PEMODELAN MASALAH EKOLOGI DENGAN ...masalah kompetisi antara dua populasi yang dimodelkan secara...
98
i PEMODELAN MASALAH EKOLOGI DENGAN PERSAMAAN LOTKA- VOLTERRA TERMODIFIKASI DAN PENYELESAIAN NUMERISNYA MENGGUNAKAN METODE BEDA HINGGA EKSAK Skripsi Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains Program Studi Matematika Oleh: Especially Angelina Kono NIM: 153114027 PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS SANATA DHARMA YOGYAKARTA 2019 PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
Transcript of PEMODELAN MASALAH EKOLOGI DENGAN ...masalah kompetisi antara dua populasi yang dimodelkan secara...

i
PEMODELAN MASALAH EKOLOGI DENGAN PERSAMAAN LOTKA-
VOLTERRA TERMODIFIKASI DAN PENYELESAIAN NUMERISNYA
MENGGUNAKAN METODE BEDA HINGGA EKSAK
Skripsi
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Oleh:
Especially Angelina Kono
NIM: 153114027
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2019
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ii
MODELING OF ECOLOGY PROBLEMS WITH MODIFIED LOTKA-
VOLTERRA EQUATIONS AND THEIR NUMERICAL SOLUTIONS
USING EXACT FINITE DIFFERENCE METHODS
Thesis
Presented as a Partial Fulfillment of the Requirements
to Obtain the Degree of Sarjana Sains
in Mathematics
By:
Especially Angelina Kono
NIM: 153114027
MATHEMATICS STUDY PROGRAM
DEPARTMENT OF MATHEMATICS
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2019
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vii
HALAMAN PERSEMBAHAN
“You can’t go back and change the beginning, but you can start where you are
and change the ending”. -C. S. Lewis-
“Nothing is permanent so you should love what you got”. -Thiru Kumar-
Skripsi ini saya persembahkan untuk Tuhan Yang Maha Esa yang selalu
memberkati saya, kedua orang tua tercinta dan kakak saya terkasih, dan juga
untuk semua orang yang selalu mendoakan saya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

viii
ABSTRAK
Skripsi ini membahas tentang penyelesaian suatu masalah ekologi khususnya
masalah kompetisi antara dua populasi yang dimodelkan secara matematis ke dalam
bentuk persamaan diferensial yaitu, persamaan diferensial Lotka-Volterra
termodifikasi. Persamaan diferensial Lotka-Volterra termodifikasi merupakan
suatu sistem persamaan diferensial biasa nonlinear orde satu. Metode numerik yang
digunakan dalam skripsi ini adalah metode beda hingga eksak yang merupakan
salah satu metode beda hingga tak standar. Penyelesaian yang dihasilkan oleh
metode beda hingga eksak ini akan disimulasikan dan dibandingkan dengan dua
metode lain, yaitu metode Euler dan metode Heun.
Setelah dilakukan simulasi diperoleh bahwa metode beda hingga eksak
memiliki hasil yang lebih akurat dan yang paling mendekati penyelesaian eksaknya.
Hasil simulasi tersebut menunjukkan bahwa seiring dengan membesarnya waktu (t)
laju pertumbuhan dari kedua populasi semakin menurun.
Kata Kunci: Persamaan diferensial, persamaan diferensial Lotka-Volterra
termodifikasi, metode beda hingga eksak, metode beda hingga nonstandar.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ix
ABSTRACT
This thesis discusses the solution of an ecological problem especially the
problem of competition between two populations which are mathematically
modeled into the form of differential equations, namely, modified Lotka-Volterra
differential equations. The modified Lotka-Volterra differential equations are a
system of first-order nonlinear ordinary differential equations. The numerical
method used in this paper is the exact finite difference method which is one of
nonstandard finite difference methods. The solutions produced by this exact finite
difference method will be simulated and compared with two other methods, namely,
the Euler’s method and the Heun’s method.
After the simulation is obtained, the exact finite difference method has more
accurate results and the closest to the exact solution. The results of this simulation
show that as time (t) increases the growth rate of the two populations decreases.
Keywords: Differential equations, modified Lotka-Volterra differential equations,
exact finite difference methods, nonstandard finite difference methods.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
KATA PENGANTAR
Puji dan Syukur saya ucapkan kepada Tuhan Yesus karena dengan kuasa
dan rahmat-Nyalah saya dapat menyelesaikan skripsi ini dengan tepat waktu.
Skripsi ini dibuat dengan tujuan memenuhi syarat untuk memperoleh gelar
Sarjana Sains pada Program Studi Matematika, Fakultas Sains dan Teknologi,
Universitas Sanata Dharma.
Penulis menyadari bahwa penulis melibatkan banyak pihak yang bersedia
membantu dalam menghadapi berbagai macam kesulitan, tantangan dan
hambatan. Oleh karena itu pada kesempatan ini penulis mengucapkan terima
kasih kepada:
1. Bapak Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D., selaku Dekan Fakultas
Sains dan Teknologi dan selaku Dosen Pembimbing Akademik dan juga
dosen pembimbing skripsi.
2. Bapak Hartono, S.Si., M.Sc., Ph.D., selaku Kaprodi Matematika.
3. Romo Prof. Dr. Frans Susilo, SJ., Bapak Ir. Ig. Aris Dwiatmoko, M.Sc,
Bapak Dr. rer. nat. Herry P. Suryawan, S.Si., M.Si. dan Ibu M. V. Any
Herawati, S.Si., M.Si., selaku dosen-dosen Prodi Matematika yang telah
membimbing dan memberikan banyak pengetahuan kepada penulis selama
proses perkuliahan.
4. Bapak/Ibu dosen/karyawan Fakultas Sains dan Teknologi yang telah
berdinamika bersama selama penulis berkuliah.
5. Kedua orang tua tercinta, Bapak Alex dan Mama Erna dan juga Kakak Dodi
yang selalu memberi semangat dan dukungan kepada penulis selama proses
perkuliahan dan pengerjaan skripsi.
6. Teman-teman Prodi Matematika Angkatan 2015: Rani, Fithri, Edhi, Rio,
Yion, Yofi, Ayu, Sasmi, Laura, Florens, Devi, Lya, Sapi, Ana dan Priska.
Khususnya Putri, Brigit, Vania dan Arel yang selalu membantu, memberi
masukan dan memberi semangat kepada penulis dalam proses pengerjaan
skripsi dan berjuang bersama selama kuliah empat tahun. Terima kasih telah
membagikan begitu banyak ilmu dan cerita yang kalian miliki.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xii
DAFTAR ISI
HALAMAN JUDUL .................................................................................................... i
HALAMAN PERSETUJUAN DOSEN PEMBIMBING ........................................ iii
HALAMAN PENGESAHAN ....................................................................................iv
PERNYATAAN KEASLIAN KARYA ..................................................................... v
PERNYATAAN PERSETUJUAN ............................................................................vi
HALAMAN PERSEMBAHAN ................................................................................vii
ABSTRAK ................................................................................................................ viii
ABSTRACT ................................................................................................................ix
KATA PENGANTAR ................................................................................................. x
DAFTAR ISI ..............................................................................................................xii
DAFTAR GAMBAR ................................................................................................. xv
DAFTAR TABEL .................................................................................................... xvii
BAB I PENDAHULUAN ........................................................................................... 1
A. Latar belakang ..................................................................................... 1
B. Rumusan Masalah ................................................................................ 3
C. Batasan Masalah .................................................................................. 3
D. Tujuan Penulisan ................................................................................. 3
E. Manfaat Penulisan ................................................................................ 3
F. Metode Penulisan ................................................................................. 3
G. Sistematika Penulisan .......................................................................... 3
BAB II PERSAMAAN DIFERENSIAL DAN TURUNAN NUMERIK ............... 5
A. Turunan ............................................................................................... 5
B. Persamaan Diferensial .......................................................................... 7
1. Definisi Persamaan Diferensial ....................................................... 7
2. Klasifikasi Persamaan Diferensial ................................................... 7
C. Fungsi Bebas Linear dan Bergantung Linear ...................................... 10
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiii
E. Determinan Matriks ........................................................................... 12
1. Determinan Matriks 2 × 2 ............................................................ 12
2. Determinan Matriks n × n ............................................................ 13
F. Nilai Eigen ......................................................................................... 14
G. Turunan Numerik ............................................................................... 15
1. Pendekatan Turunan Orde Satu Menggunakan Beda Maju ............ 16
2. Pendekatan Turunan Orde Satu Menggunakan Beda Mundur ........ 17
3. Pendekatan Turunan Orde Satu Menggunakan Beda Tengah......... 18
H. Metode Euler ..................................................................................... 19
I. Metode Heun ..................................................................................... 20
J. Metode Biseksi .................................................................................. 22
BAB III SISTEM PERSAMAAN DIFERENSIAL LOTKA-VOLTERRA
TERMODIFIKASI DAN METODE BEDA HINGGA EKSAK ............................ 24
A. Sistem Persamaan Lotka-Volterra Termodifikasi ............................... 24
1. Persamaan Diferensial Lotka-Volterra .......................................... 24
2. Persamaan Diferensial Lotka-Volterra Termodifikasi.................... 26
B. Metode Beda Hingga Eksak ............................................................... 27
1. Skema Beda Hingga Eksak ........................................................... 28
2. Contoh Skema Beda Hingga Eksak ............................................... 30
3. Aturan Pemodelan Beda Hingga Nonstandar................................. 39
4. Perbandingan Penyelesaian ........................................................... 40
BAB IV PENYELESAIAN NUMERIS SISTEM PERSAMAAN DIFERENSIAL
LOTKA-VOLTERRA TERMODIFKASI ............................................................... 50
A. Penyelesaian Numeris Sistem Persamaan Diferensial Lotka-Volterra
Termodifikasi dengan Metode Beda Hingga Eksak ............................ 50
B. Simulasi Numeris ............................................................................... 58
C. Pembahasan Hasil Simulasi ................................................................ 68
BAB V PENUTUP .................................................................................................... 69
A. Kesimpulan ........................................................................................ 69
B. Saran.................................................................................................. 70
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xiv
DAFTAR PUSTAKA ................................................................................................ 71
LAMPIRAN PROGRAM .......................................................................................... 73
1. Program Bab III ................................................................................. 73
2. Program Bab IV ................................................................................. 76
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xv
DAFTAR GAMBAR
Gambar 2.1.1 Grafik ilustrasi pendekatan turunan orde satu
dengan beda maju. .................................................................... 17
Gambar 2.1.2 Grafik ilustrasi pendekatan turunan orde satu dengan beda
mundur. ................................................................................... 18
Gambar 2.1.3 Grafik ilustrasi pendekatan turunan orde satu
dengan beda tengah. .................................................................. 19
Gambar 3.4.1 Grafik simulasi numeris persamaan (3.56) dengan menggunakan
metode Euler, metode Heun dan metode beda hingga eksak
dengan 𝑦(0) = 1 dan 𝛥𝑡 = 0.1. ................................................ 40
Gambar 3.4.2 Grafik simulasi numeris persamaan (3.56) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 0.585, 0.615 dan
0.468, 0.502. ............................................................................ 41
Gambar 3.4.3 Grafik simulasi numeris persamaan (3.57) dengan menggunakan
metode beda hingga standar dan metode beda hingga eksak
dengan 𝑦(0) = 1, 𝑦′(0) = 1, dan 𝛥𝑡 = 0.1. ............................. 43
Gambar 3.4.4 Grafik simulasi numeris persamaan (3.57) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 1.39, 1.415 dan
0.59, 0.95.................................................................................. 44
Gambar 3.4.5 Grafik simulasi numeris persamaan (3.58) dengan menggunakan
metode Euler, metode Heun dan metode beda hingga eksak
dengan 𝑦(0) = 1, 𝛥𝑡 = 0.1 dan 𝜆1 = 1 dan 𝜆2 = 2. ................. 47
Gambar 3.4.6 Grafik simulasi numeris persamaan (3.58) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 0.68, 0.76 dan
0.35, 0.65.................................................................................. 48
Gambar 4.1.1 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝛥𝑡 = 0.1. .............................................................. 60
Gambar 4.1.2 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝛥𝑡 = 0.01. ............................................................ 61
Gambar 4.1.3 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝑡 = 0 sampai 𝑡 = 10, dan 𝛥𝑡 = 0.01. .................. 62
Gambar 4.1.4 Grafik penyelesaian persamaan (4.1) dengan menggunakan metode
Euler dengan 𝛥𝑡 = 0.1. ............................................................. 63
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvi
Gambar 4.1.5 Grafik penyelesaian metode Euler untuk persamaan (4.1) dengan
𝑡 = 0 sampai 𝑡 = 10 dan 𝛥𝑡 = 0.01. ....................................... 64
Gambar 4.1.6 Grafik penyelesaian persamaan (4.1) dengan menggunakan metode
Heun dengan 𝛥𝑡 = 0.1 .............................................................. 66
Gambar 4.1.7 Grafik penyelesaian metode Heun untuk persamaan (4.1) dengan
𝑡 = 0 sampai 𝑡 = 10 dan 𝛥𝑡 = 0.01. ....................................... 67
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

xvii
DAFTAR TABEL
Tabel 3.4.1 Error hasil perhitungan dari persamaan (3.56) ................................. 43
Tabel 3.4.2 Error hasil perhitungan dari persamaan (3.57) ................................. 46
Tabel 3.4.3 Error hasil perhitungan dari persamaan (3.58) ................................. 49
Tabel 4.1.1 Hasil perhitungan dari persamaan (4.48) dengan ∆𝑡 = 0.1 .............. 60
Tabel 4.1.2 Hasil perhitungan dari persamaan (4.53) dengan ∆𝑡 = 0.1 .............. 64
Tabel 4.1.3. Hasil perhitungan dari persamaan (4.54) dengan ∆𝑡 = 0.1 ............. 67
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

1
BAB I
PENDAHULUAN
Pada bab ini akan dibahas latar belakang, rumusan masalah, batasan masalah,
tujuan penulisan, manfaat penulisan, metode penulisan, dan juga sistematika
penulisan.
A. Latar belakang
Matematika merupakan salah satu ilmu pengetahuan yang banyak diterapkan
dalam kehidupan sehari-hari dan juga diterapkan dalam berbagai bidang ilmu
pengetahuan, salah satunya adalah dalam bidang biologi. Contoh penerapan
matematika dalam bidang biologi adalah pada masalah ekologi. Ekologi merupakan
cabang ilmu biologi yang mempelajari tentang populasi dan komunitas yang terdiri
atas manusia, hewan, dan tumbuhan serta interaksinya satu sama lain dan juga
interaksinya dengan lingkungan sekitar.
Masalah ekologi sudah dimodelkan ke dalam bentuk matematis, contohnya
adalah model mangsa-pemangsa dan model Lotka-Volterra. Kedua model ini sering
digunakan untuk menyelesaikan masalah-masalah nyata seperti hubungan dinamis
antara zebra dan kelinci, kompetisi di pasar, total permintaan produk di pasar
(Gorvett, 2014), dan masalah-masalah nyata lainnya. Model mangsa-pemangsa dan
model Lotka-Volterra ini berupa persamaan diferensial.
Persamaan diferensial adalah persamaan yang menyatakan hubungan antara
suatu fungsi dengan turunan-turunannya. Persamaan diferensial ini dapat dibedakan
menjadi dua berdasarkan banyak variabel bebasnya, yaitu persamaan diferensial
biasa, dan persamaan diferensial parsial. Dalam skripsi ini akan dibahas persamaan
diferensial biasa yang merupakan model dari masalah kompetisi.
Persamaan diferensial biasa adalah persamaan diferensial yang hanya memuat
satu variabel bebas. Salah satu persamaan diferensial yang menyatakan model
mangsa-pemangsa, kompetisi, dan mutualisme adalah persamaan diferensial Lotka-
Volterra (Mickens, 2018). Skripsi ini akan membahas persamaan diferensial Lotka-
Volterra yang termodifikasi dan penyelesaian numerisnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
Persamaan diferensial Lotka-Volterra terdiri atas sepasang persamaan
diferensial nonlinear orde satu, yang sering digunakan untuk menggambarkan dua
populasi yang berinteraksi. Persamaan diferensial Lotka-Volterra termodifikasi
juga terdiri atas sepasang persamaan diferensial nonlinear orde satu. Bentuk dari
persamaan diferensial Lotka-Volterra adalah
𝑑𝑥
𝑑𝑡= 𝑟1𝑥 − 𝑎11𝑥
2 − 𝑎12𝑥𝑦,
𝑑𝑦
𝑑𝑡= 𝑟2𝑦 − 𝑎21𝑥𝑦 − 𝑎22𝑦
2,
dan bentuk dari persamaan diferensial Lotka-Volterra termodifikasi yang akan
dibahas dalam skripsi ini adalah
𝑑𝑥
𝑑𝑡= 𝑟1√𝑥 − 𝑎11𝑥 − 𝑎12√𝑥√𝑦 ,
𝑑𝑦
𝑑𝑡= 𝑟2√𝑦 − 𝑎21√𝑥√𝑦 − 𝑎22𝑦,
dimana 𝑟1, 𝑟2, 𝑎11, 𝑎22, 𝑎12, 𝑎21 adalah parameter konstan, dan x(t) dan y(t) adalah
variabel terikat (Mickens, 2018).
Tidak semua persamaan diferensial mudah diselesaikan secara analitis. Banyak
persamaan diferensial yang sulit untuk diselesaikan secara analitis, salah satu
contohnya adalah model dari persamaan diferensial Lotka-Volterra termodifikasi
yang merupakan persamaan diferensial nonlinear.
Meskipun demikian, persamaan diferensial Lotka-Volterra termodifikasi dapat
diselesaikan dengan metode numeris. Ada beberapa metode numeris yang dapat
digunakan untuk menyelesaiakan persamaan diferensial Lotka-Volterra
termodifikasi misalnya metode Euler, Heun, beda hingga, beda hingga eksak, dan
metode-metode lainnya. Skripsi ini akan menggunakan metode beda hingga eksak
untuk menyelesaikan persamaan diferensial Lotka-Volterra termodifikasi. Metode
beda hingga eksak ini akan menghasilkan suatu skema numerik dengan
menggunakan beda hingga maju.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

3
B. Rumusan Masalah
Rumusan masalah dalam skripsi adalah:
1. Bagaimana mengkonstruksi metode beda hingga eksak untuk suatu
persamaan diferensial?
2. Bagaimana menyelesaikan sistem persamaan diferensial Lotka-Volterra
termodifikasi secara numeris menggunakan metode beda hingga eksak?
C. Batasan Masalah
Dalam skripsi ini akan dibahas mengenai bagaimana mengkonstruksi model
diskret menggunakan metode beda hingga eksak dari suatu masalah ekologi, yaitu
interaksi yang terjadi antara rusa dan zebra yang dimodelkan secara matematis ke
dalam bentuk persamaan diferensial Lotka-Volterra termodifikasi.
D. Tujuan Penulisan
Tujuan penulisan skripsi adalah:
1. Memaparkan model diskret yang dikonstruksi menggunakan metode beda
hingga eksak.
2. Mencari penyelesaian numeris persamaan diferensial Lotka-Voltera
termodifikasi dengan metode beda hingga eksak.
E. Manfaat Penulisan
Manfaat yang diperoleh dari skripsi ini adalah mengetahui cara
mengkonstruksi model diskret dari suatu persamaan diferensial khususnya
persamaan diferensial Lotka-Volterra termodifikasi dengan menggunakan metode
beda hingga eksak.
F. Metode Penulisan
Skripsi ini ditulis berdasarkan kajian pustaka, seperti jurnal-jurnal matematika
dan buku-buku matematika, serta praktik pemrograman MATLAB.
G. Sistematika Penulisan
Skripsi ini disusun dengan sistematika sebagai berikut:
BAB I PENDAHULUAN
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
A. Latar Belakang
B. Rumusan Masalah
C. Batasan Masalah
D. Tujuan Penulisan
E. Manfaat Penulisan
F. Metode Penelitian
G. Sistematika Penulisan
BAB II PERSAMAAN DIFERENSIAL DAN TURUNAN NUMERIK
A. Turunan
B. Persamaan Diferensial
C. Fungsi Bebas Linear dan Bergantung Linear
D. Wronskian
E. Determinan Matriks
F. Nilai Eigen
G. Turunan Numerik
H. Metode Euler
I. Metode Heun
J. Metode Biseksi
BAB III SISTEM PERSAMAAN DIFERENSIAL LOTKA-VOLTERRA
TERMODIFIKASI DAN METODE BEDA HINGGA EKSAK
A. Sistem Persamaan Lotka-Volterra Termodifikasi
B. Metode Beda Hingga Eksak
BAB IV PENYELESAIAN NUMERIS SISTEM PERSAMAAN
DIFERENSIAL LOTKA-VOLTERRA TERMODIFIKASI
A. Penyelesaian Numeris Sistem Persamaan Diferensial Lotka-Volterra
Termodifikasi dengan Metode Beda Hingga Eksak
B. Pembahasan Hasil Simulasi
BAB V PENUTUP
A. Kesimpulan
B. Saran
DAFTAR PUSTAKA
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

