EXPERIENCIAS CON DRONES PARA EL ESTUDIO DE … · E.Alonso, J. Corominas y M. Hürlimann (Eds.)...
12
Experiencias con drones para el estudio de movimientos de ladera IX Simposio Nacional sobre Taludes y Laderas Inestables Santander, Junio 2017 E.Alonso, J. Corominas y M. Hürlimann (Eds.) CIMNE, Barcelona, 2017 EXPERIENCIAS CON DRONES PARA EL ESTUDIO DE MOVIMIENTOS DE LADERA Roger RUIZ-CARULLA*, Jordi COROMINAS* y Marcel HÜRLIMANN* * Departamento de Ingeniería Civil e Ambiental Escuela Superior de Ingenieros de Caminos, Canales y Puertos de Barcelona Universidad Politécnica de Catalunya RESUMEN La tecnología de los vehículos aéreos no tripulados o drones (UAV) se ha desarrollado de forma exponencial los últimos años. Su uso para la toma de fotografías y el posterior tratamiento con técnicas de fotogrametría digital, permiten la generación de modelos 3D de alta resolución del terreno. Estas nuevas herramientas permiten realizar trabajos de caracterización geométrica de una forma más eficaz, más segura y con mayor resolución. En esta comunicación se presentan experiencias con esta tecnología en el campo del control de erosión y deposición o cambios en el tiempo, la caracterización geométrica para inventariar un desprendimiento rocoso, así como la identificación y caracterización del patrón de discontinuidades de un frente rocoso para el análisis de estabilidad y la cuantificación de volúmenes inestables. 1. INTRODUCCIÓN El uso de los drones para la obtención de fotografías, combinado con las últimas técnicas de fotogrametría digital, permiten la obtención de una gran variedad de productos cartográficos, geométricos y gráficos que pueden facilitar el estudio en ciencias e ingenierías del entorno físico. La baja altura de vuelo permite altas resoluciones y la obtención de ortofotos de muy buena calidad con la periodicidad deseada. Además de ortofotos de gran calidad, se obtiene una nube de puntos 3D, una malla 3D texturizada y un modelo de elevaciones del terreno en formato raster del que se pueden generar curvas de nivel, perfiles del terreno, mapas de pendientes, de orientaciones, etc. También a partir de la nube de puntos se pueden generar subproductos como nubes de puntos por orientación, buzamiento, o tratamientos geométricos sobre las nubes de 581
Transcript of EXPERIENCIAS CON DRONES PARA EL ESTUDIO DE … · E.Alonso, J. Corominas y M. Hürlimann (Eds.)...

Experiencias con drones para el estudio de movimientos de ladera
IX Simposio Nacional sobre Taludes y Laderas Inestables Santander, Junio 2017
E.Alonso, J. Corominas y M. Hürlimann (Eds.) CIMNE, Barcelona, 2017
EXPERIENCIAS CON DRONES PARA EL ESTUDIO DE MOVIMIENTOS DE LADERA Roger RUIZ-CARULLA*, Jordi COROMINAS* y Marcel HÜRLIMANN*
* Departamento de Ingeniería Civil e Ambiental Escuela Superior de Ingenieros de Caminos, Canales y Puertos de Barcelona Universidad Politécnica de Catalunya RESUMEN La tecnología de los vehículos aéreos no tripulados o drones (UAV) se ha desarrollado de forma exponencial los últimos años. Su uso para la toma de fotografías y el posterior tratamiento con técnicas de fotogrametría digital, permiten la generación de modelos 3D de alta resolución del terreno. Estas nuevas herramientas permiten realizar trabajos de caracterización geométrica de una forma más eficaz, más segura y con mayor resolución. En esta comunicación se presentan experiencias con esta tecnología en el campo del control de erosión y deposición o cambios en el tiempo, la caracterización geométrica para inventariar un desprendimiento rocoso, así como la identificación y caracterización del patrón de discontinuidades de un frente rocoso para el análisis de estabilidad y la cuantificación de volúmenes inestables. 1. INTRODUCCIÓN El uso de los drones para la obtención de fotografías, combinado con las últimas técnicas de fotogrametría digital, permiten la obtención de una gran variedad de productos cartográficos, geométricos y gráficos que pueden facilitar el estudio en ciencias e ingenierías del entorno físico. La baja altura de vuelo permite altas resoluciones y la obtención de ortofotos de muy buena calidad con la periodicidad deseada. Además de ortofotos de gran calidad, se obtiene una nube de puntos 3D, una malla 3D texturizada y un modelo de elevaciones del terreno en formato raster del que se pueden generar curvas de nivel, perfiles del terreno, mapas de pendientes, de orientaciones, etc. También a partir de la nube de puntos se pueden generar subproductos como nubes de puntos por orientación, buzamiento, o tratamientos geométricos sobre las nubes de
581
2
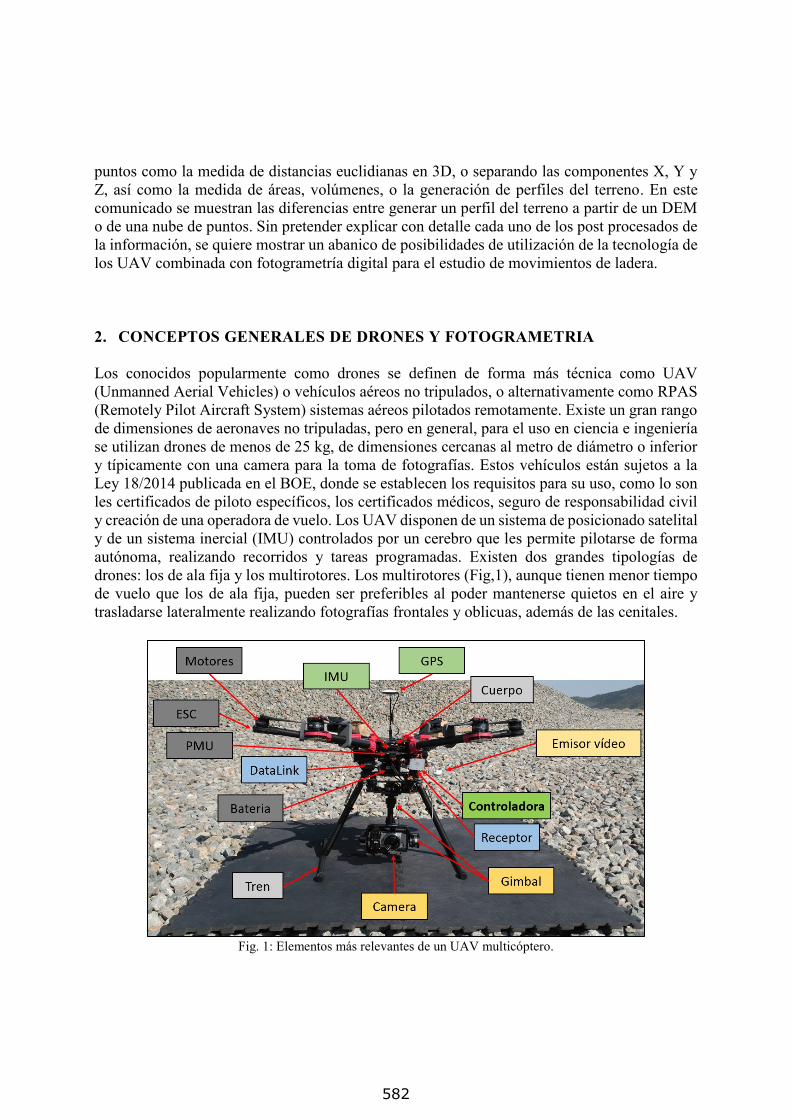
