Alat Musik
56
6 BAB 2 LANDASAN TEORI 2.1. Inteligensia Semu Teori mengenai inteligensia semu akan dibagi menjadi sejarah inteligensia semu, definisi inteligensia semu, inteligensia semu dan kecerdasan alami dan komputasi inteligensia semu dan komputasi konvensional dan akan dijabarkan dalam sub-bab di bawah ini. 2.1.1. Sejarah Inteligensia Semu Inteligensia semu termasuk bidang ilmu yang relatif muda. Pada tahun 1950-an para ilmuwan dan peneliti mulai memikirkan bagaimana cara suatu mesin dapat melakukan pekerjaan seperti yang dikerjakan oleh manusia. Tes untuk mengetahui dapat tidaknya suatu mesin dikatakan cerdas pertama kali diusulkan oleh Alan Turing, seorang matematikawan dari Inggris. Hasil tes tersebut kemudian dikenal dengan nama Turing Test, dimana mesin tersebut menyamar sebagai manusia di dalam suatu permainan yang mampu memberikan respon terhadap serangkaian pertanyaan yang diberikan kepadanya. Turing beranggapan bahwa apabila suatu mesin dapat meyakinkan manusia, bahwa dirinya berkomunikasi dengan manusia lain maka dapat dikatakan bahwa mesin tersebut cerdas (http://en.wikipedia.org/wiki/Alan_Turing.htm ). Inteligensia semu itu sendiri dimunculkan pada tahun 1956 oleh seorang profesor dari Massachusetts Institute of Technology bernama John McCarthy di hadapan para peneliti AI yang menghadiri Dartmouth Conference. Pada konferensi tersebut juga didefinisikan tujuan utama dari inteligensia semu, yaitu mengetahui dan memodelkan
-
Upload
ariel-sayudi -
Category
Documents
-
view
14 -
download
4
description
yayayaya
Transcript of Alat Musik

6
BAB 2
LANDASAN TEORI
2.1. Inteligensia Semu
Teori mengenai inteligensia semu akan dibagi menjadi sejarah inteligensia semu,
definisi inteligensia semu, inteligensia semu dan kecerdasan alami dan komputasi
inteligensia semu dan komputasi konvensional dan akan dijabarkan dalam sub-bab di
bawah ini.
2.1.1. Sejarah Inteligensia Semu
Inteligensia semu termasuk bidang ilmu yang relatif muda. Pada tahun 1950-an
para ilmuwan dan peneliti mulai memikirkan bagaimana cara suatu mesin dapat
melakukan pekerjaan seperti yang dikerjakan oleh manusia. Tes untuk mengetahui dapat
tidaknya suatu mesin dikatakan cerdas pertama kali diusulkan oleh Alan Turing, seorang
matematikawan dari Inggris. Hasil tes tersebut kemudian dikenal dengan nama Turing
Test, dimana mesin tersebut menyamar sebagai manusia di dalam suatu permainan yang
mampu memberikan respon terhadap serangkaian pertanyaan yang diberikan kepadanya.
Turing beranggapan bahwa apabila suatu mesin dapat meyakinkan manusia, bahwa
dirinya berkomunikasi dengan manusia lain maka dapat dikatakan bahwa mesin tersebut
cerdas (http://en.wikipedia.org/wiki/Alan_Turing.htm).
Inteligensia semu itu sendiri dimunculkan pada tahun 1956 oleh seorang profesor
dari Massachusetts Institute of Technology bernama John McCarthy di hadapan para
peneliti AI yang menghadiri Dartmouth Conference. Pada konferensi tersebut juga
didefinisikan tujuan utama dari inteligensia semu, yaitu mengetahui dan memodelkan

7
proses – proses berfikir manusia dan mendesain mesin agar dapat menirukan kelakuan
manusia tersebut.
Beberapa program inteligensia semu mulai dibuat pada tahun 1956, antara lain
Logic Theorist yang diperkenalkan pada Dartmouth Conference. Program ini dapat
membuktikan teorema–teorema matematika. Kemudian ada Sad Sam, yang dibuat oleh
Robert K. Lindsay pada tahun 1960. Program ini dapat mengetahui kalimat–kalimat
sederhana yang ditulis dalam bahasa Inggris dan mampu memberikan jawaban dari
fakta–fakta yang didengar dalam sebuah percakapan. Program ELIZA yang dibuat oleh
Joseph Weizenbaum pada tahun 1967 mampu memberikan terapi teradap pasien dengan
cara mengajukan beberapa pertanyaan.
2.1.2. Definisi Inteligensia Semu
Terdapat beberapa definisi yaang berbeda dari para ahli mengenai inteligensia
semu, di antaranya adalah sebagai berikut :
Menurut Rich dan Knight (1991, p3), inteligensia semu adalah salah satu bagian
dari ilmu komputer yang membuat komputer dapat melakukan pekerjaan seperti
manusia dan sebaik manusia.
Menurut Turban dan Frenzel (1992, p3), inteligensia semu adalah cabang dari
ilmu komputer yang mengarah pada pembuatan piranti lunak dan piranti keras dengan
tujuan menghasilkan sesuatu seperti yang dihasilkan oleh pola pikir manusia.
Menurut Luger dan Stubblefield (1993, p1), inteligensia semu adalah suatu
cabang dari ilmu komputer yang berusaha memberikan kecerdasan kepada komputer
dengan teori dan prinsip-prinsip terapan termasuk penggunaan data terstruktur dalam

8
mempresentasikan suatu informasi, algoritma untuk memanipulasi informasi dan bahasa
serta teknik pemrograman yang selanjutnya untuk pengimplementasian.
Menurut Jackson (1999, p15), inteligensia semu adalah bagian dari ilmu
komputer yang berhubungan dengan pertancangan sistem komputer inteligensi.
Menurut Winston (1992, p1), inteligensia semu adalah suatu ilmu komputasi
yang memungkinkan komputer untuk menanggapi, menalar, dan bertindak seperti
manusia.
Pada awal diciptakan, komputer hanya digunakan sebagai alat berhitung saja.
Namun, seiring dengan perkembangan zaman, peran komputer semakin mendominasi
kehidupan manusia. Komputer tidak lagi digunakan hanya sebagai alat berhitung, tetapi
juga diberdayakan untuk mengerjakan segala sesuatu yang dapat dilakukan oleh manusia.
Manusia mampu menyelesaikan segala permasalahan yang ada di dunia ini
karena manusia memiliki pengetahuan dan pengalaman. Pengetahuan dan pengalaman
tersebut diperoleh melalui suatu proses pembelajaran. Semakin banyak pengetahuan
yang dimiliki manusia, maka diharapkan akan lebih mampu menyelesaikan
permasalahan yang dihadapi. Namun ternyata pengetahuan dan pengalaman saja tidak
cukup. Manusia juga memerlukan suatu penalaran untuk mengambil keputusan dalam
menyelesaikan permasalahan berdasarkan pengetahuan dan pengalaman yang manusia
miliki. Manusia yang memiliki banyak pengetahuan dan pengalaman, apabila tidak
memiliki daya penalaran yang baik akan sulit menyelesaikan permasalahannya. Agar
komputer dapat bertindak seperti dan sebaik manusia, maka komputer juga harus diberi
bekal pengetahuan dan kemampuan untuk menalar.
Pengertian inteligensia semu dapat dipandang dari berbagai sudut pandang,
antara lain sudut pandang inteligensia itu sendiri, sudut pandang penelitian, sudut

9
pandang bisnis, dan sudut pandang pemrograman. Dari sudut pandang inteligensia,
inteligensia semu diharapkan dapat membuat komputer menjadi lebih ‘cerdas’, mampu
melakukan seperti apa yang dilakukan oleh manusia. Dari sudut pandang penelitian,
inteligensia semu adalah suatu ilmu bagaimana membuat komputer dapat melakukan
sesuatu sebaik yang dilakukan oleh manusia. Dari sudut pandang bisnis inteligensia
semu adalah suatu kumpulan peralatan yang sangat bermanfaat dan metodologis dalam
menyelesaikan masalah–masalah yang berhubungan dengan bisinis. Dan dari sudut
pandang pemrograman inteligensia semu merupakan suatu ilmu tentang pemrograman
simbolik, penyelesaian masalah (problem solving) dan pencarian (searching).
Untuk melakukan aplikasi kecerdasan buatan ada dua bagian utama yang sangat
dibutuhkan seperti yang terlihat pada Gambar 2.1, yaitu :
a. Basis Pengetahuan (Knowledge Base), berisi fakta–fakta, teori, pemikiran, dan
hubngan antara satu dengan lainnya.
b. Motor Inferensi (Ineference Engine), yaitu kemampuan menarik kesimpulan
berdasarkan pengalaman.
Gambar 2.1 Penerapan Konsep Kecerdasan Buatan di Komputer
Basis Pengetahuan
Motor Inferensi
Komputer
Input: masalah,
pertanyaan, dll
output: jawaban,
solusi

10
Beberapa task domain dari inteligensia semu yaitu (Rich dan Knight, 1991, p3) :
a. Mundane Task
- Persepsi (vision dan speech).
- Bahasa alami (understanding, generation, dan translation).
- Pemikiran yang bersifat commonsense.
- Robot control.
b. Formal Task
- Permainan / games.
- Matematika (geometri, logika, kalkulus, integral, pembuktian).
c. Expert Task
- Analisis finansial.
- Analisis medikal.
- Analisis ilmu pengetahuan.
- Rekayasa (desain, pencarian kegagalan, perencanaan manufaktur).
2.1.3. Inteligensia Semu dan Kecerdasan Alami
Menurut Turban dan Frenzel (1992, p9), jika dibandingkan dengan kecerdasan
alami, inteligensia semu memiliki beberapa keuntungan secara komersial antara lain :
a. Inteligensia semu lebih bersifat permanen dan konsisten sedangkan kecerdasan alami
bersifat sementara dan berubah–ubah. Hal ini dimungkinkan karena daya pikir dan
daya ingat manusia yang sering pula berubah–ubah, sedangkan pada program
komputer selama program tersebut tidak dirubah maka akan tetap seperti itu.
b. Inteligensia semu lebih mudah dipublikasikan dan disebarkan. Pengetahuan yang
terletak di suatu sistem komputer dapat dengan mudah disalin ke sistem komputer

