Modul Prakt Akustik Vibrasi D3 2013
14
PETUNJUK PRAKTIKUM INSTRUMENTASI AKUSTIK DAN VIBRASI LABORATORIUM REKAYASA AKUSTIK DAN FISIKA BANGUNAN JURUSAN TEKNIK FISIKA FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 2013
-
Upload
rio-ananda-putra -
Category
Documents
-
view
121 -
download
5
description
sdsadsdsdssdsadsddssadsdsadadsadsad
Transcript of Modul Prakt Akustik Vibrasi D3 2013
PETUNJUK PRAKTIKUM
INSTRUMENTASI AKUSTIK DAN VIBRASI
LABORATORIUM REKAYASA AKUSTIK DAN FISIKA BANGUNAN
JURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2013
Sumber
bunyi
r
R
PERCOBAAN P-1 TINGKAT TEKANAN BUNYI (TTB) FUNGSI JARAK
LATAR BELAKANG
Dalam peristiwa sehari-hari telah diketahui bahwa semakin jauh seseorang dari orang lain
yang memanggilnya, maka semakin lemah suara yang didengarnya. Oleh karena itu bila
kita memanggil orang yang posisinya sangat jauh dari kita, maka kita harus memperkeras
suara kita (berteriak). Ini berarti bahwa tingkat tekanan bunyi semakin berkurang dengan
bertambahnya jarak dari sumbernya. Berapakah pengurangan tingkat tekanan bunyi
dengan bertambahnya jarak dari sumber bunyi ?. Prinsip pengurangan tingkat tekanan
bunyi terhadap jarak ini akan dimanfaatkan untuk merancang akustik suatu bangunan
misalnya masjid dan teater.
TUJUAN
1. Mahasiswa memahami cara menggunakan intrumentasi pengukur bunyi (tingkat
tekanan bunyi)
2. Membuktikan teori bahwa Tingkat Tekanan Bunyi (TTB) akan berkurang 6 dB
bila jarak dari sumber bunyi bertambah menjadi 2 x.
TEORI
Sumber bunyi titik mempunyai pola penyebaran gelombang berbentuk bola, sehingga
intensitas gelombang bunyi dapat dituliskan :
Intensitas,
dengan W = daya bunyi Watt, merupakan karakteristik sumber bunyi
d = jarak, dan 4 d2 adalah luas bola dengan jari-jari d
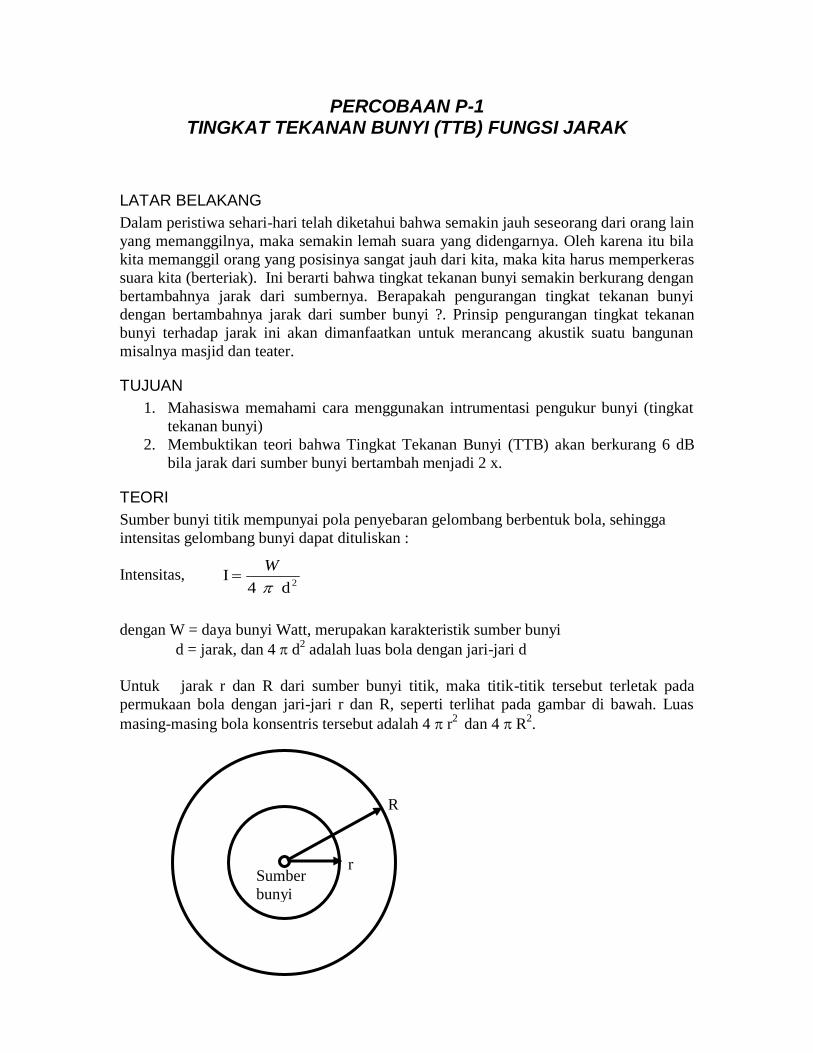
Untuk jarak r dan R dari sumber bunyi titik, maka titik-titik tersebut terletak pada
permukaan bola dengan jari-jari r dan R, seperti terlihat pada gambar di bawah. Luas
masing-masing bola konsentris tersebut adalah 4 r2 dan 4 R
2.
2d 4 I
W

Pada jarak d = r, Tingkat Tekanan Bunyinya = Lpr
Pada jarak d = R, Tingkat Tekanan Bunyinya = LpR
Karena dan maka
Ir dan IR = Intensitas pada jarak r dan R dari sumber.
Dari definisi Tingkat teknan bunyi dan intensitas bunyi pada Bab I, maka dapat ditulis :
dan
maka :
Kalau R = 2r, maka
sehingga
LpR = Lpr - 6 dB
Jadi setiap penambahan dua kali jarak, tingkat tekanan bunyi berkurang sebesar 6 dB,
untuk sumber bunyi yang pola penyebarannya berbentuk bola.
