[Dokumen-129] Modul Praktikum Dasar Sistem Kendali S1 Reguler
![download [Dokumen-129] Modul Praktikum Dasar Sistem Kendali S1 Reguler](https://fdokumen.com/public/t1/desktop/images/details/download-thumbnail.png)
of 27
-
Upload
iqbalmaulana -
Category
Documents
-
view
139 -
download
18
description
modul praktikum
Transcript of [Dokumen-129] Modul Praktikum Dasar Sistem Kendali S1 Reguler
-
Revisi I/REG/08.10. 08
MODUL PRAKTIKUM
DASAR SISTEM KENDALI
LABORATORIUM TEKNIK KENDALI
DEPARTEMEN ELEKTRO FAKULTAS TEKNIK UNIVERSITAS INDONESIA
DEPOK - 2008
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9From: U(1)
To: Y
(1)
oscillatory
underdamped
overdamped
critically damped
-
1
PERCOBAAN I
TRANSIENT RESPONSE DAN TEMPAT KEDUDUKAN AKAR
A. PERCOBAAN TRANSIENT RESPONSE
I. Tujuan Percobaan
1. Mampu menganalisa spesifikasi transient response dari sistem orde 1, orde 2, dan orde
banyak.
2. Mampu menganalisa perbedaan transient response antara sistem orde 1, orde 2, dan
orde banyak.
II. Dasar Teori
Transient response menunjukkan karakteristik output terhadap input dalam domain
waktu. Karakteristik suatu sistem kendali biasanya dilihat dari transient response yang
dimilikinya. Hal ini karena sistem dengan penyimpanan energi tidak bisa merespon seketika
itu juga dan akan selalu menunjukkan transient response ketika sistem itu diberi input atau
gangguan. Untuk menganalisa sistem kendali biasanya digunakan standar input seperti
fungsi impulse, step, ramp, atau sinusoidal. Input yang paling sering digunakan adalah unit
step, karena input ini menyediakan informasi tentang karakteristik transient respons dan
steady state respons dari suatu sistem. Secara umum setiap kita mengaktifkan suatu sistem,
kita mengaktifkan fungsi step.
Gambar diagram blok :
Gambar 1.1.a. Blok diagram suatu sistem kendali
Gambar 1.1.b. Blok diagram suatu sistem kendali yang disederhanakan di mana :
G(s) = Gc(s)Gp(s) dan H(s) = 1 (1.1)
_
+ C(s) C(s) T(s)
R(s) Gc(s) Gp(s)
H(s)
R(s)
Gambar 1.1.a Gambar 1.1.b
-
2
Perhatikan gambar 1.b. Fungsi alih lingkar tertutup dari sistem kendali tersebut
adalah:
)(1)(
)()()(1)()(
)()()(
sGsG
sHsGpsGcsGpsGc
sRsCsT +=+== (1.2)
)(
)(1)()( sRsG
sGsC += (1.3)
Transient response dari sistem adalah invers Transformasi Laplace dari C(s) atau
c(t)=L-1[C(s)]
1. Sistem orde 1 Sistem orde 1 mempunyai bentuk umum fungsi alih sebagai berikut :
)/1(/
)()(
+= sK
sRsC
(1.4)
di mana adalah konstanta waktu 2. Sistem orde 2
Bentuk fungsi alih lingkar tertutup dari sistem orde 2 adalah sebagai berikut:
22
2
2)()(
nn
n
ssRsC
++= (1.5) Dengan merupakan koefisien redaman yang menunjukkan apakah sistem orde-
2 tersebut overdamped, underdamped, critically damped atau oscillatory. Sedangkan
n adalah frekuensi natural.
-
3
Time (sec.)
