
Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan … · Distributed Control System...
37
DISUSUN OLEH: Fatwa Cahyo Kusumo Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan Menggunakan Distributed Control System Centum CS 3000 Fatwa Cahyo Kusumo 2206.100.137 DOSEN PEMBIMBING: 1. Ir. Ali Fatoni, MT. 2. Imam Arifin. ST, MT TE091399 TE091399-Tugas Tugas Akhir Akhir
Transcript of Desain dan Realisasi Sistem Kontrol Proses Melalui Jaringan … · Distributed Control System...
D I S U S U N O L E H :
F a t w a C a h y o K u s u m o
Desain dan Realisasi Sistem Kontrol ProsesMelalui Jaringan Menggunakan Distributed
Control System Centum CS 3000
F a t w a C a h y o K u s u m o
2 2 0 6 . 1 0 0 . 1 3 7
DOSEN PEMBIMBING:
1. Ir. Ali Fatoni, MT.
2. Imam Arifin. ST, MT
TE091399TE091399--Tugas Tugas AkhirAkhir
Latar belakang
Terdapat jarak yang jauh antara kontroler dan plant
Penggunaan Distibuted Control System(DCS) di industri
Permasalahan
• Merancang sistem kontrol proses menggunakanDistributed Control System (DCS) Centum CS 3000 dan embeded system melalui jaringan
Tujuan
Mengintegrasikan DCS Centum CS 3000 dengan embeded system melalui jaringan untuk mengontrol plant dari jarak jauh
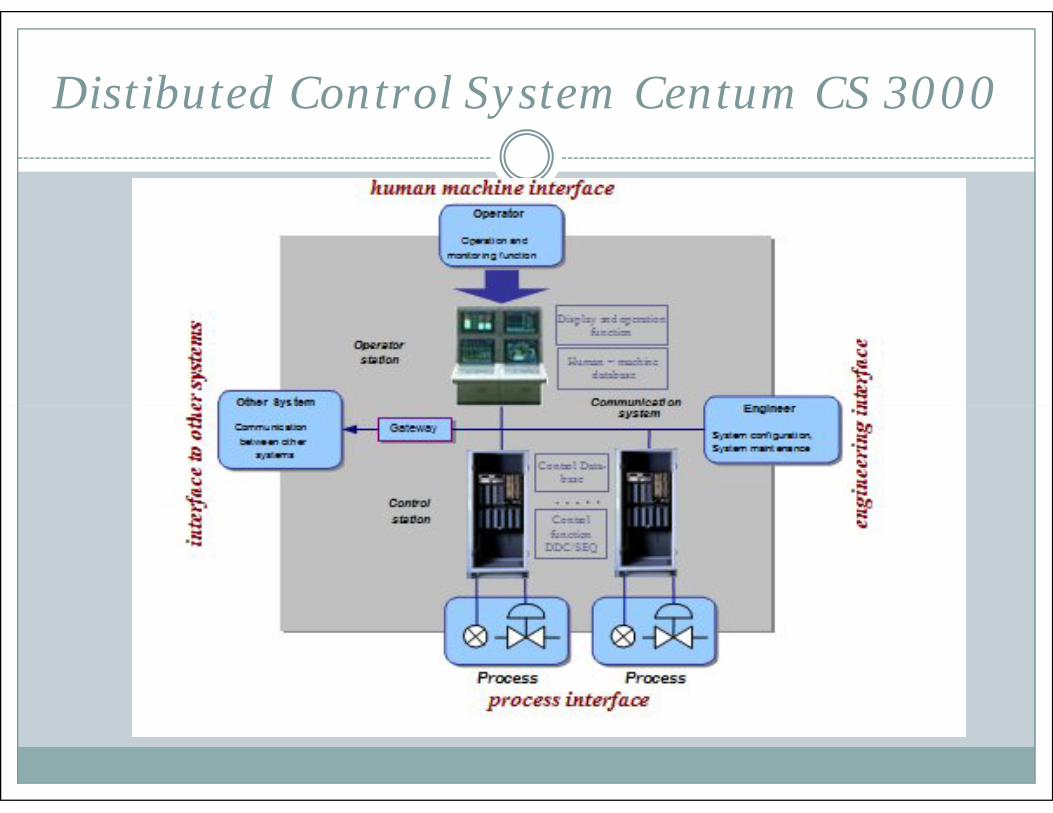
Distibuted Control System Centum CS 3000
Human Inteface Station (HIS)
Fungsi Pembuatan program kontroler
Pengontrol jalannya proses
Sebagai pengawas jalannya proses
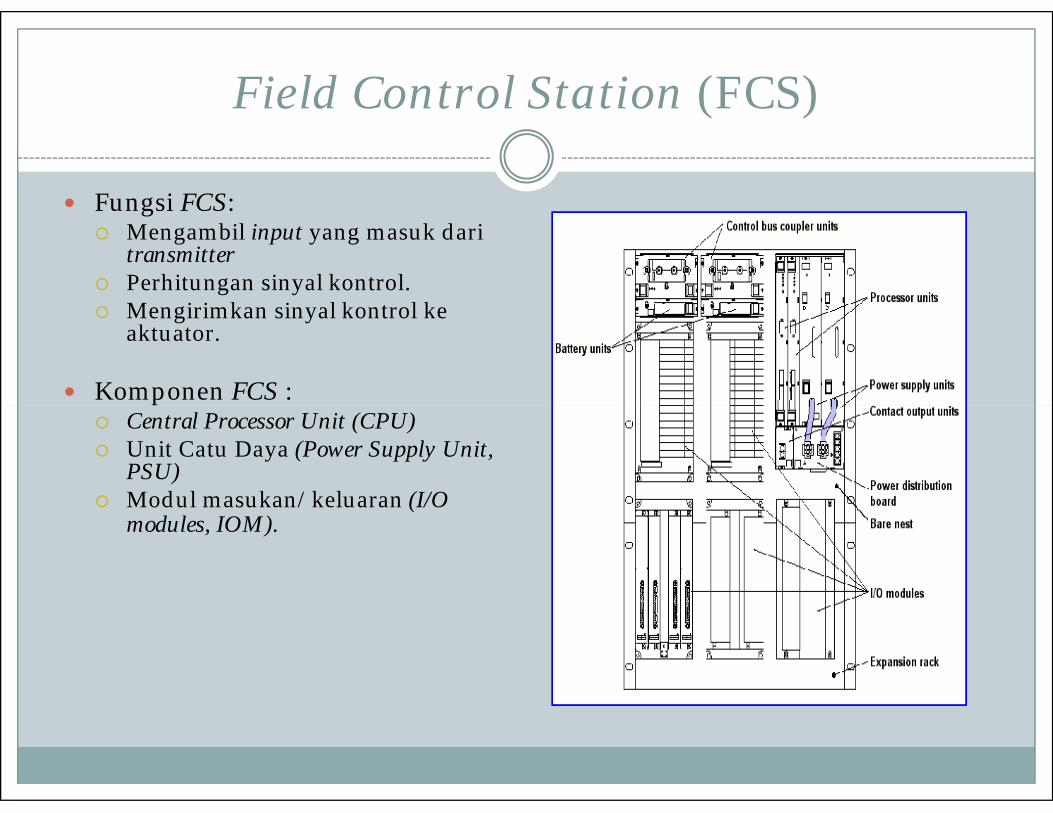
Field Control Station (FCS)
Fungsi FCS: Mengambil input yang masuk dari
transmitter Perhitungan sinyal kontrol. Mengirimkan sinyal kontrol ke
aktuator.
Komponen FCS :Komponen FCS : Central Processor Unit (CPU) Unit Catu Daya (Power Supply Unit,
PSU) Modul masukan/keluaran (I/O
modules, IOM).
