Control de carga para el generador de una turbina … · repentinas y con cambios de dirección...
19
Control de carga para el generador de una turbina eólica por lógica difusa adaptiva Víctor Sotelo Neyra Fabricio Paredes Larroca
Transcript of Control de carga para el generador de una turbina … · repentinas y con cambios de dirección...
Control de carga para el generador de una turbina eólica
por lógica difusa adaptiva
Víctor Sotelo Neyra Fabricio Paredes Larroca

CONTROL DE CARGA
PARA EL GENERADOR
DE UNA TURBINA EÓLICA
POR LÓGICA DIFUSA ADAPTIVA
Primera edición
Enero, 2012
Lima - Perú
© Víctor Sotelo Neyra &Fabricio Paredes Larroca
PROYECTO LIBRO DIGITAL
PLD 0460
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlopstertwitter.com/guzlopster428 4071 - 999 921 348Lima - Perú
PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• E l pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos
de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor
CONTROL DE CARGA PARA EL GENERADOR DE UNA TURBINA EÓLICA POR LÓGICA DIFUSA ADAPTIVA
MSc. Víctor Sotelo Neyra, Ing. Fabricio Paredes Larroca
[email protected] [email protected]
Instituto de Investigación Científica IDIC Universidad de Lima
RESUMEN
El presente trabajo de investigación pertenece a la rama de generación eléctrica por aprovechamiento de los recursos naturales renovables. Tiene como objetivo el diseño y construcción de un controlador electrónico de potencia, para la administración de un generador de inducción de 1.8kW, de acuerdo a las condiciones de viento y las características propias de la turbina. La finalidad del proyecto de investigación es la construcción del sistema de generación para una turbina eólica económica, adecuada para las necesidades básicas de una familia que se encuentre ubicada en comunidades aisladas de la red eléctrica interconectada, aprovechar la energía generada para su consumo, incentivar el uso de las energías renovables y disminuir la contaminación del medio ambiente. En el diseño se utiliza una técnica moderna de lógica difusa adaptativa para controlar el torque electromagnético y extraer la máxima potencia. La estructura de la lógica difusa es variable y trabaja gracias al conocimiento previo de las condiciones de energía aprovechable a distintos pares producidos por los álabes de la turbina, en los diferentes regímenes de operación a diferentes velocidades. La lógica difusa trabaja en cascada con un controlador de campo orientado FOC para el manejo del torque óptimo de la turbina-generador. Dentro de los aportes del proyecto se propone que en la solución de las funciones de pertenencia de la lógica difusa se deben utilizar solamente números enteros, optimizando de esa manera el tiempo de cálculo del procesador, además las funciones se reemplazan por constantes en rangos de muestreo en un proceso similar al de una digitalización, permitiendo cualquier función discreta y en vez de realizar cálculos en coma flotante para obtener los grados de pertenencia se busca la solución por indexación del valor
que entra como dato a la etapa de fuzzificación dentro de una tabla en un vector de memoria, de manera que el valor del dato viene a ser el desplazamiento con respecto al inicio del vector y el resultado sale por simple lectura de la memoria con ese desplazamiento. De la misma manera el cambio de función de pertenencia debido a la adaptabilidad de la lógica es por un simple desfase hacia un nuevo vector ubicado en otra parte de la memoria del DSP. El generador es un motor de inducción AC del tipo SQIG, generador de inducción de jaula de ardilla, trabajando con deslizamiento negativo, de manera que se reducen los costos al ser muy económico. En la construcción del sistema de generación se incluye un convertidor total, donde un módulo de IGBTs maneja la entrega de la potencia reactiva para la auto-excitación del generador en base a un bus DC y recibe a cambio la potencia activa para la carga de baterías. El otro módulo de IGBTs trabaja como inversor para poder entregar la corriente de salida directamente al hogar. El procesador utilizado es un DSP TMS320F28335 de TI, el cuál opera como host del sistema, controla las llaves de dos módulos de IGBTs con aislamiento opto-electrónico, así como también realiza las operaciones de lectura de sensores, mandos de potencia, frenos y accionamiento de relés. Por cuestiones prácticas de investigación el generador es conectado a un motor controlado por un variador de velocidad que emula los pares y velocidades producidos para un cierto ángulo de paso. Dentro de las principales tareas del controlador se encuentra maximizar la captura de energía, evitar las sobrecargas mecánicas en los álabes y partes móviles, además de prestar una buena calidad de energía eléctrica a la salida del sistema.
1. INTRODUCCIÓN Uno de los principales problemas de control en las turbinas eólicas de baja potencia, es la dificultad para encontrar un modelo matemático que represente al sistema en todos sus puntos de operación, si bien se pueden probar simulaciones de los componentes, así como probar el hardware y el proceso en sí, cuando se instalan las turbinas en el campo la variación de las condiciones de viento pueden generar inestabilidad, maltrato a los álabes, fallas en la transmisión ó una generación eléctrica insuficiente entre otros problemas, sobre todo cuando se tiene ráfagas de vientos repentinas y con cambios de dirección aleatorios. Las estrategias de control por lógica difusa pueden ser una alternativa para la solución a dichas condiciones de variación del viento, donde además hay que resolver el problema de ir entregando energía a los usuarios ó ir cargando las baterías. La lógica difusa en este caso debe ser capaz de adaptarse a los diferentes cambios, modificando sus parámetros, bajo la premisa de extraer lo máximo de energía que se pueda de la turbina, sin perjuicio de sus partes mecánicas. Si bien las estrategias de lógica difusa dependen de la base del conocimiento y son fáciles de implementar en un procesador digital, en este trabajo se trata de mejorar dicha base del conocimiento con la adaptabilidad de los parámetros, de manera que de la experiencia se pase también al aprendizaje, eso quiere decir que las funciones de pertenencia de la fuzzificación y defuzzificación deben poder aprender cómo adaptar sus parámetros para mejorar su trabajo.
