DAFTAR ISI - Web viewRangkaian Led Driver Serial menggunakan Microcontroller ATMEGA16 yang...
63
BUKU DIKTAT MIKROKONTROLLER Dibuat Oleh: Iswanto, S.T, M.Eng TEKNIK ELEKTRO MEDIK PROGRAM VOKASI UNIVERSITAS MUHAMMADIYAH YOGYAKARTA 2015 1
Transcript of DAFTAR ISI - Web viewRangkaian Led Driver Serial menggunakan Microcontroller ATMEGA16 yang...

BUKU DIKTAT
MIKROKONTROLLER
Dibuat Oleh:
Iswanto, S.T, M.Eng
TEKNIK ELEKTRO MEDIK
PROGRAM VOKASI
UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
2015
1

DAFTAR ISI
BUKU DIKTAT....................................................................................................................................1
MIKROKONTROLLER.......................................................................................................................1
DAFTAR ISI.............................................................................................................................................2
DAFTAR GAMBAR..................................................................................................................................4
BAB I PENGENALAN MIKROKONTROLER (OK)..........................................................................1
1.1. PENDAHULUAN.................................................................................................................1
1.2. MIKROKONTROLER AVR ATMEGA 16.....................................................................................1
1.3. KONFIGURASI PIN AVR ATMEGA 16.......................................................................................3
1.4. STRUKTUR MEMORI...............................................................................................................4
1.4.1. FLASH MEMORI.........................................................................................................4
1.4.2. MEMORI SRAM..............................................................................................................4
1.4.3. MEMORI EEPROM..........................................................................................................4
BAB II PENGENALAN BAHASA C...................................................................................................5
2.1. PENDAHULUAN......................................................................................................................5
2.2. Preprosesor............................................................................................................................5
2.3. Tipe Data................................................................................................................................5
2.4. Deklarasi Variabel , Konstanta dan Alamat I/O......................................................................5
2.5. Struktur Percabangan............................................................................................................7
2.6. Struktur Perulangan...............................................................................................................7
2.7. Fungsi dan Subrutin...............................................................................................................8
2.8. Operasi relasional (perbandingan).........................................................................................8
2.9. Operasi aritmatika.................................................................................................................8
2.10. Operasi logika dan biner....................................................................................................9
BAB III PORT SEBAGAI INPUT/OUTPUT DIGITAL(OK)............................................................10
3.1. PENDAHULUAN...............................................................................................................10
3.2. PORT...................................................................................................................................10
3.2.1. RANGKAIAN LAMPU LED......................................................................................10
3.2.2. PEMROGRAMAN MENYALAKAN LED................................................................11
3.2.3. RANGKAIAN PEMBACAAN KEYPAD DENGAN LCD........................................11
3.2.4. PEMROGRAMAN PEMBACAAN KEYPAD.................................................................12
3.2.4. RANGKAIAN SEVEN SEGMENT............................................................................14
2

3.2.5. PEMROGRAMAN SEVENT SEGMENT........................................................................15
3.3. PIN.......................................................................................................................................16
3.3.1. RANGKAIAN PEMBACAAN 8 TOMBOL...............................................................17
3.3.2. PEMROGRAMAN PEMBACAAN 8 BUAH TOMBOL............................................17
3.3.3. RANGKAIAN PEMBACAAN KEYPAD DENGAN LCD........................................18
3.3.4. PEMROGRAMAN PEMBACAAN KEYPAD.................................................................19
BAB IV ANALOG TO DIGITAL CONVERTER (OK).....................................................................22
4.1. PENDAHULUAN....................................................................................................................22
4.2. RANGKAIAN ADC ATMEGA DENGAN LED.............................................................................23
4.3. PEMROGRAMAN ADC ATMEGA16.......................................................................................23
BAB V TIMER / COUNTER (OK).....................................................................................................25
5.1. PENDAHULUAN....................................................................................................................25
5.2. TIMING DIAGRAM TIMER/COUNTER...................................................................................25
5.3. RANGKAIAN MENCACAH COUNTER TIMER T0.....................................................................27
5.4. PEMROGRAMAN MENCACAH COUNTER T0........................................................................28
5.5. PEMROGRAMAN MENCACAH COUNTER T0........................................................................29
BAB VI INTERUPSI (OK).................................................................................................................31
6.1. PENDAHULUAN...............................................................................................................31
6.2. RANGKAIAN INTERUPSI EKTERNAL......................................................................................32
6.3. PEMROGRAMAN INTERUPSI EKTERNAL INT0......................................................................32
6.4. PEMROGRAMAN INTERUPSI EKTERNAL INT1......................................................................34
6.5. RANGKAIAN INTERUPSI TIMER MIKROKONTROLLER...........................................................35
6.6. PEMROGRAMAN INTERUPSI TIMER 0..................................................................................36
6.7. PEMROGRAMAN INTERUPSI TIMER 1..................................................................................37
6.8. PEMROGRAMAN INTERUPSI TIMER 2..................................................................................38
BAB VII SERIAL PORT(OK)............................................................................................................40
7.1. PENDAHULUAN...............................................................................................................40
7.2. INISIALISASI USART.......................................................................................................40
7.3. RANGKAIAN SERIAL MIKROKONTROLLER..............................................................41
7.4. PEMROGRAMAN PORT SERIAL MIKROKONTROLLER............................................42
BAB VIII PWM(OK)..........................................................................................................................44
8.1. PENDAHULUAN....................................................................................................................44
8.2. RANGKAIAN PWM MIKROKONTROLLER..............................................................................45
8.3. PEMROGRAMAN PWM MIKROKONTROLLER.......................................................................46
3

4

DAFTAR GAMBAR
5

BAB I PENGENALAN MIKROKONTROLER (OK)
1.1. PENDAHULUAN
Mikrokontroler, jika diterjemahkan secara harfiah, berarti pengendali yang berukuran mikro.
Sekilas mikrokontroler hampir sama dengan mikroprosesor. Namun mikrokontroler memiliki
banyak komponen yang terintegrasi didalamnya, misalnya timer/counter.Sedangkan pada
mikroprosesor, komponen tersebut tidak terintegrasi. Mikroprosesor umumnya terdapat pada
komputer dimana tugas dari mikroprosesor adalah untuk memproses berbagai macam data
input maupun output dari berbagai sumber. Mikrokontroler lebih sesuai untuk tugas-tugas
yang lebih spesifik.
Gambar 1.1 Perbedaan mikrokontroler dengan mikroprosesor
1.2. MIKROKONTROLER AVR ATMEGA 16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur
RISC (Reduced Instruction Set Computer) yang ditingkatkan. Hampir semua instruksi
dieksekusi dalam satu siklus clock. AVR mempunyai 32 register generalpurpose,
timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART,
programmable Watchdog Timer, dan mode power saving. Mempunyai ADC dan PWM
internal. AVR juga mempunyai In-System Programmable Flash on-chip yang mengijinkan
memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
ATmega16 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang
ditingkatkan. Untuk lebih jelas tentang arsitektur dari ATmega16 ditunjukan pada gambar 1.1
ATmega16 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem
untuk mengoptimasi komsumsi daya versus kecepatan proses.
Beberapa keistimewaan dari AVR ATmega16 antara lain:
1

Keuntungan arsitektur RISC
� 130 Instruksi yang hebat – Kebanyakan satu detak untuk satu instruksi
� 32 x 8 General Purpose Fully Static Operation
� Up to 16 MIPS Throughput at 16 MHz
� On-chip 2-cycle Multiplier
Nonvolatile Program and Data Memories
� 8K Bytes of In-System Self-Programmable Flash
� Optional Boot Code Section with Independent Lock Bits
� 512 Bytes EEPROM
� 512 Bytes Internal SRAM
� Programming Lock for Software Security
Peripheral Features
� Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode
� Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
� One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and Capture
Mode
� Real Time Counter with Separate Oscillator
� Four PWM Channels
� 8-channel, 10-bit ADC
� Byte-oriented Two-wire Serial Interface
� Programmable Serial USART
Special Microcontroller Features
� Power-on Reset and Programmable Brown-out Detection
� Internal Calibrated RC Oscillator
� External and Internal Interrupt Sources
� Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down, Standby
and Extended Standby
� 5. I/O and Package
� 32 Programmable I/O Lines
� 40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF
Operating Voltages
� 2.7 - 5.5V for ATmega16L
� 4.5 - 5.5V for Atmega16
2

