Kestabilan - dinus.ac.iddinus.ac.id/repository/docs/ajar/kd-slide-06_file... · Agus Arif 17...
25
Agus Arif 1 Kestabilan Kuliah 6 Kontrol Digital Bab 13 buku-ajar
Transcript of Kestabilan - dinus.ac.iddinus.ac.id/repository/docs/ajar/kd-slide-06_file... · Agus Arif 17...
Agus Arif 1
Kestabilan
Kuliah 6
Kontrol Digital
Bab 13 buku-ajar
Agus Arif 2
Materi
• Pendahuluan• Ketabilan Sistem Digital dlm Bidang-z• Pemodelan & Kestabilan• Selang Pencuplikan utk Kestabilan• Transformasi Bilinear• Kestabilan Sistem Digital dlm Bidang-s
Agus Arif 3
Pendahuluan {1}
• Perbedaan menyolok di antara– sistem kontrol umpan-balik analog– sistem kontrol umpan-balik digital (lih gbr)
adalah efek laju pencuplikan pd tanggapan transien
• Perubahan laju pencuplikan dpt mengubah– Watak tanggapan: overdamped underdampd– Kestabilan: stabil tidak stabil
Agus Arif 4
Pendahuluan {2}
Agus Arif 5
Pendahuluan {3}
• Kestabilan sistem digital dpt ditinjau dr 2 cara-pandang:– bidang-z koordinat polar– bidang-s koordinat rectangular
