22583863 Generar Retardos Para PIC en MPLAB
17
GRUPO ESTUDIANTIL INVENTRONICA J O C P C BC DE C EAD FAE E , , .
-
Upload
ray-apolin -
Category
Documents
-
view
155 -
download
2
Transcript of 22583863 Generar Retardos Para PIC en MPLAB
-
2009
GRUPO ESTUDIANTIL
INVENTRONICA
Joel Oswaldo Campos
Prez
[CURSO BSICO DE PIC RETARDOS POR SOFTWARE] En este segmento se abordara el tema de retardos por software en ensamblador, se aprender
la estructura de un retardo, el uso de subrutinas y trucos que facilitaran la utilizacin de
retardos en cualquier programa.
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 2
Contenido:
1) Retardos por software..3
1.1 Ejemplos..5
1.2 Preguntas y Respuestas.6
2) Bucles anidados..7
2.1 Ejemplos...8
2.2 Ejercicio.9
3) Retardos como subrutinas...10
4) Retardos como supresores de ruido..11
5) Trucos..12
6) Practicas para compilar y probar.13
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 3
A menudo es necesario que nuestros programas usen demoras o retardos, por ejemplo, si
deseamos hacer parpadear un led cada segundo evidentemente necesitaremos usar un
retardo de 1s. Los retardos son prcticamente omnipresentes en nuestros programas. Y hay
dos formas de hacerlos:
-Por software
-Por TMR0
Retardo por Software
Los retardos por Software consisten en que el pic se quede enciclado durante un tiempo. Es
decir, es necesario usar uno o varios contadores que debern ser decrementados, cuando
dichos contadores lleguen a 0 habr concluido el retardo.
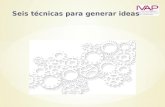
Ejemplo con flujo-grama:
Inicio de retardo
CONTA_1 n
CONTA_1 (CONTA_1 1)
CONTA_1 = 0 ?
FIN
NO
SI
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 4
Observe en el diagrama anterior como a una variable CONTA_1 se le asigna un numero n,
posteriormente esta variable se decrementa y se pregunta si ha llegado a 0, si no ha llegado a
0 entonces se vuelve a decrementar, y asi sucesivamente hasta que llegue a 0 en cuyo caso es
el FIN del retardo. El programa se quedo perdiendo el tiempo encilado dando vueltas n
veces.
Veamos la traduccin a ensamblador, para esto consideremos que n=100.
Inicio_retardo ;etiqueta para dar nombre al retardo
movlw d100 ; W 100
movwf CONTA_1 ; CONTA_1 W
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.1 ;NO ha llegado a 0, entonces vuelve a decrementar
------ -------- ;SI llego a 0 entonces FIN del retardo,sigue el programa
Observe que tenemos una instruccin nueva decfsz, esta instruccin es equivalente a decir:
Decrementa el registro f y salta si ha llegado a 0
Es una instruccin muy til y sumamente utilizada principalmente en procesos que se repiten n
numero de veces, tales como lo son los retardos.
Muy bien, en este punto entendemos el concepto de un retardo por software, sin embargo
surge una duda obvia e importante: Cmo calculo el tiempo que durar un retardo?
Muy bien, observemos esta parte del cdigo ensamblador:
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.1 ;NO ha llegado a 0, entonces vuelve a decrementar
Ntese que esta parte es la que se ejecuta n veces hasta que CONTA_1 llega a 0, asi que solo
debemos saber cunto tardan en ejecutarse estas dos instrucciones, luego lo multiplicamos
por n y el resultado es el tiempo que dura el retardo. La instruccin decfsz dura 1us y la
instruccin goto dura 2us, asi que entre ambas duran 3uS, asi pues el retardo durar:
Retardo = 3uS x n si n= 100 entonces Retardo = 300uS
Nota: La parte del cdigo que se ejecuta repetitivamente hasta que CONTA_1 llega a 0 se llama
BUCLE.
