DESAIN PENGEMBANGAN PERANGKAT KERAS SISTEM …ppi.kim.lipi.go.id/download/prosiding/2016/24. Desain...
21
DESAIN PENGEMBANGAN PERANGKAT KERAS SISTEM KENDALI ALAT PENGOLAH AIR GAMBUT Bambang Herlambang 1 , Sutrisno Salomo Hutagalung 2 , Imamul Muchlis 2 1 Pusat Penelitian Metrologi – LIPI Kompleks PUSPIPTEK Gedung 420, Setu, Tangerang Selatan, 15314 2 Pusat Penelitian Sistem Mutu dan Teknologi Pengujian – LIPI Kompleks PUSPIPTEK Gedung 417, Setu, Tangerang Selatan, 15314 INTISARI Dalam penelitian ini dilakukan pengembangan desain sistem kendali untuk sistem pengolah air gambut. Pengendalian sistem menggunakan PLC dengan pertimbangan fleksibilitas dan kemudahan dalam pemrograman dan instalasi. Ada empat hal yang menjadi parameter dalam pengontrolan ini yaitu debit aliran, pH, konduktivitas dan tinggi permukaan. Hal tersebut dilakukan dengan mengendalikan saklar, katup dan pompa. PLC dapat melakukan konversi sinyal-analog ke engineering unit, pengendalian variabel dengan metoda PID (Proportional, Integral, Derivative) dan TPO (Time Proportional Output). Komputer HMI (human machine interface) digunakan untuk mengoperasikan sistem proses, terdiri dari program interaktif; animasi proses, setup parameter, diagnosa sistem proses, trending/loging. Komputer notebook sebagai EWS (Engineer Work Station) berfungsi sebagai pengembangan program PLC dan diagnostik program. Hasil simulasi menunjukkan bahwa desain sistem kendali berfungsi dengan baik dan pengukuran parameter fisis dapat ditampilkan pada layar HMI. Kata Kunci : Sistem kendali, PLC, PID, TPO, HMI, air gambut. ABSTRACT In this research, the development of control system design for water treatment systems peat has been done. The control system uses PLC by considerations of flexibility and ease of programming and installation. There are four things that the parameters in this control that flow, pH, conductivity and level. This is done by controlling the switches, valves and pumps. PLC can convert analog signals to engineering units, with variable control method PID (Proportional, Integral, Derivative) and TPO (Time Proportional Output). Computer HMI (Human Machine Interface) is used to operate the system process, consists of interactive programs; the animation process, setup parameters, system diagnostics process, trending / logging. Notebook computer as EWS (Engineer Work Station) serves as a PLC program development and diagnostic programs. The simulation results showed that the design of the control system is functioning properly and measurement of physical parameters can be displayed on the HMI screen. Keywords : control systems, PLC, PID, TPO, HMI, peat water. 1. PENDAHULUAN Sistem pengolah air gambut merupakan suatu alat yang digunakan untuk mengolah air gambut menjadi air bersih. Sistem ini mampu mengurangi kadar kimia dan
-
Upload
truongquynh -
Category
Documents
-
view
223 -
download
0
Transcript of DESAIN PENGEMBANGAN PERANGKAT KERAS SISTEM …ppi.kim.lipi.go.id/download/prosiding/2016/24. Desain...

DESAIN PENGEMBANGAN PERANGKAT KERAS SISTEM
KENDALI ALAT PENGOLAH AIR GAMBUT
Bambang Herlambang1, Sutrisno Salomo Hutagalung2, Imamul Muchlis2
1Pusat Penelitian Metrologi – LIPI
Kompleks PUSPIPTEK Gedung 420, Setu, Tangerang Selatan, 15314
2 Pusat Penelitian Sistem Mutu dan Teknologi Pengujian – LIPI
Kompleks PUSPIPTEK Gedung 417, Setu, Tangerang Selatan, 15314
INTISARIDalam penelitian ini dilakukan pengembangan desain sistem kendali untuk sistem pengolah air gambut. Pengendalian sistem menggunakan PLC dengan pertimbangan fleksibilitas dan kemudahan dalam pemrograman dan instalasi. Ada empat hal yang menjadi parameter dalam pengontrolan ini yaitu debit aliran, pH, konduktivitas dan tinggi permukaan. Hal tersebut dilakukan dengan mengendalikan saklar, katup dan pompa. PLC dapat melakukan konversi sinyal-analog ke engineering unit, pengendalian variabel dengan metoda PID (Proportional, Integral, Derivative) dan TPO (Time Proportional Output). Komputer HMI (human machine interface) digunakan untuk mengoperasikan sistem proses, terdiri dari program interaktif; animasi proses, setup parameter, diagnosa sistem proses, trending/loging. Komputer notebook sebagai EWS (Engineer Work Station) berfungsi sebagai pengembangan program PLC dan diagnostik program. Hasil simulasi menunjukkan bahwa desain sistem kendali berfungsi dengan baik dan pengukuran parameter fisis dapat ditampilkan pada layar HMI.
Kata Kunci : Sistem kendali, PLC, PID, TPO, HMI, air gambut.
ABSTRACTIn this research, the development of control system design for water treatment systems peat has been done. The control system uses PLC by considerations of flexibility and ease of programming and installation. There are four things that the parameters in this control that flow, pH, conductivity and level. This is done by controlling the switches, valves and pumps. PLC can convert analog signals to engineering units, with variable control method PID (Proportional, Integral, Derivative) and TPO (Time Proportional Output). Computer HMI (Human Machine Interface) is used to operate the system process, consists of interactive programs; the animation process, setup parameters, system diagnostics process, trending / logging. Notebook computer as EWS (Engineer Work Station) serves as a PLC program development and diagnostic programs. The simulation results showed that the design of the control system is functioning properly and measurement of physical parameters can be displayed on the HMI screen.
Keywords : control systems, PLC, PID, TPO, HMI, peat water.
1. PENDAHULUAN
Sistem pengolah air gambut merupakan suatu alat yang digunakan untuk
mengolah air gambut menjadi air bersih. Sistem ini mampu mengurangi kadar kimia dan

