72681707 jam-digital-at-mega-16
23
PROPOSAL PERENCANAAN DAN FABRIKASI RANGKAIAN ELEKTRONIKA ”Pemanfaatan mcu atmega sebagai jam digital dengan fasilitas alarm” Disusun oleh: ANAS AMINULLAH (02) CAMELIA ARIZONA (08) DICHA DESI ANINDA (09) GANJAR GANDHI S (10) 2A / KELOMPOK 4 PROGRAM STUDI TEKNIK TELEKOMUNIKASI POLITEKNIK NEGERI MALANG 2011
-
Upload
satria-speed -
Category
Data & Analytics
-
view
742 -
download
1
Transcript of 72681707 jam-digital-at-mega-16
PROPOSAL
PERENCANAAN DAN FABRIKASI RANGKAIAN ELEKTRONIKA
”Pemanfaatan mcu atmega sebagai jam digital dengan fasilitas alarm”
Disusun oleh:
ANAS AMINULLAH (02)
CAMELIA ARIZONA (08)
DICHA DESI ANINDA (09)
GANJAR GANDHI S (10)
2A / KELOMPOK 4
PROGRAM STUDI TEKNIK TELEKOMUNIKASI
POLITEKNIK NEGERI MALANG
2011
ii
DAFTAR ISI
Daftar isi ii
BAB I PENDAHULUAN 1
1.1. Latar Belakang 1
1.2. Rumusan Masalah 1
1.3. Batasan Masalah 2
1.4. Manfaat 2
BAB II LANDASAN TEORI 3
2.1. JAM DIGITAL 3
2.2. COUNTER / PENCACAH DIGITAL 4
2.3. MIKROKONTROLLER 5
2.4. ATMEGA 16 6
2.5. SEVEN SEGMEN 8
2.6. ALARM 9
BAB III PERENCANAAN 10
3.1. Gambar rangkaian 10
3.2. Listing program 10
3.3. Perhitungan arus power supply 15
3.4. Pembuatan jalur rangkaian 16
3.5. Penyablonan 17
BAB IV METODOLOGI 18
4.1. Pengumpulan Teori 19
4.2. Pemahaman Teori 19
4.3. Perencanaan 19
4.4. Pembuatan Program 19
4.5. Simulasi 19
4.6. Fabrikasi 20
4.7. Pengetesan 20
DAFTAR PUSTAKA 21
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Pada era sekarang ini kebanyakan barang – barang elektronik dalam
penerapannya menggunakan prinsip – prinsip logika atau yang dinamakan prinsip
digital, dengan semakin maju cara berfikir kita, semakin bermacam - macam pula
variasi suatu barang elektronika yang memanfaatkan prinsip rangkaian logika atau
digital ini. Sehingga sekarang tidak menutup kemungkinan jika dimana – mana
menemukan bermacam – macam alat yang memanfaatkan fungsi tersebut.
Berdasarkan fakta diatas, maka kami ingin membuat suatu rangkaian
sederhana yang memanfaatkan prinsip kerja rangkaian logika atau digital, lebih
jelasnya kami mencoba mempraktekan teori yang sebelumnya telah kami dapatkan
kedalam bentuk sebuah rangkaian yaitu jam digital.
Jam digital merupakan perangkat elektronik yang sangat sederhana atau
sudah terlalu umum, tapi dari jam digital dapat dipelajari prinsip-prinsip dasar control
dengan mikrokontroler, antara lain sitem tampilan 7 ruas dan pemakaian timer.
Jam digital umumnya menggunakan 50 atau 60 hertz osilator AC atau kristal
osilator seperti dalam jam kuarsa untuk menjalankannya. Kebanyakan jam digital
menampilkan jam dalam format hari 24 jam, di Amerika dan beberapa negara lain
menggunakan pewaktu dalam format 12 jam dengan indikasi pembeda "AM" atau
"PM".
Jam elektronika digital yang terdiri dari pencacah yang merupakan komponen
terpenting dari sistem jam digital. Kebanyakan jam menggunakan daya frekuensi
jala-jala 60 Hz sebagai masukannya. Frekuensi ini dibagi menjadi detik, menit dan
jam oleh bagian pembagi frekuensi dari jam tersebut. Kemudian pulsa satu-per-detik,
satu-per-menit, dan satu-per-jam dihitung dan disimpan dalam akumulator pencacah
jam tersebut. Selanjutnya isi akumulator pencacah (detik, menit, jam) yang tersimpan
didekode, dan waktu yang tepat ditayangkan pada tayangan waktu keluaran. Jam
digital mempunyai elemen sistem khusus. Pengolahan terjadi pada pembagi
frekuensi, akumulator pencacah.
1.2. Rumusan Masalah
1.2.1. Bagaimana membuat jam digital dengan menggunakan mikrokontroler.
1.2.2. Bagaimana program mikrokontroler dalam pembuatan jam digital.
2
1.3. Batasan Masalah
1.3.1. Pembuatan dengan menggunakan IC mikrokontroler atmega.
1.3.2. Jam digital ditampilkan dengan seven segment.
1.4. Manfaat
Jam digital yang dibuat digunakan untuk menunjukkan waktu dalam
kehidupan sehari-hari.
3
BAB II
LANDASAN TEORI
2.1. JAM DIGITAL
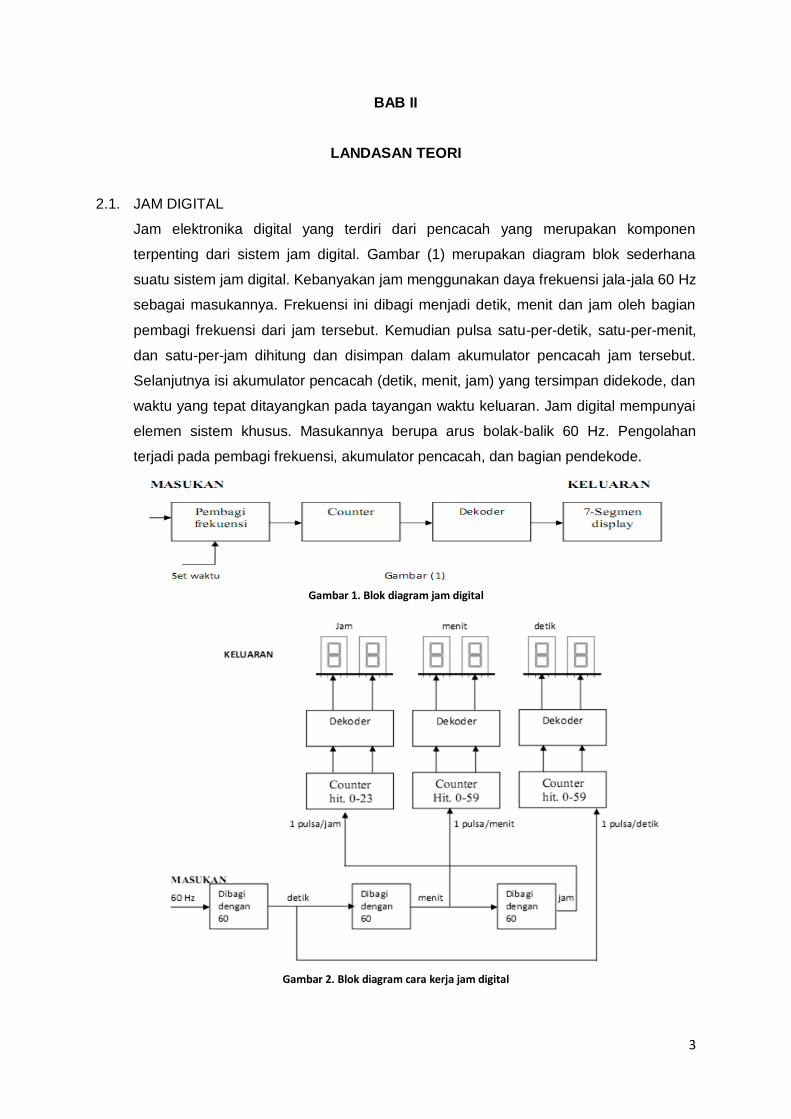
Jam elektronika digital yang terdiri dari pencacah yang merupakan komponen
terpenting dari sistem jam digital. Gambar (1) merupakan diagram blok sederhana
suatu sistem jam digital. Kebanyakan jam menggunakan daya frekuensi jala-jala 60 Hz
sebagai masukannya. Frekuensi ini dibagi menjadi detik, menit dan jam oleh bagian
pembagi frekuensi dari jam tersebut. Kemudian pulsa satu-per-detik, satu-per-menit,
dan satu-per-jam dihitung dan disimpan dalam akumulator pencacah jam tersebut.
