175874934 mekanika-klasik-peter-soedojo-pdf
159
6 \), *---r * rre- 51-q1# \ m ffi .\\ \, \\ i\\ \'_ \ I lr\ ! AKAAN ]R .i:-- ' . \b\\ \-\ \ \. .. &.- \.\ \ \\ \ \:\ \ :r:iw $\ . .. .:!l \!1 . t.i 'I{. ; I,T Dr ",. &" |&,,.- Peier Srtudojrr, . Halso:'r B "$c" A 6e?' {. ;*".'re@*p+ ii j|tll|lB. ffi {:ffir;i;..-.i." Iraffiw, @-'-t Penerhlt : 1""tr88K,'!'Y a ff -,-,*** * - -;" {-a {}"r AY k'12'{ *s.
-
Upload
abdul-banyal -
Category
Documents
-
view
421 -
download
7
Transcript of 175874934 mekanika-klasik-peter-soedojo-pdf
6\), *---r
* rre-51-q1#
\
m
ffi
.\\\,\\
i\\\'_\
I
lr\
!
AKAAN]R
.i:--' . \b\\\-\ \ \... &.-
\.\ \\\ \\:\ \
:r:iw$\. .. .:!l
\!1. t.i'I{.; I,TDr
",. &" |&,,.-
Peier Srtudojrr,. Halso:'r
B"$c"
A
6e?' {. ;*".'re@*p+ iij|tll|lB. ffi {:ffir;i;..-.i." Iraffiw, @-'-t
Penerhlt : 1""tr88K,'!'Y
a
ff -,-,*** * -
-;" {-a {}"r AY k'12'{ *s.
IT4ILIKPERpr rgT46AAN -tnenon
l'" to'n r,M u rr
Nomor , 6'4 ,87 tpDl f ll,,gy!1:'^ ' :il,tss j
Yi
7.-'****
if,
I
IIf
MEKANIKA KLASIKoleh :
Dr. Peter Soedojo, B.Sc.Drs. HarsojoUniuersitas Godjah MadaYogyakarta.
Edisi PertamaCetakan Pertama, 7985
A 1985, Liberty Yoggakarta.Dilorang mereproduksi isi buku ini baik sebagian moupunseluruhnya dalam bentuk dan atau alason apapun jugo,tanpa izin tertutis dari penerbit.
Penerbit :
LIBERTY YOGYAKARTAJayengprawiran 21, 23,Yogyokarta.
Distributor :
. Toko Buku BINA USAHAJalon Colombo 2-A, Telp. (0274) 86803,Yogyakorta.
Toko Buku DOMINANJolan Jagalan 4, Telp. (0274) 889A4Yogyakorta
Toko Buku MULIAJalon Gandasuli No. 5. Telp. (021) 354553Jakorta Pusot
Toko Buku BINA IISAHAJalan Kramat Raya 78 (Senen)Telp. (021) 341117, Jakarto Pusat
H. FRANKIMd/a Wisma Liberty,Jl. PeJepah Hijou 3 TL 2 No. 27Kelapo Gading Permai 2,Jakarta Utara.
Ftr
i4
?-a,
I
I
111
, KATA PENGANTAR
sesuai dengan jufu.rlya,. buku ini nemuat dasar-dasar pemikiran dalamrnekanika klasik yang teoi-h aitltit-beratkan pada segi analittk serta kon-sepsional, bukannya pada segi ketrampilan tetnis peilecahrn-ro.r.Itbkanika klasik tidak hanya mencerminkan keterbatasan mekanika titikmaterinya Newton dalam memecahi<an masalah sistem mekanis yang rumit, te-tapi juga memberikan.dasar yang fundamental dalarn pengembangan fisika mo-dern' Maka buku ini dihar"pi.rn"r"rperluas cakrawala fisika maupun mekani-ka bagi para mahasiswa iurlsan risika ,"up"n urgi prr" guru fisika di Se_kolah Menengah Atas.Akhirul kata, semoga
rikan sumbangan yarig beraitidi Indonesia.
buku sesederhana ini bermanfaat serta membe_kepada khasanah pengajaran ilmu pengetahuan
segala kekutangan, kekhilafan, dan kelemahan btrku ini, kiranya meru-P"f'" tantangan bagi- para penulis iainnya di kemudian hari untuk menutisbuku semacam yang ieUitr memaclai dan rebih ,urfr""".
l_,
Penulis,
-'t
., -i*re<\ilE;*aBiaj -:t:1
iv
DAFTAR ISI
PENDAHULUAN
I. MEKAiIIKA TITIK l.,tAlERI
Hukur kekekalan tenaga mekanikGerakan di dalan sistem koordinat yang berputar .
Gerakan di permukaan bumiBandul Foucolt
5. Gaya sentral6. Hukum-hukum
II. MEKA}'IIKA SISTEM
1. Titik berat
1.)3.4.
Halaman
53
55
1
3
359
101520
29
29303132343640
555557596769707t76
1Keppler
MATERI
2. Hnkun kekekalan inpuls ..... ..,.. i........3. Tenaga kinetik sisten materi ...... .......4, Iqpuls putar sistem nateri .....5. Momen gaya sistem materi ... ,...6. Tumbukan t,.., r....7. Hamburan ..8. Massa tereduksi t... .. o...
III . MEKANIKA SISTEM Ir,lEKAl'lIS ...,,.,.,. ,,...,...,,....,,1. Pendahuluan .,2, Azas usaha semu ,....3. Azas DrAlembert -u_r_,,.. .. i.. .. ... ,.4. Persamaan tagrange ...,,
1
a
5. Azas Hamilton .
6. Penjabaran azas Hamilton dari azas DrAlenbert7, Penjabaran persamaan tagrange dari azas Hanilton .....'8. Ruang fase dan persamaan Hamilton9. Koordinat siklik dan cara Routh
10. Penjabaran persamaan Hamllton dari azas variasi Hamil-ton .
tt
!
11.t2.L3.t4.15.16.L7.18.
Transformasi kanonik dan perisanaanAzas action terkecil (Least action
Hamil ton-Jacobi 81919498
to2103104
principle)Variabel action dan variabel sudutInvariansi integral Poincare ...Kurung tagrange (Lagrange bracket) ...HIXf I::i:'. :::::::.::::::1. :: : : : : : : : : : : : : : : : : : : : : :Teorema Liouville
'a
IV. MEKANIKA BENDA IEGAR
1. Pendahuluan2. Transformasi orthogonal .....3, Teorema Euler ... r. ..,,. .... t4. Sudut-sudut Euler .... !5. Pararpter Cayley-Klein . ....,6. Rotasi kecil
109
113
113113118t2tt24130
7.8.9. Tenaga kinetik rotasi
10. Persamaan gerak Euler11. Persamaan Euler dengan
Impuls putar henda tegar dan tensor enersiaElipsoida momental (Elipsoida. inersial)
Halanan
133136138139145148
sudut-sudut Euler
t:
12. Gerakan pusingan i
_/
\
++
PENDAHULUAN
Ilmu pengetahuan alam yang paling primitif ialah mekanika, yakni ilmuyang membahas tentang gerakan. Demikianlah makamekanikamenjadi dasar ilmupengetahuan alam unumnya dan ilmu fisika khususnya.Pada hakekatnya ilmu mekanika boleh dikatakan dinulai sejak Aristoteles(384 s.M. - 322 s.M.) memikirkan gerakan-gerakan dengan bumi dianggap te-tap tidak bergerak. Akan tetapi pemmusan mekanika baru dikemukakan lamakemudian oleh lsaac Newton (1,642 .- 1727) di mana ia mengemukakan konsep ga-ya dan massa dalam hubungannya dehgan percepatan. Kecuali itu Newton jugamerumuskan gaya gravitasi dari hukum-hukum yang dikemukakan oleh JohannesKeppLer (1571 - 1630); Keppler rnengemukakan hukun-hukumnya tentang gerakanplanet-planet berdasarkan data-data pengamatan Tycho Brahe (1546-1601) gu-runya.Sampai sejauh itu Newton hanya merumuskan mekanika untuk titik materi. Lln-tuk sistem mel<anika umumnya, yang lebih rumit, mekanikanya Newton kurangatau bahkan tidak berdaya sarna sekali. Maka muncullah kemudian pengembang-an mekanika lebih lanjut dari karya tokoh-tokoh seperti Johan Bernoulli(1667 - I74S), Jean Le Ron D'Alembert (1717 - 1783), Josenh [,ouis Lagrange(1736 - 1813), William Rorvan Hamilton (1805 - 1865) dan lain-1ain; -teori-teori mekanika umum yang dikembangkan oleh tokoh-tokoh tersebut dikenal se-bagai mekanika klasik. Mekanika klasik ini memang terlalu berkepanjanganapabila diterapkan untuk memecahkan masaalah-masaalah mekanika yang seder-hana" Akan tetapi di lain pihak, mekanika klasik ternyata kemudian menja-di dasar mekanika modern seperti mekanika statistik, mekanika gelonbang,mekanika kwantum, teori medan dan lain sebagainya dalam fisika modern.Dengan timbulnya teori relativitas yang dittmtaskan oleh Albert Einstein(1879 - 1955), untuk titik materi yang bergerak dengan sangat cepat, nassanya dipandang tidak tetap dan timbullah mekanika relativistik.
Unsur-unsur mekanika ialah ruang, waktu dan materi. Kalaupembicaraarl-nya hanya menyangkut jenis-jenis gerakan, maka hanya unsur-unsur ruang danwaktu saja yang terlibatkan; bagian mekanika yang membicarakan tentang je-nis gerakan demikian eli.sebut kinematika" Kalau pembahasannya yang menyang-kut penyebab gerakan rnaka kecuali unsur ruang dan waktu unsur materi, ymgdinyatakan oleh massadl'a jr.rga terlibat; bagian mekanika yang membahas haldemikian disebut dinamika. Adapun statika ialah bagian mekanika yang mem-bahas hal kesetimbangan.Kcnsep kinematika yang berhubungan dengan ruang ialah tempat yang dapat diinyatakan dengan koordinat-koordinat di dalam suatu sistem koordj-nat yarrgdipilih, sedangk,ln yang berhubungan dengan rtrang dan waktu ialah kecepatandan percepatan,Kecepatan didef:ni-sikan sebagai jarak yang ditempuh per satuan waktu atautepatnya diferensial koordinat terhadap waktu, sedangkan percepatan adalahpenambalran kecepatan per satuan waktu atau tepatnya diferensial kecepatanterhadap waktu.thtuk memudahkan anali-sa, tempat titik materi lazimnya dinyatakan denganvektor koordinat r misalnya.
I
2
Vektor koordinat ini adalah vektor yang pangkalnya di pusat sistem koordi-nat dan ujtmgnya di tempat titik materi berada. Dengan demikian kecepatandidefinisikan sebagai v = dr/4t dan percepatan didefisinisikan sebagai a =dv / dt - d(*' / dt) /-at : d'r / dt'"Jelaslah bahwa dimensi kecepatan adalah dimensi panjang [1] misatnya diba-gi dimensi waktu It] misalnya, sehingga satuanlya misalnya meter/detik dandimensi percepatan adalah dimensi kecepatan [vJ aiUagi dimensi waktu It]yakni [1] dibagi It]2 sehingga satuannya misalnya meter/detik'.
Ukuran banyaknya gerakan ditinjau dari usaha yang diperlukan untukme-nimbulkan atau mengubah gerakan adalah sebanding dengan ukuran kwantitatifmateri yaAg bergerak" Maka dalam dinamika timbul konsep impuls atau mombn-
tun yang didefinisikan sebagai massa kali kecepatan. JelasIah bahwa dimen-si impuis adalah dimensi massa [n] misalnya kali dinensi kecepatan [v]yak-ni [*l [v] = ['n] [1] / lt7.Adapnn apa yang menyebabkan gerakan atau lebih umum yang mengubah banyak-nya gerakan, disebut gaya. Gaya didefinisikan sebagai perubahan impulsper satuan waktu atau tepatnya diferensial impuls terhadao waktu yaknid(m v) / dt. Hal ini dikemukakan oleh Isaac Newton.
Dalam mekanika di samping besaran-besaran kecepatan, perceDatan, im-pu1s, dan gaya, dikenal pula besaran-besaran tenaga kinetik, tenaga poten-sial, usaha, dan daya. Namun bagaimanapun dimensi besaran-besaran tersebutselaiu dapat dinyatakan seLragai fungsi dimensi ketiga unsur mekanika tt][t] dan [m1.Dengan dernikian setiap besaran mekanika selalu dapat dinyatakan sebagaifungsi 3 besaran mekanika lain yang dipilih.Ilnu fisika boleh dikatakan pengembangan lebih lanjut dari pada mekanikadi mana unsur-unsurnya kecuali unsur-unsur mekanika, ruang, waktu da: mas-sB, juga misalnya suhu dalam ilmu panas, kuat penerangan dalam ilmu optik,keras bunyi dalam ilmu suara, dan arus listrik dalam elektromagnetika. Ja-di kalau un-sur-unsur mekanika tidak lebih dari 3 buah, maka unsur-tmsur fi-sika tidak lebih dari 7 buah di mana di dalamnya termasuk ketiga unsur-un-sur mekanika..
Dari uraian di bab pendahuluan ini, jelaslah bahwa mekanika klasik k:-cuali merupakan mekanika umum selengkapnya, juga mendasari pengertian po-kok bagi mekanika modern khususnya dan ilmu fisika nodern ulnumnya.
ttI{.
I$
*
l+,ql
lr!!
\
1
tt
t
.
t
I
I
\
1.
I. IEKANIKA TiTIK I,IATERI
Hukum_Kekelan Tenaga Mekanik
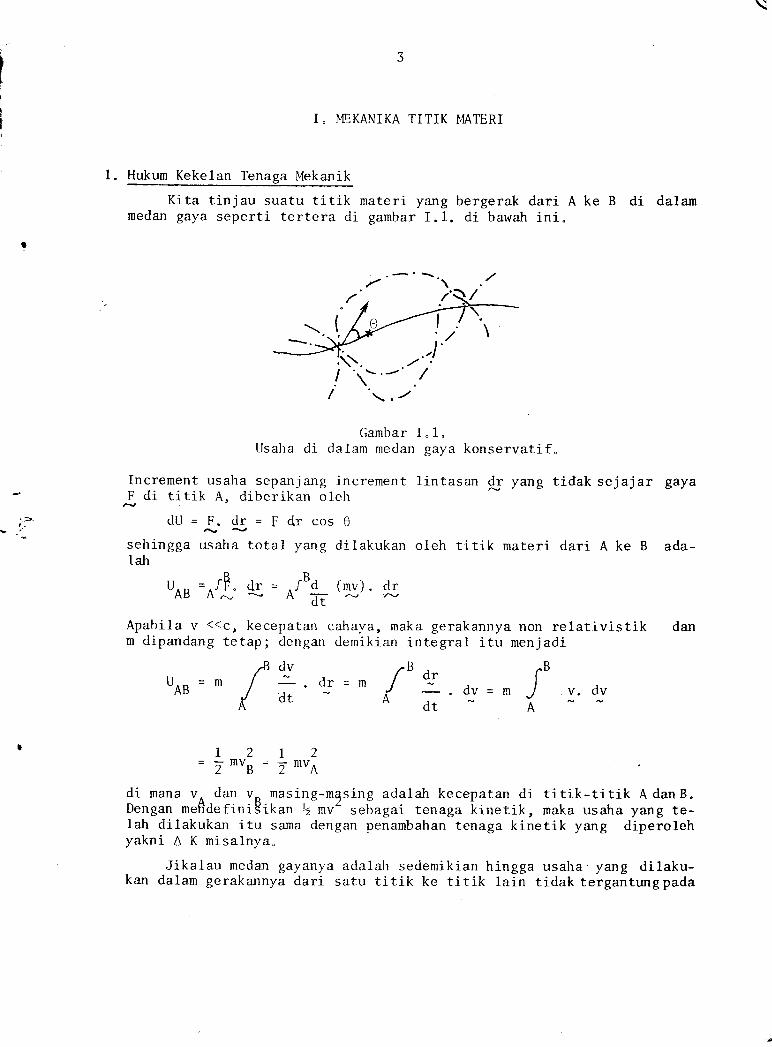
Kita tinjau suatu titik materimedan gaya seperti tertera di gambar
yang bergerak dariI.L. di bawah ini.
A ke B di dalan
I
-.>
Gambar I. 1.Usaha di dalam nedan gaya konservatif"
Increment usaha sepanjang increment lintasan dr yang tidak sejajar gayaj di titik A, diberikan olel.r
dU=1.i5=Fdrcos0sehingga usaha total yang dilakukan oleh titik materi dari A ke B ada-1ah
uo, =ot. * = or't (TJ) . gApabila v ((c, kecepatan cahaya, maka gerakannyam dipandang tetap; dengan demikian integral itu
UAB=*dv
dtfB a,
Ad. *=*
non relativistik danmenj adi
^B{
J v.dvA
L2t2= 7*rB - 7mvA
di mana vn dan vo masing-m4sing adalah kecepatan di titik-titik A dan B.Dengan meftdefiniBikan \ mv' sebagai tenaga kinetik, rnaka usaha yang te-Iah dilakukan itu sama dengan penambahan tenaga kinetik yang diperolehyakni A K misalnya.
Jikalau medan gayanya adalalr sedemikian hingga usaha' yang dilaku-kan dalam gerakannya dari satu titik ke titik lain tidak tergantungpada
4
lintasannya melainkan hanya tergantung pada letak kedua titik itu, makadi setiap titik dapat dikaitkan suatu besaran skalar V misalnya yang se-demikian hingga usaha itu sama dengan perubahan I'rarga V tersebut yakniA V = V - V-^Titik *At"titsyang telah melakukan usaha dapat dikatakan telah berkurangpotensinya untuk melakukan usaha lebih lanjut; maka V 1alu disebut te-naga potensial.Jadi untuk medan gaya yang demikian berlaku hubungan
U--AV=AKyang berarti pula
V+K=tetapatau conserved; medan gaya yang menyebabkan berlakunya hubungan di atasdisebut medan gaya konservatif.Jadi di dalam medan gaya yang konservatif, tenaga mekanik yaitu jurnlahtenaga potensial dan tenaga kinetik, adalah tetap. Pernyataan ini dike-na1 sebagai hukum kekekalan tenaga mekanik.
Jelaslah bahwa di dalam medan gaya konservatiflintasan tertutup yakni sepanjang liniasan dari suatutitik itu lagi, adalah no1 sebab misalnya titik itu iatentu AU = VO - VL = 0.
Dalam elektromagneti-ka kita kenal rumus curl H , j yrLni usaha oleh me-dan magnet H sekeliling lintasan tertutup sama dengan _jumlah arus 1is-trik i yang dlcakup lintasan ittt.Medan gaya demikian sudah tentu tidak konservatif dan karena usaha se-keliling lintasan adalah tertentu, maka medan gaya demikian disebut me-dan gaya rotasional"
Selanj utnya dari hubungan-hubungan
dU = F" dr = F dx + F dy + F dz_-:xy,z
dv= 3V dx+'uor* { dzDx Dy Dz
serta mengingat dU = - dV di atas, maka
F =-DV,p=- Du, F =- 3V*a*YDyzDz
atau secara singkat, menurutkan kalkulus. vektor,
, usaha sepanjangtitik kembali ke1ah A maka sudah
t\a*
l.
P=-VVatauF=Jadi untuk medan gayagradian potensial"
Seandainya dalamhukum kekekalan tenaga
- grad V (1)
yang konservatif, gaya dapat dinyatakan sebagai
gerakannya, titik materi mengalami gesekan, makamekanik tidak lagi berlaku, sebab ada bagian
\
i
l '.al::r
tenaga mekanik yang terdesipasi menjadi panas sehingga tenaga kine-tik yang diperolel"r tidak lagi sebanyak, melainkan lebih sedikit daripa-da, berkurangnya tenaga potensial.Percobaan menunjukkan bahwa banyaknya panas yang timbul karena adanyagesekan selalusebanding dengan tenaga mekanik yangterdisipasi. Jadi pa-nas dapat dipandang sebagai bentuk tenaga dan tenaga total terdiri atastenaga mekanik dan tenaga panas. Jadi bagaimanapun juga tenaga total se-lalu tetap atau keka1" Pernyataan demikian dikenal sebagai hukum keke-kalan tenaga" Dalam Termodinamika hukum kekekalan tenaga ini terumuskanpula sebagai hukum termodinamika ke I.
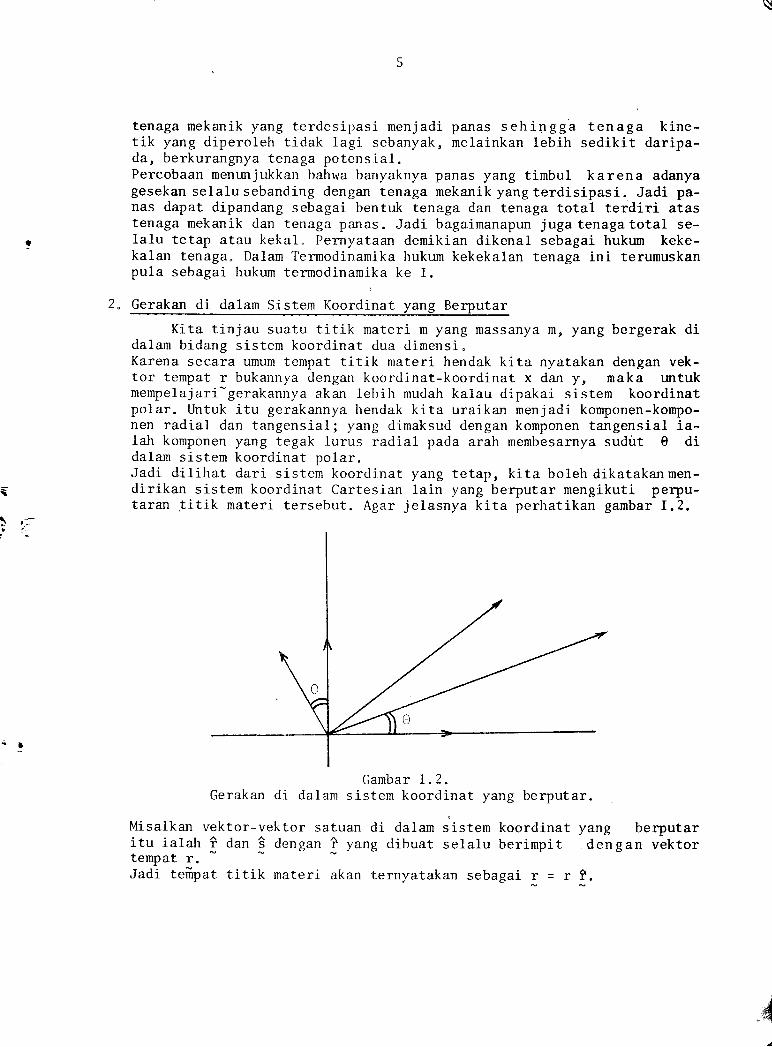
2" Gerakan di dalam Sistem Koordinat yang Berputar
Kita tinjau suatu titik materi m yang massanya m, yang bergerak didalam bidang sistem koordinat dua dimensi
"Karena secara umum tempat titik materi hendak kita nyatakan dengan vek-tor tempat r bukannya dengan koordinat-koordinat x dan y, maka untukmempelajari-gerakannya akan lebih mudah kalau dipakai sistem koordinatpolar. Untuk itu gerakannya hendak kita uraikan menjadi komponen-kompo-nen radial dan tangensial; yang dimaksud dengan komponen tangensial ia-lah komponen yang tegak lurus radial pada arah rnembesarnya sudut 0 didalam sistem koordinat po1ar.Jadi d.ilihat dari sistem koordinat yang tetap, kita boleh dikatakanmen-dirikan sistem koordinat Cartesian lain yang berputar mengikuti perpu-taran .titik materi tersebut. Agar jelasnya kita perhatikan gambar I.2.
Gambar I.2.Gerakan di dalam sistem koordinat yang berputar.
Misalkan vektor-vektor satuan di dalam sistem koordinat yang berputaritu ialah ? dan G dengan ? yang dibuat se1a1u berimpit dengan vektortempat r. -Jadi teilpat titik materi akan ternyatakan sebagai r = r l.
't
d
6
Demikianlah maka kita jabarkan rumus-rumus $ecepatan dan percepatan se-bagai berikut. untuk singkatnya kita tulis *- dengan titik di atasnya,
dr dt
dtMaka kecepatan dan percepatannya diberikan oleh
, r=':*'ra'aaAA' r = r 3 * r r * I r * rr
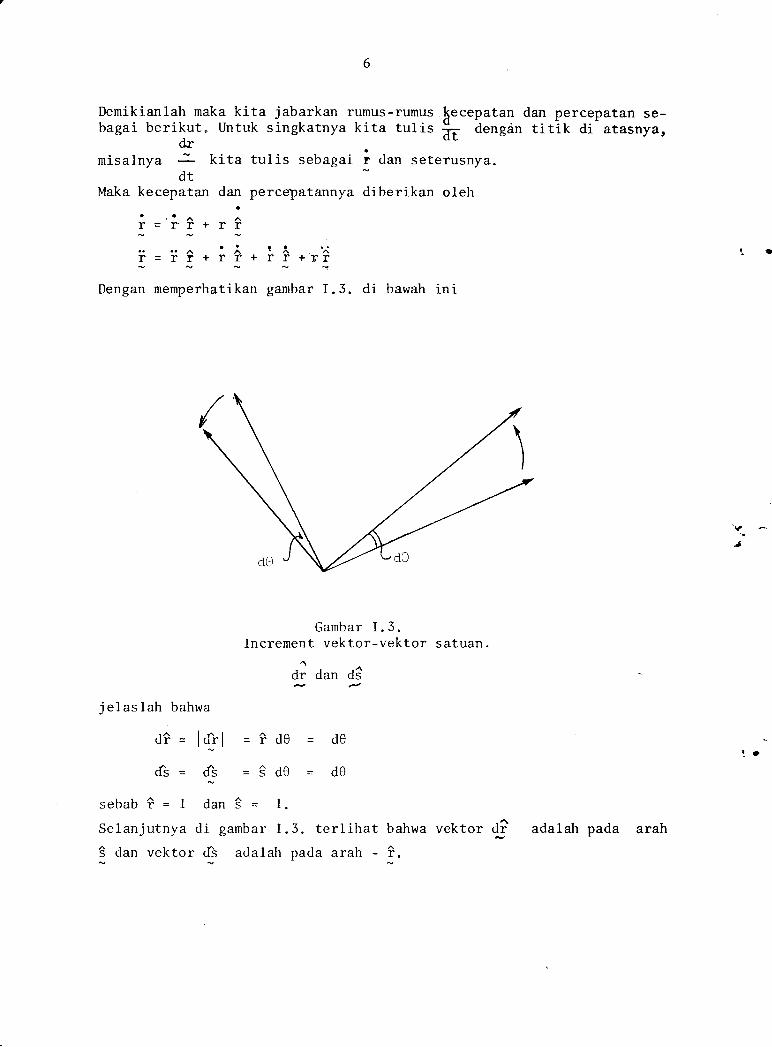
Dengan memperhatikan ganbar I.3. di bawah ini
Gambar I. 3.Increment vektor-vektor satuan.
dr dan d3
J
jelaslah bahwa
d? = l+lds=ds
sebab ? = 1 dan 3 - 1.
Selanjutnya di gambar I.3. terlihat bahwa vektor3 dan vektor d3 adalah pada arah - ?.
=?d0 =
=sdU=
d0
d0
di adalah pada arah
Jadi kita dapatkan
q=S d0dan*=-tsehingga selanjutnya
! =c6=6cd", 3=
3 =63-6'3ut)3 =-0?- 0-3
Dengan demikian persanaan-persamaan urntuk kecepatan dan percepatannyamenj adi
Dengan menuliskan 0
d0
. . lt+ (20r + 0r)
ari persamaan (
2^m0J rr+ zm
a
hukun Newton ke
tA
1*ruors'
(2)
(3)
II. menjadi
(4)
(s)
-r6=-6f
+0r3.)o-r)?
=rrI
ot I = rrI = (I- s
3)
[drf=*i=rni?-
(f
Untuk titik materi yang bergerak berputar dengan kecepatan sudut w yangtetap, sudah tentu o = 0 dan r = 0, sehingga gaya yang membuatnya ber-putar melingkar beraturan denikian adalah
2nP=-m(rJfrGaya ini adalal'r pada arah radial menuju ke pusat dan dikenal sebagai ga-ya sentripetal.Kalau titik materi tersebut kecuali bergerak melingkar dengan kecepatansudut tl) yang tetap juga bergerak secara radial dengan kecepatan v yangtetap, maka gaya yang rnenggerakkannya demikian diberikan oleh.
)fi=-ru-r! + 2mov3. (6)
Suku kedua ruas kanan persamaan (6) adalah pada arah tegak lurus arahradial dan disebvt gaya koriolis. Gaya koriolis dernikian nisalnya yangdialami oleh angin di permukaan bumi yang bergerak dari daerah sedangke daerah katulrstiwa; gaya koriolis pada angin ini disebabkan oleh ro-tasi bumi.
Marilah kita.perhatikan persamaan (2); suku pertana ruas kananper-sanaan itu yaitu r f adalah kecepatan pada arah radial dilihat dari sis-tem koordinat yang Eerputar, yakni u* rnisalnya. Dernikianlah pula ' sukupertama ruas kanan persanaan (3) yaitu i ? adalah percepatan radial di-lihat dari sistem koordinat yang berputar, yakni a* misalnya.
V
8
Tetapi sebenarnya vektor kecepatan dan vektor percepatan tidaklah ter-gantung pada letak titik pusat sistem koordinat. Jadi terhadap senba-rang titik pusat sistem koordinat yang manapur di bidang sistem koordi-nat yang berputar itu, titik materi m tampak bergerak dengan kecepat.an y* dan percepatan 4*,Jadi dengan menuliskan r ? dengan v* dan i ! dengan a* dalam persanaan(3) kita dapatkan hubungan'antara kecepatan dan percepatan di sistenko-ordinat tetap dengan yang di sistem koordinat yang berputar.Dengan nendefinisikan vektor rotasi ro sebagai vektor yang arahnya samadengan arah ? x 3 yaknl- pada arah bergerak maju atau nundurnya sekrupyang diputar-menlikuti perputaian sistem koordinat yang berputar, makivektor 3 adalah pada arah g x I, sehingga persamaan (2) dan persamaan(3) di a?as dapat ditrtirk"n-sebigai p"rllrrrn vektor ieiengtairnya yangmenghubungkan kecepatan dan percepatan di kedua sistem koordinat, dalambentuk
=v*+ (7)
l
:_ tD
r
r
0txr
=a*+2uxv*+(rjxr+oJ
Kecepatan v* dan percepatan a*an transport.Persamaan (7) dan persamaan (8) tak lain menyatakan hubungan antara ke-cepatan dan percepatan yang sesungguhnya yaitu sebagaimana dilihat darisistem koordinat yang tetap, dengan kecepatan dan percepatanyangterli-hat dari sistem koordinat yang berputar.
Kita tinjau sekarang suatu titik yangdinat yang berputar dengan kecepatan suduttik ini v* = 0 dan a* = 0 sehingga
x o xi (8)
lazim disebut kecepatan dan percepat
tinggal diam di sistem koor-uJ yang tetap. Makauntukti -
rxS
' = I * 3 *:Titik tersebut terlihat dari sistem koordinat yang tetap akan tampakme-lingkar beraturan dengan percepatan g x g x r yakni sebesar ri't padaarah nenuju ke pusat sistem koordinat. '?Percepatan ini tak ,lain ialah yang kita kenal sebagai percepatan sen-tripetal. Adapun untuk titik yang bergerak dengan kecepatan v* yangte-tap di sistem koordinat yang berputar, yang berarti pula a* I 0, dili-hat dari sistem koordinat yang tetap akan terlihat bergerafi dengan per-cepatan
t - 2u x v* +ulx(rx
yang berarti di samping dengan percepatan sentripetal juga dengan per-cepatan ? g " v" yang arahnya tegak lurus arah,kecepatannya v* dan oa-da arah Seiputalnya sistem koordinat yang berputar. Dercepatafi ini taklain ialah yang kita kenal sebagai percepatan koriolis.
I u,l
:
3.
9
Dari hukum Newton ke II, F = m a dan hukum Newton ke II1, rezlksi =aksi, suatu titik materi yang senula diam, apabila dipaksa untuk berpu-tar mengikuti perputaran sistem koordinat, akan memberikan gaya reaksienersial sebesar m uJ2 r pada arah menjauhi pusat sistem koordinat yangberputar" Gaya tersebut yang disebut gaya sentrjfugal, akan menyebabkantitik materi itu terpelanting ke arah radial apabila tidak dipegang te-tap di sistem koordinat yang berputar. Jadi untuk mempertahankan titikmateri itu tetap tinggal diam di sistem koordinat yang berputar, diper-lukan gaya sentripetal untuk melawan gaya sentrifugal tersebut. Demiki-anlah pula suatu titik rnateri yang semula bergerak lurus dari titik pu-sat sistem koordinat 0, apabitra sekarang dipaksa untuk berputar meng-ikuti perputaran sistem koordinat yang berputar, yang berpusatkan di 0 ,akan memberikan gaya reaksi enersial yang kecuali gaya sentrifugal jugagaya sebesat 2 m o v* pada arah melawan perputaran.Akibatnya titik materi itu tidak lagi bergerak sepanjang garis lurus,melainkan akan terpelanting melengkung. Jadi untuk mempertahankan gerakannya yang lurus sepanjang arah radial dengan kecepatan v* yang tetapdi sistem koordinat yang berputar, diperlukan gaya sentripetal dan gayakoriolis sebesar 2 m r.o v*.
Gerakan di Permukaan Bumi
Sistem koordinat di permukaan bumi sebenarnya adalah sistem koor-dinat yang berputar mengikuti rotasi bumi pada porosnya. l,faka rumus -rumus mekanika di permukaan bumi kalau dikehendaki lebih tepat harus di-koreksi seperlunya.Misalnya rumus hukum Newton ke II
f =' 2* * 2'3 * v* + mLrlx
Jadi dilihat dari muka bumi , Eaya
f*=*g*=f -2rg*v*-mLuxurx:r (10)
Suku-suku kedua dan ketiga ruas kanan tak lain ialah suku-suku koreksikoriolis dan sentrifugal.Denikianlah maka persamaan gerak untuk benda jatuh bebas tepatnya dibe-rikan oleh
B = n g = m a* + 2' nxrx v* + m(])x(r)x r*g
yang menghasilkan percepatan sebagaimana terlihat dari muka bumi sebe-SAI
a*=g (11)
Pada hakekatnya suku sentrifugal o x 0l x r adalah cukup kecil dibandingkan dengan suku-suku yang laj:,. tr6ngafr rnefrgingat bahwa o = 2r/ 2a janr,dan jari-jaribumi r= 6,38x 108 cm, kitahitungutxuJxr= 3138cn/detik sedangkan g kira-kira sebesar 980 cm / detik2.Jadi koreksi sentrifugal ini kira-kira hanya 3.38,/ 980 ..yakni sekitar0 ,34eo saj a.
di permukaan bumi yang tepat adalah
g" I (e)
F akan terasakan sebagai
ra - 2ux v* -(.0 xulxr
10
Dengan mengabaikan efek sentrifugal, persamaan (11) rnenjadi
e*=g-2p*y* (tz)Yang menunjukkan bahwa benda yang jatuh bebas, jatuhnya tidak tepat me-nuju ke pusat bumi, meskipun gaya tarlk bumi, yakni gaya berat atau ga_ya gravitasi, adalah ke arah pusat buni.Lebih lanjut pengintegralan percsamaan (12) terhadap t akan menberikanke cepatan
y.=yl+gt-2 ux f v*' d.t-J
\ta
=y;* gt-zy{q;*gt- 2g*.,f y.or1 dt
= Y; * gt - 22 * (I; * Y;t * , gr2 - 2 w -. .[ r* dt)
=Y;*gt-2ux(I;.!t*',gtz) (13)
karena suku dengan o x gJ x adalah cukup kecil dan dapat diabaikan. Adapun v* dan a* adalafi halga-harga v* dan a* pada saat i = 0.Akhiiilya pefr$integralan persamaan- (13) m6nghasitkan
r* = rJ * Y;t *r\t - 2y * ,/ ,:; * y;t + L4t2) dt
=r*+vIt+t;pt2-2ux (r*t+Lv'2 t 3'io -o 'P- '-o :t + u 8t-) (14)
di mana r* adalah I'rarga r* pada saat t = 0.-oJadi adanya efek koriolis menimbulkan suku dengan 2 u x selaku suku ko-reksi koriolis"
4" Bandul Foucolt
Pada tahun 1851 Foucolt melakukan percobaan untuk meyakinkan ada-nya rotasi bumi pada porosnya, dengan suatu bandul yang cukup berat di-gantungkan pada tali panjang agar dapat tahan berayun-ayun berjam-jan.Karena adanya rotasi bumi, tentunya berayun-ayunnya bandul bersama ta-linya tidak akan berada di suatu bidang vertikal yang tetaptertentu; ar-tinya, bandul akan berayun-ayun sambil berputar. Kita hendak rnenyeli -diki bentuk lintasan bandul itu. Kita tinjau bandul Foucolt yang beradadi daerah yang lintang tempatnya {Q. Kita perhatikan gambar I"4 dan gan-bar I.5.
11
utara utara
!/I
I;r.
t,.l
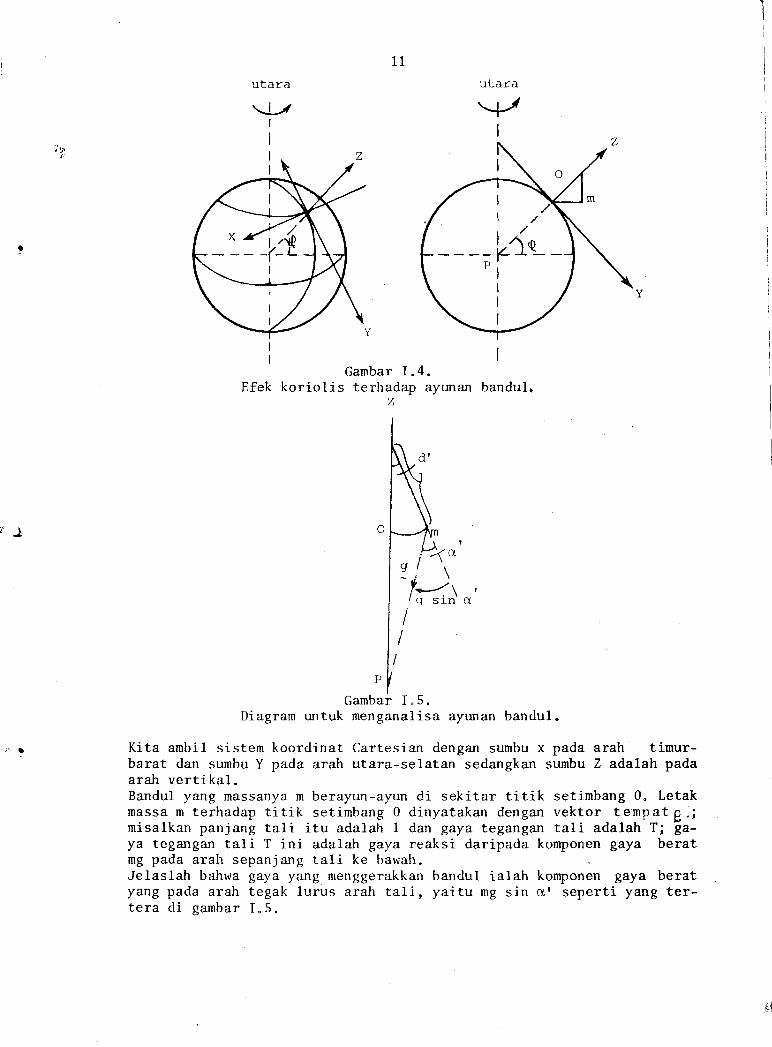
IrlGambar I.4.
Efek koriolis terhadap ayunan bandul.Z
Gambar I"5.Diagram untuk menganalisa ayunan bandul.
Kita ambil sistem koordinat Cartesian dengan sumbu x pada arah tinur-barat dan sumbu Y pada arah utara-selatan sedangkan surnbu Z adalah padaarah vertikal.Bandul yang massanya m berayun-ayun di sekitar titik setimbang 0. Letakmassa m terhadap titik setimbang 0 dinyatakan dengan vektor tempatp.imisalkan panjang tali itu adalah 1 dan gaya tegangan tali adalah T; Ea-ya tegangan tali T ini adalah gaya reaksi daripada komponen gaya beratmg pada arah sepanjang tali ke bawahJelaslah bahwa gaya yar'g menggerakkan bandul ialah komponen gaya beratyang pada arah tegak lurus arah tali, yaitu mg sin or seperti yang ter-tera di gambar I.5.
ti
x r t..Q-(- L
I
I
IrI
I
I
I
l2
Karena jarak bandul ke pusat bumi yakni *p jauh melebihi nanjang tali 1,maka ot z a. Lagi pula untuk o, yang cukup kecil, sinozi sehingga mg
sin cx,t x mg sin o, : mg t"Gaya yang mengayunkan bandul sebesar ng p/ 1 ini adalah pada arah yangberlawanan dengan arah p sehingga gaya tersebut dapat ditulis sebagai-(me/r)pDengan demilian persamaan geraknya diberikan oleh
a*=-9p -2trtxv*- le
Tanpa suku kedua, yakni suku k,oreksi koriolis, persamaan ini tak lainialah persamaan gerak bandul ttrnggal yang menghasilkan getaran harmonik
yangperiodenyaT=2r\F
Selanjutnya dari gambar I.4 kita dapatkan
I -xj*yi*rtdi mana t, i, dan t, ialahkoordinai Xl v dan-Z.Dari aljabar vektor, kita
1
(r)xv*=
vektor-vektor satuan sepanjang sumbu - sumbu
{-:
ixfi
$
x
Il$
I
fii
IIt
dapat
v* v*xy
menul is
J
OJ
v
8lurl,l
";l
Dari gambar I.4 jelaslah bahwa sumbu X tegak lurus ul sehinggatrl* = 0,sedang 0,, = - lrt cos Q dan 0, = 0 sin t{" . .Adapun v* , v* dan v* tak ISin ialah x, y dan z.
Karena ayunannya cukup keciI, gerakan bandul boleh dikatakan berada dibidang datar, maksddnya komponen gerakan ke atas dan ke bawahnya bolehdiabaikan yang berarti vl = z x 0.Dengan mengingat ha1-l-ralztersebut, kita peroleh
g *y* = (- uri sin q) i . (r,r i sin Q) I . (, i cos Q) !dan akhirnya persamaan di atas menghasilkan
I=-$**2urlsin{g'i=-fv-2urisinQ
$
&
( 1s)