puntos como la medida de distancias euclidianas en 3D, o separando las componentes X, Y y Z, así como la medida de áreas, volúmenes, o la generación de perfiles del terreno. En este comunicado se muestran las diferencias entre generar un perfil del terreno a partir de un DEM o de una nube de puntos. Sin pretender explicar con detalle cada uno de los post procesados de la información, se quiere mostrar un abanico de posibilidades de utilización de la tecnología de los UAV combinada con fotogrametría digital para el estudio de movimientos de ladera. 2. CONCEPTOS GENERALES DE DRONES Y FOTOGRAMETRIA Los conocidos popularmente como drones se definen de forma más técnica como UAV (Unmanned Aerial Vehicles) o vehículos aéreos no tripulados, o alternativamente como RPAS (Remotely Pilot Aircraft System) sistemas aéreos pilotados remotamente. Existe un gran rango de dimensiones de aeronaves no tripuladas, pero en general, para el uso en ciencia e ingeniería se utilizan drones de menos de 25 kg, de dimensiones cercanas al metro de diámetro o inferior y típicamente con una camera para la toma de fotografías. Estos vehículos están sujetos a la Ley 18/2014 publicada en el BOE, donde se establecen los requisitos para su uso, como lo son les certificados de piloto específicos, los certificados médicos, seguro de responsabilidad civil y creación de una operadora de vuelo. Los UAV disponen de un sistema de posicionado satelital y de un sistema inercial (IMU) controlados por un cerebro que les permite pilotarse de forma autónoma, realizando recorridos y tareas programadas. Existen dos grandes tipologías de drones: los de ala fija y los multirotores. Los multirotores (Fig,1), aunque tienen menor tiempo de vuelo que los de ala fija, pueden ser preferibles al poder mantenerse quietos en el aire y trasladarse lateralmente realizando fotografías frontales y oblicuas, además de las cenitales.
Fig. 1: Elementos más relevantes de un UAV multicóptero.
582
3
Otros elementos relevantes de un multirotor son la batería, el sistema de gestión de corriente (Power Main Unit), los variadores (Electronic Speed Control) y los motores. Un sistema receptor permite el pilotaje a través de una emisora programable de 2,4 GHz, mientras que un segundo sistema de comunicación (como el DataLink), permite el control para vuelos programados des un ordenador o una Tablet. Finalmente, la cámara o sensor que se desee utilizar será la parte más relevante del dron, siendo la fuente de adquisición de la información. Por este motivo, otro importante elemento es el estabilizador de 3 ejes de la cámara (Gimbal). Los programas de tratamiento de imágenes mediante fotogrametría digital, como el VisualSFM, Agisoft PhotoScan, PIX4D, Accute3D u otros, permiten la generación de una gran cantidad de información espacial. Todos ellos dependen de la calidad de las imágenes, de su enfoque, claridad, y dependiendo de la distancia al objeto, la distancia focal y la dimensión del sensor se obtendrán distintas resoluciones (Thoeni et al 2014). La baja altitud de vuelo, menor a los 120 metros sobre el suelo por ley, permite unas resoluciones muy altas, con valores típicos de 3 cm/px a dicha altura (considerando un sensor de 18mm de ancho, con una distancia focal de 15mm e imágenes de 4608 píxeles de ancho). A menor distancia del objeto, la resolución aumenta, con 1 cm/px a 40 metros del objeto de estudio (por ejemplo). La altura de vuelo, se debe combinar con la velocidad del vuelo y la frecuencia temporal de disparo para garantizar un correcto solapamiento entre imágenes para permitir la corrección fotogramétrica entre pares de imágenes. Además, la escala y la georreferenciación del modelo no se deberían dejar depender exclusivamente de los datos del GPS del dron, con errores de entre 1 a 10 metros en el posicionamiento final del modelo. Dependiendo de la resolución de interés en función de cada caso, se puede considerar oportuno conseguir errores de posicionamiento entre 1 y 5 cm o inferiores. Para ello es necesario utilizar puntos de control de coordenadas conocidas con forma de dianas que puedan ser bien identificadas en las fotografías y de las que se midan sus coordenados con precisión con estación total o GPS-RTK. Para todo ello es necesario tener conocimientos de topografía y fotogrametría para el diseño del plan de vuelo, teniendo especial atención en la conservación de la distancia al terreno para obtener resultados homogéneos. Así mismo, es necesario un amplio conocimiento en drones y una buena experiencia en vuelos, en especial atención en los vuelos en alta montaña. 3. APLICACIÓN A INVENTARIO DE DESPRENDIMIENTO ROCOSO Para la caracterización de movimientos de laderas, la obtención de modelos 3D poco después de que ocurran, y los subsecuentes productos como ortofotos, modelos digitales de elevaciones, curvas de nivel, etc., pueden ser de gran ayuda para su cartografía , caracterización e interpretación.
