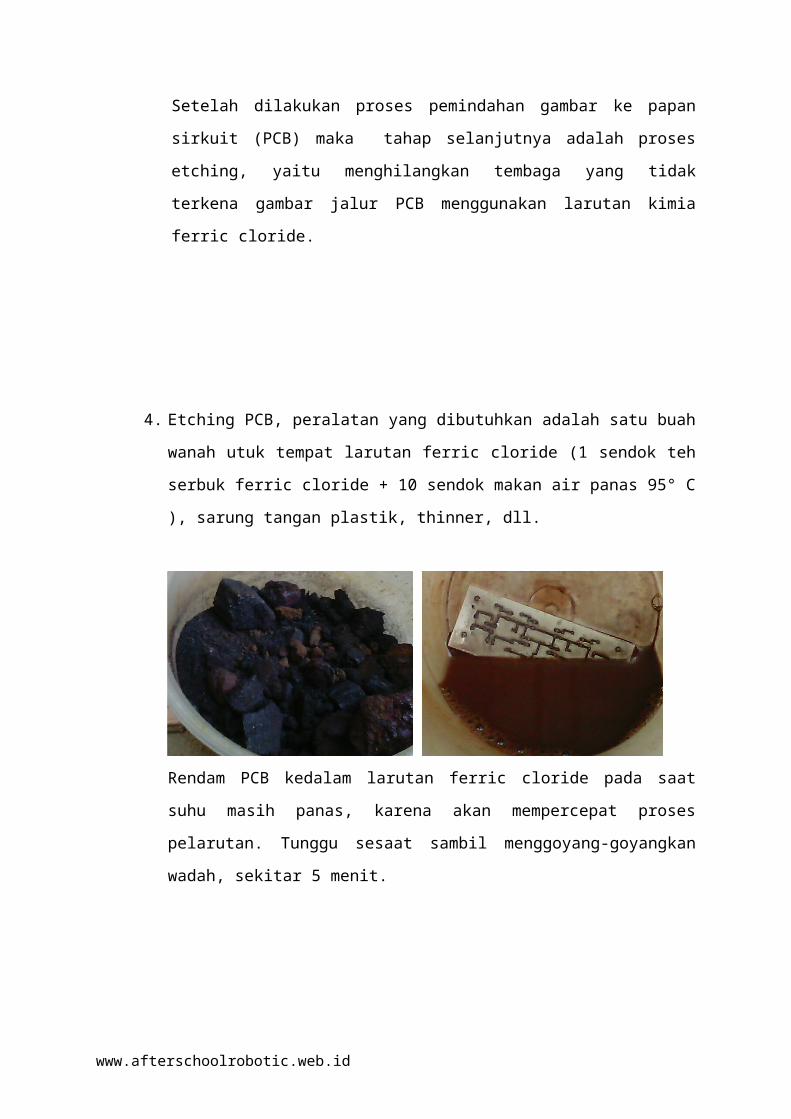
4. Etching PCB, peralatan yang dibutuhkan adalah satu buah wanah utuk tempat
larutan ferric cloride (1 sendok teh serbuk ferric cloride + 10 sendok makan air
panas 95° C ), sarung tangan plastik, thinner, dll.
Rendam PCB kedalam larutan ferric cloride pada saat suhu masih panas, karena
akan mempercepat proses pelarutan. Tunggu sesaat sambil menggoyang-
goyangkan wadah, sekitar 5 menit.