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 5
EJEMPLO:
Deseamos hacer un retardo de 100uS, entonces usamos el mismo cdigo:
Inicio_retardo ;etiqueta para dar nombre al retardo
movlw dn ; W n
movwf CONTA_1 ; CONTA_1 W
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.1 ;NO ha llegado a 0, entonces vuelve a decrementar
------ -------- ;SI llego a 0 entonces FIN del retardo,sigue el programa
Solo que ahora no sabemos cunto valdr n. Para calcular n usamos la formula anterior:
Retardo = n x 3uS
Despejamos n y tenemos:
n = Retardo / 3uS n = 100uS / 3uS = 33.333
Entonces sabemos que debemos cargar a la variable CONTA_1 con el numero 33 para lograr un
retardo aproximado a 100uS: Retardo = n x 3us = 33 x 3us = 99uS.
EJEMPLO 2:
Deseamos hacer un retardo de 100uS, para esto ahora hacemos un pequeo cambio al cdigo
en ensamblador del retardo:
Inicio_retardo ;etiqueta para dar nombre al retardo
movlw d100 ; W 100
movwf CONTA_1 ; CONTA_1 W
nop
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.2 ;NO ha llegado a 0, entonces salta 2 instrucciones atras
------ -------- ;SI llego a 0 entonces FIN del retardo,sigue el programa
Observe que ahora tenemos una instruccin nueva: nop, esta instruccin dura 1uS y la
operacin que realiza es nula, es decir, no hace nada, entonces para que la usamos? Observe
esta parte del cdigo:
nop
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.2 ;NO ha llegado a 0, entonces salta 2 instrucciones atras
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 6
Note que esta parte del cdigo es la que se repite n veces hasta que CONTA_1 llegue a 0
(bucle). El bucle ahora tiene 3 instrucciones: nop (1uS), decfsz (1uS) y goto (2uS), que entre las
tres suman 4uS, entonces la frmula para nuestro retardo cambio:
Retardo = 4uS x n
Despejamos n y tenemos:
n = Retardo / 4uS n = 100uS / 4uS = 25
Vemos como usando la instruccin nop el numero que cargamos a CONTA_1 es ms exacto y
menor. Se puede ver la utilidad de esta instruccin que aparentemente era ociosa.
PREGUNTAS:
1) Realice un retardo que dure 1mS
2) Cuanto es el Tiempo mximo que se genera sin la instruccin nop y cuanto con la
instruccin nop de los ejemplos anteriores?
3) Es posible generar un retardo mayor agregando mas instrucciones nop?
-----------------------------------------------------------------------------------------------------------------------------
Respuestas
1)
Inicio_retardo ;etiqueta para dar nombre al retardo
movlw d250 ; W 250
movwf CONTA_1 ; CONTA_1 W
nop
decfsz CONTA_1,F ; CONTA_1 CONTA_1 -1 y salta si ya llego a 0
goto $-.2 ;NO ha llegado a 0, entonces salta 2 instrucciones atras
------ -------- ;SI llego a 0 entonces FIN del retardo,sigue el programa
n = Retardo / 4 uS n = 1000uS / 4uS = 250
2)
Sin el nop = 765uS, con el nop = 1025uS.
3)
Si es posible generar retardos ms grandes de esa manera paro hay mtodos ms efectivos
para hacer retardos prolongados.
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 7
Bucles anidados
Como hemos visto el retardo mximo que se puede generar de las formas enunciadas
anteriormente son apenas mayores a 1mS. Para generar retardos mucho mayores necesitamos
usar BUCLES ANIDADOS. Estos bucles anidados consiten generar un Retardo base que se
repetir n veces, el retardo base se hace de la manera anteriormente mencionada usando un
bucle que llamamos bucle interno, y al repetir este retardo base n veces estamos formando un
bucle mayor o bucle externo. Veamos el ejemplo en flujo-grama:
Inicio de retardo
CONTA_2 m
CONTA_2 (CONTA_2 1)
CONTA_2 = 0 ?
FIN
NO
SI
CONTA_1 n
CONTA_1CONTA_1-1
CONTA_1=0?
NO
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 8
Observe como primero se carga a la variable CONTA_2 con m, luego CONTA_1 se carga con n,
luego se decrementa CONTA_1 hasta que llegue a 0 en cuyo caso decrementa CONTA_2, si
CONTA_2 no es 0 entonces vuelve a cargar CONTA_1 con n y se vuelve a repetir el ciclo de
decrementar CONTA_1 hasta 0, el ciclo se repite m veces hasta que CONTA_2 llegue a 0 en
cuyo caso ser el fin del retardo.