Pengurangan tersebut akan menjadi lebih dari 6 dB bila disekitar sumber bunyi terdapat
rumput-rumputan, semak-semak atau penghalang lainnya.
ALAT-ALAT YANG DIPERGUNAKAN
1. Sound Level Meter (alat ukur tingkat tekanan bunyi)
2. Roll meter
3. Laptop
4. Speaker aktif
5. sumber bunyi (berupa file untuk dimainkan di laptop/PC)
2
2
R
r
r
R
I
I
2rr 4
I
W
ref
r
rpI
I log 10 L
ref
R
RpI
I log 10 L
R
r
RprpI
I log 10 L - L
2
2
r
R log 10
r
R log 20 LP - LP Rr
63010,0202log20r
2r log 20 L - L pRpr x
2RR 4
I
W
CARA MELAKUKAN PERCOBAAN
1. Rangkai peralatan seperti pada gambar 1.
2. Copilah file ”sumber bunyi.mp3” pada laptop atau PC yang akan digunakan
sebagai percobaan.
3. Mainkan file ”sumber bunyi.mp3” pada laptop/PC dengan software
Winamp/window media player/software lainnya, dengan mode looping, sehingga
akan berbunyi terus menerus tanpa henti.
4. Ukur tingkat tekanan bunyi pada jarak 1 meter dari sumber bunyi (speaker aktif),
dengan menggunakan Sound Level Meter (SLM)
5. Ulangi langkah 3. untuk jarak 2 meter, 3 meter, 4 meter, 5 meter, 6 meter, 7
meter, 8 meter, 10 meter, 12 meter, dan16 meter.
Gambar 1. : Rangkaian peralatan
percobaan P-1
TUGAS LAPORAN RESMI
1. Buatlah grafik TTB fungsi jarak, mulai jarak 1 m, 2 m, 3 m, dst sampai 16 m.
Apakah grafiknya merupakan fungi linier (TTB berbanding lurus dengan jarak) ?.
2. Buatlah grafik TTB fungsi jarak, untuk jarak 1 m, 2 m, 4 m, 8 m, dan 16 m.
Apakah terbukti bahwa dengan bertambahnya jarak menjadi 2x, TTB nya
berkurang 6 dB, seperti yang tertulis dalam teori. Apakah penyebabnya ?.
PERCOBAAN P-2 VIBRASI dan JENIS KERUSAKAN POMPA AIR
2.1 Pengertian Getaran
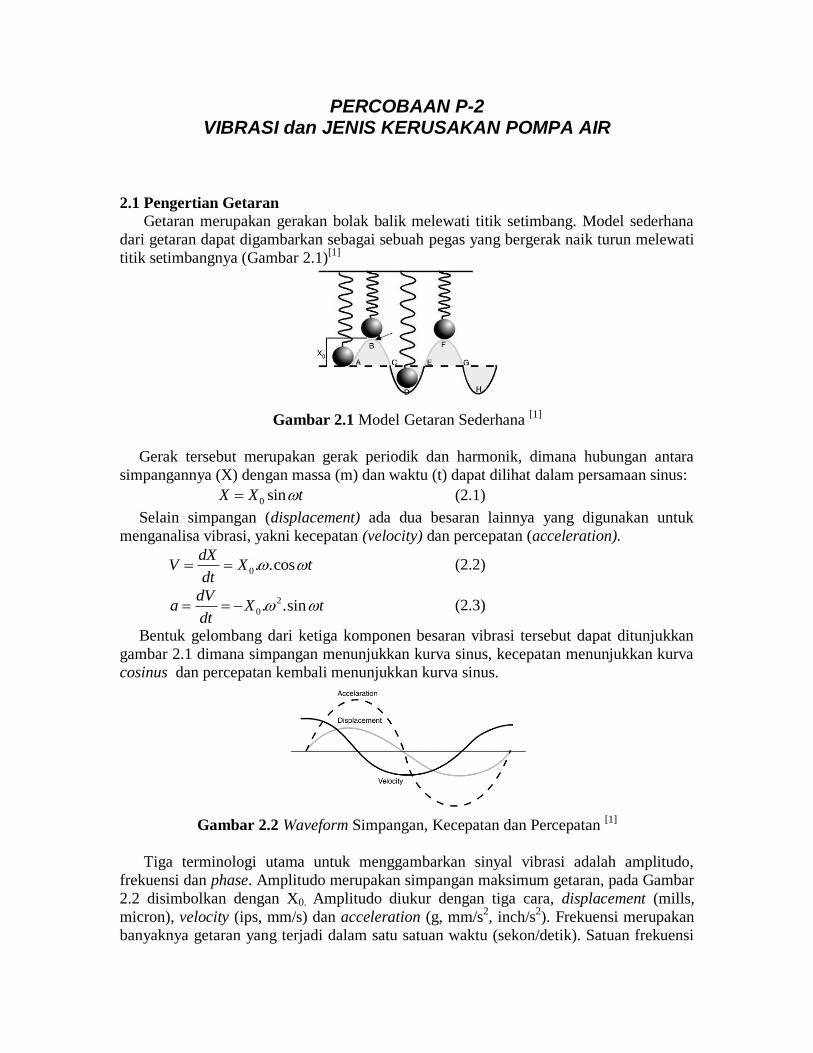
Getaran merupakan gerakan bolak balik melewati titik setimbang. Model sederhana
dari getaran dapat digambarkan sebagai sebuah pegas yang bergerak naik turun melewati
titik setimbangnya (Gambar 2.1)[1]
Gambar 2.1 Model Getaran Sederhana
[1]
Gerak tersebut merupakan gerak periodik dan harmonik, dimana hubungan antara
simpangannya (X) dengan massa (m) dan waktu (t) dapat dilihat dalam persamaan sinus:
0 sinX X t (2.1)
Selain simpangan (displacement) ada dua besaran lainnya yang digunakan untuk
menganalisa vibrasi, yakni kecepatan (velocity) dan percepatan (acceleration).
0. .cosdX
V X tdt
(2.2)
2
0. .sindV
a X tdt
(2.3)
Bentuk gelombang dari ketiga komponen besaran vibrasi tersebut dapat ditunjukkan
gambar 2.1 dimana simpangan menunjukkan kurva sinus, kecepatan menunjukkan kurva
cosinus dan percepatan kembali menunjukkan kurva sinus.