Selanjutnya isi akumulator pencacah (detik, menit, jam) yang tersimpan didekode, dan
waktu yang tepat ditayangkan pada tayangan waktu keluaran. Jam digital mempunyai
elemen sistem khusus. Masukannya berupa arus bolak-balik 60 Hz. Pengolahan
terjadi pada pembagi frekuensi, akumulator pencacah, dan bagian pendekode.
Gambar 1. Blok diagram jam digital
Gambar 2. Blok diagram cara kerja jam digital
4
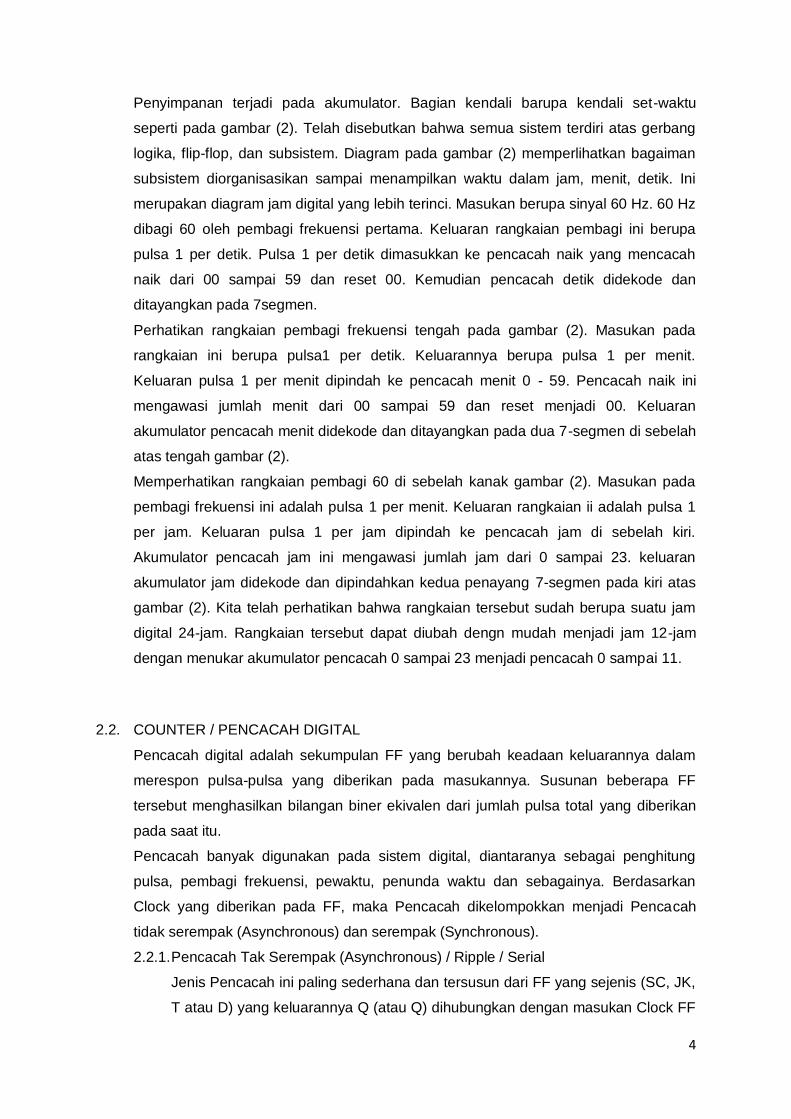
Penyimpanan terjadi pada akumulator. Bagian kendali barupa kendali set-waktu
seperti pada gambar (2). Telah disebutkan bahwa semua sistem terdiri atas gerbang
logika, flip-flop, dan subsistem. Diagram pada gambar (2) memperlihatkan bagaiman
subsistem diorganisasikan sampai menampilkan waktu dalam jam, menit, detik. Ini
merupakan diagram jam digital yang lebih terinci. Masukan berupa sinyal 60 Hz. 60 Hz
dibagi 60 oleh pembagi frekuensi pertama. Keluaran rangkaian pembagi ini berupa
pulsa 1 per detik. Pulsa 1 per detik dimasukkan ke pencacah naik yang mencacah
naik dari 00 sampai 59 dan reset 00. Kemudian pencacah detik didekode dan
ditayangkan pada 7segmen.
Perhatikan rangkaian pembagi frekuensi tengah pada gambar (2). Masukan pada
rangkaian ini berupa pulsa1 per detik. Keluarannya berupa pulsa 1 per menit.
Keluaran pulsa 1 per menit dipindah ke pencacah menit 0 - 59. Pencacah naik ini
mengawasi jumlah menit dari 00 sampai 59 dan reset menjadi 00. Keluaran
akumulator pencacah menit didekode dan ditayangkan pada dua 7-segmen di sebelah
atas tengah gambar (2).
Memperhatikan rangkaian pembagi 60 di sebelah kanak gambar (2). Masukan pada
pembagi frekuensi ini adalah pulsa 1 per menit. Keluaran rangkaian ii adalah pulsa 1
per jam. Keluaran pulsa 1 per jam dipindah ke pencacah jam di sebelah kiri.
Akumulator pencacah jam ini mengawasi jumlah jam dari 0 sampai 23. keluaran
akumulator jam didekode dan dipindahkan kedua penayang 7-segmen pada kiri atas
gambar (2). Kita telah perhatikan bahwa rangkaian tersebut sudah berupa suatu jam
digital 24-jam. Rangkaian tersebut dapat diubah dengn mudah menjadi jam 12-jam
dengan menukar akumulator pencacah 0 sampai 23 menjadi pencacah 0 sampai 11.
2.2. COUNTER / PENCACAH DIGITAL
Pencacah digital adalah sekumpulan FF yang berubah keadaan keluarannya dalam
merespon pulsa-pulsa yang diberikan pada masukannya. Susunan beberapa FF
tersebut menghasilkan bilangan biner ekivalen dari jumlah pulsa total yang diberikan
pada saat itu.
Pencacah banyak digunakan pada sistem digital, diantaranya sebagai penghitung
pulsa, pembagi frekuensi, pewaktu, penunda waktu dan sebagainya. Berdasarkan
Clock yang diberikan pada FF, maka Pencacah dikelompokkan menjadi Pencacah
tidak serempak (Asynchronous) dan serempak (Synchronous).