sifat fisik dalam air gambut yang melewati nilai ambang batas sehingga sesuai dengan
standar air bersih yang ditetapkan dalam Permenkes 2010 No
492/MENKES/PER/IV/2010[1]. Seperti diketahui air gambut merupakan jenis air
permukaan dari tanah bergambut dengan ciri yang sangat mencolok dan tidak layak
dikonsumsi karena warnanya merah kecoklatan (124 - 850 unit PtCo), mengandung zat
organik tinggi (138 – 1560 mg/lt KMnO4 ) serta zat besi yang cukup tinggi, rasa asam,
pH 3-5 dan tingkat kesadahan rendah [2].
Dalam kegiatan penelitian Riset Kompetitif LIPI 2012 tahap I telah berhasil
dibuat sistem pengolah air gambut dengan metoda oksidasi lanjut[3,4]. Metoda oksidasi
lanjut merupakan metoda penguraian senyawa polutan dalam air dengan cara oksidasi
oleh radikal hidroksil (OH) menjadi senyawa yang tidak berbahaya. Dalam penelitian ini
oksidasi lanjut yang digunakan adalah kombinasi dari ozon dan UV (ultra violet). Ozon
dimasukkan ke dalam air gambut akan terurai menjadi radikal OH bila disinari dengan
UV. Radikal OH yang terbentuk akan bereaksi dengan senyawa polutan dalam air
menjadi senyawa lain yang tidak berbahaya.
Sistem tahap I telah berhasil diujicobakan dan memberikan hasil yang baik dari
segi kinerja dan kualitas air yang dihasilkan. Namun sistem tersebut masih memiliki
kekurangan yaitu pengoperasiannya masih dilakukan secara manual sehingga kurang
praktis untuk diterapkan di lapangan. Oleh karena itu diperlukan solusi untuk mengatasi
kekurangan ini sehingga sistem dapat dioperasikan secara lebih mudah dan terkontrol.
Untuk meningkatkan faktor ketepatan, keamanan, kemudahan dalam
pengoperasian di lapangan dan kualitas air olahan, maka pada penelitian tahap II ini
dilakukan pengembangan sistem tahap I dengan penambahan teknologi instrumentasi,
sistem pengendalian otomatis dan sistem osmosa balik. Teknologi instrumentasi
digunakan untuk mendeteksi parameter fisis yang ingin diketahui seperti pH, aliran, level
dan sebagainya. Sistem pengendalian otomatis digunakan untuk melakukan aksi terhadap
masukan yang ada seperti menjalankan pompa, membuka kran, menyalakan suatu alat
dan sebagainya. Sedangkan sistem osmosa balik merupakan sistem filtrasi untuk
menyaring partikel padatan berukuran micron untuk meningkatkan kualitas air olahan[5].
Tulisan ini membahas studi awal desain perangkat keras pengembangan sistem
pengolah air gambut tahap I. Desain perangkat keras sistem control didasarkan pada
skema dan cara kerja sistem tahap II hasil pengembangan sistem tahap I. Dalam
perancangan sistem kendali ini perlu diketahui parameter fisis yang ingin diketahui dan
aksi yang diinginkan berdasarkan input yang masuk ke pengontrol. Pada pengontrol perlu