Am
plitu
de
Step Response
0 5 10 15 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9From: U(1)
To: Y
(1)
oscillatory
underdamped
overdamped
critically damped
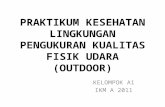
Gambar 1.2. Karakteristik tanggapan waktu suatu sistem
3. Sistem orde 3 Bentuk fungsi alih lingkar tertutup dari sistem orde 3 dapat dimodelkan sebagai
penjumlahan dari tanggapan sistem orde 1 dan orde 2 dengan bentuk umum sebagai
berikut :
22
2
2)/1(/
)()(
nn
n
ssK
sRsC
++++= (1.6)
Dalam perancangan suatu sistem kendali harus diketahui spesifikasi-spesifikasi yang
mendefinisikan karakteristik sistem. Spesifikasi transient response sebagai berikut :
1. Rise time (Tr)
2. Peak time (Tp)
3. Persent Overshoot (%OS)
4. Settling time (Ts)
5. Final Value (Fv) atau nilai steady state
Rumus Untuk Menghitung step respons sistem orde 1:
Tr = 2.2 Ts = 4
)()(lim
0 sRsCFv
s=
-
4
Rumus Untuk Menghitung step respons sistem orde 2:
Tr = ( 1 - 0.4167 + 2.917 2 ) / n Tp = / { n ( 1 - 2 ) 0.5 } %OS = exp (- / ( 1 - 2 ) 0.5 ) Ts = 4 / (n)
)()(lim
0 sRsCFv
s=
-
5
B. PERCOBAAN TEMPAT KEDUDUKAN AKAR I. Tujuan :
1. Mampu memahami prinsip Tempat Kedudukan Akar dan menggambarkan kurva TKA
dari suatu sistem
2. Mampu menganalisa kestabilan sistem dengan menggunakan Tempat Kedudukan
Akar.
II. Dasar Teori
Tempat Kedudukan Akar sebuah sistem merupakan kurva atau tempat kedudukan dari
akar-akar persamaan karakteristik ( pole pole dari fungsi alih lingkar tertutup ) dengan
parameter gain ( K ) yang berubah ubah.
Gambar 1.3 : Diagram blok untuk tempat kedudukan akar
Dari gambar 1.3, persamaan karakteristik sistem dinyatakan dengan
1 + KG (s) H (s) = 0 (1.7)
Nilai s berada pada TKA jika s memenuhi persamaan di atas. Karena s dapat
merupakan bilangan kompleks, maka dari persamaan tersebut, s adalah sebuah titik pada
TKA jika memenuhi syarat magnitude.
1 K = G (s) H (s)
(1.8)
Dengan syarat sudut
oG(s) H(s) = r 180 , dengan r = 1, 3, 5, .... (1.9) Dari kedua syarat tersebut, diturunkan aturan-aturan menggambarkan tempat
kedudukan akar sebagai berikut :
K G (s)
H (s)
_
+ R (s) C (s)
-
6
1. TKA mempunyai sifat simetri terhadap sumbu nyata.
2. Menentukan pole-pole dan zero-zero dari fungsi alih lingkar terbuka sistem KG(s)H(s).
TKA bermula dari pole-pole (untuk K=0) dan berakhir zero-zero ( untuk K ) termasuk zero-zero pada titik tak hingga.
3. Menentukan asimptot dan titik potongnya dengan sumbu nyata dapat dihitung dengan rumus :
180r = (1.10)
dimana 1, 3, 5, .... dan = banyaknya zero pada titik tak hingga dan (letak pole berhingga) (letak zero berhingga)
(pole berhingga) (zero berhingga) =
(1.11)
4. Menentukan daerah cakupan TKA pada sumbu nyata. Tempat Kedudukan Akar
mencakup titik-titik pada sumbu nyata di sebelah kiri frekuensi kritis ( pole-pole dan
zero-zero) nyata yang berjumlah ganjil.
5. Menentukan titik pencar ( titik pisah atau titik temu), yang terdapat diantara akar-akar
( ) '( ) '( ) ( ) 0N s D s N s D s = (1.12) dengan N(s) dan D(s) masing-masing merupakan numerator dan denumerator G(s)H(s).
C. PERALATAN YANG DIGUNAKAN
1. Pentium-based PC dengan sistem operasi Scientific Linux
2. Perangkat lunak Scilab versi 4-1.2
3. Program penunjang praktikum yang dibuat oleh asisten.
D. PERCOBAAN
D.1. Transient Response
1. Dari Scilab command window, masukkan fungsi alih lingkar tertutup (sistem yang
akan diberikan asisten pada waktu percobaan) dengan mengetikkan perintah-
perintah sebagai berikut :
i. Definisikan polynomial s:
=> s = poly(0,'s')
-
7
ii. Buat system linear dalam bentuk transfer function, contoh:
=> q = syslin('c', 10, s^2+2*s+40)
respon:
iii. Definisikan waktu simulasi (misal 10 detik):
=> t = 0:0.05:10;
iv. Simulasikan system:
=> w = csim('step', t, q);
csim(jenis_masukan, waktu, system);
catatan: csim mensimulasikan open loop bukan close loop
v. Untuk melihat step respons dari sistem, ketik perintah:
=> plot(t,w)
2. Amati dan gambar step response-nya serta catat karakteristiknya (Tr, Tp, Ts, %OS,
FV ).
