Automotive Radar in Indonesian
57
Moh. Ali Fauzi (14050514061) Atika Jihan Sadida (14050514062) Penggunaan Radar dalam Bidang Otomotif sebagai Upaya Meningkatkan Keselamatan
-
Upload
moh-ali-fauzi -
Category
Education
-
view
73 -
download
6
Transcript of Automotive Radar in Indonesian

Moh. Ali Fauzi (14050514061)Atika Jihan Sadida (14050514062)
Penggunaan Radar dalam Bidang Otomotif sebagai
Upaya Meningkatkan Keselamatan

2
RADAR OTOMOTIF (AUTOMOTIVE RADAR)

Konten IsiRadar dalam Bidang Otomotif
A. Mobil (Roda Empat) Sejarah Singkat Peralatan pada Radar Otomotif Metode Pengukuran Jarak Objek Aplikasi Radar Otomotif Fitur Autopilot Kesimpulan
B. Sepeda Motor (Roda Dua)
Motorcycle Radar Detector
3

4
Sejarah SingkatSecara garis besar, tahun 1970-an menjadi awal dari
penciptaan radar di bidang otomotif (mobil). Salah satunya, pada tahun 1970 perusahaan bernama VDO memperkenalkan sebuah radar 10 GHz yang terpasang pada mobil. Berselang 4 tahun berikutnya perusahaan AEG-Telefunken memperkenalkan radar 35 GHz, dan setahun berikutnya perusahaan SEL (Standard Electric Lorenz) memperkenalkan radar dengan frekuensi 16 GHz.

5
10 GHz automotive radar system built by VDO in the early 1970s
35 GHz automotive radar system built by AEG-Telefunken in 1974
16 GHz automotive radar system built by Standard Electric Lorenz (SEL) in 1975

Year Car-Company Radar-Manufacturer
1970 ? VDO
1974 ? Telefunken
1975 ? SEL
1996 Frightliner VORAD
1997 Chrysler VORAD
1998 Mercedes-Benz Millitech
1998/99 BW VDO/HIT
1998/99 Volvo Celcius/Philips
1998/99 Opel (GM) ?
1998/99 Volkswagen VDO/HIT/Rockwell6

7
Pada awalnya, radar digunakan untuk mendeteksi objek di sekitar mobil (mobil, truk, sepeda motor, pejalan kaki) pada jarak yang relatif dekat. Namun seiring dengan perkembangan teknologi, radar juga bisa digunakan untuk mendeteksi objek pada jarak yang jauh.
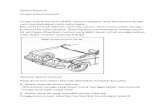
Configuration schematic of DISTRONIC PLUS, where orange is a 77 GHz LRR-sensor and green is a 24 GHz SRR-sensor (Source: Daimler AG, Stuttgart, Germany).

8
Peralatan pada Radar OtomotifAntena
Untuk menangkap sinyal serta memberikan suara dan gambar pada radio dan televisi.
KameraUntuk memonitor lalu lintas pada jarak jauh dan sebagai bantuan penglihatan saat parkir.
RadarBerupa radar monostatik (radar yang bisa memancarkan dan menerima sinyal informasi). Digunakan untuk mendeteksi objek di sekitar mobil.

9
Pr : The Received Power.Pt : The Transmitted Power.Lsys : Rugi-rugi dari sistem.R : Jarak obyek dari sumber.
: Gr,Gt : Gain receiver dan transmitter. : panjang gelombang.
9

10
RADAR CROSS SECTION
Mazda 6 Mono-static RCS
- Radar cross-section (RCS) adalah bentuk pengukuran tentang bagaimana suatu objek dideteksi oleh radar. Semakin besar nilai RCS, maka objek akan lebih mudah dideteksi.
10

Metode Pengukuran JarakPropagasi Langsung (Efek Doppler)
Metode pertama yaitu dengan propagasi langsung dengan mengukur delay (beda waktu) pada saat penerimaan sinyal yang dikorelasikan dengan jarak objek yang mencerminkan / merepresentasikan objek sebagai suatu fungsi kecepatan cahaya dan periode (transmisi gelombang) atau sebaliknya.
11