Recuerde que la frmula para el retardo simple de un solo bucle usando la instruccin nop era:
Retardo = n x 4uS
Utilizando dos bucles anidados la frmula del retardo sera la siguiente:
Retardo = m x (n x 4uS)
Muy simple verdad. Veamos como se traduce a ensamblador:
Inicio_retardo
movlw dm ; W m
movwf CONTA_2 ; CONTA_2 W
movlw dn ; W n
movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
------ -------- ;Si es 0, entonces fin del retardo
EJEMPLO:
Realizar un retardo de 10mS. Recuerde que para un retardo de 1 mS usbamos un retardo
simple de un bucle y la variable CONTA_1 le asignbamos 250:
Retardo interno= 4uS x 250 = 1000uS = 1mS
Usaremos este retardo como reatrdo base y lo repetiremos 10 veces para hacer un retardo
final de 10ms:
Retardo = m x (4uS * 250) = 10 x (1mS) = 10mS
Es decir, m = 10 y n = 250, con eso logramos el retardo de 10mS
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 9
Retardo de 10mS en ensamblador:
Inicio_retardo
movlw d10 ; W m
movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n
movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
------ -------- ;Si es 0, entonces fin del retardo y sigue con el programa
EJERCICIO:
Genere el cdigo para hacer un retardo de 1 segundo.
Solucin:
1 segundo = 1000 mS, notamos de inmediato que ser necesario un tercer bucle ya que el
numero 1000 no podr ser cargado al CONTA_2 ya que supera el mximo de 255. Asi que
nuestra formula con un tercer bucle seria as:
Retardo = p x ( m x (n x 4uS) )
O bien: Retardo = CONTA_3 x ( CONTA_2 x (CONTA_1 x 4uS) )
Inicio_retardo
movlw d10 ; W m movwf CONTA_2 ; CONTA_3 W
movlw d100 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-6 ;No es 0, entonces regresa a cargar conta_1
decfsz CONTA_3,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-10 ;No es 0, entonces regresa a cargar conta_1
------ -------- ;Si es 0, entonces fin del retardo y sigue con el programa
Retardo = 10 x (100 x (1mS)) = 1000mS = 1 segundo
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 10
Note la facilidad para hacer retardos, Es muy conveniente usar retardos base redondos con
base en 10 es decir, que el retardo base sea de 1mS o 10mS etc para que solo se repita n veces
para calcular y obtener los retardos que deseemos fcilmente y no tener que calcular tanto.
Retardos como subrutinas
Supongamos que deseamos hacer un programa para un led parpadeante, que encienda y
apague cada 1 segundo. El cdigo en ensamblador seria asi:
Inicio_principal
bsf LED ;encendemos el LED
call Retardo_1s ;Llamamos a la subrutina Retardo_1s
bcf LED ;apagamos el LED
call Reatrdo_1s ;llamamos a la subrutina Retardo_1s
goto Inicio_principal ;Repetimos el ciclo
Retardo_1s ;Subrutina Retardo_1s
movlw d10 ; W m movwf CONTA_2 ; CONTA_3 W
movlw d100 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
decfsz CONTA_3,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.10 ;No es 0, entonces regresa a cargar conta_1
return ;Si es 0, entonces fin del retardo y regresa
Las subrutinas son segmentos de cdigo que se pueden ejecutar cada vez que el programa
principal las llame y cuando terminen de ejecutarse regresan a la siguiente posicin de donde
fueron llamadas. La instruccin que las manda a llamar es CALL y la instruccin que regresa a
la siguiente posicin de donde fueron llamadas es RETURN. Las subrutinas deben tener un
nombre para poder ser llamadas. Son una herramienta muy til que ahorra espacio de
memoria y facilita la programacin.
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 11
Retardos como supresores de rebote
Sabemos que los elementos mecnicos como los pulsadores producen un efecto llamado
rebote. Cuando se presiona un botn este no se cierra idealmente, sino que antes de cerrarse
completamente rebota produciendo varios pulsos antes de cerrarse completamente. El
efecto de rebote suele durar menos de 20 ms. Los pulsos falsos debido al rebote suelen ser un
problema si se desea hacer un contador, ya que cuando se pulsa el botn para incrementar el
contador el contador no se incrementa en 1, sino en varias unidades, Por qu? Pues porque
cuenta los pulsos falsos producidos por el rebote.