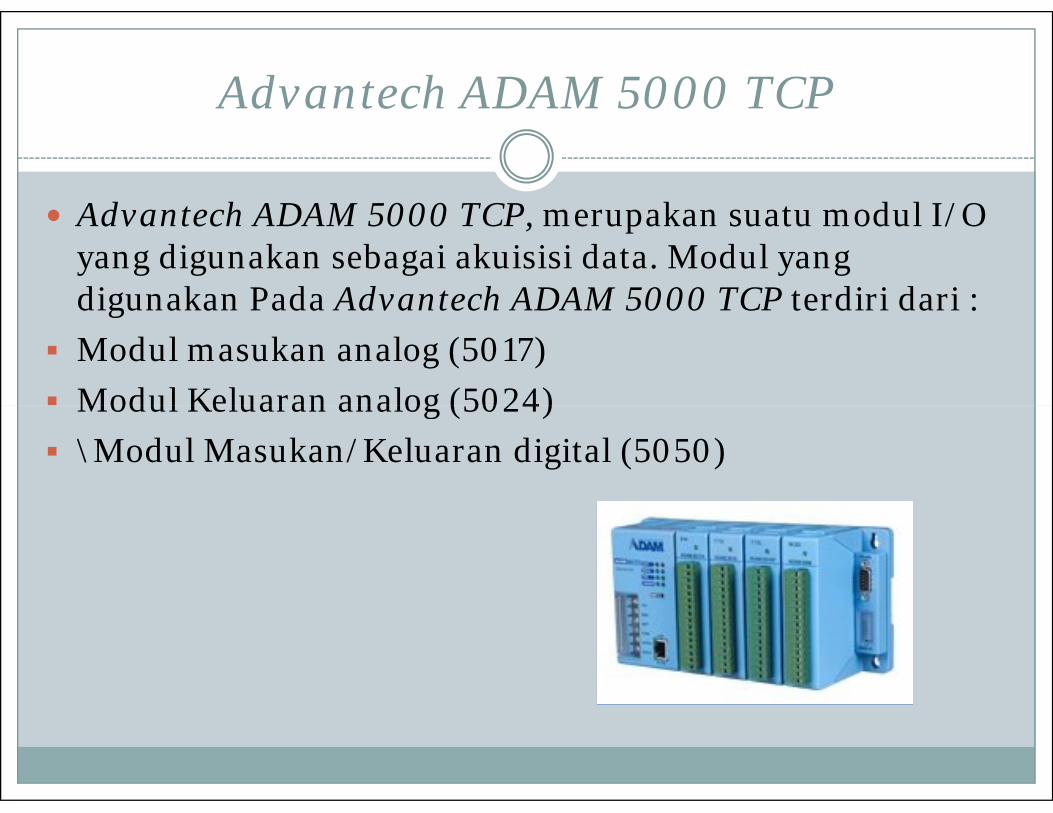
Advantech ADAM 5000 TCP
Advantech ADAM 5000 TCP, merupakan suatu modul I/O yang digunakan sebagai akuisisi data. Modul yang digunakan Pada Advantech ADAM 5000 TCP terdiri dari :
Modul masukan analog (5017)
Modul Keluaran analog (5024) Modul Keluaran analog (5024)
\Modul Masukan/Keluaran digital (5050)
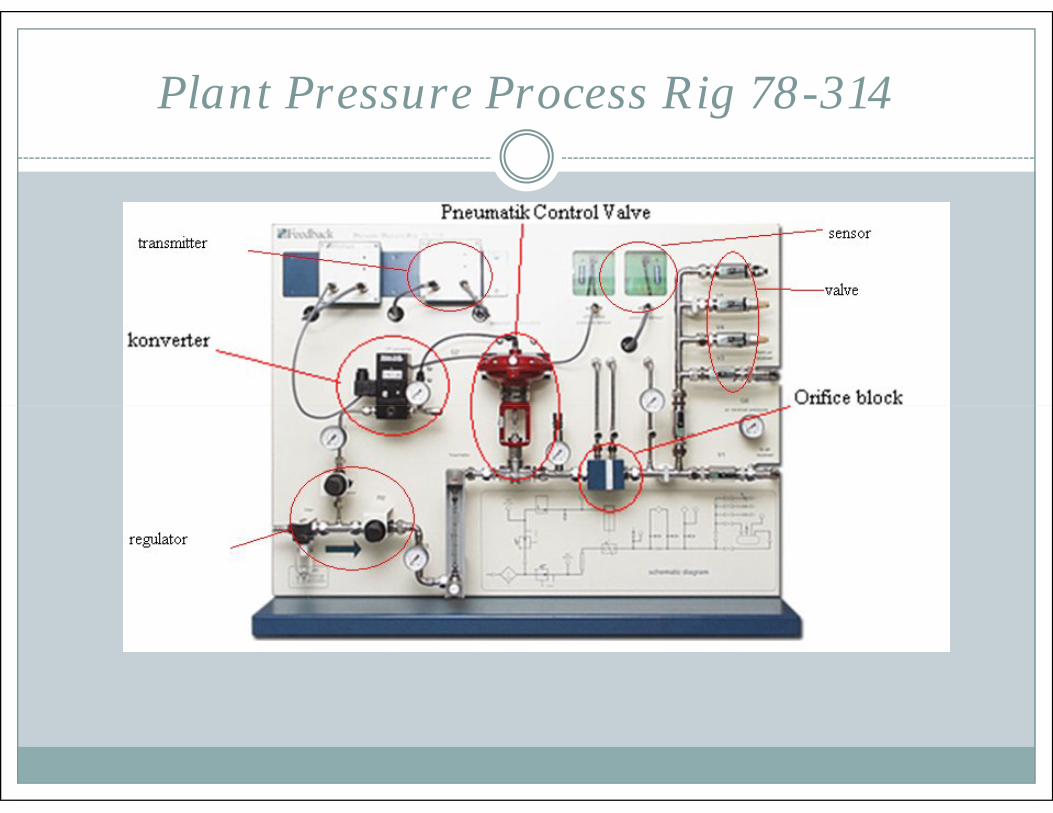
Plant Pressure Process Rig 78-314
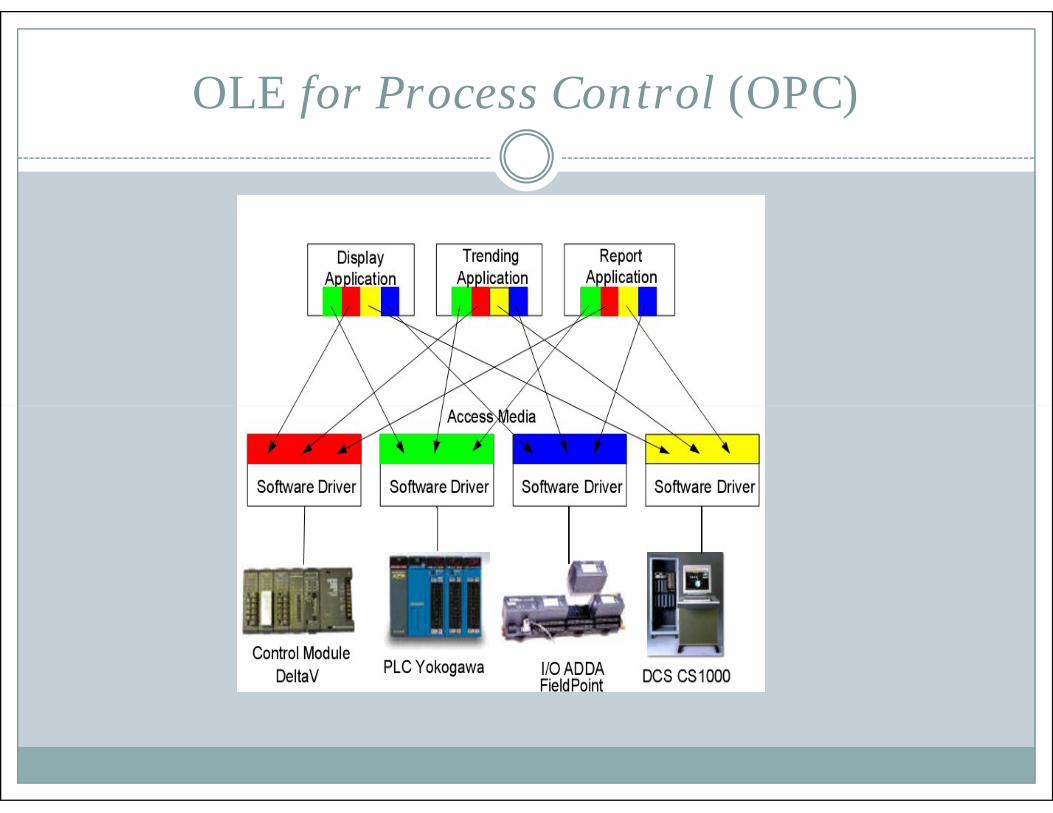
OLE for Process Control (OPC)
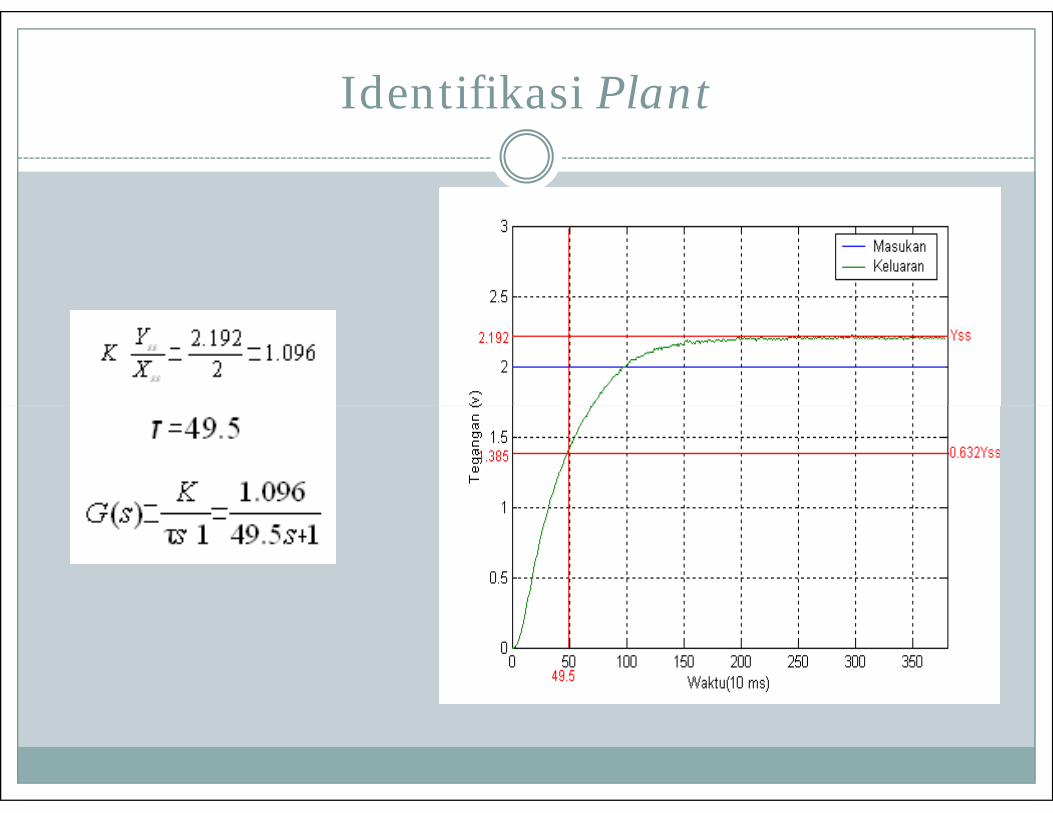
Identifikasi Plant
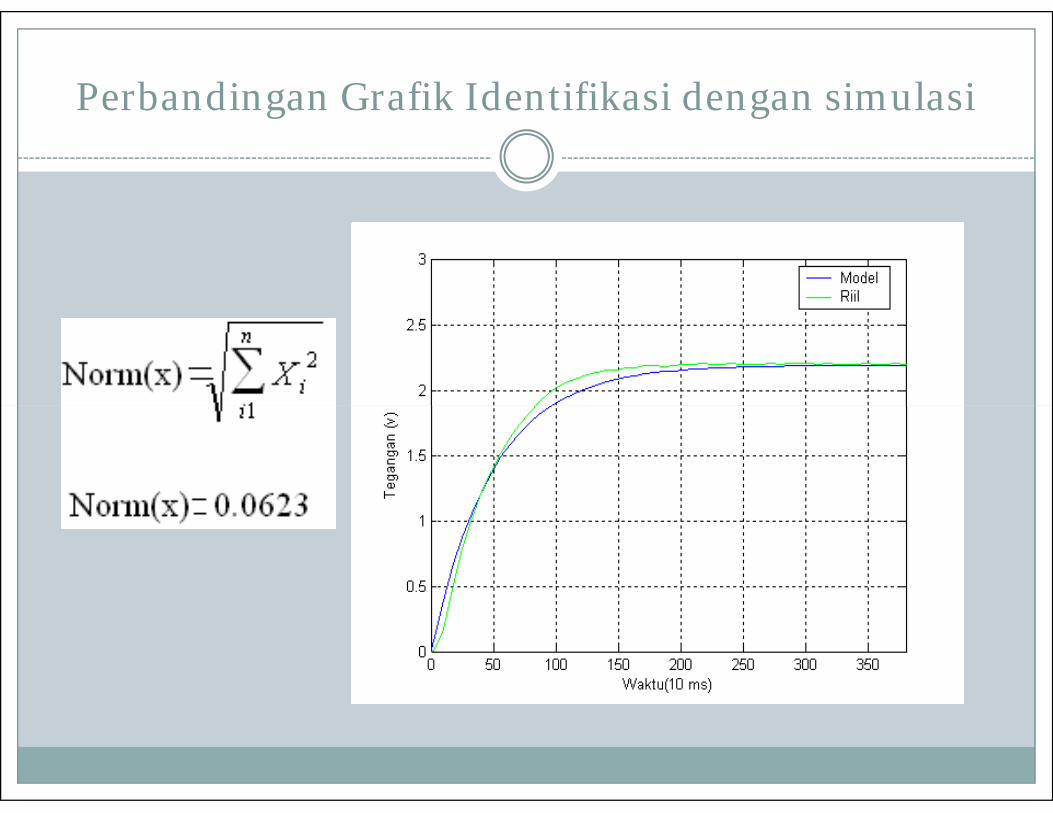
Perbandingan Grafik Identifikasi dengan simulasi

Arsitektur Simulator untuk Sistem Kontrol Proses
Definisi Kebutuhan
Perancangan sistem kontrol proses ini membutuhkan komponen-komponen seperti :
PC HIS
PC Labview PC Labview
NI PCI E6025 Series
Local Area Network(LAN)
ADAM 5000 TCP
Plant Pressure Process Rig
PC HIS
Komputer Human Interface Station merupakan komputer pusat yang memiliki fungsi sebagai kontroler Komputer Human Machine Interface merupakan bagian dari Distributed Control System Centum 3000.
spesifikasi :
Prosessor : Intel(R) Pentium (4) 4 CPU 3.00 GHz
Memori : 224Mb RAM
Operating system : Microsoft Windows XP Professional