dimasukkan program aplikasi untuk melakukan pengukuran dan pengendalian sistem.
Untuk memudahkan proses pengendalian maka perlu dibuat perangkat lunak aplikasi
yang menggambarkan proses pengendalian pada computer. Program aplikasi tersebut
merupakan penghubung antara operator dan mesin yang disebut dengan Human Machine
Interface (HMI).
2. DASAR TEORI
Sistem Kontrol Otomatis
Pengontrolan otomatis adalah pengontrolan suatu besaran proses apabila terjadi
penyimpangan atau deviasi maka akan terjadi suatu usaha perbaikan secara otomatis
sehingga dapat membatasi penyimpangan atau deviasi tersebut dari nilai yang
dikehendaki [6]. Di dalam pengontrolan otomatis peran operator di dalam pengontrolan
manual digantikan oleh suatu alat yang disebut controller. Tugas membuka atau menutup
valve tidak lagi dikerjakan oleh operator tetapi atas perintah dari controller. Operator
hanya perlu menentukan besarnya set point dari controller dan pada akhirnya semua
bekerja secara otomatis. Untuk keperluan pengontrolan otomatis, valve harus dilengkapi
dengan alat yang disebut dengan actuator sehingga unit valve sekarang menjadi unit yang
disebut control valve. Semua peralatan pengendalian ini disebut sebagai instrumentasi
pengendalian proses.
Sistem pengendalian otomatis memegang peranan yang penting dalam
pengoperasian plant pengolahan air yang aman dan handal dalam penyediaan air
bersih/air minum. Sistem pengendalian otomatis menyediakan semua interlocks untuk
mengendalikan pompa, saklar dan katup untuk menyediakan operasi yang aman dan
handal. Dalam beberapa aplikasi, sistem pengendalian otomatis dirancang untuk
menyesuaikan dosis dan laju aliran berdasarkan kebutuhan parameter yang diinginkan.
Sistem pengendalian otomatis dapat melakukan pemrosesan sinyal dan menyediakan data
persediaan air yang digunakan dalam plant, juga dapat mengendalikan dan merekam data
waktu kontak dengan baik yang diperlukan dalam optimalisasi sistem. Selain itu sistem
otomatisasi memiliki kemampuan untuk melakukan perhitungan secara berulang-ulang
dan menyimpan hasilnya dalam format database yang berguna untuk pengawasan.
Ada dua macam sistem pengontrolan yaitu pengontrolan loop terbuka dan
tertutup. Pengontrolan loop terbuka adalah sistem kontrol yang keluarannya tidak
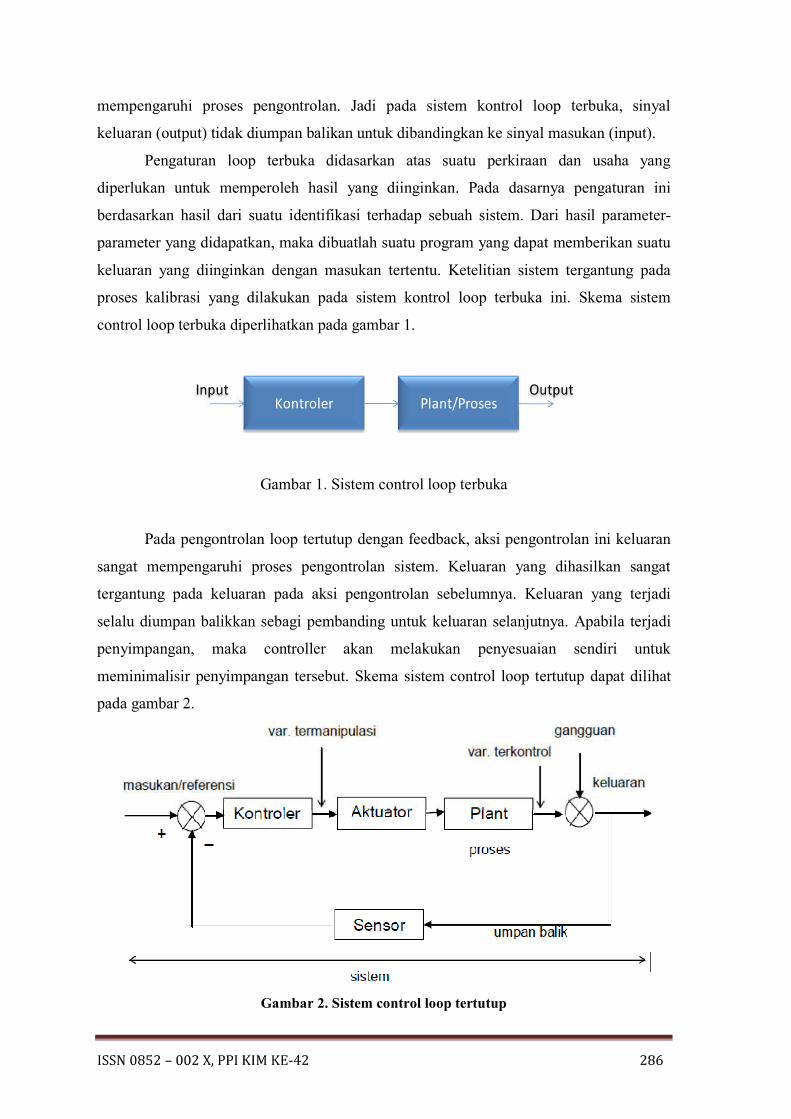
mempengaruhi proses pengontrolan. Jadi pada sistem kontrol loop terbuka, sinyal
keluaran (output) tidak diumpan balikan untuk dibandingkan ke sinyal masukan (input).
Pengaturan loop terbuka didasarkan atas suatu perkiraan dan usaha yang
diperlukan untuk memperoleh hasil yang diinginkan. Pada dasarnya pengaturan ini
berdasarkan hasil dari suatu identifikasi terhadap sebuah sistem. Dari hasil parameter-
parameter yang didapatkan, maka dibuatlah suatu program yang dapat memberikan suatu
keluaran yang diinginkan dengan masukan tertentu. Ketelitian sistem tergantung pada
proses kalibrasi yang dilakukan pada sistem kontrol loop terbuka ini. Skema sistem
control loop terbuka diperlihatkan pada gambar 1.
Gambar 1. Sistem control loop terbuka
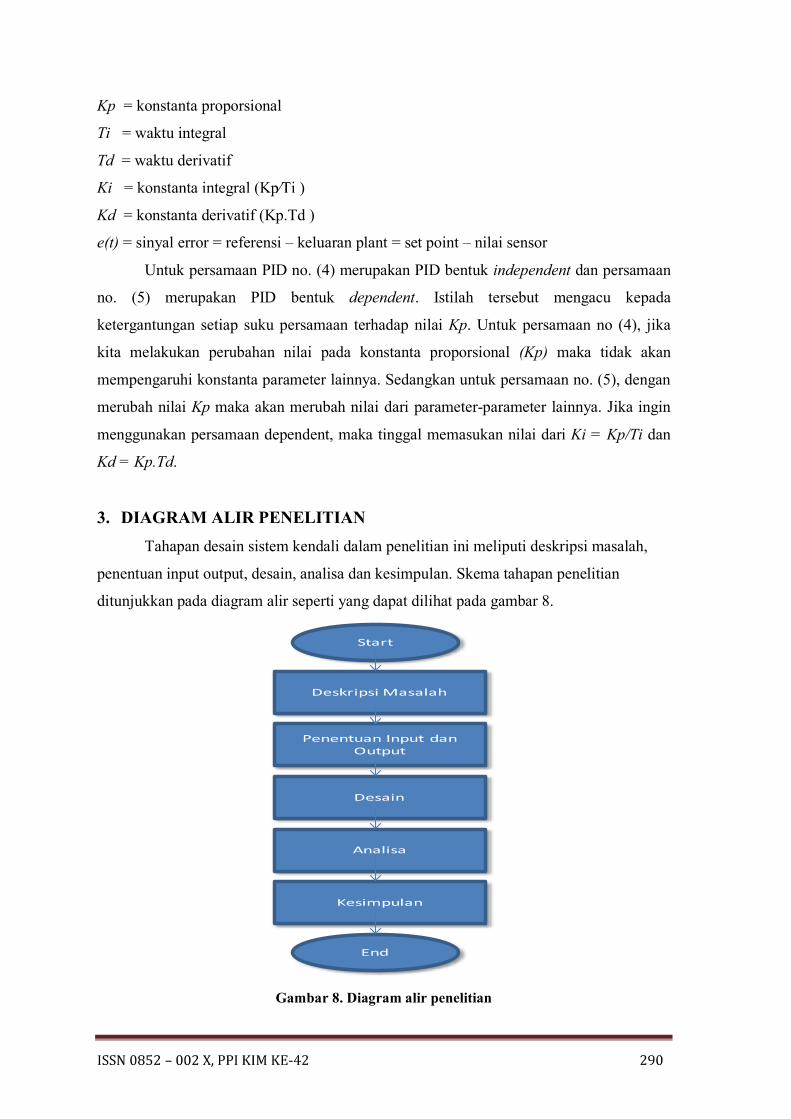
Pada pengontrolan loop tertutup dengan feedback, aksi pengontrolan ini keluaran
sangat mempengaruhi proses pengontrolan sistem. Keluaran yang dihasilkan sangat
tergantung pada keluaran pada aksi pengontrolan sebelumnya. Keluaran yang terjadi
selalu diumpan balikkan sebagi pembanding untuk keluaran selanjutnya. Apabila terjadi
penyimpangan, maka controller akan melakukan penyesuaian sendiri untuk
meminimalisir penyimpangan tersebut. Skema sistem control loop tertutup dapat dilihat
pada gambar 2.
Gambar 2. Sistem control loop tertutup