5
BAB II
PERSAMAAN DIFERENSIAL DAN TURUNAN NUMERIK
Pada bab ini akan dibahas landasan teori yang digunakan dalam penulisan skripsi
ini. Landasan teori tersebut meliputi: turunan, persamaan diferensial, fungsi bebas
linear dan bergantung linear, Wronskian, determinan matriks, nilai eigen, turunan
numerik, metode Euler dan metode Heun.
A. Turunan
Pada subbab ini akan dibahas mengenai definisi turunan dan aturan rantai.
Definisi 2.1.1
Misalkan suatu fungsi 𝑓 terdefinisi pada interval terbuka yang memuat titik 𝑎, maka
turunan fungsi 𝑓 di titik 𝑎 yang dinotasikan 𝑓′(𝑎) adalah
𝑓′(𝑎) = limℎ→0
𝑓(𝑎+ℎ)−𝑓(𝑎)
ℎ (2.1)
dengan ketentuan limit tersebut ada.
Contoh
Tentukan turunan di titik 𝑥 = 3 dengan fungsi 𝑓(𝑥) =1
𝑥+ 2.
Penyelesaian:
𝑓′(3) = limℎ→0
𝑓(3 + ℎ) − 𝑓(𝑎)
ℎ
= limℎ→0
(1
3 + ℎ + 2) −73
ℎ
= limℎ→0
3 − (3 + ℎ)3(3 + ℎ)
ℎ
= limℎ→0
−ℎ
3ℎ(3 + ℎ)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

6
= lim
ℎ→0
−1
3(3 + ℎ)
= −1
9
Jadi, nilai turunan fungsi 𝑓(𝑥) =1
𝑥+ 2 di titik 𝑥 = 3 adalah −
1
9.
Aturan Rantai
Misalkan 𝑦 = 𝑓(𝑢), 𝑢 = 𝑔(𝑥), dan turunan 𝑓′(𝑢) dan 𝑔′(𝑥) ada, maka fungsi
komposisi yang didefinisikan dengan 𝑦 = 𝑓(𝑔(𝑥)) mempunyai turunan yang
diberikan dengan
𝑦′(𝑥) = 𝑓′(𝑢)𝑔′(𝑥),
atau
𝑑𝑦
𝑑𝑥=𝑑𝑦
𝑑𝑢
𝑑𝑢
𝑑𝑥 .
Pembuktian aturan rantai dapat dibaca pada (Swokowski, 1980:115).
Contoh
Jika 𝑦 = 𝑢2dan 𝑢 = 𝑥 + 1, maka cari 𝑦′(𝑥).
Penyelesaian:
Diketahui 𝑦 = 𝑢2dan 𝑢 = 𝑥 + 1,
𝑦′(𝑢) = 2𝑢, 𝑢′(𝑥) = 1.
Sehingga menurut aturan rantai di atas
𝑑𝑦
𝑑𝑥 =
𝑑𝑦
𝑑𝑢
𝑑𝑢
𝑑𝑥
= (2𝑢)( 1)
= 2𝑢
= 2(𝑥 + 1)
Jadi, 𝑦′(𝑥) = 2(𝑥 + 1).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

7
B. Persamaan Diferensial
Pada subbab ini akan dibahas definisi dari persamaan diferensial dan klasifikasi
persamaan diferensial.
1. Definisi Persamaan Diferensial
Pada bagian ini akan dibahas terlebih dahulu definisi dari persamaan diferensial dan
contohnya.
Definisi 2.1.2
Persamaan diferensial adalah persamaan yang menyatakan hubungan antara suatu
fungsi dengan turunan-turunannya.
Contoh persamaan diferensial
𝑑𝑦
𝑑𝑥− 18𝑥 = 6 (2.2)
𝑑3𝑦
𝑑𝑡3+𝑑𝑦
𝑑𝑡− 3𝑦 = 0 (2.3)
𝜕2𝑢
𝜕𝑥2−𝜕𝑢
𝜕𝑡= 0 (2.4)
𝜕2𝑢
𝜕𝑥2+𝜕2𝑢
𝜕𝑦2=𝜕𝑢
𝜕𝑡 (2.5)
2. Klasifikasi Persamaan Diferensial
Persamaan diferensial dapat diklasifikasikan berdasarkan banyaknya variabel bebas
dan orde persamaan diferensial.
Definisi 2.1.3
Persamaan diferensial biasa adalah persamaan diferensial yang memuat turunan
biasa dan hanya memuat satu variabel bebas.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
Contoh
Persamaan (2.2) adalah persamaan diferensial biasa dengan variabel bebasnya
adalah 𝑥 dan variabel terikatnya adalah 𝑦. Persamaan (2.3) juga merupakan
persamaan diferensial biasa.
Definisi 2.1.4
Persamaan diferensial parsial adalah persamaan diferensial parsial yang memuat
turunan parsial dan terdapat lebih dari satu variabel bebas.
Contoh
Persamaan (2.4) adalah persamaan diferensial parsial dengan 𝑢 adalah variabel
terikat, sedangkan 𝑥 dan 𝑡 adalah variabel bebas. Persamaan (2.5) juga merupakan
persamaan diferensial parsial.
Definisi 2.1.5
Klasifikasi persamaan diferensial berdasarkan orde:
Orde dari suatu persamaan diferensial adalah orde turunan tertinggi yang terdapat
pada persamaan diferensial. Berdasarkan Roger (1982:76) suatu persamaan
diferensial orde ke-𝑛 dapat ditulis ke dalam bentuk
𝑑𝑛𝑦
𝑑𝑥𝑛= 𝑓 (𝑥, 𝑦,
𝑑𝑦
𝑑𝑥,… ,
𝑑𝑛−1𝑦
𝑑𝑥𝑛−1). (2.6)
Contoh
Persamaan (2.2) adalah persamaan diferensial biasa orde satu karena turunan
tertinggi yang terdapat pada persamaan di atas adalah turunan pertama. Persamaan
(2.3) adalah persamaan diferensial biasa (PDB) orde tiga, persamaan (2.4) dan (2.5)
adalah persamaan diferensial parsial (PDP) orde dua.
Persamaan diferensial biasa juga dapat diklasifikasikan lagi berdasarkan
linearitasnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

9
Definisi 2.1.6
Persamaan diferensial biasa orde 𝑛, dengan variabel bebas 𝑥 dan variable terikat 𝑦
dikatakan linear jika dapat ditulis ke dalam bentuk
𝑎0(𝑥)𝑑𝑛𝑦
𝑑𝑥𝑛+ 𝑎1(𝑥)
𝑑𝑛−1𝑦
𝑑𝑥𝑛−1+⋯+ 𝑎𝑛−1(𝑥)
𝑑𝑦
𝑑𝑥+ 𝑎𝑛(𝑥)𝑦 = 𝑟(𝑥), (2.7)
dengan 𝑎0 tidak sama dengan 0.
Contoh
Persamaan (2.2) dan (2.3) adalah persamaan diferensial biasa linear. Dapat diamati
bahwa pada kedua persamaan tersebut variabel terikat dan turunan-turunannya
berpangkat satu, tidak ada perkalian antara variabel terikat dengan turunan-
turunannya, serta tidak ada bentuk nonlinear dari variable terikat maupun bentuk
nonlinear dari turunan-turunannya.
Definisi 2.1.7
Suatu persamaan diferensial biasa dikatakan nonlinear jika persamaan diferensial
tersebut tidak linear.
Contoh
Berikut ini adalah persamaan diferensial biasa yang nonlinear:
3𝑑𝑦
𝑑𝑥− 18𝑦2 = 0 (2.8)
𝑑3𝑦
𝑑𝑡3+ (
𝑑𝑦
𝑑𝑡)2
− 3𝑦 = 0 (2.9)
𝑑3𝑦
𝑑𝑡3+ (
𝑑2𝑦
𝑑𝑡2) (𝑑𝑦
𝑑𝑡) − 3𝑦 = 0 (2.10)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

10
Persamaan (2.8) adalah persamaan nonlinear karena variable terikat 𝑦 yang terdapat
dalam persamaan tersebut berpangkat dua dengan bentuk 18𝑦2. Persamaan (2.9)
adalah persamaan nonlinear karena terdapat bentuk (𝑑𝑦
𝑑𝑡)2
, yang mana memuat
pangkat dua dari turunan pertamanya. Persamaan (2.10) juga nonlinear karena
bentuk (𝑑2𝑦
𝑑𝑡2) (
𝑑𝑦
𝑑𝑡), yang mana memuat perkalian antara turunan kedua dan turunan
pertama.
C. Fungsi Bebas Linear dan Bergantung Linear
Pada subbab ini akan dibahas definisi dari fungsi yang bebas linear dan bergantung
linear.
Definisi 2.1.8
Fungsi 𝑦1(𝑡), 𝑦2(𝑡), … , 𝑦𝑛(𝑡) dikatakan bergantung linear pada interval I, jika ada
konstanta 𝑐1, 𝑐2, … , 𝑐𝑛 yang tidak semuanya nol atau dengan kata lain ada 𝑐𝑖 ≠
0 untuk suatu atau beberapa 𝑖 dengan 𝑖 = 1,2,… , 𝑛, sehingga menyebabkan
𝑐1𝑦1(𝑡) + 𝑐2𝑦2(𝑡) + ⋯+ 𝑐𝑛𝑦𝑛(𝑡) = 0 (2.11)
untuk semua t pada interval I.
Definisi 2.1.9
Fungsi 𝑦1(𝑡), 𝑦2(𝑡), … , 𝑦𝑛(𝑡) dikatakan bebas linear pada interval 𝐼, jika
𝑐1𝑦1(𝑡) + 𝑐2𝑦2(𝑡) +⋯+ 𝑐𝑛𝑦𝑛(𝑡) = 0 (2.12)
untuk semua 𝑡 pada interval 𝐼 yang berakibat 𝑐1 = 𝑐2 = ⋯𝑐𝑛 = 0.
D. Wronskian
Pada subbab ini akan dibahas definisi dari Wronskian dan teorema yang
berhubungan dengan Wronskian.
Definisi 2.1.10
Misalkan 𝑓1, … , 𝑓𝑛 merupakan fungsi-fungsi yang terdiferensial 𝑛 − 1 kali. Fungsi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

11
𝑊[𝑓1, … , 𝑓𝑛](𝑥) ≔ ||
𝑓1(𝑥) 𝑓2(𝑥) ⋯ 𝑓𝑛(𝑥)
𝑓1′(𝑥) 𝑓2
′(𝑥) ⋯ 𝑓𝑛′(𝑥)
⋮ ⋮ ⋯ ⋮
𝑓1(𝑛−1)
(𝑥) 𝑓2(𝑛−1)
(𝑥) ⋯ 𝑓𝑛(𝑛−1)
(𝑥)
|| (2.13)
disebut Wronskian dari 𝑓1, … , 𝑓𝑛 .
Contoh
Misalkan diketahui 𝑓1 = sin(𝑥) , 𝑓2 = cos (𝑥) dan 𝑓3 = −sin (𝑥) yang terdiferensial
dua kali. Tentukan Wronskian dari 𝑓1, 𝑓2, 𝑓3.
Penyelesaian:
Diketahui 𝑓1 = sin(𝑥) , 𝑓2 = cos (𝑥) dan 𝑓3 = −sin (𝑥), sehingga menurut definisi
2.3.5 Wronskian dari 𝑓1, 𝑓2 , 𝑓3 adalah
𝑊[ 𝑓1, 𝑓2, 𝑓3] = |
sin (𝑥) cos (𝑥) −sin (𝑥)cos (𝑥) −sin (𝑥) −cos (𝑥)−sin (𝑥) −cos (𝑥) sin (𝑥)
| (2.14)
Teorema 2.1.11
Misalkan {𝑓1, … , 𝑓𝑛} menjadi suatu himpunan fungsi-fungsi yang terdiferensial 𝑛 −
1 kali. Himpunan fungsi-fungsi {𝑓1, … , 𝑓𝑛} tersebut adalah bebas linear jika dan
hanya jika 𝑊[𝑓1, … , 𝑓𝑛](𝑥) ≠ 0. Jika himpunan fungsi-fungsi tersebut tidak bebas
linear, maka himpunan fungsi-fungsi tersebut dikatakan bergantung linear.
Contoh
Tentukan apakah kedua himpunan berikut ini bebas linear atau bergantung linear
dengan menggunakan Wronskian.
a). {𝑒−𝑡 , 𝑒−2𝑡} b.) {𝑥 + 2, 𝑥 − 3, 𝑥 + 1}
Penyelesaian:
a.) Wronskian adalah sebagai berikut:
𝑊(𝑡) = | 𝑒−𝑡 𝑒−2𝑡
−𝑒−𝑡 −2𝑒−2𝑡|
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
= 𝑒−𝑡(−2𝑒−2𝑡) − 𝑒−2𝑡(−𝑒−𝑡)
= −2𝑒−3𝑡 + 𝑒−3𝑡
= −𝑒−3𝑡
Hasil dari Wronskiannya adalah −𝑒−3𝑡 , sehingga menurut Teorema 2.1.11
himpunan fungsi pada nomor a) adalah bebas linear.
b.) Wronskiannya adalah sebagai berikut:
𝑊(𝑡) = |𝑥 + 2 𝑥 − 3 𝑥 + 12 −3 10 0 0
|
= (𝑥 + 2)(−3)(0) + (𝑥 − 3)(1)(0) + (𝑥 + 1)(2)(0) −
(𝑥 − 3)(2)(0) − (𝑥 + 2)(1)(0) − (𝑥 + 1)(−3)(0)
= 0
Hasil dari Wronskiannya adalah 0, sehingga menurut Teorema 2.1.11
himpunan fungsi pada nomor b adalah bergantung linear.
E. Determinan Matriks
Pada subbab ini akan dibahas definisi determinan dan cara mencari determinan
2 × 2 dan 𝑛 × 𝑛.
1. Determinan Matriks 𝟐 × 𝟐
Diketahui matriks berukuran 2 × 2
𝐴 = [𝑎 𝑏𝑐 𝑑
],
nilai 𝑎𝑑 − 𝑏𝑐 disebut determinan matriks 𝐴 dan ditulis sebagai berikut
det(A) = det [𝑎 𝑏𝑐 𝑑
] = 𝑎𝑑 − 𝑏𝑐,
(Budhi, 1995:77).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
Contoh
Diketahui suatu matriks 2 × 2 yaitu
𝐴 = [2 45 2
].
Tentukanlah determinan dari matriks 𝐴.
Penyelesaian:
det(A) = det [2 45 2
] = (2 × 2) − (4 × 5) = 4 − 20 = −16.
Jadi, determinan dari matriks 𝐴 adalah −16.
2. Determinan Matriks 𝒏 × 𝒏
Pada bagian ini cara mencari atau menghitung determinan matriks 𝑛 × 𝑛 akan
menggunakan minor dan kofaktor dengan 𝑛 ≥ 3.
Definisi 2.1.12
Diketahui matriks 𝐴 berukuran 𝑛 × 𝑛. Minor 𝑀𝑖𝑗 adalah determinan dari matriks
berukuran (𝑛 − 1) × (𝑛 − 1) yang diperoleh dari matriks 𝐴 dengan menghapus
baris ke-𝑖 dan kolom ke-𝑗. Sedangkan kofaktor 𝐴𝑖𝑗 = (−1)𝑖+𝑗𝑀𝑖𝑗 (Budhi,
1995:89).
Teorema 2.1.13
Diketahui matriks berukuran 𝑛 × 𝑛. Nilai determinan matriks 𝐴 dapat dihitung
dengan cara perluasan baris ke-𝑖
det(A) = 𝑎𝑖1𝐴𝑖1 + 𝑎𝑖2𝐴𝑖2 +⋯+ 𝑎𝑖𝑛𝐴𝑖𝑛
= (−1)𝑖+1𝑎𝑖1𝑀𝑖1 + (−1)𝑖+2𝑎𝑖2𝑀𝑖2 +⋯+ (−1)
𝑖+𝑛𝑎𝑖𝑛𝑀𝑖𝑛 ,
sedangkan perluasan untuk kolom ke-𝑗 adalah
det(A) = 𝑎1𝑗𝐴1𝑗 + 𝑎2𝑗𝐴2𝑗 +⋯+ 𝑎𝑛𝑗𝐴𝑛𝑗
= (−1)1+𝑗𝑎1𝑗𝑀1𝑗 + (−1)2+𝑗𝑎2𝑗𝑀2𝑗 +⋯+ (−1)
𝑛+𝑗𝑎𝑛𝑗𝑀𝑛𝑗 .
Pembuktian pernyataan ini dapat dilihat pada (Budhi, 1995:90).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
Contoh
Hitunglah nilai determinan dari matriks berikut ini
𝐵 = [
1 0 0 −20 −1 0 03 4 5 71 2 4 −1
].
Penyelesaian:
det(𝐵) = det [
1 0 0 −20 −1 0 03 4 5 71 2 4 −1
],
perhitungan determinan matriks 𝐵 akan menggunakan perluasan baris ke-2.
Sehingga determinan matriks 𝐵 dapat ditulis
det(B) = (−1)2+2𝑎22𝑀22 = (−1)(−1) det [1 0 −23 5 71 4 −1
] = −det [1 0 −23 5 71 4 −1
]
Selanjutnya akan dihitung determinan matriks 3 × 3 yang dihasilkan di atas dengan
menggunakan perluasan baris juga
−det [1 0 −23 5 71 4 −1
] = −((−1)1+11 det [
5 74 −1
] + (−1)1+3(−2) det [3 51 4
])
= −((−5 − 28) + (−2)(12 − 5)) = 47
Jadi, det(B) = 47.
F. Nilai Eigen
Bilangan real 𝜆 merupakan nilai eigen dari matriks 𝐴 jika dan hanya jika 𝜆
memenuhi persamaan karakteristik
|𝐴 − 𝜆𝐼| = 0,
Pembuktian pernyataan ini dapat dilihat pada (Budhi, 1995:269).
Contoh
Carilah nilai eigen dari matriks
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

15
𝐴 = [3 56 2
].
Penyelesaian:
Langkah pertama bentuk matriks
𝐴 − 𝜆𝐼 = [3 − 𝜆 76 2 − 𝜆
],
sehingga determinan dari matriks 𝐴 − 𝜆𝐼 adalah
0 = 𝐴 − 𝜆𝐼
= (3 − 𝜆)(2 − 𝜆) − (6)(7)
= 𝜆2 − 5𝜆 + 6 − 42 = 𝜆2 − 5𝜆 − 36
= (𝜆 + 4)(𝜆 − 9).
Jadi, matriks 𝐴 mempunyai dua nilai eigen yaitu 𝜆1 = −4 dan 𝜆2 = 9.
G. Turunan Numerik
Sebelum membahas turunan numerik akan terlebih dahulu dibahas ekspansi deret
Taylor.
Teorema 2.1.14
Misalkan 𝑓 adalah sebuah fungsi yang turunan ke 𝑛 + 1, yaitu 𝑓(𝑛+1), ada pada
interval [𝑎, 𝑏], dan 𝑥0 𝜖 [𝑎, 𝑏]. Untuk setiap 𝑥 𝜖 [𝑎, 𝑏] ada 𝜉(𝑥) diantara 𝑥0 dan 𝑥
dengan
𝑓(𝑥) = 𝑃𝑛(𝑥) + 𝑅𝑛(𝑥), (2.15)
dimana
𝑃𝑛(𝑥) = 𝑓(𝑥0) + 𝑓′(𝑥0)(𝑥 − 𝑥0) +
𝑓′′(𝑥0)
2!(𝑥 − 𝑥0)
2 +⋯+𝑓(𝑛)(𝑥0)
𝑛!(𝑥 − 𝑥0)
𝑛
dan
𝑅𝑛(𝑥) =𝑓(𝑛+1)(𝜉(𝑥))
(𝑛 + 1)!(𝑥 − 𝑥0)
𝑛+1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