Perangkat lunak : Centum CS 3000
PC Labview
Komputer Labview memiliki fungsi sebagai penghubung antara Centum CS 3000 dengan perangkat keras Advantech ADAM 5000 TCP (embeded system). Dari komputer ini, digunakan untuk pengiriman dan penerimaan data.
spesifikasi:
Prosessor : Intel(R) Core(TM) 2 duo CPU E7300 2.66 GHz
Memori : 988 Mb RAM
Operating system : Microsoft Windows XP Professional
Perangkat lunak : Labview 7.1
NI PCI E6025 Series
PCI E6025 ini digunakan sebagai akuisisi data. Datadari modul keluaran analog FCS akan dihubungkandengan modul masukan analog PCI dan modulmasukan analog PCI akan dihubungkan denganmodul keluaran analog FCS.modul keluaran analog FCS.
Local Area Network (LAN)
Penggunaan LAN pada perancangan sistem kontrol ini, sebagai penghubung antara PC Labview dengan perankat keras ADAM 5000 TCP
ADAM 5000 TCP
Perangkat keras ADAM 5000 TCP ini, digunakan sebagai I/O untuk menjalankan proses. Hal ini dikarenakan, perangkat keras ADAM 5000 TCP bekerja setelah diberikan masukan dari komputer Labview 7.1. Nilai yang dibaca pada perangkat keras Labview 7.1. Nilai yang dibaca pada perangkat keras ADAM 5000 TCP adalah nilai desimal. Untuk menjalankan alat ini, perintah dikirim melalui jaringan ethernet dengan komunikasi modbus.