3. Ulangi langkah 1 -3 untuk setiap sistem.
D.2. Tempat Kedudukan Akar
1. Buat fungsi alih sistem dengan mengetikan perintah-perintah berikut pada Scilab
command window :
i. Definisikan polynomial s:
=> s = poly(0,'s')
ii. Buat system linear dalam bentuk transfer function, contoh:
q = syslin('c', 10, s^3+s^2+2*s+40+10*s);
respon:
2. Untuk menggambar TKA, ketikkan perintah sebagai berikut :
evans(q, 100);
-
8
evans(system, gain_maksimal);
3. Setelah muncul kurva TKA, gambar Tempat Kedudukan Akar pada lembar data
percobaan dan tentukan nilai gain pada batas kestabilan apabila ada.
4. Gambar Transient Response pada lembar data percobaan dan catat nilai
karakteristik transient response.
5. Ulangi untuk sistem orde 2 dan orde banyak.
6. Untuk sistem orde 2 dan orde banyak, masukkan nilai H(s) yang diberikan oleh
asisten praktikum.
E. DATA PERCOBAAN
1. Step Response No Fungsi Alih
G(s)
Time Respons Gambar
Tr Tp Ts %OS Fv
2. Tempat Kedudukan Akar
No. Fungsi Alih Fungsi Alih Gambar Closed loop K batas kestabilan
Plant G(s) H(s) TKA poles
-
9
PERCOBAAN II
TANGGAPAN FREKUENSI
DIAGRAM NYQUIST DAN DIAGRAM BODE
A. PERCOBAAN DIAGRAM NYQUIST
I. Tujuan Percobaan :
1. Memahami konsep diagram Nyquist dari suatu sistem.
2. Memahami dan menentukan kestabilan sistem dengan menggunakan diagram Nyquist.
3. Memahami konsep analisa tanggapan frekuensi dengan diagram Nyquist
II. Dasar Teori :
Salah satu metode untuk analisa tanggapan frekuensi adalah dengan diagram Nyquist.
Gambar 2.1
Fungsi alih lingkar tertutup sistem kendali pada gambar di atas dapat dinyatakan
sebagai berikut:
( ) ( )( ) 1 ( ) ( )
C s G sR s G s H s
= + (2.1)
dengan G(s) merupakan fungsi alih maju dan H(s) merupakan fungsi alih umpan balik.
Persamaan karakteristik sistem ini dinyatakan sebagai:
1 ( ) ( ) 0G s H s+ = (2.2) Harga-harga s yang memenuhi persamaan karakteristik sistem merupakan nilai-nilai
pole sistem tersebut, yang letaknya menentukan kestabilan sistem.
R(S) C(S)
-
10
Dari persamaan karakteristik itu terlihat bahwa fungsi yang perlu ditinjau adalah
G(s)H(s), yang merupakan fungsi bilangan kompleks. Untuk analisa tanggapan frekuensi
dilakukan substitusi s j= , sehingga persamaan karakteristik menjadi: 1 ( ) ( ) 0G j H j + = atau ( ) ( ) 1G j H j = (2.3)
Pada diagram Nyquist, tanggapan frekuensi fungsi kompleks ( ) ( )G j H j dapat digambarkan pada bidang kompleks dengan memasukkan nilai frekuensi dari 0 = sampai dengan = (tak terhingga). Penggambaran fungsi kompleks dilakukan dengan menguraikannya menjadi besaran magnitude dan fasa sebagai berikut:
Besaran magnitude = ( ) ( )G j H j (2.4) Besaran fasa = ( ) ( )G j H j (2.5)
Dengan menentukan rentang frekuensi yang diinginkan, misalnya dari nol s.d. 10 rad/s
maka dapat disusun tabel 2.1 :
Tabel 2.1 Tabel magnitude dan fasa diagram Nyquist
Frekuensi (rad/s) Magnitude ( ) ( )G j H j (dB)
Sudut fasa
( ) ( )G j H j (o)
0
0.5
1
2
10
Kriteria Nyquist menyatakan bahwa sistem akan stabil apabila pada bidang sebelah
kanan kurva ( ) ( )G j H j tidak melingkupi titik (-1,0). Tingkat kestabilan sistem dapat diukur dengan Gain Margin (GM) dan Phase Margin (PM), yang didefinisikan sebagai
berikut:
-
11
Gain Margin (GM) = 1a
= 20 log10 a (satuan dB) (2.6)
Phase Margin (PM) = -180 + (2.7) Harga pada PM adalah nilai sudut fasa saat kurva Nyquist berpotongan dengan
lingkaran berjari-jari satu. Pada sistem yang stabil, GM dan PM-nya selalu positif. Semakin
besar nilai GM dan PM, maka semakin stabil sistem tersebut.
