Dwi Basuki Wibowo , Samuel2,b, Bambang Singgih · PDF filePeragaan Pembelajaran Mekanisme...

If you can't read please download the document
Transcript of Dwi Basuki Wibowo , Samuel2,b, Bambang Singgih · PDF filePeragaan Pembelajaran Mekanisme...
1
Peragaan Pembelajaran Mekanisme Kinematika SederhanaDengan Mainan Mekanikal
Dwi Basuki Wibowo1,a,*, Samuel2,b, Bambang Singgih Hardjono3,c1Teknik Mesin UNDIP, Jl. Puri VI/2 Banyumanik Semarang
2Teknik Perkapalan UNDIP, Perum Bulusan Asri kavling 17 Tembalang Semarang3Teknik Mesin POLINES, Jl. Puri V/22 Banyumanik Semarang
a [email protected], [email protected], [email protected]
AbstrakPada semua mainan yang bisa bergerak (mainan mekanikal) selalu terdapat mekanisme kinematika.Sumber penggerak mainan mekanikal yang hanya satu dan berbentuk rotasi, tidak seperti robot dimanasemua sendi tubuh diberi motor listrik yang bisa dikendalikan, menunjukkan bahwa mekanismekinematika yang digunakan bisa sederhana hingga sangat kompleks bergantung pada banyaknya bagianmainan yang harus digerakkan. Paper ini membahas penggunaan mekanisme kinematika sederhanapada mainan mekanikal sebagai peraga pembelajaran yang tidak hanya bermanfaat untuk memotivasipara mahasiswa, tetapi juga menarik untuk merancang dan meneliti lebih lanjut. Penggunaan mainansebagai peraga ini sangat menguntungkan karena membuatnya mudah, dimensinya kecil dan ringan,dan komponennya sangat murah.
Kata Kunci: mainan mekanikal, mekanisme kinematika, peraga pembelajaran
1. PendahuluanMainan mekanikal, baik yang digerakkan
secara manual maupun motor listrik, sudahbanyak diproduksi orang. Mainan sepertimobil-mobilan, robot, dan lain-lain adalahcontoh mainan yang terus membanjiri pasarIndonesia sejak diberlakukannya ACFTA tahun2010 [1]. Unsur edukasi mainan ini hampirtidak ada, hanya menimbulkan rasa senang saatmelihat/memainkannya [2].
Mainan mekanikal akan lebih menarik danmenggugah rasa ingin tahu bila mekanismepenggeraknya terlihat, contohnya adalahmainan automata. Istilah automaton (bahasainggris plural : automata) diartikan sebagaiperangkat yang bergerak dengan sendirinya (aself-operating machine) [3][4]. Hal ini seringdigunakan untuk menggambarkan mainan yangdapat digerakkan yang di dalamnya terdapatmekanisme untuk menghasilkan gerakanaktifitas tertentu mirip seperti manusia, hewan,dan mesin secara berulang [4].
Di TDC (Toys Design Center), sebuahkomunitas yang didirikan di bawah naunganLab. Proses Produksi Jurusan Teknik Mesin
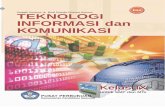
UNDIP oleh penulis pertama paper ini, mainanseperti ini disebut mainan mekanikal edukatif.Unsur edukasinya adalah mainan tidak bisaberpindah tempat dan seluruh mekanismepenggeraknya diperlihatkan sehingga siapa sajayang melihat/memainkannya dapat mengetahuijenis mekanisme penggerak dan komponennyayang mampu menghasilkan gerak obyek miripseperti gerak aktifitas ayam sedang makan(Gambar 1) atau karakter animasi lainnya.
Gambar 1 : Mainan mekanikal edukatif ayamsedang makan
Bentuk mainan mekanikal edukatif di bagianatas mainan yang digerakkan dan di bagianbawah mekanisme kinematikanya [4]. Untukmenggerakkannya secara manual denganmemutar lengan atau motor listrik berkecepatan2030 rpm (Gambar 1).