Gambar 1.2 Arsitektur ATMEGA16
1.3. KONFIGURASI PIN AVR ATMEGA 16
Pin-pin pada ATmega16 dengan kemasan 40-pin DIP (dual inline package)
ditunjukkan oleh gambar 1.2 Kemasan pin tersebut terdiri dari 4 Port yaitu Port A, Port B,
Port C,Port D yang masing masing Port terdiri dari 8 buah pin. Selain itu juga terdapat
RESET, VCC, GND 2 buah, VCC, AVCC, XTAL1, XTAL2 dan AREF.
Gambar 1.3 Pin -pin ATmega16 kemasan 40 -pin
3

1.4. STRUKTUR MEMORI
Untuk memaksimalkan performa dan paralelisme, AVR menggunakan arsitektur
Harvard (dengan memori dan bus terpisah untuk program dan data). Instruksi pada memori
program dieksekusi dengan pipelining single level. Selagi sebuah instruksi sedang dikerjakan,
instruksi berikutnya diambil dari memori program.
1.4.1. FLASH MEMORI
ATmega16 memiliki 16K byte flash memori dengan lebar 16 atau 32 bit. Kapasitas memori
itu sendiri terbagi manjadi dua bagian yaitu bagian boot program dan bagian aplikasi
program. Flash memori memiliki kemampuan mencapai 10.000 write dan erase.
1.4.2. MEMORI SRAM
Penempatan memori data yang lebih rendah dari 1120 menunjukkan register, I/O memori,
dan data internal SRAM. 96 alamatmemori pertama untuk file register dan memori I/O, dan
1024 alamat memori berikutnya untuk data internal SRAM. Lima mode pengalamatan yang
berbeda pada data memori yaitu direct, indirect, indirect dis-placement, indirect pre-
decreament dan indirect post-increament .Pada file register, mode indirect mulai dari register
R26-R31.
Pengalamatan mode direct mencapai keseuruhan kapasitas data. Pengalamatan mode indirect
displacement mencapai 63 alamat memori dari register X atau Y. Ketika meggunakan mode
pengalamatan indirect dengan predecrement dan post increment register X, Y, dan Z akan di-
dicrement-kan atau di-increment-kan. Pada ATmega16 memiliki 32 register, 64 register I/O
dan 1024 data internal SRAM yang dapat mengakses semua mode-mode pengalamatan.
1.4.3. MEMORI EEPROM
Pada EEPROM ATmega16 memiliki memori. Memori yang dimiliki sebesar 512 byte.
Memori tersebut memiliki daya tahan 100.000 siklus write/read.
4

BAB II PENGENALAN BAHASA C
2.1. PENDAHULUAN
Bahasa pemrograman C adalah sebuah bahasa 'mid-level', namun memiliki fitur 'highlevel'
(seperti support pada fungsi dan modul) dan juga memiliki fitur 'lowlevel' (seperti mengakses
hardware melalui pointer). Dengan menggunakan bahasa C, kita dapat dengan mudah untuk
pindah ke jenis mikrokontroler yang lain, lebih mudah dan cepat dalam menulis kode
program, dan lebih mudah dimengerti, dan lebih mudah dalam melakukan debugging. Berikut
penjelasan kode kode dasar bahasa C untuk pemrograman mikrokontroler keluarga MCS51
yang sering digunakan:
2.2. PREPROSESOR
Merupakan bagian program yang digunakan untuk mendefenisikan library berupa file header
(*.h) yang ikutkan (include) ke dalam program. Beberapa contoh penggunaannya:
#include //mengikutsertakan file at89x51.h #include #include
2.3. TIPE DATA
char : 1 byte ( -128 s/d 127 )
unsigned char : 1 byte ( 0 s/d 255 )
int : 2 byte ( -32768 s/d 32767 )
unsigned int : 2 byte ( 0 s/d 65535 )
long : 4 byte ( -2147483648 s/d 2147483647 )
unsigned long : 4 byte ( 0 s/d 4294967295 )
float : bilangan desimal
array : kumpulan data-data yang sama tipenya.
Terkadang untuk mendefenisikan tipe data dengan nama tersendiri dapat menggunakan
keyword typedef.
Perhatikan contoh berikut : typedef unsigned char ubyte;
ubyte merupakan nama lain dari tipe data unsigned char
2.4. DEKLARASI VARIABEL , KONSTANTA DAN ALAMAT I/O
Variabel merupakan lokasi memori tempat penyimpanan data yang nilai datanya dapat
diubah pada saat program dijalankan. Sementara Konstanta merupakan lokasi memori
penyimpan data yang nilai datanya tetap/konstan.
5

Ketika kita mendeklarasikan suatu variabel atau konstanta secara otomatis compiler bahasa C
akan mengalokasikan sebuah lokasi memori pada RAM internal MCS51 yang akan
digunakan untuk menyimpan nilai data dari variabel/konstanta tersebut. Untuk
mendeklarasikan variabel data penulisan kode programnya sebagai berikut: [tipe data] [nama
variabel] [= nilai awal (Optional)]
Contoh:
int counter = 0;
unsigned char sum;
Untuk mendeklarasikan konstanta penulisannya adalah sebagai berikut:
[#define] [nama konstanta] [nilai konstanta]
Contoh:
#define phi 3.14
#define data_led 0xFF
Selain variabel dan konstanta kita juga dapat mendeklarasikan sebuah variabel data dari
sebuah PORT I/O atau Memori External dengan alamat tertentu. Yaitu dengan cara
mengalokasikan lokasi memori /alamat PORT I/O secara manual menggunakan kata kunci
xdata at(alamat)
Contoh penggunaan xdata at(0x4002)
#include
xdata at(0x4002)
unsigned char PORT_LED;
unsigned char data_led
void main()
{ PORT_LED = 0x40; }
Pada contoh program diatas, alamat 0x4002 dialokasikan sebagai alamat
PORT_LED.Alamat external ini merupakan alamat yang dikeluarkan melaui Bus Alamat dari
MCS51. Tipe data yang harus digunakan untuk mendeklarasikan sebuah PORT adalah
unsigned char.
Contoh
menuliskan/mengeluarkan data ke sebuah PORT Output
[nama_port] = [data_port]
PORT_LED = 0x40;
membaca data dari sebuah PORT Input
[variabel_data] = [nama_port]
6

data_led = PORT_LED;
2.5. STRUKTUR PERCABANGAN
Struktur percabangan digunakan untuk memilih atau menyeleksi kondisi yang dipersyaratkan
dalam mengeksekusi perintah dalam pemrograman.
Bentuk penulisannya
If (kondisi1) {perintah1 } else{perintah2}
if(a==0xff){ b=0x1f; }else{ b=0x00; }
Jika kondisi1 terpenehi maka barisan perintah1 dieksekusi, jika kondisi1 tidak terpenuhi
maka barisan perintah2 yang dieksekusi.
If (kondisi1){perintah1} else if(kondisi2) {perintah2}
if(a==0xff){ b=0x1f; }else if(a==0x00){ b=0x00; }
Jika kondisi1 terpenuhi maka barisan perintah1 dieksekusi, jika kondisi1 tidak terpenuhi
tetapi kondisi2 terpenuhi maka barisan perintah2 yang dieksekusi.
if (kondisi1){perintah1}else if(kondisi2){pernitah2} else{perintah3}
if(a==0xff){ b=0x1f; }else if(a==0x00){ b=0x00; }else{ b = 0xff; }
Jika kondisi1 terpenuhi maka barisan perintah1 dieksekusi, jika kondisi1 tidak terpenuhi
tetapi kondisi2 terpenuhi maka barisan perintah2 yang dieksekusi, dan jika tidak ada kondisi
yang terpenuhi maka barisan perintah3 yang dieksekusi.
2.6. STRUKTUR PERULANGAN
Struktur perulangan digunakan untuk mengeksekusi barisan perintah secara berulang sesuai
dengan kondisi atau jumlah perulangan yang dipersyaratkan.
Perulangan dengan for
Pada Perulangan ini looping dilakukan sesuai dengan jumlah yang ditentukan.
Contoh: for (n=0;n0;n--){ b= b+1; }
Baris perintah b=b+1 akan dieksekusi berulangkali .dimana perulangan eksekusi dilakukan
sebanyak 10 kali dari n = 10 (kondisi awal) s/d n = 1 (kondisi akhir n > 0).nilai n akan
berkurang setiap perulangan (n--).
Perulangan dengan while
Perulangan jenis ini kan melakukan looping selama kondisi yang dipersyaratkan terpenuhi.
Contoh
PORT_LED2 = 0xFF;
while(data_led !=0xFF){ data_led = PORT_LED1; } PORT_LED2 = 0x00;
7

