Optimasi Jaringan CDMA
23
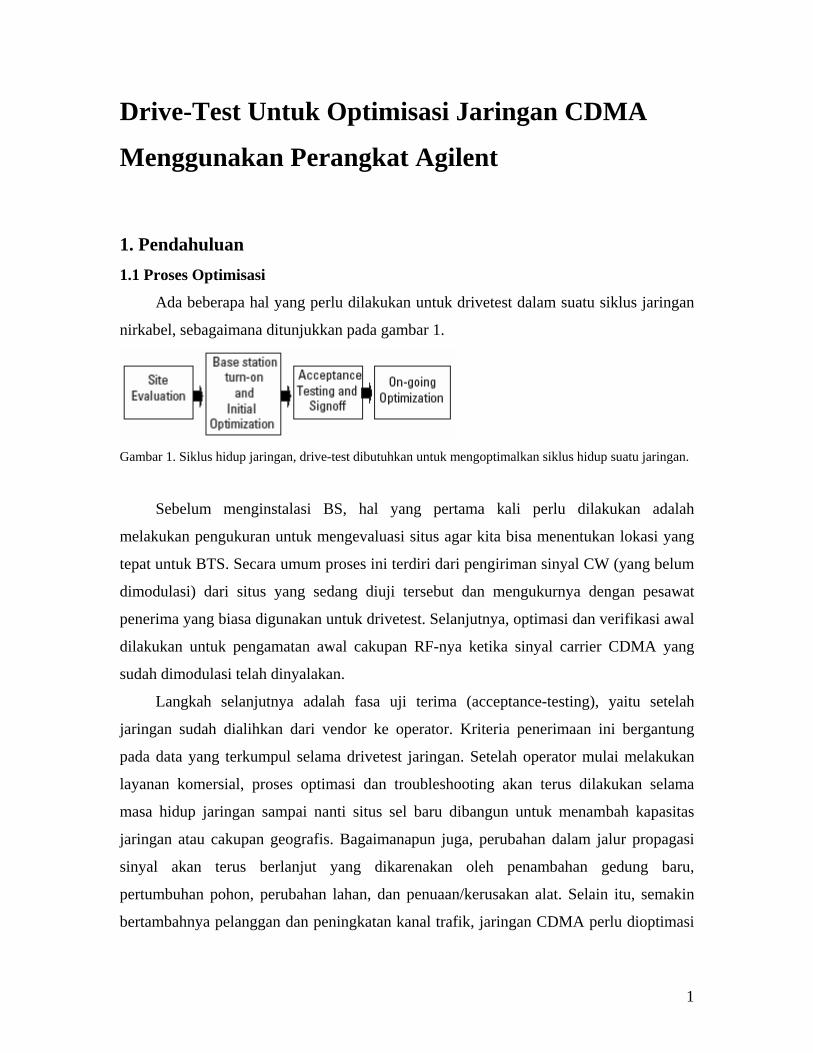
1 Drive-Test Untuk Optimisasi Jaringan CDMA Menggunakan Perangkat Agilent 1. Pendahuluan 1.1 Proses Optimisasi Ada beberapa hal yang perlu dilakukan untuk drivetest dalam suatu siklus jaringan nirkabel, sebagaimana ditunjukkan pada gambar 1. Gambar 1. Siklus hidup jaringan, drive-test dibutuhkan untuk mengoptimalkan siklus hidup suatu jaringan. Sebelum menginstalasi BS, hal yang pertama kali perlu dilakukan adalah melakukan pengukuran untuk mengevaluasi situs agar kita bisa menentukan lokasi yang tepat untuk BTS. Secara umum proses ini terdiri dari pengiriman sinyal CW (yang belum dimodulasi) dari situs yang sedang diuji tersebut dan mengukurnya dengan pesawat penerima yang biasa digunakan untuk drivetest. Selanjutnya, optimasi dan verifikasi awal dilakukan untuk pengamatan awal cakupan RF-nya ketika sinyal carrier CDMA yang sudah dimodulasi telah dinyalakan. Langkah selanjutnya adalah fasa uji terima (acceptance-testing), yaitu setelah jaringan sudah dialihkan dari vendor ke operator. Kriteria penerimaan ini bergantung pada data yang terkumpul selama drivetest jaringan. Setelah operator mulai melakukan layanan komersial, proses optimasi dan troubleshooting akan terus dilakukan selama masa hidup jaringan sampai nanti situs sel baru dibangun untuk menambah kapasitas jaringan atau cakupan geografis. Bagaimanapun juga, perubahan dalam jalur propagasi sinyal akan terus berlanjut yang dikarenakan oleh penambahan gedung baru, pertumbuhan pohon, perubahan lahan, dan penuaan/kerusakan alat. Selain itu, semakin bertambahnya pelanggan dan peningkatan kanal trafik, jaringan CDMA perlu dioptimasi
-
Upload
bayubisworo -
Category
Documents
-
view
57 -
download
1
Transcript of Optimasi Jaringan CDMA
1
Drive-Test Untuk Optimisasi Jaringan CDMA
Menggunakan Perangkat Agilent
1. Pendahuluan 1.1 Proses Optimisasi
Ada beberapa hal yang perlu dilakukan untuk drivetest dalam suatu siklus jaringan
nirkabel, sebagaimana ditunjukkan pada gambar 1.
Gambar 1. Siklus hidup jaringan, drive-test dibutuhkan untuk mengoptimalkan siklus hidup suatu jaringan.
Sebelum menginstalasi BS, hal yang pertama kali perlu dilakukan adalah
melakukan pengukuran untuk mengevaluasi situs agar kita bisa menentukan lokasi yang
tepat untuk BTS. Secara umum proses ini terdiri dari pengiriman sinyal CW (yang belum
dimodulasi) dari situs yang sedang diuji tersebut dan mengukurnya dengan pesawat
penerima yang biasa digunakan untuk drivetest. Selanjutnya, optimasi dan verifikasi awal
dilakukan untuk pengamatan awal cakupan RF-nya ketika sinyal carrier CDMA yang
sudah dimodulasi telah dinyalakan.
Langkah selanjutnya adalah fasa uji terima (acceptance-testing), yaitu setelah
jaringan sudah dialihkan dari vendor ke operator. Kriteria penerimaan ini bergantung
pada data yang terkumpul selama drivetest jaringan. Setelah operator mulai melakukan
layanan komersial, proses optimasi dan troubleshooting akan terus dilakukan selama
masa hidup jaringan sampai nanti situs sel baru dibangun untuk menambah kapasitas
jaringan atau cakupan geografis. Bagaimanapun juga, perubahan dalam jalur propagasi
sinyal akan terus berlanjut yang dikarenakan oleh penambahan gedung baru,
pertumbuhan pohon, perubahan lahan, dan penuaan/kerusakan alat. Selain itu, semakin
bertambahnya pelanggan dan peningkatan kanal trafik, jaringan CDMA perlu dioptimasi
2
ulang untuk menghitung peningkatan daya interferensi yang disebabkan peningkatan
trafik. Selain itu, cell breathing yang disebabkan oleh penggunan trafik yang bervariasi
sepanjang hari memerlukan optimasi jaringan yang berjalan untuk meyakinkan bahwa
kapasitas kanal masih cukup. Drivetest merupakan cara yang tepat untuk membantu
operator dengan mengukur cakupan RF dan interferensi yang mempengaruhi keseluruhan
kapasitas jaringan.
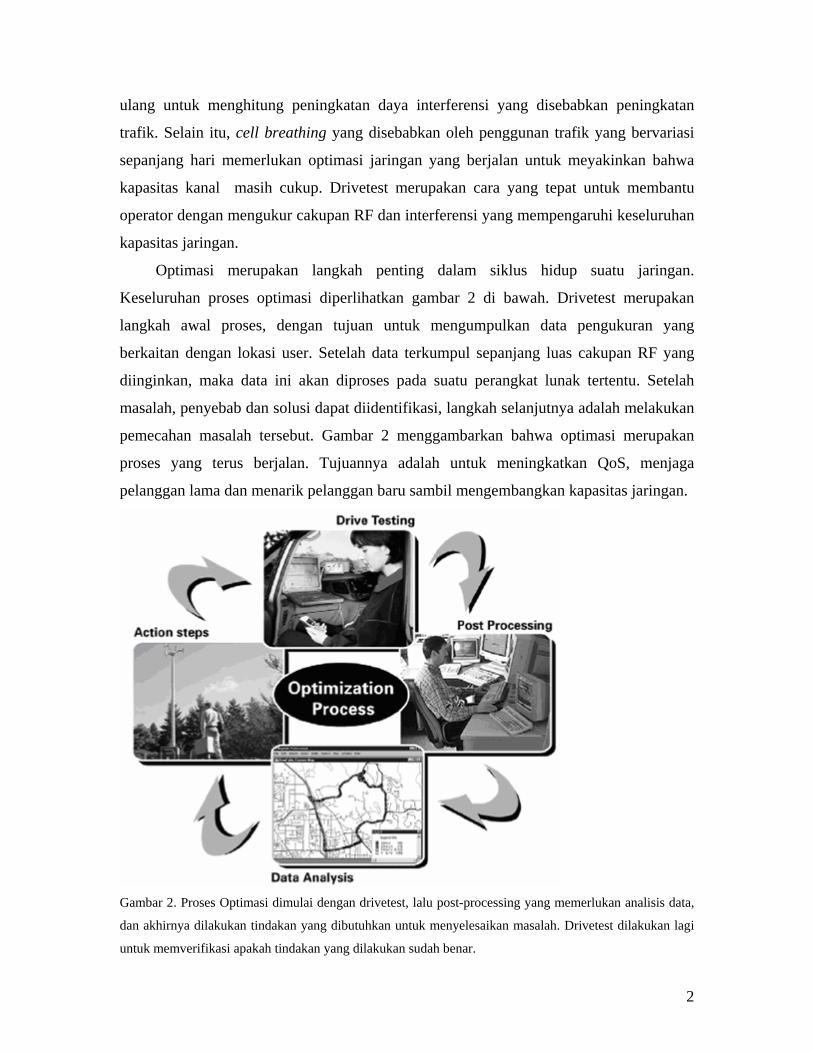
Optimasi merupakan langkah penting dalam siklus hidup suatu jaringan.
