Aksi Dasar Kontroller
26
Aksi dasar Aksi dasar Kontroller Kontroller
-
Upload
irma-tri-puspita-sari -
Category
Documents
-
view
247 -
download
1
description
sistem kontrol
Transcript of Aksi Dasar Kontroller
-
Aksi dasar Kontroller
-
Kontroller merupakan otak sistem loop kontrol, yang berfungsi :
Membandingkan output plant/nilai aktual dengan input referensi/nilai yang diinginkan /set point.Mengirim sinyal yang cocok ke elemen kontrol akhir dalam rangka menjaga variabel yang dikontrol berada pada set pointnya.
-
Jenis-jenis kontroller :
Kontroller 2 posisi atau On-OffKontroller Proposional (P)Kontroller Integral (I)Kontroller Proposional Integral (PI)Kontroller Proposional Differensial (PD)Kontroller Proposional Integral Differensial (PID)
-
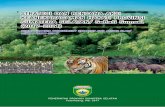
Kontroller 2 posisi atau On-OffDimana : m(t)=M1 untuk e(t) > 0 m(t)=M2 untuk e(t) < 0M1 dan M2 konstanta, umumnya M2=0 atau M1 (a) (b)
Digram blok Kontroller On-Off; Diagram blok kontroller On-Off dengan celah diferensial
-
Kontroller 2 posisi atau On-OffImplementasi fisik sederhana dan murahCelah Differensial : daerah harga sinyal kesalahan penggerak antara posisi on dan off. Digunakan untuk mencegah operasi mekanisme On-Off yang terlalu sering.Aplikasi kontroller On-Off : sistem skala besar dengan laju proses lambat. Misalnya sistem kontrol pemanas/pendingin ruangan, kulkas, dll.
-
Kontroller 2 posisi atau On-OffKontroler analog On-Off
-
Kontroller ProposionalKontroller proposional memiliki keluaran yang sebanding dengan besarnya sinyal kesalahan (error).Blok diagram kontroler proposionalDimana :M(t)=Kp.e(t) Dalam besaran transformasi laplace : M(s)=Kp.E(s); Kp=gain proposional
-
Kontroller ProposionalCiri-ciri kontroller proposional :Kalau nilai Kp kecil, kontroller proposional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat.Kalau nilai Kp dinaikkan, respon sistem menunjukan semakin cepat mencapai keadaan mantabnya.Namun jika Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berosilasi.
-
Kontroller ProposionalKontroller analog Proposional
-
Kontroller Integral (I)Berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan mantap nol (ess=0)
Blok diagram Kontroller Integral Dimana :
-
Kontroller Integral (I)Karakteristik kontroller integral antara lain :
Keluaran kontroller membutuhkan selang waktu tertentu, sehingga kontroller integral cenderung memperlambat respon.Ketika sinyal kesalahan berharga nol, keluaran kontroller akan bertahan pada nilai sebelumnya.Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai KiKonstanta integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran kontroller.
-
Kontroller Integral (I)Kontroller analog Integral
-
Kontroller Diferensial (D)Berfungsi untuk mempercepat respon awal suatu system, tetapi tidak memperkecil kesalahan pada keadaan tunaknya. Blok diagram kontroller diferensial
-
Kontroller Diferensial (D)Karakteristik controller differential adalah sebagai berikut :
Kontroller ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada inputnya (berupa error)Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan kontroller tergantung pada nilai Td dan laju perubahan sinyal kesalahan.Mempunyai suatu karakter untuk mendahului, sehingga kontroller ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi besar. Jadi kontroller diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas system.
Berdasarkan karakteristiknya, kontroller diferensial tidak pernah digunakan tanpa ada kontroller lain
-
Kontroller Proposional + IntegralDiagram blok kontroller PI :Kp: Konstanta proposional (adjustable)Ti : Waktu Integral (adjustable): Laju reset : berapa kali bagian proposional dari aksi pengontrolan diulangi dalam waktu 1 menit.Aplikasi : Sistem dengan perubahan beban besar yang tak terlalu cepat (perlu waktu integrasi)
-
Kontroller Proposional + IntegralCiri-ciri kontroller PIAksi integral bukan untuk mengembalikan ke error nol, tapi menjaga pada harga yang ia muncul di sepanjang waktu, sehingga ada output yang cukup untuk membuka control valve.Nilai Ki > Kp untuk mengurangi overshoot dan meniadakan steady state errorRespon lebih lambat, karena error tidak dapat dihilangkan dengan cepat.Disebut pula reset action
-
Kontroller Proposional + DiferensialBlok diagram kontroller proposional + diferensialKp : Konstanta proposional (adjustable)Td : Waktu diferensial (adjustable)
-
Kontroller Proposional + DiferensialCiri-ciri kontroller PD :Disebut juga anticipatory/rate controlAksi control didasarkan pada mode diferensial yang terjadi hanya saat error berubahEfeknya mirip dengan proposional dengan gain yang tinggiResponnya sangat cepatOvershoot sangat rendahAda offset tapi lebih kecil
-
Kontroller Proposional Integral Diferensial (PID)Paling baik, tapi paling mahal.Offset dihilangkan dengan aksi integral, sedangkan aksi diferensial menurunkan overshoot dan waktu osilasiDigunakan pada sistem yang agak lambat.Blok diagram kontroller PID