BAB II MANIFOLD DIFFERENSIABEL - digilib.itb.ac.id · Koordinat polar dan koordinat stereografik...
14
4 BAB II MANIFOLD DIFFERENSIABEL 2.1 Definisi Manifold [13] Manifold adalah generalisasi dari ide-ide yang familiar tentang kurva dan permukaan pada ruang Euclidean. Sebuah kurva pada ruang Euclidean berdimensi tiga dapat diparameterisasi oleh suatu variabel tunggal, sebut saja sebagai , dan dua buah variabel dan dapat digunakan untuk memparameterisasi sebuah permukaan sebagai . Sebuah kurva dan permukaan dapat dianggap homeomorphic pada dan secara berurutan. Sebuah manifold, pada umumnya, homeomorphic pada secara lokal, tetapi bisa saja homeomorphic pada secara global. Apabila sebuah manifold homeomorphic secara lokal pada , kita dapat memberikan sebuah kumpulan bilangan pada setiap titik pada manifold sebagai koordinat lokal. Jadi bisa saja setiap titik pada manifold tersebut dapat memiliki dua koordinat atau lebih. Yang terpenting adalah transformasi antar koordinat harus smooth. Jadi sebenarnya hal yang paling esensial di dalam teori manifold adalah smoothness. Misalkan terdapat bola dengan jari-jari satuan pada ruang . Permukaan ini dapat diparametersisasi dengan beberapa kemungkinan koordinat, misalkan dengan sistem koordinat polar dan koordinat stereografik. Parameter pada koordinat polar dan didefinisikan oleh
Transcript of BAB II MANIFOLD DIFFERENSIABEL - digilib.itb.ac.id · Koordinat polar dan koordinat stereografik...

4
BAB II
MANIFOLD DIFFERENSIABEL
2.1 Definisi Manifold [13]
Manifold adalah generalisasi dari ide-ide yang familiar tentang kurva
dan permukaan pada ruang Euclidean. Sebuah kurva pada ruang Euclidean
berdimensi tiga dapat diparameterisasi oleh suatu variabel tunggal, sebut saja
sebagai , dan dua buah variabel dan dapat digunakan untuk
memparameterisasi sebuah permukaan sebagai . Sebuah
kurva dan permukaan dapat dianggap homeomorphic pada dan secara
berurutan. Sebuah manifold, pada umumnya, homeomorphic pada secara
lokal, tetapi bisa saja homeomorphic pada secara global. Apabila sebuah
manifold homeomorphic secara lokal pada , kita dapat memberikan sebuah
kumpulan bilangan pada setiap titik pada manifold sebagai koordinat lokal.
Jadi bisa saja setiap titik pada manifold tersebut dapat memiliki dua koordinat
atau lebih. Yang terpenting adalah transformasi antar koordinat harus smooth. Jadi
sebenarnya hal yang paling esensial di dalam teori manifold adalah smoothness.
Misalkan terdapat bola dengan jari-jari satuan pada ruang . Permukaan ini
dapat diparametersisasi dengan beberapa kemungkinan koordinat, misalkan
dengan sistem koordinat polar dan koordinat stereografik. Parameter pada
koordinat polar dan didefinisikan oleh

5
(2.1.1)

5
dimana berjalan dari sampai dan berjalan dari sampai . Mereka dapat
juga dicari dengan persamaan
(2.1.2)
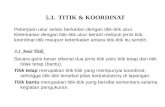
Gambar 1. Koordinat polar dan koordinat stereografik dari titik pada
lingkaran [13].
Koordinat stereografik adalah proyeksi dari Kutub Utara pada bidang
ekuatorial seperti ditunjukkan pada gambar 1. Pertama-tama tarik garis dari Kutub
Utara menuju titik pada lingkaran dan teruskan garis itu