Keseluruhan proses optimasi diperlihatkan gambar 2 di bawah. Drivetest merupakan
langkah awal proses, dengan tujuan untuk mengumpulkan data pengukuran yang
berkaitan dengan lokasi user. Setelah data terkumpul sepanjang luas cakupan RF yang
diinginkan, maka data ini akan diproses pada suatu perangkat lunak tertentu. Setelah
masalah, penyebab dan solusi dapat diidentifikasi, langkah selanjutnya adalah melakukan
pemecahan masalah tersebut. Gambar 2 menggambarkan bahwa optimasi merupakan
proses yang terus berjalan. Tujuannya adalah untuk meningkatkan QoS, menjaga
pelanggan lama dan menarik pelanggan baru sambil mengembangkan kapasitas jaringan.
Gambar 2. Proses Optimasi dimulai dengan drivetest, lalu post-processing yang memerlukan analisis data,
dan akhirnya dilakukan tindakan yang dibutuhkan untuk menyelesaikan masalah. Drivetest dilakukan lagi
untuk memverifikasi apakah tindakan yang dilakukan sudah benar.
3
1.2. Prinsip Drivetest
Bagian ini menggambarkan konsep dasar drivetest. Baik operator ataupun vendor
pasti melakukan drivetest. Operator memerlukannya untuk mengoptimalkan kinerja
jaringannya, sementara sebuah situs sel baru dibangun, dan telah terjadi perubahan pada
lingkungan infrastruktur. Drivetest memungkinkan operator untuk melakukan optimasi
yang terus berjalan. Umumnya, drivetest CDMA dilakukan dengan menghubungkan MS
ke laptop. Pelanggan seluler dan PCS melihat kinerja layanan jaringan berdasarkan
cakupan jaringan dan kualitas panggilan. Perangkat drivetest menggunakan MS untuk
mensimulasikan masalah yang dialami pelanggan ketika akan/saat melakukan panggilan.
Sebagai contoh, jika panggilan pelanggan terputus ketika beroperasi di dalam obyek
bergerak pada suatu lokasi tertentu, maka perangkat drivetest harus mampu
mensimulasikan masalah ini.
Contoh lain masalah yang dialami pelanggan adalah panggilan yang diblokir
(kegagalan mendapatkan akses), kualitas suara yang buruk, dan cakupan area pelayanan
yang kurang. Sistem drivetest melakukan pengukuran, menyimpan data di computer, dan
menampilkan data menurut waktu dan tempat. Frame Erasure Rate (FER) adalah ukuran
pda MS yang megindikasikan kualitas sambungan.
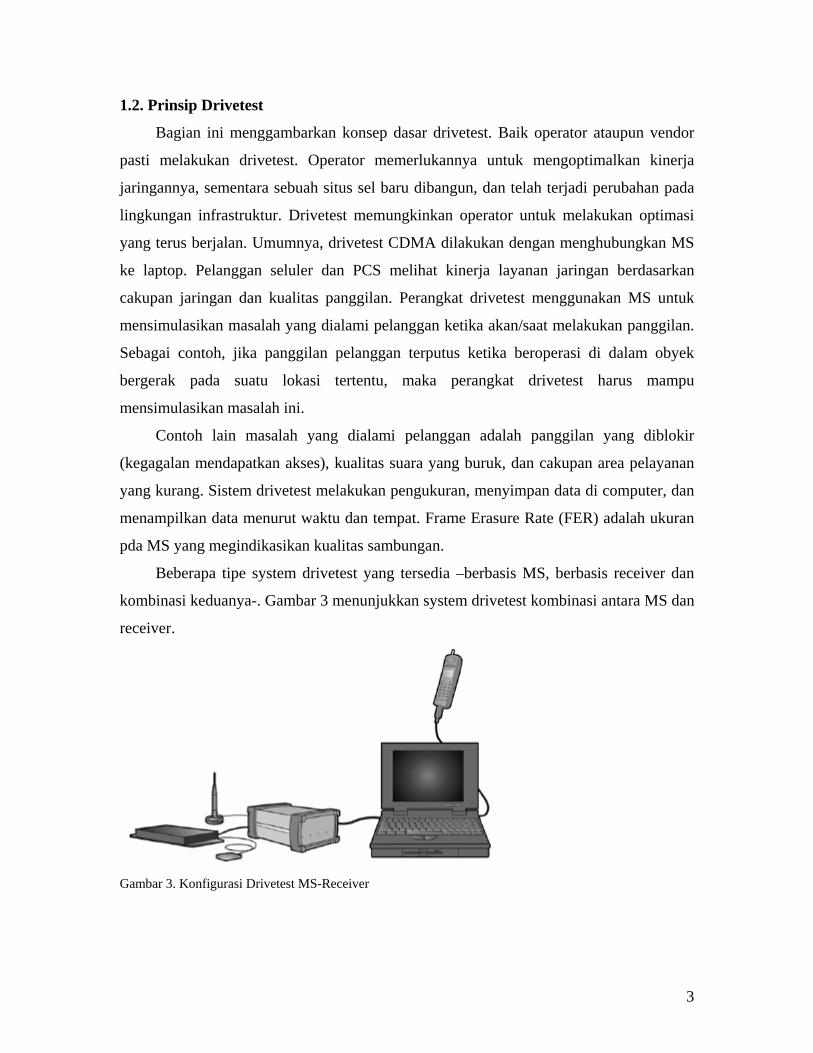
Beberapa tipe system drivetest yang tersedia –berbasis MS, berbasis receiver dan
kombinasi keduanya-. Gambar 3 menunjukkan system drivetest kombinasi antara MS dan
receiver.
Gambar 3. Konfigurasi Drivetest MS-Receiver
4
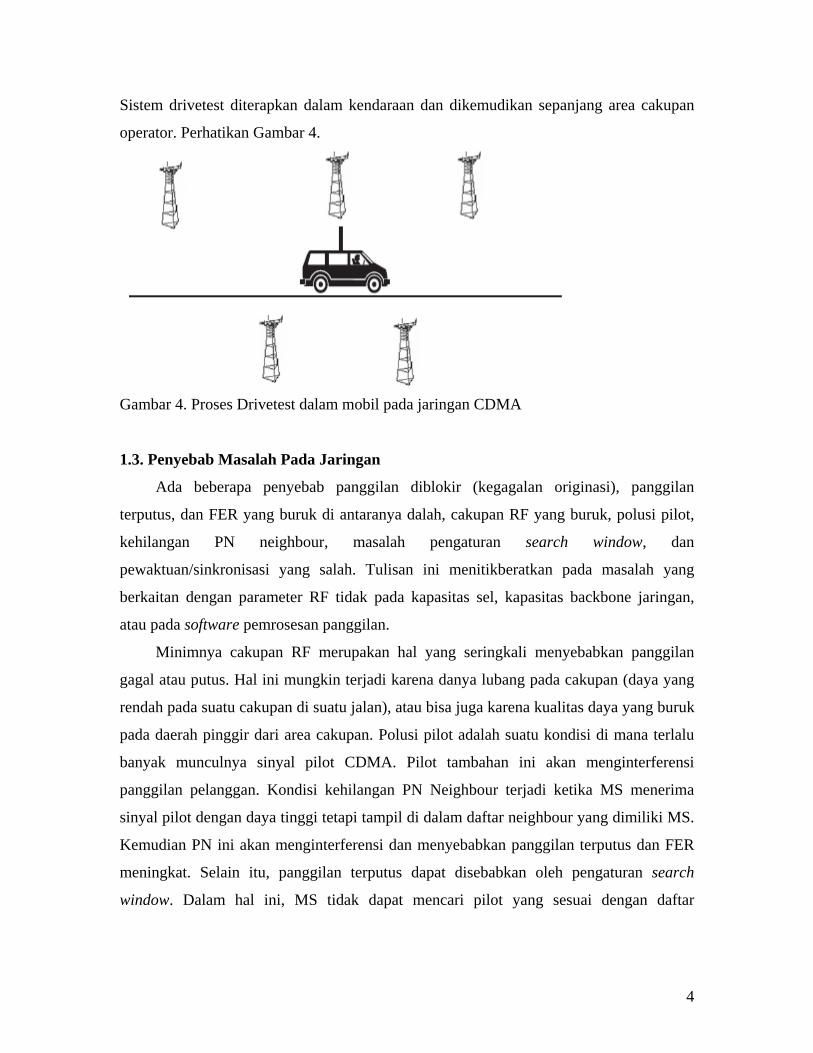
Sistem drivetest diterapkan dalam kendaraan dan dikemudikan sepanjang area cakupan
operator. Perhatikan Gambar 4.
Gambar 4. Proses Drivetest dalam mobil pada jaringan CDMA
1.3. Penyebab Masalah Pada Jaringan
Ada beberapa penyebab panggilan diblokir (kegagalan originasi), panggilan
terputus, dan FER yang buruk di antaranya dalah, cakupan RF yang buruk, polusi pilot,
kehilangan PN neighbour, masalah pengaturan search window, dan
pewaktuan/sinkronisasi yang salah. Tulisan ini menitikberatkan pada masalah yang
berkaitan dengan parameter RF tidak pada kapasitas sel, kapasitas backbone jaringan,
atau pada software pemrosesan panggilan.
Minimnya cakupan RF merupakan hal yang seringkali menyebabkan panggilan
gagal atau putus. Hal ini mungkin terjadi karena danya lubang pada cakupan (daya yang
rendah pada suatu cakupan di suatu jalan), atau bisa juga karena kualitas daya yang buruk
pada daerah pinggir dari area cakupan. Polusi pilot adalah suatu kondisi di mana terlalu
banyak munculnya sinyal pilot CDMA. Pilot tambahan ini akan menginterferensi
panggilan pelanggan. Kondisi kehilangan PN Neighbour terjadi ketika MS menerima
sinyal pilot dengan daya tinggi tetapi tampil di dalam daftar neighbour yang dimiliki MS.
Kemudian PN ini akan menginterferensi dan menyebabkan panggilan terputus dan FER
meningkat. Selain itu, panggilan terputus dapat disebabkan oleh pengaturan search
window. Dalam hal ini, MS tidak dapat mencari pilot yang sesuai dengan daftar
5
neighbournya. Akhirnya, pewaktuan BS yang salah akan menyebabkan panggilan
terputus, karena system CDMA bergantung pada pewaktuan yang sinkron antar BS.
