Motor Kapasitor 1
82
BAB I MOTOR SATU FASA 1.1 Pendahuluan Motor-motor satu fasa adalah motor berukuran kecil, yang dibuat dalam kisaran daya pecahan daya kuda (fractional horse power). Motor–motor ini digunakan untuk berbagai tipe (macam) peralatan dalam rumah tangga, kantor, toko, dan pabrik (industri). Motor–motor ini mempunyai konstruksi yang relatif sederhana. Motor satu fasa terdiri dari tiga tipe, yaitu : 1. Motor induksi satu fasa. Kebanyakan dari motor pecahan daya kuda adalah tipe motor ini. Motor-motor ini diklasifikasikan menurut metode yang digunakan untuk menstart mereka. Yaitu tipe split fasa (resistansi start motor), kapasitor start, kapasitor run, dan motor kutub bayangan. 2. Motor sinkron satu fasa. Motor ini berputar pada kecepatan putar yang tetap dan digunakan dalam aplikasi seperti jam dan meja putar 1
-
Upload
latasha-gonzalez -
Category
Documents
-
view
206 -
download
37
description
Contribute to Scribd to access this document.
Transcript of Motor Kapasitor 1
BAB I
MOTOR SATU FASA
1.1 Pendahuluan
Motor-motor satu fasa adalah motor berukuran kecil, yang dibuat dalam
kisaran daya pecahan daya kuda (fractional horse power). Motor–motor ini
digunakan untuk berbagai tipe (macam) peralatan dalam rumah tangga, kantor,
toko, dan pabrik (industri). Motor–motor ini mempunyai konstruksi yang relatif
sederhana.
Motor satu fasa terdiri dari tiga tipe, yaitu :
1. Motor induksi satu fasa.
Kebanyakan dari motor pecahan daya kuda adalah tipe motor ini. Motor-
motor ini diklasifikasikan menurut metode yang digunakan untuk menstart
mereka. Yaitu tipe split fasa (resistansi start motor), kapasitor start,
kapasitor run, dan motor kutub bayangan.
2. Motor sinkron satu fasa.
Motor ini berputar pada kecepatan putar yang tetap dan digunakan dalam
aplikasi seperti jam dan meja putar dimana kecepatan putar yang konstan
sangat dibutuhkan. Motor ini terdiri dari dua tipe, yaitu motor reluktansi dan
motor hysteresis.
3. Motor universal (motor satu fasa seri)
Motor tipe ini adalah motor seri satu fasa yang dapat dicatu oleh tegangan
searah maupun tegangan bolak-balik. Motor ini menyediakan torsi yang
tinggi dan dapat beroperasi pada kecepatan tinggi.
1
1.2 Motor Induksi Satu FasaDari segi konstruksi motor induksi satu fasa mirip dengan motor induksi
tiga fasa.
Perbedaannya hanya terletak pada:
1. Statornya hanya mempunyai belitan satu fasa
2. Pada beberapa jenis atau tipe dari motor ini digunakan saklar sentrifugal
untuk memutuskan kumparan bantu yang hanya digunakan untuk tujuan
starting.
Motor yang masuk ke dalam kategori motor induksi satu fasa adalah motor
fasa belah dan motor kapasitor. Motor ini mempunyai belitan terdistribusi pada
statornya dan rotornya adalah rotor sangkar. Jika tegangan disuplai pada kumparan
statornya maka kumparan stator tersebut akan menginduksi fluks magnet yang
hanya berubah sepanjang satu sumbu ruang. Medan magnet ini bukan merupakan
medan putar, seperti halnya pada motor 2 ataa 3 fasa. Dalam hal ini, fluks pulsasi
yang bekerja pada satu rotor sangkar yang diam (stationer) tidak akan
menghasilkan putaran. HaI inilah yang menyebabkan motor satu fasa tidak dapat
starting sendiri. HaI ini dapat diterangkan sebagai berikut. Bila keadaan fluks
sebagai fungsi waktu adalah
∅=∅m cosωt
Maka fluks sebagai fungsi waktu dan ruang adalah:
∅=∅m cosωt cosθ
dimana
2
ωt=kecepatan
θ=sudut ruang
atau
∅=1/2∅mcos (θ−ωt ¿)+1/2∅mcos (θ+ωt¿)¿¿
Dengan demikian dapat ditarik kesimpulan bahwa sebenarnya fluks yang
dihasilkan oleh kumparan fasa tunggal merupakan fluks dengan dua komponen,
yaitu komponen fluks arah maju 1/2∅m cos (θ−ωt¿)¿ dan fluks arah mundur
1/2∅m cos (θ+ωt ¿)¿. Kedua komponen fluks tersebut bergerak berlawanan arah
dengan kecepatan sudut (ωt) yang sama sehingga kedudukannya terhadap ruang
seolah-olah tetap. Kedua komponen fluks yang berlawanan arah tersebut tentunya
akan menghasilkan torsi yang sama besar dan berlawanan arah pula (arah maju
dan mundur) seperti terlihat pada Gambar 1.1.
Gambar 1. 1 Torsi Maju dan Torsi Mundur
Torsi resultan yang dihasilkan oleh kedua komponen torsi tersebut pada
dasarnya mempunyai kemarnpuan untuk rnenggerakkan rnotor dengan arah maju
3
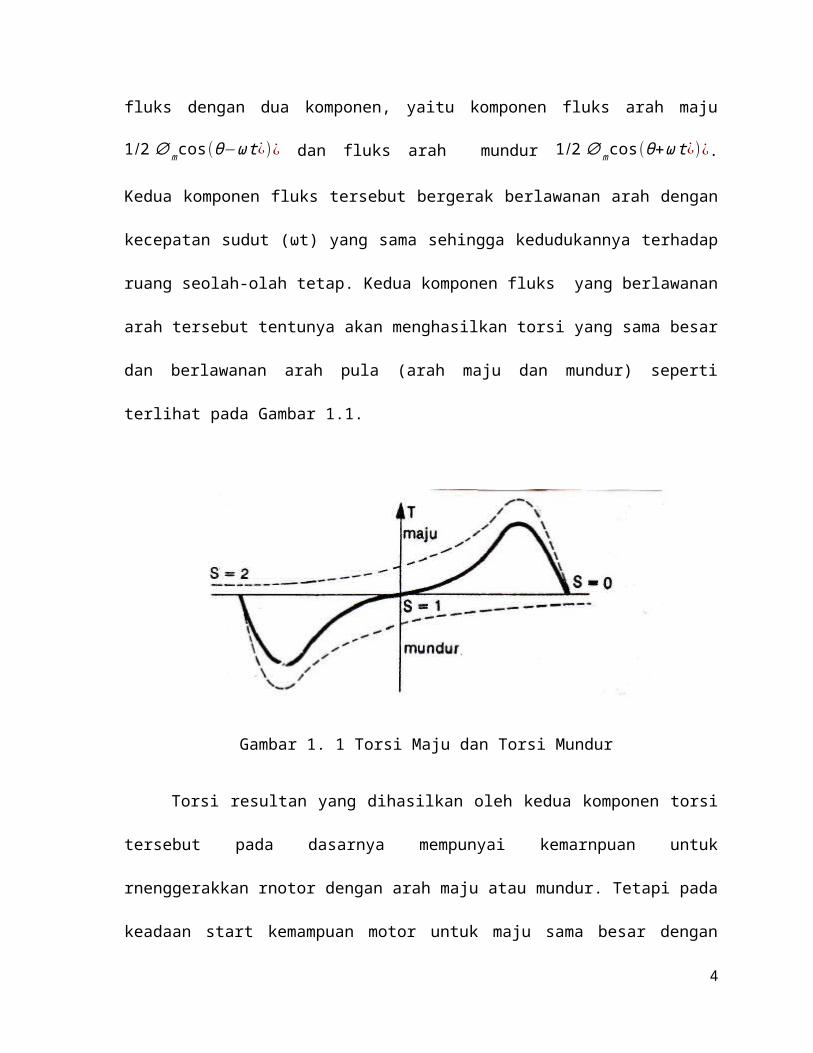
atau mundur. Tetapi pada keadaan start kemampuan motor untuk maju sama besar
dengan kemampuan gerak mundurnya oleh sebab itu motor tetap saja diam.
Motor induksi satu fasa mempunyai rotor dengan tipe sangkar tupai dan
belitan stator tipe distribusi. Gambar 1.2 memperlihatkan diagram skematik dari
motor induksi satu fasa. Motor ini tidak dapat mengembangkan torsi starting dan
karenanya tidak mampu untuk mulai berputar dengan sendirinya jika belitan
statornya dihubungkan ke sumber tegangan bolak-balik. Namun, jika rotor diputar
oleh sebuah alat bantu, maka rotor akan terus berputar.
1.2.1 Teori Medan Berputar Ganda
Operasi dari motor induksi satu fasa dapat dijelaskan dan dianalisa dengan
teori medan berputar ganda.
Rotor Diam (Standstill)
Pertama-tama pertimbangkan rotor dalam keadaan diam dan belitan stator
dihubungkan ke sebuah sumber tegangan bolak-balik satu fasa. Sebuah gaya
gerak magnet pulsasi, karenanya sebuah fluks pulsasi ФS , ,seperti ditunjukkan oleh
Gambar 1.2 (b) terbentuk di dalam mesin sepanjang sumbu dari beiltan stator.
Fluks stator pulsasi ini menginduksikan arus melalui aksi transformator ke dalam
rangkaian rotor, yang selanjutnya menghasilkan sebuah fluks pulsasi Фr , yang
bergerak sepanjang sumbu yang sama dengan fluks stator ФS. Dengan
menggunakan Hukum Lenz, kedua fluks ini cenderung untuk berlawanan satu
sama lain. Ketika sudut antara kedua fluks ini nol, tidak ada torsi starting yang
dikembangkan.
4
Rotor Berputar
Sekarang anggap bahwa rotor sedang berputar.Hal ini dapat dilakukan
dengan memutar rotor dengan tangan atau dengan menggunakan rangkaian
bantu. Motor induksi satu fasa ini dapat menghasilkan torsi ketika ia dalam
keadaan berputar, yang dapat dijelaskan sebagai berikut:
Gambar 1. 2 Motor satu fasa, (a) Gambar skematik, (b) Fluks-fluks stator dan rotor
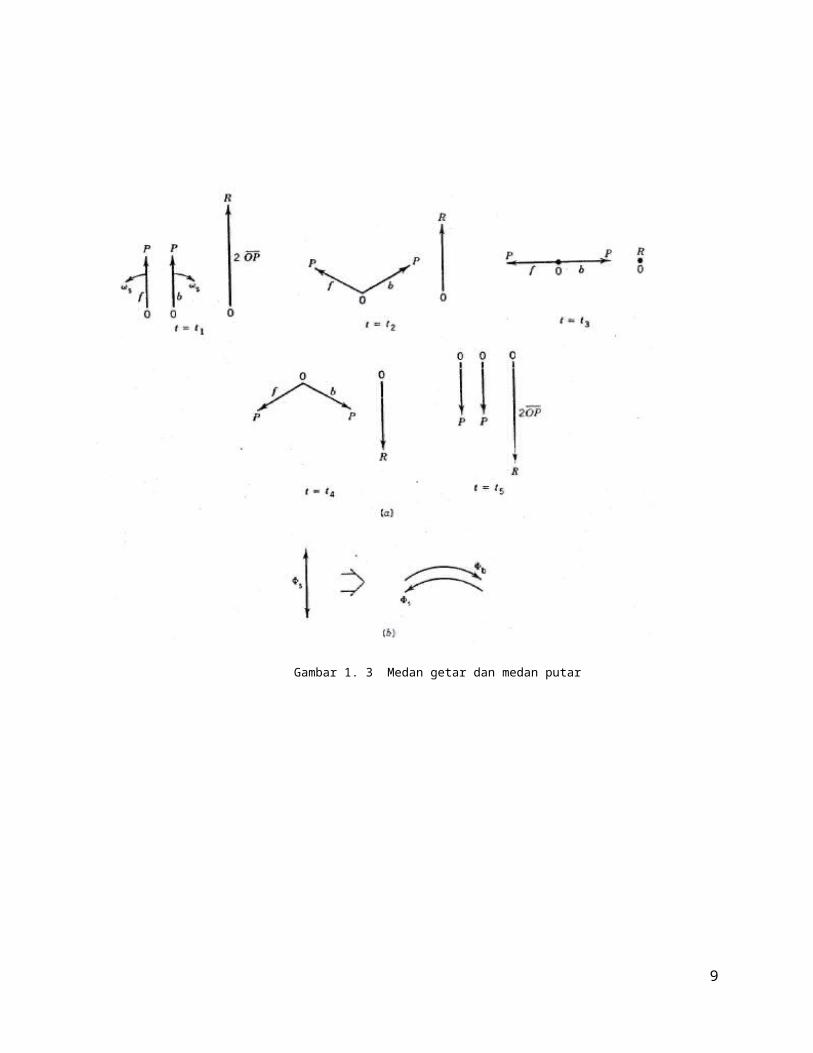
Sebuah medan pulsasi (gaya gerak magnet atau fluks) adalah ekivalen
dengan dua buah medan berputar dari setengah magnitude tetapi berputar pada
kecepatan sinkron (serempak) dalam arah yang berlawanan. Hal ini dapat
dibuktikan secara analitis atau secara grafik. Pertimbangkan dua vektor dengan
magnitude yang sama OP, f bergerak maju berlawanan dengan arah jarum
jam, dan b bergerak mundur searah dengan arah jarum jam. Kedua vektor ini
berotasi pada kecepatan yang sama dalam arah yang berlawanan. Jumlah
mereka (kedua vektor ini) OR magnitudenya berganti-ganti antara +2 OP dan -2
OP dan selalu terletak sepanjang garis lurus yang sama. Lebih lanjut, OR adalah
5
sebuah fungsi sinus dari waktu jika vektor-vektor tersebut berotasi pada kecepatan
konstan yang sama. Sehingga, medan pulsasi (direpresentasikan oleh OR) yang
dihasilkan oleh arus dalam belitan stator bisa dipandang sebagai resultan dari dua
medan yang berputar (yang diwakili oleh f dan b) dari magnitude yang sama tetapi
berotasi dalam arah yang berbeda. Fluks pulsasi stator ФS, yang bergetar
sepanjang sumbu dari belitan stator adalah ekivalen dengan dua fluks yang
berputar Фf dan Фb seperti ditunjukan oleh Gambar 1. 2 (b).
Secara matematik, untuk sebuah belitan stator yang terdistribusi secara
sinusoidal, gaya gerak magnet sepanjang sebuah posisi θ seperti yang
ditunjukkan oleh Gambar 1. 3 adalah:
F (θ )=N icosθ
Dimana N adalah jumlah efektif dari belitan stator.
6

Gambar 1. 3 Medan getar dan medan putar
Gambar 1. 4 Potongan melintang dari sebuah motor induksi satu fasa
7
Jika i = Imaks cos ωt, sehingga,
F (θ, t) = N Imax cos θ cos ωt
¿N I maks
2cos (¿ωt−θ)+
N Imaks
2cos (ωt+θ)¿
= F f +Fb
Dimana Ff merepresentasikan sebuah gaya gerak magnet yang berotasi
dalam arah θ, dan Fb merepresentasikan sebuah gaya gerak magnet dalam arah
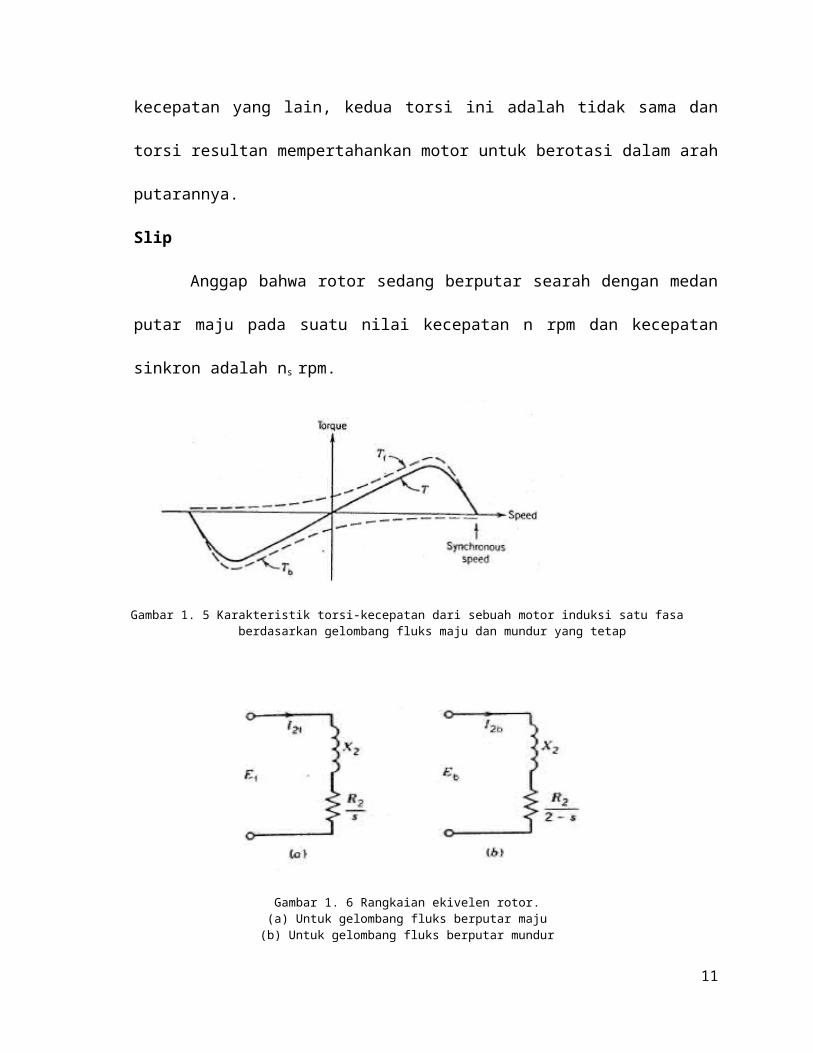
yang berlawanan. Komponen-komponen torsi ini dan torsi resultan diperlihatkan
pada Gambar 1. 5. Pada keadaan diam, kedua torsi ini, torsi maju dan torsi
mundur, adalah sama dalam magnitude dan karena itu resultan torsi starting
tersebut adalah nol. Pada nilai kecepatan yang lain, kedua torsi ini adalah tidak
sama dan torsi resultan mempertahankan motor untuk berotasi dalam arah
putarannya.
Slip
Anggap bahwa rotor sedang berputar searah dengan medan putar maju
pada suatu nilai kecepatan n rpm dan kecepatan sinkron adalah ns rpm.
Gambar 1. 5 Karakteristik torsi-kecepatan dari sebuah motor induksi satu fasa berdasarkan gelombang fluks maju dan mundur yang tetap
8
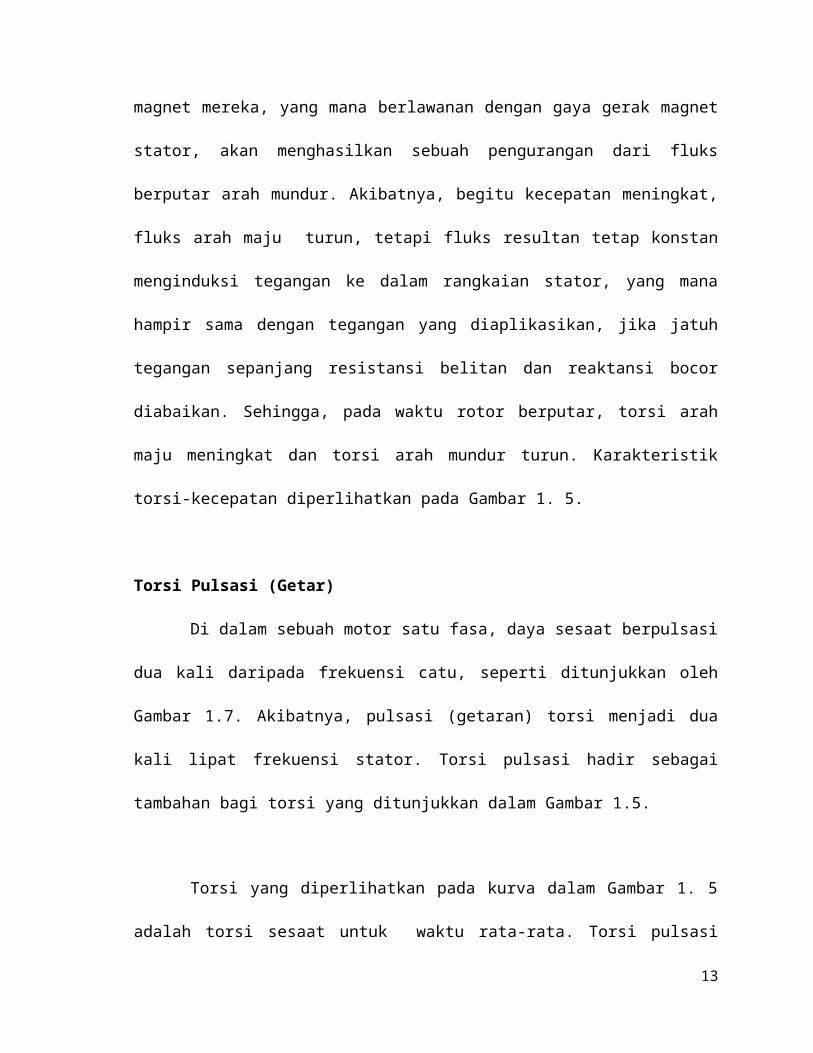
Gambar 1. 6 Rangkaian ekivelen rotor.(a) Untuk gelombang fluks berputar maju
(b) Untuk gelombang fluks berputar mundur
Slip terhadap medan putar maju adalah :
sf =ns−¿ n
ns=s¿
Rotor berputar berlawanan dengan putaran medan putar mundur, sehingga slip
terhadap medan putar mundur adalah
sb=ns−¿ (−n)
ns=
ns+nns
¿
¿2ns−ns+n
ns=2−s
Rangkaian rotor untuk fluks putar arah maju dan arah mundur ditunjukkan
dalam Gambar 1. 6. Pada saat diam, impedansi adalah sama demikian juga
arusnya (I2f = I2b). Gaya gerak magnet yang dihasilkan rangkaian rotor ini baik
arah maju dan arah mundur mempengaruhi dengan nilai yang sama (dalam arah
yang berlawanan) gaya gerak magnet rangkaian stator, sehingga fluks putar
dalam arah maju dan mundur dalam celah udara adalah sama besar. Namun,
ketika rotor berputar, impedansi-impedansi dari rangkaian rotor menjadi tidak
sama dan arus rotor I2b lebih tinggi (dan juga pada sebuah faktor daya yang lebih
9