11
yang lain, sedangkan menyampaikan pikiran dan pengetahuan manusia ke manusia
lain lebih membutuhkan waktu dan proses yang lama dan lebih sulit dikarenakan
daya pikir manusia yang berbeda–beda.
c. Inteligensia semu lebih murah dibandingkan kecerdasan alami. Menggunakan suatu
program komputer dalam menyelesaikan suatu pekerjaan tertentu akan lebih murah,
lebih cepat dan lebih mudah dibandingkan bila menggunakan tenaga kerja manusia.
d. Inteligensia semu dapat didokumentasikan sedangkan kecerdasan alami sulit untuk
direproduksi.
2.1.4. Komputasi Inteligensia Semu dan Komputasi Konvensional
Terdapat beberapa perbedaan antara komputasi yang dilakukan pada kecerdasan
buatan dan komputasi konvensional. Perbedaan tersebut dapat dilihat pada Tabel 2.1 .
Tabel 2.1 Kecerdasan Buatan Vs. Pemrograman Konvensional
Dimensi Kecerdasan Buatan Pemrograman
Konvensional
Pemrosesan Mengandung konsep-
konsep simbolik
Algoritmik
Sifat Input Bisa tidak lengkap Harus lengkap
Pencarian Kebanyakan bersifat
heuristik
Biasanya didasarkan pada
algoritma
Keterangan Disediakan Biasanya tidak disediakan
Fokus Pengetahuan Data dan informasi

12
Struktur Kontrol dipisahkan dari
pengetahuan
Kontrol terintegrasi dengan
data
Sifat Output Kuantitatif Kualitatif
Pemeliharaan dan Update Relatif murah Sulit
Kemampuan menalar Ya Tidak
(Sumber tabel : Kusumadewi, 2003, p5.)
2.2. Neural Network
Menurut Russel dan Norvig (1995, p737), neural network adalah susunan dari
beberapa node atau unit, yang saling beruhubungan, di mana pada tiap-tiap hubungan ini
terdapat nilai bobot (weight) tertentu.
Neural network sering dikenal dengan berbagai istilah, antara lain, yaitu Parallel
Distributed Processing (pertama kalinya Neural Network dikembangkan dengan nama
ini), Connectionist Models, Human-like Brain Processing, Neuro Computing, Neural
Networks, Artificial Neural Systems.
Kata neuron sendiri berarti node. Otak manusia memiliki 1011 neuron di mana
masing-masing neuronnya berhubungan dengan 104 neuron lainnya melalui synapsis.
Sehingga jumlah sambungan/synapsis yang terdapat dalam jaringan otak manusia adalah
1015.
Neural Network Back Propagation dikembangkan oleh ilmuwan komputer
Amerika bernama Paul Werbos (1974), David Parker (1984/1985), Rumelhart, Hinton,
& Williams (1986), serta McClelland & Rumelhart (1988).

13
2.2.1. Konsep Dasar Neural Network
Menurut Fausett(1994, p3), pemrosesan informasi pada Neural Network
mengambil analogi seperti halnya pada neuron biologis. Setiap neuron menerima sinyal-
sinyal dari neuron lain melalui sambungan yang disebut synapsis. Sebagian sinyal input
cendrung menyebabkan neuron terhambat atau terlemahkan (inhibited).
Ketika efek kumulatif dari sinyal tersebut melebihi suatu batas threshold, neuron
yang bersangkutan akan menembakkan sinyal ke neuron lainnya. Sebuah neuron tunggal
atau konsep Neural Network, digambarkan dalam bentuk node yang menerima sinyal-
sinyal input dan menghasilkan output dengan proses tersebut di atas, dan karenanya
sering pula disebut sebagai summing device.
Sinyal neuron yang dimaksud digambarkan pada Gambar 2.2 berikut:
(Sumber: Fausett, 1994 p.4)
Gambar 2.2 Sinyal pada Neuron
Model komputasinya dapat dituliskan sebagai berikut:
W3
W2
W1
Input
Net Output
X2
X1
X3
Y f
summing device threshold
Y = X1W1 + X2W2 + X3W3 + … + XnWn
n Y = Σ XiWi i = 1
Net Ouput = f(Y)

14
f disebut sebagai fungsi aktivasi, sedangkan Net Output merupakan level aktivasi dan
Wi adalah weight/bobot yang menunjukkan kekuatan synapsis.
Neural Network merupakan sebuah sistem pemrosesan informasi yang memiliki
karakteristik serupa dengan jaringan neural biologis. Karakteristik yang diadopsi antara
lain:
• Jumlah yang besar dari processing element atau neuron.
• Neuron-neuron bekerja secara paralel.
• Memiliki sifat fault tolerance.
Fungsi dan kinerja Neural Network sebagai sebuah sistem sangat tergantung tiga
hal:
• Karakteristik neuron: Terkait dengan fungsi aktivasi yang digunakan.
• Topologi network: Bagaimana sejumlah neuron dalam sistem atau model NN
dihubungkan.
• Learning rules: Aturan-aturan pembelajaran yang digunakan.
Beberapa model atau arsitektur atau struktur Neural Network :
• Multilayer networks (Back Propagation).
• Bidirectional Associative Memory (BAM).
• Self-Organizing Map (SOM).
Beberapa learning rules yang terkait dengan ketiga model diatas :
• Error Correction Learning Rules.
• Hebbian Learning Rules.
• Kohonen Map.

15
2.2.2. Arsitektur Neural Network
Menurut Haykin (1999, p21), neuron-neuron seringkali diatur atau ditata
sedemikian rupa dalam bentuk layer atau lapisan. Pada umumnya neuron-neuron yang
berada pada satu layer berperilaku sama. Faktor-faktor penting yang menentukan
perilaku sebuah neuron adalah fungsi aktivasi dan pola-pola koneksi bobot baik itu
sinyal input maupun sinyal output. Dalam satu layer, umumnya setiap neuron memiliki
fungsi aktivasi dan juga pola koneksi bobot tersebut.
Pengaturan neuron-neuron ke dalam layer-layer dan pola-pola koneksinya
disebut Arsitektur Neural Network. Neural Network sering diklasifikasikan sebagai
single layer atau multi layer. Dalam penentuan jumlah layer, input unit tidak dihitung
sebagai layer, karena tidak melakukan komputasi. Dengan demikian, jumlah layer pada
Neural Network dapat didefinisikan sebagai “Jumlah layer-layer koneksi bobot antara
dua unit lapisan”.
Ilustrasi dari single layer network adalah seperti pada Gambar 2.3 berikut:
(Sumber: Fausett, 1994 p.13)
Gambar 2.3. Single layer Network
Wnm
Wnj Wn2
Wn1
Wim
WijWi2 Wi1
W2m W2j
W11
W22W21
W1m W1j
W12
One layer of Weight -> akan disimpan dalam bentuk MATRIKS BOBOT
Ym
Yj
Y2
Y1
Xn
Xi
X2
X1

16
Suatu single layer networks memiliki satu layer koneksi bobot seperti terlihat
pada gambar/ilustrasi tersebut.
Ilustrasi dari multi layer network adalah seperti pada gambar 2.4 sebagai berikut:
(Sumber: Fausett, 1994 p.13)
Gambar 2.4. Multi Layer Network
Multi layer network merupakan network dengan arsitektur yang terdiri dari dua
atau lebih layer-layer dari koneksi bobot. Dengan kata lain, multi layer network
memiliki satu atau lebih hidden unit. Dengan demikian, multi layer networks memiliki
satu output unit. Multi layer networks dapat memecahkan masalah-masalah yang lebih
kompleks dibanding single layer networks. Namun training pada multilayer networks
lebih sulit dilakukan, walau lebih besar peluang keberhasilannya.
Ym Dimensi p
Z=(Z1,Z2,…,Zp) Dimensi n X=(X1,X2,…,Xn)
Xn Vnp
Vnj
Vn2 Vn1
Xi Vip
Vij Vi2 Vi1
X2 V2p
V2j
V22
X1
V21
V1p V1j
V12
V11
Zp
Zj
Z2
Z1
Wpm
Wpk
Wp2 Wp1
Wjm Wjk
Wj2 Wj1
W2m W2k
W11
W22 W21
W1m W1k
W12
Yk
Y2
Y1
One layer of weight One layer of weight hidden unit
Dimensi m Y=(Y1,Y2,…,Ym)
V = [n x p] W = [p x m]

17
2.2.2.1. Inisialisasi Bobot Secara Umum
Menurut Fausett(1994, p.15), metode untuk memberi nilai-nilai bobot koneksi
disebut juga “training”. Training merupakan hal yang sangat penting yang membedakan
karakter Neural Network yang berbeda.
Inisialisasi bobot, yaitu masukan ke unit tersembunyi, dirancang agar dapat
meningkatkan kemampuan dari unit tersembunyi pada tahap pembelajaran. Inisialisasi
dilakukan dengan mendistribusikan bobot awal untuk tiap pola masukan, sehingga
jaringan akan memasukkan bobot awal ke dalam salah satu unit tersembunyi yang
nilainya akan berada dalam rentang dimana unit tersembunyi akan melakukan
pembelajaran secara cepat.
Inisialisasi bobot yang terlalu besar mengakibatkan sinyal masukan yang telah
diinisialisasikan akan jatuh pada daerah dimana turunan dari fungsi sigmoid mempunyai
nilai yang sangat kecil (daerah saturasi). Sedangkan jika inisialisasi awal bobot terlalu
kecil, masukan yang menuju unit tersembunyi atau unit keluaran akan mendekati nol,
dan akam menyebabkan proses pembelajaran menjadi sangat lambat.
2.2.2.2. Fungsi Aktivasi
Fungsi aktivasi adalah suatu fungsi yang memproses nilai input untuk
menghasilkan suatu nilai output (http://www.heatonresearch.com/lexicon/activation-
function.html).
Operasi dasar pada sebuah neuron mencakup penjumlahan bobot (weight) dari
sinyal input dan menghasilkan output serta mengaplikasikan fungsi aktivasi untuk input
unit, digunakan semua neuron, khususnya pada input unit. Pada berbagai kasus,

18
umumnya digunakan fungsi aktivasi non-linear. Fungsi-fungsi aktivasi yang sering
digunakan dalam Neural Network adalah:
a. Fungsi identitas:
f(x) = x (2.1)
Digunakan pada neuron-neuron input unit.
b. Fungsi tangga biner (biner step function):
f(x) = 1, jika x > = θ (2.2)
f(x) = 0, jika x < θ (2.3)
di mana θ adalah suatu nilai threshold.
Fungsi ini digunakan untuk mengubah input bersih (net input) yang
merupakan bariabel kontinu, menjadi output bernilai biner (0 dan 1). Nilai
threshold θ menjadi garis pemisah antara daerah dengan respons aktivasi
positif dan negatif.
c. Fungsi tangga bipolar (bipolar step function):
f(x) = 1, jika x > = θ (2.4)
f(x) = -1, jika x < θ (2.5)
Fungsi tangga bipolar serupa dengan fungsi tangga biner, hanya saja
memiliki daerah hasil {-1,1}.
d. Fungsi sigmoid biner.
Fungsi ini mencakup fungsi-fungsi berbentuk kurva S. Yang sering
digunakan adalah fungsi logistik karena memiliki kelebihan dalam melatih
(training) pada neural network yang menggunakan algoritma Back
Propagation. Fungsi logistik sigmoid yang dimaksud adalah σ = 1.