Gambar 2.2 Waveform Simpangan, Kecepatan dan Percepatan
[1]
Tiga terminologi utama untuk menggambarkan sinyal vibrasi adalah amplitudo,
frekuensi dan phase. Amplitudo merupakan simpangan maksimum getaran, pada Gambar
2.2 disimbolkan dengan X0. Amplitudo diukur dengan tiga cara, displacement (mills,
micron), velocity (ips, mm/s) dan acceleration (g, mm/s2, inch/s
2). Frekuensi merupakan
banyaknya getaran yang terjadi dalam satu satuan waktu (sekon/detik). Satuan frekuensi
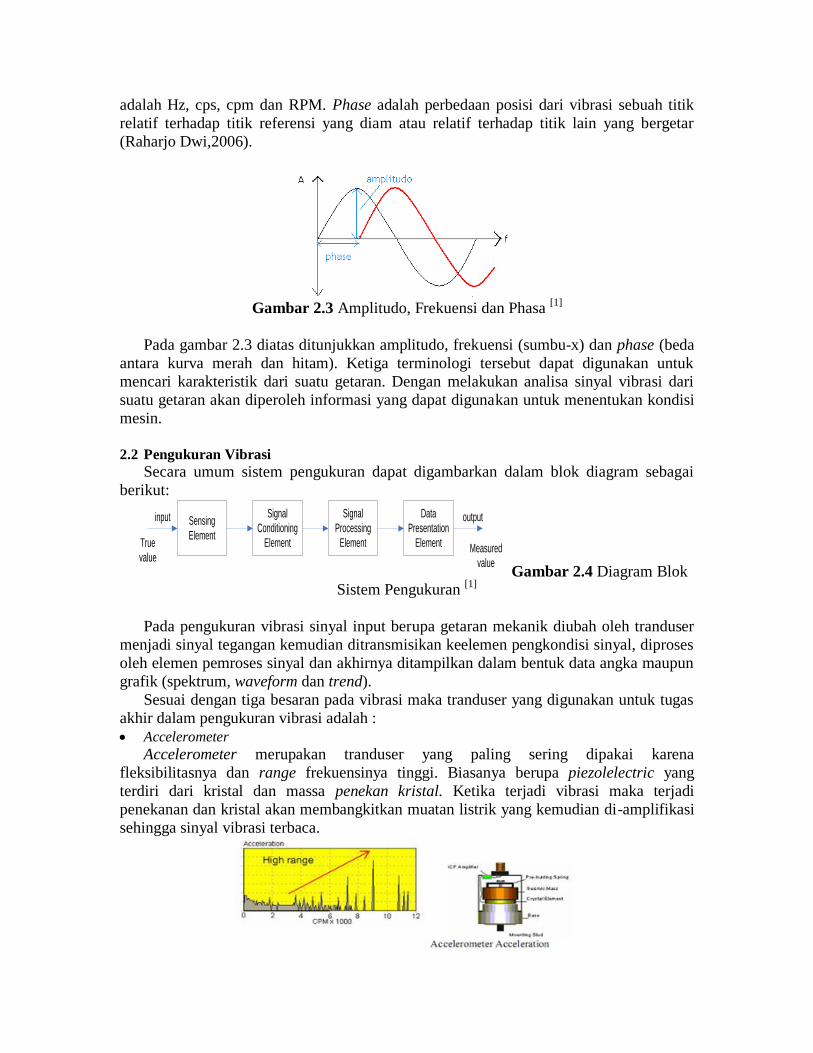
adalah Hz, cps, cpm dan RPM. Phase adalah perbedaan posisi dari vibrasi sebuah titik
relatif terhadap titik referensi yang diam atau relatif terhadap titik lain yang bergetar
(Raharjo Dwi,2006).
Gambar 2.3 Amplitudo, Frekuensi dan Phasa
[1]
Pada gambar 2.3 diatas ditunjukkan amplitudo, frekuensi (sumbu-x) dan phase (beda
antara kurva merah dan hitam). Ketiga terminologi tersebut dapat digunakan untuk
mencari karakteristik dari suatu getaran. Dengan melakukan analisa sinyal vibrasi dari
suatu getaran akan diperoleh informasi yang dapat digunakan untuk menentukan kondisi
mesin.
2.2 Pengukuran Vibrasi
Secara umum sistem pengukuran dapat digambarkan dalam blok diagram sebagai
berikut:
Sensing
Element
Signal
Conditioning
Element
Signal
Processing
Element
Data
Presentation
Element
input output
True
valueMeasured
valueGambar 2.4 Diagram Blok
Sistem Pengukuran [1]
Pada pengukuran vibrasi sinyal input berupa getaran mekanik diubah oleh tranduser
menjadi sinyal tegangan kemudian ditransmisikan keelemen pengkondisi sinyal, diproses
oleh elemen pemroses sinyal dan akhirnya ditampilkan dalam bentuk data angka maupun
grafik (spektrum, waveform dan trend).
Sesuai dengan tiga besaran pada vibrasi maka tranduser yang digunakan untuk tugas
akhir dalam pengukuran vibrasi adalah :
Accelerometer
Accelerometer merupakan tranduser yang paling sering dipakai karena
fleksibilitasnya dan range frekuensinya tinggi. Biasanya berupa piezolelectric yang
terdiri dari kristal dan massa penekan kristal. Ketika terjadi vibrasi maka terjadi
penekanan dan kristal akan membangkitkan muatan listrik yang kemudian di-amplifikasi
sehingga sinyal vibrasi terbaca.

Gambar 2.5 Accelerometer[1]
Elemen pengkondisi sinyal (signal conditioning) pada sistem pengukuran vibrasi
berupa amplifier yang menguatkan sinyal agar dapat diproses oleh signal processing.
