
182 DT pbl - sttmandalabdg.ac.idsttmandalabdg.ac.id/wp-content/uploads/2019/11/ELS... · R dari...
52
DIKTAT KULIAH PENGUKURAN BESARAN LISTRIK Oleh DWIYANTO PROGRAM STUDI TEKNIK ELEKTRO SEKOLAH TINGGI TEKNOLOGI MANDALA BANDUNG 2019
Transcript of 182 DT pbl - sttmandalabdg.ac.idsttmandalabdg.ac.id/wp-content/uploads/2019/11/ELS... · R dari...

DIKTAT KULIAH
PENGUKURAN BESARAN LISTRIK
Oleh
DWIYANTO
PROGRAM STUDI TEKNIK ELEKTRO
SEKOLAH TINGGI TEKNOLOGI MANDALA BANDUNG
2019

i
KATA PENGANTAR
Buku diktat PENGUKURAN BESARAN LISTRIK ini merupakan dasar-dasar untuk
memahami teknik-teknik pengukuran dalam Teknik Tenaga Listrik yang pada saat ini makin
berkembang pesat, namun juga disini disertakan pengetahuan mengenai Alat-alat Ukur. Buku diktat ini
dapat merupakan sumber belajar yang dapat dimanfaatkan dalam membantu pelaksanaan kegiatan
perkuliahan dan dapat menarik minat para pembaca.
Dalam kesempatan ini, penulis mengucapkan banyak terima kasih kepada penyelenggara STT
Mandala terutama kepada lembaga STT Mandala Bandung yang telah mendorong terciptanya proses
belajar-mengajar dengan baik.
Selama pengerjaan buku diktat ini, banyak rekan yang memberikan saran-saran yang sangat
berguna. Akan tetapi mungkin masih saja dirasakan belum dapat memenuhi harapan semua pihak, dalam
hal materi dan cara penyampaiannya. Diharapkan dengan adanya tanggapan-tanggapan dalam diskusi
juga usulan dari semua pihak yang terkait, tulisan dapat diperbaiki. Untuk itu penulis ucapkan terima
kasih yang sebesar-besarnya.
Bandung, April 2019
Penulis
ii
DAFTAR ISI
KATA PENGANTAR.....................................................................................................................................................i
DAFTAR ISI ...................................................................................................................................................................ii
BAB I. KESALAHAN ALAT UKUR DAN PENGUKURAN .................................................................................1
1.1 PENDAHULUAN...............................................................................................................................................1
1.2 Kesalahan alat ukur..............................................................................................................................................1
1.3 Batas kesalahan alat ukur ....................................................................................................................................2
1.4 Sebab sebab kesalahan alat ukur.........................................................................................................................3
1.5 Alat ukur dirancang sesuai dengan posisi ..........................................................................................................3
1.6 TANDA TANDA ALAT UKUR.......................................................................................................................3
1.7 Kesalahan Pengukuran ........................................................................................................................................4
1.8 Kesalahan tidak sengaja.......................................................................................................................................5
1.9 Kesalahan Propagasi............................................................................................................................................5
BAB II. AMPERMETER, VOLTMETER DAN OHMMETER ...............................................................................9
2.1 Pendahuluan .........................................................................................................................................................9
2.2 Jenis alat ukur.....................................................................................................................................................10
2.3 Alat ukur kumparan putar..................................................................................................................................11
2.4 Tingkah laku dinamika:.....................................................................................................................................12
2.5 Torsi kontrol .......................................................................................................................................................14
2.5.1 Torsi redam dan Torsi inersia. ..................................................................................................................18
2.6 Alat ukur besi putar............................................................................................................................................24
BAB III. PENGUKURAN DAYA..............................................................................................................................26
3.1 Daya Rangkaian Searah.....................................................................................................................................26
3.2 Daya rangkaian arus bolak balik.......................................................................................................................27
3.3 Pengukuran daya dengan Wattmeter ................................................................................................................29
3.4 Pengukuran daya 3 phasa. .................................................................................................................................34
Pengukuran daya dengan 3 wattmeter 1 phasa .................................................................................................34
3.4.2 Pengukuran daya 3, 4 kawat dengan 3 wattmeter 1 phasa ...................................................................35
3.4.3 Pengukuran dengan 2 wattmeter 1 phasa.................................................................................................36
3.5 Pengaruh cos terhadap pengukuran................................................................................................................37
3.6 Pengukuran daya semu (VAR) .........................................................................................................................40
1
BAB I. KESALAHAN ALAT UKUR DAN PENGUKURAN
1.1 PENDAHULUAN
Sebelum mengetahui lebih lanjut, perlu dipelajari ilmu-ilmu yang harus diketahui lebih dahulu, agar
dalam menganalisa akan menghasilkan yang lebih baik. Ilmu dasar yang perlu dipelajari tersebut antara
lain:
1. Ilmu Fisika
2. Ilmu Matematika
Ilmu fisika yang harus dipelajari adalah:
Sistim satuan; karena dengan dipahami sistim satuan khususnya sistim satuan internasional (S.I.)
akan mempermudah perhitungan-perhitungan fisis yang terjadi pada alat ukur tersebut.
Fisika Listrik, yaitu yang mempelajari sifat-sifat komponen listrik, antara lain, tahanan, induktansi,
kapasitansi transistor dan lain-lain, serta hukum-hukum yang menyangkut hubungan antara komponen-
komponen tersebut dengan besaran-besaran listrik seperti arus tegangan daya, medan listrik, medan magnit
dll. Dengan diketahuinya hukum-hukum tersebut akan mempermudah untuk menganalisa alat ukur.
Fisika non listrik, seperti koefisien temperatur suatu bahan, konstanta pegas, keseimbangan gaya,
momen, inersia (kelembaman), energi dll.
Bidang matematik yang perlu dipelajari antara lain:
Analisa Vektor, mengingat hampir semua penyelesaian listrik, khususnya arus bolak-balik, banyak
memakai analisa vektor.
Diferensial, integral, ilmu ini digunakan untuk penyelesaian medal listrik dan medan magnit yang
ikut berinteraksi dalam alat ukur.
1.2 Kesalahan alat ukur
Ketepatan dan ketelitian suatu alat sangat tergantung pada perancangan, bahan dan kemampuan
orang yang membuat alat ukur tersebut. Masalah yang paling diutamakan pada alat ukur adalah ketepatan,
makin tinggi nilai ketepatan suatu alat makin baik alat tersebut. Akan tetapi makin tepat suatu alat makin
mahal harga pembuatannya. Hal ini karena diperlukan suatu perancangan, bahan dan kemampuan pembuat
yang tinggi. Sehingga bila dinilai harganya sangat mahal dan tidak ekonomis. Oleh karena itu pabrik
2
pembuat memberikan suatu garansi terhadap nilai ketepatan suatu alat. Pada alat ukur defleksi garansi
ketepatan ini dinyatakan dalam skala penuhnya.
Perbedaan harga benar dengan harga hasil pengukuran dinyatakan sebagai kesalahan. Sebenarnya
dalam suatu pengukuran nilai kesalahan tidak sangat berarti, karena belum menyatakan tingkat
keberhasilan suatu pengukuran. Harga yang paling penting adalah perbandingan nilai kesalahan tersebut
terhadap nilai sebenarnya. Sebagai contoh suatu pengukuran tahanan terjadi kesalahan terjadi kesalahan
sebesar 2 Ohm, harga tersebut tidak sangat berarti bilai tahanan yang diukur 1 Kohm, dan berarti bila
tahanan yang diukur 10 Ohm. Perbandingan antara kesalahan dengan harga yang sebenarnya disebut
kesalahan relatif.
Kesalahan (=error) = A1 pengukuran – A sebenarnya
Kesalahan relatifA
E
Koreksi C = T - M
1.3 Batas kesalahan alat ukur
Batas kesalahan Alat Ukur yang dimaksudkan disini adalah kesalahan maksimum pada defleksi
penuh yang besar kesalahannya tidak lebih dari klasnya (dalam persen). Klas alat ukur adalah jaminan dari
pabrik pembuat alat ukur. Klas ini menyatakan tingkat ketelitian dari alat ukur tersebut. Makin kecil angka
klasnya, makin teliti alat tersebut. Ada 8 klas menurut ketelitiannya. Pembagian klas tersebut adalah 0,05;
0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 5. Klas-klas ini diklasifikasikan ke dalam 3 golongan:
Alat-alat ukur dari klas 0,05; 0,1 dan 0,2 yang tergolong kedalam alat ukur yang mempunyai ketelitian
tinggi, dan baik untuk penelitian di Laboratorium. Selain dari pada itu alat-alat ukur ini dapat pula untuk
kalibrasi alat-alat ukur dari klas yang lebih rendah tingkatnya.
Alat-alat ukur dari klas 0,5 dan 1,0 yang tergolong kedalam alat ukur portabel dan baik untuk praktikum
di Laboratorium yang tidak memerlukan ketelitian tinggi.
Alat-alat ukur dari klas 1,5; 2,5 dan 5 yang tergolong kedalam alat ukur untuk panel-panel ukur yang
dapat dilihat dari kejauhan tanpa ketelitian yang tinggi.
3
1.4 Sebab sebab kesalahan alat ukur
Alat ukur telah dirancang sesuai dengan kelas yang diinginkan, oleh karena itu dalam pengukuran
diperhatikan hal-hal yang memoengaruhi kesalahan alat ukur, yaitu:
Medan magnit luar
Temperatur lingkungan
Pemanasan sendiri
Pergeseran titik nol
Gesekan-gesekan
Umur
Posisi alat ukur.
1.5 Alat ukur dirancang sesuai dengan posisi
Khusus alat ukur elektro magnetis selalu terdapat beberapa tanda padanya yang menyatakan:
Jenis alat ukur
Jenis besaran yang dapat diukur
Letak alat ukur saat pengukuran
tegak, datar, 60 miring dengan 60o.
Klas
Tegangan testing.
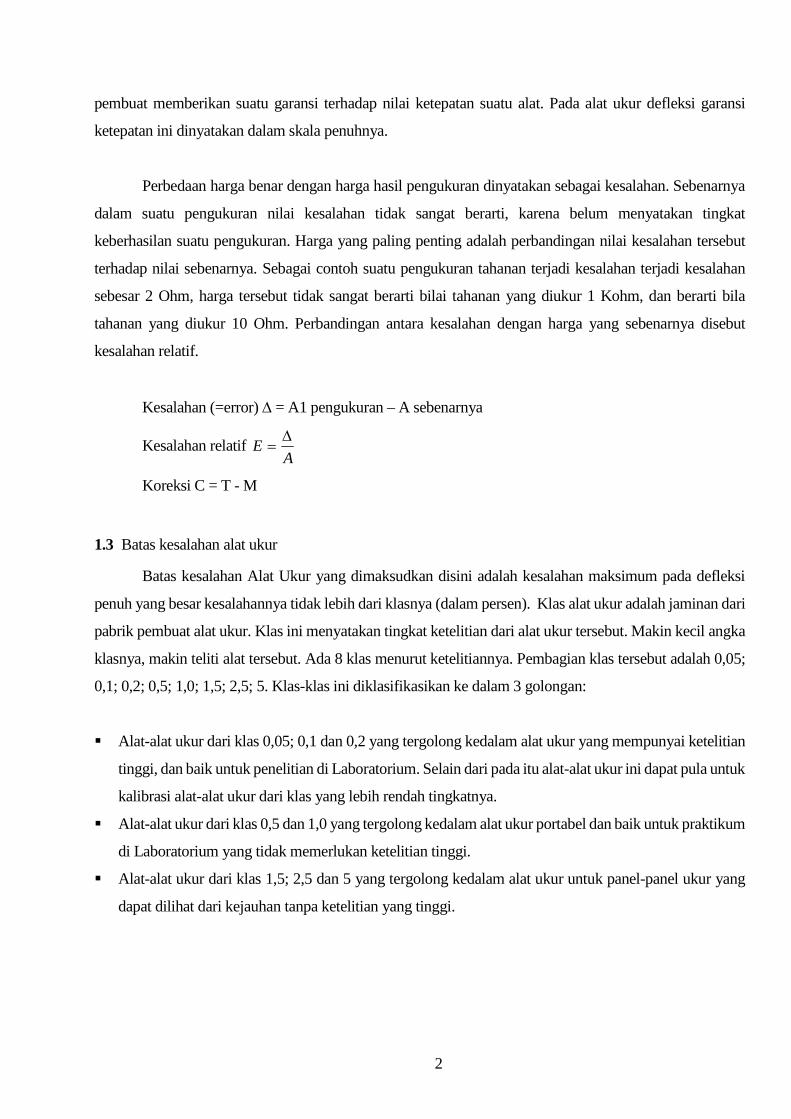
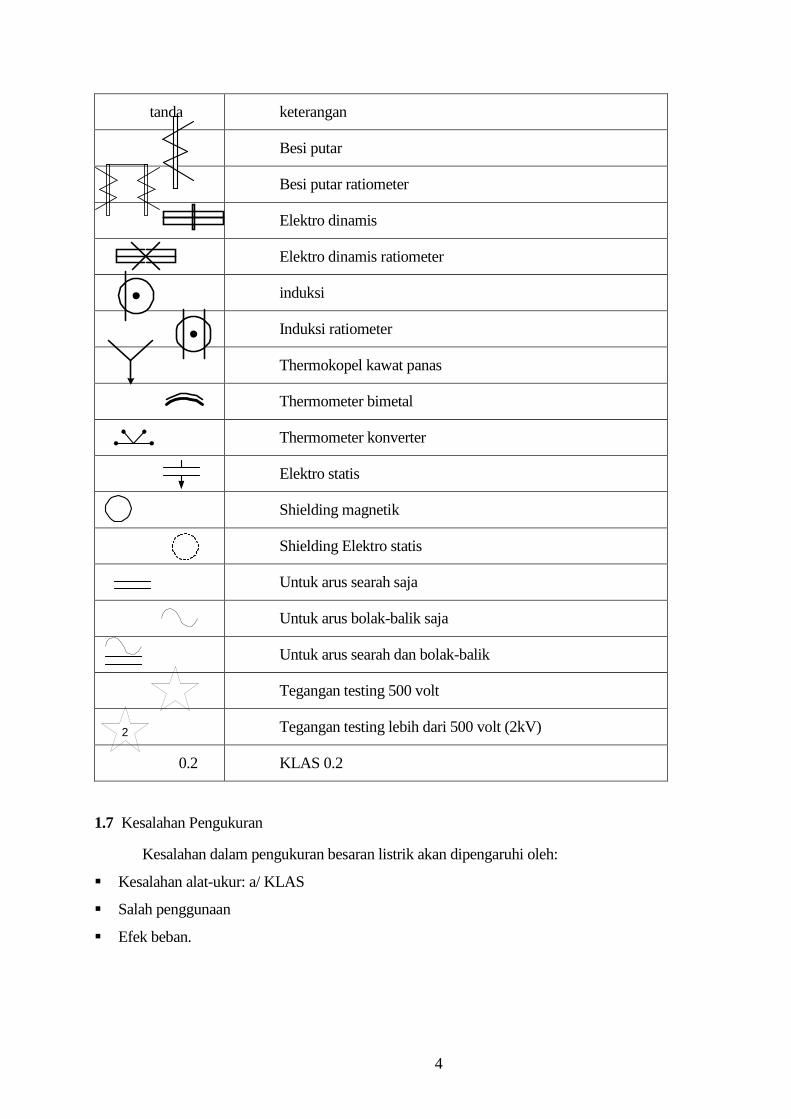
1.6 TANDA TANDA ALAT UKUR
tanda keterangan
Kumparan putar dg magnit permanent
Kumparan putar dg penyearah
Kumparan putar ratiomater
Magnit gerak
Magnit gerak ratiomater
4
tanda keterangan
Besi putar
Besi putar ratiometer
Elektro dinamis
Elektro dinamis ratiometer
induksi
Induksi ratiometer
Thermokopel kawat panas
Thermometer bimetal
Thermometer konverter
Elektro statis
Shielding magnetik
Shielding Elektro statis
Untuk arus searah saja
Untuk arus bolak-balik saja
Untuk arus searah dan bolak-balik
Tegangan testing 500 volt
Tegangan testing lebih dari 500 volt (2kV)
0.2 KLAS 0.2
1.7 Kesalahan Pengukuran
Kesalahan dalam pengukuran besaran listrik akan dipengaruhi oleh:
Kesalahan alat-ukur: a/ KLAS
Salah penggunaan
Efek beban.
2