Kondisi awal PORT_LED2 adalah 0xFF kemudian program akan melakukan perulangan
while(). Pada perulangan ini program akan mengeksekusi perintah data_led = PORT_LED1
atau perintah membaca data pada PORT_LED1 berulangkali. Selama data_led tidak sama (!
=) dengan 0xFF maka perulangan akan terus terjadi. ketikadata_led=0xFF maka perulangan
akan berhenti. Dan program akan lanjut ke baris perintah dibawahnya yaitu perintah
PORT_LED2 = 0x00.
2.7. FUNGSI DAN SUBRUTIN
Fungsi adalah blok program yang digunakan untuk melakukan sekumpulan instruksi akan
mengembalikan nilai tertentu setelah semua instruksi dilaksanakan. Subrutin adalah blok
program yang digunakan untuk melakukan sekumpulan instruksi tertentu. Perbedaannya
dengan fungsi adalah subrutin hanya menjalankan sekumpulan instruksi dan tidak
mengembalikan nilai tertentu.
//contoh subrutin void counter_up(){ counter++; } //contoh fungsi int kalikan(int ct){ int
temp; temp = 2 * ct; return temp; //pengembalian nilai }
Prototype fungsi dan subrutin
Jika sebuah penulisan kode fungsi atau subrutin berada dibawah program utama (subrutin
main()), agar fungsi atau subrutin tersebut dapat dipanggil oleh program utama maka perlu
dilakukan deklarasi fungsi/subrutin atau yang disebut dengan prototype. Perhatikan contoh
berikut:
#include
int hasil = 0; int counter = 0; int kalikan(int); //prototype fungsi kalikan void counter_up();
//prototype subrutin counter_up void main(){ counter_up(); hasil = kalikan(counter); } void
counter_up(){ counter++; } int kalikan(int ct){ int temp; temp = 2 * ct; return temp; }
2.8. OPERASI RELASIONAL (PERBANDINGAN)
Sama dengan : ==
Tidak sama dengan : !=
Lebih besar : >
Lebih besar sama dengan : >=
Lebih kecil : <
Lebih kecil sama dengan : <=
8

2.9. OPERASI ARITMATIKA
+ , – , * , / : tambah,kurang,kali,bagi += , -= , *= , /= : nilai di sebelah kiri operator di
tambah/kurang/kali/bagi dengan nilai di sebelah kanan operator % : sisa bagi ++ , — :
tambah satu (increment) , kurang satu (decrement) Contoh : a = 5 * 6 + 2 / 2 -1 ; maka nilai a
adalah 30 a *= 5 ; jika nilai awal a adalah 30, maka nilai a = 30×5 = 150. a += 3 ; jika nilai
awal a adalah 30, maka nilai a = 30+5 = 33. a++ ; jika nilai awal a adalah 5 maka nilai a =
a+1 = 6. a– ; jika nilai awal a adalah 5 maka nilai a = a-1 = 4.
2.10. OPERASI LOGIKA DAN BINER
Logika Logika AND :&& Logika NOT : ! Logika OR : || Biner AND : & Biner OR : | Biner
XOR : ^ Shift right biner: >> Shift left biner : << Komplemen : ~ Beberapa struktur dan
elemen bahasa C lainnya dapat dilihat pada literatur yang ada baik di-internet maupun di
buku.
9

BAB III PORT SEBAGAI INPUT/OUTPUT DIGITAL(OK)
3.1. PENDAHULUAN
ATmega16 mempunyai empat buah port yang bernama PortA, PortB, PortC, dan
PortD. Keempat port tersebut merupakan jalur bidirectional dengan pilihan internal pull-up.
Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn, dan PINxn. Huruf
‘x’mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor bit. Bit DDxn
terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address PORTx, dan bit
PINxn terdapat pada I/O address PINx. Bit DDxn dalam regiter DDRx (Data Direction
Register) menentukan arah pin.
3.2. PORT
Bila DDxn diset 1 maka Px berfungsi sebagai pin output. Bila PORTxn diset 1 pada
saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn
diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat
mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high
(DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled
(DDxn=0, PORTxn=1) atau kondisi output low (DDxn=1, PORTxn=0).
Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan
impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan
sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset
1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan
pullup ke kondisi output low juga menimbulkan masalah yang sama. Kita harus
menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1,
PORTxn=0) sebagai kondisi transisi.
3.2.1. RANGKAIAN LAMPU LED
Rangkaian minimum untuk menghidupkan 8 LED melalui Port B ditunjukan pada
Gambar 3.1. yang perlu diperhatikan adalah konfigurasi rangkaian LED yaitu Common
Anode (CA) artinya untuk menghidupkan LED pada Port B, port B harus dikirim atau diberi
logika ‘0’.
10

S W 1
12
C 3 1 0 0 n F
V C C
V C C
R 1
X1
C 1 2 2 p F
V C C
V C C
U 1
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
R S T
C 2 2 2 p F
Gambar 3.1 Hasil pemasangan komponen rangkaian lampu led
3.2.2. PEMROGRAMAN MENYALAKAN LED
Setelah rangkaian LED dibuat dan dihubungkan dengan port pararel mikrokontroller,
maka sekarang saatnya Anda membuat program yang digunakan untuk menghidupkan LED
tersebut.
Program sebagai berikut ini
//-------------------------------------------------------// Program LED Menyala// DEKLARASI HEADER//-------------------------------------------------------#include <mega16.h>#include <delay.h>//-------------------------------------------------------//RUTIN UTAMA//-------------------------------------------------------void main(void){ char a; a=0x000; DDRB=0xFF; while(1) { PORTB = a; }}
11

3.2.3. RANGKAIAN PEMBACAAN KEYPAD DENGAN LCD
Rangkaian tombol 4x4 adalah rangkaian untuk membaca tombol 4x4 dari port
keluaran mikrokontroller. Pada saat penekanan tombol key pad, data dari key pad akan
ditampilkan dengan port serial komputer.
S 8
S W
S 1 1
S W
P D 2
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A IN 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 ( IN T0 )P D 3 ( IN T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [S C K )P B 6 [M IS O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 /A IN 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 ( IC P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
J 5
H E A D E R 5
12345
p in b .6
P D 0X1
P D 5
S 1 7
S W
P D 1
C 3 1 0 0 n F 1
p in b .0
S W 2
12
D 3
1 N 4 0 0 2
AC
S 5
S W
p in b . 6
V C C
S 9
S W
P D 7
p in b .7
p in b .0
J 1 6 .
H E A D E R 1 6
123456789
1 01 11 21 31 41 51 6
P D 1
p in b . 6
P D 6
C 2 2 2 p F
P D 4S 1 5
S W
P D 6
p in b . 6
S 1 2
S W
p in b .5
S 1 8
S W
P D 5
S 1 6
S W
R S T
P D 2
p in b .1
P D 7
S 6
S W
p in b .7
p in b . 7
p in b .2
S 1 3
S W
C 1 2 2 p F
P D 3
p in b . 7
P D 0
S 1 0
S W
V C C
p in b .6
p in b . 7
S 1 9
S W
p in b .5
R 1
P D 3
V C C
V C C
p in b .1
R 95 k
V C C
V C C
S 4
S W
S 7
S W
S 1 4
S W
p in b .2
p in b .4
P D 4
p in b . 5
Gambar 3. 2Rangkaian aplikasi tombol keypad dengan lcd
3.2.4. PEMROGRAMAN PEMBACAAN KEYPAD
Setelah rangkaian tombol 4x4 dibuat dan dihubungkan dengan port pararel
mikrokontroller, maka sekarang saatnya Anda membuat program Program pembacaan
tombol. 4x4.
Program sebagai berikut ini
//------------------------------------------------------//Program KEYPAD LCD
12