Sepuluh tahun yang lalu, accelerometer masih menggunakan external amplifier, namun
saat ini kebanyakan amplifier sudah tersedia dalam tranduser itu sendiri, disebut
internally amplified Accelerometer atau integrated circuit piezoelectric (ICP).[1]
2.3 Pengambilan Data Menggunakan Accelerometer
Tranduser getaran dipasang pada bagian-bagian mesin yang cukup kaku untuk
menghindari efek resonansi lokal bagian tersebut. Pengambilan data-data dengan alat
tranduser tersebut harus terlebih dahulu mengetahui bagian mana dari mesin tersebut
yang paling tepat untuk pengukuran vibrasi. Tempat yang paling tepat tersebut adalah
pada tempat yang dekat dengan sumber vibrasi, misalnya pada kerusakan bearing maka
penempatan tranduser diletakkan pada bearing caps (rumah bearing ). Pengambilan
data vibrasi dilakukan dengan dua posisi yaitu dengan posisi axial dan posisi radial.
Pengambilan data secara axial adalah menempatkan alat tranduser pada arah axial atau
searah dengan poros. Cara radial sendiri terbagi menjadi 2 cara, yaitu:
Horizontal pengukuran secara horizontal dengan cara meletakkan alat tranduser secara horizontal
misalnya pada bagian atas pompa. Dari pengukuran ini dapat diketahui amplitudo yang
paling tinggi.
Vertikal Pengambilan data secara vertikal adalah dengan menempatkan alat tranduser pada posisi
vertikal atau berbanding 90o dengan arah horizontal pada pompa.
Pengambilan data pada tiga sumbu berfungsi untuk melihat kondisi vibrasi pada
masing-masing sumbu, karena disetiap sumbu mempunyai vibrasi yang berbeda. Pada
setiap kondisi mesin dapat ditentukan karakteistik kerusakan dengan melihat sinyal
vibrasi dari masing-masing sumbu pengukuran.
Gambar 2.6 Keterangan Tata Cara Pengambilan Data Menggunakan Tranduser Getaran [1]
Keterangan dari gambar 2.6 di atas yaitu gambar A adalah posisi axial, B adalah
posisi vertikal, C adalah posisi horizontal dan D adalah posisi shaft.
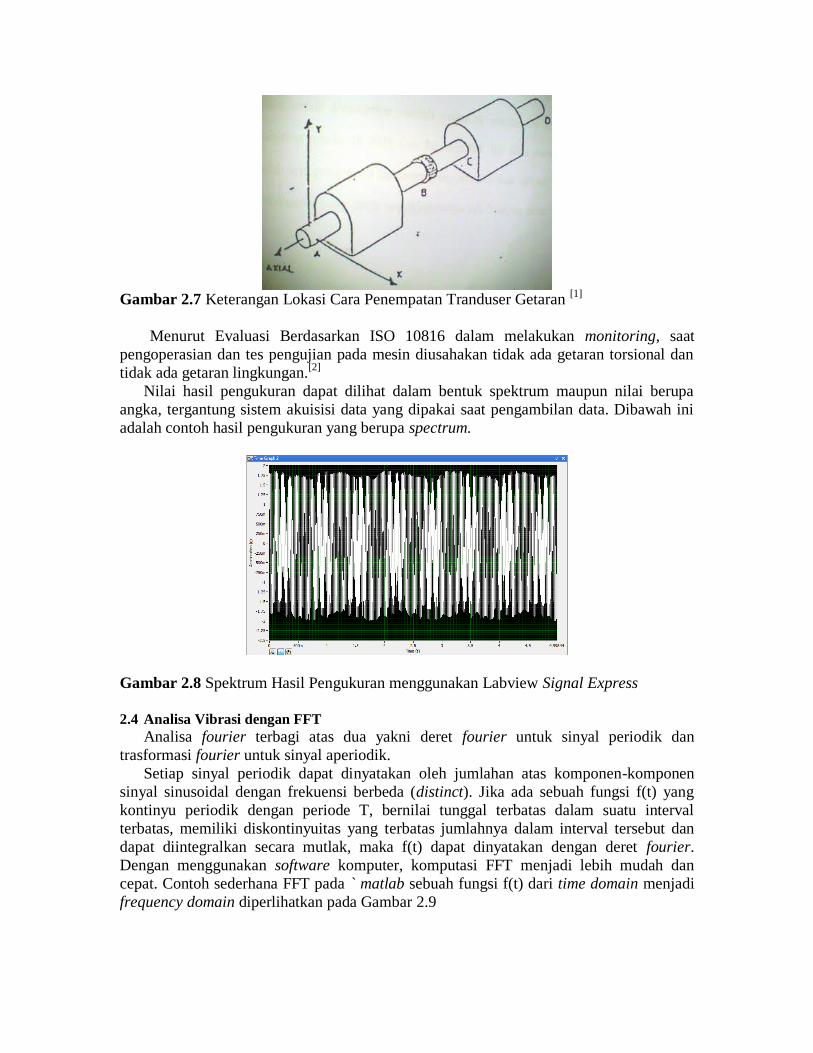
Gambar 2.7 Keterangan Lokasi Cara Penempatan Tranduser Getaran
[1]
Menurut Evaluasi Berdasarkan ISO 10816 dalam melakukan monitoring, saat
pengoperasian dan tes pengujian pada mesin diusahakan tidak ada getaran torsional dan
tidak ada getaran lingkungan.[2]
Nilai hasil pengukuran dapat dilihat dalam bentuk spektrum maupun nilai berupa
angka, tergantung sistem akuisisi data yang dipakai saat pengambilan data. Dibawah ini
adalah contoh hasil pengukuran yang berupa spectrum.
Gambar 2.8 Spektrum Hasil Pengukuran menggunakan Labview Signal Express
2.4 Analisa Vibrasi dengan FFT
Analisa fourier terbagi atas dua yakni deret fourier untuk sinyal periodik dan
trasformasi fourier untuk sinyal aperiodik.
Setiap sinyal periodik dapat dinyatakan oleh jumlahan atas komponen-komponen
sinyal sinusoidal dengan frekuensi berbeda (distinct). Jika ada sebuah fungsi f(t) yang
kontinyu periodik dengan periode T, bernilai tunggal terbatas dalam suatu interval
terbatas, memiliki diskontinyuitas yang terbatas jumlahnya dalam interval tersebut dan
dapat diintegralkan secara mutlak, maka f(t) dapat dinyatakan dengan deret fourier.