2.2.1. Pencacah Tak Serempak (Asynchronous) / Ripple / Serial
Jenis Pencacah ini paling sederhana dan tersusun dari FF yang sejenis (SC, JK,
T atau D) yang keluarannya Q (atau Q) dihubungkan dengan masukan Clock FF
5
berikutnya, sehingga semua keluaran FF tidak berubah bersamaan dengan
adanya pulsa Clock. Perubahan keadaan keluaran tiap FF terjadi pada setiap
sisi naik (atau turun) dari masukan Clocknya.
Suatu Pencacah yang apabila perubahan hitungan keluarannya naik dari
hitungan awalnya (misalnya 0000) dinamakan Pencacah naik / maju (Up-
Counter). Sebaliknya, apabila perubahan hitungan keluarannya turun dari
hitungan awalnya (misalnya 1111) dinamakan Pencacah turun / mundur (Down-
Counter). Jumlah masukan pulsa Clock yang menyebabkan Pencacah kembali
ke hitungan awalnya dinamakan modulus Pencacah, yaitu jumlah total keadaan
keluaran yang berbeda (termasuk nol) dari Pencacah yang dinyatakan :
Jumlah Modulus Pencacah = 2N N = Jumlah FF
2.2.2. Pencacah Serempak (Synchronous) / Paralel
Pada Pencacah biner sinkron, Clocknya dihubungkan dengan setiap masukan
Clock FF, untuk itu setiap pemberian pulsa Clock akan menyebabkan semua
keluaran juga berubah secara serentak. Hitungan pada Pencacah sinkron tidak
hanya seperti Pencacah ripple yaitu berurutan, tetapi bisa melompat atau
bahkan hitungan acak. Dalam merancang rangkaian Pencacah sinkron dengan
hitungan tertentu harus mengetahui jenis FF yang digunakan, karena setiap FF
mempunyai keluaran yang berbeda terhadap adanya pulsa Clock. Untuk itu
harus mengetahui setiap perubahan keadaan keluaran FF sehubungan dengan
hitungan yang diinginkan.
2.3. MIKROKONTROLLER
Mikrokontroller adalah sistem mikroprosesor lengkap yang terkandung di dalam
sebuah chip. Mikrokontroler berbeda dari mikroprosesor serba guna yang digunakan
dalam sebuah PC, karena sebuah mikrokontroler umumnya telah berisi komponen
pendukung sistem minimal mikroprosesor, yakni memori dan antarmuka I/O.
Sistem komputer dewasa ini paling banyak justru terdapat di dalam peralatan lain,
seperti telepon, jam, perangkat rumah tangga, kendaraan, dan bangunan. Sistem
embedded biasanya mengandung syarat minimal sebuah sistem mikroprosesor yaitu
memori untuk data dan program, serta sistem antarmuka input/output yang sederhana.
Antarmuka semacam keyboard, tampilan, disket, atau printer yang umumnya ada
pada sebuah komputer pribadi justru tidak ada pada sistem mikrokontroler. Sistem
mikrokontroler lebih banyak melakukan pekerjaan-pekerjaan sederhana yang penting
seperti mengendalikan motor, saklar, resistor variabel, atau perangkat elektronis lain.
Seringkali satu-satunya bentuk antarmuka yang ada pada sebuah sistem
6
mikrokontroler hanyalah sebuah LED, bahkan ini pun bisa dihilangkan jika tuntutan
konsumsi daya listrik mengharuskan demikian.
Berbeda dengan CPU serba-guna, mikrokontroler tidak selalu memerlukan memori
eksternal, sehingga mikrokontroler dapat dibuat lebih murah dalam kemasan yang
lebih kecil dengan jumlah pin yang lebih sedikit.
Sebuah chip mikrokontroler umumnya memiliki fitur:
central processing unit - mulai dari prosesor 4-bit yang sederhana hingga prosesor
kinerja tinggi 64-bit.
input/output antarmuka jaringan seperti port serial (UART)
antarmuka komunikasi serial lain seperti I²C, Serial Peripheral Interface and
Controller Area Network untuk sambungan sistem
periferal seperti timer dan watchdog
RAM untuk penyimpanan data
ROM, EPROM, EEPROM atau Flash memory untuk menyimpan program komputer
pembangkit clock - biasanya berupa resonator rangkaian RC
pengubah analog-ke-digital
Sejarah mikrokontroller
Mikrokontroler populer yang pertama dibuat oleh Intel pada tahun 1976, yaitu
mikrokontroler 8-bit Intel 8748. Mikrokontroler tersebut adalah bagian dari keluarga
mikrokontroler MCS-48. Sebelumnya, Texas instruments telah memasarkan
mikrokontroler 4-bit pertama yaitu TMS 1000 pada tahun 1974. TMS 1000 yang mulai