Menentukan stabilitas sistem dengan persamaan :
Z = N + P (2.8)
N : jumlah perputaran dari origin yang melingkupi titik (-1,0)
P : jumlah pole dari fungsi alih open-loop G(s)H(s) yang terletak di sebelah kanan
sumbu imaginer (RHP : Right Half s-Plane)
Z : jumlah akar persamaan karakteristik sistem pada RHP.
Sistem stabil jika Z = 0.
B. PERCOBAAN DIAGRAM BODE I. Tujuan Percobaan
1. Memahami konsep diagram Bode pada suatu sistem.
2. Memahami konsep analisa tanggapan frekuensi dengan menggunakan diagram Bode
3. Memahami dan menentukan kestabilan sistem dengan menggunakan diagram Bode
II. Dasar Teori
G(s)
-
+R(s) C(s)
H(s)
Gambar 2.2. diagram blok sistem kendali dengan umpan balik
-
12
Jika suatu sistem memiliki fungsi alih G(s)H(s), maka tanggapan frekuensi dapat
diperoleh dengan mensubstitusi s j= . Sehingga diperoleh responnya adalah G(j)H(jw). Karena G(j)H(jw) adalah suatu bilangan kompleks, maka untuk menggambarkannya dibutuhkan dua buah grafik yang merupakan fungsi dari , yaitu: 1. Grafik magnitude terhadap frekuensi.
2. Grafik fasa terhadap frekuensi.
Diagram Bode merupakan salah satu metode analisa dalam perancangan sistem
kendali yang memperhatikan tanggapan frekuensi sistem yang diplot secara logaritmik.
Dari kedua buah grafik yang diplot tersebut, yang perlu diperhatikan adalah nilai dari
Gain Margin (GM) dan Phase Margin (PM). Nilai GM besarnya adalah 1G
, dengan G
adalah gain saat kurva grafik fasa memotong nilai 180o. Nilai GM umumnya dinyatakan
dalam dB, yang dihitung dengan 1020log ( )GM . Sementara PM adalah nilai fasa dalam
derajat saat kurva grafik magnitude dengan frekuensi memotong nilai 0 dB.
Dari metode analisa Tempat Kedudukan Akar (TKA) diketahui bahwa suatu sistem
lingkar tertutup dinyatakan stabil apabila letak akarnya memotong sumbu j, atau 1 ( ) ( ) 0KG j H j + = . Dalam nilai magnitude, ini dinyatakan sebagai nilai mutlak
( ) ( ) 1KG j H j = , dan nilai fasanya adalah ( ) ( ) 180KG j H j = . Keuntungan dari metode ini dibandingkan dengan metode lainnya adalah pole dan zero nyata dapat terlihat
dengan mudah.
Tanggapan frekuensi dari suatu sistem, yang dapat disusun baik dengan pendekatan
perhitungan manual, maupun dengan software SCILAB, dipengaruhi oleh beberapa
komponen dalam sistem fungsi alih yang berpengaruh s.b.b.:
1. Bati (gain) konstan
2. Pole dan zero yang terletak pada titik awal (origin)
3. Pole dan zero yang tidak terletak pada titil awal.
4. Pole dan zero kompleks
5. Waktu tunda ideal.
-
13
C. PERALATAN
1. Pentium-based PC dengan sistem operasi Scientific Linux
2. Perangkat lunak SCILAB versi 4.1.2
3. Program penunjang praktikum yang dibuat oleh asisten.
D. Langkah Percobaan
1. Buat fungsi alih sistem dengan mengetikan perintah-perintah berikut pada SCILAB
command window :
=> G = syslin (c, numerator, denominator)
2. Untuk menggambar bode ketik perintah
=> bode(system, frekuensi_awal, frekuensi_akhir, judul) pada command window dan
untuk menggambar nyquist ketik perintah
=> nyquist(system, frekuensi_awal, frekuensi_akhir, judul)
3. Setelah muncul diagram Bodenya dan Nyquist nya, gambar bode serta nyquist yang ada
pada lembar data percobaan.