;
12

• FMCW (Frequency Modulated Continous Wave)
Metode kedua yaitu dengan propagasi secara tidak langsung yaitu dengan Frequency Modulated Continuous Wave (FMCW). Untuk propagasi secara tidak langsung, proses modulasi terjadi dalam dua tahap (pengiriman dan penerimaan sinyal). Perbedaan frekuensi dari kedua proses tadi dapat digunakan untuk menentukan jarak dan kecepatan relatif pada objek.
-
13

14

Aplikasi Radar pada Mobil
15

Berdasarkan jarak jangkauannya, pendeteksian radar pada objek diklasifikasikan menjadi dua, yaitu secara SRR dan LRR.
SSR (Short Range Radar) (). LRR (Long Range Radar) ().
16

17
SRR dan LRR Sensors
17

• Long Range Radar – LRR• 55 dBm transmit power• 10 – 250 m Range• Range Resolution: 0.25 m• Narrow Beam Looking
Ahead: ACC
• Short Range Radar – SRR• -9 dBm/Hz transmit power• 15cm – 30m Range• Range Resolution: 3.75 cm• Parking Aid, Close
Proximity to Vehicle
Medium Range Radar – MRR -9 dBm/Hz transmit power 77-81 GHz Band with 600
MHz BW 1-100 m Range Range Resolution: 0.25 m Medium Distance: CTA
18

Aplikasi Radar Radar Cruise Control Side
Impact Blind Spot Detection Parking Assist Lane Departure Alert Lane Keeping Assist Pre-Collision / Pre-Crash Collision Warning Notify Pedestrian
19

RADAR CRUISE CONTROL
20

21
RADAR CRUISE CONTROL (Membuat perjalanan jauh lebih mudah dan mengurangi tingkat
kelelahan dengan menjaga jarak dengan kendaraan di depannya).
Ketika mobil berada pada kecepatan tertentu, sistem akan mempertahankan jarak antar kendaraan lain, sehingga pengemudi tidak bersusah payah mengatur jarak aman pada mobilnya. Sistem ini beroperasi pada hampir semua tingkat kecepatan (memungkinkan deteksi objek pada kecepatan rendah). Pada akhirnya, sistem akan mengurangi tingkat kelelahan sopir bahkan dalam kemacetan lalu lintas.
Sistem ini memiliki tiga kondisi, diantaranya:

22
[1] Cruise control at preset speeds
Mobil akan melaju pada kecepatan konstan sesuai dengan tingkat kecepatan yang telah ditentukan.

23
[2] Control of deceleration cruising and follow-up cruising
Dengan menyesuaikan kecepatan dengan kendaraan sebelumnya (di depan), maka sistem akan mempertahankan jarak aman sambil memperlambat laju mobil (tergantung kecepatan objek).

24
[3] Acceleration speed control
Sebuah sensor (kamera and millimeter-wave radar) mendeteksi objek ketika bergerak masuk dan keluar jalur. Sistem akan menambahkan kecepatan saat dirasa objek di depannya sudah aman.

25
[4] Stop maintenance control (when all-speed cruise control is available in system)
Sistem akan menurunkan atau bahkan menghentikan laju mobil ketika objek di depannya sedang mengerem atau berhenti. Ketika objek mulai bergerak maju, sistem akan menggerakkan mobil sampai pada kecepatan yang ditentukan.
Sensor Stop
Sensor Go

26
Videos:
Dynamic Radar Cruise Control

27
Blind Spot Detection

28
(Teknologi mobil dapat melihat area yang tidak bisa dijangkau mata)
Digunakan untuk melihat objek lain saat objek berada di titik buta. Dengan menggunakan ultrasonik untuk mendeteksi objek yang dekat dan mengamati data dari kamera video.