dibuat sejak 1971 adalah mikrokomputer dalam sebuah chip, lengkap dengan RAM
dan ROM.
2.4. ATMEGA 16
AVR merupakan seri mikrokontroler CMOS 8-bit buatan Atmel, berbasis arsitektur
RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam
satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel
dengan mode compare, interrupt internal dan eksternal, serial UART, programmable
Watchdog Timer, dan mode power saving, ADC dan PWM internal. AVR juga
mempunyai In-System Programmable Flash on-chip yang mengijinkan memori
program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
ATMega16. ATMega16 mempunyai throughput mendekati 1 MIPS per MHz membuat
disainer sistem untuk mengoptimasi konsumsi daya versus kecepatan proses.
7
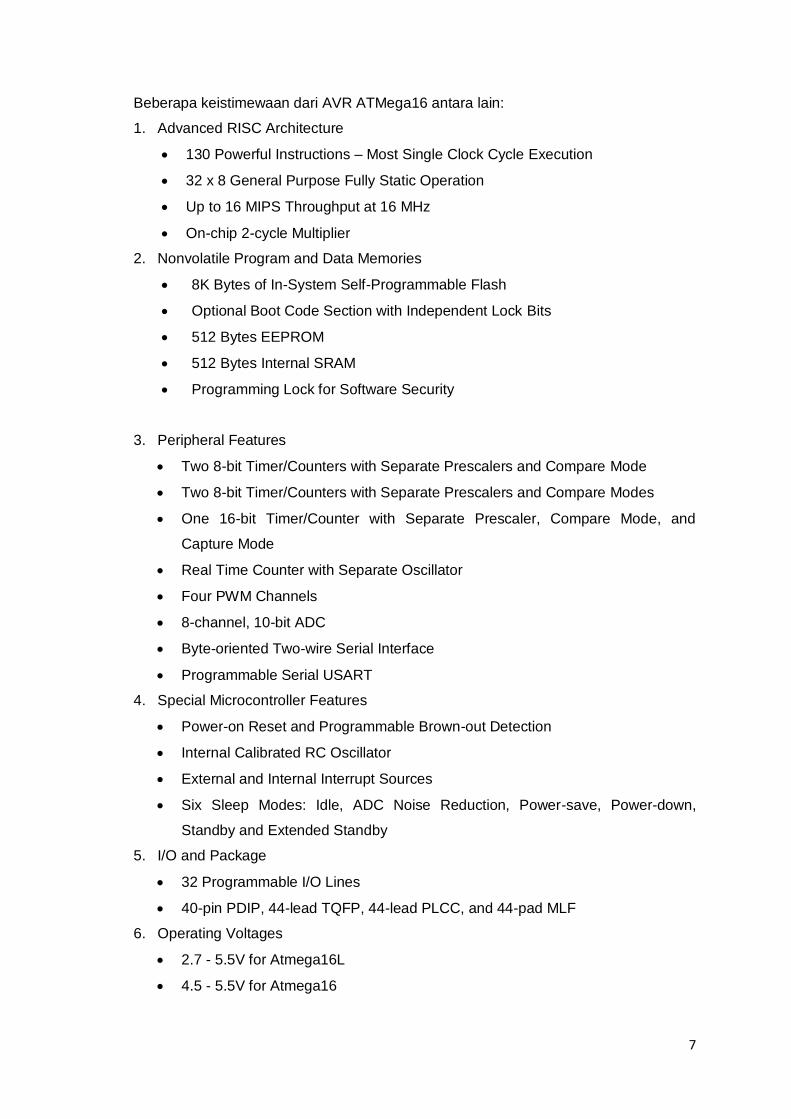
Beberapa keistimewaan dari AVR ATMega16 antara lain:
1. Advanced RISC Architecture
130 Powerful Instructions – Most Single Clock Cycle Execution
32 x 8 General Purpose Fully Static Operation
Up to 16 MIPS Throughput at 16 MHz
On-chip 2-cycle Multiplier
2. Nonvolatile Program and Data Memories
8K Bytes of In-System Self-Programmable Flash
Optional Boot Code Section with Independent Lock Bits
512 Bytes EEPROM
512 Bytes Internal SRAM
Programming Lock for Software Security
3. Peripheral Features
Two 8-bit Timer/Counters with Separate Prescalers and Compare Mode
Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and
Capture Mode
Real Time Counter with Separate Oscillator
Four PWM Channels
8-channel, 10-bit ADC
Byte-oriented Two-wire Serial Interface
Programmable Serial USART
4. Special Microcontroller Features
Power-on Reset and Programmable Brown-out Detection
Internal Calibrated RC Oscillator
External and Internal Interrupt Sources
Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power-down,
Standby and Extended Standby
5. I/O and Package
32 Programmable I/O Lines
40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF
6. Operating Voltages
2.7 - 5.5V for Atmega16L
4.5 - 5.5V for Atmega16
8
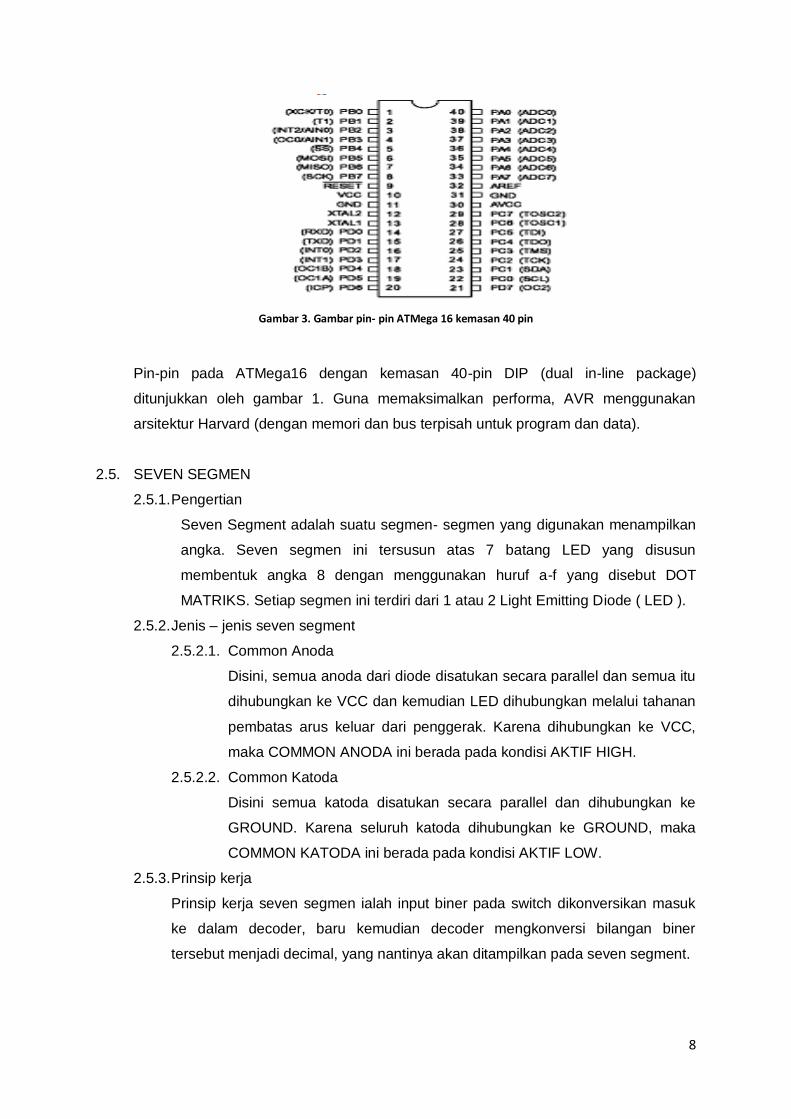
Gambar 3. Gambar pin- pin ATMega 16 kemasan 40 pin
Pin-pin pada ATMega16 dengan kemasan 40-pin DIP (dual in-line package)
ditunjukkan oleh gambar 1. Guna memaksimalkan performa, AVR menggunakan
arsitektur Harvard (dengan memori dan bus terpisah untuk program dan data).
2.5. SEVEN SEGMEN
2.5.1. Pengertian
Seven Segment adalah suatu segmen- segmen yang digunakan menampilkan
angka. Seven segmen ini tersusun atas 7 batang LED yang disusun
membentuk angka 8 dengan menggunakan huruf a-f yang disebut DOT
MATRIKS. Setiap segmen ini terdiri dari 1 atau 2 Light Emitting Diode ( LED ).
2.5.2. Jenis – jenis seven segment
2.5.2.1. Common Anoda
Disini, semua anoda dari diode disatukan secara parallel dan semua itu
dihubungkan ke VCC dan kemudian LED dihubungkan melalui tahanan
pembatas arus keluar dari penggerak. Karena dihubungkan ke VCC,
maka COMMON ANODA ini berada pada kondisi AKTIF HIGH.
2.5.2.2. Common Katoda
Disini semua katoda disatukan secara parallel dan dihubungkan ke
GROUND. Karena seluruh katoda dihubungkan ke GROUND, maka
COMMON KATODA ini berada pada kondisi AKTIF LOW.
2.5.3. Prinsip kerja
Prinsip kerja seven segmen ialah input biner pada switch dikonversikan masuk
ke dalam decoder, baru kemudian decoder mengkonversi bilangan biner
tersebut menjadi decimal, yang nantinya akan ditampilkan pada seven segment.

9
2.6. ALARM
Alarm secara umum dapat didefinisikan sebagai bunyi peringatan atau pemberitahuan.
Dalam istilah jaringan, alarm dapat juga didefinisikan sebagai pesan berisi
pemberitahuan ketika terjadi penurunan atau kegagalan dalam penyampaian sinyal
komunikasi data ataupun ada peralatan yang mengalami kerusakan (penurunan
kinerja). Pesan ini digunakan untuk memperingatkan operator atau administrator
mengenai adanya masalah (bahaya) pada jaringan. Alarm memberikan tanda bahaya
berupa sinyal, bunyi, ataupun sinar.