Dengan menggunakan software komputer, komputasi FFT menjadi lebih mudah dan
cepat. Contoh sederhana FFT pada ` matlab sebuah fungsi f(t) dari time domain menjadi
frequency domain diperlihatkan pada Gambar 2.9
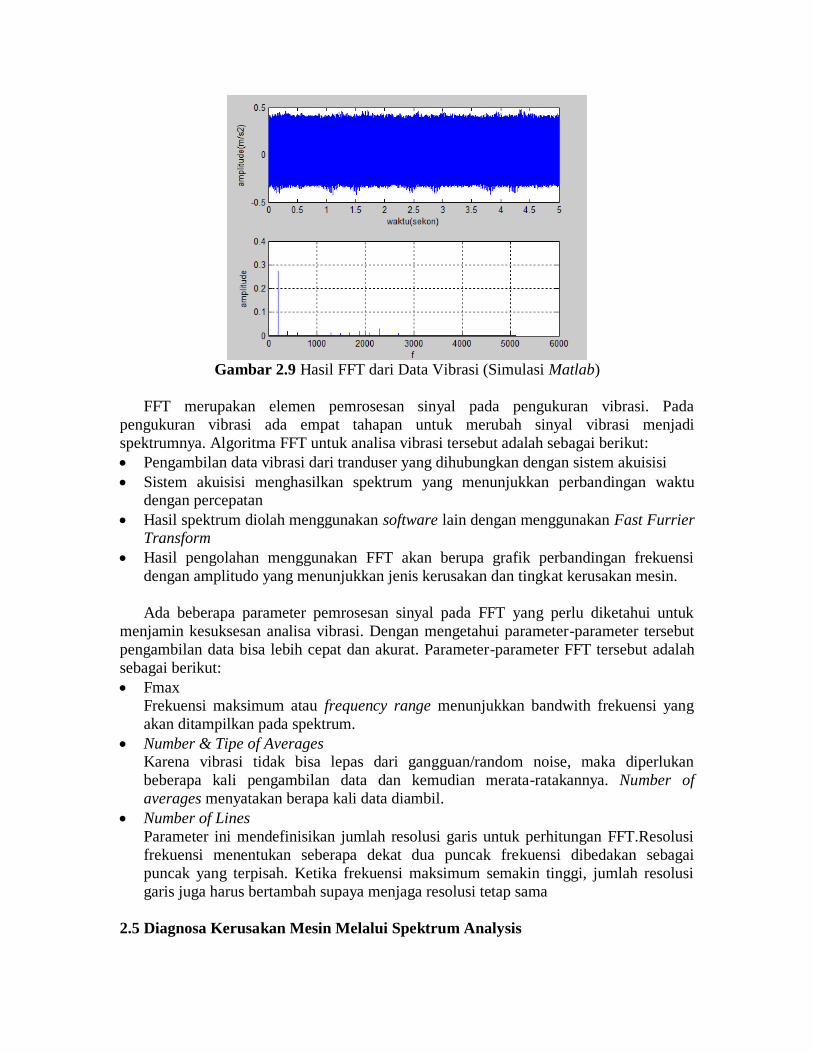
Gambar 2.9 Hasil FFT dari Data Vibrasi (Simulasi Matlab)
FFT merupakan elemen pemrosesan sinyal pada pengukuran vibrasi. Pada
pengukuran vibrasi ada empat tahapan untuk merubah sinyal vibrasi menjadi
spektrumnya. Algoritma FFT untuk analisa vibrasi tersebut adalah sebagai berikut:
Pengambilan data vibrasi dari tranduser yang dihubungkan dengan sistem akuisisi
Sistem akuisisi menghasilkan spektrum yang menunjukkan perbandingan waktu dengan percepatan
Hasil spektrum diolah menggunakan software lain dengan menggunakan Fast Furrier Transform
Hasil pengolahan menggunakan FFT akan berupa grafik perbandingan frekuensi
dengan amplitudo yang menunjukkan jenis kerusakan dan tingkat kerusakan mesin.
Ada beberapa parameter pemrosesan sinyal pada FFT yang perlu diketahui untuk
menjamin kesuksesan analisa vibrasi. Dengan mengetahui parameter-parameter tersebut
pengambilan data bisa lebih cepat dan akurat. Parameter-parameter FFT tersebut adalah
sebagai berikut:
Fmax Frekuensi maksimum atau frequency range menunjukkan bandwith frekuensi yang
akan ditampilkan pada spektrum.
Number & Tipe of Averages Karena vibrasi tidak bisa lepas dari gangguan/random noise, maka diperlukan
beberapa kali pengambilan data dan kemudian merata-ratakannya. Number of
averages menyatakan berapa kali data diambil.
Number of Lines
Parameter ini mendefinisikan jumlah resolusi garis untuk perhitungan FFT.Resolusi
frekuensi menentukan seberapa dekat dua puncak frekuensi dibedakan sebagai
puncak yang terpisah. Ketika frekuensi maksimum semakin tinggi, jumlah resolusi
garis juga harus bertambah supaya menjaga resolusi tetap sama
2.5 Diagnosa Kerusakan Mesin Melalui Spektrum Analysis

Setiap bagian dari pompa atau mesin berputar mempunyai tingkat vibrasi yang
berbeda tergantung pada letaknya dan gaya yang diterima. Tingkat vibrasi inilah yang
bisa dijadikan sebagai pendeteksi keadaan dari suatu kondisi mesin apakah ada kerusakan
atau tidak. Kerusakan umum yang biasa terjadi pada pompa dan mesin-mesin berputar
adalah ketidak-seimbangan atau unbalance, misalingment, kerusakan bearing dan
mechanical loosenes. Kerusakan-kerusakan tersebut dapat dideteksi dari spektrum
vibrasi.