5
1.8 Kesalahan tidak sengaja
Semua kesalahan yang tidak diketahui penyebabnya dimasukan kedalam kesalahan random.
Suatu perancangan pengukuran yang baik dapat mengurangi kesalahan ini, tetapi juga perlu ditunjang
mengenai ketepatan kerja, dan bekerja dibawah batas-batas yang diperbolehkan. Untuk mengaasi
semacam ini dapat dilakukan dengan memperbanyak jumlah pengukuran, sehingga dapat dilakukan
pendekatan statistik yang mendapatkan hasil pengukuran.
1.9 Kesalahan Propagasi
Kesalahan tidak langsung dari besaran-besaran lain yang diukur. Misal mencari/ mengukur tahanan
R dari mengukur tegangan V dan arus I.
Contoh-1:
Resistansi R ditentukan lewat pengukuran tegangan & arus dengan alat ukur klas 0.5. Batas ukur
(skala) voltmeter dan ampermeter yang digunakan 60 volt dan 6 amper, sedangkan masing-masing
menunjukkan pembacaan 40 volt dan 5 Amper. Hitung resistansi dan % kesalahan R .
Kesalahan tegangan voltmeter 5.160100
5.2
100 skala
KLASV volt
Kesalahan arus ampermeter 15.06100
5.2
100 skala
KLASI amper
Besarnya resistansi ohmI
VR 8
5
40
Kesalahan pengukuran R :
II
RV
V
RR
IVIVI
R 21
15.05405.15
1 2 R
ohmR 06.024.03.0
Kesalahan pengukuran dalam prosentase R (%):
%75.0%1008
06.0%100%
R
RR
Contoh-2:
Faktor daya beban ditentukan lewat pengukuran daya P, tegangan V dan arus I, dengan hasil sebagai
berikut:
P = 400 10 watt

6
V = 380 5 volt
I = 1.5 0.01 amper
Hitung faktor daya pf dan % kesalahan.
Jawab:
702.05.1380
400
IV
Ppf
Kesalahan faktor daya pf:
IVI
PV
IV
PP
VIpfI
I
pfV
V
pfP
P
pfpf
22
1
004.001.05.1380
55.1380
40010
5.1380
122
P
pf
%6.0%100702.0
004.0%100%
pf
pfpf
contoh-3: Suatu Voltmeter 100 volt; klas 0,2. Berapa prosentase kesalahan pada pengukuran
tegangan masing-masing 100 volt, 50 volt dan 25 volt.
Jawab:
Suatu Voltmeter 100 volt berarti alat ukur ini mempunyai kemampuan mengukur tegangan
sampai 100 volt atau dengan lain perkataan batas ukur (BU) = 100 volt. Maka ketelitian dari alat ukur
tersebut atau skala terkecil yang dapat dibaca atau pula kesalahan
Pada pengukuran 100 volt, maka harga yang sebenarnya adalah 100
Kesalahan tegangan V alat ukur voltmeter adalah
MaksimumSKALAKLAS
V 100
KLAS = 0.2
Skala (volt) = 100
V (volt) = 0.2
%2.0%100100
2.0%100(%)
V
VV
Pada pengukuran 50 volt, maka harga yang sebenarnya adalah 50 (V=50 volt)
Kesalahan tegangan V alat ukur voltmeter adalah
MaksimumSKALAKLAS
V 100
2.0100100
2.0V volt

7
Prosentase kesalahan tegangan V(%) alat ukur voltmeter adalah
%4.0%10050
2.0%100(%)
V
VV
Pada pengukuran 25 volt, maka harga yang sebenarnya adalah 25 (V=25 volt)
Kesalahan tegangan V alat ukur voltmeter adalah
MaksimumSKALAKLAS
V 100
2.0100100
2.0V volt
Prosentase kesalahan tegangan V (%) alat ukur voltmeter adalah
%8.0%10025
2.0%100(%)
V
VV
Contoh-4: Suatu alat ukur voltmeter elektro mekanis dinyatakan sebagai berikut:
Dengan skala maksimum 400 volt, maka:
a. jelaskan arti simbul-simbol diatas
b. bila dipakai untuk mengukur tegangan phasa dari suatu sistem 3 phasa 220/ 380 V, berapa kesalahan
maksimum yang dapat terjadi (%).
c. Berdasarkan prinsip kerja, mungkinkah alat ini untuk mengukur tegangan searah.
Jawab:
a. alat ukur voltmeter:
Jenis besi putar
Posisi pengukuran horizontal
Digunakan untuk pengukuran arus bolak-balik
0.5 KLAS 0.5
Tegangan testing lebih dari 500 V (2 kV)
b. Sistem 3 phasa 220/ 380:
KLAS alat ukur 0.5
0.5 2
2