10
BAB III
PERENCANAAN
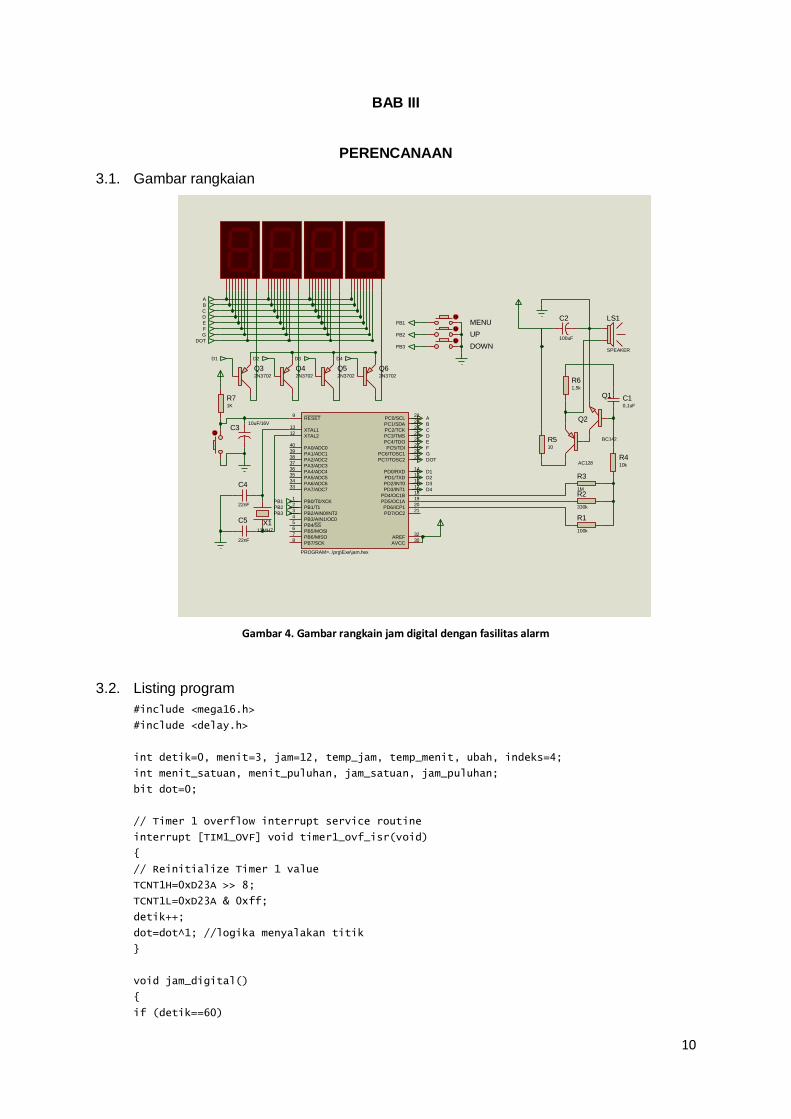
3.1. Gambar rangkaian
Gambar 4. Gambar rangkain jam digital dengan fasilitas alarm
3.2. Listing program
#include <mega16.h>
#include <delay.h>
int detik=0, menit=3, jam=12, temp_jam, temp_menit, ubah, indeks=4;
int menit_satuan, menit_puluhan, jam_satuan, jam_puluhan;
bit dot=0;
// Timer 1 overflow interrupt service routine
interrupt [TIM1_OVF] void timer1_ovf_isr(void)
{
// Reinitialize Timer 1 value
TCNT1H=0xD23A >> 8;
TCNT1L=0xD23A & 0xff;
detik++;
dot=dot^1; //logika menyalakan titik
}
void jam_digital()
{
if (detik==60)
PB0/T0/XCK1
PB1/T12
PB2/AIN0/INT23
PB3/AIN1/OC04
PB4/SS5
PB5/MOSI6
PB6/MISO7
PB7/SCK8
RESET9
XTAL212
XTAL113
PD0/RXD14
PD1/TXD15
PD2/INT016
PD3/INT117
PD4/OC1B18
PD5/OC1A19
PD6/ICP120
PD7/OC221
PC0/SCL22
PC1/SDA23
PC2/TCK24
PC3/TMS25
PC4/TDO26
PC5/TDI27
PC6/TOSC128
PC7/TOSC229
PA7/ADC733
PA6/ADC634
PA5/ADC535
PA4/ADC436
PA3/ADC337
PA2/ADC238
PA1/ADC139
PA0/ADC040
AREF32
AVCC30
PROGRAM=..\prg\Exe\jam.hex
X112MHZ
C4
22nF
C5
22nF
R71K
C310uF/16V
D1
D2
D3
D4
Q32N3702
Q42N3702
Q52N3702
Q62N3702
A
B
C
D
E
F
G
DOT
D1 D2 D3 D4
A
B
C
D
E
F
G
DOT
UP
MENU
DOWN
PB1
PB2
PB3
PB1
PB2
PB3
R1
100k
R2
330k
R3
1M
R410k
Q1
BC142
Q2
AC128
C10,1uF
R510
R61,5k
LS1
SPEAKER
C2
100uF
11
{
detik=0;
menit++;
}
if (menit==60)
{
menit=0;
jam++;
}
if (jam==24)
{
jam=0;
}
}
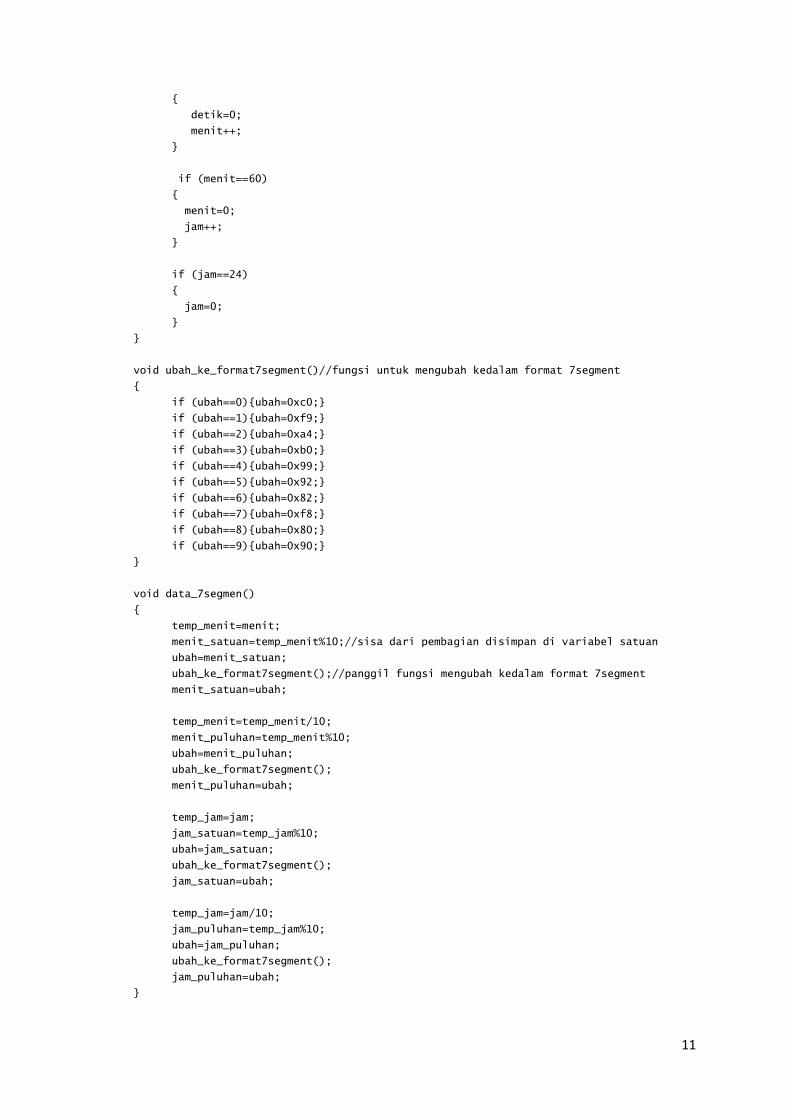
void ubah_ke_format7segment()//fungsi untuk mengubah kedalam format 7segment
{
if (ubah==0){ubah=0xc0;}
if (ubah==1){ubah=0xf9;}
if (ubah==2){ubah=0xa4;}
if (ubah==3){ubah=0xb0;}
if (ubah==4){ubah=0x99;}
if (ubah==5){ubah=0x92;}
if (ubah==6){ubah=0x82;}
if (ubah==7){ubah=0xf8;}
if (ubah==8){ubah=0x80;}
if (ubah==9){ubah=0x90;}
}
void data_7segmen()
{
temp_menit=menit;
menit_satuan=temp_menit%10;//sisa dari pembagian disimpan di variabel satuan
ubah=menit_satuan;
ubah_ke_format7segment();//panggil fungsi mengubah kedalam format 7segment
menit_satuan=ubah;
temp_menit=temp_menit/10;
menit_puluhan=temp_menit%10;
ubah=menit_puluhan;
ubah_ke_format7segment();
menit_puluhan=ubah;
temp_jam=jam;
jam_satuan=temp_jam%10;
ubah=jam_satuan;
ubah_ke_format7segment();
jam_satuan=ubah;
temp_jam=jam/10;
jam_puluhan=temp_jam%10;
ubah=jam_puluhan;
ubah_ke_format7segment();
jam_puluhan=ubah;
}
12
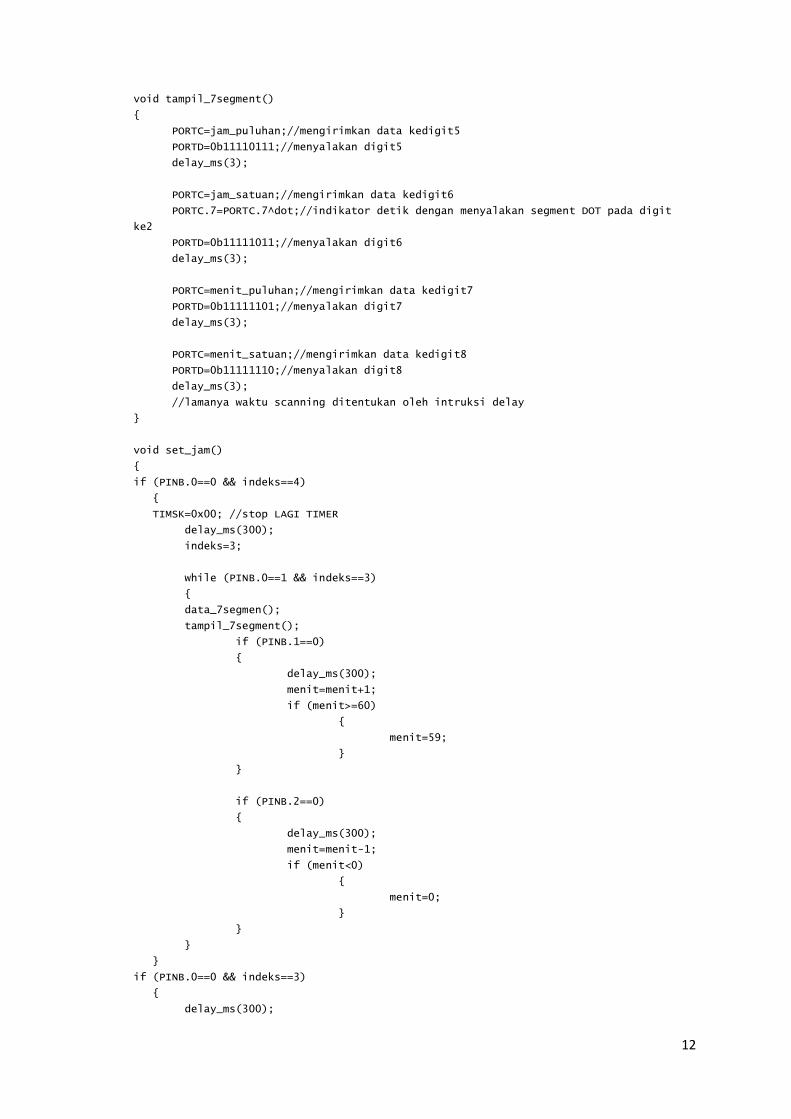
void tampil_7segment()
{
PORTC=jam_puluhan;//mengirimkan data kedigit5
PORTD=0b11110111;//menyalakan digit5
delay_ms(3);
PORTC=jam_satuan;//mengirimkan data kedigit6