//DEKLARASI HEADER//------------------------------------------------------#include <lcd.h>#include <stdio.h>#include <mega16.h>#include <delay.h>//------------------------------------------------------//DEKLARASI PIN LCD//------------------------------------------------------#asm.equ __lcd_port=0x18;PORTB#endasm//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char dt, dtkey;char buf[33];//------------------------------------------------------//DEKLARASI SUB RUTIN KEYPAD//------------------------------------------------------void inkey(void);//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main(){ PORTD = 0XFF; DDRD=0xF0; lcd_init(16); lcd_gotoxy(0,1); lcd_putsf("Hello world"); while(1) { inkey(); lcd_gotoxy(0,1); sprintf(buf,"hex %x ",dtkey); lcd_puts(buf); }}//------------------------------------------------------//SUB RUTIN KEYPAD//------------------------------------------------------void inkey(void){PORTD.4 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x01; break;case 2:dtkey = 0x05;
13

break;case 4:dtkey = 0x09; break;case 8:dtkey = 0x13; break;}PORTD.4 = 1;PORTD.5 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x02; break;case 2:dtkey = 0x06; break;case 4:dtkey = 0x10; break;case 8:dtkey = 0x14; break;}PORTD.5 = 1;PORTD.6 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x03; break;case 2:dtkey = 0x07; break;case 4:dtkey = 0x11; break;case 8:dtkey = 0x15; break;}PORTD.6 = 1;PORTD.7 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x04; break;case 2:dtkey = 0x08; break;case 4:dtkey = 0x12; break;case 8:dtkey = 0x16; break;}PORTD.7 = 1;}
14

3.2.4. RANGKAIAN SEVEN SEGMENT
Rangkaian seven segment tunggal adalah rangkaian untuk menggerakkan penampil 7
segment secara langsung dari port keluaran mikrokontroller. Penampil seven segment yang
digunakan common anoda. Data yang digunakan untuk menghasilkan angka atau huruf
tertentu didapatkan dengan cara seperti pada Tabel 4.1
10985421
6
3
P 2
P D 5
P 6
P 7
P D 2
P 4
P 1
P D 3
P D 4
P D 0
P D 1
V C C
R 1
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2(I N T2 /A I N 0 )
XTA L2XTA L1
P B 1(T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M IS O )P B 5(M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0(XC K /T0 )
P B 3(O C 0 /A I N 1 )P B 4(S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
P 6
P D 5
P D 4
C 1 2 2 pF
V C C
P D 7
P D 6
C 3 1 0 0 n F 1
P 5
P 5
S W 2
12
P 3
P D 0
V C C
R S T
P D 7
P 0
P D 3
J IS P
H E A D E R 5
12345
C 2 2 2 pF
P D 6
R S TP 7
X1
V C C
P D 2
G N D
P D 1
Gambar 3. 3 Rangkaian aplikasi penggerak seven segmen tunggal
3.2.5. PEMROGRAMAN SEVENT SEGMENT
Setelah rangkaian seven segment dibuat dan dihubungkan dengan port pararel
mikrokontroller, maka sekarang saatnya anda membuat program Program Seven Segment 1.
Program ini digunakan untuk menampilkan data 3 dan 2 secara bergantian.
Program sebagai berikut ini
//-------------------------------------------------------// Program Sevent Segmen Tunggal// DEKLARASI HEADER//-------------------------------------------------------#include <mega16.h>#include <delay.h>//-------------------------------------------------------//SUB RUTIN//-------------------------------------------------------void bin7seg(unsigned char data1){ switch(data1) { case 0 : PORTD = 0xc0; break;
15

case 1 : PORTD = 0xf9; break; case 2 : PORTD = 0xa4; break; case 3 : PORTD = 0xb0; break; case 4 : PORTD = 0x99; break; case 5 : PORTD = 0x92; break; case 6 : PORTD = 0x82; break; case 7 : PORTD = 0xf8; break; case 8 : PORTD = 0x80; break; case 9 : PORTD = 0x90; break; }}//-------------------------------------------------------//RUTIN UTAMA//-------------------------------------------------------void main(void){DDRD=0xFF;while(1) { bin7seg(0); delay_ms(100); bin7seg(2); delay_ms(100); }}
3.3. PIN
Bila DDxn diset 0 maka Px berfungsi sebagai pin input. Bila PORTxn diset 1 pada
saat pin terkonfigurasi sebagai pin input, maka resistor pull-up akan diaktifkan. Untuk
mematikan resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output.
Pin port adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat pin
16

terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn diset 0
pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0. Saat
mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0) ke kondisi output high
(DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu kondisi pull-up enabled
(DDxn=0, PORTxn=1)atau kondisi output low (DDxn=1, PORTxn=0).
Biasanya, kondisi pull-up enabled dapat diterima sepenuhnya, selama lingkungan
impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high driver dengan
sebuah pull-up. Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset
1 untuk mematikan semua pull-up dalam semua port. Peralihan dari kondisi input dengan
pullup ke kondisi output low juga menimbulkan masalah yang sama. Kita harus
menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi output high (DDxn=1,
PORTxn=0) sebagai kondisi transisi.
Bit 2 – PUD : Pull-up Disable. Bila bit diset bernilai 1 maka pull-up pada port I/O akan
dimatikan walaupun register DDxn dan PORTxn dikonfigurasikan untuk menyalakan pull-up
(DDxn=0, PORTxn=1).
3.3.1. RANGKAIAN PEMBACAAN 8 TOMBOL
Rangkaian pembacaan 8 buah tombol adalah rangkaian untuk membaca penekanan tombol
yang terhubung pada port keluaran mikrokontroller yang hasilnya tertampil pada led .
P O R TC . 6U 1
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K /T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
P O R TC . 1
P O R TC . 4
P O R TC . 5
V C C
C 2 2 2 p F
C 1 2 2 p F
V C C
V C C
P O R TC . 0
R S T
P O R TC . 6
P O R TC . 1
V C C
P O R TC . 4
P O R TC . 7
C 3 1 0 0 n F
J P 3
R -P A C K
123456789
P O R TC . 2
R 1
P O R TC . 7
P O R TC . 5
P O R TC . 3
V C C
S W 1
12
P O R TC . 0
P O R TC . 3
X1
P O R TC . 2
Gambar 3.4 Rangkaian aplikasi pembacaan 8 buah tombol
3.3.2. PEMROGRAMAN PEMBACAAN 8 BUAH TOMBOL
Setelah rangkaian tombol dibuat dan dihubungkan dengan port pararel
mikrokontroller, maka sekarang saatnya Anda membuat program pembacaan tombol.
Program sebagai berikut ini
17

//-------------------------------------------------------//Program Program pembacaan 8 buah tombol//DEKLARASI HEADER//-------------------------------------------------------#include <mega16.h>#include <delay.h>//-------------------------------------------------------//RUTIN UTAMA//-------------------------------------------------------void main(void){DDRC=0x00;DDRB=0xFF;while(1) { PORTB = PINC; }}
3.3.3. RANGKAIAN PEMBACAAN KEYPAD DENGAN LCD
Rangkaian tombol 4x4 adalah rangkaian untuk membaca tombol 4x4 dari port
keluaran mikrokontroller. Pada saat penekanan tombol key pad, data dari key pad akan
ditampilkan dengan port serial komputer.
18

S 8
S W
S 11
S W
P D 2
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3635343332
37
1
45
9
1 41 5
2 0 21
403938
31302928272625242322
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 ( IN T0 )P D 3 ( IN T1 )P D 4 (O C 1B )P D 5 (O C 1A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4)P A 5(A D C 5)P A 6(A D C 6)P A 7(A D C 7)
A R E F
P A 3(A D C 3)
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 ( IC P ) P D 7 (O C 2 )
P A 0(A D C 0)P A 1(A D C 1)P A 2(A D C 2)
A G N DA V C C
P C 7(TO S C 2 )P C 6(TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
J 5
H E A D E R 5
12345
p in b .6
P D 0X1
P D 5
S 1 7
S W
P D 1
C 3 1 0 0 n F 1
p inb . 0
S W 2
12
D 3
1 N 4 0 0 2
AC
S 5
S W
p in b .6
V C C
S 9
S W
P D 7
p in b .7
p in b . 0
J 1 6 .
H E A D E R 1 6
123456789
1 01 11 21 31 41 51 6
P D 1
p in b .6
P D 6
C 2 2 2 p F
P D 4S 1 5
S W
P D 6
p in b .6
S 1 2
S W
p in b .5
S 1 8
S W
P D 5
S 1 6
S W
R S T
P D 2
p inb . 1
P D 7
S 6
S W
p in b .7
p in b .7
p in b . 2
S 1 3
S W
C 1 2 2 p F
P D 3
p in b .7
P D 0
S 10
S W
V C C
p in b .6
p in b .7
S 1 9
S W
p in b .5
R 1
P D 3
V C C
V C C
p in b . 1
R 95 k
V C C
V C C
S 4
S W
S 7
S W
S 1 4
S W
p inb . 2
p in b .4
P D 4
p in b . 5
Gambar 3.5 Rangkaian aplikasi tombol keypad dengan lcd
3.3.4. PEMROGRAMAN PEMBACAAN KEYPAD
Setelah rangkaian tombol 4x4 dibuat dan dihubungkan dengan port pararel
mikrokontroller, maka sekarang saatnya Anda membuat program Program pembacaan
tombol. 4x4.
Program sebagai berikut ini
//------------------------------------------------------//Program KEYPAD LCD//DEKLARASI HEADER//------------------------------------------------------#include <lcd.h>#include <stdio.h>#include <mega16.h>#include <delay.h>//------------------------------------------------------//DEKLARASI PIN LCD
19