8
Jadi kesalahan alat ukur voltmeter V:
2400100
5.0
100 skala
KLASV volt.
Bila tegangan yang ditunjukkan oleh alat ukur dalam pengukuran 220 volt (= harga
maksimum) atau dalam harga efektif 220/ 2 , maka kesalahan (%):
1.285649%1002220
2%100%
V
VV %
c. berdasarkan prinsip kerja, maka alat ukur besi putar berlaku untuk arus bolak-balik dan arus searah.
Contoh-5:Untuk mengukur tegangan yang besarnya 67 V, digunakan:
a. alat ukur klas 0.5 dan skala penuh 250V
b. alat ukur klas 1 dan skala penuh 100V
jawab:
a. kesalahan alat ukur V
25.1250100
5.0
100 skala
KLASV volt
1.865672%10067
25.1%100%
V
VV
b. kesalahan V
1100100
1
100 skala
KLASV volt
1.492537%10067
1%100%
V
VV %
Contoh-6: Sebuah alat ukur membaca 127.5 volt dan harga benar 127.43 volt, dapatkan:
a. kesalahan
b. koreksi
jawab:
a. kesalahan
= M –T = 127.5 – 127.43 = 0.07 volt
0.054932%10043.127
07.0%100%
T%
b. koreksi C
C = T – M = 127.43 - 127.5 = - 0.07 volt
9
BAB II. AMPERMETER, VOLTMETER DAN OHMMETER
2.1 Pendahuluan
Ampermeter dan voltmeter analog diklasifikasikan bersama sebagai tidak ada perbedaan mendasar
dalam hal prinsip kerjanya. Gerakan semua ampermeter dan voltmeter, kecuali jenis elektrostatis
tergantung Torsi defleksi yang dihasilhan oleh arus listrik. Pada ampermeter, Torsi ini dihasilkan oleh arus
yang diukur atau bagian yang terbatas dari padanya. Pada voltmeter, Torsi ini dihasilkan oleh arus yang
sebanding dengan tegangan yang diukur. Oleh karena itu semua voltmeter dan ampermeter secara esensi
sesuai dengan arus yang mengalir.
Peralatan utama alat ukur yaitu:
1. Rangkaian pengganti alat ukur yang dibuat,
2. daya yang diperkirakan untuk operasi kecil.
Ampermeter dihubungkan secara seri kedalam rangkaian yang mempunyai arus yang diukur.
Karena itu sepantasnya mempunyai tahanan listrik kecil. Hal yang mendasar ini supaya menyebabkan
tegangan jatuh kecil dan sebagai akibatnya menyerap daya kecil.
Voltmeter dihubungkan secara paralel dengan rangkaian yang mempunyai arus yang diukur.
Karena itu sepantasnya voltmeter mempunyai tahanan listrik besar. Hal ini dilakukan supaya arus yang
mengalir kecil dan sebagai akibatnya menyerap daya kecil.
Ohmmeter dipakai untuk mengukur tahanan. Alat ukur ini terdiri dari sumber tegangan dan
komponen arus yang diukur.
Daya hilang
Tahanan ampermeter aR dan arus yang mengalir I sedang diukur,oleh karena itu daya yang
hilang pada ampermeter adalah aa RIP 2 watt.
Jika VR tahanan voltmeter dan V tegangan yang sedang diukur, maka daya yang hilang pada
voltmeter adalahV
VR
VP
2
watt.
Oleh karena itu supaya daya yang hilang pada alat ukur adalah kecil, tahanan ampermeter
sepantasnya kecil dan tahanan voltmeter adalah besar.
10
2.2 Jenis alat ukur
Jenis alat ukur utama yang biasa dipakai sebagai ampermeter dan voltmeter adalah
a. Kumparan putar magnit tetap (Permanent Magnet Moving Coil)
b. Besi putar
a. Elektrodinamik
b. Thermokopel
c. Induksi
d. Elektrostatis
Jenis kumparan tetap hanya dapat dipakai untuk pengukuran arus searah dan jenis induksi hanya
dapat dipakai untuk pengukuran arus bolak-balik. Jenis yang lain dapat dipakai salah satu arus searah atau
arus bolak-balik.
Jenis besi putar dan kumparan putar tergantung gerakan magnit yang mempengaruhi arus.Bentuk
yang paling umum biasanya membentuk penunjukan alat ukur, dan juga paling murah. Ini dapat dipakai
untuk salah satu pengukuran arus searah atau arus bolak-balik dan jika dirancang sangat tepat. Alat ukur
kumparan putar jenis paling tepat untum pengukuran arus searah dan alat ukur jenis ini adalah sering
dibangun mampunyai ketepatan tidak standard.
Jenis alat ukur elektrodinamik dipakai untuk kedua pengukuran arus bolak-balik dan juga arus
searah. Kalibrasinya untuk keduanya adalah sama dan disini alat ukur elektrodinamik sangat berguna
sebagai alat ukur transfer.
Alat ukur thermal mempunyai keuntungan bahwa kalibrasinya sama untuk kedua dc dan ac.
Terutama sesuai untuk pengukuran arus bolak-balik. dimana defleksinya tergantung secara langsung dari
pemanasan yang mempengaruhi arus bolak-balik, yakni arus efektif. Pembacaannya oleh karena itu tidak
tergantung frekuensi atau bentuk gelombang arus dan beberapa medan magnit yang menyimpang yang
mungkin ada disekitarnya.
Sebagai voltmeter, jenis alat ukur elektrostatis mempunyai keuntungan bahwa pemakaian dayanya
kecil. Voltmeter jenis ini dapat dipakai untuk range tegangan yang besar dan dapat dibangun tidak tepat.
Ketidakuntungan utama bahwa jenis elektrostatis hanya secara langsung mampu pengukuran tegangan.
11
Prinsip induksi lebih umum dipakai untuk alat ukur watt jam (KWH meter) dari pada ampermeter
dan voltmeter yang mempunyai harga tinggi dan tidak tepat dari alat ukur induksi dari jenis yang lain.
Kesalahan pada ampermeter dan voltmeter.
Terdapat kesalahan tertentu yang terjadi pada kebanyakan alat ukur, sementara kesalahan yang lain
hanya pada jenis yang khusus. Kesalahan yang terakhir ini akan menyetujui lebih lanjut bersama dengan
alat ukur dimana terjadi.
Kesalahan umum kebanyakan jenis alat ukur, kesalahan gesekan dan kesalahan temperatur adalah
barangkali sesuatu hal yang sering terjadi. Untuk menurunkan pengaruh Torsi gesekan dan sebagai
akibatnya kesalahan menurun oleh sistemyang bergerak harus dibuat sekecil mungkin dibandingkan
dengan gaya yang bekerja, yakni perbandingan Torsi terhadap berat harus besar (sekitar 1/10 pada skala
penuh).
Kebanyakan kesalahan serius dihasilkan oleh panas yang timbul dalam alat ukur, atau oleh
perubahan temperatur lingkungan, akibat dari perubahan tahanan kumparan kerja.
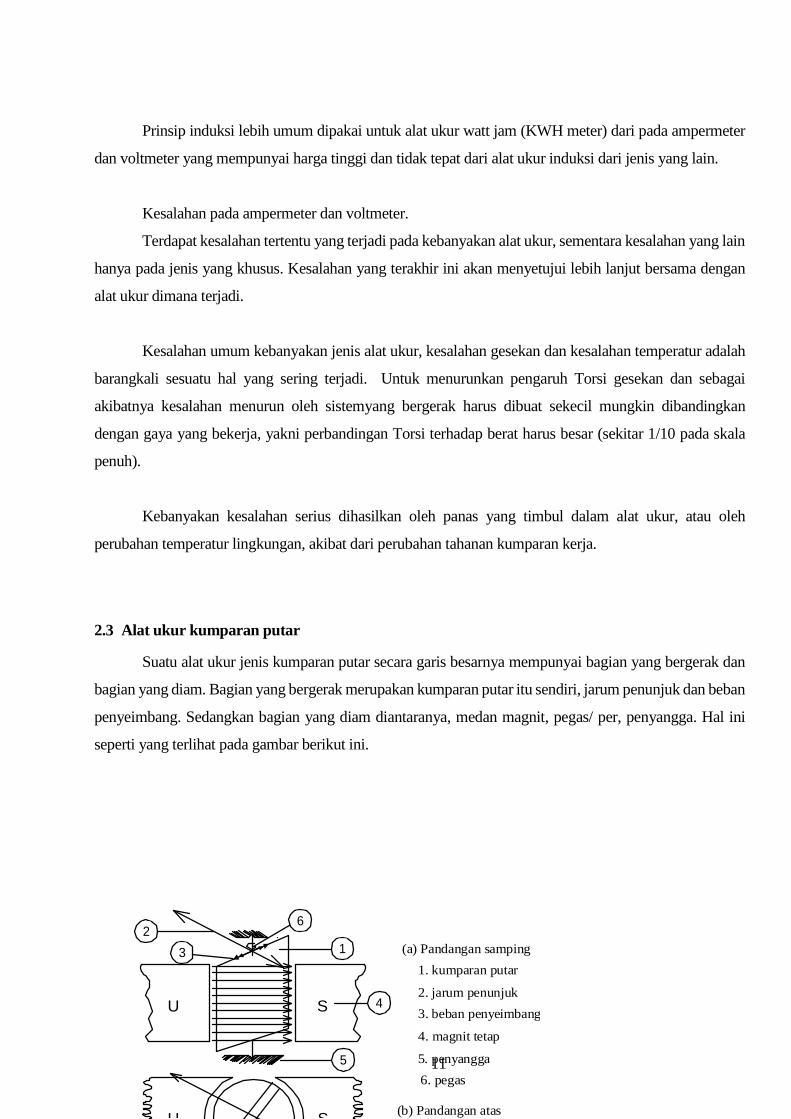
2.3 Alat ukur kumparan putar
Suatu alat ukur jenis kumparan putar secara garis besarnya mempunyai bagian yang bergerak dan
bagian yang diam. Bagian yang bergerak merupakan kumparan putar itu sendiri, jarum penunjuk dan beban
penyeimbang. Sedangkan bagian yang diam diantaranya, medan magnit, pegas/ per, penyangga. Hal ini
seperti yang terlihat pada gambar berikut ini.
(a) Pandangan samping
(b) Pandangan atas
1. kumparan putar
2. jarum penunjuk
3. beban penyeimbang
4. magnit tetap
5. penyangga
6. pegas
U S
1
4
5
3
26
U S
12
Pemberian contoh dimulai dari jenis kumparan putar, kemudian dikembangkan untuk jenis alat-alat
ukur yang lain.
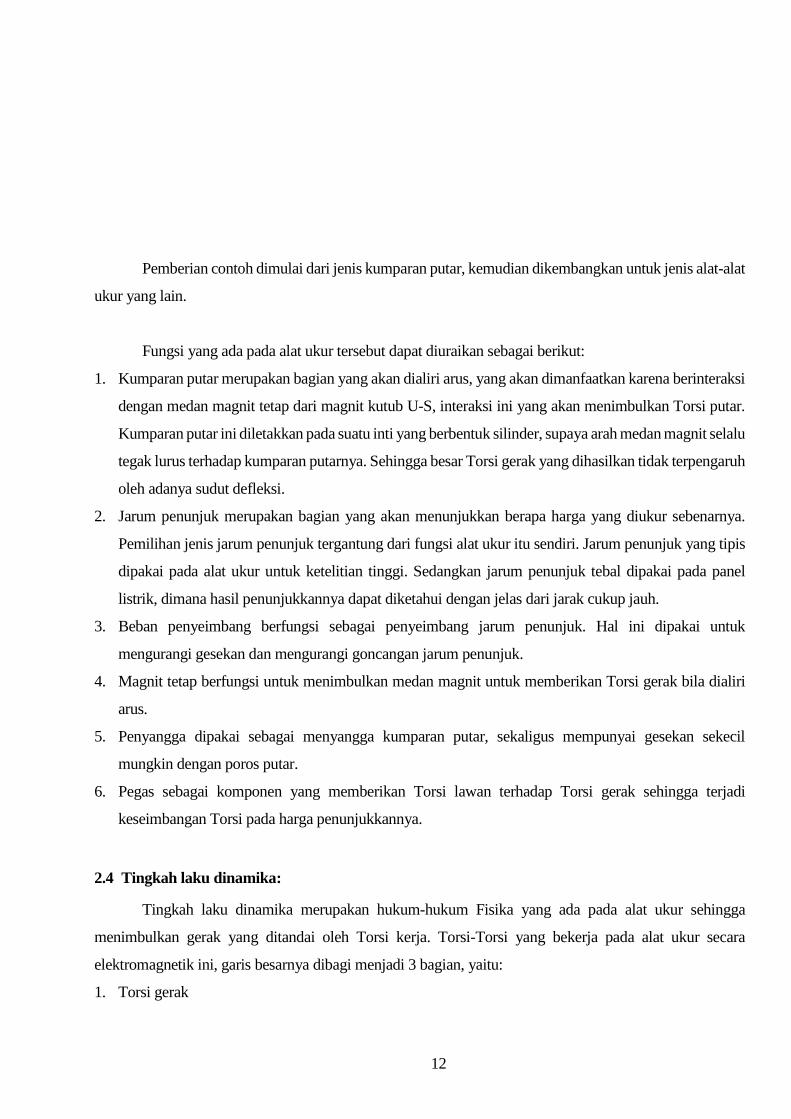
Fungsi yang ada pada alat ukur tersebut dapat diuraikan sebagai berikut:
1. Kumparan putar merupakan bagian yang akan dialiri arus, yang akan dimanfaatkan karena berinteraksi
dengan medan magnit tetap dari magnit kutub U-S, interaksi ini yang akan menimbulkan Torsi putar.
Kumparan putar ini diletakkan pada suatu inti yang berbentuk silinder, supaya arah medan magnit selalu
tegak lurus terhadap kumparan putarnya. Sehingga besar Torsi gerak yang dihasilkan tidak terpengaruh
oleh adanya sudut defleksi.
2. Jarum penunjuk merupakan bagian yang akan menunjukkan berapa harga yang diukur sebenarnya.
Pemilihan jenis jarum penunjuk tergantung dari fungsi alat ukur itu sendiri. Jarum penunjuk yang tipis
dipakai pada alat ukur untuk ketelitian tinggi. Sedangkan jarum penunjuk tebal dipakai pada panel
listrik, dimana hasil penunjukkannya dapat diketahui dengan jelas dari jarak cukup jauh.
3. Beban penyeimbang berfungsi sebagai penyeimbang jarum penunjuk. Hal ini dipakai untuk
mengurangi gesekan dan mengurangi goncangan jarum penunjuk.
4. Magnit tetap berfungsi untuk menimbulkan medan magnit untuk memberikan Torsi gerak bila dialiri
arus.
5. Penyangga dipakai sebagai menyangga kumparan putar, sekaligus mempunyai gesekan sekecil
mungkin dengan poros putar.
6. Pegas sebagai komponen yang memberikan Torsi lawan terhadap Torsi gerak sehingga terjadi
keseimbangan Torsi pada harga penunjukkannya.
2.4 Tingkah laku dinamika:
Tingkah laku dinamika merupakan hukum-hukum Fisika yang ada pada alat ukur sehingga
menimbulkan gerak yang ditandai oleh Torsi kerja. Torsi-Torsi yang bekerja pada alat ukur secara
elektromagnetik ini, garis besarnya dibagi menjadi 3 bagian, yaitu:
1. Torsi gerak
13
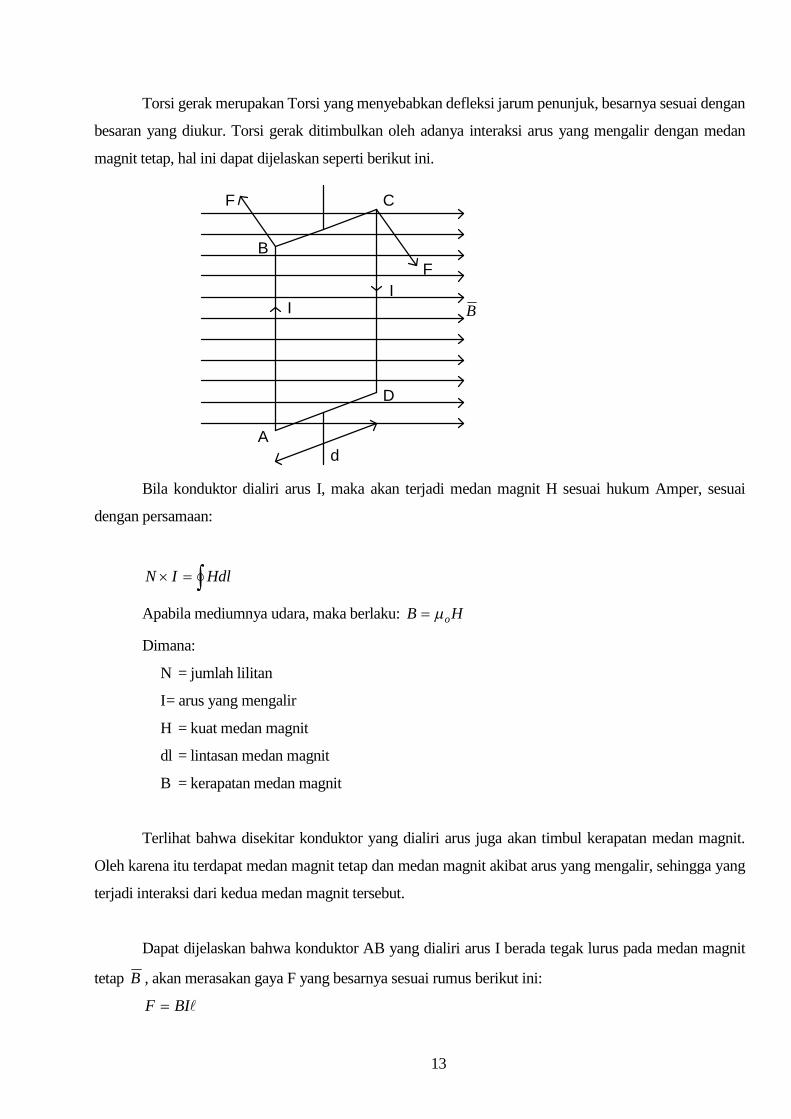
Torsi gerak merupakan Torsi yang menyebabkan defleksi jarum penunjuk, besarnya sesuai dengan
besaran yang diukur. Torsi gerak ditimbulkan oleh adanya interaksi arus yang mengalir dengan medan
magnit tetap, hal ini dapat dijelaskan seperti berikut ini.
Bila konduktor dialiri arus I, maka akan terjadi medan magnit H sesuai hukum Amper, sesuai
dengan persamaan:
HdlIN
Apabila mediumnya udara, maka berlaku: HB o
Dimana:
N = jumlah lilitan
I= arus yang mengalir
H = kuat medan magnit
dl = lintasan medan magnit
B = kerapatan medan magnit
Terlihat bahwa disekitar konduktor yang dialiri arus juga akan timbul kerapatan medan magnit.
Oleh karena itu terdapat medan magnit tetap dan medan magnit akibat arus yang mengalir, sehingga yang
terjadi interaksi dari kedua medan magnit tersebut.
Dapat dijelaskan bahwa konduktor AB yang dialiri arus I berada tegak lurus pada medan magnit
tetap B , akan merasakan gaya F yang besarnya sesuai rumus berikut ini:
BIF
B
A
D
C
B
d
II
F
F

14
dimana:
F = gaya
B = kerapatan medan magnit (wb/m2)
= panjang konduktor/ kumparan (m)
d = lebar kumparan (m)
I = arus yang mengalir dalam konduktor (amper)
Gaya F ini juga akan dirasakan pada konduktor CD, akan tetapi mempunyai arah, karena arah arus
IAB berlawanan arah dengan arus ICD. Torsi yang diakibatkan konduktor AB terhadap sumbu putar (poros)
yang jaraknya d/2 adalah:
2dFT
2dBIT
Sehingga Torsi gerak yang ditimbulkan oleh konduktor ABCD (1 putaran atau jumlah lilitan N=1)
adalah:
MTd 2
22 dBITd
dBITd
Apabila kumparan terdiri N lilitan, maka dT (Torsi gerak) besarnya,
dIBNTd
2.5 Torsi kontrol
Torsi kontrol juga disebut Torsi lawan, karena arah Torsi ini berlawanan terhadap arah Torsi gerak.
Fungsi Torsi kontrol ini adalah mengontrol hasil pengukuran yang harus sesuai dengan besaran yang diukur
pada skala yang telah ditentukan. Torsi kontrol ini besarnya sesuai sudut defleksi dan secara umum dapat
ditulis dalam fungsi:
fTc
KTc
dimana: K = suatu konstanta (konstata pegas radN )

15
Dalam keadaan seimbang pada titik penunjukkan, maka besarnya sama dengan Torsi gerak dc TT
. Secara umum pula Torsi lawan dapat dibagi dalam 3 bagian yaitu:
1. sistem gravitasi
sinWTc
sinWTc
sinKTc
dimana: K = konstanta
2. sistem pegas
Pegas/ per yang dipergunakan harus mempunyai ketentuan sifat-sifat sebagai berikut:
tidak bersifat magnetik, baik magnit tetap maupun magnit buatan (karena induksi), hal ini dipakai untuk
menghindari kesalahan penunjukkan.
Bebas dari pengaruh kelelahan mekanik, supaya Torsi lawan yang dihasilkan selalu tetap untuk sudut
tertentu.
Bila pegas akan dilalui arus yang diukur, maka harus mempunyai tahanan yang kecil serta koefisien
tahanan temperatur juga kecil.
Bahan yang digunakan untuk maksud itu adalah silikon bronze, tembaga, platina perak, platina
iridium juga germanium perak, khusus yang mempunyai tahanan kecil digunakan alloy dari bronze.
Konstruksi dari sistem pegas ini dapat dilihat pada gambar berikut ini.
W
(a)
W
Wsin
Wcos
(b)
b
t
(a) (b)