PORTC.7=PORTC.7^dot;//indikator detik dengan menyalakan segment DOT pada digit
ke2
PORTD=0b11111011;//menyalakan digit6
delay_ms(3);
PORTC=menit_puluhan;//mengirimkan data kedigit7
PORTD=0b11111101;//menyalakan digit7
delay_ms(3);
PORTC=menit_satuan;//mengirimkan data kedigit8
PORTD=0b11111110;//menyalakan digit8
delay_ms(3);
//lamanya waktu scanning ditentukan oleh intruksi delay
}
void set_jam()
{
if (PINB.0==0 && indeks==4)
{
TIMSK=0x00; //stop LAGI TIMER
delay_ms(300);
indeks=3;
while (PINB.0==1 && indeks==3)
{
data_7segmen();
tampil_7segment();
if (PINB.1==0)
{
delay_ms(300);
menit=menit+1;
if (menit>=60)
{
menit=59;
}
}
if (PINB.2==0)
{
delay_ms(300);
menit=menit-1;
if (menit<0)
{
menit=0;
}
}
}
}
if (PINB.0==0 && indeks==3)
{
delay_ms(300);
13
indeks=2;
while (PINB.0==1 && indeks==2)
{
data_7segmen();
tampil_7segment();
if (PINB.1==0)
{
delay_ms(300);
menit=menit+10;
if (menit>=60)
{
menit=59;
}
}
if (PINB.2==0)
{
delay_ms(300);
menit=menit-10;
if (menit<0)
{
menit=0;
}
}
}
}
if (PINB.0==0 && indeks==2)
{
delay_ms(300);
indeks=1;
while (PINB.0==1 && indeks==1)
{
data_7segmen();
tampil_7segment();
if (PINB.1==0)
{
delay_ms(300);
jam=jam+1;
if (jam>=60)
{
jam=59;
}
}
if (PINB.2==0)
{
delay_ms(300);
jam=jam-1;
if (jam<0)
{
jam=0;
}
}
}
}
if (PINB.0==0 && indeks==1)
14
{
delay_ms(300);
indeks=0;
while (PINB.0==1 && indeks==0)
{
data_7segmen();
tampil_7segment();
if (PINB.1==0)
{
delay_ms(300);
jam=jam+1;
if (jam>=60)
{
jam=59;
}
}
if (PINB.2==0)
{
delay_ms(300);
jam=jam-1;
if (jam<0)
{
jam=0;
}
}
}
indeks=4;
TIMSK=0x04; //MEMULAI LAGI TIMER
delay_ms(300);
}
}
void alarm()
{
If (menit==15){PIND.4==1;}
else {PIND.4==0;}
if (menit==30){PIND.5==1;}
else {PIND.5==0;}
if (menit==0){PIND.5==1;}
else {PIND.5==0;}
}
void main(void)
{
PORTB=0xff;
DDRB=0x00;
PORTC=0xff;
DDRC=0xff;
PORTD=0xff;
DDRD=0xff;
// Timer/Counter 1 initialization
// Clock source: System Clock
15
// Clock value: 11.719 kHz
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: On
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x05;
TCNT1H=0xD2;
TCNT1L=0x3A;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x04;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// Global enable interrupts
#asm("sei")
while (1)
{
set_jam();
jam_digital();
data_7segmen();
tampil_7segment();
alarm();
};
}
3.3. Perhitungan arus power supply
3.3.1. Arus untuk seven segment
Sebuah seven segment membutuhkan arus sebesar 10 - 20 mA, sehingga
dengan menggunakan 4 seven segment maka arus yang diperlukan kurang
lebih 40 - 80 mA.