16
Persamaan (2.15) secara umum dapat ditulis ke dalam bentuk sebagai berikut:
𝑓(𝑥𝑖+1) = 𝑓(𝑥𝑖) + 𝑓 ′(𝑥𝑖)(𝑥 − 𝑥𝑖) +
𝑓′′(𝑥𝑖)
2!(𝑥 − 𝑥𝑖)
2 +⋯+
𝑓(𝑛)(𝑥𝑖)
𝑛!(𝑥 − 𝑥𝑖)
𝑛 + 𝑅𝑛(𝑥),
atau
𝑓(𝑥𝑖+1) = 𝑓(𝑥𝑖) + 𝑓′(𝑥𝑖)Δ𝑥 +
𝑓′′(𝑥𝑖)
2!(Δ𝑥)2 +⋯+
𝑓(𝑛)(𝑥𝑖)
𝑛!(Δ𝑥)𝑛 +
𝑅𝑛(𝑥),
(2.16)
dimana Δ𝑥 = 𝑥 − 𝑥𝑖 .
1. Pendekatan Turunan Orde Satu Menggunakan Beda Maju
Jika kita memotong deret Taylor setelah turunan orde satu pada persamaan (2.16)
maka akan diperoleh
𝑓(𝑥𝑖+1) = 𝑓(𝑥𝑖) + 𝑓′(𝑥𝑖)Δ𝑥 + 𝑅1, (2.17)
dimana
𝑅1 =𝑓′′(𝜉)
2!Δ𝑥2 atau
𝑅1Δ𝑥
=𝑓′′(𝜉)
2Δ𝑥.
Jika ruas kiri dan kanan persamaan (2.16) kita bagi dengan Δ𝑥 akan diperoleh
𝑓(𝑥𝑖+1)
Δ𝑥=𝑓(𝑥𝑖)
Δ𝑥+𝑓′(𝑥𝑖)(𝑥 − 𝑥𝑖)
Δ𝑥+𝑅1Δ𝑥
atau
𝑓′(𝑥𝑖) ≈𝑓(𝑥𝑖+1) − 𝑓(𝑥𝑖)
Δ𝑥−𝑅1Δ𝑥 ,
atau
𝑓′(𝑥𝑖) ≈ 𝑓(𝑥𝑖+1) − 𝑓(𝑥𝑖)
Δ𝑥+ 𝑂(Δ𝑥).
(2.18)
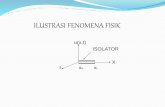
Persamaan (2.18) adalah pendekatan turunan numerik orde satu dengan
menggunakan beda maju. Ilustrasi grafis dari pendekatan numerik beda maju
ditunjukkan oleh Gambar 2.1.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

17
Gambar 2.1.7 Grafik ilustrasi pendekatan turunan orde satu dengan beda maju.
2. Pendekatan Turunan Orde Satu Menggunakan Beda Mundur
Deret Taylor dapat diekspansi mundur untuk menghitung nilai sebelumnya
berdasarkan nilai sekarang. Jika deret Taylor pada persamaan (2.16) diekspansi
mundur maka akan diperoleh:
𝑓(𝑥𝑖−1) = 𝑓(𝑥𝑖) − 𝑓′(𝑥𝑖)Δ𝑥 +
𝑓′′(𝑥𝑖)
2!(Δ𝑥)2 −⋯+
𝑓(𝑛)(𝑥𝑖)
𝑛!(Δ𝑥)𝑛 +
𝑅𝑛(𝑥),
(2.19)
Jika kita memotong deret Taylor setelah turunan orde satu pada persamaan (2.20)
maka akan diperoleh:
𝑓(𝑥𝑖−1) = 𝑓(𝑥𝑖) − 𝑓′(𝑥𝑖)Δ𝑥 + 𝑅1, (2.21)
dengan melakukan operasi aljabar pada persamaan (2.19) akan peroleh
𝑓′(𝑥𝑖) ≈𝑓(𝑥𝑖) − 𝑓(𝑥𝑖−1)
Δ𝑥−𝑅1Δ𝑥 ,
atau
𝑓′(𝑥𝑖) ≈𝑓(𝑥𝑖) − 𝑓(𝑥𝑖−1)
Δ𝑥+ 𝑂(Δ𝑥).
(2.22)
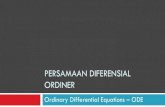
Persamaan (2.22) adalah pendekatan turunan numerik orde satu dengan
menggunakan beda mundur. Ilustrasi grafis dari pendekatan numerik beda mundur
ditunjukkan oleh Gambar 2.1.2.
𝑥 𝑥𝑖+1 𝑥𝑖 𝑥𝑖−1
𝑓(𝑥)
Δ𝑥
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
Gambar 2.1.8 Grafik ilustrasi pendekatan turunan orde satu dengan beda mundur.
3. Pendekatan Turunan Orde Satu Menggunakan Beda Tengah
Pendekatan turunan numerik yang ketiga ini atau beda tengah diperoleh dengan cara
mengurai ekspansi deret Taylor maju dengan ekspansi deret Taylor mundur. Atau
dengan kata lain pendekatan beda tengah diperoleh dengan cara pendekatan rata-
rata beda maju dan beda mundur.
Jika persamaan (2.16) dikurang persamaan (2.19) akan diperoleh:
𝑓′(𝑥𝑖) ≈𝑓(𝑥𝑖+1) − 𝑓(𝑥𝑖−1)
2Δ𝑥+ 𝑂(Δ𝑥2)
(2.23)
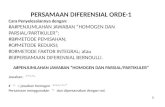
Persamaan (2.23) adalah pendekatan turunan numerik orde satu dengan
menggunakan beda tengah. Ilustrasi grafis dari pendekatan numerik beda tengah
ditunjukkan oleh Gambar 2.1.3.
Gambar 2.1.9 Grafik ilustrasi pendekatan turunan orde satu dengan beda tengah.
𝑓(𝑥)
𝑥
𝑥𝑖 𝑥𝑖−1 𝑥𝑖+1
Δ𝑥
𝑓(𝑥)
𝑥
𝑥𝑖 𝑥𝑖−1 𝑥𝑖+1
2Δ𝑥
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
H. Metode Euler
Dipandang suatu persamaan diferensial
𝑦′(𝑡) = 𝑓(𝑡, 𝑦), 𝑦(𝑡0) = 𝑦0 (2.24)
dan diasumsikan bahwa penyelesaian dari persamaan (2.24) di atas dapat ditulis
dalam bentuk deret Taylor, yaitu
𝑦(𝑡) = 𝑦(𝑡0) + 𝑦′(𝑡0)(𝑡 − 𝑡0) +
𝑦′′(𝑡0)(𝑡 − 𝑡0)2
2+⋯.
(2.25)
Ketika 𝑦′(𝑡0) = 𝑓(𝑡0, 𝑦(𝑡0)) dan Δ𝑡 = 𝑡1 − 𝑡0 disubstitusikan ke persamaan (2.25)
akan menghasilkan bentuk 𝑦(𝑡1) sebagai berikut
𝑦(𝑡1) = 𝑦(𝑡0) + Δ𝑡 𝑓(𝑡0, 𝑦(𝑡0)) +𝑦′′(𝑡0)(Δ𝑡)
2
2+⋯.
(2.26)
Jika kita memilih Δ𝑡 yang cukup kecil, maka kita bisa mengabaikan suku yang
memuat (Δ𝑡)2 beserta suku-suku yang ordenya lebih tinggi dan akan diperoleh
𝑦(𝑡1) = 𝑦(𝑡0) + Δ𝑡 𝑓(𝑡0, 𝑦(𝑡0)), (2.27)
yang mana merupakan aproksimasi Euler. Sehingga secara umum langkah untuk
metode Euler adalah
𝑡𝑘+1 = 𝑡𝑘 + Δ𝑡, 𝑦𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑓(𝑡𝑘, 𝑦𝑘), (2.28)
dengan 𝑘 = 0, 1, … , 𝑛 − 1, untuk mendapatkan 𝑦1, 𝑦2, 𝑦3 , … , 𝑦𝑛.
Contoh
Gunakanlah metode Euler untuk menyelesaikan aproksimasi masalah nilai awal
dari persamaan 𝑦′ = 𝑅𝑦 pada interval [0,1] dengan 𝑦(0) = 𝑦0 dan 𝑅 adalah
konstanta.
Penyelesaian:
Dipilih selisih jaraknya adalah Δ𝑡 dan berdasarkan persamaan (2.28) akan diperoleh
persamaan beda untuk masalah nilai awal tersebut adalah
𝑦𝑘+1 = 𝑦𝑘 + Δ𝑡(𝑅𝑦𝑘)
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

20
𝑦𝑘+1 = 𝑦𝑘(1 + Δ𝑡𝑅).
Jika kita mengurutkan nilai-nilai dari penyelesain tersebut secara rekursif, akan
diperoleh
𝑦1 = 𝑦0(1 + Δ𝑡𝑅)
𝑦2 = 𝑦1(1 + Δ𝑡𝑅) = 𝑦0(1 + Δ𝑡𝑅)2
𝑦3 = 𝑦2(1 + Δ𝑡𝑅) = 𝑦0(1 + Δ𝑡𝑅)3
⋮
𝑦𝑛 = 𝑦𝑛−1(1 + Δ𝑡𝑅) = 𝑦0(1 + Δ𝑡𝑅)𝑛
atau secara umum skema Euler untuk masalah nilai awal tersebut menghasilkan
nilai
𝑦𝑘 = 𝑦0(1 + Δ𝑡𝑅)𝑘,
untuk 𝑘 = 0, 1,… , 𝑛.
I. Metode Heun
Penyelesaian numerik dari suatu persamaan diferensial dengan masalah nilai awal
dapat diselesaikan dengan metode Euler. Selain dengan menggunakan metode
Euler dapat juga menggunakan metode Heun yang mana merupakan peningkatan
dari metode Euler. Misalnya diketahui
𝑦′(𝑡) = 𝑓(𝑡, 𝑦), 𝑦(𝑡0) = 𝑦0, (2.29)
dengan menggunakan metode Heun langkah pertama yang dihitung adalah nilai
dari �̃�𝑘+1 dan yang terakhir adalah menghitung pendekatan dari 𝑦𝑘+1. Secara umum
langkah untuk metode Heun adalah
�̃�𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑓(𝑡𝑘, 𝑦𝑘) (2.30)
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2[𝑓(𝑡𝑘, 𝑦𝑘) + 𝑓(𝑡𝑘+1, �̃�𝑘+1)],
dimana Δ𝑡 adalah selisih jarak dan 𝑡𝑘+1 = 𝑡𝑘 + Δ𝑡.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
Contoh
Gunakanlah metode Heun untuk menyelesaikan aproksimasi masalah nilai awal
dari persamaan 𝑦′ = 𝑅𝑦 pada interval [0,1] dengan 𝑦(0) = 𝑦0 dan 𝑅 adalah
konstanta.
Penyelesaian:
Dipilih selisih jarak Δ𝑡 dan berdasarkan persamaan (2.30) akan diperoleh
persamaan beda untuk masalah nilai awal tersebut adalah
�̃�𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑅𝑦𝑘 ,
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2[𝑅𝑦𝑘 + (𝑦𝑘 + Δ𝑡 𝑅𝑦𝑘)],
atau
�̃�𝑘+1 = 𝑦𝑘(1 + Δ𝑡𝑅),
𝑦𝑘+1 = 𝑦𝑘 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅]).
Sehingga persamaan beda untuk persamaan (2.30) bisa ditulis dalam satu bentuk
saja, yaitu
𝑦𝑘+1 = 𝑦𝑘 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅]).
Jika kita mengurutkan nilai-nilai dari penyelesaian tersebut secara rekursif, akan
diperoleh
𝑦1 = 𝑦0 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅]) ,
𝑦2 = 𝑦1 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅]) = 𝑦0 (1 +
Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅])
2
⋮
𝑦𝑛 = 𝑦𝑛−1 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅]) = 𝑦0 (1 +
Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅])
𝑛
atau secara umum skema Heun untuk masalah nilai awal tersebut menghasilkan
nilai
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

22
𝑦𝑘 = 𝑦0 (1 +Δ𝑡
2[𝑅 + 1 + Δ𝑡𝑅])
𝑘
.
untuk 𝑘 = 0, 1,… , 𝑛.
J. Metode Biseksi
Teorema 2.1.15
Jika terdapat fungsi 𝑓 yang kontinu pada interval tertutup [𝑎, 𝑏] dan 𝑓(𝑎). 𝑓(𝑏) <
0, maka ada 𝑐 ∈ (𝑎, 𝑏) sehingga berlaku 𝑓(𝑐) = 0.
Bukti:
Diketahui bahwa 𝑓(𝑎). 𝑓(𝑏) < 0 hal ini terjadi ketika 𝑓(𝑎) < 0 dan 𝑓(𝑏) > 0.
Didefinisikan suatu himpunan
𝐸 = {𝑥 ∈ [𝑎, 𝑏] ∶ 𝑓(𝑥) < 0}.
dan himpunan tersebut tidak kosong karena 𝑎 ∈ 𝐸 dan 𝐸 mempunyai batas atas 𝑏.
Misalkan 𝑓(𝑐) ≠ 0 karena 𝑓 kontiniu pada 𝑐 terdapat 𝛿 > 0 sedemikian sehingga
|𝑥 − 𝑐| < 𝛿 dan 𝑥 ∈ [𝑎, 𝑏] sehingga mengakibatkan
|𝑓(𝑥) − 𝑓(𝑐)| <1
2|𝑓(𝑐)|.
Jika 𝑓(𝑐) < 0, maka 𝑐 ≠ 𝑏 dan
𝑓(𝑥) = 𝑓(𝑐) + 𝑓(𝑥) − 𝑓(𝑐) < 𝑓(𝑐) −1
2𝑓(𝑐),
Untuk semua 𝑥 ∈ [𝑎, 𝑏] sehinga |𝑥 − 𝑐| < 𝛿. Jadi 𝑓(𝑥) <1
2𝑓(𝑐) < 0. Karena ada
𝑥 ∈ 𝐸 dengan 𝑥 > 𝑐, yang mana kontradiksi dengan fakta bahwa 𝑐 adalah batas
atas dari 𝐸.
Jika 𝑓(𝑐) > 0, maka 𝑐 ≠ 𝑎 dan
𝑓(𝑥) = 𝑓(𝑐) + 𝑓(𝑥) − 𝑓(𝑐) > 𝑓(𝑐) −1
2𝑓(𝑐),
untuk semua 𝑥 ∈ [𝑎, 𝑏], sehingga |𝑥 − 𝑐| < 𝛿. Jadi, 𝑓(𝑥) >1
2𝑓(𝑐) > 0. Ada 𝛽 >
0 sehingga 𝑐 − 𝛽 ≥ 𝑎 dan 𝑓(𝑥) > 0 untuk 𝑐 − 𝛽 ≤ 𝑥 ≤ 𝑐.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

23
Pada kasus ini, 𝑐 − 𝛽 < 𝑐 adalah batas atas dari 𝐸. Karena 𝑐 adalah batas atas dan
𝑓(𝑥) > 0 untuk 𝑐 − 𝛽 ≤ 𝑥 ≤ 𝑐, yang mana kontradiksi bahwa 𝑐 merupakan batas
paling atas. Karena 𝑐 ≠ 𝑎, 𝑏 maka terbukti bahwa 𝑓(𝑐) = 0.
Diberikan suatu fungsi 𝑓 yang kontinu pada interval [𝑎, 𝑏] dan 𝑐 ∈ (𝑎, 𝑏)
merupakan akar karakteristik dari fungsi 𝑓.
Langkah pertama dalam metode biseksi yaitu menentukan nilai tengah, yaitu
𝑐 =𝑎 + 𝑏
2,
selanjutnya menganalisis kemungkinan-kemungkinan yang akan muncul:
1. Jika 𝑓(𝑎). 𝑓(𝑐) < 0, maka akar dari fungsi f terletak diantara 𝑎 dan 𝑐,
2. Jika 𝑓(𝑎). 𝑓(𝑐) > 0, maka akar dari fungsi f terletak diantara 𝑐 dan 𝑏,
3. Jika 𝑓(𝑎). 𝑓(𝑐) = 0, maka 𝑎 atau 𝑐 adalah akar real dari fungsi 𝑓.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
BAB III
SISTEM PERSAMAAN DIFERENSIAL LOTKA-VOLTERRA
TERMODIFIKASI DAN METODE BEDA HINGGA EKSAK
Pada bab ini akan dibahas sistem persamaan diferensial Lotka-Volterra
termodifikasi dan metode beda hingga eksak yang akan digunakan untuk
menyelesaikan persamaan diferensial Lotka-Volterra termodifikasi.
A. Sistem Persamaan Lotka-Volterra Termodifikasi
Dalam subbab ini akan dibahas model dari persamaan diferensial Lotka-
Volterra khususnya untuk model kompetisi dan juga akan dipaparkan hasil
modifikasi dari persamaan diferensial Lotka-Volterra.
1. Persamaan Diferensial Lotka-Volterra
Misalkan 𝑥 menggambarkan jumlah populasi rusa pada waktu 𝑡 dan 𝑦
menggambarkan jumlah populasi zebra pada waktu 𝑡. Rusa merupakan hewan
herbivora yang bertahan hidup dengan mengkonsumsi tumbuh-tumbuhan. Kita
dapat mengasumsikan laju pertumbuhan rusa per kapita (tanpa adanya zebra)
memiliki nilai konstan 𝑟1, dengan 𝑟1 > 0, tetapi dengan adanya zebra akan
mengurangi laju pertumbuhan rusa per kapita. Jika kita mengasumsikan bahwa laju
pertumbuhan rusa berkurang sejumlah 𝑎12𝑦 yang sebanding dengan jumlah zebra,
dengan 𝑎12 > 0, maka laju pertumbuhan rusa per kapita yang dihasilkan adalah
𝑟1 − 𝑎12𝑦. Persamaan pertumbuhan rusa adalah
𝑑𝑥
𝑑𝑡= (𝑟1 − 𝑎12𝑦)𝑥.
(3.1)
Misalkan zebra bergantung sepenuhnya pada tumbuh-tumbuhan sebagai satu-
satunya sumber makanan. Tanpa adanya rusa, kita mengasumsikan laju
pertumbuhan zebra per kapita memiliki nilai konstan 𝑟2, dengan 𝑟2 > 0, tetapi
adanya rusa akan menurunkan laju pertumbuhan zebra per kapita sejumlah 𝑎21𝑥
yang sebanding dengan jumlah rusa, dengan 𝑎21 > 0. Laju pertumbuhan zebra per
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

25
kapita yang dihasilkan adalah 𝑟2 − 𝑎21𝑥, sehingga persamaan pertumbuhan zebra
adalah
𝑑𝑦
𝑑𝑡= (𝑟2 − 𝑎21𝑥)𝑦.
(3.2)
Persamaan (3.1) dan persamaan (3.2) menghasilkan model kompetisi sebagai
berikut:
{
𝑑𝑥
𝑑𝑡= (𝑟1 − 𝑎12𝑦)𝑥,
𝑑𝑦
𝑑𝑡= (𝑟2 − 𝑎21𝑥)𝑦.
(3.3)
Jika kita mengasumsikan bahwa sumber makanan rusa dan zebra yang awalnya
tidak terbatas menjadi terbatas maka laju pertumbuhan per kapita rusa (tanpa
adanya zebra dan tanpa adanya kompetisi antar rusa dalam memperoleh makanan)
memiliki nilai konstan 𝑟1, dengan 𝑟1 > 0. Dengan adanya zebra dan kompetisi antar
rusa dalam perebutan makanan (tumbuhan) akan mengurangi laju pertumbuhan per
kapita rusa. Jika kita mengasumsikan bahwa laju pertumbuhan rusa berkurang
sejumlah 𝑎12𝑦 yang sebanding dengan jumlah zebra, dengan 𝑎12 > 0 dan sejumlah
𝑎11𝑥 yang sebanding dengan jumlah rusa, dengan 𝑎11 > 0, maka laju pertumbuhan
rusa per kapita yang dihasilkan adalah 𝑟1 − 𝑎11𝑥 − 𝑎12𝑦. Model pertumbuhan rusa
menjadi
𝑑𝑥
𝑑𝑡= 𝑟1𝑥 − 𝑎11𝑥
2 − 𝑎12𝑥𝑦, (3.4)
Hal yang sama juga terjadi pada zebra. Jika diasumsikan sumber makan
menjadi terbatas maka laju pertumbuhan zebra per kapita (tanpa adanya rusa dan
kompetisi antara zebra dalam memperoleh makanan) memiliki nilai konstan 𝑟2,
dengan 𝑟2 > 0. Dengan adanya rusa akan menurunkan laju pertumbuhan zebra per
kapita sejumlah 𝑎21𝑥, dengan 𝑎21 > 0 yang sebanding dengan jumlah rusa. Akan
tetapi, dengan adanya kompetisi antara zebra dalam memperoleh makanan akan
mengakibatkan laju pertumbuhan zebra per kapita menurun sejumah 𝑎22𝑦, dengan
𝑎22 > 0 yang sebanding dengan jumlah zebra. Laju pertumbuhan zebra per kapita
yang dihasilkan adalah 𝑟2 − 𝑎21𝑥 − 𝑎22𝑦, sehingga persamaan pertumbuhan zebra
adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

