Instrumentasi : Proposal Praktikum Proportional Control
10
1 SISTEM KONTROL PROPORTIONAL Proposal Praktikum Diajukan guna memenuhi tugas Mata Kuliah Instrumentasi Oleh: ABDUS SOLIHIN JURUSAN FISIKA FAKULTAS MATEMATIKA DAN ILMU ALAM UNIVERSITAS JEMBER 2009
-
Upload
abdus-solihin -
Category
Documents
-
view
1.630 -
download
7
description
Kontroler adalah bagian dari rangkaian atau peralatan instrumentasi yang memproses, membuat keputusan, dan memberikan instruksi lebih lanjut dalam bekerjanya suatu peralatan tertentu. Ada beberapa jenis kontroler, beberapa diantaranya adalah Kontroler Proporsional (P), Kontroler Proporsional Integral (PI), Kontroler Proporsional Deravatif (PD), dan Kontroler Proporsional Integral Deravatif (PID). Akan tetapi dalam eksperimen yang akan dilakukan hanya difokuskan pada Kontroler Proporsional (P). Hal tersebut dikarenakan Kontroler Proporsional (P) merupakan basic design atau prototype yang memberikan konsep pada kontroler yang lain.Kata proportional dalam frasa Kontroler Proporsional mempunyai arti bahwa besarnya aksi kontrol sesuai dengan besarnya error dengan faktor pengali tertentu. Konsep kerja dari Kontroler Proporsional (P) ialah pemberian keputusan dalam sistem control dengan melakukan perbandingan sinyal proses dari transmiter, variabel yang dikontrol, dengan setpointnya dan mengirim sinyal yang cocok ke control valve; atau elemen kontrol akhir lainnya dalam rangka menjaga variabel yang dikontrol pada setpoint-nya. Sehingga akan memberikan dua kemungkinan reaksi. Pertama, aksi berlawanan (reverse action) atau turun: bila harga output naik maka kontroler mengurangi sinyal output (udara tekan atau arus )-nya. Kedua, Aksi searah (direct action) atau naik: sebaliknya dari reaksi pertama.Kontrol otomatik telah memainkan peranan penting dalam sains dan rekayasa modern. Disamping untuk kepentingan khusus seperti space-vehicle system, missile-guidance system, robotic system, kontrol otomatik telah menjadi bagian integral yang penting dalam manufaktur modern dan industri proses. Sebagai contoh, kontrol otomatik merupakan esensi dalam numerical control mesin-mesin presisi pada industri manufaktur, desain sistem auto pilot pada industri penerbangan, disain mobil dalam industri otomotif. Juga dapat diterapkan pada operasi-operasi industri seperti mengontrol tekanan, temperatur, kelembaban, viskositas, aliran dalam industri proses.Mengingat aplikasi dari Kontroler Proporsional (P) ini memiliki manfaat dan kontribusi sangat besar dalam banyak bidang seperti disebutkan dalam beberapa contoh diatas, maka eksperimen mengenai Kontroler Proporsional (P) ini sangatlah penting dilakukan agar dapat dikembangkan lebih lanjut.
Transcript of Instrumentasi : Proposal Praktikum Proportional Control

1
SISTEM KONTROL PROPORTIONAL
Proposal Praktikum
Diajukan guna memenuhi tugas Mata Kuliah Instrumentasi
Oleh:
ABDUS SOLIHIN
JURUSAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU ALAM
UNIVERSITAS JEMBER
2009