F. DATA PERCOBAAN
1. Diagram Nyquist
Fungsi Alih G(s)H(s) Orde Tipe GM GM PM PM Diagram Nyquist
2. Diagram Bode
Fungsi Alih G(s)H(s) Orde Tipe GM GM PM PM Diagram Bode
-
14
PERCOBAAN III
PERANCANGAN PENGENDALI MENGGUNAKAN TKA
I. Tujuan Percobaan
Praktikan mampu memahami dan merancang pengendali PID dengan menggunakan
metode Tempat Kedudukan Akar (TKA / Root Locus).
II. Dasar Teori
Gambar 3.1 : Diagram blok sistem dengan kompensator
Dalam perancangan sistem kendali, kompensator dirancang sedemikian rupa
sehingga closed-loop pole dominan memenuhi spesifikasi ( %OS, Ts, , n ) yang diinginkan. Fungsi alih kompensator yang biasa digunakan adalah :
( )( )( )
OC
O
K s zG ss p
+= + (3.1)
Untuk menentukan persamaan pengendali Gc(s), salah satunya menggunakan
teknik pole cancellation (penghilangan pole) dengan TKA dimana kita menentukan nilai
zero pada Gc(s) yang sama pada satu pole pada sistem, yaitu pole yang ingin dihilangkan,
sehingga TKA-nya melalui titik yang diinginkan dengan spesifikasi respons yang diminta.
Dalam metode ini juga diasumsikan efek pada tangggapan closed-loop pole tidak dominan
sehingga dengan demikian dapat diabaikan.
Gc(sGp (s)
H (s)
_
+ R (s) C (s)
-
15
Perancangan Pengendali PID menggunakan TKA
Fungsi alih pengendali PID: 1 2( )( )c c
c
s z s zK
s+ +
. Dari fungsi alih ini, diketahui
bahwa pengendali PID memiliki satu buah pole di origin dan dua buah zero. Pada penentuan
zero, kita dapat melakukan dengan dua cara, yaitu dengan menganggap 1 2c c
z z= atau
1 2c cz z . Langkah-langkah penentuan zero tersebut dapat dilakukan sebagai berikut. 1. Gambar letak pole dan zero open loop sistem dan pengendali yang telah diketahui
pada bidang s.
2. Tentukan desired closed loop sesuai dengan spesifikasi karakteristik yang diinginkan.
Umumnya kita gunakan persamaan :
dn js =2,1 (3.2) dengan nilai , n, dan d dapat ditentukan berdasarkan spesifikasi karakteristik yang
digunakan.
3. Jika kita menganggap 1 2c c
z z= , maka persamaan pada langkah 4 dapat langsung digunakan dengan memperhatikan bahwa perhitungan sudut cz dilakukan dua kali. Jika
kita menganggap 1 2c c
z z , maka salah satu zero (misalnya 1c
z ) ditentukan secara trial
and error. Setelah itu, tentukan 2c
z menggunakan persamaan pada langkah 4, 5, dan 6.
-
16
4.
Dengan trigonometri, tentukan 1, 2, 3 dan 1 , 2 , 3 kecuali 1cz Setelah itu tentukan
1cz dengan menggunakan kriteria sudut :
( ) 018012 += kzeropole dengan k = 0, 1, 2, (3.3) Dengan trigonometri, dapat ditentukan 1cz
nc
dz zc
= 11tan (3.4) Setelah
1cz diketahui, letak zero PID dapat diketahui pula.