n
L3
Lagi, tanpa suku kedua, suku koreksi koriolis, persamaan (15) ini taklain ialah persamaan getaran harmonik yang periodenya
]r;oi l\fr-lmolrly diuraikan menjadi komponen-komponen pada arah-arah
Persamaan (15) di atas menghubungkan gerakan-gerakan sepanjang sumbu X
dan sepanjang sumbu Y yang berarti menentukan bentuk lintasan bandul.Untuk meneliti bentuk lintasannya, kita gabungkan kedua persalnaan (15)
. . di atas dengan menuliskan
rdi mana i =V -_l,ryakni dengan mengingat resultante simpangan yang di-berikan oleh V (*' * y').Dengan penulisan demikian, akan kita peroleh
ii=-(2oisintp),1 -+u (16)
Persamaan ini menyerupai persamaan getaran teredarn dengan suku periamaruas kanan selaku suku redaman.Maka kita cobakan penyelesaian dalam bentuk
u=AetrtIni akan memberi-kan
)t -- ? Itri = tr A e^ dan ii = )." A e
Apabila harga-harga ri dan ir' iri kita masukkan ke persamaan (16), naka,,._) akan kita dapatkan
)l.'=-(2oisintQ)),-+yang Ialu menghasilkan
.rl
l--u-risinQ+ icx
dengan
.))ocL,= /(^' sin'(Q. f )
yang dengan mensubstitusikannya ke penyelesaian di atas menghasilkan
iult sin 0 + i o, tu=Aere-yang 1a1u menghasilkan penyelesaian umum,dalam bentuk
u = e -i tlt sin Q (r"i o t * be-i u t,
14
Selanjutnya dengan nengingat
+ iote-
penye lesaian
U=U
dengan
u =[a+b)o'Dengan menuliskan
u=x+i
cos0tlisinot
atas menjadi berwujud
(l)tsinq
vo
cos0t
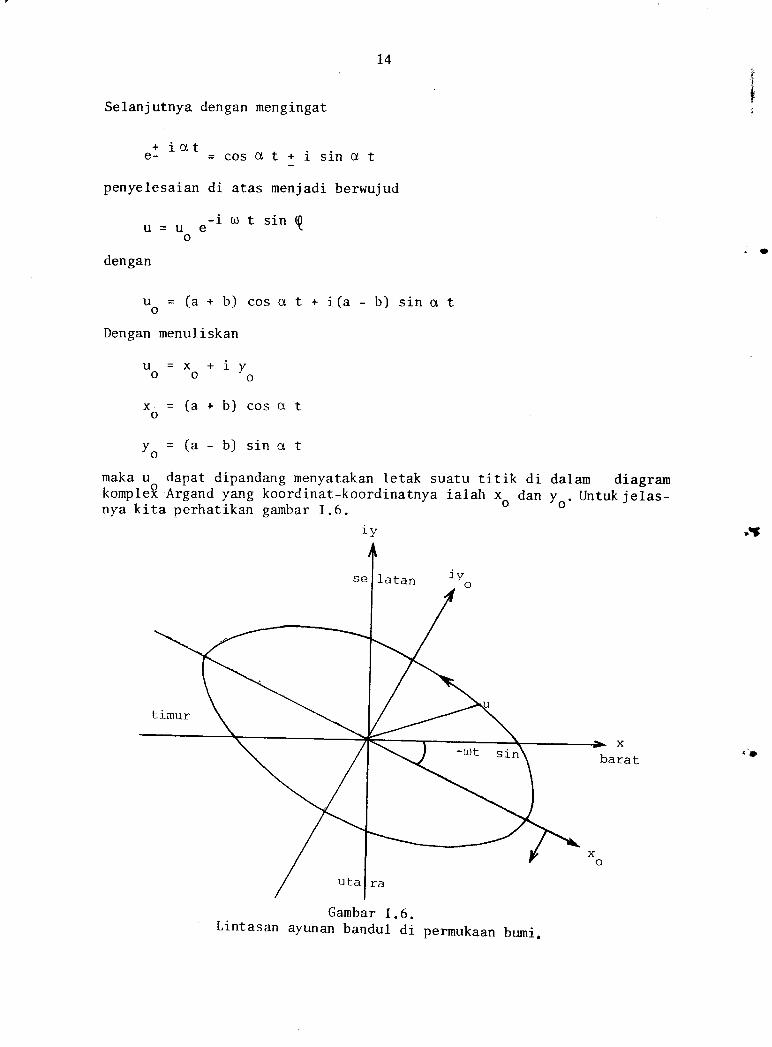
Gambar I.6.Lintasan ayunan bandul di
cos cr t + i(a - b) sin o t
=
di
-ie
oo
x = (a+b)o
Yn=(a-b)sinctt
maka u^ dapat dipandang menyatakan letak suatu titik di dalam diagramkompleX Argand yang koordinat-koordinatnya ialah xo dan ro. Untuk jelas-nya kita perhatikan gambar I.6.
,!,
1 atan
-(r)t sin
permukaan bumi.
15
Dari persamaan di atas terlihat bahwa variasi x dan y_ terhadap waktusenantiasa menurutkan hubungan o '
2.xo
(a + b)-yakni memenuhi persamaan
Jadi titik u bergerak sepanjang lintasan elipso
2nI =- 0
01elr karena sebenarnya uJ cukup kecil , maka u=/, * ,n.l!vg
yakni hampir sama denganperiode ayunan bandul yang Lazimkita kenal itu.Lebilt lanjut, persamaan (17) menunjukkan bahwa lintasan bandul yang se-benarnya, yakni yang diberikan oleh u, adalah lintasan titik u yang berputar dengan kecepaian sudut - osin tp. o'Dengan mengamati gambar I.6 kita perhatikan bahwa dilihat dari sistemkoordinat X - Y yang tetap di permukaan buni, lintasan bandul adalahelips yang berputar pada sumbu Z pada arah barat ke utara ke timur keselatan. Dengan perkataan lain bandul akan berayun sepanjang elips san-bil berputar sekeliling sumbu vertikal menurutkan perputaran elips lin-tasannya" Adapun periode perputaran itu menurut persamaan (17) diberi-kan oleh
Tl = ( 18)trt sin
Q
Untuk bandul yang berada di sebelah selatan katulistiwa, arah perputar-an itu adalah sebaliknya, yakni pada arah dari barat ke selatan ke ti-rnur lalu ke utara. HaI ini ternyatakan pula dari negatifnya harga sin {Q
karena Q. O,sehingga kecepatan sudutnyapun yang diberikan oleh -ttl sintpberharga berlawanan dengan kecepatan sudut untuk t[ fang positif yakniuntuk tempat di sebelah utara katulistiwa
"Di daerah katulistiwa, Q = 0 se[ingga T' =(u) yang berarti bandul ti-.dak berputar, sedangkan di daerah kutub, Q = 90" sehingga Tr = 2tr/a= 24jam yakni paling pendek kalau dibandingkai dengan periode putaran tmtukdi daerah lainnya.
5" Gaya SentralYang dimaksudkan dengan gaya sentrit iatah gaya yang selalu menuju
ke atau mengarah dari suatu pusat, dan besarnya hanya tergantung padajaraknya dari pusat itu.Dengan mengambil pusat tersebut sebagai pusat sistem koordinat, Eayasentral itu dapat ditulis sebagai
I
2yo
-1(a + b)z
e1 ips "
dengan periode
sehinggaob
T
ilt
2r
.n. a
= F(r) ? ( 1e)

Jadi menurut persamaan
i- (r-dan
16
(3) percepatannya ialah
r62)t
6r=o
(20)
(21)
dengan r x ki-
12 adalah tetap, misalnyasamade-
(22)
I3
20r+
Dari persamaan (20), dengan mengalikan kedua ruasnyata dapat l[.
sebab ? x ?
Akan tetapi di lain pihak
(:*
(r*karena 0. Jadi kita dapat menarik kesimpularr bahwa
= tetap
Ini berarti bahwa vektor yang tegak lurus g dan;! adalah tetap. Tetapibidang lintasan adalah bidang yang mengandung vektor koordinat r danvektor kecepatan i yang berarti bidang lintasan itu tegak lurus vektorI x I yang menurut di atas adalah.tetap. Dengan demikian makasudahten-tu ini berarti bahwa bidang lintasannya tetap atau dengan perkataan lainlintasannya adalah koplanar yakni ada di bidang datar tertentu,
Dari persamaan {21) dengan mengingat bahwa persamaan (21) itu da-pat pula dituliskan sebagai
o)(0r')-0
r*i=9=9
..dfXf=-- dt
d=-- dt
ar)-rxr
:)TXf=
rxr
t
kita dapat menarik kesimpulan bahwa 6
ngan suatu tetapan h; atau dirumuskan
2r =h=tetap
1di'a?
0
Kita perhatikan bahwa ruas kiri persamaan (22) tersebut adalah rnomen da-ripada kecepatan sehingga kalau dikalikan massa m menjadi suatu impulsputar. Maka liendak kita selidiki apakah memang impuls putar, yakni mo-men daripada impuls, untuk gerakan titik materi oleh gaya sentral ada-Iah tetap.Adapaun impuls putar terhadap suatu titik pusat koordinat, didefinisi -kan sebagai
l7
I=:**fJadi dengan mengingat persamaan (2) impuls putar itu ialah
x(i'?*.6e)H=m r
=mrlx(it*r6e)Dengan mengingat bahwa ? x i = 0, maka impuls putar itu adalah
.?I=*0r-?xC
Untuk gaya sentral, berlaku persamaan (22) sehingga
I=*h?x3=mldengan h ialali suatu vektor yang besarnya I'r dan arahnya pada arah i x 3yang belarti sejajar arah sumbu putar.Demikianlah maka karena r x r adalah tetap dan h adalah tetap, maka be-sarnya maupun arahnya imfru1s-putar oleh gaya sentral adalah tetap; atausingkatny, I = tetap.
Berikut ini hendak kita selidiki persamaan gerak oleh gaya sentral.Kerapkali persamaan gerak tebih mudal, dijabarkan dari hukum kekekalantenaga mekanik.Untuk gerakan oleh gaya sentral, kiranya persamaan geraknya akan lebihmudah dipelajari apabila dipakai sistem koordinat po1ar. Di dalam sis-tem koordinat polar, persamaan gerak itu tentunya akan berwujud hubung-an fungsional antara koordinat r dan 0 dan waktu t dengan tenaga totalyang tetap tertentu dan tenaga potensial V = V(r) selaku parameter - pa-rameternya"Kita mulai dengan menjabarkan tenaga kinetik
K = ti * u2 = L, mv.u = >, ^|"|
, G: * ,6 e) . (i I * ,6=11 irz *\nr02
atau^ _2
K ='i nit * \y ftZr
ciengan mengingat ?.3 = 0 karena ? | 3 d* mengingat pulapersamaan (22).Perlu aipeitrattkafr 6ahwa i / lvl-
" - l;l , dan i.-ini'ialai perubahan -iarak radial per satuan waktu, blkannya ftecepatan
Selanjutnya dari hukum kekekalan tenaga mekanika
K.
3)
(23)
(24)
il,iluro PrrPultrlaes
tawc Timur
A. 1993 ',
199'
E = K + V(r)
18
dan persamaan (24) di atas kita peroleh
2E
m
yang la1u menghasilkan
dr=dt
dan
tT= 2V [r)
m
)h---zI
(2s)
(26)
2Y (r)
m,
dr
2E
m
l'r)
r
di mana r ialah harga r pada saat t = 0, yakni berhubungan dengan ke-dudukan afta1 titik niteri. Persamaan (zoj ini menghubun[-ian kidudukantitik materi r dengan waktu t, dengan menyatakan t sebagai fungsi r.(Bukannya r sebagai fungsi t).Lebih lanjut dengan menuliskan
persamaan (25)
dr dr d0=_dr d0 dtbersama persamaan (22) nenghasilkan
{f=
yang 1a1u memberikan
0=0 +o
12
Adapun bentuk lintasannya akanra variabel-variabel r dan 0 "oleh dengan substitusi.
(27)
(28)
h2r
diberikan oleh huburgan fungsional anta-Hubungan ini ternyata lebih mudah diper-
drd0
2E
m
2v (r)m
dr
2E_
m
2v(g _
m
1U=- r
19
Dengan substitusi ini, kita menulis
dr= 1--2 duu
dan
d0
yang bersama persamaan
7do(27) menghasilkan
dudr
du1ao= -h-
Dari persamaan ini kita peroleh harga nolkian rupa hingga
untuk $6'-, x*tni
(2e)
yang sedemi -
2V(r) .2 2
m
yang berarti
u=uatau
2r. _ 2v G)mm (30)
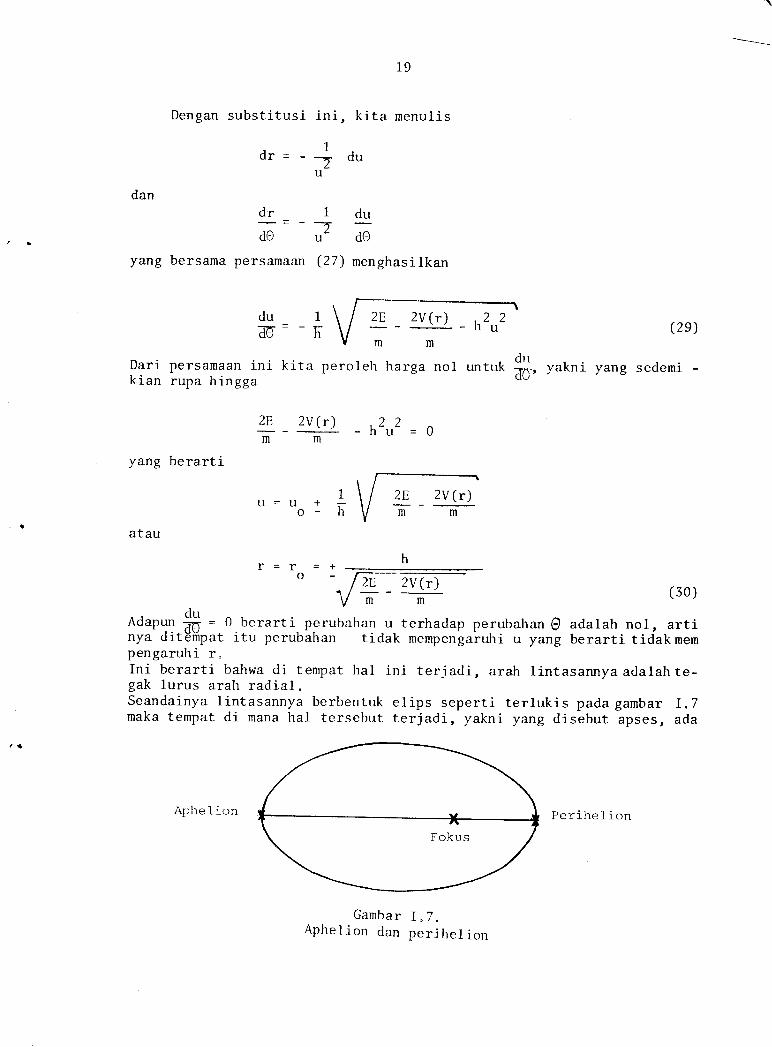
Adapun $$ = o berarti perubahan u terhadap perubahan Q adarah nol, artinya ditdftpat itu perubahan tidak nempengamhi u yang berarti tidakmempengaruhi r"Ini berarti bahwa di tempat hal ini terjadi, arah lintasannyaadalahte-gak lurus arah radial.Seandainya lintasannya berbentuk elips seperti terlukis pada gambar I.7maka tempat di mana hal tersebut terjadi, yakni yang disebut apses, ada
Aphelion Perihelion
Gambar I " 7.Aphelion dan perihelion
2E
m
1+-o- h
20
lah di sebelah menyebelah titik fokus elips sepanjangApses untuk lintasan elips demikian disebut periheliontltik fokus dan aphelion untuk yang satu lainnya.
Contoh gaya sentral yang kita jumpai sehari-haritik, gaya elektrostatik dan gaya gravitasi. Gaya-gayarut dapat dituliskan dalam bentuk
F--kr=-kr?
-k t=+..--TfL-r
p=-
6. Hukum-hukum SePPlerGerakan planet-p1anet, termasuk bumi, sekeliling matahari, tak lain
disebabkan otLh gaya tarik matahari yang adalah gaya sentral dengan ma-
tahari selaku PusatnYaJohannes Keppler (1571 - 1630) adalah orang yang pertama-tama merumus -kan lintasar,- planet-planet sekeliling matahari yang kemudian dikenal se-bagai hukum-hlkum Keppler I, II dan III yang hendak kita bicarakan ber-ikut ini.Kita selidiki gerakan oleh gaya gravitasi untuk mempelajari gerakanpla-net-planet sek6li1i-ng matahari. Sebagaimana besar gaya gravitasi-ituberbanding terbalik dengan kwadrat jarak dan pada arah ke pusat, maka be-gitu juga halnya dengan percepatan gravitasi, Jadi percepatan gravitasiitu berbentuk
( 31)
persamaan (31) ini bersama persamaan (20) memberikan
k^-z:r
sumbu panjangnya.r:ntuk yang dekat
ialah gaya elas-itu bertufut - tu-
(32)
I
..a -z:r
:2arU =--Z'r
yang dengan mengingat persamaan (22) serta dengan substitusi
U=
menjad, ., z )il .h'u'=-au"
Untuk menyatakan r sebagai fungsi u dan Q, kita tulis
f=
drm
1
r
dr drdt do
d0 I?rr= u1'=
yang dengan persamaan (22)
,1i-
o cl-hu" - ?$=
Selanjutnya
27
dan substitusi
du-au
adi"6=
menberikan1U=- r
_d;-E=.2=-hu
dO'E=)du
--:do'
menj adi
)?fl u= -
hu2 Su ,- ndia2
du;6)
sehingga persamaan (31)
l'2u2 d2u -
do2atau
au
)du62.
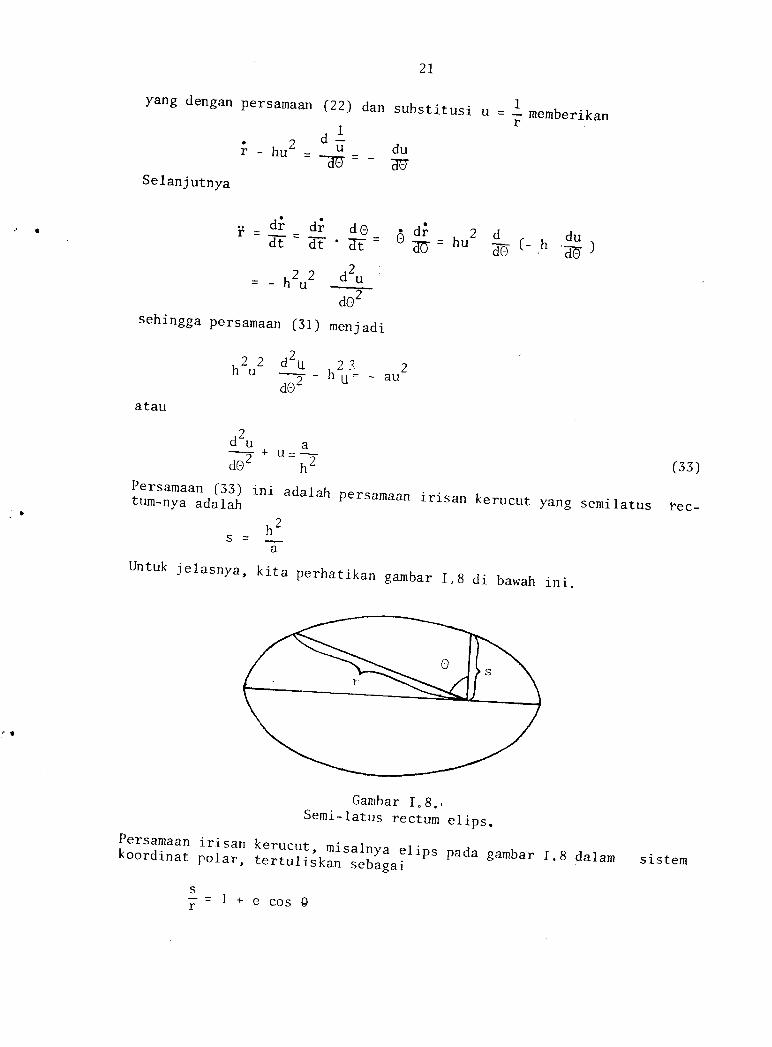
Persamaan (53) initum-nya adalah
(33 )
semilatus fec_persamaan irisan kerucut yang
di bawah ini.
au--,h'
adalah
)c _ h'
TUntuk jelasnya, kita perhatikan gambar I.,g
Persamaan irisankoordinat polar,
Gambar I. g.,Semi_latu-s rectum elips.
ferucyt, misalnya elips pada gambartertuliskan sebagar
ecos0S 1+r
I.8 dalam sistem

22
atau su = 1 + e coso
yang menghasilkan
(34)
&1do2*'= s
Irisan kerucut itu adalah elips apabila eksentrisitas e dalarn persamaan(34) lebih kecil daripada 1 dan hiperbola bilanana e lebih besar dari-pada 1 serta parabola jikalau e = 1 dan lingkaran bilamana e = 0"Lhtuk menyelidiki gerakannya lebih lanjut, kita berpaling ke persamaan(28), yakni persanaan gerak di dalam sistem koordinat polar.Terlebih dahulu kita tuliskan tenaga potensialnya sebagai berikut
Jadi
43a-7r
* i !. t'atr
+ rdr.)
am-7r
am-2r
11__l'2 '1
?. (r edo
dr
dv = _ I.{.
r'zv2 - vr = - J
,1
Dengan mengingat persamaan (36) persamaan ini lalu menjadi
rt2Y2-vt=- J -mt1
/1
/'t1
,/"t1
,2
I.{" _rt1
?" a (.?)
rZ
Ti.{'
+?dr)
=_rna(
23
Sebab 1? = I dO dan 3"9 = o sedangkan ?.f
*un:"1r.1j.:lrrn rungi.lkrn v = o or, =--j,'1 = V untuk rl = " kita perolelrrrav=-mr
.sehingga persamaan (27) meniadi
- 1.
dan mengambil Lo - (4z serta
do= dr hx_2r
yang
Integral ini
2E
-+mu= 1r
["u
dengan substitusi
roJ do =0
oo
akan menghasilkan
di atas Ialu menberikan
a--o ,zh
a
ITo-o =-o s1n sln
yakni
(3s)
persamaan
Apabila untuk udu - odiambilhargaudiapsesaE = 0, maka persamaan (29) memberikan
2E 2a ))_+__h_u-=0mr)tratau #*r^u-h2u2=11
yang menghasilkan
..= p .\f-i"{
Di perihelion, untuk r_ nyamengingat u_ - 1/r6 Ue9artiyakni o
u =a- +ozn
sedangkan di aphelion
berharga keci 1, yang dengandiambil yang berharga besir,
2a
;r+
24
diambil yanguntuk uo nya
2E--. zmh
(36)
(s7)
gambar
aU---o ,2
n
2a2E.4 )h rnh-
Selanjutnya dengan mengambi_l 0^ = 0 untuk perihelion (perhatikanI.8), persamaan (40) bersama pSrsarrrn ijoi-r""ghasi1kan
l.\ 'i'-1i=+1l.?,? )
=in.1
lr*1au--f-h-
_1- s1n _t
T
2 t
atau s1n
yang lalu memberikan
cos0=
dan selanjritnya)
h-U=
a
o+I-"2a
+
l',4
2E--mll
au---tl)
a:T
l'l
2E+ --amh-
1+ 1+ 2Eh2___z cosma
(38)
Persamaan (38) initum
s
dan eksentrisitas
E-L--
Lebih lanjut dari
E=\_1-
atau
2V=
25
tak lain ialah persamaan
)h'=- a
(34) dengan semilatus . rec-
(3e)
- 2Eh2r+ -'2ma
Dari persamaan (39) ini jelaslah bahwa lintasannya adalah eliptik apa-bila E < 0 yakni tenaga totalnya adalah negatif, hiperbolik bilamana E> 0, parabolik jika E = 0 dan lingkaran kalau
2ma"'T2h'
hukum kekekalan tenaga mekanik')
mv- + \'(r)2amv -m r
2E 2a+-
dan mengingat ketergantungan bentuk lintasan akan E di atas ternyatalahbahwa lintasan akan berbentuk
2a-r.
2ar
Lintasan yang berbentuk hiperbola dan parabola,y berarti titik materi takkan kembali mengulangi lintasannya semula. Dengan perkataan 1ain, titikmateri takkan kembali apabila kecepatannya cukup besar sedemikian hing-ga
u2,
Batas kecepatankan oleh
2V=
elips apabila "' . ?hiperbola apabila v2 >
parhbola apabila v2 =
2aTdi mana titik materi takkan kembali yakni yang diberi-
2g atauv=\i 4 (40)1ur
26{ilF
disebut kecepatan hilang (escape velocity)Kita uji sekarang kebenaran hukum-hukum Kepp1er"Hukum-hukun ,itu adalah sebagai berikut19 Lintasan planet-planet sekeliling matahari, berbentuk elips dengan
matahari di salah satu titik fokusnya.
29- Luasan yang disapu oleh vektor radius planet terhadap matahari persatuan waktu adalah tetap"
39 Kwadrat periode mengelilinginya matahari, (periode revolusi) seban-ding dengan pangkat tiga jarak rata-rata planet dari matahari"
Menurut Newton, Eaya tarik antara benda-benda angkasa berbanding lurusdengan massa masing*masing benda dan berbanding terbalik dengan kwadratjarak antara kedua benda dan tetapan kesebandingan itu adalah universal,artinya sama untuk semua benda.Secara matematis hukum Newton tentang gravitasi tersebut daoat dirumus-kan sebagai
!'=-"ryrr
? iatatr satuan vektor sepanjang vektor|ang lain; dan G ialah apa yang disebuttemyata besarnya ialah
G = 6,67 x 1o-8 dyr" .*'1gr^ 2
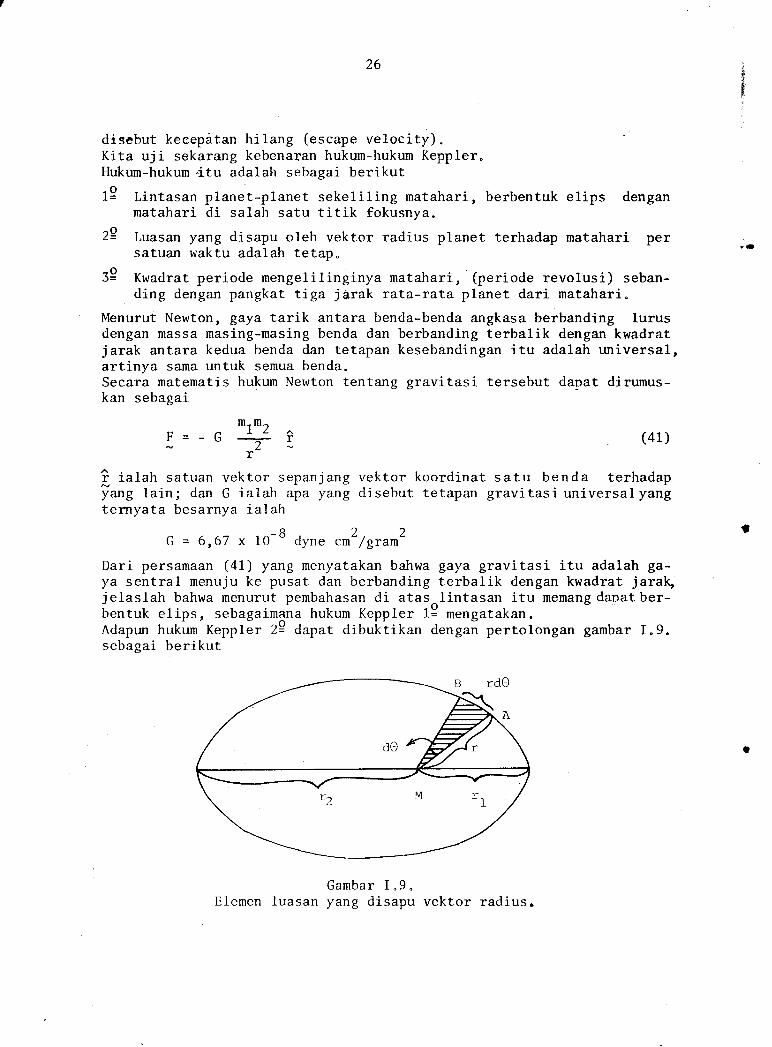
Dari persamaan (41) yang menyatakan bahwa gaya gravitasi itu adalah ga-ya sentral menuju ke pusat dan berbanding terbalik dengan kwadrat jaralgjelaslah bahwa menurut pembahasan di atas^lintasan itu memang daoatber-bentuk elips, sebagaimana hukum Keppler 19 mengatakan.Adapun hukum Keppler 2e- dapat dibuktikan dengan pertolongan gambar I.9.sebagai berikut
Gambar I "9 "Elemen luasan yang disapu vektor radius.
(41)
koordinat satu benda terhadaptetapan gravitasi universal yang
't
27
Dari gambar I,9 terlihat bahwa elemen luasan dL, yang disapu oleh vek-tor radius misalnya dari A ke B holeh dikatakan sama dengan luas A MAB
dengan panjang AB kira-kira sebesar rdO. Dengan perkataan lain
dL=\ (rdO) x r = ,rr2d}Jadi luasan yang disapu oleh vektor radius per satuan waktu adalal"r
dL_, 2 d0 , .2&:>rT-
*"=Lr-0
yang dengan mengingat persamaan
dL: ''>zllctt
yakni tetap sebab h ada14h tetap"Akhirnya hukum Keppler 39 akan ierbuktikan dengan nenerapkan persamaan(26) untuk menghitung periode revolusi planet. .l
Dari persamaan (36) dan (37) dengan mengingat u = : , kita peroleh ja-rak antara aphelion dan perihelion R misalnya, yakfii
(27) dapat ditulis sebagai
ft=2E* ---Tmh-
ma=_ _
E
yang 1a1u memberikan tenaga total-maL--R (42)
Selanjutnya, di atas telah kita jabarkan bahwa tenaga potensialnya yangmemenuhi persamaan (31) diberikan oleh
v = -.: (4s)
Substitusi persamaan-persamaan (42) dan (43) ke persamaan (26) denganbatas integrasi dari perihelion ke perihelion lagi (1ihat ganbar I.9.)memberikan periode
,2
'1--1 dr
a-)h-
/t1(44)
2a+
R
2a
rrdi
h-zr
jika r1 ion,
- dan_tyaKn]-
2a
r, berturut-turut adalah harga perihelion dan di aphe-
28
tl = (4s)
(46)
a:Tlr
a
-+')l"r -
2E+- .2mh
,2
a- 2E-t*--hmh
Penyelesaian persamaan (44) dengan mengingat persamaan-persamaan ( 45 )dan (46) akhirnya menghasilkan
2r
G
-2 4tr2 -3I =
-fa
bila i yakni setengah jarak antara perihelion dan aphelion kita pandangsebagai jarak rata-rata antara^planet dan matahari. Dari persamaan (47)terbuktikanlah hukum Keppler 3I tersebut"
Adapun ketergantungan kecepatan planet akan jaraknya dari mataha-ri, dengan mudah diperoleh dengan substitusi persamaan-persamaan ( 42 )dan (43) ke persamaan hukum kekekalan tenaga mekanik.
E=K+Vyang lalu memberikan
a
?-
atau
T-
ma- T -'cmv
(, N3/2
(48) ini terlihat bahwayaitu sewaktu r besar,
(47)
(48)
sewaktu planet berada lebih jauhgerakannya lebih lambat "
t
2a-m*ryakni
V=
Dari persamaandari matahari,
29
II. MEKANIKA SISTEM MATERI
Titik Berat
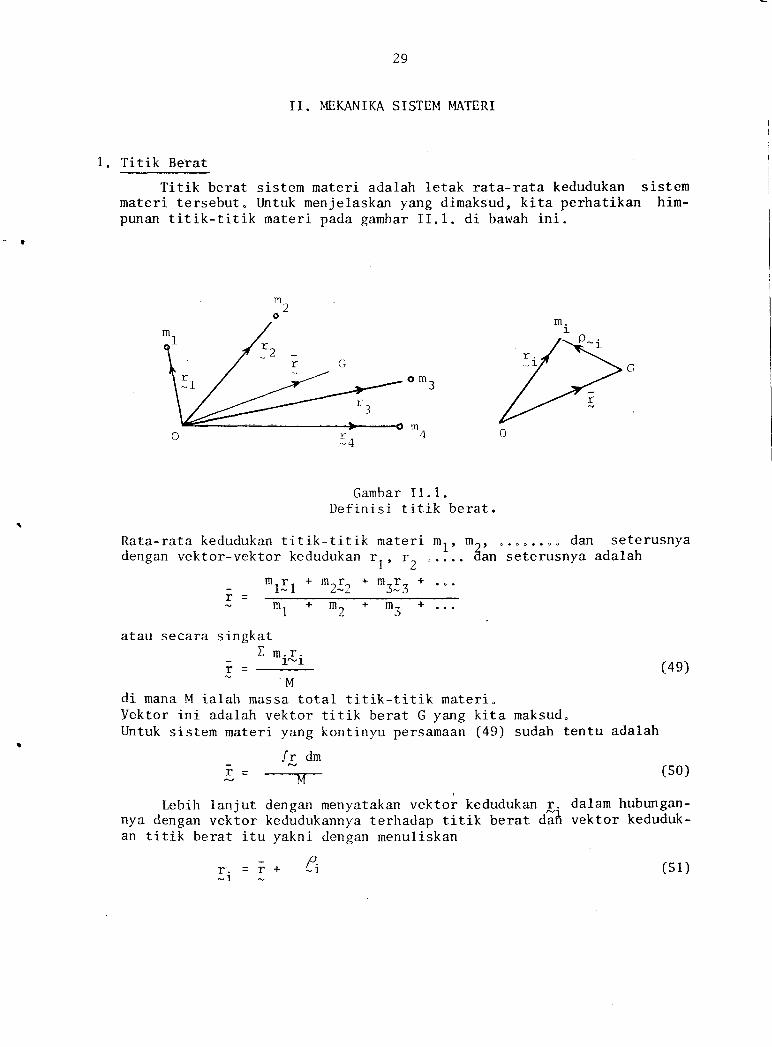
Titik berat sistem materi adalah letak rata-rata kedudukan sistemmateri tersebut" Untuk menjelaskan yang dirnaksud, kita perhatikan him-punan titik-titik materi pada gambar II.1. di bawah ini.
ot3
m4
Gambar II " 1.Definisi titik berat.
Rata-rata kedudukan titik-titik materi m,dengan vektor-vektor kedudukan rr, ,2 ".:
*tfl * *zfz * *3f3 * ''
, fr),ilan
*1*^2 * ,3 + ...
atau secara singkatI m.r.
! = t-t (49)'M
di mana M ialalr massa total titik-titik materi"Vektor ini adalah vektor titik berat G yang kita maksud"Untuk sistern materi yang kontinyu persamaan (49) sudah tentu adalah
_ "fr dm
L - ------FT- (s0)
dengan menyatakan vektor kedudukan 1= dalam l'rubtmgan-kedldukannya terhadap titik berat difr vektor keduduk-yakni dengan menuliskan
+ '1
dan seterusnyaseterusnya adalah
i=
Lebih lanjutnya dengan vektoran titik berat itu
m ,2
o
(s 1)

30
dari persamaan (49) kita peroleh
t m. O: = flL,'.' rr -:yang berarti bahwa rata-rdta vektorlah no1.
(s2 )
kedudukan terhadap titik berat ada-
2. Hukum Kekekalan ImpuLs
Impuls sistem rnateri didefinisikan sebagai jumlahmasing titik materi; atau secara singkat
!= r,1i= r*iiiDari persamaan (49) dengan mendiferensialkannya terhadapkan
. I m.r.- 1-1f = --lM-
atau Mi=rm.i.
- la1
Maka menurut persamaan (53) kita peroleh
L=Ml
impul s masing-
(s3)
t, kita dapat-
!N
(s4)
Jadi kita dapat mengatakan impuls sistem sama dengan impuls titik berat;yang dimaksud impuls titik berat adalah impuls titik massa yang seolah-olah berada di titik berat dengan massa sebesar massa total sistem danbergerak menurutkan gerakan titik berat.
Selanjutnya gaya pada sistem materi didefinisikan sebagai jumlaltgaya-gaya pada masing-masing titik materi; atau dirumuskan
p = I F.
Dengan mengingat hukum Newton
I='idan mengingat persamaan (49) kita peroleh
F=Miyang berarti gaya pada sistem sama dengan gaya terhadap titirnaksudnya sama dengan gaya yang seolal'r-olah bekerja pada suatusa yang berada di titik berat dengan massa sebesar massa total
(ss )
serta bergerak menurutkan gerakan titik berat.Perlu kita perhatikan bahwa gaya yang bekdrj a pada masing-masing titikmateri dapat terdiri atas gaya dalam maupun gaya luar; yang dimaksud de-ngan gaya dalam ialah gaya interaksi antara titik-titik materi satu sa-ma lainDengan perkataan lain kita dapat menuliskan
F. = F. (1) * F.
(d)-1 -1 -1
(s6)
k be4at,titik mas-
sistem
(s7 )

3L
atau F. = F.('1) + r.F.. (s7)-1 -i j*rj
di nana F. . adalah gaya oleh m. terhadap m..-lJ ) ' 1
Tetapi menurut hukum Newton ke III, reaksi sama dengan aksi,
Iij = - I:tsehingga
TIi ; It:-o
yang dari persamaan (57) berarti
F = r F" = I p-(1) (58)11
Jadi gaya pada sistem materi sama dengan jumlah gaya-gaya luar pada ti-tik-titik materiDari persamaan-persamaan (58), (56), dan (49) tertihatlah bahwa apabilatiada gaya luar yang bekerja pada sistem materi, maka
rmrir=9yang berarti
Liii = tetap (59)
yakni jumlah impuls titik-titik materi adalah tetap terhadap waktu.Pernyataan ini disebut hukum kekekalan impuls. Hukum ini sangat berman-faat daTam analisa tumbukan antara titik-titik nateri.
3. Tenaga Kinetik Sistem Materite-
(60)
te-t.ta-hat i
Yang dimaksud dengan tenaga kinetik sistem materi ialah jumlahnaga-tenaga kinetik masing-masing titik materi.Atau kalau dirumuskan :
K=LK. =L\r.i..i.r I - 11 I
Seperti pada pembahasan-pe*trf.,Jrrri di atas, kita hendak menyatakannaga kinetik itu dalam hubungannya dengan tenaga kinetik titik beraI.jntuk itu vektor kedudukan masing-masing titik.materi akan kita nyakan dalam hubungannya dengan vektor kedudukan titik berat. Kita perkan lagi gambar II.1 di atas"
tl, (ni.ri) - I I f: .P-i ).(I * 0-i),ft)Im.(i.,i.)=f mi (i+0-1).(i *0-i)
3'2
Tetapi menurut persamaan {52)
d-Im.o. ---=- r m.0'l " 1 dt 1-
sehingga a"ti ]"rramaan (60)
K = Lz Ui2 * L, I mi
Dengan perkataan lain, tenagatenaga kinetik titik berat danri terhadap titik berat.
Impuls Putar Sistern Mate_ri
5=-rxm-r=_rxqvJadi impuls putar yang memberinyatakan oleh vektor PerputaranAdapun arahnya adalah pada arahperputaran sekrup itu mengikutihat gambar 1I.2. di bawah ini.
-. rG)KG * I *, t" (61)
sistem materi sama dengan jumlahkinetik maslng-masing titik mate-
.-01ry
.2p=1
kinetiktenaga
I
i
Ii
4.
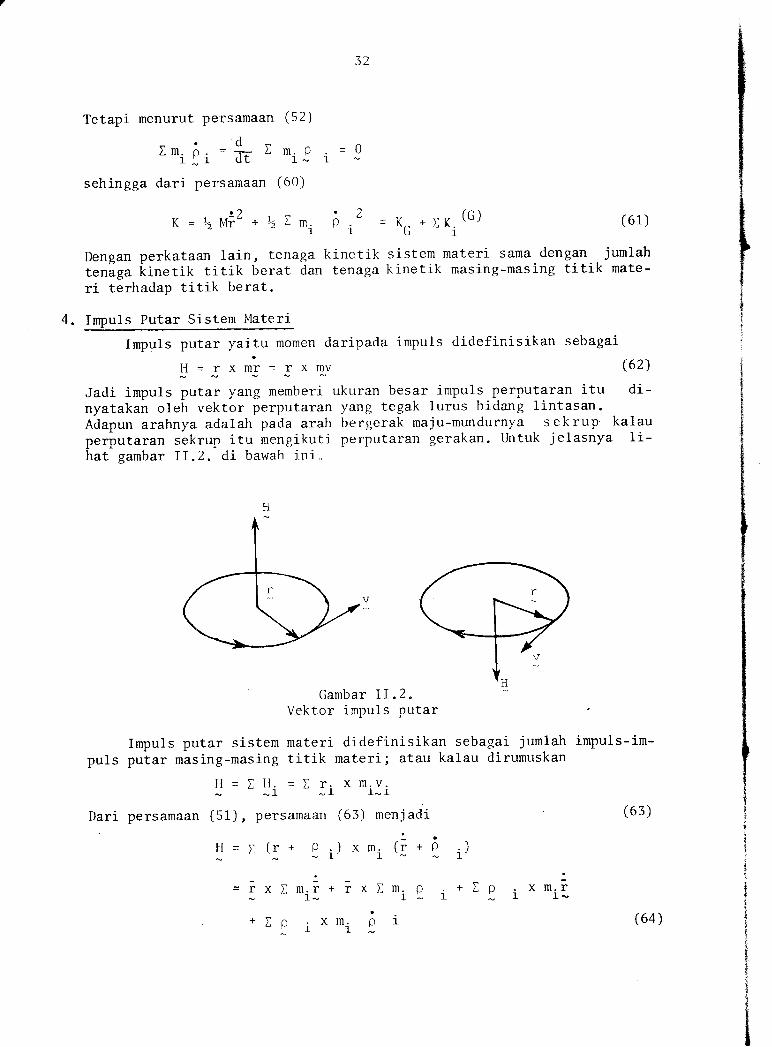
Impu1s putar yaitu momen daripada impuls didefinisikan sebagai
(62)
ukuran besar impuls perputaran itu di-yang tegak lurus bidang lintasan.bergerak maju-mtmdurnya s ek rup' kalauperputaran gerakan. Llntuk jelasnya li-
Impuls putar sistempuls putar masing-masing
11 = ; FI.- -1
HGambar 1I.2.
Vektor impuls putar
materi didefinisikan sebagai jumlahtitik materi; atau kalau dirumuskan
= I f . X m.V.-1 1-1
impul s - im-
(63)Dari persamaan (51), persamaan (63) menjadi-
l.l=)t (:* gi)*ri(I*l i)
-:-:=rxIm.r+rxLm. 0 . +I0 . xm.r1- - I - 1 - I I-
+ r o * *. 3 iII:(64)