16
Bagian luar dijepit pada tempat yang tetap, sedang bagian dalam berhubungan poros jarum
penunjuk yang dilengkapi pengaturpenunjukkan nol. Panjang pegas harus pada defleksi penuh tidak
mengalami deformasi mekanik. Besar Torsi yang dihasilkan (Torsi kontrol cT ) sebanding dengan sudut
defleksinya.
12
3EbtTc
STc
12
3EbtS
Dimana: cT = Mome kontrol (kg.m)
E = modulus Young (kg/m2)
b = lebar pegas (m)
t = tebal pegas (m)
= panjang pegas (m)
= sudut defleksi (rad)
S = konstanta pegas (kg.m/rad)
Pegas akan bekerja bila gaya bekerja tidak melampui elastisitasnya pada defleksi penuh. Besar gaya
maksimum yang diperbolehkan:
2
6
bt
TF c
mak kg/m2
2
makF
E
t
Sebagai contoh: phospor bronze, gaya maksimum yang diperbolehkan, 6103makF kg/m2 & E
= 12 x 109 kg/m2.
20002103
10126
9
t
Bila defleksi maksimum o902180 , maka 3000t
17
Sistem diatas akan bekerja baik bila perbandingan panjang terhadap tebal tidak boleh kurang dari
3000.
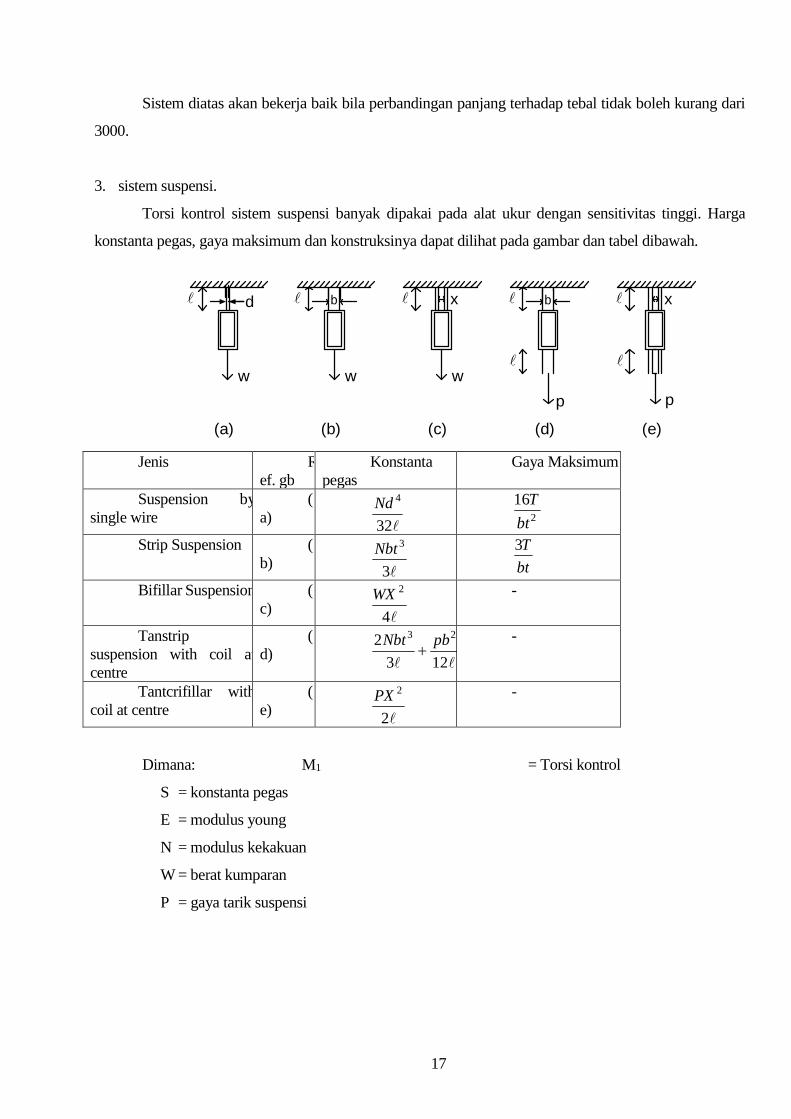
3. sistem suspensi.
Torsi kontrol sistem suspensi banyak dipakai pada alat ukur dengan sensitivitas tinggi. Harga
konstanta pegas, gaya maksimum dan konstruksinya dapat dilihat pada gambar dan tabel dibawah.
Jenis Ref. gb
Konstantapegas
Gaya Maksimum
Suspension bysingle wire
(a)
32
4Nd2
16
bt
T
Strip Suspension (b)
3
3Nbtbt
T3
Bifillar Suspension (c)
4
2WX -
Tanstripsuspension with coil atcentre
(d)
123
2 23 pbNbt
-
Tantcrifillar withcoil at centre
(e)
2
2PX -
Dimana: M1 = Torsi kontrol
S = konstanta pegas
E = modulus young
N = modulus kekakuan
W = berat kumparan
P = gaya tarik suspensi
d
w
w
b
w
x
(a) (b) (c) (d) (e)
p
b
p
x
18
2.5.1 Torsi redam dan Torsi inersia.
Diatas disebutkan dalam keadaan seimbang pada penunjukkan terakhir, maka besarnya Torsi gerak
sama dengan Torsi kontrolnya. Namun pada waktu menuju titik keseimbangan akan sangat tergantung
besarnya Torsi redam ( DT ) dan Torsi inersia ( iT ) atau dengan kata lain dc TT lagi, terjadi keseimbangan
antara Torsi gerak dengan Torsi inersia, Torsi redam dan Torsi kontrol atau cDid TTTT .
Dinamika alat ukur menuju keseimbangan ini sangat ditentukan oleh ke 4 Torsi ini, sehingga
menghasilkan ukuran redaman. Bila redamannya besar disebut redaman lebih (over damped), waktu untuk
mencapai keseimbangan lama, hal semacam ini tidak diinginkan. Demikian juga untuk redaman kurang
(under damped), waktu untuk mencapai keseimbangan juga lama, hal inipun tidak diinginkan juga. Sebagai
jalan tengah diambil diantaranya yang menghasilkan redaman kritis (critical damped), dimana waktu untuk
mencapai keseimbangan cepat. Untuk lebih jelasnya dapat dilihat kurva berikut ini.
Kurva defleksi terbagi atas 3 bagian, yaitu:
1. kurva defleksi dalam kondisi redaman lebih (over damped),
2. kurva defleksi dalam kondisi redaman kurang (under damped) dan
3. kurva defleksi dalam kondisi redaman kritis (critical damped).
Torsi redaman tidak mempengaruhi hasil penunjukan akhir, akan tetapi hanya berpengaruh pada
waktu menuju keseimbangan. Sifat dari torsi redaman selalu melawan arah pergerakan dan besarnya
sebading dengan kecepatan sudut defleksinya.
Bebarapa metoda untuk mendapatkan redaman diatas adalah:
redaman karena udara,
F
2
3
1
t

19
redaman karena fluida (minyak) dan
redaman karena arus pusar (eddy current).
Redaman karena udara dapat dilihat pada gambar dibawah ini:
Keterangan gambar diatas:
1) Ruang udara,
2) Piston/ torak dan
3) Kipas/ van.
Terlihat pada gambar diatas bahwa untuk setiap gerakan selalu mendapat redaman dari udara.
Redaman karena fluida mempunyai prinsip kerja yang sama dengan redaman karena udara, hanya
saja mediumnya adalah fluida (minyak). Konstruksi dari sistem ini dapat dilihat pada gambar berikut ini.
Keterangan gambar: a).pandangan samping b). pandangan atas.
1
2 3
(a) (b)
(b)
fluida
rotasi
(a)
fluida
rotasi
20
Kerugian pada sistem fluida ini adalah posisi alat ukur harus selalu tegak lurus dan tidak cocok
untuk alat ukur portabel.
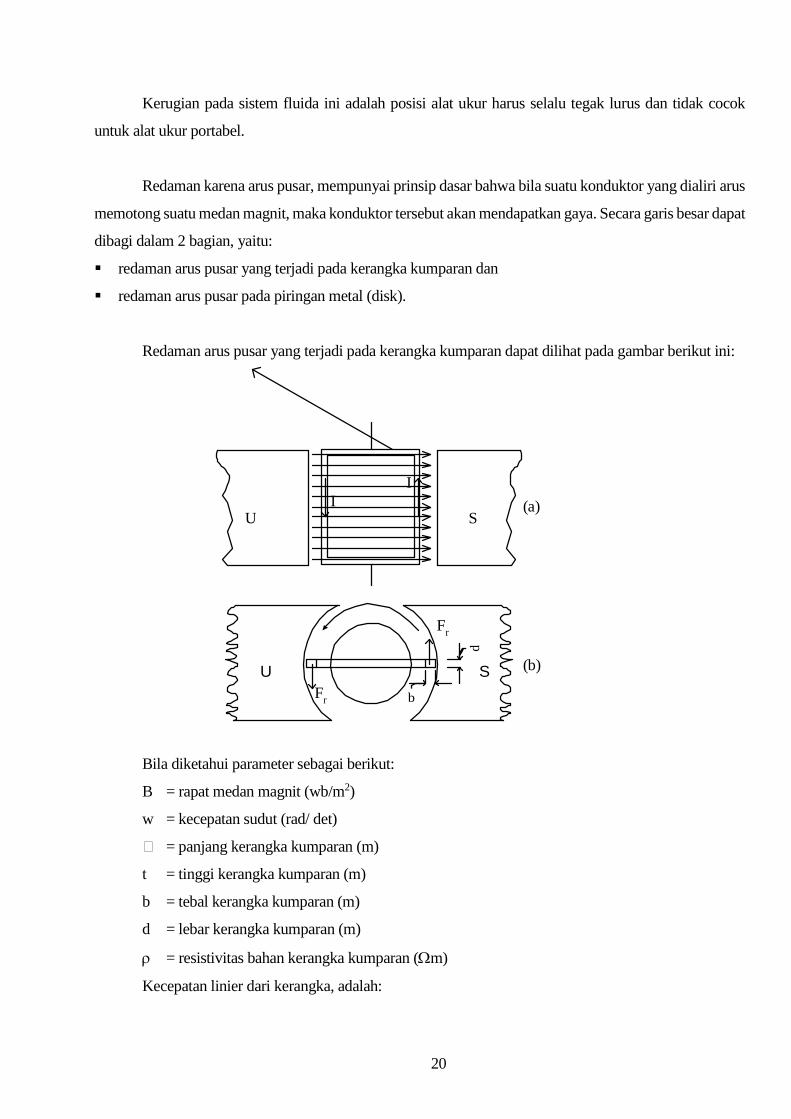
Redaman karena arus pusar, mempunyai prinsip dasar bahwa bila suatu konduktor yang dialiri arus
memotong suatu medan magnit, maka konduktor tersebut akan mendapatkan gaya. Secara garis besar dapat
dibagi dalam 2 bagian, yaitu:
redaman arus pusar yang terjadi pada kerangka kumparan dan
redaman arus pusar pada piringan metal (disk).
Redaman arus pusar yang terjadi pada kerangka kumparan dapat dilihat pada gambar berikut ini:
Bila diketahui parameter sebagai berikut:
B = rapat medan magnit (wb/m2)
w = kecepatan sudut (rad/ det)
= panjang kerangka kumparan (m)
t = tinggi kerangka kumparan (m)
b = tebal kerangka kumparan (m)
d = lebar kerangka kumparan (m)
= resistivitas bahan kerangka kumparan (m)
Kecepatan linier dari kerangka, adalah:
U S
d
Fr
Fr b
U SI
I
(a)
(b)