//------------------------------------------------------#asm.equ __lcd_port=0x18;PORTB#endasm//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char dt, dtkey;char buf[33];//------------------------------------------------------//DEKLARASI SUB RUTIN KEYPAD//------------------------------------------------------void inkey(void);//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main(){ PORTD = 0XFF; DDRD=0xF0; lcd_init(16); lcd_gotoxy(0,1); lcd_putsf("Hello world"); while(1) { inkey(); lcd_gotoxy(0,1); sprintf(buf,"hex %x ",dtkey); lcd_puts(buf); }}//------------------------------------------------------//SUB RUTIN KEYPAD//------------------------------------------------------void inkey(void){PORTD.4 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x01; break;case 2:dtkey = 0x05; break;case 4:dtkey = 0x09; break;case 8:dtkey = 0x13; break;}PORTD.4 = 1;PORTD.5 = 0;dt = (~PIND & 0x0F);
20

switch (dt){case 1:dtkey = 0x02; break;case 2:dtkey = 0x06; break;case 4:dtkey = 0x10; break;case 8:dtkey = 0x14; break;}PORTD.5 = 1;PORTD.6 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x03; break;case 2:dtkey = 0x07; break;case 4:dtkey = 0x11; break;case 8:dtkey = 0x15; break;}PORTD.6 = 1;PORTD.7 = 0;dt = (~PIND & 0x0F);switch (dt){case 1:dtkey = 0x04; break;case 2:dtkey = 0x08; break;case 4:dtkey = 0x12; break;case 8:dtkey = 0x16; break;}PORTD.7 = 1;}
21

BAB IV ANALOG TO DIGITAL CONVERTER (OK)
4.1. PENDAHULUAN
ATmega16 mempunyai ADC (Analog to Digital Converter) internal dengan fitur sebagai
berikut (untuk lebih detil dapat mengacu pada datasheet) :
� 10-bit Resolution
� 65 - 260 μs Conversion Time
� Up to 15 kSPS at Maximum Resolution
� 8 Multiplexed Single Ended Input Channels
� Optional Left Adjustment for ADC Result Readout
� 0 - VCC ADC Input Voltage Range
� Selectable 2.56V ADC Reference Voltage
� Free Running or Single Conversion Mode ~ ADC Start Conversion by Auto
Triggering on Interrupt 9Ibit ha l 49 Sources
� Interrupt on ADC Conversion Complete
� Sleep Mode Noise Canceler
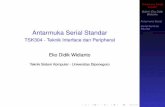
Dibawah ini gambar timing diagram untuk mode single convertion maksudnya hanya satu
input chanel saja yang dikonversi.
Gambar 4. 1 Timing diagram mode single conversion
22

4.2. RANGKAIAN ADC ATMEGA DENGAN LED
Rangkaian minimum untuk membaca ADC dengan tempilan LED ditunjukan pada
Gambar 9.7 yang perlu diperhatikan adalah konfigurasi rangkaian LED yaitu Common Anode
(CA) artinya untuk menghidupkan LED pada Port D, port D harus dikirim atau diberi logika
‘0’.
P 7
G N D
C 1 2 2 p F
S W 2
12
P 7
C 2 2 2 p F
P 3
V C C
R S T
V C C
J I S P
H E A D E R 5
12345
1 2
P 6
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3635343332
37
1
45
9
1 41 5
2 0 21
403938
31302928272625242322
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1B )P D 5 (O C 1A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4)P A 5 (A D C 5)P A 6 (A D C 6)P A 7 (A D C 7)
A R E F
P A 3 (A D C 3)
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0)P A 1 (A D C 1)P A 2 (A D C 2)
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L)
1 21 2
R 1
R S T
C 3 1 0 0 n F 1
P 1
P 5
V C C
P 2
1 2
V C C
L 11 2
1 2
X1
P 6
1 2
1 2
P 4
R 2
P O T
13
2
P 0
P 5
Gambar 4.2 Hasil pemasangan komponen ADC LED
4.3. PEMROGRAMAN ADC ATMEGA16
Setelah rangkaian adc mikrokontroller ATMEGA16 dibuat, maka sekarang saatnya
Anda membuat program yang digunakan untuk membaca ADC ATMEGA16 dan
menampilkan data ADC tersebut dengan menggunakan LED yang terhubung pada PORT D
yang konfigurasi rangkaian LED yaitu Common Anode (CA).
Program sebagai berikut ini
//-------------------------------------------------------//Program ADC LED//-------------------------------------------------------
//-------------------------------------------------------//DEKLARASI HEADER//-------------------------------------------------------#include <mega16.h>#include <stdio.h>#include <delay.h>
//-------------------------------------------------------//DEKLARASI VARIABEL//-------------------------------------------------------unsigned int data_adc;
23

int suhu;
//-------------------------------------------------------//DEFINISI VARIABEL//-------------------------------------------------------#define ADC_VREF_TYPE 0x60
//-------------------------------------------------------//SUB RUTIN ADC//-------------------------------------------------------unsigned char read_adc(unsigned char adc_input){ADMUX=adc_input|ADC_VREF_TYPE;ADCSRA|=0x40;while ((ADCSRA & 0x10)==0);ADCSRA|=0x10;return ADCH;}
//-------------------------------------------------------//RUTIN UTAMA//-------------------------------------------------------void main(void){DDRD = 0xFF;ADMUX=ADC_VREF_TYPE;ADCSRA=0x87;SFIOR&=0xEF;while (1) {
data_adc=read_adc(0); suhu=~data_adc; PORTD = suhu; }}
24

BAB V TIMER / COUNTER (OK)
5.1. PENDAHULUAN
Timer/couter adalah tujuan umum single channel, module 8 bit timer/counter.
Beberapa fasilitas chanel dari timer counter antara lain:
Counter channel tunggal
Pengosongan data timer sesuai dengan data pembanding
Bebas -glitch, tahap yang tepat Pulse Width Modulator (PWM)
Pembangkit frekuensi
Event counter external
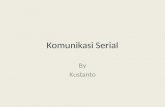
Gambar 5. 1 Blok diagram timer counter
Gambar diagram block timer/counter 8 bit ditunjukan pada gambar di bawah ini.
Untuk penempatan pin I/O telah di jelaskan Ibit hal 67 pada bagian I/O di atas. CPU dapat
diakses register I/O, termasuk dalam pinpin I/O dan bit I/O. Device khusus register I/O dan
lokasi bit terdaftar pada deskripsi timer/counter 8 bit pada gambar 1.13
5.2. TIMING DIAGRAM TIMER/COUNTER
Timer/counter disain sinkron clock timer (clkT0) oleh karena itu ditunjukan
sebagai sinyal enable clock pada gambar berikut. Gambar ini termasuk informasi ketika
flag interrupt dalam kondisi set. Data timing digunakan sebagai dasar dari operasi
timer/counter.
Sesuai dengan gambar dibawah timing diagram timer/counter dengan prescaling
maksudnya adalah counter akan menambahkan data counter (TCNTn) ketika terjadi pulsa
25

clock telah mencapai 8 kali pulsa dan sinyal clock pembagi aktif clock dan ketika telah
mencapai nilai maksimal maka nilai TCNTn akan kembali ke nol. Dan kondisi flag timer
akan aktif ketika TCNTn maksimal.
Gambar 5. 2 Timing diagram timer/counter, tanpa prescaling
Gambar 5. 3 Timing diagram timer/counter, dengan prescaling
Gambar 5. 4 Timing diagram timer/counter, OCFO pescaler (fclk_I/O/8)
26