Sistem Kontrol PLC
Definisi Programmable Logic Controller (PLC) menurut National Electrical
Manufactures Association (NEMA) adalah suatu alat elektronika digital yang
menggunakan memori yang dapat diprogram untuk menyimpan instruksi- instruksi dari
suatu fungsi tertentu seperti logika, sekuensial, pewaktu dan aritmatika untuk
mengendalikan suatu proses [7]. Dengan pengertian lain PLC adalah suatu alat kendali
elektronika yang dapat diprogram dengan menggunakan fungsi logika.
Bagian utama PLC yaitu Central Processing Unit (CPU), Memory dan Modul
input/output serta port komunikasi untuk keperluan pemrograman yang dapat dilakukan
dengan menggunakan alat (programming unit). Pada beberapa jenis PLC untuk keperluan
pemrograman juga disediakan keypad dan screen. Selain itu untuk keperluan operasinya
PLC juga memiliki sumber catu daya (power supply unit - PSU) yang akan mengubah
tegangan AC menjadi tegangan yang sesuai dengan yang dibutuhkan oleh komponen
PLC. Skema PLC diperlihatkan pada gambar 3.
Gambar 3. Skema PLC
Kontrol PID
PID controller (Proportional–Integral–Derivative Controller) merupakan
kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik
adanya umpan balik pada sistem tesebut [6]. Komponen kontrol PID ini terdiri dari tiga
jenis yaitu Proportional, Integratif dan Derivatif. Ketiganya dapat dipakai bersamaan
maupun sendiri-sendiri tergantung dari respon yang kita inginkan terhadap suatu plant.
Kontrol Proporsional

Kontrol proporsional berfungsi untuk memperkuat sinyal kesalahan penggerak
(sinyal error), sehingga akan mempercepat keluaran sistem mencapai titik referensi.
Hubungan antara input kontroler u(t) dengan sinyal error e(t) terlihat pada persamaan 1.
u(t) = Kp. e(t) 1
Dengan Kp adalah konstanta proporsional. Diagram blok kontrol proporsional
ditunjukkan pada gambar 4.
Gambar 4. diagram blok kontrol proporsional
Kontrol Integral
Kontrol integral pada prinsipnya bertujuan untuk menghilangkan kesalahan
keadaan tunak (offset) yang biasanya dihasilkan oleh kontrol proporsional. Hubungan
antara output kontrol integral u(t) dengan sinyal error e(t) terlihat pada persamaan 2.
0
( ) ( )t
iu t K e d2
Ki adalah konstanta integral. Diagram blok kontrol integral ditunjukkan pada gambar 5.
Gambar 5. diagram blok kontrol integral
Kontrol Derivatif (Turunan)
Kontrol derivatif dapat disebut pengendali laju, karena output kontroler sebanding
dengan laju perubahan sinyal error. Hubungan antara output kontrol derivatif u(t) dengan
sinyal error e(t) terlihat pada persamaan 3.

( )( ) d
de tu t K
dt
3
Dengan Kd adalah konstanta derivative.
Kontrol derivatif tidak akan pernah digunakan sendirian, karena kontroler ini
hanya akan aktif pada periode peralihan. Pada periode peralihan, kontrol derivatif
menyebabkan adanya redaman pada sistem sehingga lebih memperkecil lonjakan. Seperti
pada kontrol proporsional, kontrol derivatif juga tidak dapat menghilangkan offset. Blok
kontrol derivatif ditunjukkan pada Gambar 6.
Gambar 6. diagram blok kontrol derivatif
Kontrol PID
Gabungan dari ketiga kontroler tersebut menjadi kontrol PID. Diagram Blok dari
kontrol PID ditunjukan pada gambar 7.
Gambar 7. diagram blok kontrol PID
Sehingga persamaan untuk kontrol PID adalah:
t
p i d
0
de(t)u(t) = K e(t) + K e(
dt
4
atau
t
p d
i 0
1 de(t)u(t) = K e(t) + e(
T dt
5
dengan:
u(t) = sinyal output pengendali PID
Kp = konstanta proporsional
Ti = waktu integral
Td = waktu derivatif
Ki
Kd = konstanta derivatif (Kp.Td )
e(t) = sinyal error = referensi – keluaran plant = set point – nilai sensor
Untuk persamaan PID no. (4) merupakan PID bentuk independent dan persamaan
no. (5) merupakan PID bentuk dependent. Istilah tersebut mengacu kepada
ketergantungan setiap suku persamaan terhadap nilai Kp. Untuk persamaan no (4), jika
kita melakukan perubahan nilai pada konstanta proporsional (Kp) maka tidak akan
mempengaruhi konstanta parameter lainnya. Sedangkan untuk persamaan no. (5), dengan
merubah nilai Kp maka akan merubah nilai dari parameter-parameter lainnya. Jika ingin
menggunakan persamaan dependent, maka tinggal memasukan nilai dari Ki = Kp/Ti dan
Kd = Kp.Td.
3. DIAGRAM ALIR PENELITIAN
Tahapan desain sistem kendali dalam penelitian ini meliputi deskripsi masalah,
penentuan input output, desain, analisa dan kesimpulan. Skema tahapan penelitian
ditunjukkan pada diagram alir seperti yang dapat dilihat pada gambar 8.
Gambar 8. Diagram alir penelitian

Penjelasan dari tahapan pada diagram alir diatas adalah sebagai berikut :
Tahapan deskripsi masalah merupakan tahapan untuk mengetahui skema sistem tahap
II dan cara kerjanya.
Tahapan penentuan input dan output merupakan tahapan untuk menentukan parameter
fisis yang ingin diketahui dan aksi yang akan dilakukan berdasarkan masukan pada
pengontrol.
Tahapan desain merupakan langkah untuk merancang sistem control berdasarkan
input dan output yang telah ditentukan.
Tahapan analisa merupakan tahapan untuk melakukan kajian terhadap sistem control
yang telah dibuat. Bila terdapat kelemahan dalam desain yang dibuat maka dapat
dilakukan perbaikan.
Tahapan kesimpulan merupakan langkah untuk mengambil hasil pemikiran dari
analisa sistem control.
3.1.Deskripsi Masalah
Dalam kegiatan penelitian tahap II Riset Kompetitif LIPI 2013, dilakukan
pengembangan sistem AOP yang telah berhasil dibuat pada tahap I tahun 2012. Sebagai
perbandingan skema desain perangkat keras sistem AOP tahap I tahun 2012 dan tahap II
tahun 2013 dapat dilihat pada gambar 9. Sistem AOP tahap II mengalami beberapa
perubahan dibandingkan sistem AOP tahap I yaitu :
a. Sistem Osmosa Balik (RO)
Penggunaan sistem osmosa balik bertujuan untuk mengurangi padatan yang terlarut
dalam air. Sistem osmosa balik diletakkan setelah proses filtrasi karbon aktif.
b. Sistem Kendali PLC (Programmable Logic Controller)
Sistem kendali dibutuhkan pada sistem AOP agar operasional alat menjadi lebih
mudah dan terkendali. Dalam sistem kendali tersebut terdapat Human Machine
Interface (HMI) sebagai penghubung operator dan sistem dimana data proses
pengolahan dapat ditampilkan dan disimpan untuk keperluan analisis dan pelaporan
[8]. Disamping itu dengan adanya sistem pengendalian maka dapat dilakukan
diagnose sistem dan pengaturan parameter.
c. Electronic Control Valve (ECV)
Valve ini berfungsi untuk mengendalikan aliran fluida berdasarkan masukan dari
parameter yang diukur. Ada dua ECV yang digunakan dalam desain pengembangan