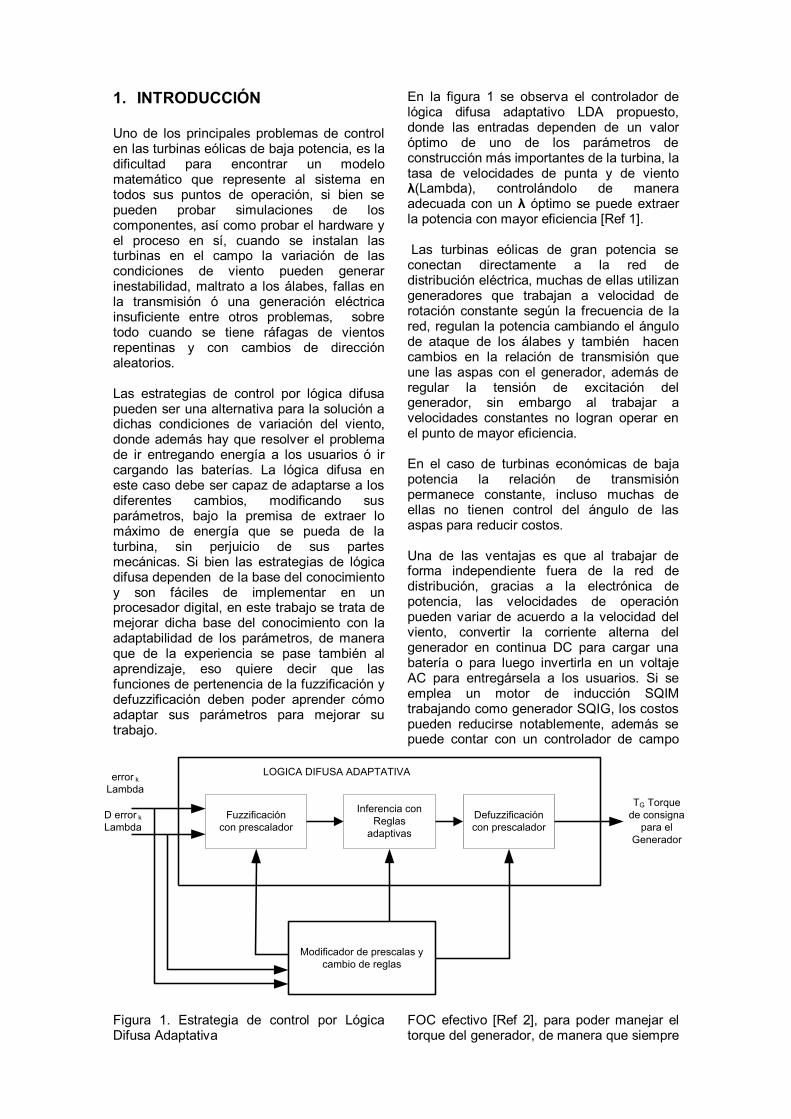
Figura 1. Estrategia de control por Lógica Difusa Adaptativa
En la figura 1 se observa el controlador de lógica difusa adaptativo LDA propuesto, donde las entradas dependen de un valor óptimo de uno de los parámetros de construcción más importantes de la turbina, la tasa de velocidades de punta y de viento λ(Lambda), controlándolo de manera adecuada con un λ óptimo se puede extraer la potencia con mayor eficiencia [Ref 1]. Las turbinas eólicas de gran potencia se conectan directamente a la red de distribución eléctrica, muchas de ellas utilizan generadores que trabajan a velocidad de rotación constante según la frecuencia de la red, regulan la potencia cambiando el ángulo de ataque de los álabes y también hacen cambios en la relación de transmisión que une las aspas con el generador, además de regular la tensión de excitación del generador, sin embargo al trabajar a velocidades constantes no logran operar en el punto de mayor eficiencia. En el caso de turbinas económicas de baja potencia la relación de transmisión permanece constante, incluso muchas de ellas no tienen control del ángulo de las aspas para reducir costos. Una de las ventajas es que al trabajar de forma independiente fuera de la red de distribución, gracias a la electrónica de potencia, las velocidades de operación pueden variar de acuerdo a la velocidad del viento, convertir la corriente alterna del generador en continua DC para cargar una batería o para luego invertirla en un voltaje AC para entregársela a los usuarios. Si se emplea un motor de inducción SQIM trabajando como generador SQIG, los costos pueden reducirse notablemente, además se puede contar con un controlador de campo
FOC efectivo [Ref 2], para poder manejar el torque del generador, de manera que siempre
Fuzzificacióncon prescalador
Inferencia con Reglas
adaptivas
Defuzzificación con prescalador
Modificador de prescalas y cambio de reglas
error k Lambda
D error k Lambda
TG Torquede consigna
para elGenerador
LOGICA DIFUSA ADAPTATIVA
se pueda aprovechar el punto de mayor eficiencia de la turbina, por ello se utiliza un DSP que tenga especialización en el manejo de motores-generadores. En el mercado se encuentra una gran variedad de DSP, la mayoría cuenta con señales de PWM para el disparo de los módulos de potencia, comunicaciones, lectura de sensores, convertidores ADC para la lectura de voltajes y corrientes, así como una especialización en el procesamiento de ecuaciones diferencia basadas en el dominio de la muestra k (las ecuaciones diferenciales son basadas en el dominio del tiempo t). 2. PLANTEAMIENTO DEL PROBLEMA Las turbinas eólicas entregan una potencia variable de acuerdo a las condiciones de viento en la zona de la instalación, las principales variantes son la velocidad del viento, la dirección y las ráfagas que son impredecibles. Se definen tres regiones de operación según la velocidad del viento; el arranque a menos de 5 m/s, la región de operación a velocidades entre los 5-14 m/s y la región de pérdida a velocidades mayores a los 14 m/s. La turbina propuesta es de baja potencia, menor a 1.5 kW, Se busca que sea económica por lo que tiene una relación de transmisión constante con caja elevadora hecha en base a engranajes helicoidales. El generador también debe ser económico y debe poder trabajar en las condiciones propuestas. La energía se va a producir según las diferentes condiciones de viento por ende a diferentes velocidades de rotación. La energía debe ser almacenada en baterías y a su vez debe contar con un inversor para entregar tensión eléctrica AC a los usuarios. El modelo matemático de una turbina eólica dificulta encontrar una buena estrategia de control, de manera que se debe buscar una estrategia basada en la inteligencia y en el conocimiento. La potencia generada por la turbina según la ecuación A.1 es proporcional al cubo de la velocidad del viento, así como al coeficiente de potencia CP que es un valor dependiente de λ que es la tasa de velocidad de la punta del aspa con respecto a la velocidad del viento. La dependencia de este factor está de acuerdo a la construcción de la turbina, la curva para la turbina de 1.5kW es
aproximada a la que se ve en la figura A.1. La potencia por lo tanto tiene un punto óptimo de operación cuando λ es aproximadamente igual a 7. λ opt=7. Entonces el torque de la turbina TT también tiene un valor óptimo de operación que según la ecuación A.1 también es dependiente de λ, por ello el controlador del generador debería obligar al sistema a trabajar en el punto donde la energía es mejor aprovechada, es decir a λ opt=7.[Ref 3] 3. PROPUESTA DE SOLUCIÓN
Se propone una lógica difusa adaptativa (LDA) para controlar la tasa de velocidad de punta λ, de manera que converja al valor de λopt, La LDA no va a requerir del conocimiento riguroso del modelo matemático de la turbina, pero sí de que el sistema sea observable para poder establecer la modificación de los parámetros de las funciones de pertenencia y escoger las reglas adecuadas por observación. La salida de la LDA entregará el valor de corrección para el cambio en el torque del generador ΔTG, de manera que siga la trayectoria donde la turbina entrega la potencia máxima. Ante cambios de viento, se establecerá el transitorio donde el λ no coincidirá con el λopt y el controlador de LDA trabajará en cascada con el controlador TFOC, de modo que le entregará la consigna para lograr la convergencia al torque óptimo Topt. [Ref 4]. El controlador de torque por cambio orientado TFOC está explicado en el Anexo B, siendo esta una técnica conocida para el control de motores y generadores de inducción. 4. CONTROL DE LÓGICA DIFUSA
ADAPTATIVA Las entradas a la etapa de inferencia serán el error en la muestra k de la diferencia entre la tasa de velocidad de la punta óptima y la tasa de velocidad de la punta actual:
(1)
Y la variación del error:
(2) Las funciones de pertenencia para la etapa de fuzzificación y las funciones de salida del defuzzificador tienen las mismas características de rango en la base de sus
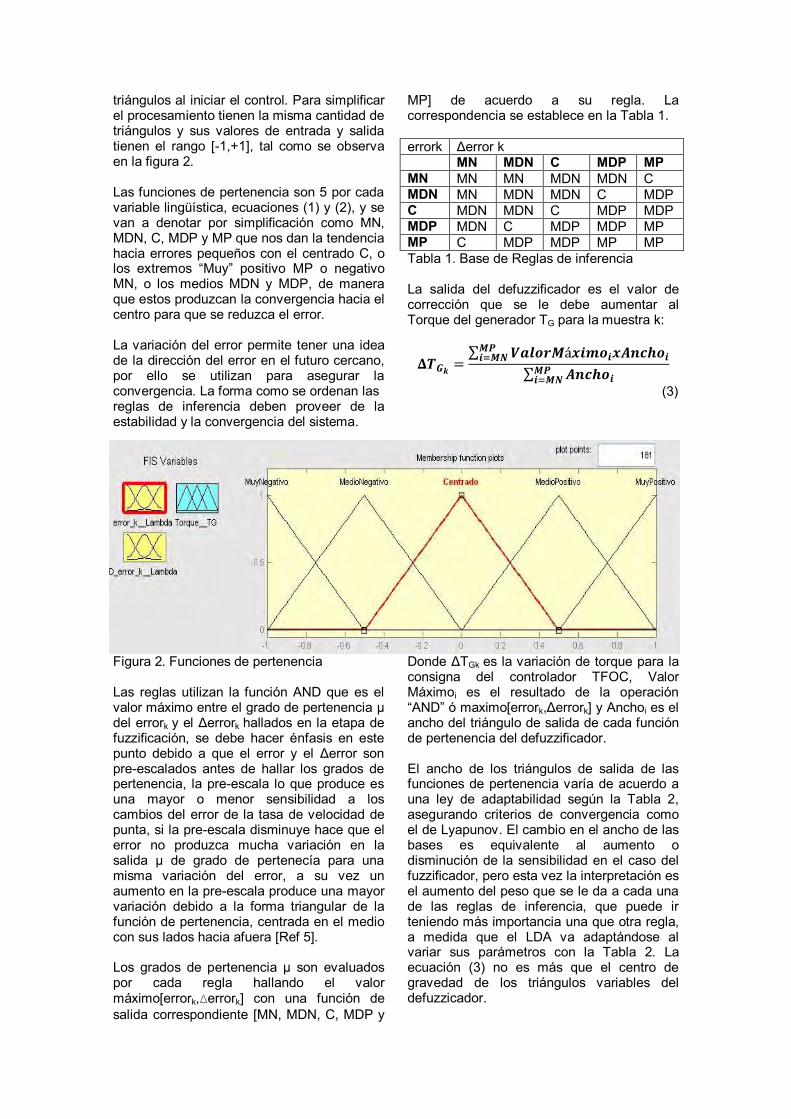
triángulos al iniciar el control. Para simplificar el procesamiento tienen la misma cantidad de triángulos y sus valores de entrada y salida tienen el rango [-1,+1], tal como se observa en la figura 2. Las funciones de pertenencia son 5 por cada variable lingüística, ecuaciones (1) y (2), y se van a denotar por simplificación como MN, MDN, C, MDP y MP que nos dan la tendencia hacia errores pequeños con el centrado C, o los extremos “Muy” positivo MP o negativo MN, o los medios MDN y MDP, de manera que estos produzcan la convergencia hacia el centro para que se reduzca el error. La variación del error permite tener una idea de la dirección del error en el futuro cercano, por ello se utilizan para asegurar la convergencia. La forma como se ordenan las reglas de inferencia deben proveer de la estabilidad y la convergencia del sistema.