Plant Pressure Process Rig 78-314
Plant pressure process rig 78-314 digunakan sebagai representasi dari suatu proses yang terjadi di industri

Koneksi DCS Centum CS 3000 dengan Labview
Komunikasi antara HIS
dengan FCS menggunakan
V-Net.
Koneksi antara FCS dengan
PC Labview menggunakanPC Labview menggunakan
kabel.
PCI yang digunakan
NI PCI E6025Series
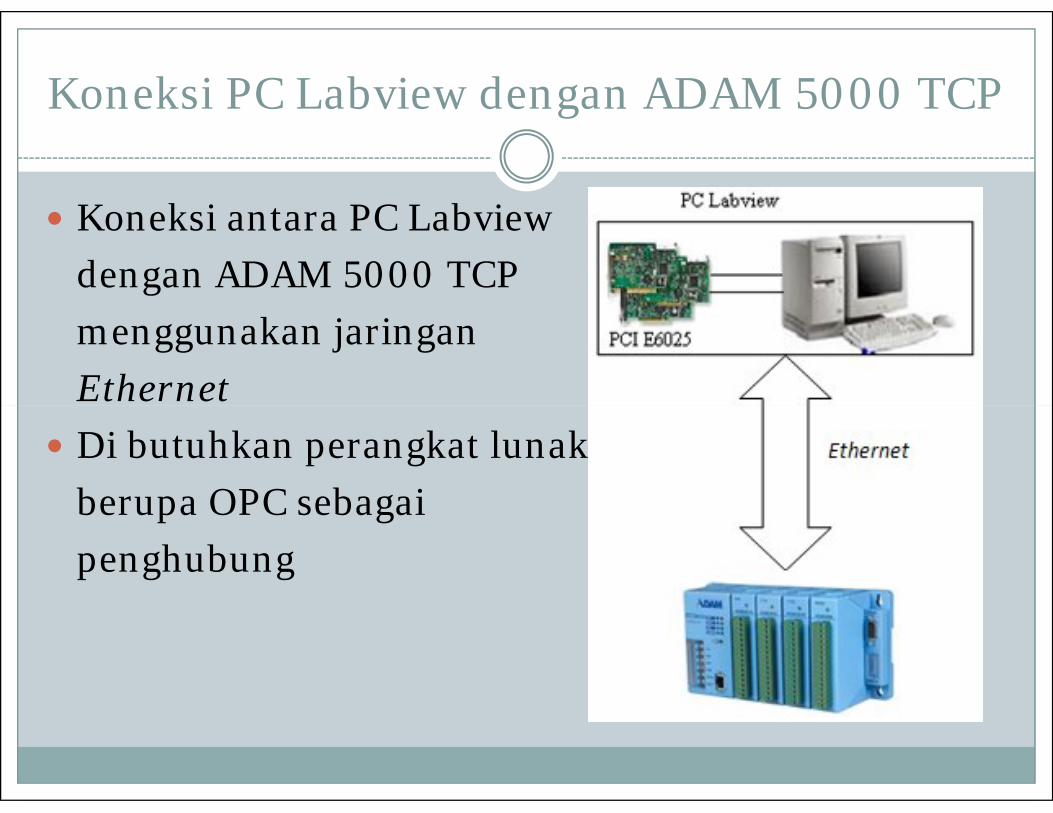
Koneksi PC Labview dengan ADAM 5000 TCP
Koneksi antara PC Labview
dengan ADAM 5000 TCP
menggunakan jaringan
EthernetEthernet