Los retardos son tiles supresores de rebote. Cuando se pulsa un botn se llama a un retardo
de aproximadamente 20ms, despus del retardo de 20ms continua el programa, de esta
manera los pulsos de rebote no desaparecen pero son completamente omitidos.
EJEMPLO:
Explorar_boton
BTFSS PUSH ;exploramos el boton
GOTO explorar_boton ;no se presiono, entonces sigue explorarndo
CALL Retardo_20ms ;si se pulso, entonces demora de 20ms
INCF CONTADOR,F ;incrementa la variable CONTADOR
MOVF CONTADOR,W ;enviamos CONTADOR a PORTB para ver cuenta
MOVWF PORTB
GOTO explorar_contador ;repetir el ciclo
Retardo_20ms
movlw d20 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
return ;Si es 0, entonces fin del retardo y sigue con el programa
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 12
TRUCOS
Existe un truco muy util llamado multiplicacin de retardos base. Este truco consiste en usar
uno o unos pocos retardos base y solo invocarlos y multiplicarlos por X para tener tantos
retardos como queramos. Asi se puede hacer un retardo base de 1ms y generar cuando
queramos retardos desde 1ms hasta 255ms sin necesidad de hacer 255 retardos diferentes. La
formula que usaramos seria la siguiente:
Retardo = W X Retardo_base
Por ejemplo, si se desea un retardo de 10 ms solo se hara lo siguiente:
movlw d10
call Retardo_x1ms
-----------------------------------------------------------------------------------------------------------------------------
Ejemplo:
.
.
movlw d10 ;W10
call Retardo_x1ms ;Asi tendriamos un retardo de 10 x 1mS = 10mS
.
.
Retardo_x1ms ; subrutina Retardo x 1 ms movwf CONTA_2 ; CONTA_2 10
movlw d250 ; W 250 movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0 goto $-.6
return
Lo que hace lo anterior es primero mover a W el 10, luego llama al reatardo, en donde a
CONTA_2 se le asigna lo que tiene W, como el retardo base es de 1ms entonces el retardo
total es W x 1ms.
-----------------------------------------------------------------------------------------------------------------------------
Podemos hacer 5 retardos base de 1ms de 10ms de 100ms de 1seg y de 10seg y asi hacer
combinaciones para poder hacer todos los retardos posibles desde 1ms hasta 2550 segundos.
Por ejemplo, si deseamos un retardo de 362ms entonces escribiramos lo siguiente:
movlw d3
call Retardo_x100ms ;Retardo de 3 x 100ms = 300ms
movlw d62
call Retardo_x1ms ;Retardo de 62 x 1ms = 62ms
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 13
PRACTICAS DE EJEMPLO PARA COMPILAR Y PROBAR:
LED PARPADEANTE: Enciende y apaga un led conectado a RB0 con una duracin de 1
segundo.
list p=16f877a ; list directive to define processor
#include ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_OFF & _BODEN_OFF & _PWRTE_OFF & _XT_OSC & _WRT_OFF & _LVP_OFF &
_CPD_OFF
CBLOCK 0X20 ;definimos las variables que usaremos
CONTA_1
CONTA_2
CONTA_3
ENDC
#define LED PORTB,0 ;definimos PORTB,0 con el nombre LED para facilitar el programa
ORG 0
Goto inicio
ORG 5
Inicio
Bsf STATUS,RP0 ;Vamos al banco 1 para configurar puertos
Bcf STATUS,RP1
Movlw d7 ;Asignamos 7 a ADCON1, es decir, todas digitales
Movwf ADCON1
Clrf TRISB ;Limpiamos TRISB, es decir, PORTB todo como salidas
Bcf STATUS,RP0 ;Regresamos al banco 0 de trabajo.
