AKSI KONTROL DASAR.pptx

of 23
-
Upload
jomantara-tresna -
Category
Documents
-
view
236 -
download
2
Transcript of AKSI KONTROL DASAR.pptx
AKSI KONTROL DASAR DAN KONTROL OTOMATIS INDUSTRI
AKSI KONTROL DASAR DANKONTROL OTOMATIS INDUSTRIAGUNG MUBYARTOJURUSAN TEKNIK ELEKTRO UNSOEDPURWOKERTOKlasifikasi kontroler automatik di industrikontroler automatik di industri diklasifikasikan sesuai dengan aksi pengontrolannya sebagai berikut:1.Kontroler dua posisi atau "on-off".2.Kontroler proporsional.3.Kontroler integral.4.Kontroler proporsional. 5.Kontroler proporsional plus turunan.6.Kontroler proporsional plus turunan plus integral.Klasifikasi kontroler automatik di industriKontroler automatik juga dapat diklasifikan sesuai dengan jenis daya yang digunakan dalam operasi, seperti kontroler pneumatickontroler hidraulikkontroler elektronik.
Jenis apa yang harus digunakan ditentukan berdasarkan sifat "plant" dan kondisi kerja, mencakup beberapa pertimbangan seperti keamanan, biaya, ketersediaan, keandalan, ketelitian, berat, dan ukuran.
Elemen- elemen kontroler automatik di industriPenguatAktuatorPlantSensorreferenKontroler otomatisDetektor kesalahanSinyal kesalahanFungsi Kontroler: mendeteksi sinyal kesalahan ( biasanya dalam level daya yang kecil ), sehingga dibutuhkan penguat sinyal. Keluaran diteruskan ke aktuator (penggerak ).Aksi KontrolKontrol Dua Posisipenggerak hanya mempunyai dua posisi tetap, yang dalam beberapa hal, benar-benar merupakan posisi "on" dan "offrelatif sederhana dan murahMisal sinyal keluaran kontroler adalah m(t) dan sinyal kesalahan penggerak adalah e(t). m(t) = M1 untuk e(t) > 0 = M2 untuk e(t) < 0sinyal m(t) akan tetap pada harga maksimum atau mini-mumnya, bergantung pada tanda sinyal kesalahan penggerak, positif atau negatifAksi Kontrol ---> dua posisiDirect on-offTerdapat daerah differential gap ( daerah dimana sinyal pembangkit kesalahan digerakkan sebelum terjadi switching ).Digunakan untuk mencegah operasi yang berulang-ulang pada mekanisme on-off.
Aksi Kontrol ---> dua posisiContoh 1. kontak bimetal. Apabila suhu panas maka keping bimetal akan melengkung sedemikian sehingga kontak terlepas sehingga elemen pemanasnya terputus kontaknya sehingga suhu akan turun. Adanya magnet menyebabkan suatu saat keping bimeta kembali akan tertarik dan menyebabkan kontak kembali bekerja dan proses pemanasan berlangsung kembali. Karena suhu naik, keping bimetal kembali melengkung dan memutus kontak dengan pemanas, sehingga proses awal berulang, dan seterusnya.
Aksi Kontrol ---> dua posisiContoh 2. pemanas ruanganSalah satu penerapan kontroler ini misalnya pada pengaturan suhu ruangan agar berada di antara dua nilai suhu rendah dan tinggi (suhu nyaman). Apabila ruangan bersuhu rendah maka kontroler bekerja untuk menaikkan suhuruangan, sebaliknya apabila suhu ruangan mencapai posisi suhu tinggi maka kontroler bekerja untuk menurunkan suhu ruangan dengan cara memutus arus pemanasnya. Karakteristik kontroler ini diperlihatkan pada gambar
Aksi Kontrol ---> dua posisiWater level using solenoid valve..How ?
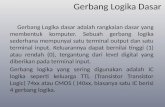
Aksi Kontrol Proporsional Kontrol Proporsionalhubungan antara keluaran kontroler m(t) dan sinyal kesalahan penggerak e(t) adalahm(t)= Kp e(t)atau dalam besaran transformasi laplaceM(s) / E(s) = Kpdi mana Kp adalah kepekaan proporsional atau penguatan.- apapun mekanismenya, pada dasarnya ini mrpkn penguatan yang dapat disetel
Aksi Kontrol ---> ProporsionalKontroler Proporsional memiliki karakteristik bahwa outputnya berupa variabel yang dikontrol berubah sebanding (Proporsional) dengan inputnya yang berupa variabel selisih (error) antara masukan acuan (reference) dengan variabel termanipulasi atau output nyata dari plant.
Aksi Kontrol ---> ProporsionalContoh. Pengaturan muka air
Buka tutup katup akan sebanding dengan posisi pelampung yang mengukur selisihantara tinggi permukaan air yang diinginkan (referensi) dengan tinggi air sesungguhnya (x).Apabila tinggi air sesungguhnya sangat rendah maka katup akan membuka lebar-lebar, sebaliknya apabila tinggi air sesungguhnya melebihi tinggi air acuan maka katup akan menutup sekecil mungkin.
Respon sistem kontrol dengan kontroler proporsional diperlihatkan pada gambar Hubungan antara variabel yang dikontrol y dengan error e dinyatakan dengan bentuk persamaan linier dengankonstanta kesebandingan (proporsional) -
Aksi Kontrol --->IntegralPada Kontrol Integral, nilai masukan diubah pada laju proporsional dari sinyal pembangkit kesalahan du(t) /dt = Ki e(t) u(t) = e(t) dtDalam bentuk Trans LaplaceU(s) / E(s) = Ki/s
Aksi Kontrol --->IntegralLaju perubahan (kecepatan) nilai output dari kontroler integral sebanding dengan nilai inputnya. Input sistem berupa variabel selisih (error) antara masukan acuan (referensi) dengan variabel termanipulasi atau output nyata dari plant.