Sama halnya timing timer diatas, timing timer/counter dengan seting OCFO timer
mode ini memasukan data ORCn sebagai data input timer. Ketika nilai ORCn sama dengan
nilaiTCNTn maka pulsa flag timer akan aktif. TCNTn akan bertambah nilainya ketika
pulsa clock telah mencapai 8 pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi
ketika nilai TCNTn kembali ke nilai 0 (overflow).
Ketika nilai ORCn sama dengan nilai TCNTn maka pulsa flag timer akan aktif.
TCNTn akan bertambah nilainya ketika pulsa clock telah mencapai 8 pulsa. Dan kondisi
flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembalimkenilai 0 (overflow).
Gambar 5. 5 Timing diagram timer/counter, ,dengan pescaler (fclk_I/O/8)
5.3. RANGKAIAN MENCACAH COUNTER TIMER T0
Rangkaian minimum untuk counter melalui Port B.0 ditunjukan pada Gambar 6.2.
Rangkaian tersebut menggunakan penampil led. Konfigurasi rangkaian LED yaitu Common
Anode (CA) artinya untuk menghidupkan LED pada Port D, port D harus dikirim atau diberi
logika ‘0’.
V C C
P 6
P 2
P 7
P 5
P 3
P 1
R 1
L 11 2
P 0
C 3 1 0 0 n F 1
V C C
P 5
P 4
R S T
V C C
1 2
V C C
P 6
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (IN T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M IS O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K /T0 )
P B 3 (O C 0 /A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
C 2 2 2 p F
S W 2
12
P 7R S T
J IS P
H E A D E R 5
12345
X1
1 21 2
1 2
G N D
1 2
1 2
C 1 2 2 p F
1 2
Gambar 5.6 Hasil pemasangan komponen-komponen mencacah counter T0
27

5.4. PEMROGRAMAN MENCACAH COUNTER T0
Setelah rangkaian dibuat dan dihubungkan dengan port mikrokontroller, maka
sekarang saatnya Anda membuat program yang digunakan untuk mencacah. Program cacah
menggunakan port B.0 pada mikrokontroller.
Program sebagai berikut ini
//------------------------------------------------------// Program MENCACAH COUNTER TIMER 0//------------------------------------------------------
//------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char led,a;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiTIMER ();
//------------------------------------------------------//RUTIN UTAMA//------------------------------------------------------void main (void){ DDRD = 0xff; led=0x00; InisialisasiTIMER(); while(1) { a = TCNT0; if (a == 0x06) { led = PIND; PORTD=~led; TCNT0=0x00; } }}
28

//------------------------------------------------------//SUB RUTIN INISIALISASI TIMER0//------------------------------------------------------void InisialisasiTIMER (){ TCNT0=0x00; TCCR0=0x07;}
5.5. PEMROGRAMAN MENCACAH COUNTER T0
Setelah rangkaian dibuat dan dihubungkan dengan port mikrokontroller, maka
sekarang saatnya Anda membuat program yang digunakan untuk mencacah. Program cacah
menggunakan port B.0 pada mikrokontroller.
Program sebagai berikut ini
//------------------------------------------------------// Program MENCACAH COUNTER TIMER 0//------------------------------------------------------
//------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char led,a;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiTIMER ();
//------------------------------------------------------//RUTIN UTAMA//------------------------------------------------------void main (void){ DDRD = 0xff; led=0x00; InisialisasiTIMER(); while(1) { a = TCNT0;
29

if (a == 0x06) { led = PIND; PORTD=~led; TCNT0=0x00; } }}
//------------------------------------------------------//SUB RUTIN INISIALISASI TIMER0//------------------------------------------------------void InisialisasiTIMER (){ TCNT0=0x00; TCCR0=0x07;}
30

BAB VI INTERUPSI (OK)
6.1. PENDAHULUAN
Interupsi adalah suatu kejadian atau peristiwa yang menyebabkan mikrokontroler
berhenti sejenak untuk melayani interupsi tersebut. Program yang dijalankan pada saat
melayani interupsi disebut Interrupt Service Routine. Pada sistem mikrokontroler yang
sedang menjalankan programnya, saat terjadi interupsi , program akan berhenti sesaat,
melayani interupsi tersebut dengan menjalankan program yang berada pada alamat yang
ditunjuk oleh vektor dari interupsi yang terjadi hingga selesai dan kembali meneruskan
program yang terhenti oleh interupsi tadi.
Meskipun memerlukan pengertian yang lebih mendalam, pengetahuan mengenai
interupsi sangat membantu mengatasi masalah pemrograman mikroprosesor / mikrokontroler
dalam hal menangani banyak peralatan input/output. Pengetahuan mengenai interupsi tidak
cukup hanya dibahas secara teori saja, diperlukan contoh program yang konkrit untuk
memahami. ATMEGA16 memiliki 21 buah sumber interupsi. Interupsi tersebut bekerja jika
bit I pada Register status atau Status Register (SREG) dan bit pada masing-masing register
bernilai 1.
Tabel 1. 1Interrupt vektor
31

6.2. RANGKAIAN INTERUPSI EKTERNAL
Rangkaian berikut digunakan untuk interupsi ekternal mikrokontroller. Rangkaian
tersebut menggunakan interupsi eksternal 0, 1, dan 2 yang menggunakan tampilan LED yang
dihubungkan pada Port A.
12
P 6
P 3
12
INT2U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
R S T
C 2 2 2 p F
12
V C C
P 7
R S T
S W 2
12
L 112
J I S P
H E A D E R 5
12345
X1
V C C
P 5
V C C
12R 1
C 3 1 0 0 n F 1
P 5
P 4
P 2
V C C
G N D
INT1
12
V C C
P 6
P 7
C 1 2 2 p F V C C
P 112
P 0
INT0
12
V C C
Gambar 6.1 Rangkaian interupsi ekternal mikrokontroller
6.3. PEMROGRAMAN INTERUPSI EKTERNAL INT0
Setelah membuat rangkaian interupsi ekternal untuk menghidupkan LED, maka
sekarang saatnya Anda membuat program yang digunakan untuk menghidupkan LED dengan
menggunakan interupsi external 0.
Program sebagai berikut ini
//------------------------------------------------------//Program interupsi eksternal 0//------------------------------------------------------
//------------------------------------------------------//EKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
32

//------------------------------------------------------//EKLARASI VARIABEL//------------------------------------------------------unsigned char dt=0x01;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiINT0();
//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main (void){
DDRA=0xff; InisialisasiINT0();#asm ("sei");
while(1) { PORTA=dt; delay_ms(100); dt=dt<<1; if (dt==0) {dt=0x01;} }}
//------------------------------------------------------//SUB RUTIN INTERUPSI EXTERNAL0//------------------------------------------------------interrupt [EXT_INT0] void ext_int0_isr(void){unsigned char rr=0;while (rr<5) { PORTA=0x0f; delay_ms(5); PORTA=0xf0; delay_ms(5); ++rr; }}
//------------------------------------------------------//SUB RUTIN INISIALISASI INTERUPSI EXTERNAL0//------------------------------------------------------void InisialisasiINT0 (){ GICR|=0x80; MCUCR=0x0C; MCUCSR=0x00;
33

GIFR=0x80;}
6.4. PEMROGRAMAN INTERUPSI EKTERNAL INT1
Setelah membuat rangkaian interupsi ekternal int 1, maka sekarang saatnya Anda
membuat program yang digunakan untuk menghidupkan LED dengan menggunakan
interupsi external int1
Program sebagai berikut ini
//------------------------------------------------------//Program interupsi eksternal 1//------------------------------------------------------
//------------------------------------------------------//EKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//EKLARASI VARIABEL//------------------------------------------------------unsigned char dt=0x01;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiINT1();
//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main (void){
DDRA=0xff; InisialisasiINT1();#asm ("sei");
while(1) { PORTA=dt; delay_ms(100); dt=dt<<1; if (dt==0) {dt=0x01;} };}
//------------------------------------------------------
34

//SUB RUTIN INTERUPSI EXTERNAL0//------------------------------------------------------interrupt [EXT_INT1] void ext_int1_isr(void){unsigned char rr=0;while (rr<5) { PORTA=0x0f; delay_ms(5); PORTA=0xf0; delay_ms(5); ++rr; }}
//------------------------------------------------------//SUB RUTIN INISIALISASI INTERUPSI EXTERNAL0//------------------------------------------------------void InisialisasiINT1(){ GICR|=0x80; MCUCR=0x0C; MCUCSR=0x00; GIFR=0x80;}
6.5. RANGKAIAN INTERUPSI TIMER MIKROKONTROLLER
Rangkaian berikut digunakan untuk interupsi ekternal mikrokontroller. Rangkaian
tersebut menggunakan interupsi timer 0 dan 1 yang menggunakan tampilan LED yang
dihubungkan pada Port D.
X1
C 3 1 0 0 n F 1
C 1 2 2 p F
P 4P 3
R S T
P 5
J I S P
H E A D E R 5
12345
C 2 2 2 p F
P 6P 7
1 2
1 2
R 1
1 2
V C CV C C
P 6
1 2
1 2
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
V C C
G N D
P 0
P 2
L 11 2
P 5
1 2
P 1
P 7
R S T
1 2
S W 2
12
Gambar 6.2 Rangkaian interupsi timer mikrokontroller
35