5. Kita pilih 2cz = -0,5. Kemudian untuk kriteria penguatan cK dapat ditentukan dengan pole
czero
lK
l=
atau
( )( ) ( ) 1.2,1
21 =++=ss
pcc
c sGszszsK (3.5)
Sehingga didapat nilai cK
6. Akhirnya, dapat disusun
( )( )s
zszsKsG cccc 21)(++= (3.6)
zc
Desired closed loop
l1l2
l3l4
-
17
III. Peralatan yang Digunakan
1. Pentium-based PC dengan sistem operasi Scientific Linux
2. Perangkat lunak SCILAB versi 4.1.2
3. Program penunjang praktikum yang dibuat oleh asisten.
IV. Langkah Percobaan
Percobaan ini bertujuan untuk merancang pengendali PID dengan menggunakan TKA.
Pengendali PID yang telah didapatkan selanjutnya akan diujikan pada sistem untuk melihat
pengaruh dari penambahan pengendali tersebut.
1. Jalankan program scilab.
2. Lihat model plant yang telah dipersiapkan
3. Tentukan parameter-parameter pengendali PID (Ti dan Td) dengan menggunakan TKA sesuai dengan karakteristik yang diinginkan.
4. Ujikan parameter-parameter pengendali PID yang telah didapat di atas pada system closed-loop.
-
18
PERCOBAAN IV
PERANCANGAN PENGENDALI MENGGUNAKAN
DIAGRAM BODE
I. Tujuan Percobaan
Praktikan mampu memahami dan merancang pengendali PID dengan menggunakan
metode Tempat Kedudukan Akar (TKA / Root Locus).
II. Dasar Teori
Salah satu kegunaan diagram Bode adalah untuk melakukan perancangan pengendali
khususnya pengendali fasa tertinggal (phase lag) dan fasa mendahului (phase lead) ataupun
pengendali proporsional.
Bentuk umum dari pengendali di atas adalah:
1
( )1
oc
p
sG s s
+= + (4.1)
Secara umum jika o > p, maka pengendali disebut fasa tertinggal, dan apabila o < p maka disebut pengendali fasa mendahului.
Pada pengendali fasa mendahului, zero lebih dekat ke titik awal daripada pole,
sehingga menambah menambah sudut positif pada syarat sudut tempat kedudukan akar
(magnitude pole lebih besar dari pada magnitude zero). Sementara pada pengendali fasa
Gc(s) G(s)
-
+R Y E U
Gambar 4.1 sistem kendali umpan balik satuan dengan pengendali
-
19
tertinggal, pole lebih dekat ke titik asal daripada zero, sehingga menambah sudut negatif
pada syarat sudut tempat kedudukan akar (magnitude pole lebih kecil dibandingkan
magnitude zero). Dan pada pengendali proporsional, komponennya berupa sebuah
konstanta. Tujuan pemberian pengendali ini adalah memperbaiki respon sistem agar sesuai
dengan keinginan kita.
Pengendali Phase Lead dengan Diagram Bode
Berikut ini akan dijelaskan langkah-langkah perancangan pengendali phase lead
dengan menggunakan diagram Bode.
1. Dari fungsi alih plant, digambarkan diagram Bodenya sehingga diperoleh GM dan PM
sistem sebelum ditambahkan pengendali.
2. Tentukan m (Phasa Maksimum Controller), yaitu besarnya sudut yang harus ditambahkan ke PM awal agar PM sesuai dengan spesifikasi ditambah dengan faktor
koreksi yang digunakan (5o 12o)
3. Cari nilai dari persamaan : 1 sin1 sin
m
m
= + (4.2)
4. m harus berada pada frekuensi dimana magnitude fungsi alih uncompensated process adalah sebesar :
10120log
= (4.3)
Nilai m ini diperoleh dengan dengan melihat pada saat diagram magnitude bode
sebesar 10120log
= dB
5. Cari letak zero dan pole controller dari m yang diketahui :
Zero = 1 mT = dan Pole = 1
T (4.4)
6. Persamaan Phase-Lead controller :
-
20
( )1
11c
sTG s
sT
+=
+ (4.5)
Pengendali Phase Lag dengan Diagram Bode
Berikut ini akan dijelaskan langkah-langkah perancangan pengendali phase lag dengan
menggunakan diagram Bode.
1. Dari fungsi alih plant, digambarkan diagram Bodenya sehingga diperoleh GM, PM, Kv
sistem sebelum ditambahkan pengendali.