• Kriteria Routh-Hurwitz dpt diterapkan hanya pd analisis & desain dlm bidang-s
• Transformasi antara bidang-z & bidang-s dpt dilakukan dgn transformasi bilinear
Agus Arif 6
Kestabilan dlm Bidang-z {1}
• Dlm bidang-s, wilayah kestabilan = sisi kiri sumbu imajiner
• Jk fungsi transfer G(s) dpt diubah mjd G(z), wilayah kestabilan dlm bid-z dpt dijabarkan dr definisi z = eTs & s = α + jω :
• Tiap wilayah bidang-s dpt dipetakan mjd wilayah yg sesuai dlm bidang-z:
TeTjTe
eeezTT
TjTjT
ω∠=ω+ω=
==αα
ωαω+α
)sin(cos
)(
Agus Arif 7
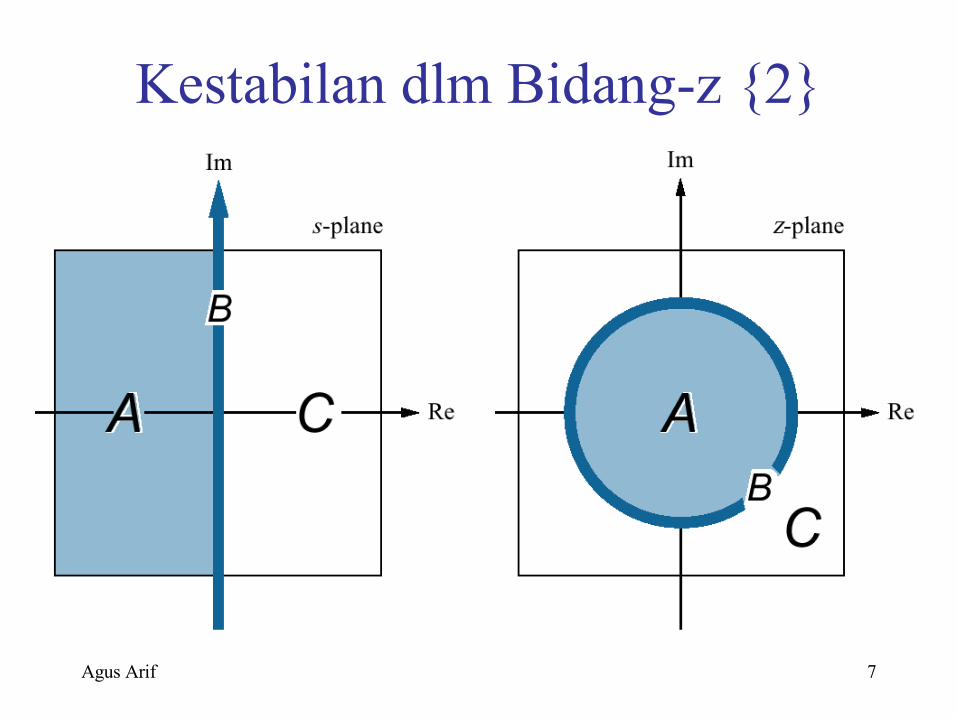
Kestabilan dlm Bidang-z {2}
Agus Arif 8
Kestabilan dlm Bidang-z {3}• Titik2 dgn α > 0 dlm bidang-s titik2 dgn eαT > 1
dlm bidang-z (wilayah C)– sisi kanan sumbu imajiner wilayah di luar lingkaran
satuan
• Titik2 dgn α = 0 dlm bidang-s titik2 dgn eαT = 1 dlm bidang-z (wilayah B)– titik2 pd sumbu imajiner titik2 pd lingkaran satuan
• Titik2 dgn α < 0 dlm bidang-s titik2 dgn eαT < 1 dlm bidang-z (wilayah A)– sisi kiri sumbu imajiner wilayah di dalam lingkaran