29
Saat objek mendekat, sistem akan memberi peringatan dengan cara lampu berkedip di sisi samping mobil dan kemudian ada bunyi bip atau getaran pada kemudi.
Blind spot detection adalah sebuah sistem teknologi elektronik yang dapat memberikan cakupan area 360 derajat pada mobil saat kecepatan anda tinggi maupun rendah.
Video: How to Blind Spot Monitor 1
How to Blind Spot Monitor 2

Lane Departure Alert
30

Lane Departure Alert (LDA)
(Mengingatkan pengemudi saat menyimpang dari jalur).
Sistem ini akan memberitahu dan memperingatkan pengemudi ketika mobilnya menyimpang dari jalur yang semestinya.
31

32
[1] Lane DetectionSaat mobil berjalan, kamera akan mendeteksi garis kuning
dan putih terhadap posisi mobil.
[2] Alertketika mobil mulai meninggalkan jalur tanpa mengaktifkan
lampu berbelok (lampu sein), maka pengemudi juga akan diperingatkan sistem dengan peringatan audio dan visual.
How Lane Departure Alert Working

33
Lane Keeping Assist

Lane Keeping Assist
34
Teknologi ini didesain untuk memperingatkan pengemudi ketika mobil bergerak menyimpang dari jalur jalanan serta membantu menstabilkan posisi mobil kembali ke jalurnya.

35
1. The Lane Departure WarningMemperingatkan pengemudi ketika mobil
bergerak keluar jalur dengan alarm audio (buzzer), maupun alarm lampu .2. Lane Keeping Assist
Ketika sistem telah mendeteksi mobil keluar jalur, sistem juga membantu mobil agar tetap berada di jalur semula dengan menggerakkan kemudi secara otomatis sampai sistem merasa jalurnya tepat.
Lane departure warning
Lane keeping assist

36
Pre-Collision / Pre-Crash

37
PRE-COLLISION(Mengingatkan pengemudi tentang potensi terjadinya tabrakan)
Berdasarkan posisi dan kecepatan mobil, sistem akan memperkirakan kondisi jalan beserta objek didepannya. Bahkan akan menggunakan alarm untuk mengingatkan pengemudi bila diperlukan.
Pre-Collision System

38
COLLISION WARNING
• Front Collision WarningMemiliki prinsip sama seperti Radar Cruise Control.• Cut-in Collision Warning / Side Impact Detection
Radar terletak di bagian sisi samping mobil.• Rear-End Collision Warning
Terletak di bagian belakang mobil untuk mengingatkan pengemudi bila terjadi resiko kecelakaan di belakang.
Rear-End Collision Avoidance System

39
Notify Pedestrian

40
Mengingatkan Pejalan kaki di sekitar Mobil
Sistem ini berlangsung sangat cepat. Di Japan, saat mobil melaju di kecepatan 25km/h atau saat mundur, sistem dapat memberitahu pejalan kaki di sekitar mobil dengan alarm suara otomatis. Alarm ini bisa didaktifkan atau dimatikan.
Pedestian Detection System

41
Parking Assist

42
Untuk mengukur posisi objek yang sangat berdekatan, seperti jalur trotoar dan kendaraan lain yang sedang parkir. Sistem pendeteksian obyek menggunakan gelombang ultrasonik. Dibagi menjadi 3 klasifikasi, diantaranya:
Park Assist Intelligent Parking Assist (IPA) Backing Assist Rear View Monitor System
Parking Assist

Park Assist
Sensor ultrasonik dirancang di bagian sudut-sudut mobil untuk mendeteksi objek dan mengingatkan pengemudi dengan alarm suara dan display, Selain itu, juga ada sensor penggerak (steering sensor) untuk melakukan manuver.
43
Park Assist System

44
Back Guide Monitor
Ketika mobil berjalan mundur, sistem akan memeriksa lingkungan sekitar untuk memastikan keamanan pengemudi. Dengan adanya kamera di sisi belakang akan memungkinkan untuk bisa melihat tampilan di belakang mobil (khususnya ketika parkir di garasi).
Back Guide System

45
Intelligent Park Assist
Sistem akan membantu mobil parkir saat parkir secara paralel maupun parkir di garasi. Ketika melakukan parkir, sistem akan membantu kemudi (bisa dengan mengambil alih kemudi) agar posisi mobil tepat dan akurat. Bahkan jika pengemudi belum lihai melakukan parkir, proses ini akan terasa singkat.