Suku pertama
a
atau
dimanal=IUntuk sistem
ruas kanan dapat
xiIm. =ixYI,i-1
33
dituliskan sebagaiI
=rxfllr
suku kedua ruas kanan adalah nol sebab dari persamaan (52)
Im.6 . -o1: I -Sedangkan suku ketiga ruas kanan adalah
I p , X ill.i = - i x I m. o - 0L 1 1. ;---"'iiidengan mengingat persamaan (52)
Dengan demikian persamaan (64) menjadi
H_=f *rui*I !i*ri f ,atau 5=Ic* tUrtt'Persamaan (65) ini mengatakan bahwa impuls putar sistem materi sama de-ngan impuls putar titik berat (H^) ditambah jumlah ippuls - irnpuls putarmasing-masing titik materi terhadap titik berat (H. ('7). rmpuis putartitik berat ialah impuls putar suatu titik rnateri i*g- seol-ah-otah- adadi titik berat yang massanya sama dengan jumlah nassa-masing-masing ti-tik materi.
Kita tinjau sekarang keadaan khusus di mana suatu titik materi ber-putar sekeliling pusat sistem koordinat dengan jarak titik materi kepu-sat yang tetap.Llntuk gerakan demikian, besar kecepatannya adalah
v=urr (66)Selanjutnya dengan mengingat definisi vektor kecepatan sudut u-r di bab I,pasal 2, persamaan (63) dan persanaan (66) menghalilkan
H=Ir.xm.v.- -1 1-1
=Ir.?xmor.3L- 1-)
= ( I m.r.-) ur i x 311
=(r
(6s)
')g
q
adalah apa yangyang kontinyu,
)I {dn
m. r.11
U=I2
m. r.1 1.mat.erl
I-
(67)
disebut momen enersia sistem materi.sudah tentu
J
(68)
f
34
atau
yang
5. Momen
Kalau persamaan (67) di atas kita bandingkan dengan persamaan (54) nakaI bersesuaian dengan massa sebagaimana impuls putar H bersesuaian de-ngan impuls L dan kecepatan sudut 6 bersesuaian dengan kecepatan linierJ.
Adapun tenaga kinetik perputaran sistem materi yang hanya berputarsekeliling pusat seperti di atas, diberikan oleh
.2K = L 4 m.v.l-1
= L \ m. (o.r r. )2- 1' l'
)2= tz (L mir.-)ut
)y=\Iu' (6e)
Mv-.
kita hendak
bersesuaian dengan tenaga kinetik gerakan linier K=\
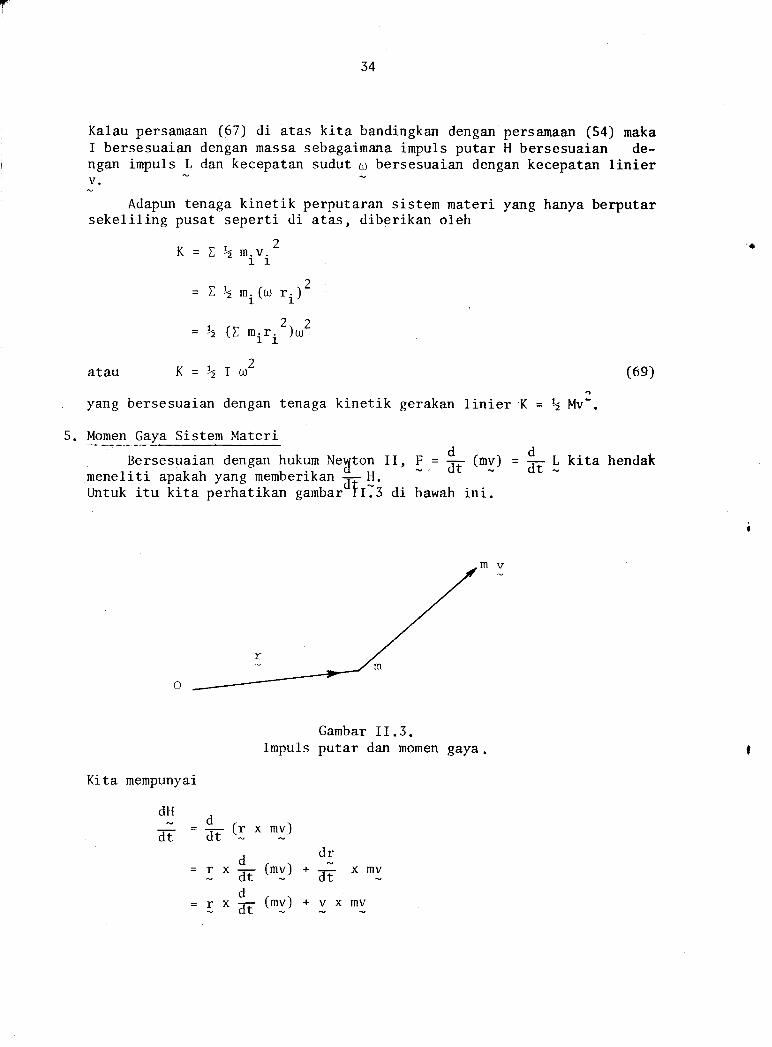
Gaya Sistem Materi
Bersesuaian dengan hukum Neytonmeneliti apakah yang memberikan !r U.Untuk itu kita perhatikan gambar"tllS
II,
di
r=$ri*r)=bawah ini.
#r
*Y
Gambar II.3.Impuls putar dan momen gaya.
Kita mempunyai
dH
ATdr
EVX
dat(I'd:*aTd
IXE
x mv)
(rY)
(*Y)
xmv
MV
35
Jadi yang memberikan-p"rirU.nLgaya r=rxF.Dengan-demikiafi , analoog denganan berlaku hubungan
dH
r=#
terhadap waktu j alah nomen
ke II, untuk gerakan putar
d=rx-'. (mv)
-dt=5*r
VXmV=mVXV=0sebab
yang dengan
l-_
Dengan demikian,
L- - -
impuls putar
hukum Newton
(70)
Adapun momen gaya sistem materi sewajarnyalah didefinisikan sebagai jum-lah momen gaya masing-masing titik materi, yakni
:=rlisehingga kita peroleh
dI-I.T'= t --1--"8
_d=Ir. xi[m.r.)-I dt r-l
mengingat persamaan (51)
.d(i* gi )*i. ,i(I .f,menj adi
)
=ixui+i.I:.(*r!,)*r {t,r d . .^l
r tg, * at (,i fr ))Akan tetapi, menurut. persamaan (52) , suku kedua ruasnol sebab
- (m. 0.. j = 0.
Lebih 1anjilt metult,t perSamaan (52) puta, suku ketiga
.gi * $7r,r;l = - ; * $r (,, !, ) = o
* $1- r,ril].
akhirnya kita tulis
pri * t {g, * $, r,, :, ,J
(71)
kanan sama dengan
ruas kanan
d+-'dt H. (G)
-1atau l=# Ic (72)
36
Dengan kata 1ain, momen gaya sama dengan perubahan impuls putar titikberat per satuan waktu ditambah jumlah perubahan impuls-impuls putarpersatuan waktu masing-masing titik nateri, terhadap titik berat.
6. Tumbukan
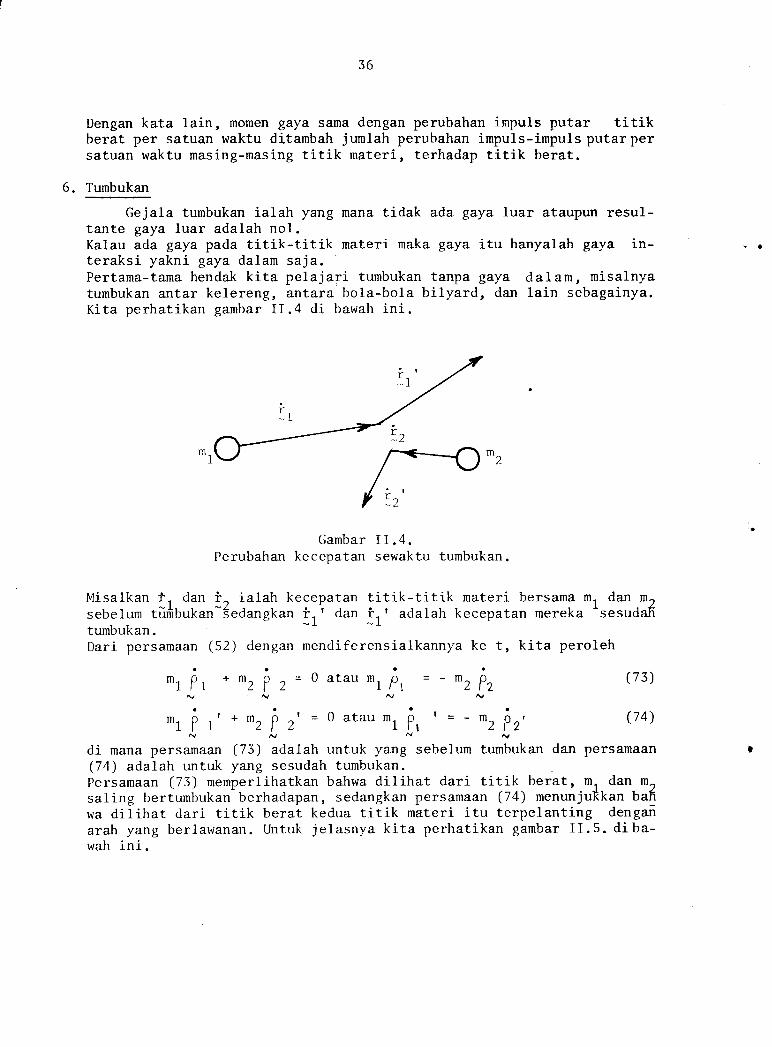
Gejala tunbukan ialah yang mana tidak ada gaya luar ataupun resul-tante gaya luar adalah nol.Kalau ada gaya pada titik-titik materi rnaka gaya itu hanyalah gaya in-teraksi yakni gaya dalam saja.Pertama-tama hendak kita pelajari tumbukan tanpa gaya da1am, misalnyatumbukan antar kelereng, antara bola-bola bilyard, dan lain sebagainya.Kita perhatikan gambar II.4 di bawah ini.
Gambar II.4.Perubahan kecepatan sewaktu tumbukan
Misalkan l, dan i" ialah kecepatan titik-titik materi bersama m,
sebelum tilfrbukan-6edangkan ir' dan irr adalah kecepatan mereka 'tumbukan
dan m,sesudah
Dari persamaan (52)
*r i, +
dengan mendiferensialkannya ke t, kita peroleh
^rir=0ataurrp, =-*rp, U3)'ryry&
(74)*r i r, * ^r p z' = o atau *, i, ' - - ^, pr,NNNA/
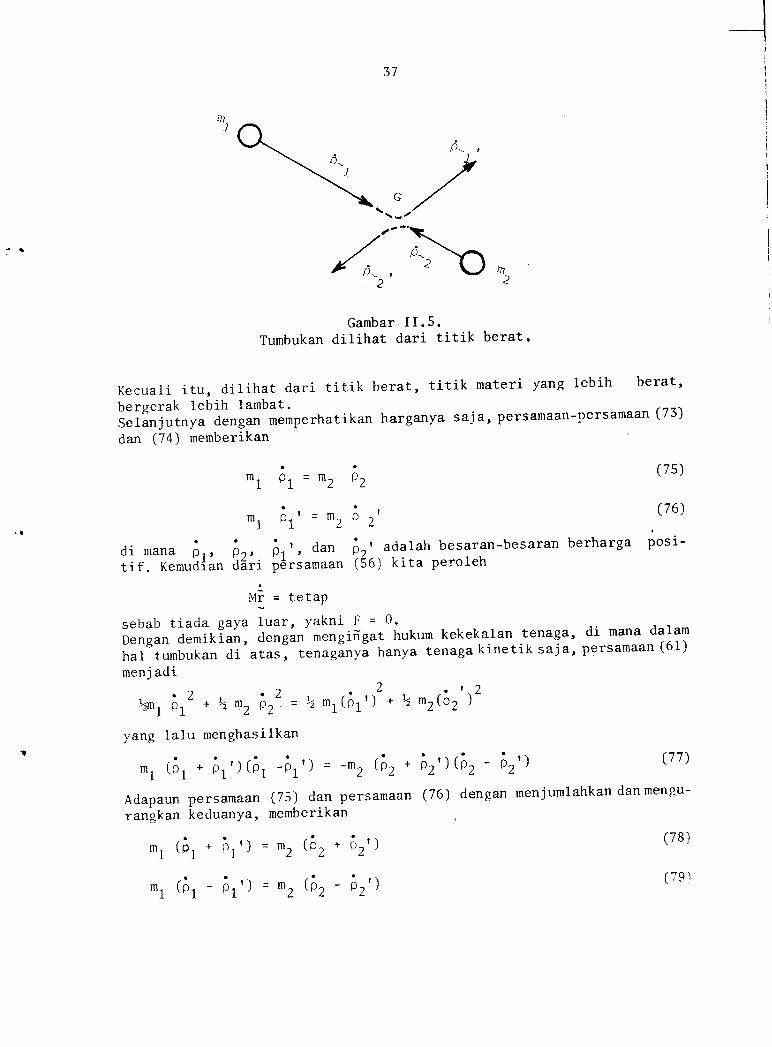
di mana persamaan (73) adalah untuk yang sebelum tumbukan dan persamaan(74) adalah untuk yang sesudah tumbukan.Persamaan (73) memperlihatkan bahwa dilihat dari titik berat, m, dan m,saling bertumbukan berhadapan, sedangkan persamaan (74) menunjukkan bahwa dilihat dari titik berat kedua titik materi itu terpelanting dengaiarah yang berlawanan. Untuk jelasnya kita perhatikan gambar II.5. diba-wah ini.
--l1
37
d,,*
G,/
./'--N.-r'. , 2 -lC2
rn2
Garnbar II.5.Tumbukan dilihat dari titik berat.
Kecuali itu, dilihat dari titik berat, titik materi yang lebih berat,
bergerak lebih lambat.selanjutnya dengan memperhatikan harganya saj a, persanaan-Dersamaan (73)
dan (74) memberikan
*1 o1=*2
*1 ir' = ^Z
di mana ;r, p.r, pr' , dan
tif. Kemudian diri P6rsamaan
Ml = t"tup
sebab tiada gaYa luar, Yakni F = 0'Dengan demikian, a"ngir'mengifrgat hukum kekekatan tenaga, di mana dalam
ha1 tumbukan di atas, tenaganya hanya tenaga kinetik saja' persamaan (61)
menj adi
4, ir' * ', m2 i22 = ', ^,yang lalu menghasilkan
. 2 - -. t-2(01') +\nr(02 )
*1 (6r * or'l to, -ir') = -*2 G, * 'or'lto, - o,
Adapaun persamaan (75) dan persamaan (76) dengan
rangkan keduanYa, memberikan
,1 (0, * 6t', = ^2 (bz *
*1 fo, - ot'l = ^2 (i, - ')
62
o
6,(s
( 7s)
2' (76)
I adalah besaran-besaran berharga posi-6) kita peroleh
') (77)
menj umlahkan dan mengu-
(78 )
(7e)
r)p2
p2
Akhirnya persamaan
.a
0, - 0. | =r_t
ataupl.*pz -6r'*02'
sedangkan persamaan (77) dan persamaan (79) menghasilkan
91 * olt= - ({,r* or')
Persamaan (80) mengatakan bahwa kecepatan relatif (yakni kecepatan nldilihat l".ri ,2. ataupun kecepatan *Z 9ilihat. dari mr) adalah tetap artilnya sesudah tuftbukan sama dengan sebelum tumbukan. -Sedangkan persamaan (81) tidak cocok dengan kenyataan, sebab p, QZ,0l,tdan pr' semuanya harus berharga positif.Lebih-lanjut, dari persamaan (75) dan (76) kita dapatkan
38
(77) dan persamaan (78) menghasilkan
_a- l9z - Qz')
n'1- =.tp.
Iyang berarti
aa
'p2
:---i- ataup2
nn,'rl tl
-=..tp^ p'.LZ
6t*P, 6tt * ,r'
(80)
(81)
pi p1
Dengan mengingat persamaan (80), persamaan-persamaan di atas akan meng-hasi lkan
Q2' = QZ dan g1t = 91
Jadi dilihat dari titik berat G, besar kecepatan masing-masingtitikma-teri tidak berubah sewaktu tumbukan, dan hanya arahnya sA.ja yang ber-ubah.
Tumbukan di mana hukum kekekalan tenaga mekanik dipenuhi, disebuttumbukan elastis, sedang sebaliknya disebut tumbukan non elastis.Dalam alam, tumbukan yang benar-benar elastis tidak ada. Tidak elastis-nya tumbukan, disebabkan oleh desipasi tenaga menjadi panas ataubolehjadi menjadi tenaga deformasi (lekukan dan lain sebagainya) dari padabenda-benda yang bertumbukan.Tidak elastisnya tumbukan menyebabkan tenaga kinetik total sesudah tum-bukan, lebih kecil daripada tenaga kinetik total sebelum tumbukan, se-hingga persamaan (80) menjadi
ot .-. o, -Qr' _* .Q2' dan
Q2 P2
P1t * Q2e = ;------=-
Pl * QZ
6r'*6r'(6r.',Besaran
(82 )

39
memberikan ukuran ketidak elasti-san tumbukan dan disebut koefisien res-titus i..Ie 1as lah bahna
0(e<l-Dengan definisi e tersebut dipersamaan {82) , merosostnya tenaga mekaniktotal sesudah tumbukan yakni
r o ) . )l f . ) . )1E - tr,
*, (or)- * '7 m2(o)'J - Lt,
mr(01')' * \ nr(or')') (83)
sudah tentu dapat dinyatakan dalam hubungannya dengan koefisien resti -tusi e.Kemorosotan tenaga dibandingkan dengan tenaga mula-mu1a, diberikan oleh
.2p) ,t
^r( br,)' + \ nr((84)
12 m" o.- *1t
AE
E
6 r, ,').'),,
^2 g2
Dalam tumbukan, meskipun tenaga mekanikkekalan impuls tetap berlaku.Maka dari persamaan (75) dan persamaanpula ditulis sebagai
total dapat merosot, hukum ke-
(76) koefisien resititusi dapat
^2
\
m /.I
Pr I P.III- Z Z
I
O+1
fl;l(' ,\ * 1) p^t
I ir,-T-
a2
(8s)
( 86)
ataum-olp.t + O.1-1 ma
LA_
m2nr^f
"2 u21
(1 *
m_l.o
^2 1
* 1) p-Z
,1
*Z ) o1' ;,1
p1m-(1 * ' ) p.
^2 r
Dari kedua persamaan di atas, jelaslah.bahwa apabila e = 1, yaitu tum-bukannya elastis sempurna, maka ert = 0, dan 01
t = p1 sebagaimana te-1ah djkemukakan sebelumnya.
Selanjutnya, penghitungan persamaan (84) iebih lanjut dengan menerap -kan persamaan-persamaan (75) dan (76) menghasilkan
40
[*, o ,')2*1
(nz , r')'*Z/lE _,
H-(mt
.)Pr)-
.)(nz P)'*1
^2
,l 1(- a _l'm1 ^2'
(mz?
)-Ot'2-1
.)(n, o)-
-1.t+l.7 1-(- +-)'m1 m2'
sehingga dengan mengingat persamaan (85) kita dapatkan
AE2:= l, - el-.
(87)
Dari persamaan (87), jelas bahwa untuk tumbukan yang elastis, e = 1 se-hingga AE = 0; ha1 ini cocok dengap kenyataan.Keadaan extreem lain ialah untuk tumbukan yang mutlak non elastis. Da-1am keadaan ini, e = 0 sehingga AE = E, yang berarti seluruh tenagamekaniknya hilang sesudah tumbukan. Untuk keadaan yang demikian, menu-rut persarnaan (82), kecepatan relatif sesudah tumbukan adalah no1; halini berarti kedua titik materi itu sesudah tumbukan, melekat satu samalain.
7. Hamburan
Hamburan adalah semacam tumbukan. Kalau dalam tumbukan yang kitabicarakan di pasal 6 di atas, kedua titik materi itu saling tidak me-ngenakan Eaya, artinya tidak ada interaksi, yakni tidak ada gaya dalam,maka dalam hamburan yang kita bicarakan di pasal ini, justru kita hen-dak membahas sifat gerakan akibat interaksi dua titik materi.Secara khusus kita pelajari hamburan oleh gaya sentral, yakni gaya ter-hadap satu titik materi oleh titik materi lain. Arah gaya interaksi ituadalah sepanjang garis penghubung kedua titik materi tersebut, sedangbesar gaya itu hanya tergantung pada jarak antara kedua titik materi itu.Lebih khusus 1agi, kita akan meninjau hamburan dengan gaya Coulomb yangtolak menolak. Jadi untuk masalah ini, persamaar (31) di bab I pasal 5menj adi berbentuk
..4^r=-3-rr
dengan a>0.
(88)
41
Selanjutnya dengan mengikuti pembahasan di bab I pasal 5 tentang hukumKeppler, kita peroleh rumus-rumus yallg sebentuk, yakni dengan menggantikan a setiap kali dengan -a.Demikianlah maka akan kita peroleh
..4V=+m rdan
E
sehingga pastilahterhadap yang lain1iskan
S
kita dapatkan
-2a=2mv +m-t
E > 0. Ini berarti bahwaadalah hiperbolik. Dari
=n'=_t_-aa
(8s)
lintasan satu t it ik materipersamaan (34), dengan menu-
u=- )t, *ecoso)h-
atau l=- \ft*ecosO) (90)'h'
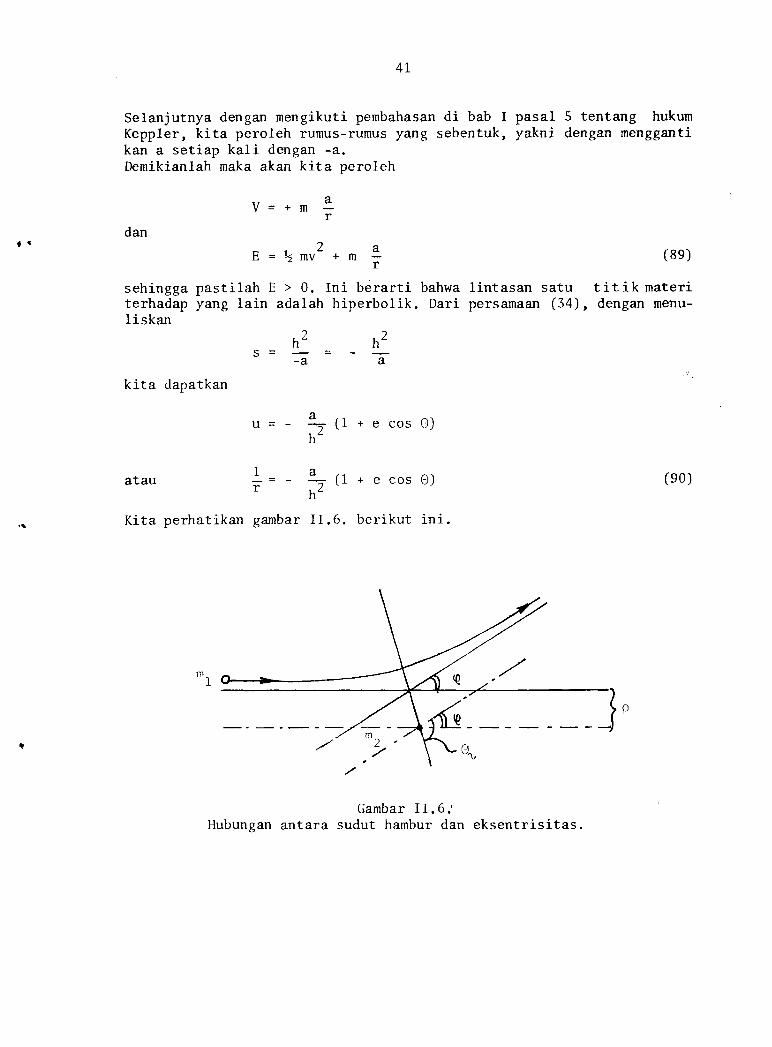
Kita perhatikan gambar II.6. berikut ini.
Hubungan antaraGambar II.6.'
sudut hambur dan eksentrisitas.
42
Menurut geometri, hubungan antara r dan o untuk hiperbola yangkan oleh persamaan (90) adalah seperti yang tertera pada gambardi atas.Arah asimptot, diberikan oleh 0 = )rruntuk T = c./) ,nurut persamaan (90)
(1 + e cos Ocn)
yang berarti
cos O-- (/)
yakni ! = o.'r
diberi-II.6.
Jadi me-
(e1)
o-- )h-
1=--e
di mana e diberikan oleh persamaan (S9) di bab I pasal 5.seandainya antara kedua titik materi m., dan m, itu tidak ada gaya inte-raksi, maka m, yang datang dari r = - rj: tidak'akan melintasi lintasanhiperbolik mel'ainkan sepanj ang garis asimptot yang berj arak p dari m ,. .Besaran p ini disebut parameter benturan (impact param6ter). SelSnjut -nyd, karena tidak ada gaya luar, maka impuls total maupun impuls. putartotal adalah tetap.
n, dipandang tetap di tem-151u mengalami pembelokan
m, terhadap m2 selaku impuls
Untuk sementara kita tinjau keadaan di manapatnya sedang m, ditembakkan ke arah m" danoleh gaya interdksi tolak menolak deng6n m_.Karenanya, kita dapat meninjau impuls putafputar yang kita pandang tetap itu.
H=P**1 ,_ c./)
di mana v_uradalah kecepatan mr yakni r, di r = -@ . Tetapi menurutpersamaan (22), impuls putar itrj adalah tebesar
P x m1 '-- = *1 h
hD=-' Y_ rn
Sewaktu di r = - @ t impuls putar itu diberikan oleh
atau
Adapun v_rn dapat diperoleh dari persamaan (89) dengan memasukkanr= -u)di persamaan tersebut. Ini menghasilkan
2"a
atau
E-1;m.I
'\/ ='6
43
Jadi kita dapatkan
P=
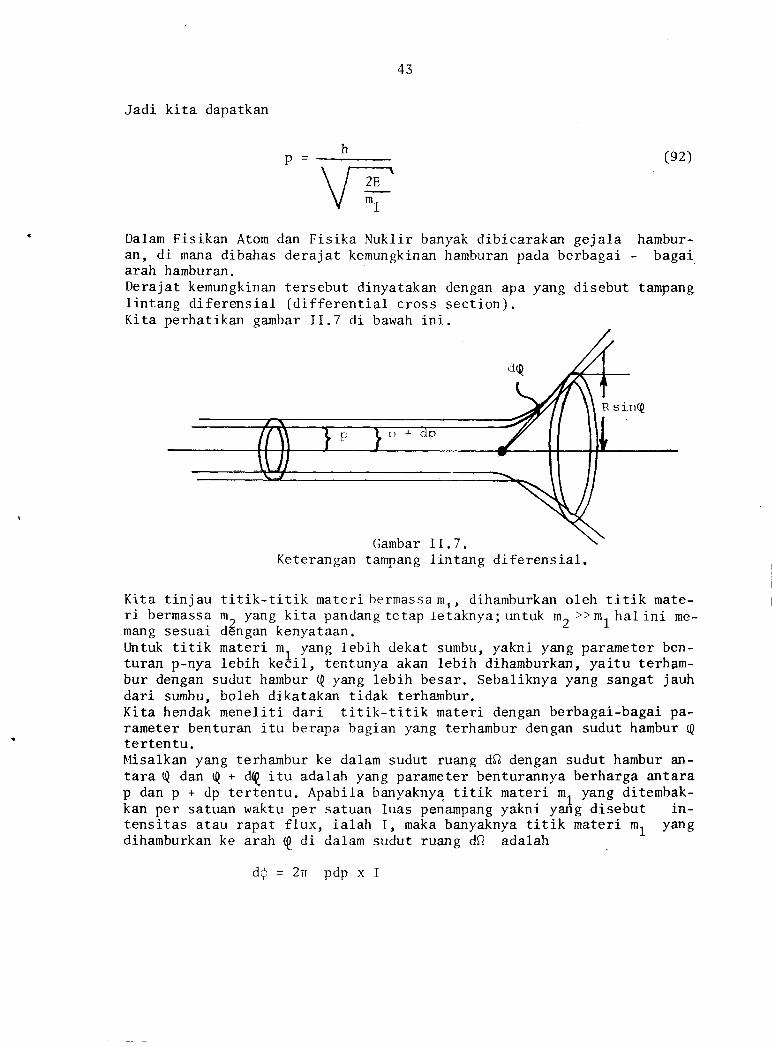
Dalam Fisikan Atom dan Fisika Nuklir banyak dibicarakan gejaladtr, di mana dibahas derajat kemungkinan hamburan pada berbagaiarah hamburan.Derajat kemungkinan tersebut dinyatakan dengan apa yang disebutlintang diferensial (differential cross section).Kita perhatikan gambar II.7 di bawah ini.
h
\ r-:1\/ /E
V11
Gambar II.7 .
Keterangan tampang lintang diferensial.
Kita tinjau titik-titik materi bermassam.,, dihamburkan oleh titik mate-ri bermast? Tz yang kita pandang tetap letaknya; untuk ^2r, m, hal ini me-mang sesuai d6ngan kenyataan.tJntuk titik materi m., yang lebih dekat sumbu, yakni yang parameter ben-turan p-nya lebih kedil, tentunya akan lebih dihamburkan, yaitu terham-bur dengan sudut hambur Q yang lebih besar. Sebaliknya yang sangat jauhdari sumbu, boleh dikatakan tidak terhambur.Kita hendak neneliti dari titik-titik materi dengan berbagai-bagai pa-rameter benturan itu berapa bagian yang terhambur dengan sudut hambur tQ
tertentu.Misalkan yang terhambur ke dalam sudut ruang dfl dengan sudut hambur an-tara Q dan tQ + dQ itu adalah yarlg parameter benturannya berharga antarap dan p + dp tertentu. Apabila banyaknya titik materi m, yang ditembak-kan per satuan waktu per satuan luas penampang yakni yafig disebut in-tensitas atau rapat flux, ialah I, maka banyaknya titik materi m1 yangdihamburkan ke arah q di dalam sudut ruang dCI adalah
(s2)
hambur-- bagai
tampang
d4,=2n pdpxI
44
di mana 2npdp ialah luas elemen luasan berbentuk cincln yang dibatasioleh jari-jari p dan p + dp.Jadi banyaknya titik materi per satuan rapat flux yang dihamburkan padaarah t{ per satuan sudut ruang, diberikan oleh
d{q)= d|/t = 2tpdp
Besaran ini sudahda sudut hambur tQ;
sial. Selanjutnya,berikan oleh
tentu tergantung pada, yaknibesaran tersebut dinamakandengan memperhatikan ganbar
(e3)
merupakan fungsi daripa-tampang lintang diferen-II.7 sudut ruang d 0 di-
dCIda
Dengan demikian
On_ (2rRsintQ). RdQ
R
2rsinQdtQ
persamaan (93) menjadi
(e4)
S(r{) =
s rQt
atau S ((t)
Lebih lanjut,
d(!ip21 =
pdpsin t( d tQ
01eh karena makin besar p maki-n kecil Q, yang berarti 9* . O, maka agar6 (Q) berharga positif, kita tuliskan "x
pdpsin Q d q
a(z p2)= d-G-Q (ss)
dari persamaan (92)
d{\ h2)E-r \
.2*1h
;7-Sedangkan Q, yaitu sudutngan pertolongan ganbar
dH (e6)
antara arah datang dengan arah terhambur, de-II.6., diberikan oleh
2tr2 n sin
45
Q= n - 2
- 20-
sehingga d cos t{
yang dengan mengingat
(n -o )(/)
1T
= d (cos 2Oc.))
= d (2 cos- 0-- 1)
= 2 d.or2 o-cD
persamaan (91) dan persamaan (39) menjadi
2h2--2 dE
'1"
(98) menghasilkan
lrdcosQ-=2ol t r-l1,.ry I
L'ru)=-l 10w
'1"Akhirnya, persamaan-persamaan (95), (96), dan
1 1 f' . 4)' ^t^2,2h2 l' C )O (tg)= l--- . *4E- --or,--.I
2Fh2 l'+-l 2l'r" J
-'1 'i6E-
(e8)
(es)
ingat hubmg-yang mengha-
yang dengan lagi mengingat persamaan (91) dan persamaan (39) menjadi
^.^'((Q) ="''*) x-+-16E- cos' Q.,
Untuk menyatakan (|-(Q) sebagai fungsi sudut hambur Q, kitaan antara {Q dengan 0o? yang dibeiikan oleh persamaan (97),s i lkan
46
cos 0q: = cos % (t( + n;
= cos (rz r{ + \n)
--sin%[
sehingga akhirnya kita peroleh rumus hamburan Rutherford
atau
2m-a
O(Q) = "'1*n x+- 16E' sin*, Q.
22m.A
1 6E-
(100)
(101)
hambur q, ti."-ini, di nana
yang diberikan
Icosec'l Q
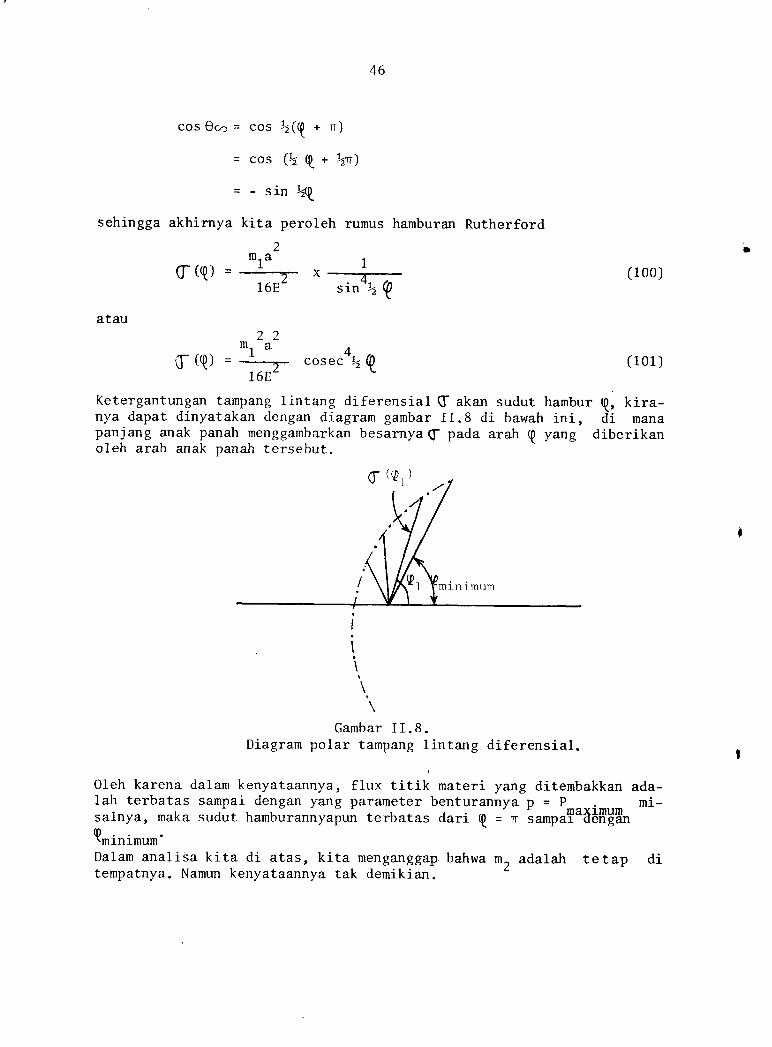
Ketergantungar tampang lintang diferensial S akan sudutnya dapat dinyatakan dengan diagram gambar II.8 di bawahpanjang anak panah menggambarkan besarnyag pada arah tQ
oleh arah anak panah tersebut.
Gambar I I .8.Diagram polar tampang lintang diferensial.
Oleh karena dalam kenyataannya, flux titik nateri yang ditenbakkan ada-lah terbatas sampai dengan yang parameter benturannya p = P_-__,*--_ mi-salnya, maka sudut hamburanny*prn terbatas dari rQ ='n sampa$'daflEB"Qminimum'Dalam analisa kita di atas, kita menganggap bahwa m, adalah tetap ditempatnya. Namun kenyataannya tak denikian.
m11nlmum
47
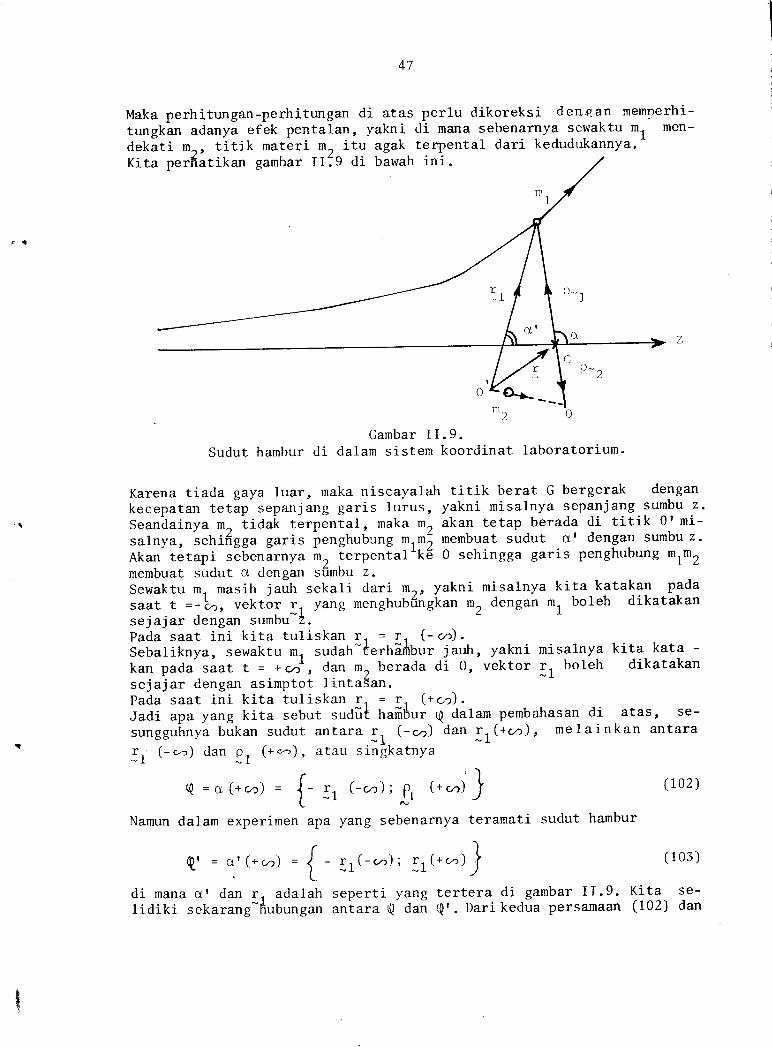
Maka perhitungan-perhitungan di atas perlu dikoreksi den.qan memnerhi-tunpkin adanyi efek pentalan, yakni di mana sehenarnya scwaktu m., men-*1 men-tungkan adanya efek pentalan,dekati mr, titik materi_mr^itu agak, terpental dari kedudukannya.Ki;;-;";frr.ir.* ganu., rtlg ai bawah ini.
p-1
rc>-__
^.2
Gambar II.9.Sudut hambur di dalam sistem koordinat laboratorium"
Karena tiada gaya luar, maka niscayalahkecepatan tetap sepanjang garis 1urus,Seandainya m? tidak terpental, maka m,salnya, sehifigga garis penghubung m.,mi
Akan tetapi sebenarnya m? terpental'k6membuat sudut o dengan sfimbu z.Sewaktu m, masih jauh sekali darisaat t =-"n, vektor r, yang menghusejajar dengar sumbu-t.
titik berat G bergerak denganyakni misalnya sepanjang sumbu z.akan tetap berada di titik 0f mi-membuat sudut crr dengan sumbu z.0 sehingga garis penghubung ,1*2
misalnya kita katakan Padadengan m, boleh dikatakan
Pada saat ini kita tuliskan r, = r, (- ur).Sebaliknya, sewaktu m, sudah-terhifrbur jauh, yakni misalnya kita kata -kan pada rrrt t = * uj, dan m, berada di 0, vektor r, boleh dikatakansejajar dengan asimptot linta5an.Pada saat ini kita tuliskan r. ; r. (*c).Jadi apa yang kita sebut sudilt hafrAur q dalam pembahasan di atas, se-sungguhnya bukan sudut antara 11 Gc) dan r, (*u>), re lainkan antara
It G ,-") dan P, (* '-) , atau s ingkatnYa
m., yaknibfngkan m,
r ,(- <r>) ; , rt* ra)seperti yang terteraantara Q dan Qt. Dari
Q = O (*rrt) =
Namun dalam experimen apa yang sebenarnya teramati sudut hambur{ ,, (-or) ; P, (. '^; }
(102)
(103)
di gambar II.9. Kita se-kedua persamaan (102) dan
Et = ut (+c.:) =
di mana cr t danlidiki sekarang
r1 adal-hubung
(
Lahan