rendah) daripada arus rotor I2f . Gaya gerak magnet mereka, yang mana
berlawanan dengan gaya gerak magnet stator, akan menghasilkan sebuah
pengurangan dari fluks berputar arah mundur. Akibatnya, begitu kecepatan
meningkat, fluks arah maju turun, tetapi fluks resultan tetap konstan menginduksi
tegangan ke dalam rangkaian stator, yang mana hampir sama dengan tegangan
yang diaplikasikan, jika jatuh tegangan sepanjang resistansi belitan dan reaktansi
bocor diabaikan. Sehingga, pada waktu rotor berputar, torsi arah maju meningkat
dan torsi arah mundur turun. Karakteristik torsi-kecepatan diperlihatkan pada
Gambar 1. 5.
Torsi Pulsasi (Getar)
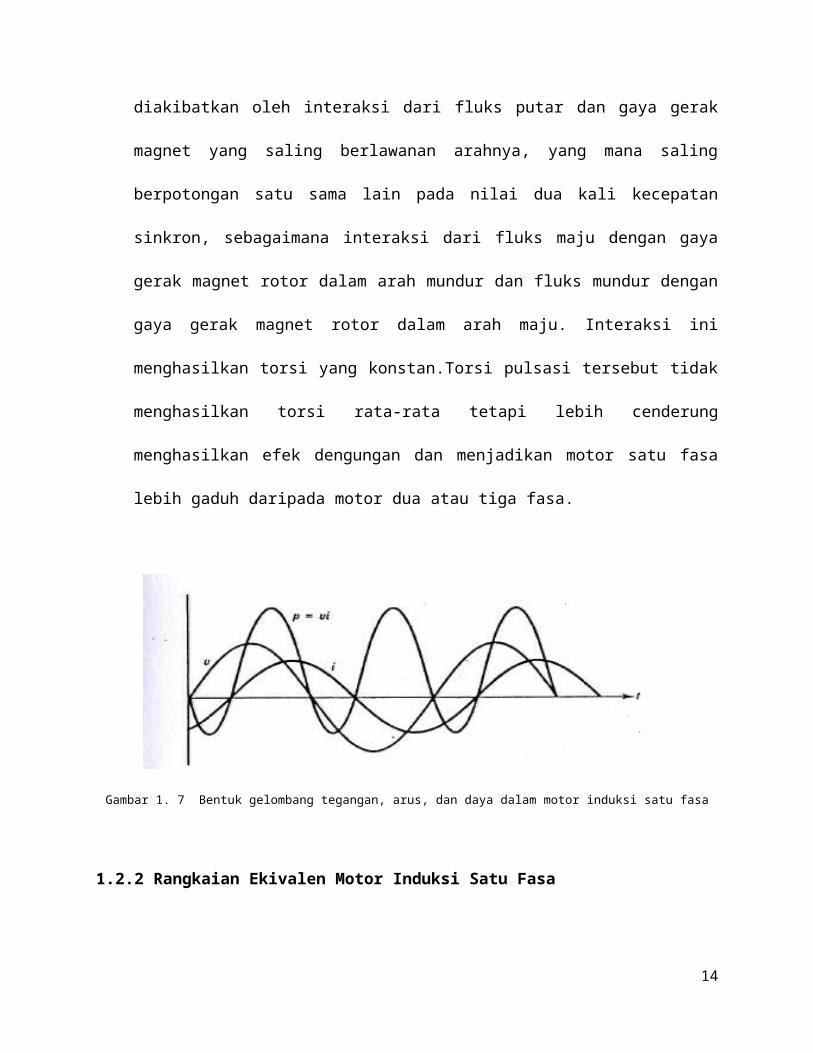
Di dalam sebuah motor satu fasa, daya sesaat berpulsasi dua kali
daripada frekuensi catu, seperti ditunjukkan oleh Gambar 1.7. Akibatnya, pulsasi
(getaran) torsi menjadi dua kali lipat frekuensi stator. Torsi pulsasi hadir sebagai
tambahan bagi torsi yang ditunjukkan dalam Gambar 1.5.
Torsi yang diperlihatkan pada kurva dalam Gambar 1. 5 adalah torsi
sesaat untuk waktu rata-rata. Torsi pulsasi diakibatkan oleh interaksi dari fluks
putar dan gaya gerak magnet yang saling berlawanan arahnya, yang mana saling
berpotongan satu sama lain pada nilai dua kali kecepatan sinkron, sebagaimana
interaksi dari fluks maju dengan gaya gerak magnet rotor dalam arah mundur dan
fluks mundur dengan gaya gerak magnet rotor dalam arah maju. Interaksi ini
menghasilkan torsi yang konstan.Torsi pulsasi tersebut tidak menghasilkan torsi
10
rata-rata tetapi lebih cenderung menghasilkan efek dengungan dan menjadikan
motor satu fasa lebih gaduh daripada motor dua atau tiga fasa.
Gambar 1. 7 Bentuk gelombang tegangan, arus, dan daya dalam motor induksi satu fasa
1.2.2 Rangkaian Ekivalen Motor Induksi Satu Fasa
Ketika stator dari motor induksi satu fasa dihubungkan ke catu daya, arus
stator menghasilkan sebuah gaya gerak magnet pulsasi yang ekivalen dengan
dua gelombang ggm dengan amplituda yang berputar dalam arah yang saling
berlawanan pada kecepatan sinkron. Setiap gelombang berputar ini
menginduksikan arus dalam rangkaian rotor dan menghasilkan aksi motor induksi
yang mirip terjadi dalam sebuah motor induksi fasa banyak. Teori medan putar
ganda ini dapat digunakan bagi analisis untuk menilai performansi kualitatif dan
kuantitatif dari motor induksi satu fasa.
Tinjau kondisi ketika motor diam dan belitan stator dieksitasitasi dari
sebuah suplai satu fasa. Hal ini ekivalen dengan sebuah transformator dengan
rangkaian sekunder terhubungsingkat. Rangkaian ekivalen motor induksi satu fasa
diperlihatkan pada Gambar 1.8 (a).
11

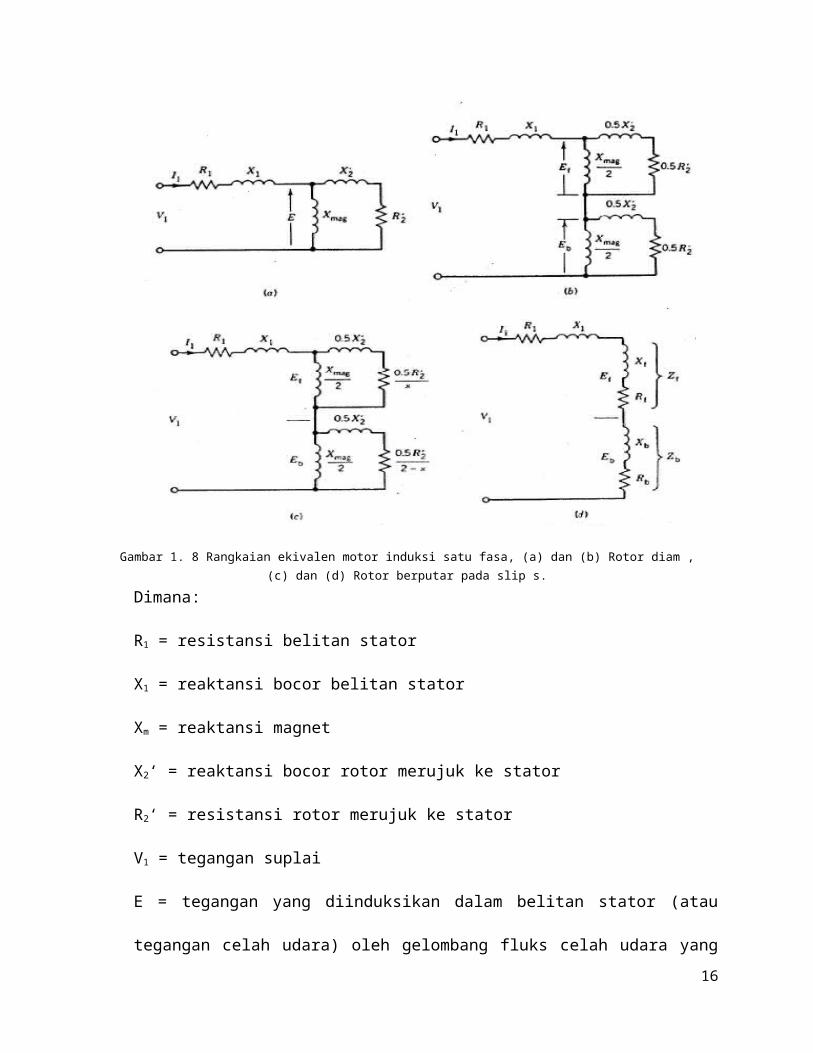
Gambar 1. 8 Rangkaian ekivalen motor induksi satu fasa, (a) dan (b) Rotor diam ,(c) dan (d) Rotor berputar pada slip s.
Dimana:
R1 = resistansi belitan stator
X1 = reaktansi bocor belitan stator
Xm = reaktansi magnet
X2‘ = reaktansi bocor rotor merujuk ke stator
R2‘ = resistansi rotor merujuk ke stator
V1 = tegangan suplai
E = tegangan yang diinduksikan dalam belitan stator (atau tegangan celah udara)
oleh gelombang fluks celah udara yang berpulsasi stasioner yang dihasilkan oleh
efek gabungan arus stator dan arus rotor
12
Dan E = 4,44 f N Ф
Dimana Ф adalah fluks celah udara.
Menurut teori medan putar ganda, rangkaian ekivalen motor induksi satu
fasa dapat dipecah menjadi dua bagian, seperti ditunjukkan dalam Gambar 1. 8 b,
yang merepresentasikan efek dari medan maju dan medan mundur.
Ef = 4,44 f N Фf
Eb = 4,44 f N Фb
Pada saat diam, Фf = Фb (fluks-fluks ini yang menjadi fluks-fluks celah
udara berputar), Ef = Eb. Sekarang, tinjau motor berputar pada suatu nilai
kecepatan dalam arah medan putar maju, dengan slip s. Arus rotor yang
diinduksikan oleh medan maju mempunyai frekuensi sf, dimana f adalah frekuensi
stator. Seperti halnya motor fasa banyak, ggm rotor berputar pada rpm slip
teehadap rotor tetapi rpm sinkron terhadap stator. Resultan ggm stator maju dan
ggm rotor menghasilkan fluks celah udara maju yang menginduksikan tegangan
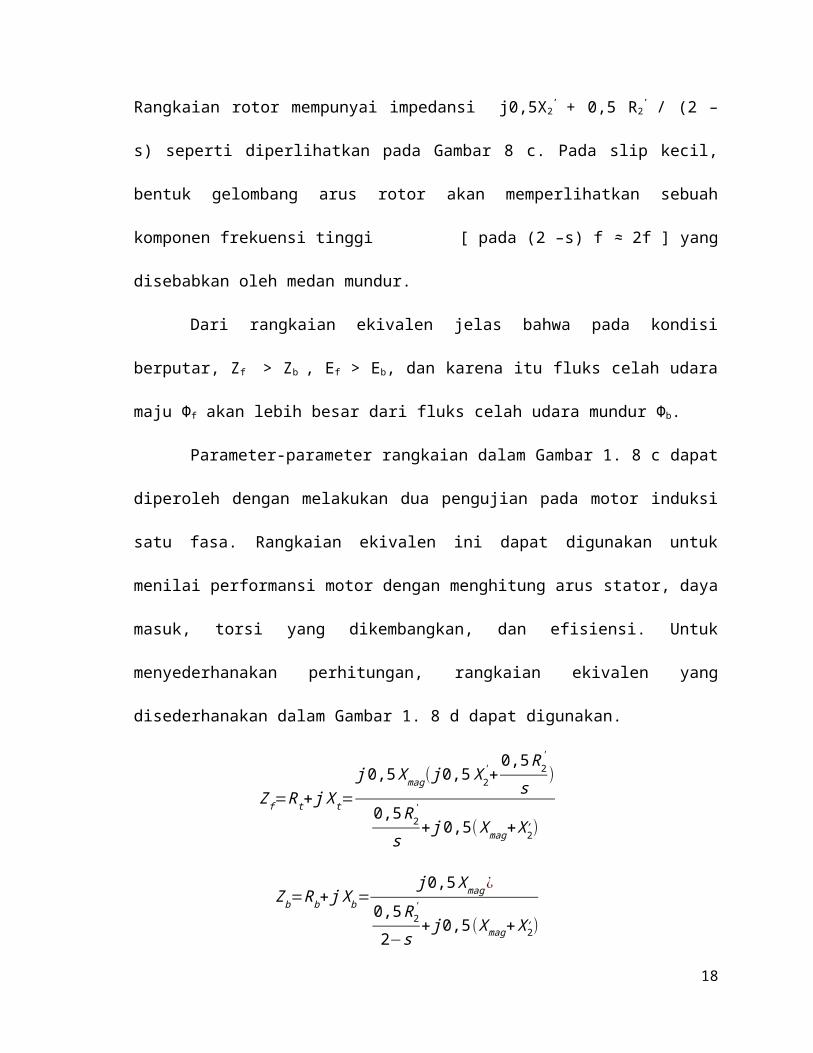
Ef. Rangkaian rotor mempunyai impedansi j0,5X2’ + 0,5 R2
’ / (2 – s) seperti
diperlihatkan pada Gambar 8 c. Pada slip kecil, bentuk gelombang arus rotor akan
memperlihatkan sebuah komponen frekuensi tinggi [ pada (2 –s) f ≈ 2f ] yang
disebabkan oleh medan mundur.
Dari rangkaian ekivalen jelas bahwa pada kondisi berputar, Z f > Zb , Ef >
Eb, dan karena itu fluks celah udara maju Фf akan lebih besar dari fluks celah
udara mundur Фb.
13
Parameter-parameter rangkaian dalam Gambar 1. 8 c dapat diperoleh
dengan melakukan dua pengujian pada motor induksi satu fasa. Rangkaian
ekivalen ini dapat digunakan untuk menilai performansi motor dengan menghitung
arus stator, daya masuk, torsi yang dikembangkan, dan efisiensi. Untuk
menyederhanakan perhitungan, rangkaian ekivalen yang disederhanakan dalam
Gambar 1. 8 d dapat digunakan.
Z f=R t+ j X t=j 0,5 Xmag( j 0,5 X2
' +0,5 R2
'
s)
0,5 R2'
s+ j 0,5(Xmag+X 2
, )
Zb=Rb+ j X b=j 0,5 Xmag ¿
0,5 R2'
2−s+ j 0,5(X mag+ X2
, )
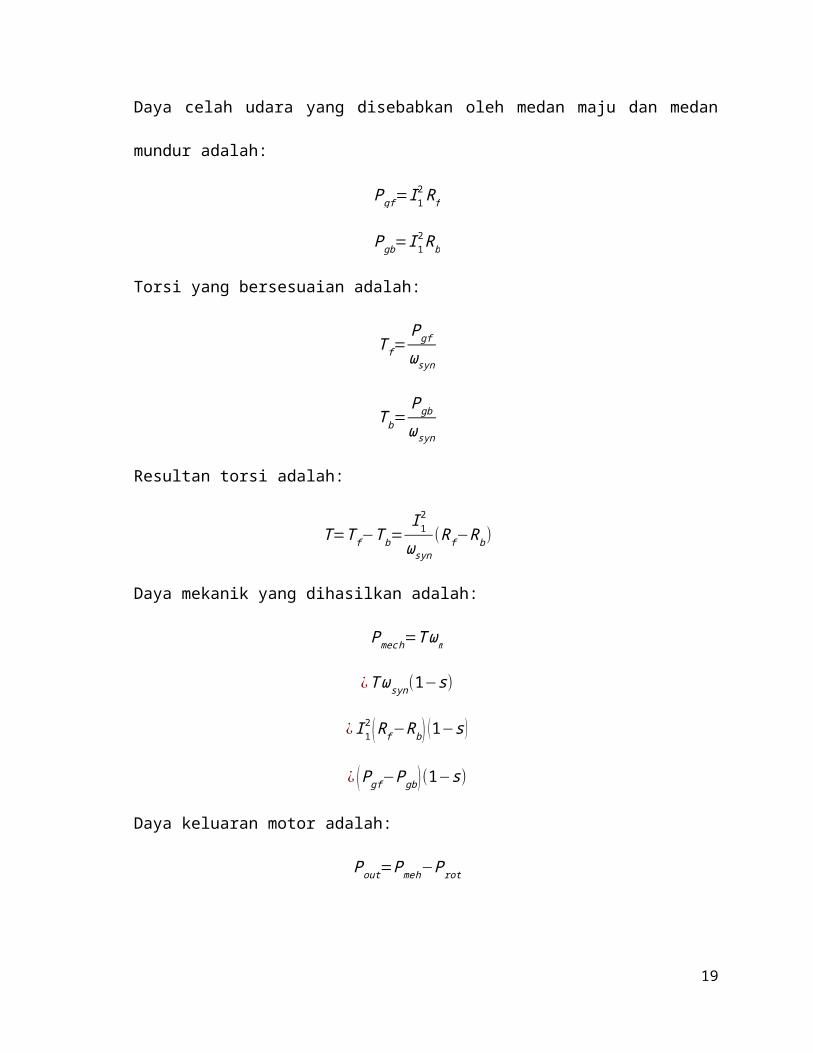
Daya celah udara yang disebabkan oleh medan maju dan medan mundur adalah:
Pgf =I 12 Rf
Pgb=I12 Rb
Torsi yang bersesuaian adalah:
T f =Pgf
ωsyn
T b=Pgb
ωsyn
Resultan torsi adalah:
T=T f −Tb=I 1
2
ωsyn(R f−Rb)
Daya mekanik yang dihasilkan adalah:
Pmec h=T ωm
14
¿T ωsyn(1−s)
¿ I 12 ( R f−Rb ) (1−s )
¿ ( Pgf−Pgb) (1−s)
Daya keluaran motor adalah:
Pout=Pmeh−P rot
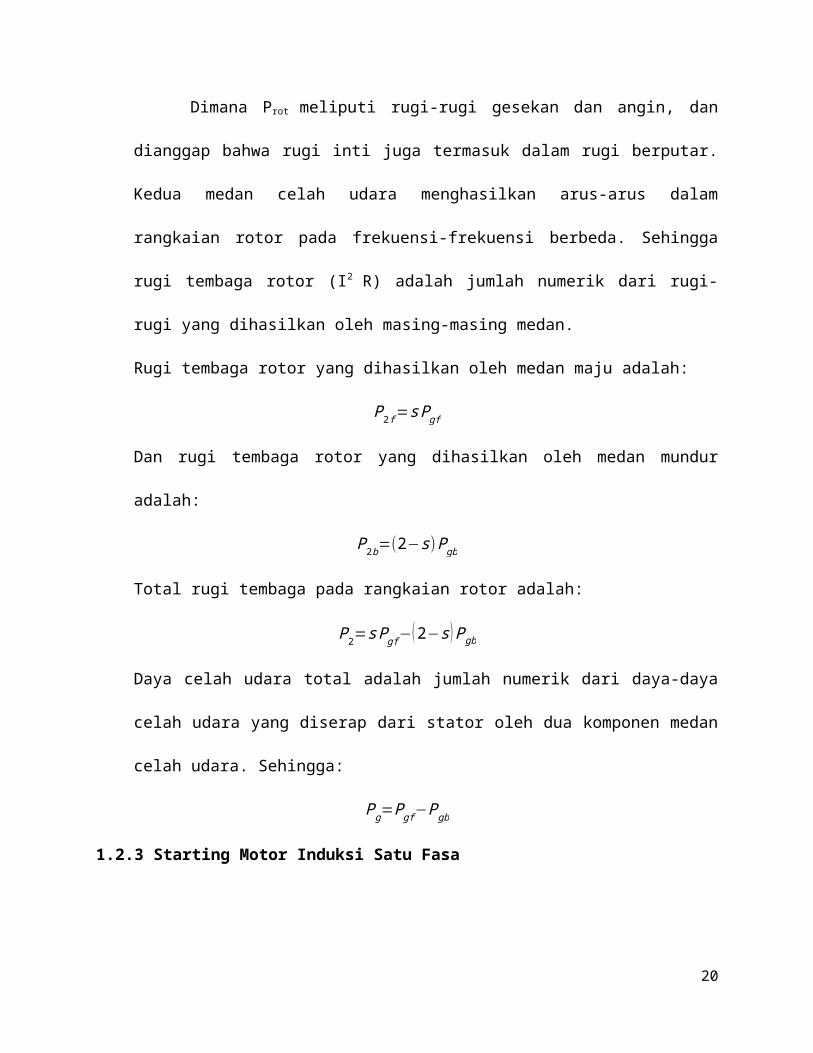
Dimana Prot meliputi rugi-rugi gesekan dan angin, dan dianggap bahwa
rugi inti juga termasuk dalam rugi berputar. Kedua medan celah udara
menghasilkan arus-arus dalam rangkaian rotor pada frekuensi-frekuensi berbeda.
Sehingga rugi tembaga rotor (I2 R) adalah jumlah numerik dari rugi-rugi yang
dihasilkan oleh masing-masing medan.
Rugi tembaga rotor yang dihasilkan oleh medan maju adalah:
P2 f =s Pgf
Dan rugi tembaga rotor yang dihasilkan oleh medan mundur adalah:
P2 b=(2−s)Pgb
Total rugi tembaga pada rangkaian rotor adalah:
P2=s Pgf −(2−s ) Pgb
Daya celah udara total adalah jumlah numerik dari daya-daya celah udara yang
diserap dari stator oleh dua komponen medan celah udara. Sehingga:
Pg=Pgf −Pgb
1.2.3 Starting Motor Induksi Satu Fasa
Ada 2 cara yang digrrnakan agar motor induksi satu fasa dapat starting, yaitu:
15
1. Pemberian momen awal dengan tangan atau peralatan lain pada rotor dari
motor (memutar rotor dari motor dengan tangan).
Pada rotor akan timbul fluks dan fluks ini akan berinteraksi dengan fluks
yang dihasilkan pada kumparan satu fasa pada stator. Selanjutnya resultan
dari kedua fluks tersebut menghasilkan medan putar yang selanjutnya
memungkinkan motor tersebut berputar.
2. Memasang kumparan bantu pada stator
Motor induksi satu fasa tidak dapat starting sendiri. Oleh karena itu, secara
temporer motor ini dirubah menjadi motor dua fasa, yaitu selama periode
starting.
Untuk itu. stator motor tersebut dilengkapi dengan kumparan bantu atau
kumparan starting yang terhubung secara paralel dengan kumparan utama.
Kedua kumparan ini terpisah 900 listrik yang satu dengan yang lain dan disusun
sedemikian sehingga perbedaan fasa arus dalam kedua kumparan cukup besar
(idealnya 90O), sehingga motor tersebut pada saat starting menyerupai motor dua
fasa. Resultan arus yang dihasilkan kedua kumparan menghasilkan fluks yang
dapat rnernbangkitkan medan putar sehingga motor ini dapat starting sendiri.
Berdasarkan metode untuk mernperoleh perbedaan fasa antara arus pada
kedua kumparan tersebut, terdapat dua tipe motor satu fasa yang dapat
dihasilkan. :
1. Motor fasa belah, diperoleh dengan cara membuat kumparan bantunya
mempunyai impedansi yang berbeda dengan kumparan utarnanya
16