583
4
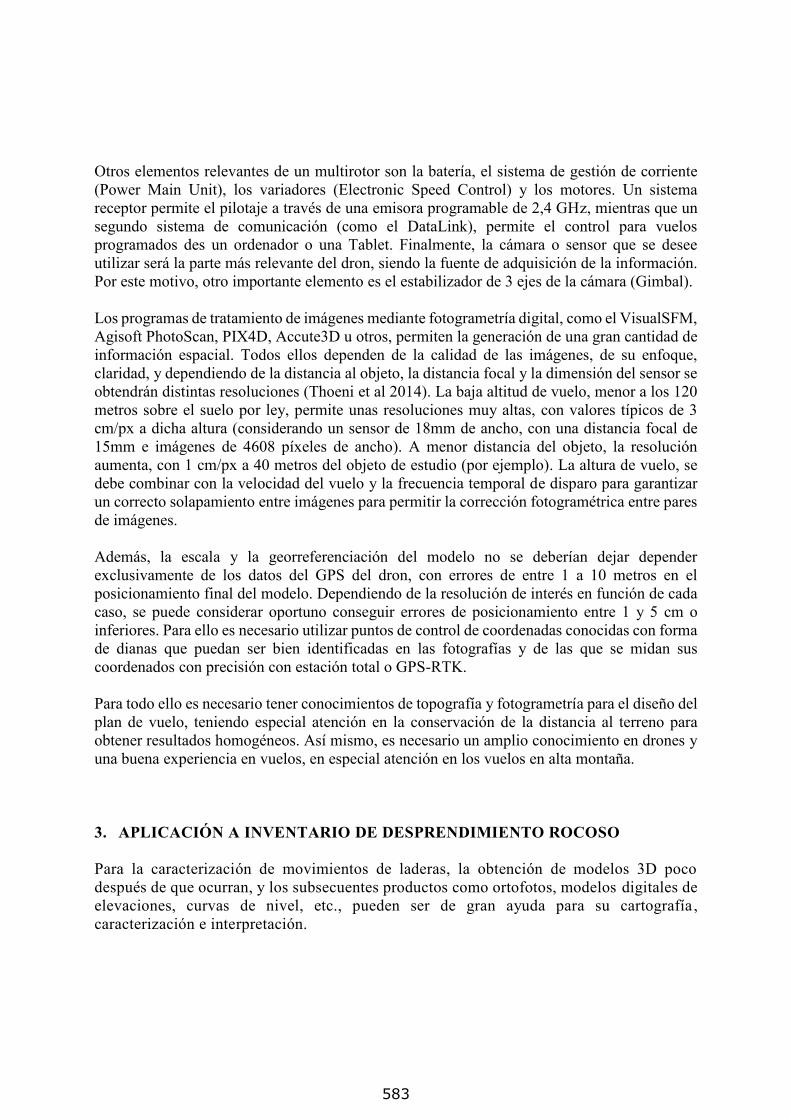
En abril de 2016 ocurrió un desprendimiento en el municipio de Gurp, en la cuenca de Tremp, en Cataluña. Este desprendimiento se inventario en el marco de un proyecto de investigación centrado en la fragmentación de desprendimientos rocoso. Para ello, se midieron 500 bloques que conformaban casi la totalidad del depósito. Además, se realizó un vuelo de dron que permitió la obtención de un modelo 3D de la ladera y del frente rocoso (Fig. 2). Con el modelo debidamente georreferenciado, se estimó el volumen desprendido a partir del modelo 3D de detalle de la zona de cicatriz, basándonos en la identificación visual de las caras frescas y la caracterización de las juntas que delimitaban el bloque desprendido.
Fig. 2: Modelo 3D de un desprendimiento inventariado en el municipio de Gurp, Cuenca de Tremp, Cataluña.