r4B
(103) di atas, hubungan itu akan ternyatakan oleh hubungan antara"1
(*-.) d- !1 (+<.a) bersama r, (-.-).Karena dalam proses hamburan, hukum kekekalan impuls memegang perananmaka hubungan di atas diharapkan diperoleh dari penerapan hukum keke -kalan impuls.Akan tetapi hukum kekekalan impuls, menyatakan hubungan antara kece-patan-kecepatan, bukan vektor-vektor kedudukan, Maka terlebih dahulupersamaan-persamaan (102) dan (103) harus dinyatakan dalam bentuk fungsi kecepatan.I"Jntuk ini tidaklah begitu sukar melakukannya, sebab pada saat t - -6t)t!., (- -) adal ah searah dengan - r , ( - c.s) Can begitrt nul a 1., (+ct't) searahdengan :r(*q) dan p, (+v>) seafah dengan p, (*c.,cJ. -iDengan aEfrit<ian persamaan-persamaan (102) dafi (103) dapat pula ditulissebagai
Q = { !rt--r, ,, ,.-*t-Q, ={i, Gcd; ir Gr^)}
tSelanjutnya dengan mengingat bahwa padakan masih diam, dengan hukum kekekalan
(104)
(1os)
saat t = -c/), m, boleh dikata-impuls berlaku persamaan
di mana r, adalah vektor kedudukan m, sesudah terpental dari kedudukannya semull di 0r. Dengan kata I ain rl iatah vektor kedudukan m, terha-dap 01, ydfrE kita ambil selaku pusat-koordinat yang tetap.Karena yanrkita keirendaki adalah hubungan antara i,,(-u>), ir(*u>), dan
2, Gc't), maka I-r(+cn) dalam persamaan (106) haril3 dinyatltan dalamhu-tiungannya dengan'i, (*r>). Hubungan ini kita dapati dari definisi titikberat
mrt, (-ca) = *1lt Gco) * ^zlzGcn)
'rir * *ziz
-T--yang 1a1u memberikan
mlir (*czl) * ^zlzGcn)
[1 06)
(107)
r=
i (+r,; =
Kemudian, dari gambar
f1 =
yang berarti i,
IU
II.9, kita lihat hubungan
o-1
r+o-U:
=f+
49
yang berarti I f=
dan i, (+ u>) = i (*.rr) . P, (*ca)-I _ _.
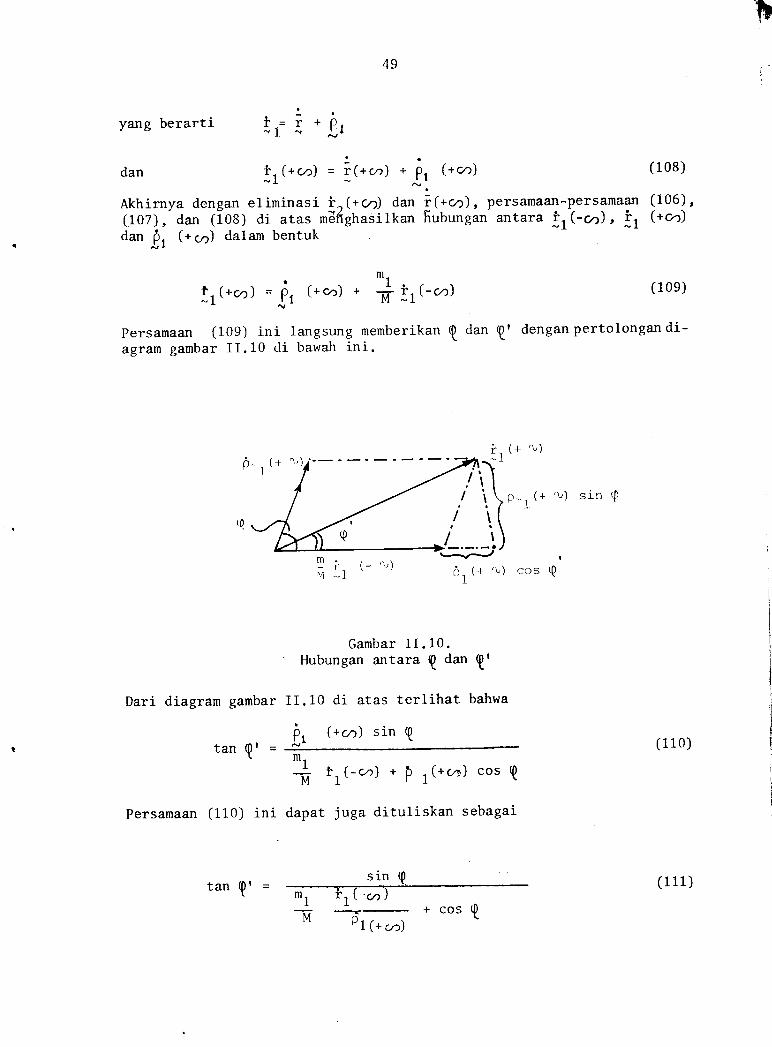
Akhirnya dengan eliminasi I"(+A) dan ! (*cr->),(107), dan (Ios) di atas mEfrghasilkan fiubungandan !t (*cn) dalam bentuk
[,l1(*o) =f, (*ca). +rtGcz>)
Persanaan (109) ,rJ ,*urung memberikan t[ dan r['agram gambar II.10 di bawah ini.
Gambar II.l"0.' Llubungan antara q d* Et
Dari diagram gambar II.10 di atas terlihat bahwa
tan (tr =8r Ga) sin tQ
+ r{-u',) * P r Ga) cos r{
(108)
persarnaan-persamaan (106),antara i1(-c.'o) ' i, (*cz:)
(1os)
dengan pertolongan di-
(+ tu)
o.-r(+ tu) sin tp
cos tQ
( 110)
*Pr
Persamaan (110) ini dapat juga dituliskan sebagai
t3:: 0r = - sin Q, *1 r!\.a)
_V '._ + cos r[9t (*r.)
( 111)
50
yang dapat lehih disederhanakan lagi bilamana pern yataan 1r (--l
dapatdisederhanakan. p, (+cr)
Ljntuk ini kita ingat akan tetapnya kecepatan relatif yang dinyatakanoleh persamaar (80) yang dalam hal ini menjadi
tr(-a) =
dengan mengingat bahwa pada saat t - - cn, m2
hingga kecepatan relatifnya adatah kecepatahDemikianlah maka dari persamaan (112) kita
i, (- rz,)(113)
O ,(+ cn)
Suku kedua ruas kanan persamaan (113) ini dapat dinyatakan sebagai per-bandingan massa-massa m1 dan m, yakni dengan mengingat persamaan (75)atau persamaan (76) atatrpun peisamaan (52) yang nemberikan
it21 *) *,.
-
P rt*ur) *z
sehingga akhirnya kita peroleh
tan (Qr =sin Q (1 14)*1+ cos (0
^2 .1
Sudut hambur yang teramati di laboratorium, yaitu Q', dikatakan suduthambur di dalam sistem koordinat laboratorium sedang sudut hambur yangsesungguhnya, yaitu q, yakni yang terlihat dari titik berat G di-sebut sudut hambur di dalam sistem koordinat titik berat. Apabila *2=*1,maka persamaan (114) menjadi
tan Q' = -i-*# q
- 2 sin lztQ cos LzQ
)1+Zcos-I1q-1
= tan !i,\Q.
Ini berar:ti bahwa hamburan yang meliputi sudut hambur dari Q = 0 sampaiQ = n itu, di dalam sistem koordinat laboratorium, yaKni yang teramati,hanya meliputi sudut hambur dari qr = 0 sampai tQ' = Y .
g, (+<-o) + itrt* ur) (112)
masih belum terPental se-aml yaltu t. Gq) .r.,_tperolen
0 ) (*crr)-1+ '-
.
61 G'n)
I
51
Jadi dalam hal ini tidak terjadi hamburan balik (back scattering) yangdiamati, artinya hamburannya paling jauh hanya sampai ke arah tegak lu-rus arah datang titik materi m.,.Adapun hubungan antara tampang'lintang diferensial di dalam sisten ko-ordinat laboratorium 6(Q') dengan tampang lintang diferensial di dalamsistem koordinat titik berat d tQl dengan nudah dapat dilihat dari per-samaan (95).Titik-titik materi yang datang dari elemen luasan 2r pdp yakni yang pa-rameter benturannya antara p dan p + dp, akan terhambur dengan suduthambur Q dalam sistem koordinat titik berat dan dengan sudut hambur Qtdalam sistem koordinat laboratorium. Dengan demikian maka dari persurma-an (95) kita peroleh
')
( rot = 7h p')d cos (l
22 d (\ p2)0 (Q') = -_-_d cos qt
sehingga 6 (,Q,) = *+#+, t( rrQt
d cos (i)
di mana #, dapat diperoleh dari persamaan (114).d cos (Q
Kita hitung sekarang merosotnya tenaga kinetik m, sesudahmengalamihamburan.Tenaga kinetik m, sesudah terhambur dibandingkan dengan sewaktu be-1um terhambur, ddlam koordinat laboratorium, diberikan oleh
,^r{G, G,,,.)}2 _
\ ^r{i, t-r-l}2atau
ir(+rn)
l1Gd j'
( 116)
tergantung pada arah hanburserta ditentukan pula oleh
Perbandingan tenaga kinetjk ini sudah tentuan Q' dalam sistem koordinat laboratorium,massa masing-masing titik materi.Dari gambar I1.10 terlihat bahwa
2a mr salnva
(11s)
)2j,{at =L
t,
-j l'lr I
tLll!
i
(
1ott
r, ( +'u) , ^,+,.",it*,1M
):, +.i
)
l" Ii1(-tu)r -rtu'( *'u) ,1 cos (fl
52
yang menghasilkan
{r,r'*r f _ 1brr.1}'
in-;*' {r{-,7, {irGd}' ^?, z^l
a = -r12 C. t= a cos Qr
ltrt_aj
2m t, (tca)+ -fr f{-6r cos Qr
2,1
M-
yang dengan nengingat persanaan (116) dapat pula dituliskan sebagai
Suku pertarna ruas kanan persamaan (Ll7) harus kita eliminasi dengan me-nyatakannya dalan fungsi massa titik materi rn, dan mr. Hal ini dapat di-lakukan dengan menerapkan persamaan (112) dan^persanSan (75) yang lalumenghasilkan
t1(- ^') " ,t M
= 1 t
-=o, t* r) ^2 ^z
yakni
a-
P1(+ tu) ^2
=;1- ") - Fr-
Dengan demikian persamaan (117) rnenjadi
(117)
21ffi.L/
d -
--M.
m_
{acosq'
pa.os q'
ill-Dt
Q'- -M ^ =o
2,1
-+ t
M-
atau ,2
(mr+ mr) (m, - mr)
M2
,2-11---T-
m
-2a+
+2
m_I+2 g.- acos[r
(1 18)
\
53
Persamaan (118) ini menghasilkan
u=p cosQ':
a=+ cosQr+
? ml-^lcos- qt *
-,,-
2*r.
7i, (*crr)
Oleh karena a = adalah besaran positif, maka harga a yang se-tt (-c4)
suai dengan kenyataan adalah yang diberikan oleh
(1 1e)
Keadaan khusus nisalnya ialah untuk'1 = '2' untuk keadaan ini' persa-
maan (11.9) nenjadi
a=costf
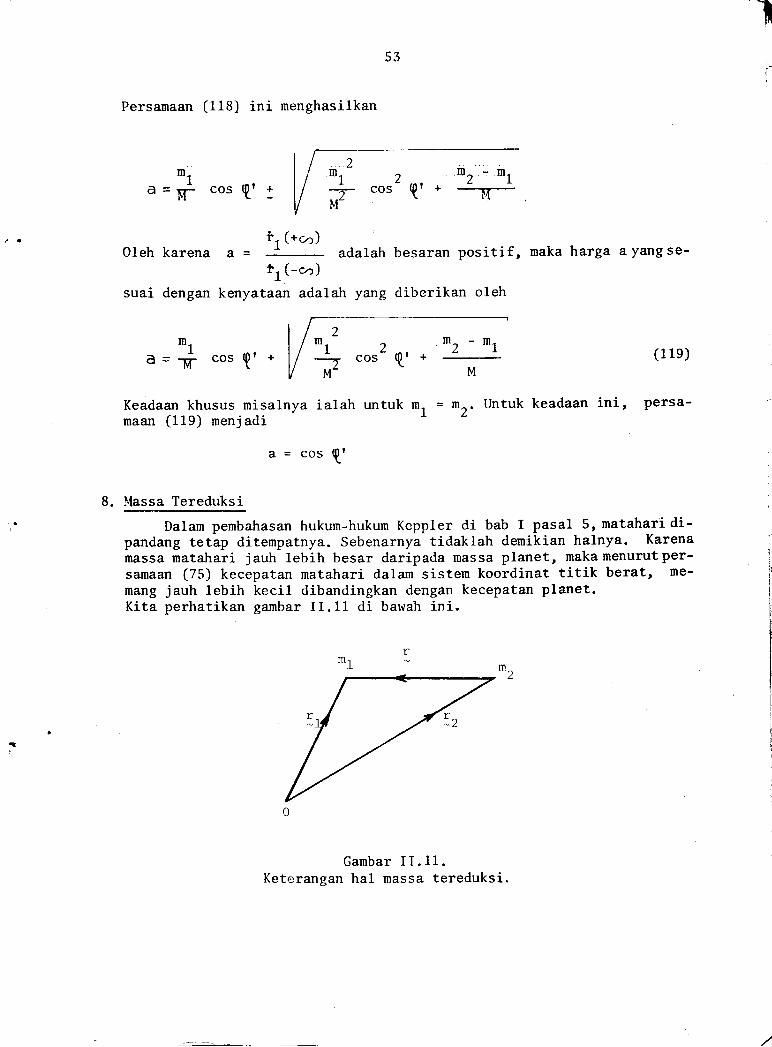
8. Massa Tereduksi
Dalam pembahasan hukurn-hukum Keppler di bab I pasal 5, matahari di-pandang tetap ditempatnya. Sebenarnya tidaklah demikian halnya. Karenamassa matahari jauh lebih besar daripada massa planet, rnakamenurutper-samaan (75) kecepatan natahari dalam sisten koordinat titik berat, me-mang jauh lebih kecil dibandingkan dengan kecepatan planet.Kita perhatikan ganbar II.L1 di bawah ini.
Gambar I I. 11" .
Keterangan hal massa tereduksi.
2m
L
-aM-
54
Misalkan m, ialah, planet dan m, adalah natahari dan vektor kedudukan mlterhadap m) adalah L
I=L-Iz (120)
(L2t)
Dalam pembahasan hukum-hukum Kepoler di atas, di mana m, dipandang te-tap kedudukannya dan diambil sebagai pusat sistem koordinat 0, kita tu-lis persamaan gerak m, terhadap m2 sebagai
I=*riPersamaan ini berlaku hanya apabila m, tetap.Pada hakekatnya persurmaan gerak m, teihadap 0 adalah
r*
Maka terhadap matahari, m2, persamaan geraknya yang tepat dapat.dituliskan sebagai
f=rrir
=Ur
-!=*z lz
T
misalnya, di mana p ialah massa pengganti m, agar gaya gravitasi F da-pat menyatakan percelatan ml terhadap mr; U'ini disebut massa tereduksi.Kita hendak mencari berapakih harga p t6rsebut.Persamaan gerak matahari m, terhadap 0 adalah
Tandanganialaholeh(t23)
1
u
Massa tereduksi pkan massa planetKeppler di atas.
minus ini berhubtrngan dengan hukum Newton ke III reaksi = aksi de-arah reaksi berlawanan dengan arah aksi di mana sebagai reaksinyagaya tarik m., oleh m, sedang sehagai reaksinya ialah gaya tarik n,
m.r. Demikianl6h dari persamaan-persamaan (120) , (727), (722), dafidengan mudah kita, peroleh
(123)
(124)
ini dipakai sebagai massa terkoreksi untuk mengganti-dalam persarnaan-persamaan pada pembahasan hukun - hukum
11-+*1 *Z
55
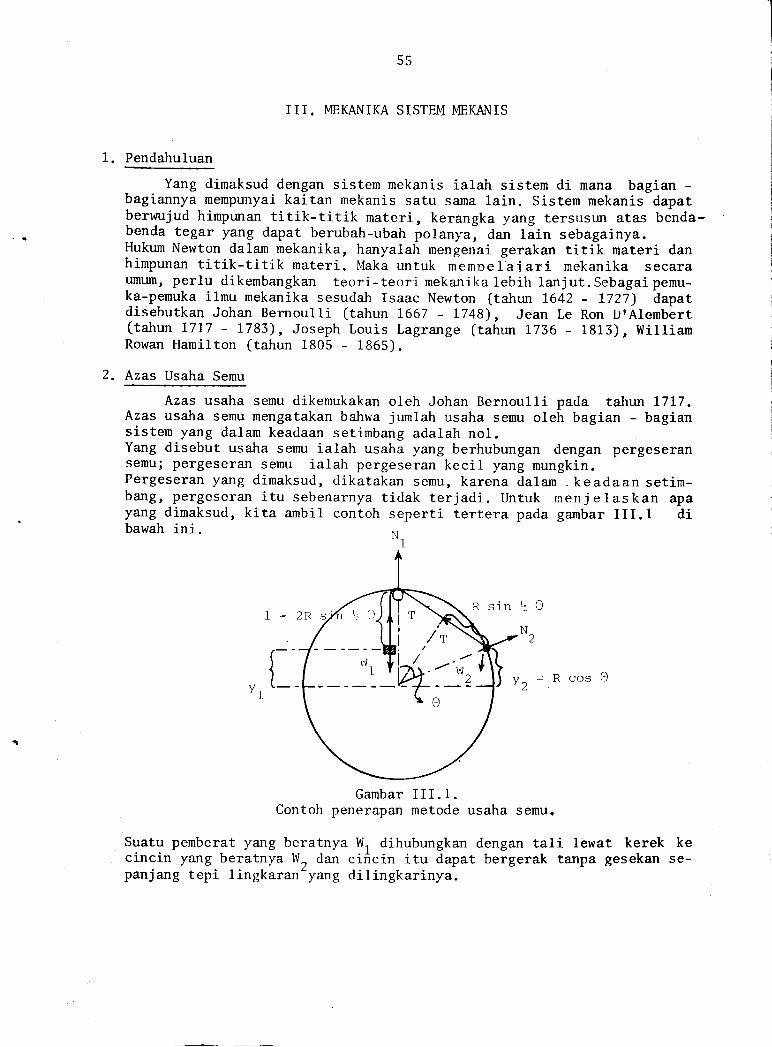
III, MEKANIKA SISTEM MEKANIS
1. Pendahuluan
Yang dimaksud dengan sistem mekanis ialah sistem di mana bagian -bagiannya nempunyai kaitan mekanis satu sama lain. Sistern rnekanis dapatberwujud himpunan titik-titik nateri, kerangka yang tersusun atas benda-benda tegar yang dapat berubah-ubah polanya, dan liin sebagainya.Hukum Newton dalarn mekanika, hanyalah mengenai gerakan titik materi danhirnpunan titik-titik materi. l,laka untuk mempe l'ai ar j mekanika secaraumum, perlu dikembangkan teori-teori mekanika lebih lanjut. Sebagai pemu-
\1,pgmuka ilnu mekanika sesudah Isaac Newton (tahun 1642 - 1727) dapatdiSbbutkan Johan Bernoulli (tahun L667 - 1748), Jean Le Ron l-rtAtembirt(tahun 17L7 - L783), Joseph Louis Lagrange (tahun L736 - 181s), wirliamRowan Hamilton (tahun 1805 - 1865).
2. Azas Usaha Semu
Azas usaha semu dikemukakan oleh Johan Bernoulli pada tahun L7L7.Azas usaha semu mengatakan bahwa jumlah usaha semu oleh bagian - bagiansistern yang dalarn keadaan setimbang adalah nol.Yang disebut usaha semu ialah usaha yang berhubungan dengan pergeseransemu; pergeseran senu ialah pergeseran kecil yang mungkin.Pergeseran yang dimaksud, dikatakan semu, karena dalam keadaan setim-ba.g, pergeseran itu sebenarnya tidak terjadi. untuk menjelaskan apayang dirnaksud, kita anbil contoh seperti tertera pada gambar Irr.1 dibawah ini- nl
l-LrO
N2
=RcosO2,, {_.
Gambar III.1.Contoh penerapan metode usaha semu.
Suatu penberat yang beratnya W., dihubungkan dengan tali lewat kerek kecincin yang beratnya W, dan cificin itu dapat bergerak tanpa gesekan se-panjang tepi lingkaran'yang dilingkarinya.
""fi ')'+:5r
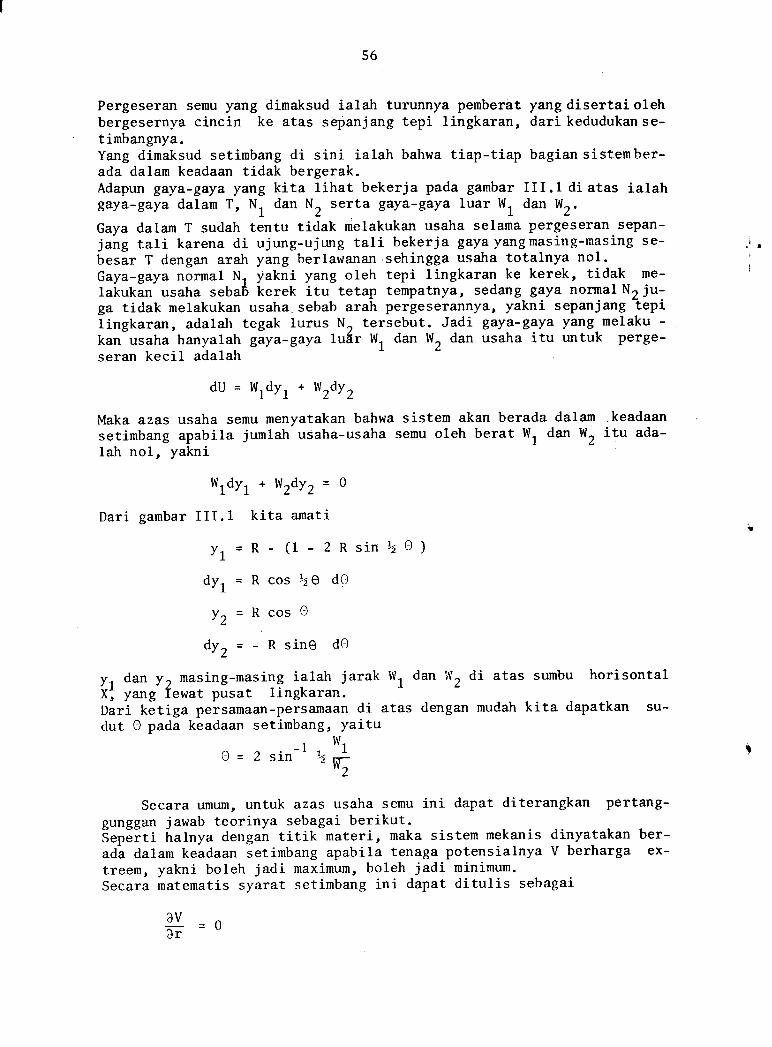
56
Pergeseran semu yang dimaksud ialah turunnya pemberat yang disertai olehbergesernya cincin ke atas sepanjang tepi lingkaran, dari kedudukan se-tirnbangnya.Yang dimaksud setimbang di sini ialah bahwa tiap-tiap bagian sistember-ada dalam keadaan tidak bergerak.Adapun gaya-gaya yang kita lihat bekerja pada gambar III.1 di atas ialahgaya-gaya dalam T, N1 dan N, serta gaya-gaya luar lrr, dan Wr.
Gaya dalan T sudah tentu tidak melakukan usaha selama pergeseran sepan-jang tali karena di ujung-ujung tali beketja gaya yangmasing-masing se-besar T dengan arah yang berlawanan.sehingga usaha totalnya nol.Gaya-gaya normal N., yakni yang oleh tepi lingkaran ke kerek, tidak me-lakukan usaha seba6 kerek itu tetap tempatnya, sedang gaya normal N2 ju-ga tidak melakukan usaha. sebab arah pergeserannya, yakni sepanjang tepilingkaran, adalah tegak lurus N, tersebut. Jadi gaya-gaya yang melaku -kan usaha hanyalah gaya-gaya lufr W, dan W, dan usaha itu r:ntuk perge-seran kecil adalah
dU=WrdI7*WZdY2
Maka azas usaha semu nenyatakan bahwa sistem akan berada dalam keadaansetimbang apabila jumlah usaha-usaha senu oleh berat W, dan W, itu ada-lah nol, yakni
Wtdyt +Wrdyr=0
Dari gambar III.1 kita amati
It=R-(1-2Rsinro)dy1 R cos LO d0
Y2 = R.cos 0
dy. -Rsino d0
y.r dan y, masing-masing ialah jarak W, dan'i\12 di atas sumbu horisontalXl vans lewat Dusat tingkaran.Xl yang t pusat lingkaran.Dari ketiga perszrmaan-persilmaan di atas dengan mudah
dut 0 pada keadaan setimbang, Yaitukita dapatkan su-
.I^I_o=2sin_r%*f
Z
Secara umum, untuk azas usaha semu ini dapat diterangkan pertang-gunggan jawab teorinya sebagai berikut.Sep"iti iralnya dengan titik materi, maka sistem mekanis dinyatakan ber-adi dalan keadaan setimbang apabila tenaga potensialnya V berharga ex-treem, yakni boleh jadi maximum, boleh jadi minimum.Secara matematis syarat setimbang ini dapat ditulis sebagai
H -o
trrI
1
57
Menurut hukum kekekalan tenaga mekanik tersebut di bab I pasal 1 di atas,turunnya tenaga potensial adalah sebanyak usaha yang dirakukan, yaitu
-5v= 5u atau 5v=- 5u
Dengan demikian, syarat setimbang di atas dapat pula dituliskan sebagai
- P= o atau p = floT dryang lalu menghasilkan
$u=o
Adapun diferensial usaha oleh -gaya-gaya pada sistem mekanis adalah
5u = r 5u. = r 5 5r. = r F.. 5r., a.i 1 -l_ -1Maka syarat setimbang untuk sistem mekanis adalah
6u = r p.. 6:, = o
Di lain pihak, jumlah usaha oleh gaya-gaya dalam adalah nol sebab gaya-gaya dalan secara berpasangan saling menghapuskan. Jadi dengan singkatkita dapat merumuskan azas usaha semu
(L2s)
"h
:
n
t
' Ir(') ,:, = o
yang berarti jumlah usaha masing-masing bagian sistem oleh gaya luaradalah nol.Perlu diperhatikan di sini bahwa pergeseran 5;., masing - masing bagianberkaitan satu sama lain yakni tidak sembarang.
3. Azas DrAlembert
I
ItII
i
I
Dalam nekanika titik materi kita kenal hukum Newton ke Ir
-ddI=;r(my)=;E !=!dan dalam mekanika sistem materi, dari persamaan - persaxnaan ( s4 ) dan(56), kita dapatkan
f =rfi= # _L=Ma
Persamaan ini tidak dapat diterapkan untuk sistem mekanis, sebab ki-ta_mengenyampingkan pengertian titik berat dalam sisten mekanis. LagipuIa, untuk sistem mekanis gerakan masing-masing bagian adalah bel'kai tan
Fr
58
sehingga sukar untuk menyatakan gerakannya dengan meninjau gerakan ma-sing-masing bagian, sebab pada masing-masing bagian tidak hanya bekerjagaya luar tetapi juga gaya-gaya dalan yang boleh jedi cukup rumit. t'lakatimbul gagasan oleh DrAlenbert pada tahun 1743 untuk nenyatakan gerakansistem mekanis dalam kaitannya dengan gaya-gaya luar, seperti halnya de-ngan azas usaha semu, dan berubahnya impuls per satuan waktu untuk ma-sing-nasing bagian.Llntuk masing-masing bagian, sudah tentu
.{,F. =-1
1.-1
dm
Tetapi pada umumnya,
F. (1) t
-1
Nanun dari azas usaha semu di pasal 2 yang dirunuskan oleh persa-maan (125), tidak setimbangnya sistem berarti ada perubahan impuls padamasing-masing bagian, yang berarti
, Ir(r) 6:, =
sehingga berlakulah hubungan
5t L=i,
r 1..-1
5r.-1
r(Ii( ) - .1r).9 r, = o (126)
Persamaan (L26) ini ialah pernyataan singkat azas DfAlembert. Perumusanazas DrAlembert ini sebentuk dengan azas usaha senu Bernoulli, untuksyarat kesetimbangan, hanya di sini terhadap gaya luar tiap bagian sis-tem, harus dikurangkan dengan perubahan impuls per satuan waktu dari ba-gian itu selaku penyetimbangnya.Perlu diperhatikan bahwa persEilnaan (126) berarti
r F.(1) = r i.-1 -1
namun bukannya
F. (1)
-1= 1.
-1
Untuk jelasnya kita ambil contoh soal di pasal 2 dengan nemperha-tikan kembali gambar III.1Seandainya pemberat W, ditambah, sisten yang tadinya setimbang menjaditidak lagi setimbang.dan W, T"l?i bergerak turun sedang W, mulai me-luncur ke atas sepanjang t6pi lingkaran.
\
59
Maka menurut azas DfAlembert, berlaku persamaan
(Ir.dlt - *rir.d:r) * (Tz .d!z - ^z!z.d:) - 0
l3 lf-^111.-Tz,.,i"1ah massa pemberat yang beratnya w, dan massa cincinyang beratnya-lVr.
1:::f.:l_1f_1{ wr.pada saat t) = O' dari saat 0 = O^, dapat diperoreh9-erga mengrntegrarkan persamaan di atas, dengan meng?ngat hal_hal ber_ikut '
w, a{n - rr - 2R sin u o)l
WZ d (R cos 0)
an
2eng
*.r-R
akn
alnaya
d
P
I\v
ho
!
It . d_.t = W1dy1 =
Yz'dJz = w2dY2 =
)4mv
yakni
=Q
keuntungannya dengan azas DrAlembert sepertisemu, ialah tidak usahnya diperhitungkan gaya-bagian sistem, sehingga memudahkan perhitungan.
4. P-e.rsamaalr Lagr.ang_e
Pada umumnya, seperti pada contoh di atas, trans'formasi koordinatsering diperlukan. Pada contoh tersebut, transformasi itu ialah darisistem koordinat Cartesian X - Y ke sistem koordinat polar yang meli -batkan sudut 0 . 01eh karena pergeseran satu bagian sistem berkaitan de-ngan pergeseran bagian lain, misalnya pada contoh di ataspergeseran {:,berkaitan dengan pergeseran dr,, maka untuk memperoleh variabel-varia Ibel yang tidak berkaitan satri Sama lain seperti halnya 0 pada contoh diatas perlu dilakukan transformasi.
Pada umumnya transformasi dar.i sistem koordinat rr, r. t Tzt tke sistem koordinat qr, g2, q3 t dapat dilakukariderig6n frBnyatakan
.Ii = Ii(Q1, Q1 Q, t) (\27)
dvvdrvm'a:={mffi.0*r=Jry.{r=
tan ]t, selalu sama dengan kecepatan W,ena IVf dan It, bersambungan.
o ke ^u= 0r ' akan menghasilkan
hru'i . {-rro(cos o, - cos oo) - brr' }
\O'- sin ,rOo) wr(cos Or - cos a.rll'-o ))
-l *i.di = Ju mua-o
mengingat pula kecepa= vl = v misalnya, kargintegralandariO=O
R sin LrO, - sin L6n) -
nir 2R t-.| -" llrr-(sin[ *r* ^?. 1'')adi jelaslah bahwa
nya dengan azas usahaa dalam rnasing-masing
tttII
60
sehingga
3r.-1
tr3r. Dr.
- -1 ryII
-
O. + a--J dq. -'j dt
J
Marilah kita bentuk persamaan (126) azasdinat (q, . g, e, . . .) .
Menurutkdn p6rsdmaan transformas i (L27) ,
Dr.I F..dr. - I I F. . ,.-t dq. = f,-r - 1 1 J -1 ngj 'J J
denganEr.
- -1H---!1 oQ.
''l
Q. ini lalu disebut gaya umunr (generalized force) yakni seakan-akan adalth hasil transformasi gaya F dari sistem koordinat (r., r, I. . . . . .) kesistem koordinat (q, e, Q. . . .). Adapun transformasi ifrci6m6ilt pergeseran dr. sudah tentu dib6ri(an oleh
-1
dr. - r ili dq.,jDai.J
Selanjutnya dengan persamaan (130) ini kita dapatkan
i..a..-I - 1
dr.-1 tV' = r!-' =
ur dr J
do . Dr.tu1+-*
dt dt
V. =-1(128)
DrAlembert dalam sistem koor-
kita dapat menulis
O.do..J .J
(t2s)0. = tr'1 1
= m.i..dr.t-1 - 1
Dr... --1= m.f ,. L--'-1-1 dcl .I 'r
= *, i {*. ,.,
= *, I {*.
tr'
ouj
tsr.-ftir oo,
b ri.)or'
D ti.
,0,'
. ar.- ti u- , ;q,]oo,
- Yi :. ,{fi J oo, (131)
I
6L
Kemudian dari persarnaan (128) kita dapatkan
Dr.&1m=&l.J ,J
Persamaan (132) ini hendak kita pakai untuk substitusi
pertama ruas kanan persamaan (131), sedang untuk sukupersamaan (131) kita tulis
.2d r..Lqr - E*ilJT-l
dv.-t
1..dr.-l- -1
3r.*'1-m
'3
kedua
(Ls2)
pada suku
ruas kanan
a= ---n--
cjo.,)
sehingga persamaan
* (4 ,*(x;J
(+)(i31)
- fa aYi
i { at tYi' ao.J\ ')
(,ar^.r.2, I 11d t:at \ oej
3v.,.1=...-.tr-do.'l
menj adi
]= m.
1
1
d
)--l
uojDv.*1
'-Tq.'l
-r2 \'i Ia*t
D%mt-i
ooj (r33)
di-
yakni( 1.3a)r
(13s)
Persamaan (135) ini bersama persirmaan (129) akhirnya nemberikan peru-musan azas D rAlembert persamaan (1,26) dalam bentuk apa yang disebtrt persamaan Lagrange
rli o,J'oj-o (134)
dengan K = I ,grru12 sclaku tenaga kinetik sistem..ladi perso.*uo., l*!rung" tak lain ialah persamaan DrAlembert yangtransformasikan ke sistem koordinat umum.Apabila koordinat-koordinat q. tidak tergantung satu sana.lain,berarti bahrva sistemlya adalah'apa yang disebut holonomik, persanaanmenj adi
5 =Q.,qj.JdaK._
-dt do.,)
62
Agar tenaga kinetik K dapat ditliferensialkan terhadap q dan 8, '2 perluditransformasikan sebagai berikut'Dar:i persamaan (128) kita dapat mentrlis
2 /a" ':i) ,/51 A r lit)'i" = Yi'Yi =
!(ro; u, . ri ) ' i['f; Qt * er-)
= I lrt H;ejQ,, *' 3 irtqj .(F)'
sehingga tenaga kinetik K = i ''r''2 menjacii
w-t- \- ! r m ali
l: Dr' Er'
^- 2 ,i,) i *r"\ ET- ajar* :, l*t # fri qj
Br, Z
+'i ), m.f ..l-)' / '. 'i\at /
Apabilarnedang,ayanyi..sedemikianhinggadapatdinyatakansebagaiminus graclian ,u"ir"pltensial, maka persamaan (129), dapat dilulis se-
bagair
15r.
Io, u uj i lr, q ,\ (rj
= f I F.. !r.^r u -1J1
='6v
yang 1a1tr member:ikan
A, .,\I
Qi=- 6-.'' (lr
sehingga -iikalau V tak tergantung t, persamaan (135) menjadi
d ,6L. 6Li. ( io,) - 'ui; = (1 36)
63
rI
dengan
L=K-V
L, disebut furtgsi Lagrange dan persamaan (136) dikenal sebagai persama-an Lagrange yang dikemukakan pada tahun 1788. Persamaan Lagrange inisangat bermanfaat untuk merumuskan persamaan gerak sistem bilamana te-naga kinetik dan tenaga potensial sistem dapat dirumuskan.Sebagai contoh misalnya kita ambil osilator harmonik yakni suatu titikmateri yang bergetar secara harmonis.Tenaga kinetik dan tenaga potensial osilator harmonik, diberikan oleh
(=
y =\kxzlrlaka fungsi Lagrange-nya adalah
.') )L = Lz mx' - !5 kx'
bL-ir = mx
dand .dLat tErJ=mx
br,
-=-Kxox
.)
"nn x
sehingga
atau
persamaan geraknya diberikan oleh
mi+kx=0
km
yang lalu menghasilkan
x = A cosrot + B sinot
dengan
(r)=
Apabila di dalam sistem koordinat q tidak semua variabel koordinatnya bebas terhadap yang 1ain, maka persamaan (136) sudah tentu tidakberlaku dan harus dipakai persamaan (134). Tetapi persurmaan ( 134) itu
64
menyangkut penjumlahan sigma sehingga runit penyelesaiannya. Maka perludiciptakan rumus yang sebentuk dengan rumus (136) yakni yang tidak me-nyangkut penjunlahan sigma untuk sistem yang tidak sepenuhnya holononikitu.Misalnya dari n variabel eu e, ez e-, m variabel di antara nere-ka bergantungan satu sama taini yafrg berarti variabel bebasnya hanya sebanyak n - m buah. Maka m variabel yang bergantungan itu selalu dapatdinyatakan sebagai kombinasilinear n-m variabel bebas tersebut.Maka kaitan holonomik (holonomic constraint) nya dapat dinyatakan dalambentuk sistem persamaan simulatan
.tr 6 gl* ^tz6qz * a1n 5Qn=
u2t 6 o1 ^22 6 9z +a^ 6o -0zn 'n
'rnl 691 *am2dqz
atau secara singkat
nr- ,d dL
,t= , tit t uE' -
+a 6o -0mn 'n
n
t"tj
O Oj = 0 dengan k = l, 2,3 (Ls7)j=1
Dari ni persamaan ini hanya ada m variabel yang dapat dicari, dan m va-riabel itu akan ternyatakan sebagai fungsi linear n - m variabel yang1ain, yang kita sebut variabel bebas tersebut. Selanjutnya, karena sis-tem tidak sepenuhnya holonomik, persamaan Lagrange-nya dari persanaan(134) menjadi
:i,l uoj_o (138)
Tujuan kita sekarang ialah mengubah persamaan (138) menjadi bentuk ho-lomonik seperti persamaan (136).Untuk ini Lagrange berpaling ke l)ersamaan kaitan holonomik (137) yangterdiri atas m persamaan itu. Persamaan pertama dikalikan dengan trr, kedua dengan trr, dan seterusnya lalu dikombinasi linearkan dan ditan6ah -kan ke persaffaan (138).Jelasnya adalah sebagai berikutKita bentuk persamaan
11"1n u Qr, =Ir*rr 6 q1 xf tz 5 e2
65
xz^zt oor*\2^zz uor* \2^2n %=o
Imaml o o, _ tr*ar2 u o, * I*.r, Qr, = o
Ke m persamaan ini lalu dijumlahkan dan diatur menjadi
(trtrrt * \z^21+..... trio"rnt) UO, (Ir.tz * \2122 + ......
trr"r2) u'0, *
+ (tr-a + ..... trr"*)6 er, = o-Imn
Persamaan ini lalu ditambahkan ke persamaan (tSg) dan diatur nenjadi
+ ...
. { *r , }h, 3h, * (r la1n + -.. tr,",n) 6q,,
-0
atau secara singkat
,!,{#,3#,, h. i, rn'rj} o o' = o (13e)
Kenudian dipilihlah apa yang lalu disebut. Lagrange multiplier tr1, .)'2... .-l - itu sedemikian rupa [ingga masing - masing suku pada p6rsamEan(139) adalah nol, yakni
d ,EL. a-L * f tr-a-. = flh,rqr- aqj k=1 x"kj=o (140)
untuk i = L,2,.... n.
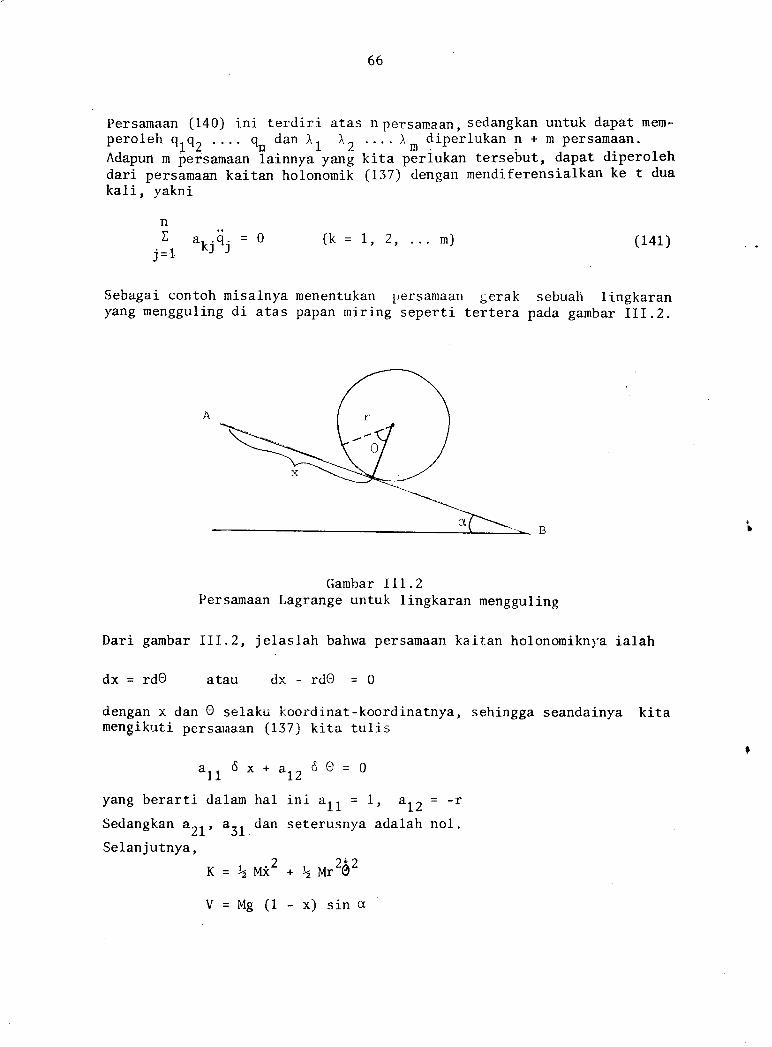
66
Persamaan (140) ini terdiri atas n persamaan, sedangkan untuk dapat mem-peroleh qrq, go dan l, x2 .... l, diperlukan n + n persanaan.Adapurt m feisanaan lainnya yang kita perlukan tersebut, dapat diperolehdari persamaan kaitan holonomik (L37) dengan mendiferensialkan ke t duaka1i, yakni
nr a..6. - o
j=l KJ'J
$ebagai contoh misalnyayang mengguling di atas
(k = 1, 2, m) (141)
sebuah lingkaranpada gambar III.2.
menentukanpapan miring
persamaan gerakseperti tertera
Gambar III.2Persamaan Lagrange untuk lingkaran mengguling
Dari gambar III.2, jelaslah bahwa persamaan kaitan holonomiknl'a ialah
dx = rdO atau dx - rd0 = Q
dengan x dan 0 selaku iloordinat-koordinatnya, sehingga seandainya kitamengikr:ii persarnaan (137) kita tulis
u11 6 * * ul2 6 0 = 0
yang berarti dalarn ha1 ini all = 1, aL2 = -tSedangkan
^2L, ^Sl dan seterusnya adalah nol.Selanj utnya,
K = \tt*2 * ,1,ft262
V=Mg(1 -x)sincr
67
rI
dengan mengingat momen enersianya
I = Iulr2
dan dengan mengambil V = 0 sewaktu lingkaran menyinggung dasar yakni ti-tik beratnya berj arak r dari dasar.Dengan demikian maka fungsi Lagrange-nya adalah
L = Lz M*2 * ti MrZ 62 - Mg(1 - x) sin cr
sehingga persamaan (140) memberikan
-d , 6L, ata. ( t.") - T. + I = 0
ax
ftt3tr 3t-)r=oyang menghasilkan
Uii-t'tgsino,+I=0
:.,tr20 -Ir -oSedang persamaan kaitan holonomiknya, dengan menerapkan persamaan (141),menghasilkan
i=16yakni
I=tdsehingga akhirnya kita peroleh
i = \ g sin o
A=Lrfsino). = 1.i l.,lg sin o
5. Azas Hamilton
Menilik miripnya persamaan Lagrange ddngan persamaanEuler Lagrangedalam kalkulus variasi
d af- afa;(er,) a, _u
yang berlaku untuk suatu kurve grafik (x,y) sepanjang mana
{t {{*,r,r' = 5{, dx
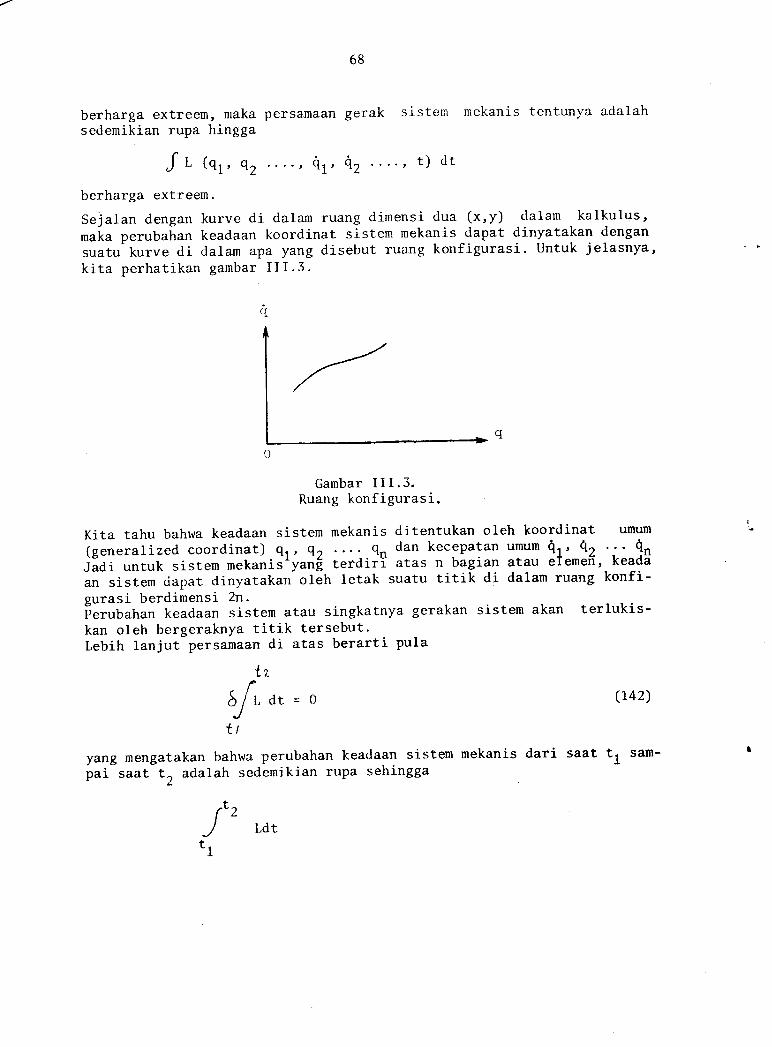
68
berharga extreen, maka persamaan gerak sistern mekanis tentunya adalahsedemikian rupa hingga
J t (e1, e2 9L, 12 t) dt
berharga extreem.
Sejalan dengan kurve di dalam ruang dimensi dua (x,y) dalam kalkulus,,n"k" p".rbahan keadaan koordinat sistem mekanis dapat dinyatakan dengan
suatu kurve di datam apa yang disebut ruang konfigurasi. Untuk jelasnya,kita perhatikan gambar III.3.
Gambar III.3.Ruang konfigurasi.
Kita tahu bahwa keadaan sistem mekanis ditentukan oleh koordinat umum
(generalized coordinat) 91, 92 . ...- Qn dan kecepatan umum 9L' 4Z ',1--iljiai ,r,trk sistem nekanis'yanfi terdirT atas n bagian atau elemen, keada
an sistem <iapat dinyatakan-oteh letak suatu titik di dalam ruang konfi-gurasi berdimensi 2n.Ferubahan keadaan sistem atau singkatnya gerakan sistem akan terlukis-kan oleh bergeraknya titik tersebut.Lebih lanjut persamaan di atas berarti pula
tz
5/l at = o
tt
(142)
yang mengatakan bahwa perubahan keadaan sistem mekanis dari saat t, sam-
pai saat t, adalah sedemikian rupa sehingga
rtzJ Ldttt
I
69
berharga optimlun (extreer:r). Pernyataan ini ,.iiiremukakan oleh Hamiltondan lalu disebut azas Flamilton, yang tak lain ialah azas variasi dalammekanika-Azas Ilamilton ini sudah tentu berlaku sama di clalam sistem koordinatCartesian, sehingga tentunya dapat pula dijabarkan dari azas DrAlembert.
o . 8Sl -t ele ryn_q : q r !g1tl_t o n !3i_r_i_ {, g1_!l A_lSglSftBaik azas DrAlembert, maupun persamaan Lagrange, ataupun azas Ha-
milton dan persamaan Hamilton yang akan kita pelajari kemudian, masing-masing merumuskan secara umum, gerakan sistem mekanis umumnya (termasukpula gerakan titik materi selaku sistem mekanis yang paling elementair).Maka antara mereka tentu ada kaltannya satu sama 1ain, misalnya yang sa-tu dapat dijabarkan dari yang lain, dengan yang kurang fundamental da-pat dijabarkan dari yang lebih fundamental, sedangkan yang sama tingkatfundamentalnya, dapat saling dijabarkan dari yang satu ke,yans 1ain.Di 1rasa1 6 ini kita hendak menjabarkan azas Hamilton dari azas DrAlem -bert. Sebagaimana dirumuskan oleh persamaan (126), azas DrAlembert ada-lah berdasarkan variasi dlferensial, sedangkan sebaliknya azas Hamiltonadalah berdasarkan variasi integral.Maka pengintegralan persamaan (126) tentunya ak-an rnenghasilkan runusazas tlamilton persamaan (142).Pengintegralan persamaan (126) akan menghasilkan
(1) 6r.dt =ru1
Di lain pihak, untirk ruas kanan,
t
"r1
- F.L -'l
.i.t-1= Im.i.1-1
t2
{t1
t *rr,. E *i{ 6ri) - i.. ot. I at,r)d _.
dt (Ii
6r.-1
t)
l"t1 t1
t)-f'
t1t fr(t). 6 r.dt =
ta
J r m. i.'. . 6r. dtt1 & ]"-1 ry1
Ruas kiri persamaan di atas tak lain ialah integral increement usaha da-ri saat t = t, sampai saat t = t), sedangkan di bab I pasal 1, incree-ment usaha = 6erkurangnya increefrent tenaga potensial; atau dirunuskan
t.)6u dt = .[
' - 6v dtt1
t
"rt1
kita dapat menulis
t){r.dt = [-- t1
t.,JLM 6i. dt
-1
70
Suku pertama ruas kanan adalah no1, sebab harga r, pada saatterhadap nana sistem mekanis ditiniau adalah tert6ntu, yaknisedang suku kedua ruas kanan adalah
"tro r.-1
dan t,= 0,
tz- I I m.i../r 1-1 6i. dt = -
-1,.i.2'r dt7-t'
t^rZJ t u(',t1
denganDengan
tenaga kinetikakhirnya kita
6(x-v)dt=o
6K dt
Ldt=0
t.)
= (' _
,!sistem.peroleh
K ialahdemikian
n'2Itlyaitu
t^fzJ 6Ldt=o atautr.
sebagai berikut.Dengan mengingat
6L=f,|t-o".+ro9i r1
maka persamaan az.a.s !iamilton
"t,l---aLJ (tr;:6 q. + rt1
t^f z -atI L-v do.t1 '1
Untuk suku kedua
^t"J I Nl-a6oIt1
aL r .n+ U Q.o9i
(142) menghasilkan
aL " d.) dt = oa:-- u '1',ei
nt2I ar. ^6q.dt. 1 ,q; a(6qi)-o
ruas kiri kita dapat menulis
rtz - D, nt2qi) = -J t d(;hoor) J -rdai
tl ' t1
ti'z. !"n:g!g3!_Ig:eyg." _t:granse lef:-aret Hami lton
Dengan mudah kita jabarkan persamaan Lagrange dari azas Hamilton
ar-H-r
\
7T
$. (6rr) at =3r, rat; uQi
t t.lz - f '"1. ti
dE
t2
Tt1
16 6qi
t1 dan t,t6rsebut- 5li
' , *6 q.dt -ft' , udei '1 tl
dQq dT
, {*. ,3t, h}'-,
Lagrange umum (termasuk yang non ho-
-0
atau
t)r' - dLI L-v do-t1 '1
yang lalu menghasilkan
t,f ' - aL, r;;- 6q.dt-o-
J oQit1
dengan mengingat bahwa pada saatyang berarti pada saat t1 dan t,
t
f1
yang lalu menghasilkan persamaanlomonik)
L = K=iI
s. Bllrlg_ I"tg_99" :g':geelHery_1lelDi atas kita mendefinisikan ruang konfigurasi sebagai ruang yang
sistem koorclinatnya ialah koordinat-koordinat umum 91, 92 Q' dan
kecepatan-kecepatan umum q1 , gt qr.,.
Akan tetapi, slbenarnya datam fiekanik'd, besaran impuls (atau nomentum )lebih p"tting daripada kecepatan, sebab keadaan dinamis sistem mekaniskecuali ditentukan oleh koordinat-koordinat kedudukannya q1q? ...... q,.,
juga ditentukan oleh keadaan impuls masing - masing elemefl.-l{aka kitefr"uaat mencipt.akan apa yang disebut ruang fase yang sisten koordinatnyaialah koordinat*koordinat umum dan impuls-impuls umum (generalized mo-
menta). Tetapi sebeiumnya kita harus terlebih dahulu mendefinisikan im-puls umum P.kita tin3au sistem mekanis yang paling sederhana yaitu misalnya himpun-an titik-titik materi bebas, aitlnya tiada interaksi satu sama lain.DaIam ha1 ini fungsi Lagrangenya adalah
.22 m.v.- 11
,-uq,"*r ,HJ o.
r3fr a.
mengambil harga tertentu= 0. Jadi
,Pql, dt = o