sistem AOPRO yaitu pertama untuk mengendalikan aliran air gambut yang masuk ke
tangki ozonasi dan kedua untuk mengenalikan aliran cairan tawas untuk
mengendalikan kadar pH.
d. Tangki Sedimen
Untuk menampung air hasil olahan setelah melalui proses oksidasi dalam tangki
ozonasi.
e. Static mixer
Komponen ini berguna untuk meningkatkan homogenisasi kelarutan ozon dalam air
sehingga proses oksidasi unsur-unsur dalam air gambut dapat terjadi lebih sempurna.
f. Reservoir 1 dan 2
Komponen sistem AOPRO yang berguna untuk menampung air hasil olahan.
g. Tangki Tawas
Tangki yang berfungsi untuk tempat penyimpanan cairan tawas yang digunakan untuk
menaikkan pH air.
Perbandingan spesifikasi peralatan instrumentasi yang digunakan dalam pada
skema sistem AOPRO tahap 1 dan 2 ditampilkan pada tabel 1.
Tabel 1. Perbandingan spesifikasi sistem AOP tahap 1 dan 2
Peralatan Tahap 1 Tahap 2
Unit AOP 100 ltr/jam. 100 ltr/jam.
Unit filter CA 1 ltr 1 ltr
Unit PLC - CJ2M-CPU31
Ozone generator maks 10 gr/hr maks 10 gr/hr
Oxygen (tabung) 7 m3 7 m3
Cairan kimia H2O2 Konsentrasi 50% dari 1 liter -
Pada tahap 1 digunakan cairan kimia H2O2 dengan konsentrasi 50% dari 1 liter. Namun
pada tahap 2 tidak digunakan cairan kimia H2O2 dengan pertimbangan beberapa hal yaitu
mengurangi penggunaan bahan kimia, meningkatkan keselamatan operasi, kemudahan
operasional, harganya relatif mahal dan sulit diperoleh di pasaran.

(a)
(b)
Gambar 9. Skema sistem instalasi AOPRO (a) skema sistem tahap I [3] (b) desain pengembangan sistem (tahap II)
Cara kerja alat ini adalah sebagai berikut : mula-mula ozon generator dinyalakan
dan air gambut dipompa ke dalam tangki ozonasi. Gas ozon bercampur dengan air
gambut melalui injector ozon. Campuran air gambut dan ozon dialirkan melalui static
mixer agar homogenitas campuran meningkat[9]. Ozon dan air gambut yang telah
bercampur kemudian mengalir ke tangki ozonasi yang dilengkapi dengan lampu UV.
Dengan bantuan penyinaran lampu UV, ozon dan air akan terurai menjadi radikal OH

yang akan menguraikan senyawa polutan dengan reaksi oksidasi. Air olahan bisa
disirkulasikan ke dalam tangki ozonasi untuk dioksidasi kembali sehingga proses oksidasi
semakin sempurna dan kualitas air olahan meningkat.
Setelah mengalami oksidasi maka air olahan mengalir ke tangki sedimentasi untuk
mengendapkan gumpalan dan kotoran yang terjadi. Air olahan dari tangki sedimentasi
bisa disirkulasikan kembali ke tangki ozonasi untuk meningkatkan kualitas air olahan. Air
dari tangki sedmentasi mengalir ke reservoir 1.
Setelah dari reservoir 1 air mengalir ke filter karbon aktif. Disini terjadi
penyaringan terhadap partikel berukuran besar. Disamping itu juga filter dengan karbon
aktif untuk menghilangkan bau, rasa dan warna air olahan sehingga menjadi air bersih[10].
Air hasil filtrasi karbon aktif kemudian dialirkan ke reservoir 2. Pada air
ditambahkan tawas untuk menaikkan pH air. Seperti dijelaskan sebelumnya bahwa air
gambut memiliki pH dibawah 7.
Setelah mengalami filtrasi dengan karbon aktif dan penambahan tawas, air olahan
disaring dengan sistem osmosa balik. Penyaringan ini bertujuan untuk menghilangkan
partikel berukuran kecil yang masih terdapat dalam air. Air yang dihasilkan merupakan
air yang bersih untuk digunakan sehari-hari. Permasalahan dalam penelitian ini adalah
bagaimana membuat sistem kontrol sehingga proses diatas dapat berjalan secara otomatis
sehingga pengoperasian alat menjadi lebih mudah dan terkontrol. Dalam sistem control
tersebut juga dapat ditampilkan hasil pengukuran, penyimpanan data, diagnose sistem,
dan seting parameter.
4. PENENTUAN INPUT DAN OUTPUT
Dalam penelitian ini pengontrol yang digunakan adalah Programmable Logic
Controller (PLC) dengan pertimbangan PLC memiliki fleksibilitas dalam pemrograman
dan kemudahan dalam instalasi[7]. Selain itu PLC juga banyak tersedia di pasaran dan
mudah dalam implementasi di lapangan.
Ada beberapa hal yang menjadi parameter dalam pengukuran ini yaitu debit aliran
oksigen, debit aliran air, tinggi permukaan cairan, pH, konduktivitas, dan turbiditas.
Untuk itu diperlukan sensor yang sesuai untuk dapat melakukan pengukuran parameter
tersebut. Pemilihan sensor didasarkan pada kemudahan dalam penggunaan, durabilitasnya
dalam penggunaan di lapangan dan harganya yang ekonomis.