26
𝑑𝑦
𝑑𝑡= 𝑟2𝑦 − 𝑎21𝑥𝑦 − 𝑎22𝑦
2. (3.5)
Berdasarkan persamaan (3.4) dan persamaan (3.5) diperoleh persamaan
diferensial Lotka-Volterra untuk masalah kompetisi yang didefinisikan dengan
bentuk
𝑑𝑥
𝑑𝑡= 𝑟1𝑥 − 𝑎11𝑥
2 − 𝑎12𝑥𝑦, (3.6a)
𝑑𝑦
𝑑𝑡= 𝑟2𝑦 − 𝑎21𝑥𝑦 − 𝑎22𝑦
2, (3.6b)
𝑥(0) = 𝑥0 > 0, 𝑦(0) = 𝑦0 > 0,
dimana 𝑟1, 𝑟2, 𝑎11, 𝑎22, 𝑎12, 𝑎21 adalah parameter konstan positif untuk kasus
dinamika rusa-zebra ini dan 𝑥(𝑡) dan 𝑦(𝑡) adalah variabel terikat. Pada umumnya
nilai dari parameter yang diberikan bisa bernilai positif, nol atau negatif bergantung
pada kasus yang dihadapi. Kita menganggap 𝑥(𝑡) dan 𝑦(𝑡) menggambarkan
besarnya masing-masing populasi.
2. Persamaan Diferensial Lotka-Volterra Termodifikasi
Kita telah mengetahui bahwa persamaan (3.6) merupakan persamaan
diferensial Lotka-Volterra khususnya untuk masalah kompetisi. Persamaan
diferensial Lotka-Volterra tersebut akan dimodifikasi dengan mengganti x dan y
masing-masing dengan √𝑥 dan √𝑦, sehingga kita akan memperoleh persamaan
diferensial Lotka-Volterra termodifikasi sebagai berikut
𝑑𝑥
𝑑𝑡= 𝑟1√𝑥 − 𝑎11𝑥 − 𝑎12√𝑥√𝑦,
(3.7a)
𝑑𝑦
𝑑𝑡= −𝑟2√𝑦 + 𝑎21√𝑥√𝑦 − 𝑎22𝑦,
(3.7b)
bisa dilihat bahwa persamaan (3.6) dan (3.7) memiliki koefisien yang sama yaitu
𝑟1, 𝑟2, 𝑎11, 𝑎12, 𝑎21, 𝑎22. Penggantian 𝑥 menjadi √𝑥 dan 𝑦 dan menjadi √𝑦 diajukan
oleh Mickens (2018) untuk dijadikan sebagai model kasus uji keefektifan metode
beda hingga eksak.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

27
B. Metode Beda Hingga Eksak
Sebelum membahas metode beda hingga eksak, akan dibahas terlebih dahulu
model diskret dari persamaan diferensial biasa
𝑑𝑦
𝑑𝑡= 𝑓(𝑦, 𝜆), (3.8)
dimana 𝜆 adalah suatu parameter. Model beda hingga paling umum untuk
persamaan (3.8) merupakan turunan diskret orde pertama yang ditunjukkan dalam
bentuk sebagai berikut:
𝑦𝑘+1 − 𝑦𝑘𝜙(Δ𝑡, 𝜆)
= 𝐹(𝑦𝑘 , 𝑦𝑘+1, 𝜆, Δ𝑡), (3.9)
turunan diskret pada sisi kiri adalah generalisasi dari bentuk
𝑑𝑦
𝑑𝑡→𝑦𝑘+1 − 𝑦𝑘
Δ𝑡 .
(3.10)
Berdasarkan persamaan (3.9), kita peroleh dimana fungsi penyebut 𝜙(Δ𝑡, 𝜆)
mempunyai sifat
𝜙(Δ𝑡, 𝜆) = Δ𝑡 + 𝑂(Δ𝑡2),
𝜆 = tetap, Δ𝑡 → 0.
(3.11)
Bentuk persamaan (3.9) di atas merupakan turunan diskret yang didasarkan
pada definisi turunan (2.1) yang mana dapat digeneralisasi sebagai berikut
𝑑𝑦
𝑑𝑡= lim
Δ𝑡→0
𝑦[𝑡 + 𝜓1(Δ𝑡)] − 𝑦(𝑡)
𝜓2(Δ𝑡), (3.12)
dimana
𝜓𝑖(Δ𝑡) = Δ𝑡 + 𝑂(Δ𝑡2), Δ𝑡 → 0; 𝑖 = 1,2.
Contoh dari fungsi 𝜓(Δ𝑡) yang memenuhi kondisi ini adalah
𝜓(Δ𝑡) =
{
Δ𝑡,sin(Δ𝑡) ,
𝑒Δ𝑡 − 1,
1 − 𝑒−Δ𝑡 ,1−𝑒−𝜆Δ𝑡
𝜆,
dan lainnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

28
Perlu diperhatikan dalam pengambilan limit Δ𝑡 → 0 untuk memperoleh
turunan, penggunaan salah satu dari 𝜓(Δ𝑡) akan mengarah pada hasil biasa dari
suatu turunan pertama
𝑑𝑦
𝑑𝑡= lim
Δ𝑡→0
𝑦[𝑡 + 𝜓1(Δ𝑡)] − 𝑦(𝑡)
𝜓2(Δ𝑡)= limΔ𝑡→0
𝑦(𝑡 + Δ𝑡) − 𝑦(𝑡)
Δ𝑡 . (3.13)
1. Skema Beda Hingga Eksak
Dipandang bentuk umum persamaan diferensial orde satu
𝑑𝑦
𝑑𝑡= 𝑓(𝑦, 𝑡, 𝜆), 𝑦(𝑡0) = 𝑦0,
(3.14)
dimana 𝑓(𝑦, 𝑡, 𝜆) sedemiakan sehingga persamaan (3.14) memiliki penyelesaian
tunggal pada interval, 0 ≤ 𝑡 < 𝑇 dan 𝜆 adalah parameter pada interval 𝜆1 ≤ 𝜆 ≤ 𝜆2
dengan 𝜆1 dan 𝜆2 adalah konstanta. Penyelesaiannya dapat ditulis sebagai berikut:
𝑦(𝑡) = 𝜙(𝜆, 𝑦0, 𝑡0, 𝑡) (3.15)
dimana
𝜙(𝜆, 𝑦0, 𝑡0, 𝑡0) = 𝑦0.
Dipandang model diskret dari persamaan (3.14)
𝑦𝑘+1 = 𝑔(𝜆, Δ𝑡, 𝑦𝑘 , 𝑡𝑘), (3.16)
dimana 𝑡𝑘 = 𝑘. Δ𝑡, 𝑦𝑘 ≈ 𝑦(𝑡𝑘).
Penyelesaian dari persamaan (3.16) dapat ditulis dalam bentuk
𝑦𝑘 = 𝜓(𝜆, Δ𝑡, 𝑦0, 𝑡0, 𝑡𝑘), (3.17)
dimana
𝜓(𝜆, Δ𝑡, 𝑦0, 𝑡0, 𝑡0) = 𝑦0 .
Definisi 3.1.1
Persamaan (3.14) dan (3.16) dikatakan memiliki penyelesaian umum yang sama
jika dan hanya jika
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
𝑦𝑘 = 𝑦(𝑡𝑘),
untuk sebarang Δ𝑡 > 0 dan untuk semua 𝑘.
Definisi 3.1.2
Suatu skema beda hingga eksak adalah suatu skema yang menghasilkan
penyelesaian beda tertentu yang mana penyelesaian umum dari persamaan beda
hingga tersebut sama dengan penyelesaian diferensial terkait.
Teorema 3.1.3
Persamaan diferensial
𝑑𝑦
𝑑𝑡= 𝑓(𝑦, 𝑡, 𝜆), 𝑦(𝑡0) = 𝑦0,
(3.18)
mempunyai skema beda hingga eksak yang diekspresikan dengan bentuk sebagai
berikut
𝑦𝑘+1 = 𝜙(𝜆, 𝑦𝑘 , 𝑡𝑘 , 𝑡𝑘+1), (3.19)
dimana fungsi 𝜙 sama dengan fungsi pada persamaan (3.15).
Bukti:
Diasumsikan penyelesaian umum untuk persamaan (3.18) didefinisikan sebagai
berikut
𝑦(𝑡) = 𝜙(𝜆, 𝑦0 , 𝑡0, 𝑡)
dimana 𝑦0 adalah nilai dari 𝑥(𝑡) saat 𝑡 = 𝑡0.
Nemytski and Stepanov (1969) mengatakan
𝑓(𝑓(𝑥, 𝑡1), 𝑡2) = 𝑓(𝑥, 𝑡1 + 𝑡2), (3.20)
sehingga berdasarkan persamaan (3.20) di atas dapat kita tulis
𝑓(𝑓(𝑦, 𝑡, 𝜆), Δ𝑡, 𝜆) = 𝑓(𝑦, 𝑡 + Δ𝑡, 𝜆), (3.21)
dengan nilai awalnya adalah 𝑦(𝑡) = 𝑦𝑡.
Berdasarkan pembahasan di atas diperoleh penyelesaian untuk persamaan (3.21)
adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

30
𝑦(𝑡 + Δ𝑡) = 𝜙(𝜆, 𝑦(𝑡), 𝑡, 𝑡 + Δ𝑡).
Jika kita mensubstitusi
𝑡 → 𝑡𝑘, 𝑦(𝑡) → 𝑦𝑘 ,
maka penyelesaian untuk persamaan (3.21) akan menjadi
𝑦𝑘+1 = 𝜙(𝜆, 𝑦𝑘 , 𝑡𝑘 , 𝑡𝑘+1). (3.22)
Persamaan (3.22) merupakan persamaan beda biasa yang dibutuhkan yang mana
persamaan (3.22) memiliki penyelesaian umum yang dengan persamaan (3.18).
2. Contoh Skema Beda Hingga Eksak
Diberikan suatu himpunan fungsi-fungsi yang bebas linear
{𝑦(𝑖)(𝑡)} ; 𝑖 = 1, 2,… , 𝑁, (3.23)
dimana fungsi-fungsi tersebut selalu mungkin membangun persamaan beda linear
orde 𝑁, yang memiliki fungsi diskret yang sesuai sebagai penyelesaian. Diberikan
𝑦𝑘(𝑖)≡ 𝑦(𝑖)(𝑡𝑘), 𝑡𝑘 = (Δ𝑡)𝑘; (3.24)
sehingga determinan berikut ini memberikan persamaan yang diperlukan
||
𝑦𝑘 𝑦𝑘1 𝑦𝑘+1
2 ⋯ 𝑦𝑘𝑛
𝑦𝑘+1 𝑦𝑘+11 𝑦𝑘+1
2 ⋯ 𝑦𝑘+1𝑛
⋮ ⋮ ⋮ ⋮ ⋮𝑦𝑘+𝑛 𝑦𝑘+𝑛
1 𝑦𝑘+𝑛2 ⋯ 𝑦𝑘+𝑛
𝑛
|| = 0.
Bukti dan penjelasan tentang hal tersebut diberikan oleh Mickens (1990).
Contoh 1
Dipandang suatu fungsi
𝑦(1)(𝑡) = 𝑒−𝜆𝑡 , (3.25)
dimana fungsi tersebut merupakan suatu penyelesaian untuk persamaan diferensial
orde satu
𝑑𝑦
𝑑𝑡= −𝜆𝑦. (3.26)
Persamaan beda yang sesuai adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

31
det |𝑦𝑘 𝑦𝑘
(1)
𝑦𝑘+1 𝑦𝑘+1(1)| = |
𝑦𝑘 𝑒−𝜆Δ𝑡𝑘
𝑦𝑘+1 𝑒−𝜆Δ𝑡(𝑘+1)| = 𝑒−𝜆Δ𝑡𝑘 |
𝑦𝑘 1
𝑦𝑘+1 𝑒−𝜆Δ𝑡|
= 𝑒−𝜆Δ𝑡𝑘[𝑒−𝜆Δ𝑡𝑦𝑘 − 𝑦𝑘+1] = 0
atau dapat ditulis
𝑦𝑘+1 = 𝑒−𝜆Δ𝑡𝑦𝑘 . (3.27)
Persamaan (3.27) di atas adalah persamaan beda hingga eksak atau skema beda
hingga eksak yang sesuai untuk persamaan (3.26). Bentuk dari skema eksak di atas
dapat ditulis ke dalam bentuk yang lebih konstruktif dengan melakukan operasi
aljabar pada persamaan (3.27) sebagai berikut:
𝑦𝑘+1 = 𝑒−𝜆Δ𝑡𝑦𝑘
atau
𝑦𝑘+1 − 𝑦𝑘 + 𝑦𝑘 = 𝑒
−𝜆Δ𝑡𝑦𝑘
atau
𝑦𝑘+1 − 𝑦𝑘 = 𝑒
−𝜆Δ𝑡𝑦𝑘 − 𝑦𝑘
atau
𝑦𝑘+1 − 𝑦𝑘 =
𝜆
𝜆(𝑒−𝜆Δ𝑡𝑦𝑘 − 𝑦𝑘)
atau
𝑦𝑘+1 − 𝑦𝑘 = −𝜆 (
−𝑒−𝜆Δ𝑡𝑦𝑘+𝑦𝑘
𝜆)
atau
𝑦𝑘+1 − 𝑦𝑘 = −𝜆 (
−𝑒−𝜆Δ𝑡+1
𝜆)𝑦𝑘
atau
𝑦𝑘+1 − 𝑦𝑘 = −𝜆 (
1−𝑒−𝜆Δ𝑡
𝜆)𝑦𝑘
atau
𝑦𝑘+1 − 𝑦𝑘
( 1 − 𝑒−𝜆Δ𝑡
𝜆 )
= −𝜆𝑦𝑘 . (3.28)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
Setelah melakukan operasi aljabar pada persamaan (3.27) diperoleh persamaan
(3.28). Sebagai catatan metode Euler standar untuk persamaan (3.26) adalah
𝑦𝑘+1 − 𝑦𝑘Δ𝑡
= −𝜆𝑦𝑘 . (3.29)
Contoh 2
Dipandang persamaan diferensial osilator harmonik
𝑑2𝑦
𝑑𝑡2+ 𝑦 = 0.
(3.30)
Persamaan diferensial di atas memiliki dua penyelesaian yang bebas linear yaitu
𝑦(1)(𝑡) = cos(𝑡), 𝑦(2)(𝑡) = sin(𝑡),
atau dalam bentuk kompleks ditulis
�̅�(1)(𝑡) = 𝑒𝑖𝑡 , �̅�(2)(𝑡) = 𝑒−𝑖𝑡 .
Untuk memperoleh persamaan beda yang sesuai kita terapkan cara yang sama
seperti pada contoh 1
det [
𝑦𝑘 𝑒𝑖Δ𝑡𝑘 𝑒−𝑖Δ𝑡𝑘
𝑦𝑘+1 𝑒𝑖Δ𝑡(𝑘+1) 𝑒−𝑖Δ𝑡(𝑘+1)
𝑦𝑘+2 𝑒𝑖Δ𝑡(𝑘+2) 𝑒−𝑖Δ𝑡(𝑘+2)] = 0
Menggunakan aturan minor dan kofaktor diperoleh
𝑦𝑘(𝑒𝑖Δ𝑡(𝑘+1)𝑒−𝑖Δ𝑡(𝑘+2) − 𝑒−𝑖Δ𝑡(𝑘+1)𝑒𝑖Δ𝑡(𝑘+2)) − 𝑒𝑖Δ𝑡𝑘(𝑦𝑘+1𝑒
−𝑖Δ𝑡(𝑘+2) −
𝑒−𝑖Δ𝑡(𝑘+1)𝑦𝑘+2) + 𝑒−𝑖Δ𝑡𝑘(𝑦𝑘+1𝑒
𝑖Δ𝑡(𝑘+2) − 𝑒𝑖Δ𝑡(𝑘+2)𝑦𝑘+2) = 0
atau
𝑦𝑘(𝑒−𝑖Δ𝑡 − 𝑒𝑖Δ𝑡) − 𝑦𝑘+1(𝑒
−2𝑖Δ𝑡 − 𝑒2𝑖Δ𝑡) + 𝑦𝑘+2(𝑒−𝑖Δ𝑡 − 𝑒𝑖Δ𝑡) = 0
atau
𝑦𝑘((cos(Δ𝑡) − 𝑖 sin(Δ𝑡)) − (𝑐𝑜𝑠(Δ𝑡) + 𝑖 sin(Δ𝑡))) − 𝑦𝑘+1((cos(2Δ𝑡) −
𝑖 𝑠𝑖𝑛(2Δ𝑡)) − ((cos(2Δ𝑡) + 𝑖 𝑠𝑖𝑛(2Δ𝑡))) + 𝑦𝑘+2((cos(Δ𝑡) − 𝑖 sin(Δ𝑡)) −
((cos(Δ𝑡) + 𝑖 sin(Δ𝑡))) = 0
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

33
𝑦𝑘(−2𝑖 sin(Δ𝑡)) − 𝑦𝑘+1(−2𝑖 sin(2Δ𝑡)) + 𝑦𝑘+2(−2𝑖 sin(Δ𝑡)) = 0
atau
sin(Δ𝑡)𝑦𝑘 − sin(2Δ𝑡)𝑦𝑘+1 + sin(Δ𝑡) 𝑦𝑘+2 = 0
atau
sin(Δ𝑡)𝑦𝑘 − 2sin(Δ𝑡) cos(Δ𝑡) 𝑦𝑘+1 + sin(Δ𝑡) 𝑦𝑘+2 = 0
atau
𝑦𝑘 − 2 cos(Δ𝑡)𝑦𝑘+1 + 𝑦𝑘+2 = 0. (3.31)
Persamaan cos(2Δ𝑡) = 1 − 2sin2Δ𝑡 yang mengakibatkan cos Δ𝑡 = 1 − 2sin2(Δ𝑡
2)
sehingga diperoleh
𝑦𝑘 − 2(1 − 2sin2 (Δ𝑡
2))𝑦𝑘+1 + 𝑦𝑘+2 = 0.
(3.32)
Pada persamaan (3.32) kita menggeser indeks k satu satuan ke bawah dan akan kita
peroleh
𝑦𝑘−1 − 2(1 − 2sin2 (Δ𝑡
2))𝑦𝑘 + 𝑦𝑘+1 = 0,
(3.33)
atau dapat ditulis
𝑦𝑘+1 = 2 (1 − 2sin2 (Δ𝑡
2))𝑦𝑘 −𝑦𝑘−1.
(3.34)
Persamaan (3.34) di atas adalah persamaan beda hingga eksak atau skema beda
hingga eksak yang sesuai untuk persamaan (3.30). Persamaan (3.34) juga dapat
ditulis ke dalam bentuk yang lebih konstruktif. Jadi, dengan cara yang sama pada
contoh 1 akan diperoleh persamaan sebagai berikut:
𝑦𝑘−1 − 𝑦𝑘+1 − 2𝑦𝑘
4sin2 (Δ𝑡2 )
= −𝑦𝑘 (3.35)
Setelah melakukan operasi aljabar pada persamaan (3.34) diperoleh persamaan
(3.35). Sebagai catatan bahwa metode beda hingga standar untuk persamaan (3.30)
adalah
𝑦𝑘−1 − 𝑦𝑘+1 − 2𝑦𝑘Δ𝑡2
= −𝑦𝑘 , (3.35a)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