Jadi, jika selisih acuan dengan output nyata besar maka perubahan nilai output juga besar, artinya aktuator akan mengejar selisih tersebut, sehingga diharapkan selisihnya semakin
Dibandingkan dengan kontroler proporsional, pemakaian kontroler integral relatif lebih baik dalam hal memperkecil selisih antara masukan acuan dengan output nyata. Dengan demikian, kontrolerintegral akan mendorong sistem yang dikontrol (plant) untuk mencapai output yang diinginkan, sehingga selisih (error) nya semakin kecil.
Aksi Kontrol --->IntegralAplikasi kontroler integral ini misalnya pada pengaturan level permukaan air yang melibatkan motor sebagai komponen aktuatornya, seperti diperlihatkan pada gambar
Dalam sistem tersebut, operasi buka tutup katup dilakukan oleh motor listrik. Torsi motor yang dihasilkan bergantung kepada nilai selisih antara acuan (yh) dengan output nyata (y) yang diukur melalui pelampung.
Semakin besar selisih tersebut, yaitu apabila kecepatan berkurangnya air semakin besar (misalnya saat pemakaian air yang banyak), maka torsi motor akan semakin besar dan mempercepat buka katup, sehingga air akan semakin banyak mengalir. Dengan demikian diharapkan tangki air akan terisi air lagi secara cepat sampai ketinggian yang diinginkan.
Aksi Kontrol --->Proporsional+IntegralKp menyatakan kepekaan proporsional atau penguatan, Ti menyatakan waktu integral. Baik Kp maupun Tt dapat diatur.
Waktu integral mengatur aksi kontrol integral, sedangkan Kp mempengaruhi baik bagian proporsional maupun bagian integral dari aksi kontrol.
Kebalikan dari waktu integral T, disebut laju reset;. Laju reset adalah banyaknya pengulangan bagian proporsional dari aksi pengontrolan per menit. Laju reset diukur dalam bentuk pengulangan per menit.
Aksi Kontrol --->Proporsional+IntegralKontroler PI merupakan gabungan fungsi dari kontroler Proporsional dan Integral. Penggabungan ini untuk menutupi kekurangan kontroler P yang relatif lambat responnya, sementara kontroler P digunakan untuk mempertahankan agar kontroler masih merespon meskipun untuk nilai selisih yang kecil. Respon sistem terhadap input tangga (step) dan diagram blok dari kontroler ini diperlihatkan pada gambar disamping.
Aksi Kontrol --->Proporsional+IntegralPada sistem ini, buka tutup katup berlangsung atas dasar data output nyata yang diukur melalui pelampung dan torsi motor. Torsi motor berubah berdasarkan nilai selisih antara ketinggian air nyata (y) dan tinggi air yang diinginkan (yh).Kombinasi dua mode pengontrolan ini menghasilkan operasi katup yang efektif, karena buka tutupnya menyesuaikan dengan kondisi air yang ada dalam tangki
Aksi Kontrol ---> Proporsional+Derivatif
Kp menyatakan kepekaan proporsional atau penguatanTd menyatakan waktu turunan. Baik Kp maupun Tdt dapat diatur.
Aksi kontrol turunan sering disebut sebagai kontrol laju karena besar keluaran kontroler sebanding dengan laju perubahan sinyal kesalahan penggerak.
Waktu turunan Td adalah selang waktu bertambah majunya respon aksi kontrol proporsional yang disebabkan oleh aksi laju.
Aksi Kontrol ---> Proporsional+Derivatifkarena kontroler derivatif mampu mengurangi overshoot yang terjadi dalam sistem kontrol, maka penggabungan dua tipe kontroler P dan D cukup efektif untuk mendapatkan respon sistem yang baik. Kontroler PD memadukan fungsi kontroler P dan D. Respon kontroler terhadap input lereng (ramp) dan diagram blok kontroler ini diperlihatkan pada gambar.
Aksi Kontrol ---> Proprosional+DerivatifApabila kontroler PD diterapkan pada pengaturan tinggi air maka buka tutup katupnya berdasarkan data selisih dan laju perubahan selisih antara tinggi air nyata (y) dengan tinggi air yang diinginkan (yh)
Ketika pengisian air dalam tangki penampung mencukupi maka pelampung akan bergerak keatas dan menggerakkan dua tuas. Tuas atas menggerakkan piston dalam silinder yang akan meutup katup aliran air. Tuas bawah mengimbangi gerakan oleh tekanan pegas akibat dorongan piston.
Aksi Kontrol ---> P+I+D (PID)Gabungan aksi kontrol proporsional, aksi kontrol turunan dan aksi kontrol integral membentuk Aksi kontrol proporsional plus turunan plus integral. Gabungan ini mempunyai keunggulan jika dibandingkan dengan ketiga aksi sebelumnya
Aksi Kontrol ---> P+I+D (PID)Aplikasi kontroler PID dalam sistem kontrol tinggi air dalam tangki diperlihatkan pada gambar sebelumnya. Perhatikan kontroler ini merupakan gabungan kontroler PI ,dengan kontroler jenis Derivatif.
Pengisian permukaan air setinggi h akan di ikuti oleh pergerakan pelampung yang menggerakkan baik tuas, maupun potensiometer yang memberikan umpan balik pada motor DC yang mengisi air. Jika permukaan air sesuai dengan setting, maka pelampung akan bergerak keatas. Potensiometer akan memperkecil tegangan, motor DC akan mati. Sekaligus katup akan menutup aliran air yang menuju ke bak penampung bawah.