21
wd
V2
Tegangan induksi masing-masing sisi kerangka adalah:
21
dwBVBe
Tegangan induksi untuk 2 sisi kerangka, adalah:
dBee 12 2
Tahanan dari lintasan arus pusar adalah:
luas
panjangsistivitasR
Re
tb
dR
2
bt
dR
2
d
btdB
R
eI
2
Gaya redaman, besarnya adalah:
IBFr
d
btdBBFr
2
d
btdBFr
2
22
d
btdBFr
2
22
Sedangkan torsi redaman dapat dihitung, sebagai berikut:
d
d
btdBdFT rD
2
22
d
btdBTD
2
222
DTD
d
btdBD
2
222
merupakan konstanta redaman
22
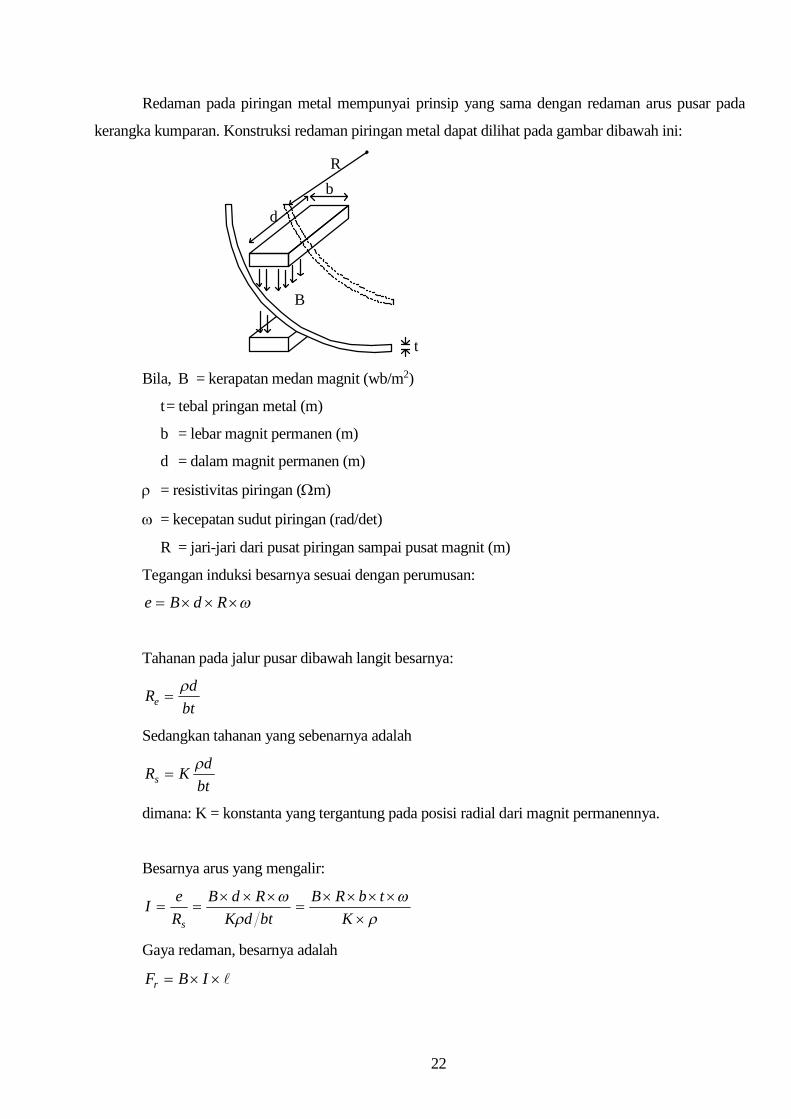
Redaman pada piringan metal mempunyai prinsip yang sama dengan redaman arus pusar pada
kerangka kumparan. Konstruksi redaman piringan metal dapat dilihat pada gambar dibawah ini:
Bila, B = kerapatan medan magnit (wb/m2)
t= tebal pringan metal (m)
b = lebar magnit permanen (m)
d = dalam magnit permanen (m)
= resistivitas piringan (m)
= kecepatan sudut piringan (rad/det)
R = jari-jari dari pusat piringan sampai pusat magnit (m)
Tegangan induksi besarnya sesuai dengan perumusan:
RdBe
Tahanan pada jalur pusar dibawah langit besarnya:
bt
dRe
Sedangkan tahanan yang sebenarnya adalah
bt
dKRs
dimana: K = konstanta yang tergantung pada posisi radial dari magnit permanennya.
Besarnya arus yang mengalir:
K
tbRB
btdK
RdB
R
eI
s
Gaya redaman, besarnya adalah
IBFr
B
b
d
R
t
23
dK
BRbtBFr
K
RbtdBFr
2
Torsi redaman, besarnya adalah
K
btdRBRFT rD
22
K
btdRBTD
222
Nm
rD DT
K
btdBDr
222 merupakan konstanta redaman
Contoh soal:
1 suatu alat ukur dengan pegas sebagai torsi kontrolnya, mempunyai dimensi panjang 370 mm, tebal
0,073 mm, lebar 0.51 mm. Modulus Young 1.15 x 1010 kg/m2. Hitung besarnya torsi kontrol bila sudut
defleksi 90.
Jawab:
12
3EbtTc
21037012
10073.01051.01015.13
33310
cT
6108.0 cT kg.m
2 Suatu ampermeter mempunyai torsi gerak yang sebanding dengan kuadrat arus yang diukur. Untuk
arus 5A, maka sudut defleksinya 90.
Hitung sudut defleksinya untuk arus 3A, bila
a) Torsi kontrol dari gravitasi
b) Torsi kontrol dari pegas
Jawab:
Torsi gerak diketahui besarnya
2KITd

24
a) Torsi kontrol dari gravitasi
sinkgTc
pada keadaan keseimbangan cd TT
sin2 kgKI sehingga 2sin Ikg
K
22
21
2
1
sin
sin
I
I
dimana 21 , 51 I amper & 32 I amper
Dapat dihitung besarnya sudut defleksi 2
o
I
I1.2136.0arcsin1
5
3arcsinsinarcsin
2
2
121
22
2
b) Torsi kontrol dari pegas
STc
pada keadaan keseimbangan cd TT
SKI 2 sehingga 2IS
K
22
21
2
1
I
I
dimana 21 , 51 I amper & 32 I amper
Dapat dihitung besarnya sudut defleksi 2
oo
I
I4.3290
5
32
2
121
22
2
2.6 Alat ukur besi putar
defleksiperubahangerakTorsiP
dTP d
dt
LIdU
dt
dLI
dt
dILU
Perubahan energi supplai
UIdtES
25
Idtdt
dLI
dt
dILES
dLILIdIES2
dLIdLLdIIEL2
212
21
dLIdLLIdIdIIEL2
21222
21 2
dLIIdLdILdIdldILIdIdLILIEL2
212
212
212
212
21 2
dLILIdIEL2
21
Perubahan energi supplai = perubahan energi tersimpan pada kumparan L + kerja
PEE LS
dTdLILIdIdLILIdI d 2212
dTdLI d221
d
dLITd
221
Bila torsi kontrol menggunakan pegas dengan konstanta pegas sebesar S, maka dalam keadaan
seimbang:
cd TT
Sd
dLI 2
21
d
dL
S
I 2
21
Macam-macam alat ukur besi putar mempunyai jenis-jenis antara lain:
Jenis Tarikan
U SF
U S
I
(a)
I
F
(b)
26
BAB III. PENGUKURAN DAYA
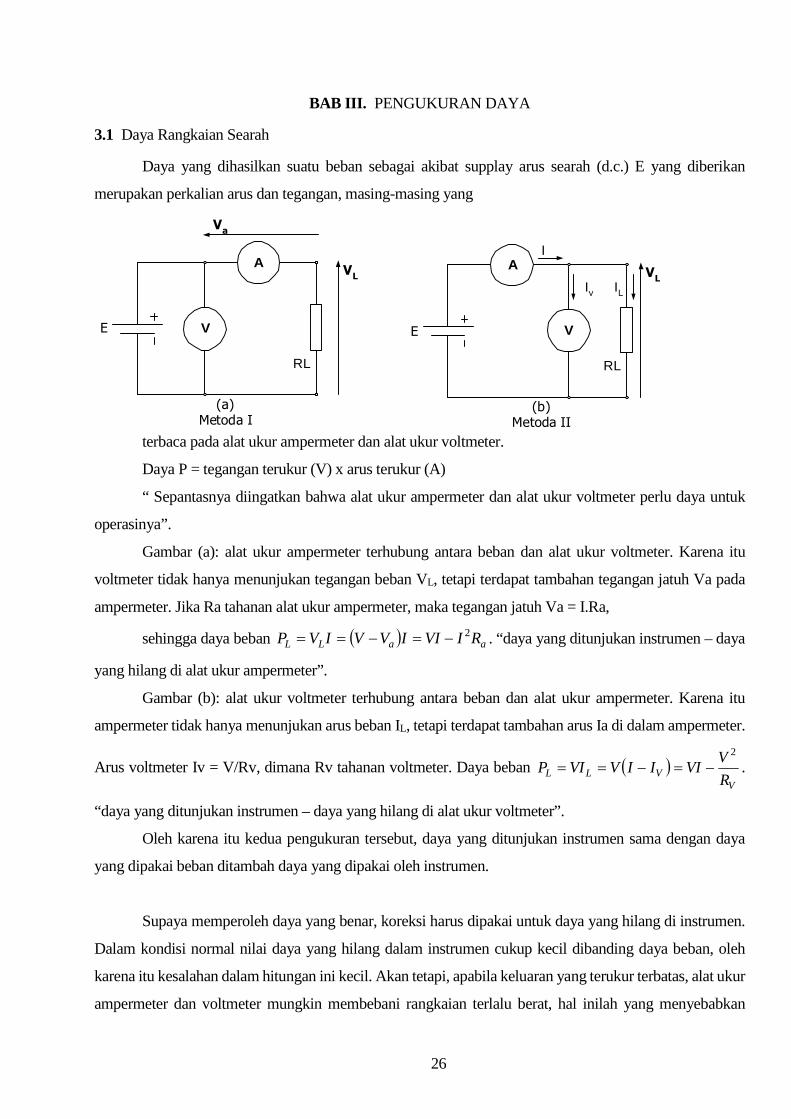
3.1 Daya Rangkaian Searah
Daya yang dihasilkan suatu beban sebagai akibat supplay arus searah (d.c.) E yang diberikan
merupakan perkalian arus dan tegangan, masing-masing yang
terbaca pada alat ukur ampermeter dan alat ukur voltmeter.
Daya P = tegangan terukur (V) x arus terukur (A)
“ Sepantasnya diingatkan bahwa alat ukur ampermeter dan alat ukur voltmeter perlu daya untuk
operasinya”.
Gambar (a): alat ukur ampermeter terhubung antara beban dan alat ukur voltmeter. Karena itu
voltmeter tidak hanya menunjukan tegangan beban VL, tetapi terdapat tambahan tegangan jatuh Va pada
ampermeter. Jika Ra tahanan alat ukur ampermeter, maka tegangan jatuh Va = I.Ra,
sehingga daya beban aaLL RIVIIVVIVP 2 . “daya yang ditunjukan instrumen – daya
yang hilang di alat ukur ampermeter”.
Gambar (b): alat ukur voltmeter terhubung antara beban dan alat ukur ampermeter. Karena itu
ampermeter tidak hanya menunjukan arus beban IL, tetapi terdapat tambahan arus Ia di dalam ampermeter.
Arus voltmeter Iv = V/Rv, dimana Rv tahanan voltmeter. Daya beban V
VLLR
VVIIIVVIP
2
.
“daya yang ditunjukan instrumen – daya yang hilang di alat ukur voltmeter”.
Oleh karena itu kedua pengukuran tersebut, daya yang ditunjukan instrumen sama dengan daya
yang dipakai beban ditambah daya yang dipakai oleh instrumen.
Supaya memperoleh daya yang benar, koreksi harus dipakai untuk daya yang hilang di instrumen.
Dalam kondisi normal nilai daya yang hilang dalam instrumen cukup kecil dibanding daya beban, oleh
karena itu kesalahan dalam hitungan ini kecil. Akan tetapi, apabila keluaran yang terukur terbatas, alat ukur
ampermeter dan voltmeter mungkin membebani rangkaian terlalu berat, hal inilah yang menyebabkan
V
A
E
RL
(a)Metoda I
VL
Va
VE
RL
(b)Metoda II
AV
LILIv
I
27
sebuah kesalahan yang serius. Untuk instalasi, pada umumnya pengukuran daya dipasang wattmeter yang
memberikan pembacaan langsung.
3.2 Daya rangkaian arus bolak balik
Dalam hal pengukuran arus bolak-balik, daya berubah sesuai perubahan arus dan tegangan. Namun
yang penting adalah parameter daya rata-rata P. Apabila diketahui tegangan
tVtVtv m sin2sin dan
arus tItIti m sin2sin , maka daya sesaat yang berubah-ubah tersebut dapat
dihitung sebagai berikut:
daya ttVIttIVtitvtp mm sinsin2sinsin
rumus coscossinsin 21
21 , sehingga berubah menjadi
daya
tVItVItp 2coscos2coscos2
12 .
Daya rata-rata didefinisikan sebagai T
dttpT
P0
1
T
VIdttVIT
P0
cos2coscos1
atau dengan kata lain
faktor dayaVI
Pcos
Dimana:V = tegangan efektif
I = arus efektif
cos faktor daya
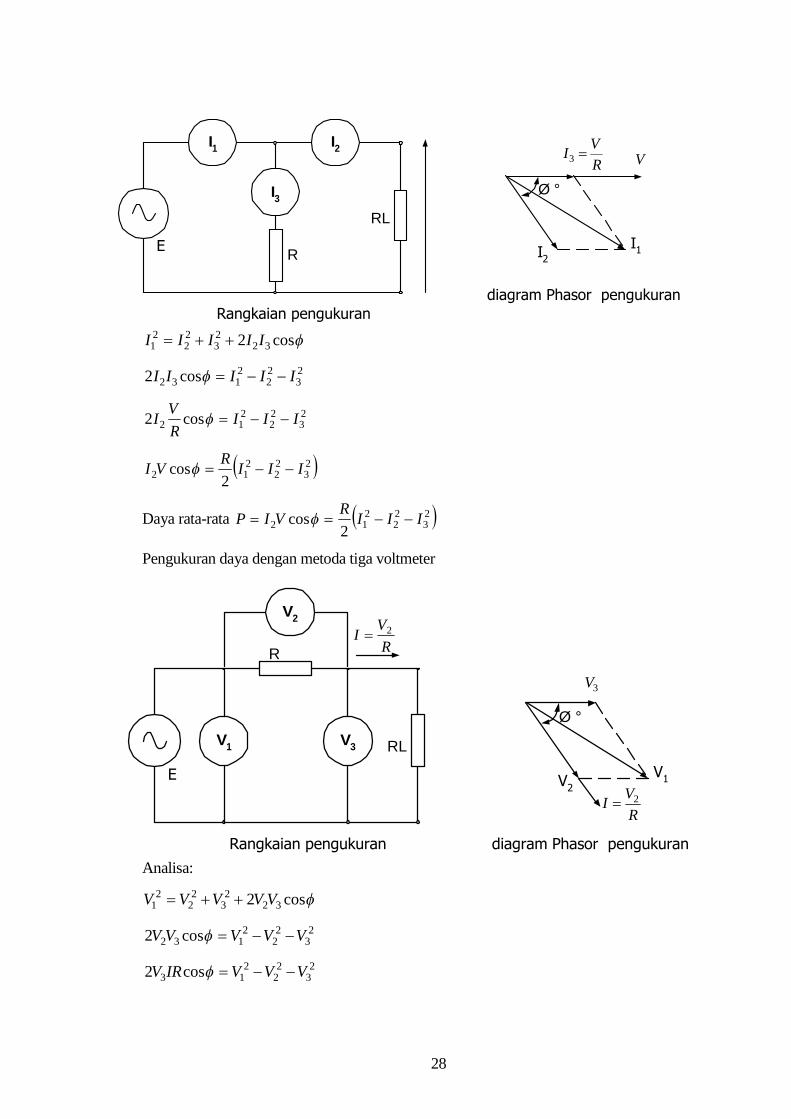
Pengukuran daya dengan metoda tiga ampermeter
Analisa:
28
cos2 3223
22
21 IIIII
23
22
2132 cos2 IIIII
23
22
212 cos2 III
R
VI
23
22
212
2cos III
RVI
Daya rata-rata 23
22
212
2cos III
RVIP
Pengukuran daya dengan metoda tiga voltmeter
Analisa:
cos2 322
32
22
1 VVVVV
23
22
2132 cos2 VVVVV
23
22
213 cos2 VVVIRV
I3
I2
RL
Rangkaian pengukuran
I1
RE
diagram Phasor pengukuran
Ø °
R
VI 3 V
I2
I1
diagram Phasor pengukuran
Ø °
3V
R
VI 2
V2
V1
V2
V3 RL
Rangkaian pengukuran
V1
R
E
R
VI 2
29
Daya rata-rata 23
22
213
2
1cos VVV
RIVP
3.3 Pengukuran daya dengan Wattmeter
Jenis alat ukur wattmeter adalah elektrodinamik (=elektrodinamometer) dengan 2 kumparan
dihubungkan dengan rangkaian beda (rangkaian tegangan dan rangkaian arus).
Konstruksi Alat ukur wattmeter, terdiri dari:
kumparan tetap (=kumparan medan) dihubungkan secara seri dengan beban dan membawa arus.
Kumparan tetap, oleh karena itu membentuk kumparan arus dari pada wattmeter.
Kumparan putar dihubungkan langsung ke tegangan, oleh karena itu membawa arus yang
sebanding besarnya tegangan yang diukur.
Prinsip kerja alat ukur jenis elektrodinamik:
“Momen gerak yang menyebabkan defleksi jarum penunjuk, terjadi disebabkan oleh interaksi
kedua medan magnit (medan magnit secara buatan) yang ditimbulkan oleh kedua arus sehingga membuat
defleksi dengan arah tertentu”.
Persamaan momen:
Penggambaran rangkaian alay ukur elektrodinamik se[erti terlihat berikut ini:
1i = arus sesaat kumparan tetap
L1 L2
R1 R2
M
e2
e1
i2i1
kumparan putar
kumparan tetap
i
skala