Akibat adanya perbedaan impedansi (R dan L) antara kedua kumparan
tersebut, maka arus kedua kumparan tersebut akan berbeda fasa.
2. Motor kapasitor, pada kumparan bantunya dipasang sebuah kapasitor
secara seri dengan kumparan tersebut.
Adanya kapasitor pada kumparan bantu menyebabkan timbulnya
perbedaan fasa antara arus pada kumparan utama dan arus pada
kumparan bantu. Kapasitor ini biasanya tipe elektrolit dan dipasang pada
bagian luar dari motor.
1.3 Klasifikasi Motor Induksi Satu Fasa
1.3.1 Motor Fasa Belah (Split Fasa Motor)
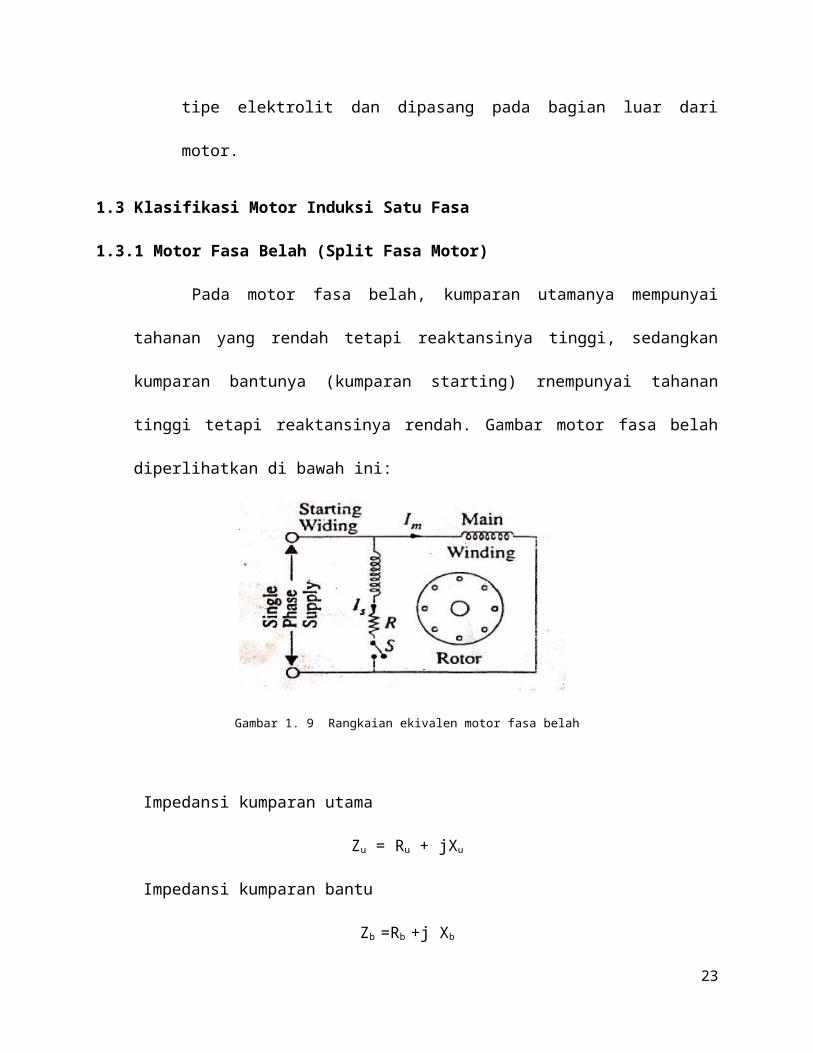
Pada motor fasa belah, kumparan utamanya mempunyai tahanan yang
rendah tetapi reaktansinya tinggi, sedangkan kumparan bantunya (kumparan
starting) rnempunyai tahanan tinggi tetapi reaktansinya rendah. Gambar motor
fasa belah diperlihatkan di bawah ini:
Gambar 1. 9 Rangkaian ekivalen motor fasa belah
Impedansi kumparan utama
Zu = Ru + jXu
17
Impedansi kumparan bantu
Zb =Rb +j Xb
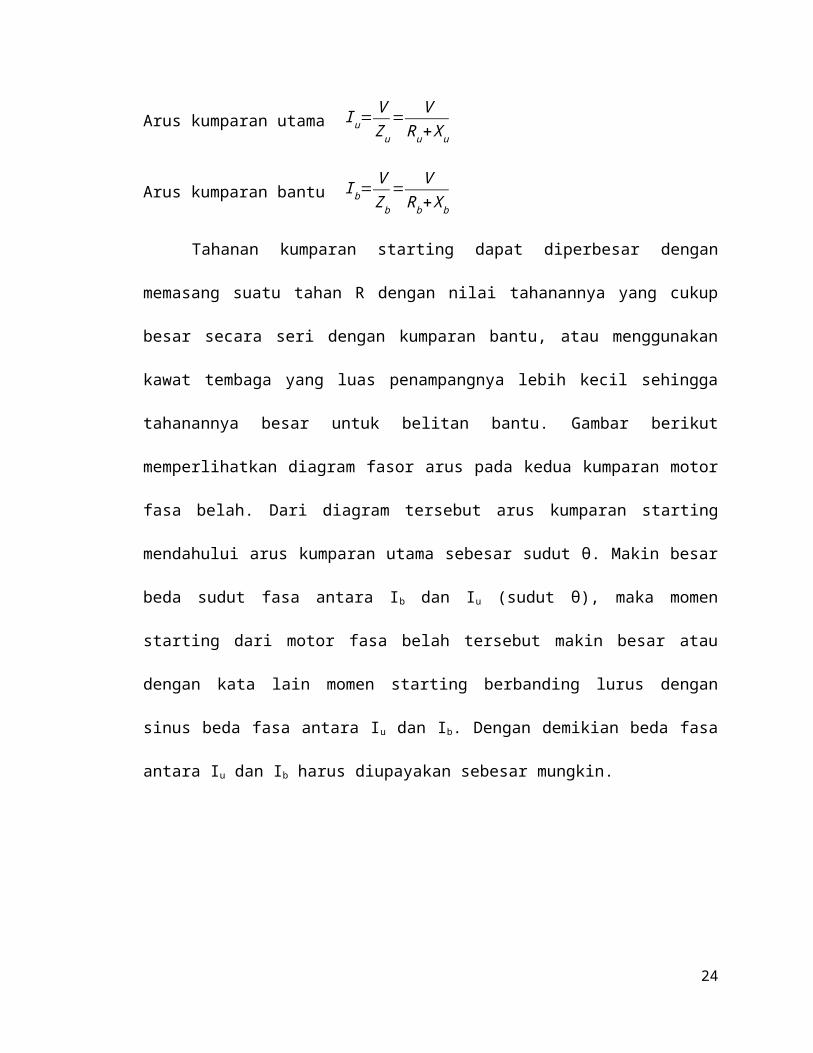
Arus kumparan utama I u=VZu
= VRu+ Xu
Arus kumparan bantu I b=VZb
= VRb+X b
Tahanan kumparan starting dapat diperbesar dengan memasang suatu
tahan R dengan nilai tahanannya yang cukup besar secara seri dengan
kumparan bantu, atau menggunakan kawat tembaga yang luas penampangnya
lebih kecil sehingga tahanannya besar untuk belitan bantu. Gambar berikut
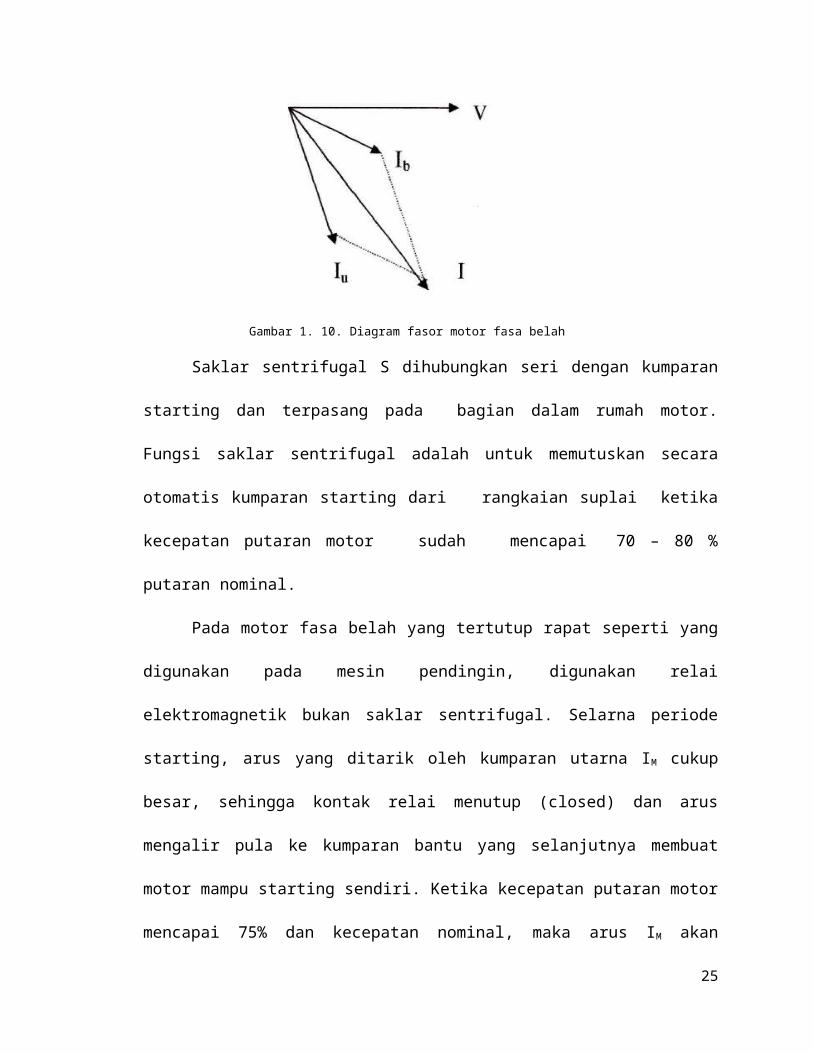
memperlihatkan diagram fasor arus pada kedua kumparan motor fasa belah.
Dari diagram tersebut arus kumparan starting mendahului arus kumparan utama
sebesar sudut θ. Makin besar beda sudut fasa antara Ib dan Iu (sudut θ), maka
momen starting dari motor fasa belah tersebut makin besar atau dengan kata lain
momen starting berbanding lurus dengan sinus beda fasa antara Iu dan Ib.
Dengan demikian beda fasa antara Iu dan Ib harus diupayakan sebesar mungkin.
Gambar 1. 10. Diagram fasor motor fasa belah
18
Saklar sentrifugal S dihubungkan seri dengan kumparan starting dan
terpasang pada bagian dalam rumah motor. Fungsi saklar sentrifugal adalah
untuk memutuskan secara otomatis kumparan starting dari rangkaian suplai
ketika kecepatan putaran motor sudah mencapai 70 – 80 % putaran
nominal.
Pada motor fasa belah yang tertutup rapat seperti yang digunakan pada
mesin pendingin, digunakan relai elektromagnetik bukan saklar sentrifugal.
Selarna periode starting, arus yang ditarik oleh kumparan utarna IM cukup besar,
sehingga kontak relai menutup (closed) dan arus mengalir pula ke kumparan
bantu yang selanjutnya membuat motor mampu starting sendiri. Ketika
kecepatan putaran motor mencapai 75% dan kecepatan nominal, maka arus IM
akan menurun sehingga tidak mampu lagi menarik tuas penutup kontak relai dan
kontak akan membuka memutuskan kumparan starting dari rangkaian suplai.
Gambar 1. 11 Motor fasa belah dengan relai arus
Penggunaan yang umum untuk motor jenis ini adalah untuk penggerak
pompa kipas, blower, mesin cuci dan sebagainya. Kapasitasnya antara 1/20
19
sampai dengan 1/3 HP, dengan rpm antara 865 sampai dengan 3450. Arah
putaran motor ini dapat dibalik dengan membalik salah satu ujung kumparan
stator. Kecepatan putaran bervariasi sekitar 2 sampai dengan 5% dan kondisi
tanpa beban dan kondisi beban penuh.
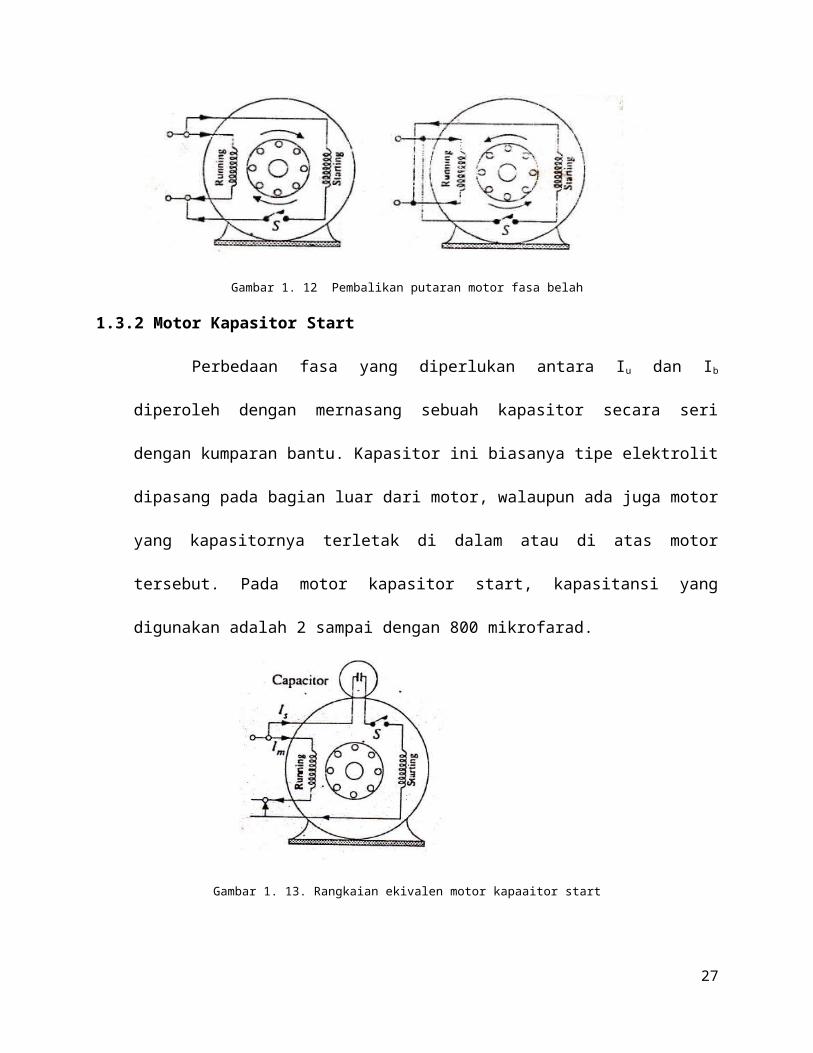
Gambar 1. 12 Pembalikan putaran motor fasa belah
1.3.2 Motor Kapasitor Start
Perbedaan fasa yang diperlukan antara Iu dan Ib diperoleh dengan
mernasang sebuah kapasitor secara seri dengan kumparan bantu. Kapasitor ini
biasanya tipe elektrolit dipasang pada bagian luar dari motor, walaupun ada juga
motor yang kapasitornya terletak di dalam atau di atas motor tersebut. Pada motor
kapasitor start, kapasitansi yang digunakan adalah 2 sampai dengan 800
mikrofarad.
Gambar 1. 13. Rangkaian ekivalen motor kapaaitor start
20
Kapasitor ini dirancang untuk penggunaan sesaat (short duty) dan
penggunaannya tidak boleh lebih dari 20 kali per jam dengan waktu tersambung
tidak lebih dari 3 detik. Penurunan nilai kapasitansi disebabkan oleh panas yang
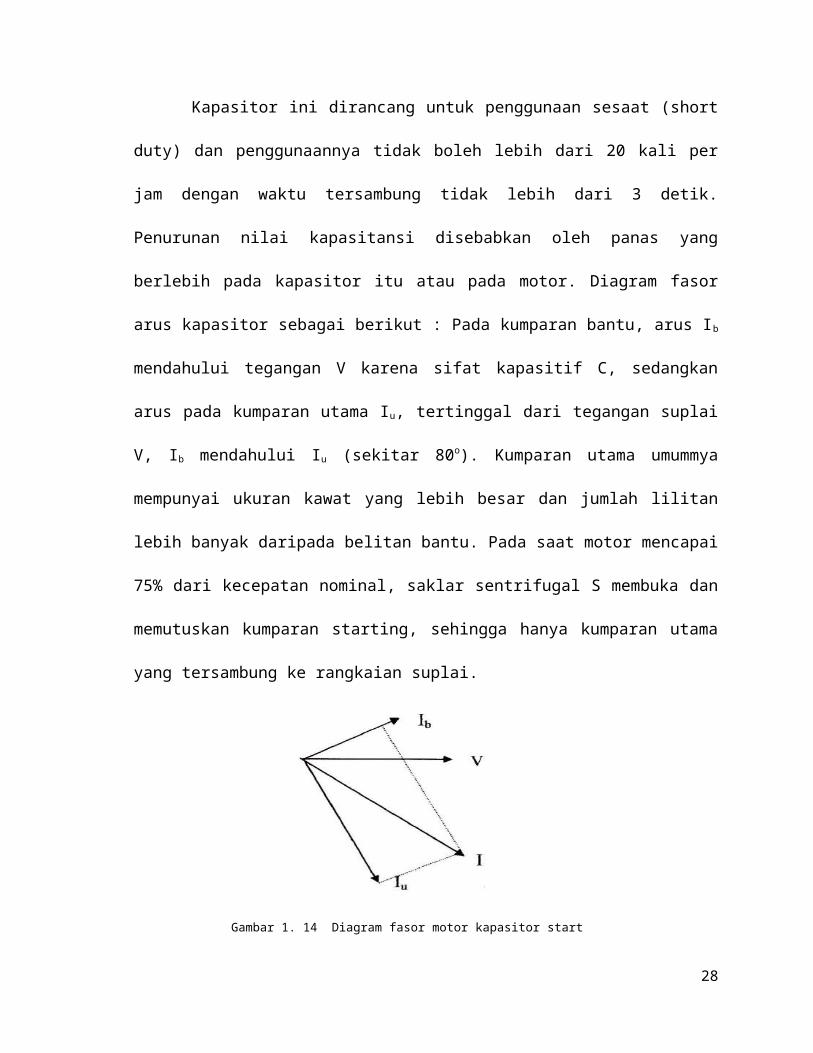
berlebih pada kapasitor itu atau pada motor. Diagram fasor arus kapasitor sebagai
berikut : Pada kumparan bantu, arus Ib mendahului tegangan V karena sifat
kapasitif C, sedangkan arus pada kumparan utama Iu, tertinggal dari tegangan
suplai V, Ib mendahului Iu (sekitar 80o). Kumparan utama umummya mempunyai
ukuran kawat yang lebih besar dan jumlah lilitan lebih banyak daripada belitan
bantu. Pada saat motor mencapai 75% dari kecepatan nominal, saklar sentrifugal
S membuka dan memutuskan kumparan starting, sehingga hanya kumparan
utama yang tersambung ke rangkaian suplai.
Gambar 1. 14 Diagram fasor motor kapasitor start
Torsi Starting Pada Motor Kapasitor Start
Sebuah motor kapasitor start menghasilkan torsi statis yang besarnya
sebanding dengan:
1) Sinus dari sudut pergeseran fasa antara kedua arus di kedua
2) kumparanPerkalian arus kumparan utama dan kumparan bantu.
21
3) Jumlah lilitan pada kumparan bantu.
Pada motor fasa belah sudut antara Iu dan Ib kecil (< 30o), sedangkan
pada motor kapasitor start sekitar 80o. Dengan demikian torsi starting yang
dihasilkan motor kapasitor lebih besar dari yang dihasilkan motor fasa belah.
Contoh perbandingan :
Pada motor fasa belah beda fasa antara arus kumparan utama dangan
arus kumparan bantu adalah 24.3o dan pada motor kapasitor start 80.8o. Carilah
berapa kali besarnya torsi starting motor kapasitor start dibandingkan motor fasa
belah.
Penyelesaian:
Sinus 24.3o = 0,4115; sinus 80.8o = 0,987
sehingga: sin 80,80
sin 24,3o =0,9870,4115
=¿ 2,4
Torsi starting motor kapasitor start tersebut 2,4 kali torsi starting motor fasa belah.
Contoh soal :
Suatu motor fasa tunggal dengan tipe kapasitor motor 113 hp, 120 volt, 60 cps,
mempunyai impedansi kumparan utama dan kumparan bantu sebagai berikut:
Kumparan utama Zu = 4,5 + j3,7 ohrn ,
Kumparan bantu Zb = 9,5 + j 3,5 ohm
Tentukan besarnya kapasitor yang diperlukan untuk menjalankan motor.
Penyelesaian
Sudut antara I dan Iu sama dengan sudut impedansi kumparan utamanya yaitu:
∅ u=arc tan 3,74,5
=39,6o
22
sedangkan sudut antara I dan Ib sama dengan sudut impedansi kumparan bantu
dan kapasitor: Jadi:
∅=39,6O−90O=arc tan3,5−XC
9,5
3,5−X C
9,5=tan (−50,4O )=−1,21
XC=1.21x 9,5+3,5=15 oh m
sehingga kapasitansi C adalah
C= 106
15 x 377=177 F
Beberapa Tipe Motor Kapasitor Start
1) Motor tegangan tunggal dengan pembalikan luar.
Pada motor ini kumparan bantu tersambung seri dengan kapasitor elektrolit
serta sebuah saklar sentrifugal. Pada motor ini terdapat empat ujung kawat
yang dikeluarkan dari rumah motor; dua ujung kumparan utama dan dua
ujung kumparan bantu. Arah putaran motor dapat dengan mudah dibalik
dengan mempertukarkan ujung-ujung kumparan bantu dan sambungan
kumparan utama di luar rumah motor.
2) Motor tegangan tunggal, tidak dapat dibalik
Pada motor ini kumparan bantu dan kumparan utama tersambung di dalam
rumah motor, sehingga hanya dua ujung kumparan yang keluar dari rumah
motor. Arah putaran motor tidak dapat dibalik kecuali motor tersebut
dibongkar dan ujung kumparan bantu dipertukarkan.
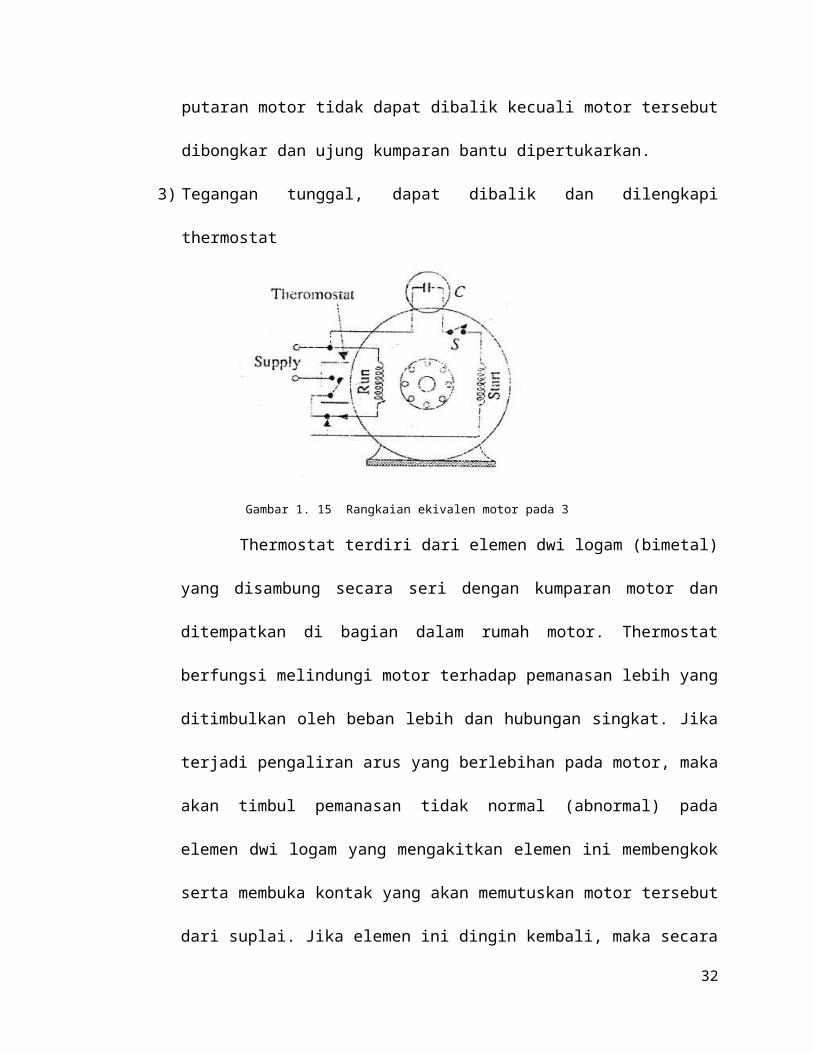
3)Tegangan tunggal, dapat dibalik dan dilengkapi thermostat
23
Gambar 1. 15 Rangkaian ekivalen motor pada 3
Thermostat terdiri dari elemen dwi logam (bimetal) yang disambung
secara seri dengan kumparan motor dan ditempatkan di bagian dalam
rumah motor. Thermostat berfungsi melindungi motor terhadap pemanasan
lebih yang ditimbulkan oleh beban lebih dan hubungan singkat. Jika terjadi
pengaliran arus yang berlebihan pada motor, maka akan timbul pemanasan
tidak normal (abnormal) pada elemen dwi logam yang mengakitkan elemen
ini membengkok serta membuka kontak yang akan memutuskan motor
tersebut dari suplai. Jika elemen ini dingin kembali, maka secara otomatis
akan menutup kontak kembali dan menghubungkan motor dengan
tegangan suplai.
4) Tegangan tunggal, 3 kawat dengan pembalikan putaran
Pada motor ini kumparan utama terdiri dari dua bagian. Kedua bagian ini
R1 dan R2 dihubungkan seri secara internal dan salah satu ujung kumparan
bantu dihubungkan pada pertengahan kedua bagian kumparan ini
(pertengahan R1 dan R2 ).
Kedua ujung kawat kumparan utama dan salah satu ujung kawat kumparan
bantu dikeluarkan dari rumah motor. Jika ujung kumparan bantu yang
24
berada di luar rumah motor dihubungkan ke titik A, maka kumparan
terhubung melalui R1 dan motor berputar searah jarum jam. Jika ujung
kumparan bantu dihubungkan ke titik B, maka kumparan terhubung melalui
R2. Karena arus yang mengalir melalui kumparan bantu berbalik arah,
maka motor berputar dalam arah berla-wanan arah jarum jam.
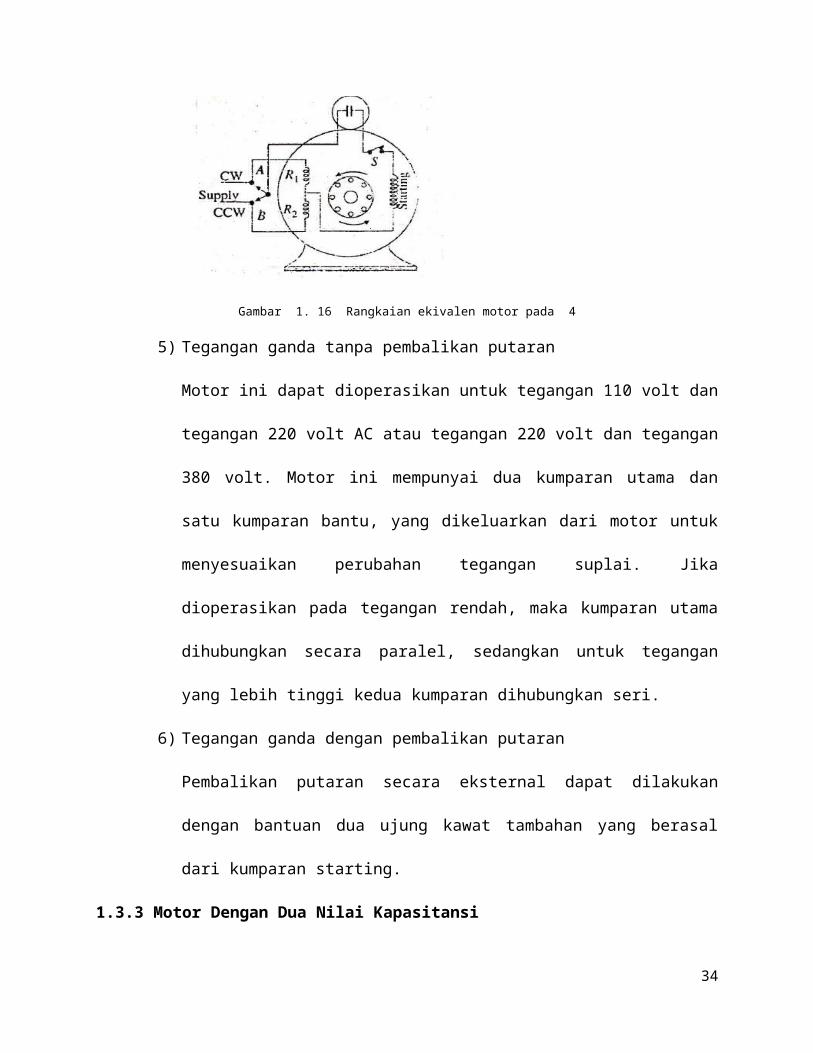
Gambar 1. 16 Rangkaian ekivalen motor pada 4
5) Tegangan ganda tanpa pembalikan putaran
Motor ini dapat dioperasikan untuk tegangan 110 volt dan tegangan 220
volt AC atau tegangan 220 volt dan tegangan 380 volt. Motor ini
mempunyai dua kumparan utama dan satu kumparan bantu, yang
dikeluarkan dari motor untuk menyesuaikan perubahan tegangan suplai.
Jika dioperasikan pada tegangan rendah, maka kumparan utama
dihubungkan secara paralel, sedangkan untuk tegangan yang lebih tinggi
kedua kumparan dihubungkan seri.
6) Tegangan ganda dengan pembalikan putaran
Pembalikan putaran secara eksternal dapat dilakukan dengan bantuan dua
ujung kawat tambahan yang berasal dari kumparan starting.
25