6.6. PEMROGRAMAN INTERUPSI TIMER 0
Setelah membuat rangkaian interupsi timer untuk menghidupkan LED, maka sekarang
saatnya Anda membuat program yang digunakan untuk menghidupkan LED dengan
menggunakan interupsi timer 0.
Program sebagai berikut ini
//------------------------------------------------------// Program INTERUPSI TIMER 0//------------------------------------------------------
//------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char led=0xfe;
//------------------------------------------------------//DEKLARASI SUB RUTIN Inisialisasi TIMER0//------------------------------------------------------void InisialisasiTIMER0();
//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main (void){
DDRD=0xff; InisialisasiTIMER0();#asm ("sei"); while(1);
}
//------------------------------------------------------//SUB RUTIN INTERUPSI TIMER0//------------------------------------------------------interrupt [TIM0_OVF] void timer0_overflow(void){
TCNT0=0x00; led<<=1; led|=1;if (led==0xff) led=0xfe; PORTD=led;
}
//------------------------------------------------------//SUB RUTIN INISIALISASI TIMER0//------------------------------------------------------
36

void InisialisasiTIMER0(){ TCNT0=0x00; TCCR0=0x05; TIMSK=0x01; TIFR=0x01;}
6.7. PEMROGRAMAN INTERUPSI TIMER 1
Setelah membuat rangkaian interupsi timer untuk menghidupkan LED, maka sekarang
saatnya Anda membuat program yang digunakan untuk menghidupkan LED dengan
menggunakan interupsi timer 1.
Program sebagai berikut ini
//------------------------------------------------------// Program INTERUPSI TIMER 1//------------------------------------------------------
//------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char led=0xfe;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiTIMER1();
//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main (void){
DDRD=0xff; InisialisasiTIMER1();#asm ("sei"); while(1);
}
//------------------------------------------------------//SUB RUTIN INTERUPSI TIMER 1//------------------------------------------------------interrupt [TIM1_OVF] void timer1_ovf_isr(void)
37

{ TCNT1L=0x00; TCNT1H=0x00; led<<=1; led|=1; delay_ms(100); if (led==0xff) led=0xfe; PORTD=led;}
//------------------------------------------------------//SUB RUTIN INISIALISASI TIMER 1//------------------------------------------------------void InisialisasiTIMER1(){ TCNT1L=0x00; TCNT1H=0x00; TCCR1A=0x00; TCCR1B=0x01; TIMSK=0x04; TIFR=0x04;}
6.8. PEMROGRAMAN INTERUPSI TIMER 2
Setelah membuat rangkaian interupsi timer untuk menghidupkan LED, maka sekarang
saatnya Anda membuat program yang digunakan untuk menghidupkan LED dengan
menggunakan interupsi timer 2.
Program sebagai berikut ini
//------------------------------------------------------// Program INTERUPSI TIMER 2//------------------------------------------------------
//------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------#include <mega16.h>#include <delay.h>#include <stdio.h>
//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------unsigned char led=0xfe;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiTIMER2();
//------------------------------------------------------//PROGRAM UTAMA
38

//------------------------------------------------------void main (void){
DDRD=0xff; InisialisasiTIMER2();#asm ("sei"); while(1);
}
//------------------------------------------------------//SUB RUTIN INTERUPSI TIMER2//------------------------------------------------------interrupt [TIM2_OVF] void timer2_ovf_isr(void){ TCNT2=0x00; led<<=1; led|=1; delay_ms(100);
if (led==0xff) led=0xfe; PORTD=led;}
//------------------------------------------------------//SUB RUTIN INISIALISASI TIMER2//------------------------------------------------------void InisialisasiTIMER2(){ TCCR2=0x05; TCNT2=0x00; TIMSK=0x40; TIFR=0x40;}
39

BAB VII SERIAL PORT(OK)
7.1. PENDAHULUAN
Universal synchronous dan asynchronous pemancar dan penerima serial adalah suatu
alat komunikasi serial sangat fleksibel. Jenis yang utama adalah :
� Operasi full duplex (register penerima dan pengirim dapat berdiri sendiri )
� Operasi Asychronous atau synchronous
� Master atau slave mendapat clock dengan operasi synchronous
� Pembangkit boud rate dengan resolusi tinggi
� Dukung frames serial dengan 5, 6, 7, 8 atau 9 Data bit dan 1 atau 2 Stop bit
� Tahap odd atau even parity dan parity check didukung oleh hardware
� Pendeteksian data overrun
� Pendeteksi framing error
� Pemfilteran gangguan ( noise ) meliputi pendeteksian bit false start dan pendeteksian
low pass filter digital
� Tiga interrupt yaitu TX complete, TX data register empty dan RX complete.
� Mode komunikasi multi-processor
� Mode komunikasi double speed asynchronous
7.2. INISIALISASI USART
USART harus diinisialisasi sebelum komunikasi manapun dapat berlansung. Proses
inisialisasi normalnyaterdiri daripengesetan boud rate, penyetingan frame format dan
pengaktifan pengirim atau penerimatergantung pada pemakaian. Untuk interrupt
menjalankan operasi USART , global interrupt flag ( penanda ) sebaiknya dibersihkan ( dan
interrupt global disable ) ketika inisialisasi dilakukan. Sebelum melakukan inisialisasi ulang
dengan mengubah boud rate atau frame format, untuk meyakinkan bahwa tidak ada
transmisi berkelanjutan sepanjang peiode register yang diubah.
Flag TXC dapat digunakan untuk mengecek bahwa pemancar telah melengkapi
semua pengiriman, dan flag RXC dapat digunakan untuk mengecek bahwa tidak ada data
yang tidak terbaca pada buffer penerima. Tercatat bahwa flag TXC harus dibersihkan
sebelum tiap transmisi ( sebelum UDR ditulisi ) jika itu semua digunakan untuk tujuan
tersebut. USART sederhana inisialisasi kode contoh berikut menunjukan fungsi satu
assembly dan satu C itu mempunyai kesamaan dalam kemampuan. Pada contoh tersebit
40

mengasumsikan bahwa operasi asinkron menggunakan metode poling ( tidak ada interrupt
enable ) frame format yang tetap. Boud rate diberikan sebagai fungsi parameter.
Untuk kode assembly, parameter boud rate diasumsikan untuk di simpan pada
register r16, r17. Ketika menulis fungsi pada register UCSRC, bit URSEL (MSB) harus
diset dalam kaitan dengan pembagian penempatan I/O oleh UBRRH dan UCSRC. Lebih
mengedepankan inisialisasi rutin dapat dibuat seperti itu meliputi frame format sebagai
parameter, disable interrupt dan lain-lain. Bagai manapun juga banyak aplikasi
menggunakan seting tetap boud dan register control, dan untuk aplikasi jenis ini dapat
ditempatkan secara langsung pada keseluruhan routine, atau dikombinasikan dengan
inisialisasi kode untuk modul I/O yang lain.
7.3. RANGKAIAN SERIAL MIKROKONTROLLER
Rangkaian berikut digunakan untuk interfacing Led dengan port serial. Rangkaian
tersebut, sebagai konverter dari serial ke pararel. Berikut adalah rangkaian serial led driver
yang akan kita hubungkan pada port serial. Rangkaian Led Driver Serial menggunakan
Microcontroller ATMEGA16 yang dihubungkan ke port serial dengan menggunakan IC
RS232 Rangkaian Serial LED Driver ini akan mendeteksi setiap pengiriman data karakter
dari port serial computer.
U 4
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
A D D 9
P 3
G N D
A D D 8
P 712
P D 5
V C C
P 5
D A TA 5
A D D 1 2
L 112
P D 6
+ C 4
1 u F 1 6 V
12D A TA 2
P 6
TX1
R S T
R X1
P 4
S W 2
12
+
C 91 u F 1 6 V
V C C
12
P D 1X1
D A TA 4
J I S P
H E A D E R 5
12345
U 6
M A X2 3 2
1 38 1 1
1 0
1
3
4
5
2 6
1 2
91 47 R 1 I N
R 2 I N T1 IN
T2 IN
C +
C 1 -
C 2 +
C 2 -
V + V -
R 1 O U T
R 2 O U TT1 O U TT2 O U T
D A TA 7
D A TA 3
P 7
+ C 8
1 u F 1 6 V
12
C 1 2 2 p F
D A TA 0P 1
V C C
P 5
V C CP 2P 6
P D 7
A D D 1 1
C 2 2 2 p F
D A TA 1
P D 3
+ C 5
1 u F 1 6 V
D A TA 6
C 3 1 0 0 n F 1
12
P 0
P D 0
R S T
A D D 1 0
A D D 1 5
12
P D 2
J S e r ia l1
H E A D E R 3
123
A D D 1 3P D 4 A D D 1 4
12R 1
Gambar 7. 1 Hasil pemasangan komponen rangkaian serial mikrokontroller
41