30
2i = arus sesaat kumparan gerak
1L = induktansi kumparan tetap
2L = induktansi kumparan gerak
1R = tahanan kumparan tetap
2R = tahanan kumparan gerak
M = induktansi bersama kumparan tetap dan gerak
Persamaan momen
Fluksi kumparan 1,t
eMiiL
1
12111
Fluksi kumparan 2,t
eMiiL
2
21222
Energi listrik masuk iE
22112211 dididtiedtie
1221222
2222121121111
12222111MdiidMiidLi
diLiMdiidMiidLidiLiMiiLdiMiiLdi
Energi tersimpan dalam medan magnit MiiLiLi 212222
11
212
1
Perubahan energi tersimpan E
dMiiMdiiMdiidLidiLidLidiLiMiiLiLid 2112212222
12221
212
1111212
222
11
212
1
Prinsip hukum kekekalan energi:
Total energi = perubahan yang tersimpan + energi mekanik
Energi mekanik = total energi – perubahan energi yang tersimpan
EEE im
122222
122221211
212
1111
122122222221211
21111
MdiidLidiLiMdiidMiidLidiLi
MdiidMiidLidiLiMdiidMiidLidiLiEm
2222
11
212
1
212221
21
dLidLi
dMiidLidLiEm
dMiidLidLiEm 212222
11
212
1
Karena kumparan L1 dan kumparan L2 tidak berubah, maka dL1 =0, dL2 =0 dan

31
dMiiEm 21
Untuk momen gerak Ti dan perbahan gerak d , maka energi yang dikerjakan sebesar dTi ,
persamaan menjadi
dMiidTi 21 atau
d
dMiiTi 21
Untuk operasi arus searah, maka momen gerakd
dMIITd 21 pada keadaan mantap: momen
kontrol cT = momen gerak dT
cd TT
kd
dMII 21
d
dM
K
II 21
Untuk operasi arus bolak balik & sinusoidal
d
dMiiTi 21
Momen gerak rata-rata TT
id dtiiTd
dMdtT
TT
0
21
0
11
tIi m sin11
tIi m sin22
T
mm
T
id dtttIITd
dMdtT
TT
0
21
0
sinsin11
2
0
21
0
sinsin2
11tdttII
d
dMdtT
TT mm
T
id
2
0
21 2coscos2
1
2
1tdtII
d
dMT mmd
rumus: coscossinsin21
21
d
dMIIII
d
dMT mm
mmd cos2
cos22
1
2
1 2121

32
d
dMIIT mm
d cos22
21
d
dMIITd cos21 I1, I2 harga efektif
Pada keadaan keseimbangan cd TT
d
dM
K
IIcos21
Jenis alat ukur elektrodinamik dapat dipakai untuk mengukur:
Arus, namanya Elektrodinamik Ammeter: ac, dc
d
dM
K
I 2
Tegangan, namanya Elektrodinamik Voltmeter: ac, dc
d
dM
K
V 2
Daya, namanya Elektrodinamik Wattmeter
Elektrodinamik Wattmeter
Rangkaian pengganti:
d
dMiiTi 21
tVv sin2 sehingga tR
V
R
vi p sin2
tIi pp sin2
tIic sin2
d
dMtItIT pi sin2sin2
d
dMttIIT pi sinsin2
Momen rata-rata menghasilkan:
kumparan tegangan RLbeban
ip
ic
kumparan arus
Rsuplay
33
T
p
T
id dtttIITd
dMdtT
TT
00
sinsin211
T
pd dttTd
dMIIT
0
2coscos1
d
dM
R
VI
d
dMIIT pd coscos
Pada keadaan keseimbangan cd TT
Pd
dMK
d
dM
RK
VI
1cos
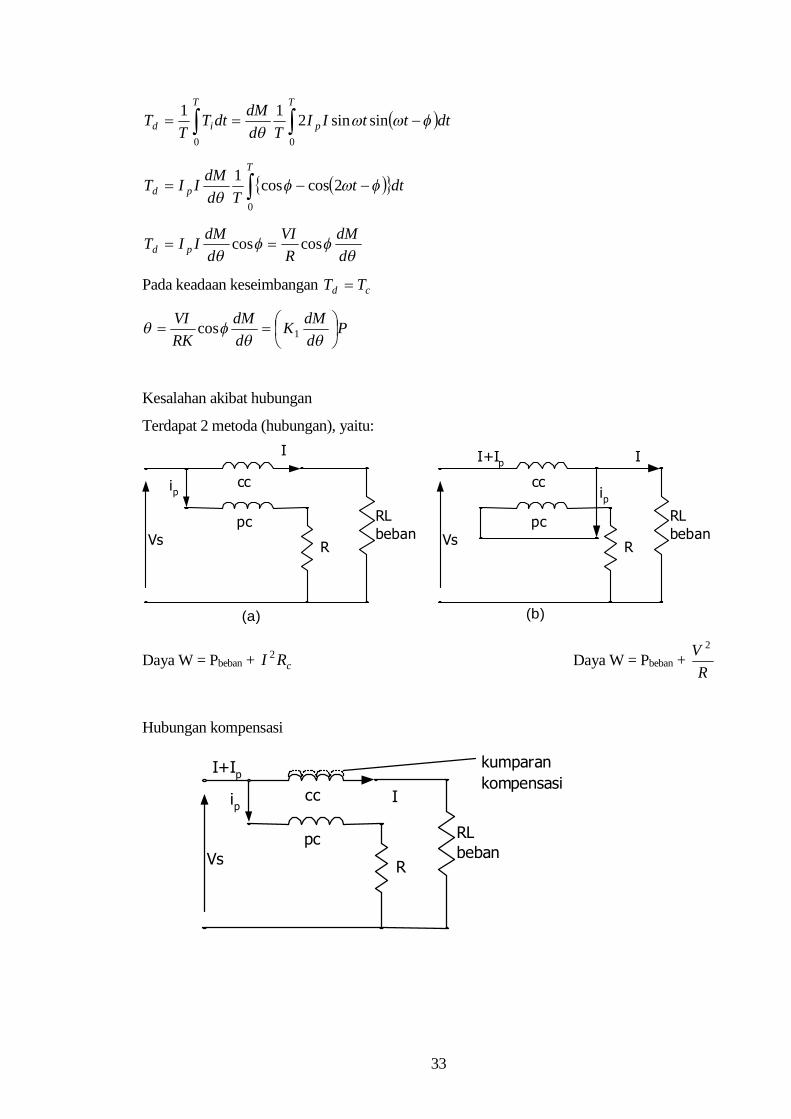
Kesalahan akibat hubungan
Terdapat 2 metoda (hubungan), yaitu:
Daya W = Pbeban + cRI 2 Daya W = Pbeban +R
V 2
Hubungan kompensasi
pc RL
beban
ip
I
cc
RVs
pc RL
beban
ip
I+Ip
cc
RVs
I
(b)(a)
pc RLbeban
ip
Icc
RVs
I+Ip
kumparan
kompensasi
34
Kumparan kompensasi dihubungkan secara seri dengan kmparan tegangan untuk melawan medan
kumparan arus.
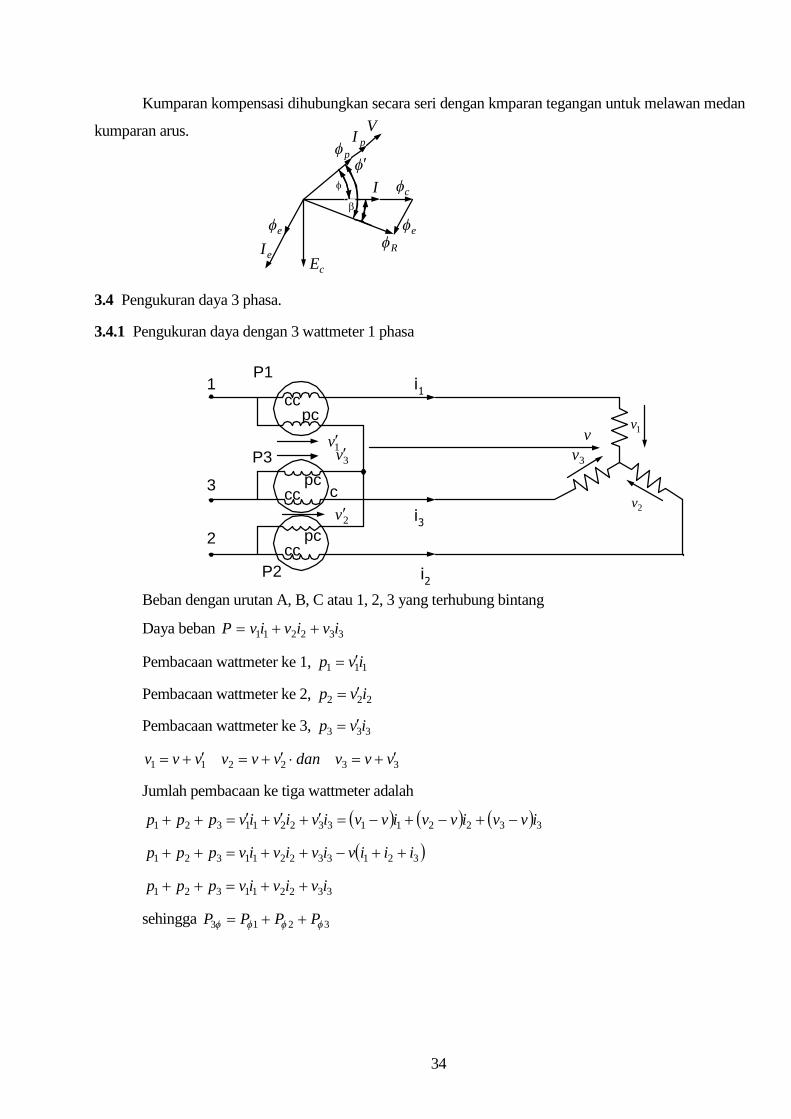
3.4 Pengukuran daya 3 phasa.
3.4.1 Pengukuran daya dengan 3 wattmeter 1 phasa
Beban dengan urutan A, B, C atau 1, 2, 3 yang terhubung bintang
Daya beban 332211 ivivivP
Pembacaan wattmeter ke 1, 111 ivp
Pembacaan wattmeter ke 2, 222 ivp
Pembacaan wattmeter ke 3, 333 ivp
332211 vvvdanvvvvvv
Jumlah pembacaan ke tiga wattmeter adalah
332211332211321 ivvivvivvivivivppp
321332211321 iiivivivivppp
332211321 ivivivppp
sehingga 3213 PPPP
c
ppIV
e
R
I
cE
e
eI
i11P1
3
i2
2
P2
i3
1v
2v
3v
c
v1v
2v
3v
ccpc
ccpc
ccpc
P3
35
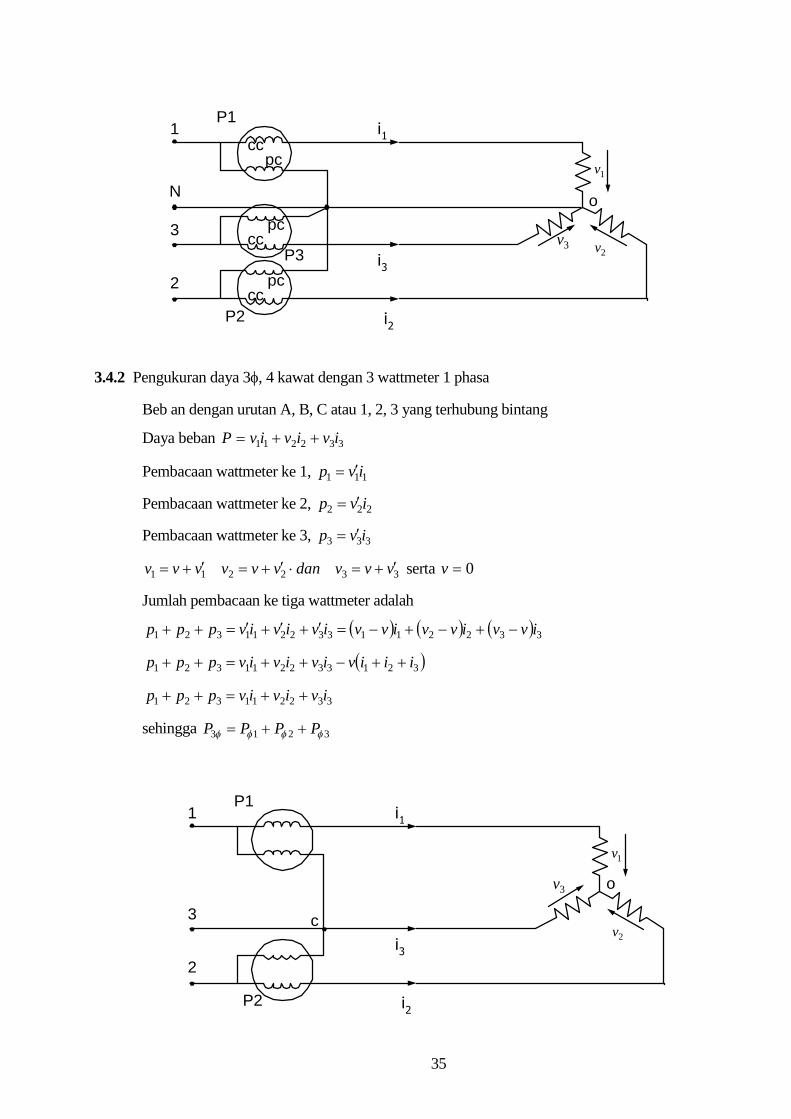
3.4.2 Pengukuran daya 3, 4 kawat dengan 3 wattmeter 1 phasa
Beb an dengan urutan A, B, C atau 1, 2, 3 yang terhubung bintang
Daya beban 332211 ivivivP
Pembacaan wattmeter ke 1, 111 ivp
Pembacaan wattmeter ke 2, 222 ivp
Pembacaan wattmeter ke 3, 333 ivp
332211 vvvdanvvvvvv serta 0v
Jumlah pembacaan ke tiga wattmeter adalah
332211332211321 ivvivvivvivivivppp
321332211321 iiivivivivppp
332211321 ivivivppp
sehingga 3213 PPPP
i11P1
3
i2
2
P2
i3
1v
2v3v
ccpc
ccpc
ccpc
P3
No
i11P1
3
i2
2
P2
i3
1v
2v
3v
c
o
36
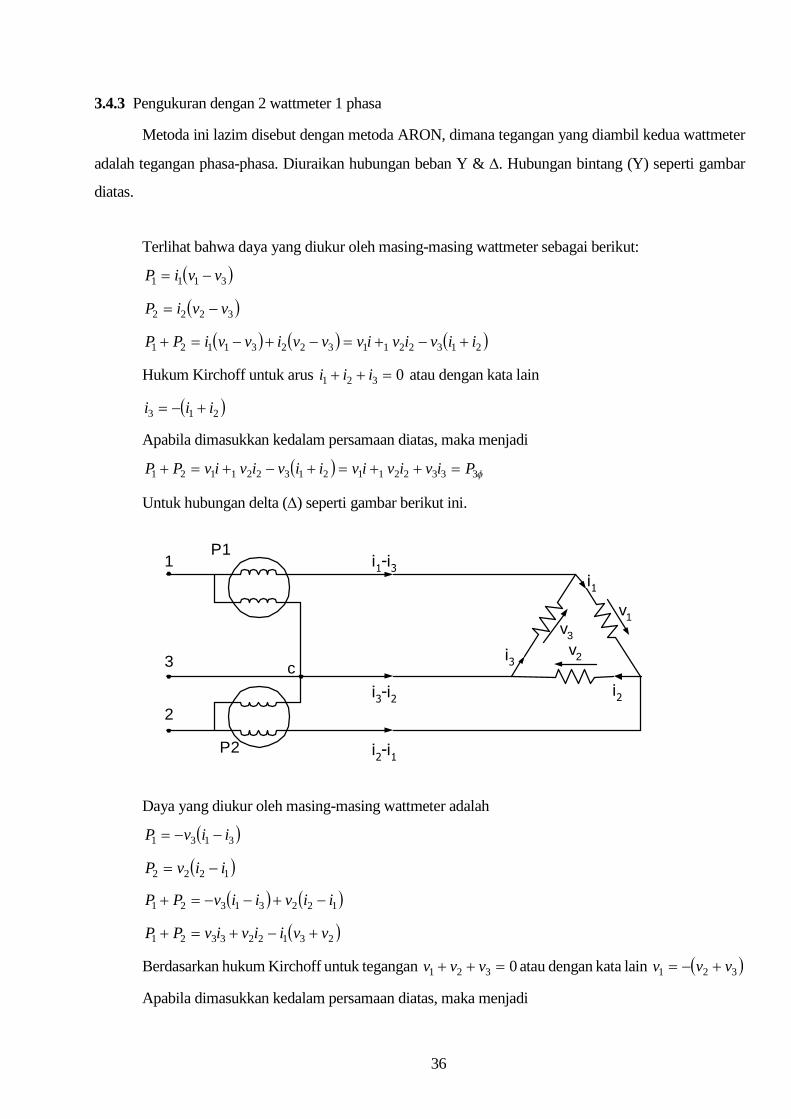
3.4.3 Pengukuran dengan 2 wattmeter 1 phasa
Metoda ini lazim disebut dengan metoda ARON, dimana tegangan yang diambil kedua wattmeter
adalah tegangan phasa-phasa. Diuraikan hubungan beban Y & . Hubungan bintang (Y) seperti gambar
diatas.
Terlihat bahwa daya yang diukur oleh masing-masing wattmeter sebagai berikut:
3111 vviP
3222 vviP
213221132231121 iivivivvvivviPP
Hukum Kirchoff untuk arus 0321 iii atau dengan kata lain
213 iii
Apabila dimasukkan kedalam persamaan diatas, maka menjadi
3332211213221121 PiviviviivivivPP
Untuk hubungan delta () seperti gambar berikut ini.
Daya yang diukur oleh masing-masing wattmeter adalah
3131 iivP
1222 iivP
12231321 iiviivPP
231223321 vviivivPP
Berdasarkan hukum Kirchoff untuk tegangan 0321 vvv atau dengan kata lain 321 vvv
Apabila dimasukkan kedalam persamaan diatas, maka menjadi
i1-i31P1
3
i2-i
1
2
P2
i3-i2
c
v3
v2
v1
i1
i3
i2

