pada Unmanned Aerial Vehicle (UAV) ABSTRAK · button/tombol dan LED mempunya arti seperti ......
12
Makalah Seminar Kerja Praktek Teknologi Coded Orthogonal Frequency Division Multiplexing (COFDM) untuk Sistem Telemetri pada Unmanned Aerial Vehicle (UAV) Bambang Hadiwijaya (L2F 009 126) Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro ABSTRAK . Perkembangan teknologi telekomunikasi semakin pesat. Bisa juga dikatakan bahwa dunia telekomunikasi sekarang ini bisa dikatakan sebagai bidang yang mengalami kemajuan paling pesat. Perkembangann teknologi telekomunikasi menuju teknologi digital baik dalam sistem modulasi, signaling maupun dalam sistem transmisinya. COFDM (Coded Orthogonal Frequency Divison Multiplexing) merupakan suatu teknik transmisi yang menggunakan beberapa frekuensi subcarrier yang saling tegak lurus (orthogonal) seta memiliki Guard Interval dan Forward Error Correction (FEC) untuk mengurangi noise dan mengoreksi error.Teknologi COFDM digunakan untuk sistem telemetry pada UAV (Unmanned Aerial Vehicle). Teknologi COFDM tersebut digunakan memodulasikan video dari pemancar yang ada di pesawat ke penerima yang ada di ground supaya menghasilkan gambar yang real time. Kata Kunci : COFDM,sistem Telemetri. Modulasi Video,UAV . 1. PENDAHULUAN 1.1 Latar Belakang Seiring dengan perkembangan teknologi di dunia yang begitu pesat maka banyak perusahaan berbasis riset berusaha mengembangkan atau bahkan menciptakan teknologi baru yang bermanfaat. Salah satunya pada departemen pertahanan dan keamanan berusaha meningkatkan pengawasan daerah perbatasan negara. Pembuatan UAV ( Unmanned Aerial Vehicle ) atau sering disebut juga dengan Pesawat Udara Nir Awak merupakan terobosan terbaru yang sedang dikembangkan piak BPPT ( Badan Pengkaji dan Perkembangan Teknologi) UAV (Unmanned Aerial Vehicle) Unmanned Aerial Vehicle adalah kendaraan udara tanpa awak atau boleh juga di sebut Pesawat Udara Nir Awak (PUNA).PUNA dapat dikendalikan oleh pilotnya dari luar pesawat atau dapat juga dikendalikan oleh program yang sebelumnya ditanam untuk mengarahkan kemana PUNA tersebut harus berjalan (Autonomous).PUNA memiliki parameter performansi yang membuatnya dikatakan canggih. Didalam sistem pesawat nir awak, ada suatu mekanisme yang sangat penting untuk di ketahui, dan secara umum, hal tersebut adalah hal yang memungkinkan terciptanya PUNA, yaitu TCC (Tele Command Control) Tele Command Control : berasal dari tiga suku kata, yaitu tele yang berarti jauh, command yang berrarti perintah dan control yang berarti kendali, jadi bisa disimpulkan bahwa tele command control adalah perintah yang digunakan untuk mengontrol dari jauh salah satu aplikasi dari TCC ini adalah pada sistem Telemetry nya Telemetry merupakan alat komunikasi wireless (gelombang elektromagnetik ) yang merubah gelombang elektromagnetik kedalam bentuk data digital. Prinsip dasar telemetry adalah menangkap parameter dalam frekuensi gelombang elektromagnetik, yang kemudian dirubah kedalam data digital. Setelah itu data ini dapat ditransfer ke media lain, seperti telepon, jaringan komputer atau melalui serat optic. Telemetry juga merupakan tekhnologi yang memungkinkan pengukuran data dalam suatu jarak tertentu. . Transmiter telemetry terdiri dari beberapa perangkat yaitu sebuah encoder merupakan instrument yang membaca sinyal digital atau analog, modulator dan transmitter wireless dengan antena. Salah satu penerapannya adalah dalam modulasi Video menggunakan teknik COFDM (Coded Orthogonal Frequency Division Multiplexing) menggunakan alat DOMO SOLO4 pada pemancar dan penerima. 1.2 Tujuan Kerja Praktek di Badan Pengkajian dan Penerapan Teknologi Departemen Pusat Teknologi Industri Pertahanan dan Keamanan Tangerang : a. Mempelajari secara langsung peralatn yang berhubungan dengan aspek Telekomunikasi b. Mengetahui sistem telemetri dengan teknik COFDM pada UAV 1.3 Pembatasan Masalah Dalam melakukan penyusunan laporan kerja praktek ini, agar pembahasan menjadi terarah, penulis akan membatasi kajian mengenai masalah yang dibahas. Adapun pembahasan yang penulis angkat adalah Hal- hal yang akan dibahas pada laporan ini adalah modulasi Video dengan menggunakan Domo SOLO4
Transcript of pada Unmanned Aerial Vehicle (UAV) ABSTRAK · button/tombol dan LED mempunya arti seperti ......

Makalah Seminar Kerja Praktek
Teknologi Coded Orthogonal Frequency Division Multiplexing (COFDM) untuk Sistem Telemetri
pada Unmanned Aerial Vehicle (UAV)
Bambang Hadiwijaya (L2F 009 126)
Jurusan Teknik Elektro Fakultas Teknik Universitas Diponegoro
ABSTRAK
. Perkembangan teknologi telekomunikasi semakin pesat. Bisa juga dikatakan bahwa dunia telekomunikasi sekarang ini
bisa dikatakan sebagai bidang yang mengalami kemajuan paling pesat. Perkembangann teknologi telekomunikasi menuju
teknologi digital baik dalam sistem modulasi, signaling maupun dalam sistem transmisinya. COFDM (Coded Orthogonal
Frequency Divison Multiplexing) merupakan suatu teknik transmisi yang menggunakan beberapa frekuensi subcarrier yang
saling tegak lurus (orthogonal) seta memiliki Guard Interval dan Forward Error Correction (FEC) untuk mengurangi noise
dan mengoreksi error.Teknologi COFDM digunakan untuk sistem telemetry pada UAV (Unmanned Aerial Vehicle). Teknologi
COFDM tersebut digunakan memodulasikan video dari pemancar yang ada di pesawat ke penerima yang ada di ground
supaya menghasilkan gambar yang real time.
Kata Kunci : COFDM,sistem Telemetri. Modulasi Video,UAV .
1. PENDAHULUAN
1.1 Latar Belakang
Seiring dengan perkembangan teknologi di
dunia yang begitu pesat maka banyak perusahaan
berbasis riset berusaha mengembangkan atau bahkan
menciptakan teknologi baru yang bermanfaat. Salah
satunya pada departemen pertahanan dan keamanan
berusaha meningkatkan pengawasan daerah
perbatasan negara. Pembuatan UAV ( Unmanned
Aerial Vehicle ) atau sering disebut juga dengan
Pesawat Udara Nir Awak merupakan terobosan
terbaru yang sedang dikembangkan piak BPPT (
Badan Pengkaji dan Perkembangan Teknologi)
UAV (Unmanned Aerial Vehicle) Unmanned
Aerial Vehicle adalah kendaraan udara tanpa awak
atau boleh juga di sebut Pesawat Udara Nir Awak
(PUNA).PUNA dapat dikendalikan oleh pilotnya dari
luar pesawat atau dapat juga dikendalikan oleh
program yang sebelumnya ditanam untuk
mengarahkan kemana PUNA tersebut harus berjalan
(Autonomous).PUNA memiliki parameter
performansi yang membuatnya dikatakan canggih.
Didalam sistem pesawat nir awak, ada suatu
mekanisme yang sangat penting untuk di ketahui, dan
secara umum, hal tersebut adalah hal yang
memungkinkan terciptanya PUNA, yaitu TCC (Tele
Command Control) Tele Command Control : berasal
dari tiga suku kata, yaitu tele yang berarti jauh,
command yang berrarti perintah dan control yang
berarti kendali, jadi bisa disimpulkan bahwa tele
command control adalah perintah yang digunakan
untuk mengontrol dari jauh salah satu aplikasi dari
TCC ini adalah pada sistem Telemetry nya
Telemetry merupakan alat komunikasi
wireless (gelombang elektromagnetik ) yang
merubah gelombang elektromagnetik kedalam bentuk
data digital. Prinsip dasar telemetry adalah
menangkap parameter dalam frekuensi gelombang
elektromagnetik, yang kemudian dirubah kedalam
data digital. Setelah itu data ini dapat ditransfer ke
media lain, seperti telepon, jaringan komputer
atau melalui serat optic. Telemetry juga
merupakan tekhnologi yang memungkinkan
pengukuran data dalam suatu jarak tertentu. .