Di butuhkan perangkat lunak
berupa OPC sebagai
penghubung
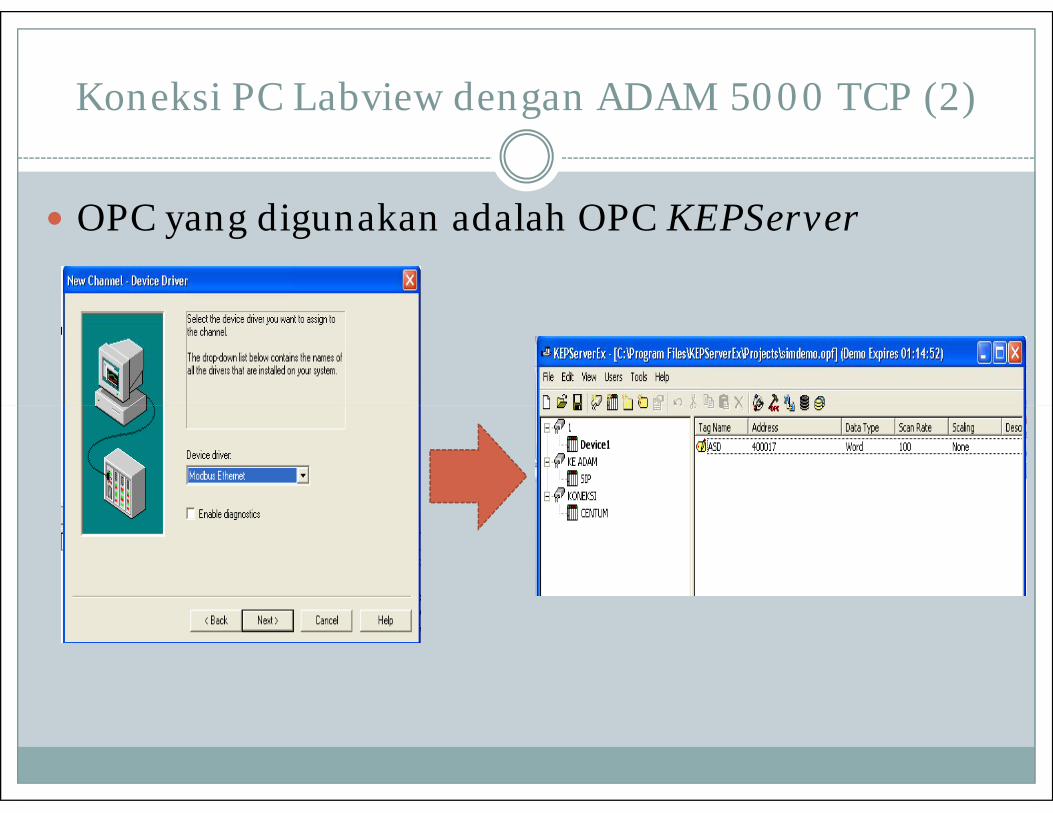
Koneksi PC Labview dengan ADAM 5000 TCP (2)
OPC yang digunakan adalah OPC KEPServer
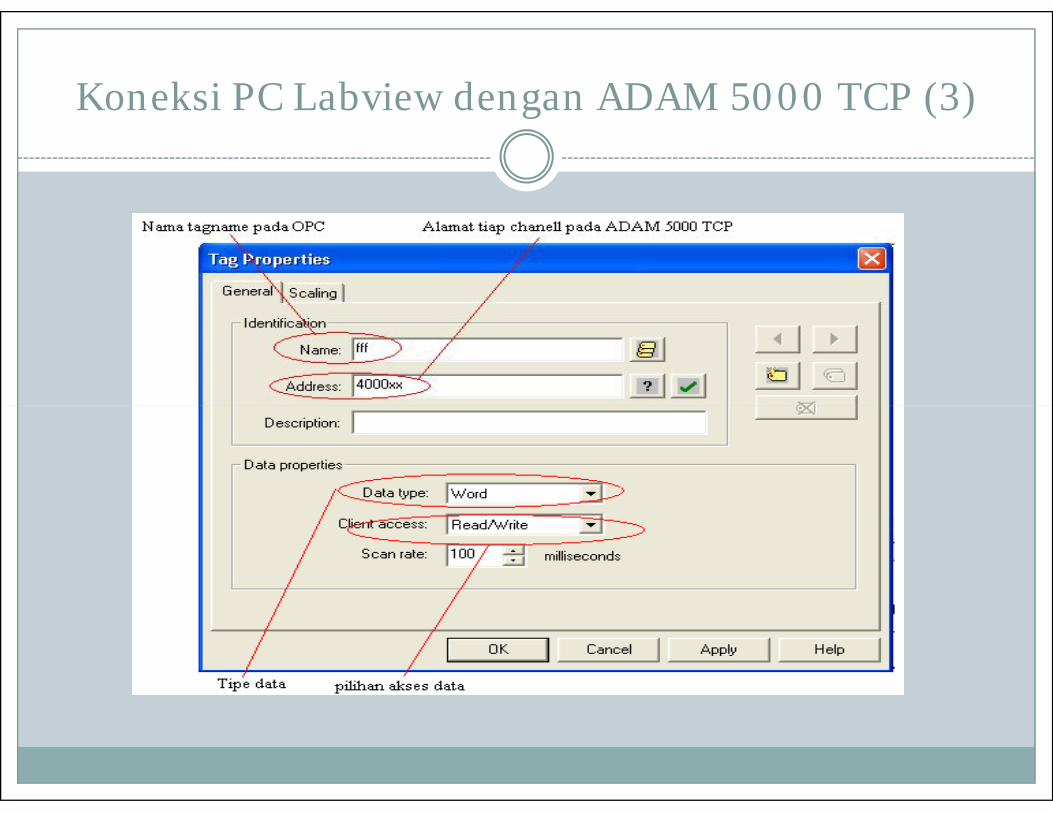
Koneksi PC Labview dengan ADAM 5000 TCP (3)
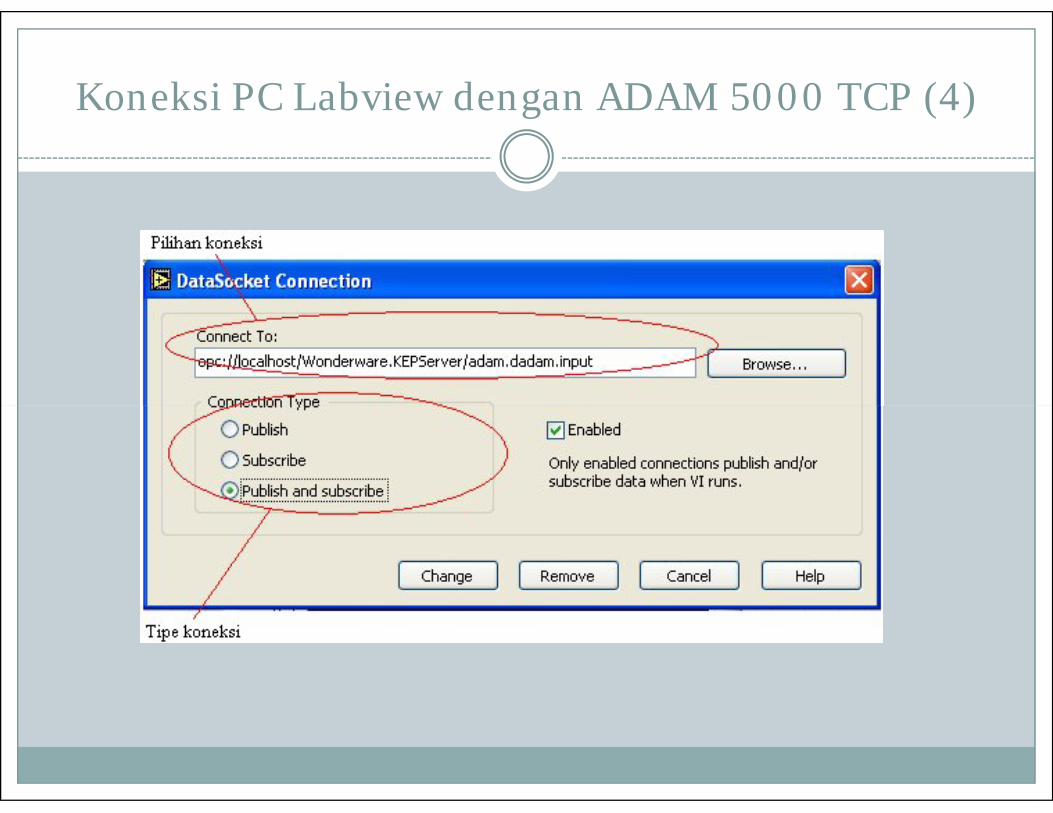
Koneksi PC Labview dengan ADAM 5000 TCP (4)
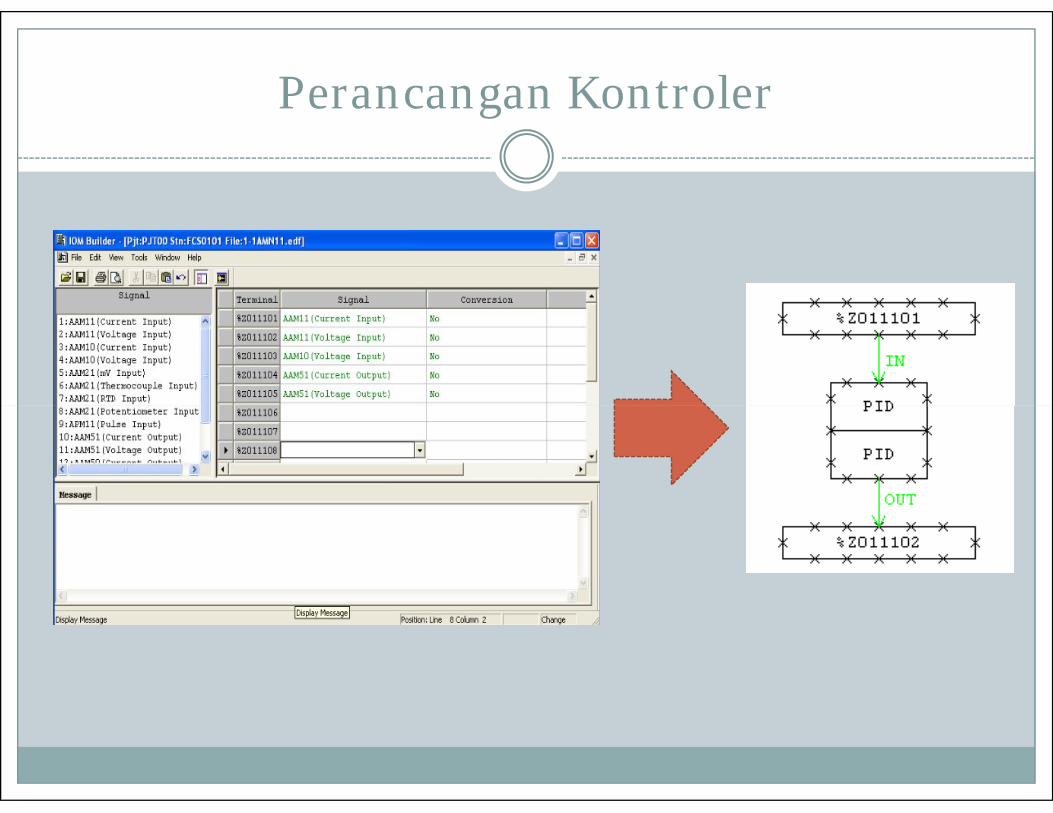
Perancangan Kontroler
Pengujian Sistem
Pengujian sistem dilakukan dengan dua plant dan dua keadaan :
Pengujian plant tanpa disturbancePlant virtual Plant virtual