Este tipo de modelos 3D, junto a la ortofoto y el modelo de elevaciones, permiten medir con comodidad, precisión y seguridad la información que se desee, como máximos alcances,
584
5
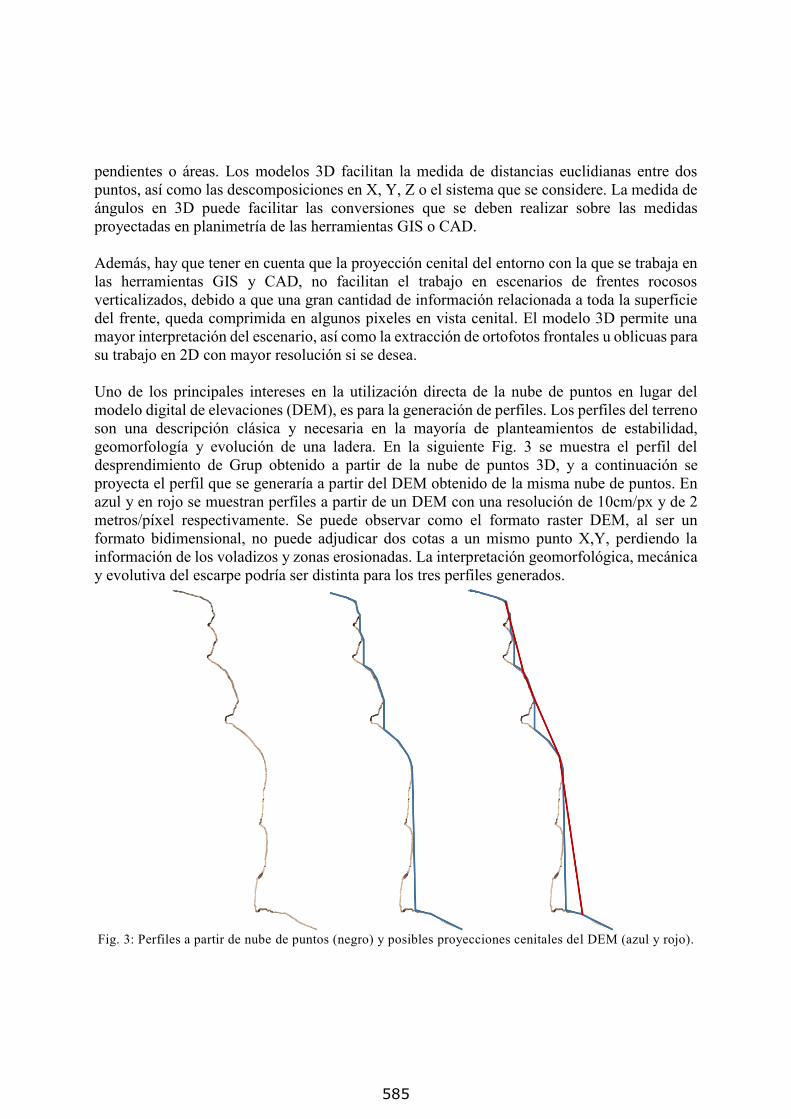
pendientes o áreas. Los modelos 3D facilitan la medida de distancias euclidianas entre dos puntos, así como las descomposiciones en X, Y, Z o el sistema que se considere. La medida de ángulos en 3D puede facilitar las conversiones que se deben realizar sobre las medidas proyectadas en planimetría de las herramientas GIS o CAD. Además, hay que tener en cuenta que la proyección cenital del entorno con la que se trabaja en las herramientas GIS y CAD, no facilitan el trabajo en escenarios de frentes rocosos verticalizados, debido a que una gran cantidad de información relacionada a toda la superficie del frente, queda comprimida en algunos pixeles en vista cenital. El modelo 3D permite una mayor interpretación del escenario, así como la extracción de ortofotos frontales u oblicuas para su trabajo en 2D con mayor resolución si se desea. Uno de los principales intereses en la utilización directa de la nube de puntos en lugar del modelo digital de elevaciones (DEM), es para la generación de perfiles. Los perfiles del terreno son una descripción clásica y necesaria en la mayoría de planteamientos de estabilidad, geomorfología y evolución de una ladera. En la siguiente Fig. 3 se muestra el perfil del desprendimiento de Grup obtenido a partir de la nube de puntos 3D, y a continuación se proyecta el perfil que se generaría a partir del DEM obtenido de la misma nube de puntos. En azul y en rojo se muestran perfiles a partir de un DEM con una resolución de 10cm/px y de 2 metros/píxel respectivamente. Se puede observar como el formato raster DEM, al ser un formato bidimensional, no puede adjudicar dos cotas a un mismo punto X,Y, perdiendo la información de los voladizos y zonas erosionadas. La interpretación geomorfológica, mecánica y evolutiva del escarpe podría ser distinta para los tres perfiles generados.
Fig. 3: Perfiles a partir de nube de puntos (negro) y posibles proyecciones cenitales del DEM (azul y rojo).