Transmiter telemetry terdiri dari beberapa
perangkat yaitu sebuah encoder merupakan
instrument yang membaca sinyal digital atau
analog, modulator dan transmitter wireless
dengan antena. Salah satu penerapannya
adalah dalam modulasi Video menggunakan
teknik COFDM (Coded Orthogonal Frequency
Division Multiplexing) menggunakan alat
DOMO SOLO4 pada pemancar dan penerima.
1.2 Tujuan
Kerja Praktek di Badan Pengkajian dan
Penerapan Teknologi Departemen Pusat
Teknologi Industri Pertahanan dan Keamanan
Tangerang :
a. Mempelajari secara langsung peralatn
yang berhubungan dengan aspek
Telekomunikasi
b. Mengetahui sistem telemetri dengan
teknik COFDM pada UAV
1.3 Pembatasan Masalah
Dalam melakukan penyusunan laporan
kerja praktek ini, agar pembahasan menjadi
terarah, penulis akan membatasi kajian
mengenai masalah yang dibahas. Adapun
pembahasan yang penulis angkat adalah Hal-
hal yang akan dibahas pada laporan ini adalah
modulasi Video dengan menggunakan Domo
SOLO4
2. DASAR TEORI
2.1 Pesawat Terbang
.
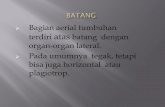
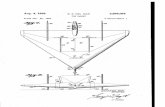
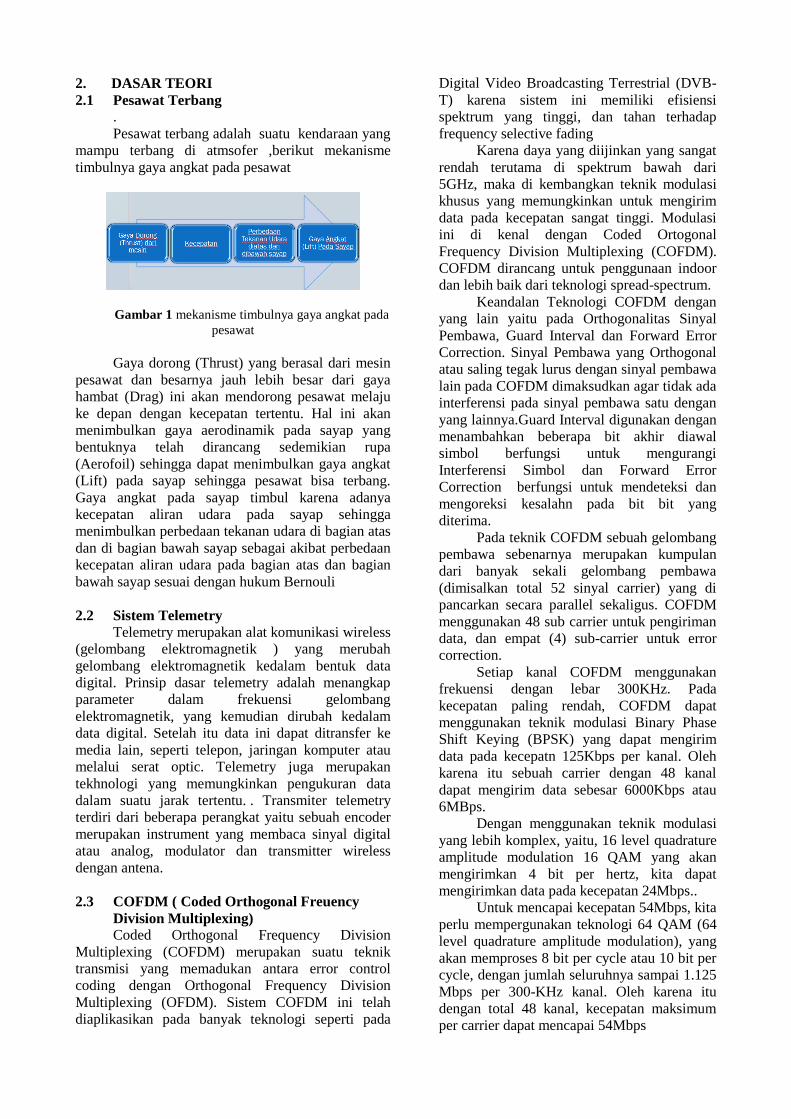
Pesawat terbang adalah suatu kendaraan yang
mampu terbang di atmsofer ,berikut mekanisme
timbulnya gaya angkat pada pesawat
Gambar 1 mekanisme timbulnya gaya angkat pada
pesawat
Gaya dorong (Thrust) yang berasal dari mesin
pesawat dan besarnya jauh lebih besar dari gaya
hambat (Drag) ini akan mendorong pesawat melaju
ke depan dengan kecepatan tertentu. Hal ini akan
menimbulkan gaya aerodinamik pada sayap yang
bentuknya telah dirancang sedemikian rupa
(Aerofoil) sehingga dapat menimbulkan gaya angkat
(Lift) pada sayap sehingga pesawat bisa terbang.
Gaya angkat pada sayap timbul karena adanya
kecepatan aliran udara pada sayap sehingga
menimbulkan perbedaan tekanan udara di bagian atas
dan di bagian bawah sayap sebagai akibat perbedaan
kecepatan aliran udara pada bagian atas dan bagian
bawah sayap sesuai dengan hukum Bernouli
2.2 Sistem Telemetry
Telemetry merupakan alat komunikasi wireless
(gelombang elektromagnetik ) yang merubah
gelombang elektromagnetik kedalam bentuk data
digital. Prinsip dasar telemetry adalah menangkap
parameter dalam frekuensi gelombang
elektromagnetik, yang kemudian dirubah kedalam
data digital. Setelah itu data ini dapat ditransfer ke
media lain, seperti telepon, jaringan komputer atau
melalui serat optic. Telemetry juga merupakan
tekhnologi yang memungkinkan pengukuran data
dalam suatu jarak tertentu. . Transmiter telemetry
terdiri dari beberapa perangkat yaitu sebuah encoder
merupakan instrument yang membaca sinyal digital
atau analog, modulator dan transmitter wireless
dengan antena.
2.3 COFDM ( Coded Orthogonal Freuency
Division Multiplexing)
Coded Orthogonal Frequency Division
Multiplexing (COFDM) merupakan suatu teknik
transmisi yang memadukan antara error control
coding dengan Orthogonal Frequency Division
Multiplexing (OFDM). Sistem COFDM ini telah
diaplikasikan pada banyak teknologi seperti pada
Digital Video Broadcasting Terrestrial (DVB-
T) karena sistem ini memiliki efisiensi
spektrum yang tinggi, dan tahan terhadap
frequency selective fading
Karena daya yang diijinkan yang sangat
rendah terutama di spektrum bawah dari
5GHz, maka di kembangkan teknik modulasi
khusus yang memungkinkan untuk mengirim
data pada kecepatan sangat tinggi. Modulasi
ini di kenal dengan Coded Ortogonal
Frequency Division Multiplexing (COFDM).
COFDM dirancang untuk penggunaan indoor
dan lebih baik dari teknologi spread-spectrum.
Keandalan Teknologi COFDM dengan
yang lain yaitu pada Orthogonalitas Sinyal
Pembawa, Guard Interval dan Forward Error
Correction. Sinyal Pembawa yang Orthogonal
atau saling tegak lurus dengan sinyal pembawa
lain pada COFDM dimaksudkan agar tidak ada
interferensi pada sinyal pembawa satu dengan
yang lainnya.Guard Interval digunakan dengan
menambahkan beberapa bit akhir diawal
simbol berfungsi untuk mengurangi
Interferensi Simbol dan Forward Error
Correction berfungsi untuk mendeteksi dan
mengoreksi kesalahn pada bit bit yang
diterima.
Pada teknik COFDM sebuah gelombang
pembawa sebenarnya merupakan kumpulan
dari banyak sekali gelombang pembawa
(dimisalkan total 52 sinyal carrier) yang di
pancarkan secara parallel sekaligus. COFDM
menggunakan 48 sub carrier untuk pengiriman
data, dan empat (4) sub-carrier untuk error
correction.
Setiap kanal COFDM menggunakan
frekuensi dengan lebar 300KHz. Pada
kecepatan paling rendah, COFDM dapat
menggunakan teknik modulasi Binary Phase
Shift Keying (BPSK) yang dapat mengirim
data pada kecepatn 125Kbps per kanal. Oleh
karena itu sebuah carrier dengan 48 kanal
dapat mengirim data sebesar 6000Kbps atau
6MBps.