19
f(x) = 1
1 + e-σx (2.6)
di mana σ merupakan parameter kecuraman yang diberikan, umumnya σ
dipilih sama dengan 1. Turunan pertama fungsi ini:
f’(x) = σ f(x) [1 – f(x)] (2.7)
dengan daerah hasil interval 0 sampai dengan 1.
Implikasi tidak langsung yang bisa disimpulkan bahwa dalam neural
network, nilai-nilai input berupa vektor dan elemen-elemennya, nilai-nilainya
terkait dengan fungsi aktivasi yang digunakan.
e. Fungsi sigmoid bipolar
Fungsi sigmoid biner bisa diskalakan sehingga memiliki daerah hasil
pada sembarang interval sesuai dengan permasalahan yang diberikan. Yang
paling umum adalah daerah hasil dari -1 sampai dengan 1. Fungsi hasil
perkalian ini disebut dengan fungsi sigmoid bipolar.
Jika f(x) adalah fungsi sigmoid biner dan g(x) adalah fungsi sigmoid
bipolar, maka:
f(x) = 1
1 + e-σx (2.8)
g(x) = 2f(x) – 1 (2.9)
g(x) = 2
1 + e-σx (2.10)
g(x) = 1-ex
1+ex (2.11)
g’(x) = (σ/2) [1+g(x)] [1-g(x)] (2.12)
- 1

20
2.2.3. Neural Network Back Propagation
Menurut Fausett(1994, p.15), pattern association adalah bentuk spesial lain dari
sebuah pemetaan masalah, di mana hasil yang diinginkan bukanlah berupa ya atau tidak,
melainkan merupakan sebuah pola. Neural Network Back Propagation merupakan
bagian dari Supervised training, di mana pada training jenis ini, hasil training didapatkan
dari sebuah urutan dari beberapa vektor-vektor training atau pola, masing-masing
dengan target output vektor yang juga berhubungan.
Neural Network Back Propagation membandingkan perhitungan keluaran
jaringan saraf tiruan dengan target keluaran dan menghitung nilai error untuk setiap unit
pada jaringan. Jaringan saraf tiruan menyesuaikan bobot pada link dengan nilai error
setiap unit, dimulai dari hubungan antara lapisan tersembunyi dan lapisan keluaran
terakhir. Setelah jaringan melakukan pembaruan bobot pada sejumlah hubungan,
jaringan menghitung nilai error untuk lapisan sebelumnya dan melakukan penyesuaian.
Algoritma Neural Network Back Propagation diteruskan dengan menyesuaikan seluruh
bobot antara lapisan tersembunyi dan lapisan masukan
Proses pelatihan menggunakan Neural Network Back Propagation terdiri dari
proses feedforward, backpropagation-error (perhitungan error propagasi balik), dan
update weight (pembaruan nilai bobot). Satu siklus pembelajaran melewati tiga tahap
tersebut, disebut dengan 1(satu) epoch. Semakin banyak pembelajaran yang dilakukan
maka akan semakin kecil pula tingkat error yang dihasilkan di lapisan keluaran, dan
dengan demikian semakin kecil juga error suatu sistem.
Algoritma pelatihan Neural Network Back Propagation adalah sebagai berikut :
Langkah 0 : Inisialisasi bobot
Langkah 1 : Selama kondisi berhenti false, lakukan langkah 2-9

21
Langkah 2 : Untuk setiap pasangan data pelatihan, lakukan langkah 3-9
Feedforward (langkah maju) :
Langkah 3 : Setiap unit input (Xi , i = 1, ..., n) menerima sinyal input xi dan
meneruskan sinyal tersebut ke semua unit pada lapisan di atasnya
(hidden layer).
Langkah 4 : Setiap unit tersembunyi (Zj , j = 1, ..., p) menjumlahkan sinyal –
sinyal input berbobot,
n
z _inj = v0j + ∑ xi vij (2.13)
i=1
gunakan fungsi aktivasi untuk menghitung sinyal outputnya.
zj = f (z _inj ) (2.14)
dan kirikan sinyal tersebut ke semua unit di lapisan atasnya (unit –
unit output).
Langkah 5 : Setiap unit output (Yk , k = 1, ..., m) menjumlahkan sinyal – sinyal
input terbobot,
p
y _ink = w0k + ∑ zj wjk (2.15)
j=1
Gunakan fungsi aktivasi untuk menghitung sinyal outputnya,
yk = f (y _ink ) (2.16)

22
Backward (langkah mundur) :
Langkah 6 : Tiap – tiap unit output (Yk , k = 1, ..., m) menerima pola target
yang berhubungan dengan pola input pembelajaran, hitung
informasi errornya,
δk = (tk – yk ) f’ (y _ink ) (2.17)
hitung koreksi bobot (yang nantinya akan digunakan untuk
memperbaiki nilai wjk),
∆ wjk = α δk zj (2.18)
Hitung juga koreksi bias (yang nantinya akan digunakan untuk
memperbaiki nilai w0k),
∆ w0k = α δk (2.19)
Dan kirimkan nilai δk ke unit – unit yang ada di lapisan bawahnya.
Langkah 7 : Setiap unit tersembunyi (Zj , j = 1, ..., p) menjumlahkan delta
inputnya (dari unit yang berada pada lapisan atasnya).
m
δ _inj = ∑ δk wjk (2.20)
k=1
kalikan nilai ini dengan turunan dari fungsi aktivasinya untuk
menghitung informasi errornya,
δj = δ _inj f’ (z _inj ) (2.21)

23
kemudian hitung koreksi bobot (yang nantinya digunakan untuk
memperbaiki nilai vij),
∆ vij = α δj xi (2.22)
Hitung juga koreksi bias (yang nantinya digunakan untuk
memperbaiki nilai v0j),
∆ v0j = α δj (2.23)
Perbaikan bobot dan bias :
Langkah 8 : Setiap unit output (Yk , k = 1, ..., m) memperbaiki bobot dan
biasnya
( j = 0, ..., p),
wjk (baru) = wjk (lama) + ∆ wjk (2.24)
Setiap unit tersembunyi (Zj , j = 1, ..., p) memperbaiki bobot dan
biasnya (i = 0, ..., n),
vij (baru) = vij (lama) + ∆ vij (2.25)
Langkah 9 : Tes kondisi berhenti
Sebuah Neural Network Back Propagation yang baik membutuhkan lebih dari
sekedar sebuah algoritma pembelajaran (Yun, 2001). Maka, untuk mendapatkan
performa Neural Network Back Propagation yang baik, ada beberapa parameter seperti
epoch, kecepatan pembelajaran, lapisan tersembunyi dan jumlah unit tersembunyi yang
harus dipilih secara selektif untuk memperbaiki kelemahan-kelemahan pada Neural
Network Back Propagation, antara lain :

24
1. Epochs
Satu epoch berarti satu kali siklus pembelajaran (Yun, 2001, p17). Jumlah
epoch menunjukkan kecepatan sistem. Semakin banyak epoch yang dibutuhkan
dalam mencapai target error, berarti kerja sistem akan semakin lama, begitu pula
sebaliknya. Pemberian batas epoch yang besar berarti meningkatkan akurasi
arsitektur, namun membutuhkan waktu pembelajaran yang lebih lama. Begitu pula
sebaliknya.
2. Kecepatan Pembelajaran
Kecepatan pembelajaran (learning rate) digunakan untuk mengontrol
perubahan nilai bobot, dengan nilai koefisien berkisar antara 0 dan 1. Semakin tinggi
nilai kecepatan pembelajaran yang digunakan akan menyebabkan perubahan yang
semakin besar pada bobot, sehingga pembelajaran menjadi kurang baik. Sedangkan,
dengan tingkat kecepatan pembelajaran yang rendah akan menghasilkan
pembelajaran yang akurat namun prosesnya menjadi sangat lambat (Sarle, 2004).
Kecepatan pembelajaran yang baik akan memberikan hasil yang efektif, namun
bersifat relatif untuk suatu sistem. Jadi kecepatan pembelajaran yang baik untuk
sebuah sestem belum tentu baik untuk sistem yang lain.
3. Inisialisasi Bobot dalam Neural Network Back Propagation
Prosedur umum dalam inisialisasi nilai awal bobot (dan bias) adalah dengan
nilai acak antara -0.5 dan 0.5 (atau antara -1 dan 1). Inisialisasi nilai awal bobot
Nguyen-Widrow merupakan suatu modifikasi dalam memberikan nilai awal bobot
yang akan membantu Neural Network Back Propagation melakukan proses
pembelajaran lebih cepat. Percobaan yang dilakukan oleh Laurene Fausett (Fausett,
1994, p302) mengenai permasalahan XOR membuktikan hal ini. Dari Tabel 2.2

25
terlihat bahwa percobaan dengan algoritma Nguyen-Widrow memiliki banyak epoch
yang jauh lebih sedikit daripada percobaan tanpa algoritma Nguyen-Widrow.
Tabel 2.2 : hasil percobaan XOR oleh Laurene Fausett
Origin (epochs) After Modification with
Nguyen–Widrow (epochs)
Biner XOR 2,891 1,935
Bipolar XOR 387 224
Inisialisasi bobot awal Nguyen-Widrow dapat dihitung dengan menggunakan
algoritma sebagai berikut : untuk setiap unit tersembunyi ( )pj ,...,1= , inisialisasikan
niali vektor bobot dari unit tersembunyi ijv (lama) dengan nilai acak antara -0.5
sampai 0.5 atau y− sampai dengan y , dimana y adalah rentang yang telah
ditentukan oleh perancang sistem. Setelah itu, hitung nilai )(oldvj (normalisasi),
menggunakan rumus normalisasi :
nn
i
pi
ap XX
1
1⎥⎦⎤
⎢⎣⎡∑==
dan hitung nilai β menggunakan rumus:
( ) nn pp 7.07.0 1 ==β
baru kemudian nilai bobot baru antara lapisan masukan dan lapisan tersembunyi
dapat diinisialisasikan dengan persamaan :
)()(
oldVoldV
i
vyij
β=
(2.26)
(2.27)
(2.28)

26
dengan nilai bias dan bobot antara lapisan tersembunyi dengan lapisan keluaran
merupakan nilai acak antara -0.5 dan 0.5 atau antara - y dan y . Variabel n adalah
banyak unit masukan, variabel p adalah banyak unit tersembunyi, dan variabel β
adalah faktor skala.
4. Fungsi Aktivasi dalam Neural Network Back Propagation
Jangkauan fungsi aktivasi harus sesuai dengan jangkauan nilai target dari
permasalahan tertentu (Fausett, 1994, p309). Fungsi sigmoid bipolar berhubungan
dekat dengan fungsi tangen hiperbolik. Oleh karena itulah fungsi ini sering
digunakan sebagai fungsi aktivasi ketika output yang diperlukan memiliki rentang
antara -1 sampai dengan 1 (Fausett, 1994, p19).
Fungsi sigmoid bipolar mempunyai rentang (-1,1) dan dirumuskan dengan :
( ) ( ) 1exp12 −−+
= xxf σ
dengan fungsi turunannya sebagai berikut :
( ) ( )[ ] ( )[ ]xfxfxf −+= 112' σ
dimana σ merupakan parameter kecuraman yang diketahui nilainya. Umumnya
nilai σ dipilih sama dengan 1.
Proses pelatihan menggunakan fugnsi sigmoid biner membutuhkan waktu
pembelajaran lebih lama karena fungsi sigmoid biner tidak dapat memetakan sinyal
masukan negatif dengan tepat, padahal sinyal bobot pada jaringan bisa bernilai
negatif. Oleh sebab itu, bila fungsi sigmoid biner menerima sinyal masukan yang
bernilai negatif maka pola yang diterimanya tidak akan bisa dipelajari sehingga
sinyal yang diterima selalu bernilai positif (hanya mendekati nilai yang dekat dengan
(2.29)
(2.48)