Kerusakan – kerusakan yang sering terjadi pada mesin berputar yaitu :
2.5.1 Unbalance
Unbalance adalah kondisi dimana pusat massa tidak sesumbu dengan sumbu rotasi
sehingga rotor mengalami gaya vibrasi terhadap bearing yang menghasilkan gaya
sentrifugal. Ada beberapa faktor yang menyebabkan terjadinya unbalance yakni:
kesalahan saat proses pemesinan dan assembly, eksentrisitas komponen, adanya kotoran
saat pengecoran, korosi dan keausan, distorsi geometri karena beban termal dan beban
mekanik serta penumpukan material. Karakteristik dari unbalance ini dapat diketehui
dengan adanya amplitudo yang tinggi pada 1 x RPM, seperti yang ditunjukkan gambar
2.9. Tetapi adanya amplitudo pada 1x RPM tidak selalu Unbalance, tanda lainnya adalah
rasio amplitudo antara pengukuran arah horizontal dan vertikal kecil (H/V < 3). Ketika
pada kondisi dominan unbalance, maka getaran radial (Horizontal dan Vertikal) akan
secara normal jauh lebih tinggi dibandingkan axial. Pada pompa normal, getaran
horizontal lebih tinggi dari vertical. Amplitudo di 1x RPM secara normal ≥ 80% dari
amplitudo keseluruhan ketika masalah dipastikan unbalance.
Gambar 2.10 Spektrum Vibrasi Unbalance
[1]
Resonansi kadang – kadang dapat memperbesar efek dari unbalance. Unbalance
juga dapat memberi kontribusi terbesar pada loosness (Aus). Ketika unbalance lebih
domiman daripada masalah yang lain, beda fase antara horizontal dan vertikal sekitar 90˚
(±30˚) pada bearing yang sama. Unbalance pada motor biasanya tetap dan fase yang
berulang di arah radial.
2.5.2 Misalingment
Ketidaklurusan ( misalignment) terjadi ketika frekuensi shaft yang berputar satu kali
putaran atau dapat juga terjadi dua dan tiga kali putaran. Normalnya disebabkan adanya
getaran yang tinggi pada axial dan radial, tetapi tidak selalu tinggi pada axial saja,
khususnya saat kondisi parallel offset lebih mendominasi dibandingkan Angular
misalignment. Menghasilkan getaran lebih besar dari keadaan normal di 2x RPM dimana
dapat terjadi bukan hanya di arah axial tapi juga di radial.
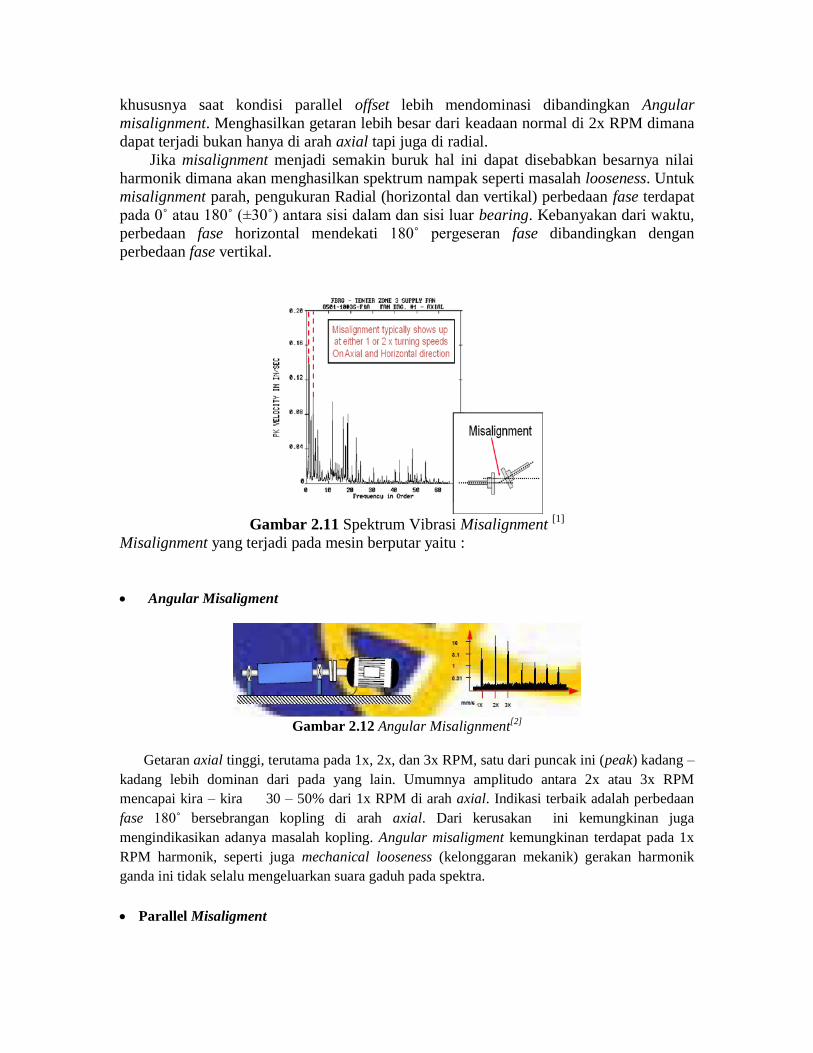
Jika misalignment menjadi semakin buruk hal ini dapat disebabkan besarnya nilai
harmonik dimana akan menghasilkan spektrum nampak seperti masalah looseness. Untuk
misalignment parah, pengukuran Radial (horizontal dan vertikal) perbedaan fase terdapat
pada 0˚ atau 180˚ (±30˚) antara sisi dalam dan sisi luar bearing. Kebanyakan dari waktu,
perbedaan fase horizontal mendekati 180˚ pergeseran fase dibandingkan dengan
perbedaan fase vertikal.
Gambar 2.11 Spektrum Vibrasi Misalignment
[1]
Misalignment yang terjadi pada mesin berputar yaitu :
Angular Misaligment
Gambar 2.12 Angular Misalignment[2]
Getaran axial tinggi, terutama pada 1x, 2x, dan 3x RPM, satu dari puncak ini (peak) kadang –
kadang lebih dominan dari pada yang lain. Umumnya amplitudo antara 2x atau 3x RPM
mencapai kira – kira 30 – 50% dari 1x RPM di arah axial. Indikasi terbaik adalah perbedaan
fase 180˚ bersebrangan kopling di arah axial. Dari kerusakan ini kemungkinan juga
mengindikasikan adanya masalah kopling. Angular misaligment kemungkinan terdapat pada 1x
RPM harmonik, seperti juga mechanical looseness (kelonggaran mekanik) gerakan harmonik
ganda ini tidak selalu mengeluarkan suara gaduh pada spektra.