Dengan menggunakan teknik modulasi
yang lebih komplex, yaitu, 16 level quadrature
amplitude modulation 16 QAM yang akan
mengirimkan 4 bit per hertz, kita dapat
mengirimkan data pada kecepatan 24Mbps..
Untuk mencapai kecepatan 54Mbps, kita
perlu mempergunakan teknologi 64 QAM (64
level quadrature amplitude modulation), yang
akan memproses 8 bit per cycle atau 10 bit per
cycle, dengan jumlah seluruhnya sampai 1.125
Mbps per 300-KHz kanal. Oleh karena itu
dengan total 48 kanal, kecepatan maksimum
per carrier dapat mencapai 54Mbps
Tentunya dengan semakin banyak bits per
cycle (hertz) yang di encoded, akan semakin besar
kemungkinan terjadinya interferensi, fading, dan
jarak yang mungkin di tempuh semakin pendek
2.4 VIDEO
Video adalah teknologi untuk menangkap,
merekam, memproses, mentransmisikan dan menata
ulang gambar bergerak. Biasanya menggunakan film
seluloid, sinyal elektronik, atau media digital.
Berkaitan dengan “penglihatan dan pendengaran
NTSC (National Television System Committee)
- 525 baris, 60 Hz refresh rate.
- Digunakan di Amerika, Korea, Jepang, dan
Canada.
- Frame rate 30 fps
PAL (Phase Alternating Line)
- 625 baris, 50 Hz refresh rate
- Digunakan di sebagian besar Eropa Barat.
- Frame rate25 fps
SECAM (Séquentiel couleur avec mémoire)
- Digunakan di Perancis, Rusia, dan Eropa
timur
- Berdasarkan frequency modulation dengan
25 Hz refresh rate dan 625 baris.
3. SISTEM TELEMETRI MODULASI VIDEO
PADA UAV MENGGUNAKAN COFDM
PADA DOMO SOLO4
3.1 SistemTtelemetri Modulasi Video pada UAV
menggunakan COFDM pada DOMO SOLO4
Produk Domo SOLO4 dan domo SOLO2
berkemampuan bagi pengguna untuk membangun
sistem video digital tanpa kabel. Produk Domo
SOLO4 dan SOLO2 dirancang untuk menyediakan
hubungan point-to-point untuk kualitas frame rate
video dan audio yang maksimal.
Sistem Domo SOLO4 dan SOLO2 adalah
sistem digital mengggunakan teknik modulasi
COFDM, sangat efektif menghilangkan masalah
yang disebabkan multipath dan pemantulan
3.2 Hal – Hal yang harus diperhatikan 1. Sebelum memulai pastikan pengaturan catu
daya memadai untuk memenuhi kebutuhan
setiap produk SOLO4 atau SOLO2.
2. Mengoperasikan dalam batasan lingkungan
yang spesifik
3. Jangan basah
4. Hanya yang sudah terlatih yang dapat
membuka produknya. Tidak ada cara yang
dibutuhkan pengguna untuk
mendapatkan akses ke interior dari
produk
4.3 Alat Digunakan
4.3.1 Pemancar
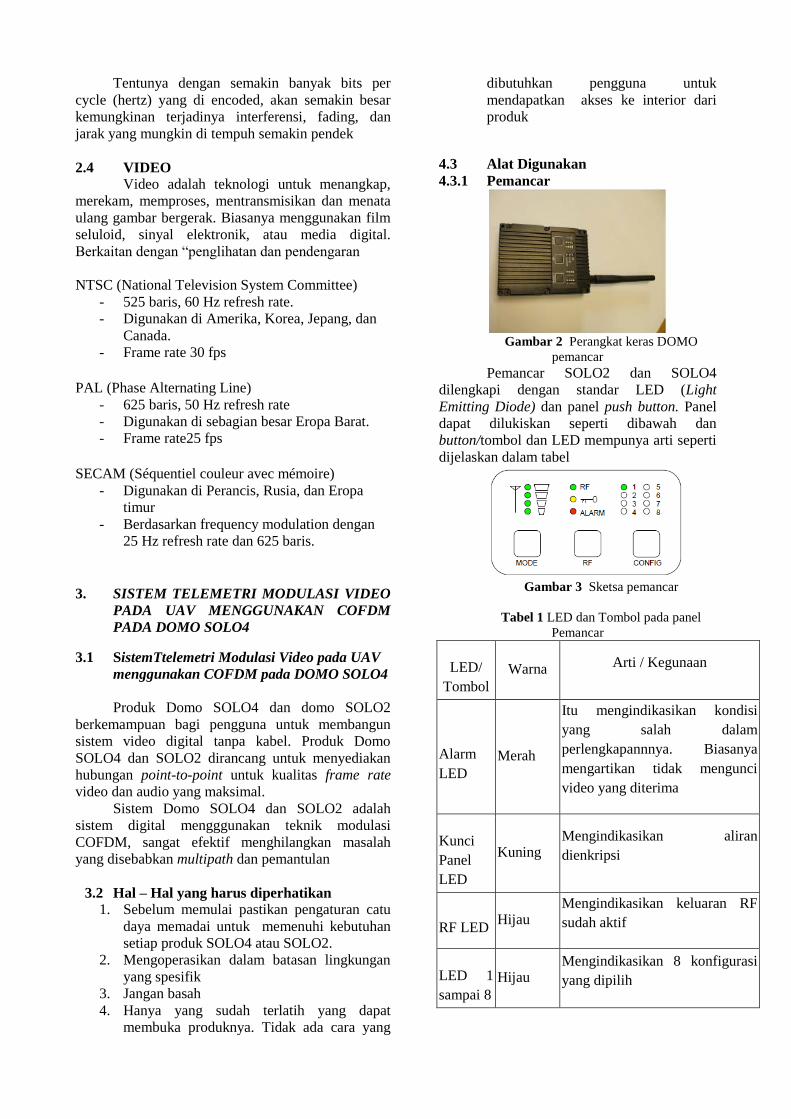
Gambar 2 Perangkat keras DOMO
pemancar
Pemancar SOLO2 dan SOLO4
dilengkapi dengan standar LED (Light
Emitting Diode) dan panel push button. Panel
dapat dilukiskan seperti dibawah dan
button/tombol dan LED mempunya arti seperti
dijelaskan dalam tabel
Gambar 3 Sketsa pemancar
Tabel 1 LED dan Tombol pada panel
Pemancar
LED/
Tombol
Warna Arti / Kegunaan
Alarm
LED
Merah
Itu mengindikasikan kondisi
yang salah dalam
perlengkapannnya. Biasanya
mengartikan tidak mengunci
video yang diterima
Kunci
Panel
LED
Kuning Mengindikasikan aliran
dienkripsi
RF LED Hijau
Mengindikasikan keluaran RF
sudah aktif
LED 1
sampai 8
Hijau Mengindikasikan 8 konfigurasi
yang dipilih
Mode
Jarak
LED
Green
Pemancar SOLO2 : LED tidak
berfungsi
Pemancar SOLO4 :
mengindikasikan mode jarak
1. Ultra Long Range
1,25MHz QPSK FEC
1/3 (optional)
2. Long range 2,5MHz
QPSK FEC 1/3
3. Medium Range 2,5MHz
QPSK FEC 2/3
4. Short Range 2,5MHZ
16QAM FEC2/3
Tombol
RF
-
Pemancar.