1.3.3 Motor Dengan Dua Nilai Kapasitansi
Motor dengan dua nilai kapasitansi adalah motor kapasitor yang start
dengan satu nilai kapasitansi yang terhubung seri dengan kumparan bantunya
dan berputar dengan kapasitor lain yang berbeda nilai kapasitansinya. Motor ini
distarting dengan kapasitor yang mempunyai nilai kapasitansi yang relatif besar
serta terhubung seri dengan kumparan starting, serta torsi starting yang dihasilkan
juga besar. Pada saat running (berputar) dengan bantuan saklar sentrifugal,
belitan bantu dihubungkan ke suatu kapasitor lain dengan nilai kapasitansi yang
lebih rendah. Kondisi ini seperti motor dua fasa, dimana kumparan bantu
terhubung seri dengan sebuah kapasitor.
Kapasitansi dengan dua nilai dapat diperoleh dengan cara:
1) Menggunakan dua kapasitor paralel pada saat starting, tetapi salah satu
kapasitor akan diputuskan dari rangkaian pada saat motor telah berputar
normal.
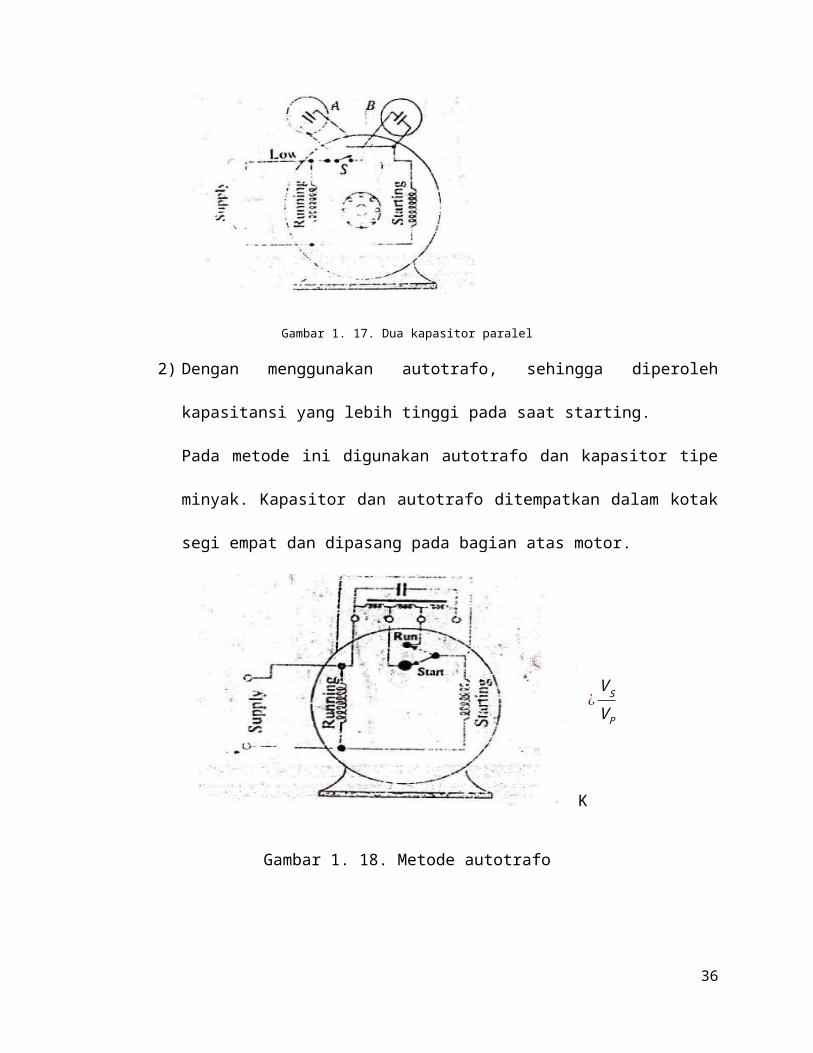
Gambar 1. 17. Dua kapasitor paralel
2) Dengan menggunakan autotrafo, sehingga diperoleh kapasitansi yang lebih
tinggi pada saat starting.
26
Pada metode ini digunakan autotrafo dan kapasitor tipe minyak. Kapasitor
dan autotrafo ditempatkan dalam kotak segi empat dan dipasang pada
bagian atas motor.
K
¿V S
V P
Gambar 1. 18. Metode autotrafo
Kapasitor yang tersambung ke sekunder trafo akan berfungsi sebagai sekunder
trafo dengan nilai kapasitansi K2C, dimana K adalah perbandingan transformasi
tegangan.
Jika K = 3 dan kapasitansi (C) = 4 μF, maka nilai kapasitansi efektif adalah C=: 32
x 4 = 36 μF. Dengan meningkatnya kecepatan motor, maka saklar sentrifugal akan
menggeser penyambungan kapasitor dari tapping tegangan yang satu ke tapping
tegangan yang lain sehingga perbandingan transformasi tegangan berubah dari
nilai yang lebih tinggi ke nilai ymg lebih rendah.
C1 adalah kapasitor dengan kapasitansi yang relatif besar, tipe elektrolit dengan
waktu kerja yang pendek (short duty). Kapasitor C2 dengan nilai kapasitansi yang
lebih rendah adalah tipe isolasi minyak dengan waktu kerja yang kontinyu
(continuous duty).
27
Kapasitor Cl kapasitansinya 10 sampai dengan 15 kali kapasitor C2. Pada saat
starting, kedua kapasitor tersebut terhubung paralel, maka kapasitansi total:
Ctotal : C1 + C2 (jumlah nilai kapasitansi kedua kapasitor).
Setelah kecepatan motor mencapai 75% kecepatan nominal, maka saklar
setrifugal akan terbuka dan berpindah ke kapasitor C2, sehingga pada saat
running kumparan bantu hanya terhubung kapasitor C2.
Motor ini mempunyai beberapa nilai tambah dari motor kapasitor start:
1. Kemampuan menggerakkan beban berat.
2. Suara yang halus
3. Efisiensi dan faktor daya yang lebih tinggi
4. Kemampuan overload 1,25 x beban penuh
5. Meningkatkan torsi starting 5 sampai dengan 20%.
Aplikasinya pada kompressor yang membutuhkan torsi starting yang tinggi.
1.3.4 Motor Kapasitor Belah Permanen
Motor kapasitor belah permanen adalah sebuah motor kapasitor yang
menggunakan sebuah kapasitor pada kumparan bantu, dimana kapasitor tersebut
terhubung secara permanen dan mernpunyai sebuah nilai kapasitansi yang tetap.
Tidak diperlukan saklar sentrifugal pada motor ini. Motor ini berperilaku seperti
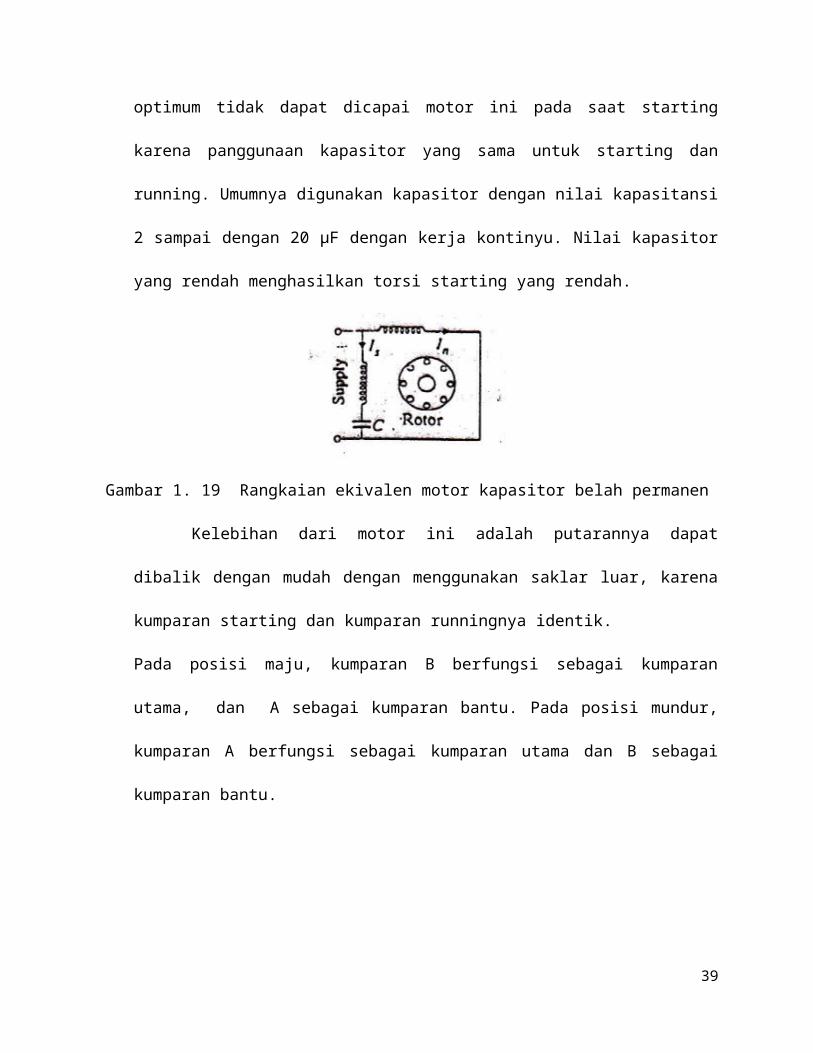
motor dua fasa tidak seimbang. Kinerja optimum tidak dapat dicapai motor ini
pada saat starting karena panggunaan kapasitor yang sama untuk starting dan
running. Umumnya digunakan kapasitor dengan nilai kapasitansi 2 sampai dengan
20 μF dengan kerja kontinyu. Nilai kapasitor yang rendah menghasilkan torsi
starting yang rendah.
28
Gambar 1. 19 Rangkaian ekivalen motor kapasitor belah permanen
Kelebihan dari motor ini adalah putarannya dapat dibalik dengan mudah
dengan menggunakan saklar luar, karena kumparan starting dan kumparan
runningnya identik.
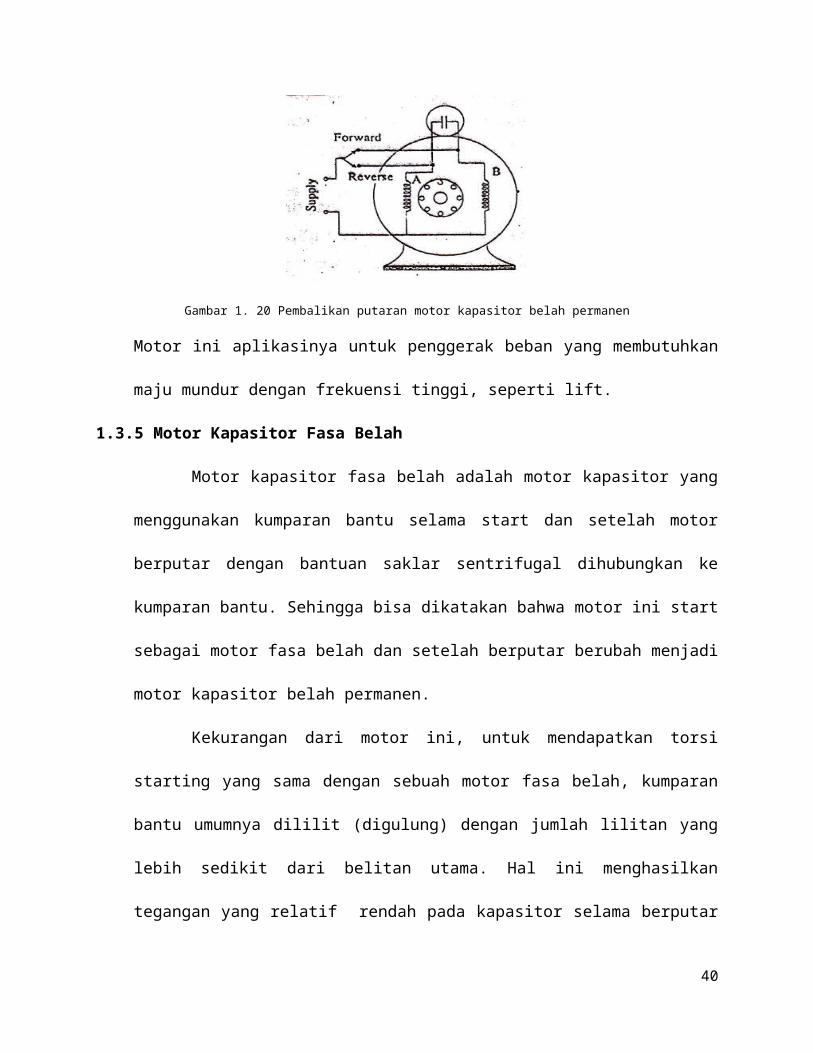
Pada posisi maju, kumparan B berfungsi sebagai kumparan utama, dan A
sebagai kumparan bantu. Pada posisi mundur, kumparan A berfungsi sebagai
kumparan utama dan B sebagai kumparan bantu.
Gambar 1. 20 Pembalikan putaran motor kapasitor belah permanen
Motor ini aplikasinya untuk penggerak beban yang membutuhkan maju mundur
dengan frekuensi tinggi, seperti lift.
1.3.5 Motor Kapasitor Fasa Belah
Motor kapasitor fasa belah adalah motor kapasitor yang menggunakan
kumparan bantu selama start dan setelah motor berputar dengan bantuan saklar
sentrifugal dihubungkan ke kumparan bantu. Sehingga bisa dikatakan bahwa
29
motor ini start sebagai motor fasa belah dan setelah berputar berubah menjadi
motor kapasitor belah permanen.
Kekurangan dari motor ini, untuk mendapatkan torsi starting yang sama
dengan sebuah motor fasa belah, kumparan bantu umumnya dililit (digulung)
dengan jumlah lilitan yang lebih sedikit dari belitan utama. Hal ini menghasilkan
tegangan yang relatif rendah pada kapasitor selama berputar yang mana
tegangan ini lebih rendah dari nilai tegangan penuh. Untuk meningkatkan
tegangan pada kapasitor ke nilai operasi normalnya, sebuah bagian dari
kumparan bantu ditambahkan ke motor.
Gambar 1. 21 Rangkaian ekivalen motor kapasitor fasa belah
1.4 Karakteristik dan Jenis Aplikasi Motor Induksi Satu Fasa
Karakteristik dan aplikasi motor induksi satu fasa diringkas dan disajikan dalam
tabel 1.
30
Tabel 1 Karakteristik dan aplikasi dari motor induksi satu fasa
31
BAB II
MOTOR UNIVERSAL
2.1 Pendahuluan
Motor universal adalah motor seri atau motor seri yang terkornpensasi
yang didesain untuk beroperasi untuk kecepatan dan daya yang sama untuk
tegangan searah atau pun tegangan bolak balik satu fasa yang nilai tegangan rms-
nya sama dengan tegangan DC tersebut dan frekuensinya tidak lebih besar dari 60
Hz. Kecepatan tanpa beban motor ini sangat tinggi, yaitu sekitar 20000 rpm, tetapi
rangkaian jangkarnya sudah dirancang untuk tidak rusak pada kecepatan ini.
Kecepatan beban penuhnya adalah 4000 sampai dengan 16000 rpm dengan rating
daya 1 mhp sampai dengan 1 hp.
Motor universal dapat diklasifikasikan dalam dua jenis:
1. Jenis motor dengan kutub terkonsentrasi, tak terkompensasi
Mempunyai dua kutub, menonjol dan mirip dengan motor DC seri dua
kutub, terkecuali bahwa seluruh jalur magnetiknya dilaminasi. Stator yang
dilaminasi dibutuhkan untuk mengurangi rugi yang ditimbulkan fluks bolak-
balik jika motor dioperasikan pada tegangan AC. Jangkarnya merupakan
motor belitan yang mirip dengan jangkar motor DC ukuran kecil. Jangkar ini
terdiri dari laminasi inti dengan alur-alur lurus atau miring serta sebuah
komutator tempat dimana disambung ujung kumparan jangkar.
2. Jenis motor dengan medan terdistribusi, terkompensasi
Jangkarnya adalah rotor belitan yang mirip dengm jangkar motor DC
ukuran kecil dan statornya mirip stator untuk motor induksi dua kutub. Pada
32
motor jenis ini terdapat kumparan kompensasi, yaitu kumparan yang
dihubungkan secara seri dengan jangkar dan diatur sedemikian rupa
sehingga ampere-lilitan dari kumparan ini berlawanan dan meniadakan
ampere-lilitan dari kumparan jangkar. Tujuan dari kumparan kompensasi ini
adalah untuk menghilangkan tegangan reaktansi yang terjadi pada jangkar
jika motor dioperasikan pada tegangan bolak-balik.Tegangan reaktansi ini
menyerap sebagaian dari tegangan jala-jala, sehingga mengurangi
tegangan yang diaplikasikan ke jangkar, sehingga kecepatan motor
menjadi berkurang.
2.2 Operasi Motor Universal
2.2. 1 Operasi Pada Sumber Tegangan Bolak-Balik
Jika tegangan bolak balik diaplikasikan pada sebuah motor seri, motor
tersebut akan start dan kemudian berputar. Jika tegangan bolak balik yang
diaplikasi adalah 50 Hz, maka arus pada rangkaian jangkar akan bervariasi
sebanyak 100 kali setiap detik, demikian pada eksitasi medan dan fluks stator.
Namun, ada beberapa efek yang timbul jika motor universal dioperasikan pada
sumber tegangan AC dan efek ini tidak terjadi jika motor beroperasi pada sumber
tegangan DC. Efek-efek tersebut adalah:
1. Kumparan medan seri harus dilaminasi
Karena fluks stator berubah-ubah, maka sangat perlu untuk menggunakan
kontruksi rangkaian medan yang terlaminasi dalam rangka mengurangi rugi
arus histeresis dan arus eddy (arus pusar).
- Rugi arus histeresis Ph = K f Bmaks 1,6 - 2
33
Kh = konstanta histeresis ( tergantung jenis bahan)
f = frekuensi
Bmaks = rapat fluks maksimum
- Rugi arus eddy Pe = Ke f2 Bmaks2
Ke = konstanta arus eddy ( tergantung jenis bahan)
2. Tegangan reaktansi
Reaktansi timbul dalam sebuah rangkaian AC ketika sebuah rangkaian
magnet dibentuk oleh arus yang mengalir dalam rangkaian listrik. Tegangan
reaktansi ini menyerap sebagian dari tegangan jala-jala sehingga
mengurangi tegangan yang diaplikasikan ke jangkar, dengan demikian
mengurangi kecepatan motor.
3. Efek kejenuhan magnet
Menyebabkan putaran motor universal AC pada kondisi tanpa beban lebih
tinggi dibandingkan dengan pada tegangan DC tanpa beban.
4. Komutasi dan umur sikat
Komutasi pada arus bolak-balik lebih jelek dibandingkan pada arus searah,
sehingga menyebabkan umur sikat menjadi berkurang, Jeleknya komutasi
pada arus bolak-balik ini akibat terinduksinya tegangan pada saat sikat
terhubung singkat.
2.2. 2 Operasi Pada Sumber Tegangan Searah
Prinsip kerjanya sama dengan prinsip kerja motor DC seri. Bagian
berputar (jangkar) terhubung seri dengan kumparan medan seri, komutator dan
34