72
sehingga impuls materi ke i ialah
n.v. = aL1 1 avi
Maka kita hendak mendefinisikan impuls umum sebagai
D - aL'i - fri (143)
Selanjutnya, kita hendak menyatakan tenaga total sistem dalam hubungan*nya dengan koordinat umum dan impuls umum, bersama fungsi Lagrange. Diatas kita telah mendefinisikan fungsi Lagrange sebagai
L=K-Vsedangkan tenaga total sistem adalah misalnya
H=K+VDari kedua hubungan ini dengan eIi-minasi V, kita dapatkan
H=2K-LJadi langkah berikutnya, kita hendak menyatakan tenaga kinetik sistem K,dalam hubungannya dengan koordinat umum dan impuls umun. Untuk ini de-ngan mengingat persamaan (130), kita menulis
.,K - L 'nm.v.'11
1
= ,, L, mt t 1l-d arl'
Dari persamaan ini, kita perolehEr. Er.r,K \. ,S 1 1
a il = ', *i (' 5-q. qjJ tq.I r 'l - ')
sehingga ^ tsr. Er.
i u, 3t = t, ,r( tj rd qj)( r aq orl
Dr.= f, m.(I ^--f ,l'i I j 'qj
=2K

73
atau
2K= ro. ?S-j') oaj
Apabila tenaga potensialnya Velemen sistem, maka
aK a(K - v)a*ql = -il-) ')
sehingga akhirnya kita peroleh
H- rq. ?!-. 'r do.)"'-l
tidak tergantung pada
AL=r- do..J
hubungan
L
kecepatan elemen
1
II
yang dari persamaan (143) menjadi
rl= I piqi-L (144)J-
Tenaga total H yang dinyatakan dengan rumus (144) ini disebut fungsiHamilton (Hamiltonian) .
Jadi sekarang kita dapat nenyatakan tenaga total H sebagai fungsi ko-ordinat umum, impuls umum, dan waktu t, atau singkatnya
H = H (p, q, t) (145)
Kita sekarang hendak menjabarkan persamaan gerak sistem di dalam ruangfase.Dari persamaan (145) ki.ta dapatkan
dH = ;3il; dp, I 3Ht'" . Fo'Akan tetapi menurut persamaan (144)
dl-l= | pioqi* Iqrdpt-dL11
dan
dL= r .p_i oQi
Sehingga dengan mengingatmengingat pula persamaanoleh hubungan kanonik
AL ALoQi i m; oQi * 6-t- ot
definisi impuls unum yakni persamaan (J.46) danLagrange (136) akhirnya dengan mudah kita per-

74
Qi=
p. =^1
AH
5;.t1
AH-_-oQi
(146)
yang 1a1u disebut persamaan HamiIton.Persamaan gerak menurut Hamilton ini berbentuk persamaan diferensial or-de satu yang berarti tentu lebih mudah penyelesaiannya j ikalau diban-dingkan dengan persamaan Lagrange yang berbentuk persamaan diferensialorde dua itu.Perlu diperhatikan di sini bahwa agar dapat menerapkan runus Hamiltontersebut, fungsi Hamilton H harus terlebih dahulu dinyatakan sebagaifungsi p,, e. dan t. Jadi misalnya q, harus dinyatakan dalam p.. Untukmenjelastan,'kita ambil contoh gerakin perputaran titik materirol.eh ga-ya sentral gravitasi. Llntuk ini kita ambil sistem koordinat polar (r,0).Tenaga kinetiknya kita peroleh dari persamaan (2)
11 = ! mt.i
= 2 miz + 1< m tr6)2dan tenaga potensialnya, diberikan oleh persamaan (43)
V-
sehingga fungsi Lagrangenya adalah
L=K-Ve ) ) o)
='4fltt +timtU +m
Jacli menurut persamaan (143) impuls umunnya ialah
pr
dLL' - ---'e a0
.)- mur
dan fungsi Lagrangenya dinyatakan dalam impuls umum nenjadi
Pga^lrlmr
sehingga Hamilton-nya, dari persamaan (144), menjadi
a-m r
ar
p-ZM
2PO+ ----+m.)zmt
2
/Pr_ I ---\2m i),=Pri*Po6
\
75
yang menurut persamaan di atas untuk p* dan p^, i dan 6 dapat dinyata-kan dalam hubungannya dengan p. dan Pa'lakni I
rPoqPr0- "=dani=-
^r' m
sehingga akhirnya kita tuliskan fungsi Hamilton dalam bentuk
pr Po fr'* Po' rm t\n-Pr m *Po ;z \;. ,*r,
+m i)22
= ', *'o=-*"2m Zmrz r
dan berlakulah persamaan Hamilton
2
p-=-P=- G2Po **1-)dr '-2*.5 lLz
=m(62r_ l"l,T"
r[' yang berarti
'l
"i .
IIII
.. !2 amr = m., .- * 7Hasil ini cocok dengan hasil dari persamaan (31), sebagaimana yang kitaharapkan.Selanjutnya persamaan Hamilton juga menghasilkan
.aHPo=- # =skarena H tidak rnengandung 0.Hal ini sesuai dengan apa yang kita harapkan, yaitu
P6 = tetaP
atau
^Or2 = tetap
sebagaimana dinyatakan oleh persamaan (22).
76
Jadi dengan cara Hamilton, mula-mu1a dituliskan fungsi Lagrange-fry?, lalu dari fungsi Lagrange dicari impuls umumnya, dankemudian fung-si Hamilton-nya dinyatakan dalam fungsi koordinat umum dan impuls umumdengan menyatakan kecepatan umum dalam impul uiltum.Cara Hamilton ini memang berkepanjangan dan ticiak praktisuntukmemecah-kan masaalah yang sederhanaNamun cara Hamilton ini ternyata menjadi penting untuk mendasari per-kembangan iLnu Fisika teori misalnya dalam mekanika kwantum dan teorimedan.
9. Koordinat Siklik dan-Cara Routh
Pada contoh soal di pasal 8 di atas, kita dapatkan pa =0 yang ber-arti p..' tetap, sebab persamaan Hamilton-nya tak menganduig variabel 0.Di laiX pihak variabel O ini berhubungan dengan perputaran maka disebutkoordinat siklik dan untuk koordinat siklik ini, impuls pasangannya(conjugate momentum) yaitu po adalah kekal atau tetap (conserved).Pada umumnya, suatu koordinat q disebut siklik apabila koordinat ter-sebut tak terdapat dalam fungsi Lagrange dan fungsi Hamiltonnya, danuntuk koordinat siklik ini, impuls pasangannya adalah keka1.Untuk koordinat siklik, 95, persamaan- Lagrange (136) memberikan
,*o )-o=oyang dari definisi impuls umum persamaan (143), la1u menghasilkan
yang berarti p* tetap, tak tergantung waktu, dan hanya inilah yang di-hasilkan oleh persama.an Lagrange.Di lain pihak, persamaan Hamilton (146), meskipun agak berkepanjangan,memberikan hasil yang l"e'r;ih, yakni kecuali p, tetap, juga dapat diper-oleh q, dari hubungan
Jadi untuk koordinat y'ang siklik, penerapan i)ersamaan ilarailton lebihmenguntungkan daripada penerapan persilmaan'Lagrange. l'{aka Routh memakaicara gabungan, yakni dengan memakai persamaan Lagrange untuk koordinatyang non siklik, dan memakai persamaan Hamilton untuk yang siklik.Karena cara l"lamilton hanya akan dipakai untuk yang siklik .Saja, makadalam penulisan fungsi Hamilton-nya, untut I pial cukup dituliskan un-tuk yang siklik saja.Fungsi Harnilton yang demikian memang bukan fungsi Hamilton yang sebe-narnya dan disebut fungsi Routh (Routhian)
dAT
dat D =0's
r ll li(l = ---.s Dp.
I
77
Fungsi Routh ini yakni
R=Ind -L^s's(147)
penjumlahan sigma-nya hanya meliputi ),ang siklik saja, lebihdaripada fungsi Hamilton, namun dapat sepenuhnya menggantikan
Hamilton dalam penerapan persamaan Harnilton untuk koordinat yang
dengansingkatfungsis ikl ik,
_6R--6;ts
Untuk jelasnya kita ambil kembali contoh soal di pasal 8.Maka dalam soal tersebut kita tulis
R = pod - (r2 mtz * ,< ,16212 * ,n +)Dari perszrmaan (143) kita dapatkan
aL : 2Po =5ti- =rL)r
dan karena 0 adalah siklik, maka pa
o = ,Oa2
atau
dan
sebab.6H6Rqr=6r=QatnPr- 6H
6Q,
I
tetap = q, misalnya, sehingga
2a-r +mFJR = o oZ - (\ntzmr
^2 ')lt . L= -_;- - lrrnf * 't
I -'mr
:cr"2mr
1L.0,
-,i - ,)Lmr
). CI,'4fii -TT
m r.2
0*; +mmr *)
. .z'jmr - m
,0-Z
mr
yang kita tuliskan <li atas.
a7
Jadi
0AR
3cr
II
III
1i
iawp. T:mur
T" t. le93 I 1991
cocok dengan apa

78
10. Pen abaran Persamaan Hamilton dari Azas variasi Hamilton
Dari persamaan (144)
11 = I Piqj - L
yakni
tentunya persamaanton yang diberikan
L = I p.d. - H'J'lHamilton dapatoleh persamaan
Ldt=0
dijabarkan' dari(142)
(148)
azas variasi Hamil-
t,
'J't1
Dari persamaan (142) ini kita tulis
l at =J6 L dt
= .f a(r n3r; - H) dt
6t
Kita tinjau
6(pjqj)=pj6qj*ej6Pj
Karena persamaan Hamilton bersangkutan denga' U :i6 pj, *utt O Qi harus diubah ke bentuk 6Oj yak
6Qj=!+ = *r (6qj)
sehingga selanjutnYa
*
di sanping dengandengan nenuliskan
D. 0 0. =') 'Jpj
dat
dAT
dP.(ojoor)-6qj.+
6 qj) - ej u oj
dar t0 qj)
(rj
79
!zpj 6 q.) dt - J, (t nj 6 q.)dt*t ,'t)
(-o
4jot = .1t2
=[ d
tt
-r-f''''6
dan
maka
dan
Karenatulah
(r pj 6 qj) (r Pj o a3)dtj,t1
(--J(rpj6q.)dt
n di atas adalah nol, sebab divariasi, yaitu U Oj 0 di t =
serta mengingat pula
t)pjuoi I
"1
kanan persamaatidak diadakan
rhitungan ini
-DH I* L
-
0 O.oQj 'J
dan persamaan
pj] o. ,(,
6n, dan 6qj
J{' (nj . ftr ' o:}
persamaan ini dipenuhi
AHo.--=Q'-r dD.- ,J
.aHqj = EF;
_F_L
suku pertama ruasdant=t2memangt = t.t.mengifigat hasil pe
6 H = r $L o o.oPj ^J
ya persamaan (148)
Jf 'u, - 3t' u
leh karena variasi.aruslah
J{' (oj . ffi,, 6
Adapunt=t.t- dafr_1Dengan
(142) menghasilkan
(rj . |t,u r, Jat = o
satu tak terganlung yang
rn
0h
akhi
1ain,
Jo.=opj
-0
oleh sembarang harga P5 dan Q, maka ten-
z
atau
80
dan
atau
atau
dan
D. * 5= o'l oaj
Pj= AHq11. Transformasi Kanonik dan Persamaan Hamilton-Jacobi
Persarnaan Hamilton tidak langsung memberikan penyelesaian yangtunta! sebagai q = q(t) dan p = p(t) kecuali kalau niisalnya diketahui
4r=ft=o, suatutetaPan
sehingga dengan mengintegralkannya, diperoleh qi = qi(t) dalam bentuk
Qi=oit*Bi
tlaka dapat dipikirkan kemungkinan nengadakan transformasi dari ruangfase (q, p) te ruang fase (Q, P) yang lain sedemikian rupa hingga didalarn ruang fase yang baru, didapatkan Q, = cxi YanB tetap.Agar a din p aaafatr koordinat umum dan-imputs umum di dalam ruang fa-rL y.rg baru, maka transformasi itu harus sedenikian rupa hingga ben-tuk kanonik persamaan Hamilton tetap berlaku, dan transformasi demiki-an disebut transformasi kanonik.
J
Misalnya transformasi itu dari qt n" Q:.
p1 ke P, untuk impuls umun yang bersang
Karena persamaan ini dipenrfii oleh sembarang harga P, dan q, maka ten-tulah J '3
untuk koordinat umum dan dariutan.
. aHo:-E
. aHQ.i = T;l" ,J
.. aHPj.q
AHq
-0
=Q
atau
ij= -
I
B1
1L. Transformasi Kanonik dan Persamaan Hamilton-Jacobi
Persamaa:r Hanilton tidak langsr:ng memberikan penyelesaian yangtuntas sebagai q = q(t) dan p = p(t) kecua'1i kalau mlsalnya diketahui
Q, =P=o. suatutetapan'1 dPi r
sehingga dengan mengintegralkannya, diperoleh qi = qi(t) dalam bentuk
=o.t+B.t-1
Maka dapat dipikirkan kemungkinan mengadakan transformasi dari ruangfase (q, p) ke ruang fase (Q, P) yang lain sedenikian nrpa hingga didalan ruang fase yang baru, didapatkan Qi = oi yang tetap.Agar Q dan P adalah koordinat umum dan impuls unum di dalam ruang faseyang baru, maka transformasi itu harus sedemikian rupa hingga benttrkkanonik persamaan Hamilton tetap berlaku, dan transformasi demikiandi-sebut transformdsi kanonik.Misalnya transformasi itu dari q., O" Qi tnrtuk koordinat umun dan darip.i ke P,. untuk impuls umum yang -bersafrgkutan.idaka di^ dalam sistem koordinat yang baru yaitu sistem koordinat (Q,P)tetap berlaku hubungan
DH*aPi
DH*5q
jika H* ialah ftmgsi Hamilton di dalam ruang fase yang b.aru. Perlu di-perhatikan bahwa neskipwr seandainya e, p, H di dalam ruang fase lanaadalah besaran koordinat, impuls dan tenags, Q, P, H* di dalam ruangfase baru boleh jadi bukan besaran koordinat, impuls dan tenaga dalamartian fisis. Andaikata Q, P dan H* kebetulan memang tetap mertpakanbesaran-besaran koordjpl:t., ir4ruls dan tenaga, yakni nisalnya transfpr-masi itu ialah transf,ormasi sistem koordinat secara linear, maka sudahbarang tentu dalam ruang fase yang [ra;:u, p*rsamaan llanilton tetap ber-laku yang berarti trs"nsformasi itu pasti kanonik. Namun yangkitabahasdi sini adalah transformasi yang lebih umum, bukarurya hanya transfor-masi sistem koordinat. Ilengan transformasi tlmum ini, padaumumnya hasiltransformasi koordinat adalah fungsi impuls lana maupun koordinat lama,dan begitu juga hasil transformasi impulsnya. Atau secara singkat kitarumuskan
Q=Q(q,p,t)
qi
Qi=
D-r.].
I
J
P=P(9,p,t)
( 14e)
82
Di pasal 10, kita menjabarkan persamaan Hamilton dari azas variasi Ha-milton, secara matematis murni, tanpa menghiraukan gejala fisinya.Maka di dalam ruang fase (Q, P) yang baru, tentr,rnya juga berlaku azasvariasi Hamilton yang diberikan oleh persamaan (L42) dan dengan fungsiLagrange L yang didefinisikan oleh persamaan (148).ivlaka baik di dalam ruang fase baru niaupun di dalam ruang fase lama ber-laku persamaan-persamaan
, -j'ti,
t.
,-[t1
([ piQt - H)dt = o1
Dengan demikian pengintegralanhubungan
Io.d. - H - Io.O. - H'r'a '1 '1 't
*fu. =
PiQr-H*)dt=o
kedua persamaan ini akan
dFI-'dt
dF =6 -0
(1s0) .t
(xi
menglrasi lkan
dengan F ialah suatu tetapan integrasi, dengan rnengingat
f= tz
tr.
F=F1(qQt)
F=F2(qPt)
FIt-
t^
ul''t.
t
,'26J
tl
sebab pada saat t = t, d* t = t, tertentu antara mana integrasi di-lakukan, harga variabdl-variabel - q, p, Q, P, t adalah tertentu, yak-ni 6 q, 6 p, 6 Q, 6 f, 6 t adalah no1 sedangkan 6 F adalah fungsi de-ferensi al -de ferensi al tersebut .
Setanjutnya, F memang merr:pakan fungsi variabbl-variabel Q, P, Q, P,t. Tetapi mengingat hubtmgan-hubungan pada dua persamaan (149), maka Fcukup dinyatakan sebagai fungsi 5 - 2 = 5 di antara 5 variabel itu,misalnya
atau
( 1s1)
t
83
atau
F=rS(pPt)
atau
F=F4(pQt)
Lebih lanjut, agar F mengandung informasi tentang bentuk fungsi trans-formasi dari sistem koordinat lana ke sistem koordinat baru, maka di-pilihfah F yang mengandtrng variabel di dalam kedua sisten koordinat,seperti halnya persamaan (151) di atas.Jadi misalnya kita tak akan memilih
F=F(pqt)
dan
F=F(PQT)
Dengan demikian fungsi F yang diberikan oleh persamaan (151) di atas,diharapkan dapat menentukan ftngsi transformasinya, dan disebut fungsigenerasi (generating function) . Dari fungsi generasi ini tentunya dapatditentukan hubungan variabel-variabel .
Misalnya untuk
F = F1 (qQtl
dF -0Fr aF-. ^5i=;#0,.i;.1 i,.3-f
sehingga persamaan (150) merrjadi
DF, aFtlpiai - r{ = IoiQ' - H* + r r+ i, * t e, a, . fatau
EF., EF, aFXpiqi - l{ - IPiQi + HI - t rO, ei - I 5ga, - et = Q
Karena q diln Q dalam F, adalah variabel-variabel bebas, dan begitu pu-ta .ii dan Q, yakni dafat berharga sembarang, maka kofaktor q- dan Qidalaft persafit-an di atas tentulah sana dengan nol, sehingga persanaafldi atas menghasilkan
84
aF_1
U. -._'1 d q.'1
aF_D _- I^i- a 0.
OF,H*=H. #
EFz
[ls2)
Persamaan (152) ini menberikan jalan untuk nenentukan variabel-variabelyang tak terdapat dalam Fungsi generasi yakni p dan P dengan mendefe-rensialkan ftrngsi generasi terhadap variabel-variabel bebas yang adadalam fungsi generasi yaitu q dan Q.Dengan jalan yang sama, tentunya untuk
F=F2(qpt)0F, 0F,
kita dapat nrenentukan Q dan p dari ,-= dan *: .
Namtm cara di atas tidak dapat begitu saja diikuti untuk F, (q P t),sebab persanaan (151) yang kita libatkan itu hanya mengandr.fig suku-su-ku dengan q- dan P. sedangkan yang kita butuhkan ialah suku - strku yangnengandtmg ' Qi ' dan p1. Maka kita ambil suatu akal dengan menulis-Kan
Fr(t P t) = F, (t Q t) + IPIQi
yang lalu memberikan
k
dF _a '2 aFZ : EOZ
m= feq. qi * i eq.tt * -a.-
aF. aF. aF"= I ,r, o, . i Tq, a, . e* * IPiQi * IPiQi
yang bersama persamaan (150) seperti di atas lalu meng[asilkan
!
Pi= q
\
85
Qi
H*
Qi=EFs
m.-1
3Fs
qaF-
J+-'at
(ls3)
(1s4)
3Fz
aP.1
Demikianlah dengan cara
kita tuliskan
OF,=H+--: dt
seperti ini, untuk
= Fr(P P t)
o. = -'1
H*=H
p=
C
Fo(n Q t)
F4(PQI) = Fr(qQt) - [Piei
aF.lLn-'i a0.
Fr(n P t) = F1(q Q t) - IqiPi + xQ.P.
yang lalu nenghasilkan
Sedangkan untuk
qiengan rnenuliskan
Kita peroleh
AF,a =- 4 (155).1i 3pi
3FoH*=H*Ef