2. Konsep CDMA 2.1. Latar Belakang
Pemahaman konsep CDMA yang mendalam akan sangat membantu proses
pengukuran dan pengolahan data nantinya. Jaringan seluler dan PCS menggunakan
konsep air interface CDMA yang berdasarkan standar IS-95 dan J-Std008. Jika
dibandingkan dengan membagi-bagi panggilan suara ke setiap kanal frekuensi,
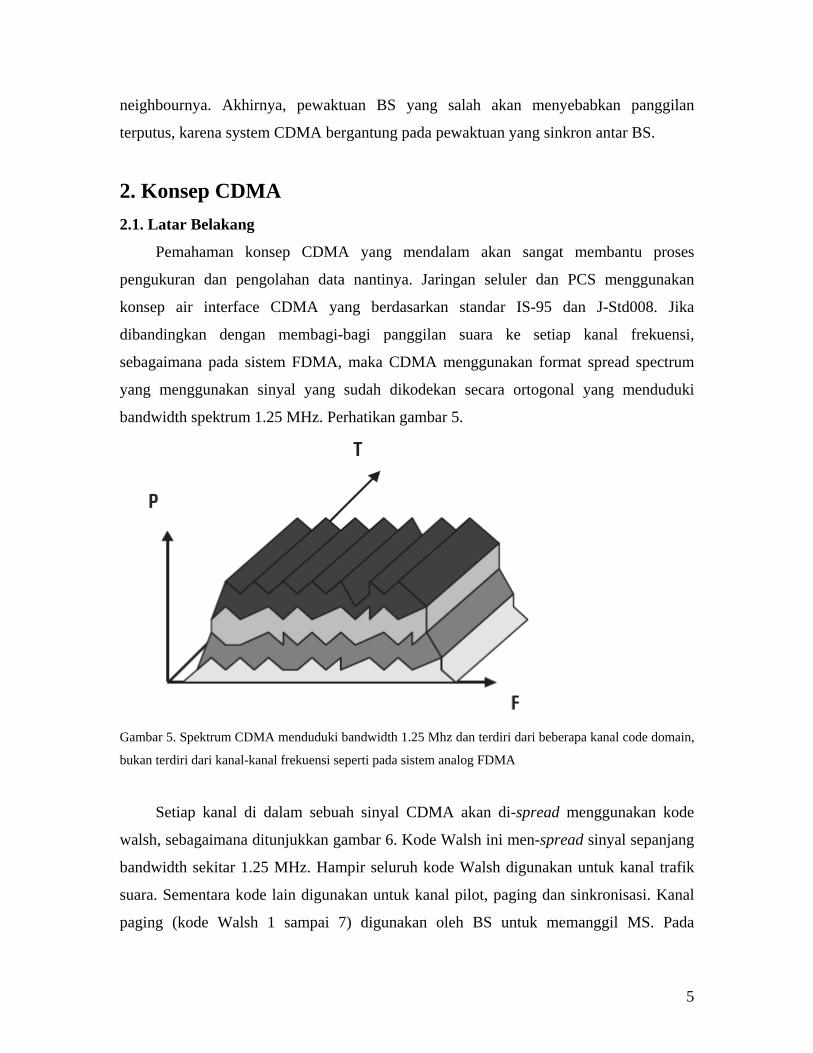
sebagaimana pada sistem FDMA, maka CDMA menggunakan format spread spectrum
yang menggunakan sinyal yang sudah dikodekan secara ortogonal yang menduduki
bandwidth spektrum 1.25 MHz. Perhatikan gambar 5.
Gambar 5. Spektrum CDMA menduduki bandwidth 1.25 Mhz dan terdiri dari beberapa kanal code domain,
bukan terdiri dari kanal-kanal frekuensi seperti pada sistem analog FDMA
Setiap kanal di dalam sebuah sinyal CDMA akan di-spread menggunakan kode
walsh, sebagaimana ditunjukkan gambar 6. Kode Walsh ini men-spread sinyal sepanjang
bandwidth sekitar 1.25 MHz. Hampir seluruh kode Walsh digunakan untuk kanal trafik
suara. Sementara kode lain digunakan untuk kanal pilot, paging dan sinkronisasi. Kanal
paging (kode Walsh 1 sampai 7) digunakan oleh BS untuk memanggil MS. Pada

6
konfigurasi jaringan umumnya, kode Walsh 1 digunakan untuk paging, sehingga kode 2
sampai 7 dapat digunakan untuk kanal trafik suara. Kanal sinkronisasi (kode Walsh 32)
digunakan untuk melakukan pewaktuan dengan MS. Perhatikan gambar 6.
Gambar 6. Kode Walsh yang terbagi menjadi beberapa sinyal CDMA dengan fungsi masing-masing
Untuk memahami bagaimana sinyal pilot bekerja, kita perlu memahami tentang
Short Code. Langkah terakhir untuk membangkitkan sinyal CDMA dalam BS adalah
modulasi data dengan sebuah sekuen pseudo-random yang disebut dengan short code
(kode pendek). Kode ini identik untuk seluruh BS, dengan satu pengecualian. Setiap BS
memiliki versi delay fasa yang berbeda dari setiap kode yang sama. Hal ini diperlihatkan
dengan pergeseran waktu yang diukur dalam chip. (Satu chip sekitar 0,8 mikrodetik).
Perbedaan waktu dalam kode inilah mengidentifikasi setiap BS dengan unik. Perbedaan
waktu (time offset) ini pada dasarnya bertindak sebagai kode pewarna.
Kanal pilot (kode Walsh 0) merupakan versi dari kode pendek tersebut yang tidak
dapat dimodifikasi. Oleh karena itu identik untuk setiap BS, dnegan pengecualian pada
pewaktuan pada pembangkit kode pendek tersebut. Pergeseran/perbedaan pewaktuan
kanal pilot inilah yang mengidentifikasikan BS tertentu dari BS lain, dan sehingga
berkomunikasi dengan BS yang sudah ditentukan.
Perbedaan pewaktuan kanal pilot ini diekspresikan dengan „PN Offset“ yang
merujuk pada suatu waktu absolut. Sekuen kode ini berulang setiap 2 detik, yang
merupakan periode jam detik-genap pada GPS. Oleh karena itu, PN 0 mensejajarkan
dengan permulaan periode kode pendek itu, tepat pada jam GPS. PN 1 diberi pewaktuan
dengan 64 chip. PN 2 memiliki 128 chip lebih tinggi dari PN 0, dan seterusnya. PN
(Pseudo Noise) merupakan istilah yang terkait dengan teori spread spectrum. Ada sampai
512 PN Offset yang unik yang disediakan untuk operator, meskipun hanya satu PN offset
7
yang biasanya digunakan. Kumpulan PN-PN ini dikelompokkan dalam kelipatan integer
dari sebuah nila ON yang dikenal dengan istilah PN Increment.
PN increment yang umumnya digunakan adalah 3, 4, 6. PN increment 3 berarti PN
0, PN 3, PN 6, dst, akan diperuntukkan bagi satu BS atau sektor BS di dalam suatu
jaringan. Setiap operator CDMA akan memilih nilai PN inkremen berdasarkan
kepadatan BS-nya. PN inkremen 3 akan menyediakan lebih banyak PN offset
dibandingkan dengan PN inkremen 6, dilihat dari pembagian antara 512 dengan PN
inkremen. Nilai PN ini mungkin akan digunakan di dalam jaringan yang sama, pada BS
yang teletak pada jarak yang cukup jauh dan antenanya diarahkan saling menjauh.
Nilai kanal pilot ini lah yang diukur oleh sistem drivetest berbasis receiver. Untuk
mengidentifikasi BS, receiver mengukur offset pewaktuan dari short code pada kanal
pilot. Receiver mendapatkan pewaktuan yang tepat ini dari sinyal referensi pulse-per-
second yang didapat dari standar GPS Receiver. Beberapa contoh pilot BS akan
ditunjukkan nanti. MS juga dapat mengukur sinyal pilot. Hanya saja, pilot mana yang
dapat diukur MS bergantung pada jaringan yang terkait dengan neighbour list MS.
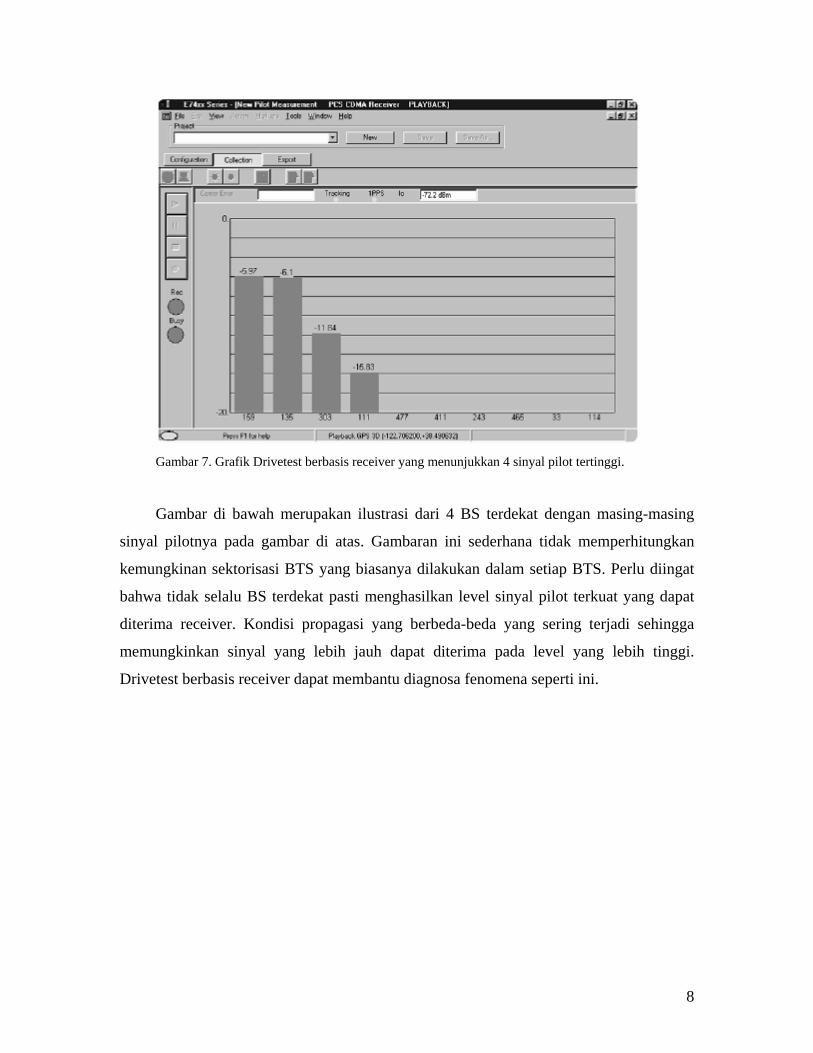
2.2. Pengukuran Sinyal Pilot
Sistem pengukuran drivetest memanfaatkan prinsip bahwa kanal pilot (kode walsh
0) akan terus mengirim secara kontinu dan mampu mengidentifikasi BS. Dengan
penelusuran pilot-pilot ini, pengguna dengan cepat dapat mengetahui cakupan RF dalam
suatu jaringan nirkabel. Gambar di bawah menampilkan level dari pilot-pilot terkuat yang
diukur dengan receiver digital CDMA (yang tidak terukur terikat dengan suatu jaringan
operator). Perhatikan bahwa PN offset ditunjukkan di domain horizontal pada batang
grafik di bawah. PN ini menunjukkan BS atau sektor BS mana yang mengirimkan setiap
sinyal pilot. Nilai di atas batangan grafik menunjukkan nilai Ec/Io dari setiap sinyal pilot.