Inicio_principal
Bsf LED ;encendemos led
Call Retardo_1s ;esperamos 1 segundo
BCF LED ;apagamos led
Call Retardo_1s ;esperamos 1 segundo
Goto Inicio_prinicpal ;repetimos el ciclo
Retardo_1s
movlw d10 ; W m movwf CONTA_2 ; CONTA_3 W
movlw d100 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
decfsz CONTA_3,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.10 ;No es 0, entonces regresa a cargar conta_1
return ;Si es 0, entonces fin del retardo y regresa
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 14
LED PARPADEANTE 2: Enciende un led el 20% del tiempo, el led conectado a RB0. Periodo de
1 segundo, frecuencia de 1Hz. Usando el truco de multiplicacin de retardo base.
list p=16f877a ; list directive to define processor
#include ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_OFF & _BODEN_OFF & _PWRTE_OFF & _XT_OSC & _WRT_OFF & _LVP_OFF &
_CPD_OFF
CBLOCK 0X20 ;definimos las variables que usaremos
CONTA_1
CONTA_2
CONTA_3
ENDC
#define LED PORTB,0 ;definimos PORTB,0 con el nombre LED para facilitar el programa
ORG 0
Goto inicio
ORG 5
Inicio
Bsf STATUS,RP0 ;Vamos al banco 1 para configurar puertos
Bcf STATUS,RP1
Movlw d7 ;Asignamos 7 a ADCON1, es decir, todas digitales
Movwf ADCON1
Clrf TRISB ;Limpiamos TRISB, es decir, PORTB todo como salidas
Bcf STATUS,RP0 ;Regresamos al banco 0 de trabajo.
Inicio_principal
Bsf LED ;encendemos led
Movlw d2
Call Retardo_x100ms ;esperamos 200ms
BCF LED ;apagamos led
Movlw d8
Call Retardo_x100ms ;esperamos 800 ms
Goto Inicio_prinicpal ;repetimos el ciclo
Retardo_x100ms
movwf CONTA_2 ; CONTA_3 W
movlw d100 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
decfsz CONTA_3,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.10 ;No es 0, entonces regresa a cargar conta_1
return ;Si es 0, entonces fin del retardo y regresa
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 15
CONTADOR: Incrementa un contador binario que se visualiza en PORTB presionando un botn conectado a RA0. list p=16f877a ; list directive to define processor
#include ; processor specific variable definitions
__CONFIG _CP_OFF & _WDT_OFF & _BODEN_OFF & _PWRTE_OFF & _XT_OSC & _WRT_OFF & _LVP_OFF &
_CPD_OFF
CBLOCK 0X20 ;definimos las variables que usaremos
CONTA_1
CONTA_2
ENDC
#define PUSH PORTA,0 ;definimos PORTA,0 con el nombre PUSH para facilitar el programa
ORG 0
Goto inicio
ORG 5
Inicio
Bsf STATUS,RP0 ;Vamos al banco 1 para configurar puertos
Bcf STATUS,RP1
Movlw d7 ;Asignamos 7 a ADCON1, es decir, todas digitales
Movwf ADCON1
Clrf TRISB ;Limpiamos TRISB, es decir, PORTB todo como salidas
Bcf STATUS,RP0 ;Regresamos al banco 0 de trabajo.
explorar_boton
BTFSS PUSH ;exploramos el boton
GOTO explorar_boton ;no se presiono, entonces sigue explorarndo
CALL Retardo_20ms ;si se pulso, entonces demora de 20ms
INCF CONTADOR,F ;incrementa la variable CONTADOR
MOVF CONTADOR,W ;enviamos CONTADOR a PORTB para ver cuenta
MOVWF PORTB
GOTO explorar_boton ;repetir el ciclo
Retardo_20ms
movlw d20 ; W m movwf CONTA_2 ; CONTA_2 W
movlw d250 ; W n movwf CONTA_1 ;CONTA_1W
nop ;no opera
decfsz CONTA_1,F ;CONTA_1CONTA_1-1 y salta si llego a 0
goto $-.2 ;NO es 0, entonces salta al nop
decfsz CONTA_2,F ;SI es 0, entonces CONTA_2CONTA_2 -1 y salta si llega a 0
goto $-.6 ;No es 0, entonces regresa a cargar conta_1
return ;Si es 0, entonces fin del retardo y regresa
-
Curso bsico de PIC Retardos por software
Curso bsico de microcontroladores [email protected] Pgina 16
GRUPO ESTUDIANTIL
INVENTRONICA
Aclaracin de dudas respecto al tema
tratado en este trabajo al correo:
![Antologia Un Pic de Neant [1970]](https://static.fdokumen.com/doc/165x107/577cda3a1a28ab9e78a51f20/antologia-un-pic-de-neant-1970.jpg)