27
angka nol). Pada beberapa kasus, terdapat beberapa unit yang tidak dapat
mempelajari pola masukan yang bernilai nol (Fausett, 1994, p300). Hal ini telah
dibuktikan oleh Laurene Fausett dalam percobaannya mengenai permasalahan XOR
pada Tabel 2.2. Dengan fungsi sigmoid biner, epoch yang dibutuhkan dalam jaringan
untuk konvergensi sebanyak 3000, sedangkan dengan fungsi sigmoid bipolar proses
pembelajaran menjadi lebih cepat, yaitu hanya membutuhkan epoch sebanyak 387.
5. Lapisan Tersembunyi
Menurut Fausett(1994, p320), Sebuah lapisan tersembunyi sudah cukup
memadai untuk memecahkan permasalahan yang mengandung perkiraan-perkiraan.
Namun, beberapa permasalahan lebih mudah utntuk dipecahkan menggunakan
sebuah jaringan dengan dua atau tiga lapisan tersembunyi, namun hal ini dapat
mempengaruhi kecepatan pembelajaran menjadi lebih lambat.
Tanpa adanya lapisan tersembunyi, hasil dapat diperoleh dengan cepat.
Namun hasilnya tidak optimal karena jangkauan dari error sistem tidak dekat (data
masuk ke Network Back Propagation tanpa melalui “rintangan”, dan langsung
menghasilkan nilai keluaran). Sedangkan penggunaan lapisan tersembunyi yang
terlalu banyak dapat menurunkan performa dari Network Back Propagation itu
sendiri, karena adanya pemetaan rangkaian yang terlalu kompleks serta prosedur
pembelajaran yang terlalu subjektif.
6. Unit Tersembunyi
Jumlah unit tersembunyi yang diperlukan berhubungan dengan kompleksitas
tugas Network Back Propagation yang akan dikerjakan untuk menjalankan tugas
secara maksimal. Sebuah Network Back Propagation dengan unit tersembunyi yang
terlalu sedikit akan memiliki tingkat error pembelajaran dan error klasifikasi yang

28
tinggi karena tidak mampu memetakan masukan yang kompleks menuju keluaran
yang kompleks. Begitu pula sebaliknya, dengan unit tersembunyi yang terlalu
banyak akan dijumpai tingkat error pembelajaran yang rendah namun tingkat error
klasifikasi yang semakin tinggi.
Penentuan banyak unit tersembunyi yang akan digunakan dalam penelitian
dilakukan dengan melakukan percobaan dan membandingkan hasil yang terbaik.
Namun ada beberapa pedoman yang dapat digunakan untuk menentukan banyak unit
tersembunyi yang optimal. Menurut Yun Peng (Yun, 2001, p24), banyak unit
tersembunyi optimal dapat diperkirakan dengan persamaan berikut :
np 2>
dimana p adalah jumlah unit tersembunyi dan n adalah jumlah unit masukan.
Menurut Garson (Garson, 1998, p86), untuk menghitung banyak unit tersembunyi
optimal dapat menggunakan metode yang dirumuskan sebagai berikut :
( )( )[ ]oirnh +=
dimana h adalah jumlah unit tersembunyi, i adalah jumlah unit masukan, o adalah
jumlah unit keluaran, n adalah batas epoch, dan r adalah tingkat noise dari data
yang akan melakukan proses pembelajaran (biasanya antara 5 dan 10).
Pedoman-pedoman yang ada tidak sepenuhnya dapat dipercaya. Oleh karena
itu, percobaan terhadap berbagai macam unit tersembunyi tetap perlu dilakukan.
7. Lama Pembelajaran
Semasa melakukan proses pembelajaran, perlu diperhatikan agar proses yang
berlangsung tidak melebihi tahap kebenaran data yang diinginkan
(2.30)
(2.31)

29
(overfitting/overtrained) sehingga menyebabkan error menjadi lebih besar daripada
yang diharapkan (Cohen dan Jensen, 1996, p1).
Selama error pada tahap pembelajaran, maka proses pembelajaran akan tetap
dilanjutkan. Ketika error mulai meningkat, berarti sistem mulai kehilangan
kemampuannya untuk mengklasifikasi. Maka pada titik ini, pembelajaran harus
dihentikan.
Error yang ditemui pada tahap pembelajaran dikategorikan dalam dua
kondisi yaitu global minima yang merupakan kondisi terendah, dan local minima
adalah kondisi error yang bukan merupakan error terendah.
Proses pembelajaran dengan Network Back Propagation dimulai dan
lilakukan terus menerus dengan tujuan memperoleh error minimum. Hanya ada satu
lembah yang memberikan penyelesaian permasalahan/error terkecil, yaitu global
minima, yang memberikan hasil sempurna. Lembah yang lebih dangkal, yaitu
kondisi local minima. Jika dijumpai local minima dan dianggap telah mencapai
global minima dan pembelajaran tidak diteruskan, maka akan diperoleh suatu hasil
yang kurang baik (Tveter, 2000, p1). Oleh karena itu, proses pembelajaran perlu
dilakukan terus menerus sampai diperoleh global minima.
2.3. Pengembangan Perangkat Lunak
Pada penulisan skripsi ini, penulis akan menggunakan Waterfall Model untuk
pengembangan perangkat lunak. Penggunaan Waterfall Model sangat populer digunakan
sebagai pemodelan suatu proses yang bersifat sekuensial. Waterfall Model sering
digunakan dalam berbagai pendekatan dalam pembuatan software yang dirasakan tidak
fleksibel dan non-iteratif.

30
2.3.1. Penggunaan Waterfall Model
Menurut Pressman (1992, p24-25), Waterfall Model terdiri dari 6 tahap. Gambar
2.5 berikut adalah penjabarannya :
Gambar 2.5 Waterfall Model
Dalam menggunakan model waterfall, proses dari satu fase ke fase selanjutnya
murni bersifat sekuensial. Model waterfall mengindikasikan proses yang awal haruslah
benar-benar telah selesai untuk melanjutkan ke proses selanjutnya. Pengembangan fase
model waterfall bersifat diskrit, model ini tidak dapat melakukan pengembangan yang
bersifat acak, jadi semua tahap harus sesuai dengan urutannya masing-masing.
a. Rekayasa Sistem (System Engineering)
Karena perangkat lunak merupakan bagian dari sebuah sistem yang lebih
besar, maka aktivitas ini dimulai dengan penetapan kebutuhan dari semua elemen
System Engineering
Analysis
Design
Code
Testing
Maintenance

31
sistem. Gambaran sistem ini penting jika perangkat lunak harus berinteraksi dengan
elemen–elemen lain, seperti hardware, manusia dan database.
b. Analisis kebutuhan perangkat lunak (Software Requirement Analysis)
Analisis yang dilakukan pada tahap ini adalah untuk mengetahui kebutuhan
piranti lunak, sumber informasi piranti lunak, fungsi–fungsi yang dibutuhkan,
kemampuan piranti lunak dan antarmuka piranti lunak tersebut.
c. Perancangan (Design)
Perancangan piranti lunak dititikberatkan pada empat atribut program,yaitu
struktur data, arsitektur piranti lunak, rincian prosedur dan karakter antarmuka.
Proses perancangan menerjemahkan kebutuhan ke dalam sebuah representasi
perangkat lunak yang dapat dinilai kualitasnya sebelum dilakukan pengkodean.
d. Pengkodean (Coding)
Aktivitas yang dilakukan adalah memindahkan hasil perancangan menjadi
suatu bentuk yang dapat dimengerti oleh mesin yaitu dengan membuat program.
e. Pengujian (Testing)
Tahap pengujian perlu dilakukan agar output yang dihasilksn oleh program
sesuai dengan yang diharapkan. Pengujian dilakukan secara menyeluruh hingga
semua perintah dan fungsi telah diuji.
f. Pemeliharaan (Maintenance)
Karena kebutuhan pemakai selalu akan meningkat, maka piranti lunak yang
telah selesai dibuat perlu dipelihara agar dapat mengantisipasi kebutuhan pemakai
terhadap fungsi–fungsi baru yang dapat timbul karena munculnya sistem operasi
baru dan perangat keras baru.

32
2.3.2. State Transition Diagram
Menurut Pressman (1997, p301), State Transition Diagram (STD)
mengindikasikan bagaimana suatu sistem berkerja setelah berinteraksi dengan event
eksternal. Untuk memenuhi hal ini, STD merepresentasikan berbagai mode perilaku
(disebut state) dari sistem dan bagaimana setiap transisi terjadi dari state ke state. STD
menyediakan basis permodelan perilaku. Informasi tambahan dari aspek kontrol
software yang terkandung dalam control spesification. STD merepresentasikan perilaku
dari sebuah sistem dengan menggambarkan state-state yang ada dalam sistem dan event-
event yang menyebebkan sistem berganti state. Sebagai tambahan, STD
mengindikasikan tindakan apa yang diambil sebagai konsekuensi dari sebuah event.
Simbol-simbol dari STD yang sering digunakan:
a. State, disimbolkan dengan segiempat.
Simbol state
b. Transition state atau perubahan state disimbolkan dengan panah berarah.
Simbol transition state
c. State adalah kumpulan keadaan atau atribut yang mencirikan seseorang atau suatu
benda pada waktu tertentu atau kondisi tertentu.
d. Condition adalah suatu event pada lingkungan eksternal yang dapat dideteksi oleh
sistem.
e. Action adalah yang dilakukan sistem bila terjadi perubahan state atau merupakan
reaksi terhadap kondisi. Aksi akan menghasilkan keluaran atau tampilan.
f. Display pada screen menghasilkan kalkulasi dan sebagainya.