Ini merupakan ukuran amplitudo relatif setiap BS yang diterima receiver drivetest.
8
Gambar 7. Grafik Drivetest berbasis receiver yang menunjukkan 4 sinyal pilot tertinggi.
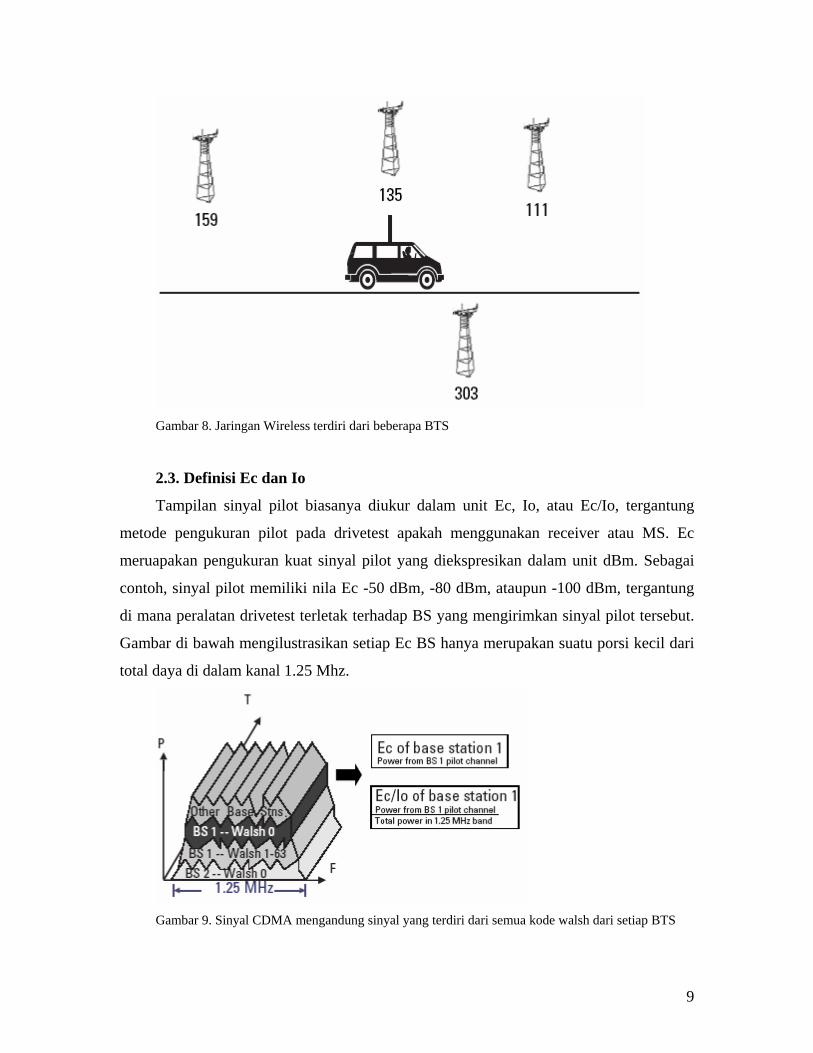
Gambar di bawah merupakan ilustrasi dari 4 BS terdekat dengan masing-masing
sinyal pilotnya pada gambar di atas. Gambaran ini sederhana tidak memperhitungkan
kemungkinan sektorisasi BTS yang biasanya dilakukan dalam setiap BTS. Perlu diingat
bahwa tidak selalu BS terdekat pasti menghasilkan level sinyal pilot terkuat yang dapat
diterima receiver. Kondisi propagasi yang berbeda-beda yang sering terjadi sehingga
memungkinkan sinyal yang lebih jauh dapat diterima pada level yang lebih tinggi.
Drivetest berbasis receiver dapat membantu diagnosa fenomena seperti ini.
9
Gambar 8. Jaringan Wireless terdiri dari beberapa BTS
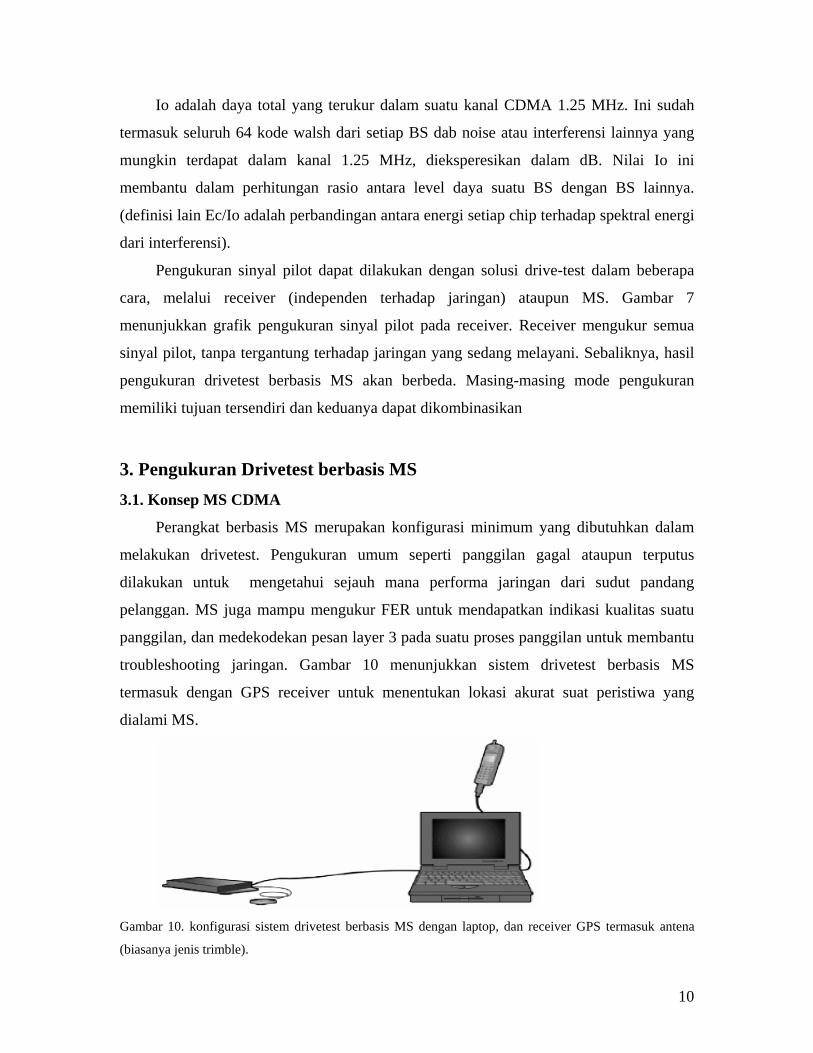
2.3. Definisi Ec dan Io
Tampilan sinyal pilot biasanya diukur dalam unit Ec, Io, atau Ec/Io, tergantung
metode pengukuran pilot pada drivetest apakah menggunakan receiver atau MS. Ec
meruapakan pengukuran kuat sinyal pilot yang diekspresikan dalam unit dBm. Sebagai
contoh, sinyal pilot memiliki nila Ec -50 dBm, -80 dBm, ataupun -100 dBm, tergantung
di mana peralatan drivetest terletak terhadap BS yang mengirimkan sinyal pilot tersebut.
Gambar di bawah mengilustrasikan setiap Ec BS hanya merupakan suatu porsi kecil dari
total daya di dalam kanal 1.25 Mhz.
Gambar 9. Sinyal CDMA mengandung sinyal yang terdiri dari semua kode walsh dari setiap BTS
10
Io adalah daya total yang terukur dalam suatu kanal CDMA 1.25 MHz. Ini sudah
termasuk seluruh 64 kode walsh dari setiap BS dab noise atau interferensi lainnya yang
mungkin terdapat dalam kanal 1.25 MHz, dieksperesikan dalam dB. Nilai Io ini
membantu dalam perhitungan rasio antara level daya suatu BS dengan BS lainnya.
(definisi lain Ec/Io adalah perbandingan antara energi setiap chip terhadap spektral energi
dari interferensi).