satuan
Agus Arif 9
Kestabilan dlm Bidang-z {4}
• Oleh karena itu, sistem kontrol digital disbt– Stabil jk semua pole kalang-tertutup T(z) brada
di dalam lingkaran satuan– Tdk stabil jk ada pole di luar lingkaran satuan
dan/atau ada pole dgn multiplisitas > 1 pada lingkaran satuan
– Marginally stable jk ada pole bermultiplisitas 1 pd lingkaran satuan & semua pole lainnya di dalam lingkaran satuan
Agus Arif 10
Pemodelan & Kestabilan {1}
• Rudal dpt dikontrol scr aerodinamik oleh torka yg dihasilkan dr defleksi permukaan2 kontrol
• Perintah defleksi berasal dr komputer yg menerima data pelacakan & menghitung berdasarkan persamaan2 guidance
Agus Arif 11
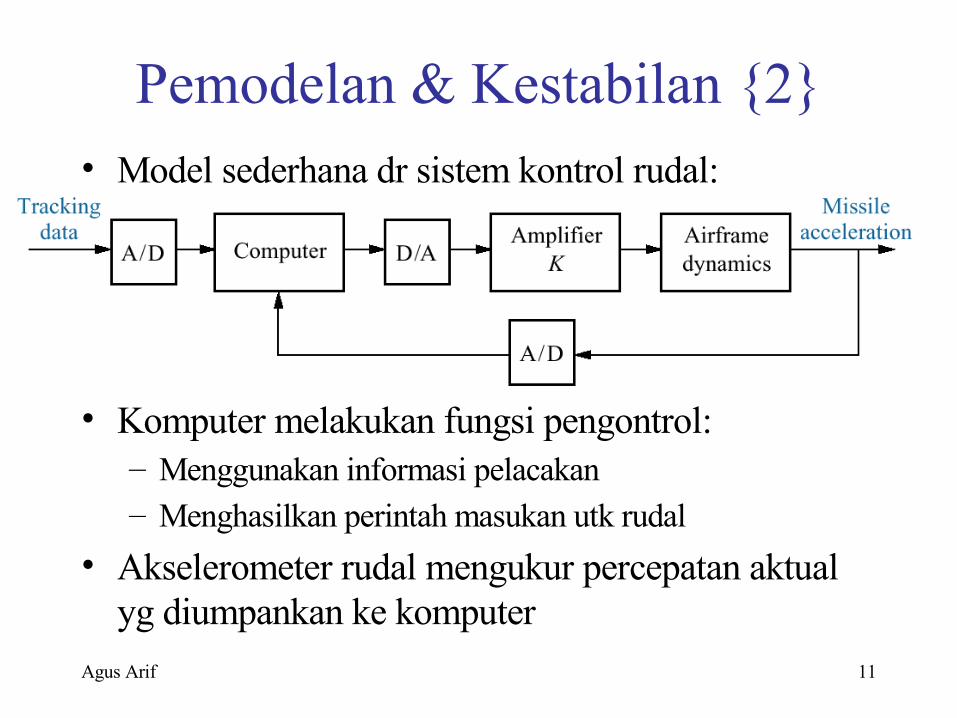
Pemodelan & Kestabilan {2}• Model sederhana dr sistem kontrol rudal:
• Komputer melakukan fungsi pengontrol:– Menggunakan informasi pelacakan– Menghasilkan perintah masukan utk rudal
• Akselerometer rudal mengukur percepatan aktual yg diumpankan ke komputer
Agus Arif 12
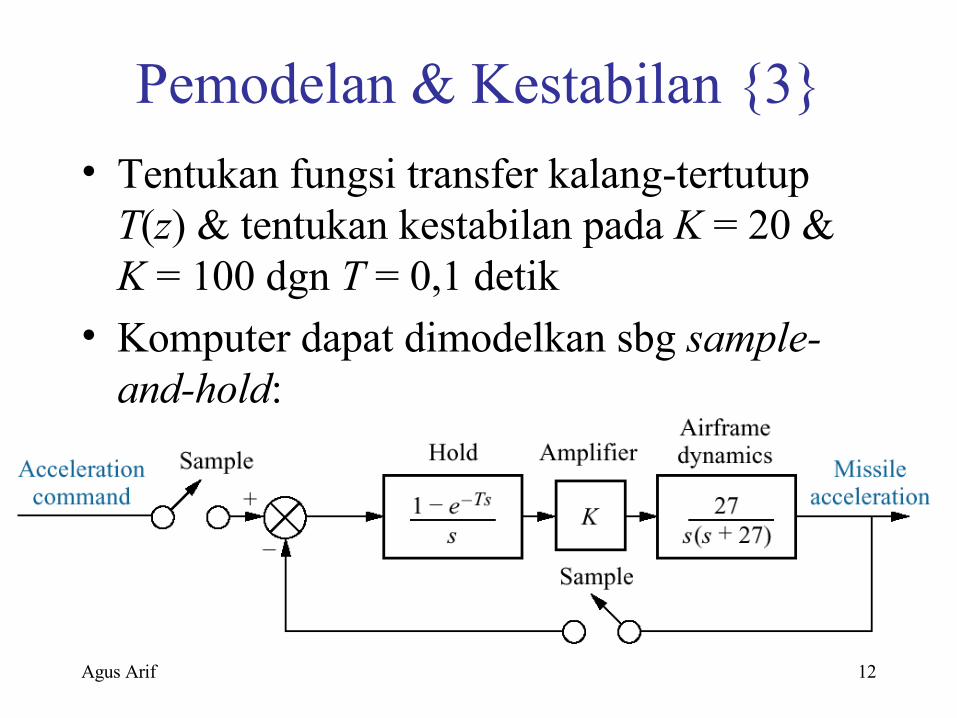