2
BAB 1. PENDAHULUAN
1.1 Latar Belakang
Kontroler adalah bagian dari rangkaian atau peralatan instrumentasi yang
memproses, membuat keputusan, dan memberikan instruksi lebih lanjut dalam
bekerjanya suatu peralatan tertentu. Ada beberapa jenis kontroler, beberapa
diantaranya adalah Kontroler Proporsional (P), Kontroler Proporsional
Integral (PI), Kontroler Proporsional Deravatif (PD), dan Kontroler
Proporsional Integral Deravatif (PID). Akan tetapi dalam eksperimen yang
akan dilakukan hanya difokuskan pada Kontroler Proporsional (P). Hal
tersebut dikarenakan Kontroler Proporsional (P) merupakan basic design atau
prototype yang memberikan konsep pada kontroler yang lain.
Kata proportional dalam frasa Kontroler Proporsional mempunyai arti
bahwa besarnya aksi kontrol sesuai dengan besarnya error dengan faktor
pengali tertentu. Konsep kerja dari Kontroler Proporsional (P) ialah
pemberian keputusan dalam sistem control dengan melakukan perbandingan
sinyal proses dari transmiter, variabel yang dikontrol, dengan setpointnya dan
mengirim sinyal yang cocok ke control valve; atau elemen kontrol akhir
lainnya dalam rangka menjaga variabel yang dikontrol pada setpoint-nya.
Sehingga akan memberikan dua kemungkinan reaksi. Pertama, aksi
berlawanan (reverse action) atau turun: bila harga output naik maka kontroler
mengurangi sinyal output (udara tekan atau arus )-nya. Kedua, Aksi searah
(direct action) atau naik: sebaliknya dari reaksi pertama.
Kontrol otomatik telah memainkan peranan penting dalam sains dan
rekayasa modern. Disamping untuk kepentingan khusus seperti space-vehicle
system, missile-guidance system, robotic system, kontrol otomatik telah
menjadi bagian integral yang penting dalam manufaktur modern dan industri
proses. Sebagai contoh, kontrol otomatik merupakan esensi dalam numerical
control mesin-mesin presisi pada industri manufaktur, desain sistem auto pilot

3
pada industri penerbangan, disain mobil dalam industri otomotif. Juga dapat
diterapkan pada operasi-operasi industri seperti mengontrol tekanan,
temperatur, kelembaban, viskositas, aliran dalam industri proses.
Mengingat aplikasi dari Kontroler Proporsional (P) ini memiliki manfaat
dan kontribusi sangat besar dalam banyak bidang seperti disebutkan dalam
beberapa contoh diatas, maka eksperimen mengenai Kontroler Proporsional
(P) ini sangatlah penting dilakukan agar dapat dikembangkan lebih lanjut.
1.2 Perumusan Masalah
Perumusan masalah dari praktikum yang akan dilakukan adalah
bagaimana penguatan/gain yang terjadi dari nilai input tertentu yang
ditetapkan serta hubungannya dengan besarnya error yang terjadi, dan
identifikasi aksi control pada Kontroler Proporsional (P)?
1.3 Tujuan
a. Mengetahui bagaimana penguatan/gain yang terjadi dari nilai input
tertentu yang ditetapkan.
b. Mengetahui hubungan penguatan/gain dengan besarnya nilai error yang
terjadi.
c. mengidentifikasi aksi control pada Kontroler Proporsional (P) dengan
membandingkan sinyal masukan dan keluaran pada osiloskop.

4
BAB 2. DASAR TEORI
Kontroler adalah otak lup control yang melakukan aksi control atau
pengendalian dalam suatu proses tertentu. Kontroler membuat keputusan dalam
sistem kontrol dengan melakukan pembandingkan sinyal proses dari
transmitter(variabel yang dikontrol) terhadap seat point-nya atau dengan
mengirim sinyal yang cocok ke control valve (elemen control) akhir dalam
setpoint-nya.
Dalam melakukan tugasnya itu, kontroler akan melakukan aksi berlawanan
(reverse action), aksi searah (direct action), atau gabungan dari kedua aksi
tersebut dalam satu proses kerja. Aksi berlawanan terjadi misalnya dalam
fenomena harga output naik, maka kontroler mengurangi sinyal output. Hal
tersebut berbeda dengan aksi searah (direct action), dimana ketika harga output
naik, maka kontroler akan menambah sinyal output. (Placko, 2007: 6-7).