sikat berfungsi sebagai saklar berputar yang akan membalik arah arus pada
kumparan jangkar pada saat kumparan jangkar ini berputar.
Torsi yang dibangkitkan pada motor ini berbanding lurus dengan rapat
fluks dari medan seri dan besar arus yang mengalir pada konduktor belitan
jangkar.
T = Kt B Ia = Kt If Ia
Kt = Konstanta torsi
B =: Rapat fluks karena arus yang mengalir dalam kumparan seri
Tetapi karena Ir = Ia
Maka T = Kt Ia2
Torsi yang dibangkitkan pada motor universal berbanding lurus dengan
arus jangkar pangkat dua.
2.3 Pembalikan putaran
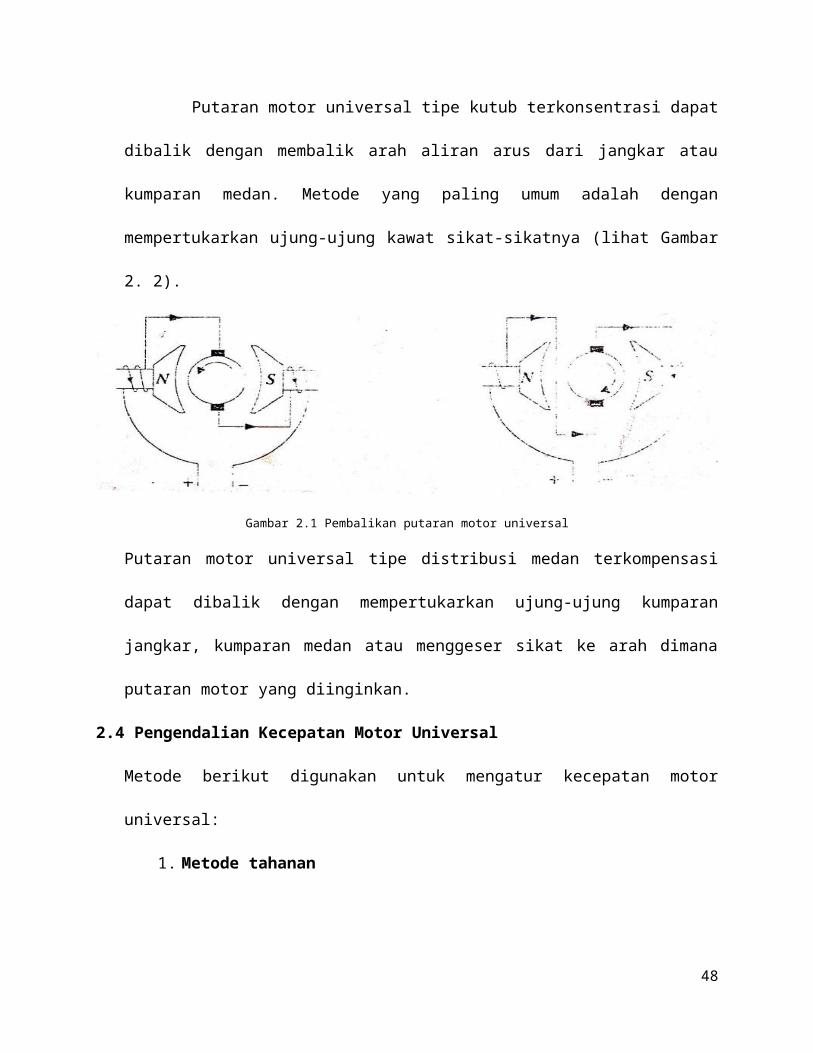
Putaran motor universal tipe kutub terkonsentrasi dapat dibalik dengan
membalik arah aliran arus dari jangkar atau kumparan medan. Metode yang paling
umum adalah dengan mempertukarkan ujung-ujung kawat sikat-sikatnya (lihat
Gambar 2. 2).
Gambar 2.1 Pembalikan putaran motor universal
35
Putaran motor universal tipe distribusi medan terkompensasi dapat dibalik dengan
mempertukarkan ujung-ujung kumparan jangkar, kumparan medan atau menggeser
sikat ke arah dimana putaran motor yang diinginkan.
2.4 Pengendalian Kecepatan Motor Universal
Metode berikut digunakan untuk mengatur kecepatan motor universal:
1. Metode tahanan
Seperti diperlihatkan pada Gambar 2.2, kecepatan motor dikendalikan
dengan memasang sebuah tahanan variabel R seri dengan motor. Metode
ini digunakan untuk motor pada mesin jahit. Besar tahanan rangkaian
dirubah dengan menggunakan injakan / pedal.
Gambar 2.2 Metode tahanan
2. Metode tapping medan
Untuk metode ini, medan kutub di tap pada beberapa titik dan kecepatan
motor dikendalikan dengan merubah-rubah kuat medan (Gambar 2.3 a).
Untuk maksud tersebut, dapat digunakan susunan berikut:
Kumparan medan dililit dalam beberapa bagian dengan ukuran
kawat berbeda dan ujung tapping dikeluarkan dari setiap bagian
tersebut.
36
Kawat tahanan nichrom dililit pada satu kutub medan dan tap
dikeluarkan dari kawat tersebut
(a) (b)
Gambar 2.3 Metode tapping medan dan saklar sentrifugal
3. Saklar sentrifugal
Motor universal, khususnya yang digunakan untuk mixer juice mempunyai
beberapa kecepatan. Pemilihan kecepatan dapat dilakukan melalui suatu
peralatan sentrifugal yaurg terletak pada bagian dalam motor dengan cara
penyambungan seperti diperlihatkan pada Gambar 2.3 b. Saklarnya diatur
dengan bantuan tuas eksternal. Jika kecepatan putaran meningkat, saklar
sentrifugal akan membuka dan menghubungkan suatu tahanan R ke dalam
rangkaian, dan akan menyebabkan penurunan kecepatan.
Jika putaran motor telah menurun, saklar sentrifugal akan menutup dan
menghubung singkat tahanan tersebut, dengan demikian kecepatan motor
meningkat kembali. Proses ini berulang terus-menerus dengan cepat,
sehingga variasi kecepatan motor tidak terasa. Digunakan kapasitor C di
antara permukaan kontak untuk mengurangi bunga api yang timbul pada
saat pembukaan dan penutupan kontak. Kapasitor ini juga mengurangi
kemungkinan rusaknya permukaan kontak saklar sentrifugal.
37