Tekan tombol RF makan RF
output menjadi OFF atau ON
Tekan terus untuk mengaktifkan
standby mode
Tombol
Config
-
Tombol Comfig ketika ditekan
akan memilih ke konfigurasi
selanjutnya
Tekan terus sakelar depan
terkunci
Tombol
Mode
-
Pemancar SOLO2 – Tidak
berfungsi
Pemancar SOLO4 – Tuas antara
range mode sebelumnya
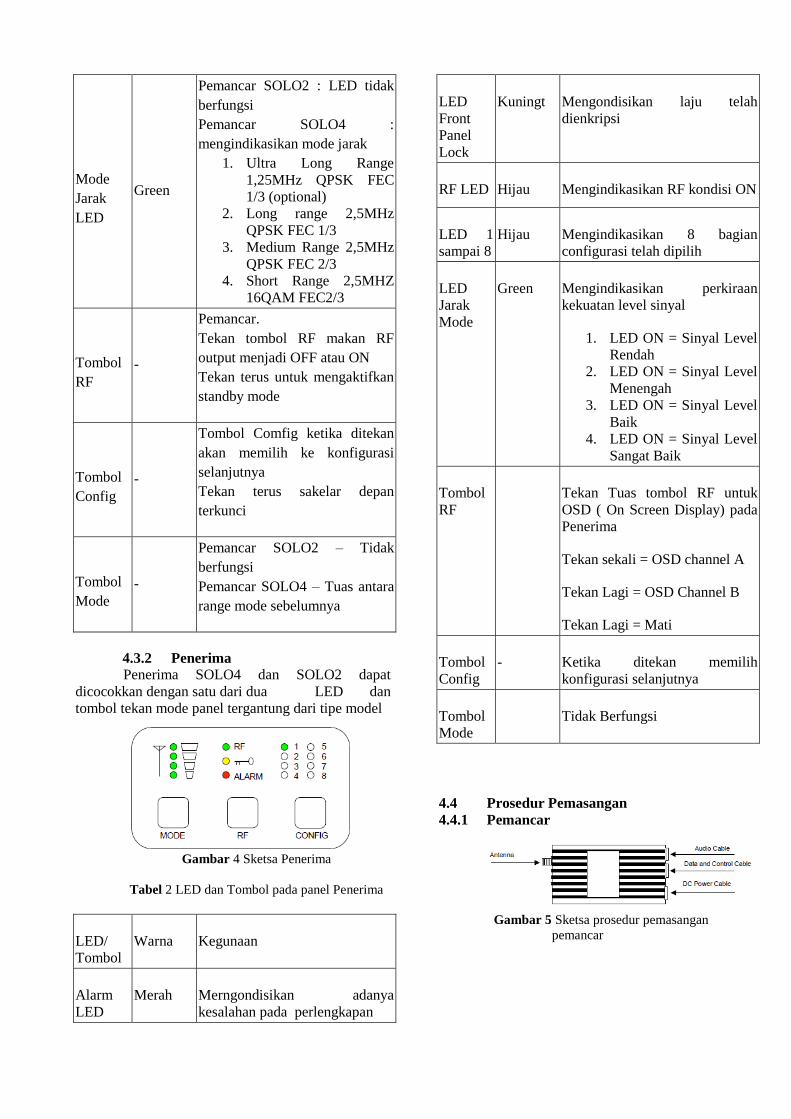
4.3.2 Penerima
Penerima SOLO4 dan SOLO2 dapat
dicocokkan dengan satu dari dua LED dan
tombol tekan mode panel tergantung dari tipe model
Gambar 4 Sketsa Penerima
Tabel 2 LED dan Tombol pada panel Penerima
LED/
Tombol
Warna Kegunaan
Alarm
LED
Merah Merngondisikan adanya
kesalahan pada perlengkapan
LED
Front
Panel
Lock
Kuningt Mengondisikan laju telah
dienkripsi
RF LED Hijau Mengindikasikan RF kondisi ON
LED 1
sampai 8
Hijau Mengindikasikan 8 bagian
configurasi telah dipilih
LED
Jarak
Mode
Green Mengindikasikan perkiraan
kekuatan level sinyal
1. LED ON = Sinyal Level
Rendah
2. LED ON = Sinyal Level
Menengah
3. LED ON = Sinyal Level
Baik
4. LED ON = Sinyal Level
Sangat Baik
Tombol
RF
Tekan Tuas tombol RF untuk
OSD ( On Screen Display) pada
Penerima
Tekan sekali = OSD channel A
Tekan Lagi = OSD Channel B
Tekan Lagi = Mati
Tombol
Config
- Ketika ditekan memilih
konfigurasi selanjutnya
Tombol
Mode
Tidak Berfungsi
4.4 Prosedur Pemasangan
4.4.1 Pemancar
Gambar 5 Sketsa prosedur pemasangan
pemancar
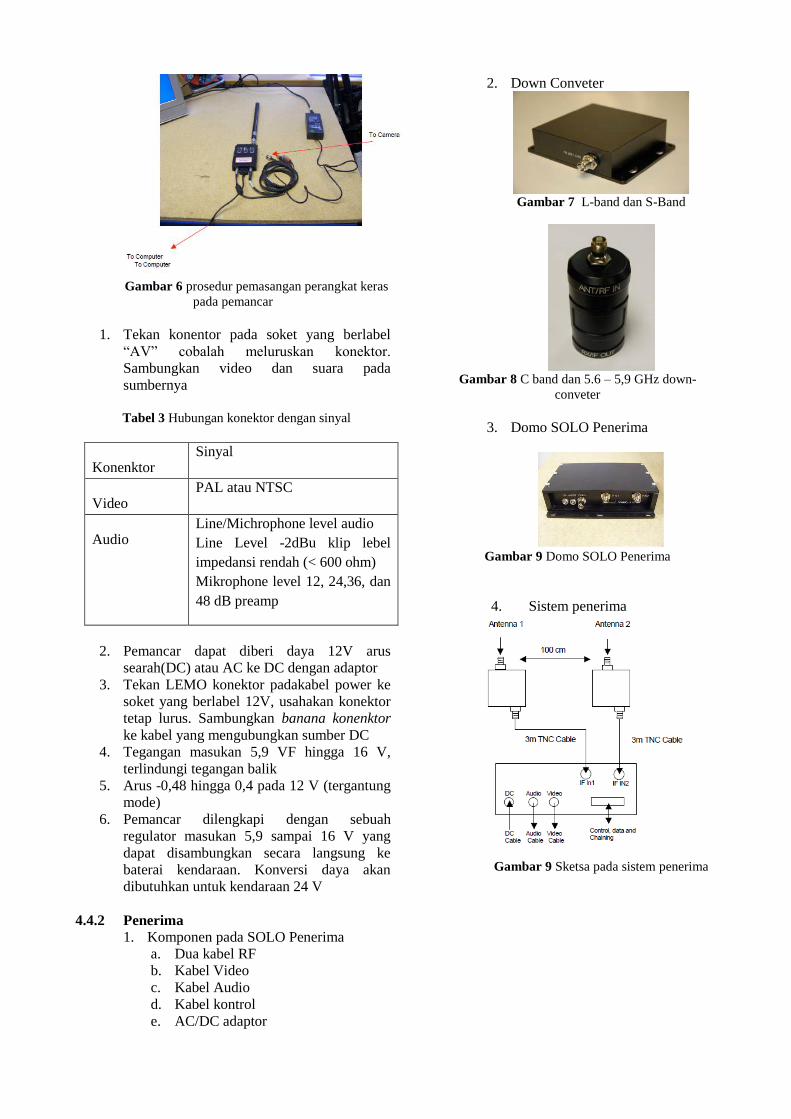
Gambar 6 prosedur pemasangan perangkat keras
pada pemancar
1. Tekan konentor pada soket yang berlabel
“AV” cobalah meluruskan konektor.