2. Gambarkan Kv baru yang diinginkan pada diagram Bode yang telah dibuat.
3. Geser grafik magnitude Bode sehingga diperoleh PM sesuai dengan yang diinginkan
ditambah dengan faktor koreksi (5o 12o) sehingga diperoleh gc yang baru.
4. Kemudian di antara satu oktaf sampai satu dekade sebelum gc diletakkan zero pengendali, diperoleh zc.
5. Penambahan zero pengendali akan membuat grafik magnitude sebelumnya mengalami
penambahan kemiringan sebesar 20 dB/decade. Perpotongan garis ini dengan garis Kv
baru merupakan letak pole pengendali, diperoleh pc.
6. Besarnya magnitude pada 010 / secrad = digunakan untuk mencari besarnya gain pengendali (Kc) dengan menggunakan rumus :
( )20log . ....c lamaK K dB= (4.6) ( ) cc c
c
s zG s Ks p+= + (4.7)
III. Peralatan yang digunakan
1. Pentium-based PC dengan sistem operasi Scientific Linux
2. Perangkat lunak SCILAB versi 4.1.2
3. Program penunjang praktikum yang dibuat oleh asisten.
-
21
IV. Langkah percobaan
1. Jalankan program scilab.
2. Lihat model plant yang telah dipersiapkan
3. Lakukan analisa bode :
- Buat fungsi transfer pada scilab berdasarkan model plant yang dipersiapkan.
- Dengan menggunakan fungsi bode, lihat plot Bode yang ditampilkan.
- Gambar diagram Bode yang terlihat pada window Scilab Graphic.
4. Rancang pengendali sesuai dengan kriteria yang diinginkan
-
22
PERCOBAAN V
PENGENDALIAN PRESSURE PROCESS RIG 38-714
I. Tujuan Percobaan
Praktikan mampu memahami langkah-langkah dalam pengendalian suatu plant.
II. Dasar Teori
Dalam merancang sebuah pengendali, diperlukan langkah-langkah yang dapat
dibedakan menjadi dua tahapan besar, yaitu pemodelan sistem dan desain pengendali.
Pada percobaan ini, praktikan akan melihat secara langsung tahapan-tahapan sebuah
sistem dikendalikan.
i. Pemodelan Sistem
Sebelum membuat pengendali yang akan mengendalikan sebuah sistem,
pertama-tama kita harus membuat model dari sistem yang akan dikendalikan. Model
sistem yang dibuat adalah model matematis yang merepresentasikan sistem. Dalam
membuat model matematis sistem, dapat digunakan berbagai pendekatan, seperti
pemodelan fisik (menggunakan hukum-hukum fisika, biologi, kimia, dll), sistem
identifikasi (memodelkan berdasarkan hubungan input-output), model berbasis
pengetahuan (fuzzy logic, neural network), dll.
ii. Perancangan Pengendali
Setelah model matematis diketahui, baru pengendali didisain berdasarkan jenis
model yang didapat. Jika model yang didapat berupa aturan-aturan fuzzy, maka
pengendali yang dirancang harus mengendalikan aturan-aturan fuzzy tersebut. Jika
model berupa fungsi transfer, maka pengendali yang dirancang harus mengendalikan
parameter-parameter fungsi transfer.
Pengendali dirancang dengan menggunakan parameter-parameter pengendali
(parameter yang menunjukkan apa yang diinginkan dari perancang pengendali
terhadap sistem). Dalam modul perancangan pengendali sebelumnya, karena model
-
23
berupa transfer fungsi, parameter-parameter ini bisa berupa Rise Time, Settling Time,
dll.
iii. Penjelasan Sistem Pengendali
Sistem pengendali yang digunakan adalah sistem yang digunakan oleh lab
kendali untuk keperluan pengukuran dan mengetes algoritma pengendali digital
yang telah didisain. Sistem ini terdiri dari bagian komputer yang bertugas
menjalankan algoritma pengendali dan ADC / DAC yang berfungsi sebagai
antarmuka komputer dengan plant.
iv. Pressure Process Rig 38-714
Dalam percobaan ini, akan didemonstrasikan begaimana sebuah pengendali
dirancang. Sistem yang akan diteliti dalam praktikum ini adalah Pressure Process
Rig (Feedback 38-714). Sesuai namanya, alat ini digunakan untuk mengendalikan
tekanan gas yang berada di dalam alat tersebut.