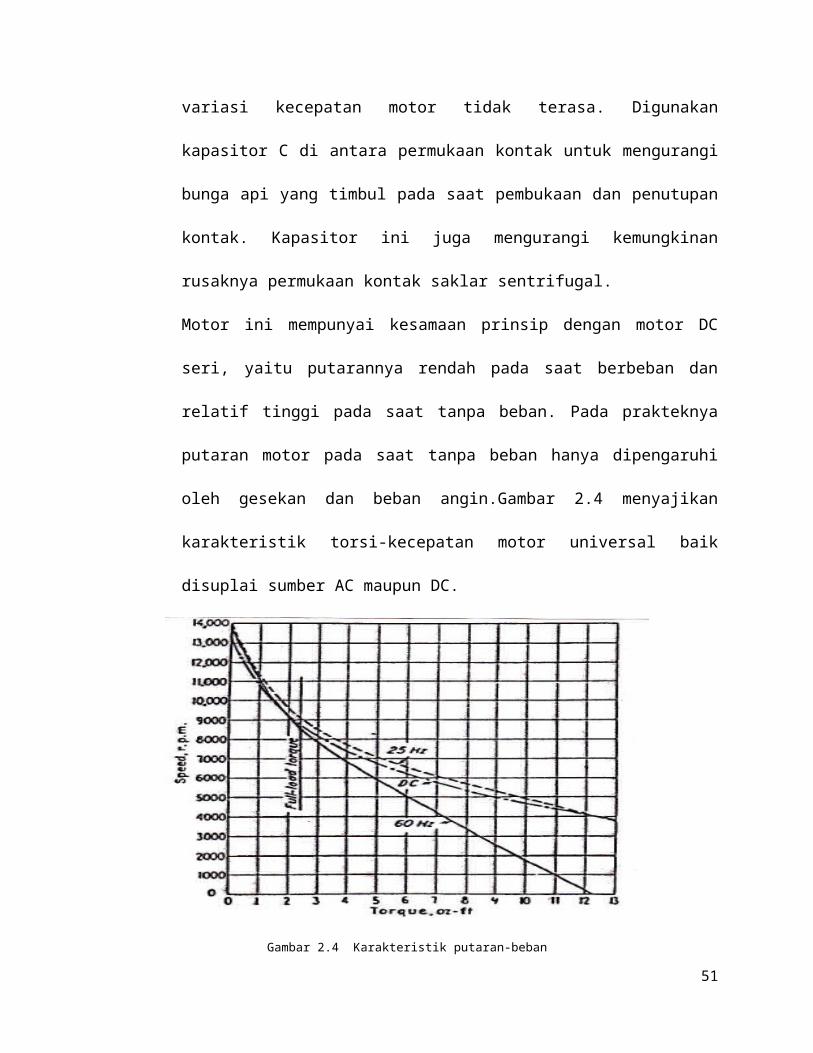
Motor ini mempunyai kesamaan prinsip dengan motor DC seri, yaitu
putarannya rendah pada saat berbeban dan relatif tinggi pada saat tanpa
beban. Pada prakteknya putaran motor pada saat tanpa beban hanya
dipengaruhi oleh gesekan dan beban angin.Gambar 2.4 menyajikan
karakteristik torsi-kecepatan motor universal baik disuplai sumber AC
maupun DC.
Gambar 2.4 Karakteristik putaran-beban
2.5 Aplikasi Motor Universal
Motor ini bisa digunakan pada pengisap debu, dimana kecepatan putaran
motor sebenamya adalah kecepatan beban yang digerakkan. Pada penggunaan
lainnya, putarannya diturunkan dengan bantuan roda gigi, misalnya untuk mixer
kue, bor tangan dan mesin jahit.
38
BAB III
MOTOR STEPPER
3.1 Pendahuluan
Motor stepper adalah perangkat elektromekanis yang bekerja dengan
mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper
bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk
menggerakkan motor stepper diperlukan pengendali motor stepper yang
membangkitkan pulsa-pulsa periodik.
Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan
dengan penggunaan motor DC biasa. Keunggulannya antara lain adalah:
Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih
mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi.
Memiliki respon yang sangat baik terhadap start (mulai), stop, dan berbalik
putaran.
Sangat bisa diandalkan (realible) karena tidak adanya sikat yang
bersentuhan dengan rotor seperti pada motor DC.
Dapat menghasikan putaran yang lambat sehingga beban dapat dikopel
langsung ke porosnya.
Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada
jangkauan (range) yang luas.
3.2 Pengertian Motor Stepper
Motor stepper adalah motor listrik yang dikendalikan dengan pulsa-pulsa
digital, bukan dengan memberikan tegangan yang terus-menerus. Deretan pulsa
diterjemahkan menjadi putaran shaft, dimana setiap putaran membutuhkan jumlah
pulsa yang ditentukan. Satu pulsa menghasilkan satu kenaikan putaran atau step,
39
yang merupakan bagian dari suatu putaran penuh. Oleh karena itu perhitungan
jumlah pulsa dapat diterapkan untuk mendapatkan jumlah putaran yang diinginkan.
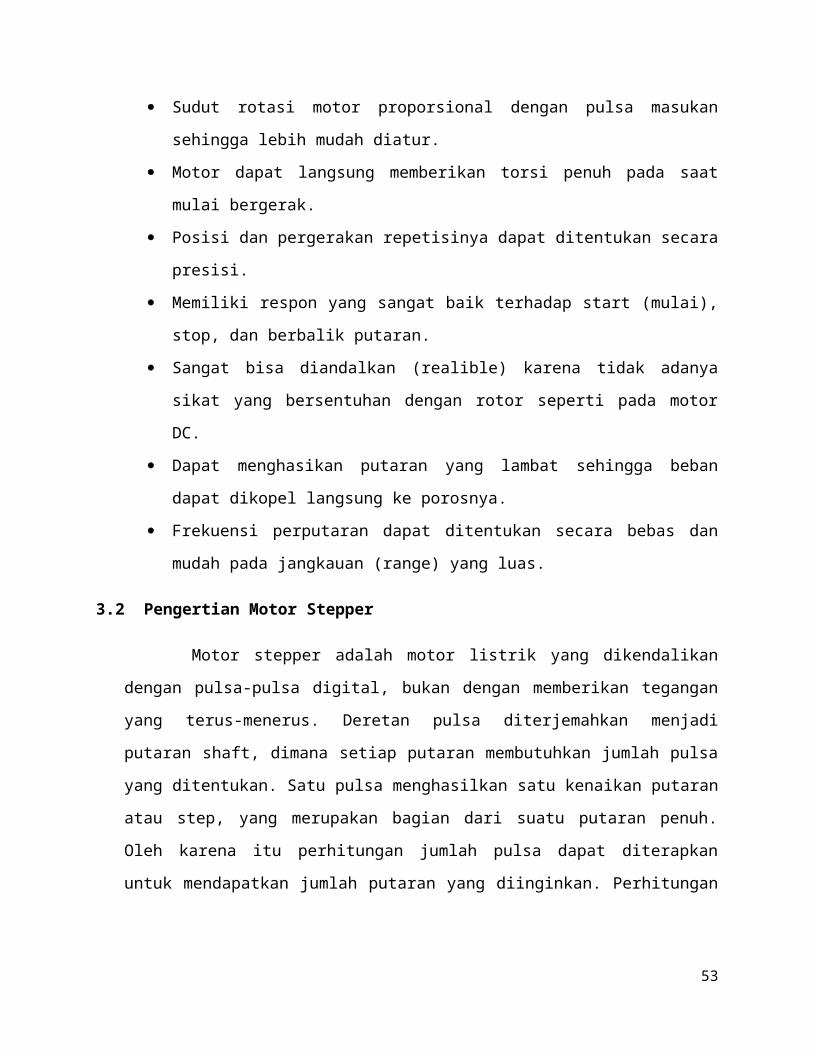
Perhitungan pulsa secara otomatis menunjukkan besarnya putaran yang telah
dilakukan, tanpa memerlukan informasi balik (feedback).
Gambar 3.1 Diagram waktu Motor Stepper
Ketepatan kontrol gerak motor stepper terutama dipengaruhi oleh jumlah
step tiap putaran; semakin banyak jumlah step, semakin tepat gerak yang
dihasilkan. Untuk ketepatan yang lebih tinggi, beberapa driver motor stepper
membagi step normal menjadi setengah step (half step) atau mikro step.
Gambar 3.2 Step tiap putaran Motor Stepper
Bagian-bagian dari motor steper yaitu tersusun atas motor, stator,
bearing, casing dan sumbu. Sumbu merupakan pegangan dari rotor dimana sumbu
adalah bagian tengah dari rotor, sehingga ketika rotor berputar sumbu ikut berputar.
Stator memiliki dua bagian yaitu plat inti dan lilitan. Plat inti dari motor stepper ini
biasanya menyatu dengan casing. Casing motor stepper terbuat dari aluminium dan
ini berfungsi sebagai dudukan bearing dan stator, pemegangnya adalah baut
sebanyak empat puluh. Di dalam motor stepper memiliki dua buah bearing yaitu
bearing bagian atas dan bearing bagian bawah.
40