2
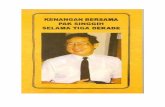
Mainan sebagai peraga edukasi FisikaMekanika dan Magnet telah dilakukan dibanyak sekolah/perguruan tinggi karena mudahdibawa (ukurannya kecil dan ringan) dan murahharganya [5]. Arvind Gupta dalam menjelaskanprinsip magnetic levitation menggunakanmagnet permanen berbentuk donat dan pensil[6], (Gambar 2, kiri). Sedangkan Julio Guemezdkk menggunakan bandul berputar sebagaiperaga edukasi dalam menerangkan prinsipkesetimbangan [5], (Gambar 2, kanan).
Gambar 2 : Pelayangan pensil untuk menggambarkankonsep magnetic levitation dan penjelasan prinsip
kesetimbangan menggunakan bandul berputar
Paper ini membahas penggunaan mainanmekanikal sebagai peraga pembelajaranmekanisme kinematika sederhana yangmerupakan produk pengembangan hasilpenelitian Hibah Bersaing TA 2014 yangberjudul Pengembangan Desain dan ProsesManufaktur Mainan Mekanikal Edukatif GunaMendukung Industri Kreatif dan PengentasanKemiskinan. Agar memenuhi kriteria sebagaiperaga edukasi, pembahasan harus mencakup 2topik pokok materi kinematika yaitu sintesa dananalisa [7][8]. Sintesa yang dimaksud adalahmemilih mekanisme dan merancang komponenkinematika yang sesuai gerak setiap bagianmainan mekanikal yang direncanakan.Sedangkan analisa meliputi analisis posisi dankecepatan saja. Analisis gaya tidak termasuk disini karena produk digerakkan dengankecepatan rendah dan konstan.
2. Komponen Kinematika yang DigunakanSumber penggerak mainan mekanikal yang
hanya satu dan berbentuk rotasi menunjukkanbahwa mekanisme kinematika yang digunakan
bisa sederhana hingga sangat kompleksbergantung pada banyaknya bagian mainanyang harus digerakkan [9]. Mekanisme yangdigunakan di sini adalah mekanisme kinematikasederhana 2D (planar kinematics) yangmeliputi komponen kinematika (kinematicpairs) cam-follower, four bar linkage, slidercrank, pulley-belt, quick-return, dan gearsystem seperti tampak pada Tabel 1 [8][10].
Tabel 1 : Komponen kinematika yang sesuai untukmengubah gerakan input rotasi ke berbagai bentuk
gerakan outputNo. Komponen
KinematikaGerakan Output
1 Pulley-Belt Rotasi2 Cam-Follower linier, osilasi, helikal3 Four Bar Linkage rotasi, elips4 Slider Crank linier, elips5 Quick-Return linier, osilasi6 Gear Rotasi
Agar keseluruhan gerak mainan dapatdihasilkan oleh susunan komponen kinematikaperlu ditetapkan lebih dahulu: (1). dimensinya,(2). bagian-bagian mainan yang digerakkan,(3). jenis dan pola gerakannya, (4). posisimaksimal dan minimalnya, (5). kecepatannya,dan (6). penggerak utamanya. Nomor (1) s/d(4) terkait dengan topik sintesa sedangkannomor (4) dan (5) terkait dengan topik analisakinematika [7][8]. Dengan demikian ketikamembahas materi kinematika di kelas jugaharus menjelaskan proses desain mainan yangmencakup ke 2 topik tersebut.
3. MetodologiAgar mainan mekanikal dapat digunakan
sebagai peraga pembelajaran kinematika perluditetapkan lebih dahulu jenis aktifitas tertentumanusia, hewan, atau mesin yang akan ditirugerakannya. Metodologinya adalah sbb :a. Memvideo obyek yang akan ditiru
gerakannya dan memutarnya frame by frameuntuk mengetahui detil gerakan setiap tahap.
b. Membuat sketsa mainan lengkap dengandimensinya, bagian-bagian yang digerakkan,jenis dan pola gerakannya, posisi maksimal
3
dan minimalnya, perkiraan kecepatannya,dan menetapkan jenis penggerak utamanya.
c. Memilih mekanisme penggerak yang sesuaid. Menggambar bagian-bagian mainan dan
komponen kinematika yang digunakandengan bantuan software CAD.
e. Merakit seluruh bagian mainan di bagianatas dan komponen kinematika di bagianbawah dan melakukan simulasi kinematikadengan bantuan software CAD.
f. Apabila simulasi kinematika sudah sesuaiharapan selanjutnya bisa dilakukan prosespembuatan setiap komponen & merakitnya.