Plant riil
Pengujian plant dengan disturbance Plant virtual
Plant riil
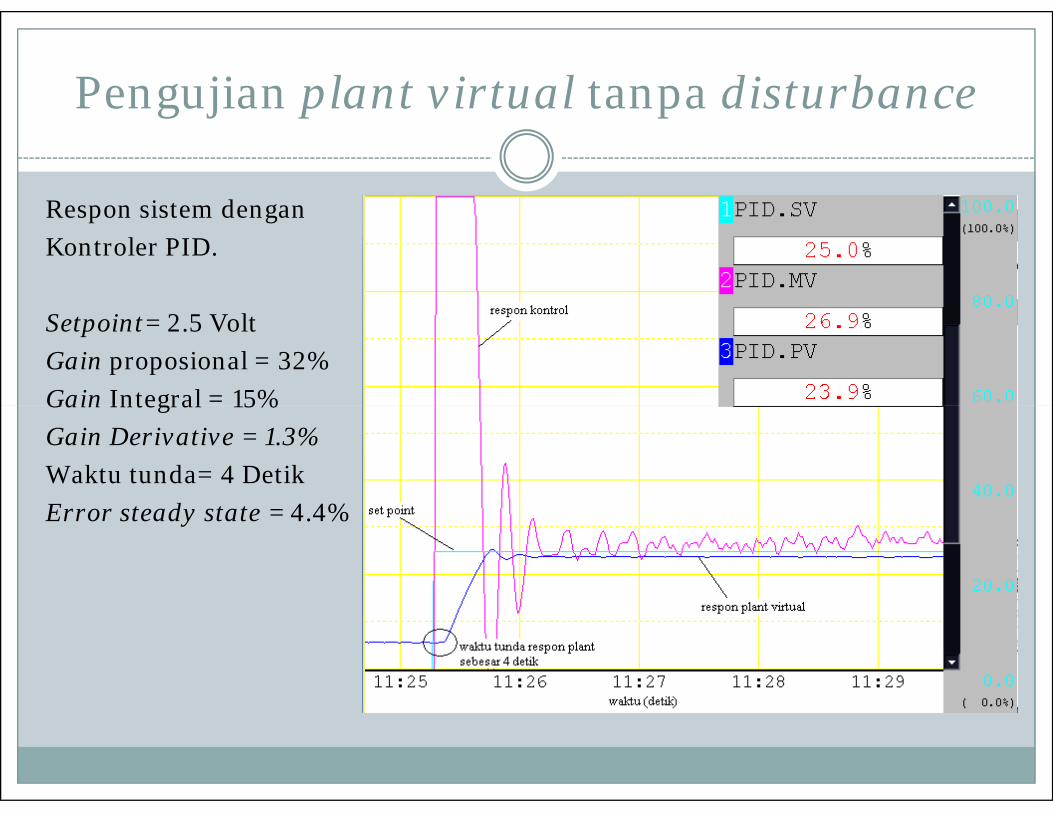
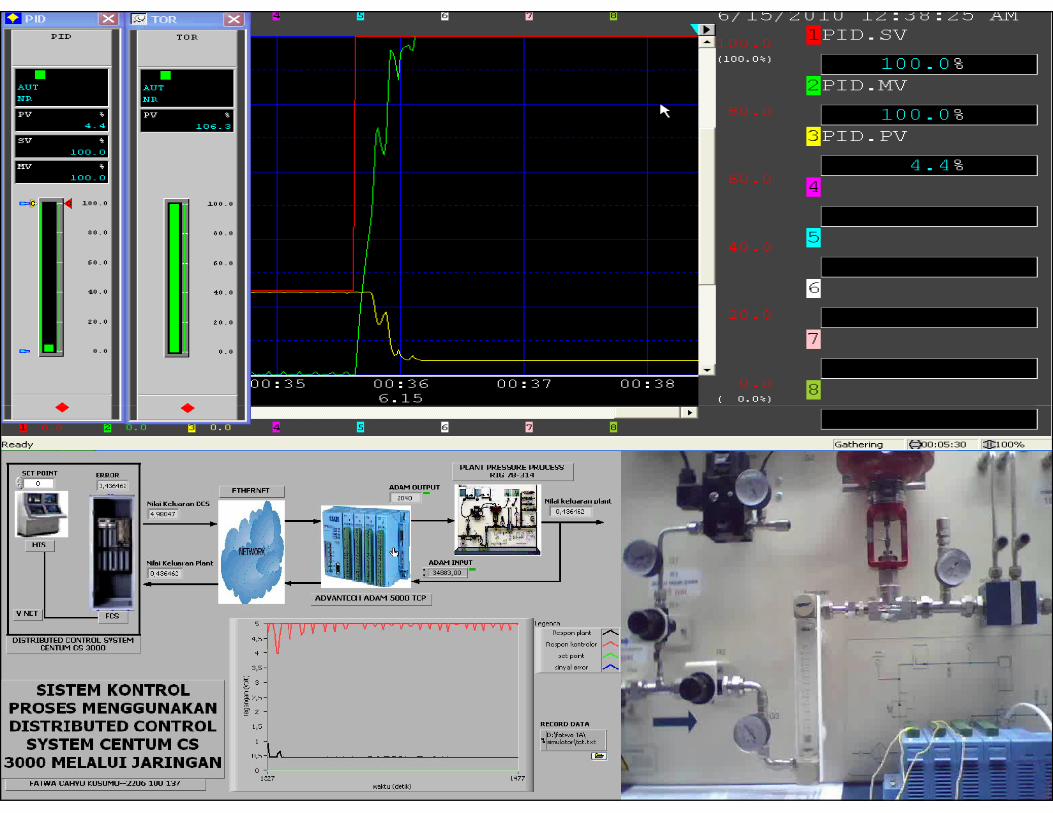
Pengujian plant virtual tanpa disturbance
Respon sistem dengan
Kontroler PID.
Setpoint= 2.5 Volt
Gain proposional = 32%
Gain Integral = 15%Gain Integral = 15%
Gain Derivative = 1.3%
Waktu tunda= 4 Detik
Error steady state = 4.4%
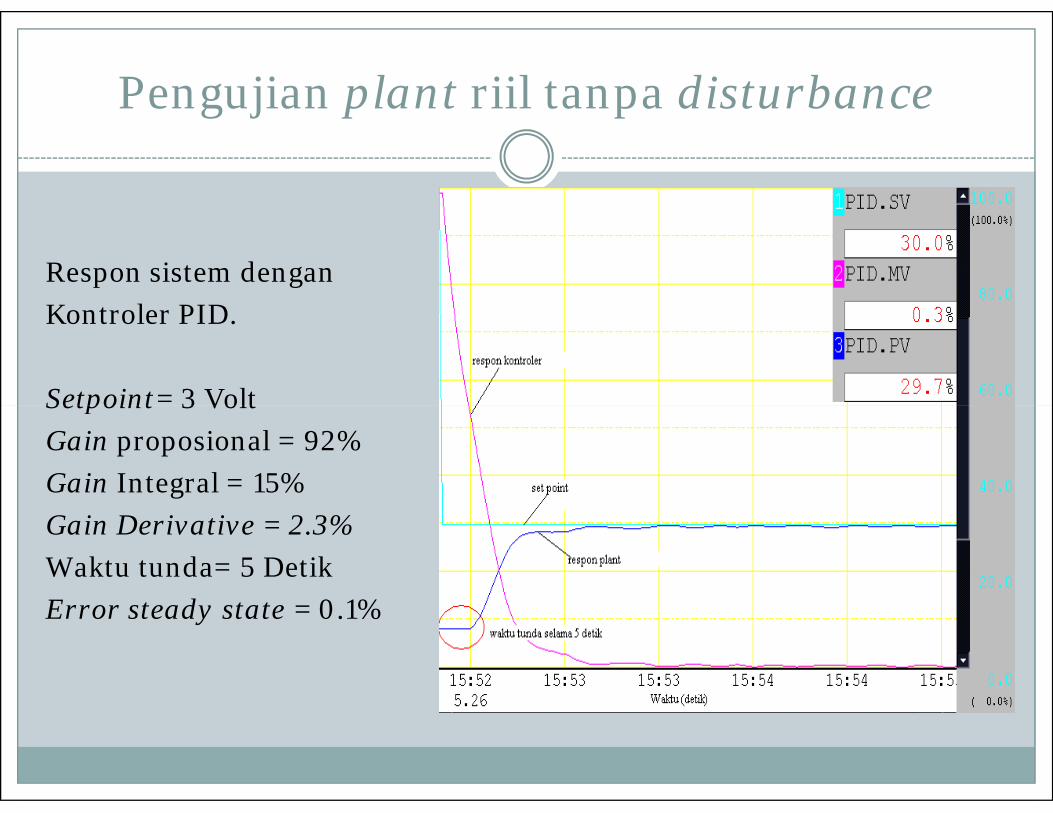
Pengujian plant riil tanpa disturbance
Respon sistem dengan
Kontroler PID.