585
6
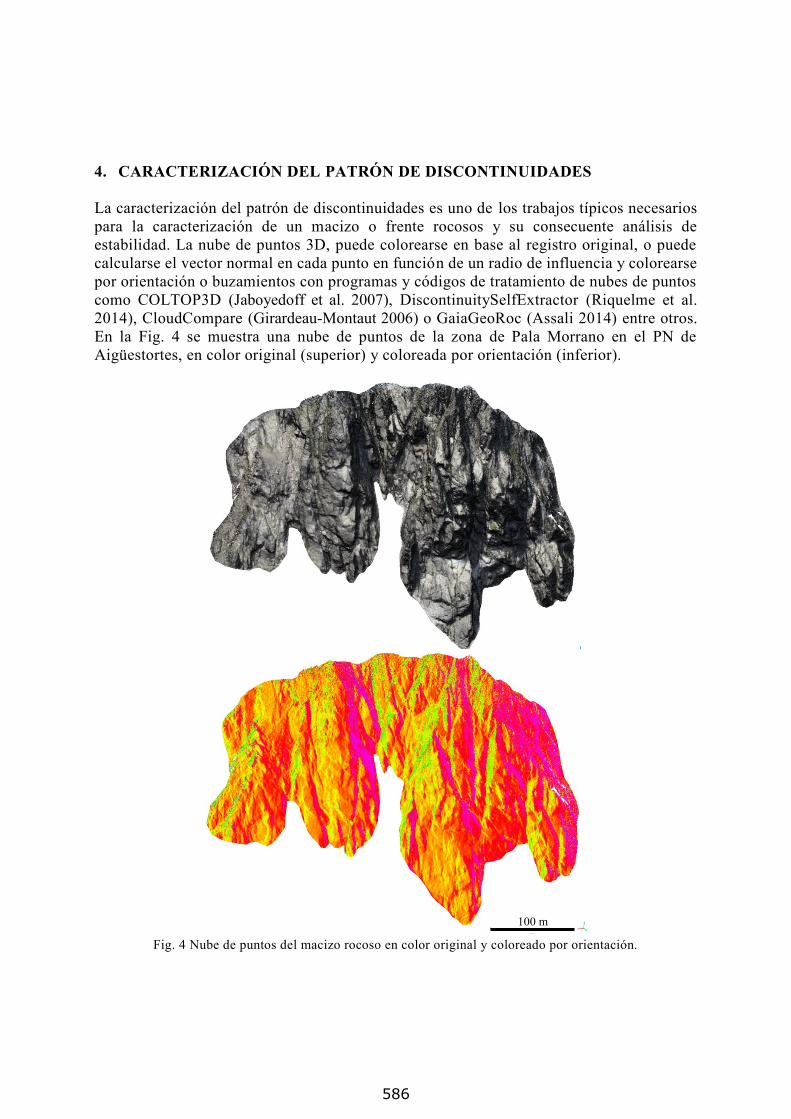
4. CARACTERIZACIÓN DEL PATRÓN DE DISCONTINUIDADES La caracterización del patrón de discontinuidades es uno de los trabajos típicos necesarios para la caracterización de un macizo o frente rocosos y su consecuente análisis de estabilidad. La nube de puntos 3D, puede colorearse en base al registro original, o puede calcularse el vector normal en cada punto en función de un radio de influencia y colorearse por orientación o buzamientos con programas y códigos de tratamiento de nubes de puntos como COLTOP3D (Jaboyedoff et al. 2007), DiscontinuitySelfExtractor (Riquelme et al. 2014), CloudCompare (Girardeau-Montaut 2006) o GaiaGeoRoc (Assali 2014) entre otros. En la Fig. 4 se muestra una nube de puntos de la zona de Pala Morrano en el PN de Aigüestortes, en color original (superior) y coloreada por orientación (inferior).
Fig. 4 Nube de puntos del macizo rocoso en color original y coloreado por orientación.
100 m
586
7
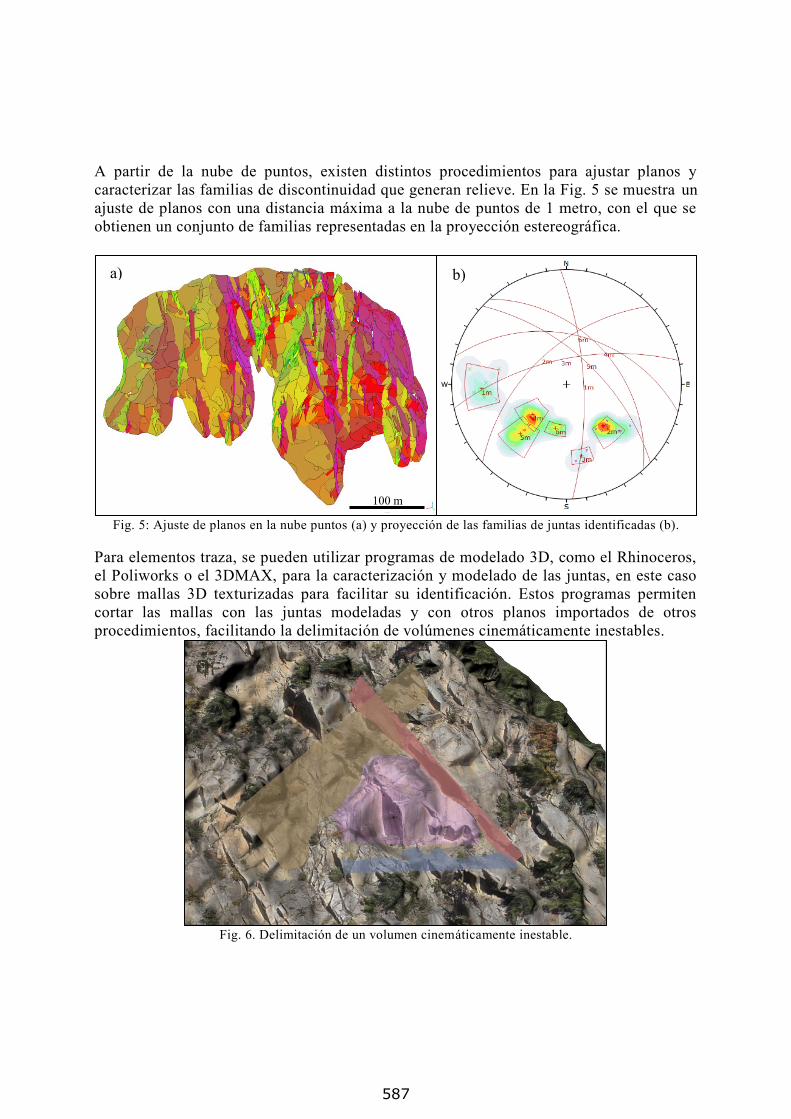
A partir de la nube de puntos, existen distintos procedimientos para ajustar planos y caracterizar las familias de discontinuidad que generan relieve. En la Fig. 5 se muestra un ajuste de planos con una distancia máxima a la nube de puntos de 1 metro, con el que se obtienen un conjunto de familias representadas en la proyección estereográfica.
Fig. 5: Ajuste de planos en la nube puntos (a) y proyección de las familias de juntas identificadas (b).