37
3332233231223321 PviivivvviivivPP
3.5 Pengaruh cos terhadap pengukuran
Pengukuran dengan cara metoda Aron lebih efisien, karena hanya menggunakan 2 wattmeter 1
phasa. Akan tetapi perlu hati-hati dalam merangkai peralatan, khususnya polaritas. Dengan kesalahan
merangkai memungkinkan terjadi kesalahan pengukuran. Untuk menjelaskan masalah ini semuanya dapat
dilihat pada gambar dibawah ini.
Untuk sistem seimbang tegangan vvvv 321 , tegangan phasa-phasa vvvv 3312312
dan arus IIII 321 , faktor kerja adalah cos .
Berdasarkan diagram vektor diatas dan gambar pengukuran metoda Aron, didapat bahwa wattmeter
P1 mengukur arus I1 dan tegangan V13 dan wattmeter P2 mengukur arus I2 dan tegangan V23. Sedangkan
sudut antara I1 dan V13 adalah 30- dan sudut antara I2 dan V23 adalah 30+, maka:
oIVP 30cos1131
oVIP 30cos31 dan
oIVP 30cos2232
oVIP 30cos32
oo VIVIPP 30cos330cos321
cos321 VIPP
Sehingga daya total cos3213 VIPPP , sedangkan selisih daya
oo VIVIPP 30cos330cos321
sin321 VIPP
Oleh karena itu perbandingan
V1
V2
V23
V13
I3
V3 I
2
I1

38
3
tan
cos3
sin3
21
21
VI
VI
PP
PP
21
213tanPP
PP
21
213arctanPP
PP
Terdapat hal-hal khusus, suhubungan dengan faktor kerja cos , yaitu:
Untuk 1cos atau o0 , maka
oVIP 30cos31
VIVIP oo23
1 030cos3
oVIP 30cos32
VIVIP oo23
2 030cos3
Sehingga daya 3 phasa untuk 1cos adalah VIVIVIPPP 323
23
213
Untuk 5.0cos atau o60 , maka
oVIP 30cos31
VIVIP oo23
1 6030cos3
oVIP 30cos32
06030cos32 ooVIP
Sehingga daya 3 phasa untuk 5.0cos adalah VIVIPPP23
23
213 0
Untuk 0cos atau o90 , maka
oVIP 30cos31
VIVIP oo
2
39030cos31
oVIP 30cos32
VIVIP oo
2
39030cos32
Sehingga daya 3 phasa untuk 0cos adalah 02
3
2
3213 VVPPP
39
Analisa menunjukkan bahwa, harga salah satu wattmeter pada suatu saat akan menunjukkan harga
negatif bila 5.0cos . Karena wattmeter tidak dapat menunjukkan negatif, maka untuk mendapatkan
harga pengukuran dengan membalik polaritas arus atau tegangan (salah satu) dari wattmeter tersebut. Akan
tetapi untuk mendapatkan harga pengukuran daya 3 phasanya, daya yang diukur oleh wattmeter yang
dibalik polaritasnya tersebut harus bernilai negatif. Dengan kata lain untuk 5.0cos harga 3 phasa sama
dengan selisih dari harga 21 PP nya. Oleh karena itu pada pengukuran daya 3 phasa baik yang
menggunakan cara Aron atau dengan wattmeter 3 phasa, perlu diperhatikan polaritas dari arus maupun
tegangannya. Kesalahan dalam menentukan polaritas dalam rangkaian dapat mengakibatkan kesalahan
pengukuran.
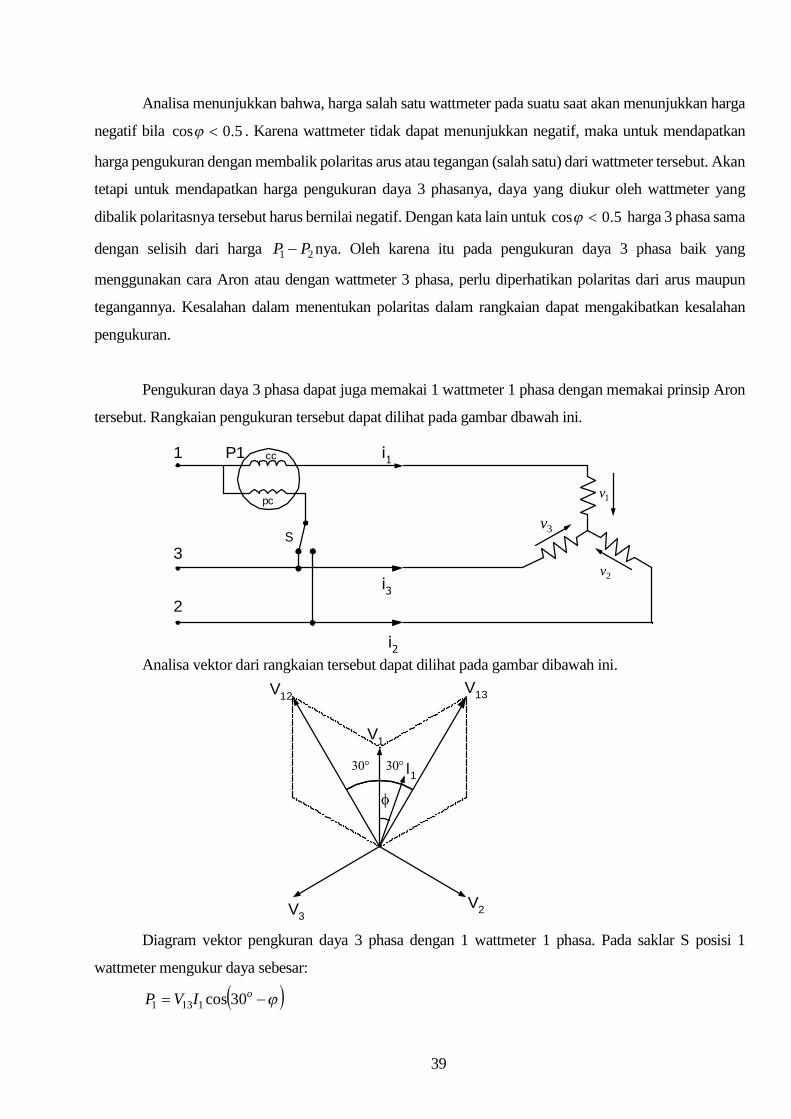
Pengukuran daya 3 phasa dapat juga memakai 1 wattmeter 1 phasa dengan memakai prinsip Aron
tersebut. Rangkaian pengukuran tersebut dapat dilihat pada gambar dbawah ini.
Analisa vektor dari rangkaian tersebut dapat dilihat pada gambar dibawah ini.
Diagram vektor pengkuran daya 3 phasa dengan 1 wattmeter 1 phasa. Pada saklar S posisi 1
wattmeter mengukur daya sebesar:
oIVP 30cos1131
i11 P1
3
i2
2
i3
1v
2v
3v
cc
pc
S
V1
V2
V12
V13
V3
I1

40
oVIP 30cos31 dan
Dengan saklar S pada posisi 2, wattmeter mengukur daya sebesar:
oIVP 30cos2232
oVIP 30cos32
maka:
oo VIVIPP 30cos330cos321
cos3213 VIPPP
3.6 Pengukuran daya semu (VAR)
Pengukuran daya semu (VAR) dapat dilakukan baik untuk 1 phasa maupun 3 phasa dengan VAR
meter atau dengan wattmeter. Pada prinsipnya baik memakai VAR meter atau wattmeter adalah sama,
bedanya terletak pada macam rangkaian dan komponen tambahan yang dipakai pada VAR meter, yaitu
phase shifter.
Pada pegukuran daya semu satu phasa bila dilakukan dengan wattmeter harus ditambahkan
komponen L atau C yang berguna untuk merubah beda sudut phasa sebesar 90.
Penggunaan L atau C tergantung macam bebannya. Bila beban bersifat unduktif (arus terbelakang
terhadap tegangan) maka komponen yang dipakai harus L demikian sebaliknya bila beban kapasitif,
kompoen tambahannya adalah C. Penambahan komponen ini dipasang seri dengan kumparan tegangan
dari wattmeter. Untuk lebih jelasnya dapat dilihat pada gambar berikut ini.
su
mb
er
be
ba
n
L3
R3
L1
R1 R
4C
4
L2
R2
pc
cc
IL
Ip
I
IL
(a) (b)