Parallel Misaligment
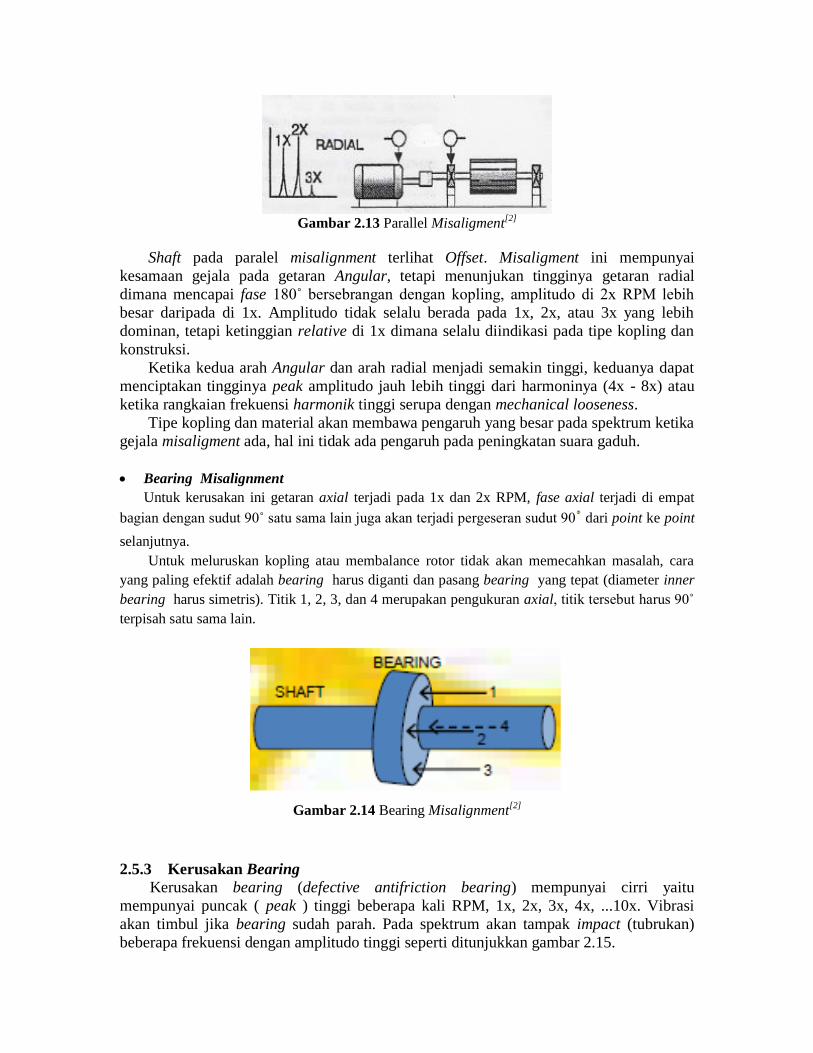
Gambar 2.13 Parallel Misaligment[2]
Shaft pada paralel misalignment terlihat Offset. Misaligment ini mempunyai
kesamaan gejala pada getaran Angular, tetapi menunjukan tingginya getaran radial
dimana mencapai fase 180˚ bersebrangan dengan kopling, amplitudo di 2x RPM lebih
besar daripada di 1x. Amplitudo tidak selalu berada pada 1x, 2x, atau 3x yang lebih
dominan, tetapi ketinggian relative di 1x dimana selalu diindikasi pada tipe kopling dan
konstruksi.
Ketika kedua arah Angular dan arah radial menjadi semakin tinggi, keduanya dapat
menciptakan tingginya peak amplitudo jauh lebih tinggi dari harmoninya (4x - 8x) atau
ketika rangkaian frekuensi harmonik tinggi serupa dengan mechanical looseness.
Tipe kopling dan material akan membawa pengaruh yang besar pada spektrum ketika
gejala misaligment ada, hal ini tidak ada pengaruh pada peningkatan suara gaduh.
Bearing Misalignment
Untuk kerusakan ini getaran axial terjadi pada 1x dan 2x RPM, fase axial terjadi di empat
bagian dengan sudut 90˚ satu sama lain juga akan terjadi pergeseran sudut 90 dari point ke point
selanjutnya.
Untuk meluruskan kopling atau membalance rotor tidak akan memecahkan masalah, cara
yang paling efektif adalah bearing harus diganti dan pasang bearing yang tepat (diameter inner
bearing harus simetris). Titik 1, 2, 3, dan 4 merupakan pengukuran axial, titik tersebut harus 90˚
terpisah satu sama lain.
Gambar 2.14 Bearing Misalignment[2]
2.5.3 Kerusakan Bearing
Kerusakan bearing (defective antifriction bearing) mempunyai cirri yaitu
mempunyai puncak ( peak ) tinggi beberapa kali RPM, 1x, 2x, 3x, 4x, ...10x. Vibrasi
akan timbul jika bearing sudah parah. Pada spektrum akan tampak impact (tubrukan)
beberapa frekuensi dengan amplitudo tinggi seperti ditunjukkan gambar 2.15.