B6
Dari persamaan-persamaan (152) sampai dengan [155] jelaslah bahwa apa-bila fungsi transformasinya tak mengandung t, maka F tak merupakanfirngsi t sehingga H* = H.Dari uraian di atas, jelaslah bahwa ftmgsi generasi F rnertpakan kuncipenyelesaian persamaan gerak. Tetapi untuk memilih dan menentukan Fyang berarti memilih dan menentukan fungsi transformasi, merupakan na-salah tersendiri yang tidak mudah. Hal ini akan kita bicarakan kemudi-an, dan sebelunnya akan kita ambil contoh untuk menunjukkan bagaimanaperanan fungsi generasi.Misalkan trntuk fungsi generasi suatu osilator harmonik, dipilih
F = \ mulq2 cot Q
yakni berbentuk sebagai F, persamaan (151).
Maka dari persamaan (152) kita dapatkan
p-
p=
Kedua persamaan ini memberikan
2_ t- muiq
sin-Q
fungsi transf-ormasi
p=mr,1@)cotq
AF
-=dq
AF- aa-
moq cot Q
,1.
= fcos Q)
Selanjutnya tenaga potensial osilator harmonik dapat dituliskan sebagai
).v = Lkq'
dan fungsi Hamilton-nya nenjadi tertuliskan sebagai
{.
11 = ,, ,rqz^2
\kqz = =P- +'zm.2Kq
2
87
yang dari hasil di atas menjadi
H=(,)pcos20* I 2psin2QIII tr)
=(1)P
sebab mtuk osilator harmonik,
k2-= 0Jn
Lebih lanjut, karena F tak mengandung variabel t, maka
AF
5T= U
dan, ftngsi Harnilton-nya di dalam ruang fase (pQ adalah
H*=H=trtP
Dengan menerapkan persamaan kanonik Hamilton (146) dalam ruang fase(P,Q), kita dapatkan
o= 0H*=,-aPp = - ffi= o
sehingga untuk penyelesaian Q dan P dapat kita tulis
P'. tef,ap dan.Q = trl t + c[
Dengan mengingat H sebagai tenaga total osilator harmonik yakni nisal-nya E, nengingat hmil tersebut kita dapat menulis
P= H = E
uJ t0
sehingga dari hasi'l di atas kita peroleh
, fa-q'=V ;|,
tt" (o t + 6x;
atau
e=Asin(ura*o)
t,/
88
dengan
^ =l[ n-
f ^^'
adalah amplitude Osilator.Jadi tenaga total E berhubungan dengan amplitude A-dan frekwensi gmenurutkan
---o--- ----o---- ---r-- zIL
E=%^^2A2 t
Dapat kita perhatikan di sini bahwa di dalam ruang fase (P.Q), hasildi atas rrenunjukkan bahwa besaran P di sini adalah besaran tenaga di-bagi kecepatan sudut, bukannya irnpuls dalam artian fisis, dan Q adalatrbesaran sudut.
Dari contoh-contoh di atas kita memaharni batrwa dengan persanaanHanilton kita dapat memperoleh persamaan gerak apahila fungsiHanilton-nya diketahui atau dapat dirumuskan. Adaptrn transformasi kanonik ruangfase adalah dimaksudkan untuk memudahkan penyelesaian pers'arnaan Hamil-ton tersebut.Namtrn hal ini hanya mungkin bilanana ftrtgsi generasi F yang sesuai da-pat dirunuskan, dan dari ftrngsi generasi F inilah kemudian .diperolehpersamaan gerak dan ftrngsi transformasi dengan rnend'ifrrensialkan ftrngsigenerasi tersebut.Untuk menentukan ftrngsi generasi F, kita tinjau hubungan F denganfrmg-si Hamilton H yang telah diketahui. Hubungan ini terdapat dalan persa-maan (152) sampai dengan (155) dalam bent.r.rli
H*=H*EEt
Agar penyelesaiannya mudah, frmgsi transformasinya dapat dipilih sede-mikian rupa hingga furgsi Hamiltonnya di dalam ruang fase yangbaru ya-itu H* adalah noI, sehingga dapat kita tulis
H+
Persamaan (1561 ini, merupakan langkah pertama dalam pemilihangenerasi F dan 'lisebut persamaan t{amilton-Jacobi.Agar F dapat dengan mudah dicari dari persamaan Harnilton-Jacobisalah satu variabelnya H yai.tu p atau q seyog,vanya dinyatakandiferensial F terhadap variabel yang 1ain, yakni misalnya
$f--o (1s6)
fungsi
(1s6),sebagai
{.
p = # ataukah AFq=JF
sesuai dengan persamaan (153) ataukah persamaan (155) sehinggapersama-an (156) menjadi berbentuk
n(q,#,t)*#=o
I89
ataukah
nCp,#.)*#=oBentuk fungsi generasi yang memenuhi p =
F) (q,P,t) sedangkan yang memenr.rtri
q = # ialah Fr(p,P,t) dan Fo(pQt).
F = Fz' (q, P) + Fr" (t)
Suku pertana ruils kanan yakni n, t [e,p) disehut fungsi.Adapun dari
H*=0nenurut persamaan Hamilton (146) menherikan
: aH*Qi = q= o
yang berarti turtuk Q, dapat kita tulis
O.=9.-1 1
yang tetap, tak tergantung waktu t.Dan seperti itu pula dapat kita tulis
AF
5q-adalah Fr(qQt) dan
karakteristik.
soal osilator hannonik di atas,
menj adi
Lebih lanjut, agar F dapat mudah diintegralkan, kita pilih F yang dapatdiuraikan menjadi suku-suku yang tidak mengandtrng dan yanghanyamengan-dtrng variabel waktu t yakni
P. = cL.11
l.jntuk menjelaskanyakni yang fungsi
Kita pilih
sehingga dari
ini, kita ambil lagiHamiltonnya ialah
2^ri = + *hkq'
ZM
F -Fr(tPt)persamaan (155) ftmgsi Hamiltopnya
n = +, # )2 *'zkqz
yang bersama persamaan (156) nenghasilkan
1
6
90
Karena ruas kiri persamaan tersebut hanya merupakan fungsi q saja, se-dang ruas kanannya adalah fungsi t saja, naka masing-nasingruastentu-lah suatu tetapan misalnya o. Dengan demikian dengan mengintegralkan -nya, kita dapatkan
Fz = -cttUntuk menemukan pelsanaan gerak q = q[t], dari Persalnaan [153) kitaperoleh drZ
Q = -Ep-
yakni OFzo-o-T-
3Fz=-
Ecr
3Fr'=6- -E
yang la1u menghasilkan
'r' = -[u,
3+t =o,4J V ,* 1ct -% kr2)
= - flfl urc {-'.os ,lEyang selanjutnya memberikan
q =V S-.o' {{d(g + t)}
suatu persamaan getaran harmonik dengan
'/ k^=V m
Adapun tenaga totalnya E = H diberikan oleh(1s6)
EF,E+_5=:=o
.i.
fdo-^'#-+J rl ')
V zn (a - '., kq')
persanaan Hanilton - Jacobi
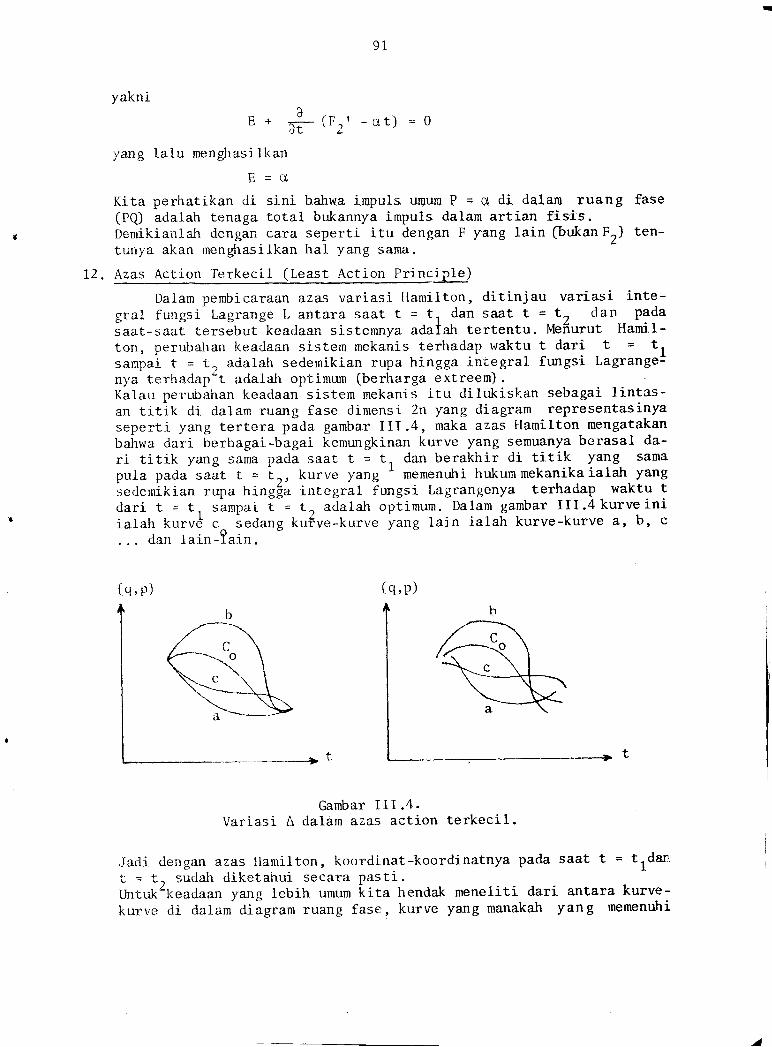
91
yakni
E
yang lalu menghasi
F2' -crt) = Q
Ikan
= (1,
Kita perhatikan di sini hatrwa i.mpuls uryum P = q di dalan ruang fase(PQ) adaLah tenaga total bukannya impuls dalam artian fisi's.Demikianlah dengan cara seperti itu dengan F yang lain Cbukan Fr) ten-tunya akan menghasilkan hal yang sama.
Azas Action Terkecil (Least Action Principlg)Dalam pembicaraan azas variasi Hamilton, ditinjau variasi inte-
gral fungsi Lagrange L antara sa&t t = t., dan saat t = t, dan padaiaat-saat tersebut keadaan sistemnya adatah tertentu. Mefiurut Hamil-ton, perubahan keadaan sistem mekanis terhadap waktu t dari f = tlsampai t = tr adalah sedemikian rupa hingga incegral fmgsi Lagrange:nya terl'radap't adalah optimum (berharga extreem)Kalau perubahan keadaan sistem mekanis itu dilukiskan sebagai lintas-an titi-k di dalam ruang fase dimensi 2n yang diagram representasinyaseperti yang tertera pida gambar lII.4, maka azas tlamilton mengatakanbahwa dari berbagai-bagai kemtmgkinan kurve yang semuanya berasal da-ri titik yang sama pada saat t = t, dan berakhir di titik yang sama
pula pada saat t = t., kurve yang ' memenuhi hukummekanikaialah yangie,lenrikian rupa hingfa integral fungsi- Lagrangenya terhadap waktu tdari t = t. sampai t = t, adalah optimum. Dalam gambar III.4kurveiniialah kurvd c^ ie<tang kufve-kurve yang lain ialah kurve-kurve a, b, c
... dan lain-?ain.
+----'.---.}' L
-_ >t
Gambar III.4.Variasi A dalam azas action terkecil.
,Jacli dengan azas Hamilton, koordinat-koordinatnya pada saat t = trdar.t = t, sudah diketahui secara pasti.Untuklkeatlaan yang lebih ,r*r* i.it" hendak meneliti dari antara kurve-kurrre cli dalam diiglam ruang fase, kurve yang manakah yang memenuhi
o-* T[-t
L2.
(q, p) (q,p)
92
hukum nekanika, tanpa rnemastikan keadaan sistem mekanis pada saat t =t, dan t = l). Kurve-kurve ini misalnya dilukiskan sebagaikurve-kurve8tt, b', cr 1.. dan lain-lain pada gambar III.4.I'tlaka azas action terkecil mengatakan bahwa untuk sistem yang fungsiHamiltonnya kekal, perubahan keadaan sistem mekanis dari saat a.= t1sampai t = t2 adalah sedemikian rupa hingga apa yang disebut action -
A_ nrt, at
tetap tertentu. Demikianlahuntuk A di atas menjadi
berharga terkecil.Ini berarti pula
)zAA=A/ Ipiqidt=0ir r-
dengan variasi A yang meliputi pula variasi kemungkinan keadaan padasaat t = t, dan , = t2. HaI ini dapat dibuktikan iebagai berikut.Dari persamaan (1.44)
AA=
Ldt
Untuk sistem mekanis yang total tenaganya tetap, yakni yang memenr:hihukum kekekalan tenaga mekanik yang berarti ftmgsi HamiltonnyaH tetap,H dj. suku pertama ruas kanan dapat dikeluarkan dari integral sehinggapersamaan di atas menjadi
tZ
AA=FIAt I
t1
jika A t, dan A tr'ia1ah variasi t di sekitar t, dan tr.Selanj utnya
AL=5r,.-$|atdengan 6 tut lain ialah variasi L dengan tmaka suku kedua ruas kanan dalam persamaan
t)
ItJit1 r
t)
^ .J I piq: d.
;1 1
)z 2z
=^J Hdr+ ^_Jt1 t1
. o[",u,t1
q3
*,('Alt'tt
t1r'dt= IJti.
t^rldJ Ldt+
t1
tt
at
!, 'ZrL=6J Ldt+Lat I
ti, t1
Perlu diperhatikan di sini bahwa pada umunnya
t,6l'Ldtlo-r,
sebab di t = t, maupun di t = t, boleh ada variasi 6 qseperti nalnya'dengan azas Flamitton 'Pada umumnYa
6L=i,rqrdqr).r(fratrl
-P dq.) cttdo- '1
Lagrange (136) menjadi
-, ( a-?ldtt'
l.- .aL
= ) l-
1 dq.'1
kita dapat
t-L
=ult I +
L,I
sebagai
+ LAt
Dengan demikian AA
tZ
I
t1
tz
t
t1
-t^6L dr . _[
' #0.. dt
,i,t1
(LAt) dt
dan 6 q, tidak
sehingga
{,o,=#rt6qiyang dengan mengingat Persamaan
of, u, = ift# (+/ 5ai jtd q ] dt
( aL 6 q,) dtI,Qi
"z6 q.)
rrlt1
menulis untuk
I t 3L 6 q.).rI dq.'1
AA
94
Dari persamaan ini kiranya kita perlu menyatakan strku kedua ruas kanandalan bentuk yang nengandung faktor A t. Hal ini dapatkitalakukan de-ngan mengingat
0e;Aqi 6ai -#4.
'-6qi+q.At
yang berarti6ei=Aqi trnt
Lebih lanjut, kalau dalam azas Hamilton variasi 6 q. di t = t, dan t =t, adalah-n?1, maka dalam azas action terkecil, ad6lah A q. fang samad6ngan nol di t = t, dan , = ,2.Denikianlah maka dengan nengingat definisi impuls unum persanaan (143),akhirnya kita peroleh
tz tz "zAA=HAt I xp.ri.At | +LAt I
t1 i^^ t1 tt
dan akhirnya dari persamaan (L44) atau (148) yang rrenghtrbtrngkan H danL, persamaan di atas menjadi
AA=0dan terbuktilah kebenaran azas action terkecil itu.
13. Variabel Action dan Variabel Sudut
Kita telah mempelajari bahwa untuk gerakan perputaran oleh gayasentral, impuls putarnya adalah tetap. Ivlaka untuk gerakan perputaran,dipikirkanlah untuk. mentransformasikan ruang fase sehingga di dalamruang fase baru impuls umuulya adalah tetap yakni sama dengan h misal-nya.Jadi di dalam ruang fase yang demikian berlaku
dPdq=hddq=znhsebab koordinat pasangan impuls putar p adalah sudut putar q.(Atas dasar inilah Sommerfeld mengemukakan rumus kondisi kwantururya
SPdq = t'+dengan h ialah tetapan Planck, bukan tetapan impuls).Integral di atas mengingatkan kita akan action
{
1
rld
ri
,{'{
I
{:.
ts
-1
95
fo =)l pi4i d.
. do.r- J61= lL P.,. r dtJl
r= lr p,dq.Ji ^r 'r
Maka didefinisikanlah variabel action
Ji=dpidai (157)
Bahwa impuls umum tetap, mengingatkan kita akan transfornasi ruang fasedalam persamaan Hamilton-Jacobi .
Akan tetapi transformasi ruang fase dengan nenerapkan persamaan Hanil-ton-Jacobi menghasilkan impuls umum P yang berwujud tenaga.l4aka untr-rk mendapatkan ruang fase di dalam mana impuls unum P adalahtetap tetapi- bukannya tetapan tenaga melainkan tetapan impuls putar,kita hendak melakukan transformasi lebi-h lanjut setelah persamaan Ha-milton-Jacobi diterapkan.
Dari persamaan Harnilton-Jacobi, kita memptrnyai
H(q,ffi' **l=osetelah kita tulis
AFp=5q_
dan
dengan mengingat
F=Ft(q,P) +Ft'(t)
= F'(q,cr) + F"(t)
P=cL
Selanj utnya
H = ct = tetapan tenaga totalKita hendak melakukan transformasi sedemikian rupa hingga impuls unum-nya ialah variabel action J..Dari
Ji = d pidai
= dftdqi ,ffi00, d
-/
96
dan
maka trntuk
P'(Ql , 92,
F'(Ql, Q2
lFr'(e1 $.1te2t1
kita dapatkan
Ji = Ji (o' o,
yakni suatu tetapan.Sebaliknya,
oi = oi(JL, Jz
sehingga kita dapat menulis
Ff = Ft(91, 92,
Dengan menganbil J' Jr ... J-menurut persamaan ^(153) kita"
^ -aF -aFtvi_q_q_yakni misalnya
lv. = ?l'i aJi
Jadi apa yang telah kita lakukan ialahselaku impuls umum, dan koordinat umum
mengikuti persamaan (153) .
Variabel 1rl. ini dis6but variahel sudutsudut dan lpada hakekatnya ialah sudutsebagai berikut.Dari persanaan Hamilton, kita dapatkan
'' aHwi={Tetapi
H = H(o' o,yang berarti pula
H = [{(.Ir J, ... .]
aH i-sehingga +- adalah fungsi dariO.J .
a
vi(J1, J2 ... Jr) .
Pl'
o1'
...orr)
a)n-
.J)n-
, Qr, JL, JZ, "' Jrr)
sebagai impuls umum P, P, P makaperoieh kobrdinat umufr 'patargailnya
aFt5r.
r.
Fr=
Fl =
Pz
q2
Qni
Qni
Pr,)
or,)
I
menggantikan P. = o; dengan J.pasangannya l{.'dipeioleh dengafi
karena nemang rerupakan besaranfase. Hal ini dapat dittrnjukkan
o)n-
n)
Jy J2' Jn, )rakni misalnYa
97
te!?pan integrasi.trnjau
^ aw.Aw' =9qoo'
yang dengan mengingat
i.J' = aFt, aJIdi atas menghasilkan
I
aw =f,fu*,- a f aF,- Ef I EEI- dqt
yang dengan mengingat lrrU.rrgai )
Ji=$#oo,cii atas, persamaan tersebra ,"rrrrd,
a wi = ,fl- tr.)Yang berarti
--i )'
dengan B* suatuSelanjutfrya kita
Jadi
yaitu suatu tetapan
wi = 'i (Jt, Jz ... Jr)
= vi(or, cr, ... dn)
tertentu, yang la1u memberikan
wi=vi *Bi
AWi=lbilamanaj_idan
Dengan demikian,AW. =1
mengingat0bilamanajlifungsi generaCi
F (qPt)
F'(qP) + F"(t)lalu mernberikan
aFtEq-
tr-
=yang kita pirih itu, yang
P.=1
98
kita dapat menulis
Aw. =+6nidt,=1
1
Ini berarti hatrwa apabita Q;, )raitu suatu besaran sudut putar yang
berpasangan dengan impuls ' putar Pi itu, mencakup keliling satu ka-li, W. bertambah dengan satu.
Maka dari hubungan
W. = v.t + $, yang berarti A Wi = viA t
V: dapat diinterpretasikan sebagai frekwensi dan W1 dapat diinterpre-tdsikan sebagai sudut fase.Untuk nenjelaskan penbahasan di atas, kita anbil. lagi osilator harno-nik di atas sebagai contoh.Untuk osilator harmonik, irnpuls putar p diberikan oleh
p-- tq2)
Jadi
yang nenghasilkan
atau
Sehingga
yakni frekwensi osilator.
14. Invariansi Integral Poincare
Di atas kita membicarakan perihal transfornasi kanonik ruang fase
Dengan transformasi ini p"tsarain Hamilton tetap berlaku, yakni inva-rian.
=6pdq
= zno lffJ ,/-Ttt- Zn /m
J ,fk=
-
ll -2r V m
. ALI0=-TT
1 t/k=
-
ll
-2r Vn1
= -[0=
Vz"tr
tI
:
I
I
Ii
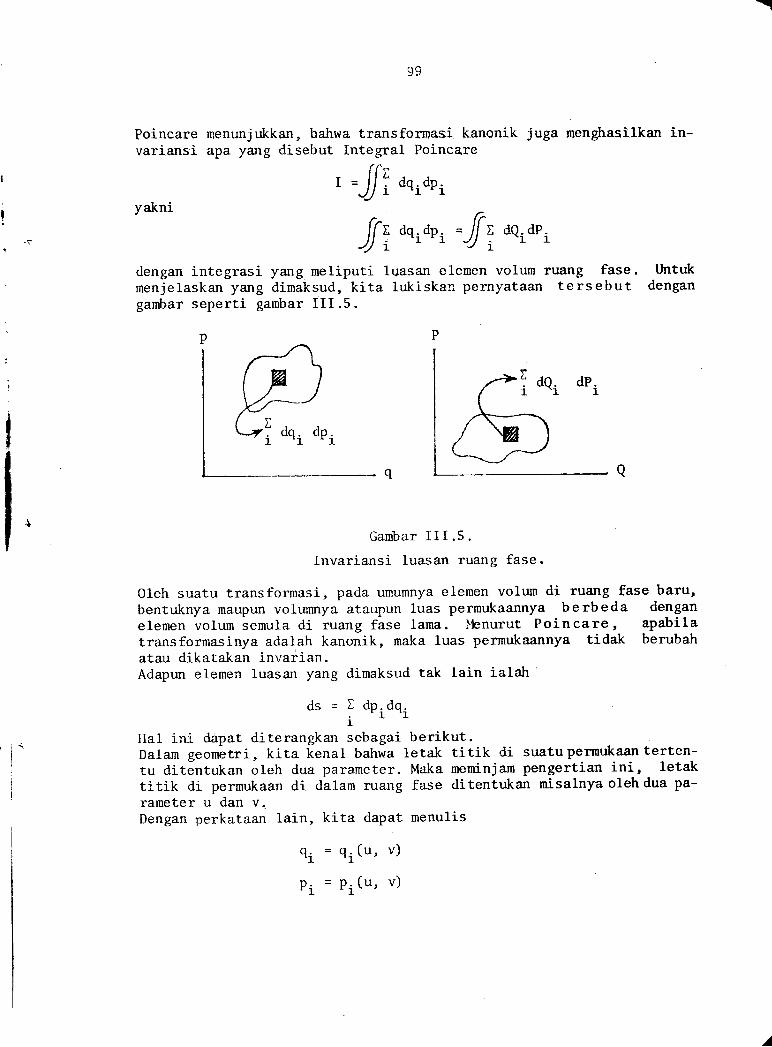
-
99
Poincarevariansi
yakni
t =J|idqidpi
jrl u"u"
menunjukkan, bahwa transfornasi kanonikapa yang disebut Integral Poincare
juga nenghasilkan in-
=[idQ. dPi
dengan integrasi yang meliputi lUasan elernen volun ruang fase. Untukrnenjelaskan yang dinaksud, kita lukiskan pernyataan tersebut dengangambar seperti gambar III.5.
Gambar III.5.Invariansi luasan ruang fase.
01eh suatu transformasi, pada umumnya elemen volum di ruang fase baru,bentuknya maupun volunnya ataupun luas permukaannya berbeda denganelemen volum semula di ruang fase lama. l4enurut Poincare, apabilatransformasinya adalah kanonik, naka luas permukaannya tidak berubahatau dikatakan invarian.Adapun elemen luasan yang dimaksud tak lain ialah'
as = I dpidqi1
Hal jni dapat diterangkan sebagai berikut.Dalam geometri, kita kenal bahwa letak titik di suatupermukaanterten-tu ditentukan oleh dua parameter. Maka meminjam pengertian ini, letaktitik di perrnukaan di ditam ruang fase ditentukan misalnya oleh dua pa-rameter u dan v.Dengan perkataan lain, kita dapat menulis
Qi = Qi(u, v)
Pi = Pi(u' v)
i ao. dP.1't_1
./
100
dan semacam itu pula turtuk yang di dalan ruang fase (p, Q).Demikianlah maka untuk elemen luasan dgi * dp* kita dapat menulis
Eq., Eq.dsi= #*.#{,
oP.. 3p.dpi = _5;: du +a;:au
sehingga
aqi 39i
Tiu -v-
oPi EPi
5u- fi-
do. x do- =-'1 41 duxdv
atau dengan notasi singkat kita tulis
dsi*gi=H# dyxdl,
Notasi tmtuk determinan di ruas kanan dinamakan determinan Jacobi.Dengan notasi ini, persamaan (158) menjadi tertuliskan sebagai
fr +*P d-ux{v/t## d,xd-v
yang berarti
' :9{!- = ,JL'll-. d(u,v1 i 5Iu, vi- (159)
Jadi kita hendak membuktikan persamaan (159).Dengan mengambil fmgsi generasi
F=F(qPt)yang menurut persamaan (L53) berarti
p. =1'-1 aei
a, =3$1
dengan
Qi. = Qi(trnrt)
Pi = Pi(trnrt)
IIil
! {
101
kita dapatkan
api
-=Eu
a aF.Etq'
3o.-s 'Ji6F-.du
)
.-a-tF-
j oqj '#'#.a2,
ET:+
- aP.r d (-or 1 J: aP. 'Do. ' EuJJ'1
aei5v
Dengan jalan yang sama,sehingga akhirnya kita
E (t1,nr)
rrm-
Eqi
Era2p
-orT{:
Harga determinan diaai ,oj Uoj
5u Av -E-Maka suku itu dapat
misalnya
a2pt_: aP. a P.llJ
kita hitung pulaakan memperoleh
aP. a2prJ1 3u ' Eo. aP.J.TJ
Dpi bqi bqioanav')u ---)v
^2p qj
I ;r,E,' a"
a2r Er
rr-. -ail'1')
3ei
5u
oai - a2pa" i@Da;- - a2r aPi
Av l ffiF:ffi")'1 J
'oj *Eu
{
-\'-tJ
iL1
-bL
1l
I1
t
0q.I
3u
,qj5v
3ei
F-
a2pffi5p-.'r)
suku pertana nuas kanan adalah
5=55 1L5=Qdv du 5v - il[- il/-diganti dengan yang lain yang berharqa nol
+IIij
j uga,
T
1
aP. aP.r_J3u 3u
aP. aP.1)
Dv Dv
t02
sehinggaaP.
15u
aP.)
0u
aP.J
0v
a2r5rffi'1 )
0o. AP.'1 )3u 3u
3ei5v
a2n
m-r1J
aP.)
?v
n _aFxi aP."1
l1
=f,j
nQj
5u
aQj
5v
=f,j
a(Q.Pj)
Tfu,-.,TaP.
JEv
15. Kurung Lagrange (Lagrgnge Bracket)
Di pasal 14 dikemukakan bahwa tetapnya atau invariansinya integralPoincare yang dirumuskan oleh persamaan (158) berarti j uga tetapnyaatau invariansinya determinan Jacobi yang diberikan oleh persanaan(159) , yang tak lain ialah
T
1
0q. Ep. En. Eo..'L '1,,-
-
I ='3u Ev 3u 3v '
aP. aP. ao.1 1 '1 r-5:v - -5u -t - /
3Qi
3u
Secara singkat persamaan di atas kita tulis sebagai
{'''}o,n = {u'v}q,P
r(i
( 160)
Notasi dengan kurung demikian dinanakan kurung Lagrange, dan persamaan(160) mengatakan bahwa harga kurung Lagrange tak tergantungpadasistenkoordinat kanonik, atau ruang fase, yang dipakai.Dengan demikian, index q, p ataupun Q, P tidaklah perlu dibubuhkan.Dari definisi kurung Lagrange, jelaslah bahwa
3(Q.,P*)
, h= Ii +EXij
yang dengan mengingat
akhirnya kita peroleh
3 (ei, pi)-5(u,D--
aP.1
F-
aP.L
Eu
Iv,u] = - tu,v]
\\
103
+
Substitusi u dengan q. atau q. serta v dengan p. atau p. dengan meng-
ingat bahwa q., t' ni, n, J tak saling berkattan, yaltni
Eq, Ep, Egr EP.* '' = d- : =^r - 6. r J = o . =1 = oT
- "t: ' 5ni - "ij ' apj ,oj
akan menghasi lkan persamaan-persamaan
tqi, aj) = o
{pi,pj}=o (161)
{qi, pj} = Uri
Persamaan (161) di atas dikenal sebagai kaidah utama kurung Lagrange.
16. Kurung Poison (Poison Braclcgt)
Kurung Poison seolah-olah berwujud kebalikan kurung Lagrange, Io-itu didefinisikan sebagai
f I -.Eu Ev ou 3r.,Lu,vJ=it5q;mi-5ei m;'Dari definisi ini, seperti halnya dengan kurung Lagrange, akan kitadapatkan
[,,"] = - [",,]Begitu pula akan kita peroleh hubungan-hubungan
[o* or] = o
["' ',] - o G62)
[or, ,J = 6ij
yang dinamakan kaidah utama kurung Poison.b"n!.r, substitusi u dengan q. ataupun p. dan v dengan fungsi HamiltonH, persamaan Hamilton dipat
-t ditrlis ' flengan notasi kurung Poisonsebagai
r'lrlei =
Lot, ,l dan Pi =
Lrt, 'l (163)
Ivlarilah sekarang kita tinjau besaran u yangmerupakanfungsi q lanp. Maka variasi u terhadap t diberikan oleh t
du -,0 ' dqi Eu dPi ,= ,- -tt,dt -i' 0qi dt api
= It H; o,. finrr
1C4
du -, Eu aH 3u aH
-
= | l-
-
Idt i.Oqi 3Pi 8Pi EQi,
= u, H (164)
Apabila u ialah tetapan gerakan, yaitu tak tergantung waktu, maka me-nurut persamaan (164) ini,
[",n]=o (16s)
Dapat ditunjukkan trhwa apabila v juga merupakan tetapan gerakan, makabegitu pula
l_ u, v J , sebagai berikut
Setelah melalui perhitungan yang panjang akan terbukti bahwa
r r ll * [,, [-,,,-l.l * [,, [,,,] = Q
yang dengan mengingat Lr,u] = - Lu,vJ dapat pula ditulis sebagai
[F,'] , { =L', [','] - [', t",.,]]Substitusi w dengan H akan menghasilkan
f -'r
lF,rl , Hl - o
j ikalau r- - J
f",H]=o dan fr,n]=o17. Rotasi kecil dan lltpuls Putar {engan_Kurung Poison
Di pasal 11 telah kita bahas hal transformasi kanonik, denganfungsi generasi F yang menentukan pers.rmaan transformasinya.Kita sekarang hendak merumuskan transformasi kecil. Adanya transforna-si kecil yang kecilnya hendak kita nyatakan dengan e kita pandang se-bagai akibat perubahan fungsi generasi Fr yang tadinya mentransforma -.sikan identik, artinya mentransformasikaf, kembali ke asalnya, atau se-cara fisis, tidak mentransformasikan.Mengikuti pasal 11 dengan mengambil fungsi generasi
FI = i otn'
akan kita peroleh aF_
P. = . r = P.r.oei1
Qi= #=0,-t-
I
105
F (q,p)
Dengan fungsi generasi
yakni P.. = p. dan qi= g., artinya secara fisis tidak ada transformasi,atau setara'fornalitas'matematik dikatakan terjadi transformasiidentik.Dengan demikian, ftrngsi generasi untuk transformasi kecil dapat kitatuliskan sebagai
=leiPi+eG(q,P)1
demikian, transfornasi kecil akan diberikanoleh
AGQi *u 5F:
1
AGataU P- = n. - e-*-*- 'i ri - aqi
Qi
or=tr=0,
AFE-i
dP.t-
AG+ ex-do.
!,
ini akan menghasilkan variasi-variasi
- ei ='ft=' ft6pi Pi - pi = -.ft
dengan mengingat bahwa untr-rk transformasi yang cukup kecil,kiranya tidak banyak berubah apabila P, di dalam S ituli diianti dengan p. . Dengan kita lainl kiranya kitti dapatG(q, P) rnenj adi C (q, i) .
Kedua persamaan
6qi = Qi
6u=
yang dengan
6u=
( 166)
.aGnarga _5p;
setiap kalmengganti
Selanjutnya, stratu besaran u yang nerupakan fungsi q dan p, olehtransformasi kecil, akan bervariasi sebesar
-,Du ^ Eu
i ,5; oqi 5o; oPir
nengingit rumus (166) nenjadi
--Eu aG Eu aG-c) l-
-l
": ' 3o. En. Do. Eq.'1'1'1
t[",0] (t67)
persamaan {167) menjadiSeandainya u ialah fungsi Hamilton H, ma(a
6H = e [r,.]yang dengan mengingat rumus (166), apabila G adalah suatu . tetapan ge-rakan, maka 6H = 0.Jadi transformasi kecil dengan tetapan gerakan selaku fungsi generasi,tidak akan merubah fungsi Haniltonnya.
Rotasi kecil, adalah keadaan khusus dari transformasi kecil. Kitatinjau rotasi kecil sekitar sumbu Z di dalam ruang Cartesian, dengansudut putar kecil 60. Kita perhatikan gambar III.6.

1.06
;ff :. i: ;xxr:i.,xTl" %,xi,l,"l!tar 60.
l!* * 6x, y * Or) akan menghasitkanditentukan oleh increement iudut pu_
variasi 6x o.f"ill'X,iji'i;rortaran kecir.Dari hubungan
x=rcos0y = t sinO
dengan mudah kita dapatkan
6x=-rsinO6O=_y606y=rcos060 = x6O
r,
Rumus variasi koordinat -yang diberikan oleh persanaan (16g) ini sudahtentu berlaku sama untuk'r"ilb.."rrg vektor ai'aaiam ruangcartesianr s€_hingga untuk komponen-komponen imputs p berlaku pula
AG
5;-- = x,ypersamaan (170)
AG=-DdY 'x
(168)
(16e)
( 170)
memberikan petunjuk
6P* - py 60
un, = px 60
Dengan menuliskan 60= e, persamaan (16g) bersama persamaan (166) meng_isyaratkan bahwa c adalah^seaemitia,i t iigg"-"-"'-.i
I
.# = _, dantx
sedangkan persamaan (169) bersanabahwa G memenuhi hubungan
aGAF = Py dan
(177)
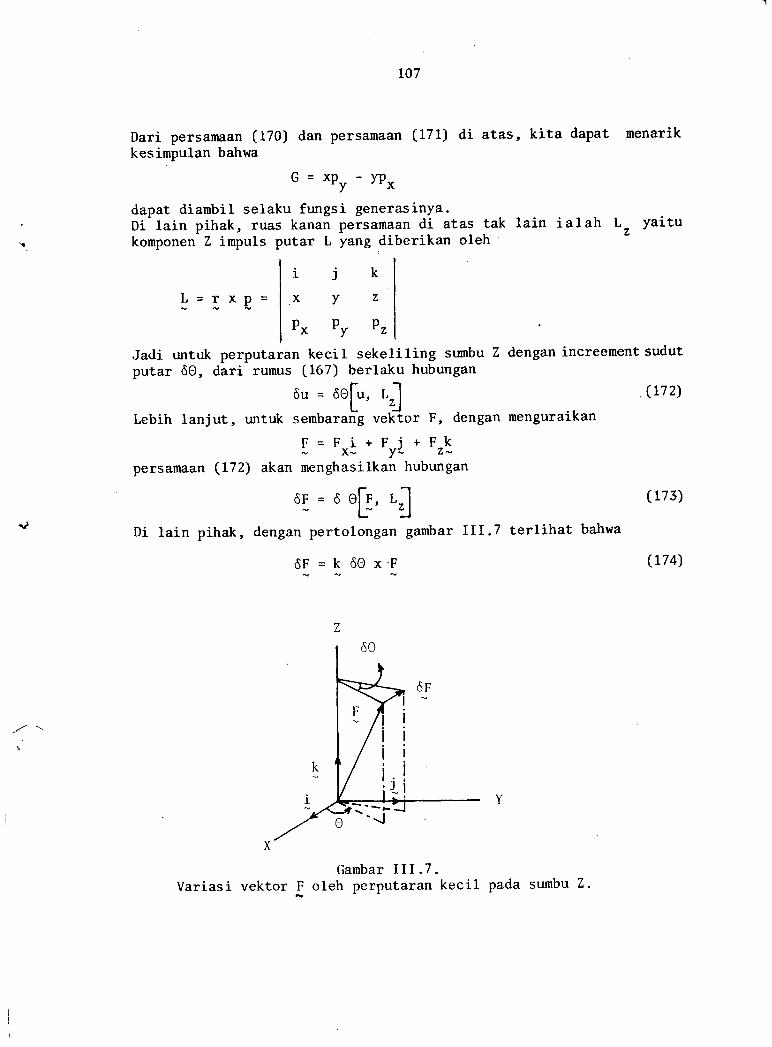
L07
dan persanaan (171) di atas, kita dapat menarik
G-xPy-YPx
dapat dianbil selaku fungsi generasinya.Di lain pihak, ruas kanan persamaan di atas tak lain ialah L yaitukomponen Z impuls putar l, yang diberikan oleh z
!=IxP=
Dari persamaan (170)kesimpulan bahwa
x
Variasi vektor
px Py pz
6F = k 60 x'F
dengan increement sudut
.(r72)menguraikan
( 173)
terlihat bahwa
(17 4)
ijk.xyz
Jadi untuk perputaran kecil sekeliling sumbu Z
putar 60, dari runus (167) berlaku hubungan
6u = 6OI-u, L-lL',z)Lebih lanjut, untuk sembarang vektor F, dengan
I=F*|*tri*FrIpersamaan (L72) akan menghasilkan hubtrngan
6r=601-F, L:l-- -r'z)Di lain pihak, dengan pertolongan gambar III.7
F
Ganbar III .7.oleh perputaran kecil pada sumbu Z.
108
Untuk perpu
[,,rpersamaan (
rE,
Dengan meng
aF2
-= ,/
0x
maka dapat
l-t F
L-
Jadi
Jadi kedua persamaan (17 4) nenunjukkan bahwa
=T*Idengan mengingat
-'1
+L N +LN Iy y zz)
[r,LL-I*I
serta menguraikan L menjadi
Li +Lky'- z-
fr,' ') =
persamaan (177)
0
taran
t17s)
t.ingat
_aFh-
dx
ditun
,!
(173) dan
['. ' IL-', z)
eliling l!,r= LI' L*N*
adi
= I*Iwa
sek
-lmenj
dbah
. ar2dan K- =dDtx
jukkan bahwa-1
NI =2F-J =ip=;
-0
F dengan L
L=Li+-x-mberikan
-'l
,L-l + kt)
me
["
--Li+L.iy- xa
=-lv
=l x
-0))
F' dengan L' ke
f 't -1
Ir,' L I =
LZ)
2FS- serta F2 =Fz +F2 *F2dP*xyz
(17s)
(176)
(177)
(178)
J:l
[r',! l]Dengan sumstitusi
persamaan
* [t,.'t,]
L
(17s)
+j
Jadi
F,.'tJ
Fr'tlV,,,,)
Adapun substitusi
1lI001
LLL
.fl
I
I
I
I
iI
nenghasilkan
(17s)
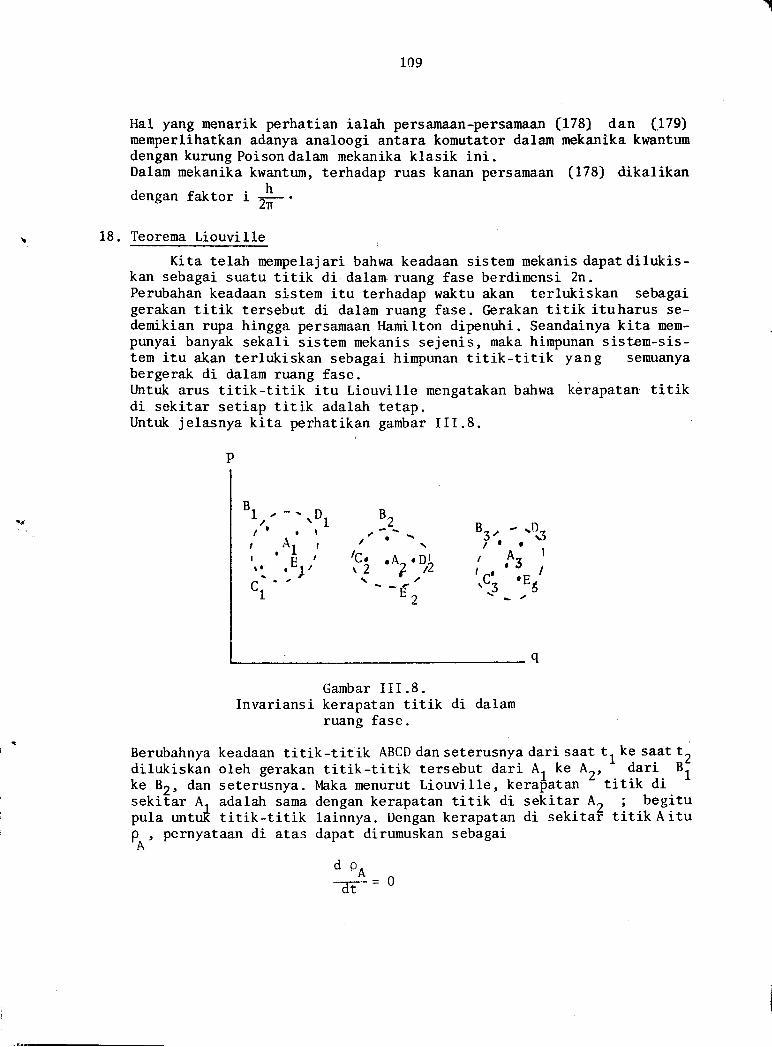
I109
Hal yang nenarik perhatian ialatr persamaan-persamaannemperlihatkan adanya analoogi antara komutator dalamdengan kurung Poison dalam mekanika klasik ini.Dalam nekanika kwantum, terhadap ruas kanan persanaan
dengan faktor i J-."2n
18. Teorema LiouvilleKita telah mempelajari bahwa keadaan sistem mekanis dapatdiltrkis-
kan sebagai suatu titik di dalarn ruang fase berdirnensi 2n.Perubahan keadaan sistem itu terhadap waktu akan terlukiskan sebagaigerakan titik tersebut di dalam ruang fase. Gerakan titik ituharus se-demikian rupa hingga persamaan Hamilton dipenutri. Seandainya kita rnem-punyai banyak sekali sistem mekanis sejenis, maka hinpunan sistem-sis-tem itu akan terlukiskan sebagai himpunan titik-titik yang semuanyabergerak di dalam ruang fase.Llntuk arus titik-titik itu Liouville mengatakan bahwa kerapatan' titikdi sekitar setiap titik adalah tetap.Untuk jelasnya kita perhatikan ganbar III.8.
(178) dan (17e)nekanika kwantum
(178) dikalikan
YBt
II
,--.Dlrl
.41Et."1' 'or'))
b2
B-z-- rlJ
a
,As
,7 r,
'.c3
lC.r2
3I
I,86
Gambar III.8.Invariansi kerapatan titik di dalan
ruang fase.
Berubahnya keadaan titik-titik ABCD dan seterusnya dari saat t1 ke saat t,dilukiskan oleh gerakan titik-titik tersebut dari A, ke Ar, - dari B;ke 82, dan seterusnya. l,hka menurut Liouville, kerafatan - titik disekitar A., adalah sama dengan kerapatan titik di sekitar A, ; begitupula untufr titik-titik lainnya. Dengan kerapatan di sekitai titikAitup. , pernyataan di atas dapat dirunuskan sebagai.A
dpA-zf = o
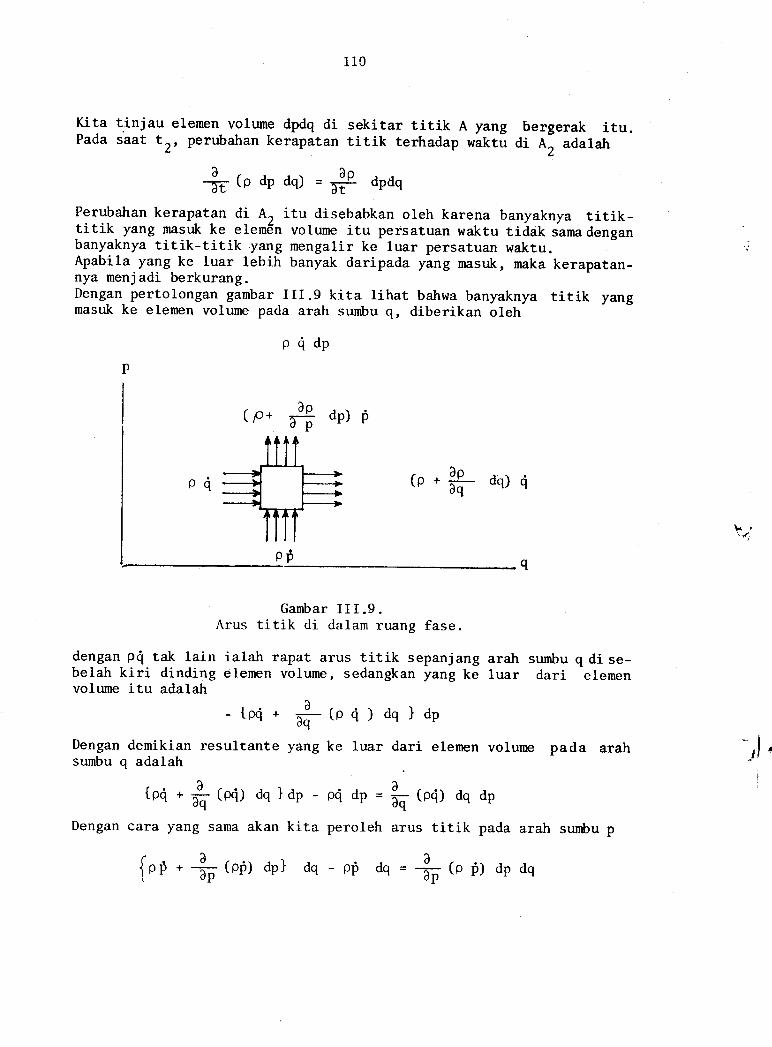
110
Kita tinjau elemen volume dpdq di sekitar titik A yang bergerak itu.Pada saat tr, perubahan kerapatan titik terhadap waktu di A; adalatr
* ,o dp dq) = # dpdq
Perubahan kerapatan di A? itu disebabkan oleh karena banyaknya titik-titik yang nasuk ke elem6n volume itu persatuan waktu tidak sama denganbanyaknya titik-titik.yang mengalir ke luar persatuan waktu.Apabila yang ke luar lebih banyak daripada yang nasuk, maka kerapatan-nya menjadi berkurang.Dengan pertolongan gambar III.9 kita lihat bahwa banyaknya titik yangmasuk ke elemen volume pada arah sumbu q, diberikan oleh
pQdp
,o.F dq){
Gambar II I.9.Arus titik di dalam ruang fase.
dengan pQ tak lain ialah rapat arus titik sepanjang arah sunbu q di se-belah kiri dinding elemen volume, sedangkan yang ke luar dari elemenvolune itu adalah
,.4-tp{. f (pti)dqldpDengan demikian resultante yang ke luar dari elemen volune pada arahsumbu q adalah
q
1l .
I
[pQ * fr tm dq ]dp - pq dp = fo- roCt dq dp
Dengan cara yang sama akan kita peroleh arus titik pada arah sumbu p
(pp) dp] dq - pp dq = + (p p) dp dq(.1pp *
aE
sehingga resultante yang keadalah
sumbu q dan p.Jadi kita dapat nengatakan bahwawaktu di dalam elemen volume dp
#dpdq=rfroo.+yang lalu menghasilkan perubahantu
111
luar dari elenen voh:me pada kedua arah
( 180)
fr cool dq dp . $ roOl dp dq = tfr rofl --$ trnl ) aq ap
Pada kenyataannya arus titik itu adalah pada segala arah; nanun kitaselalu dapat menguraikannya menjadi komponen-komponen pada arah sumbu-
berkurangnya titik-titik per'satuandq di A, adalah
(PD) j dpdq
kerapatan titik di A2 per satuan wak-
) - +,-3[,a2u-5pEq
-P=u*.P3'f .o(ffi.ffirSelanjutnya dengan nengingat persamaan Hamilton (146), snku ke tigaruas kanan nemberikan
ad a6 a.aH! J- =
-
1-Dq 0p Eq'Epa\=--opoq
-0sehingga kita dapatkan
3p_,0p .0pE=l o *P-E-p'
Adapun perubahan kerapatan per satuan waktu di sekitar A yang bergerakitu sama dengan perubahan kerapatan per satuan waktu sesaat di tempatAsedang berada (nisalnya di A?) ditambah dengan perubahan kerapatan persatuan waktu sepanjbng arah Eergerak A. Atau kalau dirumuskan
*=ip.+ (181)dt at atAkan tetapi perubahan kerapatan di sekitar A karena bergeraknya A di-berikan oleh
aoR Do do Eo do:=-J---J-!.+--l-at Eq dt op dt
.Ep -,op=qfi*PEFDengan demikian persamaan (180) dan persamaan (181) menghasilkan
$=o ( 182)

Lt2
yang tak lain ialah perumusan teorena Liouville.Teorema Liouville ini merupakan bagian yang berperanan penting dalammekanika statistik dan ternodinamika.
"l
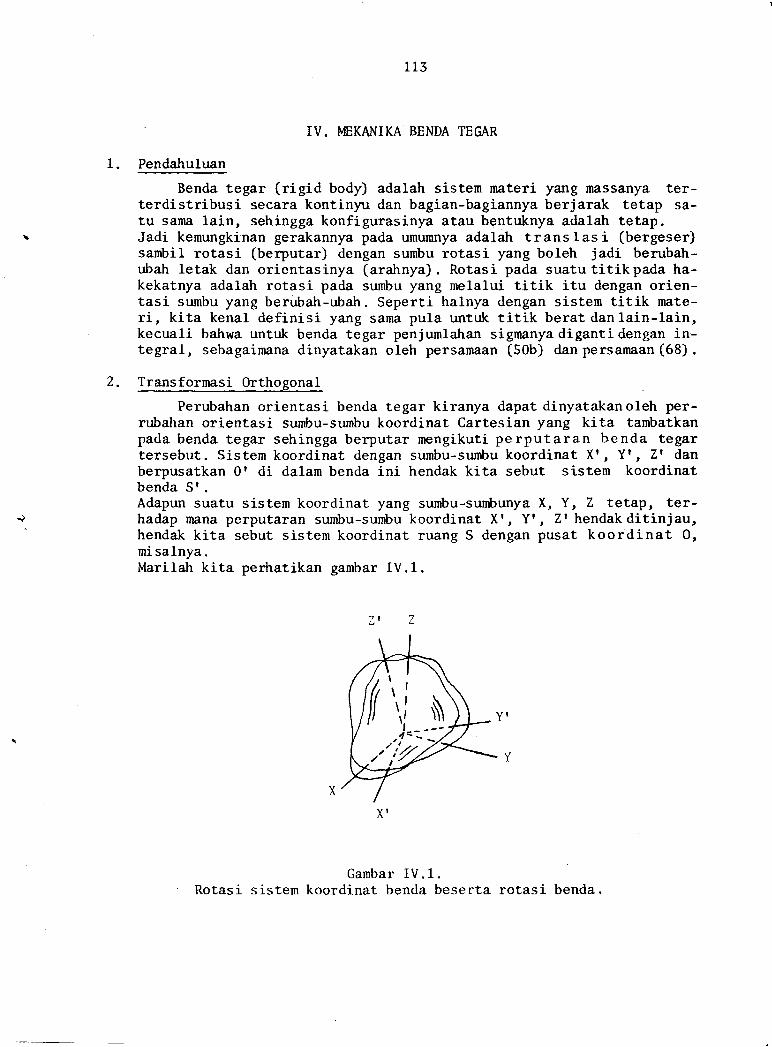
*.
115
IV. MEKANIKA BENDA TEGAR
1. Pendahuluan
Benda tegar (rigid body) adalah sistem materi yang nassanya ter-terdistribusi secara kontinyu dan bagian-bagiannya berjarak tetap sa-tu sama lain, sehingga konfigurasinya atau bentuknya adalah tetap.Jadi kemungkinan gerakannya pada umunnya adalah translasi (bergeser)sanbil rotasi (berputar) dengan sumbu rotasi yang boleh jadi berubah-ubah letak dan orientasinya (arahnya) . Rotasi pada suatu titikpada ha-kekatnya adalah rotasi pada sunbu yang melalui titik itu dengan orien-tasi sumbu yang berubah-ubah. Seperti halnya dengan sistem titik mate-ri, kita kenal definisi yang sama pula untuk titik berat dan lain-lain,kecuali bahwa untuk benda tegar penjumlahan signanya diganti dengan in-tegral, sebagaimana dinyatakan oleh persamaan (50b) dan persamaan (68) .
2. Transformasj- Orthogonal
Perubahan orientasi benda tegar kiranya dapat dinyatakanoleh per-rubahan orientasi sumbu-sumbu koordinat Cartesian yang kita tanbatkanpada benda tegar sehingga berputar mengikuti perputaran benda tegartersebut. Sistem koordinat dengan sumbu-sumbu koordinat Xr, Y', Z' danberpusatkan 0t di dalam benda ini hendak kita sebut sistem koordinatbenda St.Adapun suatu sistem koordinat yang sunbu-sumbunya X, Y, Z tetap, ter-hadap mana perputaran sumbu-sumbu koordinat Xr, Yt, Z'hendakditinjau,hendak kita sebut sistem koordinat ruang S dengan pusat koordinat 0,mi salnya .
Marilah kita perhatikan gambar IV.1.
Gambar IV.1.koordinat benda beserta
'1"',i il)*."'.
,".i/Z
Rotasi sistem rotasi benda.
114
Perubatran orientasi benda tegar dapat dinyatakan oleh berputarnya sum-bu-sumbu Xr, Yt, Zt di dalam benda tegar, terhadap sumbu-stunbu X, y, Zyang tetap itu.Untuk mudahnya, kita pilih sistem-sistem koordinat Sr dan S yang mula-rnula berimpitan satu sama lain. l,bka perubahan orientasi itu nisalnyasedemikian rupa hingga sumbu Xr lalu membuat sudut o dengan sumbu X,sumbu Yt lalu membuat sudut B dengan sumbu Y, dan sumbu Zt lalumenbuatsudutldengan sumbu Z.Secara aljabar, perputaran sumbu-sumbu koordinat Xt, Yt, Zt terhadapsumbu-sumbu X, Y, Z dapat dinyatakan sebagai transfornasi sistem koor-dinat X, Y, Z.Transformasi demikian, yakni yang sedemikian rtrpa hingga sisten koor-dinat yang orthogonal, artinya tegak lurus satu sama lain, tetaportho-gonal, dinamakan transformasi orthogonal .
Hendak kita selidiki sekarang rumus-rumus dan sifat-sifat transformasiorthogonal tersebut.lvtisalkan sepanjang sumbu-sumbu koordinat X, Y, Z di dalam sistem koor-dinat ruang S kita sangkutkan vektor-vektor satuan berturut - turut et,a), a<, serta begitu pula sepanjang sumbu-sumbu koordinat Xt, Yt , Z'di dalan sistem koordinat benda St kita sangkutkan vektor-vektor satu-an e1, ' a|t ' ost .
Maka untuk suatu titik P di dalam sistern koordinat ruang S dapat kitatulis vektor koordinat r sebagai
I=*ul*Yez*r"3Sedangkan terhadap sistem koordinat benda Sr vektor koordinat titik P
akan tertuliskan sebagai
It -*tu1' *YtaZ'+zer'
dengan sudah tentu selalu
:'=:
sebab 0r selalu berimpit dengan O.Jadi berlakulah hubungan
"t"l.t * yte2' * z'a3' = *"1 + ye. + ze,.
Dari persamaan ini hubungan antars xr, y' , z I dengan X, y, z tidaklahmudah dilihat. Maka sebelunmya kita perlu mencari hubungan antara e.,r,ert, ert dengan
"1, "2, a3, hubungan mana ditentukan oleh suatu funf;sitransformasi yang mentransformasikan sistem S ke sistem Sr.Hubungan demikian kita peroleh sebagai berikut.Cosinus sudut antara er', dengan el; e.l e, berturut-turut ialah "lt."1i ert.er; err.er; dan demikian pula untuk yang lain.Maka dilihat dari sistem S, vektor-vektor er', a2r dan err akan terba-ca sebagai
{-
*i.i
ii)I
11s
"1' = (el' ."1) e, + (er, .u2). e, + (er' ."S) us
"2' = (eZ' .u1) e, + (er, ."2) e, + (ert ."S) .s
"s'' = (es' .ul) e, + (er' .er) e, + (er' ." j) es.
atau misalnya
"r.t = tr"r"l * ^rztz *'L3t3
.2t = ,Zl.l * ^22"2
* ^23"3 (1gS)
ust ='s1"l * ^3ztz
* "ss"J
Jadi transformasi dari S ke Sr adalah linear danditentukanoleh matrixtransformasi
A-
ul1 'L2 ^rs
^2L ^22 ^23
^sr u3z ^ss
menurutkan
er = Ae (1g4)
dengan e dan e' adalah vektor-vektor yang komponen-komponennya adalah vek-tor-vektor satuan ul,
"2, e, dan e ,t, err, "jr.
Sebagaimana dikatakan di atas, transformasi ini adalah transformasiorthogonal yang sifat-sifatnya akan kita rumuskan berikut ini.Sifat-sifat orthonormal
"1, "2, a3, yaitu sifat bahwa "LJ "ZL"S dan
panjang uL, .2, e, masing-masing sama dengan satu, dapat dirumuskan de-ngan hasil kali skalar vektor-vektor satuan
"i."j = 6rj, (i, J = l, 2, s)
6,* - 1 bilamana i = jtJ=o bilamanailj
Hal yang sama berlaku juga untuk e.-t, err dan err yakni
e.r.e.t - 6..1 J 1lSelanjutnya dengan nenuliskan persamaan
( 18s)
( 186)
(183) secara singkat sebagai
e.l = I a. e-r k 1k k( 187)
116
( 188)
persamaan (186) meniadi,i.", t "t) . ,1", r "r) =orj
yang bersama persamaan (185) menghasilkan
i 'ro"in = 6rj
yang berarti misalnya222t1t **Lz *"lJ222
^2L *^zz *^2s
dan
^rr^zl *'Lz'22 *
^L3^23 = o
'2L'sr *
^22'sz' ^zs^ss = o
Dengan menuliskan
e = A-le'_1
dengan A - selaku matrix inversinya A yang komponen-komponennya misal-_1
nya ialah a. l, sehingga persamaan (187) memberikan' L)'_1
e.r = I a..-e-i [ -ik-k
Demikianlah maka kita dapat menuliskan
=1
-1
/"r\/\o=[ "J\"r/
dengan ^L, ^Z dan a, adalah vektor-vektor
t1 = ("11 ^r'2 "ts)a, -- (ar, ,22
^zs)
"3 = ('31 '32 ^ss)maka persamaan (186) mengatakan pula batrwa vektor-vektor a, , t.), danaa adalah orthonormal, seperti halnya "L, uZ, e3 maup,- ";,, 6Zt,€St.Sifat penting yang lain dari natrix A ialah bahwa deterninannya berhar-ga 1. Hal ini dapat ditunjukkan sebagai berikut. Dari persamaan linearsimultan (185), sebaliknya e dapat pula dinyatakan sebagai konbinasilinear dari er yakni
e.r = I a..e.1 1.1 J)-
- F a *. ^-1 -= , o.. ! ,ik uk,j tJt
= II -1
j k "l j "itt "k'
Akan tetapi komponen-komponen er (begitu juga e) tidak bergantungansatu sama lain.Jadi e.r bukanlah me'rupakan kombinasi linear dari e- | -:- "- - -r-'---- - klvlaka persamaan di atas pasti berarti
v -1j ^ij"ik = tik
Tetapi di lain pihak kita mempunyai
I.. a..a. =o..I 1JKJ r.K
-1'jt = Lj
sedangkan an. adalah transposenya elemen ai1, Yakni
k: = "jt_1
":n = 'jt_1
A- =AtYaitu inversinya sama dengan transposenya.Dengan mengalilan masing-masing ruas dengan A, persamaan di atas laIumenghasilkan
M-1 = AA'yakni
I-AAr atau Mr=fjika I adalah matrix satuan Yaitu
Jadi
sehingga
atau
L17
100011001
( 18e)
T_
Menurut aljabar determinant, berlaku hubungan
lABl= lAl lBl
-{"
Jadi
yang berarti
Adapun lol =seandainya
A-
sehingga persanaan di atas memberikan
Akan tetapi IAA'l = lnl ln'l = lll
lA'l = lnl
lol' - Ilnl = lL
-1, bersangkutan
-1
refleksi, bukannya rotasi, sebab
1
0
0
L adalah matrix A
(1e0)
1
0
0
118
dengan
00-1 0
01[=
maka
lnl - -1Tetapi matrix A demikian bersangkutan dengan refleksi sumbu.y, karenamemberikan
Pl=a-1 "1
Al=-a"2 "2
"3t = "sHal yang sama berlaku pula untuk
-1 0 0
010001
dan A-00100 -1
yang nemberikan refleksi sumbu X dan sunbu Z.Jadi yang bersangkutan dengan transformasi orthogonayang memptmyai sifat
lnl -1 .1.
J. Teorema Eu1er
Pada pembahasan transformasi orthogonal, kita tinjau perubahanorientasi benda tegar yang dinyatakan oleh perputaran sistem koordi-nat benda sr di dalam benda tegar terhadap sistem koordinat ruang syang tetap.
119
Maka Euler mengatakan bahwa untuk setiap transformasi orthogonal sela-Iu dapat ditemukan satu sumbu putar sesaat yang bersangkutan dengantransformasi itu-Sunbu putar adalah garis yang tidak ikut terputar, yakni berarti titik-titik padanya memptmyai koordinat-koordinat yang tidak berubah terhadapsistem koordinat ruang s yang tetap itu. 01eh berputarnya benda tegar,setiap titik pada benda tegar, (kecuali titik-titik pada sumbu pu[ar)akan mengalami perubahan koordinat-koordinatnya terhidap sistem koor-dinat ruang S seperti halnya dengan vektor-vektor er t, 6r,, e.' yangada di dalam sistem koordinat benda sr, yaitu menuiutkfn flersamaantransformasi.
xf =a11**rl}y*^13,yt =^ZL**^22y*rZS,zt=t31**^szy*^3s,
dengan xr, yt , zt ialah koordinat-koordinat di dalam s I sebelum'maupunsesudah perputaran, sedangkan x, y, z, adalah koordinat - koordinatnyadi dalan s sesudah perputaran. seperti harnya dengan persamaan (1g4),begitu pula persamaan (19L) dapat disingkat nenjadi
r'=ArDalam hal ini transformasi e diberikan oleh e' = A'"Jadi untuk titik di sumbu putar, berlaku hubr.rngan
Ar =:Dalam aljabar matrix, r disebut eigenvector matrix Ayangeigenvaluenyaadalah 1.Dengan perkataan lain, dalam batrasa aljabar matrix, teorema Euler me-ngatakan bahwa eigenvalue dari eigenvector matrix orthogonal adalah 1.Hal ini hendak kita buktikan sebagai berikut.Persamaan eigenvalue pada umunnya ialah
AI=II (1e3)
yakni
"11* * *t.y * araz = l. x
^2!* *
^22y *
^2s. =\y
"s'* * a32Y * arrz = xz
atau(rff -l) x+arry*r13, =Q
^Zt** GZz-\)y+arrz=O,31* *
"s2y * ("sS -l)z = 0
Persamaan simultan dengan 3 variabel x, y, z ini dapat dipecahkanhanyaapabila determinan
(1s1)
(te2)