3.3.2. Arus mikrokontroller ATMega 16
Sebuah mikrokontroller atmega membuuhkan 20 mA
16
3.3.3. Arus total yang harus disediakan oleh power supply
Dengan arus seven segment yang 80 mA dan mcu ATMega 16 yang 20 mA,
maka powersupply yang digunakan harus mampu menyediakan arus sebesar
100 mA. Sehingga untuk lebih aman power supply yang digunakan
menghasilkan paling tidak 5X arus yang diperlukan.
3.4. Pembuatan jalur rangkaian
Pada perencanaan jalur rangkaian diatas bisa menggunakan bantuan softwere
seperti protel,visio dll.
Hal – hal yang perlu diperhatikan :
1. memperhatikan lebar jalur yang dibutuhkan guna meningkatkan efesiensi arus dan
tempat.
2. Disisi lain kita harus mempersiapkan komponen yang dibutuhkan sesuai rangkaian
yang telah kita rancang.
3. Mengecek keberadaan jalur,sehingga benar-benar sesuai dengan rangkaian diatas
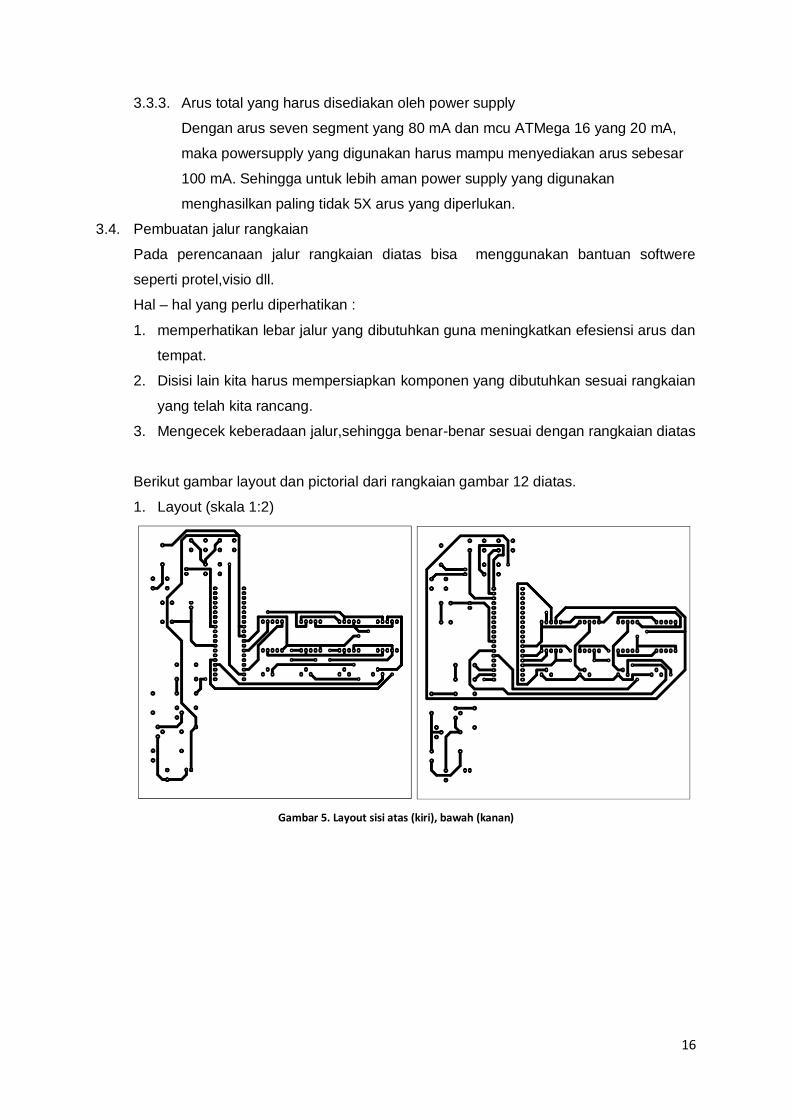
Berikut gambar layout dan pictorial dari rangkaian gambar 12 diatas.
1. Layout (skala 1:2)
Gambar 5. Layout sisi atas (kiri), bawah (kanan)
17
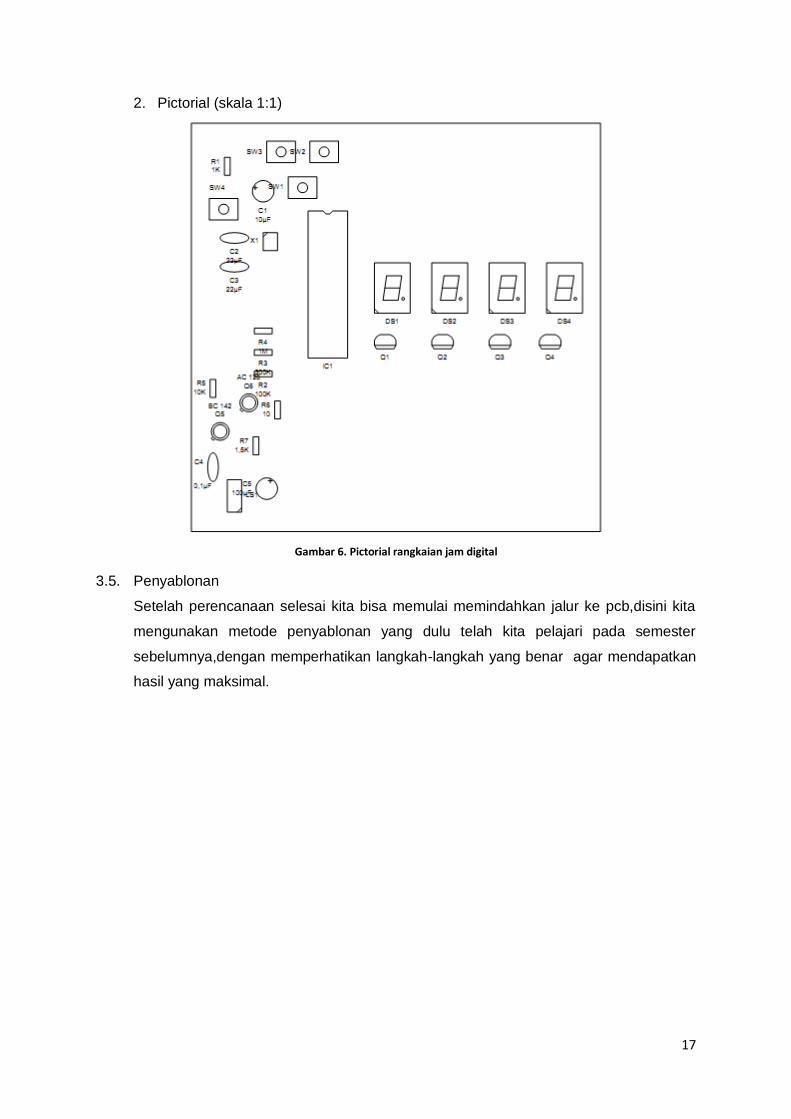
2. Pictorial (skala 1:1)
Gambar 6. Pictorial rangkaian jam digital
3.5. Penyablonan
Setelah perencanaan selesai kita bisa memulai memindahkan jalur ke pcb,disini kita
mengunakan metode penyablonan yang dulu telah kita pelajari pada semester
sebelumnya,dengan memperhatikan langkah-langkah yang benar agar mendapatkan
hasil yang maksimal.