Setpoint= 3 VoltSetpoint= 3 Volt
Gain proposional = 92%
Gain Integral = 15%
Gain Derivative = 2.3%
Waktu tunda= 5 Detik
Error steady state = 0.1%
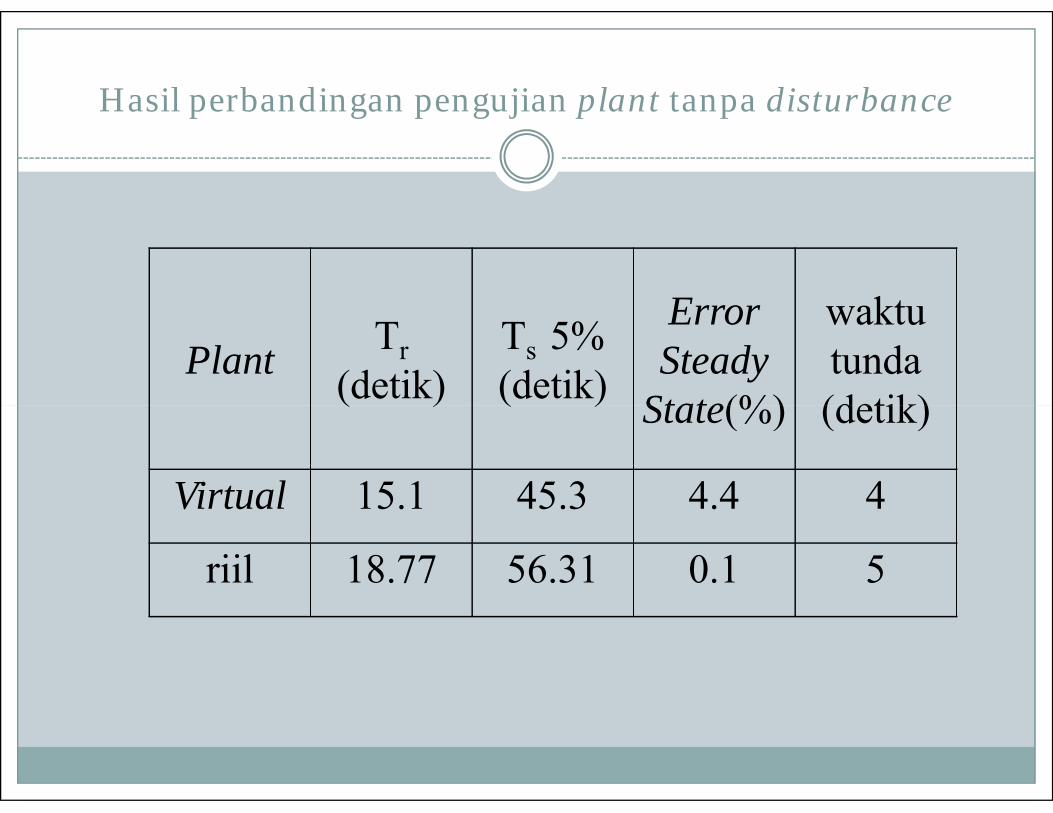
Hasil perbandingan pengujian plant tanpa disturbance
PlantΤr
(detik)Τs 5% (detik)
Error Steady
State(%)
waktu tunda (detik)
(detik) (detik)State(%) (detik)
Virtual 15.1 45.3 4.4 4
riil 18.77 56.31 0.1 5
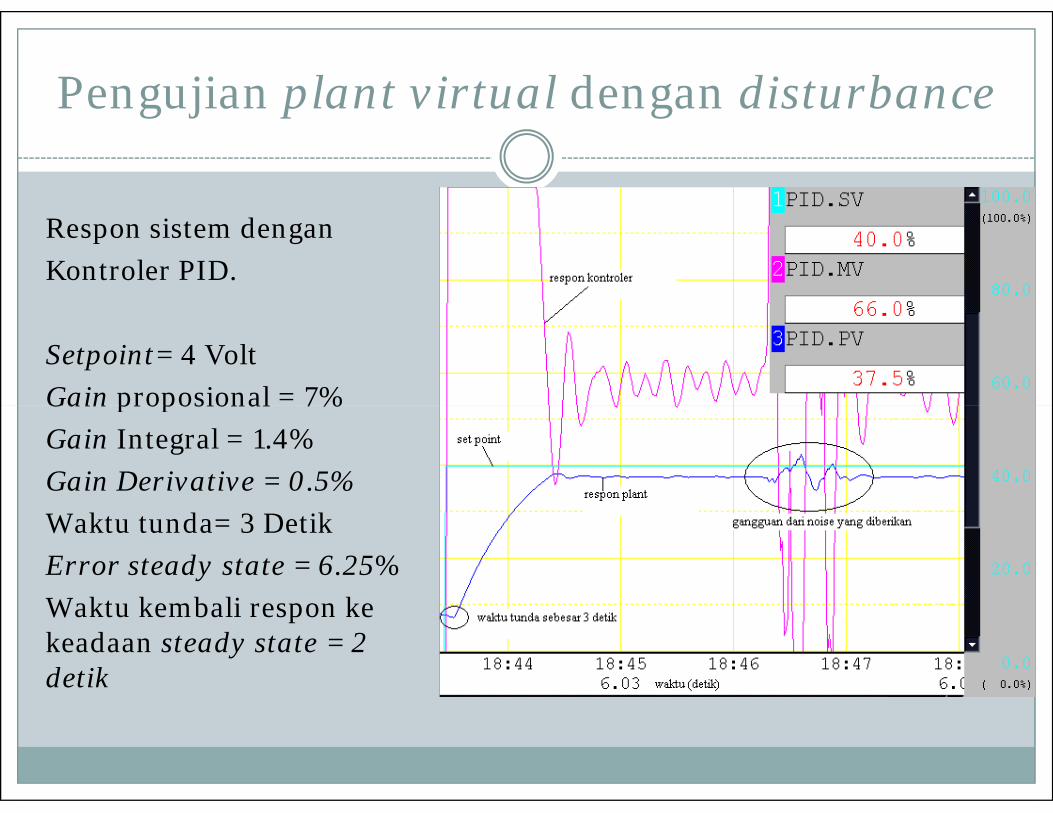
Pengujian plant virtual dengan disturbance
Respon sistem dengan
Kontroler PID.
Setpoint= 4 Volt
Gain proposional = 7%Gain proposional = 7%
Gain Integral = 1.4%
Gain Derivative = 0.5%
Waktu tunda= 3 Detik
Error steady state = 6.25%
Waktu kembali respon kekeadaan steady state = 2 detik
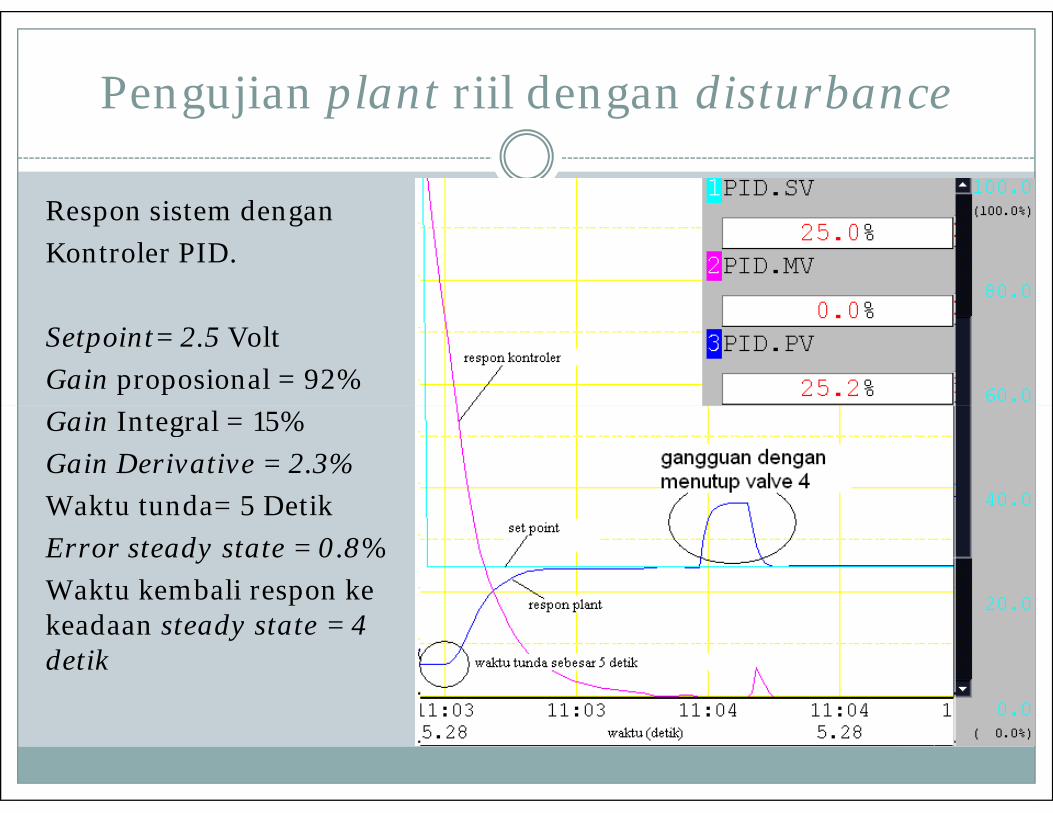
Pengujian plant riil dengan disturbance
Respon sistem dengan
Kontroler PID.