Figura 2. Funciones de pertenencia Las reglas utilizan la función AND que es el valor máximo entre el grado de pertenencia µ del errork y el Δerrork hallados en la etapa de fuzzificación, se debe hacer énfasis en este punto debido a que el error y el Δerror son pre-escalados antes de hallar los grados de pertenencia, la pre-escala lo que produce es una mayor o menor sensibilidad a los cambios del error de la tasa de velocidad de punta, si la pre-escala disminuye hace que el error no produzca mucha variación en la salida µ de grado de pertenecía para una misma variación del error, a su vez un aumento en la pre-escala produce una mayor variación debido a la forma triangular de la función de pertenencia, centrada en el medio con sus lados hacia afuera [Ref 5]. Los grados de pertenencia µ son evaluados por cada regla hallando el valor máximo[errork,∆errork] con una función de salida correspondiente [MN, MDN, C, MDP y
MP] de acuerdo a su regla. La correspondencia se establece en la Tabla 1. errork Δerror k MN MDN C MDP MP MN MN MN MDN MDN C MDN MN MDN MDN C MDP C MDN MDN C MDP MDP MDP MDN C MDP MDP MP MP C MDP MDP MP MP Tabla 1. Base de Reglas de inferencia La salida del defuzzificador es el valor de corrección que se le debe aumentar al Torque del generador TG para la muestra k:
(3)
Donde ΔTGk es la variación de torque para la consigna del controlador TFOC, Valor Máximoi es el resultado de la operación “AND” ó maximo[errork,Δerrork] y Anchoi es el ancho del triángulo de salida de cada función de pertenencia del defuzzificador. El ancho de los triángulos de salida de las funciones de pertenencia varía de acuerdo a una ley de adaptabilidad según la Tabla 2, asegurando criterios de convergencia como el de Lyapunov. El cambio en el ancho de las bases es equivalente al aumento o disminución de la sensibilidad en el caso del fuzzificador, pero esta vez la interpretación es el aumento del peso que se le da a cada una de las reglas de inferencia, que puede ir teniendo más importancia una que otra regla, a medida que el LDA va adaptándose al variar sus parámetros con la Tabla 2. La ecuación (3) no es más que el centro de gravedad de los triángulos variables del defuzzicador.
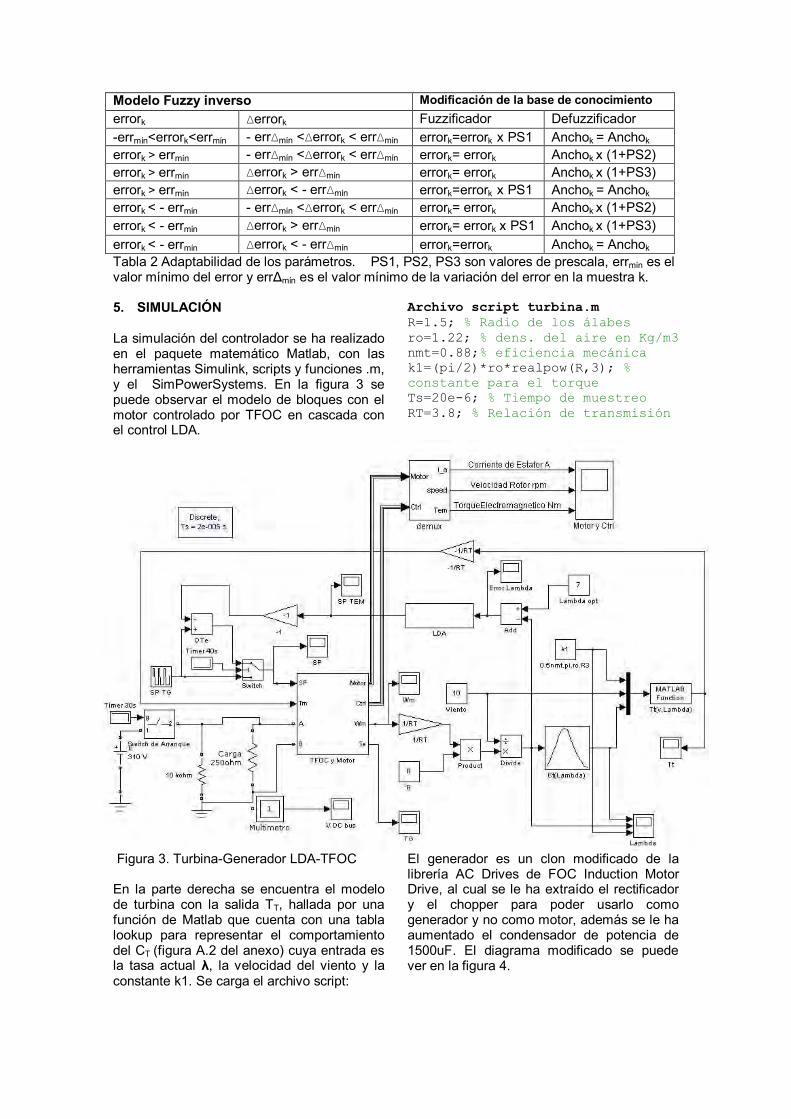
Modelo Fuzzy inverso Modificación de la base de conocimiento errork ∆errork Fuzzificador Defuzzificador -errmín<errork<errmín - err∆mín <∆errork < err∆mín errork=errork x PS1 Anchok = Anchok errork > errmín - err∆mín <∆errork < err∆mín errork= errork Anchok x (1+PS2) errork > errmín ∆errork > err∆mín errork= errork Anchok x (1+PS3) errork > errmín ∆errork < - err∆mín errork=errork x PS1 Anchok = Anchok errork < - errmín - err∆mín <∆errork < err∆mín errork= errork Anchok x (1+PS2) errork < - errmín ∆errork > err∆mín errork= errork x PS1 Anchok x (1+PS3) errork < - errmín ∆errork < - err∆mín errork=errork Anchok = Anchok Tabla 2 Adaptabilidad de los parámetros. PS1, PS2, PS3 son valores de prescala, errmín es el valor mínimo del error y errΔmín es el valor mínimo de la variación del error en la muestra k. 5. SIMULACIÓN La simulación del controlador se ha realizado en el paquete matemático Matlab, con las herramientas Simulink, scripts y funciones .m, y el SimPowerSystems. En la figura 3 se puede observar el modelo de bloques con el motor controlado por TFOC en cascada con el control LDA.