Sambungkan video dan suara pada
sumbernya
Tabel 3 Hubungan konektor dengan sinyal
Konenktor Sinyal
Video PAL atau NTSC
Audio Line/Michrophone level audio
Line Level -2dBu klip lebel
impedansi rendah (< 600 ohm)
Mikrophone level 12, 24,36, dan
48 dB preamp
2. Pemancar dapat diberi daya 12V arus
searah(DC) atau AC ke DC dengan adaptor
3. Tekan LEMO konektor padakabel power ke
soket yang berlabel 12V, usahakan konektor
tetap lurus. Sambungkan banana konenktor
ke kabel yang mengubungkan sumber DC
4. Tegangan masukan 5,9 VF hingga 16 V,
terlindungi tegangan balik
5. Arus -0,48 hingga 0,4 pada 12 V (tergantung
mode)
6. Pemancar dilengkapi dengan sebuah
regulator masukan 5,9 sampai 16 V yang
dapat disambungkan secara langsung ke
baterai kendaraan. Konversi daya akan
dibutuhkan untuk kendaraan 24 V
4.4.2 Penerima
1. Komponen pada SOLO Penerima
a. Dua kabel RF
b. Kabel Video
c. Kabel Audio
d. Kabel kontrol
e. AC/DC adaptor
2. Down Conveter
Gambar 7 L-band dan S-Band
Gambar 8 C band dan 5.6 – 5,9 GHz down-
conveter
3. Domo SOLO Penerima
Gambar 9 Domo SOLO Penerima
4. Sistem penerima
Gambar 9 Sketsa pada sistem penerima
Gambar 10 Perangkat keras pada sistem
penerima
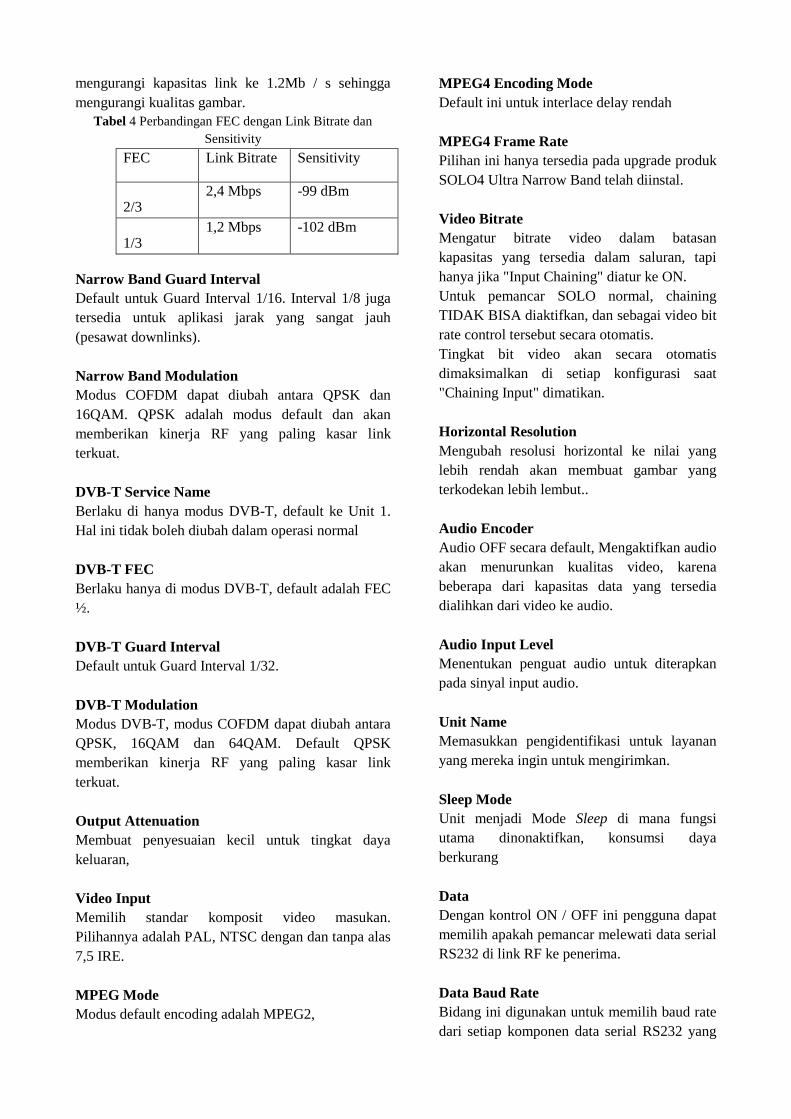
4.4.3 Aplikasi Kontrol Pemancar
Gambar 11 Aplikasi Kontrol Pemancar
Output Frequency (MHz)
Memasukkan frekuensi baru yang diinginkan di
ukuran langkah 250kHz.
Bandwidth Mode
Mode Bandwidth unit baik antara domo (kanal
bandwidth 2.5MHz atau 1.25MHz) Narrowband
/celah sempit atau Bandwidth DVB-T 8MHz.
Audio
Putar 'On' atau 'Off pengaturan dasar dioptimalkan
mengingat bit-rate dipilih mode pemancar.
Default Transmit Mode
Dalam Narrowband atau pita celah sempit pengguna
memiliki mode pre-defined berikut tersedia dari
jendela utama. Perhatikan bahwa Mode Jarak Ultra
Long Ultra Long Range:1.25MHz,QPSK,FEC 1/3
(opsional)
Long Range: 2.5MHz,QPSK,FEC 1/3
Medium Range:2.5MHz,QPSK,FEC 2/3
Pendek Range: 2.5MHz 16QAM FEC 2/3
Dalam DVB-T mode yang tersedia adalah
QPSK,1/2FEC,8MHz, 1/32Guard Interval
QPSK,3/4FEC,8MHz 1/32 Guard Interval
16QAM,1/2FEC,8MHz,1/32Guard Interval
Scrambling/Pengacakan
SOLO4, maka mungkin untuk mengenkripsi
jaringan.
File Option
Load Config - memuat data konfigurasi
tunggal dari file . Save Config - menyimpan
data konfigurasi ke file teks. Load Config Set
- memuat semua 8 konfigurasi dari file Save
Config Set - digunakan untuk menyimpan
semua 8 konfigurasi ke file teks
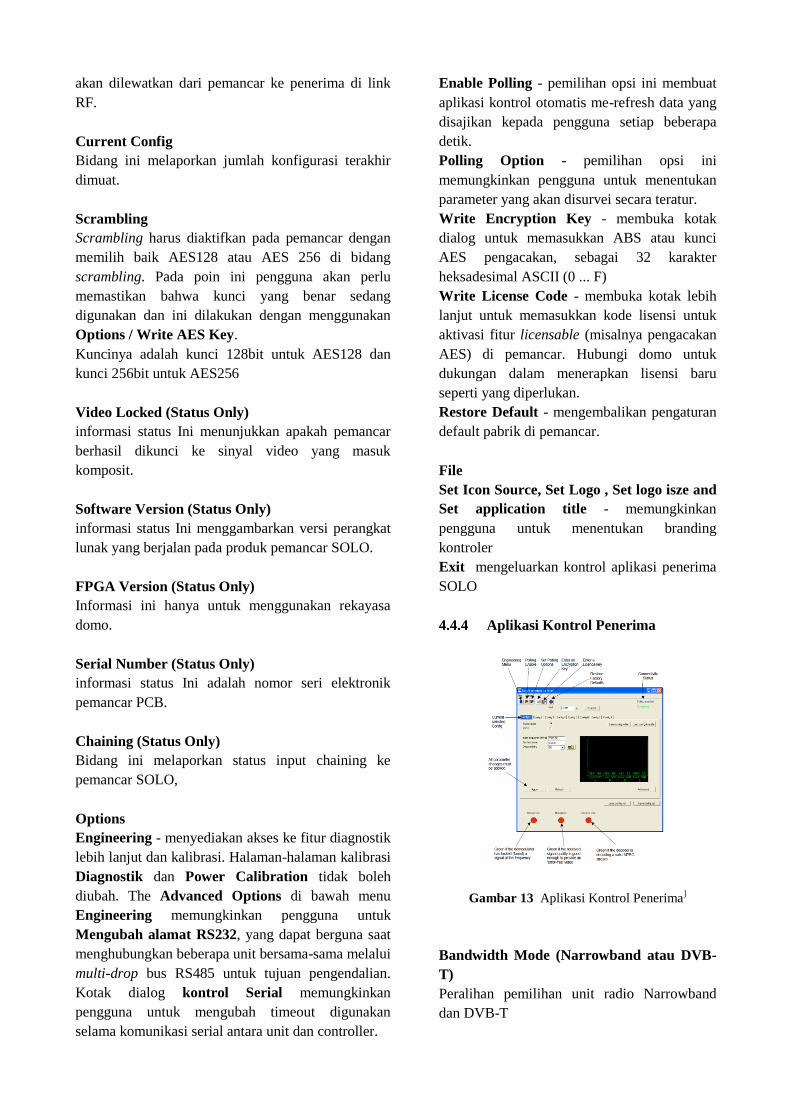
Gambar 12 Jendela Advanced TX Controller
Output Frekuency (MHz)
Memasukkan frekuensi baru kelipatan
250kHz.
Modulation Bandwidth
Modus normal operasi 2.5MHz.
Modulation Output
Kontrol ini digunakan untuk menghidupkan
dan mematikan keluaran RF.
Narrow Band FEC
Default FEC adalah 2/3, Namun peningkatan
rentang pengoperasian dapat dicapai dengan
memilih FEC 1/3. FEC 1/3 akan meningkatkan
jangkauan sinyal oleh 3dB. Namun FEC 1/3
mengurangi kapasitas link ke 1.2Mb / s sehingga
mengurangi kualitas gambar.
Tabel 4 Perbandingan FEC dengan Link Bitrate dan
Sensitivity
FEC Link Bitrate Sensitivity
2/3 2,4 Mbps -99 dBm
1/3 1,2 Mbps -102 dBm
Narrow Band Guard Interval
Default untuk Guard Interval 1/16. Interval 1/8 juga
tersedia untuk aplikasi jarak yang sangat jauh
(pesawat downlinks).
Narrow Band Modulation
Modus COFDM dapat diubah antara QPSK dan
16QAM. QPSK adalah modus default dan akan
memberikan kinerja RF yang paling kasar link
terkuat.
DVB-T Service Name
Berlaku di hanya modus DVB-T, default ke Unit 1.