Gambar 3.3 Bearing pada Motor Stepper
Pada motor stepper umumnya tertulis spesifikasi Np (= pulsa/rotasi).
Sedangkan kecepatan pulsa diekspresikan sebagai pps (= pulsa/second) dan
kecepatan putar umumnya ditulis sebagai Ѡ (= rotasi/menit atau rpm). Kecepatan
putar motor stepper (rpm) dapat di ekspresikan menggunakan kecepatan pulsa
(pps) sebagai berikut :
Ѡ = 60 ppsN p
[rotasi/menit]
= 60N p
pps
Oleh karena 1 rotasi = 3600, maka tingkat ketelitian motor stepper dapat di
ekspresikan dalam rumus sebagai berikut :
δ= o
pulsa
δ= 1
N p [ rotasi/pulsa] x 3600
δ= 3600
N p [
opulsa ]
3.3 Jenis-Jenis Motor Stepper
Motor stepper pada umumnya dibedakan berdasarkan magnet yang
digunakan, yaitu tipe permanen magnet dan variabel reluktansi. Pada umumnya
41

motor stepper yang digunakan saat ini adalah motor stepper variabel reluktansi.
Cara yang paling mudah untuk membedakan antara tipe motor stepper di atas
adalah dengan cara memutar rotor dengan tangan ketika motor tidak dihubungkan
ke suplai. Pada motor stepper tipe permanen magnet, ketika diputar dengan
tangan, akan terasa lebih tersendat karena adanya gaya yang ditimbulkan oleh
permanen magnet. Namun, ketika motor dengan variabel reluktansi diputar, akan
lebih halus karena sisa reluktansinya cukup kecil.
Pada dasarnya motor stepper dikelompokkan menjadi 3 jenis, yaitu :
1. Permanent Magnet (PM)
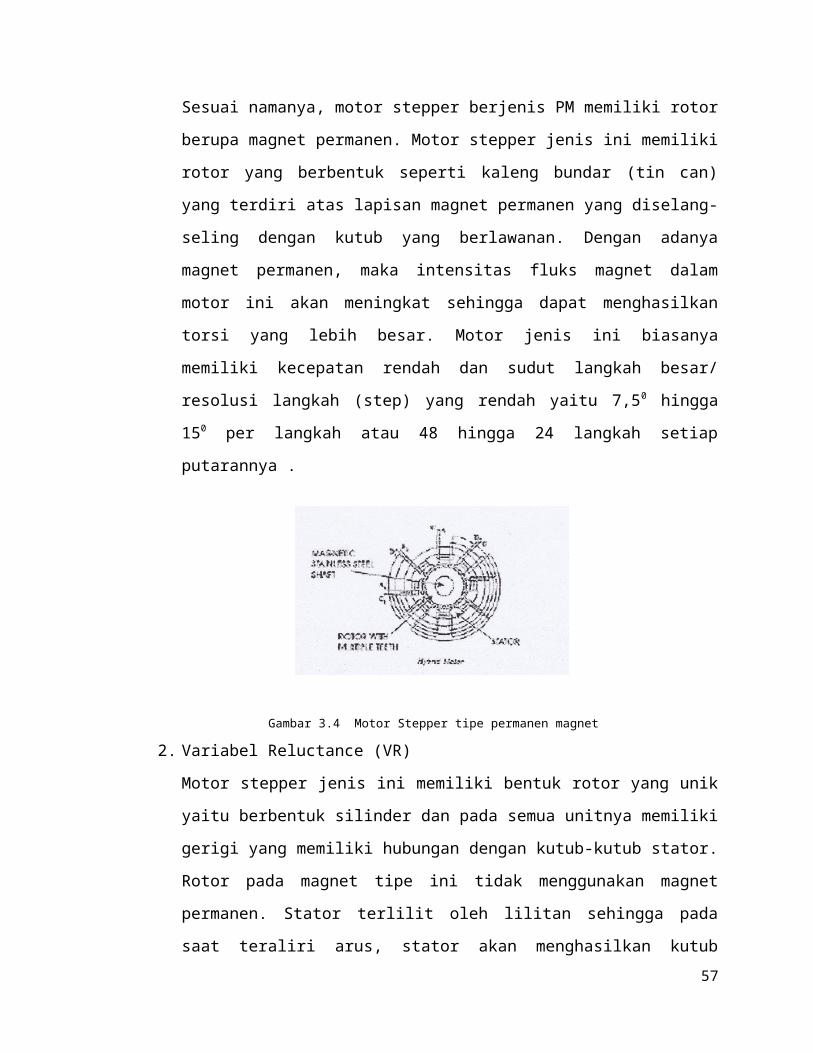
Sesuai namanya, motor stepper berjenis PM memiliki rotor berupa magnet
permanen. Motor stepper jenis ini memiliki rotor yang berbentuk seperti
kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang
diselang-seling dengan kutub yang berlawanan. Dengan adanya magnet
permanen, maka intensitas fluks magnet dalam motor ini akan meningkat
sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini
biasanya memiliki kecepatan rendah dan sudut langkah besar/ resolusi
langkah (step) yang rendah yaitu 7,50 hingga 150 per langkah atau 48
hingga 24 langkah setiap putarannya .
Gambar 3.4 Motor Stepper tipe permanen magnet
2. Variabel Reluctance (VR)
Motor stepper jenis ini memiliki bentuk rotor yang unik yaitu berbentuk
silinder dan pada semua unitnya memiliki gerigi yang memiliki hubungan
dengan kutub-kutub stator. Rotor pada magnet tipe ini tidak menggunakan
42

magnet permanen. Stator terlilit oleh lilitan sehingga pada saat teraliri arus,
stator akan menghasilkan kutub magnet. Jumlah gerigi pada rotor akan
menentukan langkah atau step motor. Perbedaan motor stepper berjenis
PM dan VR yaitu motor berjenis VR memiliki torsi yang relatif lebih kecil
dibanding dngan motor stepper berjenis PM. Hal lain yang dapat dilihat
adalah sisa kemagnetan sangat kecil, sehingga pada saat motor stepper
tidak dialiri arus, maka ketika di putar tidak ada torsi yang melawan. Sudut
langkah motor stepper berjenis VR ini bervariasi yaitu sekitar sampai
dengan 300. Motor stepper berjenis VR ini memiliki torsi yang kecil. Sering
ditemukan pada printer dan instrumen-instrumen pabrik yang ringan yang
tidak membutuhkan torsi yang besar.
Gambar 3.5 Variabel Reluktansi Motor
Seperti pada gambar di atas, motor mempunyai 3 pasang kutub stator (A,
B, C) yang diset terpisah 150. Arus dialirkan ke kutub A melalui lilitan motor
yang menyebabkan tarikan magnetik yang menyejajarkan gigi rotor ke
kutub A. Jika kita memberi energi ke kutub B maka akan menyebabkan
rotor berputar 150 sejajar kutub , proses ini akan berlanjut ke kutub C dan
kembali ke kutub A searah dengan jarum jam.
Pada motor stepper yang mempunyai variabel reluktansi maka terdapat 3
buah lilitan yang pada ujungnya dijadikan satu pada sebuah pin common.
Untuk dapat menggerakkan motor ini maka aktivasi tiap-tiap lilitan harus
sesuai urutannya.
43

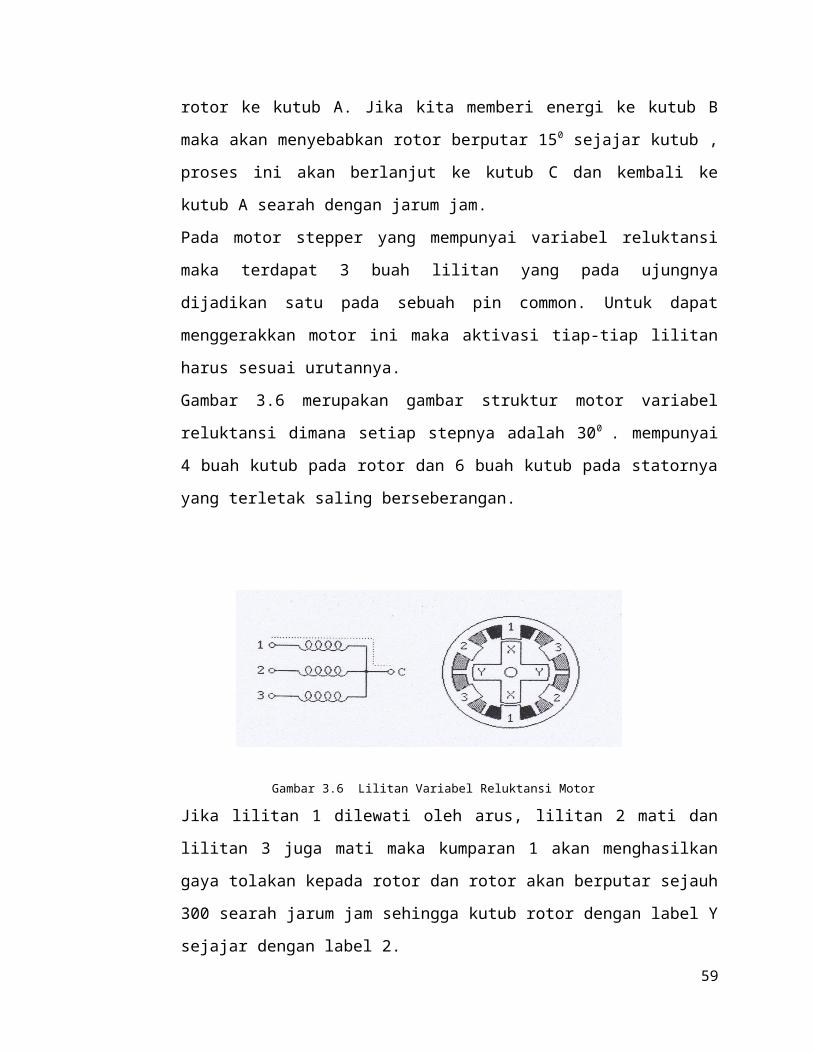
Gambar 3.6 merupakan gambar struktur motor variabel reluktansi dimana
setiap stepnya adalah 300 . mempunyai 4 buah kutub pada rotor dan 6 buah
kutub pada statornya yang terletak saling berseberangan.
Gambar 3.6 Lilitan Variabel Reluktansi Motor
Jika lilitan 1 dilewati oleh arus, lilitan 2 mati dan lilitan 3 juga mati maka
kumparan 1 akan menghasilkan gaya tolakan kepada rotor dan rotor akan
berputar sejauh 300 searah jarum jam sehingga kutub rotor dengan label Y
sejajar dengan label 2.
Jika kondisi seperti ini berulang terus menerus secara berurutan, lilitan 2
dilewati arus kemudian lilitan 3 maka motor akan berputar secara terus
menerus. Maka agar dapat berputar sebanyak 21 step maka perlu diberikan
data dengan urutan seperti berikut: :
Lilitan 1 : 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1
Lilitan 2 : 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0
Lilitan 3 : 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0
‘1’ pada data di atas diartikan bahwa lilitan yang bersangkutan dilewati
arus sehingga menghasilkan gaya tolak untuk rotor. Sedangkan ‘0’ diartikan
lilitan dalam kondisi off, tidak mendapatkan arus.
3. Permanent Magnet-Hybrid (PM-H)
Permanent magnet hybrid merupakan penyempurnaan motor stepper
dimana motor stepper ini memiliki kecepatan 1000 step/detik namun juga
44
memiliki torsi yang cukup besar. Sehingga dapat dikatakan bahwa PM-H
merupakan motor stepper kombinasi antara PM dan VR motor stepper.
Motor hybrid mengkombinasikan karakteristik terbaik dari motor variabel
reluktansi dan motor magnet permanen. Motor ini dibangun dengan kutub
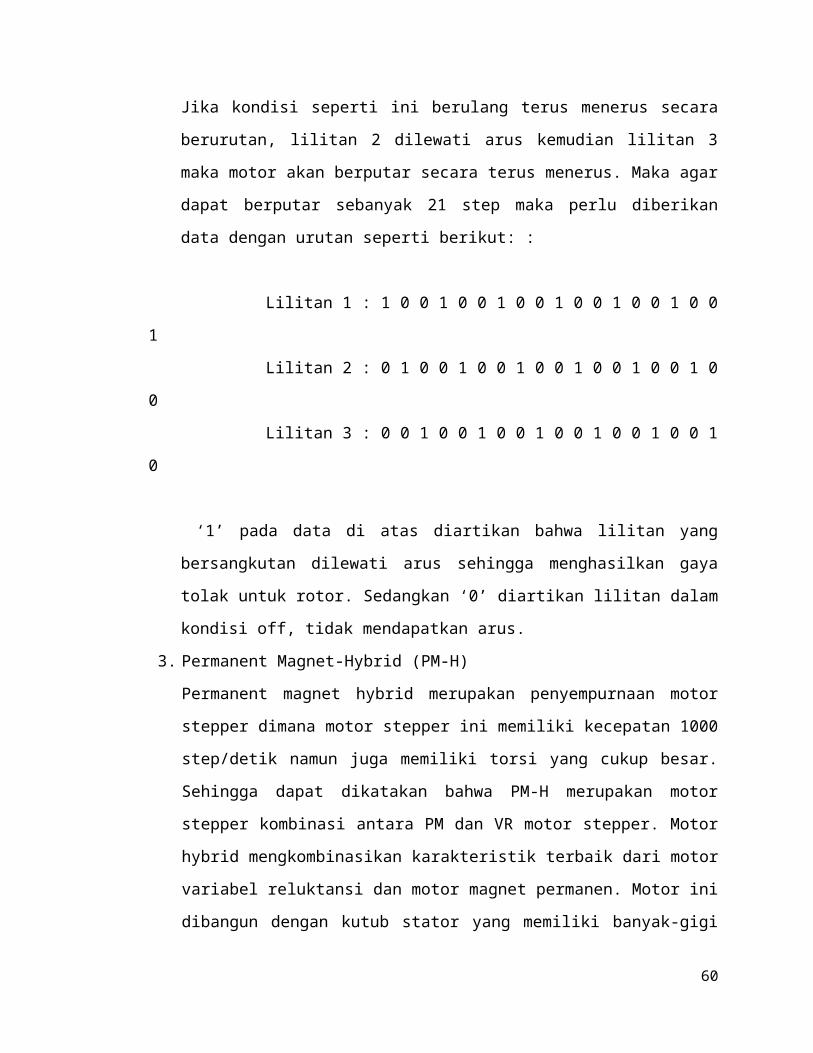
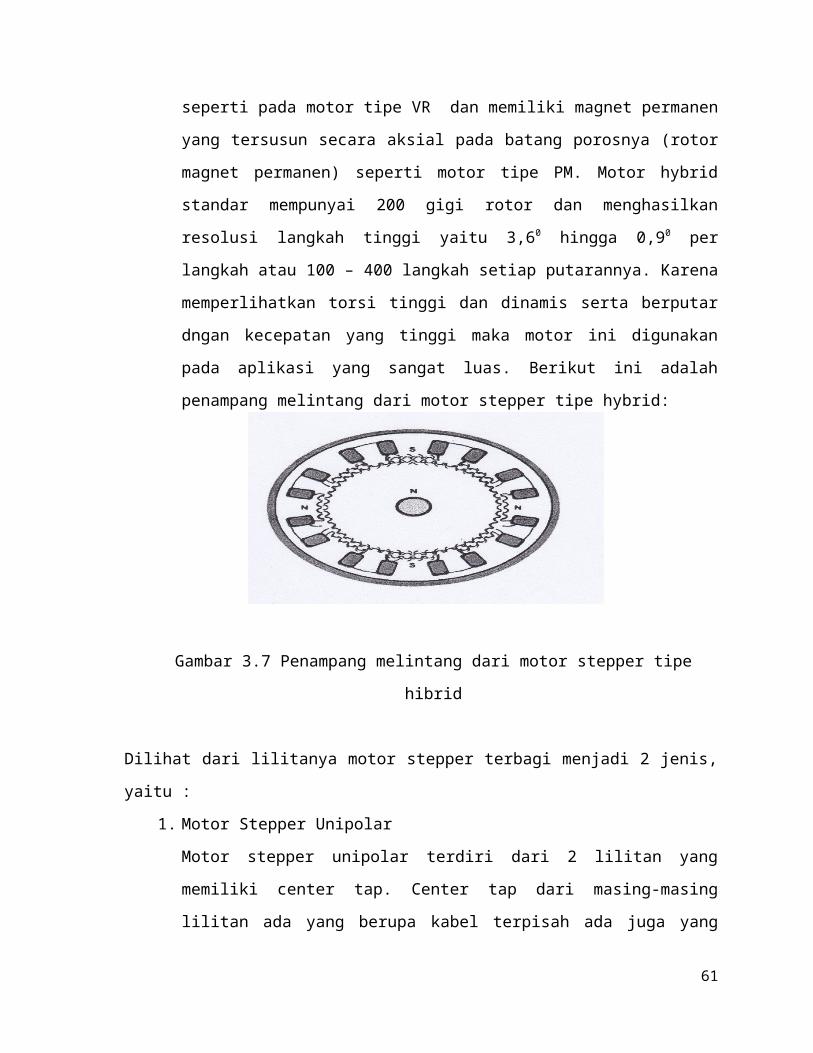
stator yang memiliki banyak-gigi seperti pada motor tipe VR dan memiliki
magnet permanen yang tersusun secara aksial pada batang porosnya
(rotor magnet permanen) seperti motor tipe PM. Motor hybrid standar
mempunyai 200 gigi rotor dan menghasilkan resolusi langkah tinggi yaitu
3,60 hingga 0,90 per langkah atau 100 – 400 langkah setiap putarannya.
Karena memperlihatkan torsi tinggi dan dinamis serta berputar dngan
kecepatan yang tinggi maka motor ini digunakan pada aplikasi yang sangat
luas. Berikut ini adalah penampang melintang dari motor stepper tipe
hybrid:
Gambar 3.7 Penampang melintang dari motor stepper tipe hibrid
Dilihat dari lilitanya motor stepper terbagi menjadi 2 jenis, yaitu :
1. Motor Stepper Unipolar
Motor stepper unipolar terdiri dari 2 lilitan yang memiliki center tap. Center
tap dari masing-masing lilitan ada yang berupa kabel terpisah ada juga
yang sudah terhubung di dalamnya sehingga center tap yang keluar hanya
satu kabel. Untuk motor stepper yang center tapnya ada pada masing-
masing lilitan, kabel inputnya ada 6 kabel. Namun jika center tapnya sudah
terhubung di dalam kabel inputnya hanya 5 kabel. Center tap dari motor
stepper dapat di hubungkan ke pentanahan atau ada juga yang
45