120
ttt -l ^rz "1g
a2r ^zz-\ ,zs
^sL ^32 "gs-tryang menghasilkan
-3 -2I- - 1- (atl * azz * .3S) * l(at1 ^Zz
* ^22 ^s3
* ^Ll ^ss
- ^23^32*....:......) * (atl ^Z3rs. + ....... ) - 0
Misalkan akar persamaan di atas adalah 11, 12, iS.Maka persamaan di atas sama dengan persafiaan-
(1, - rr)(r - r2)(r - 15) - o
atau -5 Z_I" - ),-(lt * L2 + trj) + l(),1tr2 + .... ) - tr1t2tra = 0
yang dengan nencocokkannya dengan persamaan di atas kita dapatkantr .). -I.-L n .'2 * ..3 = "11
* r22 * r33
yaitu sama dengan trace (spur) atau jumlah diagonal matrix A, dan
I I I _^L 2 '.s = aLLaz3'32*
= lAlJadi nengingat persamaan (189) untuk matrix transformasi orthogonal,berlaku
I I ). -'1 2 3- L
Di rain pihak, dari persamaan (192), dengan mengambil transpose conju-gatenya, kita dapatkan
(Ar)* = 1* ,*yakni
,* A* = l.* ,*Tanda + dimaksudkan untuk notasi transpose conjugate yakni sesudah di-transposekan - lalu diambil conjugate komplex-nya, sedang tanda * ada-lah notasi untuk conjugate komplex01eh karena A adalah matrix rieel, maka
A+=A'sehingga
+ -* +rAr -I r
=$
( 1e4)
L2L
Dengan rnengalikan Ar di sebelah kanan masing-masing ruas dan nengi-ngat pula sifat matrix orthogonal persamaan (L89) serta persamaan (193)kita peroleh
,*AtA, = tr* r+ Ar
atau!Ir r = l,* r' ).r
= tr* ),r*ryang berarti
tr*). = l-
Ini berarti bahwa ). berbentuk
r=.:iqJadi kemungkinan harga-harg3 If, \2, tr, menurut uraian di atas ser-ta mengingat persamaan (194)adalah
^, = -'
1-'t2 -l.- =J
atau boleh jadi
-1
1
( 1es)
( 1e6)
11 ="\2=6trs=1
iq
iE
Persamaan (195) tidaklah cocok dengan kenyataan, sebab ).= -1 berartirefleksi, sedangkan rotasi takkan menghasilkan refleksi. Jadi persama-an (196) yang harus diambil sebagai penyelesaiannya.Bahwa tr, = 1 menunjukkan adanya suatu sumbu putar tertentudalam trans-formasi drthogonal tersebut, dan ini membuktikan kebenaran teorema Eu-ler.
4. Sudut-sudut Eule_r
Di pasal 2, transformasi orthogonal ditentukan oleh harga - hargaelemen matrix a.. berdimensi 3 x 3 ; jadi ditentukan oleh 9 parameter.
Namun sebenarnya ke 9 parameter itu tidak bebas satu sama lain, sebabdibatasi oleh hubungan parameter-parameter menurutkan persamaan (188)yang dapat diuraikan menjadi 6 buah persamaan
I
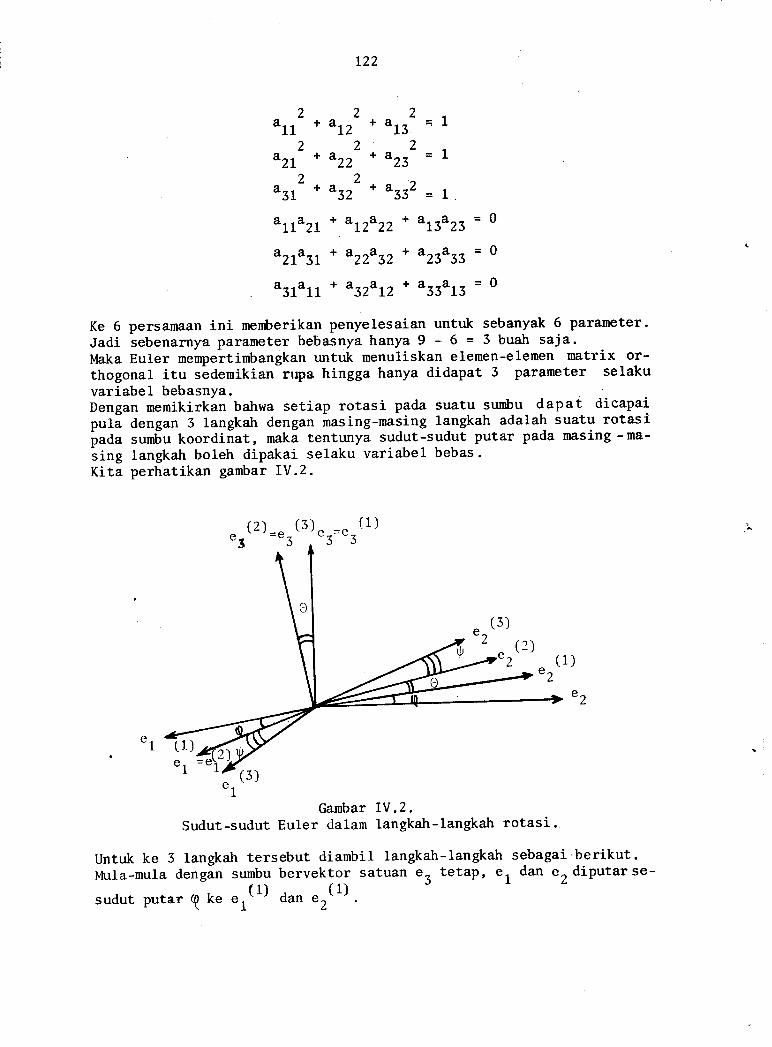
t22
222."1r. *^Lz *"ls =r
222-^2r * ^zz
*'zs = r22
^sL *^sz *ass"=L
'LL^2L *'Lz'22 * ^ls'zs = o
^zL'sL *
^22^sz *'2s^s3 = o
. t31"11 * '32'!2 *
"sstls = o
Ke 6 persamaan ini menberikan penyelesaian untuk sebanyak 6 parameter.Jadi iebenaralya paraneter bebasnya hanya 9 - 6 = 3 buatr saja.Maka Euter nempetrtimbangkan trntuk nenuliskan elemen-elenen matrix or-thogonal itu sedemikian rupa hingga hanya didapat 3 parameter selaku
;ffi::"LHlHl# bahwa setiap rotasi pada suatu surnbu dapat dicapaiputi dengan S langkatr dengan masing-nasing langkah adalah suatu rotasipada surnbu koordinat, maka tentunya sudut-sudut putar pada nasing -ma-sing langkatr boleh dipakai selaku variabel bebas.Kita perhatikan ganbar IV.2.
^ (2)
=u-"35(5)^ _. (1)
-JJ
1,)
"1 =
e1 -
Ganbar IV .2.Sudut-sudut Euler dalam langkah-langkatr rotasi.
Untuk ke 3 langkah tersebut diambil langkah-langkah sebagai berikut.Mula-nula dengin sunbu bervektor satuan e, tetaP, e, dan e, diputar se-
sudut putar q t" "r(1) at. ur(1).
"r.
Kemudian dengan "r(r)
"r(2) drn "r(2).
t23
dan ea(l)' = e, diputar sesudut O ke
(2) aiputar dengan su-
tetap, "r(f)
L0
0 cos
0 -sin
h terakhir,
cosY+e2
sinV+e2
['i]
Akhirnya dengan ur(2) tetap, er(2) = e1(1) dan e,
dut putar sebesar Y tu ur(s) d.n "r(3).Dengan demikian, wrtuk langkah pertama berlaku
"r(1) = e1 cos t * "z sin rp
'"r(') = -"1 sin tQ + e, cos tt
er(1) = *3
^'"" (e. (1)) [ .", ,q sin rp .]l"],t,1 = l-sinq cosQ ol
l."it"j l. o o ')dan untuk langkah kedua berlaku
^(2)_^(1)"1 -vl
"r(2) = e2(1) cos e + ej(1) sin o
"a(5) = -ur$) sin O + es(1) cos o
,)
0 sin0l
e.orrlUu.trk,,
/
(2) sin y(2) cos v
[,;l;]lIngkan untuk langka
.(3)= aQ)"1 -1
"r(3) - -"r.('
"r(3) =
seda
atau
atau
"r(1)
"r(L)- (1)*3
" r(2)
(2)
(2)
(2)
"1tz
e--)
YO
YO1
[";:,]]ft.",t"J {.
cos V sin
sin Y cos
00
sehingga resultante ke 3
L24
tersebut ryemheri
00
cos 0 sin
"r(s)
eG)
e, (3)
kangkah
ll
lan
YsinY
YcosY0
cos q
-sin {[
0
sin rp
cos t[
0
cos
sin
0
u1
"2
"s0 -sin 0 cos
yang lalu menghasilkan
"11 = cos tf cos Y - sin t1
aLZ=cosQsinV+sintf
"1S = sin Q sin 0
aZL= -sin q cosY- cos Q
aZZ = -sin Q sinY+ cos Q
a2S = cos tQ sin 0
aS.- = sin 0 sin Y
^SZ = -sin 0 cos Y
^35 = cos 0
Sudut-sudut Q, 0, dan Y yang merupakan variabel-variabel bebas dalamnatrix transformasi di atas dikenal sebagai sudut-sudut Euler.
5. Parameter Cayley - KleinSeperti halnya dengan Euler, begitu pula Klein hendak menyatakan
matrix transformasi dengan elemen*elemen yang mengandung 3 variabel be-bas saja.Untuk mereduksi 9 parameter elemen matrix menjadi 3 variabel bebas,Klein berpaling ke natrix kornplex. Denganmatrixkomplex, setiap elemenakan berisi 2 variabel yakni 1 untuk bagian rieelnya dan 1 untuk bagi-an inaginairnya. Dengan demikian matrix transfornrasi yang tadinya ber-dimensi 5 x 3 dapat disederhanakan menjadi matrix komplex berdinensi2 x 2.Antara matrix rieel dan matrix komplex menang ada analoogi, yaknikalaudalam aljabar matrix rieel, sifat simetri matrix rieel tidak berubahdi bawah transformasi orthogonal, maka dalam aljabar matrix komplex,sifat Hermitian suatu matrix komplex tidak berubah di bawah transfor-masi Unitair (Unitary transformation). Maka dipilihlah suatu matrixHermitian berdimensi 2 x 2 yang mengandung 5 variabel bebas x, y,z,didalam apa yang disebut ruang spinor, yang menyatakan vektor di dalamsistem koordinat Cartesian berdimensi 3.Llntuk nratrix Hermitian tersebut dipilihtah
cos 0 sin Y
cos O cos Y
cos 0 sin V
cos O cos V
yan
I)["
x-1y
-Z
H-+iy
g berbentuk
(1e8)
'1
t25
Adapun selaku matrix lInitairnya yarlg Dentqgnsfornasikan matrix Hermi-tian secara l.jnitair, misalnya dapat dituliskan sebagai
rr= [" t]
[a 6JAnaloog dengan sifat orthonormal matrix transformasi orthogonal A yangdinyatakan oleh persamaan (188) . matrix tlnitair di atas menpunyai sifatorthonormal menuiutkan kaidah UU+ = U*U = I t O j, Xaknic,*cr + B*B=1 o*o* . =l Io',Ja * a + 6 * 6 = 1, BIB * 6 6 = t" (2oo)
;;.'I uuil=3""" I-3.: .3:3Dari syarat orthonormalitas persamaan (200) ini diperoleh hubungan
c[*0,=6*6a*a=S*g (zOL)
Selanjutnya seperti halnya syarat orthogonalitas persanaan (190) dike-hendaki pula
(1ee)
(202)l" ul_- ,
'a 6l
Dari persamaan (200) dan persamaan (202) dapatlah dipilih
3= 3;Dengan pemilihan demikian, persamaan transformasi Unitair yang menter-jemahkan transformasi orthogonal dari (x, y, z) ke (Xt, It, zr), ada-Iah sedemikian rupa hingga
[o Blf, *-iyl [u -Bl
'nu*=1, u.J[..r, -,) [, ")(r' x' - iy')
= | I (203)
[*'*iy' -r')Dengan menyelesaikan perkalian ke 3 rnatrix, persamaan (203) di atasmemberikan hubungan antara xt , y, , z I dertgan x, y, z sebagai
x' = \ (oz - a2 * d2 - gZ)x * rie2 - o2 * d2 - g2)y + (86 - ag)z
y, =\i(oZ *a2 - g2 - 62y** Lr(az +A2 *gZ * 62)r-i(o$+ D6)z
zt=(Bd - cl8) x + i [oD + $$;y (ct6 +$| ;2

i
iI
t:i
L26
= x cosq +
=_x sinQ +
yang lalu memberikan
x(1) * ir(1) = (x + iy) "-iQ
x(1) - iy(1) = (x - iy) "iQ
yang dengan membandingkannya dengan hasil manipulasi dari persamaan(203), kita dapatkan
6 = "-2iqc' =
"%itQB = 0.3=0
sehingga di dalam ruang spinor, langkah rotasi pertama itu ternyatakanoleh matrix komplex dimensi 2 x 2
Dengan demikian elemen-elenen natrix A s.ekarang ternyatakan dalan va-riabel-variabel o, B, a, dan 6, yakni
(r,ro'-d2 *a2 -gz);rr (a2 - o2 *62 -s2); -a6 -oB la=f zi7a2 *a2 -92 -a\; tz@2 *a2 *gz *62); -i (oB +aollczoal
I ^ ;r^l,aAr. ^A,r^l\ 86-40; i(oO+86); s6*Ba,j
Adapun hubrmgan antara parameter-parameter Cayley-Klein o, B, a,6, dengan sudut-sudut Euler Q, 0, V, pada dasarnya dapat diperoleh de-ngan menyamakan persamaan (204) dengan natrix di persamaan (197).Tetapi sayang penyelesaian aljabarnya dengan cara ini sangat berkepan-jangan. Cara yang lebih sederhana ialah dengan melalui langkah - lang-kah rotasi pada perumusan sudut-sudut Euler di pasal 4. Dari langkahpertama, kita tulis
.lI
.,-rrr )
O+zsin00+zcos0
ysinQycosQ
x(1)
y[1)
%iQ(* B) ("tt_ttt-l[a 6j [o
rotasi yang kedua,
(2)X'=X,.(2)y=yzQ) = -y
(20s)
l"Intuk langkah
cos
sin
-I
t2';
atau
x(2)
y[?)
zQ)
(, o
= lo cosoI
\0 -sin 0 ,,:][l]kita terpaksa membandingkan elemen-elemen matrix rotasinya dengan ele-nen-elenen matrix pada persamaan (204) yang renghasilkan
Setelahperoleh
,(o2-a2*a2-g')=l\i(az *32 -g'-a\ =s
86-o3=0\iG'-o2 *a'-g') =g, toz * a2 * 92 * 62) = cose
dst.manipulasi aljabar atas persamaan-persamaan ini, kitaakan men-
r" *l_/'""'l, o,J
- \'sin !
i,i"ro)o coshof (206)
Adapun untuk langkah rotasi ketiga dengan mudah kita ikuti bentuk yangsana dengan yang pada langkah pertama hanya untuk tp kita masukkan Y,sebab langkah ketiga itu adalah juga rotasi pada e, atau sumbu Z se-perti halnya dengan langkah pertama.Jadi trntuk langkah rotasi ketiga dapat kita tuliskan
Bj = l"'r '
'l (zo7)
oJ L, e-%iu1ya dengan mengalikan matrix-matrix ruas kanan persamaan-per-), (206), (207) berurutan, matrix rotasi dengan sudut-sudutu variabel-variabel yang diberikan oleh persamaan (197) di
"%i(t[+Y) cos L, ie%i(q-U sin
e%i(v-q) sin L o "-%i(q+9 cos
spinor menjadi berbentuk
f"f ,I[.",to i'i'zol f"
[o "-"t9 [i rin L,t cos % o ) Lt
l"Ia
lvlaka akhirnsanaan (205Euler selakdalam ruang
[" ul =
I a oJ
'riP O t'l
""'r)
:,)
I[,
r 1c
Adalah menarik
H
yang kalau diur
untuk diperhatikan matrix
f' ,. - t''l
Ix*ir -z )aikan menjadi berbentuk
[' 'l .,[' 'l +zf'i"' ,)'[' ,) [',l
-t)
=xdx * y(v * r(,
Jadi matrix Hermitian H seolah-olah adalah suatu vektor di dalamsistenkoordinat yang vektor-vektor satuannya sepanjang sumbu - sunbtrnya yakni
6x, (y,6, adaLah matrix-matrix dimensi 2 x 2'
Dalam mekanika kwantum , (0 1 I(*= I I
[1 o)10 -1)
(v= Lr oJ
11 0)(' = [o -')
fl 0)(r= l., ,)dikenal sebagai matrix-matrix Pauli yang oleh Pauli dipakai wrtuk me-
nyatakan rotasi sPin elektron.Dj- atas telah tita petajari, bahwa rotasi sekitar sumbu Zdi dalamruang
rpi"ot, dinyatakan ol"tt-pelsamaan (205). Dengan matrix - matrix Pauli,,nitri* rotasi tersebut dapat dinyatakan sebagai
(a B) [*"itQ o )ll=lr[, 6J I o "-''iQ J
(cos'ttq * i sin L, Q O l=ll[o cos14 Q - i sin % QJ
= ( r cos %r[ *(, , sin rztg (208)
L29
( o B)
I I =(cos%o[a 6j
Adaptut untuk rotasi pada sumbutakan oleh hubungan
xr = x cosy + z sinyy'=yzt=-xsinY+zcosV
Sedangkan rotasi pada sumbu Xj adi
)rang dinyatakan oleh persa4aan (206) men-
* Gi sin L, o (209)
Y, yang di dalam ruang Cartesian ternya-
atau
sin vl
.3'*Jdengan cara membandingkan elemen-elemenmatrix persamaan (204), setelah melaluioleh
f" B'.l _ fcoskv -sin%Y'\I
L, ,,J [sin % v .os ,,Y )= ('Icos >l* id, sin >rY (210)
Sampai di sini kita perhatikan bahwa persanaan-persanaan (208), (209),dan (210) adalah sebenttrk, sehingga secara umum kita dapat nerumuskan,tmtuk rotasi sekitar suatu sumbu
(a Bll: :l =(.or\Q*i(sin%A (211)ta 6J I 'Y 'r
Perumusan persamaan (203) ini mirip dengan pernyataan koordinat suatutitik di dalam diagram Argand seperti yang tergambar di gambar IV.3.
i( srn \0
(1 tot
GambarRotasi di dalam
[.'l [.o= v o
ly'l = l0 1
L ,'J \-sin Y 0
r,.llrl1., )
matrixnya dengan elemen - elemenmanipulasi alj abar diberikan
t;0
IV.3.ruang spinor.
130
Rotasi sehesar 0 di dalam ruang Cartesian akan ter-terjeuahkan sehagairotasi sebesar 't 0 di dalam diagran Argand yang lalu disehut ruang spi-nor karena b.ersangkutan dengan rotasi spin ; demikianlah maka rotasi 2ndi dalam ruang Cartesian yakni yang memutar ke posisi sernula kembali,di dalam ruang spinor akan ternyatahan sebagai rotasi n, yakni rotasi\ jalan sebelum kembali ke posisi semula. Atas dasar perniklran inilahmaka diketemukan bilangan kwantum spin untuk elektron sehesar a Lr. Hal-lain yang juga menarik perhatian, ialah hasil manipulasi -
222+y +z
0FIH* =
0
22I
ii
l
)
.r.-)0)
,)
x+y
t'Io
f-I
(.
-2 2 2-[x+y+z))))
(x- +y'+z') 6'.,
yangrLya
22x+y+zLagi pula sesudah mengalami transformasi Unitair, kita lihat
Hr (H,)* = (x''*r''*r'', (,=HH*
yang berarti bahwa transformasi Unitair tidak merubah panjang 'tvektor"H.
6. Rotasi KecilSuatu rotasi pada suatu titik boleh dipandang sebagai urut-urutan
rotasi-rotasi kecil pada suatu sumbu, dengart sr:tiap kali sumbu rotasiitu berubah-ubah "
Kita hendak mempela_iar:i bagaimana merumuskan rotasi pada suatu titik.Rotasi kecil sistein knordinat benda S' terhadap kedudukannya semulayang berimpit dengan sistem koordina.t ruang S dapat dirumuskan denganpersamaan
6"1' = 6fl* e, + 60rre, + iit?rre,
6"r' = 6021 e, + 6flrr.Z * 6Q23.s
(2t2)
berarti bahwa H seolah-olah bertindak selaku vektor yang panjang-
[ "r]1", I
["r,}
dengan notasi
I u"''
II 6"r'
I
Iu".' j
6"r'= 6051 e, + 6f)rre, + 6Qrre,
matrix
( unr, 6CIr, 60rr)
= | 6ezr 6ozz onr, I
lon ,, 60j2 6CI33 J
atau
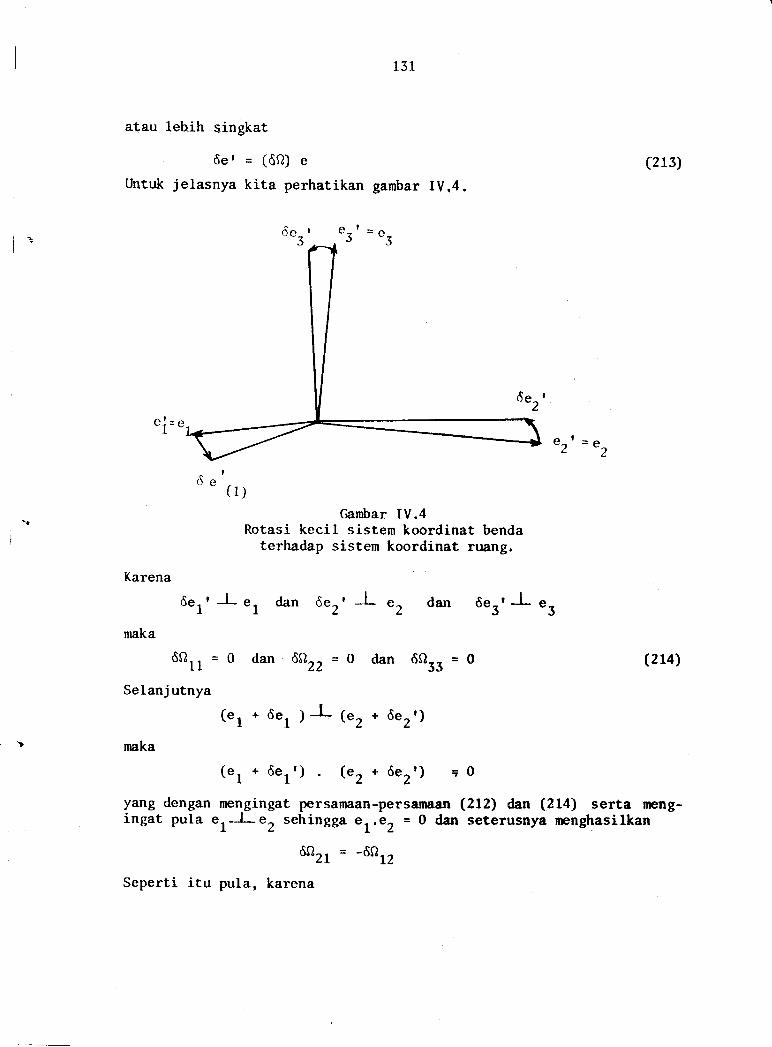
131
atau lehih singkat
6e' = (6n) e
tntuk jelasnya kita perhatikan gambar IV.4.
"i=" tz' = tz
(2Ls)
(2t4)
,0e
(1)
Gambar IV.4Rotasi kecil sistem koordinat benda
terhadap sistem koordinat ruang.
Karena
6er'I e, dan 6er' I e,
maka
dan 6er'I e,
6or, = o
Selanj utnya(et
maka
dan 6flr, = 0 dan 6Qr, = 0
+ 6e, )I (uz + 6er')
yang denganingat pula
("1 * 6er') (eZ + 6er') = 0
mengingat persamaan-persamaan (212) dan (214) serta neng-
"1 | e, sehingga e1 .@Z = 0 dan seterusnya rrenghasilkan
6O21 = -60f2
pula, karena
uJ' = "s
Seperti itu
*H
x!i
*
(",
' (ez
akan kita peroleh
132
G, * 6.eat)
(u3 * 6er')
oer')
6ert)
I
!
1 mengandung 3ut-sudut Euler.
dapat
6CI, )6CI,
I
,)
tinggake sud
60JL = - 60r,
60J2 = - 6AZS
Dengan demikian, trntuk matrix (E0)
(o 6osI
(60) = l_un. o
I
[ 60, -6CIr
Kita perhatikan bahwa matrix 16CI;bebas saja, rneskiptrn tanpa transfoDengan penulisan demikian, maka
6"1'=er6flr-erdQr=6CI
6uZ --edftr+erdftr=6CI
6"J' = erdQ, - er6f2, = 6-fl
, kita
sudahrmasi
*"1
*"2
*"s
menulis misalnya
(21s)
variabel
Et. I*q-konponen-komponennya ialah 6fr1, dQ2, 603 disebuttasi kecil.Demikianlah maka untuk rotasi kecil sembarang titik materikedudukannya semula
I = xe1 *.y"2 * *"3 = *"1.r + ye.r + zerr
dengan mengingat bahwa rotasi itu menyertai rotasi sistemkoordinat Sr,yang berarti
6x=0 dan6y=g dan6z=0kita dapat menulis
6r = xd e1t + y6 err + z dear
= x6f,)xe, + y 6CIxe, + 26f,) xe,
= 6flx(xer) + 6f,x(yer) +6fl x(zer)
=69*I
vektor ro-
yang vektor
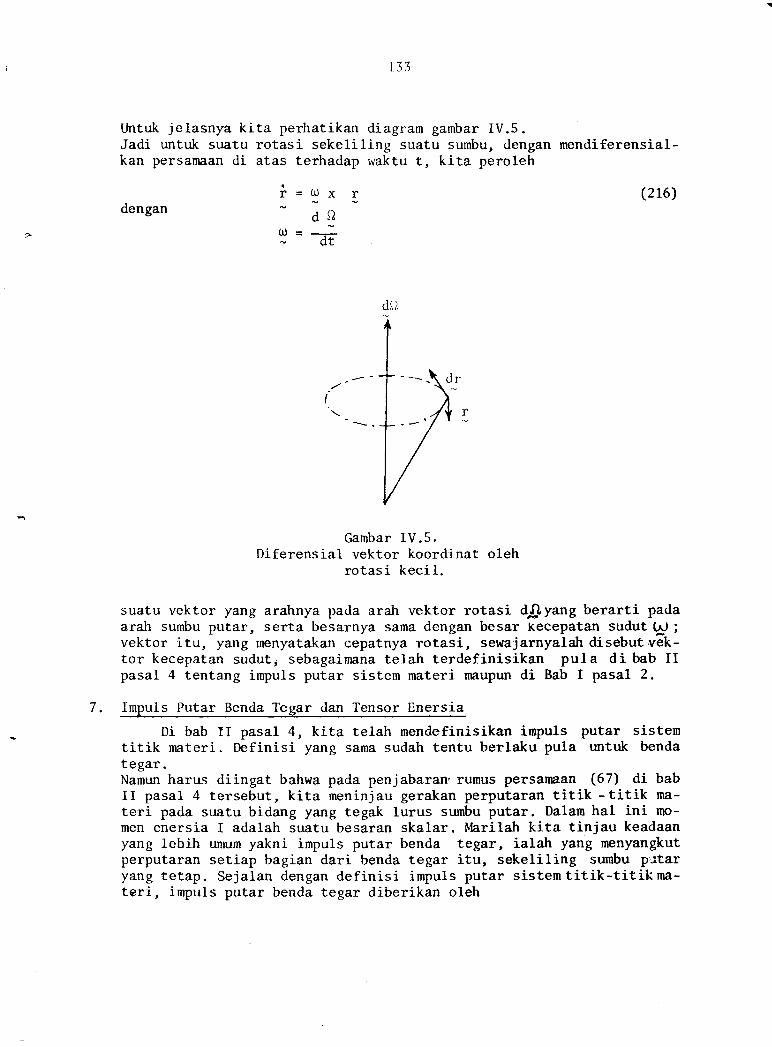
r33
Untuk jelasnya kita perhatikan diagram gambar IV.5.Jadi untuk suatu rotasi sekeliling suatu sumbu, dengan mendiferensial-kan persanlaan di atas terhadap waktu t, kita peroleh
(216)dengan
t.
Gambar IV.5,Diferensial vektor koordinat oleh
rotasi keci1.
suatu vektor yang arahnya pada arah vektor rotasi dpfane berarti padaarah sumbu putar, serta besarnya sama dengan besar Kecepatan sudut (4J ivektor itu, yang menyatakan cepatnya rotasi, sewajarnyalah disebut vek-tor kecepatan sudut, sebagaimana telah terdefinisikan pula di bab IIpasal 4 tentang impuls putar sistem materi maupun di Bab I pasal 2.
7. Impuls Putar Benda Tegar dan Tensor Enersia
Di bab II pasal 4, kita telah mendefinisikan inpuls putar sistentitik materi. Definisi yang sama sudah tentu berlaku pula tmtuk bendategar.Namtur harus diingat bahwa pada penjabaran,rumus persamaan (67) di babII pasal 4 tersebut, kita meninjau gerakan perputaran titik -titik na-teri pada suatu bidang yang tegak lurus sumbu putar. Dalarn hal ini np-men enersia I adalah suatu besaran skalar. l'{arilah kita tinjau keadaanyang lebih umum yakni impuls putar benda tegar, ialah yang nenyangkutperputaran setiap bagian dari benda tegar itu, sekeliling sumbu pltaryang tetap. Sejalan dengan definisi impuls putar sistemtitik-titilima-teri, impuls putar benda tegar diberikan oleh
1. =0JX f
d0o----dt
734
A=.f:xd(av)- =ufixf am
yang menurut persama an (ZL6), irr,r"r"r:"U,(-
U =J r xulx r dm- (^-? .=J r.r,r.dm _ J (3.g) g dm
Dengan menuliskan komponen-komponennya, persamaan ini memberikan
H =f oJ +f trl +I u)x xxx xyy xzzH =f ul +I trl +I u)y yxx j"yy yzz
H*=Ir*'**'rr'r*rrr^,atau disingkat
I=Ig (2LZ)
tetapi dalam hal ini, I bukan skalar, melainkan matrix yang eremen-ele-mennya ialah a))I*_=JU'*z')dm /^))I __ = I G' * z') dm (218)WU
r-- = ,f r*, * y2) dmzzvPf
I.-.- =-/x y dm I ._ =:) y x dnxyv'-yx.-/ffI--_=-f xzdm f =:l zxdmXZJ_ZxUrC
I__ =-l y z dn r --t z y dm'yr-J I L vttt 'ry-O
Jelaslah bahwa sebenarnya
I =Ixy yx
I =Ixz zx
tr, = t*yang berarti bahwa natrix I adalah matrix simetri.l,tatrix I di atas disebut tensor enersia atau tensor momental dan ele-men-elemennya selain Ir*, 1yy, lrr, disebut enersia silang (product ofinertia) r t
Dari hubungan persanaan (217), secara aljabar vektor, dengan I eda-1ah fungsi koordinat-koordinat x, y, z, matrix I boleh dipandang seba-gai matrix transformasi yang mentransformasikan vektor rrl menjadi vektorH.
1
Maka pada umumnya tl tidak sc
Jikalau eigenvector I akoordinat benda S' sedemikiatuk misal.nya
Kita hendakeigenvector
apakah
I,danv
lah orth+R.R
(.219) ki
Br* rrB,
= (I*R1.)
!
=RlTx-1 x
Sedangkan
(IBr) * Bz
sebab matrix I.Iadi
dapat dipilih sistemdiagonal, dalam ben-
I memang orthogonal. MisalnYa
t2 le)
P,gonal, makaga I adalah
, .i5
arah dengan
dalah orthon rupa hing
0)0lvl, r)
eigenvector:
0
I
0
*r'\ (*tr_1.-Yzl Rr= l',II
', ) [',
aku eigenvaluenya,
tro, IR, = IrR,
bi I amana
R^' R- = 0-) 15
tkan
*8,
(I
Br= I-lI
\I sel
Z
IR, =
ogonal
=03
ta dapa
=IR-y*L+
Rz
82=I-I
l,,.'l81=lrrl
L,,JMaka dengan I*,
IB1 = I*Rl
Eigenvector ada
81*Br=oDari persamaan
Br* 'B, =
(rR1) + R2
( ,.r= lo
[,menelitiI ialah
rieel.
-Br*'*Br=adalah simetri
** Bro B,
* Br* *,
R-* IR^ = r.RlR^-IyLZ
dan elemer-"rJr"rnru
I*Br* 82 = i, Br* 82
Ini hanya mungkin apabila
Br* B, =
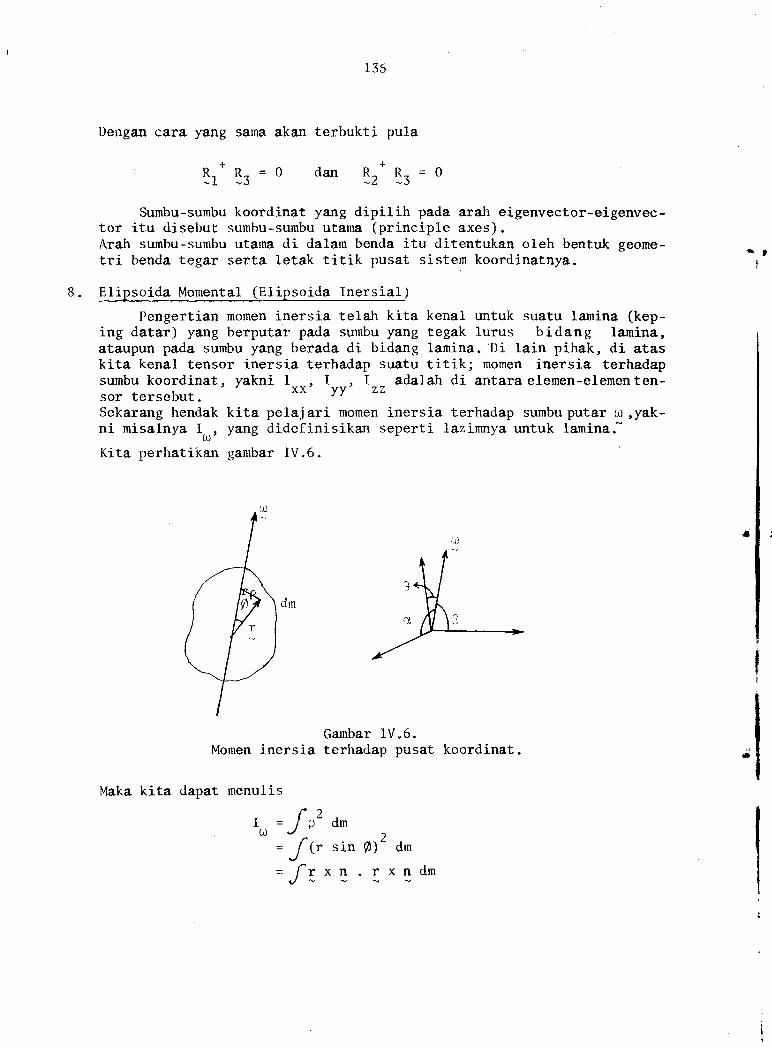
t35
Derrgan cara yang sama akan terbukti pula
tr* t, = o dan tr* ls=oSumbu-sunbu koordinat yang dipilih pada arah eigenvector-eigenvec-
tor itu disebut sunbu*sumbu utama (principle axes).Arah sumbu-sumbu utama di dalam benda itu ditentukan oleh bentuk geome-tri benda tegar serta letak titik pusat sistem koordinatnya.
8. Elipsoida Momental (Elipsglda Inersial)Pengertian momen inersia telah kita kenal untuk suatu larnina (kep-
ing datar) yang berputar pada sumbu yang tegak lurus bidang lamina,ataupun pada sumbu yang berada di bidang lamina. Di lain pihak, di ataskita kenal tensor inersia terhadap suatu titik; momen inersia terhadapsumbu koordinat. yakni I I , I adalah di antara elemen-elementen-sor tersebut. xx' YY' zz
Sekarang hendak kita pelaj ari momen inersia ter:hadap sumbu putar o ,yak-ni nisalnF Ir, yang didefj-nisikan seperti lazimnya untuk lanina.-Kita perhatikan gambar IV.6.
Gambar iV.6.Momen inersia terhadap pusat koordinat.
.tI
I1l
Maka kita dapat nenulis
1='[oz a^* =-_[G sin o)2 dm
= f t x n . r x n dma,/
\l
L37
dengan n sebagai vektor satuan sepanjangAkan tetapi
u.
T X n. f X n =
"lx
cos0
uI
x
cosct
"suz
vcosB
n.n.n.
n
::,[
e?
yzcosB cos0
coso =
cos$ =
cosD =
yaitu komponen-komponenJadi
e
u1
ez
e-J
pada arah sumbu-surpbu e.
"3uz
, =|-"1x
cosct
"z usly ,lcosg
"osa I
dmyzcosB cos8
"or2o dm2;
"or2g d,
yz) "o.2a
d,-zf
yakni
- 2 f ... dm.)
L..= I cos2cr * r .or2B * I "or2awxxyyzz
* , t*, coso cosB * 2 l*, coso cosD
* , ,r, cos6 cosD
Persamaan ini adalah suatu persanaan elipsoida dengan I**, I*r. .......dan seterusnya selaku parameter-parameter dan cos o,, cos B, cirs 3 se-laku variabel-variabelnya. Elipsoidld yang diberikan olehpersamaan ter-sebut, disebut eLipsoida momental atau elipsoida inersial-Ka1au sumbu-sumbu koordinatnya dipilih sepanjang sumbu-sumbu utama, na-ka
= f (y2*rz)'*f7*2 *,
"*J{*2 *
dm
-0=Q=Q
(220)
sehingga persamaan
f = r cos2o(r)x
yz
elipsoida rnenjadi
+r .or2B*I "or2ayz
xy xz
(2?L)
-4
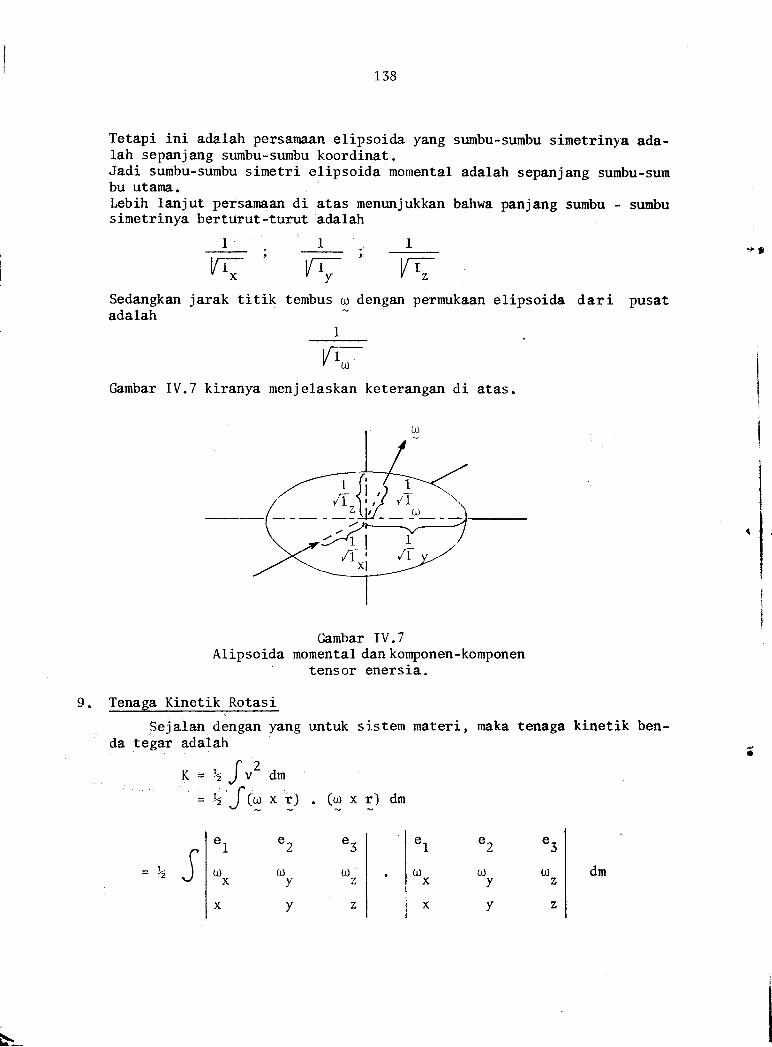
138
Tetapi ini adalah persanaan elipsoida yanglah sepanjang sumbu-sunbu koordinat.Jadi sumbu-sumbu sirnetri elipsoida momentalbu utama.Lebih lanjut persamaan di atas menrmjukkansimetrinya berturut-turut'adalah
sunbu-sumbu sinetrinya ada-
adalah sepanjang sunbu-sum
bahwa panjang sumbu - sumbu
1,-t
ll r,y
I
v,
l/-t-Sedangkanadalah
jarak titik tembus o dengan permukaan elipsoida dari pusat
I
Gambar IV.7 kiranya menjelaskan keterangan di atas.
Gambar IV.7Alipsoida momental dan komponen-konponen' tensor enersia.
9. Tenaga Kinetik.RotasiSejalan dengan yang untuk sisten materi, maka tenaga kinetik ben-
da tegar adalahf')K=LJv-dm
=l'%J(urxr) (c,rxr) dm
t2
OJ
v
v
"10)x
x
e-J
0)a
tZ
(,v
v
"1OJ
x
x
e-5
k)
z
L
='\4 J
139
I'I
yang dengan definisi yang diberikan oleh persamaan (218), nenjadi
)))K=\ r**r* *\ rrrry *r, Irr^r"* t*r**', * I*r'*'* * 'rr'f ,
selanjutnya dengan nengingat(t) = tdc6S dxO =tJCOS 6yl
"
='cos d
dan persamaan (220) akhirnya kita peroleh)K=\ Irr' (222)
Hendaknya diingat bahwa tenaga kinetik K dihubungkan dengar $2 o'lehmo-men enersia terhadap sumbu putar I, , Iakni oleh suatu skalar, sedang-ka., E dihubungkan dengan td oleh suatu tensor enersia I, yaknioleh sua-tu matrix, bukan skalar.Namun demikian, dengan memilih sumbu-sumbu utama seLaku sunbu - sunbukoordinat, kita dapat menulis
H=Itl')e.+I0le-+I111e-x x L yyt z z5
=\Iu2 +LiIw2 +ltI $2xx 'yY ' z z
yang menghasilkan
r=!:u.g Q23)yang analoog dengan tenaga kinetik titik nateri untuk gerakan transla-si
v - 1. 1n -. 2 r. V
dengan I iaiah impuls m y.Lebih lanjut, karena H dan K tak tergantung pada sisten koordinat ben-da maka persamaan (2lT dan persamaan (222), herlaku umum.
10. Persamaan Gerak Euler
Analoogi antara gaya dengan irnpuls Eaya, yakni antarad1
I=aE dengan I=#kiranya mudah dimengerti txrtuk benda tegar yang berbentuk lamina y'angberputar pada sumbu yang tegak lurus bidang lamina.Akan tetapi kita telah nendefinisikan impuls putar H secara urnum yakniterhadap suatu titik sehingga pada ununmya I tidak Sejajar ur.
-t
L40
Kita hendak meneliti hubungan antara impuls gaya T dengan momenenersia I nelalui hubungannya dengan impuls putar H.Sebelumnya perlu diingat bahwa dalam penjabaran peisamaan (217), H =I o, tensor enersia adalah frmgsi tetap dari koordinat-koordinat 5a-giin-bagian benda, di dalam sistem koordinat S' yang berputar bersamabenda. Jadi I berharga tetap terhadap waktu. Namun demikian persarnaan(70) dan persamaan (217) tidak berarti
T=Imelainkan
I=r1i1 +IurAkan tetapi tidaklah mudah menyatakan i dari I. Maka Euler menerapkanpersamaan (70) untuk benda tegar dengan meninjau diferensial H.Seperti pada pembicaraan hal rotasi kecil, kita tinjau perubalian$ ter-hadap,aitu yrtri fi ai aafam sistem koordinat ruang S dengan nanl sis-tem koordinat benda Sf mula-mula berimpitIvlaka dengan mengingat keadaan mula-mula
H -ll e, + H e^ + H e- = H e- + H e^r + H et-^; x-I '-y-2 "z-3 "x-t "y-2 "z-3
perubahan H terhadap waktu diberikan oleh
* (H*6t'* Hr6rt+ Hr6rt)
Suku kedua ruas kanan adalah berhubungan dengan perubahan $karenater-bawa rotasi benda. Tetapi pada keadaan mula-mula et = e ; maka
!= (H*"t *ry.Z+Hre3)
* (Hx61, * nr'r' * Hz6S')
Selanjutnya dari persamaan (2i3), dan persanaan (215) kita dapatkan
6l' = g *"t
6r' = g*"2
6, = 1*"3sehingga kenudian kita tuliskan
+ urx (H
=He-+He^+xI yl
+He-lz5'
*"1 *'r"r*Hrus)
ul
$ = iir*er' * ir.rL + Hrer')
I=(H*er*nr",
H e- + urxHz5
s-