6
menuju ke bidang ekuatorial . Garis itu akan berpotongan dengan bidang
ekuatorial pada titik . dan inilah yang disebut sebagai koordinat
titik dalam sistem koordinat stereografik. Melalui persamaan garis akan kita
dapatkan koordinat stereografik sebagai berikut
(2.1.3)
sedangkan hubungan antara koordinat polar dan koordinat stereografik adalah
(2.1.4)
Tentu saja koordinat polar dengan sumbu polar yang berbeda ataupun
proyeksi dari titik yang berbeda pada boleh digunakan. Pada teori tentang
manifold satu hal yang paling mendasar adalah bahwa semua sistem koordinat
sama. Hal ini tentu saja juga sesuai dengan prinsip dasar pada fisika yaitu sebuah
sistem fisis memiliki kelakuan yang sama pada setiap koordinat yang digunakan
untuk mengukurnya.
Hal lain yang bisa kita dapatkan dari contoh di atas adalah bahwa tidak
ada sistem koordinat yang dapat digunakan di setiap titik secara bersamaan.
Ambil contoh misalnya koordinat polar pada pada bidang ekuatorialnya. Jika
kita biarkan berjalan dari sampai maka akan berubah secara kontinu
sampai . Pada titik ini mempunyai diskontinuitas dari menuju dan
titik-titik yang berdekatan dengan titik tersebut memiliki nilai yang cukup jauh
berbeda. Jalan alternatif adalah kita dapat melanjutkan melampaui . Kalau
kita mengambil jalan ini maka kita akan menemukan kesulitan lain yaitu: pada
setiap titik kita harus memiliki nilai yang tak hingga banyaknya, berbeda antara

7
satu dengan yang lainnya dengan nilai sebesar kelipatan bilangan bulat dari .
Kesulitan yang lain juga muncul pada kutub. Pada titik ini tidak terdefinisi sama
sekali. Koordinat stereografik juga memiliki kesulitan pada Kutub Utara atau pada
titik proyeksi yang tidak diproyeksikan pada bidang ekuatorial; dan titik yang
berdekatan dengan Kutub Utara memiliki koordinat stereografik yang berbeda
cukup jauh.
Jadi kita tidak dapat menciptakan sebuah sistem koordinat tunggal yang
memenuhi kondisi berikut.
i. Setiap titik-titik yang berdekatan satu sama lain memiliki koordinat
yang berdekatan;
ii. Setiap titik memiliki koordinat yang unik.
Akan tetapi kita dapat menciptakan sebuah sistem koordinat yang
memenuhi kondisi berikut.
i. Setiap titik-titik yang berdekatan satu sama lain memiliki koordinat
yang berdekatan paling tidak pada satu sistem koordinat;
ii. Setiap titik memiliki koordinat yang unik pada setiap sistem
koordinat yang bersangkutan;
iii. Jika dua buah sistem koordinat saling overlap, maka mereka
terhubungkan satu sama lain secara smooth.
Tanpa ketiga syarat di atas, maka sebuah fungsi yang differensiabel pada
satu sistem koordinat belum tentu differensiabel pada sistem koordinat lain.
adalah sebuah manifold differensiabel berdimensi jika memenuhi
syarat-syarat berikut ini.

8
i. adalah sebuah ruang topologi;
ii. disajikan dalam bentuk pasangan ;
iii. adalah himpunan buka yang menutupi , yaitu .
adalah homeomorfisme dari pada suatu himpunan buka ; dan
iv. Jika dan memenuhi hubungan , maka pemetaan
dari menuju adalah
differensiabel.

9
Gambar 2. Sebuah homeomorfisme memetakan pada subhimpunan buka
, memberikan koordinat pada sebuah titik . Jika , transisi dari
satu koordinat menuju koordinat lain adalah smooth.
Pasangan dinamakan chart sedangkan himpunan chart, yaitu
dinamakan atlas. Subset disebut coordinate neighbourhood.
Homeomorfisme direpresentasikan sebagai fungsi-
. Himpunan sering disebut juga sebagai
koordinat. Jika dan saling overlap, maka aksioma iv. mensyaratkan bahwa
transisi dari suatu sistem koordinat menuju sistem koordinat yang lain harus

10
smooth . Pemetaan memetakan setiap koordinat pada
sebuah titik , dan pemetaan memetakan pada titik
yang sama dan transisi dari menuju , , diberikan oleh buah
fungsi dengan buah variabel. Transformasi koordinat adalah
bentuk eksplisit dari pemetaan . Sehingga differensiabilitas, seperti
yang telah diketahui dalam dasar kalkulus, yaitu transformasi koordinat adalah
differensiabel apabila setiap fungsi differensiabel. Kita dapat saja
membatasi differensiabilitas sampai pada orde ke- . Bagaimanapun, tentu
saja pembatasan ini tidak menghasilkan kesimpulan apa-apa. Kita hanya
memerlukan persyaratan bahwa transformasi koordinat differensiabel secara
infinit, yaitu .
Jika gabungan dari dua buah atlas, yaitu dan juga
adalah sebuah atlas, kedua atlas ini disebut compatible. Kompatibilitas adalah
relasi ekivalen, relasi ekivalen yang menunjukkan kompatibilitas disebut
differentiable structure. Dan juga atlas yang kompatibel menunjukkan
differentiable structure yang sama pada .
2.2 Manifold Differensiabel
Konsep manifold differensiabel diperlukan untuk menerapkan metode
dari kalkulus differensial pada ruang yang lebih umum dari . Contoh dari
sebuah manifold differensiabel adalah permukaan regular pada . Sebuah subset
adalah sebuah permukaan regular jika, untuk setiap titik terdapat