5
Ada beragam jenis kontroler yang diklasifikasikan berdasar aksi kontrol
yang dilakukan. Beberapa jenis kontroler tersebut misalnya on-off control action,
proportional control action (P), integral control action (I), proportional plus
integral control action (PI), proportional plus derivative control action (PD), dan
proportional plus integral plus derivative control action (PID). Dari sekian jenis
kontroler, on-off control action dan proportional control action (P) adalah sistem
kontroler yang paling mendasar dan sederhana proses kerjanya. Hal ini
dikarenakan, kontroler-kontroler yang memiliki kualifikasi lebih tinggi relatif
masih membutuhkan salah satu atau kedua jenis kontroler tersebut.
Proportional controller tidak lain adalah amplifier dengan penguatan
sebesar Kp. Kata proportional mempunyai arti bahwa besarnya aksi kontrol sesuai
dengan besarnya error dengan faktor pengali tertentu. Jenis kontroler ini memiliki
karakteristik overshoot tinggi, waktu penetapan besar, periode osilasi
sedang,adanya offset, dan gainnya (Kc)sangat mempengaruhi error. Akan tetapi,
selain karakteristik tersebut, Proportional controller memiliki kelemahan, yaitu
terdapatnya steady state error atau output yang mempunyai selisih terhadap point
yang diset (set point).
Dari gambar diatas, diperoleh nilai gain (u/e) adalah:
, dengan nilai R1 = R2 maka:

6
Besarnya gain pada Proportional controller sangat mempengaruhi nilai
error yang muncul. Dimana semakin besar nilai Kc membuat nilai offset semakin
kecil, walaupun ada harga Kc maksimum (atau biasa disebut juga dengan Kp
maksimum). Offset (disebut juga dengan droop atau steady state) terjadi karena
aksi kontrol proporsional dengan error yang disebabkan beda antara setpoint dan
control point (harga controlled variable pada kesetimbangan baru). (www.mcgoff-
bethune.com)
Dalam rangkaian Proportional controller ini, gain biasanya dapat
diungkapkan juga dalam bentuk proportional band yang disingkat dengan PB.
Dari rumusan diatas didapati bahwa proportional band (PB) mempunyai nilai 100
per nilai Kc. Sehingga PB dapat didefinisikan sebagai error yang dibutuhkan
untuk menghasilkan keluaran tambahan dari kontroler ke control valve (control
akhir yang umum).
Akan tetapi, hubungan antara kontrol dan error bergantung pada waktu,
dimana u(t) = Kp e(t). Sehingga Kp dapat juga diungkapkan sebagai fungsi transfer:
(Dalam hal ini, beberapa referensi menyebut Kp dengan Kc).
7
BAB 3. METODOLOGI EKSPERIMEN
3.1 Alat dan Bahan
Alat dan bahan yang dipergunakan pada eksperimen ini adalah:
1. Osiloskop
2. Sumber arus AC (listrik rumah tangga)
3. Function generator
4. Resistor: 2 buah dengan nilai masing-masing 1 kΩ
5. Potensiometer
6. Operational Amplifier (Op-Amp)
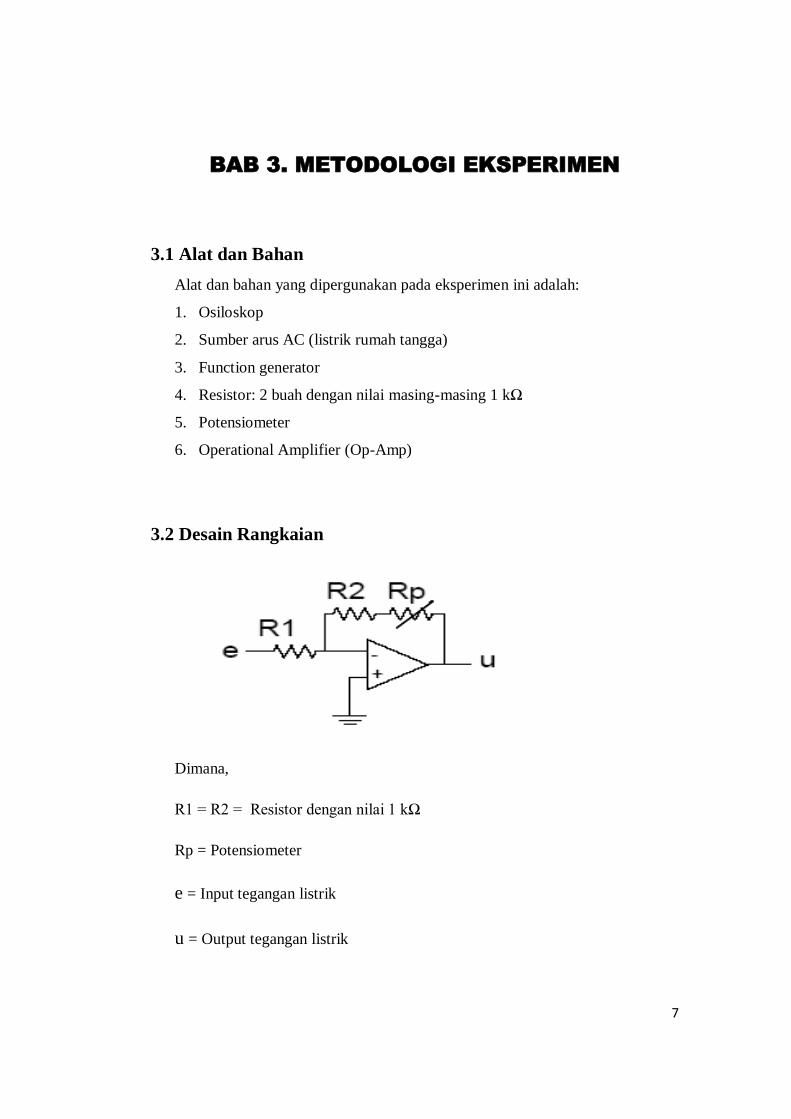
3.2 Desain Rangkaian
Dimana,
R1 = R2 = Resistor dengan nilai 1 kΩ
Rp = Potensiometer
e = Input tegangan listrik
u = Output tegangan listrik