7.4. PEMROGRAMAN PORT SERIAL MIKROKONTROLLER
Setelah membuat dan menjalankan program mengirim data serial, maka sekarang
saatnya Anda membuat program kedua yang digunakan untuk program mengirim dan
menerima data serial.
Program sebagai berikut ini
//-------------------------------------------------------//Program Bab 5.2. MENGIRIM DAN MENERIMA DATA//-------------------------------------------------------
//-------------------------------------------------------//DEKLARASI HEADER//------------------------------------------------------- #include <mega16.h>#include <delay.h>#include <stdio.h>
//-------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------- unsigned char data_terima = 0x00;const long int osilator = 12000000;unsigned long int UBRR;
//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiUSART (unsigned long int baud_rate);
//------------------------------------------------------//PROGRAM UTAMA//------------------------------------------------------void main(void){DDRC = 0xFF;PORTC = 0x00;InisialisasiUSART(9600);putsf("Selamat Datang Mas Iswanto"); putchar(13);while(1) { putsf("Tekan sembarang tombol"); putchar(13); data_terima = getchar(); delay_ms(100); putsf("Anda menekan tombol "); putchar(data_terima);; putchar(13); }}
42

//------------------------------------------------------//SUB RUTIN BAUDRATE//------------------------------------------------------void InisialisasiUSART (unsigned long int baud_rate){UBRR = (osilator/(16*baud_rate))-1;UBRRL = UBRR;UBRRH = UBRR>>8;UCSRB = 0x18;UCSRC = 0x86;}
43

BAB VIII PWM(OK)
8.1. PENDAHULUAN
PWM (Pulse Width Modulation) dapat digunakan untuk mengatur kecepatan motor,
yaitu dengan cara mengatur lebar pulsa (waktu ON) dari tegangan sumbernya (tegangan DC).
Perbandingan antara waktu ON dan waktu OFF disebut duty cycle (siklus kerja). Semakin
besar siklus kerjanya, akan semakin besar pula keluaran yang dihasilkan, sehingga kecepatan
motor akan semakin besar. Pembangkitan sinyal PWM dengan mikrokontroler memiliki
beberapa keuntungan, seperti teknik pemrograman yang sederhana, dan rangkaian listrik
menjadi sederhana.
Mikrokontroler AVR ATMEGA16 dapat digunakan sebagai pembangkit gelombang
PWM. Mikrokontroler AVR ATMEGA16 mempunyai PWM yang telah terintegrasi dalam
chip. Keluaran dari PWM tersebut terdapat pada pin 15 (OC1). Untuk menjalankan program
PWM, diperlukan 3 unit register timer, yaitu:
a. Timer/Counter Control Register (TCCR), untuk menentukan mode PWM.
b. Timer/Counter Register (TCNT), digunakan untuk menentukan modulasi
frekuensinya.
c. Output Compare Register (OCR), untuk menentukan nilai siklus kerjanya.
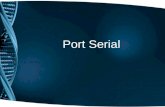
Dalam mikrokontroler ATMEGA16, terdapat beberapa mode PWM. Mode PWM yang
akan dibahas adalah mode Fast PWM, karena dalam perancangan sistem robot ini
menggunakan mode Fast PWM. Pada mode Fast PWM, semakin besar nilai OCR, maka
akan semakin besar pula siklus kerja yang dihasilkan. Keluaran PWM akan berlogika tinggi
setelah nilai TOP tercapai sampai nilai OCR tercapai dan kemudian akan berlogika rendah
sampai nilai TOP tercapai kembali. Prinsip kerja dari Fast PWM dapat dilihat pada Gambar
10.1.
nilai counter nilai OCR TOP
Keluaran
Gambar 8.1 Prinsip Kerja Mode Fast PWM
Untuk menghitung siklus kerja digunakan rumus:
44

D= OCR
1+TOPx 100 %
........................................10.1
Untuk menentukan frekuensi PWM dihitung dengan rumus:
f PWM=
f clock
N (1+TOP) ..........................................10.2
Sedangkan untuk menentukan resolusi PWM digunakan rumus:
.................................10.3
keterangan:
N adalah faktor prescaler (1, 8, 64, 256, atau 1024), dan
TOP adalah nilai tertinggi dari pengaturan counter.
8.2. RANGKAIAN PWM MIKROKONTROLLER
Rangkaian minimum untuk pwm melalui Port D.4 dan Port D.5 ditunjukan pada
Gambar 10.2. Rangkaian tersebut menggunakan diver motor dc yaitu transistor. Rangkaian
driver tersebut akan di hubungkan dengan pin D.4 dan pin D.5.
U 1
A TM E G A 1 6
3
1 21 3
2
1 61 71 81 9
1 11 0
876
3 63 53 43 33 2
3 7
1
45
9
1 41 5
2 0 2 1
4 03 93 8
3 13 02 92 82 72 62 52 42 32 2
P B 2 (I N T2 / A I N 0 )
XTA L 2XTA L 1
P B 1 (T1 )
P D 2 (I N T0 )P D 3 (I N T1 )P D 4 (O C 1 B )P D 5 (O C 1 A )
G N DV C C
P B 7 [ S C K )P B 6 [ M I S O )P B 5 (M O S I )
P A 4 (A D C 4 )P A 5 (A D C 5 )P A 6 (A D C 6 )P A 7 (A D C 7 )
A R E F
P A 3 (A D C 3 )
P B 0 (XC K / T0 )
P B 3 (O C 0 / A I N 1 )P B 4 (S S )
R E S E T
P D 0 (R XD )P D 1 (TXD )
P D 6 (I C P ) P D 7 (O C 2 )
P A 0 (A D C 0 )P A 1 (A D C 1 )P A 2 (A D C 2 )
A G N DA V C C
P C 7 (TO S C 2 )P C 6 (TO S C 1 )
P C 5P C 4P C 3P C 2
P C 1 (S D A )P C 0 (S C L )
p in b . 7
1 2 V 2M G 2
M O TO R D C
12
R S T
4 7 0
Q 2TI 9 0 1 3
C 3 1 0 0 n F 1
p in b . 6
C 2 2 2 p F
5 V
TI 9 0 1 3
E N 2
4 7 0
E N 2E N 2
5 V
M G 2
M O TO R D C
12
p in b . 5
S W 2
12
E N 2
TI P 3 0 5 5
D 2
D I O D E
E N 2
E N 2
D 1
D I O D E
C 1 2 2 p F
R S T
E N 2
1 2 V 2
X1
E N 2
TI P 3 0 5 5
E N 2
J I S P
12345
E N 2
R 1
5 V
p in b . 6p in b . 7
p in b . 5
Gambar 8.2 Hasil pemasangan komponen rangkaian minimum untuk pwm
45
RPWM=log(TOP+1)log 2

8.3. PEMROGRAMAN PWM MIKROKONTROLLER
Setelah rangkaian dibuat dan dihubungkan dengan port mikrokontroller, maka
sekarang saatnya Anda membuat program yang digunakan untuk mengatur putaran motor dc.
Program sebagai berikut ini
//-------------------------------------------------------// Program PWM// DEKLARASI HEADER//-------------------------------------------------------#include <stdio.h>#include <mega16.h>#include <delay.h>//------------------------------------------------------//DEKLARASI SUB RUTIN//------------------------------------------------------void InisialisasiPWM();//------------------------------------------------------//DEKLARASI VARIABEL//------------------------------------------------------int data1;int data2;//------------------------------------------------------//RUTIN UTAMA//------------------------------------------------------void main (void){InisialisasiPWM();while(1) { data1 = 50; data2 = 1024; OCR1A=data1; OCR1B=data2; TIFR=0; }}//------------------------------------------------------//SUB RUTIN INISIALISASI PWM//------------------------------------------------------void InisialisasiPWM(){DDRD=0xff;TCCR1A=0xa3;TCCR1B=0x0b;TCNT1=0x0000;}
46