Pengukuran sinyal pilot dapat dilakukan dengan solusi drive-test dalam beberapa
cara, melalui receiver (independen terhadap jaringan) ataupun MS. Gambar 7
menunjukkan grafik pengukuran sinyal pilot pada receiver. Receiver mengukur semua
sinyal pilot, tanpa tergantung terhadap jaringan yang sedang melayani. Sebaliknya, hasil
pengukuran drivetest berbasis MS akan berbeda. Masing-masing mode pengukuran
memiliki tujuan tersendiri dan keduanya dapat dikombinasikan
3. Pengukuran Drivetest berbasis MS 3.1. Konsep MS CDMA
Perangkat berbasis MS merupakan konfigurasi minimum yang dibutuhkan dalam
melakukan drivetest. Pengukuran umum seperti panggilan gagal ataupun terputus
dilakukan untuk mengetahui sejauh mana performa jaringan dari sudut pandang
pelanggan. MS juga mampu mengukur FER untuk mendapatkan indikasi kualitas suatu
panggilan, dan medekodekan pesan layer 3 pada suatu proses panggilan untuk membantu
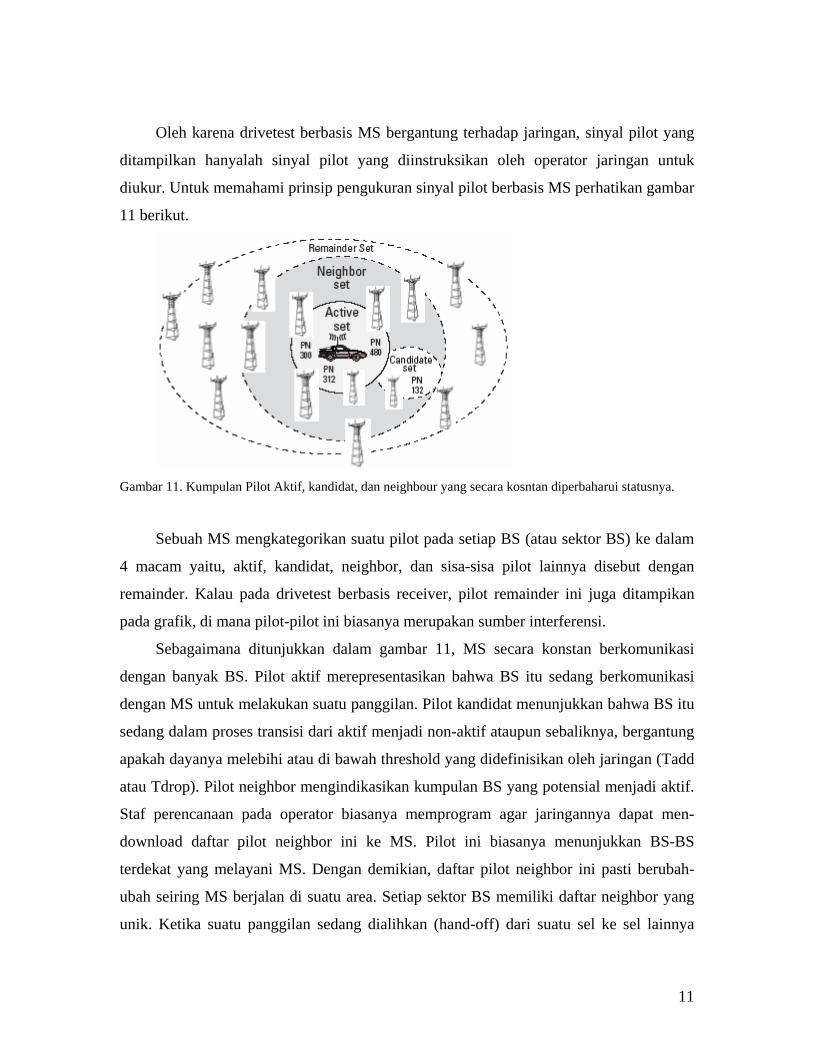
troubleshooting jaringan. Gambar 10 menunjukkan sistem drivetest berbasis MS
termasuk dengan GPS receiver untuk menentukan lokasi akurat suat peristiwa yang
dialami MS.
Gambar 10. konfigurasi sistem drivetest berbasis MS dengan laptop, dan receiver GPS termasuk antena
(biasanya jenis trimble).
11
Oleh karena drivetest berbasis MS bergantung terhadap jaringan, sinyal pilot yang
ditampilkan hanyalah sinyal pilot yang diinstruksikan oleh operator jaringan untuk
diukur. Untuk memahami prinsip pengukuran sinyal pilot berbasis MS perhatikan gambar
11 berikut.
Gambar 11. Kumpulan Pilot Aktif, kandidat, dan neighbour yang secara kosntan diperbaharui statusnya.
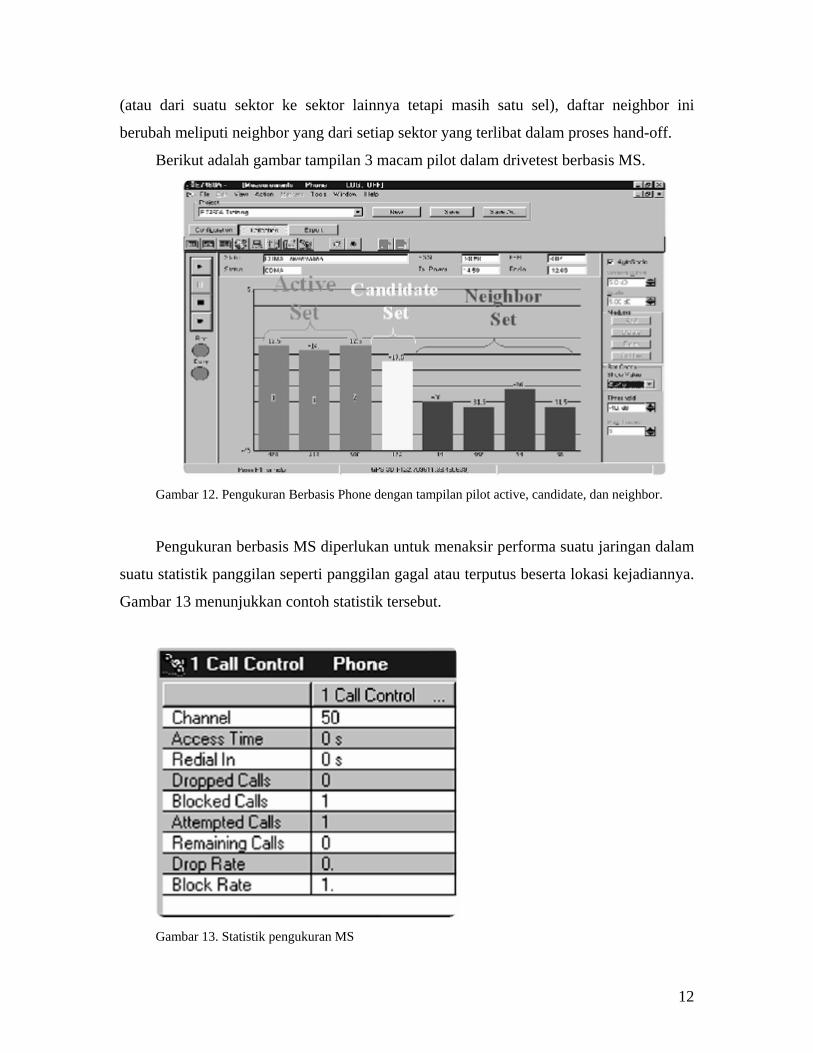
Sebuah MS mengkategorikan suatu pilot pada setiap BS (atau sektor BS) ke dalam
4 macam yaitu, aktif, kandidat, neighbor, dan sisa-sisa pilot lainnya disebut dengan
remainder. Kalau pada drivetest berbasis receiver, pilot remainder ini juga ditampikan
pada grafik, di mana pilot-pilot ini biasanya merupakan sumber interferensi.
Sebagaimana ditunjukkan dalam gambar 11, MS secara konstan berkomunikasi
dengan banyak BS. Pilot aktif merepresentasikan bahwa BS itu sedang berkomunikasi
dengan MS untuk melakukan suatu panggilan. Pilot kandidat menunjukkan bahwa BS itu
sedang dalam proses transisi dari aktif menjadi non-aktif ataupun sebaliknya, bergantung
apakah dayanya melebihi atau di bawah threshold yang didefinisikan oleh jaringan (Tadd
atau Tdrop). Pilot neighbor mengindikasikan kumpulan BS yang potensial menjadi aktif.
Staf perencanaan pada operator biasanya memprogram agar jaringannya dapat men-
download daftar pilot neighbor ini ke MS. Pilot ini biasanya menunjukkan BS-BS
terdekat yang melayani MS. Dengan demikian, daftar pilot neighbor ini pasti berubah-
ubah seiring MS berjalan di suatu area. Setiap sektor BS memiliki daftar neighbor yang
unik. Ketika suatu panggilan sedang dialihkan (hand-off) dari suatu sel ke sel lainnya
12
(atau dari suatu sektor ke sektor lainnya tetapi masih satu sel), daftar neighbor ini
berubah meliputi neighbor yang dari setiap sektor yang terlibat dalam proses hand-off.
Berikut adalah gambar tampilan 3 macam pilot dalam drivetest berbasis MS.
Gambar 12. Pengukuran Berbasis Phone dengan tampilan pilot active, candidate, dan neighbor.
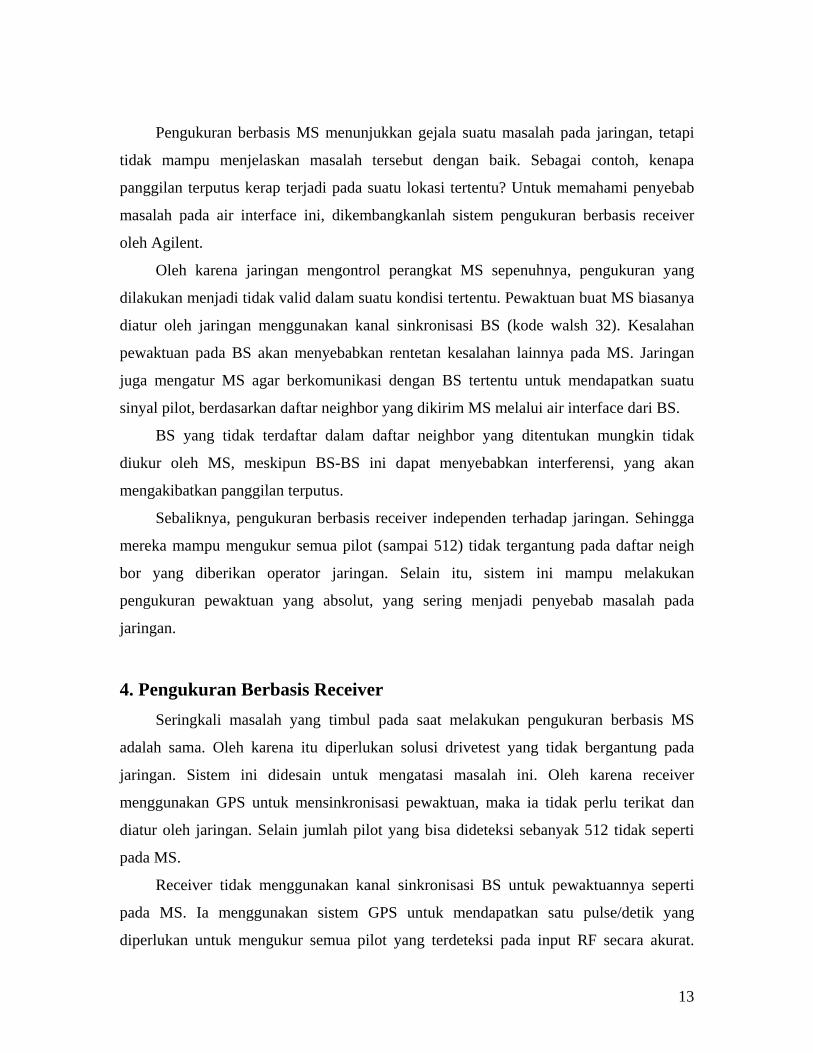
Pengukuran berbasis MS diperlukan untuk menaksir performa suatu jaringan dalam
suatu statistik panggilan seperti panggilan gagal atau terputus beserta lokasi kejadiannya.