34
Persamaan (3.35a) akan menjadi pembanding metode beda hingga eksak untuk
menyelesaikan persamaan (3.30).
Cara yang digunakan untuk meperoleh atau mengkonstruksi skema beda
eksak pada contoh 1 dan contoh 2 tidak dapat digunakan untuk mengkonstruksi
skema beda eksak untuk persamaan diferensial yang nonlinear. Berikut ini adalah
langkah-langkah yang akan diterapkan untuk mengkonstruksi skema beda eksak
untuk persamaan diferensial nonlinear:
1. Dipandang suatu sistem dari 𝑁 pasang persamaan diferensial biasa orde satu
𝑑𝑌
𝑑𝑡= 𝐹(𝑌, 𝑡, 𝜆), 𝑌(𝑡0) = 𝑌0,
(3.36)
dimana 𝑌, 𝐹 adalah vektor kolom berdimensi 𝑁 yang komponen ke-𝑖 adalah
(𝑌)𝑖 = 𝑦(𝑖)(𝑡),
(𝐹)𝑖 = 𝑓(𝑖)[𝑦(1), 𝑦(2), … , 𝑦(𝑁); 𝑡, 𝜆].
2. Penyelesaian umum untuk persamaan (3.36) dinyatakan dengan
𝑌(𝑡) = Φ(λ, 𝑌0, 𝑡0, 𝑡)
dimana
𝑦(𝑖)(𝑡) = 𝜙(𝑖)[λ, 𝑦0(1), 𝑦0
(2), … , 𝑦0(𝑁), 𝑡0, 𝑡].
3. Persamaan beda eksak yang sesuai dengan persamaan diferensial diperoleh
dengan membuat substitusi berikut
{
𝑌(𝑡) → 𝑌𝑘+1,
𝑌0 = 𝑌(𝑡0) → 𝑌𝑘 ,𝑡0 → 𝑡𝑘, 𝑡 → 𝑡𝑘+1.
Contoh 3
Dipandang persamaan diferensial logistik umum dengan suatu nilai awal
𝑑𝑦
𝑑𝑡= 𝜆1𝑦 − 𝜆2𝑦
2, 𝑦(𝑡0) = 𝑦0 (3.37)
dimana 𝜆1 dan 𝜆2 adalah konstanta.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

35
Penyelesaian untuk masalah nilai awal dari persamaan (3.37) di atas adalah
𝑦(𝑡) =𝜆1𝑦0
(𝜆1 − 𝑦0𝜆2)𝑒−𝜆1(𝑡−𝑡0) + 𝜆2𝑦0
. (3.38)
Berdasarkan langkah nomor 3 di atas kita akan mensubstitusikan
𝑡0 → 𝑡𝑘 , 𝑡 → 𝑡𝑘+1, 𝑦0 → 𝑦𝑘 , 𝑦(𝑡) → 𝑦𝑘+1,
ke persamaan (3.38) sehingga diperoleh
𝑦𝑘+1 =𝜆1𝑦𝑘
(𝜆1 − 𝑦𝑘𝜆2)𝑒−𝜆1Δ𝑡 + 𝜆2𝑦𝑘 , (3.39)
Persamaan (3.39) di atas adalah persamaan beda hingga eksak atau skema beda
hingga eksak yang sesuai untuk persamaan (3.37). Persamaan (3.39) dapat ditulis
ke dalam bentuk yang lebih konstruktif. Dengan melakukan operasi aljabar pada
persamaan (3.39) akan diperoleh persamaan sebagai berikut:
𝑦𝑘+1 − 𝑦𝑘
(𝑒𝜆1Δ𝑡 − 1
𝜆1)
= 𝜆1𝑦𝑘 − 𝜆2𝑦𝑘+1𝑦𝑘 . (3.40)
Sebagai catatan bahwa metode Euler maju untuk persamaan (3.37) adalah
𝑦𝑘+1 − 𝑦𝑘Δ𝑡
= 𝜆1𝑦𝑘 − 𝜆2𝑦𝑘𝑦𝑘 . (3.40a)
Persamaan (3.40a) akan menjadi pembanding metode beda hingga eksak untuk
menyelesaikan persamaan (3.37)
Selanjutnya akan dibahas skema beda hingga eksak untuk sistem dari dua
pasang persamaan diferensial biasa linear.
Dipandang sistem persamaan diferensial
𝑑𝑢
𝑑𝑡= 𝛼𝑢 + 𝛽𝑤,
(3.41a)
𝑑𝑤
𝑑𝑡= 𝛾𝑢 + 𝛿𝑤, (3.41b)
dengan kondisi nilai awal
𝑢0 = 𝑢(𝑡0), 𝑤0 = 𝑤(𝑡0),
dan syarat
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
𝛼𝛿 − 𝛽𝛾 ≠ 0.
Sebelum membahas skema beda eksak dari persamaan (3.41) di atas akan terlebih
dahulu dibahas penyelesaian umum dari persamaan (3.41) yang diperoleh secara
analitik.
Misalkan:
𝑢 = 𝐴𝑒𝜆𝑡 , 𝑣 = 𝐵𝑒𝜆𝑡 , (3.42)
𝑑𝑢
𝑑𝑡= 𝐴𝜆𝑒𝜆𝑡,
𝑑𝑣
𝑑𝑡= 𝐵𝜆𝑒𝜆𝑡 .
Jika persamaan (3.42) disubstitusikan ke persamaan (3.41) maka persamaan (3.41)
akan menjadi
𝐴𝜆𝑒𝜆𝑡 = 𝛼𝐴𝑒𝜆𝑡 + 𝛽𝐵𝑒𝜆𝑡 , (3.43)
𝐵𝜆𝑒𝜆𝑡 = 𝛾𝐴𝑒𝜆𝑡 + 𝛿𝐵𝑒𝜆𝑡,
atau
𝐴𝜆 = 𝛼𝐴 + 𝛽𝐵, (3.44)
𝐵𝜆 = 𝛾𝐴 + 𝛿𝐵,
atau
(𝜆 − 𝛼)𝐴 + 𝛽𝐵 = 0, (3.45)
𝛾𝐴 + (𝜆 − 𝛿)𝐵 = 0.
Selanjutnya akan dicari nilai eigen dari persamaan (3.45) diatas sehingga
berdasarkan persamaan (3.45) dapat membentuk matriks yang determinannya sama
dengan 0 yaitu
det [𝜆 − 𝛼 𝛽𝛾 𝜆 − 𝛿
] = 0. (3.46)
Persamaan (3.46) dapat diperluas menjadi suatu persamaan kuadrat, yaitu
𝜆2 − (𝛼 + 𝛿)𝜆 + (𝛼𝛿 − 𝛽𝛾) = 0,
dengan menggunakan rumus kuadratik dapat diperoleh nilai akar-akar dari
persamaan (3.47)
𝜆1,2 =(𝛼 + 𝛿) ± √(𝛼 + 𝛿)2 − 4(𝛼𝛿 − 𝛽𝛾)
2,
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

37
2𝜆1,2 = (𝛼 + 𝛿) ± √(𝛼 + 𝛿)2 − 4(𝛼𝛿 − 𝛽𝛾). (3.47)
Apabila nilai dari 𝜆1dan 𝜆2 disubstitusi ke persamaan (3.45) maka akan di peroleh
𝐴1 =𝛽
𝜆1 − 𝜆2, 𝐵1 =
𝜆1 − 𝛼
𝜆1 − 𝜆2,
(3.48)
𝐴2 = 𝛽
𝜆1 − 𝜆2, 𝐵2 =
𝜆2 − 𝛼
𝜆1 − 𝜆2.
Menurut Ross (1984:303) penyelesaian umum dari persamaan (3.41) dapat ditulis
ke dalam bentuk
𝑢(𝑡) = 𝑐1𝐴1𝑒𝜆1𝑡 + 𝑐2𝐴2𝑒
𝜆2𝑡, (3.49)
𝑤(𝑡) = 𝑐1𝐵1𝑒𝜆1𝑡 + 𝑐2𝐵2𝑒
𝜆2𝑡 .
Apabila persamaan (3.48) disubstitusi ke persamaan (3.49) maka akan diperoleh
𝑢(𝑡) = 𝑐1 (𝛽
𝜆1 − 𝜆2) 𝑒𝜆1𝑡 + 𝑐2 (
𝛽
𝜆1 − 𝜆2) 𝑒𝜆2𝑡 ,
(3.50)
𝑤(𝑡) = 𝑐1 (𝜆1 − 𝛼
𝜆1 − 𝜆2) 𝑒𝜆1𝑡 + 𝑐2 (
𝜆2 − 𝛼
𝜆1 − 𝜆2) 𝑒𝜆2𝑡 .
Diketahui bahwa kondisi nilai awal dari persamaan (3.41) adalah
𝑢0 = 𝑢(𝑡0), 𝑤0 = 𝑤(𝑡0),
dengan menggunakan kondisi nilai awal tersebut dapat dicari nilai dari 𝑐1dan 𝑐2,
sehingga dengan melakukan operasi aljabar akan diperoleh masing-masing
𝑐1 = −𝑢0𝑒
−𝜆1𝑡0(𝜆2 − 𝛼)
𝛽+ 𝑤0 dan 𝑐2 = (
𝑢0(𝜆1 − 𝛼)
𝛽− 𝑤0) 𝑒
−𝜆2𝑡0 .
Hasil dari substitusi nilai 𝑐1 dan 𝑐2 yang telah diperoleh ke persamaan (3.50) adalah
sebagai berikut:
𝑢(𝑡) = −(𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢0 −𝑤0] 𝑒
𝜆1(𝑡−𝑡0) + (𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽)𝑢0 −
𝑤0] 𝑒𝜆2(𝑡−𝑡𝑜),
(3.51a)
𝑤(𝑡) = −(𝜆1−𝛼
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢0 −𝑤0] 𝑒
𝜆1(𝑡−𝑡0) + (𝜆2−𝛼
𝜆1−𝜆2) [(
𝜆1−𝛼
𝛽)𝑢0 −
𝑤0] 𝑒𝜆2(𝑡−𝑡0),
(3.51b)
dimana
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
2𝜆1,2 = (𝛼 + 𝛿) ± √(𝛼 + 𝛿)2 − 4(𝛼𝛿 − 𝛽𝛾) .
Persamaan (3.51) di atas merupakan penyelesaian umum dari persamaan (3.41).
Skema beda eksak untuk persamaan (3.41) diperoleh dengan membuat substitusi
berikut pada persamaan (3.51a) dan persamaan (3.51b):
{
𝑡0 → 𝑡𝑘 = Δ𝑡(𝑘),
𝑡 → 𝑡𝑘+1 = Δ𝑡(𝑘 + 1),𝑢0 → 𝑢𝑘,
𝑢(𝑡) → 𝑢𝑘+1, 𝑤0 → 𝑤𝑘 ,
𝑤(𝑡) → 𝑤𝑘+1.
(3.52)
Hasil dari substitusi di atas adalah sebagai berikut:
𝑢𝑘+1 = −(𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢𝑘 −𝑤𝑘] 𝑒
𝜆1Δ𝑡 + (𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽)𝑢𝑘 −
𝑤𝑘] 𝑒𝜆2Δ𝑡 ,
(3.53a)
𝑤𝑘+1 = −(𝜆1−𝛼
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢𝑘 −𝑤𝑘] 𝑒
𝜆1Δ𝑡 + (𝜆2−𝛼
𝜆1−𝜆2) [(
𝜆1−𝛼
𝛽)𝑢𝑘 −
𝑤𝑘] 𝑒𝜆2Δ𝑡 .
(3.53b)
Dengan melakukan operasi aljabar pada persamaan (3.53a) dan persamaan (3.53b)
akan diperoleh persamaan sebagai berikut:
𝑢𝑘+1 −𝜓𝑢𝑘𝜙
= 𝛼𝑢𝑘 + 𝛽𝑤𝑘 , (3.54)
𝑤𝑘+1 −𝜓𝑤𝑘𝜙
= 𝛾𝑢𝑘 + 𝛿𝑤𝑘, (3.55)
dimana
𝜓 ≡ 𝜓(𝜆1, 𝜆2, Δ𝑡) =𝜆1𝑒
𝜆2Δ𝑡 − 𝜆2𝑒𝜆1Δ𝑡
𝜆1 − 𝜆2,
𝜙 ≡ 𝜙(𝜆1, 𝜆2, Δ𝑡) =𝑒𝜆1Δ𝑡 − 𝑒𝜆2Δ𝑡
𝜆1 − 𝜆2.
Ruas kiri dari persamaan (3.54) dan persamaan (3.55) merupakan turunan diskret
laju satu untuk persamaan (3.41a) dan persamaan (3.41b), yaitu
𝑑𝑢
𝑑𝑡→𝑢𝑘+1 − 𝜓𝑢𝑘
𝜙,
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

39
𝑑𝑤
𝑑𝑡→𝑤𝑘+1 −𝜓𝑤𝑘
𝜙.
3. Aturan Pemodelan Beda Hingga Nonstandar
Berdasarkan subbab sebelumnya yang membahas skema beda hingga eksak
untuk suatu persamaan diferensial khususnya persamaan diferensial biasa,
diberikan aturan atau syarat untuk mengkonstruksi model-model diskret yang
berlaku untuk persamaan diferensial biasa dan persamaan diferensial parsial,
sebagai berikut:
1. Orde dari turunan diskret harus persis sama dengan orde dari turunan
persamaan diferensial terkait.
2. Fungsi penyebut untuk turunan diskret harus secara umum dinyatakan dalam
bentuk fungsi yang lebih rumit dari selisih jarak atau Δ𝑡 yang biasa digunakan.
Misalkan pada contoh 1, 2 dan 3 fungsi penyebut untuk turunan diskretnya
adalah ( 1−𝑒−𝜆Δ𝑡
𝜆) , 4sin2 (
Δ𝑡
2), 𝑒𝜆1Δ𝑡−1
𝜆1.
3. Bentuk nonlinear harus secara umum dimodelkan secara nonlokal pada
komputasi grid atau kisi. Misalnya pada persamaan (3.2.5) pada contoh 3
bentuk 𝑦2 diaproksimasi pada dua titik yang berbeda
𝑦2 → 𝑦𝑘+1𝑦𝑘 ,
dengan indeks 𝑘 bersesuaian dengan langkah variabel bebasnya. Hal ini juga
berlaku untuk persamaan diferensial parsial nonlinear misalnya bentuk 𝑢2
diaproksimasi pada dua titik yang berbeda yaitu
𝑢2 → 𝑢𝑚−1𝑘 𝑢𝑚
𝑘+1,
dengan indeks 𝑘 dan 𝑚 bersesuaian dengan langkah dari dua variabel bebas
yang berbeda.
4. Penyelesaian khusus dari persamaan diferensial juga harus menjadi
penyelesaian diskret dari model-model beda hingga.
5. Persamaan beda hingga seharusnya tidak memiliki penyelesaian yang tidak
sesuai dengan penyelesaian dari persamaan diferensial.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

40
4. Perbandingan Penyelesaian
Pada bagian ini akan dibandingkan penyelesaian metode Euler, metode Heun,
beda hingga standar dan penyelesaian dari metode beda hingga eksak dengan
menggunakan program MATLAB. Akan dilihat dari ketiga penyelesaian tersebut
yang mendekati penyelesaian eksaknya atau penyelesaian yang diperoleh secara
analitik. Untuk membandingkan penyelesaian ini akan digunakan contoh 1 yaitu
persamaan (3.26), contoh 2 persamaan (3.30) dan contoh 3 yaitu persamaan (3.37).
Contoh 1
Diketahui persamaan diferensial dengan suatu nilai awal
𝑑𝑦
𝑑𝑡= −𝑦, 𝑦(0) = 1. (3.56)
Akan dicari nilai 𝑦1, 𝑦2, 𝑦3, … , 𝑦10 dari penyelesaian analitik dan penyelesaian dari
metode Euler, metode Heun, dan metode beda hingga eksak.
Penyelesaian eksak dari persamaan diferensial di atas adalah
𝑦 = 𝑒−𝑡 ,
penyelesaian yang dihasilkan dengan menggunakan metode Euler untuk persamaan
di atas adalah
𝑦𝑘+1 = −Δ𝑡𝑦𝑘 + 𝑦𝑘 .
Penyelesaian yang dihasilkan dengan menggunakan metode Heun untuk persamaan
di atas adalah
�̃�𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑓(𝑡𝑘, 𝑦𝑘),
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2(𝑓(𝑡𝑘, 𝑦𝑘 + 𝑓(𝑡𝑘+1, �̃�𝑘+1),
dengan 𝑓(𝑡, 𝑦) = −𝑦.
Sedangkan penyelesaian yang dihasilkan dengan menggunakan metode beda
hingga eksak adalah
𝑦𝑘+1 = 𝑒−Δ𝑡𝑦𝑘 .
Gambar 3.4.1 menunjukkan grafik hasil simulasi dari metode Euler, metode Heun,
dan metode beda hingga eksak dengan nilai awal 𝑦(0) = 1 dan Δ𝑡 = 0.1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
Gambar 3.4.1 Grafik simulasi numeris persamaan (3.56) dengan menggunakan
metode Euler, metode Heun dan metode beda hingga eksak
dengan 𝑦(0) = 1 dan 𝛥𝑡 = 0.1.
Pada Gambar 3.4.1 dilihat bahwa grafik penyelesaian metode Heun, metode
beda hingga eksak dan penyelesaian eksaknya berimpit. Namun demikian, ketika
gambar tersebut diperbesar maka kita akan peroleh grafik seperti tampak pada
Gambar 3.4.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

42
Gambar 3.4.2 Grafik simulasi numeris persamaan (3.56) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 0.585, 0.615 dan
0.468, 0.502.
Pada Gambar 3.4.2 grafik penyelesaian dari metode Heun sudah tidak
berhimpit lagi dengan penyelesaian eksaknya dan juga tidak berimpit dengan
penyelesaian metode beda hingga eksak. Namun demikian, pada Gambar 3.4.2
grafik penyelesaian eksak masih berhimpit dengan penyelesaian metode beda
hingga eksak. Pada Gambar 3.4.2 juga menunjukkan bahwa dari 3 metode tersebut
penyelesaian yang paling mendekati penyelesaian eksaknya adalah metode beda
hingga eksak. Hal ini juga ditunjukkan dari error hasil perhitungan numerik pada
Tabel 3.4.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

43
Tabel 3.4.1 Error hasil perhitungan dari persamaan (3.56)
t Euler Heun Beda hingga
eksak
0.1 0.004837 0.000163 0.000000
0.2 0.008731 0.000294 0.000000
0.3 0.011818 0.000399 0.000000
0.4 0.014220 0.000482 0.000000
0.5 0.016041 0.000545 0.000000
0.6 0.017371 0.000592 0.000000
0.7 0.018288 0.000625 0.000000
0.8 0.018862 0.000646 0.000000
0.9 0.019149 0.000658 0.000000
1.0 0.019201 0.000662 0.000000
Rata-rata
error
𝟎.𝟎𝟏𝟒𝟖𝟓𝟐
𝟎.𝟎𝟎𝟎𝟓𝟎𝟕
𝟎
Error hasil perhitungan pada Tabel 3.4.1 menunjukkan error dari penyelesaian
metode beda hingga eksak adalah nol. Hal ini menunjukkan bahwa dari ketiga
metode yaitu metode Euler, metode Heun dan metode beda hingga eksak yang
penyelesaiannya paling mendekati dengan penyelesaian eksak untuk persamaan
(3.56) adalah metode beda hingga eksak sesuai dengan yang ditunjukkan pada
Gambar 3.41 dan 3.4.2.
Pada contoh selanjutnya akan dibandingkan penyelesaian dari metode beda
hingga standar dengan penyelesaian dari metode beda hingga eksak untuk
persamaan diferensial orde dua. Persamaan yang akan digunakan adalah persamaan
(3.30) pada contoh 2. Akan dilihat apakah untuk persamaan diferensial orde dua ini
penyelesaian dari metode beda hingga eksak akan sama dengan penyelesaian
eksaknya atau tidak.
Contoh 2
Diketahui persamaan diferensial beserta nilai awalnya
𝑑2𝑦
𝑑𝑡2+ 𝑦 = 0, 𝑦(0) = 1, 𝑦′(0) = 1.
(3.57)
Akan dicari nilai 𝑦1, 𝑦2, 𝑦3, … , 𝑦10 dari penyelesaian analitik dan penyelesaian dari
metode Euler dan metode beda hingga eksak.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

44
Penyelesaian eksak untuk persamaan (3.57) adalah
𝑦 = cos(𝑡) + sin(𝑡),
penyelesaian yang dihasilkan untuk persamaan (3.57) dengan metode beda hingga
standar adalah
𝑦𝑘+1 = (2 − Δ𝑡2)𝑦𝑘 − 𝑦𝑘−1,
dan penyelesaian yang dihasilkan dengan menggunakan metode beda hingga eksak
adalah
𝑦𝑘+1 = (2 − 4sin2 (Δ𝑡
2)𝑦𝑘) − 𝑦𝑘−1.
Gambar 3.4.2 grafik hasil simulasi dari metode beda hingga standar dan metode
beda hingga eksak dengan nilai awal 𝑦(0) = 1, 𝑦′(0) = 1 dan Δ𝑡 = 0.1.
Gambar 3.4.3 Grafik simulasi numeris persamaan (3.57) dengan menggunakan
metode beda hingga standar dan metode beda hingga eksak
dengan 𝑦(0) = 1, 𝑦′(0) = 1, dan 𝛥𝑡 = 0.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
Pada Gambar 3.4.3 di atas terlihat seperti ketiga grafik penyelesaian tersebut
berimpit dan hanya terlihat satu grafik saja yaitu grafik dari penyelesaian beda
eksak. Namun demikian, ketika gambar diperbesar maka kita akan peroleh grafik
seperti tampak pada Gambar 3.4.4.
Gambar 3.4.4 Grafik simulasi numeris persamaan (3.57) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 1.39, 1.415 dan
0.59, 0.95.
Pada Gambar 3.4.4 bisa dilihat bahwa penyelesaian dari metode beda hingga
eksak masih tetap berimpit dengan grafik penyelesaian eksaknya. Berdasarkan
Gambar 3.4.4 grafik dari penyelesaian beda eksak lebih mendekati penyelesaian
eksak dibandingkan dengan grafik penyelesaian metode beda hingga standar. Hal
ini juga ditunjukkan dari error hasil perhitungan numerik pada Tabel 3.4.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