33
2.4. Pengertian Musik
Musik adalah bunyi yang diterima oleh individu dan berbeda-beda berdasarkan
sejarah, lokasi, budaya dan selera seseorang. Definisi sejati tentang musik juga
bermacam-macam:
− Bunyi yang dianggap enak oleh pendengarnya.
− Segala bunyi yang dihasilkan secara sengaja oleh seseorang atau kumpulan
dan disajikan sebagai musik.
Beberapa orang menganggap musik tidak berwujud sama sekali.
Musik menurut Aristoteles mempunyai kemampuan mendamaikan hati yang
gundah, mempunyai terapi rekreatif dan menumbuhkan jiwa patriotisme (Encyclopedia
Brittanica, 1977, p724).
Seorang ahli estetika, Susanne K. Langer dalam bukunya Feeling and Form
menyebutkan bahwa musik adalah waktu yang dapat didengar (Encyclopedia Brittanica,
1977, p725).
Menurut Hornby dalam Oxford Advanced Learner’s Dictionary of Current
English (1974, p557), “Music /’mju:zik/ n [U] is the art of making pleasing
combinations of sounds in rhythm, harmony, and counterpoint; the sounds and
composition so made; written or printed signs representing this sounds.”, yang artinya
musik adalah sebuah seni yang membuat kombinasi menyenangkan dari suara dalam
ritme, harmoni, dan counterpoint; suara dan komposisi; bentuk tertulis atau tercetak dari
tanda-tanda yang merepresentasikan suara-suara.
Dalam Encyclopedia Brittanica (1977, p724), musik adalah sebuah seni, baik
dalam suatu samaran dan lainnya, memasuki dan menyebar dalam berbagai bagian dari

34
masyarakat; musik juga sebuah seni protean yang meminjamkan dirinya dengan mudah
untuk beraliansi dengan kata-kata, seperti dalam lagu, dan dengan gerakan fisik, seperti
dalam tarian.
Di dalam sejarah, musik telah menjadi sebuah hal yang melekat pada ritual dan
drama dan telah dikreditasikan dengan kemampuan untuk merefleksikan dan
mempengaruhi emosi manusia. Budaya populer telah secara konsisten
mengeksploitasikan kemungkinan ini. Bukti yang paling nyata terdapat pada peran
musik dalam radio, film, televisi, dan teater-teater musikal masa kini. Implikasi dari
kegunaan musik dalam psikoterapi, geriatrik, dan periklanan merupakan sebuah
kesaksian dari keyakinan bahwa musik mempunyai kemampuan untuk mempengaruhi
kelakuan manusia.
Publikasi dan dokumentasi dari berbagai belahan dunia telah secara efektif
menginternasionalisasikan musik dalam perwujudan penting kebudayaan manusia.
2.4.1. Bentuk Musik
Bentuk musik atau musical form adalah sebuah keadaan untuk menggambarkan
struktur dan bentuk dari sebuah komposisi musik – yakni sebuah aransemen untuk
elemen individual yang mengkonstitusikan keseluruhannya – adalah suatu bentuk musik
(Encyclopedia Brittanica, 1977, p725).
Dalam musik, kata ‘bentuk’ secara umum digunakan dalam dua keadaan:
pertama, untuk mendenotasikan sebuah tipe standar, genre, atau spesies (contoh: simfoni,
sonata); dan kedua, untuk mendenotasikan prosedur dalam karya tertentu. Kedua arti
tersebut sering tidak dipisahkan dalam penulisan musik. Situasi ini rumit karena fakta
bahwa nomenklatur dari bentuk formal musik yang bervariasi ditentukan dalam cara

35
yang berbeda – sebagai contoh, media penampilan (string quartet, trio sonata), teknik
komposisi (fugue, variation), atau fungsi (prelude, overture, offertory).
Bentuk musik bergantung pada disposisi dari unit struktur tertentu secara
suksesif dalam suatu waktu. Prinsip dasarnya dapat dipahami dari pertimbangan singkat
mengenai melodi yang dapat didefinisikan sebagai suksesi terorganisir dari nada-nada
musikal. Suksesi dari suara ini terdiri dari bagian-bagian komponen, unit-unit struktural,
prinsip dari frase pengutaraan musik secara lengkap, korespondensi mengenai apa yang
dapat dinyanyikan dalam satu tarikan nafas atau dimainkan oleh sebuah tekanan pada
gagang senar. Sebuah melodi biasanya terdiri dari sebuah suksesi dari satu frase, dimana
bisa terjadi pengulangan (frase yang sama diulang), kontras (frase yang benar-benar
berbeda), atau variasi (frasenya berubah, namun dalam suatu cara identitas frase awal
masih terlihat). Hubungan antara komponen-komponen frase ini penting dalam suatu
bentuk musik.
Empat tipe dasar dari bentuk musik adalah:
a. Iteratif: frase yang sama diulang-ulang.
b. Reverting: pernyataan kembali sebuah frase setelah frase kontras ditampilkan.
c. Strophic: sebuah entitas melodis yang lebih besar diulang-ulang menjadi
strofi-strofi yang berbeda (stanzas) dari sebuah teks yang indah dan
menyenangkan.
d. Progresif: materi melodis baru secara berkelanjutan ditampilkan.
Tipe dasar iteratif dan reverting dapat ditemukan dalam nada-nada resitasi
nyanyian Gregorian, ballade Perancis, ballata Italia, dan bentuk bar Jerman yang
mengambil bentuk Binary, Ternary, dan Rondo. Tipe dasar Strophic dapat ditemukan

36
dalam himne dan balada tradisional. Sedangkan tipe progresif dapat ditemukan pada
lagu-lagu dan instrumentasi abad ke-19 dan 20.
Pada abad ke-20, banyak komposer terus menggunakan bentuk-bentuk
tradisional dari musik walaupun pada akhirnya, hasil kerja para komposer tersebut telah
meninggalkan hal-hal penting yang telah ditentukan sebelumnya. Komposer lain bahkan
telah membuang tipe-tipe dasar dari bentuk musik secara nyata. Elemen-elemen baru
secara radikal telah diperkenalkan untuk menyokong sebagai unit struktural: selain frase
dan motif tradisional, para komposer ini mengetengahkan apa yang disebut sebagai
‘event suara’, yakni kombinasi dari sumber-sumber, tipe-tipe timbre, agregasi dari
beberapa pitch yang terdengar berbeda, dan sebagainya.
2.4.2. Instrumen Musik
Instrumen musik atau alat musik adalah suatu alat yang dapat menghasilkan
suara musik, yang digunakan untuk upacara–upacara tertentu, hiburan, atau kenikmatan
pribadi (Encyclopedia Brittanica, 1977, p729).
Telinga manusia secara kasar dapat membedakan dua jenis alat musik, yakni alat
musik melodik yang menghasilkan nada-nada melodik; serta alat musik perkusi (ritmik)
yang menghasilkan nada-nada ritmik Dalam musik, pada umumnya instrumen musik
terbagi menjadi tiga kategori besar, yaitu alat musik senar, tiup, dan perkusi. Namun,
ilmu pengetahuan modern telah menambahkan satu kategori baru yaitu instrumen
elektronik, yang memiliki loudspeakers. Getaran loudspeakers dihasilkan oleh impuls-
impuls elektronik dimana impuls–impuls elektronik ini dapat bersifat sangat rumit dan
dapat menghasilkan suara–suara musik yang kompleks.

37
Pada saat instrumen musik dimainkan, instrumen tersebut menghasilkan
vibrations (getaran-getaran). Getaran–getaran ini menyebar melalui udara sampai masuk
ke telinga. Semua instrumen musik menghasilkan gelombang suara pada saat dimainkan,
tetapi tiap-tiap instrumen musik memiliki pola gelombang dan jangkauan frekuensi yang
berbeda – beda seperti terlihat pada gambar berikut ini:
Sumber: http://members.aol.com/pjay99site/Instrumentranges.htm
Gambar 2.6.Perkiraan jangkauan frekuensi alat musik
Gelombang suara dapat juga dikombinasikan kedalam suatu pola yang kompleks,
yang tidak dapat terlihat namun dapat terdengar. Semakin kompleks gelombang suara,
akan semakin rumit suara tersebut. Beberapa instrumen menghasilkan suara yang lebih

38
rumit dibandingkan instrumen lainnya. Beberapa instrumen yang dimainkan bersamaan
aka terdengar lebih rumit dibandingkan satu instrumen saja.
Ilmu tentang suara disebut akustik. Pembelajaran tentang suara yang dihasilkan
oleh instrumen musik disebut akustik musik.
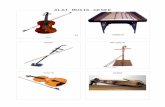
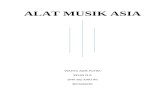
2.4.2.1. Jenis–jenis Alat Musik Senar
Alat musik senar disini berarti alat musik yang bunyinya berasal dari senar. Ada
tiga cara untuk menghasilkan suara dari alat musik senar, yaitu dengan memetik,
menggesek, memukul. Ketiga cara tersebut membuat senar bergetar. Getaran tersebut
merambat ke dalam kayu yang membentuk alat musik tersebut.
a. Harpa
Harpa merupakan alat musik petik yang telah dimainkan sejak zaman kuno
dan masih digunakan sampai saat ini dalam orkestra modern. Senar harpa modern
dibentangkan dalam suatu bingkai menyerupai bentuk segitiga (The New Book of
Knowledge, 1977, p544).
b. Kecapi
Kecapi memiliki senar yang dibentangkan melintasi suatu papan rata yang
disebut table. Suara yang dihasilkan halus tetapi sangat menyenangkan. Kecapi
merupakan salah satu alat musik terpopuler pada abad ke-16 segitiga (The New Book
of Knowledge, 1977, p544).

39
c. Biola
Sumber: (http://en.wikipedia.org/wiki/Violin.htm) Gambar 2.7. Biola
Biola seperti pada Gambar 2.7 adalah sebuah alat musik gesek berdawai yang
memiliki empat senar yang disetel berbeda satu sama lain dengan interval sempurna
kelima. Nada yang paling rendah adalah G dan biola memiliki nada tertinggi di
antara keluarga biola, yaitu viola dan cello. Alat musik gesek berdawai yang lainnya,
bas, secara teknis masuk ke dalam keluarga viol. Kertas musik untuk biola hampir
selalu menggunakan atau ditulis pada kunci G.
(http://en.wikipedia.org/wiki/Violin.htm)
d. Piano
Sumber: (http://en.wikipedia.org/wiki/Piano.htm) Gambar 2.8. Grand Piano

40
Piano adalah alat musik bersenar pukul yang paling populer saat ini. Pemukul
yang berupa palu dijalankan secara mekanik oleh papan kunci (keyboard). Piano
menghasilkan bunyinya pada saat papan kunci ditekan sehingga palu memukul senar,
lalu langsung kembali ke posisi semula. Suara yang dihasilkan dapat lembut dan
pelan, namun dapat pula keras dan kuat. Piano juga merupakan alat musik yang
serba guna, dimana piano ini tetap mengagumkan saat dimainkan secara solo,
dimainkan bersamaan dengan alat musik lain, atau dengan suara manusia. Karena
menghasilkan bunyi dengan menekan papan kunci, maka piano sering juga disebut
sebagai alat musik tekan (The New Book of Knowledge, 1977, p546).
e. Gitar
Sumber: (http://en.wikipedia.org/wiki/Guitar.htm) Gambar 2.9. Gitar
Gitar seperti pada Gambar 2.9 adalah instrumen musik yang digunakan
dalam berbagai jenis musik, dan juga lebih luas dikenal sebagai instrumen solo
klasik. Gitar paling dikenal pada budaya populer sebagai instrumen utama pada
musik blues, country, flamenco, pop, dan rock. Gitar biasanya mempunyai enam

41
senar, namun ada juga gitar dengan empat, tujuh, delapan, sepuluh, dan dua belas
senar. Gitar dibuat dan diperbaiki oleh luthier.
(http://en.wikipedia.org/wiki/Guitar.htm)
2.4.2.2. Jenis-jenis Alat Musik Tiup
Alat musik tiup di sini berarti alat musik yang menghasilkan bunyinya dari angin.
Ada dua cara untuk menghasilkan suara dari jenis alat musik ini, yaitu dengan
meniupkan udara melalui suatu ujung yang keras dan meniupkan udara melalui suatu
material fleksibel.
a. Flute dan Piccolo
Sumber: (http://en.wikipedia.org/wiki/Flute.htm) Gambar 2.10. Flute
Flute seperti pada Gambar 2.10 memiliki suara yang murni dan innocent.
Sebuah flute memiliki lubang–lubang, termasuk sebuah lubang untuk ditiup oleh
pemain. Piccolo adalah flute dalam bentuk yang lebih kecil dan menghasilkan suara
yang lebih tinggi, bahkan paling tinggi dalam orkestra (The New Book of Knowledge,
1977, p547).
b. Recorder (suling)
Recoder (suling) memiliki suatu bagian, tempat mulut pemain diletakkan
untuk meniup. Pada akhir abad ke-18, recorder dianggap sebagai alat musik yang
ketinggalan zaman. Namun akhir–akhir ini recorder menjadi populer kembali.