Gambar 13 menunjukkan contoh statistik tersebut.
Gambar 13. Statistik pengukuran MS
13
Pengukuran berbasis MS menunjukkan gejala suatu masalah pada jaringan, tetapi
tidak mampu menjelaskan masalah tersebut dengan baik. Sebagai contoh, kenapa
panggilan terputus kerap terjadi pada suatu lokasi tertentu? Untuk memahami penyebab
masalah pada air interface ini, dikembangkanlah sistem pengukuran berbasis receiver
oleh Agilent.
Oleh karena jaringan mengontrol perangkat MS sepenuhnya, pengukuran yang
dilakukan menjadi tidak valid dalam suatu kondisi tertentu. Pewaktuan buat MS biasanya
diatur oleh jaringan menggunakan kanal sinkronisasi BS (kode walsh 32). Kesalahan
pewaktuan pada BS akan menyebabkan rentetan kesalahan lainnya pada MS. Jaringan
juga mengatur MS agar berkomunikasi dengan BS tertentu untuk mendapatkan suatu
sinyal pilot, berdasarkan daftar neighbor yang dikirim MS melalui air interface dari BS.
BS yang tidak terdaftar dalam daftar neighbor yang ditentukan mungkin tidak
diukur oleh MS, meskipun BS-BS ini dapat menyebabkan interferensi, yang akan
mengakibatkan panggilan terputus.
Sebaliknya, pengukuran berbasis receiver independen terhadap jaringan. Sehingga
mereka mampu mengukur semua pilot (sampai 512) tidak tergantung pada daftar neigh
bor yang diberikan operator jaringan. Selain itu, sistem ini mampu melakukan
pengukuran pewaktuan yang absolut, yang sering menjadi penyebab masalah pada
jaringan.
4. Pengukuran Berbasis Receiver Seringkali masalah yang timbul pada saat melakukan pengukuran berbasis MS
adalah sama. Oleh karena itu diperlukan solusi drivetest yang tidak bergantung pada
jaringan. Sistem ini didesain untuk mengatasi masalah ini. Oleh karena receiver
menggunakan GPS untuk mensinkronisasi pewaktuan, maka ia tidak perlu terikat dan
diatur oleh jaringan. Selain jumlah pilot yang bisa dideteksi sebanyak 512 tidak seperti
pada MS.
Receiver tidak menggunakan kanal sinkronisasi BS untuk pewaktuannya seperti
pada MS. Ia menggunakan sistem GPS untuk mendapatkan satu pulse/detik yang
diperlukan untuk mengukur semua pilot yang terdeteksi pada input RF secara akurat.
14
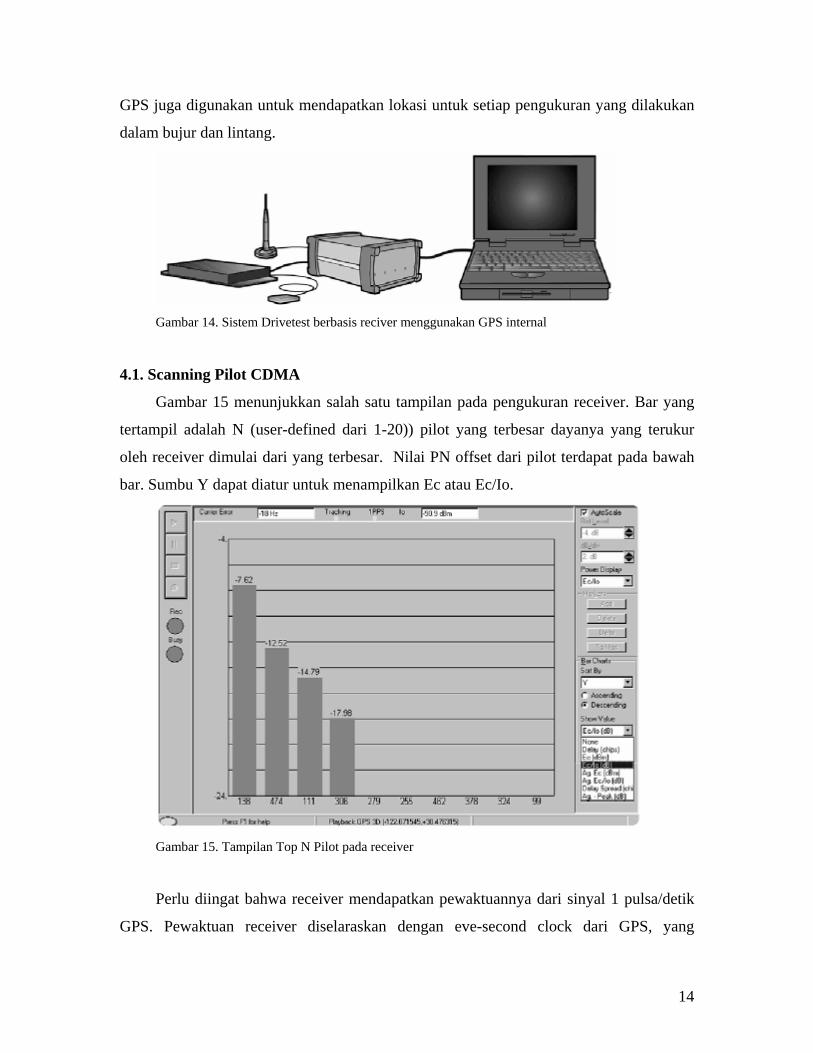
GPS juga digunakan untuk mendapatkan lokasi untuk setiap pengukuran yang dilakukan
dalam bujur dan lintang.
Gambar 14. Sistem Drivetest berbasis reciver menggunakan GPS internal
4.1. Scanning Pilot CDMA
Gambar 15 menunjukkan salah satu tampilan pada pengukuran receiver. Bar yang
tertampil adalah N (user-defined dari 1-20)) pilot yang terbesar dayanya yang terukur
oleh receiver dimulai dari yang terbesar. Nilai PN offset dari pilot terdapat pada bawah
bar. Sumbu Y dapat diatur untuk menampilkan Ec atau Ec/Io.
Gambar 15. Tampilan Top N Pilot pada receiver
Perlu diingat bahwa receiver mendapatkan pewaktuannya dari sinyal 1 pulsa/detik
GPS. Pewaktuan receiver diselaraskan dengan eve-second clock dari GPS, yang

15
merupakan sinyal pewaktuan yang serupa dengan yang digunakan oleh BS CDMA.
Untuk mengukur pilot dengan akurat, receiver perlu informasi PN inkremen untuk suatu
jaringan tertentu. PN inkremen merupakan cara pemberian jarak antar sinyal pilot yang
ditentukan oleh operator. PN inkremen 3 berarti PN0, PN3, PN6, dst, dapat digunakan
oleh operator. User harus memasukkan nilai PN inkremen ini pada GUI pengukuran
receiver.
4.2. Pengukuran Polusi Pilot
Bentuk interferensi lainnya pada jaringan CDMA adalah polusi pilot. Polusi pilot
adalah fenomena yang ditunjukkan dengan adanya lebih dari 3 pilot yang memiliki daya
yang sangat kuat. Rake receiver pada MS memiliki 3 “jari” yang digunakan untuk
mendemodulasi sampai dengan 3 pilot yang berbeda untuk proses soft hand-off, atau
untuk mendemodulasi sampai dengan 3 komponen multipath dari satu pilot yang sama,
sambil menjaga koneksi panggilan dalam kondisi daya sinyal yang diterima rendah
(kombinasi soft hand-off dan multipath juga dapat terjadi). Jika ada lebih dari 3 sinyal
pilot yang diterima rake receiver pada satu waktu, maka proses soft-handoff akan tidak
berjalan. Jika ada sampai 4 atau 5 pilot yang aktif maka akan mengakibatkan level Io
yang berlebihan, dan pada akhirnya mengakibatkan Ec/Io yang buruk. Hal ini selanjutnya
menyebabkan FER yang lebih tinggi dan berpotensi menyebabkan panggilan terputus
yang sering terjadi.
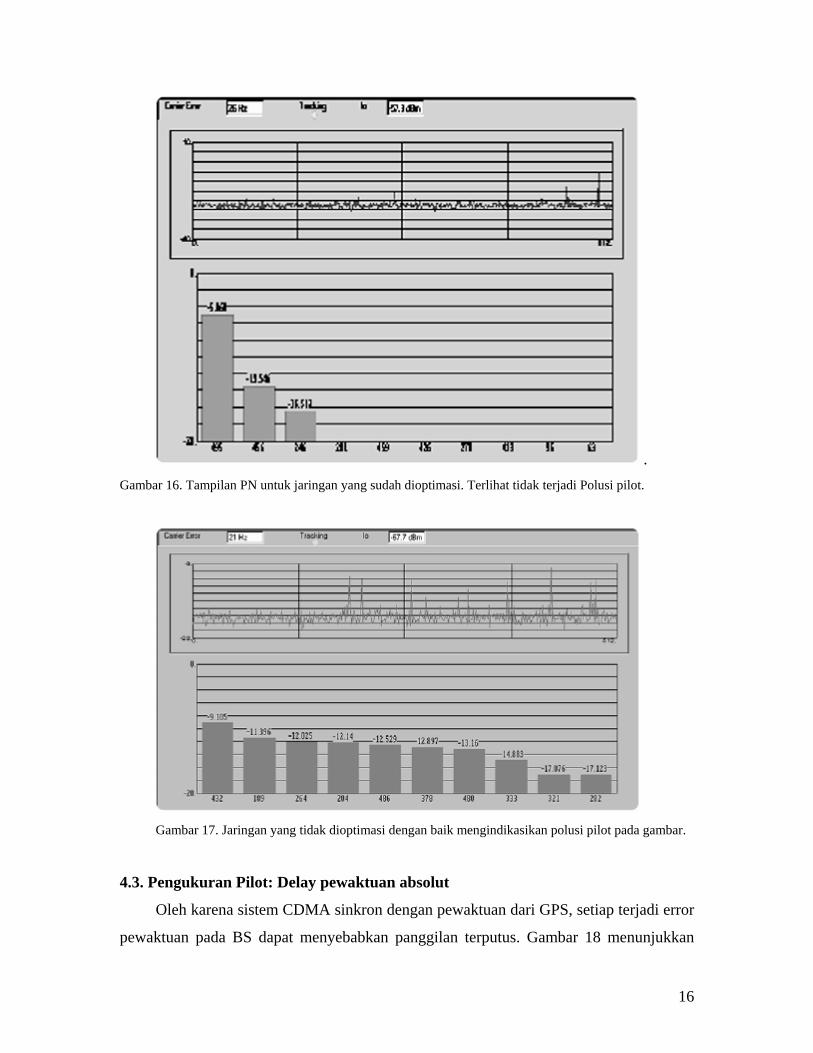
Gambar 16 dan 17 menunjukkan jaringan dengan kondisi pilot yang baik (3 pilot
yang kuat dayanya) dan buruk (tujuh sampai delapan pilot yang tinggi dayanya). Polusi
pilot mudah diukurjika menggunakan sistem drivetest berbasis receiver, karena mampu
mengukur semua pilot yang ada. Polusi pilot sering berkaitan dengan missing neighbor.