Setelah seluruh tahapan tersebut selesaidilakukan, bisa disusun dokumen pembelajarankinematika menggunakan peraga mainanmekanikal (edukatif).
4. Hasil dan AnalisaPembahasan hasil dilakukan secara berurut
sesuai mekanisme penggeraknya seperti padaTabel 1. Beberapa persyaratan yang harusdipenuhi agar mekanisme dapat bergerakmaupun kesalahan desain yang menyebabkanmekanisme tidak dapat bergerak jugadikemukakan di sini agar para mahasiswamemahami dan dapat menemukan solusinya.
a) Mainan dengan penggerak pulley beltPenggambaran cukup baik penggunaan
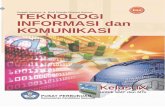
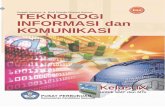
mekanisme pulley belt adalah pada mainanmekanikal mengemudikan sepeda terbangsambil duduk (Gambar 3). Sumbu putar mainrotor (vertikal) saling tegak lurus denganengkol sepeda dan tail rotor (horisontal).
Di sini penggerak utamanya adalah sumbumain rotor yang disamping memutar baling-baling utama juga sekaligus memutar pedalsepeda dan tail rotor melalui cross belt yangdipasang masing-masing antara puli main rotorbawah dengan puli engkol sepeda dan puli mainrotor atas dengan puli tail rotor. Sumberpenggeraknya motor listrik DC dengan 4 batereAA. Apabila mainan ini dijalankan terkesanayunan kaki pada engkol sepedalah yangmenggerakkan ke 2 sumbu rotor tersebut.
Gambar 3: Mainan mekanikal mengemudikansepeda terbang sambil duduk
Agar baling-baling utama, tail rotor, danengkol sepeda dapat berputar diperlukan gearbox untuk memperbesar torsi motor listrik.Konsekuensinya kecepatan putar output-nyaturun. Untuk memberi kesan sumbu engkolsepeda sebagai penggerak utama diameterpulinya dibuat lebih besar dibanding puli mainrotor bawah, sedangkan puli main rotor atasdibuat lebih besar dibanding puli tail rotor.
b) Mainan dengan penggerak cam-followerMekanisme penggerak cam-follower cukup
banyak digunakan mulai dari cam sederhanahingga cam maupun follower-nya berbentukkhusus untuk menghasilkan gerakan-gerakantertentu obyek mainan sesuai yang diinginkan.Pembahasan pada topik ini dibuat berurut dariprofil circular disk cam hingga ellipse cam danpengembangan selanjutnya.
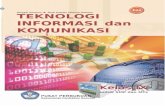
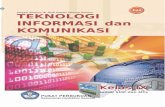
Circular disk cam (Gambar 4) [8]
Gambar 4 : Circular disk cam
Perpindahan linier follower sebagai berikut :x = r R cos (r R) = R(1cos ) (1)
dan kecepatan follower-nya adalah :v = (2n/60) R sin (2)
R R cos
r
4
Penggambaran cukup baik penggunaanmekanisme ini adalah pada mainan mekanikalulat berjalan dan pengangkat kelereng typetangga berjalan, seperti nampak pada Gambar5. Pada ulat berjalan gerakannya akan semakinhalus bila interval sudut setiap cam dibuatsemakin kecil.
Gambar 5: Mainan mekanikal ulat berjalan danpengangkat kelereng type tangga berjalan
Sementara pada tangga berjalan yang terdiridari 6 buah cam dan 6 buah balok anak tangga,dengan perbedaan ketinggian masing-masingsebesar diameter kelereng 9 mm dan di bagianatas permukaan baloknya dibuat miring 7.5o,maka ketika poros cam berotasi ke 6 tanggatersebut juga akan bergerak naik turun sebesarx seperti diperlihatkan pada Gambar 6 [11].
Gambar 6: Pergerakan cam dan a