Pemodelan & Kestabilan {3}
• Tentukan fungsi transfer kalang-tertutup T(z) & tentukan kestabilan pada K = 20 & K = 100 dgn T = 0,1 detik
• Komputer dapat dimodelkan sbg sample-and-hold:
Agus Arif 13
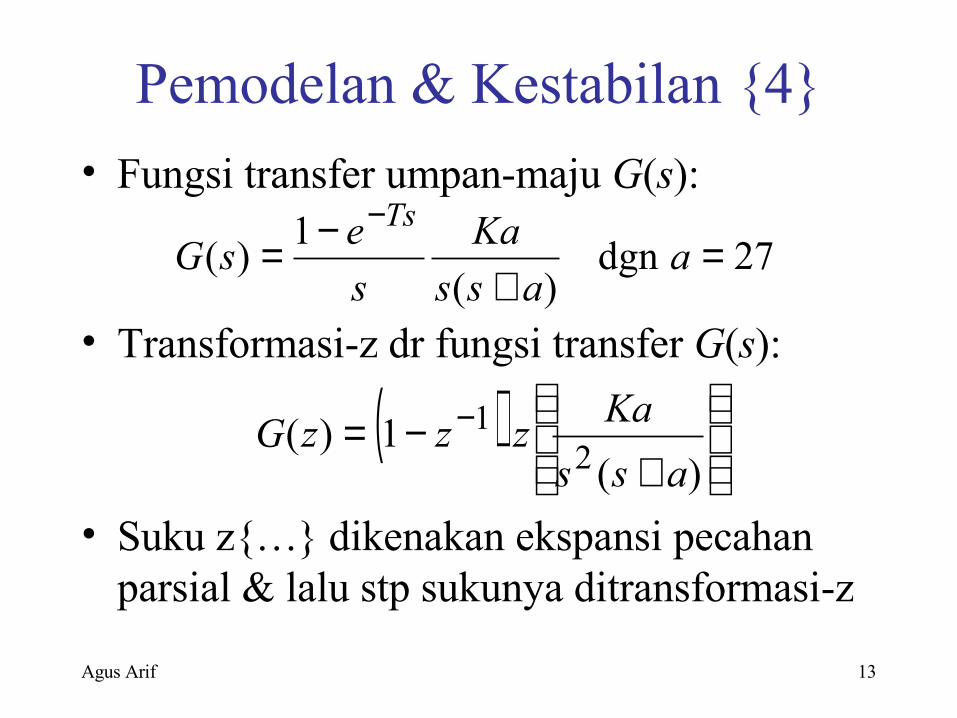
Pemodelan & Kestabilan {4}
• Fungsi transfer umpan-maju G(s):
• Transformasi-z dr fungsi transfer G(s):
• Suku z{…} dikenakan ekspansi pecahan parsial & lalu stp sukunya ditransformasi-z
27dgn)(
1)( =
+−=
−a
ass
Ka
s
esG
Ts
( )
+−= −
)(1)(
21
ass
KazzzG
Agus Arif 14
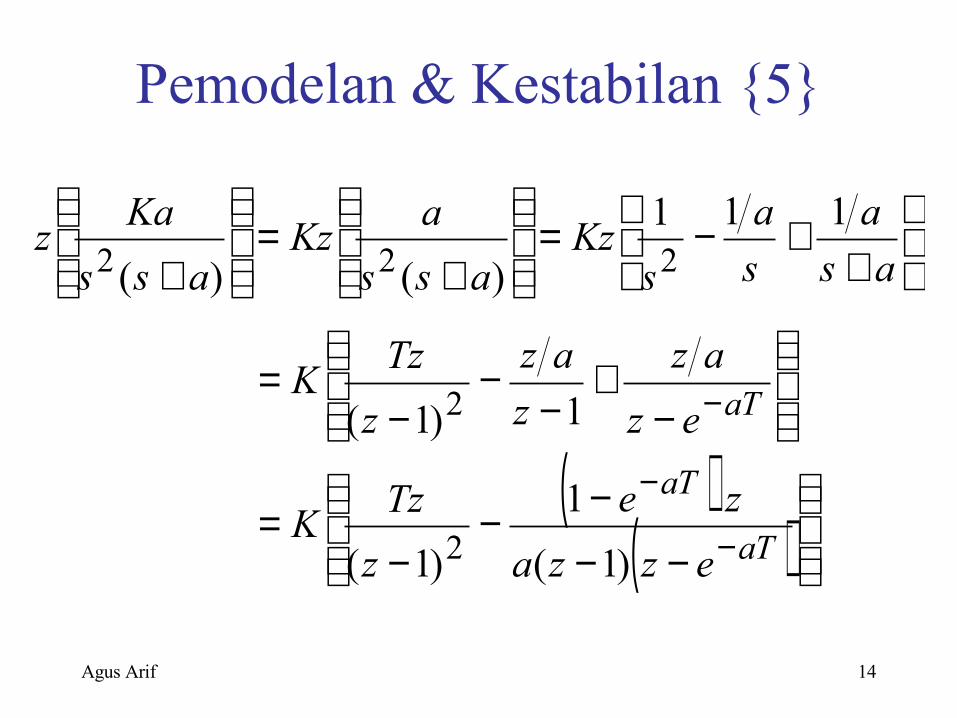
Pemodelan & Kestabilan {5}
( )( )
−−−−
−=
−+
−−
−=
++−=
+=
+
−
−
−
aT
aT
aT
ezza
ze
z
TzK
ez
az
z
az
z
TzK
as
a
s
a
sKz
ass
aKz
ass
Kaz
)1(
1
)1(
1)1(
111
)()(
2
2
222
Agus Arif 15
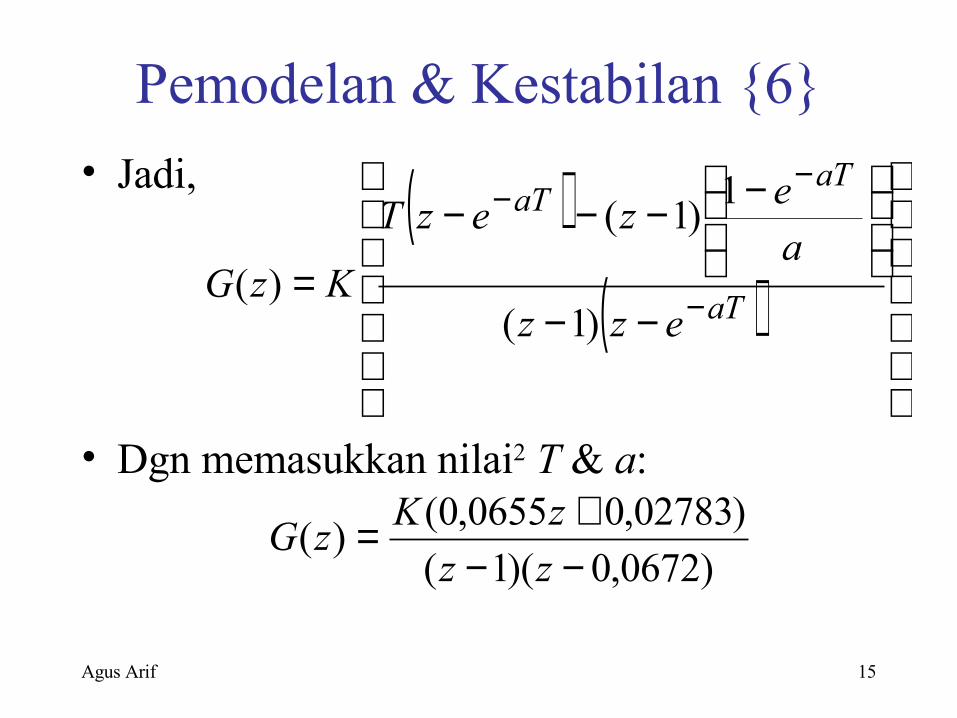
Pemodelan & Kestabilan {6}
• Jadi,
• Dgn memasukkan nilai2 T & a:
( )( )
−−
−−−−
= −
−−
aT
aTaT
ezz
a
ezezT
KzG)1(
1)1(
)(
)0672,0)(1(
)02783,00655,0()(
−−+=
zz
zKzG
Agus Arif 16
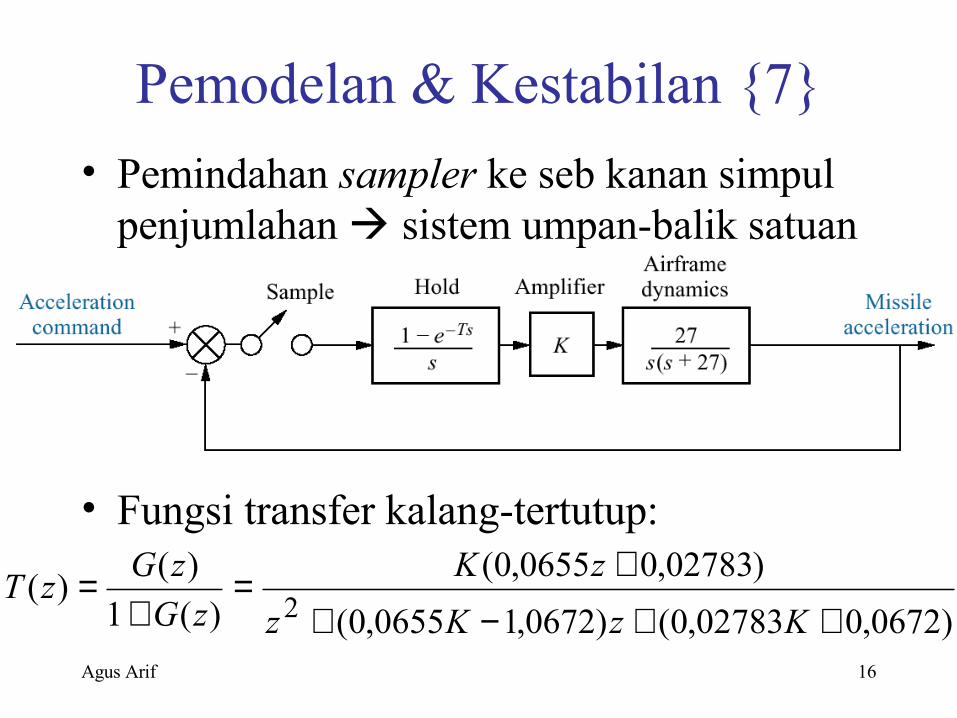
Pemodelan & Kestabilan {7}