Tombol dan saklar merupakan input manual yang dilakukan operator dan cairan
untuk menjalankan suatu sistem. Ada dua macam tombol yang digunakan yaitu tombol
Auto dan Manual. Sedangkan saklar digunakan untuk mendeteksi ketinggian cairan dalam
tangki yang akan menggerakkan pompa bila mencapai ketinggian tertentu.
Proses pengendalian dilakukan setelah menerima input berupa hasil pengukuran,
tombol atau saklar. Hal ini dilakukan dengan cara mengendalikan ozon, katup, pompa,
lampu UV dan sistem osmosa balik.
Tabel 2. Sensor sistem control PLC pada sistem pengolah air gambut
No
Jenis sensor Fungsi Posisi Penempatan
1 pH Mengukur pH air Tangki tawas
2 Flow Mengukur debit aliran Setelah RO
3 Level Mengukur tinggi air Tangki ozonasi dan sedimen
4 Konduktivitas Mengukur konduktivitas
air
Tangki tawas
5 Turbiditas Mengukur kekeruhan air Tangki tawas
6 Saklar Mengaktifkan pompa Tangki ozonasi dan sedimen
7 Tombol Menjalankan mesin
manual atau otomatis
Panel utama dan HMI
Tabel 3. Aktuator sistem control PLC pada sistem pengolah air gambut
No Jenis Aktuator Fungsi Posisi Penempatan
1 Ozon generator Menghasilkan ozon Sebelum tangki ozonasi
2 ECV Membuka atau menutup
aliran
Setelah pompa air gambut dan
tabung tawas
3 Pompa Mengalirkan air Setelah tangki dan reservoir
4 UV Menguraikan ozon Tangki ozonasi
5 RO Menyaring air Setelah filtrasi karbon aktif
Untuk menggunakan PLC sebagai pengontrol sistem pengolah air gambut, maka perlu
ditentukan komponen input dan output bagi PLC. Komponen input adalah komponen
yang akan memberikan masukan kepada PLC. Biasanya berupa sensor, tombol atau
saklar. Sedangkan komponen output merupakan komponen yang akan menerima perintah

dari pengontrol untuk melakukan suatu tindakan tertentu akibat masukan dari komponen
input (biasanya berupa pompa, lampu atau katup). Komponen input dan output sistem
control PLC pada sistem pengolah air gambut ditunjukkan pada tabel 2 dan 3[11].
5. DESAIN SISTEM KONTROL PLC
5.1.Perangkat Keras
Sistem control pada sistem pengolah air gambut dirancang berdasarkan skema
PLC. Pada bagian input dan output PLC dipasang sensor dan actuator seperti yang
ditampilkan pada tabel 1 dan 2. Skema sistem kendali yang dirancang diperlihatkan pada
gambar 11 [7,8.11-13].
Input Interface
ProsesorOutput
Interface
Power Supply
Program & Data Memory
Communication Interface
Fast Ethernet
LaptopServer
Ozon Generator
UV
Pompa
RO
ECV
pH
Level
Flow
Konduktivitas
Switch
Button
Turbiditas
PC
HMI
Gambar 10. Skema sistem kendali dengan PLC pada sistem pengolah air gambut
Spesifikasi perangkat keras PLC yang dibutuhkan untuk sistem AOP tahap 2 adalah
sebagai berikut [12-13]:
Control Processing Unit tipe CJ1M-CPU11-ETNUC, 160 E/S max., 100 Base-TX.
Port Ethernet + Port RS-232C
Power Supply tipe CJ1W-PA202 100~240 Vac, 50/60 Hz, 50 VA
Digital Input tipe CJ1W-ID211/16 point, 24 Vdc / 7 mA
Digital Ouput tipe CJ1W-OD211/16 point, 24 Vdc / 500 mA
Analog Input dan Analog Ouput tipe CJ1W-DA041/4 Chann., 4~20 mA / 1 ~ 5 Vdc
PLC terdiri dari modul PSU (Power Supply Unit), modul CPU (Central
Processing Unit), modul input/output digital dan modul input/output analog. Digital-input

berfungsi untuk mendeteksi status kontak-saklar dan digital-ouput digunakan untuk
komando On/Off motor pompa, unit generator oksigen, unit RO. Input-analog berfungsi
untuk mendeteksi sinyal dari Flow Transmitter (FT), Level Transmitter (LT), pH,
turbidity, dan conductivity. Output analog berfungsi untuk menggerakan Electric Control
Valve (ECV) secara proporsional. Disamping pemroses sinyal digital dan analog, PLC
juga dapat melakukan konversi sinyal-analog ke engineering unit, pengendalian variabel
dengan metoda PID (Proportional, Integral, Derivative) dan TPO (Time Proportional
Output).
Komputer HMI (Human Machine Interface) digunakan untuk mengoperasikan
sistem proses, terdiri dari program interaktif animasi proses, setup parameter, diagnosa
sistem proses, dan trending/loging. Komputer notebook sebagai EWS (Engineer Work
Station) berfungsi sebagai pengembangan program PLC dan diagnostik program [12,13].
Pengontrol yang digunakan dalam penelitian ini adalah pengontrol jenis PID yang
mampu memberikan respon yang baik terhadap perubahan yang terjadi dalam proses
pengolahan air gambut. Pengontrol jenis ini cocok untuk digunakan dalam proses yang
menghendaki respon yang presisi. Setiap kekurangan dan kelebihan dari masing-masing
kontroler P, I dan D dapat saling menutupi dengan menggabungkan ketiganya secara
paralel menjadi kontroler proposional plus integral plus diferensial (kontroller PID).
Elemen-elemen kontroller P, I dan D masing-masing secara keseluruhan bertujuan untuk
mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan
awal yang besar[6]. Karakteristik kontroler PID sangat dipengaruhi oleh kontribusi besar
dari ketiga parameter P, I dan D. Penyetelan konstanta Kp, Ti, dan Td akan
mengakibatkan penonjolan sifat dari masing-masing elemen. Satu atau dua dari ketiga
konstanta tersebut dapat disetel lebih menonjol dibanding yang lain. Konstanta yang
menonjol itulah akan memberikan kontribusi pengaruh pada respon sistem secara
keseluruhan. Pembahasan lebih lanjut mengenai pengontrol PID yang digunakan dalam
penelitian ini akan dijelaskan pada makalah tersendiri.
5.2.Perangkat Lunak
Setelah dilakukan desain perangkat keras PLC maka langkah selanjutnya adalah
membuat program sesuai dengan cara kerja dan skema PLC seperti ditunjukkan pada
gambar 10. Pembuatan program PLC dilakukan menggunakan komputer notebook
sebagai EWS (Engineer Work Station). Diagram alir program PLC untuk pengolahan air
gambut ditunjukkan pada gambar 11.