Hal ini tidak boleh diubah dalam operasi normal
DVB-T FEC
Berlaku hanya di modus DVB-T, default adalah FEC
½.
DVB-T Guard Interval
Default untuk Guard Interval 1/32.
DVB-T Modulation
Modus DVB-T, modus COFDM dapat diubah antara
QPSK, 16QAM dan 64QAM. Default QPSK
memberikan kinerja RF yang paling kasar link
terkuat.
Output Attenuation
Membuat penyesuaian kecil untuk tingkat daya
keluaran,
Video Input
Memilih standar komposit video masukan.
Pilihannya adalah PAL, NTSC dengan dan tanpa alas
7,5 IRE.
MPEG Mode
Modus default encoding adalah MPEG2,
MPEG4 Encoding Mode
Default ini untuk interlace delay rendah
MPEG4 Frame Rate
Pilihan ini hanya tersedia pada upgrade produk
SOLO4 Ultra Narrow Band telah diinstal.
Video Bitrate
Mengatur bitrate video dalam batasan
kapasitas yang tersedia dalam saluran, tapi
hanya jika "Input Chaining" diatur ke ON.
Untuk pemancar SOLO normal, chaining
TIDAK BISA diaktifkan, dan sebagai video bit
rate control tersebut secara otomatis.
Tingkat bit video akan secara otomatis
dimaksimalkan di setiap konfigurasi saat
"Chaining Input" dimatikan.
Horizontal Resolution
Mengubah resolusi horizontal ke nilai yang
lebih rendah akan membuat gambar yang
terkodekan lebih lembut..
Audio Encoder
Audio OFF secara default, Mengaktifkan audio
akan menurunkan kualitas video, karena
beberapa dari kapasitas data yang tersedia
dialihkan dari video ke audio.
Audio Input Level
Menentukan penguat audio untuk diterapkan
pada sinyal input audio.
Unit Name
Memasukkan pengidentifikasi untuk layanan
yang mereka ingin untuk mengirimkan.
Sleep Mode
Unit menjadi Mode Sleep di mana fungsi
utama dinonaktifkan, konsumsi daya
berkurang
Data
Dengan kontrol ON / OFF ini pengguna dapat
memilih apakah pemancar melewati data serial
RS232 di link RF ke penerima.
Data Baud Rate
Bidang ini digunakan untuk memilih baud rate
dari setiap komponen data serial RS232 yang
akan dilewatkan dari pemancar ke penerima di link
RF.
Current Config
Bidang ini melaporkan jumlah konfigurasi terakhir
dimuat.
Scrambling
Scrambling harus diaktifkan pada pemancar dengan
memilih baik AES128 atau AES 256 di bidang
scrambling. Pada poin ini pengguna akan perlu
memastikan bahwa kunci yang benar sedang
digunakan dan ini dilakukan dengan menggunakan
Options / Write AES Key.
Kuncinya adalah kunci 128bit untuk AES128 dan
kunci 256bit untuk AES256
Video Locked (Status Only)
informasi status Ini menunjukkan apakah pemancar
berhasil dikunci ke sinyal video yang masuk
komposit.
Software Version (Status Only)
informasi status Ini menggambarkan versi perangkat
lunak yang berjalan pada produk pemancar SOLO.
FPGA Version (Status Only)
Informasi ini hanya untuk menggunakan rekayasa
domo.
Serial Number (Status Only)
informasi status Ini adalah nomor seri elektronik
pemancar PCB.
Chaining (Status Only)
Bidang ini melaporkan status input chaining ke
pemancar SOLO,
Options
Engineering - menyediakan akses ke fitur diagnostik
lebih lanjut dan kalibrasi. Halaman-halaman kalibrasi
Diagnostik dan Power Calibration tidak boleh
diubah. The Advanced Options di bawah menu
Engineering memungkinkan pengguna untuk
Mengubah alamat RS232, yang dapat berguna saat
menghubungkan beberapa unit bersama-sama melalui
multi-drop bus RS485 untuk tujuan pengendalian.
Kotak dialog kontrol Serial memungkinkan
pengguna untuk mengubah timeout digunakan
selama komunikasi serial antara unit dan controller.
Enable Polling - pemilihan opsi ini membuat
aplikasi kontrol otomatis me-refresh data yang
disajikan kepada pengguna setiap beberapa
detik.
Polling Option - pemilihan opsi ini
memungkinkan pengguna untuk menentukan
parameter yang akan disurvei secara teratur.
Write Encryption Key - membuka kotak
dialog untuk memasukkan ABS atau kunci
AES pengacakan, sebagai 32 karakter
heksadesimal ASCII (0 ... F)
Write License Code - membuka kotak lebih
lanjut untuk memasukkan kode lisensi untuk
aktivasi fitur licensable (misalnya pengacakan
AES) di pemancar. Hubungi domo untuk
dukungan dalam menerapkan lisensi baru
seperti yang diperlukan.
Restore Default - mengembalikan pengaturan
default pabrik di pemancar.
File
Set Icon Source, Set Logo , Set logo isze and
Set application title - memungkinkan
pengguna untuk menentukan branding
kontroler
Exit mengeluarkan kontrol aplikasi penerima
SOLO
4.4.4 Aplikasi Kontrol Penerima
Gambar 13 Aplikasi Kontrol Penerima]
Bandwidth Mode (Narrowband atau DVB-
T)
Peralihan pemilihan unit radio Narrowband
dan DVB-T
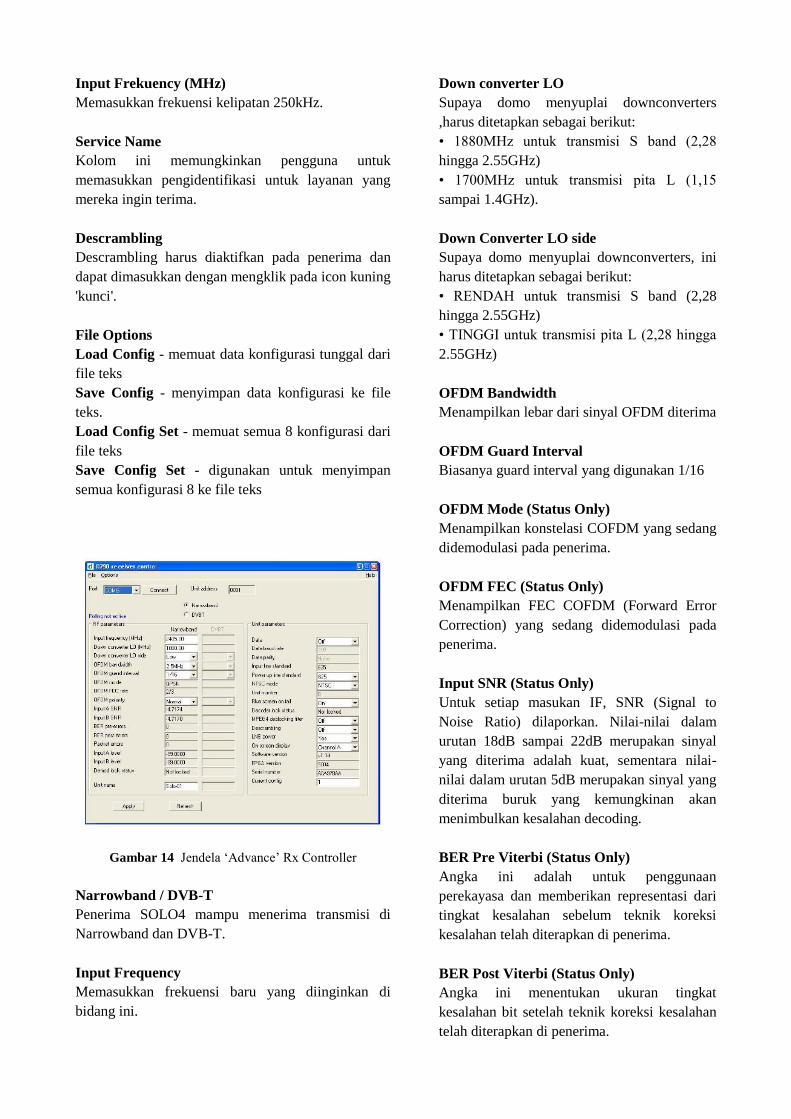
Input Frekuency (MHz)
Memasukkan frekuensi kelipatan 250kHz.
Service Name
Kolom ini memungkinkan pengguna untuk
memasukkan pengidentifikasi untuk layanan yang
mereka ingin terima.
Descrambling
Descrambling harus diaktifkan pada penerima dan
dapat dimasukkan dengan mengklik pada icon kuning
'kunci'.