• Pemindahan sampler ke seb kanan simpul penjumlahan sistem umpan-balik satuan
• Fungsi transfer kalang-tertutup:
)0672,002783,0()0672,10655,0(
)02783,00655,0(
)(1
)()(
2 ++−++=
+=
KzKz
zK
zG
zGzT
Agus Arif 17
Pemodelan & Kestabilan {8}
• Kestabilan sistem ditentukan akar2 polinom penyebut T(z) atau pers karakteristik:– Utk K = 20, akar2 adl 0,12 ± j0,78 sistem
stabil krn semua pole di dalam lingkaran satuan– Utk K = 100, akar2 adl –0,58 & –4,9 sistem
tdk stabil krn ada pole di luar lingkaran satuan
• Metode penentuan kestabilan ini berdasar pd penentuan akar2 pers karakteristik– Sulit diterapkan pd sistem2 yg berorde-tinggi
Agus Arif 18
Selang Pencuplikan {1}
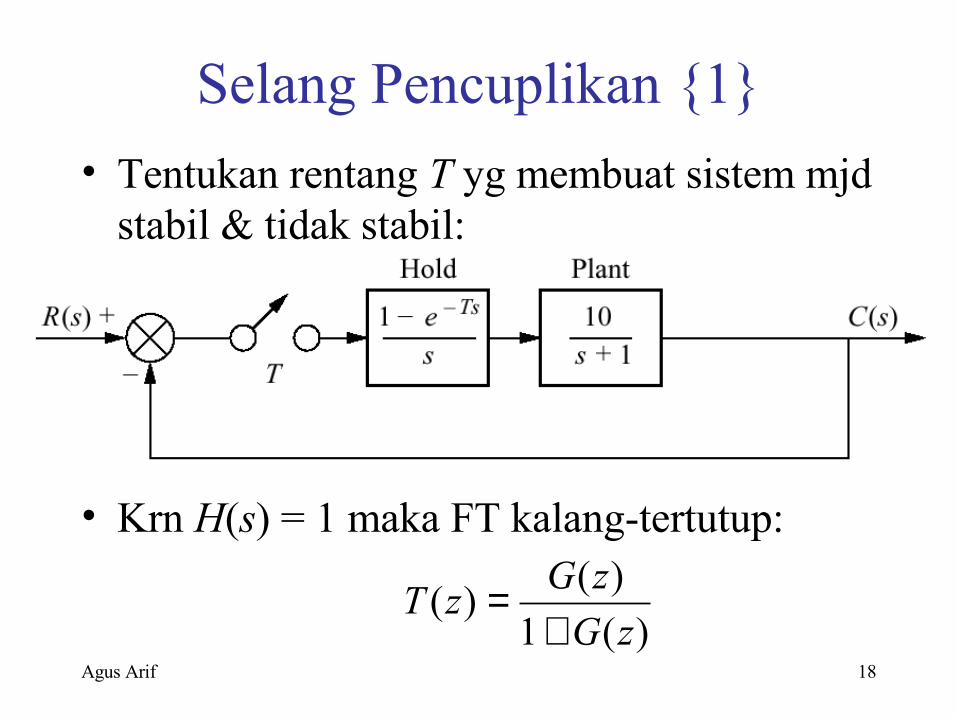
• Tentukan rentang T yg membuat sistem mjd stabil & tidak stabil:
• Krn H(s) = 1 maka FT kalang-tertutup:
)(1
)()(
zG
zGzT
+=
Agus Arif 19
Selang Pencuplikan {2}
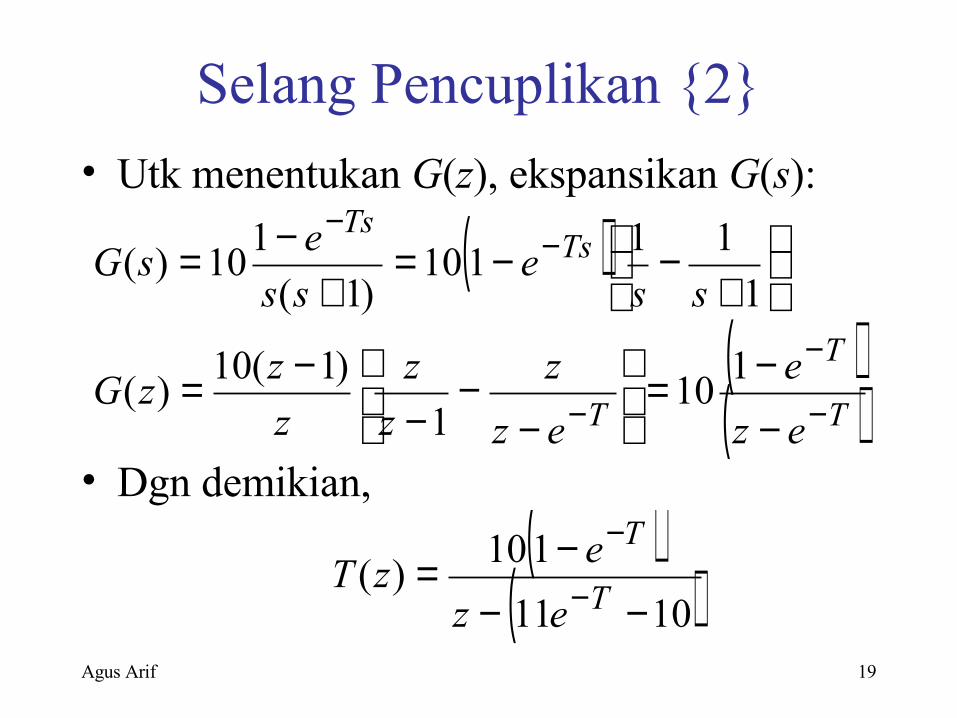
• Utk menentukan G(z), ekspansikan G(s):
• Dgn demikian,
( )( )( )T
T
T
TsTs
ez
e
ez
z
z
z
z
zzG
sse