Gambar 11. Diagram alir perangkat lunak PLC sistem pengolah air gambut
Untuk HMI digunakan perangkat lunak King View versi 6.3 meliputi display
animasi proses, trend monitor, pelaporan, diagnostik sistem dan seting parameter.
Diagram alir HMI sistem pengolah air gambut diperlihatkan pada gambar 12.
DisplayMain menu
No
No
Yes
Yes
No
No
No
Yes
Yes
Yes
YesTerminated
Proses AOP +RO
?
TrendMonitor
?
Pelaporan?
DiagnostkSystem
?
PengaturanParameter
?
Keluar?
Display menuProses AOP +RO
1
2
3
4
5
RUN
Display menuPelaporan
3
Yes
Yes
No
No
Return
Return
Level graphname
pH graphname
Levelgraphsave ?
Save level graph
pHgraphsave ?
No
Return
Save pH graph
Levelgraphopen ?
Level graphname
Open level graph
DisplayLevel graph
No
pHgraphopen ?
Return
pH graphname
Open pH graph
DisplaypH graph
Yes
Yes
Display menuTrend Monitor
2
Level SV Set
?
pH SV Set
?
Set Level SV
Set pH SV
Yes
Yes
No
No
Return
Return
Return
Display menuDiagnostik Sistem
4
ANIMATIONDigital Input/Output.Analog Input/Output.PID Controller, TPO.
Return
Display menuPengaturan Parameter
5
PID Parameter
Set ?
PID,TPO Parameter
Set ?
Set parameter PID
Yes
Yes
No
No
Return
Set parm.PID & TPO
Return
No
Return
Gambar 12. Diagram alir perangkat lunak HMI sistem pengolah air gambut

6. HASIL PERCOBAAN DAN ANALISA
Hasil rancangan program pemantauan dan pengendalian yang dibuat perlu diuji
secara simulasi untuk mengetahui apakah rancangan program dapat berjalan dengan baik
sesuai dengan rancangan sekuen proses serta mendapatkan gambaran mengenai
permasalahan dari sistem yang dibuat sehingga dengan demikian dapat dilakukan
perbaikan maupun perubahan.
Tabel 4. Data uji coba aktivitas sinyal input diskrit
No Alamat Input Nama Divais Tag Name Status Input Hasil
1 0.00 Start Mode SM On/Off Ok
2 0.01 Auto / Manual Mode S-AM On/Off Ok
3 0.02 Limit Switch 1 LS1 On/Off Ok
4 0.03 Limit Switch 2 LS2 On/Off Ok
5 0.04 Limit Switch 3 LS3 On/Off Ok
Pengujian sistem kendali dilakukan dengan sistem simulasi yang sudah terpasang dan
terinstalasi dengan melakukan uji unit elektrikal dengan mengacu pada metodologi
elektrikal yang sudah direncanakan yaitu pengujian unit elektrikal pada sistem riil
dengan perangkat keras Programmable Logic Controller (PLC) seperti diperlihatkan
pada gambar 10. Uji coba verikasi fungsi program untuk signal input/output diskrit yang
hasilnya dibaca melalui memori PLC dan HMI. Data uji coba aktivitas sinyal input dan
output PLC dapat dilihat pada tabel 4 dan 5.
Tabel 5. Data uji coba output diskrit penggerak
No Alamat
Input
Nama Divais Tag Name Status Input Hasil
1 1.00 Inlet pump PM1 On/Off Ok
2 1.01 Oxygen generator OXI GEN On/Off Ok
3 1.02 Ozone generator OZO GEN On/Off Ok
4 1.03 UV UV LAMP On/Off Ok
5 1.04 Circulation pump PM2 On/Off Ok
6 1.05 Transfer pump PM3 On/Off Ok
7 1.06 Dosing Valve DS_P On/Off Ok
8 1.07 Feeder pump PM4 On/Off Ok
9 1.08 Reverse Osmosis RO On/Off Ok
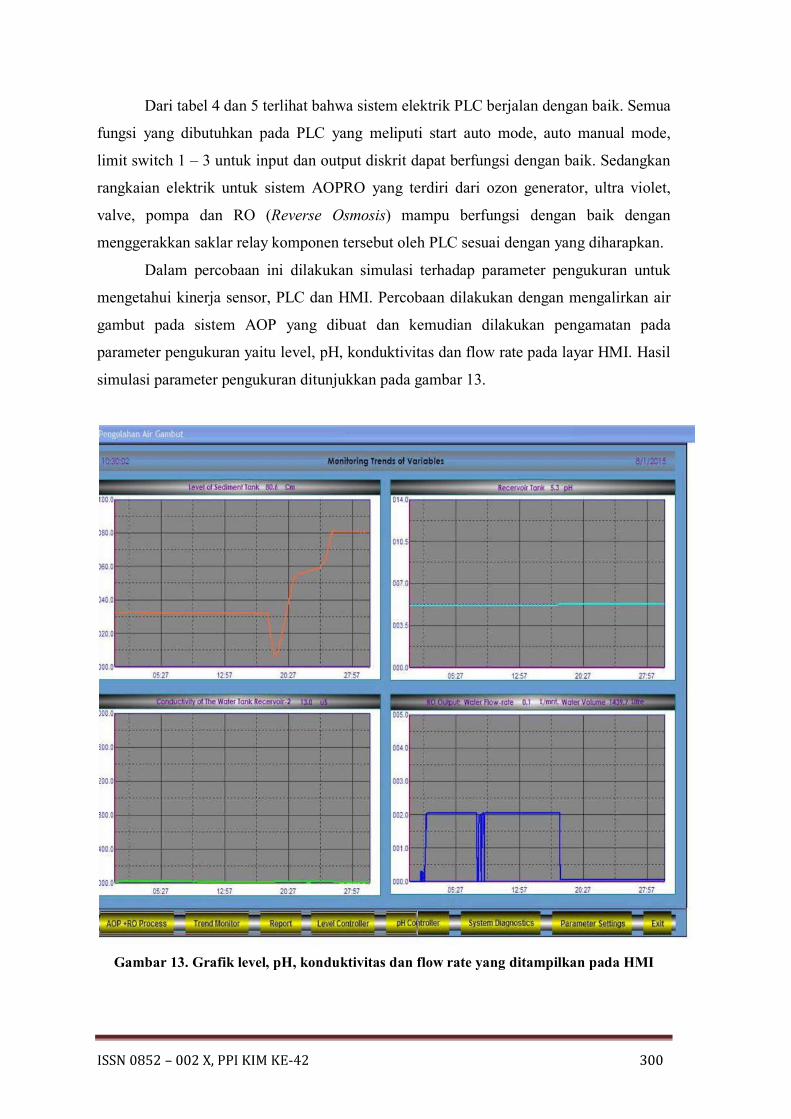
Dari tabel 4 dan 5 terlihat bahwa sistem elektrik PLC berjalan dengan baik. Semua
fungsi yang dibutuhkan pada PLC yang meliputi start auto mode, auto manual mode,
limit switch 1 – 3 untuk input dan output diskrit dapat berfungsi dengan baik. Sedangkan
rangkaian elektrik untuk sistem AOPRO yang terdiri dari ozon generator, ultra violet,
valve, pompa dan RO (Reverse Osmosis) mampu berfungsi dengan baik dengan
menggerakkan saklar relay komponen tersebut oleh PLC sesuai dengan yang diharapkan.
Dalam percobaan ini dilakukan simulasi terhadap parameter pengukuran untuk
mengetahui kinerja sensor, PLC dan HMI. Percobaan dilakukan dengan mengalirkan air
gambut pada sistem AOP yang dibuat dan kemudian dilakukan pengamatan pada
parameter pengukuran yaitu level, pH, konduktivitas dan flow rate pada layar HMI. Hasil
simulasi parameter pengukuran ditunjukkan pada gambar 13.
Gambar 13. Grafik level, pH, konduktivitas dan flow rate yang ditampilkan pada HMI