11
sebuah lingkungan di sekitar dan sebuah pemetaan
dari sebuah himpunan buka pada , sedemikian sehingga:
i. adalah homeomorfisme yang differensiabel;
ii. Differensial adalah injektif untuk semua .
Pemetaan disebut parameterisasi dari pada titik . Hasil yang paling
penting dari definisi mengenai permukaan regular adalah fakta bahwa transisi dari
satu parameterisasi ke parameterisasi lain adalah diffeomorfisme. Yaitu jika
dan adalah dua parameterisasi sedemikian sehingga
, maka pemetaan dan
adalah differensiabel. Maka secara intuitif sebuah
permukaan regular adalah gabungan dari himpunan buka di , sedemikian rupa
sehingga ketika dua himpunan buka beririsan satu sama lain transisi dari
himpunan buka yang satu ke himpunan buka yang lain adalah differensiabel,
sebagai akibatnya maka dapat diterapkan kalkulus.
Definisi 2.4.1 Sebuah manifold differensiabel berdimensi adalah sebuah
himpunan dan kumpulan pemetaan injektif dari himpunan
buka ke sedemikian sehingga:
i. ;

12
ii. Untuk suatu , dengan , himpunan
dan adalah himpunan buka di dan pemetaan
adalah differensiabel (gambar 4).
Gambar 3. Hubungan antara dan .
Definisi 2.4.2 Misalkan dan adalah manifold differensiabel. Sebuah
pemetaan adalah differensiabel pada titik jika diberikan
parameterisasi pada titik terdapat sebuah parameterisasi

13
pada titik sedemikian sehingga dan
pemetaan
adalah differensiabel pada (gambar 5). adalah differensiabel pada
himpunan buka pada jika differensiabel pada setiap himpunan buka
ini.
Gambar 4. Keterdifferensialan pada pemetaan antar manifold.
2.3 Ruang Tangen

14
Selanjutnya, kita akan mengembangkan ide mengenai vektor tangen
pada manifold differensiabel. Untuk permukaan pada , sebuah vektor tangen
pada sebuah titik pada permukaan didefinisikan sebagai “kecepatan” pada
dari sebuah kurva yang melewati titik . Kita harus menemukan karakteristik dari
vektor tangen yang akan mensubstitusikan ide mengenai “kecepatan”. Misalkan
adalah differensiabel pada , dengan . Tulis
(2.3.1)
Jadi . Sekarang misalkan fungsi
differensiabel yang didefinisikan pada lingkungan di . Kita akan
mengkomposisikan dengan dan mengekspresikan turunan berarahnya dalam
bentuk vektor sebagai
(2.3.2)
Jadi, turunan berarah yang diekspresikan dalam bentuk vektor bergantung
secara unik pada . Ini adalah karakteristik yang akan digunakan untuk
mendefinisikan vektor tangen pada sebuah manifold.
Definisi 2.5.1 Misalkan adalah manifold differensiabel. Sebuah fungsi
differensiabel disebut kurva pada . Misalkan ,
dan misalkan adalah himpunan funsi pada yang differensiabel pada titik .
Vektor tangen pada kurva pada adalah fungsi diberikan
oleh

15
(2.3.3)
Sebuah vektor tangen pada adalah vektor tangen pada pada suatu kurva
dengan . Himpunan dari semua vektor tangen pada
pada akan dinotasikan sebagai .
Jika kita memilih parameterisasi pada , kita dapat
mengekspresikan fungsi dan kurva dalam parameterisasi ini sebagai
(2.3.4)
(2.3.5)
didapatkan
.
Dalam kata lain, vektor dapat diekspresikan dalam parameterisasi sebagai
(2.3.6)

16
Gambar 5. Vektor tangen dari sebuah titik pada .
Ekspresi menunjukkan vektor tangen terhadap kurva
pada hanya bergantung pada turunan dalam suatu sistem koordinat. ,
dengan operasi yang biasa dilakukan pada fungsi akan membentuk ruang vektor
berdimensi , dan pilihan parameterisasi menunjukkan basis
yang bersangkutan pada (gambar 6). Ruang vektor
disebut ruang tangen dari pada titik .