Figura 3. Turbina-Generador LDA-TFOC En la parte derecha se encuentra el modelo de turbina con la salida TT, hallada por una función de Matlab que cuenta con una tabla lookup para representar el comportamiento del CT (figura A.2 del anexo) cuya entrada es la tasa actual λ, la velocidad del viento y la constante k1. Se carga el archivo script:
Archivo script turbina.m
R=1.5; % Radio de los álabes ro=1.22; % dens. del aire en Kg/m3 nmt=0.88;% eficiencia mecánica
k1=(pi/2)*ro*realpow(R,3); %
constante para el torque Ts=20e-6; % Tiempo de muestreo
RT=3.8; % Relación de transmisión
El generador es un clon modificado de la librería AC Drives de FOC Induction Motor Drive, al cual se le ha extraído el rectificador y el chopper para poder usarlo como generador y no como motor, además se le ha aumentado el condensador de potencia de 1500uF. El diagrama modificado se puede ver en la figura 4.
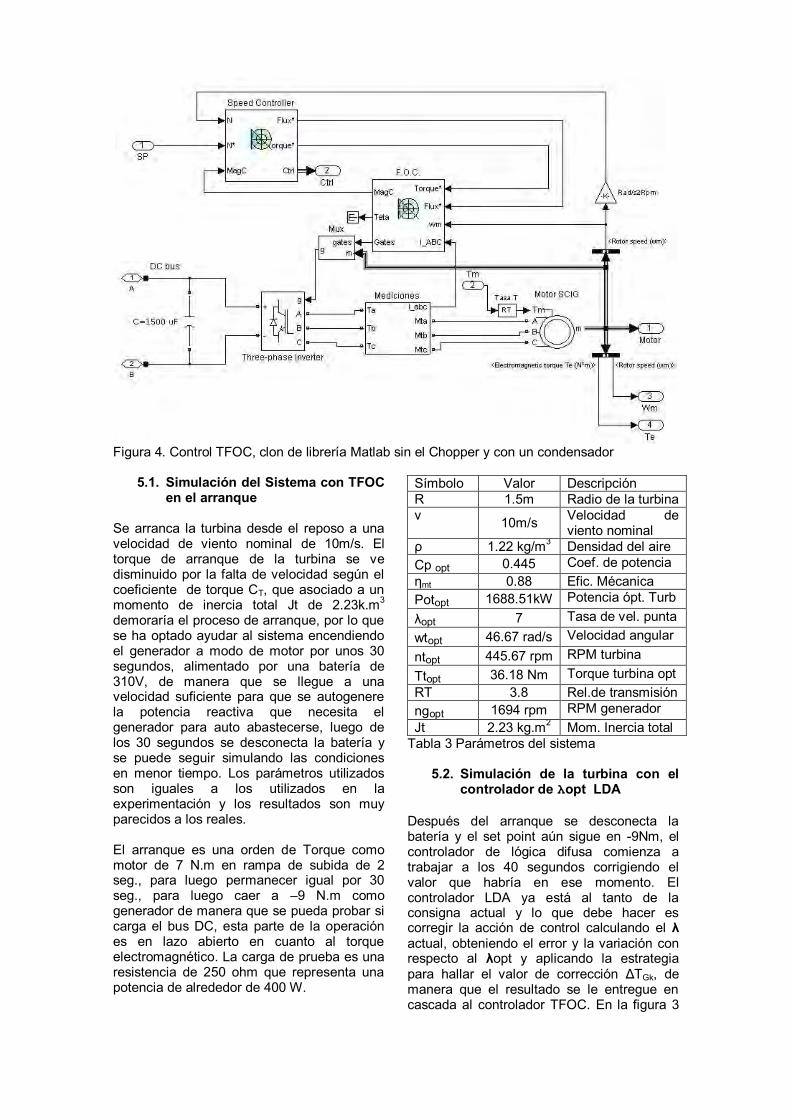
Figura 4. Control TFOC, clon de librería Matlab sin el Chopper y con un condensador
5.1. Simulación del Sistema con TFOC en el arranque
Se arranca la turbina desde el reposo a una velocidad de viento nominal de 10m/s. El torque de arranque de la turbina se ve disminuido por la falta de velocidad según el coeficiente de torque CT, que asociado a un momento de inercia total Jt de 2.23k.m3 demoraría el proceso de arranque, por lo que se ha optado ayudar al sistema encendiendo el generador a modo de motor por unos 30 segundos, alimentado por una batería de 310V, de manera que se llegue a una velocidad suficiente para que se autogenere la potencia reactiva que necesita el generador para auto abastecerse, luego de los 30 segundos se desconecta la batería y se puede seguir simulando las condiciones en menor tiempo. Los parámetros utilizados son iguales a los utilizados en la experimentación y los resultados son muy parecidos a los reales. El arranque es una orden de Torque como motor de 7 N.m en rampa de subida de 2 seg., para luego permanecer igual por 30 seg., para luego caer a –9 N.m como generador de manera que se pueda probar si carga el bus DC, esta parte de la operación es en lazo abierto en cuanto al torque electromagnético. La carga de prueba es una resistencia de 250 ohm que representa una potencia de alrededor de 400 W.
Símbolo Valor Descripción R 1.5m Radio de la turbina v 10m/s Velocidad de
viento nominal ρ 1.22 kg/m3 Densidad del aire Cp opt 0.445 Coef. de potencia ηmt 0.88 Efic. Mécanica Potopt 1688.51kW Potencia ópt. Turb λopt 7 Tasa de vel. punta wtopt 46.67 rad/s Velocidad angular ntopt 445.67 rpm RPM turbina Ttopt 36.18 Nm Torque turbina opt RT 3.8 Rel.de transmisión ngopt 1694 rpm RPM generador Jt 2.23 kg.m2 Mom. Inercia total
Tabla 3 Parámetros del sistema
5.2. Simulación de la turbina con el controlador de λopt LDA
Después del arranque se desconecta la batería y el set point aún sigue en -9Nm, el controlador de lógica difusa comienza a trabajar a los 40 segundos corrigiendo el valor que habría en ese momento. El controlador LDA ya está al tanto de la consigna actual y lo que debe hacer es corregir la acción de control calculando el λ actual, obteniendo el error y la variación con respecto al λopt y aplicando la estrategia para hallar el valor de corrección ΔTGk, de manera que el resultado se le entregue en cascada al controlador TFOC. En la figura 3
hay un restador con el identificador DTe que es el punto de cambio del set point en lazo abierto a lazo cerrado con el LDA.
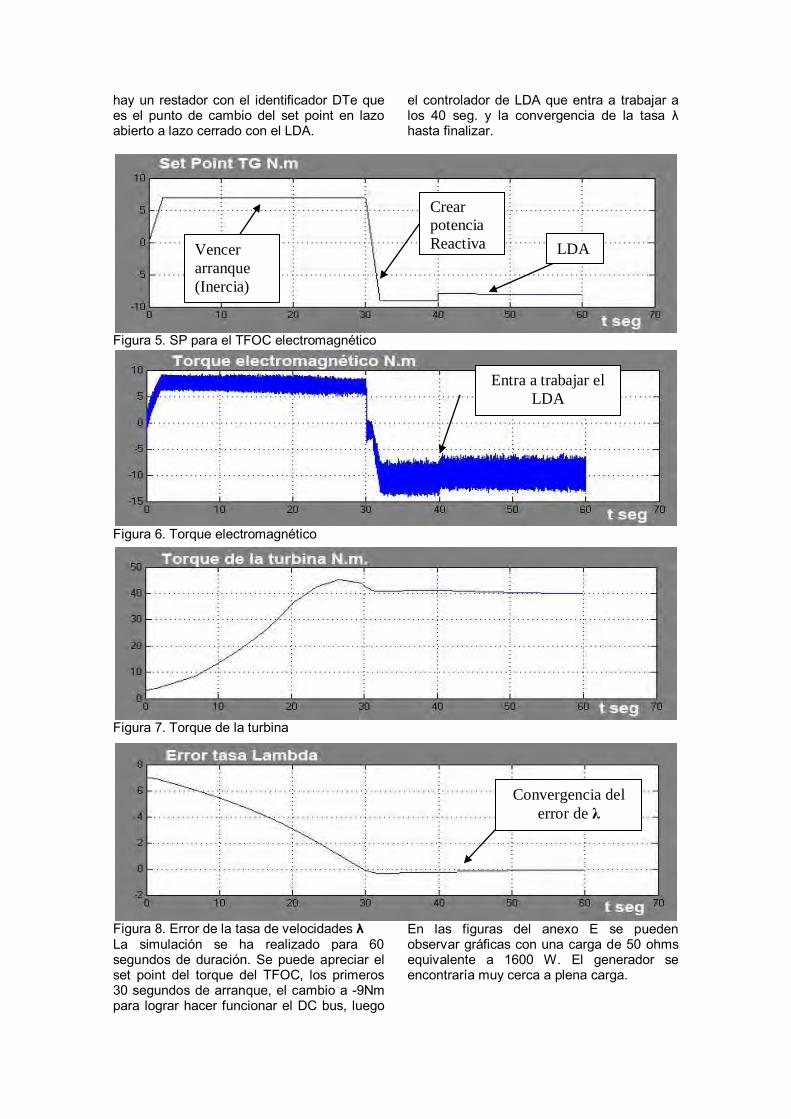
Figura 5. SP para el TFOC electromagnético
Figura 6. Torque electromagnético
Figura 7. Torque de la turbina
Figura 8. Error de la tasa de velocidades λ La simulación se ha realizado para 60 segundos de duración. Se puede apreciar el set point del torque del TFOC, los primeros 30 segundos de arranque, el cambio a -9Nm para lograr hacer funcionar el DC bus, luego
el controlador de LDA que entra a trabajar a los 40 seg. y la convergencia de la tasa λ hasta finalizar.
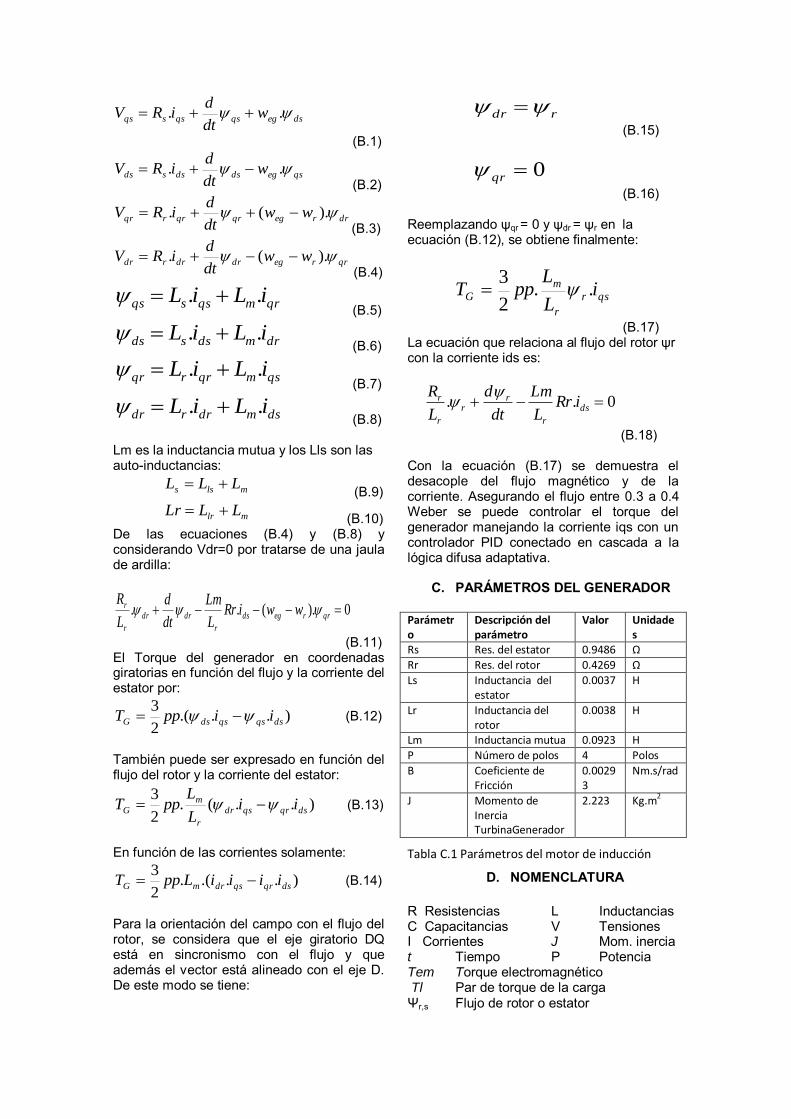
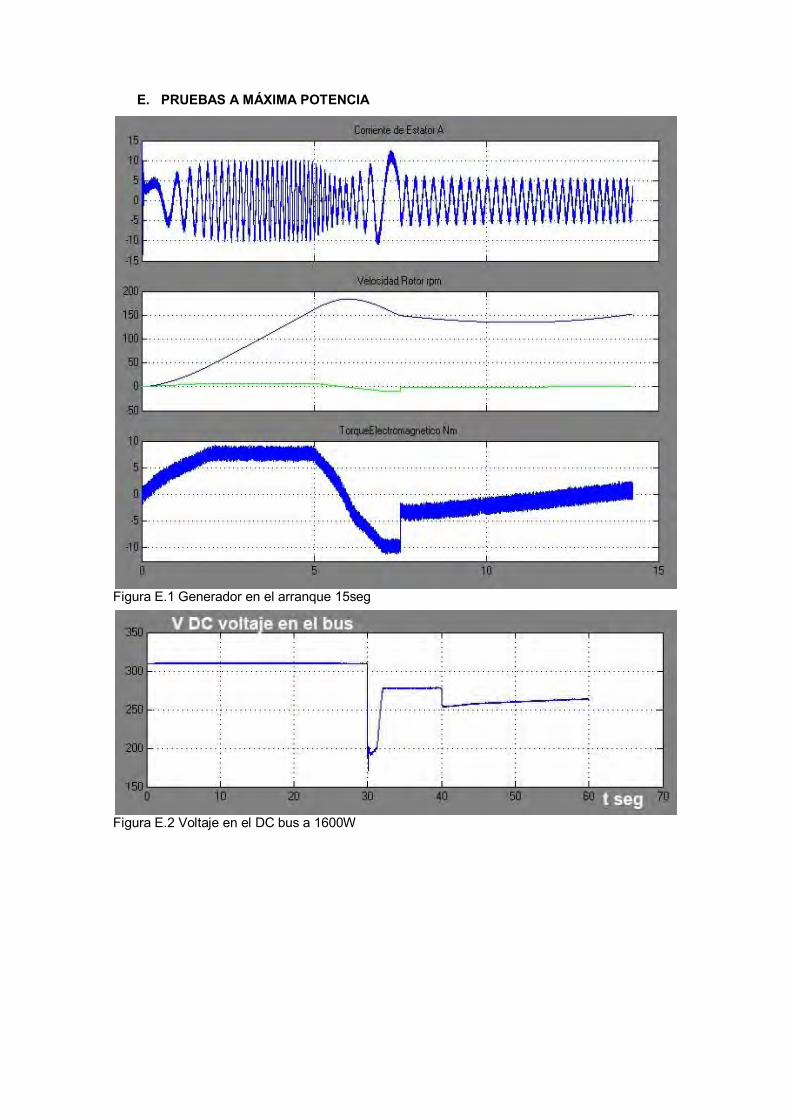
En las figuras del anexo E se pueden observar gráficas con una carga de 50 ohms equivalente a 1600 W. El generador se encontraría muy cerca a plena carga.
Entra a trabajar el
LDA
Convergencia del
error de λ
LDA Vencer
arranque
(Inercia)
Crear
potencia
Reactiva

6. IMPLEMENTACIÓN DEL CONTROLADOR
El controlador es un DSP Texas Instruments, modelo TMS320F28335, el cual está conectado a un módulo de potencia IRAMX de 20 amperios por opto acopladores, para el manejo de la energía proveniente del generador, y por otro lado está conectado a otro módulo de potencia IRAMX de la misma capacidad para generar la tensión para los usuarios a modo de inversor. Un juego de dos IGBT de 600V permite la carga y la conexión al bus DC para uso de las baterías, las cuales están conectadas en serie para alcanzar los 24V y por lo que también se requiere un elevador Buck converter para elevar la tensión a 310V DC antes del inversor. La construcción del módulo de pruebas del generador cuenta con las siguientes partes: El banco de pruebas para el control de LDA, consiste en una bancada con dos motores Siemens de 2.4HP, uno conectado al módulo de potencia del controlador y el otro al variador de velocidad.
Figura 9. Fotografía del sistema El controlador está programado para trabajar en modo de campo orientado, mientras tanto el motor está conectado a un Micromaster 440, comandado por un PLC Siemens S71200, programado en una computadora portátil con el software TIA de Siemens, el PLC debe producir los diferentes pares de torques vs wt, producidos para emular las
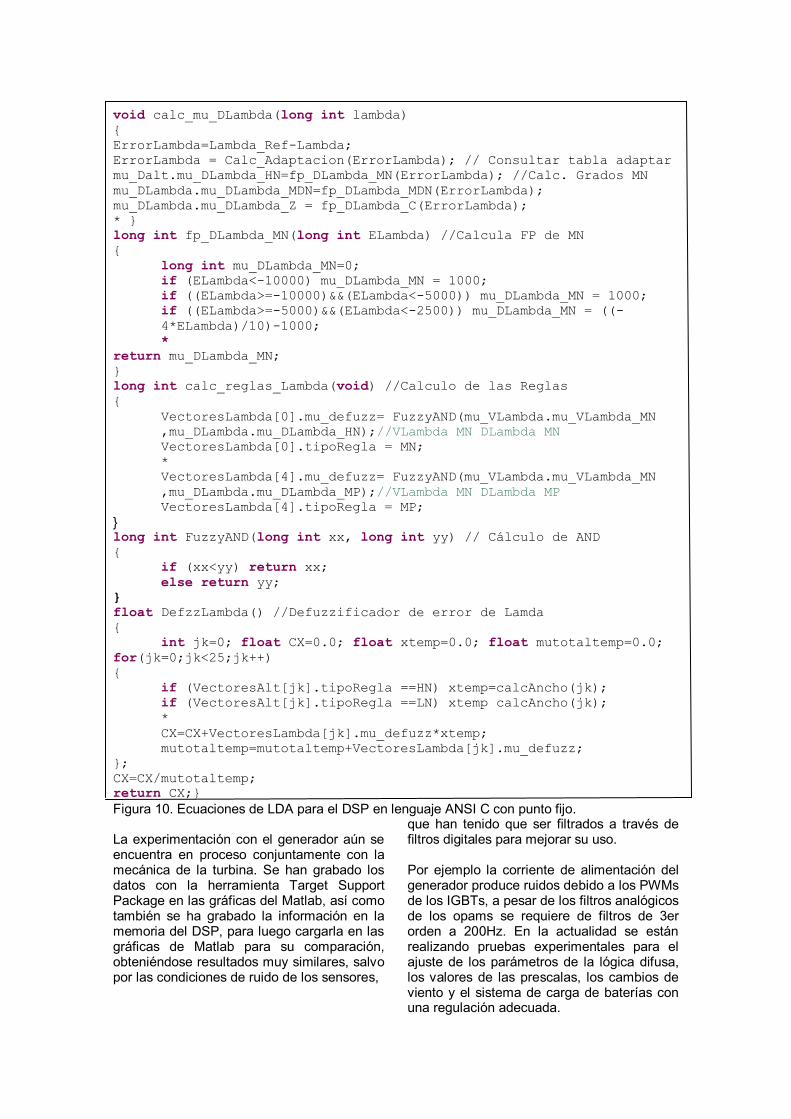
diferentes velocidades del viento. En la figura 9 se puede apreciar el esquema de conexión de la estación experimental. Los módulos de IGBTs son dos puentes de 6 llaves de la International Rectifiers IRAMX20UP60A con sensores de corriente de efecto hall y voltaje. 7. EXPERIMENTACIÓN El DSP Texas Instruments TMS320F28335 ha sido programado en lenguaje C en la suite de programación Code Composer V4. Las rutinas de LDA trabajan con números enteros escalados para aumentar la velocidad de procesamiento. El tiempo de muestreo se ha establecido en 10kHz. Algunas de las rutinas de las funciones de pertenencia se pueden encontrar a continuación en la figura 10, se puede observar el cálculo de las funciones de pertenencia para todas las diferencias de error de Lambda y a continuación se observa el cálculo de una de ellas. Los límites están escalados por 10000 ya que se trata de números enteros. En algunas líneas se agrega * denotando que hay código pero que
no se muestra por hacer espacio. Se muestra una parte del fuzzificador, las reglas de inferencia, el cálculo del valor máximo AND y el defuzzificador. La salida del defuzzificador entre 10000 va al controlador TFOC:
void calc_mu_DLambda(long int lambda)
{
ErrorLambda=Lambda_Ref-Lambda;
ErrorLambda = Calc_Adaptacion(ErrorLambda); // Consultar tabla adaptar
mu_Dalt.mu_DLambda_HN=fp_DLambda_MN(ErrorLambda); //Calc. Grados MN
mu_DLambda.mu_DLambda_MDN=fp_DLambda_MDN(ErrorLambda);
mu_DLambda.mu_DLambda_Z = fp_DLambda_C(ErrorLambda);
* } long int fp_DLambda_MN(long int ELambda) //Calcula FP de MN
{
long int mu_DLambda_MN=0;
if (ELambda<-10000) mu_DLambda_MN = 1000;
if ((ELambda>=-10000)&&(ELambda<-5000)) mu_DLambda_MN = 1000;
if ((ELambda>=-5000)&&(ELambda<-2500)) mu_DLambda_MN = ((-
4*ELambda)/10)-1000;
*
return mu_DLambda_MN;
}
long int calc_reglas_Lambda(void) //Calculo de las Reglas
{
VectoresLambda[0].mu_defuzz= FuzzyAND(mu_VLambda.mu_VLambda_MN
,mu_DLambda.mu_DLambda_HN);//VLambda MN DLambda MN
VectoresLambda[0].tipoRegla = MN;
*
VectoresLambda[4].mu_defuzz= FuzzyAND(mu_VLambda.mu_VLambda_MN
,mu_DLambda.mu_DLambda_MP);//VLambda MN DLambda MP
VectoresLambda[4].tipoRegla = MP;
} long int FuzzyAND(long int xx, long int yy) // Cálculo de AND
{
if (xx<yy) return xx;
else return yy;
} float DefzzLambda() //Defuzzificador de error de Lamda
{
int jk=0; float CX=0.0; float xtemp=0.0; float mutotaltemp=0.0;
for(jk=0;jk<25;jk++)
{
if (VectoresAlt[jk].tipoRegla ==HN) xtemp=calcAncho(jk);
if (VectoresAlt[jk].tipoRegla ==LN) xtemp calcAncho(jk);
*
CX=CX+VectoresLambda[jk].mu_defuzz*xtemp;
mutotaltemp=mutotaltemp+VectoresLambda[jk].mu_defuzz;
};
CX=CX/mutotaltemp;
return CX;} Figura 10. Ecuaciones de LDA para el DSP en lenguaje ANSI C con punto fijo. La experimentación con el generador aún se encuentra en proceso conjuntamente con la mecánica de la turbina. Se han grabado los datos con la herramienta Target Support Package en las gráficas del Matlab, así como también se ha grabado la información en la memoria del DSP, para luego cargarla en las gráficas de Matlab para su comparación, obteniéndose resultados muy similares, salvo por las condiciones de ruido de los sensores,
que han tenido que ser filtrados a través de filtros digitales para mejorar su uso. Por ejemplo la corriente de alimentación del generador produce ruidos debido a los PWMs de los IGBTs, a pesar de los filtros analógicos de los opams se requiere de filtros de 3er orden a 200Hz. En la actualidad se están realizando pruebas experimentales para el ajuste de los parámetros de la lógica difusa, los valores de las prescalas, los cambios de viento y el sistema de carga de baterías con una regulación adecuada.