ss
esG
−
−
−
−−
−−=
−−
−−=
+−−=
+−=
110
1
)1(10)(
1
11110
)1(
110)(
( )( )1011
110)(
−−−= −
−
T
T
ez
ezT

Agus Arif 20
Selang Pencuplikan {3}
• Akar pers karakteristik atau pole dr T(z):
– Menurun terus dr +1 ke –1 utk 0 < T < 0,2 pole di dalam lingkaran satuan sistem stabil
– Menurun terus dr –1 ke –10 utk 0,2 < T < ∞ pole di luar lngkaran satuan sistem tdk stabil
• Scr frekuensi, f = 1 / T, sistem akan stabil slm frekuensi pencuplikan 1/0,2 = 5 Hz atau lebih besar
( )1011 −−Te
Agus Arif 21
Transformasi Bilinear {1}
• Transf ini memungkinkan utk menerapkan teknik2 analisis & desain bidang-s pd sistem digital
• Transf yg tepat: – Transf ini menghasilkan fungsi2 transedental yg
diurus melalui transformasi-z yg agak ruwet
• Transf yg sederhana transform bilinear– Menghasilkan argumen linear ketika disulihkan– Hanya tepat bagi penerapan yg dimaksudkan
zTsez Ts ln)1(=⇔=
Agus Arif 22
Transformasi Bilinear {2}
• Bentuk umum:
• Utk stp penerapan tertentu, perlu dijabarkan nilai2 a, b, c & d yg berbeda-beda.