menghubungkannya ke +VC. Hal ini sangat dipengaruhi oleh driver yang
digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper
unipolar pada gambar berikut :
Gambar 3.8 Motor Stepper Unipolar
Rangkaian pengendali motor stepper unipolar hanya memerlukan satu
switch/transistor setiap lilitannya. Untuk menjalankan dan menghentikan
motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas
tegangan positif dan nol (ground) pada salah satu terminal lilitan motor
sementara terminal lainnya dicatu dengan tegangan positif konstan (VM)
pada bagian tengah (center tap) dari lilitan.
Gambar 3.9 Motor Stepper dengan lilitan unipolar
2. Motor Stepper Bipolar
Motor stepper bipolar memiliki 2 lilitan. Perbedaan dengan tipe unipolar
adalah bahwa pada tipe bipolar lilitanya tidak memiliki center tap.
Keunggulan tipe bipolar yaitu memiliki torsi yang lebih besar jika
dibandingkan dengan tipe unipolar untuk ukuran yang sama. Pada motor
46
stepper tipe ini hanya memiliki empat kabel masukan. Namun untuk
menggerakkan motor stepper tipe ini lebih rumit jika dibandingkan dengan
menggerakkan motor stepper unipolar. Sebagai gambaran dapat dilihat
konstruksi motor stepper bipolar pada gambar berikut :
Gambar 3.10 Motor Stepper Bipolar
Pada pengendalian motor stepper dengan lilitan bipolar, diperlukan sinyal
pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada
setiap terminal lilitan (A dan B) harus dihubungkan dengan sinyal yang
mengayun dari positif ke negatif dan sebaliknya.
Gambar 3.11 Motor stepper dengan lilitan bipolar
3.4 Pengendali Motor StepperBerikut ini akan diberikan contoh perancangan dan perhitungan rangkaian
pengendali motor stepper sederhana. Motor stepper yang digunakan pada contoh
ini bertipe hybrid unipolar, memiliki empat fasa dan panjang langkah sebesar 1,80
47
perlangkah. Motor di harapkan dapat berputar dalam dua arah dan memiliki dua
kecepatan. Karena itu diperlukan pengendali motor stepper yang memiliki empat
keluaran pulsa dengan kemampuan dua arah perputaran dan dua macam frekuensi
pulsa guna mengatur kecepatan motor.
Rangkaian pengendali motor stepper (stepper motor driver) menggunakan
komponen utama berupa sebuah IC logika XOR (74LS86) dan sebuah IC JK flip-
flop (74LS76). Rangkaian dengan kedua IC tersebut berfungsi untuk menghasilkan
empat pulsa keluaran berurutan dan dapat berbalik urutannya dengan menerapkan
logika tertentu pada rangkaian. Rangkaian tersebut memerlukan pulsa clock untuk
dapat beroperasi. Sebagai sumber clock digunakan rangkaian berbasis IC timer
555. Rangkaian pembangkt clock ini dapat menghasilkan dua macam frekuensi
pulsa keluaran guna mendukung dua kecepatan motor stepper. Kemudian untuk
mendukung pulsa-pulsa dengan arus besar (sekitar 1-3 A) digunakan transistor
daya NPN tipe TIP31 sebagai solid state switch. Untuk lebih jelasnya perhatikan
rangkaian utama dari pengendali motor stepper di bawah ini :
Gambar 3.11 Skema rangkaian pengendali motor stepper
Gambar 3.11 di atas adalah skema rangkaian pengendali motor stepper yang
dapat bergerak ke dua arah. Keluaran pengendali motor stepper ini ada empat
(pena 15, 14, 11, 10 dari IC 74LS76). Pena-pena tersebut akan menghasilkan pulsa
48
yang dapat menggerakkan motor stepper. Berikut ini adalah ilustrasi struktur motor
stepper sederhana dan pulsa yang dibutuhkan untuk menggerakkannya.
Gambar 3.12. (a) bentuk pulsa keluaran dari pengendali motor stepper (b) penerapan pulsa pengendali pada
motor stepper dan arah putaran yang bersesuaian.
Arah putaran motor dapat diukur dengan mengatur kondisi logika
masukan pada pena 13 dari IC 74LS76. Jika diterapkan logika 0, maka motor akan
berputar berlawanan dengan arah jarum jam (counter clck wise). Sedangkan jika
diterapkan logika 1, maka motor akan berputar dengan arah sesuai dengan arah
jarum jam (clock wise). Gambar 3.8.a di atas adalah contoh bentuk pulsa keluaran
yang menggerakan motor stepper pada arah sesuai dengan jarum jam (clock
wise) .
Kecepatan motor di tentukan oleh frekuensi masukan clock yang
berbentuk gelombang persegi empat. Pulsa clock ini dibangkitkan oleh rangkaian
osilator pembangkit pulsa berbasis IC timer 555. Berikut ini adalah rangkaian
pembangkit pulsa clock berbasis IC 555.
Gambar 3.13. Skema rangkaian pembangkit pulsa clock berbasis IC 555
49

Rangkaian pada gambar 3.13. di atas adalah rangkaian berbasis IC 555
yang bekerja pada mode stabil. Dalam mode ini, rangkaian bekerja sebagai osilator
pembangkit pulsa/gelombang. Rangkaian di atas akan membangkitkan pulsa
berbentuk persegi empat pada keluarannya (pena 3) secara periodik.
Gambar 3.14. Bentuk gelombang keluaran rangkaian pembangkit pulsa (osilator)
Pulsa di atas memiliki frekuensi dan periode yang konstan. Periode dari
satu gelombang penuh adalah Tt (Time total). Th (Time high) adalah periode sinyal
nol atau rendah. Periode gelombang keluaran tersebut ditentukan oleh VR1, VR2,
R1, R2 dan C1. Kapasitor C2 berfungsi sebagai penstabil rangkaian.
Jadi pada sistem ini motor stepper dapat digerakkan pada kecepatan
antara 2,127 rpm hingga 127,323 rpm. Dalam penerapannya pada sistem Triaxial,
VR1 pada rangkaian osilator Gambar 3.13 diatur tahanannya hingga di peroleh
kecepatan yang sesuai. Untuk dapat menghasilakn dua kecepatan, maka di
gunakan dua buah tahanan variabel (VR1dan VR2). Masing-masing tahanan
variabel di atur pada harga tahanan yang berbeda. Untuk harga tahanan yang lebih
kecil akan dihasilkan pula clock yang lebih tinggi frekuensinya sehingga kecepatan
motor stepper lebih tinggi. Untuk berpindah di antara dua kecepatan di gunakan
relay untuk memindahkan terminal R1 ke VR1 atau VR2. Jika relay off, maka
terminal R1 terhubung ke terminal VR1 sedangkan jika relay on, maka terminal R1
terhubung ke terminal VR2.
Motor stepper umunya memerlukan arus listrik yang relatif besar yaitu
antara 1 hingga 2 A. Untuk itu keluaran dari pengendali motor stepper perlu
dikuatkan sehingga dapat mengalirkan arus yang besar. Penguat tersebut dapat di
50
anggap sebagai solid state switch karena hanya menghasilkan sinyak tinggi dan
rendah (1 dan 0). Berikut ini adalah skema rangkaian solid state switch :
Gambar 3.15. Skema rangkain solid state switch
Pada rangkaian di atas (gambar 3.15) digunakan transistor bipolar (BJT)
tipe TIP31 dan di susun sebagai open collector switch. Transistor TIP31 adalah
tergolong transistor daya menengah yang mampu mengalirkan arus puncak hingga
5 A. Transistor-transistor ini harus dilengkapi oleh lempengan pendingin dari
aluminium untuk mengurangi panas yang terjadi akibat besarnya arus yang
mengalir. L1-L4 adalah lilitan (wound) dalam motor stepper. Dioda D1-D4 berfungsi
sebagai pelindung rangkaian dari tegangan tinggi (back EMF) yang mungkin timbul
dari lilitan motor stepper.
Keluaran dari rangkaian pengendali motor stepper (phase1 – phase 4)
dihubungkan kemasukan dari empat transistor tersebut melalui R1 – R2. Jika
masukan bernilai sinyal rendah, maka transistor akan berada pada keadaan cut-off
sehingga arus dan lilitan motor stepper tidak mengalir. Jika masukan bernilai tinggi
(d iatas tegangan ambang transistor), maka transistor akan on sehingga tegangan
antara kolektor dengan emitor (VCE) turun dan arus dapat mengalir ke tanah
(ground), dengan begitu motor stepper berputar. Jika sinyal keluaran dari
pengendali motor stepper berbentuk seperti gambar 3.12.a, maka L1, L2, L3 dan L4
51

akan di aliri arus secara berurutan. Dengan begitu rotor dari motor stepper akan
berputar sesuai dengan arah urutan sinyal pada gambar 3.12.b.
3.5 Aplikasi Motor StepperMotor stepper banyak digunakan untuk aplikasi-aplikasi yang biasanya
cukup menggunakan torsi yang kecil, seperti untuk menggerak piringan disket atau
piringan CD. Dalam hal kecepatan, kecepatan motor stepper cukup cepat jika
dibandingkan dengan motor DC. Motor stepper merupakan motor DC yang tidak
memiliki komutator. Pada umumnya motor stepper hanya mempunyai kumparan
pada statornya sedangkan pada bagian rotornya merupakan permanen magnet.
Dengan model motor seperti ini maka motor stepper dapat diatur posisinya pada
posisi tertentu dan/atau berputar kearah yang diinginkan, seperti jarum jam atau
sebaliknya.
Kecepatan motor stepper pada dasarnya di tentukan oleh kecepatan
pemberian data pada komutatornya.. Semakin cepat data yang diberikan maka
motor stepper akan semakin cepat pula berputarnya. Pada kebanyakan motor
stepper kecepatannya dapat diatur dalam daerah frekuensi audio dan akan
menghasilakn putaran yang cukup cepat.
52
BAB IVMOTOR SERVO
4.1 Pendahuluan
Motor servo sering disebut sebagai motor kendali, adalah motor yang
secara khusus dirancang dan dibuat untuk keperluan sistem kontrol umpan-balik
(feed back). Motor servo mempunyai respon kecepatan tinggi. Motor servo
digunakan untuk mengontrol proses, sistem penjejak dan penuntun, alat remote-
positioning, ada pula digunakan pada rumah tangga seperti mengontrol nyala api
pada kompor dan sejumlah besar aplikasi lain yang serupa. Motor ini dibuat untuk
dapat beroperasi pada tegangan DC maupun AC.
Motor servo adalah sebuah motor dengan sistem kontrol umpan balik
tertutup, dimana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol
yang ada di dalam motor tersebut. Motor ini terdiri dari sebuah motor, serangkaian
gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk
menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor
servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel
motor.
Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan
tidak kontinyu seperti motor DC maupun motor stepper. Namun demikian, untuk
beberapa aplikasi tertentu motor ini dapat dimodifikasi agar bergerak kontinyu.
Motor ini mampu bekerja dalam dua arah (searah atau berlawanan jarum
jam), dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya
53
dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin
kontrolnya.
Gambar 4.1 Motor Servo
Sistem mekanik motor servo memiliki :
3 (tiga) jalur kabel : daya, pentanahan, dan kontrol.
Sinyal kontrol pengendali posisi.
Operasional servo motor dikendalikan oleh sebuah pulsa selebar kurang
lebih 20 ms, dimana lebar pulsa antara 0,5 ms dan 2 ms menyatakan akhir
dari range sudut maksimum.
Konstruksi di dalamnya meliputi internal gear, potensiometer, dan kontrol
umpan balik.
4.2 Motor Servo arus Bolak-Balik
Suatu motor servo arus bolak –balik adalah suatu motor induksi dengan
dua kumparan primer yang satu sama lain saling terpisah dalam posisi magnet
sebesar 900 listrik. Motor ini mempunyai rotor yang berinersia rendah serta
resistansi yang tinggi sehingga memberikan sebuah bentuk kurva kecepatan torsi
yang linier dari kecepatan tanpa beban hingga berhenti. Motor ini didesain untuk
beroperasi dengan tegangan yang dapat diatur dan diaplikasikan pada fasa yang
54

lain yang disebut fasa kontrol. Untuk operasi pada rangkaian satu fasa, sebuah
kapasitor biasanya dihubungkan secara seri dengan fasa tetap.
4.2.1 Bagian-Bagian Penting pada Sebuah Motor Servo
Bagian-bagian penting dari motor servo arus bolak-balik hampir sama
halnya dengan motor kapasitor fasa belah permanen, kecuali bahwa sebuah
kapasitor tidak diperlukan ketika motor dioperasikan dengan tegangan suplai dua
fasa. Terdapat dua kumparan primer yang disebut fasa tetap dan fasa kontrol
yang terpisah satu terhadap yang lain sebesar 90 derajat listrik. Rotor sangkar
yang digunakan pada motor ini umumnya berdiameter kecil untuk menjaga inersia
mekanik serendah mungkin, dan resistansi yang tinggi untuk mendapatkan kurva
kecepatan torsi yang selinier mungkin.
Fasa tetap adalah kumparan dengan dua kawat dan fasa kontrol dapat
berupa kumaparan dua kawat dengan tap di tengah-tengahnya atau kumparan
empat kawat dalam dua bagian, seperti kumparan dua tegangan. Ketika
digunakan dalam rangkaian satu fasa, sebuah kapasitor dihubungkan secara seri
dengan fasa tetap.
Gambar 4.2 Motor Servo AC
Motor ini biasanya dihubungkan dengan peralatan lain seperti :
tachometer, gigi reduksi dan rem.
4.2.2 Cara kerja Motor Servo
55

Sebuah motor servo dapat dioperasikan sebagai motor dua fasa atau
motor kapasitor belah permanen (jika dioperasikan dengan suplai satu fasa)..
Pada kedua operasi tersebut, tegangan pada fasa tetap dijaga konstan dan
tegangan pada fasa kontrol divariasikan.
Sebagai motor dua fasa
Prinsip operasinya mirip dengan motor induksi fasa banyak. Jika tegangan
yang diaplikasi pada fasa tetap dijaga konstan dan tegangan pada fasa kontrolnya
divariasikan, torsi yang dihasilkan untuk sembarang harga slip bervariasi sebagai
pangkat pertama dari tegangan. Namun jika tegangan catu pada kedua fasa
divariasikan, maka torsi pada sembarang slip bervariasi sebagai pangkat dua dari
tegangan.
Sebagai motor satu fasaJika daya dua fasa tidak tersedia, sebuah kapasitor yang sesuai
dihubungkan secara seri dengan fasa tetap seperti ditunjukkan pada gambar di
bawah ini, dan kombinasi ini dihubungkan ke tegangan yang konstan. Keluaran
motor ini dikontrol dengan mengaplikasikan sebuah tegangan variabel pada fasa
kontrol. Untuk sembarang slip, torsi bervariasi kira-kira sama dengan pangkat satu
dari tegangan yang diaplikasikan pada fasa kontrol.
Gambar 4.3 Motor servo satu fasa
4.2.3 Diagram pengawatan dan penandaan terminal pada motor servo
56
Penandaan terminal dan hubungan kawat dengan sebuah fasa kontrol
yang ditap di tengah yang beroperasi pada suplai satu fasa diperlihatkan pada
Gambar 4.4. Cara ini yang digunakan untuk menyesuaikan tegangan yang
diapliasikan ke fasa kontrol. Ketika tegangan ini nol, fasa kontrol harus
dihubungsingkat untuk menjaga motor dari start dan berputar sebagai sebuah
motor fasa tunggal, dalam hal motor ini diberikan pemindahan fasa yang tiba-tiba.
Untuk operasi dua fasa, hubungan adalah sama dengan yang dibahas di atas,
kecuali bahwa kapasitor dihilangkan pada saat fasa tetap dihubungkan ke salah
satu fasa suplai dan fasa kontrol terhadap yang lainnya melalui peralatan
penyesuaian tegangan.
Gambar 4.4 Skema Diagram Pengawatan Motor Servo
4.3 Motor servo bolak-balik yang mempunyai peredamMotor servo umumnya sudah mempunyai sifat peredaman yang cukup
untuk beberapa penggunaan, namun untuk penggunaan tertentu, peredam
tambahan harus diberikan. Peredam tambahan ini dalam bentuk peredam
kekentalan, peredam inersia atau peredam tachometer. Kebanyakan dari efek
peredam ini di sebabkan oleh tegangan tachometer yang dimasukkan kedalam
sistem kontrol.
57

Di bawah ini adalah rangkaian sebuah tachometer yang lengkap, dimana
pada rangkaian ini didasarkan atas sebuah fototransistor pick-off dan sebuah IC
555 yang merupakan IC yang dioperasikan pada rangkaian nonstabil.
Gambat 4. Rangkaian lengkap sebuah tachometer
4.4 Karakteristik Capaian
Ada karakteristik capaian tertentu yang umum untuk motor konvensional
yang berlaku untuk motor servo, yaitu :
1. Kecepatan tanpa beban
Kecepatan tanpa beban pada umumnya dinyatakan dalam rpm dan ditandai
oleh tidak adanya beban dishaft motor.
2. Tenaga Putaran
Tenaga putaran rotor yang terkunci pada umumnya dinyatakan dalam inci-ons.
Jika itu dinyatakan dalam g-cm, maka dibagi dengan 72 untuk memperoleh
tenaga putaran di dalam inci-ons.
58
3. Kelembaman Rotor
Ini adalah kelembaman dari momen rotasi pada batang dan pada umumnya
dinyatakan dalam g-cm2 untuk motor arus bolak-balik dan dalam g-cm-s2 untuk
motor searah. Jika dinyatakan dalam oz-in2, maka harus dikalikan dengan 182,9
untuk memperoleh momen kelembaman itu dalam g-cm2.
4. Akselerasi teoritis
Ini adalah akselerasi pada saat motor dalam keadaan berputar, yang dinyatakan
radian per detik kuadrat, atau rad/s2 itu dihitung sebagai berikut :
Akselerasi = stalltorque
inertia X 70,620
Dimana jika tenaga putaran dinyatakan dalam inci-ons dan momen lemban
dalam g-cm2.
5. Tetapan-waktu mekanis
Ini adalah waktu untuk rotor dapat beakselerasi dari kondisi berputar hingga
mencapai 63,2 % dari kondisi tanpa beban dengan tegangan penuh yang
berasal dari fasa kontrol, tanpa adanya beban luar. Hal ini biasanya dinyatakan
dalam second atau miliseond. Torsi dianggap menurun secara linier dari
kecepatan nol hingga kecepatan tanpa beban, yang menyebabkan kecepatan
motor bertambah berbanding lurus dengan waktunya.
Tetapan waktu mekanis ini didapatkan dari persamaan :
Tetapan_Waktu_Mekanis = Intertia X kec . tanpabebanX 1,485
Stal ltorqueX 1.000.000
6. Tetapan waktu balik.
Ini adalah waktu yang diperlukan dari kecepatan tanpa beban dalam satu arah
untuk 63,2 persen kecepatan tanpa beban dalam arah berlawanan, ketika
tegangan fasa kontrol tiba-tiba dibalikkan sebesar 180 derajat. Pada kondisi ini
59
tidak ada momen inersia atau beban eksternal. Besarnya kira-kira 1,7 kali
tetapan waktu mekanis.
4.5 Jenis-jenis Motor Servo
Motor servo terbagi dalam dua jenis, yaitu:
Motor Servo Standar 1800
Motor servo jenis ini hanya mampu bergerak dua arah (searah dan
berlawanan jarum jam) dengan defleksi masing-masing sudut mencapai 900
sehingga total defleksi sudut dari kanan – tengah – kiri adalah 1800.
Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (searah dan berlawanan
jarum jam) tanpa batasan defleksi sudut putar, atau dengan kata lain dapat
berputar secara kontinyu.
DAFTAR PUSTAKA
60
Cyne, Veinott G; Martin E. Joseph, 1987, Fractional and Subfractional Horse Power
, Mc. Graw Hill International Edition, Singapore.
Dunia Listrik, Motor Listrik AC Satu Fasa, http://duialistrik.blogspot.com/2009/04/motor
listrik-ac-satu-fasa.htlm.
Sen, P.C, Principles of Electric Machines and Power Electronics, John Wiley & Sons,
Singapore
Wildi, Theodore, 1981, Electric Mchines and Power System, Prentice Hall
Internasional, Inc. USA
Zuhal, 1980, Dasar Tenaga Listrik, ITB Bandung.
http://www.energyefficyencyasia.org/docs/ee_modules/indo/Chapter%20-%20Electric
%20motors%20(Bahasa%20Indonesia).pdf
61