42
Banyak siswa – siswi sekolah yang mempelajari recorder (The New Book of
Knowledge, 1977, p547).
c. Oboe
Oboe adalah instrumen yang berbentuk menyerupai buluh panjang. Dua buah
buluh yang nyaris rata permukaannya disatukan, sehingga napas pemain mengalir di
antara kedua buluh yang disatukan tersebut dan membuatnya bergetar. Oboe dapat
digunakan sebagai instrumen solo maupun dalam orkestra (The New Book of
Knowledge, 1977, p549).
d. Klarinet
Sumber: (http://en.wikipedia.org/wiki/Clarinet.htm) Gambar 2.11. Klarinet
Klarinet seperti pada gambar 2.11 memiliki tube yang lurus, panjang,
menyerupai silinder. Dalam nada yang tinggi klarinet menghasilkan suara yang
bersih dan halus. Jika dimainkan secara solo, klarinet menghasilkan suara yang
mengagumkan. Apabila dimainkan dalam orkestra, klarinet akan sangat serasi jika
digabungkan dengan flute dan oboe (The New Book of Knowledge, 1977, p549).

43
e. Saxophone
Sumber: (http://en.wikipedia.org/wiki/Saxophone.htm) Gambar 2.12. Saxophone
Saxophone seperti pada gambar 2.12 memiliki tube yang mirip, namun
diameternya jauh lebih lebar dibandingkan oboe. Saxophone biasanya digunakan
untuk memainkan musik jazz (The New Book of Knowledge, 1977, p549).
f. Terompet
Terompet merupakan instrumen musik yang menghasilkan suara terkuat
dalam orkestra. Walaupun dimainkan secara perlahan, suara yang dihasilkan
terompet tajam dan bening (The New Book of Knowledge, 1977, p549).
g. Trombone
Trombone menyerupai terompet, namun bentuknya lebih besar. Nada yang
dihasilkanpun lebih rendah dibandingkan terompet. Suara yang dihasilkan dapat
lembut namun dapat juga sangat kuat (The New Book of Knowledge, 1977, p549).
2.4.2.3. Jenis – jenis Alat Musik Perkusi
Semua jenis alat musik perkusi menghasilkan suara pada saat dipukul dengan
tangan, jari, atau alat pendukung yang sesuai.

44
a. Drum
Sumber: (http://en.wikipedia.org/wiki/Drum.htm) Gambar 2.13. Drum
Sebuah drum seperti pada Gambar 2.13 paling tidak harus memiliki sebuah
membran yang sering disebut kepala drum atau kulit drum yang terpasang di bagian
ujung dari badan drum tersebut. Drum dapat dipukul dengan menggunakan tongkat
(stick) atau dapat juga dipukul oleh tangan sang pemain. Drum merupakan alat
musik tertua di dunia dan mudah ditemukan di bagian dunia manapun
(http://en.wikipedia.org/wiki/Drum.htm).
b. Timpani
Sumber: (http://en.wikipedia.org/wiki/Timpani.htm) Gambar 2.14. Timpani
Timpani seperti pada Gambar 2.14 hampir menyerupai drum, namun bentuk
badannya lebih menyerupai bentuk mangkuk yang terbuat dari tembaga. Bedanya

45
lagi dari drum, timpani menghasilkan suara dengan nada tertentu. Timpani dipukul
dengan menggunakan tongkat khusus yang disebut “timpani stick” atau “timpani
mallet” (http://en.wikipedia.org/wiki/Timpani.htm).
c. Cymbal
Sumber: (http://en.wikipedia.org/wiki/Cymbal.htm) Gambar 2.15. Simbal
Simbal seperti pada Gambar 2.15 terbuat dari logam, bentuknya menyerupai
piring, dan terdiri dari beraneka ukuran. Cymbal biasa digunakan dalam orkestra,
militer, konser, dan marching band (http://en.wikipedia.org/wiki/Cymbal.htm).
d. Triangle
Triangle merupakan alat musik perkusi yang berbentuk segitiga samasisi,
yang terbuat dari logam. Untuk memukulnya biasanya menggunakan tongkat kecil
khusus. Triangle menghasilkan suara yang tinggi dan nyaring.
(http://en.wikipedia.org/wiki/Triangle.htm)
e. Xylophone
Xylophone merupakan alat musik asli dari Indonesia yang terbuat dari
susunan bilah–bilah kayu beraneka ukuran, dan dipukul dengan menggunakan mallet
(tongkat) yang terbuat dari kayu, plastik, atau karet. Tiap–tiap bilah kayu
menghasilkan nada yang berbeda (http://en.wikipedia.org/wiki/Xylophone.htm).

46
f. Glockenspiel
Sumber: (http://en.wikipedia.org/wiki/Glockenspiel.htm) Gambar 2.16. Glockenspiel
Glockenspiel seperti pada Gambar 2.16 hampir sama dengan xylophone.
Bedanya, glockenspiel terbuat dari logam, dan ukurannya lebih kecil. Selain itu
suara yang dihasilkan lebih tinggi. Glockenspiel juga dikenal dengan sebutan “bell
lyra” atau “bell lyre” (http://en.wikipedia.org/wiki/Glockenspiel.htm).
2.5. Bentuk Fisik Suara
Menurut Pohlmann(2000, p1), musik adalah sebuah event akustik. Baik musik itu
hasil resonansi dari alat musik maupun diciptakan oleh sinyal-sinyal elektrik, semua
musik akan menemukan jalannya ke udara dan menjadi suara sehingga terdengar. Oleh
karena itulah, sangat penting untuk membahas tentang suara dari dasar.
Akustik dalam pembelajaran suara berhubungan dengan generasi, transmisi, dan
penyampaian gelombang suara. Keadaan dari ketiga fenomena tersebut diciptakan ketika
energi menyebabkan gangguan dalam sebuah medium.
Suara dirambatkan oleh molekul-molekul udara yang bergabung menjadi satu
dan merambatkan energi gangguan menjauh dari sumbernya. Suara membawa bentuk
longitudinal dari transmisi. Semakin pekat medium, rambatan gelombang suara akan

47
lebih mudah dilakukan. Sebagai contoh, suara berjalan lebih mudah di air daripada di
udara.
Sebuah sistem akustik dapat diakses dengan transducers, alat yang mampu untuk
mengubah energi dari bentuk energi yang satu ke bentuk energi yang lainnya. Alat ini
bekerja sebagai generator suara dan penerima suara.
Perubahan tekanan dari getaran suara dapat diproduksi baik secara periodik atau
aperiodik. Getaran periodik terbentuk dari relaksasi ke kompresi dan kembali lagi ke
relaksasi hingga membentuk satu siklus. Banyaknya siklus-siklus getaran yang melewati
suatu titik tertentu setiap detik adalah frekuensi dari gelombang suara yang diukur dalam
satuan Hertz (Hz).
Waktu yang dibutuhkan untuk terjadinya sebuah siklus disebut periode. Secara
alami, frekuensi dapat mencakup sebuah jangkauan dari sangat rendah sampai sangat
tinggi. Suara terkadang secara lepas dideskripsikan menjadi jangkauan pendek frekuensi
dari 20 Hz sampai 20 kHz yang secara kasar disebut jangkauan pendengaran manusia,
sehingga perangkat audio didesain untuk merespon frekuensi-frekuensi pada jangkauan
umum tersebut.
Panjang gelombang adalah jarak yang ditempuh suara melalui satu siklus
lengkap dengan perubahan tekanan serta pengukuran secara fisik jarak yang ditempuh
gelombang dalam satu periode. Panjang gelombang suara dapat dihitung dengan
membagi kecepatan suara dengan frekuensinya.
Suara akan mengalami difraksi, di mana suara akan berbelok melalui celah
kosong ataupun di sekitar halangan yang ada. Difraksi secara relatif bergantung pada
panjang gelombang. Gelombang yang panjang akan berdifraksi lebih tepat daripada

48
gelombang yang pendek. Walau demikian, frekuensi yang tinggi dianggap lebih terarah
secara alami.
Suara juga dapat mengalami refraksi, yakni kejadian dimana suara berbelok
karena perubahan kecepatan. Sebagai contoh, suara dapat berefraksi karena perubahan
suhu, berbelok menjauhi suhu yang lebih panas ataupun mendekati suhu yang lebih
dingin. Secara spesifik, kecepatan suara di udara meningkat sekitar 1,1 kaki per sekon
setiap peningkatan suhu sebesar 1oF. Efek lain dari perubahan suhu terhadap kecepatan
suara sangat diketahui oleh setiap pemain alat musik tiup. Karena perubahan kecepatan
dalam suara, instrumen harus dihangatkan sebelum dapat bermain pada nada yang sesuai
(perbedaannya sekitar setengah nada resmi).
Waktu yang dibutuhkan sebuah suara untuk berjalan dari satu sumber ke
penerima dapat dihitung dengan membagi jarak dengan kecepatan suara. Suara dengan
frekuensi yang lebih tinggi lebih banyak dikurangi energi bunyinya. Kelembaban juga
mempengaruhi pengurangan energi oleh udara. Secara spesifik, udara yang basah
menyerap lebih sedikit suara daripada udara yang kering. Udara yang lembab lebih
dangkal daripada udara yang kering (jumlah molekul air lebih sedikit daripada jumlah
molekul hidrogen dan oksigen) sehingga menyebabkan kecepatan suara meningkat.
Amplitudo mendeskripsikan penggantian tekanan suara di atas dan bawah
ekuilibrium level atmosfer. Jangkauan dari suara terlembut hingga terkeras, yang
menentukan jangkauan dinamis, cukup besar. Pada faktanya, telinga manusia (sistem
audio) mempunyai sebuah jangkauan dinamis dari faktor jutaan. Karena jangkauan
yang luas tersebut, sebuah rasio logaritmik digunakan untuk mengukur level tekanan
suara. Desibel (dB) menggunakan unit logaritma basis 10 untuk mencapai jangkauan