Para elementos traza, se pueden utilizar programas de modelado 3D, como el Rhinoceros, el Poliworks o el 3DMAX, para la caracterización y modelado de las juntas, en este caso sobre mallas 3D texturizadas para facilitar su identificación. Estos programas permiten cortar las mallas con las juntas modeladas y con otros planos importados de otros procedimientos, facilitando la delimitación de volúmenes cinemáticamente inestables.
Fig. 6. Delimitación de un volumen cinemáticamente inestable.
a) b)
100 m
587
8
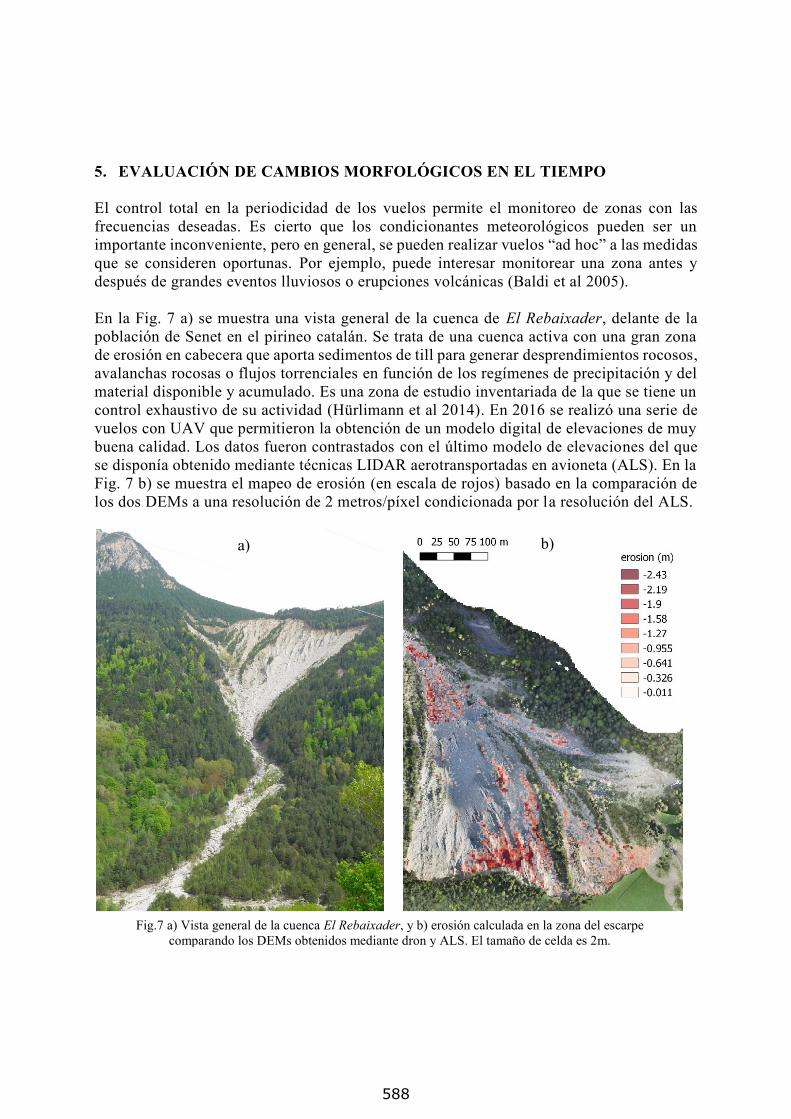
5. EVALUACIÓN DE CAMBIOS MORFOLÓGICOS EN EL TIEMPO El control total en la periodicidad de los vuelos permite el monitoreo de zonas con las frecuencias deseadas. Es cierto que los condicionantes meteorológicos pueden ser un importante inconveniente, pero en general, se pueden realizar vuelos “ad hoc” a las medidas que se consideren oportunas. Por ejemplo, puede interesar monitorear una zona antes y después de grandes eventos lluviosos o erupciones volcánicas (Baldi et al 2005). En la Fig. 7 a) se muestra una vista general de la cuenca de El Rebaixader, delante de la población de Senet en el pirineo catalán. Se trata de una cuenca activa con una gran zona de erosión en cabecera que aporta sedimentos de till para generar desprendimientos rocosos, avalanchas rocosas o flujos torrenciales en función de los regímenes de precipitación y del material disponible y acumulado. Es una zona de estudio inventariada de la que se tiene un control exhaustivo de su actividad (Hürlimann et al 2014). En 2016 se realizó una serie de vuelos con UAV que permitieron la obtención de un modelo digital de elevaciones de muy buena calidad. Los datos fueron contrastados con el último modelo de elevaciones del que se disponía obtenido mediante técnicas LIDAR aerotransportadas en avioneta (ALS). En la Fig. 7 b) se muestra el mapeo de erosión (en escala de rojos) basado en la comparación de los dos DEMs a una resolución de 2 metros/píxel condicionada por la resolución del ALS.
a) b)
Fig.7 a) Vista general de la cuenca El Rebaixader, y b) erosión calculada en la zona del escarpe comparando los DEMs obtenidos mediante dron y ALS. El tamaño de celda es 2m.