Setpoint= 2.5 Volt
Gain proposional = 92%
Gain Integral = 15%Gain Integral = 15%
Gain Derivative = 2.3%
Waktu tunda= 5 Detik
Error steady state = 0.8%
Waktu kembali respon kekeadaan steady state = 4 detik
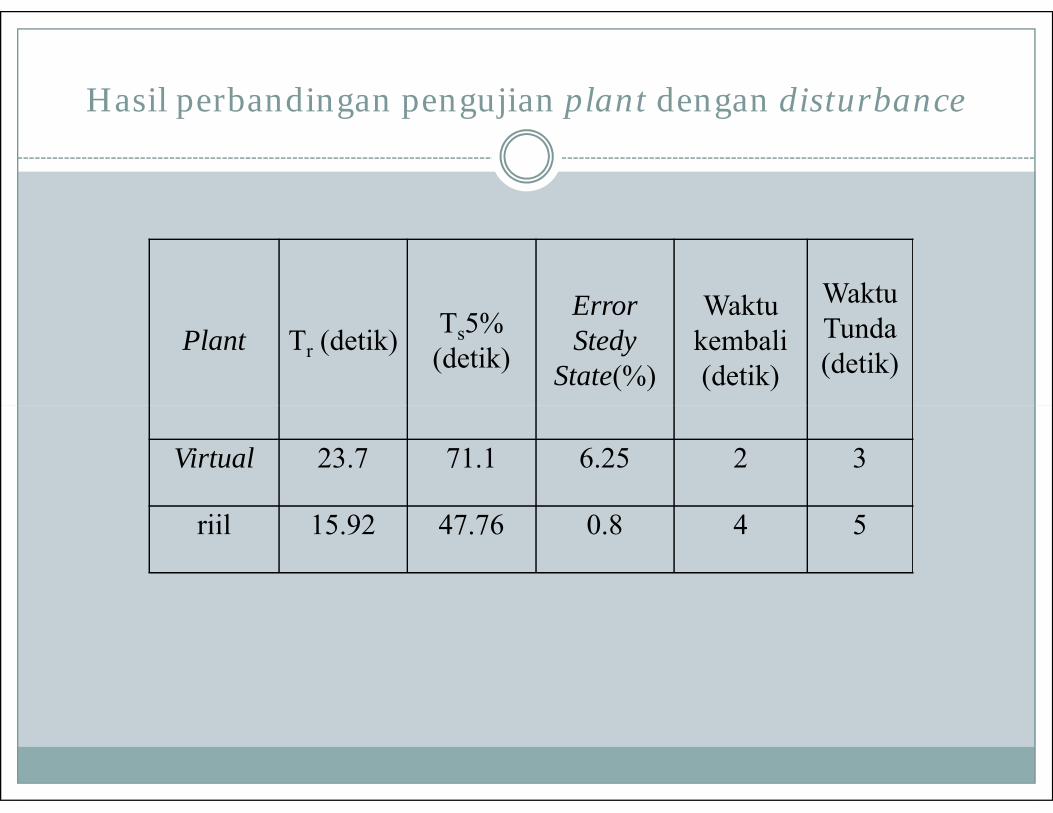
Hasil perbandingan pengujian plant dengan disturbance
Plant Τr (detik)Τs5% (detik)
Error Stedy
State(%)
Waktu kembali (detik)
Waktu Tunda(detik)
Virtual 23.7 71.1 6.25 2 3
riil 15.92 47.76 0.8 4 5
kesimpulan
Pada jaringan komunikasi untuk pengiriman data dan penerimaan data melalui jaringan menggunakan protokol TCP
Pada pengujian dengan menggunakan plant tanpa disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada pengujian ini, kesalahan waktu tunak terbesar terdapat pada plant virtual sebesar 4.4%. plant virtual sebesar 4.4%.
Pada pengujian dengan menggunakan plant dengan disturbance, waktu tunda terbesar terdapat pada penggunaan plant riil sebesar 5 detik. Pada percobaan ini, kesalahan waktu tunak terbesar terdapat pada plant virtual sebesar 6.25%.
Ketika plant virtual atau riil diberikan gangguan dan gangguan tesebut dihilangkan, waktu kembali respon plant ke keadaan tunak tercepat pada plant virtual, yaitu 2 detik. Kesalahan waktu tunda terbesar terdapat pada penggunaan plant virtual, yaitu 6.25%.
Video demo
TERIMA KASIH
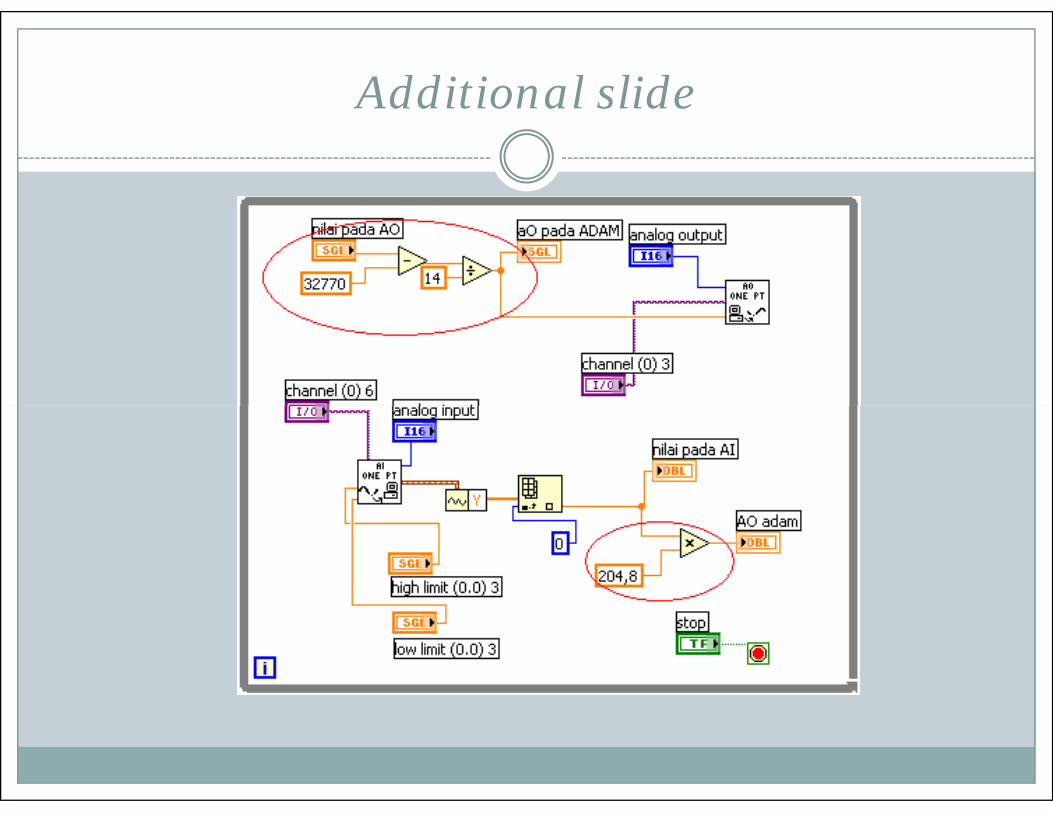
Additional slide




