49
luas tersebut. Secara spesifik, desibel didefinisikan menjadi 10 kali logaritma dari rasio
kekuatan:
Level intensitas = 10 log (P1/P2) dB (2.32)
di mana P1 dan P2 adalah nilai dari kekuatan akustik maupun elektrik.
Bentuk paling sederhana dari gerak periodik adalah gelombang sinus.
Gelombang ini dapat digambarkan oleh osilator yang paling sederhana seperti pendulum
dan garpu tala. Gelombang sinus sangat unik karena gelombang ini hanya ada sebagai
sebuah frekuensi fundamental. Banyak alat musik yang merupakan contoh dari kasus
spesial di mana getaran harmonik berhubungan dengan fundamental melalui multiplikasi
sederhana. Sebagai contoh, sebuah bentuk gelombang fundamental yang kompleks
dengan frekuensi tinggi 150 Hz akan mempunyai nada sampingan pada frekuensi 300
Hz, 450 Hz, 600 Hz, 750 Hz, dan seterusnya.
Nada sampingan dapat melewati batas atas kemampuan mendengar manusia.
Amplitudo relatif dan fase hubungan dari nada-nada sampingan ini merupakan timbre
dari bentuk gelombang tersebut.
2.5.1. Dasar-Dasar Digital
Menurut Pohlmann (2000, p5), “Digital audio is a study of discrete values”, yang
artinya audio digital adalah pembelajaran dari nilai-nilai diskrit. Secara spesifik,
amplitudo dari suatu bentuk gelombang direpresentasikan sebagai sebuah seri dari
angka-angka. Angka memungkinkan pengaturan informasi audio dengan sangat efisien.
Pada intinya, digital audio adalah sebuah teknologi numerik.
Permasalahan mendasar yang mengkonfrontasi sistem audio digital apapun
adalah representasi dari informasi audio dalam bentuk digital. Pilihan logis yang

50
digunakan adalah sistem angka binari. Representasi dalam basis 2 ini secara ideal cocok
untuk menyimpan dan memproses informasi numerik.
Pada audio digital, angka-angka secara keseluruhan merepresentasikan informasi
audio. Simbol-simbol numerik memiliki sangat banyak fungsi; makna dari simbol-
simbol numerik dapat bervariasi sesuai dengan cara penggunaannya.
Operasi-operasi numerik yang ditampilkan dalam angka-angka adalah
permasalahan dalam interpretasi. Angka, jika dengan tepat didefinisikan, menyediakan
sebuah metode yang baik untuk menyimpan dan memproses data.
Walaupun tampaknya suara tidak berhubungan dengan angka, sebuah digital
processor mengkodekan informasi dalam bentuk angka menggunakan sistem basis 2.
Tantangan dari koding informasi audio dalam bentuk binari adalah permasalahan utama
dalam desain dan pengoperasian sistem-sistem audio digital.
Walaupun abstraksi dari bentuk matematis binari membentuk dasar dari sistem-
sistem audio digital, implementasinya memerlukan tingkat pemrosesan yang lebih tinggi,
Secara spesifik, langkah berikutnya adalah mengkodekan informasi binari. Sebagai
contoh, satuan bit binari dan angka dapat disusun menjadi kata dengan menerapkan
suatu konotasi spesifik. Dengan cara ini, kedua informasi simbolik dan numerik lebih
mudah diproses dengan sistem-sistem digital.
2.5.2. Dasar-dasar Audio Digital
Dua langkah penting dalam pengkonversian sinyal Analog ke sinyal Digital:
1. Sampling
Menurut Pohlmann (2000, p23), teorema sampling menyatakan bahwa
sebuah sinyal yang terbatas pada sebuah bandwidth dan berkelanjutan dapat

51
digantikan oleh sebuah deret sampel diskrit tanpa harus kehilangan informasi apapun
dan mendeskripsikan bagaimana sinyal asal yang berkelanjutan dapat direkonstruksi
dari sampel-sampel tersebut.
Dengan kata lain, Sampling mengkonversikan suatu sinyal waktu-kontinu
menjadi suatu sinyal waktu-diskrit yang diperoleh dengan mengambil sampel sinyal
waktu-kontinu pada saat waktu-diskrit.
Menurut Pohlmann (2000, p21), “Discrete Time Sampling is the essential
mechanism that defines a digital audio system, permits its analog-to-digital
conversion, and differentiates it from an analog system.”, yang berarti Discrete time
sampling adalah mekanisme penting yang mendefinisikan sebuah sistem audio
digital, mengijinkan kemampuannya untuk mengkonversikan sinyal analog ke digital,
dan membedakannya dari sebuah sistem analog.
Untuk memilih periode sampling atau sampling rate, beberapa informasi
tentang sinyal yang akan dijadikan sampel harus ada. Yang terutama adalah
beberapa informasi umum yang memperhatikan daya muat frekuensi sinyal. Daya
muat informasi sinyal-sinyal seperti itu terdapat amplitudo, frekuensi, dan fase dari
berbagai komponen frekuensi.
2. Kuantisasi
Menurut Pohlmann (2000, p.32) “Quantization is thus the technique of
measuring an analog audio event to form a numerical value.”, yang berarti bahwa
kuantisasi adalah teknik pengukutan sebuah event audio analog untuk membentuk
sebuah nilai numerik. Kuantisasi mengkonversikan sinyal analog yang bernilai
kontinu waktu-diskrit menjadi sinyal digital bernilai diskrit, waktu diskrit. Proses
kuantisasi adalah proses yang tidak dapat dikembalikan lagi (irreversible).

52
2.6. Pemrosesan Sinyal Digital
Seperti yang terlihat pada gambar 2.17, pemrosesan sinyal digital merupakan
tahap-tahap berupa metode yang digunakan untuk mengekstrak atau mengolah data
mentah (dari file musik yang sudah didekompresi) agar menjadi file yang berisi pola
masukan (input) yang digunakan pada proses pembelajaran (training) dan klasifikasi
pada propagasi balik (Proakis dan Manolakis, 1995, p4).
Menurut Proakis dan Manolakis (1995, p2), pemrosesan digital dari sinyal
analog mempunyai beberapa pengulangan. Pertama, dan yang terutama, konversi suatu
sinyal analog menjadi bentuk digital, yang diselesaikan dengan sampling sinyal dan
pengkuantisasian hasil sampel, menghasilkan distorsi yang mencegah rekonstruksi ulang
sinyal analog asli dari sampling yang telah dikuantisasi. Kontrol jumlah distorsi ini
dicapai dengan pemilihan laju sampling (sampling rate) yang tepat dan presisi proses
kuantisasi. Kedua, terdapat efek presisi terbatas yang harus dipertimbangkan dalam
pemrosesan digital dari sampling terkuantisasi.
Sinyal didefinisikan sebagai besaran fisik yang berubah-ubah menurut waktu,
ruang, atau variabel bebas, atau variabel-variabel lainnya.
Umumnya, suatu segmen suara dapat dinyatakan dengan derajat ketelitian yang
tinggi sebagai jumlah dari beberapa sinusoida dengan amplitudo dan frekuensi yang
berbeda.
Gambar 2.17. Diagram balok proses sistem sinyal digital
Sinyal Masukkan
Analog
Konverter Analog Digital
Proses Sinyal Digital
Konverter Digital Analog
Sinyal Keluaran Analog
Sinyal Masukkan
Digital
Sinyal Keluaran Digital

53
Keuntungan pemrosesan sinyal digital dibandingkan sinyal analog :
• Suatu sistem digital yang dapat dapat diprogram memiliki keluwesan untuk
mengkofigurasi ulang operasi-operasi pemrosesan sinyal digital secara
sederhana dengan mengubah program.
• Keakuratan, toleransi pada komponen rangkaian analog membuat hal itu
sangat sulit bagi pendesain sistem untuk mengkontrol ketepatan suatu sistam
pemrosesan sinyal analog.
• Sinyal digital mudah disimpan.
• Harga lebih rendah
Batasan-batasan Laju operasi penkonversian sinyal Analog Digital dan prosesor
sinyal digital:
• Sinyal-sinyal yang mempunyai lebar pita (bandwidth), sangat lebar
memerlukan pengkonversi Analog Digital dengan laju sampling yang cepat
dan prosesor sinyal digital yang cepat. Karena itu terdapat sinyal-sinyal
analog dengan lebar pita yang besar untuk suatu pendekatan pemrosesan
digital yang berada dia atas kondisi ilmu perangkat keras digital.
Klasifikasi sinyal :
• Sinyal-sinyal multikanal dan multidimensi
• Sinyal waktu-kontinu dan sinyal waktu-diskrit
• Sinyal bernilai-kontinu dan sinyal nilai-diskrit
Agar suatu sinyal diproses secara digital, sinyal itu harus diskrit waktunya
dan nilai-nilainya harus diskrit (dengan kata lain, hal itu harus sebagai sinyal
digital). Jika sinyal yang akan diproses berbentuk analog, sinyal

54
dikonversikan menjadi sinyal digital dengan pencuplikan sinyal analog pada
saat diskrit dalam waktu, untuk menghasilkan sinyal waktu-diskrit, dan
kemudian dengan mengkuantisasi nilai-nilainya ke suatu himpunan nilai
diskrit.
• Sinyal deterministik dan sinyal acak
Konsep frekuensi dalam sinyal waktu-kontinu dan waktu-diskrit :
• Sinyal sinusiodal waktu-kontinu
• Sinyal sinusoida waktu-diskrit
2.6.1. Analisis Fourier
Representasi sinyal Fourier memegang peranan penting dalam pemrosesan sinyal
diskrit maupun kontinu, yang menyediakan metode untuk memetakan sinyal ke dalam
domain lain (Hayes, 1999, p55).
Menurut Pohlmann (2000, p19), getaran harmonik alami dari sebuah gelombang
periodik dapat dijabarkan dalam Teorema Fourier. Teorema Fourier ini menyatakan
bahwa semua gelombang periodik yang kompleks dikomposisi dari sebuah seri
harmonik dari gelombang sinus. Lebih jauh lagi, sebuah bentuk gelombang kompleks
dapat didekomposisi menjadi isi gelombang sinus agar dapat dianalisis bentuk alami dari
gelombang kompleks ini. Sebuah transformasi matematis dapat diterapkan pada sebuah
bentuk gelombang yang direpresentasikan dalam satu waktu agar dapat diubah menjadi
representasinya dalam bentuk frekuensi. Sebagai contoh, sebuah gelombang persegi
dapat ditransformasi menjadi gelombang sinus fundamentalnya beserta urutan lebih