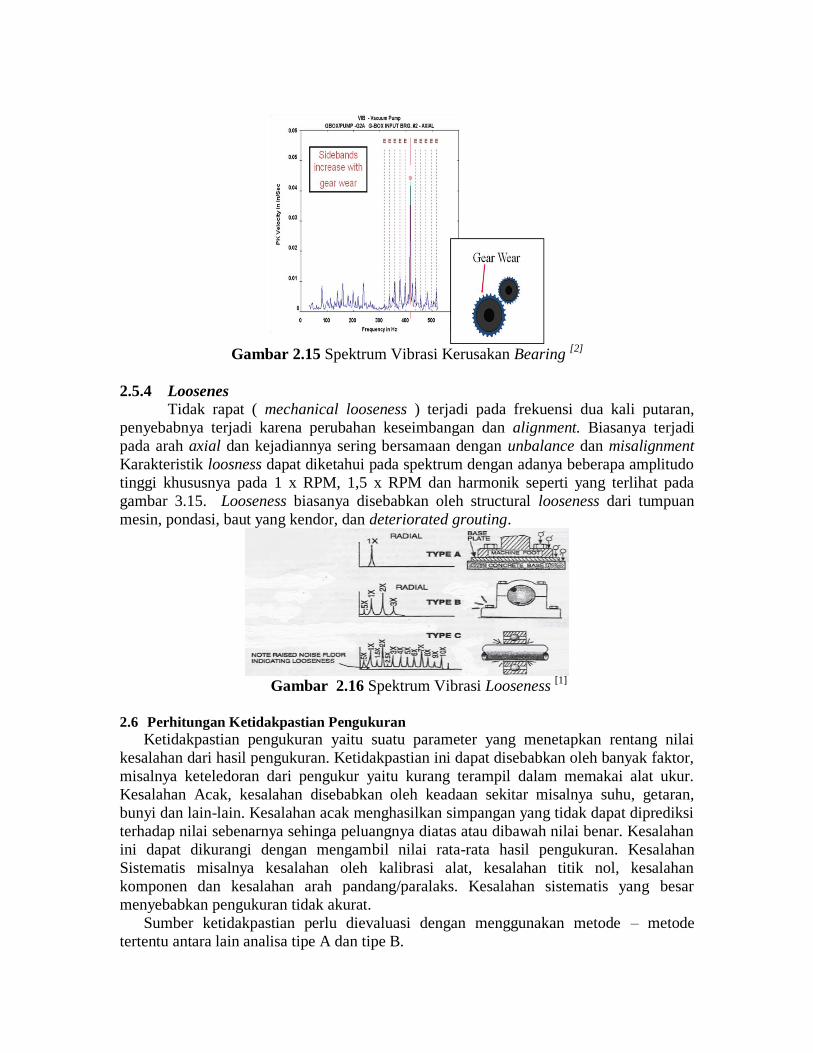
Gambar 2.15 Spektrum Vibrasi Kerusakan Bearing
[2]
2.5.4 Loosenes
Tidak rapat ( mechanical looseness ) terjadi pada frekuensi dua kali putaran,
penyebabnya terjadi karena perubahan keseimbangan dan alignment. Biasanya terjadi
pada arah axial dan kejadiannya sering bersamaan dengan unbalance dan misalignment
Karakteristik loosness dapat diketahui pada spektrum dengan adanya beberapa amplitudo
tinggi khususnya pada 1 x RPM, 1,5 x RPM dan harmonik seperti yang terlihat pada
gambar 3.15. Looseness biasanya disebabkan oleh structural looseness dari tumpuan
mesin, pondasi, baut yang kendor, dan deteriorated grouting.
Gambar 2.16 Spektrum Vibrasi Looseness
[1]
2.6 Perhitungan Ketidakpastian Pengukuran
Ketidakpastian pengukuran yaitu suatu parameter yang menetapkan rentang nilai
kesalahan dari hasil pengukuran. Ketidakpastian ini dapat disebabkan oleh banyak faktor,
misalnya keteledoran dari pengukur yaitu kurang terampil dalam memakai alat ukur.
Kesalahan Acak, kesalahan disebabkan oleh keadaan sekitar misalnya suhu, getaran,
bunyi dan lain-lain. Kesalahan acak menghasilkan simpangan yang tidak dapat diprediksi
terhadap nilai sebenarnya sehinga peluangnya diatas atau dibawah nilai benar. Kesalahan
ini dapat dikurangi dengan mengambil nilai rata-rata hasil pengukuran. Kesalahan
Sistematis misalnya kesalahan oleh kalibrasi alat, kesalahan titik nol, kesalahan
komponen dan kesalahan arah pandang/paralaks. Kesalahan sistematis yang besar
menyebabkan pengukuran tidak akurat.
Sumber ketidakpastian perlu dievaluasi dengan menggunakan metode – metode
tertentu antara lain analisa tipe A dan tipe B.

Analisa tipe A ( ketidakpastian UA) Analisa ketidakpatian tipe A adalah ketidakpastian yang tampak akibat pengulangan
pengukuran dan dihitung dengan metode statistik. Tujuan dari pengukuran ketidakpastian
tipe A ini yaitu untuk melihat seberapa akurat dan presisi data pengukuran yang didapat,
sehingga dapat dipastikan bahwa hasil pengukuran dapat di terima. Dengan mengetahui
jumlah data yang diambil (n), dan dihitung standar deviasi dari hasil pengukuran (σ),
persamaan standar deviasi yaitu:
1
n
DDi , (2.4)
dimana:
Di = koreksi ke – I atau dapat memakai variabel x. Yaitu nilai di tiap pengukuran.
D = rata-rata koreksi yaitu rata-rata dari hasil pengukuran
n = jumlah koreksi, yaitu jumlah data hasil pengukuran
maka persamaan untuk menghitung ketidakpastian UA1 adalah :
nUa
(2.5)
dimana:
σ = standar deviasi hasilmpengukuran
n = jumlah koreksi, yaitu jumlah data hasil pengukuran
ALAT-ALAT YANG DIPERGUNAKAN Adapun peralatan yang digunakan dalam praktikum kali ini adalah:
1. Macam-macam Pompa air
2. Laptop dengan Software Sound and Vibration Assistant dan MatLab
3. DAQ National Instrument
4. Stroboscop
LANGKAH-LANGKAH PRAKTIKUM Adapun langkah-langkah dalam melakukan praktikum ini adalah sebagai berikut:
1. Sambungkan accelerometer ke Laptop
2. Tempelkan accelerometer pada mesin pompa
3. Buka software data logger.
4. Arahkan dan nyalakan stroboscop pada As pompa yang telah ditandai, putar knop
stroboscop sehingga terlihat bahwa As tidak berputar (stasioner) dan catat angka yang
ditunjukkan stroboscop5. Mulai proses data logger
5. Biarkan PC mengambil data selama 5 detik lalu hentikan proses data logger
6. Ulangi urutan no 1 s/d 6 dengan mengganti pompa air lain.
7. Buatlah grafik perbandingan hasil monitoring vibrasi dari tiap pompa dalam domain
8. waktu dan frekuensi
9. Bandingkan grafik dari tiap pompa lalu tuliskan pendapat anda terkait grafik tersebut