14r
Lebih lanjut, karena i*, i, da, i, adalah perubahan H*,
hadap waktu pada saat mula-mula, pada saat rnana er = engan S) maka untuk saat itu, di dalarn sisten koordinat
H=Ioyakni
aH=I uJ +I rrl +J rjxxxxxyyxzzH=I uJ +I rrt _ u)v YX X +Iyyyyzz
H dan H ter-yz(Sf berimpit de-ruang S berlaku
t224)
I (i +I t]l +I nzY\xzyyzzzsehingga akhirnya dengan mengingat persamaan (2L7) dari persamaan (70)
dH
:. dt
kita peroleh apakoordinat ruang
disebut persanaan gerak Euler di dalan sistem
a =ft =l uJ +I 0j +I u)xxxxxxyyxzz+ rrr (I uJ + J uJ + I u.r )*Y'-zx -x -zy --y -zz -z'
-o^(I {J + I trl. + I--to-)*2'-yx-x -YY Y Yz z'
r = H = f il + I 6 + ...-yyyxxwy,r=ir=Ir*i**
yang apabila untuk sumbu-sumbu koordinat benda elt, e.t, o,t dianbil
yang berimpit dengan sumbu-sumbu utama benda, menjadi
H=z
r = I 6 + (Ixxxz
,y=ry6y*(I*
Iyang
-I)ury'z
-I)urz'x
ulv
Lr) 7
,, = I, *, * (r, I*) ,y ,*
Penerapan khusus persarnan Euler (224) ini nisaLnya stratu masa-
lah yang diielicliki oleh Poinsot (Poinsot problem) pada-tahrm 1834, ialahtentang-gerakan perputaran bebas (tiada impuls gaya) benda legar ber-Uentrri."sfiheroida yang berputar pada sunbu yang tidak berimpit dengan
sumbu simetri benda (sumUu utama benda). Kalau elipsoida nenpunyai 3
sumbu simetri, maka ipheroida hanya nempunyai 2 sumbu simetri.
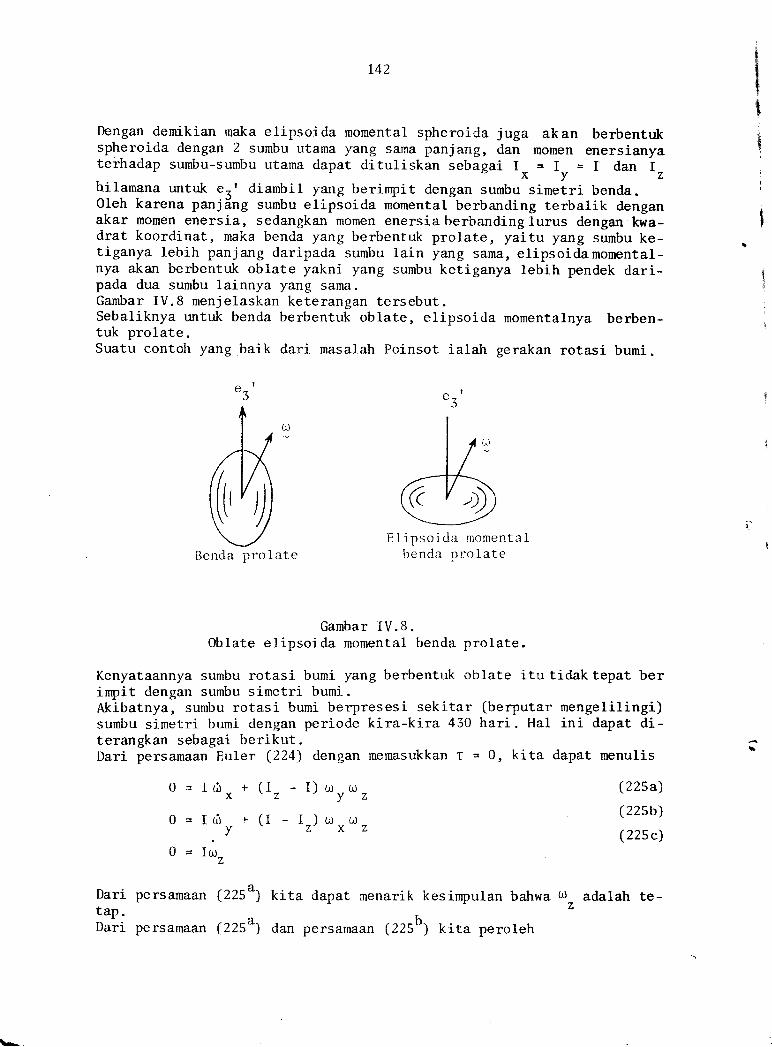
t42*
It
tDengan demikian maka elipsoida momental spheroida juga akan berbentukspheroida dengan 2 sumbu utarna yang sama panjang, dan momen enersianyaterhadap sumbu-sumbu utama dapat dituliskin sebagai I* = I, = I dan i,hilamana untuk e.t diambil yang berimpit dengan sumbu sirnetri benda.01eh karena panjing sumbu elipsoida momental berbanding terbalik denganakar momen enersia, sedangkan momen enersia berbanding lurus dengan kwa-drat koordinat, maka benda yang berbentuk prolate, yaitu yang sumbu ke-tiganya lebih panjang daripada sumbu lain yang sama, elipsoidamomental-nya akan berbentuk oblate yakni yang sumbu ketiganya lebih pendek dari-pada dua sumbu lainnya yang sama.Gambar IV.8 menjelaskan keterangan tersebut.Sebaliknya untuk benda berbentuk oblate, elipsoida momentalnya berben-tuk prolate.Suatu contoh yang baik dari masalah Poinsot ialah gerakan rotasi bumi.
Benda prolatef:lipsoida momental
benda nr:o1ate
Gambar IV.B.Oblate elipsoida momental benda prolate.
Kenyataannya sumbu rotasi bumi yang berbentuk oblate itu tidak tepat berimpit dengan sumbu simetri bumi.Akibatnya, sumbu rotasi bumi berpresesi sekitar (berputar mengelilingi)sumbu simetri bumi dengan periode kira-kira 430 hari. Hal ini dapat di-terangkan sebagai berikut.Dari persamaan Euler ('224) dengan memasukkan T
0 = I6* * (12 ,) rrr,
= 0, kita dapat menulis t
(22sa)
(22sb)
(22sc)0=Itir +(I-I)o ury-z'xz0=iur
7
Dari persamaan (225\ kita dapat menarik kesimpulan bahwa o-tap. ^ r
Dari persamaan (225\ dan persarnaan (225b) kita peroleh
"3
adalah te-
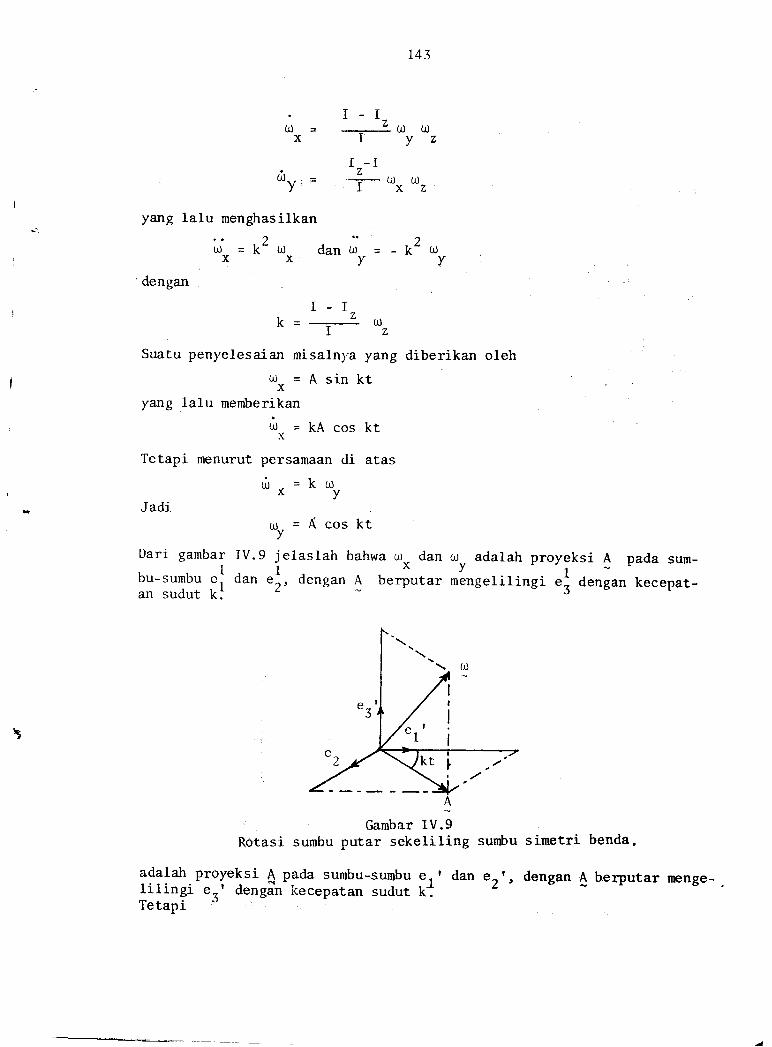
143
6y=
yang lalu menghasilkan)
uJ -l( Loxxdengan
I-Ik=-:J uJLZ
Suatu penyelesaian misaln),a yang diberikan oleh,r=Asinkt
yang lalu memberikan
n =kAcosktx
Tetapi menurut persamaan di atas
6 =kulxyJadi
uJ = A cos ktv
Dari gambar IV.9 jelaslah bahwa o-- dan o-- adalah proyeksi A pada sum-.ll xYlbu-sumbu ei dan ej, dengan A berputar mengelilingi ef dengan kecepat-an sudut kl
I-I zu u)Iyz
I -Iz
-
0J 0-)Ixz
")dan ut = - k- trtYY
Rotasi sumbu putar sekeliling sumbu
proyeksi A p."d" sunbu-suqb, "l' dan err,"3' dengan kecepatan sudut ki
sinetri benda.
dengan A berputa.r nenge-
o=x
1
adalah1i lingiTetapi
Gambar tV.i
9='*"lt**r"rt * @it
=A*rr"Jt91:l^I.T\?-\, tetap d* 4 berputar, naka t,^r berputar menselilingi "3'cengan perrode
2n, =_E_
Periode ini ialah periode dari apa yang disebut presesi.Selanjutnya, karena I = O, maka pastilah H tetap diam di dalam sistemkoordinat ruang S. (Ingat H berputar di dalam sistem koordinat bendas') .
t44
Jadi perputaran benda tentu sedemikian rupabenda berputar mengelilingi sumbu simteri ".t idilihat dari luar benda, H tetap tinggal diaffi.Jadi dengan sendirinya dilihat dari luar benda,tar mengelilingi H.
Lebih lanjut, dari persamaan (217)
H=Ittt
kita dapatkan
I=Ir*"lr +f ry"2r +1r^r"S'
= [ (rrl e.' + hJ e^t) + J uJ n-r-xI y I Z Z J
= I I * Ir*r.S'
Yang berarti H sebidang dengan A dan e,'.Gambar IV.10 frelukiskan apa yan! sebendrnya terjadi.
A
Hz
{Iz
berarti
Vektor
hingga ut dan H di dalamtetapi di lain pihak,
"3t sudah tentu berpu-
HHx_yU.) tr)xy
I>I
HHHzxy =-^, 0t 'yberarti I < I
Gambar IV.10 z
dan vektor sumbu putar benda spheroidal
Z
impuls putar
ls-_
14,
Untuk benda yang berbentukluar terhadap err dan Yang
oblate, I- ( I sehingga H ada diprolate ' adatah sebaliknYa.
sebelatt
L1
Perputaratr G"t dan t^t sekeliling H sebagainana terlihat dari luarbenda, dapat ditr.diskan ilengan menglulingnyi apa -yang disebut kerucutbenda (boiy cone) pada dindlng *p""|ang disebut kerucut ruang (sp'ace
cone) seperti yang terlihat di gambar IV.11.
Ganbar IV.11KerucutruangclankerucutbendadalammasalahPoinsot.
Garis sepanjang I-l ada1ah tetap tinggal dian dan-disebut garis tetap(invariaLle line|, sedangk"n Lidang yang tegak lurus ini, juga tetapdan disebut bidang tetap (invariable plane) '
Persamaan Euler depgan Sudut-sudut Euler
Persamaan Euler dengan sudut-sudut Euler selaku variabel-variabeldapat diperoleh dengan p6rtolongan persamaan- Lagrange, yakni dengan ne-
,ry.t.k.n^ impuls gaya .rrl* (generalized force) Q, menurut persamaan
( 13s)
d 'EK. aK-ar (-tr) - Ea; = o,'l 'l
Dalam hal ini koordinat umum q: ialah sudut-sudut Euler -q, 9, ^d"tt v,
sehingga tecepatin;;; t, i"itr-, kecepatan-kecepatan sudut q, 0, dan
V.Nlaka langkah pertama ialah menyatakan '*, 'y, dan o, dalam hubuni;annya
dengan rp,O dan Y.
t46
LJntuk itu kita tinjau langkatr--langkah rotasi sistem koordinat sepertiyang dijelaskan dengan gambar IV.2.iradi rangtah transformasi pertama, tf adalah pada arah ear , sehingga
I = t0 er' (1)
Demikianlah pula untuk langkah-langkah transformasi kedua danberlaku
o = o. ei(2)
Y = Y ea'(3)
Adapun o* tak lain ialah jumlah komponen vektor-vektor t , 0 dan
arah sumbu X terakhir, yaitu pada arah "rt('),;.d"t trl, ialah yang
atah e)(3), dan u.r, ialah yang pada arah er'(3) ' jadi
,* = g. "r'(3) . g . "r'(3) . t . e,'(3)
,y = g. .r'(3) . 9 - "r'(3) . !. er' (3)
,, = g. "r' (3) . i. er' (3) . !. er' (3)
yang dengan mengingat hubtrngan dalam persamaan 1226) di atas, sertarengirgai persamaan langkah-langkah transformasi di pasal 4 di atas,yakni
"r'(1) = cos Q. *rr + sin Q. "z^ '(1)"2't
' = -sinQ. "L' + cos (|.
"Z
er' (1) =
^,(2) -6 '(1)
")'"'
- '1 cos o'
"r ' (1)
+
er'(2) = -gin o' "r'(1) +
e1'(3) = cos v' er'(2) + sin Y'
.r'(3) = -sin Y' "r. '(2) * cos Y'
ert (3) =
nenjadi
Q26a)
ketiga
(zz6b)
Q26c)
Y pada
pada
I
i
J
sin o. er' (1)
cos o. er' (1)
^ ,t2)"z
^ ,(2)"2
^ '(2)v-5
t47
,* = Q er' (1)."r' (3) + 0 e, ,(2') . er, (3) * ,i, "r,
(3}.e1,(.3)
= Q "s'(1).(cos Y."r'(2) + sin Y.er'(2)',
* o e1 'Q) .(cos Y.er ' (2) + sin Y.er'(Z)
* Y"3' (3) .e1 '
(3)
= 11 "s'
(1). {cos Y.er' (1) + sin V (cos o.er'(1) + sin O.er' (1),
*OcosV+0
=QsinVsinO*OcosYdan dengan jalan seperti itu akan kita dapat
,r=TcosYsin.O-0sinY
,r=Qcos0+ V
dan kemudian untuk suatu spheroida kita peroleh
211 =!Itrt +t, l,62 *l;l ,2-x'y-zz
- )z r (q2 sir,2 o * o'l * \ rrtg2 .or2o, i' . 2 t1 .or o. i;(227)
tI
ara
Dari hasil ini kita peroleh3x'. = I0ao
34 = Iro rir2o * I 0 .or2,-., * I v cos o\zza(p
AK"" - I u/ + I 0 cos 0 ur L L \o7
ON
a0AK
4aL
AY
') ')= I(0' sino cos 0 - Tr9' cos 0 sin,O - IZQV sin 0
=Q
=Q
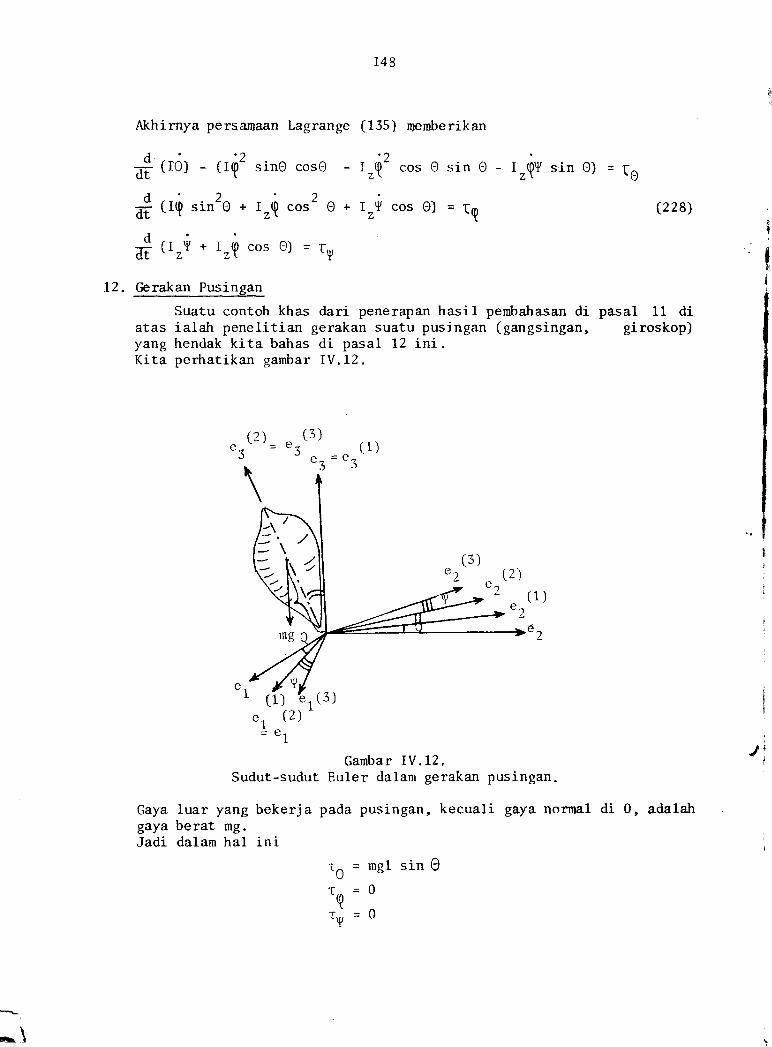
748
Akhirnya persanaan Lagrange
t' itor - (r,i' sino coso
# trg ,ir,2o * rrQ "or2 o *
# ,rr'i' * rrtp cos o) = fy
(135) nemberikan
')Irt{- cos 0 sin 0 -
frY cos O) = (q
0) =fo
(228)
I 0Y sinz\
dit
t12. Gerakan Pusingan
Suatu contoh khas dari penerapan hasil penbahasan di pasal 11 diatas ialah penelitian gerakan suatu pusingan (gangsingan, giroskop)yang hendak kita bahas di pasal 12 ini.Kita perhatikan gambar IV.l2.
(3)
c- = €,5.)(1)
(2)
e.)(1)
€z
er#' (r)1
(3)
(2)3
\
tz
"1 Q)=€1
JGambar IV.12,
Sudut-sudut Euler dalam gerakan pusingan.
Gaya luar yang bekerja pada pusingan, kecuali gaya normal di 0, adalahgaya berat mg.Jadi dalam hal ini
= ngl sin 0-0=Q
totqtv
-\

t49
Dari kedua hubungan yang
--(pdt
&v-?T
yang berarti= tetaP = H* misalnYa
= tetap = Hy misalnyaTetapi, karena
maka ,} - {}': =n: u'"'*
,,(o - -:'aqaq
.. aL bKLY=;aY av
Dengan demikian, persamaan {228) menghasilkan
akhir ini kita lihat
=tQ=o
=tv=o
nq
nv
= -Jr*qo = ,
" ')I0 - IQ- sin 0 cos 0')2^
I0sin-OrI0cos-Ot. zl
irV * IrQ coso = fr*
')+ IrQ"sin O cosO + Iz(tV sin 0
+ IrY .orO = fr*
= mgl sin A i229)
(230)
l23t)
Pada dasarnya dari ketiga persamaan simultan ini dapat diperoleh 0, Q,dan Y sebagai fungsi waktu t. Namun karena rumitnya dan kurang kegund-annya, tak ada orang yang suka mencoba menyelesaiakannya.Penyelesaian yang kita perlukan hanyalah yang berhubungan dengan gejalafisis yang teramati saja, misalnya yang menerangkan bergoyang-goyangnyaatau nutasi (nutation) dan berputar kelilingnya atau presesi (preces-.sion) sumbu simetri pusinganSuatu hal yang kita mengerti ialah bahwa tenaga total E adalah tetapapabila desipasi panas oleh gesekan diabaikan. Tenaga total E ini ter-diri atas tenaga kinetik putaran K dan tenaga potensial gaya berat V =mg1 cos 0. Inj- berarti bahwa variasi 0 terhadap t yang berarti variasi Vterhadap t, akan harus dikompensasi variasi K terhadap t; yakni sewaktuV naik, K harus turun dan sebaliknya.Variasi 0 terhadap t ini ialah apa yang kita lihat sebagai bergoyang-go-yangnya sumbu simetri, sedangkan berputar kelilingnya sumbu simetri ter-nyatakan oleh variasi tQ terhadap t.

150
\dapun Y adalah pacla arah 9r'(tl, sehingga V tak lain ialah kecepatanrotasi (spin) pada sumbu sifietri.Lebih rnudah hendak kita teliti lebih dahulu berputar ketilingnya pusingan.Dari persamaan Q30) dan pcrsanaan (23L), dapat kita tulis
6 = H* - l{n-cos o
' I sin'O(232)
yang berarti kecepatan presesinya tergantung pada 0; apabila 0 berva-riail terhadap waktu t, yang berarti terjadi nutasi, makakecepatan pre-sesinya juga bervariasi terhadap waktu. Sebagaimana diutarakan di atas,variasi 0 terhadap t adalah berhubungan dengan pertukaran antara tenagapotensial dan tenaga kinetik.bari persamaan (227) serta mengingat V = mg1 cos 0, kita peroleh tenagatotal
t233)
E=K+V
= % IO2 * \Iqz sir,26 * li lrurz + mgl cos 0
Suku pertama ruas kanan persamaan (233) ini ialah tenaga kinetik yang
bersangkutan dengan rebah jatuhnya pusingan, sedangkan suku kedua ruaskanan, berhubungan dengan seolah-olah adanya gaya sentripetal y-ang meng-
akibatkan pr"t"ii; suku ketiga tak lain adalah tenaga kinetik rotasi(spin) pada sumbu simetri.
Selanjutnya dengansamaanrr=QcosO+Y
persamaan (232) untuk mengeliminasi t{, dan per-yang telah kita peroleh di atas untuk'menyatakan
Hu-+ '-, I + ngl cos 0 (234)
ul., serta persamaan (231) untuk mengeliminasi Y, persamaart(233) di atasakan ternyatakan sebagai
12l'tJ sin"o
yang sepenuhnya menyatakan 0 sebagaiUntuli singkatnya, kita tulis
fungsi O saja.
E=\I02*F(O)yang lalu nremberikan
F)
Sebagaimana F tergantung pada O maka begitutlargi O akan maximum apabila harga oadalahtrerharga minimum.
pula halnya dengan 0.sedemikian rupa sehingga
I sin2 o
\
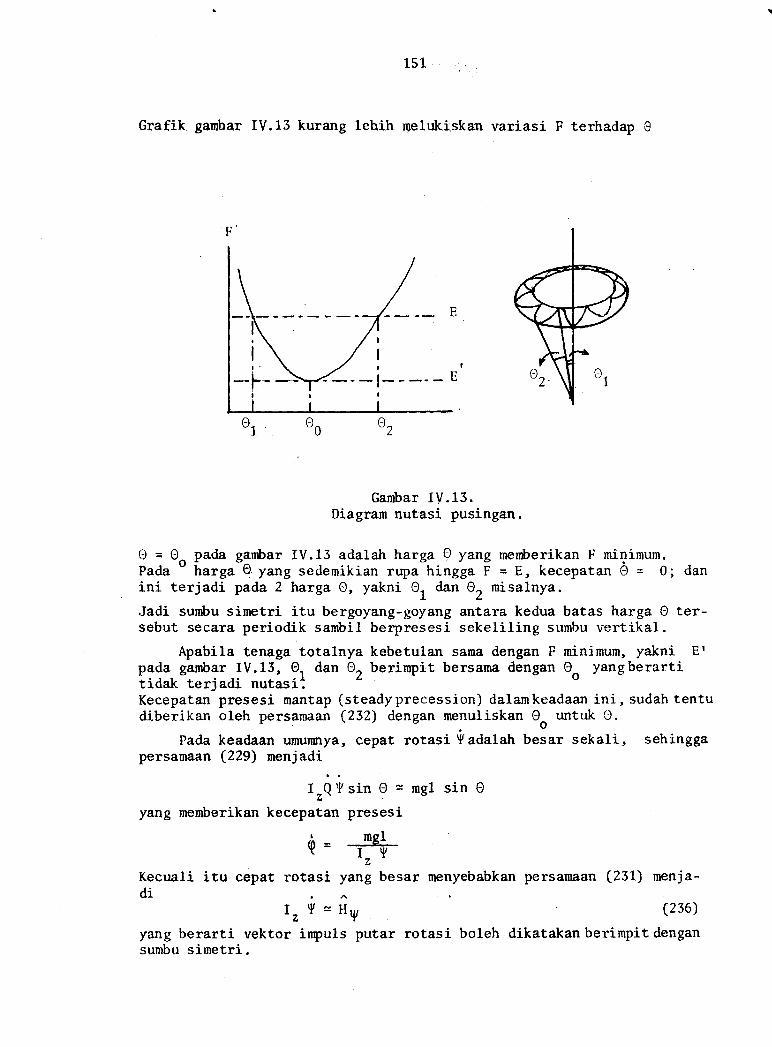
151
Grafik ganbar Iy.13 kurang lebih 4elukiskan variasi F terhadap 0
Ganbar Iy.13.Diagran nutasi pusingan.
0 = 0^ pada ganbar IV.13 adalah harga 0 yang merberikan F milirnum.Pada u trarga-Q yang sedemikian rupa-hingga F = E, kecepatan 0 = 0; danini terjadi pada 2 hatga 0, yakni O, dan 0, misalnya.
Jadi sunbu sinetri itu bergoyang-goyang antara kedua batas harga O ter-sebut secara periodik sambil berpresesi sekeliling sumbu vertikal.
Apabila tenaga totalnya kebetulan sana dengan F minimun, yakni Erpaqa gambar IV.15, 0l dan 0, berimpit bersarna dengan 0o yangberartitidak terjadi nutasii L
Kecepatan presesi mantap (steadyprecession) dalamkeadaan ini, sudah tentudiberikan oleh persamaan (232) dengan menuliskan 0^ untuk 0.
Pada keadaan umumlya, cepat rotasi ti'adalah U"3", sekali, sehinggapersamaan (229) menjadi
Iri v sin o = mgl sin o
yang menberikan kecepatan presesi
rh = InglYIY
zKecuali itu cepat rotasi yang besardi
IrY=Hnrnenyebabkan persamaan (231) menja-
(236)
dikatakan berimpit denganyang berarti vektor impuls putar rotasi bolehsumbu simetri.
/
DAFTAR PUSTAKA
1. S,!V.Mc Cuskey, ttAn Introduction to Advanced Dynamicsrt, Addison-Wesley,1959.
2. H.Goldstein, rtClassical h{echanicsrt, Addison-Vbsley, 1959.
S, J.L.Synge &. B.A.Griffith, 'rPrinci.ples of lbchanicsrr, ].{c Graw Hil1, 1959
4. W.D.Mac Millan, r'Statics and the Dynamics of a Particle, Mc Graw Hill, tL927.
5. W.D.Mac Millan, r?Dynamics of Fligid body", Mc Graw Hill, 1936.
6. H.C.Corben 6 Philip 'Stehle, tfClassical Mechanicsr', John Wiley 6 Sons,1960.
7,R.A.Becker,rrAnIntroductiontoTheoretica1It1edtanics|l,McGrawHi11,
8. A.Sommerfeld E M.O.Stern, "Mechanics't, Acadenic Pr6ss'Inc., 1961
Action, azasvariabel
Aphelion, l9.Apses, 19
- terkecil , gl,gz' ,94, 9524, 27, 2g
1s3
INDEX
Hamilton-Jacobi, persamaan _, g0,gB, 90,.95Holonomic qonstraint, 64Holonomik, 61
kaitan _, 64, 66, 62.Huktrm kekekalan impuf r,
-SO
, Sl, 4gHukrryn kekekatan t"il;;';k_it, 3,4,. 17, 29, 25, -3g,;)*.
Hukum Newton, j0, 3f ' --
Jnrna"t parameter,. 42Impuls gaya, l4OImPuls_putar,
!9, t7, 32,3J, J5,_ 36, 42, 104, l-ss, i+0,'rsrITtrJ: ,Trm,
' 71,_7i,
-;o; gi_60
J-acoDl, determinal _, i00, 102Kanonik, hubungan _, 73transformlri _, 80, g1, 99Kecepatan, _ hil ang, 26- relatif, Sg_ sudut, 7, B, 33r ISsrumus _ 6, 7,- transport, g
umum,69,7LKeppler, hukun _ , 20, 26- 27Kerucut benda, 1,4; ' -- 'Kerucut ruang, 14SKoefisien restitusi, J9Koordinat, _ siklik, ;e
transformasi _, g1- umua, 69, 7-1r_ 72, 73, g0,
96, 145
,!opl anar, ge rakan _ , 16koriolis, gaya _, 7efek _,11
,, kofuksi _, g, lZ, 13Kurung Lagrange, lOZ, 10JKurung poison, 103, iOgLagrange, - bracket, loz
fungsi -, gi, 67, 7r, 22, 74,
kurung _ , 702,103- multiplier, 65persanaan _, 59, 61, 66. 6r
,Tirt. action ,ril;rJtt;,'ii gi, iri
L.rovi I le ^-
teorema _ , l0gHassa tereduksi, S3, 54Matrix pauli , l'ZgI4atrix transformasi, llS, lltIUedan gaya konservatif, iMomen enersia, 33, 6 T,'L36. 1.39140',Mornen Eaya,34- 36
&.Back scaterring, SlBandul Foucolr]'fOBenda tegar, rnekanika -. 113
3ffi":j#: i;l* -, is,',''"CayI ey-Klei n -o;ii.iu",;;";,X3"T"1;:u; : t1o,
7zoDeterninan -.lacobi
, '160 -"', u:
Di fferenti alEk,;;;;i;;;;,:T: iil.ii,, o,Elipsoida , tsi , rig,
-i+i'_ enersial, 136, lS7 , l4ZEnersia silang, 134 ' ,
ls9ape velocity, 26Euler, teorena -, l1g, 11g. 1,Zlsudut _, LZ4, 126, f+i,^i+gpersamaan. _,^1j9, 141, l4Z, 14SFungsi generasi, eS, s+, A6,'es, 97 ,tungsi karakteristik, g9Fungsi transfornasi, g6. 114Gangsingan, 14g --' "v' rtrGaya, - Coulonb, 40
- dalam, 52, 40, 56, 57. Sg_ elastis, 20 ''_ gravitasi, Z0- koriolis, 7, g- luar, S0, .3i- sentrifugal, g_ sentripetal, T, g
umum, 60, 145ueneralized force, 60, I4SGenerating function, aS-'-lt'?:kop,148:I"o."n porensial, 4uravrtasirgsla_rZ0
hukumNewton-r 26percepatan-rZ0r26.tetapan_,26namDuriu:l , 40, 43
rumus - Rutherford, 46
Hani r !ifl'";,; 1r,' ull,, u3: ;o , el , s3azas variasi _ 79, -AZ
fungsi - , !1, 74', BZ, 88, 8e,92
persamaan - -! 7!t 74, 75, 76,
lrr, 78, 81, 8i, 8i ,
154
aI
Newton, hukrrn -r. 7, 9
Nutasi, 150, 151
&late , 142, 145Osilator harrnonik, 86-89, 98Paranreter benturan, 42, 43Parameter C'aYleY-K1ein', t24, L26'Pauli, matrix -, L28Percepatan, - koriolis, 8
rumus - ,' 6, 7
- transportr 8
Perihelion, 19, 24t 27, 28Persamaan, - Euler, 139' l4l
- Lagrange; 148Poi'ncare, 98, 99, 102Poinsot, - problen, 141Poison, kurung -, 103Presesi, kecepatan -r 150
periode - , 744- pusingan, 149- srmbu rotasi btrmi, L42
Principle axes, 156Product of inerti a,' L34Prolate, 142, 145Pusingan, gerakan -, 148
Rigid body, 113Rolasi, - kecil, 104, 130'
vektor - , 732Routh,cara-r76
fungsi -, 76, 77
Ruang, - fase , 7L, 80, 81, 82, _87,88, 91, 94, 95, 99, 100,lo2, 109
- konfigurasi, 68, 7L
- spin, 124, L26, 128Rutherfordrrumus- ,46Semilatus recttrm, 21, 25
Sentrifugal, gaYa ', 7
koreksi -, 9Sentripetal, gaya - , 7, 9
Sistem tooriiiai, - benda, 113, 114,130,139,168
- berputar, 5r 7
- Iaboratorium, 47, 50' 51
- Polar, 5, 59, 74.- ruang, 113, 114, 118, 130 ,
141
- titik berat, 50, 51- qrmwt, 61
Sistem mekanis, 55, 57, 69, 91
Space cone, 145Spheroi.da , l4t, 142, 147Spinor, ruang -, lZ4, L26, 128Sudut fase, 98Sunbu rotasi bumi, 142Sunbu utama, 136, 139Tampang lintang diferensial 43,51Tenaga-kinetik, 3, L7, 31,'32, 34,
37, 62, 63, 74
- osilator hannonik, 63- rotasi, 138, 139- sistem, 61, 70, 72
Tenaga potensial, 4, 17, 63, 69, 73
- osilator harmonik, 63, 86
Tensor enersia, 133, 134, 136, 139
Tensor momental, 134Teorena Euler, 118, 119, 121Titik berat, 29, 37, 48, 57Titik materi, 3Transformasi, fungsi -, 114
- kanonik, 81, 89
- koordinat, 81natrix - ,115- orthogonal, 1"13, 115, 118, I
Tnrnbnkan , 36, 37 , 38
- elastis, 38, 40- non elastis, 38, 40
Usaha, 3, 69- semu, 55-59
Variabel action, 94, 95Variabel sudut , 94, 96' '
Vektor inrpuls putar, 151
.ff"a {ir:ur?^ e" 1993 i 1994






![[Rosyid] Mekanika Klasik](https://static.fdokumen.com/doc/165x107/54a38f46ac79593d108b4593/rosyid-mekanika-klasik.jpg)