46
Tabel 3.4.2 Error hasil perhitungan dari persamaan (3.57)
𝒕 Beda hingga
standar
Beda hingga
eksak
0.1 0.000000 0.000000
0.2 0.000009 0.000000
0.3 0.000028 0.000000
0.4 0.000057 0.000000
0.5 0.000096 0.000000
0.6 0.000146 0.000000
0.7 0.000206 0.000000
0.8 0.000275 0.000000
0.9 0.000354 0.000000
1.0 0.000440 0.000000
Rata-rata
error
𝟎. 𝟎𝟎𝟎𝟏𝟔𝟏
𝟎
Error hasil perhitungan pada Tabel 3.4.2 juga menunjukkan bahwa nilai error
penyelesaian eksak dengan nilai penyelesaian beda eksak adalah nol. Sehingga
dapat disimpulkan bahwa dari kedua metode yaitu metode beda standar dan metode
beda hingga eksak yang penyelesaiannya paling mendekati dengan penyelesaian
eksak untuk persamaan (3.57) adalah metode beda hingga eksak.
Pada contoh selanjutnya, akan dibandingkan penyelesaian dari metode Euler,
metode Heun dan metode beda hingga eksak dengan penyelesaian eksaknya untuk
persamaan diferensial nonlinear. Persamaan yang akan digunakan adalah
persamaan (3.37) pada contoh 3.
Contoh 3
Diketahui persamaan diferensial dan suatu nilai awal
𝑑𝑦
𝑑𝑡= 𝜆1𝑦 − 𝜆2𝑦
2, 𝑦(0) = 1; (3.58)
dengan 𝜆1 = 1, dan 𝜆2 = 2.
Akan dicari nilai 𝑦1, 𝑦2, 𝑦3, … , 𝑦10 dari penyelesaian analitik dan penyelesaian dari
metode Euler, metode Heun dan metode beda hingga eksak.
Penyelesaian eksak untuk persamaan (3.51) adalah
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

47
𝑦 =𝜆1𝑦0
(𝜆1 − 𝑦0𝜆2)𝑒𝜆1𝑡 + 𝜆2𝑦0 ,
penyelesaian yang dihasilkan untuk persamaan (3.51) dengan metode Euler adalah
𝑦𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑦𝑘(𝜆1 − 𝜆2𝑦𝑘),
dan penyelesaian yang dihasilkan dengan menggunakan metode beda hingga eksak
adalah
𝑦𝑘+1 =𝜆1𝑦𝑘
(𝜆1 − 𝑦𝑘𝜆2)𝑒−𝜆1Δ𝑡 + 𝜆2𝑦𝑘.
Sedangkan penyelesaian yang dihasilkan dengan metode Heun adalah
�̃�𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑓(𝑡𝑘 , 𝑦𝑘),
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2(𝑓(𝑡𝑘, 𝑦𝑘) + 𝑓(𝑡𝑘+1, �̃�𝑘+1)),
dengan 𝑓(𝑡, 𝑦) = 𝜆1𝑦 − 𝜆2𝑦2.
Gambar 3.4.5 menunjukkan grafik hasil simulasi dari metode Euler, metode Heun,
dan metode beda hingga eksak dengan nilai awal 𝑦(0) = 1 dan Δ𝑡 = 0.1
Gambar 3.4.5 Grafik simulasi numeris persamaan (3.58) dengan menggunakan
metode Euler, metode Heun dan metode beda hingga eksak
dengan 𝑦(0) = 1, 𝛥𝑡 = 0.1 dan 𝜆1 = 1 dan 𝜆2 = 2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
Pada Gambar 3.4.5 dapat dilihat bahwa grafik penyelesaian metode Heun dan
metode beda hingga eksak berimpit dengan penyelesain eksaknya sehingga terlihat
seperti satu garis. Namun demikian, ketika gambar diperbesar maka kita akan
memperoleh grafik seperti tampak pada Gambar 3.4.6.
Gambar 3.4.6 Grafik simulasi numeris persamaan (3.58) dengan batas minimum
dan maksimum sumbu-y dan sumbu-x adalah 0.68, 0.76 dan
0.35, 0.65.
Pada Gambar 3.4.6 terlihat bahwa grafik penyelesaian dari metode Heun tidak
lagi berimpit dengan grafik penyelesaian eksak dan grafik penyelesaian metode
beda hingga eksak. Hal ini menunjukkan bahwa dari ketiga metode tersebut grafik
penyelesaian yang paling mendekati penyelesaian eksaknya adalah garfik
penyelesaian metode beda hingga eksak. Hal ini juga ditunjukkan dari hasil
perhitungan numerik pada Tabel 3.4.3.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

49
Tabel 3.4.3 Error hasil perhitungan dari persamaan (3.58)
t Euler Heun
Beda
hingga
eksak
0.1 0.013106 0.000894 0.000000
0.2 0.018547 0.001251 0.000000
0.3 0.020483 0.001362 0.000000
0.4 0.020726 0.001357 0.000000
0.5 0.020135 0.001297 0.000000
0.6 0.019143 0.001214 0.000000
0.7 0.017977 0.001123 0.000000
0.8 0.016756 0.001032 0.000000
0.9 0.015547 0.000945 0.000000
1.0 0.014383 0.000863 0.000000
Rata-rata
error
𝟎. 𝟎𝟏𝟕𝟔𝟖
𝟎.𝟎𝟎𝟏𝟏𝟑𝟒
𝟎
Error hasil perhitungan pada Tabel 3.4.3 menunjukan bawha error dari
penyelesaian metode beda hingga eksak adalah nol. Oleh karena itu, dapat
disimpulkan bahwa dari ketiga metode yaitu metode Euler, metode Heun dan
metode beda hingga eksak yang penyelesaiannya paling mendekati dengan
penyelesaian eksak untuk persamaan (3.58) adalah metode beda hingga eksak
sesuai dengan yang ditunjukkan pada Gambar 3.4.4 dan 3.4.3.
Hasil perbandingan penyelesaian dari metode Euler, metode Heun, metode
beda hingga standar dan metode beda hingga eksak untuk ketiga contoh di atas
menunjukkan bahwa hasil penyelesaian dari metode beda hinggak eksak lebih
mendekati penyelesaian eksaknya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

50
BAB IV
PENYELESAIAN NUMERIS SISTEM PERSAMAAN DIFERENSIAL
LOTKA-VOLTERRA TERMODIFKASI
Pada bab ini akan dibahas penyelesaian dari model persamaan diferensial
Lotka-Volterra termodifikasi untuk kasus kompetisi, bagaimana mengkonstruksi
skema beda hingga eksaknya, simulasi numeriknya menggunakan MATLAB dan
perbandingan penyelesaian beda hingga eksak dengan metode Euler dan metode
Heun.
A. Penyelesaian Numeris Sistem Persamaan Diferensial Lotka-Volterra
Termodifikasi dengan Metode Beda Hingga Eksak
Sebelum membahas skema beda hingga eksak dari persamaan diferensial
Lotka-Volterra termodifikasi akan terlebih dahulu membahas transformasi linear
dari persamaan diferensial Lotka-Volterra termodifikasi untuk kasus kompetisi dan
penyelesaian umumnya.
Pada bab 3 kita telah peroleh persamaan diferensial Lotka-Volterra termodifikasi
untuk kasus kompetisi adalah sebagai berikut
𝑑𝑥
𝑑𝑡= 𝑟1√𝑥 − 𝑎11𝑥 − 𝑎12√𝑥√𝑦,
(4.1a)
𝑑𝑦
𝑑𝑡= 𝑟2√𝑦 − 𝑎21√𝑥√𝑦 − 𝑎22𝑦,
(4.1b)
dimana
𝑥(0) = 𝑥0 > 0, 𝑦(0) = 𝑦0 > 0,
yang berakibat (Mickens, 2018)
𝑥(𝑡) ≥ 0, 𝑦(𝑡) ≥ 0.
Akan dibuat transformasi nonlinear untuk persamaan (4.1) di atas dengan pemisalan
𝑢 = √𝑥 dan 𝑣 = √𝑦. Dikerjakan terlebih dahulu untuk pemisalan
𝑢 = √𝑥, (4.2)
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

51
𝑢2 = 𝑥. (4.3)
Jika kedua ruas pada persamaan (4.3) diturunkan masing-masing terhadap 𝑢 dan 𝑥
maka akan diperoleh
2𝑢 𝑑𝑢 = 𝑑𝑥, (4.4)
atau
2𝑢𝑑𝑢
𝑑𝑡=𝑑𝑥
𝑑𝑡, (4.5)
atau
𝑑𝑢
𝑑𝑡=1
2𝑢
𝑑𝑥
𝑑𝑡 , (4.6)
atau
𝑑𝑢
𝑑𝑡=1
2𝑢(𝑟1√𝑥 − 𝑎11𝑥 − 𝑎12√𝑥√𝑦), (4.7)
Selanjutnya substitusi pemisalan 𝑢 dan 𝑣 ke persamaan (4.7) akan diperoleh
𝑑𝑢
𝑑𝑡=1
2𝑢(𝑟1𝑢 − 𝑎11𝑢
2 − 𝑎12𝑢𝑣),
atau
𝑑𝑢
𝑑𝑡= (
𝑟12−𝑎11𝑢
2−𝑎12𝑣
2). (4.8)
Dengan cara yang sama dikerjakan untuk pemisalan 𝑣 = √𝑦
𝑣 = √𝑦
atau
𝑣2 = 𝑦. (4.9)
Jika kedua ruas pada persamaan (4.9) diturunkan masing-masing terhadap 𝑣 dan 𝑥
maka akan diperoleh
2𝑣 𝑑𝑣 = 𝑑𝑦, (4.10)
atau
2𝑣𝑑𝑣
𝑑𝑡=𝑑𝑦
𝑑𝑡, (4.11)
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

52
𝑑𝑢
𝑑𝑡=1
2𝑣
𝑑𝑦
𝑑𝑡 , (4.12)
atau
𝑑𝑣
𝑑𝑡=1
2𝑣 (𝑟2√𝑦 − 𝑎21√𝑥√𝑦 − 𝑎22𝑦). (4.13)
Selanjutnya substitusi pemisalan 𝑢 dan 𝑣 ke persamaan (4.13) akan diperoleh
𝑑𝑣
𝑑𝑡=1
2𝑣(𝑟2𝑣 − 𝑎21𝑢𝑣 − 𝑎22𝑣
2),
atau
𝑑𝑣
𝑑𝑡= (
𝑟22−𝑎21𝑢
2−𝑎22𝑣
2). (4.14)
Berdasarkan transformasi nonlinear di atas persamaan (4.1) menjadi
𝑑𝑢
𝑑𝑡= 𝑟1
′ − 𝑎11′ 𝑢 − 𝑎12
′ 𝑣, (4.15a)
𝑑𝑣
𝑑𝑡= 𝑟2
′ − 𝑎21′ 𝑢 − 𝑎22
′ 𝑣, (4.15b)
dimana 𝑟1′ =
𝑟1
2, 𝑎11′ =
𝑎11
2, 𝑎12′ =
𝑎12
2, 𝑟2′ =
𝑟2
2, 𝑎21
′ =𝑎21
2, dan 𝑎22
′ =𝑎22
2.
Berdasarkan persamaan (4.15) dapat dicari titik setimbang atau ekuilibrium dari
persamaan tersebut. Persamaan (4.15) dikatakan setimbang jika 𝑑𝑢
𝑑𝑡= 0 dan
𝑑𝑣
𝑑𝑡= 0.
Sehingga persamaan (4.15) dapat ditulis
𝑟1′ − 𝑎11
′ 𝑢 − 𝑎12′ 𝑣 = 0, (4.16a)
𝑟2′ − 𝑎21
′ 𝑢 − 𝑎22′ 𝑣 = 0. (4.16b)
Persamaan (4.16a) dapat ditulis
𝑟1′ − 𝑎11
′ 𝑢 = 𝑎12′ 𝑣, (4.17)
atau
𝑣 =𝑟1′ − 𝑎11
′ 𝑢
𝑎12′ , (4.18)
dan persamaan (4.16b) dapat ditulis
𝑟2′ − 𝑎22
′ 𝑣 = 𝑎21′ 𝑢, (4.19)
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

53
𝑢 =𝑟2′ − 𝑎22
′ 𝑣
𝑎21′ . (4.20)
Jika persamaan (4.18) dan (4.20) masing-masing disubstitusikan ke persamaan
(4.16b) dan (4.16a) akan diperoleh
𝑢∗ =𝑎12𝑟2 − 𝑎22𝑟1𝑎12𝑎21 − 𝑎11𝑎22
,
dan
𝑣∗ =𝑎21𝑟1 − 𝑎11𝑟2𝑎11𝑎22 − 𝑎21𝑎22
,
dengan demikian titik setimbang atau titik ekuilibrium dari persamaan (4.15) adalah
(𝑢∗, 𝑣∗).
Misalkan 𝑤 dan 𝑣 didefinisikan sebagai berikut
𝑢 = 𝑢∗ +𝑤, 𝑣 = 𝑣∗ + 𝑧 ,
maka akan dilakukan transformasi linear sebagai berikut
𝑢 = 𝑢∗ +𝑤, (4.21)
jika ruas kanan dan kiri pada persamaan (4.21) diturunkan terhadap 𝑡, maka
dihasilkan
𝑑𝑢
𝑑𝑡=𝑑𝑢∗
𝑑𝑡+𝑑𝑤
𝑑𝑡, (4.22)
atau
𝑑𝑢
𝑑𝑡−𝑑𝑢∗
𝑑𝑡=𝑑𝑤
𝑑𝑡. (4.23)
Setelah itu akan disubstitusikan persamaan (4.15a) ke persamaan (4.22) akan
menghasilkan
(𝑟1′ − 𝑎11
′ 𝑢 − 𝑎12′ 𝑣) −
𝑑𝑢∗
𝑑𝑡=𝑑𝑤
𝑑𝑡, (4.24)
atau
(𝑟1′ − 𝑎11
′ (𝑢∗ + 𝑤) − 𝑎12′ (𝑣∗ + 𝑧)) − (𝑟1
′ − 𝑎11′ 𝑢∗ − 𝑎12
′ 𝑣∗) =𝑑𝑤
𝑑𝑡, (4.25)
atau
𝑟1′ − 𝑎11
′ 𝑢∗ − 𝑎11′ 𝑤 − 𝑎12
′ 𝑣∗ − 𝑎12′ 𝑧−𝑟1
′ + 𝑎11′ 𝑢∗ + 𝑎12
′ 𝑣∗ =𝑑𝑤
𝑑𝑡, (4.26)
atau
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

54
−𝑎11′ 𝑤 − 𝑎12
′ 𝑧 =𝑑𝑤
𝑑𝑡. (4.27)
Selanjutnya, yaitu
𝑣 = 𝑣∗ + 𝑧, (4.28)
jika ruas kanan dan kiri pada persamaan (4.28) diturunkan terhadap 𝑡, maka
dihasilkan
𝑑𝑣
𝑑𝑡=𝑑𝑣∗
𝑑𝑡+𝑑𝑧
𝑑𝑡, (4.29)
atau
𝑑𝑣
𝑑𝑡−𝑑𝑣∗
𝑑𝑡=𝑑𝑧
𝑑𝑡, (4.30)
Setelah itu akan disubstitusikan persamaan (4.15b) ke persamaan (4.30) akan
menghasilkan
(𝑟2′ − 𝑎21
′ 𝑢 − 𝑎22′ 𝑣) −
𝑑𝑣∗
𝑑𝑡=𝑑𝑧
𝑑𝑡, (4.31)
atau
(𝑟2′ − 𝑎21
′ (𝑢∗ + 𝑤) − 𝑎22′ (𝑣∗ + 𝑧)) − (𝑟2
′ − 𝑎21′ 𝑢∗ − 𝑎22
′ 𝑣∗) =𝑑𝑧
𝑑𝑡, (4.32)
atau
𝑟2′ − 𝑎21
′ 𝑢∗ − 𝑎21′ 𝑤 − 𝑎22
′ 𝑣∗ − 𝑎22′ 𝑧 − 𝑟2
′ + 𝑎21′ 𝑢∗ + 𝑎22
′ 𝑣∗ =𝑑𝑧
𝑑𝑡, (4.33)
atau
−𝑎21′ 𝑤 − 𝑎22
′ 𝑧 =𝑑𝑧
𝑑𝑡. (4.34)
Berdasarkan hasil transformasi linear di atas persamaan (4.15a) dan (4.15b)
menjadi
𝑑𝑤
𝑑𝑡= −𝑎11
′ 𝑤 − 𝑎12′ 𝑧 (4.35a)
𝑑𝑧
𝑑𝑡= −𝑎21
′ 𝑤 − 𝑎22′ 𝑧. (4.35b)
Dapat dilihat bahwa persamaan (4.35) merupakan sistem persamaan diferensial
linear orde satu.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

55
Pada bab III telah dibahas bagaimana memperoleh penyelesaian dari suatu
sistem persamaan diferensial linear orde satu secara analitik. Penyelesaian umum
untuk sistem persamaan diferensial linear orde satu yang ditunjukkan oleh
persamaan (3.41) adalah
𝑢(𝑡) = −(𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢0 −𝑤0] 𝑒
𝜆1(𝑡−𝑡0) + (𝛽
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽)𝑢0 −
𝑤0] 𝑒𝜆2(𝑡−𝑡𝑜),
(4.36a)
𝑤(𝑡) = −(𝜆1−𝛼
𝜆1−𝜆2) [(
𝜆2−𝛼
𝛽) 𝑢0 −𝑤0] 𝑒
𝜆1(𝑡−𝑡0) + (𝜆2−𝛼
𝜆1−𝜆2) [(
𝜆1−𝛼
𝛽)𝑢0 −
𝑤0] 𝑒𝜆2(𝑡−𝑡0),
(3.36b)
dimana
2𝜆1,2 = (𝛼 + 𝛿) ± √(𝛼 + 𝛿)2 − 4(𝛼𝛿 − 𝛽𝛾) .
Berdasarkan penyelesaian umum untuk sistem persamaan diferensial linear orde
satu pada persamaan (3.46) di atas maka penyelesaian untuk persamaan (4.35)
diperoleh dengan cara mensubstitusi nilai 𝛽 dan 𝛼 masing-masing −𝑎12′ dan −𝑎11
′
adalah
𝑤(𝑡) = −(−𝑎12
′
𝜆1−𝜆2) [(
𝜆2−(−𝑎11′ )
−𝑎12′ )𝑤0 − 𝑧0] 𝑒
𝜆1(𝑡−𝑡0) +
(−𝑎12
′
𝜆1−𝜆2) [(
𝜆2−(−𝑎11′ )
−𝑎12′ )𝑤0 − 𝑧0] 𝑒
𝜆2(𝑡−𝑡𝑜),
(4.36a)
𝑧(𝑡) = −(𝜆1−(−𝑎11
′ )
𝜆1−𝜆2) [(
𝜆2−(−𝑎11′ )
−𝑎12′ )𝑤0 − 𝑧0] 𝑒
𝜆1(𝑡−𝑡0) +
(𝜆2−(−𝑎11
′ )
𝜆1−𝜆2) [(
𝜆1−(−𝑎11′ )
−𝑎12′ )𝑤0 − 𝑧0] 𝑒
𝜆2(𝑡−𝑡0),
(4.36b)
atau
𝑤(𝑡) = −(𝑎12′
𝜆1−𝜆2) [(
𝜆2+𝑎11′
𝑎12′ )𝑤0 + 𝑧0] 𝑒
𝜆1(𝑡−𝑡0) +
(𝑎12′
𝜆1−𝜆2) [(
𝜆2+𝑎11′
𝑎12′ )𝑤0 + 𝑧0] 𝑒
𝜆2(𝑡−𝑡𝑜),
(4.36a)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