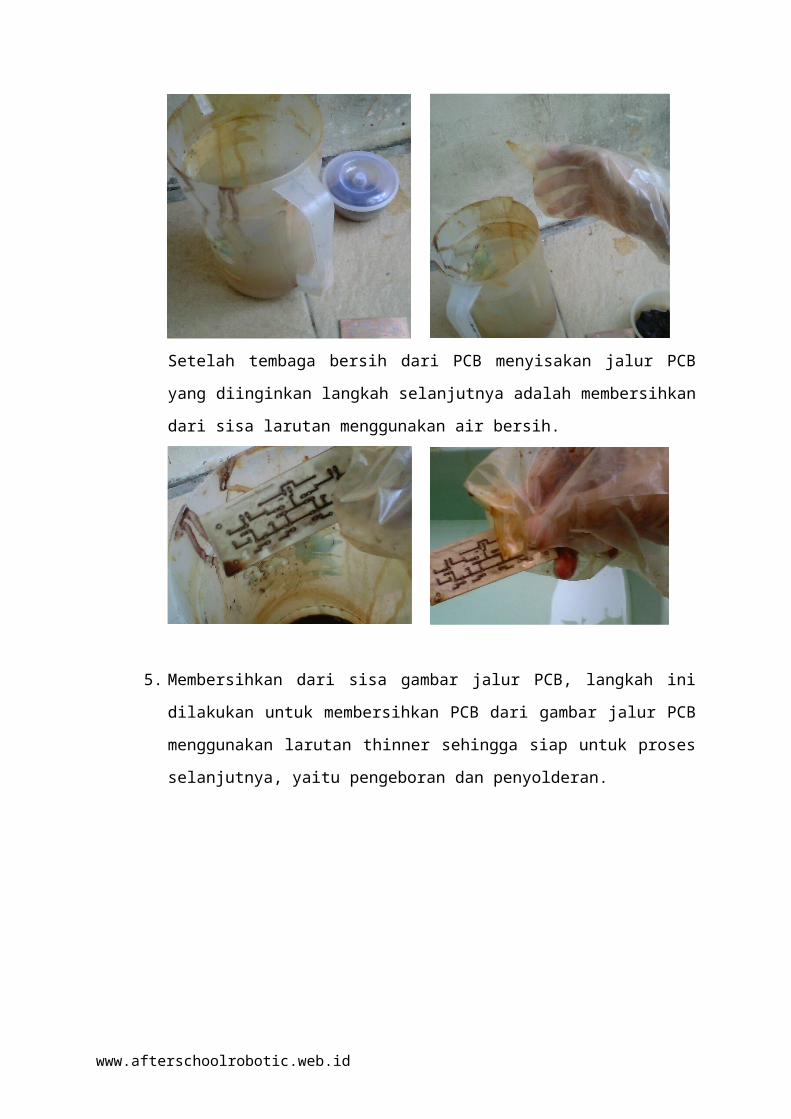
Setelah tembaga bersih dari PCB menyisakan jalur PCB yang diinginkan langkah
selanjutnya adalah membersihkan dari sisa larutan menggunakan air bersih.
www.afterschoolrobotic.web.id
5. Membersihkan dari sisa gambar jalur PCB, langkah ini dilakukan untuk
membersihkan PCB dari gambar jalur PCB menggunakan larutan thinner sehingga
siap untuk proses selanjutnya, yaitu pengeboran dan penyolderan.