18
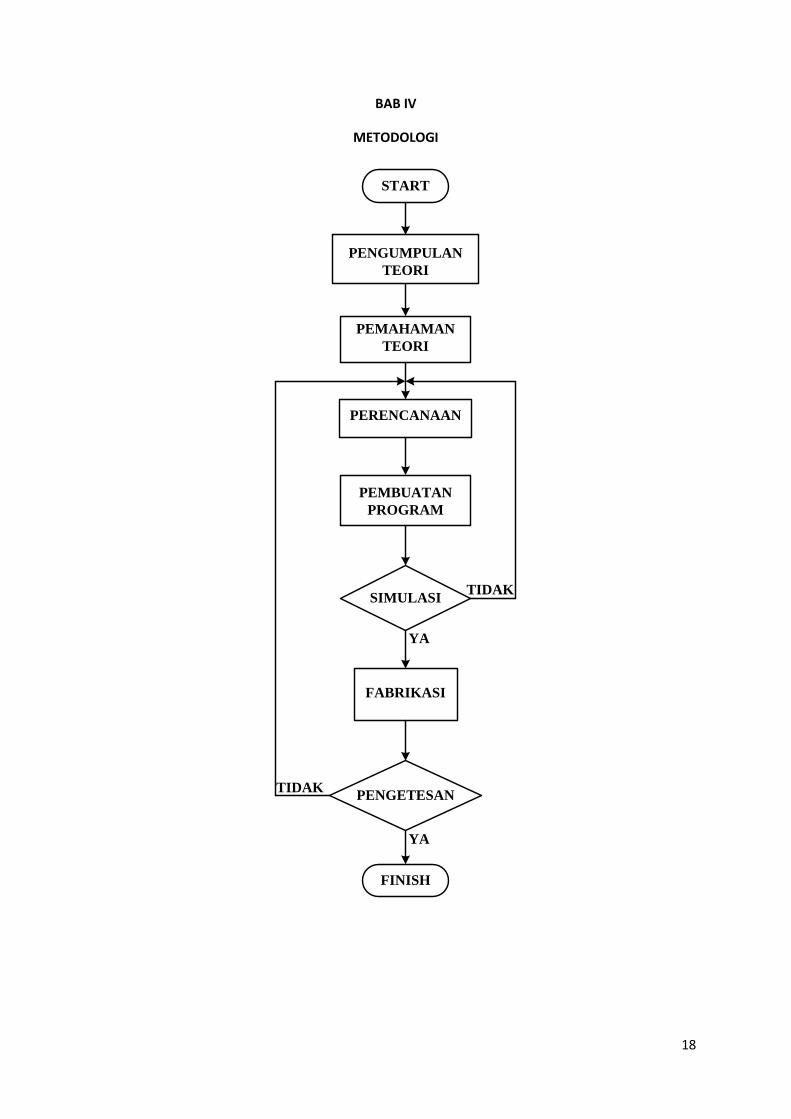
BAB IV
METODOLOGI
START
PENGUMPULAN
TEORI
PEMAHAMAN
TEORI
PERENCANAAN
PEMBUATAN
PROGRAM
SIMULASI
FABRIKASI
PENGETESAN
FINISH
TIDAK
TIDAK
YA
YA
19
Penjelasan Metodologi
4.1. Pengumpulan Teori
Mengumpulkan teori yang berhubungan dengan jam digital mikrokontroler, dan teori
yang berkaitan. Mencari teori yang berhubungan dari internet maupun dari buku yang
sesuai dan relevan.
4.2. Pemahaman Teori
Teori adalah sesuatu yang mendasar yang perlu dipelajari dalam melakukan suatu
kegiatan. Dimana disini, jika akan membuat jam digital mikrokontroler, maka harus
memahami teori sistem dasar jam digital, IC mikrokontroler dan system alarm jam
yang terkait terlebih dahulu. Bagaimana fungsi dari setiap blok serta komponen –
komponen di dalamnya. Terutama parameter yang digunakan untuk mengetahui hasil
yang kita inginkan.
4.3. Perencanaan
Melakukan perencanaan kita lakukan setelah kita memahami teori sistem. Dari teori
yang telah ada kita melakukan perencanaan apa. Mikrokontroler yang digunakan dan
penampil pada jam digital yang disertai alarm. Serta untuk mendapatkan karakteristik
tersebut diperlukan parameter untuk melakukan perhitungan nilai komponen –
komponen yang diperlukan.
4.4. Pembuatan Program
Pembuatan program yang dimaksud adalah pembuatan program yang berada pada IC
mikrokontroler untuk menjalankan jam digital yang ditampilkan pada seven segment
agar pada saat 15 menit, 30 menit, dan 60 menit alarmnya dapat berfungsi dengan
ketentuan yang sesuai yang telah ditentukan.
4.5. Simulasi
Darirencana yang sudah diperhitungkan, kita mencoba mensimulasikan dalam sebuah
software. Software yang digunakan yaitu Codevision dan Proteus. Tujuan dari simulasi
ini adalah untuk meminimalisir rusaknya komponen – komponen karena tidak
sesuainya nilai dari komponen tersebut. Dan dari Codevision dan Proteus kita bisa
mengetahui output dari rangkaian sudah sesuai dengan karakteristik yang diinginkan
atau tidak. Jika tidak maka harus mengulas kembali teori sistem yang ada serta
merencanakan perhitungan nilai komponen – komponennya lagi.
20
4.6. Fabrikasi
Fabrikasi adalah kegiatan aplikasi dari software dan benar – benar akan dipraktekan
untuk sebuah alat agar bisa berfungsi. Dimana jika dalam pembuatan program dan
simulasi sesuai maka kita memulai pembuatan PCB serta merangkai komponen jam
digital mikrokontroler.
Pembuatan jam digital mikrokontroler bisa dimulai dengan merancang program dalam
sebuah software seperti Codevision dan Proteus. Setelah program atmega didalam
software Codevision selesai kita bisa memindah file ke software Proteus untuk
memunculkan simulasi penjalanan program.
Kemudian jika pembuatan pembuatan program selesai dan simulasi sesuai dengan
perencanaan, kita bisa merangkai komponen – komponennya sesuai dengan letak
yang telah ditentukan dalam jalur tersebut. Setelah merangkai harus menyatukan kaki
– kaki komponen dengan jalur PCB dengan cara mensoldernya. Hasil solderan tidar
boleh mempengaruhi jalur PCB dan kaki – kaki komponen lainnya. Karena semua itu
bisa menghambat sistem kerja alat dan dapat mempercepat kerusakan komponen –
komponennya. Bahkan alat tersebut tidak bisa berfungsi atau mati.
4.7. Pengetesan
Setelah proses fabrikasi selesai, selanjutnya ialah proses pengetesan rangkaian
apakah sudah sesuai dengan hasil pada proses simulasi atau tidak.
21
DAFTAR PUSTAKA
1. http://elektro-kontrol.blogspot.com/2011/06/jam-digital-dengan-penampil-seven.html
2. http://elektro-kontrol.blogspot.com/2011/06/program-mengakses-seven-segment.html
3. http://elektro-kontrol.blogspot.com/2011/06/timer-dan-counter-avr.html
4. http://wahyusp.wordpress.com/2009/06/28/proyek-jam-digital-ii-ds1307/
5. http://tips-trik-8.blogspot.com/2009/11/jam-digital-dengan-mikrokontroler_23.html
6. http://wirkamdwyfebrian.blogspot.com/2010/03/bel-pintu.html