55
tinggi dari harmonisasi-harmonisasinya. Sebuah transformasi balik dapat membalikan
proses tersebut.
Sintesis Fourier merupakan pembentukan sinyal dengan superposisi dari
potongan-potongan gelombang sinus sedangkan analisis Fourier merupakan kebalikan
sintesis Fourier, yaitu memecah sinyal menjadi komponen-komponen sinusoidal.
Analisis Fourier merupakan suatu cara matematis yang digunakan untuk menguraikan
sinyal menjadi gelombang sinus dan kosinus. Dari gelombang sinyal suara berdomain
waktu (time – amplitudo plot), maka tidak akan diperoleh informasi yang cukup karena
informasi yang dibutuhkan terkandung di dalam frekuensi, fase, dan amplitudo dari
komponen spektral yang membentuk sinyal, yang terdapat dalam gelombang sinyal
berdomain frekuensi (frequency – amplitudo plot). Untuk dapat mengambil informasi
tersebut, diperlukan penghitungan spektrum frekuensi sinyal, mirip dengan yang terjadi
pada proses pendengaran manusia dengan menggunakan analisis Fourier.
Transformasi matematis untuk menghitung analisis Fourier disebut transformasi
Fourier yang digunakan untuk sinyal kontinu, yang dirumuskan sebagai :
( ) ( ) dtetxfX ftj ∏−
−∫= 2ω
ω
(2.33)
dan invers transformasinya, sebagai :
( ) ( ) dfefXtx ftj ∏∫−
= 2ω
ω
(2.34)
Dari persamaan diatas, ( )tx merupakan fungsi waktu, dan ( )fX merupakan
fungsi frekuensi. Variabel j merupakan akar kuadrat -1, dan e merupakan notasi
eksponen netral, yang didefinisikan sebagai berikut :

56
( ) ( )φφφ sincos je j += (2.35)
Penerapan transformasi Fourier dalam sinyal berarti mengkonversi sinyal dari
domain waktu ke dalam domain frekuensi.
2.6.2. Hamming Window
Hamming Window ditemukan oleh Richard W. Hamming, seorang ahli dalam
bidang komputer, yang digunakan untuk menyederhanakan perhitungan. Secara
matematis Hamming Window terdiri dari satu siklus kosinus, yang menaikkan dan
menghimpitkan sehingga bentuk gelombang turun dan mempunyai nilai puncak
(Steiglitz, 1996, p206). Hamming Window adalah sebuah fungsi penjendelaan yang
sangat umum, yang memberikan hasil memuaskan dengan penghitungan yang efektif
dengan meminimalkan sinyal yang terdiskontinu.
Hamming Window dirumuskan sebagai berikut (Kosko, 1992, p7):
( )⎟⎟⎠⎞
⎜⎜⎝
⎛−
−=1
..2cos46,054,0N
nhtπ 10 −≤≤ Nn (2.36)
2.6.3. Discrete Fourier Transform
Discrete Fourier Transform (DFT) digunakan untuk sinyal diskrit dengan
mentransformasikan persamaan 2.34 menjadi :
∑∫−
=
∏−
=1
0
/21 N
k
en
Nnkj
kN
F (2.37)
dengan invers transformasinya :
∑−
=
− ∏=1
0
/2N
n
Nnkjnk eFf (2.38)

57
Perhitungan dengan DFT sangat kompleks dan memakan banyak waktu. DFT
bisa dihitung secara tepat dengan menggunakan algoritma Fast Fourier Transform
(FFT) yang merupakan suatu algoritma yang efisien untuk memperoleh frekuensi sinyal
(Steiglitz, 1996, p151).
Fungsi FFT yang digunakan dalam pengenalan instrumen musik ini adalah :
( ) [ ]∑−
=⎟⎠⎞
⎜⎝⎛=
1
0
...2cosReN
i Nikixkal π (2.39)
yang mengambil nilai real, dan
( ) [ ]∑−
=⎟⎠⎞
⎜⎝⎛−=
1
0
...2sinImN
i Nikixkaginer π (2.40)
yang mengambil nilai imaginer, dan kemudian disubtitusikan menjadi sebuah nilai
magnitudo :
( ) ( ) ( )22 ImRe kaginerkalkMagnitudo += (2.41)
FFT dapat dikembalikan lagi dalam domain waktu dengan melakukan inverse
dari FFT : F : nn CC → . Inverse FFT dalam pengenalan genre musik ini dapat dihitung
dengan persamaan :
[ ] ( ) ( )∑−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=
2/
0
...2sinIm...2cosReN
k Nikkaginer
Nikkalix ππ (2.42)
Fase IFFT (Inverse Fast Fourier Transform) berfungsi untuk mengubah fungsi
amplitudo dalam domain frekuensi menjadi amplitudo dalam domain waktu (kebalikan
FFT). Data-data tersebut digunakan dalam proses ekstraksi fitur yang berhubungan
dengan permukaan musik (Musical Surface Feature Extraction).

58
2.6.4. Nilai Tengah (Mean)
Nilai tengah adalah nilai rata-rata dari sebuah bilangan, dalam hal ini khususnya
sinyal, dirumuskan sebagai berikut :
∑−
=
=1
1
1 N
iix
Nμ (2.43)
2.6.5. Standar Deviasi
Standar deviasi diperlukan menunjukkan nilai puncak yang jelas, dirumuskan
sebagai berikut :
( )∑−
=
−−
=1
0
22
11 N
iix
Nμψ (2.44)
2.7. Ekstraksi Fitur
Ekstraksi fitur merupakan proses komputasi nilai numerik yang mewakili
sebagian dari data audio, yang menghasilkan fitur-fitur baru dari data mentah dengan
menerapkan satu atau lebih transformasi berikut.
Pemilihan fitur yang baik cukup sulit dilakukan karena sebuah fitur yang buruk
tidak akan merefleksikan keadaan sebenarnya dari data pemilihan fitur yang baik. Dalam
penelitian ini digunakan fitur permukaan musik (Musical Surface Feature).
Musical surface fitures merupakan penghitungan fitur-fitur musik yang
berhubungan dengan permukaan spektral musik. Istilah musical surface atau permukaan
musik digunakan untuk menunjukkan karakteristik musik berkaitan dengan tekstur dan
instrumentasi. Fitur-fitur berikut dihitung untuk masing-masing analisis window:

59
1. Spectral Centroid
Spectral Centroid suara adalah sebuah konsep yang diambil dari pengertian
musik dan psikoakustik, merupakan titik keseimbangan spektrum yang digunakan
untuk mengukur ketajaman spektral dan sering dikaitkan dengan tingkat kejelasan
spektral, dimana semakin tinggi nilai centroid, maka suara yang ada akan semakin
jelas atau tajam (Repetto dan Polansky, 1997, p1).
Menurut Philibert (1999, p25), Spectral Centorid merepresentasikan titik
keseimbangan dari distribusi kekuatan spektral dalam sebuah frame. Spectral
Centroid dapat dihitung dengan menggunakan persamaan :
[ ][ ]∑
∑=
== N
n t
N
n T
nM
nnMC
1
1.
(2.45)
dimana [ ]nM t adalah magnitudo dari Fourer transform pada frame t dan frekuensi
adalah n .
2. Rolloff
Sama halnya dengan Spectral Centroid, rolloff digunakan untuk mengukur
ketajaman spektral. Menurut Philibert (1999, p27), nilai spektral rolloff mengukur
ke’asimetris’an bentuk spektral. Nilai rolloff akan lebih tinggi untuk distribusi yang
lebih asimestris.
Rolloff didefinisikan sebagai frekuensi R yang disamakan dengan persentase
r dari distribusi magnitudo sehingga persamaannya menjadi:
[ ] [ ]∑ ∑= =
=R
n
N
ntt nMrnM
1 1. (2.46)

60
Rolloff merupakan generalisasi spectral centroid, dimana spectral centroid
adalah rolloff untuk r =50%. Pada penelitian ini digunakan nilai rolloff sebesar 80%
yang berarti mengukur frekuensi yang berada di bawah kekuatan spektrum 80%.
3. Flux
Menurut Philibert (1999, p26), Flux yang juga dikenal sebagai Delta
Spectrum Magnitude) mengukur perbedaan spektral dari frame ke frame sehingga
dapat mengkarakterisasikan perubahan bentuk spektrum. Flux adalah vektor yang
mengukur perubahan spektral amplitudo lokal yang didefinisikan sebagai berikut :
[ ] [ ]( )∑=
−−=N
ntt nNnNF
1
21 (2.47)
dimana [ ]nNt merupakan magnitudo dari Fourier transform pada window t yang
sudah dinormalisasi.
4. Zero-Crossing Rate (ZCR)
Sebuah zero-crossing terjadi saat sampel dalam sebuah sinyal digital
mempunyai perbedaan tanda. Rata-rata dari zero-crossing dapat digunakan sebagai
sebuah ukuran sederhana dari isi frekuensi sinyal. Untuk sinyal sederhana, ZCR
berhubungan secara langsung dengan frekuensi dasar ( )0f . Sebuah sinusoid akan
melintasi garis nol dua kali dalam setiap siklus, dan oleh karena itu frekuensi dapat
ditentukan dengan membagi ZCR dengan dua. Memperoleh frekuensi dasar dari
sebuah sinyal dengan cara ini tampak mudah dan efektif, namun hal ini tidak dapat
diterapkan dalam beberapa kasus, karena sinyal terdiri dari bagina-bagian dengan
frekuensi yang lebih tinggi dari frekuensi dasar yang melinrasi garis nol beberapa
kali dalam satu siklus (Kosina, 2002, p1).

61
ZCR digunakan jika sampel dalam sebuah sinyal digital berturut-turut
mempunyai tanda yang berbeda-beda. ZCR adalah pengukur sederhana untuk noise
dari suatu sinyal yang dapat dihitung dengan menggunakan rumus :
[ ]( ) [ ]( )∑=
−−=N
n
nxsnxsZ1
1 (2.48)
dimana [ ]nx merupakan sinyal dalam domain waktu dan s merupakan sebuah
variabel dengan nilai 1 untuk argumen positif dan 0 untuk argumen negatif. Tidak
seperti spectral centroid, rolloff, dan flux yang berdasarkan pada domain frekuensi,
zero crossing rate berdasarkan domain waktu.
5. Preprocessing
Preprocessing merupakan tahap normalisasi data supaya berada dalam
rentang -1 sampai dengan 1. Tahap ini perlu dilakukan karena pada Neural Network
Back Propagation akan digunakan fungsi sigmoid bipolar. Rumus yang digunakan
untuk melakukan normalisasi interpolasi linier adalah sebagai berikut:
y = ((high-low)x)+(low-max)-(high.min) (max-min)
di mana high adalah nilai tertinggi, low adalah nilai terendah, x adalah nilai input
dan output y, max adalah nilai maksimum yang terdapat dalam data, dan min adalah
nilai minimum yang terdapat dalam data. Hasil normalisasi inilah yang akan
digunakan dalam proses klasifikasi.
(2.49)