56
𝑧(𝑡) = (𝜆1+𝑎11
′
𝜆1−𝜆2) [(
𝜆2+𝑎11′
𝑎12′ )𝑤0 + 𝑧0] 𝑒
𝜆1(𝑡−𝑡0) −
(𝜆2+𝑎11
′
𝜆1−𝜆2) [(
𝜆1+𝑎11′
𝑎12′ )𝑤0 + 𝑧0] 𝑒
𝜆2(𝑡−𝑡0).
(4.36b)
Berdasarkan pada bab III kita peroleh persamaan beda eksak untuk persamaan
(4.36) adalah
𝑤𝑘+1 −𝜓𝑤𝑘𝜙
= −𝑎11′ 𝑢𝑘 − 𝑎12
′ 𝑧𝑘, (4.37a)
𝑧𝑘+1 − 𝜓𝑧𝑘𝜙
= −𝑎21′ 𝑤𝑘 − 𝑎22
′ 𝑧𝑘, (4.37b)
dimana
𝜓 ≡ 𝜓(𝜆1, 𝜆2, Δ𝑡) =𝜆1𝑒
𝜆2Δ𝑡 − 𝜆2𝑒𝜆1Δ𝑡
𝜆1 − 𝜆2,
𝜙 ≡ 𝜙(𝜆1, 𝜆2, Δ𝑡) =𝑒𝜆1Δ𝑡 − 𝑒𝜆2Δ𝑡
𝜆1 − 𝜆2,
𝑡𝑘 = Δ𝑡𝑘; 𝑤𝑘 = 𝑤(𝑡𝑘), 𝑧𝑘 = 𝑧(𝑡𝑘); 𝑘 = 0, 1, 2,…
dan
2𝜆1,2 = −(𝑎11′ + 𝑎22
′ ) ± √(𝑎11′ + 𝑎22
′ )2 − 4(𝑎11′ 𝑎22
′ − 𝑎12′ 𝑎21
′ ) .
Jika kita mendefinisikan
𝜓1 = 𝜓 − 1
maka persamaan (4.37) menjadi sebagai berikut
𝑤𝑘+1 − (𝜓1 + 1)𝑤𝑘𝜙
= −𝑎11′ 𝑤𝑘 − 𝑎12
′ 𝑧𝑘 , (4.38a)
𝑧𝑘+1 − (𝜓1 + 1)𝑧𝑘𝜙
= −𝑎21′ 𝑤𝑘 − 𝑎22
′ 𝑧𝑘 , (4.38b)
atau
𝑤𝑘+1 −𝑤𝑘𝜙
=𝜓1𝑤𝑘𝜙
− 𝑎11′ 𝑤𝑘 − 𝑎12
′ 𝑧𝑘 , (4.39a)
𝑧𝑘+1 − 𝑧𝑘𝜙
=𝜓1𝑧𝑘𝜙
− 𝑎21′ 𝑤𝑘 − 𝑎22
′ 𝑧𝑘, (4.39b)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

57
atau
𝑤𝑘+1 −𝑤𝑘𝜙
= (𝜓1𝜙− 𝑎11
′ )𝑤𝑘 − 𝑎12′ 𝑧𝑘 ,
(4.40a)
𝑧𝑘+1 − 𝑧𝑘𝜙
= −𝑎21′ 𝑤𝑘 + (
𝜓1𝜙− 𝑎22
′ ) 𝑧𝑘. (4.40b)
Selanjutnya jika kita mengganti (𝑤, 𝑧) dengan (𝑢, 𝑣) maka persamaan (4.40) akan
menjadi
(𝑢𝑘+1 − 𝑢∗) − (𝑢𝑘 − 𝑢
∗)
𝜙= (
𝜓1𝜙− 𝑎11
′ ) (𝑢𝑘 − 𝑢∗) − 𝑎12
′ (𝑣𝑘 − 𝑣∗), (4.41a)
(𝑣𝑘+1 − 𝑣∗) − (𝑣𝑘 − 𝑣
∗)
𝜙= −𝑎21
′ (𝑢𝑘 − 𝑣∗) + (
𝜓1𝜙− 𝑎22
′ ) (𝑣𝑘 − 𝑣∗), (4.41b)
atau
𝑢𝑘+1 − 𝑢𝑘
𝜙= (
𝜓1𝜙− 𝑎11
′ ) 𝑢𝑘 − (𝜓1𝜙− 𝑎11
′ ) 𝑢∗ − 𝑎12′ 𝑣𝑘 + 𝑎12
′ 𝑣∗, (4.42a)
𝑣𝑘+1 − 𝑣𝑘𝜙
= −𝑎21′ 𝑢𝑘 + 𝑎21
′ 𝑣∗ + (𝜓1𝜙− 𝑎22
′ ) 𝑣𝑘 − (𝜓1𝜙− 𝑎22
′ ) 𝑣∗, (4.42b)
atau
𝑢𝑘+1 − 𝑢𝑘
𝜙= (
𝜓1𝜙− 𝑎11
′ ) 𝑢𝑘 − 𝑎12′ 𝑣𝑘 + [− (
𝜓1𝜙− 𝑎11
′ ) 𝑢∗ + 𝑎12′ 𝑣∗], (4.43a)
𝑣𝑘+1 − 𝑣𝑘𝜙
= −𝑎21′ 𝑢𝑘 + (
𝜓1𝜙− 𝑎22
′ ) 𝑣𝑘 + [𝑎21′ 𝑢∗ − (
𝜓1𝜙− 𝑎22
′ ) 𝑣∗] (4.43b)
atau
𝑢𝑘+1 = 𝜙 (𝜓1𝜙− 𝑎11
′ ) 𝑢𝑘 −𝜙𝑎12′ 𝑣𝑘 +𝜙 [−(
𝜓1𝜙− 𝑎11
′ ) 𝑢∗ + 𝑎12′ 𝑣∗] + 𝑢𝑘 ,
(4.44a)
𝑣𝑘+1 = −𝜙𝑎21′ 𝑢𝑘 + 𝜙(
𝜓1𝜙− 𝑎22
′ ) 𝑣𝑘 + 𝜙 [𝑎21′ 𝑢∗ − (
𝜓1𝜙− 𝑎22
′ ) 𝑣∗] + 𝑣𝑘 (4.44b)
Persamaan (4.44) di atas merupakan skema beda hingga eksak untuk persamaan
(4.35).
Untuk membangun diskretisasi yang tepat dan sesuai untuk pesamaan (4.1) kita
mengalikan kedua ruas masing-masing pada persamaan (4.43a) dan (4.43b) dengan
(𝑢𝑘+1 + 𝑢𝑘) dan (𝑣𝑘+1 + 𝑣𝑘)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

58
(𝑢𝑘+1 − 𝑢𝑘)(𝑢𝑘+1 + 𝑢𝑘)
𝜙= (
𝜓1
𝜙− 𝑎11
′ ) 𝑢𝑘(𝑢𝑘+1 + 𝑢𝑘) − 𝑎12′ 𝑣𝑘(𝑢𝑘+1 +
𝑢𝑘) + [− (𝜓1
𝜙− 𝑎11
′ ) 𝑢∗ + 𝑎12′ 𝑣∗] (𝑢𝑘+1 + 𝑢𝑘)
(4.45a)
(𝑣𝑘+1 − 𝑣𝑘)(𝑣𝑘+1 + 𝑣𝑘)
𝜙= −𝑎21
′ 𝑢𝑘(𝑣𝑘+1 + 𝑣𝑘) + (𝜓1
𝜙− 𝑎22
′ ) 𝑣𝑘(𝑣𝑘+1 +
𝑣𝑘) + [𝑎21′ 𝑢∗ − (
𝜓1
𝜙− 𝑎22
′ ) 𝑣∗] (𝑣𝑘+1 + 𝑣𝑘)
(4.45b)
Setelah memperoleh persamaan (4.45) selanjutnya substitusikan bentuk 𝑢𝑘 =
√𝑥𝑘, 𝑣𝑘 = √𝑦𝑘 , 𝑢𝑘+1 = √𝑥𝑘+1 ke persamaan (4.45) sehingga memperoleh hasil
𝑥𝑘+1 − 𝑥𝑘
𝜙=
[(𝑎11 −2𝜓1𝜙)𝑢∗ + 𝑎12𝑣
∗] (√𝑥𝑘+1 + √𝑥𝑘
2)
+(2𝜓1𝜙
− 𝑎11)√𝑥𝑘 (√𝑥𝑘+1 + √𝑥𝑘
2)
−𝑎12√𝑦𝑘 (√𝑥𝑘+1 + √𝑥𝑘
2 ),
(4.46a)
𝑦𝑘+1 − 𝑦𝑘
𝜙=
[𝑎21𝑢∗ + (𝑎22 −
2𝜓1𝜙)𝑣∗] (
√𝑦𝑘+1 +√𝑦𝑘
2)
−𝑎21√𝑥𝑘 (√𝑦𝑘+1 +√𝑦𝑘
2)
+(2𝜓1𝜙
− 𝑎22)√𝑦𝑘 (√𝑦𝑘+1 +√𝑦𝑘
2),
(4.46b)
persamaan (4.46) di atas adalah skema beda hingga eksak untuk persamaan (4.1).
B. Simulasi Numeris
Pada bagian ini akan dibahas simulasi numeris dari persamaan diferensial
Lotka-Volterra termodifikasi yang ditunjukkan pada persamaan (4.1) dengan
menggunakan metode beda hingga eksak dan penyelesaian tersebut akan
dibandingkan dengan metode Euler dan metode Heun dengan menggunakan
program MATLAB.
Terlebih dahulu akan dicari penyelesaian untuk persamaan (4.1) dengan
menggunakan metode beda hingga eksak. Skema yang dihasilkan dari metode beda
hingga eksak telah diperoleh pada subbab sebelumnya yang ditunjukkan pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

59
persamaan (4.46). Akan dipilih 𝑟1 = 0,5; 𝑟2 = 0,2; 𝑎11 = 2; 𝑎12 = 3; 𝑎21 =
1; 𝑎22 = 6; Δ𝑡 = 0.1 yang akan mengakibatkan 𝑢∗ = 0.2667; 𝑣∗ = −0.011; 𝜆1 =
−0.6771; 𝜆2 = −3.3229; 𝜓1 = −0.0099; dan 𝜙 = 0.0821.
Nilai-nilai di atas disubstitusikan ke persamaan (4.46) akan diperoleh
𝑥𝑘+1 − 𝑥𝑘 = 0.02332(√𝑥𝑘+1 − √𝑥𝑘) − 0.0920√𝑥𝑘(√𝑥𝑘+1 −√𝑥𝑘)
− 0.1232(√𝑥𝑘+1 −√𝑥𝑘)√𝑦𝑘 , (4.47)
𝑦𝑘+1 − 𝑦𝑘 = 0.0081(√𝑦𝑘+1 −√𝑦𝑘) − 0.0411(√𝑦𝑘+1 −√𝑦𝑘)√𝑥𝑘
− 0.2562√𝑦𝑘(√𝑦𝑘+1 − √𝑦𝑘),
atau
𝑥𝑘+1 − (0.0232 − 0.0920√𝑥𝑘 − 0.1232√𝑦𝑘)√𝑥𝑘+1 − (0.0232√𝑥𝑘 +
(1 − 0.0920)𝑥𝑘 − 0.1232√𝑥𝑘√𝑦𝑘) = 0, (4.48)
𝑦𝑘+1 − (0.0081 − 0.0411√𝑥𝑘 − 0.2562√𝑦𝑘)√𝑦𝑘+1 − (0.0081√𝑦𝑘 −
0.0411√𝑦𝑘√𝑥𝑘 + (1 − 0.2562)𝑦𝑘) = 0.
Misalnya diketahui nilai awalnya adalah 𝑥(0) = 1 dan 𝑦(0) = 1. Akan dihitung
nilai 𝑡 = 0 sampai 𝑡 = 1 dengan Δ𝑡 = 0.1. Jika nilai awalnya disubstitusikan ke
persamaan (4.48) akan diperoleh persamaan sebagai berikut
𝑥1 + 0.1920√𝑥1 − 0.8080 = 0, (4.49)
𝑦1 + 0.2892√𝑦1 − 0.7108 = 0.
Untuk memperoleh nilai 𝑥1 dan 𝑦1 akan digunakan metode untuk mencari akar-akar
dari persamaan (4.49). Setelah diperoleh nilai 𝑥1 dan 𝑦1 akan disubstitusi lagi ke
persamaan (4.48) sehingga akan diperoleh persamaan sebagai berikut
𝑥2 + 0.1387√𝑥2 − 0.5408 = 0, (4.50)
𝑦2 + 0.2072√𝑦2 − 0.3579 = 0,
untuk memperoleh nilai 𝑥2 dan 𝑦2 akan digunakan metode biseksi untuk mencari
akar-akar dari dari persamaan (4.50). Proses ini akan berlanjut sampai dengan
memperoleh nilai 𝑥10 dan 𝑦10. Hasil perhitungan dan grafik penyelesaian metode
beda hingga eksak untuk persamaan (4.48) dapat dilihat pada Tabel 4.1.1 dan
Gambar 4.1.1.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

60
Tabel 4.1.1 Hasil perhitungan dari persamaan (4.48) dengan ∆𝑡 = 0.1
𝒕 𝒙 𝒚
0.1 0.6529 0.5052
0.2 0.4480 0.2536
0.3 0.3236 0.1261
0.4 0.2460 0.0619
0.5 0.1962 0.0299
0.6 0.1633 0.0140
0.7 0.1410 0.0063
0.8 0.1256 0.0027
0.9 0.1146 0.0010
1.0 0.1067 0.0003
Gambar 4.1.1 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝛥𝑡 = 0.1.
Pada Gambar 4.1.1 dapat lihat bahwa grafik penyelesaian menggunakan metode
beda hingga eksak turun dan untuk grafik 𝑦 turun mendekati nol yang menunjukkan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

61
bahwa ketika 𝑡 semakin membesar laju pertumbuhan populasi 𝑦 semakin menurun
karena adanya kompetisi. Jika kita mengambil nilai Δ𝑡 = 0.01 maka akan diperoleh
Gambar 4.1.2.
Gambar 4.1.2 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝛥𝑡 = 0.01.
Pada Gambar 4.1.2 dapat dilihat bahwa grafik dari 𝑥 dan 𝑦 halus dan tidak ada
patahan seperti yang ditunjukkan pada Gambar 4.1.1. Selain itu dilihat pada
Gambar 4.1.3 yang menunjukkan bahwa ketika intervalnya 𝑡 diperbesar menjadi
[0,10] grafik penyelesaian beda hingga eksak untuk persamaan (4.1) semakin
mendaki nol.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

62
Gambar 4.1.3 Grafik penyelesaian metode beda hingga eksak untuk persamaan
(4.1) dengan 𝑡 = 0 sampai 𝑡 = 10, dan 𝛥𝑡 = 0.01.
Selanjutnya akan dicari penyelesaian untuk persamaan (4.1) dengan menggunakan
metode Euler. Penyelesaian untuk persamaan (4.1) dengan menggunakan metode
Euler adalah
𝑥𝑘+1 − 𝑥𝑘Δ𝑡
= 𝑟1√𝑥𝑘 − 𝑎11𝑥𝑘 − 𝑎12√𝑥𝑘√𝑦𝑘 , (4.51)
𝑦𝑘+1 − 𝑦𝑘Δ𝑡
= 𝑟2√𝑦𝑘 − 𝑎21√𝑥𝑘√𝑦𝑘 − 𝑎22𝑦𝑘 ,
atau
𝑥𝑘+1 = Δ𝑡(𝑟1√𝑥𝑘 − 𝑎11𝑥𝑘 − 𝑎12√𝑥𝑘√𝑦𝑘) + 𝑥𝑘 , (4.52)
𝑦𝑘+1 = Δ𝑡(𝑟2√𝑦𝑘 − 𝑎21√𝑥𝑘√𝑦𝑘 − 𝑎22𝑦𝑘) + 𝑦𝑘 .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

63
Persamaan (4.52) akan dihitung menggunakan MATLAB dengan 𝑟1 = 0,5; 𝑟2 =
0,2; 𝑎11 = 2; 𝑎12 = 3; 𝑎21 = 6; 𝑎22 = 1; Δ𝑡 = 0.1 dan 𝑥(0) = 1, 𝑦(0) = 1.
Gambar 4.1.4 Grafik penyelesaian persamaan (4.1) dengan menggunakan metode
Euler dengan 𝛥𝑡 = 0.1.
Pada Gambar 4.1.4 dapat dilihat bahwa grafik 𝑥 dan 𝑦 terlihat serupa dengan
yang ditunjukkan pada Gambar 4.1.1. Dapat dilihat pada Gambar 4.1.4 bahwa
grafik 𝑥 dan grafik 𝑦 juga turun dan dapat dilihat bahwa grafik 𝑦 turun mendekati
nol. Hal ini juga ditunjukkan oleh hasil perhitungan pada Tabel 4.1.2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

64
Tabel 4.1.2 Hasil perhitungan dari persamaan (4.53) dengan ∆𝑡 = 0.1
𝒕 𝒙 𝒚
0.1 0.550000 0.320000
0.2 0.351224 0.097361
0.3 0.255135 0.026693
0.4 0.204606 0.005692
0.5 0.176063 0.000373
0.6 0.159399 −0.00028
0.7 0.147482 −0.00011
0.8 0.135942 −0.00024
0.9 0.126679 −0.00017
1.0 0.118390 −0.00018
Jika kita mengambil Δ𝑡 = 0.01 dan interval 𝑡 diambil dari 𝑡 = 0 sampai 𝑡 = 10
maka akan diperoleh Gambar 4.1.5 dimana grafik 𝑥 dan 𝑦 terlihat lebih halus dan
tidak patah seperti pada Gambar 4.1.4. dan dapat dilihat juga bahwa ketika Δ𝑡nya
semakin kecil grafik penyelesaiannya sudah tidak mencapai negatif.
Gambar 4.1.5 Grafik penyelesaian metode Euler untuk persamaan (4.1) dengan
𝑡 = 0 sampai 𝑡 = 10 dan 𝛥𝑡 = 0.01.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

65
Pada perhitungan di MATLAB menunjukkan bahwa nilai 𝑥 konstan di titik 0.060
sedangkan nilai 𝑦 konstan di titik −0.003. Selain itu jika kita perhatikan pada grafik
penyelesaian yang ditunjukkan pada Gambar 4.1.5 bahwa jumlah populasi 𝑥 dan 𝑦
semakin menurun.
Selanjutnya akan dicari penyelesaian untuk persamaan (4.1) dengan menggunakan
metode Heun. Penyelesain untuk persamaan (4.1) dengan menggunakan metode
Heun adalah
�̃�𝑘+1 = 𝑥𝑘 + Δ𝑡 𝑓(𝑡𝑘, 𝑥𝑘),
(4.53) 𝑥𝑘+1 = 𝑥𝑘 +
Δ𝑡
2[𝑓(𝑡𝑘, 𝑥𝑘) + 𝑓(𝑡𝑘+1, �̃�𝑘+1)],
�̃�𝑘+1 = 𝑦𝑘 + Δ𝑡 𝑓(𝑡𝑘 , 𝑦𝑘),
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2[𝑓(𝑡𝑘, 𝑦𝑘) + 𝑓(𝑡𝑘+1, �̃�𝑘+1)],
atau
𝑥𝑘+1 = 𝑥𝑘 +Δ𝑡
2[(𝑟1√𝑥𝑘 − 𝑎11𝑥𝑘 − 𝑎12√𝑥𝑘√𝑦𝑘) + 𝑥𝑘 + Δ𝑡(𝑟1√�̃�𝑘+1 −
𝑎11�̃�𝑘+1 − 𝑎12√�̃�𝑘+1√𝑦𝑘) ] , (4.54)
𝑦𝑘+1 = 𝑦𝑘 +Δ𝑡
2[(𝑟2√𝑦𝑘 − 𝑎21√𝑥𝑘√𝑦𝑘 − 𝑎22𝑦𝑘) + 𝑦𝑘 +
Δ𝑡(𝑟2√�̃�𝑘+1 − 𝑎21√𝑥𝑘√�̃�𝑘+1 − 𝑎22�̃�𝑘+1)].
Persamaan (4.54) akan dihitung menggunakan MATLAB dengan 𝑟1 = 0,5; 𝑟2 =
0,2; 𝑎11 = 2; 𝑎12 = 3; 𝑎21 = 6; 𝑎22 = 1; Δ𝑡 = 0.1 dan 𝑥(0) = 1, 𝑦(0) = 1.
Gambar 4.1.6 adalah gambar yang menunjukkan grafik penyelesaian untuk 𝑥 dan
𝑦 dengan menggunakan metode Heun.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