Gambar 3.2 (kiri) Pressure Process Rig, (kanan) komputer, Process Controller, dan Process Interface
Alat/sistem ini terdiri dari:
Sebuah Pneumatic Control Valve, Sebuah I/P Converter, Sebuah Blok Orifice,
-
24
Sebuah Flowmeter, Enam buah pengukur tekanan (Gauge), Dua buah Regulator tekanan, Sebuah Sensor tekanan, Sebuah Sensor perbedaan tekanan, Sebuah Air Receiver, Tujuh buah Valve, dan Beberapa buah saluran pipa yang menghubungkan komponen-komponen di atas.
Sistem ini membentuk sebuah sistem Single Input Single Output (SISO) dengan
sumber input berupa air compressor. Sistem ini juga memungkinkan kita untuk dapat
mempelajari operasi dari setiap komponennya dan mempelajari koneksi sistem
tersebut ke pengendali elektrik melalui transduser tekanan/arus.
Sistem ini memiliki 2 buah Regulator (R1 dan R2), 6 buah indikator tekanan
(G1, G2, , G6), dan 7 buah valve (V1, V2, , V7). Regulator R1 digunakan untuk
mengendalikan tekanan yang diukur oleh G1. Regulator R2 digunakan untuk mengatur
tekanan yang diukur oleh G3 atau G4 atau G5. Sementara indikator tekanan G6
digunakan untuk menunjukkan tekanan pada air receiver. Output yang akan
dikendalikan pada sistem ini ada dua buah, yaitu tekanan pada G5 dan perbedaan
tekanan antara G4 dan G5. Pressure transmitter (38-461) berfungsi mengubah output
pressure sensor agar menjadi standard input yang sesuai bagi controller. Differential
Pressure transmitter (38-462) berfungsi mengubah output differential pressure sensor
agar menjadi standard input yang sesuai bagi controller. Untuk melengkapi sistem ini
diperlukan Digital Display Module (38-490) yang digunakan sebagai indikator digital
untuk tekanan, Process Interface (38-200), dan Process Controller (38-300).
v. Koneksi Process Interface 38-200 ke CPU
Untuk menghubungkan CPU (yang bekerja berbasis digital) dan sistem (yang
bekerja berbasis analog), dibutuhkan suatu Analog-to-Digital Coverter (ADC). ADC
yang digunakan pada percobaan adalah PCI-6024E, yang ditanamkan pada
motherboard CPU. Koneksi antara ADC dengan Process Interface (Feedback 38-200)
ini membutuhkan CB-68LP dan konektor R6868.
-
25
Gambar 3.3 National Instrument PCI-6024E/CB-68LP Academic Starter Kit
CB-68LP merupakan alat yang digunakan untuk menyebarkan 68 pin yang
terdapat pada konektor R6868 sehingga setiap pin tersebut dapat dihubungkan dengan
mudah ke peralatan listrik lain sesuai kebutuhan. Nomor channel dan pin dari CB-
68LP terdapat pada lampiran. Penomoran channel dimulai dari channel 0 (CH0).
Dalam penggunaannya setiap channel mempunyai pasangan, yaitu channel n, channel
n+8, dan ground. Jadi channel 0 berpasangan dengan channel 8 (+ ground), channel 1
berpasangan dengan channel 9 (+ ground), dan seterusnya. Penggunaan channel ini
berpengaruh pada konfigurasi pada Analog Input yang akan dibahas pada bagian
selanjutnya.
Koneksi dapat dilakukan dengan menghubungkan CB-68LP dan PCI-6024E
(yang tertanam dalam CPU) dengan menggunakan konektor R6868 (68 pin).
Koneksi selanjutnya, yaitu antara CB-68LP dan Process Interface (38-200) dapat
dilihat pada gambar berikut.
-
26
Gambar 3.4 Koneksi Process Interface 38-200 ke CB-68LP
Keterangan: Pin 34 dan Pin 63 pada CB-68LP dijumper ke node groundnya masing-
masing, yaitu pin 67 dan 29.
CoverPERCOBAAN IPERCOBAAN TRANSIENT RESPONSEPERCOBAAN TEMPAT KEDUDUKAN AKAR
PERCOBAAN IIPERCOBAAN DIAGRAM NYQUISTPERCOBAAN DIAGRAM BODE
PERCOBAAN IIIPERCOBAAN IVPERCOBAAN V