588
9
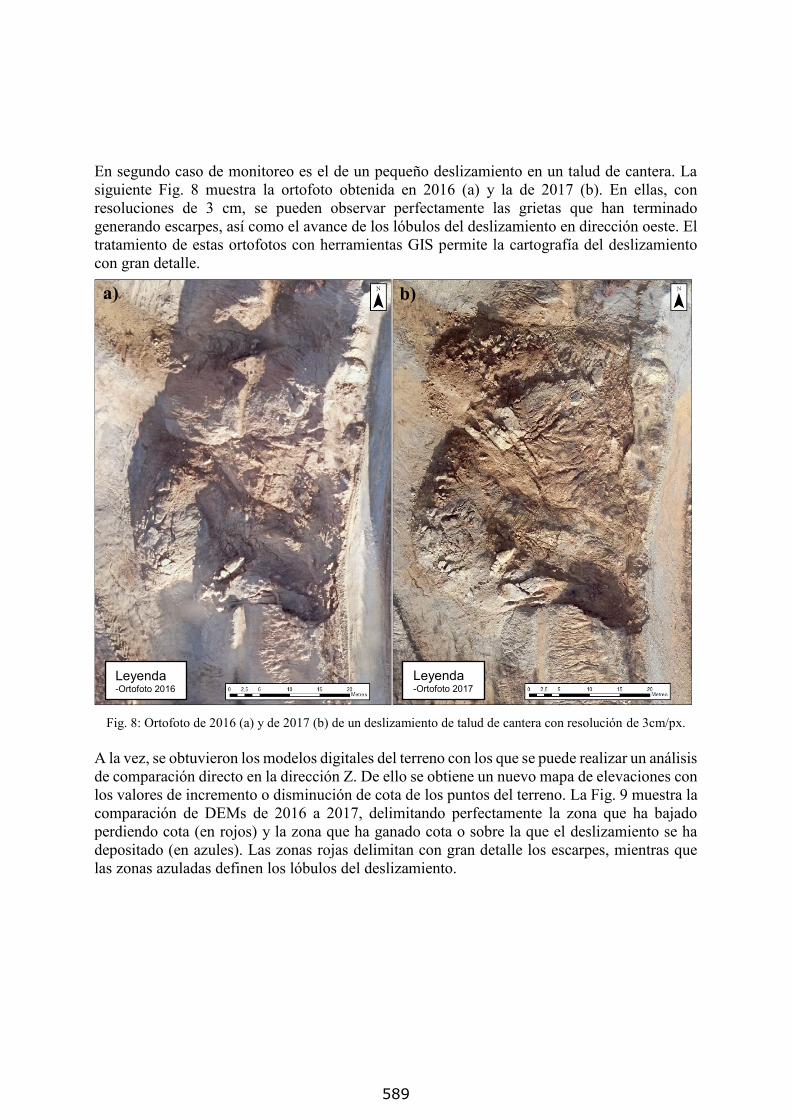
En segundo caso de monitoreo es el de un pequeño deslizamiento en un talud de cantera. La siguiente Fig. 8 muestra la ortofoto obtenida en 2016 (a) y la de 2017 (b). En ellas, con resoluciones de 3 cm, se pueden observar perfectamente las grietas que han terminado generando escarpes, así como el avance de los lóbulos del deslizamiento en dirección oeste. El tratamiento de estas ortofotos con herramientas GIS permite la cartografía del deslizamiento con gran detalle.
Fig. 8: Ortofoto de 2016 (a) y de 2017 (b) de un deslizamiento de talud de cantera con resolución de 3cm/px.
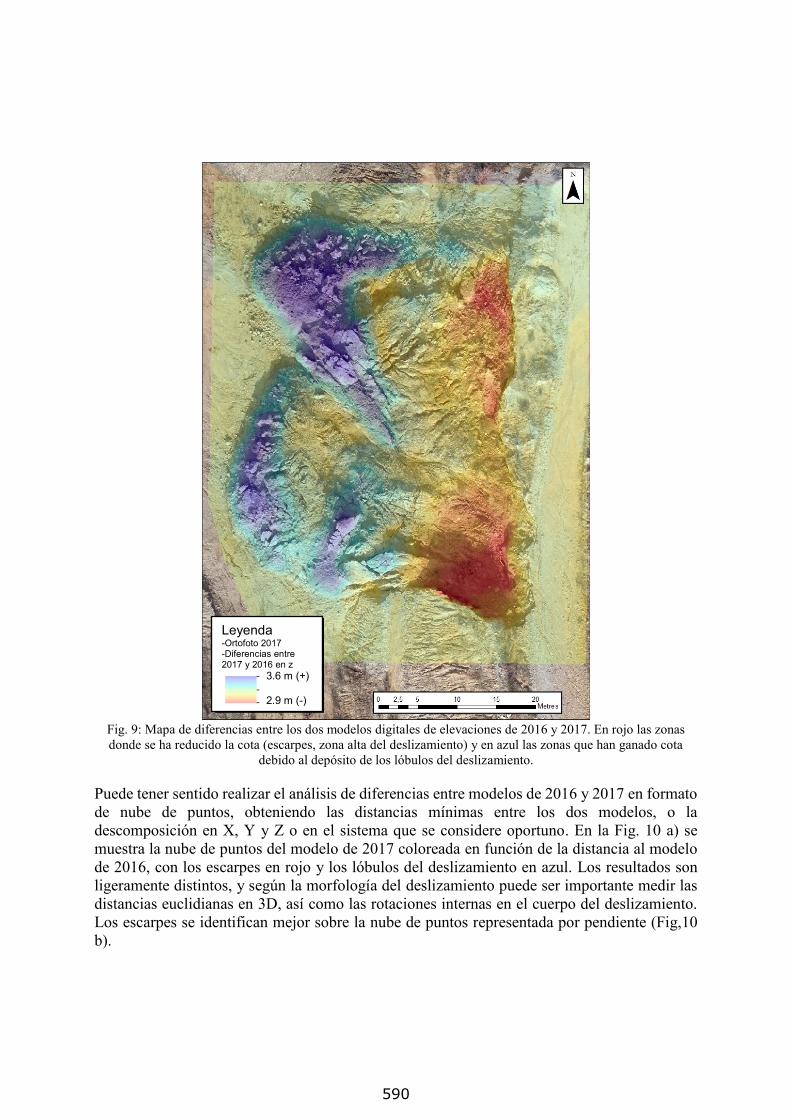
A la vez, se obtuvieron los modelos digitales del terreno con los que se puede realizar un análisis de comparación directo en la dirección Z. De ello se obtiene un nuevo mapa de elevaciones con los valores de incremento o disminución de cota de los puntos del terreno. La Fig. 9 muestra la comparación de DEMs de 2016 a 2017, delimitando perfectamente la zona que ha bajado perdiendo cota (en rojos) y la zona que ha ganado cota o sobre la que el deslizamiento se ha depositado (en azules). Las zonas rojas delimitan con gran detalle los escarpes, mientras que las zonas azuladas definen los lóbulos del deslizamiento.