66
Gambar 4.1.6 Grafik penyelesaian persamaan (4.1) dengan menggunakan metode
Heun dengan 𝛥𝑡 = 0.1.
Pada Gambar 4.1.6 terlihat bahwa grafik penyelesaian dari metode Heun terlihat
mirip dengan grafik penyelesaian dari metode Euler dimana terlihat bahwa grafik 𝑥
dan rafik 𝑦 turun mendekati nol. Hal ini juga ditunjukkan oleh hasil perhitungan
pada Tabel 4.1.3.
Jika kita mengambil nilai selisih 𝑡 semakin kecil yaitu Δ𝑡 = 0.01 dan interval 𝑡 juga
diperbesar dari 𝑡 = 0 sampi 𝑡 = 10 maka akan diperoleh grafik penyelesaian yang
ditunjukkan pada Gambar 4.1.7.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

67
Tabel 4.1.3. Hasil perhitungan dari persamaan (4.54) dengan ∆𝑡 = 0.1
𝒕 𝒙 𝒚
0.1 0.627298 0.541373
0.2 0.408605 0.292972
0.3 0.277944 0.158457
0.4 0.198315 0.085629
0.5 0.148772 0.046211
0.6 0.117318 0.024886
0.7 0.096978 0.013359
0.8 0.083630 0.007136
0.9 0.074784 0.003784
1.0 0.068901 0.001984
Gambar 4.1.7 Grafik penyelesaian metode Heun untuk persamaan (4.1) dengan
𝑡 = 0 sampai 𝑡 = 10 dan 𝛥𝑡 = 0.01.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

68
Gambar 4.1.6 dan 4.1.7 menunjukkan bahwa ketika jumlah populasi 𝑥 semakin
kecil populasi 𝑦 juga semakin kecil.
C. Pembahasan Hasil Simulasi
Pada subbab ini akan dibahas hasil simulasi dari penyelesaian numerik dari sistem
persamaan diferensial Lotka-Volterra termodifikasi menggunakan metode beda
hingga eksak.
Berdasarkan hasil simulasi pada subbab sebelumnya diperoleh bahwa karena
adanya error numeris, hasil dari metode beda hingga eksak memiliki hasil yang
berbeda dari hasil yang ditunjukkan dari metode Euler dan metode Heun, meskipun
grafik penyelesaian dari ketiga metode tersebut semakin turun menuju nol untuk
grafik 𝑦. Hal ini terlihat dari grafik penyelesaian dari ketiga metode tersebut dimana
grafik penyelesaian dari metode beda hingga eksak tidak pernah mencapai negatif
untuk grafik 𝑥 maupun grafik 𝑦. Grafik dari metode beda hingga eksak ini
menunjukan bahwa ketika jumlah populasi 𝑥 menurun populasi 𝑦 juga ikut
menunurun.
Grafik penyelesaian dari metode Euler dan metode Heun menunjukkan
perilaku yang sama yaitu grafik penyelesaiannya turun menuju nol untuk grafik 𝑦.
Grafik penyelesaian dari kedua metode tersebut menunjukkan ketika jumlah
populasi 𝑥 menurun populasi 𝑦 juga menurun. Dengan demikian, secara umum,
ketiga metode yang disimulasikan memberikan perilaku penyelesaian numeris yang
konsisten.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

69
BAB V
PENUTUP
Pada bab ini akan dibahas kesimpulan dari keseluruhan pembahasan dalam
skripsi ini dan saran yang diberikan kepada pembaca.
A. Kesimpulan
Pada kesimpulan ini penulis akan menjawab dua rumusan masalah yang telah
di buat. Kesimpulan penulis adalah sebagai berikut:
1. Pada pembahasan Bab III penulis telah menguraikan tentang metode beda
hingga eksak dan penulis telah mengkonstruksi skema beda hingga eksak untuk
tiga jenis persamaan diferensial biasa, yaitu persamaan diferensial biasa linear,
persamaan diferensial biasa nonlinear dan sistem persamaan diferensial biasa
nonlinear. Skema yang dikonstruksi dari persamaan diferensial biasa linear dan
nonlinear disimulasikan dengan menggunakan program MATLAB dan
dibandingkan dengan penyelesaian eksaknya dan beberapa metode numeris,
yaitu metode Euler, metode Heun dan metode beda hingga standar. Hasil
simulasi untuk ketiga persamaan diferensial tersebut menunjukkan bahwa
penyelesaian yang dihasilkan menggunakan metode beda hingga eksak lebih
mendekati penyelesaian eksaknya dengan nilai error absolut adalah nol.
2. Dalam Bab IV, persamaan diferensial Lotka-Volterra yang dibahas penulis
dalam skripsi ini adalah untuk kasus kompetisi antara dua populasi yaitu
populasi rusa dan populasi zebra. Penulis telah menguraikan skema beda
hingga eksak untuk persamaan diferensial Lotka-Voltera termodifikasi. Skema
beda hingga eksak ini juga disimulasikan menggunakan MATLAB. Masalah
yang sama juga diselesaikan menggunakan metode Euler dan metode Heun
sebagai pembanding. Hasil dari metode beda hingga eksak menunjukkan grafik
penyelesaian yang mirip dengan yang diberikan oleh metode Euler dan metode
Heun, namun memiliki hasil perhitungannya sedikit berbeda karena adanya
error numeris.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

70
B. Saran
Pada skripsi ini penulis membahas bagaimana mengkonstruksi suatu skema
beda hingga eksak dan bagaimana menyelesaikan persamaan diferensial Lotka-
Volterra termodifikasi menggunakan metode beda hingga eksak. Berdasarkan hasil
kesimpulan di atas penulis menilai bahwa metode beda hingga eksak ini sangat baik
dan akurat untuk menyelesaikan suatu persamaan diferensial. Penulis berharap para
pembaca dapat menggunakan metode lain yang lebih akurat untuk dibandingkan
dengan metode beda hingga eksak dan penulis juga berharap para pembaca dapat
melakukan penelitian yang lebih lanjut tentang metode beda hingga eksak untuk
kasus lainnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

71
DAFTAR PUSTAKA
Bober, W. Tsai, C.-T. and Masory, O. (2009). Numerical and Analytical Methods
with MATLAB. Boca Raton: CRC Press.
Budhi, W. S. (1995). Aljabar linear. Jakarta: Gramedia.
Gupta, R. S. (2015). Elements of Numerical Analysis. New York: Cambridge
University Press.
Gorvett, R. (2014). Predator-Prey Dynamics: A Model for Competition,
Regulation, and Strategic Planning.
https://regulation.pstat.ucsb.edu/sites/ARC/ARC2014/presentation_slides_pdf
/A8-Wed/2-Gorvett%20Jul%2016%202014.pdf [28 Februari 2018 (17:29)]
Haberman, R. (1998). Mathematical Model: Mechanical Vibrations, Population
Dynamics, and Traffic Flow. Philadelphia: SIAM.
Hunter, John K. (2014). An Introduction to Real Analysis.
https://www.math.ucdavis.edu/~hunter/intro_analysis_pdf/ch7.pdf [11 Juli
2019 (14:25)]
Nemytski, V. V and Stepanov, V. V. (1969). Qualitative Theory of Differential
Equations. Princeton: Princeton University Press.
Mathews, J. H. and Fink, K. D. (2004). Numerical Methods Using MATLAB Fourth
Edition. upper: Pearson.
Mickens, R. E. (1994). Nonstandard Finite Difference Models of Differential
Equations. Singapore: World Scientific.
Mickens, R. E. (2015). Difference Equations: Theory, Application, and Advanced
Topics Third Edition. Boca Raton: CRC Press.
Mickens, R. E. (2002). Nonstandard Finite Difference Schemes for Differential
Equations. Journal of Difference Equations and Applications. 8(9): 823-847.
Mickens, R. E. (2018). A Note on Exact Finite Difference Schemes for Modified
Lotka–Volterra Differential Equations. Journal of Difference Equations and
Applications. 24(6): 1016-1022.
Ross, S. L. (1980). Introduction to Ordinary Differential Equations Third Edition.
New York: John Wiley & Sons.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

72
Roeger, L.-I. W. (2008). Dynamically Consistent Discrete Lotka-Volterra
Competition Models Derived from Nonstandard Finite-Difference Schemes.
Discrete and Continuous Dynamical Systems Series B. 9(2): 415–429.
McCann, R. C. (1982). Introduction to Ordinary Differential Equations. New
York: Harcourt Brace Jovanovich.
Saperstone, S. H. (1998). Introduction to Ordinary Differential Equations. Pacific
Grove: Brooks/Cole Publishing Company.
Swokowski, E. W. (1980). Calculus with Analytic Geometry Second Edition.
Boston: Prindle, Weber & Schmidt.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

73
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

73
LAMPIRAN PROGRAM
1. Program Bab III
%% PROGRAM UNTUK GRAFIK 3.4.1 DAN 3.4.2
clc
clear
close all
disp(' Hasil perhitungan')
disp('=================================================
======')
disp(' t Eksak Euler Heun Beda eksak
')
disp('=================================================
======')
delta_t=0.1;
t=0:delta_t:1;
n=length(t);
x(1)=1;%nilai awal
y(1)=1;%nilai awal
z(1)=1;%nilai awal
w(1)=1;%nilai awal
v=0;%t0
fprintf(' %d %f %f %f\n',v,x(1),y(1),z(1));
format long
for k=1:n-1
x(k+1)=exp(-t(k+1));% solusi eksak
y(k+1)=(1-delta_t)*y(k);% metode Euler
sisi=w(k)+delta_t*fungsi(t(k),w(k));
w(k+1)=w(k)+delta_t*((fungsi(t(k),w(k))+fungsi(t(k+1),s
isi))/2); %metode Heun
z(k+1)=exp(-delta_t)*z(k);% metode beda eksak
fprintf(' %d %f %f %f
%f\n',k,x(k+1),y(k+1),w(k+1),z(k+1));
end
plot(t,x,'--b*', t,y,'--go',t,w,'y', t,z,'--r^')
axis([0.486 0.502 0.585 0.615])
legend('Eksak','Euler','Heun','Beda Eksak')
xlabel('t')
ylabel('y(t)')
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

74
%% PROGRAM UNTUK GAMBAR 3.4.3 DAN 3.4.4
clc
clear
close all
disp(' Hasil perhitungan')
disp('============================================')
disp(' t Eksak Standar Beda eksak ')
disp('============================================')
delta_t=0.1;
t=0:delta_t:1;
n=length(t);
x(1)=1;
x(2)=1.0948;
y(1)=1;
y(2)=1.0948;
z(1)=1;
z(2)=1.0948;
v=0;
c=1;
fprintf(' %d %f %f %f\n',v,x(1),y(1),z(1));
fprintf(' %d %f %f %f\n',c,x(2),y(2),z(2));
for k=2:n-1
x(k+1)=cos(t(k+1))+sin(t(k+1));% solusi eksak
y(k+1)=(2-(delta_t)^2)*y(k)-y(k-1);% metode standar
z(k+1)=(2-4*(sin(delta_t/2))^2)*z(k)-z(k-1);%
metode nonstandar
fprintf(' %d %f %f
%f\n',k,x(k+1),y(k+1),z(k+1));
end
plot(t,x,'b--', t,y,'r-', t,z,'g-')
axis([0.59 0.95 1.389 1.415])
legend('Eksak','Beda standar','Beda eksak')
xlabel('t')
ylabel('y')
%% PROGRAM UNTUK GAMBAR 3.4.5 DAN 3.4.6
clc
clear
close all
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

75
disp(' Hasil perhitungan')
disp('=================================================
')
disp(' t Eksak Euler Heun Nonstandar
')
disp('=================================================
')
delta_t=0.1;
t=0:delta_t:1;
n=length(t);
x(1)=1;%nilai awal
y(1)=1;%nilai awal
z(1)=1;%nilai awal
w(1)=1;%nilai awal
v=0;%t0
a=1;%nilai koefisien
b=2;%nilai koefisien
fprintf(' %d %f %f %f\n',v,x(1),y(1),z(1));
format long
for k=1:n
format long
x(k)=(a*x(1))/((a-x(1)*b)*exp(-a*t(k))+b*x(1));%
solusi eksak
end
for k=1:n-1
format long
y(k+1)=y(k)+delta_t*contoh(t(k),y(k));% metode
Euler
sisi=w(k)+delta_t*contoh(t(k),w(k));
w(k+1)=w(k)+(delta_t/2)*(contoh(t(k),w(k)) +
contoh(t(k+1),sisi)); %metode Heun
z(k+1)=(a*z(k))/((a-b*z(k))*exp(-
a*delta_t)+b*z(k));% metode nonstandar
fprintf(' %d %f %f %f
%f\n',k,x(k+1),y(k+1),w(k+1),z(k+1));
end
% plot(t,x,'-b', t,y,'-*g',t,w,'-^k', t,z,'-or')
plot(t,x,'--b*', t,y,'--go',t,w,'y', t,z,'--r^')
%gambar 3.4.5 tanpa axix dengan t=0:0.1:1
%gambar 3.4.6 dengan axis dan t=0:0.1:10
axis([0.35 0.65 0.68 0.76])
legend('Eksak','Euler','Heun','Beda eksak')
xlabel('t')
ylabel('y(t)')
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

76
2. Program Bab IV
%% POGRAM UNTUK MECARI NILAI KOEFISIEN X DAN Y
%nilai konstanta parameter
r1=0.5;
r2=0.2;
a11=2;
a12=3;
a21=1;
a22=6;
%nilai fixed point
U_bin=(a12*r2-a22*r1)/(a12*a21-a11*a22);
V_bin=(a21*r1-a11*r2)/(a21*a12-a22*a11);
% Nilai Lamda
lam1=(-((a11+a22)/2)+(sqrt((((a11+a22)/2)^2)-
4*(((a11*a22)/4)-((a12*a21)/4)))))*(1/2);
lam2=(-((a11+a22)/2)-(sqrt((((a11+a22)/2)^2)-
4*(((a11*a22)/4)-((a12*a21)/4)))))*(1/2);
psi1=((lam1*exp(lam2*delta_t)-
lam2*exp(lam1*delta_t))/(lam1-lam2))-1;
phi=((exp(lam1*delta_t)-exp(lam2*delta_t))/(lam1-
lam2));
%untuk x
kof1x=(phi/2)*((a11-(2*psi1/phi))*U_bin+a12*V_bin);
kof2x=(phi/2)*((2*psi1/phi)-a11);
kof3x=(phi/2)*a12;
%untuk y
kof1y=(phi/2)*((a22-(2*psi1/phi))*V_bin+a21*U_bin);
kof2y=(phi/2)*a21;
kof3y=(phi/2)*((2*psi1/phi)-a22);
%% pROGRAM METODE BISEKSI
function k=biseksi(f,a,b,m) % a,b=batas
% m=iterasi
% f=fungsi
for i=1:m
x=(a+b)/2;
if f(a)*f(x)<0
a=a;
b=x;
else
a=x;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

77
b=b;
end
if b-a<10^-12 %toleransi
break
end
if abs(i-m)<10^-6
f(m)
stop
end
end
k=x;
%% PROGRAM BEDA HINGGA EKSAK UNTUK DELTA_T 0.1
clc
clear
close all
delta_t=0.1;
t=0:delta_t:1;
x=1;
y=1;
n=length(t); % length t
a=-0.01; % batas biseksi
b=1; % batas biseksi
m=100000; % iterasi biseksi
for i=1:n-1
fc=inline('(0.0232-0.0920*sqrt(x)-
0.1232*sqrt(y))','x','y');
C=fc(x(i),y(i));
fd=inline('(0.0232*sqrt(x)+(1-0.0920)*x-
0.1232*sqrt(x)*sqrt(y))','x','y');
D=fd(x(i),y(i));
syms xk1
f=xk1-C*sqrt(xk1)-D;
f=inline(f);
ge=inline('(0.0081-0.0411*sqrt(x)-
0.2562*sqrt(y))','x','y');
E=ge(x(i),y(i));
gf=inline('(0.0081*sqrt(y)-
0.0411*sqrt(y)*sqrt(x)+(1-0.2562)*y)','x','y');
F=gf(x(i),y(i));
syms yk1
g=yk1-E*sqrt(yk1)-F;
g=inline(g);
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

78
x=[x ; biseksi(f,a,b,m)];
y=[y ; biseksi(g,a,b,m)];
t(n)
end
plot(t,x , t,y)
axis([0 1 -0.1 1])
legend('x(Rusa)','y(Zebra)')
xlabel('t')
ylabel('y(t) dan x(t)')
%% PROGRAM BEDA HINGGA EKSAK UNTUK DELTA_T 0.01
x=1;
y=1;
n=length(t); % length t
a=-0.001;%0; % batas biseksi
b=1; % batas biseksi
m=100000; % iterasi biseksi
for i=1:n-1
fc=inline('(0.0025-0.0099*sqrt(x)-
0.0147*sqrt(y))','x','y');
C=fc(x(i),y(i));
fd=inline('(0.0025*sqrt(x)+(1-0.0099)*x-
0.0147*sqrt(x)*sqrt(y))','x','y');
D=fd(x(i),y(i));
syms xk1
f=xk1-C*sqrt(xk1)-D;
f=inline(f);
ge=inline('(9.7899e-04- 0.0049*sqrt(x)-
0.0295*sqrt(y))','x','y');
E=ge(x(i),y(i));
gf=inline('(9.7899e-04*sqrt(y)-
0.0049*sqrt(y)*sqrt(x)+(1-0.0295)*y)','x','y');
F=gf(x(i),y(i));
syms yk1
g=yk1-E*sqrt(yk1)-F;
g=inline(g);
x=[x ; biseksi(f,a,b,m)];
y=[y ; biseksi(g,a,b,m)];
end
plot(t,x , t,y)
legend('x(Rusa)','y(Zebra)')
xlabel('t')
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

79
ylabel('y(t) dan x(t)')
%% PROGRAM METODE HEUN UNTUK BAB IV
clc
clear
close all
disp(' Hasil perhitungan')
disp('=========================')
disp(' t x y ')
disp('==========================')
delta_t=0.01;
t=0:delta_t:10;
delta=delta_t/2;
n=length(t);
x(1)=1;%nilai awal
y(1)=1;%nilai awal
r1=0.5;
r2=0.2;
a11=2;
a12=3;
a21=1;
a22=6;
%fprintf(' %d %f %f\n',x(1),y(1));
format long
for k=1:n-1
sisi=x(k)+delta_t*(r1*sqrt(x(k))-a11*x(k)-
a12*sqrt(x(k))*sqrt(y(k)));
x(k+1)=x(k)+delta*(((r1*sqrt(x(k))-a11*x(k)-
a12*sqrt(x(k))*sqrt(y(k)))+((r1*sqrt(sisi)-a11*sisi-
a12*sqrt(sisi)*sqrt(y(k))))));
sisi2=y(k)+delta_t*(r2*sqrt(y(k))-a22*y(k)-
a21*sqrt(x(k))*sqrt(y(k)));
y(k+1)=y(k)+delta*(((r2*sqrt(y(k))-a22*y(k)-
a21*sqrt(x(k))*sqrt(y(k)))+(r2*sqrt(sisi2)-a22*sisi2-
a21*sqrt(sisi2)*sqrt(x(k)))));
fprintf(' %d %f %f\n',k,x(k+1),y(k+1));
end
plot(t,x, t,y)
legend('x(Rusa)','y(Zebra)')
xlabel('t')
ylabel('y(t) dan x(t)')
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

80
%% PROGRAM METODE EULER UNTUK BAB IV
clc
clear
close all
disp(' Hasil perhitungan')
disp('===========================')
disp(' t x y ')
disp('============================')
delta_t=0.01;
t=0:delta_t:10;
n=length(t);
x(1)=1;%nilai awal
y(1)=1;%nilai awal
r1=0.5;
r2=0.2;
a11=2;
a12=3;
a21=1;
a22=6;
%fprintf(' %d %f %f\n',x(1),y(1));
format long
for k=1:n-1
x(k+1)=delta_t*(r1*sqrt(x(k))-a11*x(k)-
a12*sqrt(x(k))*sqrt(y(k)))+x(k);% euler
y(k+1)=delta_t*(r2*sqrt(y(k))-a22*y(k)-
a21*sqrt(x(k))*sqrt(y(k)))+y(k);% metode Euler
fprintf(' %d %f %f\n',k,x(k+1),y(k+1));
end
plot(t,x, t,y)
legend('x(Rusa)','y(Zebra)')
xlabel('t')
ylabel('y(t) dan x(t)')
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI