BAB III Rakayasa Jalan Raya Ok
55
BAB III PERENCANAAN ALINYEMEN A. Umum Perencanaan alinyemen adalah perencanaan untuk mendimensi suatu rute jalan secara nyata sesuai dengan tuntutan dan sifat –sifat lalu lintas. Didalam merencanakaan alinyemen jalan harus memperhatikan dan mempertimbangkan factor-faktor yang mempengaruhi, seperti : keadaan fisik dan fotografi daerah data lalu lintas,keamanan,analisa, ekonomi dan sebagainya. 1. Kondisi Fisik Dan Topografi Kondisi fisik dan topografi daerah sangat mempengaruhi penetapan alinyemen, kelandaian dan jarak pandang. Pada daerah yang curam lebih menyulitkan dibandingkan dengan daerah datar karena akan menimbulkan pekerjaan tanah yang besar akan membutuhkan peralatan dan teknologi yang tinggi, sehingga kalau ditinjau dari segi ekonomi akan kurang efesien. Untuk menghindari biaya yang tidak efesien tersebut, maka kelandaian jalan dapat disesuaikan dengan keadaan tertentu yang ada 25
-
Upload
yudi-pranoto -
Category
Documents
-
view
239 -
download
4
description
mantap
Transcript of BAB III Rakayasa Jalan Raya Ok
BAB III
PERENCANAAN ALINYEMEN
A. Umum
Perencanaan alinyemen adalah perencanaan untuk mendimensi suatu rute jalan
secara nyata sesuai dengan tuntutan dan sifat –sifat lalu lintas. Didalam
merencanakaan alinyemen jalan harus memperhatikan dan mempertimbangkan
factor-faktor yang mempengaruhi, seperti : keadaan fisik dan fotografi daerah
data lalu lintas,keamanan,analisa, ekonomi dan sebagainya.
1. Kondisi Fisik Dan Topografi
Kondisi fisik dan topografi daerah sangat mempengaruhi penetapan
alinyemen, kelandaian dan jarak pandang.
Pada daerah yang curam lebih menyulitkan dibandingkan dengan daerah datar
karena akan menimbulkan pekerjaan tanah yang besar akan membutuhkan
peralatan dan teknologi yang tinggi, sehingga kalau ditinjau dari segi ekonomi
akan kurang efesien. Untuk menghindari biaya yang tidak efesien tersebut,
maka kelandaian jalan dapat disesuaikan dengan keadaan tertentu yang ada
konsekuensi turunanya kapasitas karena turunnya kecepatan jalan.
2. Kondisi Lalu Lintas
Kondisi lalu lintas mempunyai pengaruh di tinjau dari volume lalu lintas dan
kecepatannya.
a. Volume Lalu Lintas
Volume lalu lintas mempunyai pengaruh langsung pada lebar jalan yang
diperlukan dan volume disini dinyatakan dengan LHR (Lalu Lintas
Harian Rata-rata).
25
Selain jumlahnya volume data lalu lintas harus menunjukan komposisi
dari lalu lintas tersebut, karena jalan yang diperlukan untuk jumlah lalu
lintas yang sama tapi komposisinya berbeda akan berbeda pula lebarnya.
Yang dimaksud komposisi disini adalah pembagian kendaraan menurut
jenisnya, biasanya dibagi menurut 2 golongan besar, yaitu:
1. Kendaraan ringan
2. Kendaraan berat
Yang dimaksud dengan kendaraan ringan adalah kendaraan yang
mempunyai berat lebih kecil dari 5 ton, seperti : mobil penumpang,
sedan, jep, pick ap. Sedangkan yang dimaksud kendaraan berat adalah
kendaraan yang beratnya lebih berat atau sama dengan 5 ton seperti : bus
truk as tunggal dan truk as ganda.
b. Kecepatan
Seperti disebutkan diatas bahwa pengaruh lalu lintas terhadap
perencanaan jalan selain volume adalah kecepatannya. Hal ini jelas
karena kondisi fisik yang akan melayani jalan dengan keecepatan rendah
tentu saja berbeda dengan jalan untuk kendaraan dengan kecepatan tinggi.
Didalam rekayasa jalan raya kecepatan dibagi menjadi tiga, yaitu :
1). Kecepatan Rencana
Berdasarkan pertimbangan keamanan, kenyamanan dan ekonomis
serta memperhatikan keadaan lalu lintas dan topografi tempat dapat
ditetapkan suatu kecepatan yang sesuai dengan kelas jalan yang
diambil kecepatan ini disebut “kecepatan rencana” yang
kelanjutannya akan digunakan sebagai dasar perhitungan geometrik
jalur jalan yang bersangkutan. Dengan pengertian lain kecepatan
rencaana adalah kecepatan aman maksimum yang bisa dijalankan
pada suatu bagian/jalur tertentu.
26
Jadi secara umum kecepatan rencana dapat didefinisikan sebagai
berikut : Kecepatan rencana adalah kecepatan yang dipilih untuk
kecepatan merencanakan dan mengkorelaksikan bentuk-bentuk setiap
bagian jalan raya seperti : tikungan, kemiringan, jarak pandang, dan
sebagainya, dimana tergantung pada keamanan jalannya kendaraan.
Penetapan kecepatan rencana sangat tergantung pada kelas jalan dan
keadaan topografi suatu daerah. Ketentuan kecepatan rencana
menurut bina marga adalah sebagai berikut :
Tabel 3.1. Kecepatan Rencana
Kelas Jalan Kondisi Medan Kecepatan Rencana (km/jam)
I DBG
12010080
IIA D
B
G
100
80
60
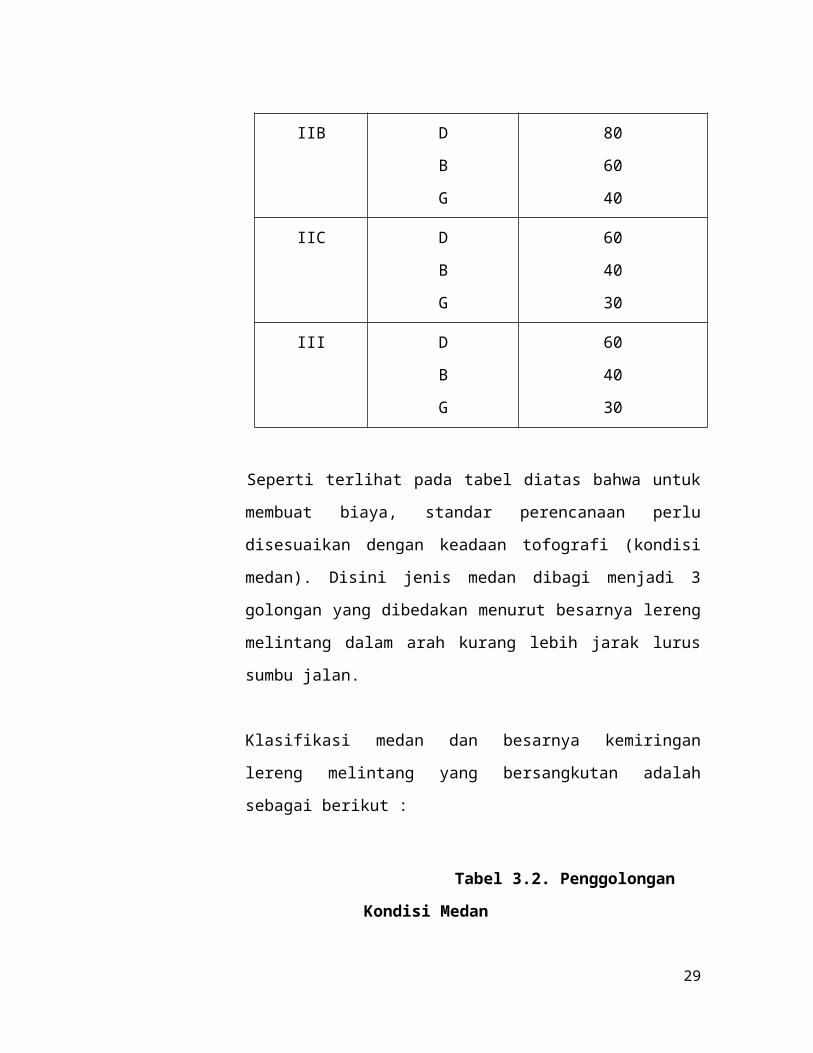
IIB D
B
G
80
60
40
IIC D
B
G
60
40
30
III D
B
G
60
40
30
27
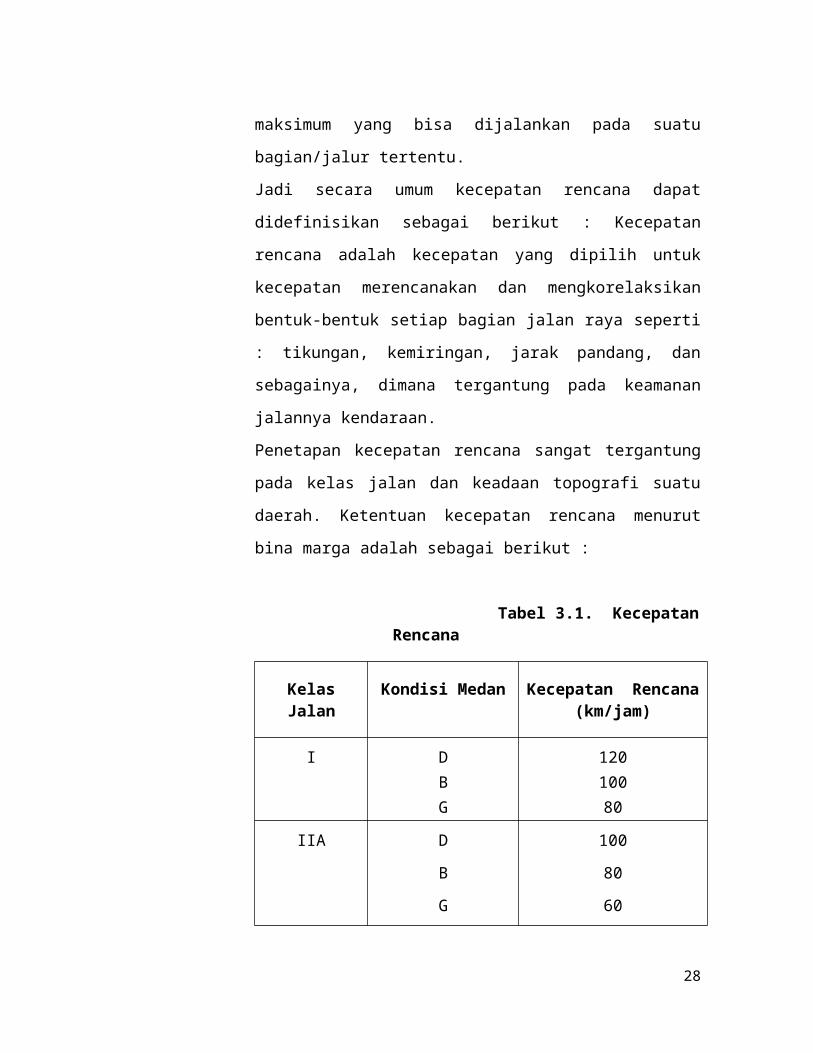
Seperti terlihat pada tabel diatas bahwa untuk membuat biaya, standar
perencanaan perlu disesuaikan dengan keadaan tofografi (kondisi
medan). Disini jenis medan dibagi menjadi 3 golongan yang dibedakan
menurut besarnya lereng melintang dalam arah kurang lebih jarak
lurus sumbu jalan.
Klasifikasi medan dan besarnya kemiringan lereng melintang yang
bersangkutan adalah sebagai berikut :
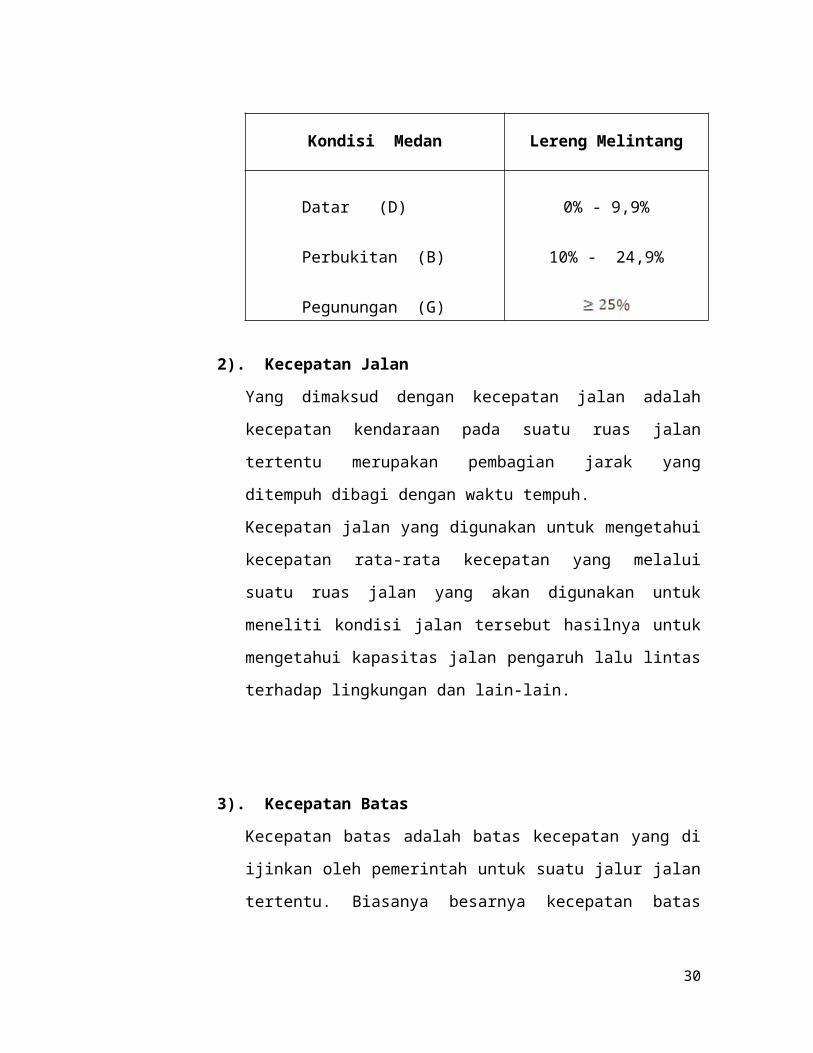
Tabel 3.2. Penggolongan Kondisi Medan
Kondisi Medan Lereng Melintang
Datar (D)
Perbukitan (B)
Pegunungan (G)
0% - 9,9%
10% - 24,9%
2). Kecepatan Jalan
Yang dimaksud dengan kecepatan jalan adalah kecepatan kendaraan
pada suatu ruas jalan tertentu merupakan pembagian jarak yang
ditempuh dibagi dengan waktu tempuh.
Kecepatan jalan yang digunakan untuk mengetahui kecepatan rata-rata
kecepatan yang melalui suatu ruas jalan yang akan digunakan untuk
meneliti kondisi jalan tersebut hasilnya untuk mengetahui kapasitas
jalan pengaruh lalu lintas terhadap lingkungan dan lain-lain.
3). Kecepatan Batas
28
Kecepatan batas adalah batas kecepatan yang di ijinkan oleh
pemerintah untuk suatu jalur jalan tertentu. Biasanya besarnya
kecepatan batas ditetapkan sedikit lebih rendah dari kecepatan rencana
jalan tersebut. Hal ini disebabkan kecenderungan manusia untuk
melanggar kecepatan yang ditetapkan, sehingga apabila pengemudi
mengendarai kendaraan diatas kecepatan batas mereka masih dalam
batas yang aman.
B. Perencanaan Alinyemen Horisontal
Yang dimaksud elinyemen horizontal adalah proyeksi sumbu jalan pada bidang
horizontal. Alinyemen Horisontal disebut juga dengan gambar “situasi jalan atau
trase jalan”.
Alinyemen Horisontal terdiri dari garis-garis lurus yang dihubungkan dengan
garis lengkung, garis lengkung bisa berupa busur lingkaran dengan busur
peralihan atau busur peralihan saja.
1. Gaya Sentrifugal
Apabila suatu kendaraan berjalan pada suatu tikungan akan mengalami gaya
sentrifugal besar dan kecepatan gaya yang terjadi menentukan bentuk lintasan
kendaraan yang bersangkutan dengan kecepatan rencana yang telah ditentukan
dapat ditentukan besarnya jari-jari minimum tikungan sehingga kendaraan
aman melewatinya.
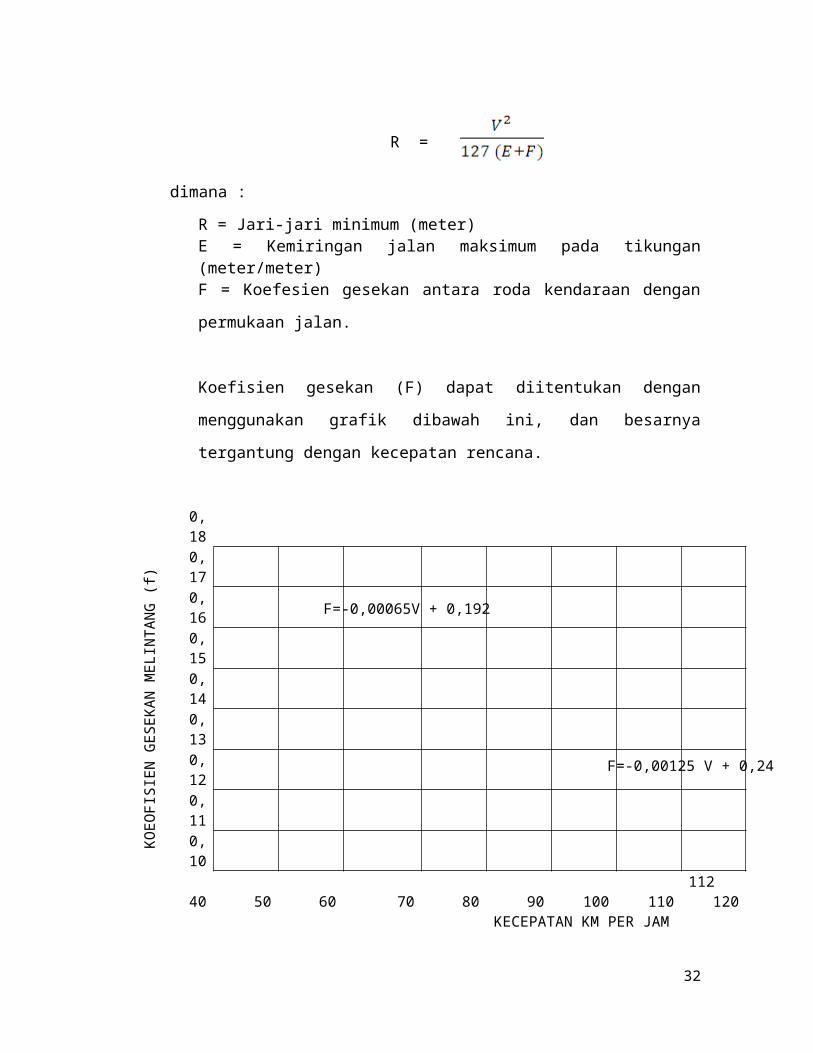
R =
dimana :
R = Jari-jari minimum (meter)E = Kemiringan jalan maksimum pada tikungan (meter/meter)F = Koefesien gesekan antara roda kendaraan dengan permukaan jalan.
29
Koefisien gesekan (F) dapat diitentukan dengan menggunakan grafik dibawah
ini, dan besarnya tergantung dengan kecepatan rencana.
0,18
KOEO
FISI
EN G
ESEK
AN M
ELIN
TAN
G (f
)
0,17
0,16
0,15
0,14
0,13
0,12
0,11
0,10 112
40 50 60 70 80 90 100 110 120
KECEPATAN KM PER JAM
Gambar 3.1. Garfik Koefisien Gesek
C. Lingkungan Peralihan
Pada lengkung horizontal yang mempunyai jari-jari yang besar lintasan
kendaraan masih dapat tetap berada pada lajur jalannya, tetapi pada tikungan
yang tajam (sudut perpotongan besar) kendaraan akan menyimpang dan keluar
jalur yang disediakan dan mengambil lajur lain disampingnya. Guna menghindari
hal tersebut diatas, sebaiknya dibuatkan lengkung peralihan dimana lengkung
tersebut merupakan lengkung peralihan dari R = tak terhingga ke R = jari-jari
lingkaran (Rc). Lengkung ini disebut lengkung peralihan atau lengkung spiral.
30
F=-0,00065V + 0,192
F=-0,00125 V + 0,24
Keuntungan dari penggunaan lengkung peralihan pada alinyemen horizontal
adalah :
1. Pengemudi dapat dengan mudah mengikuti lajur yang disediakan, tanpa
melintasi lajur lain.
2. Memungkinkan pengadaan perubahan dari lereng jalan normal kemiringan
super elevasi secara berangsur-angsur.
3. Memungkinkan mengadakan peralihan pelebaran perkerasan yang diperlukan
jalan lurus ke kebutuhan lebar perkerasan pada tikungan.
4. Menambah keamanan dan kenyamanan bagi pengemudi, karena sedikit
kemungkinan pengemudi keluar dari lajur.
5. Menambah keindahan bentuk jalan tersebut, menghindari kesan patahnya
jalan pada batas bagian lurus dan bagian lengkung lingkaran.
D. Perhitungan Alinyemen Horisontal
Dalam perencanaan alinyemen horizontal dikenal ada tiga macam lengkung
yaitu :
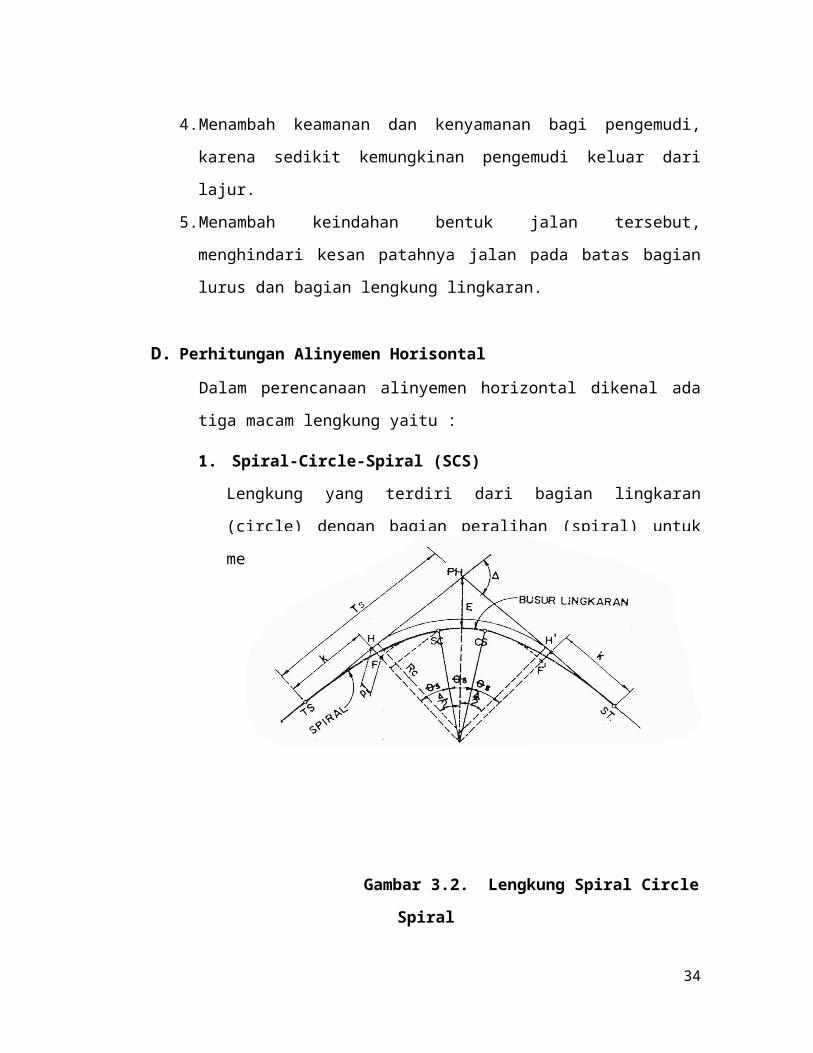
1. Spiral-Circle-Spiral (SCS)
Lengkung yang terdiri dari bagian lingkaran (circle) dengan bagian
peralihan (spiral) untuk menghubungkan dengan bagian lurus (tangen).
Gambar 3.2. Lengkung Spiral Circle Spiral
31
Lengkung TS – SC adalah lengkung peralihan berbentuk spiral (clothoid)
yang menghubungkan bagian lurus dengan radius tak terhingga diawal
spiral (kiri TS) dengan bagian lingkaran dengan radius = Rc diakhiri
spiral (kanan SC).
Titik TS adalah titik peralihan dari bagian lurus kebagian berbentuk spiral
dengan titik SC adalah titik peralihan bagian spiral kebagian lingkaran.
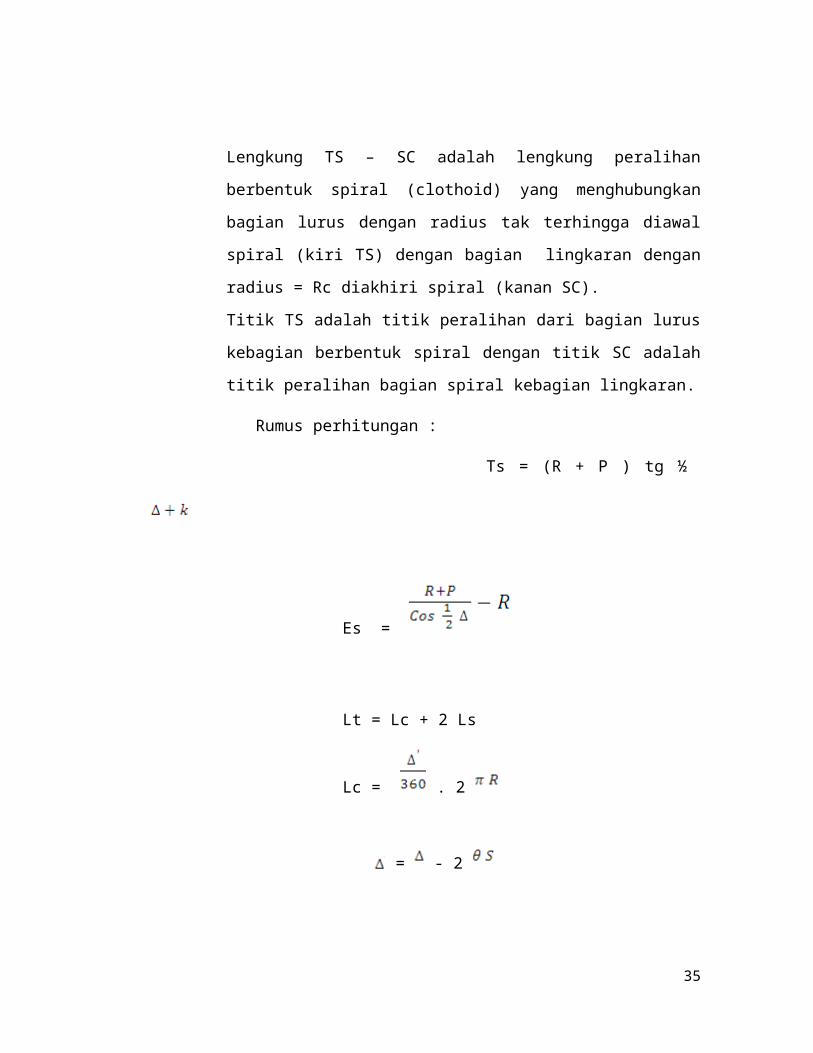
Rumus perhitungan :
Ts = (R + P ) tg ½
Es =
Lt = Lc + 2 Ls
Lc = . 2
= - 2
Radius ditentukan dulu berdasarkan R minimum serta kondisi lapangan,
kemudian lihat tabel (lampiran I) untuk menentukan Ls, deengan Ls dan
R yang ada maka p, k, dan dapat dicari dengan menggunakan tabel
(lampiran II).
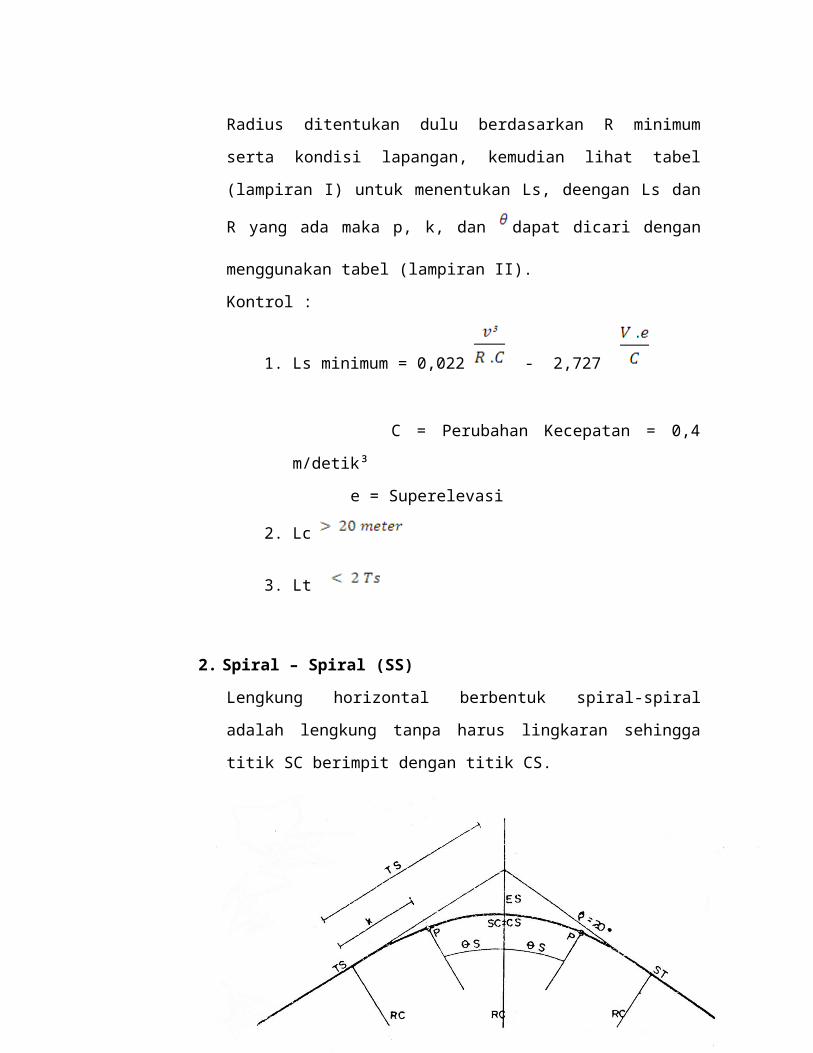
Kontrol :
1. Ls minimum = 0,022 - 2,727
32
C = Perubahan Kecepatan = 0,4 m/detik³
e = Superelevasi
2. Lc
3. Lt
2. Spiral – Spiral (SS)
Lengkung horizontal berbentuk spiral-spiral adalah lengkung tanpa harus
lingkaran sehingga titik SC berimpit dengan titik CS.
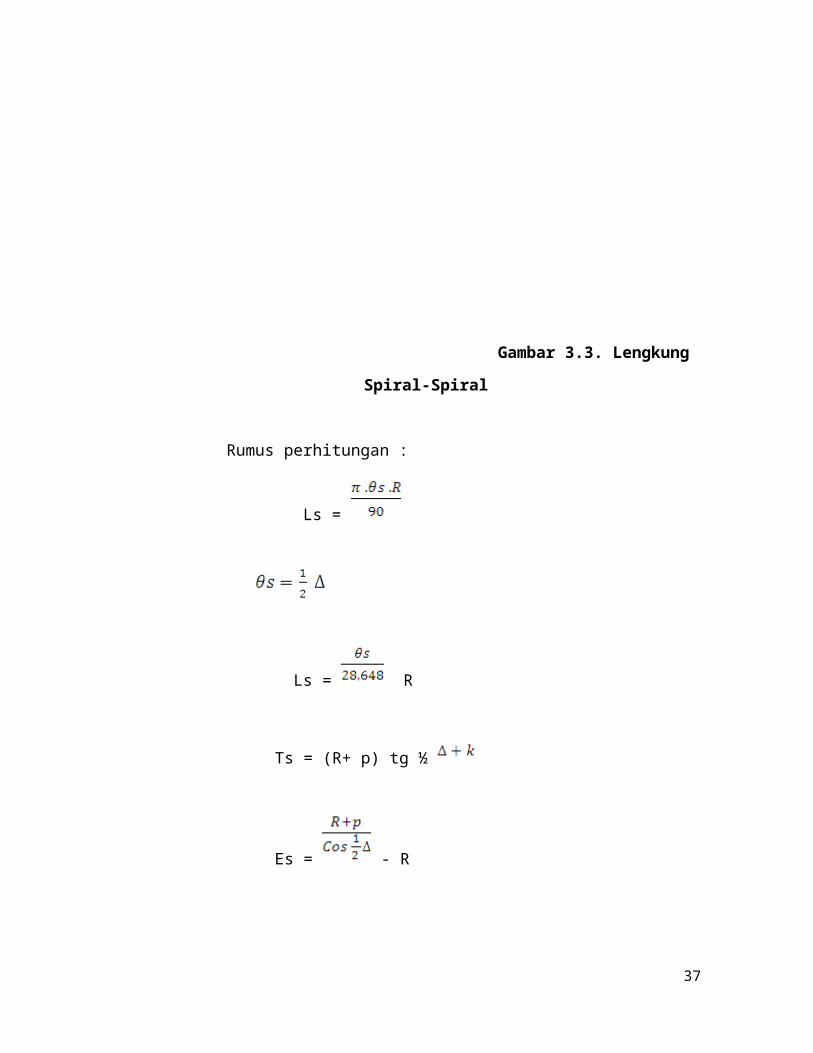
Gambar 3.3. Lengkung Spiral-Spiral
Rumus perhitungan :
Ls =
33
Ls = R
Ts = (R+ p) tg ½
Es = - R
di hitung dulu secara analitis, kemudian dihitung dan harga p dan k
dilihat pada tabel lampiran, pada baris yang sesuai dengan
P = P* . Ls
K = k* . Ls
Kontrol 2 Ls
3. Lengkung Lingkaran Sederhana / Full Circle (FC)
Tidak semua lengkung dapat dibuat berbentuk lengkung/busur lingkaraan
sederhana, hanya lengkung dengan radius besar yang diperbolehkan.
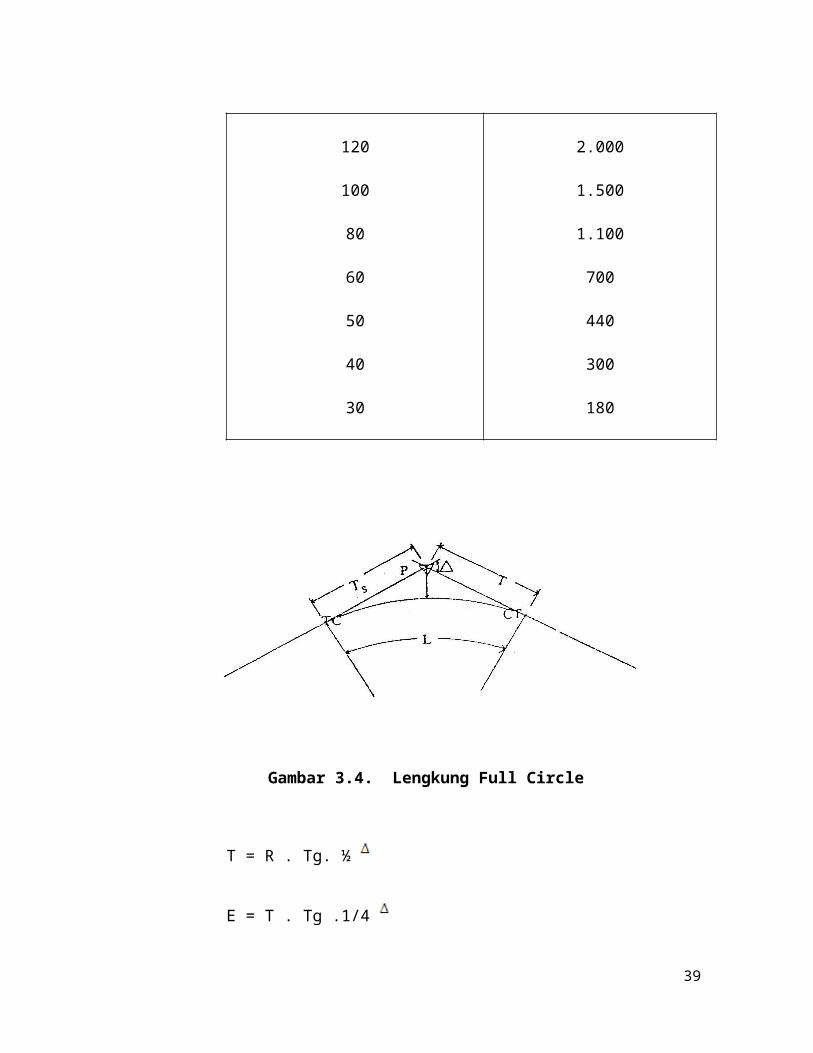
Tabel 3.3. Radius Minimum Untuk Lengkung Full Circle
Kecepatan Rencana
(Km/Jam)
Radius Minimum
(m)
34
120
100
80
60
50
40
30
2.000
1.500
1.100
700
440
300
180
Gambar 3.4. Lengkung Full Circle
T = R . Tg. ½
E = T . Tg .1/4
L = .
35
Bagian lurus dari jalan (dikiri TC atau dikanan CT) dinamakan bagian
TANGEN. Titik peralihan dari bentuk tangent kebentuk busur lingkaran
dinamakan titik TC dan titik peralihan dari bagian busur lingkaran
kebentuk lurus dinamakan titik CT.
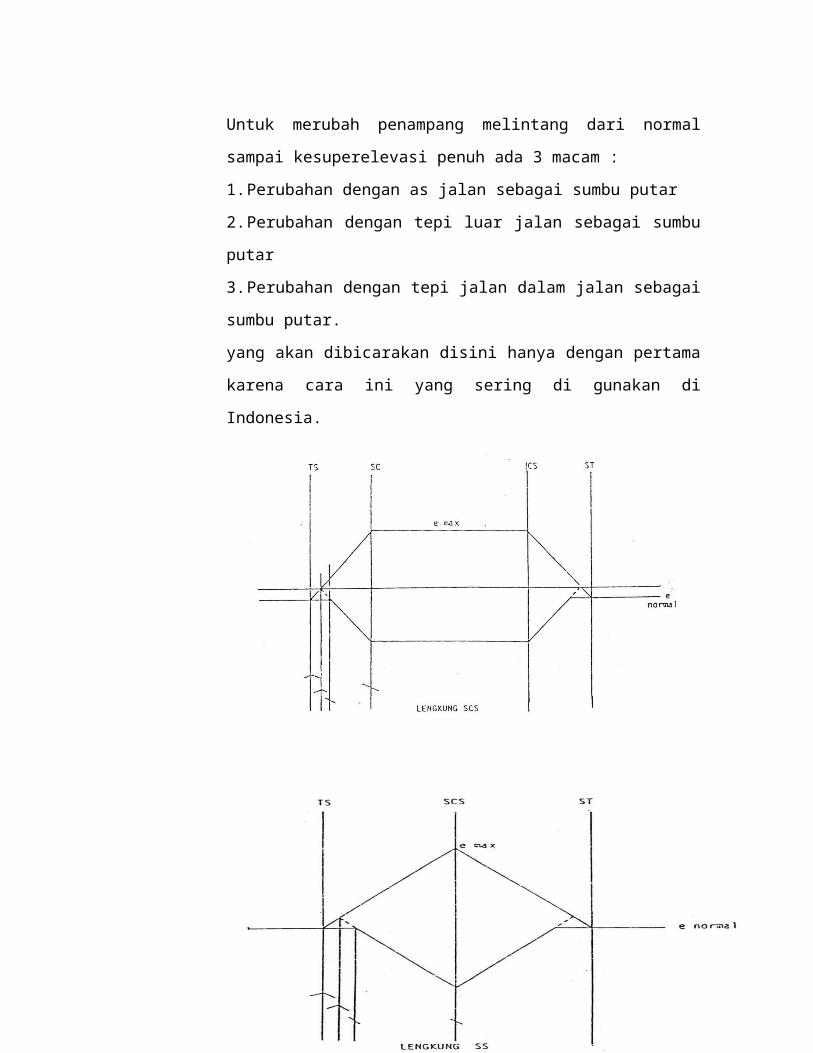
4. Diagram Superelevasi
Diagram superelevasi adalah suatu diagram yang memperlihatkan
panjang yang diperlukan untuk merubah kemiringan melintang dari
keadaan normal sampai superelevasi penuh dan juga memperlihatkan
besarnya superelevasi yang terjadi pada setiap bagian tikungan. Jadi
diagram superelevasi menunjukan perubahan penampang melintang dari
bentuk normal (normal cown) menjadi bentuk super elevasi penuh.
Yang dimaksud superelevasi penuh adalah kemiringan maksimum yang
harus dicapai pada suatu tikungan tergantung dari kecepatan rencana yang
digunakan.
Untuk merubah penampang melintang dari normal sampai kesuperelevasi
penuh ada 3 macam :
1. Perubahan dengan as jalan sebagai sumbu putar
2. Perubahan dengan tepi luar jalan sebagai sumbu putar
3. Perubahan dengan tepi jalan dalam jalan sebagai sumbu putar.
yang akan dibicarakan disini hanya dengan pertama karena cara ini yang
sering di gunakan di Indonesia.
36
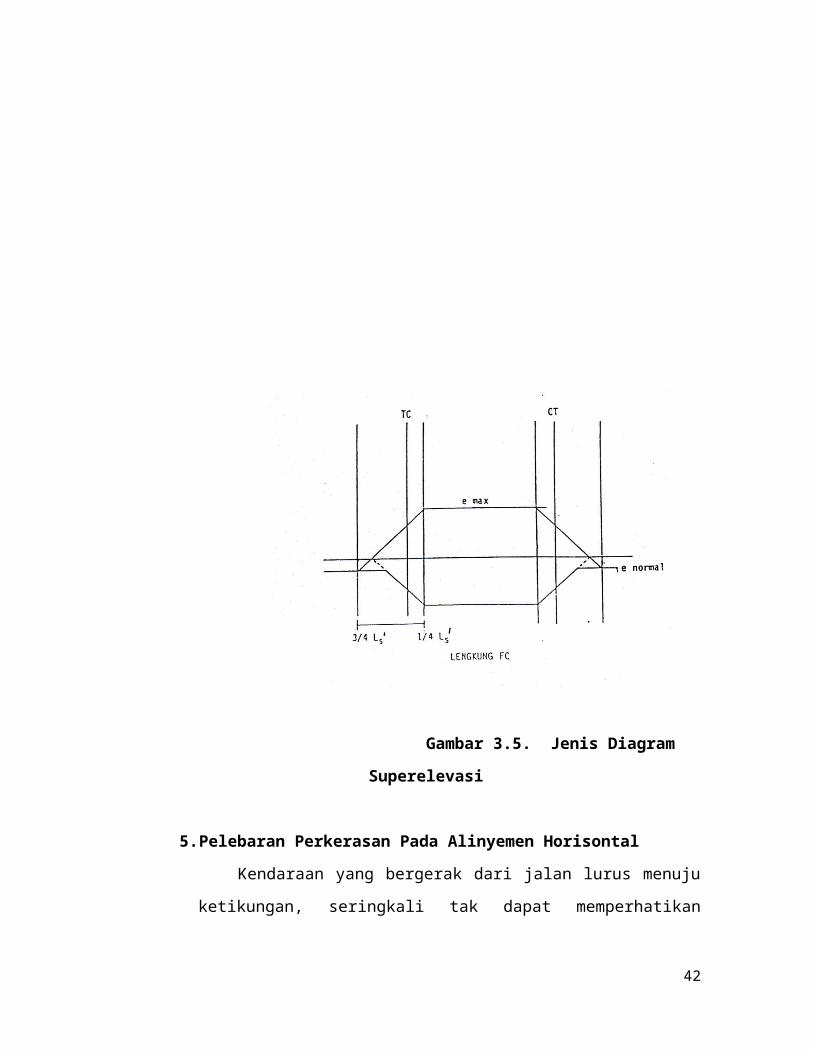
Gambar 3.5. Jenis Diagram Superelevasi
5. Pelebaran Perkerasan Pada Alinyemen Horisontal
37

Kendaraan yang bergerak dari jalan lurus menuju ketikungan, seringkali tak
dapat memperhatikan lintasanya pada jalur yang disediakan. Hal ini
disebabkan karena :
a. Pada waktu membelok yang diberi belokan pertama kali hanya roda
depan ,sehingga lintasan roda belakang agak keluar jalur (off tracking).
b. Jejak lintasan kendaraan tidak lagi berimpit, karena roda depan dan
belakang kendaraan akan mempunyai lintasan yang berbeda dengan
lintasan roda depan dan roda belakang kendaraan.
c. Pengemudi akan mengalami kesukaran dalam mempertahankan lintasan
tetap pada jalur jalannya terutama pada tikungan-tikungan yang tajam atau
pada kecepatan-kecapatan yang tinggi.
Untuk menghindari hal tersebut diatas maka pada tikungan-tikungan yang
tajam perlu perkerasan jalan diperlebar. Pelebaran perkerasan ini
merupakan factor dari jari-jari lengkung, kecepatan kendaraan, jenis dan
ukuran kendaraan rencana yang dipergunakan sebagai dasar perencanaan.
Pada umumnya truk tunggal merupakan jenis kendaraan yang
dipergunakan sebagai dasar penentuan tambahan lebar perkerasan yang
dibutuhkaan. Tetapi pada jalan-jalan dimana banyak dilewati kendaraan
berat, jenis keendaraan semi trailer merupakan kendaraan yang cocok
dipiliih untuk kendaraan rencana. Tentu saja pemilihan jenis kendaraan
rencana ini sangat mempengaruhi kebutuhan akan pelebaran perkerasan
dan biaya pelaksanaan jalan tersebut.
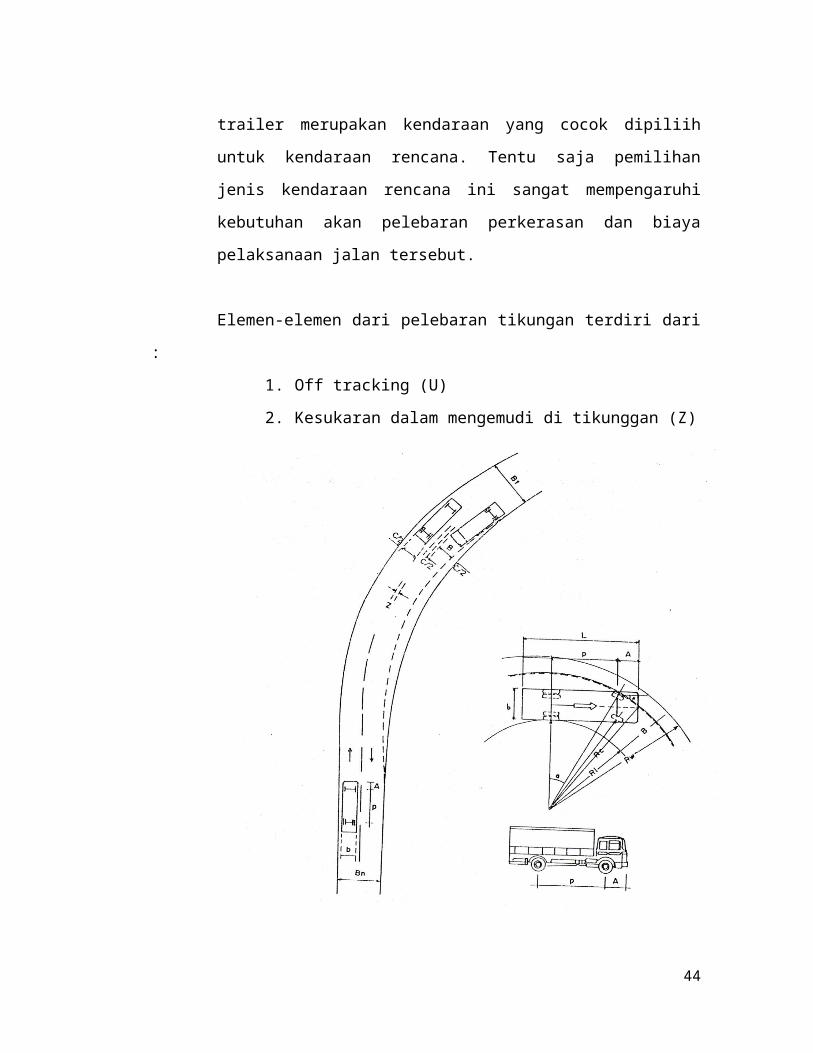
Elemen-elemen dari pelebaran tikungan terdiri dari :
1. Off tracking (U)
2. Kesukaran dalam mengemudi di tikunggan (Z)
38
Gambar 3.6. Pelebaran Perkerasan Pada Tikungan
Dari Gambar 3.5 dapat dilihat :
b = Lebar kendaraan rencana
B = Lebar perkerasan yang ditempat satu kendaraan ditikungan pada lajur
sebelah dalam
U = B-b
C = Lebar kebebasan samping dikiri dan kanan kendaraan
Z = Lebar tambahan akibat kesukaran mengemudi ditikungan
Bn = Lebar total perkerasan pada bagian lurus
Bt = Lebar total perkerasan ditikungan
N = Jumlah lajur
Bt = n(B+C)+Z
= Tambahan lebar perkerasan ditikungan
= Bt-Bn
39
1. Off Tracking(U)
Untuk perencanaan geometri jalan antar kota, Bina Marga
memperhitungkan lebar B dengan mengambil posisi kritis kendaraan yaitu
pada saat roda depan kendaraan pertama kali dan tinjauan dilakukan untuk
lajur sebelah dalam.
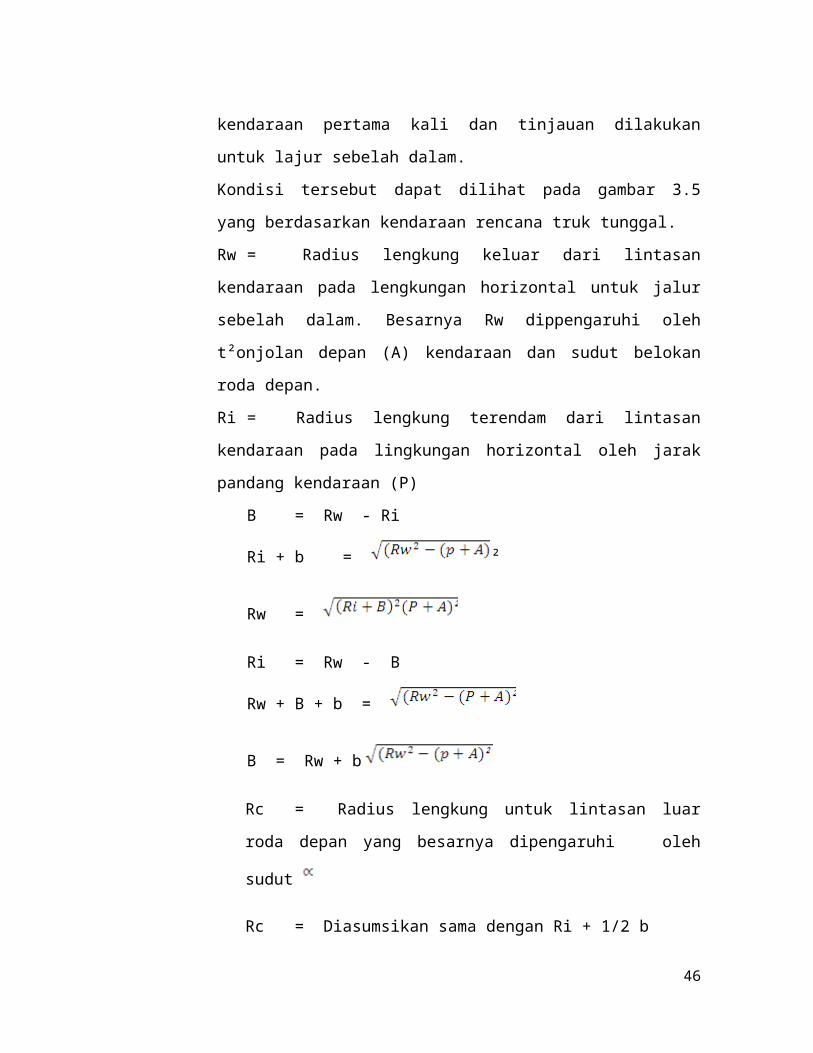
Kondisi tersebut dapat dilihat pada gambar 3.5 yang berdasarkan kendaraan
rencana truk tunggal.
Rw = Radius lengkung keluar dari lintasan kendaraan pada lengkungan
horizontal untuk jalur sebelah dalam. Besarnya Rw dippengaruhi oleh
t²onjolan depan (A) kendaraan dan sudut belokan roda depan.
Ri = Radius lengkung terendam dari lintasan kendaraan pada lingkungan
horizontal oleh jarak pandang kendaraan (P)
B = Rw - Ri
Ri + b = ²
Rw =
Ri = Rw - B
Rw + B + b =
B = Rw + b
Rc = Radius lengkung untuk lintasan luar roda depan yang
besarnya dipengaruhi oleh sudut
Rc = Diasumsikan sama dengan Ri + 1/2 b
Rc² = (Ri + 1/2)² + (P + A)²
(Ri + 1/2 b)² = Rc² - (P + A)²
(Ri + 1/2 b) =
40
Ri = -(P+A)²-1/2 b
Rw =
B =
U = B - b, sedangkan ukuran kendaraan rencana truk adalah
P = Jarak antara gandar = 6,5 m
A = Tonjolan depan kendaraan = 1,5 m
B = Lebar kendaraan = 2,5 m
Sehingga :
B = - + 1,25
Dan Rc = Radius lajur sebelah dalam - 1/2 lebar perkerasan + 1/2 b
2. Kesukaran Dalam Mengemudi di Tikungan
Tambahan lebar perkerasan akibat kesukaran dalam mengemudi ditikungan
diberikan oleh AASHTO sebagai fungsi dari kecepatan dan radius sebelah
dalam. Semakin tinggi kecepatan kendaraan dan semakin tajam tikungan
tersebut, semakin besar tambahan perlebaran akibat kesukaran dalam
mengemudi. Hal ini disebabkan oleh kecenderungan terlemparnya
kendaraan kearah luar dalam gerakan menikung tersebut.
41
Z = (0.105V) / VR
Dimana : V = Kecepatan, km/jam
R = Radius lengkung, m
Kebebasan samping dikiri dan kanan jalan tetap harus dipertahankan demi
keamanan dan tingkat pelayanan jalan. Kebebasan samping (C) sebesar 0,5
m, 1 m, dan 1,25 m cukup memadai untuk jalan dengan lebar lajur 6 m, 7
m, dan 7,50 m.
3. Pencapaian Pelebaran Pada Lengkung Horisontal
Pelebaran pada lengkung horizontal harus dilakukan perlahan-lahan dari
awal lingkungan kebentuk lengkungan penuh dan sebaliknya, hal ini
bertujuan untuk memberikan bentuk lintasan yang baik bagi kendaraan
yang hendak memasuki lengkungan atau meninggalkannya.
Pada lengkung-lengkung lingkaran sederhana, tanpa lengkung peralihan
pelebaran perkerasan sederhana, tanpa lengkung peralihan pelebaran
perkerasan padat dilakukan disepanjang lengkunan peralihan fiktif, yaitu
bersamaan dengan tempat perubahan kemiringan melintang.
Pada lengkung-lengkung dengan lengkung peralihan tambahan lebar
perkerasan dilakukan seluruhnya disepanjang lengkung peralihan tersebut.
E. Perencanaan Alinyemen Vertikal
Perubahan dari suatu kelandaian kelandaian yang lain diperhitungkan dengan
menggunakan lengkung vertikal.
1. Macam-macam Lengkung Vertikal
Lengkung vertikal ada 2, macam yaitu :
42
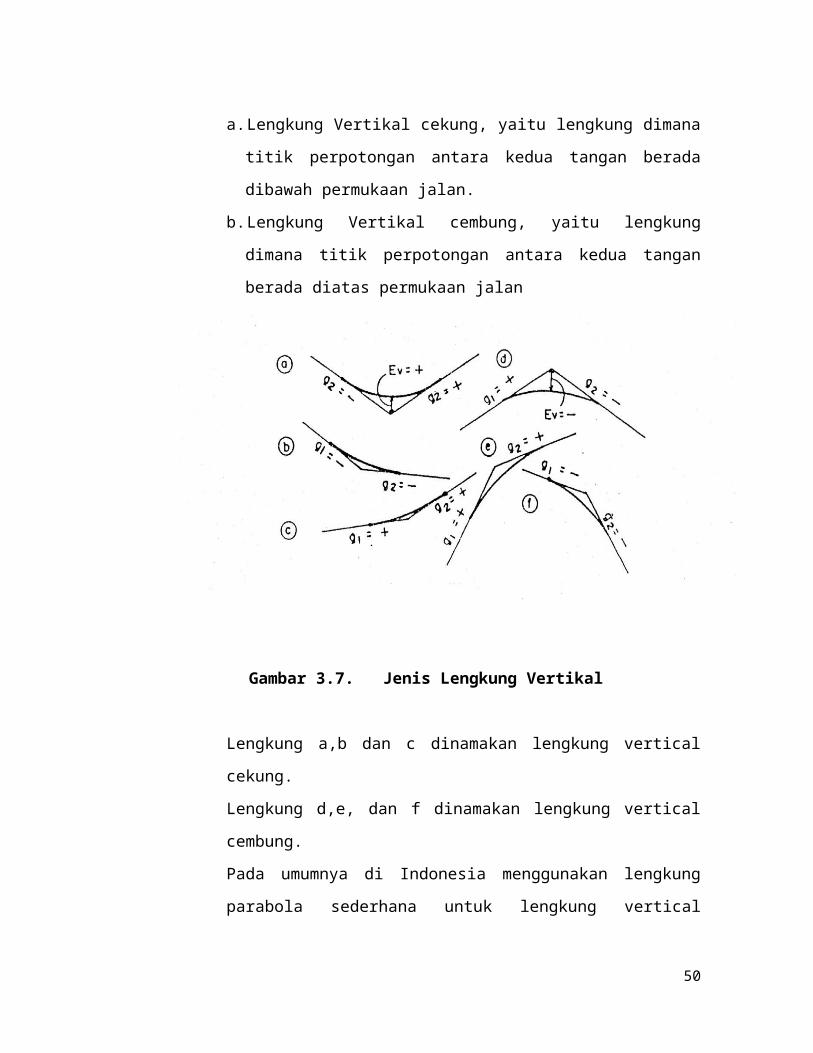
a. Lengkung Vertikal cekung, yaitu lengkung dimana titik perpotongan
antara kedua tangan berada dibawah permukaan jalan.
b. Lengkung Vertikal cembung, yaitu lengkung dimana titik perpotongan
antara kedua tangan berada diatas permukaan jalan
Gambar 3.7. Jenis Lengkung Vertikal
Lengkung a,b dan c dinamakan lengkung vertical cekung.
Lengkung d,e, dan f dinamakan lengkung vertical cembung.
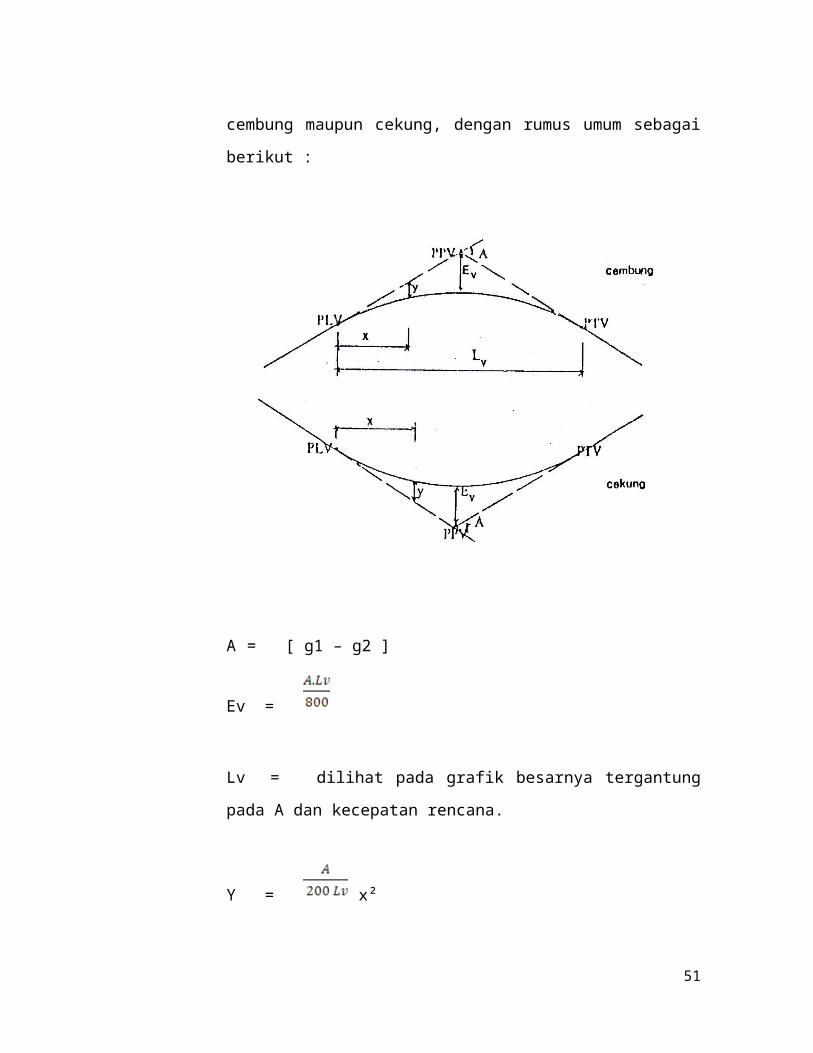
Pada umumnya di Indonesia menggunakan lengkung parabola sederhana
untuk lengkung vertical cembung maupun cekung, dengan rumus umum
sebagai berikut :
43
A = [ g1 – g2 ]
Ev =
Lv = dilihat pada grafik besarnya tergantung pada A dan kecepatan
rencana.
Y = x²
Dimana :
Ev = Pergeseran vertikal (m)
X = Jarak horizontal dari setiap titik pada garis kelandaian terhadap PLv
(peralihan lengkung vertical)
Y = Panjang pergeseran vertical dari titik yang bersangkutan
Lv = Jarak horizontal antara PLV dan PTV (peralihan tangen vertikal)
disebut panjang lengkung
A = Perbedaan panjang landai (%)
2. Kelandaian Maksimum dan Panjang Kritis
44

Sebelum menghitung alinyemen vertical ada beberapa tahapan yang perlu
diperhatikan.
a. Menentukan kelandaian memanjang jalan, pada tahapan ini yang perlu
diperhatikan adalah jumlah galian harus sedikit lebih besar
dibandingkan dengan jumlah volume timbunan. Tetapi selain itu juga
harus mmemperhatikan kelandaian maksimum, yaitu kelandaian
terbesar yang diperbolehkan pada suatu kelas jalan dan kondisi medan
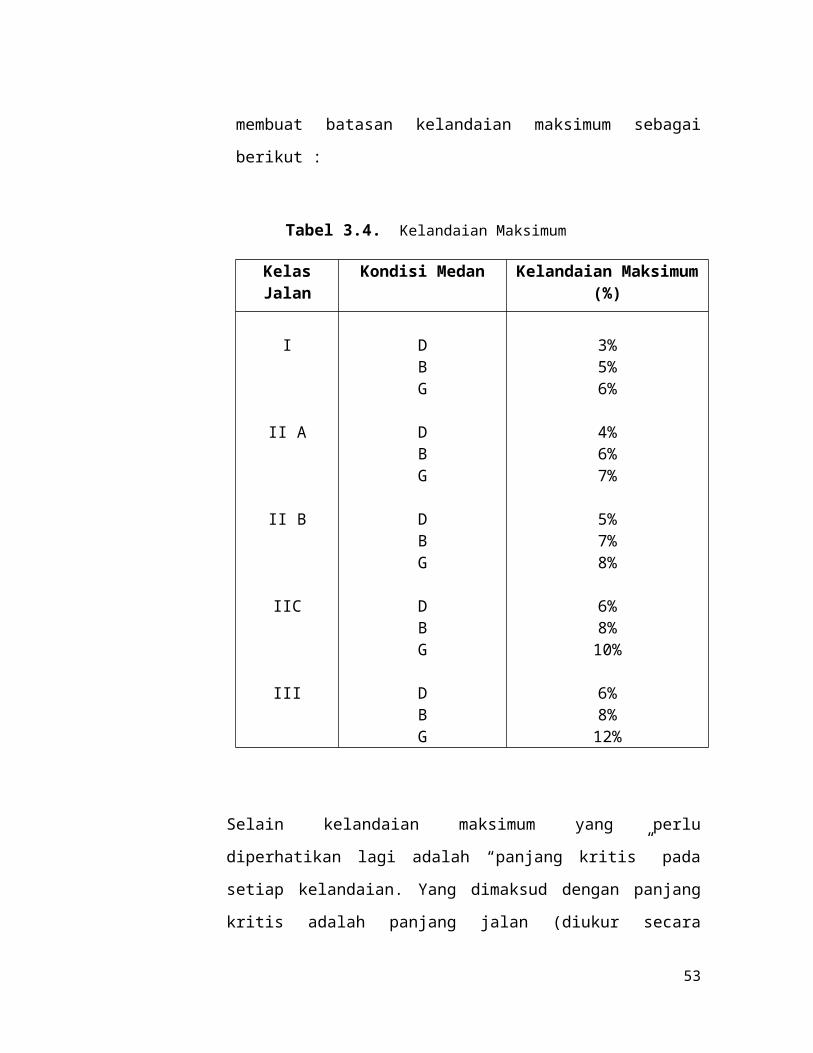
tertentu. Dirjen Bina Marga telah membuat batasan kelandaian
maksimum sebagai berikut :
Tabel 3.4. Kelandaian Maksimum
Kelas Jalan Kondisi Medan Kelandaian Maksimum (%)
I
II A
II B
IIC
III
DBG
DBG
DBG
DBG
DBG
3%5%6%
4%6%7%
5%7%8%
6%8%10%
6%8%12%
45
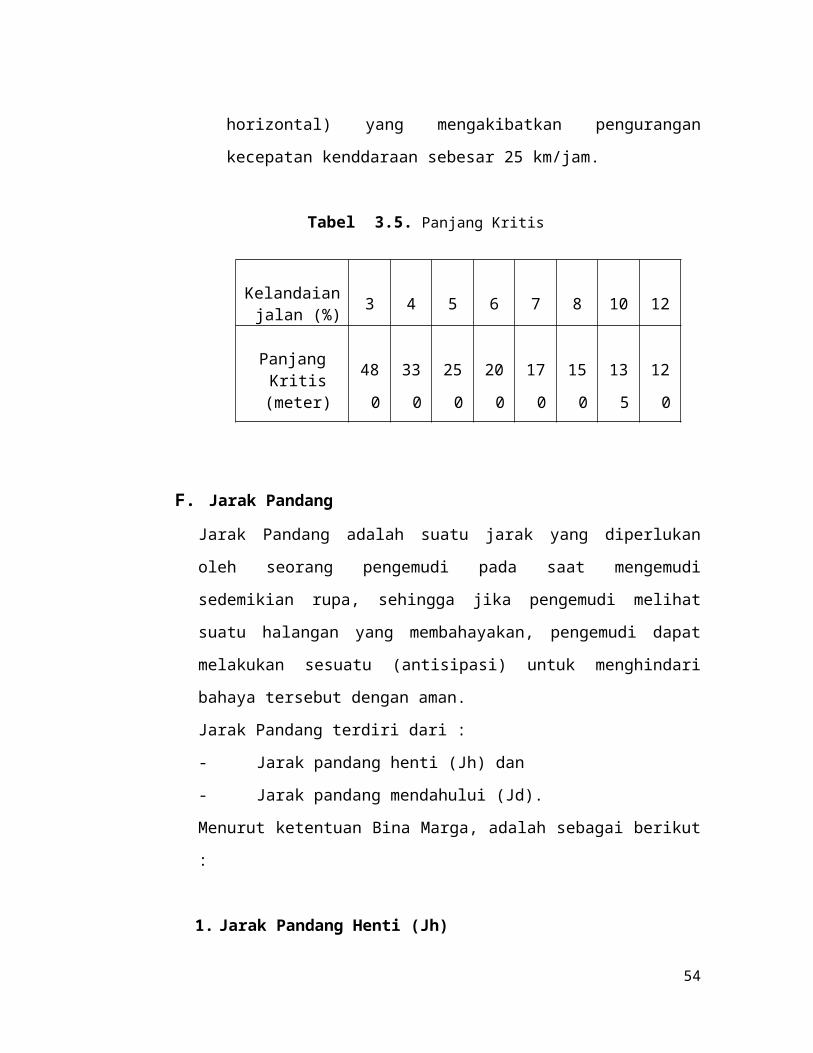
Selain kelandaian maksimum yang perlu diperhatikan lagi adalah
“panjang kritis” pada setiap kelandaian. Yang dimaksud dengan panjang
kritis adalah panjang jalan (diukur secara horizontal) yang mengakibatkan
pengurangan kecepatan kenddaraan sebesar 25 km/jam.
Tabel 3.5. Panjang Kritis
Kelandaian jalan (%)
3 4 5 6 7 8 10 12
Panjang Kritis
(meter)480 330 250 200 170 150 135 120
F. Jarak Pandang
Jarak Pandang adalah suatu jarak yang diperlukan oleh seorang pengemudi
pada saat mengemudi sedemikian rupa, sehingga jika pengemudi melihat
suatu halangan yang membahayakan, pengemudi dapat melakukan sesuatu
(antisipasi) untuk menghindari bahaya tersebut dengan aman.
Jarak Pandang terdiri dari :
- Jarak pandang henti (Jh) dan
- Jarak pandang mendahului (Jd).
Menurut ketentuan Bina Marga, adalah sebagai berikut :
1. Jarak Pandang Henti (Jh)
a. Jarak Minimum
Jh adalah jarak minimum yang diperlukan oleh setiap pengemudi untuk
menghentikan kendaraanya dengan aman begitu melihat adanya
halangan didepan. Setiap titik disepanjang jalan harus memenuhi
ketentuan Jh.
46

b. Asumsi Tinggi
Jh di ukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah
105 cm dan tinggi halangan 15 cm, yang diukur dari permukaan
jalan.
c. Elemen – Jh
Jh terdiri atas 2 (dua) elemen jarak, yaitu :
1). Jarak Tanggap (Jht), adalah jarak yang ditempuh oleh kendaraan
sejak pengemudi melihat suatu halangan yang menyebabkan ia
harus berhenti sampai saat pengemudi menginjak rem, dan
2). arak Pengreman (Jhr), adalah jarak yang dibutuhkan untuk
menghentikan kendaraan sejak pengemudi menginjak rem
sampai kendaraan berhenti.
d. Rumus Yang Digunakan :
Jh adalah suatu meter, dapat dihitung dengan rumus :
Jh = Jht + Jhr
Jh = T +
dimana :
VR = kecepatan rencana
T = waktu tanggap, ditetapakan 2,5 detik
g = percepatan grafitasi, ditetapkan 9,8 m/detik²
fp = koefisien gesek memanjang antara ban kendaraan dengan
perkerasan jalan aspal, ditetapkan 0,28 – 0,45
(menurut AASHTO), fp akan semakin kecil jika
kecepatan (VR) semakin tinggi dan sebaliknya.
(menurut Bina Marga, fp = 0,35 – 0,55)
47
Persamaan tersebut diatas dapat disederhanakan menjadi :
Untuk jalan datar :
Jh = 0,278 VR .T +
Untuk jalan dengan kelandaian tertentu :
Jh = 0,278 VR . T +
Dimana : L = landai jalan dalam (%) dibagi 100.
Tabel 5.1. Menampilkan panjang Jh minimum yang dihitung berdasarkan
persamaan dengan pembulatan-pembulatan untuk berbagi VR
Tabel 3.6. Jarak Pandang Henti (Jh) minimum
VR (km/jam) 120 100 80 60 50 40 30 20
Jh minimum (m) 250 175 120 75 55 40 27 16
2. Jarak Pandang Mendahului (Jd)
a. Jarak
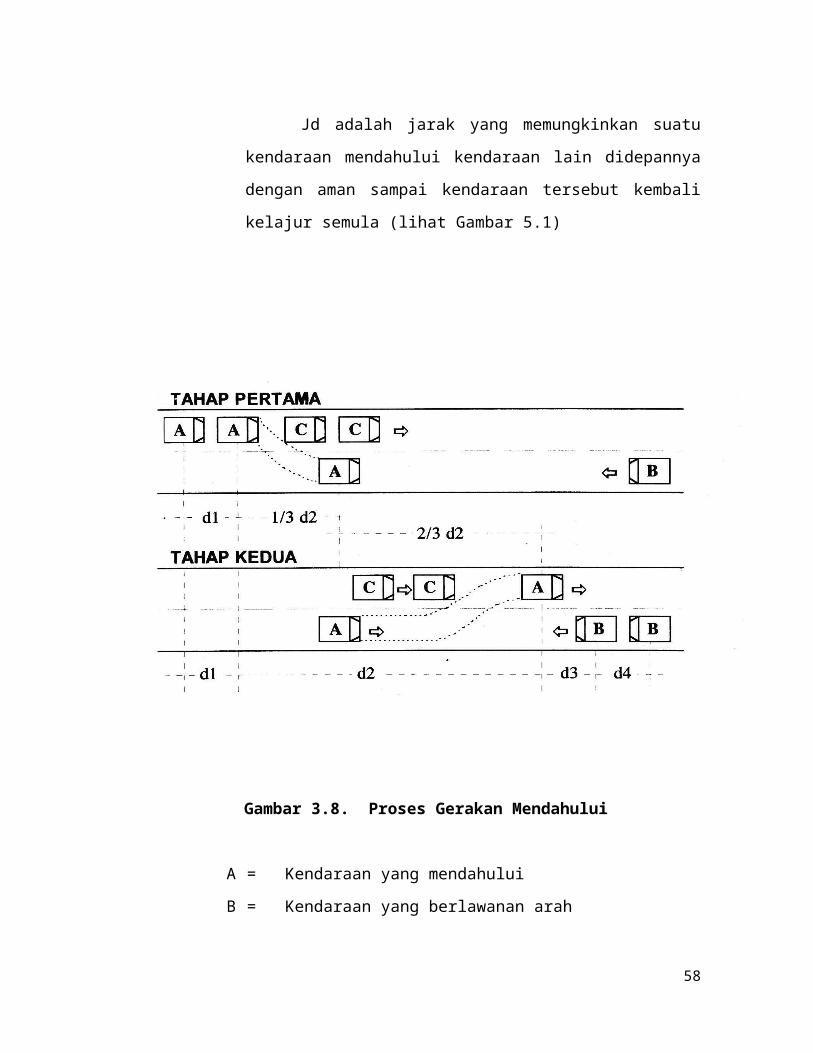
Jd adalah jarak yang memungkinkan suatu kendaraan mendahului
kendaraan lain didepannya dengan aman sampai kendaraan tersebut
kembali kelajur semula (lihat Gambar 5.1)
48
Gambar 3.8. Proses Gerakan Mendahului
A = Kendaraan yang mendahului
B = Kendaraan yang berlawanan arah
C = Kendaraan yang didahului kendaraan A
1. Asumsi Tinggi
Jd diukur berdasarkan asumsi bahwa tinggi mata pengemudi adalah
105 cm dan tinggi halangan adalah 105 cm.
2. Rumus Yang Digunakan
Jd, dalam satuan meter ditentukan sebagai berikut :
Jd = d1 + d2 + d3 + d4
dimana :
49
d1 = jarak yang ditempuh selama waktu tanggap (m)
d2 = jarak yang ditempuh selama mendahului sampai dengan kembali
kelajur semula (m),
d3 = jarak antara kendaraan yang mendahului dengan kendaraan yang
datang dari arah yang berlawanan setelah proses mendahului
selesai (m)
d4 = jarak yangditempuh oleh kendaraan yang dating dari arah
berlawanan.
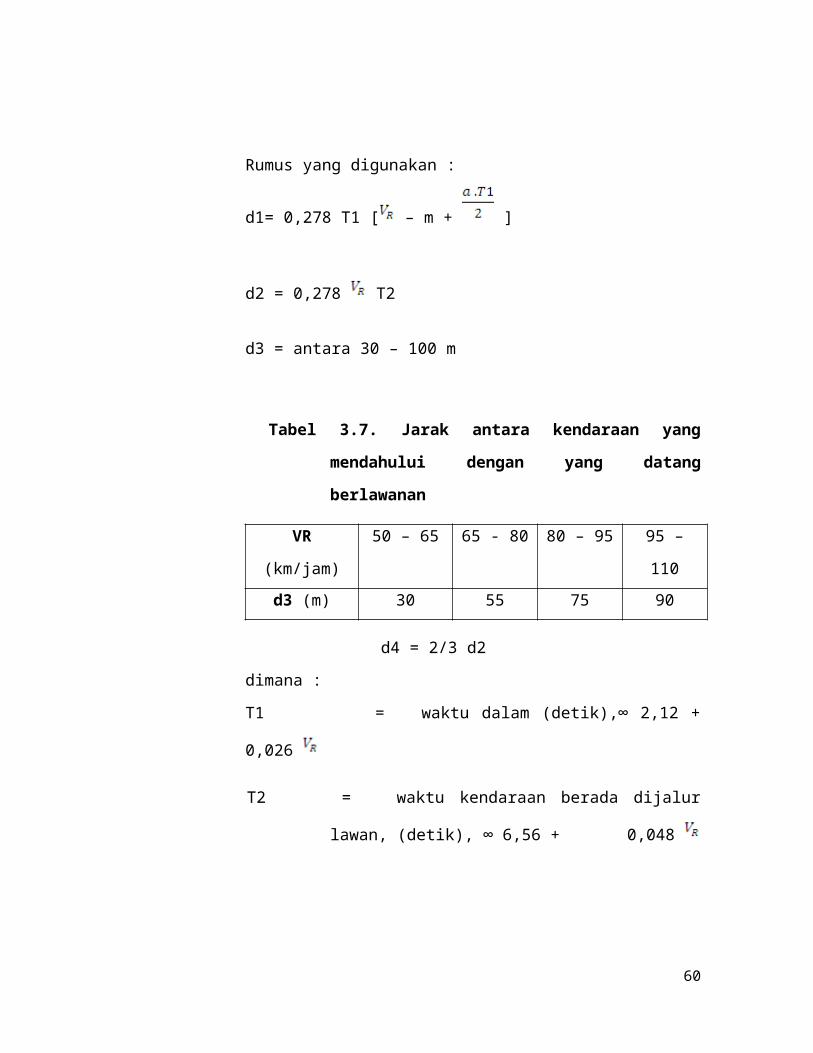
Rumus yang digunakan :
d1= 0,278 T1 [ – m + ]
d2 = 0,278 T2
d3 = antara 30 – 100 m
Tabel 3.7. Jarak antara kendaraan yang mendahului dengan yang
datang berlawanan
VR (km/jam) 50 – 65 65 - 80 80 – 95 95 – 110
d3 (m) 30 55 75 90
d4 = 2/3 d2
dimana :
T1 = waktu dalam (detik),∞ 2,12 + 0,026
T2 = waktu kendaraan berada dijalur lawan, (detik), ∞ 6,56 +
0,048
50
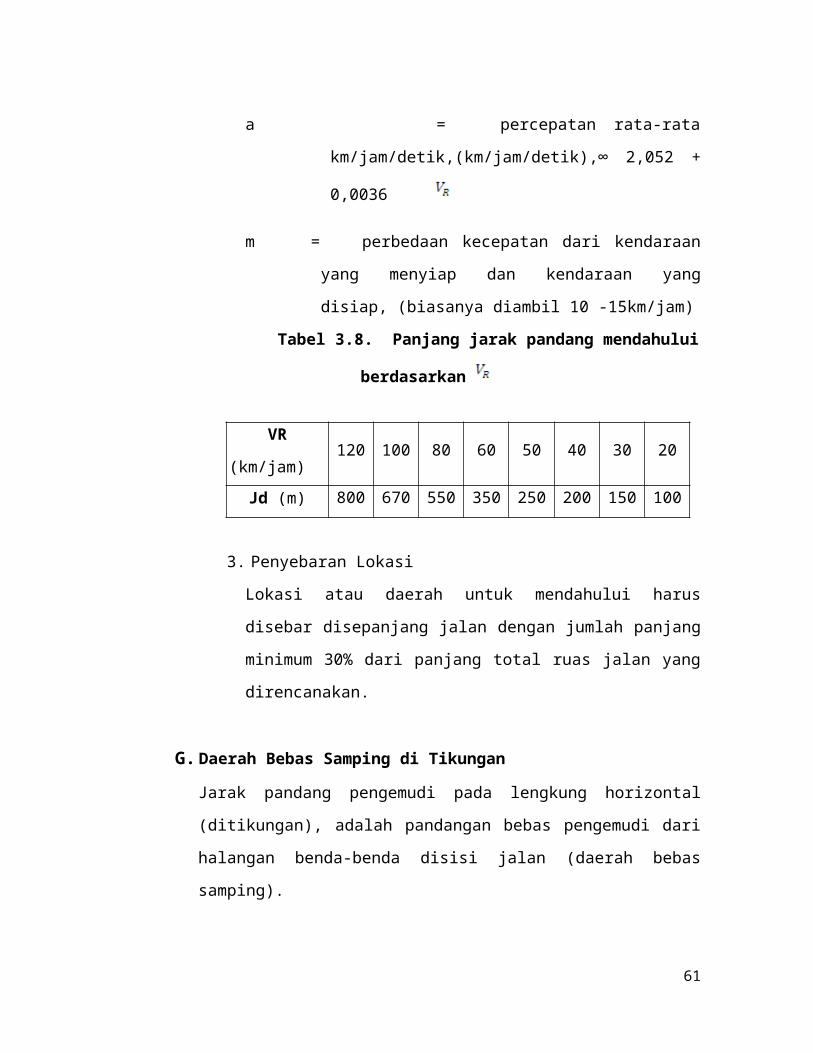
a = percepatan rata-rata km/jam/detik,(km/jam/detik),∞ 2,052 +
0,0036
m = perbedaan kecepatan dari kendaraan yang menyiap dan
kendaraan yang disiap, (biasanya diambil 10 -15km/jam)
Tabel 3.8. Panjang jarak pandang mendahului berdasarkan
VR (km/jam) 120 100 80 60 50 40 30 20
Jd (m) 800 670 550 350 250 200 150 100
3. Penyebaran Lokasi
Lokasi atau daerah untuk mendahului harus disebar disepanjang jalan
dengan jumlah panjang minimum 30% dari panjang total ruas jalan
yang direncanakan.
G. Daerah Bebas Samping di Tikungan
Jarak pandang pengemudi pada lengkung horizontal (ditikungan), adalah
pandangan bebas pengemudi dari halangan benda-benda disisi jalan (daerah
bebas samping).
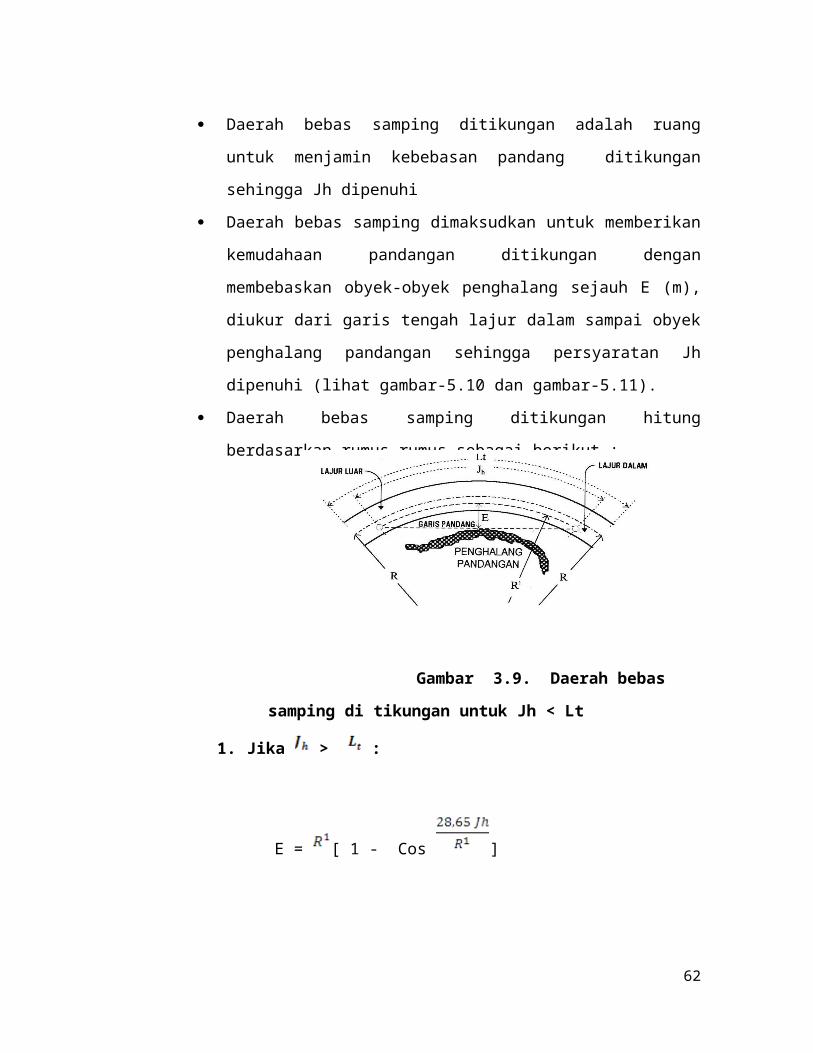
Daerah bebas samping ditikungan adalah ruang untuk menjamin
kebebasan pandang ditikungan sehingga Jh dipenuhi
Daerah bebas samping dimaksudkan untuk memberikan kemudahaan
pandangan ditikungan dengan membebaskan obyek-obyek penghalang
sejauh E (m), diukur dari garis tengah lajur dalam sampai obyek
penghalang pandangan sehingga persyaratan Jh dipenuhi (lihat gambar-
5.10 dan gambar-5.11).
Daerah bebas samping ditikungan hitung berdasarkan rumus-rumus
sebagai berikut :
51
Gambar 3.9. Daerah bebas samping di tikungan untuk Jh < Lt
1. Jika > :
E = [ 1 - Cos ]
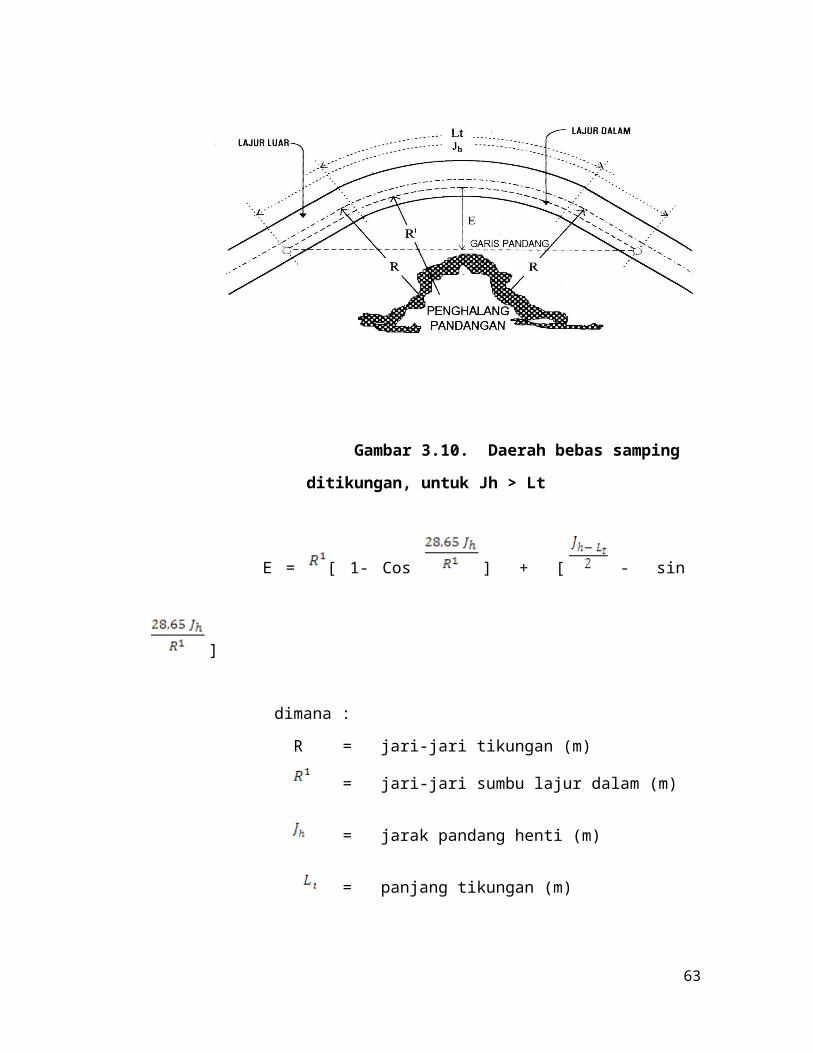
Gambar 3.10. Daerah bebas samping ditikungan, untuk Jh > Lt
E = [ 1- Cos ] + [ - sin ]
dimana :
R = jari-jari tikungan (m)
= jari-jari sumbu lajur dalam (m)
52
= jarak pandang henti (m)
= panjang tikungan (m)
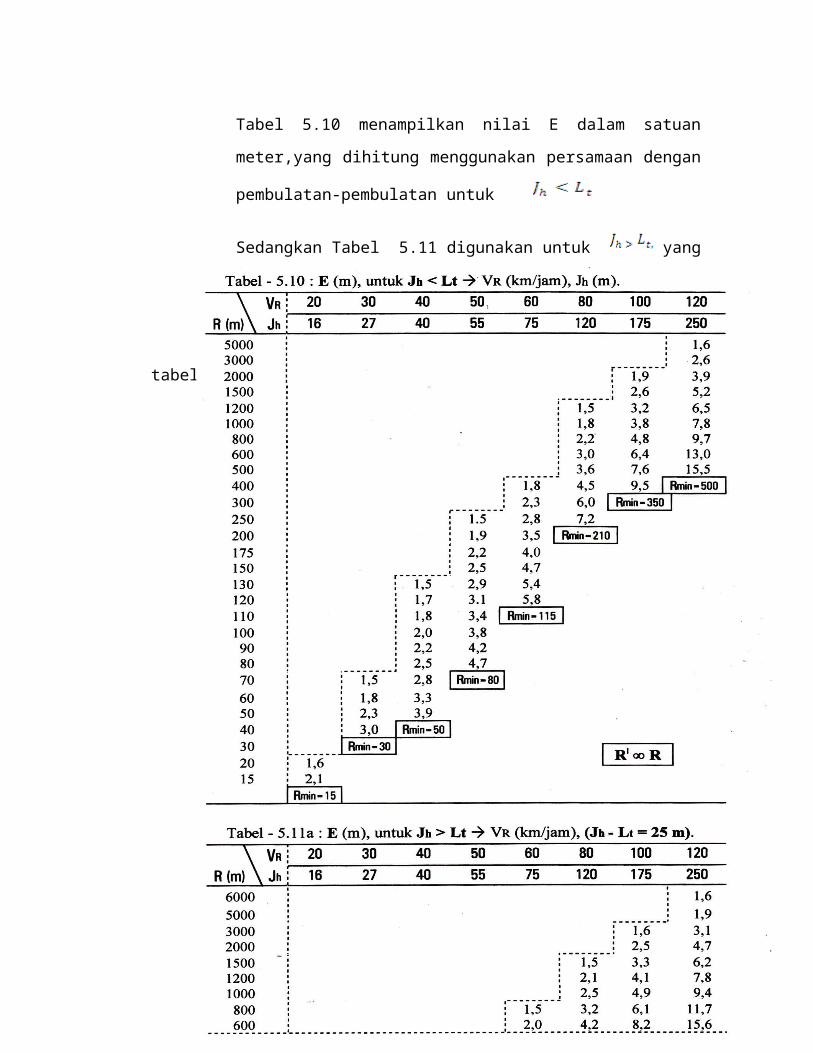
Tabel 5.10 menampilkan nilai E dalam satuan meter,yang dihitung
menggunakan persamaan dengan pembulatan-pembulatan untuk
Sedangkan Tabel 5.11 digunakan untuk yang dihitung dari
persamaan
Tabel 5.11a untuk ( = 25m) dan tabel 5.11b untuk ( = 50 m).
53
54
55
H. Tikungan Gabungan
Pada perencanaan alinyemen horizontal, kemungkinan akan ada/ditemui
perencanaan tikungan gabungan karena kondisi topografi pada route jalan
yang akan direncanakan sedemikian rupa sehingga terpaksa (tidak dapat
dihindari) harus dilakukan rencana tikungan gabungan searah dan tikungan
gabungan terbalik.
1. Tikungan Gabungan Searah
R1 > 1,5 R2 ---- Tikungan gabungan searah yang harus dihindari, jika
terpaksa dibuat tikungan gabungan dari dua busur lingkaran (FC)
disarankan seperti pada gambar dibawah (Gambar 5.12.a, b, c).
56
2. Tikungan Gabungan Berbalik
Tikungan gabungan yang berbalik secara tiba-tiba, harus dihindari, karena
dalam kondisi ini pengemudi sangat sulit untuk mempertahankan kendaraan
pada lajurnya. Jika terpaksa dibuat tikungan gabungan dari dua busur
lingkaran (FC), disarankan seperti pada gambar dibawah (Gambar 5.13a,b,c)
57
Tikungan gabungan yang berbalik, akan menemui kesukaran dalam pelaksanaan
(kontruksi) kemiringan melintang jalan, terutama pada kontruksi timbunan yang
tinggi, tikungan semacam ini sedapat mungkin harus dihindari.
I. Soal - Jawab
1. Jelaskan secara singkat apa yang dimaksud dengan :
- Kecepatan rencana
- Kecepatan batas
- Kecepatan jalan
Jawab :
- Kecepatan rencana adalah kecepatan yang dipilih untuk merencanakan
bagian-bagian dari jalan, misalnya : tikungan, kelandaian, jari-jari lengkung,
dsb. Apabila kendaraan melewati bagian jalan tertentu dan tidak melewati
kecepatan rencana, kendaraan harus aman (tidak terjadi kecelakaan).
Besarnya kecepatan rencana ditentukan berdasarkan klas jalan dan kondisi
medan.
- Kecepatan batas adalah kecepatan yang ditentukan untuk membatasi laju
kendaraan pada waktu memasuki ruas jalan tertentu. Biasanya kecepatan
58
rencana ditentukan sedikit lebih kecil dari kecepatan rencana, hal ini untuk
mengantisipasi kecenderungan manusia untuk melanggar.
- Kecepatan jalan adalah laju kendaraan rata-rata pada waktu melewati ruas
jalan tertentu. Kecepatan jalan dapat dihitung dengan cara membagi jarak
tempuh dengan waktu tempuh kendaraan. Kecepatan jalan biasanya
digunakan untuk mengetahui tingkat kinerja jalan tersebut.
2. Rencanakan sebuah lengkung horizontal, apabila diketahui sudut perpotongan
() = 44,33o, kecepatan rencana 60 km/jam.
Jawab :
Jari-jari minimum
R =
=
= 112,04 m
V = kecepatan rencana
e = kemiringan pada tikungan maksimum = 10 %
f = koefisien gesek , untuk V = 60 km/jam e = 0,153
Perencanaan lengkung horizontal menggunakan jenis spiral-circle-spiral
R min = 112,04 m dipakai R = 120 m
59
R = 120 dari tabel didapat :
V = 60 km/jam Ls = 70 m e = 0,099 m
Dari data Ls = 70 m dari tabel di dapat :
= 44,33o θs = 16,7160
k = 34,9013
x = 69,4078
p = 1,6961
y = 6,7627
Ts = ( R + p ) tg ½ + k
= ( 120 + 1,6961 ) tg 44,33 + 34,9013
= 84,44 m
Es = - R
= - 120
= 11,39 m
’ = - 2 θs
= 44,33 – 2 (16,7160)
= 10,88o
60
Lc = 2 π R
= 2 (3,14) (120)
= 22,77 m
Lt = Lc + 2 Ls
= 22,77 + 2 (70)
= 162,77 m
Kontrol :
1. Ls > Ls min
Ls min = 0,22 - 2,727
= 0,22 - 2,727
= 58,60 m
Ls > Ls min 70 > 58,60 m (OK !)
2. Lc > 20 m
22,77 > 20 m (OK !)
3. Lt < 2 Ts
61
162,77 < 2 (84,44)
162,77 < 168,88 (OK !)
3. Rencanakan sebuah lengkung vertical pada perubahan kelandaian dari +1,6%
ke +7%. Kecepatan rencana = 60 km/jam.
Perencanaan :
g1 = + 1,6% A = g1 – g2
g2 = + 7% = 1,6 – 7 = 5,4
Lengkung cekung
A = 5,4 dilihat dari grafik lengkung cekung
V = 60 km/jam didapat Lv = 75 m
Ev = = = 0,51 m
62
x1 = 15 m y1 = x2
= (15) 2
= 0,081 m
x2 = 30 m y2 = (30) 2
= 0,324 m
J. Soal - soal
1. Jelaskan secara singkat apa yang dimaksud dengan :
a. Kelandaian jalan
b. Pelebaran pada tikungan
c. Diagram superelevasi
2. Rencanakan sebuah lengkung horizontal pada ruas jalan yang akan
melayani Lalu lintas Harian Rata-rata = 4000 kendaraan perhari, kondisi
medan perbukitan, sudut potong () = 15o
63
3. Rencanakan sebuah lengkung vertical pada perubahan kelandaian dari +
2% menjadi - 1,5%. Lengkung tersebut berada pada jalan kelas II A
daerah perbukitan.
4. Gambarkan Diagram superelevasi untuk lengkung Full Circle, apabila
diketahui : lebar jalan 7 meter e maksimum = 3 % panjang lengkung (Lc)
= 100 meter
5. Jelaskan apa yang dimaksud dengan jarak pandang henti dan Jarak
pandang menyiap !
K. Referensi :
- Alik Ansyori Alamsyah, 2006, Rekayasa Jalan Raya, UMM Press, Malang
- Dirjen Binamarga Departemen Pekerjaan Umum, 1970, Peraturan Perencanaan Geometrik Jalan Raya, Badan penerbit PU, Jakarta
- Dirjen Binamarga Departemen Pekerjaan Umum, 1997, Tata Cara Perencanaan Geometrik Jalan Antar Kota, Badan penerbit PU, Jakarta
- Pemerintah Republik Indonesia, 2004, Undang-Undang Jalan ( UU RI No : 38 Tahun 2004 ), Sinar Grafika, Jakarta
- Pemerintah Republik Indonesia, 2006, Peraturan Pemerintah No : 34 Tahun 2006 Tentang Jalan. Jakarta
- Polytechnic Education Developmen Project, 1987,Konstruksi Jalan Raya I, Bandung
- Hendarsin Shirley L, 1987, Penuntun Praktis Perencanaan Teknik Jalan Raya, Politeknik Negeri Bandung - Jurusan Teknik Sipil, Bandung
- Sukirman Silvia, 1994, Dasar-dasar Perencanaan Geometrik Jalan , Nova, Bandung
64