46
Intelligent Park Assist System

47
Autopilot Fiture

48
Autopilot pada Mobil
Sebuah mobil kendali otomatis (driverless car, self-driving car, robotic car) adalah sebuah kendaraan yang memiliki kapabilitas (keterampilan dan kemampuan mengatasi masalah) untuk mendeteksi lingkungan tanpa bantuan manusia.
Dapat mendeteksi dengan menggunakan RADAR, LIDAR, GPS, odometri (pengukur jarak untuk mengetahui waktu mengganti oli) and tampilan komputer. Dengan menggunakan informasi sensorik untuk mengidentifikasi sesuai navigasi jalan, serta membedakan letak mobil di jalan.
Autopilot 1 Autopilot 2

49

50
PENGGUNAAN RADAR DALAM MOTOR

Motorcycle Radar DetectorSebuah detektor radar adalah perangkat elektronik digunakan
oleh pengendara untuk mengenali jika kecepatan mereka sedang diawasi oleh polisi atau penegakan hukum. Kebanyakan radar ini digunakan pengemudi untuk menurunkan kecepatan agar tidak terkena sanksi dari polisi terkait mengebut.
51

Kesimpulan
52

Perbedaan radar 24 GHz dan 77 GHz terletak pada jangkauan areanya. Jika radar 24 GHz () beroperasi pada SRR, maka radar 77 GHz dapat beroperasi hingga LRR ().
53

Freescale 77 GHz Technology Advantages• Multi-mode, multi-application capability (long- and mid-range)
1.Allows one radar to be used for multiple safety systems:-Adaptive cruise control -Headway alert-Collision warning -Mitigation and brake support
• Solid-state technology1.Highest level integrationMost advanced SiGe technology with multi-channel transmitter and receiver chips2.No moving parts.
The main advantages of the 77 GHz to 81 GHz frequency range (79 GHz band) are that radar devices can be much smaller, a single technology can be used for all applications, and the risk of mutual interference is low because of the smaller emission power required.
3.Higher frequency radar systems tend to perform better because they are more reliable and more accurate
• Class-leading performance and durability1.Resistant to vibration and extremely robust2.Innovative design provides excellent multi-target discriminationIncluding precise range, approach speed and angle data3.High speed FMCW waveform combined with 2D-FFT algorithmProvides independent measurements of range and range rateProvides superior detection of clustered stationary objects
54

Dengan adanya radar, maka kita bisa memperkirakan jarak dari kendaraan lain, dapat menghindari terjadinya tabrakan dengan objek tertentu. Sistem yang memiliki spesifikasi rendah (a low-resolution system) akan menyebabkan tingkat kesalahan alarm yang tinggi dan bahkan tidak bisa mendeteksi objek kecil saat ada objek besar di depannya.
55

Automotive Radar ApplicationsApplication Detection Range Safety Aspect Technology
Adaptive Cruise Control 200 meters Normal driving;
accident avoidance 77 GHz Radar
Pre-Crash 30 meters Accident; mitigation of impact
77 GHz Radar / 24 GHz Radar 76 / 81
GHz RadarBlind Spot Detection 20 meters Normal driving;
accident avoidance24 GHz Radar/ Vision sensor
Lane Departure Warning 60 meters Normal driving;
accident avoidance Vision sensor
Stop and Go 30 meters Normal driving; accident avoidance
77 GHz + 24 GHz Radar 76/81 GHz
Radar
56

57
Terima kasih