• Contoh: pilihan nilai2 a, b, c & d tertentu– akan memetakan titik2 pd lingkaran satuan mjd
titik2 pd sumbu imajiner– akan memetakan titik2 di luar (dalam) lingkarn
satuan mjd titik2 di sisi kanan (kiri) sumbu-jω
acz
bdzs
dcs
basz
−+−=⇔
++=
Agus Arif 23
Transformasi Bilinear {3}
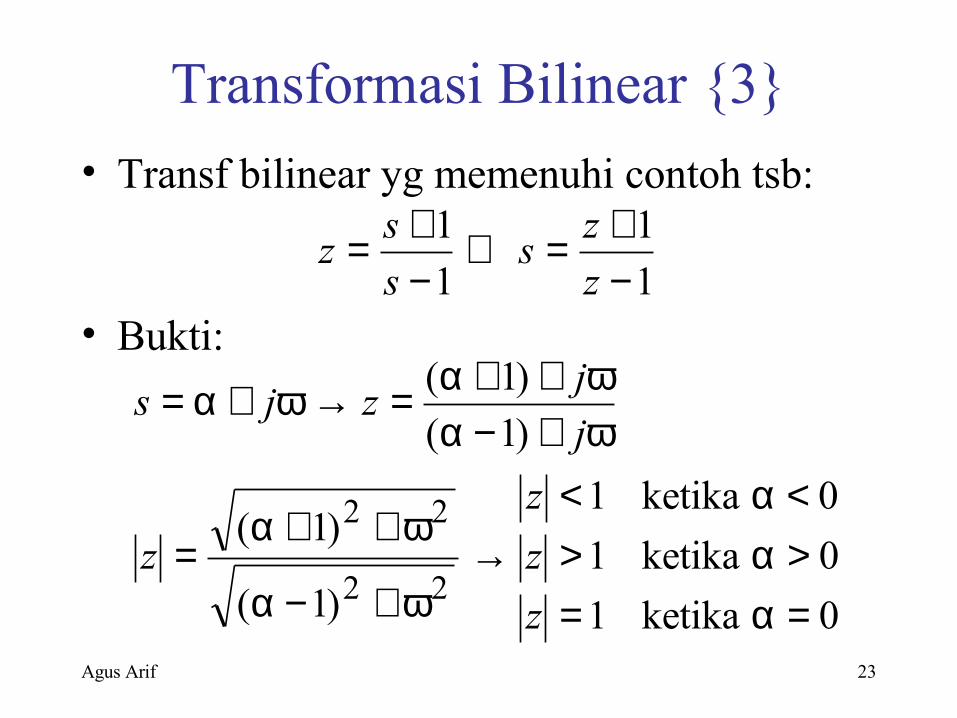
• Transf bilinear yg memenuhi contoh tsb:
• Bukti:1
1
1
1
−+=⇔
−+=
z
zs
s
sz
0ketika1
0ketika1
0ketika1
)1(
)1(
)1(
)1(
22
22
=α=>α><α<
→ω+−α
ω++α=
ω+−αω++α=→ω+α=
z
z
z
z
j
jzjs
Agus Arif 24
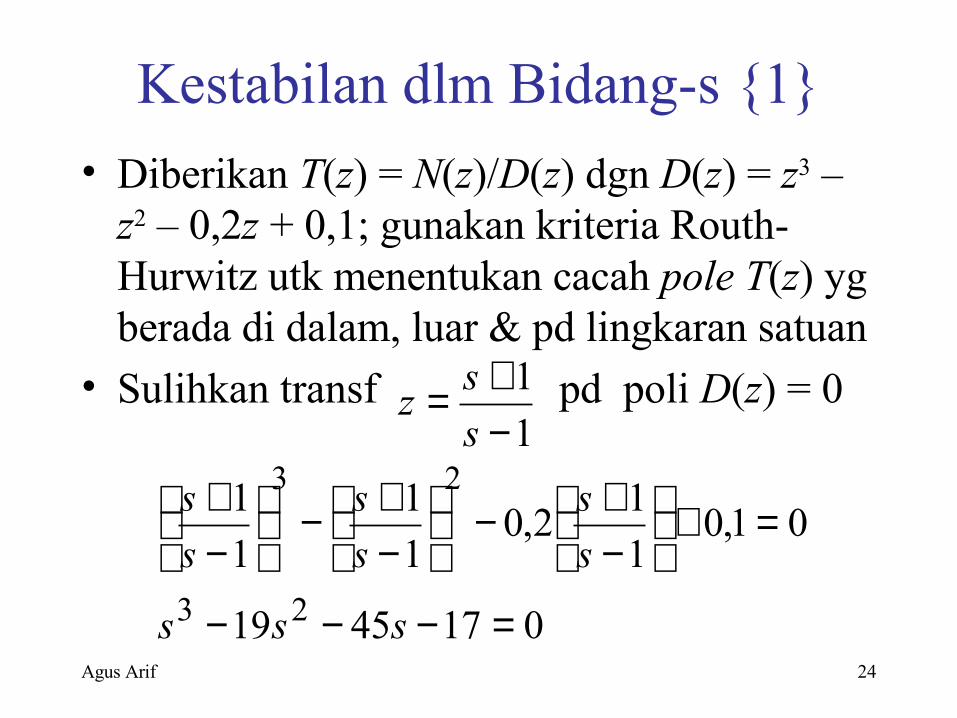