a) b)
Leyenda -Ortofoto 2016
Leyenda -Ortofoto 2017
589
10
Fig. 9: Mapa de diferencias entre los dos modelos digitales de elevaciones de 2016 y 2017. En rojo las zonas donde se ha reducido la cota (escarpes, zona alta del deslizamiento) y en azul las zonas que han ganado cota
debido al depósito de los lóbulos del deslizamiento.
Puede tener sentido realizar el análisis de diferencias entre modelos de 2016 y 2017 en formato de nube de puntos, obteniendo las distancias mínimas entre los dos modelos, o la descomposición en X, Y y Z o en el sistema que se considere oportuno. En la Fig. 10 a) se muestra la nube de puntos del modelo de 2017 coloreada en función de la distancia al modelo de 2016, con los escarpes en rojo y los lóbulos del deslizamiento en azul. Los resultados son ligeramente distintos, y según la morfología del deslizamiento puede ser importante medir las distancias euclidianas en 3D, así como las rotaciones internas en el cuerpo del deslizamiento. Los escarpes se identifican mejor sobre la nube de puntos representada por pendiente (Fig,10 b).
Leyenda -Ortofoto 2017 -Diferencias entre 2017 y 2016 en z 3.6 m (+) 2.9 m (-)
590

11
Fig. 10: a) Nube de puntos de 2017 coloreada en función de la distancia mínima a la nube de puntos de 2016; y
b) Nube de puntos de 2017 coloreada en función de la pendiente (rojo 90º, verde 0º) Finalmente, parece interesante la extracción de perfiles sobre las nubes de puntos que nos permiten comparar la evolución del perfil del terreno coloreado por distancia mínima entre los dos modelos, donde se observa claramente la rotación y el desplazamiento de masa (Fig. 11)
Fig. 11: Perfiles sobre las nubes de puntos: 2016 en negro y 2017 coloreado por distancia mínima entre modelos.
a) b)
591
12
6. CONCLUSIONES Las utilizaciones de los drones combinados con técnicas de fotogrametría pueden aportar una gran cantidad de información de mucha calidad. Su aplicación en la descripción de inestabilidades de ladera, caracterización de discontinuidades, delimitación de volúmenes inestables, así como tareas de monitorización, le convertirá en una herramienta imprescindible para mejorar el rendimiento, acceder a más y mejor información y mejorar la seguridad y la eficiencia en los trabajos de campo. 7. AGRADECIMIENTOS Los autores quieren agradecer al Ministerio de Economía y Competitividad por el soporte económico del proyecto de investigación RockRisk (BIA2013-42582-P), la beca FPU del primer autor (FPU13/04252), así como la beca “Ayudas Fundación BBVA a Investigadores Innovadores y Creadores Culturales” al tercer autor.
REFERENCIAS Assali P (2014) Modélisation géostructurale 3D de parois rocheuses en milieu ferroviaire. Thèse de
Docteur de l'Université de Strasbourg. École Doctorale Mathématiques, Sciences de l'Information et de l'Ingénieur.
Baldi P, Fabris M, Marsella M, Monticelli R (2005). Monitoring the morphological evolution of the Sciara del Fuoco during the 2002–2003 Stromboli eruption using multi-temporal photogrammetry. ISPRS Journal of Photogrammetry & Remote Sensingm Volume 59, pp 199-211
Girardeau-Montaut (2006) Detection de Changement sur des Données Géométriques 3D", D. PhD manuscript (french), Signal & Images Processing, Telecom Paris
Hürlimann, M., Abancó, C., Moya, J., & Vilajosana, I. (2014). Results and experiences gathered at the Rebaixader debris-flow monitoring site, Central Pyrenees, Spain. Landslides, 11, 939–953
Jaboyedoff M, Metzger R, Oppikofer T, Couture R, Derron MH, Locat J, Turmel D (2007) New insight techniques to analyze rock-slope relief using DEM and 3D-imaging cloud points: COLTOP-3D software, in: Rock mechanics: Meeting Society’s challenges and demands, Proceedings of the 1st Canada – U.S. Rock Mechanics Symposium, edited by: Eberhardt, E., Stead, D., and Morrison, T., Vancouver, Canada, 27–31 May, Taylor & Francis, London, UK, 1, 61–68
Riquelme A, Abellán A, Tomás R, Jaboyedoff M (2014) A New Approach for Semi-Automatic Rock Mass Joints Recognition from 3D Point Clouds. Computers & Geosciences 68. Elsevier: 38–52. doi:10.1016/j.cageo.2014.03.014.
Thoeni K, Giacomini A, Murtagh R, Kniest E (2014) A comparison of multi-view 3D reconstruction of a rock wall using several cameras and a laser scaner. The International Archieves of the Photogrammetry, Remote Sensing and Spatial Information Science, Volume XL-5, ISPRS Technical Commission V Symposium, 23 - 25 June 2014, Riva del Garda, Italy. doi:10.5194/isprsarchives-XL-5-573-2014.
592