8. RECOMENDACIONES La investigación en las turbinas eólicas tiene un camino muy largo que recorrer, el aprovechamiento de la fuerza del aire aún no sobrepasa en promedio el 40%, aún se encuentran problemas de almacenamiento de la energía, así como los problemas que se encuentran en las transmisiones y los generadores, ya que estos son equipos que aún no se adaptan a la tecnología de las turbinas. En los países andinos como el Perú, se tiene la posibilidad de aprovechar las alturas para poder almacenar la energía producida por grandes turbinas en forma de energía potencial, bombeando agua desde la costa hasta reservorios ó represas ubicadas en altura, de manera que el agua pueda reemplazar otro método de almacenamiento como las baterías, luego el agua puede ser devuelta pasando por turbinas hidráulicas 9. CONCLUSIONES
El presente proyecto de investigación ha tenido como objetivo principal el definir una estrategia de control para una turbia eólica de baja potencia. En la actualidad, el uso de controladores inteligentes con nuevas estrategias como la LDA, las RNA, los algoritmos genéticos entre otros, están tomando más importancia y gracias al aumento de la performance de los DSP, se puede contar hoy con la aplicación de técnicas robustas y flexibles.
La lógica difusa adaptativa LDA ha probado ser exitosa en las pruebas de laboratorio, donde se le ha dado condiciones extremas de excitación, el empleo del error y la variación de error conjuntamente con las reglas, reproducen de alguna manera el criterio de convergencia y de estabilidad, así como la recursividad por trabajar con la información de la muestra del paso que le precede, similar a lo que sucede en una ecuación diferencia discreta. Si bien no se basa en un cálculo riguroso como se hace con un modelo matemático, en la práctica, el control trabaja tal como lo hace el ser humano, en base al conocimiento y a la adaptabilidad.
Los circuitos electrónicos de potencia y los microprocesadores son cada vez más económicos, las turbinas que trabajan de forma independiente pueden utilizar módulos de potencia y tarjetas de control con precios
realizables, abaratando los costos y haciendo posible la competencia entre la red eléctrica interconectada y el que un poblador en una zona alejada, pueda autoabastecerse con una energía limpia y renovable. 10. REFERENCIAS BIBLIOGRÁFICAS [1] O.Anaya,n.Jenkins, J.Ekenawake, P.Cartwrght,M.Hughes,“Wind Energy Generation, Modelling and Control”, Wiley 2009 [2] Stephen Chapman, “Electrical Machinery Fundamentals” McGraw Hill 2005 [3] Roberto Leidhold, Guillermo García, María Inés Valla, “Control para máximo rendimiento de generadores eólicos de velocidad variable, con limitación de velocidad y potencia”, Universidad Nacional de Río Cuarto, Universidad Nacional de la Plata, XIV Congresso Brasileiro de Automática 2002 [4] Bimal Bose, “Power Electronics and Motor Drives”, Elsevier 2006 [5] P. Patcharaprakit, S. Premrudee-preechacharn, Y. Sriuthaisiriwong “ Maximum Power Tracking using Adaptive Fuzzy Logic control for grid- connected Photovoltaic System”, Chian Mai University, Elsevier 2005 [6] Manfred Stieber, “Wind Energy Systems for Power Generation”, Springer 2008 [7] P. Krause, O. Wasynczuk, S. Sudhoff, “Analysis of Electrical Machinery”, IEEE PES, Wiley Interscience 2002
ANEXOS
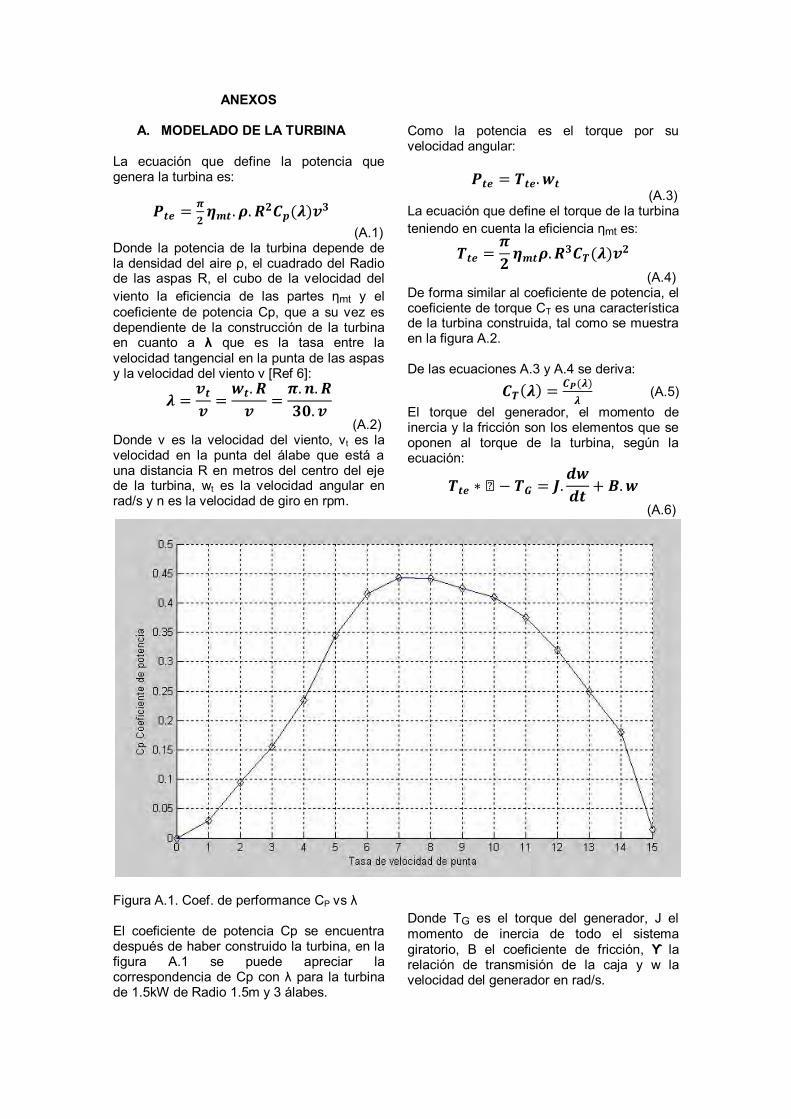
A. MODELADO DE LA TURBINA La ecuación que define la potencia que genera la turbina es:
(A.1) Donde la potencia de la turbina depende de la densidad del aire ρ, el cuadrado del Radio de las aspas R, el cubo de la velocidad del viento la eficiencia de las partes ηmt y el coeficiente de potencia Cp, que a su vez es dependiente de la construcción de la turbina en cuanto a λ que es la tasa entre la velocidad tangencial en la punta de las aspas y la velocidad del viento v [Ref 6]:
(A.2) Donde v es la velocidad del viento, vt es la velocidad en la punta del álabe que está a una distancia R en metros del centro del eje de la turbina, wt es la velocidad angular en rad/s y n es la velocidad de giro en rpm.
Figura A.1. Coef. de performance CP vs λ El coeficiente de potencia Cp se encuentra después de haber construido la turbina, en la figura A.1 se puede apreciar la correspondencia de Cp con λ para la turbina de 1.5kW de Radio 1.5m y 3 álabes.