Kestabilan dlm Bidang-s {1}
• Diberikan T(z) = N(z)/D(z) dgn D(z) = z3 – z2 – 0,2z + 0,1; gunakan kriteria Routh-Hurwitz utk menentukan cacah pole T(z) yg berada di dalam, luar & pd lingkaran satuan
• Sulihkan transf pd poli D(z) = 01
1
−+=
s
sz
0174519
01,01
12,0
1
1
1
1
23
23
=−−−
=+
−+−
−+−
−+
sss
s
s
s
s
s
s
Agus Arif 25
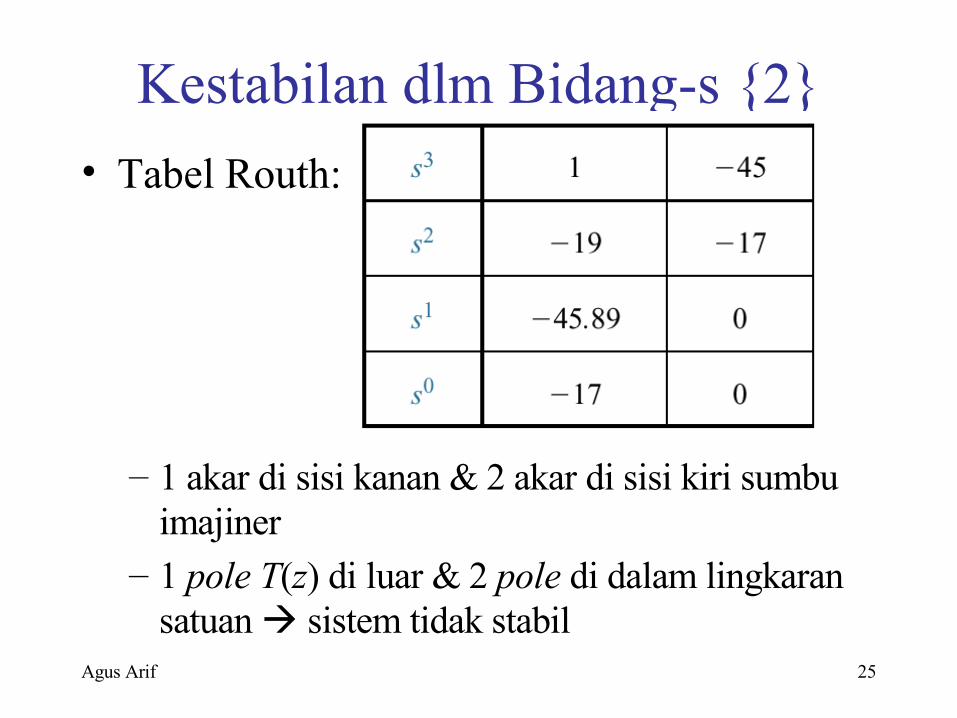
Kestabilan dlm Bidang-s {2}
• Tabel Routh:
– 1 akar di sisi kanan & 2 akar di sisi kiri sumbu imajiner
– 1 pole T(z) di luar & 2 pole di dalam lingkaran satuan sistem tidak stabil