Menggunakan sistem receiver sekaligus MS disertai software alarm akan membantu
pendeteksian masalah pada suatu durasi waktu yang pendek. Dengan demikian biaya
operasi dapat ditekan, dibandingkan hanya dengan menggunakan sistem berbasis MS
yang memerlukan banyak multiple port atau driver, termasuk SDM.
16
. Gambar 16. Tampilan PN untuk jaringan yang sudah dioptimasi. Terlihat tidak terjadi Polusi pilot.
Gambar 17. Jaringan yang tidak dioptimasi dengan baik mengindikasikan polusi pilot pada gambar.
4.3. Pengukuran Pilot: Delay pewaktuan absolut
Oleh karena sistem CDMA sinkron dengan pewaktuan dari GPS, setiap terjadi error
pewaktuan pada BS dapat menyebabkan panggilan terputus. Gambar 18 menunjukkan

17
tampilan pilot Top N receiver dengan nilai pada bar merupakan waktu tunda dalam unit
chip. Satu chip sekitar 0,8 mikodetik (1 dibagi 1.25 Mchip/detik). Untuk mengukur
kesalahan pewaktuan pada BS, kendaraan drivetest harus terletak tidak jauh dari BS. Jika
tidak, sistem tidak mampu membedakan antara kesalahan pewaktuan BS dengan delay
propagasi. Pengukuran delay pewaktuan juga mempunyai tujuan lain. Oleh karena delay
propagasi kurang lebih sebesar 6 chip tiap mil, dengan demikian delay yang terukur dapat
digunakan untuk menentukan jarak antara MS dengan BS yang diukur. Sebagai contoh,
jika delay yang terukur 62 chip maka diperkirakan BS terletak 62 mil dari MS, asumsi
propagasinya LOS.
Gambar 18. Pengukuran Absolute Timing Delay
Seringkali, pilot dengan delay yang berlebihan tidak akan terdaftar dalam daftar
neighbor atau berada pada luar jangkauan search window dari MS (fenomena ini disebut
dengan missing neighbor list). Dengan receiver, sistem tidak hanya mampu mencari pilot
neighbor yang menghilang, tapi juga menyediakan informasi delay pewaktuan yang
dengan cepat membantu menganalisa sumber masalah.
4.4. Pengukuran Pilot: Pengamatan Multipath
18
Sistem receiver juga mampu menagamati multipath dari suatu sinyal pilot.
Multipath termasuk komponen-komponen dari sinyal transmisi yang sama, yang
mengandung beberapa jalur propagasi dikarenakan pantulan bukit, gedung, refraksi,
absorpsi, dll. Karakteristik multipath perlu diperhatikan untuk mengoptimalkan dengan
tepat pengaturan search window dari MS. Yang dimaksud dengan search window MS
adalah interval waktu sepanjang pencarian pilot yang dilakukan MS. Jika search window
terlalu lebar, MS akan banyak membuang waktu untuk mencoba mengkorelasikan daya
sinyal yang diterima dengan delay yang lama. Jika search window terlalu sempit, delay
pewaktuan sistem akan menyebabkan sinyal tidak dapat ditemukan.
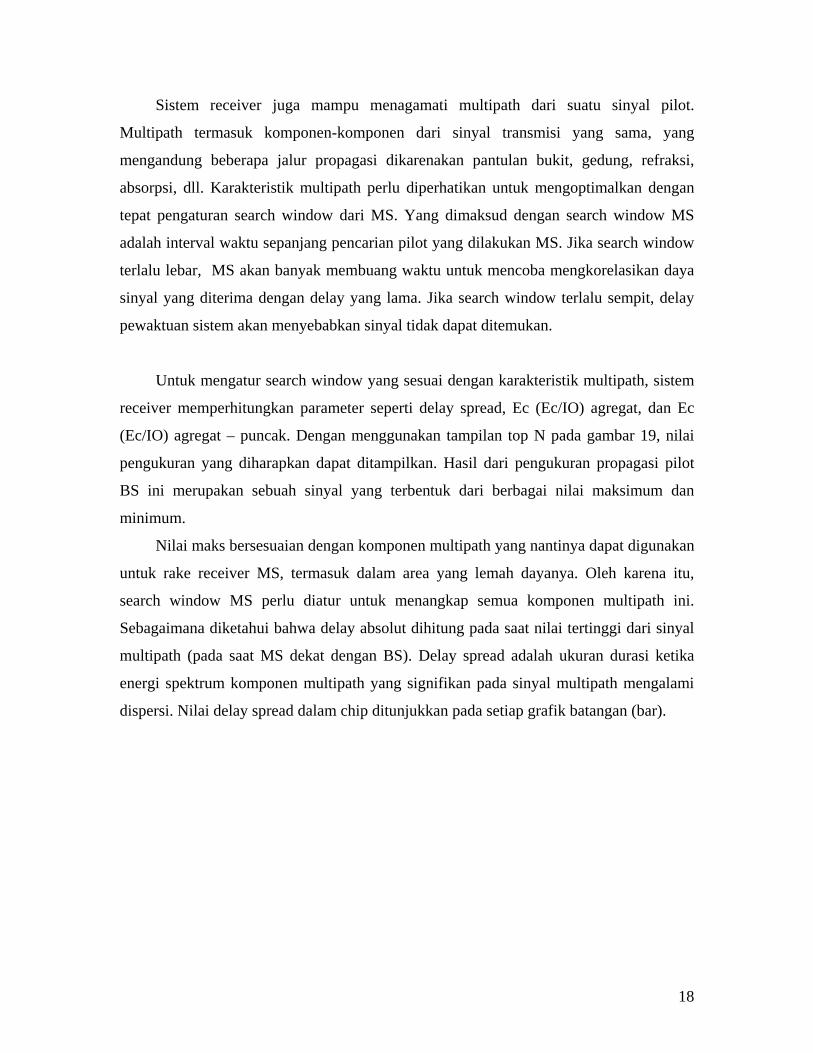
Untuk mengatur search window yang sesuai dengan karakteristik multipath, sistem
receiver memperhitungkan parameter seperti delay spread, Ec (Ec/IO) agregat, dan Ec
(Ec/IO) agregat – puncak. Dengan menggunakan tampilan top N pada gambar 19, nilai
pengukuran yang diharapkan dapat ditampilkan. Hasil dari pengukuran propagasi pilot
BS ini merupakan sebuah sinyal yang terbentuk dari berbagai nilai maksimum dan
minimum.
Nilai maks bersesuaian dengan komponen multipath yang nantinya dapat digunakan
untuk rake receiver MS, termasuk dalam area yang lemah dayanya. Oleh karena itu,
search window MS perlu diatur untuk menangkap semua komponen multipath ini.
Sebagaimana diketahui bahwa delay absolut dihitung pada saat nilai tertinggi dari sinyal
multipath (pada saat MS dekat dengan BS). Delay spread adalah ukuran durasi ketika
energi spektrum komponen multipath yang signifikan pada sinyal multipath mengalami
dispersi. Nilai delay spread dalam chip ditunjukkan pada setiap grafik batangan (bar).
19
Gambar 19. Pengukuran Delay spread, membantu untuk mengenali karakteristik multipath
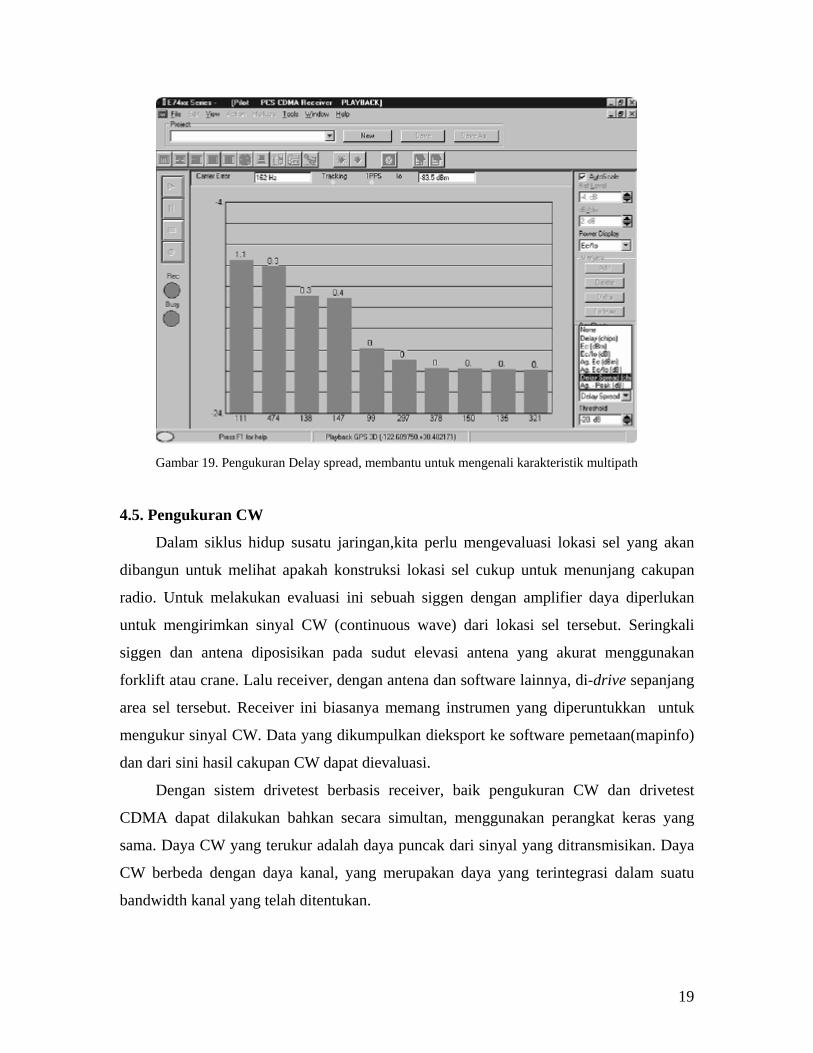
4.5. Pengukuran CW
Dalam siklus hidup susatu jaringan,kita perlu mengevaluasi lokasi sel yang akan
dibangun untuk melihat apakah konstruksi lokasi sel cukup untuk menunjang cakupan
radio. Untuk melakukan evaluasi ini sebuah siggen dengan amplifier daya diperlukan
untuk mengirimkan sinyal CW (continuous wave) dari lokasi sel tersebut. Seringkali
siggen dan antena diposisikan pada sudut elevasi antena yang akurat menggunakan
forklift atau crane. Lalu receiver, dengan antena dan software lainnya, di-drive sepanjang
area sel tersebut. Receiver ini biasanya memang instrumen yang diperuntukkan untuk
mengukur sinyal CW. Data yang dikumpulkan dieksport ke software pemetaan(mapinfo)
dan dari sini hasil cakupan CW dapat dievaluasi.