\
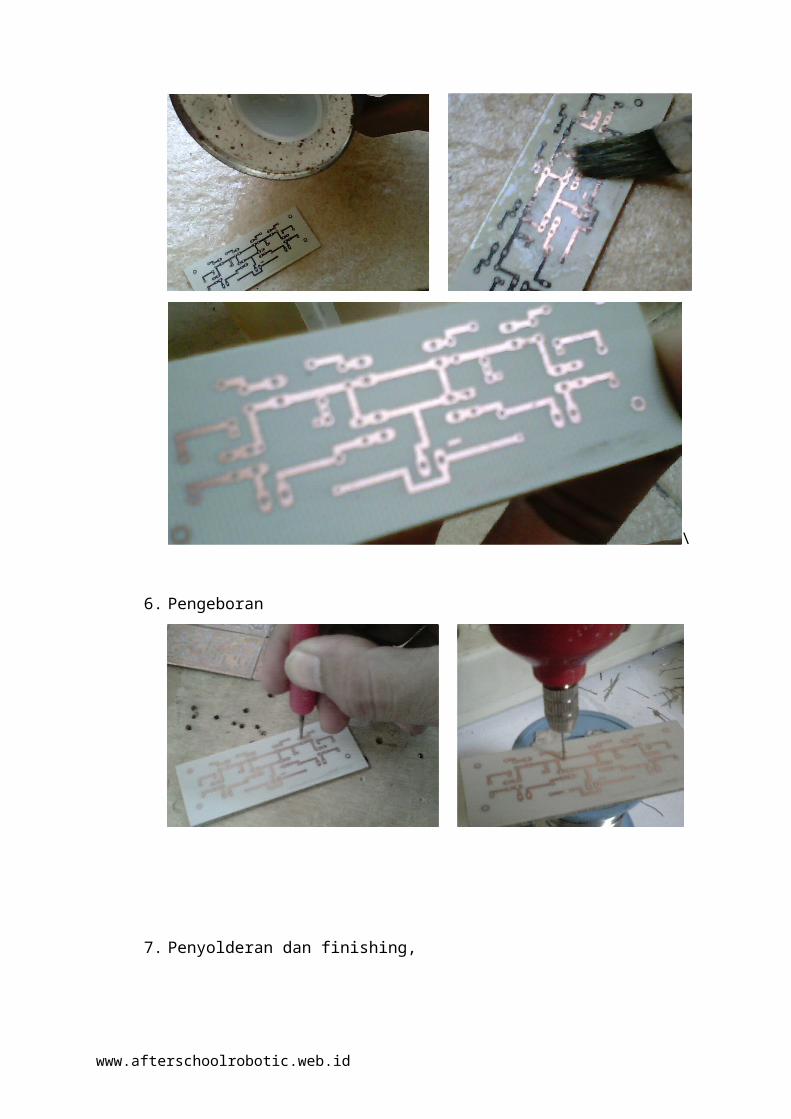
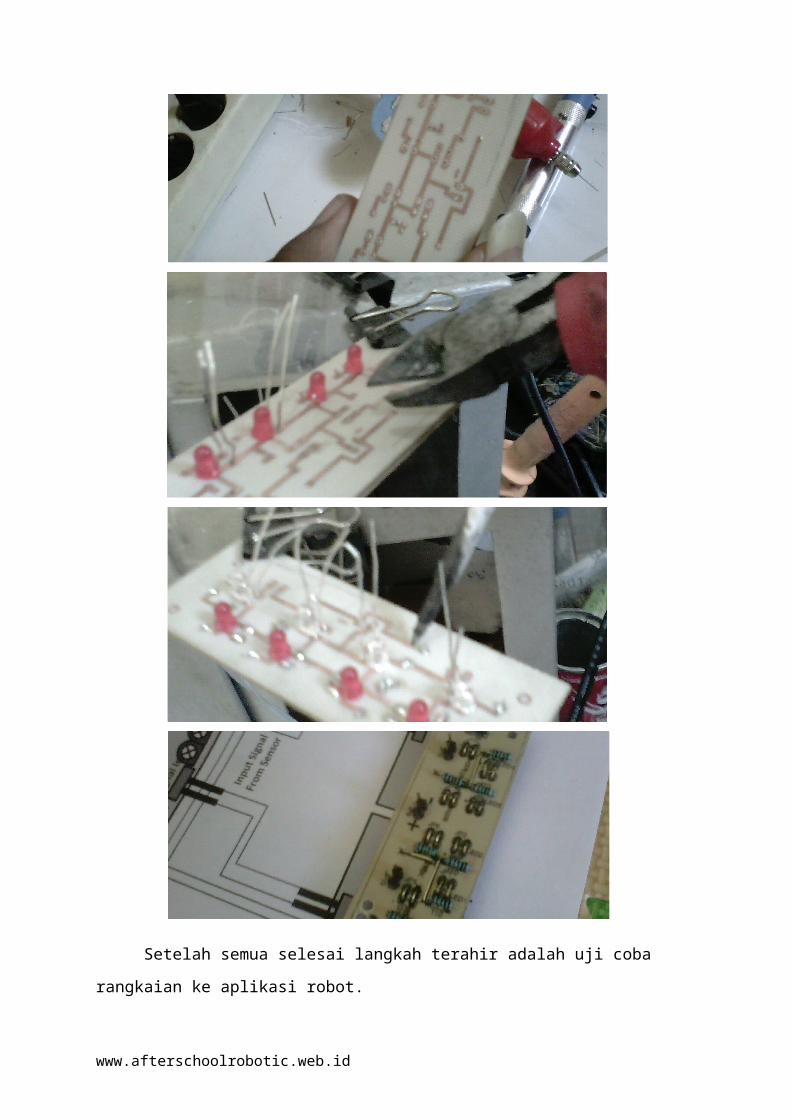
6. Pengeboran
7. Penyolderan dan finishing,
www.afterschoolrobotic.web.id
Setelah semua selesai langkah terahir adalah uji coba rangkaian ke aplikasi robot.
Diagram Pengkabelan
www.afterschoolrobotic.web.id
www.afterschoolrobotic.web.id
Proses Perakitan dan Uji Coba
www.afterschoolrobotic.web.id
www.afterschoolrobotic.web.id