File Options
Load Config - memuat data konfigurasi tunggal dari
file teks
Save Config - menyimpan data konfigurasi ke file
teks.
Load Config Set - memuat semua 8 konfigurasi dari
file teks
Save Config Set - digunakan untuk menyimpan
semua konfigurasi 8 ke file teks
Gambar 14 Jendela ‘Advance’ Rx Controller
Narrowband / DVB-T
Penerima SOLO4 mampu menerima transmisi di
Narrowband dan DVB-T.
Input Frequency
Memasukkan frekuensi baru yang diinginkan di
bidang ini.
Down converter LO
Supaya domo menyuplai downconverters
,harus ditetapkan sebagai berikut:
• 1880MHz untuk transmisi S band (2,28
hingga 2.55GHz)
• 1700MHz untuk transmisi pita L (1,15
sampai 1.4GHz).
Down Converter LO side
Supaya domo menyuplai downconverters, ini
harus ditetapkan sebagai berikut:
• RENDAH untuk transmisi S band (2,28
hingga 2.55GHz)
• TINGGI untuk transmisi pita L (2,28 hingga
2.55GHz)
OFDM Bandwidth
Menampilkan lebar dari sinyal OFDM diterima
OFDM Guard Interval
Biasanya guard interval yang digunakan 1/16
OFDM Mode (Status Only)
Menampilkan konstelasi COFDM yang sedang
didemodulasi pada penerima.
OFDM FEC (Status Only)
Menampilkan FEC COFDM (Forward Error
Correction) yang sedang didemodulasi pada
penerima.
Input SNR (Status Only)
Untuk setiap masukan IF, SNR (Signal to
Noise Ratio) dilaporkan. Nilai-nilai dalam
urutan 18dB sampai 22dB merupakan sinyal
yang diterima adalah kuat, sementara nilai-
nilai dalam urutan 5dB merupakan sinyal yang
diterima buruk yang kemungkinan akan
menimbulkan kesalahan decoding.
BER Pre Viterbi (Status Only)
Angka ini adalah untuk penggunaan
perekayasa dan memberikan representasi dari
tingkat kesalahan sebelum teknik koreksi
kesalahan telah diterapkan di penerima.
BER Post Viterbi (Status Only)
Angka ini menentukan ukuran tingkat
kesalahan bit setelah teknik koreksi kesalahan
telah diterapkan di penerima.
Input Level (Status Only)
Angka ini menunjukkan tingkat sinyal yang diterima
pada dua input penerima. Operasi normal akan
terjwujud ketika tingkat input -15 dan - 90 dBm.
Demod Lock Status (Status Only)
Hal ini menunjukkan apakah demodulasi yang
berhasil dikunci untuk sinyal RF.
Data
Dengan mengontrol ON / OFF ini pengguna dapat
memilih apakah penerima mengekstrak komponen
data yang mungkin dalam aliran yang dipancarkann.
Data Baud Rate (Status Only)
Melaporkan baud rate dari setiap komponen data
serial RS232 yang hadir dan dipilih dalam aliran.
Input Line Standard (Status Only)
Bidang ini melaporkan batas standar yang saat ini
sedang, atau terakhir diterjemahkan.
Power Up Line Standard
Memilih standar batas video penerima yang akan
dihasilkan (PAL / NTSC) ketika penerima pertama
kali dinyalakan dan sebelum itu telah terkunci ke
sinyal RF yang masuk.
Mode NTSC
Dengan kontrol ini, ketika berjalan di baris mode
525, pengguna dapat memilih apakah output video
NTSC komposit memiliki alas 7,5 IRE diterapkan.
Blue Screen on Fail
Ketika link gagal, pengguna dapat memilih antara
bidang biru video output (YES), dan frame beku
(NO) dengan pilihan ini.
Unit Name
Memasukkan pengidentifikasi untuk layanan
Descrambling
Descrambling juga harus diaktifkan pada penerima
dengan memilih AES128 atau AES256 di bidang
descrambling. Pada titik ini pengguna akan perlu
memastikan bahwa kunci yang benar sedang
digunakan pada penerima dan ini dilakukan dengan
memilih Options / Write AES Key di kontroler
penerima.
Kuncinya adalah nilai 128bit untuk AES128
dan nilai 256bit untuk AES256, dan
dimasukkan sebagai 32 atau 64 karakter
heksadesimal ASCII (0 ... F).
Decoder Lock Status (Status Only)
Melaporkan apakah decoder video berhasil
dikunci dengan aliran bit digital masuk.
Current Config
Memungkinkan pengguna untuk memilih
mana dari 8 konfigurasi memori penerima
beroperasi
Serial Number (Status Only)
status informasi Ini adalah nomor seri
elektronik pemancar PCB.
FPGA Version (Status Only)
Informasi ini adalah hanya menggunakan
untuk rekayasa domo.
Chaining
Chaining memungkinkan beberapa layanan
yang akan dikirim melalui satu link RF.
Sebuah penerima dapat dihubungkan ke
pemancar untuk membentuk chaining atau link
relay. Untuk memungkinkan hal ini, interface
chaining yang disediakan di penerima pertama
harus terhubung ke pemancar kedua. Tiga
mode operasi yang didukung - tidak ada
chaining (default), modus chaining, dan modus
estafet. Modus chaining memungkinkan dua
layanan (remote dan lokal) untuk digabungkan.
Modus estafet memungkinkan hanya layanan
remote untuk ditransmisikan mematikan
layanan lokal.
Options
Enginnering - menyediakan akses ke fitur
diagnostik lebih lanjut dan kalibrasi. Kotak
dialog Diagnostik tidak boleh diubah. kotak
dialog Advanced Options di bawah menu
Engineering memungkinkan pengguna untuk
Mengubah alamat RS232, yang dapat
berguna saat menghubungkan beberapa unit
bersama-sama melalui bus RS485 multi-drop
bertujuan untuk pengendalian. Kotak dialog
Serial control memungkinkan pengguna untuk
mengubah timeout yang digunakan selama
komunikasi serial antara unit dan kontroler.
Enable Polling - memilih opsi ini membuat aplikasi
kontrol otomatis me-refresh data yang disajikan
kepada pengguna setiap beberapa detik.
Polling Options - memilih opsi ini memungkinkan
pengguna untuk menentukan parameter yang akan
disurvei secara teratur.
Write Decryption Key - membuka kotak dialog
untuk memasukkan ABS atau kunci AES berebut,
sebagai 32 karakter heksadesimal ASCII (0 ... F)
Write License Code - membuka kotak lebih lanjut
untuk memasukkan kode lisensi untuk aktivasi fitur
licensable (misalnya AES pengacakan) di pemancar.
Hubungi domo untuk dukungan dalam menerapkan
lisensi baru seperti yang diperlukan.
Restore Defaults - mengembalikan pengaturan
default pabrik di pemancar.