Dengan sistem drivetest berbasis receiver, baik pengukuran CW dan drivetest
CDMA dapat dilakukan bahkan secara simultan, menggunakan perangkat keras yang
sama. Daya CW yang terukur adalah daya puncak dari sinyal yang ditransmisikan. Daya
CW berbeda dengan daya kanal, yang merupakan daya yang terintegrasi dalam suatu
bandwidth kanal yang telah ditentukan.
20
Gambar 20. Pengukuran daya CW menggunakan receiver digunakan untuk proses mengevaluasi suatu
lokasi sel yang akan dibangun.
4.6. Pengukuran Daya Kanal
Sebagai contoh, jika bandwidth kanal diatur pada 1.25 MHz, fungsi pengukuran
daya kanal akan mengukur daya pada seluruh kanal CDMA. Atau, jika kita akan
mengukur sistem selular analog, maka bandwidth daya kanal diatur pada 30 KHz. Daya
kanal 1.25 MHz setara dengan nilai Io yang ditampilkan dalam tampilan panel depan
pilot virtual.
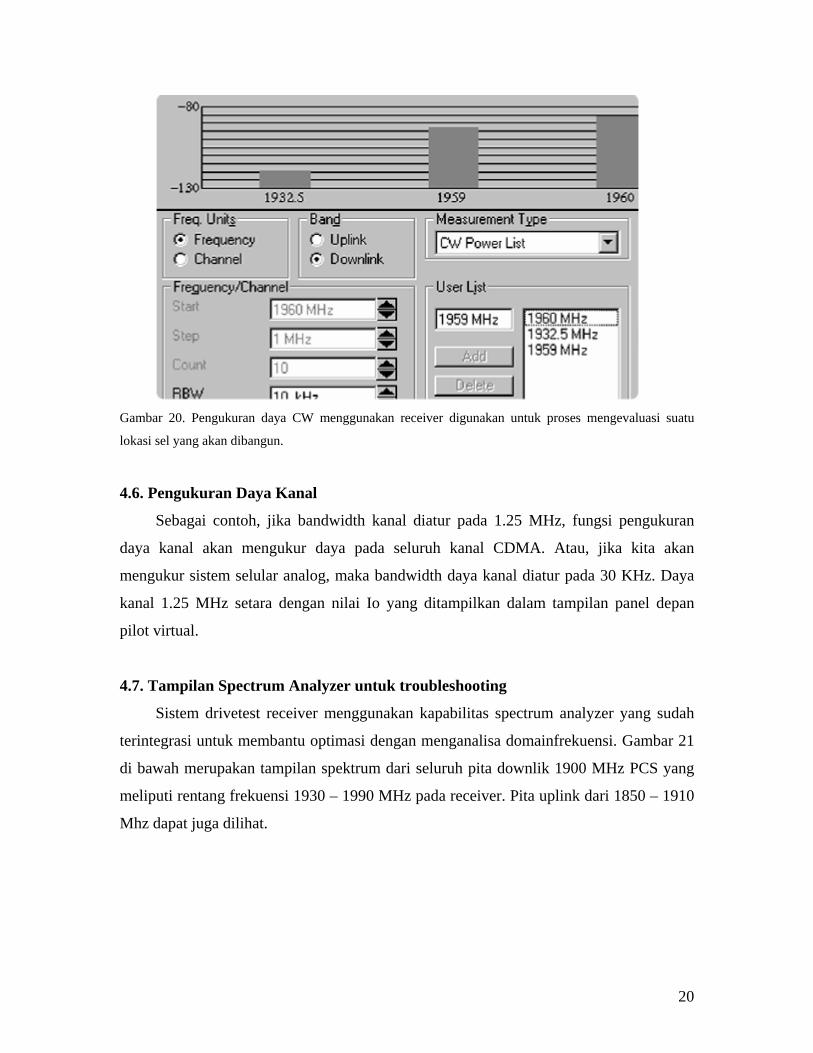
4.7. Tampilan Spectrum Analyzer untuk troubleshooting
Sistem drivetest receiver menggunakan kapabilitas spectrum analyzer yang sudah
terintegrasi untuk membantu optimasi dengan menganalisa domainfrekuensi. Gambar 21
di bawah merupakan tampilan spektrum dari seluruh pita downlik 1900 MHz PCS yang
meliputi rentang frekuensi 1930 – 1990 MHz pada receiver. Pita uplink dari 1850 – 1910
Mhz dapat juga dilihat.
21
Gambar 21. Tampilan Spektrum pada Receiver, di gambar terlihat marker yang diletakkan pada
carrier CDMA dan beberapa sinyal GSM.
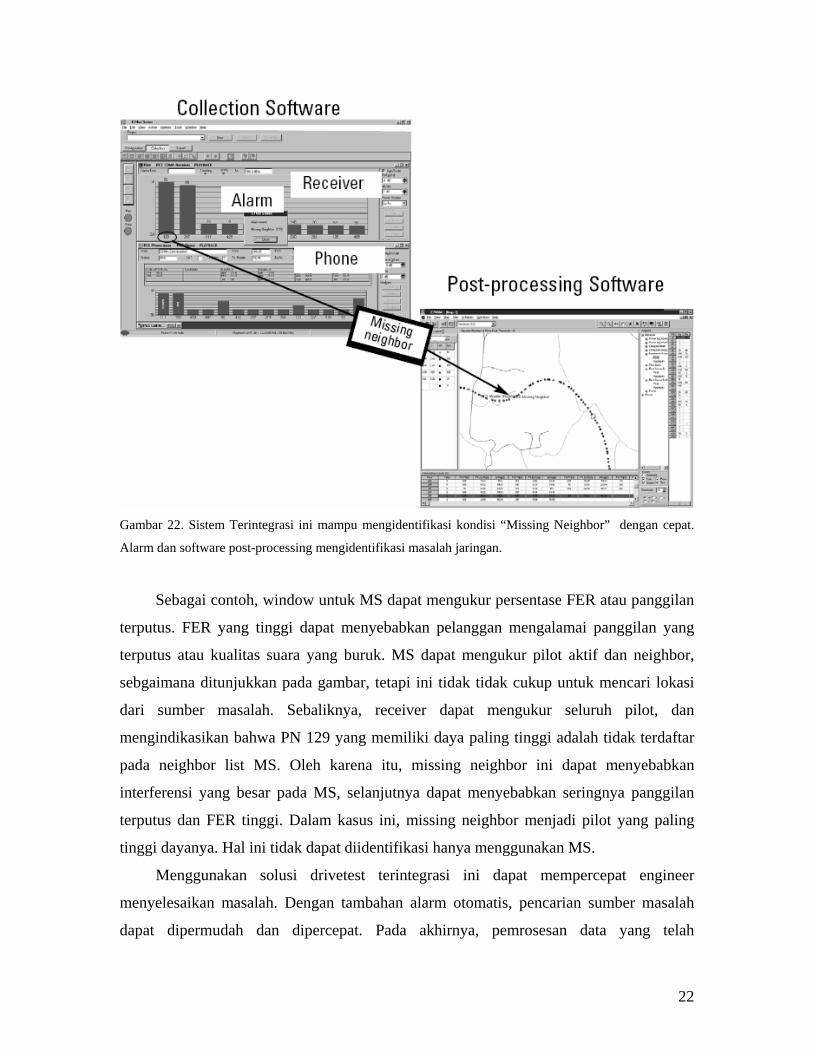
4.8. Sistem MS dan Receiver yang terintegrasi
Sistem ini akan mebantu optimasi yang lebih akurat. Gambar 22 menunjukkan
bagaimana sistem ini mampu menentukan sumber dari masalah Air-interface jaringan. Di
mana MS menunjukkan gejala dari masalah yang terjadi, dan receiver menunjukkan
kenapa masalah itu terjadi.
22
Gambar 22. Sistem Terintegrasi ini mampu mengidentifikasi kondisi “Missing Neighbor” dengan cepat.
Alarm dan software post-processing mengidentifikasi masalah jaringan.
Sebagai contoh, window untuk MS dapat mengukur persentase FER atau panggilan
terputus. FER yang tinggi dapat menyebabkan pelanggan mengalamai panggilan yang
terputus atau kualitas suara yang buruk. MS dapat mengukur pilot aktif dan neighbor,
sebgaimana ditunjukkan pada gambar, tetapi ini tidak tidak cukup untuk mencari lokasi
dari sumber masalah. Sebaliknya, receiver dapat mengukur seluruh pilot, dan
mengindikasikan bahwa PN 129 yang memiliki daya paling tinggi adalah tidak terdaftar
pada neighbor list MS. Oleh karena itu, missing neighbor ini dapat menyebabkan
interferensi yang besar pada MS, selanjutnya dapat menyebabkan seringnya panggilan
terputus dan FER tinggi. Dalam kasus ini, missing neighbor menjadi pilot yang paling
tinggi dayanya. Hal ini tidak dapat diidentifikasi hanya menggunakan MS.
Menggunakan solusi drivetest terintegrasi ini dapat mempercepat engineer
menyelesaikan masalah. Dengan tambahan alarm otomatis, pencarian sumber masalah
dapat dipermudah dan dipercepat. Pada akhirnya, pemrosesan data yang telah

23
dikumpulkan memungkinkan engineer mencari sumber masalah berdasarkan lokasi user
di peta.
5. Kesimpulan Sistem drivetest membantu operator dan vendor dalam mengoptimalkan performa
jaringannya. Dengan melakukan pengukuran berbasis MS dan receiver, hasil pengukuran
dapat menjelaskan apa dan kenapa suatu masalah bisa terjadi. Dengan demikian, dapat
membantu mengurangi waktu, tenaga, biaya yang dibutuhkan untuk melakukan optimasi
jairngan.