41
Pengukuran daya semu 3 phasa dapat dilakukan dengan berbagai macam cara, antara lain:
Dengan wattmeter 3 phasa, menggunakan bantuan autotrafo tegangan yang dihubungkan secara
delta terbuka (open delta). Sistem delta terbuka ini berfungsi sebagai phasa shifter (penggeser phasa).
Dalam hal ini perlu juga diperhatikan pengaruh polaritasnya.
Cara lain yang masih memakai penggeser phasa delta terbuka adalah menggunakan prinsip Aron.
Hanya saja tegangan yang diambil untuk kumparan tegangan kedua wattmeternya dari delta terbuka
tersebut, rangkaian lengkapnya dapat dilihat pada gambar dibawah ini.
Pengukuran yang lebih sederhana yaitu dengan menggunakan rangkaian Aron 2 wattmeter. Prinsip
yang dipakai adalah:
Daya semu 1 phasa = sinVI
Daya semu 3 phasa = sin3VI
Dari persamaan perbedaan daya, bahwa:
sin321 VIPP , maka
Daya semu 3 phasa
sin33 VIQ
sin333 VIQ
213 3 PPQ
Pengukuran daya semu 3 phasa dengan 1 wattmeter 1 phasa. Rangkaian seperti gambar dibawah
ini.
57-7%V23
100%V23
115-4%V23
57-7%V21
100%V21
115-4%V21
V
32
V
12
12
3
SU
MB
ER
BE
BA
N
Wattmeter 1
Wattmeter 2
11
5-4
%1
00
%
57
-7%
57-7%
100%
115-4%
ccpc
ccpc
1
2
3
1
2
3
i11
3
i3
2
i2
cccpc
42
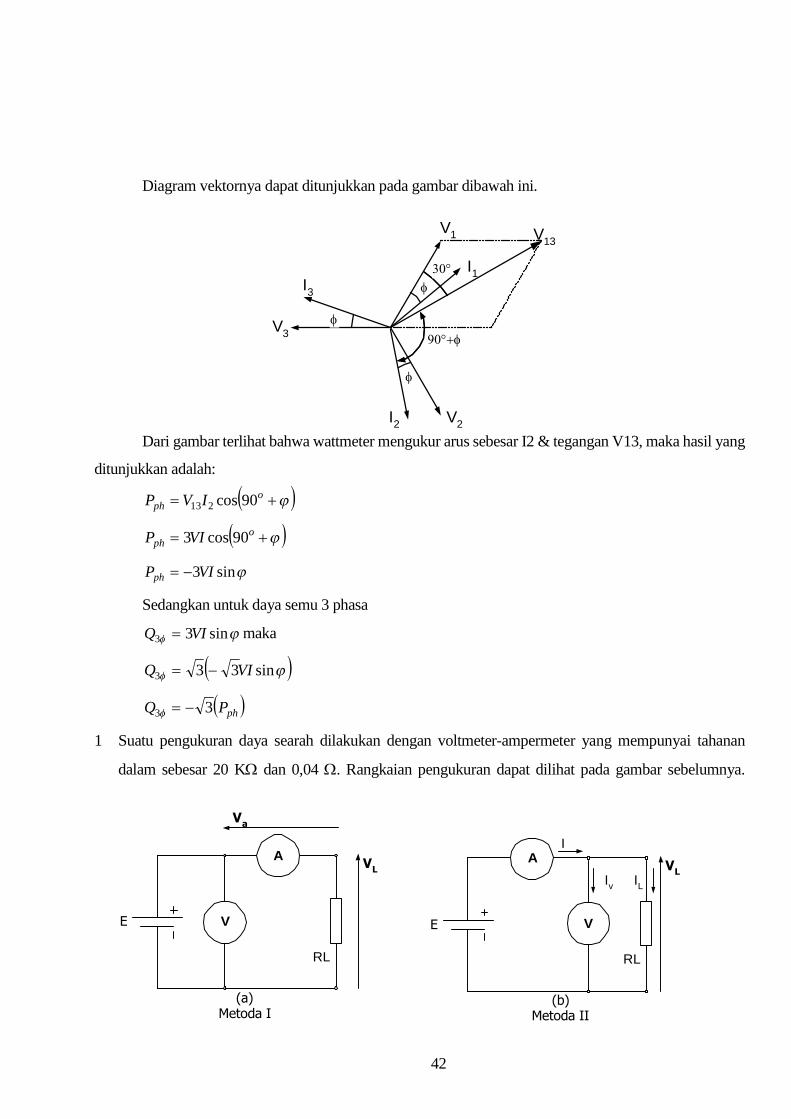
Diagram vektornya dapat ditunjukkan pada gambar dibawah ini.
Dari gambar terlihat bahwa wattmeter mengukur arus sebesar I2 & tegangan V13, maka hasil yang
ditunjukkan adalah:
oph IVP 90cos213
oph VIP 90cos3
sin3VIPph
Sedangkan untuk daya semu 3 phasa
sin33 VIQ maka
sin333 VIQ
phPQ 33
1 Suatu pengukuran daya searah dilakukan dengan voltmeter-ampermeter yang mempunyai tahanan
dalam sebesar 20 K dan 0,04 . Rangkaian pengukuran dapat dilihat pada gambar sebelumnya.
V1
V2
V3
V13
I1
I3
I2
V
A
E
RL
(a)Metoda I
VL
Va
VE
RL
(b)Metoda II
AV
LIL
Iv
I
43
Didapat pada masing-masing rangkaian harga I = 10 A & V = 220 volt. Hitung daya sebenarnya yang
diserap oleh beban
Jawab:
Daya hasil pembacaan pengukuran,
220022010 VIPm watt.
Untuk rangkaian gambar (b),
Daya sebenarnya = Daya pengukuran – rugi-rugi pada voltmeter
VMT
R
VPP
2
000.20
2202200
2
TP
21.12200TP
79,2198TP watt.
Untuk rangkaian gambar (a),
Daya sebenarnya = Daya pengukuran – rugi-rugi pada ampermeter
aMT RIPP 2
04,0102200 2 TP
42200TP
2196TP watt.
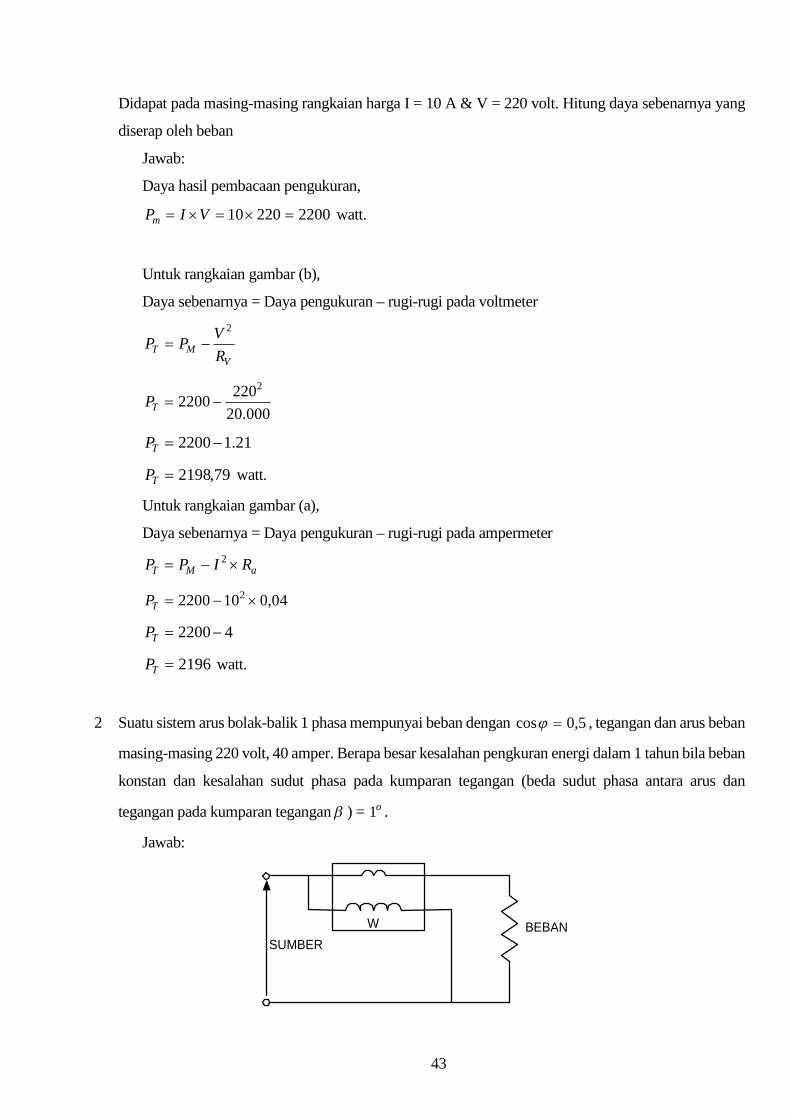
2 Suatu sistem arus bolak-balik 1 phasa mempunyai beban dengan 5,0cos , tegangan dan arus beban
masing-masing 220 volt, 40 amper. Berapa besar kesalahan pengkuran energi dalam 1 tahun bila beban
konstan dan kesalahan sudut phasa pada kumparan tegangan (beda sudut phasa antara arus dan
tegangan pada kumparan tegangan ) = o1 .
Jawab:
W BEBAN
SUMBER

44
Daya yang diukur
cos IVPM watt
5,040220 MP watt
4400MP watt
Energi dalam 1 tahun ( 876024365 jam) adalah
tPE watt-jam
87604400E watt-jam
38544000E watt-jam
544,38E MW-jam
Diketahui dalam rangkaian wattmeter 1 phasa,
pr tahanan kumparan tegangan
pL induktansi kumparan tegangan
R Tahanan seri dengan kumparan tegangan
V tegangan pada kumparan tegangan
pi arus yang mengalir pada kumparan tegangan
beda sudut phasa antara arus dan tegangan pada kumparan tegangan
beda sudut phasa beban (lagging)
Maka:
22pp
p
LRr
Vi
Rr
L
p
p
tan
Makin besar sifat resistivitasnya, maka makin kecil , dan makin besar frekuensi yang diukur,
maka makin besar harga . Daya yang diukur oleh wattmeter sebanding dengan:
cospiIP
cospZ
vIP
cos
cosRr
vIP
p

45
coscosRr
vIP
p
Bila harga induktansi dari kumparan tegangan = nol, maka:
cos
Rr
vIP
p
, dalam keadaan ini wattmeter mengukur harga yang sebenarnya. Dengan
demikian ratio antara hasil sebenarnya dan hasil pengukuran yang disebut sebagai faktor koreksi (fk) adalah
coscos
cos
coscos
cos
Rr
vI
Rr
vI
fk
p
p
Harga sebenarnya = faktor koreksi x harga pengukuran
Harga sebenarnya = fk x harga pengukuran
Harga kesalahan pengukuran dapat dihitung sebagai berikut:
harga pengukuran – harga sebenarnya
harga pengukuran - fk x harga pengukuran
fk1 harga pengukuran
coscos
cos1 harga pengukuran
coscos
cossinharga pengukuran
coscos
cosfk
tantan1
tan1 2
fk
Untuk sangat kecil, maka nilai 1tan2 , maka
tantan1
1
fk
Harga pengukuran = tantan1 harga sebenarnya
Harga kesalahan tantan harga sebenarnya
Harga sebenarnya = cosVI , maka
costantan VI
tansin VI

46
5,0cos , maka o60 , sedangkan diketahui o1
sehingga faktor koreksi dapat dicari yang besarnya,
coscos
cosfk
ooo
o
fk160cos1cos
60cos
ooo
o
fk160cos1cos
60cos
0.5150380.999848
5,0
fk
0.97095fk (atau faktor koreksi sebesar 97%), oleh karena itu kesalahannya
02905.0 (atau 2.905%)
Jadi kesalahan pengukuran energi selama 1 tahun adalah
544.3802905.0 EE MW-Jam
156.1E KW-Jam (=KWH)
3 Suatu pengukuran daya motor 3 phasa dengan cara Aron didapat bahwa pembacaan pada wattmeter ke
1 sebesar 30 KW, wattmeter ke 2 sebesar 10 KW. Bila kedua wattmeter menunjukkan harga positif,
berapa daya dan cos beban. Bila salah satu wattmeter dihubungkan dengan polaritas terbalik berapa
daya dan cos beban.
Jawab:
301 P KW, 102 P KW
401030213 PPP KW
20103021 PP KW
i11P1
3
i2
2
P2
i3
1v
2v
3v
c
o
47
21
213arctanPP
PP
40
203arctan
o89.40
756.089.40coscos o
Bila salah satu wattmeter ( 2P ) berpolaritas terbalik, maka:
301 P KW, 102 P KW
201030213 PPP KW
40103021 PP KW
21
213arctanPP
PP
20
403arctan
o89.73
28.089.73coscos o
4 Suatu pengukuran dari beban 3 phasa 220/380V seimbang seperti pada gambar dibawah ini: Pada saat
K pada posisi 1, wattmeter menunjukkan 15000 watt, sedangkan bila K pada posisi 2 wattmeter
menunjukkan 20000 watt.
Berapa sudut phasa beban?
Berapa arus beban?
SU
MB
ER
BE
BA
N
Wattmeter
ccpc
R
S
T
1
2
3
K1
2

48
Jawab:
Untuk lebih jelasnya dapat dilihat pada diagram vektor dibawah ini:
oRRT IVP 30cos1
sin30sincos30cos1oo
RRT IVP
sincos321
21
1 RRT IVP
oRST IVP 90cos2
sin2 RST IVP
oRST
oRRT
IV
IV
P
P
90cos
30cos
2
1
sin
sincos321
21
2
1
RST
RRT
IV
IV
P
P ,
Bila VVVV TRSTRS , maka:
20000
15000cot3
21
21
2
1 gIV
IV
P
P
RST
RRT
75.0cot321
21 g
288.02
1
3
75.02cot
g
46.3288.0
1tan
VR
VS
VST
VRT
IT
VT IS
IR
VT
49
o89.7346.3arctan
20000sin90cos2 RSTo
RST IVIVP
78.5489.73sin380
20000
sin
20000
oST
RV
I
Amper.
Suatu pengukuran daya 1 phasa dengan 3 ampermeter didapat AI 251 ; AI 72 ; ;203 AI
R=30 ohm. Hitung cosdan daya pemakai
Jawab:
Dari persamaan (3.24) & (3.26) diperoleh:
32
23
22
21
2cos
II
III
628.02072
20725cos
222
xx
watt
RIIIP 2640
2
3020725
2
22223
22
21
1










![[ELS] Methods and Instructional Media Health Promotion... - Dr. Denny Anggoro - 3 April 2012](https://static.fdokumen.com/doc/165x107/55cf9d80550346d033ade6d4/els-methods-and-instructional-media-health-promotion-dr-denny-anggoro.jpg)