8
3.3 Langkah Kerja
Tahapan-tahapan kerja yang dilakukan dalam eksperimen ini adalah:
1. Rangkaian disusun sebagaimana desain rangkaian diatas.
2. Rangakaian dihubungkan dengan osiloskop (CH1 untuk masukan dan CH2
untuk keluaran).
3. Rangkaian dihubungkan dengan function generator atau sumber AC yang
dapat diubah-ubah masukannya.
4. Tegangan masukan diubah-ubah sedemikian rupa dari nilai terkecil hingga
terbesar dengan mengubah nilai amplitudo pada function generator dan
diambil titik-titik sampel tertentu.
5. Dilakukan pengamatan pada masukan dan keluaran di osiloskop dan
ditentukan nilai gain yang muncul dengan membandingkan nilai keluaran
dan masukan tersebut.
6. Dilakukan perhitungan nilai error yang terjadi dengan menggunakan
formula konsep dasar yang telah ada (bias dilihat di dasar teori).
7. Dilakukan pengidentifikasian aksi kontrol dengan mengamati perubahan
yang terjadi antara masukan dan keluaran.
1.4 Analisa Data
Analisa data yang dipergunakan dalam eksperimen ini terdiri dari dua
bagian, yaitu analisa kuantitatif dengan pemaparan nilai-nilai tertentu secara
matematis dan analisa kualitatif yang menggunakan deskriptisasi terhadap
perubahan-perubahan atau fenomena-fenomena yang terjadi.
1. Analisa Kuantitatif
, dengan nilai R1 = R2 maka:
Sehingga dapat diketahui nilai error:

9
2. Analisa Kualitatif
Analisa kualitatif dilakukan melalui perbandingan sinyal/tegangan
masukan dan keluaran pada osiloskop secara deskriptif. Pembandingan ini
meliputi bentuk gelombang, frekuensinya, amplitude, dan sebagainya.
Sehingga didapati spesifikasi control yang terjadi melalui perubahan-
perubahan sinyal masukan dan keluaran yang teramati.

10
Daftar Pustaka
Placko, Dominique. 2007. Fundamental of Instrumentation and Measurement.
ISTE: New Porth Beach, USA.
Humpries, James T. 2000. Industrial Electronics.
www.mcgoff-bethune.comtechlinkprocess.ctrprocess.pdf