Como la potencia es el torque por su velocidad angular:
(A.3)
La ecuación que define el torque de la turbina teniendo en cuenta la eficiencia ηmt es:
(A.4) De forma similar al coeficiente de potencia, el coeficiente de torque CT es una característica de la turbina construida, tal como se muestra en la figura A.2. De las ecuaciones A.3 y A.4 se deriva:
(A.5)
El torque del generador, el momento de inercia y la fricción son los elementos que se oponen al torque de la turbina, según la ecuación:
(A.6)
Donde TG es el torque del generador, J el momento de inercia de todo el sistema giratorio, B el coeficiente de fricción, ϒ la relación de transmisión de la caja y w la velocidad del generador en rad/s.
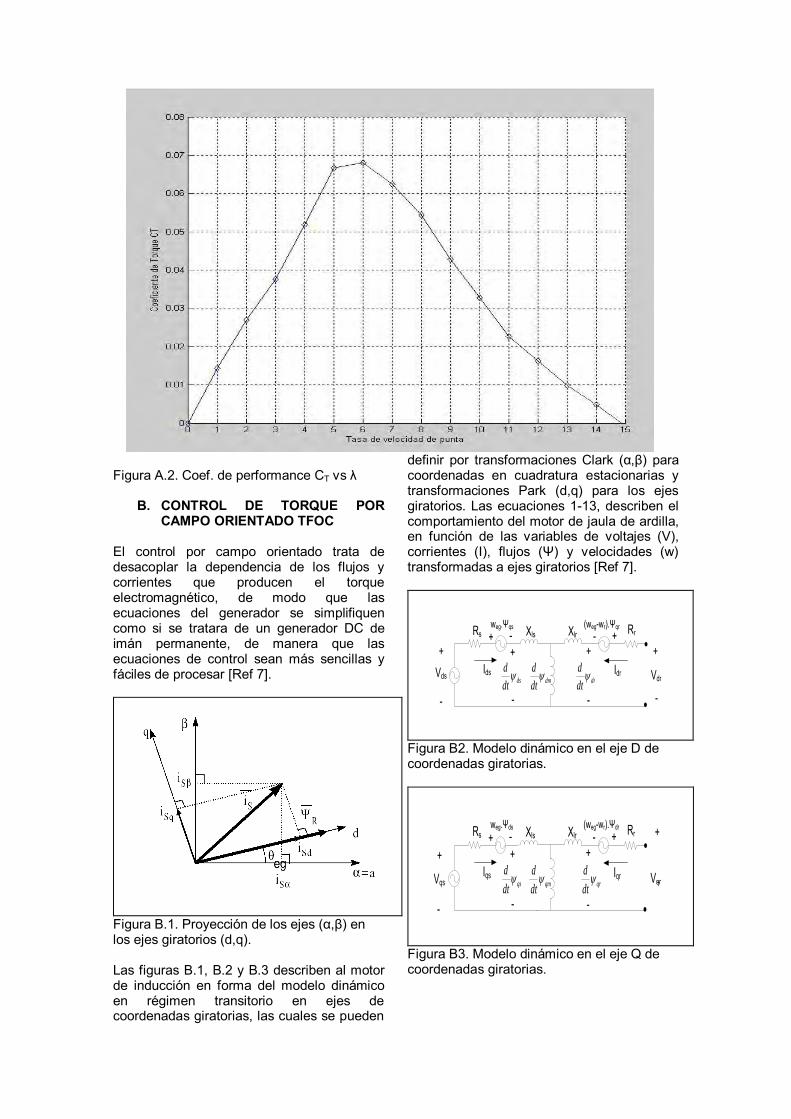
Figura A.2. Coef. de performance CT vs λ
B. CONTROL DE TORQUE POR CAMPO ORIENTADO TFOC
El control por campo orientado trata de desacoplar la dependencia de los flujos y corrientes que producen el torque electromagnético, de modo que las ecuaciones del generador se simplifiquen como si se tratara de un generador DC de imán permanente, de manera que las ecuaciones de control sean más sencillas y fáciles de procesar [Ref 7].
Figura B.1. Proyección de los ejes (α,β) en los ejes giratorios (d,q). Las figuras B.1, B.2 y B.3 describen al motor de inducción en forma del modelo dinámico en régimen transitorio en ejes de coordenadas giratorias, las cuales se pueden
definir por transformaciones Clark (α,β) para coordenadas en cuadratura estacionarias y transformaciones Park (d,q) para los ejes giratorios. Las ecuaciones 1-13, describen el comportamiento del motor de jaula de ardilla, en función de las variables de voltajes (V), corrientes (I), flujos (Ψ) y velocidades (w) transformadas a ejes giratorios [Ref 7].
Rs Xls Xlr Rr
Ids Idr
- -
+ +
dsdt
d dr
dt
d
+
-
Vdr
-+ +-weg.Ψqs
dmdt
d
(weg-wr).Ψqr
Vds
-
+
Figura B2. Modelo dinámico en el eje D de coordenadas giratorias.
Rs Xls Xlr Rr
Vqs
-
Iqs Iqr
- -
+ +
qsdt
d qr
dt
d
+
-Vqr
+-+ +-
weg.Ψds
qmdt
d
(weg-wr).Ψdr
Figura B3. Modelo dinámico en el eje Q de coordenadas giratorias.
dsegqsqssqs wdt
diRV ..
(B.1)
qsegdsdssds wdt
diRV ..
(B.2)
drregqrqrrqr wwdt
diRV ).(.
(B.3)
qrregdrdrrdr wwdt
diRV ).(.
(B.4)
qrmqssqs iLiL .. (B.5)
drmdssds iLiL .. (B.6)
qsmqrrqr iLiL .. (B.7)
dsmdrrdr iLiL .. (B.8)
Lm es la inductancia mutua y los Lls son las auto-inductancias:
mlss LLL (B.9)
mlr LLLr (B.10) De las ecuaciones (B.4) y (B.8) y considerando Vdr=0 por tratarse de una jaula de ardilla:
0).(.. qrregds
r
drdr
r
r wwiRrL
Lm
dt
d
L
R
(B.11) El Torque del generador en coordenadas giratorias en función del flujo y la corriente del estator por:
)...(2
3dsqsqsdsG iippT (B.12)
También puede ser expresado en función del flujo del rotor y la corriente del estator:
)..(.2
3dsqrqsdr
r
m
G iiL
LppT (B.13)
En función de las corrientes solamente:
)...(.2
3dsqrqsdrmG iiiiLppT (B.14)
Para la orientación del campo con el flujo del rotor, se considera que el eje giratorio DQ está en sincronismo con el flujo y que además el vector está alineado con el eje D. De este modo se tiene:
rdr
(B.15)
0qr
(B.16) Reemplazando ψqr = 0 y ψdr = ψr en la ecuación (B.12), se obtiene finalmente:
qsr
r
m
G iL
LppT ..
2
3
(B.17) La ecuación que relaciona al flujo del rotor ψr con la corriente ids es:
0.. ds
r
rr
r
r iRrL
Lm
dt
d
L
R
(B.18)
Con la ecuación (B.17) se demuestra el desacople del flujo magnético y de la corriente. Asegurando el flujo entre 0.3 a 0.4 Weber se puede controlar el torque del generador manejando la corriente iqs con un controlador PID conectado en cascada a la lógica difusa adaptativa.
C. PARÁMETROS DEL GENERADOR Parámetro
Descripción del parámetro
Valor Unidades
Rs Res. del estator 0.9486 Ω
Rr Res. del rotor 0.4269 Ω
Ls Inductancia del estator
0.0037 H
Lr Inductancia del rotor
0.0038 H
Lm Inductancia mutua 0.0923 H
P Número de polos 4 Polos
B Coeficiente de Fricción
0.00293
Nm.s/rad
J Momento de Inercia TurbinaGenerador
2.223 Kg.m2
Tabla C.1 Parámetros del motor de inducción
D. NOMENCLATURA
R Resistencias L Inductancias C Capacitancias V Tensiones I Corrientes J Mom. inercia t Tiempo P Potencia Tem Torque electromagnético Tl Par de torque de la carga Ψr,s Flujo de rotor o estator
E. PRUEBAS A MÁXIMA POTENCIA
Figura E.1 Generador en el arranque 15seg
Figura E.2 Voltaje en el DC bus a 1600W