File
Set Icon Source, Set logo source, Set logo size dan
Set application title - memungkinkan pengguna
untuk menentukan branding kontroler
Exit - keluar aplikasi kontrol penerima SOLO
4.5 Hasil uji
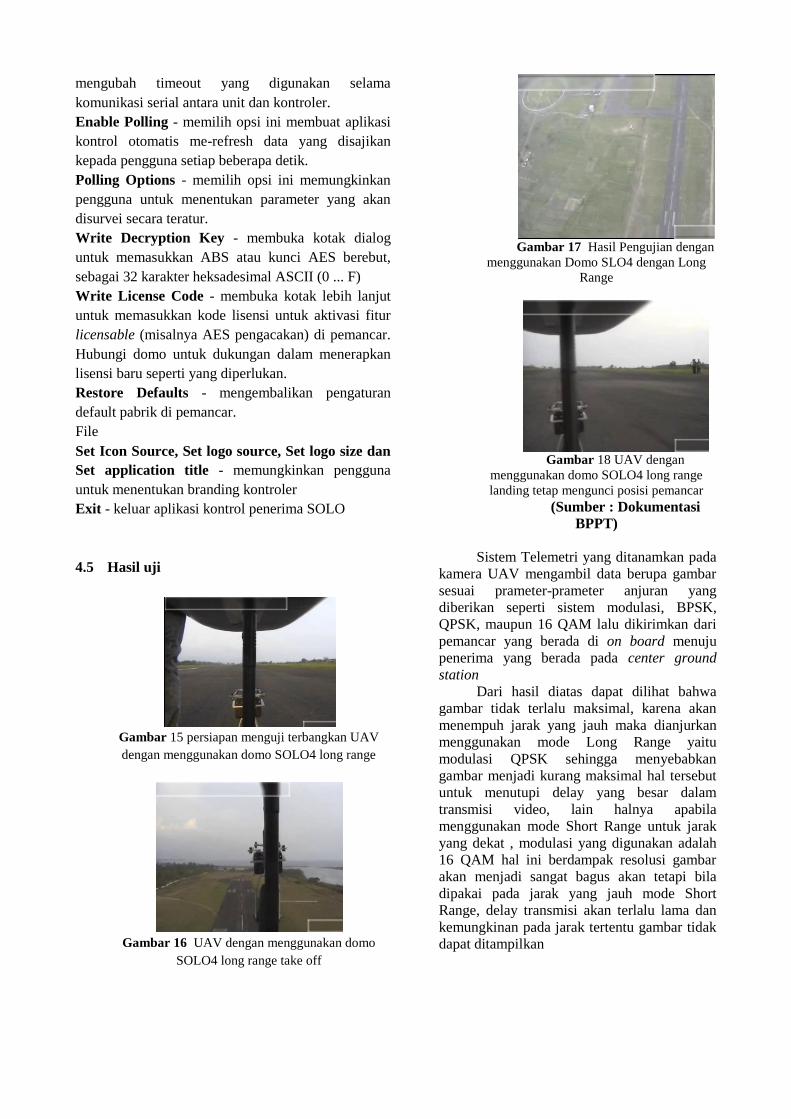
Gambar 15 persiapan menguji terbangkan UAV
dengan menggunakan domo SOLO4 long range
Gambar 16 UAV dengan menggunakan domo
SOLO4 long range take off
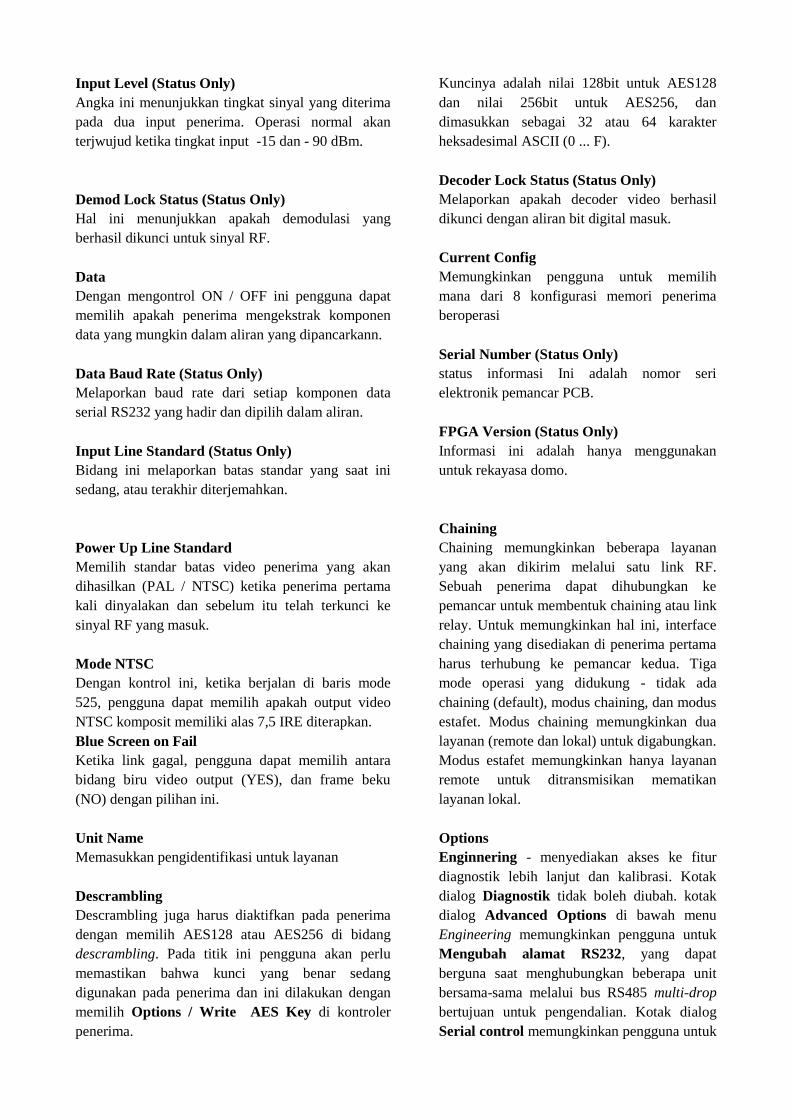
Gambar 17 Hasil Pengujian dengan
menggunakan Domo SLO4 dengan Long
Range
Gambar 18 UAV dengan
menggunakan domo SOLO4 long range
landing tetap mengunci posisi pemancar
(Sumber : Dokumentasi
BPPT)
Sistem Telemetri yang ditanamkan pada
kamera UAV mengambil data berupa gambar
sesuai prameter-prameter anjuran yang
diberikan seperti sistem modulasi, BPSK,
QPSK, maupun 16 QAM lalu dikirimkan dari
pemancar yang berada di on board menuju
penerima yang berada pada center ground
station
Dari hasil diatas dapat dilihat bahwa
gambar tidak terlalu maksimal, karena akan
menempuh jarak yang jauh maka dianjurkan
menggunakan mode Long Range yaitu
modulasi QPSK sehingga menyebabkan
gambar menjadi kurang maksimal hal tersebut
untuk menutupi delay yang besar dalam
transmisi video, lain halnya apabila
menggunakan mode Short Range untuk jarak
yang dekat , modulasi yang digunakan adalah
16 QAM hal ini berdampak resolusi gambar
akan menjadi sangat bagus akan tetapi bila
dipakai pada jarak yang jauh mode Short
Range, delay transmisi akan terlalu lama dan
kemungkinan pada jarak tertentu gambar tidak
dapat ditampilkan
4. KESIMPULAN
Dari uraian di atas dapat ditarik beberapa
kesimpulan sebagai berikut :
1. PUNA dapat dikendalikan oleh pilotnya dari
luar pesawat atau dapat juga dikendalikan
oleh program yang sebelumnya ditanam
untuk mengarahkan kemana PUNA tersebut
harus berjalan (Autonomous)
2. Pada Sistem Telemetri Video, transmisinya
engunakan metode simpleks , yaitu
mengirimkan informasi berupa video dari sisi
pemancar di on board pada pesawat ke
penerima di GCS
3. Domo SOLO4 merupakan sebuah perangkat
dalam mengirimkan video karena sudah
memakai sistem COFDM
4. Galat Domo SOLO4 biasanya terjadi karena
kurang telitinya pengguna dalam
pemasangan
.
DAFTAR PUSTAKA
[1]. http://www.bppt.go.id/, diakses pada tanggal
20 Juli 2012
[2]. http://www.ilmuterbang.com, diakses pada
tanggal 20 Juli 2012
[3]. http://www.wikipidea.com , diakses pada
tanggal 20 Juli 2012
[4]. (Rath, Manaswini, dkk. “Avionic
Framework”. 2006. Honeywell International
Inc : Morristown
[5]. MajalahAngkasa edisi koleksi UAV
[6]. "Telemetry: Summary of concept and
rationale". NASA Technical Reports Server.
Diakses pada tanggal 26 September 2011..
[7]. Telemetry West. Telemetry Tutorial. Sand
Diego: L-3 Communication
[8]. _____,Domo Product .SOLO2 and SOLO4
Users’ Manual. England : COBHAM.2008
[9]. Stott,J.H, Tutorial – COFDM “The how and
why COFDM”. EBU Technical Review
,1998.
[10]. Fahilah, Wike Septi ,Pengaruh
Modulasi M-PSK pada Unjuk Kerja Sistem
Orthogonal Frequency Division
Multiplexing ( OFDM), Makalah Tugas
Akhir Teknik Elektro Undip, 2008.
[11]. Wulandari, Putri, Desain Antena
Vertical Ground Plane pada Frekuensi 902 –
928 MHz dengan menggunakan CST,
Laporan Kerja Praktek Teknik Elektro
Al Azhar,2010.
[12]. _______,MULTIMEDIA,Fak
ultas Teknik Informatika Universitas
Kristen Duta Wacana,2005/2006
BIODATA
Bambang Hadiwijaya
(L2F009126). Lahir di
Medan, 9 September 1991.
Menempuh pendidikan di
SDN 101767 Tembung,
SMPN 2 Bogor, SMAN 3
Bogor dan sekarang tercatat
sebagai Mahasiswa Teknik
Elektro UNDIP angkatan 2009, Konsentrasi
Telekomunikasi
..
Menyetujui
Dosen Pembimbing
Sukiswo, ST,MT
NIP.195806171987031002