Hasil pengukuran fisis air gambut yang meliputi level, pH, konduktivitas dan flow
rate mampu ditampilkan dengan baik pada layar HMI. Setiap perubahan fisis pada sistem
AOP dapat ditampilkan pada layar HMI. Hal ini menunjukkan bahwa sensor, PLC dan
HMI mampu bekerja dengan baik sesuai yang diharapkan.
7. KESIMPULAN
Dalam tulisan ini telah dipaparkan pengembangan desain sistem AOPRO tahap I
untuk pengolahan air gambut. Pengembangan sistem AOPRO tahap II merupakan
penyempurnaan sistem AOPRO tahap I yang dioperasikan secara manual. Desain sistem
AOPRO tahap II memiliki beberapa tujuan yaitu untuk meningkatkan kuantitas dan
kualitas air hasil olahan, akurasi, keselamatan, dan kemudahan operasi. Pengembangan
dilakukan dengan penambahan PLC, ECV, rotameter, sistem RO, karbon aktif, tangki
tawas, static mixer, reservoir dan beberapa sensor fisis seperti konduktivitas, pH, level
cairan, flow dan turbiditas. Penambahan komponen-komponen tersebut didasarkan pada
kebutuhan dan desain sistem AOPRO tahap II. Desain sistem AOPRO tahap II tersebut
kami anggap sudah sesuai dengan sistem kontrol yang diinginkan. System AOPRO yang
kami rancang bersifat fleksibel artinya dapat disesuaikan dengan kebutuhan di masa yang
akan datang.
8. UCAPAN TERIMA KASIH
Terima kasih kepada Lembaga Ilmu pengetahuan Indonesia (LIPI) yang telah
memberi kesempatan untuk melakukan penelitian kompetitif LIPI periode 2012 s.d 2014.
Terima kasih juga kami sampaikan kepada Pemda Kabupaten Kampar Propinsi Riau atas
kerjasamanya dalam menyediakan lokasi dan sampel penelitian.
9. DAFTAR PUSTAKA
[1] PERMENKES No 492/MENKES/PER/IV/2010 : Persyaratan Kualitas Air Minum,
2010.
[2] D Anwar Musadad. Pengaruh Air Gambut Terhadap Kesehatan dan Upaya
Pemecahannya. Media Litbangkes. Vol VIII No 01.1998.
[3] Sutrisno Salomo Hutagalung, Anto Tri Sugiarto, dan Veny Luvita. Pengolahan Air
Gambut Menjadi Air Bersih Dengan Metode AOP di Kabupaten Kampar Provinsi

Riau. Prosiding Seminar Nasional Kimia UGM. Vol 1. No 1. Hal 73 – 80.
Yogyakarta. 2013.
[4] Roberto Andreozzi, Vincenzo Caprio, Amedeo Insola, Raffaele Marotta. Advanced
Oxidation Processes (AOP) for Water Purification and Recovery. Catalysis Today
53. 1999. pp 51–59.
[5] Lilian Malaeb, George M. Ayoub. Reverse Osmosis Technology for Water
Treatment: State of The Art Review. Desalination. Volume 267. Issue 1. Pages 1-8.
Amsterdam. 1 February 2011.
[6] Ogata, K. Modern Control Engineering. New York. Prentice Hall. 2010.
[7] W. Bolton. Programmable Logic Controllers (Fourth Edition). Newnes. Oxford.
2006.
[8] Peng Zhang. Human–Machine Interfaces. Advanced Industrial Control Technology,
2010, Pages 527-555.
[9] F. Theron, N. Le Sauze. Comparison between three static mixers for emulsification
in turbulent flow.International Journal of Multiphase Flow 37 (2011) 488–
500.Elsevier.
[10] Mengolah Air Kotor Untuk Air Minum. Penebar Swadaya. Jakarta. 2010.
[11] Alan S. Morris, Reza Langar. Measurement and Instrumentation: Theory and
Application. Elsevier. California. 2012.
[12] Technical Manual, “SYSMAC CJ-Series Analog I/O unit”, OMRON Co.,
Japan, 2009.
[13] Technical Manual, “SYSMAC CJ-Series Discrete I/O Unit ”, OMRON Co.,
Japan, 2009.
HASIL DISKUSI
Penanya : Helmi Zaini (P2 Metrologi – LIPI)
Pertanyaan : Apa pengaruh penambahan ozone generator ?
Jawaban : Penambahan ozone generator berguna untuk meningkatkan kualitas air
olahan dan mempersingkat waktu pengolahan air.

Penanya : Agus Prihartono (P2 Metrologi – LIPI)
Pertanyaan : Bagaimana penambahan ozone generator meningkatkan kualitas air
olahan ?
Jawaban : Penambahan ozone generator akan meningkatkan jumlah ozone yang
dihasilkan sehingga akan dihasilkan lebih banyak gugus hidorksil (OH-)
dalam tangki ozonasi. Peningkatan kadar ozon akan meningkatkan
kemampuan sistem AOPRO dalam menguraikan unsur-unsur organik
dalam air gambut sehingga kualitas air olahan semakin meningkat.
Penanya : Asep Insani (P2 Metrologi – LIPI)
Pertanyaan : Mengapa digunakan ECV ?
Jawaban : Penggunaan ECV untuk mengatur aliran yang masuk agar dapat
dikendalikan secara elektronik.